WO2022014174A1 - 情報処理方法及び情報処理システム - Google Patents
情報処理方法及び情報処理システム Download PDFInfo
- Publication number
- WO2022014174A1 WO2022014174A1 PCT/JP2021/020092 JP2021020092W WO2022014174A1 WO 2022014174 A1 WO2022014174 A1 WO 2022014174A1 JP 2021020092 W JP2021020092 W JP 2021020092W WO 2022014174 A1 WO2022014174 A1 WO 2022014174A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- remote control
- moving body
- moving
- mobile
- mobile body
- Prior art date
Links
- 230000010365 information processing Effects 0.000 title claims abstract description 44
- 238000003672 processing method Methods 0.000 title claims abstract description 33
- 238000000034 method Methods 0.000 claims abstract description 7
- 230000005856 abnormality Effects 0.000 claims description 7
- 230000008569 process Effects 0.000 abstract description 3
- 238000012544 monitoring process Methods 0.000 description 17
- 230000006870 function Effects 0.000 description 11
- 238000010586 diagram Methods 0.000 description 10
- 238000010801 machine learning Methods 0.000 description 7
- 238000012549 training Methods 0.000 description 6
- 238000004891 communication Methods 0.000 description 4
- 230000008859 change Effects 0.000 description 3
- 238000004590 computer program Methods 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000001684 chronic effect Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000007619 statistical method Methods 0.000 description 1
Images





Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/0011—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot associated with a remote control arrangement
- G05D1/0027—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot associated with a remote control arrangement involving a plurality of vehicles, e.g. fleet or convoy travelling
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/0055—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot with safety arrangements
- G05D1/0061—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot with safety arrangements for transition from automatic pilot to manual pilot and vice versa
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0214—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory in accordance with safety or protection criteria, e.g. avoiding hazardous areas
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
Definitions
- This disclosure relates to information processing methods and information processing systems.
- Patent Document 1 discloses a device for remotely controlling a vehicle capable of autonomous driving without a driver by an operator at a remote location. As a result, when such a vehicle cannot travel at its own discretion, an operator at a remote location can remotely control the vehicle to drive the vehicle.
- the present disclosure provides an information processing method and the like that can reduce the burden on an operator who remotely controls a plurality of autonomously movable objects at the same point at the same time zone.
- the information processing method is an information processing method executed by a computer, and acquires a remote control point which is a point where remote control of a mobile body capable of autonomous movement and remote control for movement is performed. Then, based on the position of at least one moving body, a plurality of moving bodies passing through the remote control point at the same time zone are specified, and the first moving body to be remotely controlled from among the specified plurality of moving bodies, And a second moving body to follow the first moving body is determined, and the operator is presented to remotely control the first moving body at the remote control point, while the first moving body is remotely controlled. Instructs the second moving body to follow the first moving body.
- a recording medium such as a system, method, integrated circuit, computer program or computer-readable CD-ROM, and the system, method, integrated circuit, computer program. And may be realized by any combination of recording media.
- the information processing method or the like it is possible to reduce the burden on the operator who remotely controls a plurality of autonomously movable objects at the same point at the same time zone.
- FIG. 1 is an image diagram showing an entire system including a remote control system, a remote control system, and a mobile body according to an embodiment.
- FIG. 2 is a block diagram showing an example of a remote control system according to an embodiment.
- FIG. 3 is a diagram showing an example of followable mobile object information.
- FIG. 4 is a flowchart showing an example of the information processing method according to the embodiment.
- FIG. 5 is a flowchart showing an example of the operation of the remote control system in use case 1.
- FIG. 6 is a diagram for explaining the timing for starting the follow-up running.
- FIG. 7 is a sequence diagram showing an example of the operation of the entire system in use case 2.
- FIG. 8 is a flowchart showing an example of the operation of the remote control system in the use case 2.
- the information processing method is an information processing method executed by a computer, which is a point where remote control of a mobile body capable of autonomous movement and remote control for movement is performed.
- a first that acquires a point identifies a plurality of mobiles that pass through the remote control point at the same time based on the position of at least one mobile, and remotely controls from the specified plurality of mobiles.
- a mobile body and a second mobile body that follows the first mobile body are determined, and the operator is presented to remotely control the first mobile body at the remote control point, and the first mobile body is remotely controlled. While instructing the second mobile body to follow the first mobile body.
- the second mobile body since the second mobile body follows the first mobile body to be remotely controlled and moves, the operator can remotely control the presented first mobile body and the remote control point at the same time zone. Multiple moving objects passing through can be moved together at a remote control point. Therefore, it is possible to reduce the burden on the operator who remotely controls a plurality of autonomously movable objects at the same point at the same time zone.
- the movement plan of the at least one moving body may be acquired, and the plurality of moving bodies may be specified based on the position and the movement plan of the at least one moving body.
- the remote control point is known in advance, it is possible to specify whether or not the mobile body passes through the remote control point from the position of the moving body and the movement plan, and if the moving body passes through the remote control point. It is possible to specify the time zone when passing through the remote control point. Therefore, it is possible to identify a plurality of moving objects that are predicted to pass the remote control point at the same time zone.
- the positions and movement plans of the plurality of moving bodies are acquired, and the plurality of moving bodies are obtained based on the positions and movement plans of the plurality of moving bodies.
- the moving body that reaches the remote control point earliest may be determined as the first moving body, and the other moving body may be determined as the second moving body.
- the mover that is presumed to reach the remote control point earliest among the multiple movers is located in front of the other movers that are presumed to reach the remote control point later than the mover at the remote control point. It is easy to become. Therefore, the second movement is performed by determining the moving body that is presumed to reach the remote control point earliest among the plurality of moving bodies as the first moving body and determining the other moving body as the second moving body. It is possible to smoothly switch to the mode in which the operator remotely controls the first moving body while making the body follow the first moving body. In other words, it is not necessary to change the order of the first moving body and the second moving body in the traveling direction.
- the aptitude of the moving body regarding the remote control or follow-up of the plurality of moving bodies is acquired, and based on the aptitude, the remote control is performed from the plurality of moving bodies.
- a moving body suitable for the above is determined as the first moving body, another moving body is determined as the second moving body, or a moving body suitable for following from the plurality of moving bodies is used as the second moving body. It is determined and another moving body is determined as the first moving body, or a moving body unsuitable for remote control from the plurality of moving bodies is determined as the second moving body, and the other moving body is the first moving body. It may be determined as one moving body, or a moving body unsuitable for following may be determined as the first moving body from the plurality of moving bodies, and another moving body may be determined as the second moving body.
- the moving body suitable for remote control or the moving body not suitable for following may be determined as the first moving body, and the moving body suitable for following or the moving body not suitable for remote control may be determined as the second moving body. It may be decided to be a mobile body. Thereby, the efficiency of remote control can be improved or the decrease in efficiency can be suppressed.
- the second mobile body follows the first mobile body at the start time of remote control.
- the second moving body does not follow the first moving body, at least one of the first moving body and the second moving body is moved so that the second moving body follows the first moving body. You may instruct.
- the second mobile body may not follow the first mobile body at the start of remote control. Therefore, if it is determined that the second moving body does not follow the first moving body at the start of remote control, the first moving body and the second moving body so that the second moving body follows the first moving body.
- the second mobile body can be followed by the first mobile body at the start of remote control. Therefore, at the start of remote control, it is possible to smoothly switch to the mode in which the operator remotely controls the first moving body while making the second moving body follow the first moving body.
- At least one constraint of the movement time, the stop time, the movement speed, and the movement range is acquired, and according to the at least one constraint, the first moving body and the second moving body are used. You may instruct at least one move.
- the remote control point is a point where a moving body requesting remote control is located, and in specifying the plurality of moving bodies, the position of the moving body requesting remote control is set as the position of at least one moving body.
- the plurality of moving bodies may be specified based on the positions of the moving bodies around the moving body.
- the position of the moving object requesting remote control can be the remote control point.
- the moving body requesting remote control and the moving body around the moving body are set in the same time zone. It can be identified as multiple moving objects that are expected to pass through a remote control point.
- the mobile body that requires remote control at the remote control point may be determined as the second mobile body.
- whether or not the moving object requires remote control at the remote control point is determined by the control characteristics of whether or not autonomous movement and remote control are possible, the history of remote control, and whether or not the occupant of the moving object requests manual control. Or, it can be inferred based on the management attribute of whether or not it is a mobile object to be managed.
- the second mobile may be determined based on at least one constraint of.
- the second moving body is a moving body whose suitability for following is suitable for following, or a moving body that satisfies at least one of the restrictions of the moving time, the stop time, the moving speed, and the moving range. Can be determined as. Alternatively, the second mobile can be determined if the operator's skill or experience for remote control with follow-up of the mobile is sufficient.
- the second moving body is used. It may be determined to perform remote control of the first mobile with follow-up.
- the operator in the remote control of the first mobile body accompanied by the follow-up of the second mobile body, the operator often carefully performs the remote control because the remote control is accompanied by the follow-up of the second mobile body, so that there are a plurality of mobile bodies.
- the movement speed of is slowed down as a whole and becomes inefficient.
- the operator when the load of the operator on the remote control is less than the threshold value or the surplus force is more than the threshold value, the operator has a margin, so that the remote control of the first mobile body accompanied by the follow-up of the second mobile body should be executed. It is possible to remotely control each of a plurality of moving objects without having to move the plurality of moving objects efficiently.
- the factor of remote control is an abnormality in the moving body that affects the movement
- the remote control of the first moving body accompanied by the follow-up of the second moving body is performed, there is a possibility that a safety problem may occur. Therefore, when the factor of remote control is not an abnormality in the moving body that affects the movement, the remote control of the first moving body accompanied by the follow-up of the second moving body is executed, so that the safety can be ensured.
- the operator may allow the remote control of the first moving body.
- the sensing data of the sensor in the second mobile body is acquired from the second mobile body, and the sensing is performed.
- the data may be presented to the operator.
- the operator follows the second moving body while checking the sensing data of the second moving body following the first moving body (in other words, checking the situation around the second moving body). It is possible to remotely control the first mobile body with the above. Therefore, it is possible to ensure the safety of the second mobile body that is not directly remotely controlled following the first mobile body that is remotely controlled.
- the operator is further provided with an operation interface for controlling a sensor in the second mobile body during remote control of the first mobile body accompanied by the follow-up of the second mobile body. 2
- the control of the sensor may be further instructed based on the operation in the operation interface.
- the operator controls the sensor in the second moving body, and confirms the situation of the desired region in the periphery of the second moving body, and the operator follows the second moving body in the first moving body.
- the first moving body is further controlled.
- the operator may be presented with the remote control of the first mobile body and the movement locus of the second mobile body estimated based on at least the movement characteristics of the second mobile body.
- the moving locus of the second moving body following the first moving body is the movement locus of the first moving body to be remotely controlled. May be different.
- the size of the second moving body is larger than the size of the first moving body, even if the first moving body moves so as not to collide with an obstacle or the like when the first moving body is remotely controlled, the first is The second moving body following the first moving body may collide with an obstacle or the like. Therefore, by presenting the estimated movement locus of the second mobile body to the operator, the operator can remotely control the first mobile body in consideration of the movement locus of the second mobile body, and the second movement. You can ensure the safety of your body.
- the first moving body is to be followed until the remote control of the first moving body accompanied by the following of the second moving body is completed. 2 You may instruct the moving body.
- the second moving body following the first moving body is also the same as the first moving body. This is because it is difficult to move autonomously. Therefore, it is possible to prevent the second moving body from being released from following the first moving body before the remote control of the first moving body is completed, and it is possible to ensure the safety of the second moving body.
- the remote control of the first mobile body accompanied by the follow-up of the second mobile body it is based on the remote control point, the position of the first mobile body, and the position of the second mobile body.
- the operator may be presented with the relationship between the end point of the remote control and the position of the second moving body.
- the operator can end the remote control of the first mobile after confirming that the second mobile has passed the end point of the remote control. Therefore, it is possible to prevent the second moving body from being unfollowed by the first moving body before the second moving body passes the end point of the remote control, and the safety of the second moving body can be ensured. Can be done.
- the information processing system includes an acquisition unit that acquires a remote control point, which is a point at which remote control of a mobile body capable of autonomous movement and remote control for movement is performed, and at least one movement.
- a specific unit that identifies a plurality of mobile bodies that pass through the remote control point at the same time based on the position of the body, a first mobile body that is remotely controlled from the specified plurality of mobile bodies, and the above.
- a determination unit that determines a second mobile body that follows the first mobile body, a presentation unit that presents the operator to remotely control the first mobile body at the remote control point, and a remote control unit that the first mobile body controls.
- the second moving body is provided with an instruction unit for instructing the second moving body to follow the first moving body.
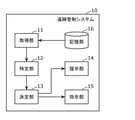
- FIG. 1 is an image diagram showing an entire system including a remote control system 10, a remote control system 20, and a mobile body 50 according to an embodiment.
- the mobile body 50 is a mobile body that can perform autonomous movement and remote control for movement.
- the moving body 50 will be described as an autonomous driving vehicle, but the moving body 50 may be an unmanned aerial vehicle or the like.
- a plurality of mobile bodies 50 are traveling on a road or the like, and the plurality of mobile bodies 50 communicate with each other by vehicle-to-vehicle communication, and also communicate with a remote control system 10 and a remote control system 20 by wireless communication.
- the moving body 50 includes a camera or a sensor such as LiDAR (Light Detection And Ringing), and can transmit sensing data to the remote control system 10 and the remote control system 20.
- LiDAR Light Detection And Ringing
- the mobile body 50 has a function of switching an operation mode (autonomous automatic mode, remote control mode, etc.) in response to an instruction from the remote control system 10. Further, the mobile body 50 may have a function of requesting remote control from the remote control system 10 when an event (details will be described later) occurs.
- an operation mode autonomous automatic mode, remote control mode, etc.
- the mobile body 50 may have a function of requesting remote control from the remote control system 10 when an event (details will be described later) occurs.
- the remote control system 10 is a system that monitors the mobile body 50 in order to remotely control the mobile body 50 and gives an instruction to the remote control system 20 to remotely control the mobile body 50.
- the remote control system 10 is an example of an information processing system. Details of the remote control system 10 will be described later.
- the remote control system 20 is a system for remotely controlling the moving body 50, and the operator remotely controls the moving body 50 via the remote control system 20.
- the remote control system 20 displays an image of the surroundings of the mobile body 50 or a sensing result such as LiDAR based on the sensing data of the control unit (for example, a handle) for remotely controlling the mobile body 50 and the sensor of the mobile body 50.
- a display unit or the like is provided, and the operator can remotely control the moving body 50 by operating the control unit while looking at the display unit.
- the remote control system 10 and the remote control system 20 may be provided in the same facility, and the remote control system 10 and the remote control system 20 are integrated (for example, the remote control system 10 is equipped with the remote control system 20). It may be included).
- FIG. 2 is a block diagram showing an example of the remote control system 10 according to the embodiment.
- the remote control system 10 includes an acquisition unit 11, a specific unit 12, a determination unit 13, a presentation unit 14, an instruction unit 15, and a storage unit 16.
- the remote control system 10 is a computer including a processor, a memory, and the like.
- the memory is a ROM (Read Only Memory), a RAM (Random Access Memory), or the like, and can store a program executed by the processor.
- the acquisition unit 11, the specific unit 12, the determination unit 13, the presentation unit 14, and the instruction unit 15 are realized by a processor or the like that executes a program stored in the memory.
- the memory for storing the program may be the storage unit 16 or may be a memory different from the storage unit 16.
- the components constituting the remote control system 10 may be realized by a server. Further, the components constituting the remote control system 10 may be distributed and arranged on a plurality of servers. Further, for example, at least a part of the components constituting the remote control system 10 may be realized by a device mounted on the mobile body 50 (for example, a first mobile body described later).
- the acquisition unit 11 acquires a remote control point, which is a point where remote control of a mobile body capable of autonomous movement and remote control for movement is performed.
- the specifying unit 12 identifies a plurality of moving bodies 50 that pass through the remote control point in the same time zone based on the positions of at least one moving body 50.
- the determination unit 13 determines a first mobile body to be remotely controlled and a second mobile body that follows the first mobile body from among the plurality of specified mobile bodies 50.
- the presentation unit 14 presents the operator to remotely control the first moving object at the remote control point.
- the instruction unit 15 instructs the second moving body to follow the first moving body while the first moving body is remotely controlled.
- the position information indicating the position of each moving object 50 managed by the remote control system 10 the movement plan information indicating the departure place, the destination, the movement route, etc., the movement time, the stop time, etc.
- Constraint information indicating restrictions such as movement speed and movement range, control characteristic information indicating control characteristics indicating whether autonomous movement and remote control are possible, tracking indicating suitability for tracking a moving body that can be followed or a moving body that can be followed Possible mobile body information, remote controllable mobile body information indicating the suitability for remote control of a remote controllable mobile body, vehicle type, vehicle size, number of sensors mounted, sensor type, mobile body information indicating sensor mounting position, etc.
- History information indicating a history of remote control, remote control point information indicating a previously known remote control point, and the like are managed, and these information are stored in the storage unit 16. It should be noted that these information may be stored in an external system, and the remote control system 10 may acquire these information from the external system.
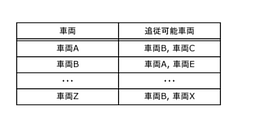
- FIG. 3 is a diagram showing an example of followable mobile body information.
- the followable moving body information may be information indicating a moving body 50 that can be followed for each moving body 50, and as shown in FIG. 3, the vehicle A can follow the vehicles B and C. , The vehicle B can follow the vehicles A and E, the vehicle Z can follow the vehicles B and X, and so on, the moving body 50 that can follow each moving body 50 may be managed.
- the followable moving body information may be information indicating the moving body 50 to be followed for each moving body 50, the vehicle A is followed by the vehicles B and C, and the vehicle B is the vehicle A and A moving body 50 that is followed by each moving body 50 may be managed, such that the vehicle Z is followed by E and the vehicle Z is followed by vehicles B and X.
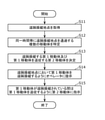
- FIG. 4 is a flowchart showing an example of the information processing method according to the embodiment.
- the information processing method is a method executed by a computer (remote control system 10). Therefore, FIG. 4 is also a flowchart showing an example of the operation of the remote control system 10 according to the embodiment. That is, the following description is both a description of the operation of the remote control system 10 and a description of the information processing method.
- the acquisition unit 11 acquires the remote control point (step S11).
- the acquisition unit 11 may acquire a remote control point known in advance from the storage unit 16, or may remotely control the point where the mobile body 50 that requests remote control when an event occurs in the mobile body 50 is located. It may be acquired as a point (that is, a remote control point that is unknown in advance).
- the remote control point is a point where remote control of the mobile body 50 is required, in other words, a point where a predetermined event occurs at the point where the mobile body 50 requires remote control.
- the predetermined event is an event in which the moving body 50 is stuck or the moving body 50 cannot continue autonomous movement at the discretion of the moving body 50 itself.
- the remote control point known in advance is, for example, a point where remote control has occurred in the past and then repeated remote control has occurred.
- the remote control points that are known in advance are the points around the confluence to the road with heavy traffic, the points around the place where people are controlling traffic during road construction, and the points around the pedestrian crossing with a lot of traffic. Or, it is a point around a place where there is a chronic road parked vehicle.
- a remote control point known in advance may be stored in the storage unit 16 or the like at the discretion of the administrator of the remote control system 10.
- the remote control point that is unknown in advance is, for example, a point where remote control has never occurred in the past and remote control occurs for the first time upon request from the mobile body 50.
- the remote control point that is unknown in advance is a point where there is a sudden road parked vehicle and remote control temporarily occurs.
- use case 1 a case of acquiring a remote control point known in advance will be described as use case 1, and a case of acquiring a point where a mobile body 50 requesting remote control is located as a remote control point will be described as use case 2.
- the specifying unit 12 identifies a plurality of moving bodies 50 passing through the remote control point in the same time zone based on the positions of at least one moving body 50 (step S12).
- the specific unit 12 operates at least one mobile body 50 (for example, all mobile bodies 50, a plurality of mobile bodies 50 in a specific area, or one designated mobile body 50.
- the specific unit 12 operates at least one mobile body 50 (for example, all mobile bodies 50, a plurality of mobile bodies 50 in a specific area, or one designated mobile body 50.
- collectively operated. Acquire the movement plan of the mobile body 50), and identify a plurality of mobile bodies 50 that are predicted to pass the remote control point at the same time zone based on the position and movement plan of at least one operational mobile body 50. do.
- the remote control point is known in advance, it is possible to specify whether or not the mobile body 50 passes through the remote control point from the position of the moving body 50 and the movement plan, and the moving body 50 passes through the remote control point.
- the time zone for passing the remote control point can be specified. Therefore, it is possible to identify a plurality of moving objects 50 that are predicted to pass the remote control point in the same time zone.
- the specific unit 12 is located at the position of the mobile body 50 requesting remote control and the position of the mobile body 50 around the mobile body 50 requesting remote control as the position of at least one operational mobile body 50. Based on this, a plurality of mobile bodies 50 that are expected to pass the remote control point at the same time zone are specified. For example, if the remote control point is not known in advance, the position of the moving body 50 requesting remote control may be the remote control point.
- the moving body 50 requesting remote control and the movement requesting remote control can be specified as a plurality of moving bodies 50 that are predicted to pass the remote control point at the same time zone.
- the moving body 50 around the moving body 50 requesting remote control may be the moving body 50 within the imaging range of the sensor mounted on the moving body 50 requesting remote control, or remote control may be performed.
- the mobile body 50 may be located within a predetermined range from the position of the requested mobile body 50.
- the specific unit 12 may have the following functions.
- the specific unit 12 may generate a plurality of sets of a plurality of mobile bodies 50 passing through the remote control point in the same time zone. This is because if the number of the second moving bodies to be followed by one first moving body is large, it becomes difficult to remotely control the first moving body accompanied by the following of the second moving body.
- the determination unit 13 determines a first mobile body to be remotely controlled and a second mobile body to follow the first mobile body from the specified plurality of mobile bodies 50 (step S13).
- the determination unit 13 acquires the positions and movement plans of the specified plurality of moving bodies 50, and is out of the plurality of moving bodies 50 based on the positions and movement plans of the plurality of moving bodies 50.
- the moving body that reaches the remote control point earliest may be determined as the first moving body, and the other moving body may be determined as the second moving body.
- the moving body 50 estimated to reach the remote control point earliest is the other moving body 50 estimated to reach the remote control point later than the moving body 50 at the remote control point. It tends to be located in front. Therefore, the moving body 50 estimated to reach the remote control point earliest among the plurality of moving bodies 50 is determined as the first moving body, and the other moving body 50 is determined as the second moving body. It is possible to smoothly switch to the mode in which the operator remotely controls the first moving body while making the second moving body follow the first moving body. In other words, it is not necessary to change the order of the first moving body and the second moving body in the traveling direction.
- the determination unit 13 may acquire the suitability of the specified mobile body 50 for remote control or follow-up.
- the determination unit 13 determines the mobile body 50 suitable for remote control from the plurality of mobile bodies 50 as the first mobile body, and determines the other mobile body 50 as the second mobile body based on the suitability for remote control. May be good.
- the determination unit 13 determines the moving body 50 suitable for following from the plurality of moving bodies 50 as the second moving body, and determines the other moving body 50 as the first moving body based on the suitability for following. May be good.
- the determination unit 13 determines the moving body 50 unsuitable for remote control from the plurality of moving bodies 50 as the second moving body, and the other moving body 50 as the first moving body, based on the suitability for remote control. You may decide. Further, the determination unit 13 determines the moving body 50 that is not suitable for following from the plurality of moving bodies 50 as the first moving body, and determines the other moving bodies 50 as the second moving body, based on the suitability for following. You may. In this way, the moving body 50 suitable for remote control or the moving body 50 not suitable for following may be determined as the first moving body, or the moving body 50 suitable for following or the moving body not suitable for remote control may be determined. 50 may be determined as the second mobile body. Thereby, the efficiency of remote control can be improved or the decrease in efficiency can be suppressed.
- the suitability of a moving body with respect to remote control or tracking of the plurality of moving bodies 50 may be relatively determined among the plurality of moving bodies 50.
- the mobile body 50 suitable for remote control may be a mobile body having high performance of mounted sensors (for example, a wide sensing range) or a large number of mounted sensors. Basically, this is because remote control is performed based on the sensing information of the first mobile body.
- the moving body 50 suitable for remote control may be a moving body that the operator is accustomed to using remote control.
- the moving body 50 suitable for remote control may be a moving body having a size larger than that of other moving bodies 50. This is because the subsequent second moving body simply follows the same path as the first moving body, and the operator can steer without being aware of the path of the second moving body.
- the moving body 50 that is not suitable for remote control may be a moving body in which the sensor is out of order or the sensor is dirty. By combining these elements, it may be comprehensively determined whether or not the mobile body 50 is suitable for remote control.
- the specified plurality of moving bodies 50 may be presented to the operator, and the operator may be made to select the first moving body and the second moving body from the plurality of moving bodies 50.
- information about remote control of the specified plurality of mobiles 50 may be presented.
- Information on remote control includes, for example, (1) the distance from the remote control point to the moving body 50 or the estimated time of arrival at the remote control point, (2) the suitability of the moving body for remote control or follow-up, (3) autonomous movement and Based on the control characteristics of whether or not remote control is possible, the history of remote control, whether or not there is a request for manual control by the occupants of the moving object, or the management attributes of whether or not the moving object 50 is the management target of the remote control system 10. be.
- the selection conditions of the first moving body and the second moving body by the operator may be registered in advance, and the moving body 50 that matches the selection conditions is automatically determined as the first moving body or the second moving body. May be good.
- the determination unit 13 determines the mobile body 50 requesting remote control as the first mobile body, and requests the mobile body 50 around the mobile body 50 requesting remote control (for example, requesting remote control).
- the moving body 50) following the moving body 50 may be determined as the second moving body.
- the moving body 50 around the moving body 50 requesting remote control is smoothly switched to the mode in which the operator remotely controls the moving body 50 requesting remote control while following the moving body 50 requesting remote control. be able to.
- the determination unit 13 may have the following functions.
- the determination unit 13 may determine the mobile body 50 that requests (presumes to require) remote control at the remote control point as the second mobile body. In this way, by determining the moving body 50 that is presumed to require remote control at the remote control point as the second moving body, the moving body 50 is made to follow the first moving body and indirectly controlled remotely. can do. In other words, the moving body 50, which is presumed not to require remote control at the remote control point, is unlikely to require remote control at the remote control point, so it must be determined as the second moving body that follows the first moving body. May be good. That is, the burden on the operator can be reduced by continuing the autonomous movement of the moving body 50, which is not presumed to require remote control.
- the determination unit 13 determines the control characteristics of whether autonomous movement and remote control are possible, the history of remote control, the presence or absence of a request for manual control by the occupants of the mobile body, or the mobile body 50 to be managed by the remote control system 10. Based on the management attribute of whether or not, the moving body 50 presumed to require remote control at the remote control point may be determined as the second moving body.
- the determination unit 13 may determine at least the mobile body 50 capable of autonomous movement and remote control as the second mobile body.
- the determination unit 13 estimates that the mobile body 50 that cannot be autonomously moved and remotely controlled is a mobile body 50 that is unlikely to request remote control at the remote control point, and determines the mobile body 50. It does not have to be determined as the second mobile body.
- the mobile body 50 capable of autonomous movement and remote control is, for example, a mobile body that does not have both autonomous movement and remote control functions, or these functions do not function effectively due to a failure or the like.
- the determination unit 13 estimates that the mobile body 50 having at least a history of remote control is a mobile body 50 that can request remote control at the remote control point, and uses the mobile body 50 as the second mobile body. May be determined as. In other words, the determination unit 13 estimates that the mobile body 50 having no history of remote control is a mobile body 50 that is unlikely to request remote control at the remote control point, and determines that the mobile body 50 is the second. It does not have to be determined as a mobile body.
- the history of remote control is a history of traveling by remote control at the target remote control point this time, or traveling following the first moving object.
- the history of remote control means that another mobile body 50 of the same type or a similar type is remotely controlled and traveled at the target remote control point this time, or travels following the first mobile object. It is a history that it was done.
- the history of remote control can be determined on a map of another remote control point similar to the environment of the remote control point targeted this time (for example, a confluence point, etc.) instead of the remote control point targeted this time. ) May be the history.
- the determination unit 13 estimates that the mobile body 50 that does not require manual control by the occupant of the mobile body 50 is a mobile body 50 that can request remote control at the remote control point, and the mobile body 50. May be determined as the second mobile body.
- the determination unit 13 estimates that the mobile body 50 for which the occupant of the mobile body 50 is requested to be manually controlled is a mobile body 50 that is unlikely to request remote control at the remote control point, and the movement is said to be the same. It is not necessary to determine the body 50 as the second mobile body.
- the traveling mode of each moving body 50 is managed by the remote control system 10
- the moving body 50 is capable of switching between the automatic operation mode and the manual operation mode, and is a moving body traveling in the automatic operation mode.
- Reference numeral 50 may be regarded as a mobile body requiring remote control
- the moving body 50 traveling in the manual operation mode may be regarded as a moving body not requiring remote control.
- the determination unit 13 estimates that at least the mobile body 50 to be managed by the remote control system 10 is a mobile body 50 that can request remote control at the remote control point, and moves the mobile body 50 to the second position. It may be decided as a body. In other words, since the mobile body 50 that is not the management target of the remote control system 10 is a mobile body that does not require remote control from the remote control system 10, the determination unit 13 uses the mobile body 50 as the second mobile body. You don't have to decide.
- the width or the remaining distance of the estimated time of arrival used by the specific unit 12 in the process of specifying the plurality of moving bodies 50 may be a value set by the operator. Further, the width or the remaining distance of the estimated time of arrival may vary depending on the distance from the remote control point to the moving body 50. For example, when the distance from the remote control point to the moving object 50 is 10 km, the width of the estimated arrival time is 45 seconds, and when the distance from the remote control point to the moving body 50 is 1 km, the width of the estimated arrival time is 15. The range of estimated time of arrival varies, such as seconds. Further, the remaining distance may vary as in the width of the estimated time of arrival. Further, the value of the above variation may be set by the operator.
- At least one of the first mobile body or the second mobile body selected from the specified plurality of mobile bodies 50 based on the selection conditions as described above may be presented to the operator. Further, the operator may be inquired as to whether or not to approve at least one of the presented first and second mobiles, and if approved, the first and second mobiles may be determined.
- the identification of a plurality of moving objects by the specific unit 12 may be executed by the machine learning model.
- the machine learning model is trained using the remote control point and the relationship data showing the relationship between the remote control point and the operation moving body 50 as training data, and using a plurality of moving bodies 50 specified by the operator as correct answer data.
- the relevant data is, for example, the distance from the remote control point to the moving body 50 or the estimated time of arrival at the remote control point.
- data such as the operator, the position of the moving body 50 (or the type of the area to which the position belongs), the vehicle type of the moving body 50, and the time zone may be used as training data for training the machine learning model. good.
- the determination of the first moving body and the second moving body by the determination unit 13 may be executed by the machine learning model.
- a machine learning model is trained using information on remote control of a plurality of moving bodies 50 specified by the specific unit 12 as training data and using the first moving body and the second moving body selected by the operator as correct answer data.
- Information on remote control includes, for example, (1) the distance from the remote control point to the moving object 50 or the estimated time of arrival at the remote control point, (2) the suitability of the moving object for remote control or follow-up, and (3) autonomous movement and remote control.
- the specific unit 12 identifies a plurality of moving objects and the determining unit 13 determines the first and second mobile objects based on a statistical method using past history. May be executed.
- whether or not the mobile body 50 requests remote control at the remote control point is determined by the control characteristics of whether or not autonomous movement and remote control are possible, the history of remote control, and the request for manual control by the occupants of the moving body. It can be estimated based on the management attribute of the presence / absence or whether or not the mobile body is the management target 50.
- the determination unit 13 may have at least one of the suitability of the moving body for tracking, the skill or experience of the operator for remote control with the following of the moving body 50, or the movement time, stop time, movement speed, and movement range.
- the second mobile may be determined based on one constraint.
- the determination unit 13 may determine the moving body 50 whose suitability for the moving body regarding tracking satisfies a predetermined condition as the second moving body.
- the determination unit 13 has a moving body 50 having a function of following the other moving body 50, and a moving body 50 having a size capable of following the other moving body 50 (for example,).
- a moving body 50) smaller than the first moving body, or a moving body 50 having a sensor whose position or sensing range can follow the other moving body 50 is determined as the second moving body. May be good.
- the predetermined conditions may be different depending on the current position of the moving body 50. This is because the suitability of the required moving object differs depending on the location where infrastructure can be coordinated or the width of the road.
- the determination unit 13 does not have to determine the second mobile body when the operator's skill or experience for remote control accompanied by the follow-up of the mobile body 50 is insufficient. That is, it is not necessary for the operator to remotely control the first moving body accompanied by the follow-up of the second moving body. Remote control of the moving body 50 with the follow-up of the other moving body 50 is more difficult than remote control of the moving body 50 without the follow-up of the other moving body 50. This is because if the operator's skill or experience is insufficient, safety problems may occur.
- the determination unit 13 may inquire of the operator whether the operator's skill or experience for remote control accompanied by the follow-up of the moving body 50 is sufficient.
- the determination unit 13 may determine the moving body 50 that satisfies at least one constraint of the moving time, the stopping time, the moving speed, and the moving range as the second moving body. For example, the determination unit 13 does not have to determine the moving body 50 (for example, a passenger vehicle carrying a passenger) that is providing the service as the second moving body.
- the mobile body 50 that is providing the service may be restricted by any one of, for example, a movement time, a stop time, a movement speed, and a movement range, and such a movement body 50 is a second moving body. This is because the constraint may not be met if it is determined to be.
- the determination unit 13 may determine the moving body 50 that satisfies at least one constraint of the moving time, the stopping time, the moving speed, and the moving range as the first moving body.
- the moving body 50 whose suitability for following is suitable for following, or the moving body 50 which satisfies at least one of the restrictions of the moving time, the stop time, the moving speed, and the moving range is the second. It can be determined as a mobile body.
- the second mobile can be determined if the operator has sufficient skill or experience for remote control with the follow-up of the mobile 50. In other words, if the operator has sufficient skill or experience for remote control with the follow-up of the moving body 50, it is not necessary to determine the second moving body.
- the presentation unit 14 presents the operator to remotely control the first moving object at the remote control point (step S14).
- the presentation unit 14 may have the following functions.
- the presentation unit 14 is when the load of the remote control system 10 (for example, the operator) for remote control is equal to or more than the threshold value or the remaining power is less than the threshold value, or when the factor of remote control is not an abnormality in the moving body 50 which affects the movement. , It may be determined to perform remote control of the first moving body with the follow-up of the second moving body, and the operator may be presented to remotely control the first moving body at the remote control point.
- the load of the remote control system 10 is the number or ratio of operators or remote control devices required for remote control, and the surplus power of the remote control system 10 is the operator or remote control device capable of immediately responding to remote control. A number or percentage.
- the operator in the remote control of the first mobile body accompanied by the follow-up of the second mobile body, the operator often carefully performs the remote control because the remote control is accompanied by the follow-up of the second mobile body, so that there are a plurality of mobile bodies.
- the movement speed of 50 becomes slow as a whole and becomes inefficient.
- the load of the operator on the remote control is less than the threshold value or the surplus force is more than the threshold value, the operator has a margin, so that the remote control of the first mobile body accompanied by the follow-up of the second mobile body should be executed. It is possible to remotely control each of the plurality of moving bodies 50 without having to move the plurality of moving bodies 50 efficiently.
- the factor of remote control is an abnormality in the moving body 50 that affects the movement (for example, a sensor failure, dirt adhered to the sensor, etc.)
- the moving body 50 other than the moving body 50 in which the abnormality occurred is remote. Since no maneuvering is required, remote maneuvering of the first moving body accompanied by following the second moving body becomes unnecessary.
- the presentation unit 14 may allow the operator to remotely control the first mobile body after instructing the follow-up to the second mobile body.
- the remote control of the first moving body may not be started until the preparation for following the second moving body is completed (for example, the movement to the following position is completed), and the presentation unit 14 may be used for the second moving body.
- the operator may be presented to allow remote control. As a result, it is possible to prevent the remote control of the first mobile body from being started before the preparation for the second mobile body to follow the first mobile body is completed.
- whether or not the preparation for following the second moving body is completed depends on whether or not the vehicle-to-vehicle communication has been established, and whether or not the adjustment of the position and orientation of the second moving body with respect to the first moving body has been completed.
- it may be determined depending on whether or not the adjustment of the position of the sensor of the first moving body or the second moving body for the follow-up operation of the remote control is completed.
- the remote control may be permitted after the operator confirms the positions of the sensors of the first moving body and the second moving body before starting the remote control.
- the presentation unit 14 acquires the sensing data (or its processing data) of the sensor in the second mobile body from the second mobile body and senses it during the remote control of the first mobile body accompanied by the follow-up of the second mobile body.
- the data may be presented to the operator.
- the operator accompanies the follow-up of the second moving body while checking the sensing data of the second moving body following the first moving body (in other words, checking the situation around the second moving body).
- Remote control of the first mobile body can be performed. Therefore, it is possible to ensure the safety of the second mobile body that is not directly remotely controlled following the first mobile body that is remotely controlled.
- the presentation unit 14 may provide the operator with an operation interface for controlling a sensor in the second mobile body during remote control of the first mobile body accompanied by the follow-up of the second mobile body.
- the operator controls the sensor in the second mobile body to remotely control the first mobile body with the follow-up of the second mobile body while checking the situation of the desired region in the periphery of the second mobile body. It can be performed. Therefore, it is possible to ensure the safety of the second mobile body that is not directly remotely controlled following the first mobile body that is remotely controlled.
- the control signal for controlling the sensor in the second mobile body may be directly transmitted from the remote control system 20 to the second mobile body, or may be transmitted from the remote control system 20 to the second mobile body via the first mobile body.
- the second moving body for following the first moving body may be controlled by the operator, it may be difficult for the second moving body to follow the first moving body. Therefore, the second movement Only sensors other than the relevant sensor on the body may be controlled by the operator.
- the sensor of the second moving body may be controlled by the operator after the range in which the tracking is possible (for example, the moving range and the range of the direction of the sensor of the second moving body) is limited.
- the remote control of the first moving body accompanied by the following of the second moving body is completed (that is, when the second moving body switches from the following mode to the automatic driving mode), the position and orientation of the sensor follow.
- the state in the automatic operation mode before the mode may be automatically returned.
- the presentation unit 14 makes a first movement by the operator during remote control of the first moving body accompanied by the follow-up of the second moving body.
- the operator may be presented with the movement locus of the second mobile, which is estimated based on the remote control of the body and at least the movement characteristics of the second mobile.
- the moving locus of the second moving body following the first moving body is the movement locus of the first moving body to be remotely controlled. May be different.
- the inferred movement locus of the second moving body is presented to the operator.
- the guide of the movement route is presented according to which of the first moving body and the second moving body has a larger vehicle body size (for example, the length of the vehicle).
- the presentation unit 14 ends the remote control based on the remote control point, the position of the first moving body, and the position of the second moving body during the remote control of the first moving body accompanied by the follow-up of the second moving body.
- the relationship between the point and the position of the second moving body may be presented to the operator. This allows the operator to end the remote control of the first mobile after confirming that the second mobile has passed the end point of the remote control. Therefore, it is possible to prevent the second moving body from being unfollowed by the first moving body before the second moving body passes the end point of the remote control, and the safety of the second moving body can be ensured. Can be done.
- the presentation unit 14 acquires the end point of the remote control based on the history, and the second moving body passes through the end point. You may instruct the operator to continue remote control of the first mobile until. For example, the operator may be informed when the second mobile has passed the end point. Further, for example, it may not be permitted to change the traveling mode of the first moving body from the remote control mode to the autonomous traveling mode until the second moving body passes the end point. Further, the presentation unit 14 may present a point at which switching from the remote control mode to the automatic movement mode is permitted. If there is no history, the operator may set a point for switching from the remote control mode to the automatic movement mode.
- the instruction unit 15 instructs the second moving body to follow the first moving body while the first moving body is remotely controlled (step S15).
- the remote control system 10 issues an instruction to the second moving body to switch from the autonomous running mode to the following running mode
- the second moving body starts the following running mode
- the operator switches the first moving body from the remote control mode.
- the second moving body is switched from the follow-up running mode to the autonomous running mode at the timing when the instruction to switch to the autonomous running mode is issued.
- the second mobile body follows the first mobile body to be remotely controlled, so that the operator can pass the remote control point at the same time by simply remotely controlling the presented first mobile body. It is possible to move a plurality of moving bodies 50 together at a remote control point. Therefore, it is possible to reduce the burden on the operator who remotely controls a plurality of mobile bodies 50 capable of autonomous movement at the same point in the same time zone.
- the instruction unit 15 determines whether or not the second mobile body follows the first mobile body at the start of remote control based on the positions of the first mobile body and the second mobile body and the movement plan. If the second moving body does not follow the first moving body, the movement of at least one of the first moving body and the second moving body is instructed so that the second moving body follows the first moving body. You may. For example, depending on the determined current positions of the first and second mobiles and the current movement plan, the second mobile may not follow the first mobile at the start of remote control. Therefore, when it is determined that the second moving body does not follow the first moving body at the start of remote control, the instruction unit 15 first moves so that the second moving body follows the first moving body.
- the second mobile body By instructing the movement of at least one of the body and the second mobile body, the second mobile body can be followed by the first mobile body at the start of remote control. Therefore, at the start of remote control, it is possible to smoothly switch to the mode in which the operator remotely controls the first moving body while making the second moving body follow the first moving body.
- the instruction unit 15 acquires at least one constraint of the movement time, the stop time, the movement speed, and the movement range, and according to the at least one constraint, at least one of the first moving body and the second moving body.
- You may instruct to move For example, depending on the moving body 50, there may be restrictions on the movable movement time and the stoptable stop time according to the movement plan of the moving body 50, or there may be restrictions on the maximum speed or the minimum speed of the moving body 50. There may be restrictions on the range of movement that the moving body 50 can move. Therefore, by instructing the movement according to these restrictions, it is possible to instruct the movement while observing these restrictions.
- the indicator unit 15 may have the following functions.
- the instruction unit 15 is provided with an operation interface for controlling a sensor in the second mobile body by the presentation unit 14 during remote control of the first mobile body accompanied by the follow-up of the second mobile body.
- the control of the sensor may be instructed based on the operation in the operation interface.
- the operator controls the sensor in the second mobile body to remotely control the first mobile body with the follow-up of the second mobile body while checking the situation of the desired region in the periphery of the second mobile body. It can be performed. Therefore, it is possible to ensure the safety of the second mobile body that is not directly remotely controlled following the first mobile body that is remotely controlled.
- the instruction unit 15 may instruct the second moving body to continue following the first moving body until the remote control of the first moving body accompanied by the following of the second moving body is completed. For example, if the tracking of the first moving body by the second moving body is canceled while the first moving body is remotely controlled by the operator, a safety problem may occur. In the situation where the first moving body is remotely controlled by the operator, it is difficult for the first moving body to move autonomously, and the second moving body following the first moving body is also the same as the first moving body. This is because it is difficult to move autonomously. Therefore, it is possible to prevent the second moving body from being released from following the first moving body before the remote control of the first moving body is completed, and it is possible to ensure the safety of the second moving body.
- the instruction unit 15 instructs the first mobile body to switch from the remote control mode to the automatic movement mode when the first mobile body passes the end point of the remote control, and the second mobile body is the end point.
- the second mobile body may be instructed to switch from the follow-up mode to the automatic movement mode when passing through.
- the automatic movement mode is automatically switched when the end point is passed, and the operator can save the trouble of switching the remote control mode to the automatic movement mode, which is a burden on the operator. Can be reduced. If only the first moving body has passed the end point and the second moving body has not passed the ending point, the operator is made to monitor the second moving body until the second moving body passes the ending point. You may.
- the instruction unit 15 may move on the same movement path as the first moving body. You may instruct the second moving body to continue to follow the first moving body.
- the instruction unit 15 can further follow the first moving body or the second moving body following the first moving body during the remote control of the first moving body accompanied by the following of the second moving body. If is detected, the new moving body 50 may be instructed to follow the running. In this case, the operator may temporarily suspend the remote control of the first moving body and make the first moving body stand by until the preparation for following the new moving body 50 is completed. Alternatively, the operator may be asked if a new mobile body 50 may be added as a second mobile body.
- FIG. 5 is a flowchart showing an example of the operation of the remote control system 10 in the use case 1.
- the acquisition unit 11 acquires vehicle position information, operation information, and remote control point information (step S21).
- the acquisition unit 11 acquires a remote control point known in advance, and among the plurality of mobile bodies 50 (hereinafter also referred to as vehicles) managed by the remote control system 10, a plurality of vehicles existing in the vicinity of the remote control point.
- the position of the vehicle is acquired, and the operation information (travel route, arrival time for each travel location, etc.) of the plurality of vehicles is acquired.
- the specifying unit 12 identifies a plurality of vehicles scheduled to pass through the remote control point (step S22), and calculates the estimated time of arrival at the remote control point for each specified vehicle (step S23).
- the specifying unit 12 can specify a plurality of vehicles scheduled to pass through the remote control point from the vehicle position information, the operation information, and the remote control point information, and can calculate the estimated time of arrival for each specified vehicle.
- the specifying unit 12 may specify a plurality of vehicles scheduled to pass through the remote control point from a plurality of vehicles having the same traveling direction.
- the specific unit 12 determines whether or not there are a plurality of vehicles arriving at the remote control point in the same time zone (step S24). For example, the specific unit 12 compares the estimated arrival times of a plurality of vehicles scheduled to pass through the remote control point, and determines whether or not there are a plurality of vehicles having the same estimated arrival time. It may be determined whether or not there are a plurality of vehicles arriving at the same time zone at the point.
- the range of estimated times of arrival that are considered to be the same may be increased as the time from the current time to the estimated time of arrival increases. This is because the larger the time from the current time to the estimated arrival time, the larger the difference between the actual arrival time and the estimated arrival time can be.
- the specific unit 12 compares the remaining distances from the current positions of the plurality of vehicles scheduled to pass through the remote control point to the remote control points, and determines whether or not there are a plurality of vehicles having the same remaining distance. By doing so, it may be determined whether or not there are a plurality of vehicles arriving at the remote control point in the same time zone.
- the range of remaining distances to be regarded as the same that is, the allowable deviation with respect to the remaining distances
- the specific unit 12 compares the travel route and the current position from the current position of each of the plurality of vehicles scheduled to pass through the remote control point to the remote control point, and the vehicle has the same travel route and the same current position. By determining whether or not there are a plurality of vehicles, it may be determined whether or not there are a plurality of vehicles arriving at the remote control point in the same time zone. In this case, the determination can be made without calculating the estimated time of arrival or the remaining distance. When comparing estimated time of arrival or when comparing the remaining distance, select a vehicle that arrives at the remote control point in the same time zone from among multiple vehicles with different current positions or travel routes. There is a merit that it can be done.
- remote control of the first mobile body accompanied by tracking of the second mobile body (hereinafter, also referred to as remote control with tracking) is not performed.
- the specific unit 12 determines a plurality of vehicles arriving at the remote control point in the same time zone as a group of followed-up remote control. (Step S25).
- the specific unit 12 may delay the arrival at the destination by a predetermined time or more due to the remote control with tracking, and for a vehicle (for example, a vehicle providing a service) that causes a problem, the remote control with tracking is performed. It does not have to be included in the piloting group.
- the vehicle may stop or decelerate and arrive at the destination may be delayed. For example, in the case of a passenger vehicle carrying passengers, the quality of service may deteriorate. Because there is.
- the determination unit 13 determines the vehicle with the earliest estimated arrival time in the determined group as the vehicle to be remotely controlled (step S26).
- the remote-controlled vehicle is an example of a first mobile body.
- the determination unit 13 may determine the vehicle whose current position is closest to the remote control point in the determined group as the remote control target vehicle. Alternatively, the determination unit 13 may determine the vehicle to be remotely controlled based on the followable mobile object information as shown in FIG.
- the determination unit 13 determines a vehicle other than the remote-controlled vehicle in the determined group as a follow-up vehicle (step S27).
- the following vehicle is an example of the second moving body.
- the determination unit 13 determines the vehicle with the earliest scheduled arrival time as the vehicle to be remotely controlled, the vehicle other than the vehicle with the earliest scheduled arrival time is determined as the following vehicle, and the current position is closest to the remote control point.
- the vehicle is determined to be the vehicle to be remotely controlled, the vehicle other than the vehicle whose current position is closest to the remote control point is determined to be the following vehicle.
- the determination unit 13 may determine a vehicle other than the remote-controlled vehicle determined based on the followable mobile object information as the follow-up vehicle.
- the determination unit 13 follows among two or more following vehicles. The order of may be determined.
- the determination unit 13 determines the remote-controlled vehicle and the following vehicle based on the followable moving object information, in other words, when the remote-controlled vehicle and the following vehicle are determined without considering the estimated arrival time or position.
- the current position of the remote-controlled vehicle may be located behind the current position of the following vehicle.
- the determination unit 13 determines the vehicle with the earliest estimated time of arrival or the vehicle whose current position is closest to the remote control point as the remote control target vehicle, and determines the other vehicles as the follow-up vehicle.
- the current position of the remote-controlled vehicle is not always located ahead of the current position of the following vehicle.
- the instruction unit 15 determines whether or not the following vehicle is a following vehicle of the vehicle to be remotely controlled (step S28). For example, by determining whether or not the following vehicle exists within a predetermined distance toward the rear from the remote-controlled vehicle, it is determined whether or not the following vehicle is a following vehicle of the remote-controlled vehicle. You may. Whether or not the following vehicle exists within a predetermined distance from the remote-controlled vehicle toward the rear may be determined based on the sensing data of the sensor of the remote-controlled vehicle or the following vehicle, or GPS (Global Positioning). System) It may be determined based on the data.
- the instruction unit 15 determines at least one of the remote-controlled vehicle and the following vehicle so that the following vehicle becomes the following vehicle of the remote-controlled vehicle.
- the running control of the vehicle is performed (step S29). For example, running control is performed to reduce or stop the speed of the following vehicle, or to increase the speed of the remote-controlled vehicle. Alternatively, both running control for reducing or stopping the speed of the following vehicle and running control for increasing the speed of the remote-controlled vehicle are performed.
- the traveling control to stop may be performed, for example, when there is an area where parking on the road is possible. Further, even when the following vehicle is located behind the remote-controlled vehicle, the distance between the remote-controlled vehicle and the following vehicle may be large.
- running control is performed to reduce or stop the speed of the vehicle subject to remote control, or to increase the speed of the following vehicle.
- another vehicle may exist between the remote-controlled vehicle and the following vehicle.
- running control is performed to reduce or stop the speed of the vehicle subject to remote control, or to increase the speed of the following vehicle to overtake another vehicle.
- the overtaking driving control may be performed, for example, when there is an area where overtaking is possible (for example, an overtaking lane).
- the remote-controlled vehicle may be controlled other than the traveling control such as deceleration or stop.
- the travel route to the destination may be changed to select a travel route that arrives at the destination earlier.
- the determination unit 13 is a remote control target according to the position, estimated arrival time, remaining distance, etc. of each vehicle that changes sequentially while the determined remote control target vehicle and the following vehicle are traveling to the remote control point. Vehicle and follower vehicle assignments may be changed.
- the determination unit 13 has already determined that the following vehicle is located in front of the remote-controlled vehicle while the determined remote-controlled vehicle and the following vehicle are traveling to the remote-controlled point.
- the determined following vehicle may be redetermined as the remote control target vehicle, and the already determined remote control target vehicle may be redetermined as the follow vehicle.
- the determination unit 13 is a vehicle that is predicted not to arrive at the remote control point in the same time zone while the determined remote control target vehicle and the following vehicle are traveling to the remote control point (for example, the current estimated time of arrival). If a vehicle with a large difference from the original estimated time of arrival) occurs, the vehicle may be removed from the group of remote control with follow-up. For example, if the vehicle is a vehicle subject to remote control, the remote control with follow-up may be canceled. Alternatively, a plurality of vehicles arriving at the remote control point at the same time zone may be determined again as a new group.
- step S28 When the following vehicle is a following vehicle of the remote control target vehicle (Yes in step S28), or in step S29, travel control of at least one of the remote control target vehicle and the following vehicle is performed, and the following vehicle is the remote control target.
- the presenting unit 14 presents the remote control with follow-up to the operator (step S30), and the instruction unit 15 instructs the following vehicle to follow the remote control target vehicle. (Step S31).
- the following vehicle follows the remotely controlled vehicle to be remotely controlled, so that the operator can remotely control the presented vehicle to be remotely controlled and pass through the remote control point at the same time.
- the vehicle to be controlled and the following vehicle can be collectively traveled at the remote control point. Therefore, it is possible to reduce the burden on the operator who remotely controls a plurality of vehicles capable of autonomous driving at the same point at the same time zone.
- the following vehicle may be instructed to follow the vehicle to be remotely controlled. This will be described with reference to FIG.
- FIG. 6 is a diagram for explaining the timing for starting the follow-up running.
- the vehicle 50a is a remote-controlled vehicle
- the vehicle 50b is a follow-up vehicle.
- the route R1 is used as the traveling route of the vehicle 50a
- the route R2 is used as the traveling route of the vehicle 50b.
- the vehicle 50b when the vehicle 50a travels in the area A1, it is determined that the vehicle 50b is a vehicle following the vehicle 50a. For example, at this timing, the vehicle 50b can be switched from the automatic driving mode to the following driving mode. However, if the subsequent travel routes of the vehicle 50a and the vehicle 50b are different as in the route R1 and the route R2, the follow-up travel mode of the vehicle 50b is temporarily canceled in the area A2 and returned to the automatic driving mode. It is inefficient. Therefore, when the instruction unit 15 determines that the vehicle 50b is a vehicle following the vehicle 50a, and determines that the vehicles 50b and 50a are traveling in the area A3 having the same route to the remote control point. , The vehicle 50b may be instructed to follow the vehicle 50a.
- the instruction unit 15 determines that the following vehicle is the following vehicle of the remote control target vehicle, and the following vehicle and the remote control target vehicle travel in an area where the route to the remote control point is the same. If it is determined that the vehicle is operating, the following vehicle may be instructed to follow the vehicle to be remotely controlled. In addition, the following vehicle may be stopped due to the passenger getting on or off the vehicle while the service is being provided. In this case as well, the following vehicle's following driving mode should be temporarily canceled and returned to the automatic driving mode. become. Therefore, the instruction unit 15 further determines that the following vehicle does not stop due to the getting on and off of the occupant while traveling to the remote control point, so that the following vehicle follows the remote control target vehicle. You may instruct the following vehicle.
- FIG. 7 is a sequence diagram showing an example of the operation of the entire system in use case 2.
- the moving body 50 that requires remote control is the vehicle 50a
- the moving body 50 around the vehicle 50a (specifically, the vehicle following the vehicle 50a) is the vehicle 50b.
- the vehicle 50a is an example of a vehicle determined to be the first moving body
- the vehicle 50b is an example of a vehicle determined to be the second moving body.
- a predetermined event occurs in the vehicle 50a.
- the predetermined event is, for example, an event that causes the vehicle 50a to request remote control, so that the vehicle 50a is stuck or the vehicle 50a cannot continue automatic driving at the discretion of the vehicle 50a itself.
- Event Specifically, there are cases where people are controlling traffic during construction, merging into a road with heavy traffic, passing through a pedestrian crossing with a lot of traffic, or moving beyond the central lane. It will be a predetermined event.
- Vehicle 50a requests remote control from the remote control system 10 because a predetermined event has occurred (step S41).
- the remote control system 10 determines whether or not there is a following vehicle behind the vehicle 50a for which the remote control is requested (step S42).
- the remote control system 10 determines whether the vehicle 50b is a vehicle that requires remote control (step S43).
- the remote control system 10 determines that the vehicle 50b is a vehicle that requires remote control
- the remote control system 10 presents the remote control system 20 (that is, the operator) with the follow-up remote control of the vehicle 50a accompanied by the follow-up of the vehicle 50b (step S44). ..
- the remote control system 10 determines that the vehicle 50b is a vehicle that requires remote control, the remote control system 10 instructs the vehicle 50b to follow the vehicle 50a (step S45).
- the vehicle 50b switches to the follow-up travel mode, notifies the remote control system 20 that the preparation for the follow-up travel to the vehicle 50a is completed, and the remote control system 20 starts the remote control of the vehicle 50a. Then, for example, after the vehicle 50b has passed the end point of the remote control, the remote control system 20 notifies the vehicles 50a and 50b that the remote control is terminated, and the vehicles 50a and 50b are switched to the automatic driving mode.
- FIG. 8 is a flowchart showing an example of the operation of the remote control system 10 in the use case 2.
- the remote control system 10 receives a remote control request from the mobile body 50 (for example, the vehicle 50a) (step S51).
- the acquisition unit 11 acquires the remote control point, which is the point where the vehicle 50a that has requested remote control is located.
- the specific unit 12 determines whether or not there is a following vehicle in the vehicle 50a for which remote control is requested (step S52). For example, the specific unit 12 may determine the presence or absence of the following vehicle based on the sensing data behind the vehicle 50a. For example, when the distance between the vehicle 50a and the vehicle behind the vehicle 50a is within a predetermined distance (for example, 5 m or the like), the specific unit 12 may determine the vehicle behind the vehicle as the following vehicle. Even if the distance between the vehicle 50a and the vehicle behind the vehicle 50a is within a predetermined distance, if there is a traffic light between the vehicle 50a and the vehicle behind the vehicle 50a, the specific unit 12 is behind the vehicle 50a. It is not necessary to determine that the vehicle is the following vehicle.
- a predetermined distance for example, 5 m or the like
- the specific unit 12 may consider the state of the traffic light, and when there is a traffic light between the vehicle 50a and the vehicle behind the vehicle 50a, when the traffic light shows blue, the vehicle behind the vehicle 50a is used. It may be determined that the vehicle is a following vehicle, and when the traffic light indicates red, the vehicle behind the vehicle 50a may not be determined as a following vehicle. When the distance between the vehicle 50a and the vehicle behind the vehicle 50a is larger than the predetermined distance, the vehicle 50a may stand by so that the distance is within the predetermined distance.
- the waiting time is not particularly limited, but the waiting time may be set short because it may interfere with other traffic. Alternatively, the vehicle 50a may not stand by if it is determined that it interferes with other traffic. Further, if there is a risk that the quality of service may deteriorate due to the standby, the vehicle 50a may not wait.
- the specifying unit 12 identifies the vehicles 50a and 50b as a plurality of moving bodies 50 passing through the remote control point in the same time zone.
- the specific unit 12 determines the vehicles 50a and 50b as a group of follow-up remote control.
- the group may be determined by using the position information, operation information, vehicle information, etc. of each vehicle managed by the remote control system 10 when a request for remote control from the vehicle 50a is generated.
- the determination unit 13 determines whether or not the following vehicle (vehicle 50b) is a vehicle that requires remote control (step S53).
- the vehicle 50b is an autonomous driving vehicle
- the reason why the vehicle 50a, which is an autonomous driving vehicle, has requested remote control is that it is considered that the vehicle 50b, which is an automatic driving vehicle traveling behind the vehicle 50a, also requires remote control.
- the vehicle 50b may be determined whether or not the vehicle 50b is an autonomous driving vehicle by recognizing an image obtained from the sensor of the vehicle 50a. For example, if the characteristics peculiar to an autonomous vehicle are extracted from the appearance of the vehicle shown in the image, the license plate shown in the image is the autonomous vehicle on the assumption that the license plate has information indicating whether or not the vehicle is an autonomous vehicle. , Or when the driver is not shown in the image, it can be determined that the vehicle 50b is an autonomous driving vehicle.
- the vehicle 50b may be determined from the position information of the vehicle 50b whether or not the vehicle 50b is an autonomous driving vehicle. For example, when the remote control system 10 grasps the current position information of all the autonomous driving vehicles to be managed by itself, the current position of the vehicle 50b is the current position of all the autonomous driving vehicles managed by the remote control system 10. When it matches any of the positions, it can be determined that the vehicle 50b is an autonomous driving vehicle.
- the vehicle 50a may inquire from the vehicle 50b whether or not the vehicle 50b is an autonomous driving vehicle by inter-vehicle communication, so that it may be determined whether or not the vehicle 50b is an autonomous driving vehicle.
- the vehicle 50b (or a vehicle of the same vehicle type as the vehicle 50b) has a track record of being remotely controlled at the same remote control point in the past, it may be determined that the vehicle 50b is a vehicle that requires remote control.
- the driver of the vehicle 50b may be inquired as to whether to switch to the follow-up driving mode or to perform manual driving, and the driver chooses to switch to the follow-up driving. In some cases, it may be determined that the vehicle 50b is a vehicle that requires remote control.
- the remote control system 10 can instruct the vehicle 50b to follow the vehicle, it may be determined that the vehicle 50b is a vehicle that requires remote control. This is because when the vehicle 50b is managed by a system different from the remote control system 10 that manages the vehicle 50a, the remote control system 10 cannot instruct the vehicle 50b to follow the vehicle.
- the determination unit 13 determines the vehicle 50a as the remote control target vehicle (that is, the first moving body) and the vehicle 50b as the following vehicle (that is, the second moving body). ..
- the vehicle 50a requesting remote control may be determined to be the following vehicle, and the vehicle 50b may be determined to be the vehicle to be remotely controlled. In this case, at least one of the vehicles 50a and 50b may be travel-controlled so that the vehicle 50a becomes a vehicle following the vehicle 50b.
- the presenting unit 14 presents the remote control with follow-up of the vehicle 50a to the operator (step S54), and the instruction unit 15 requests remote control.
- the following vehicle (vehicle 50b) is instructed to follow the vehicle 50a and travel (step S55).
- the vehicle 50b follows the remotely controlled vehicle 50a and moves, so that the operator can remotely control the presented vehicle 50a and the vehicles 50a and 50b passing through the remote control point at the same time zone. It can be run together at a remote control point. Therefore, it is possible to reduce the burden on the operator who remotely controls a plurality of vehicles capable of autonomous movement at the same point at the same time zone.
- step S52 when there is no following vehicle in the vehicle 50a (No in step S52), or when the vehicle 50b is not a vehicle requiring remote control (No in step S53), the presenting unit 14 makes the operator perform normal remote control. Present (step S56). In this case, the operator remotely controls the vehicle 50a that the other vehicle is not following.
- the second mobile object may be set as a remote monitoring target by the remote monitoring operator.
- the second mobile is set as a monitoring target in the remote monitoring system and is monitored by the remote monitoring operator.
- the second mobile body may be set as a remote monitoring target. Specific conditions are, for example, that the remote control point is a place with poor visibility, that the number or density of obstacles such as people and parked vehicles in and around the remote control point is above the threshold, and that the traffic volume at the remote control point is above the threshold.
- the remote control point is a point where remote control with follow-up has never been performed in the past, the time zone of remote control with follow-up is evening or night, and the remote control with follow-up of the remote control operator Maneuvering skills or experience are below the threshold, multiple second moving objects are selected, and so on.
- the determination of a particular condition is performed based on sensing information obtained from a sensor in the first mobile, second mobile, or infrastructure or information collected from an external device (eg, map information, traffic information, weather information). You may.
- the remote monitoring operator is an operator different from the remote control operator of the first mobile body.
- the monitoring priority of the second mobile object may be set higher than that of other monitoring targets. Further, the monitoring priority of the second mobile body satisfying a specific condition may be set high. Specific conditions are, for example, that the remote control point is a place with poor visibility, that the number or density of obstacles such as people and parked vehicles in and around the remote control point is above the threshold, and that the traffic volume at the remote control point is above the threshold. It is above the threshold, the remote control point is a point where remote control with follow-up has never been performed in the past, the time zone of remote control with follow-up is evening or night, and the remote control with follow-up of the remote control operator Maneuvering skills or experience are below the threshold, multiple second moving objects are selected, and so on.
- the remote monitoring operator may be given the authority to perform an emergency stop operation on the second mobile object.
- the remote control of the first mobile body may be canceled, or the remote control operator may be proposed to cancel the remote control. Further, the remote control operator may be notified of the emergency stop of the second mobile body.
- a control may be added that does not allow remote control of the first mobile body when the second mobile body is not monitored. For example, remote control of the first mobile is not permitted unless the second mobile is set as a remote monitoring target. Alternatively, it may be determined whether or not the remote monitoring operator is monitoring the second mobile body, and remote control of the first mobile body may be permitted only when it is determined that the remote monitoring operator is monitoring.
- the present disclosure can be realized as a program for causing a processor to execute a step included in an information processing method. Further, the present disclosure can be realized as a non-temporary computer-readable recording medium such as a CD-ROM in which the program is recorded.
- each step is executed by executing the program using hardware resources such as a computer CPU, memory, and input / output circuit. .. That is, each step is executed by the CPU acquiring data from the memory or the input / output circuit or the like and performing an operation, or outputting the operation result to the memory or the input / output circuit or the like.
- hardware resources such as a computer CPU, memory, and input / output circuit. .. That is, each step is executed by the CPU acquiring data from the memory or the input / output circuit or the like and performing an operation, or outputting the operation result to the memory or the input / output circuit or the like.
- each component included in the information processing system may be configured by dedicated hardware or may be realized by executing a software program suitable for each component.
- Each component may be realized by a program execution unit such as a CPU or a processor reading and executing a software program recorded on a recording medium such as a hard disk or a semiconductor memory.
- LSI Part or all of the functions of the information processing system according to the above embodiment are typically realized as an LSI which is an integrated circuit. These may be individually integrated into one chip, or may be integrated into one chip so as to include a part or all of them. Further, the integrated circuit is not limited to the LSI, and may be realized by a dedicated circuit or a general-purpose processor. An FPGA (Field Programmable Gate Array) that can be programmed after the LSI is manufactured, or a reconfigurable processor that can reconfigure the connection and settings of the circuit cells inside the LSI may be used.
- FPGA Field Programmable Gate Array
- This disclosure can be applied to autonomous driving vehicles and the like capable of automatic driving and remote control.
- Remote control system 11 Acquisition part 12 Specific part 13 Decision part 14 Presentation part 15 Instruction part 16 Storage part 20
Abstract
情報処理方法は、自律移動、及び移動のための遠隔操縦が可能な移動体の遠隔操縦が行われる地点である遠隔操縦地点を取得し(S11)、少なくとも1つの移動体の位置に基づいて、同一時間帯に遠隔操縦地点を通過する複数の移動体を特定し(S12)、特定した複数の移動体のうちから遠隔操縦する第1移動体、及び第1移動体を追従する第2移動体を決定し(S13)、遠隔操縦地点において第1移動体を遠隔操縦するようにオペレータに提示し(S14)、第1移動体が遠隔操縦されている間は第1移動体を追従するように第2移動体に指示する(S15)処理を含む。
Description
本開示は、情報処理方法及び情報処理システムに関する。
例えば特許文献1には、ドライバなしで自律走行が可能な車両を遠隔地にいるオペレータによって遠隔操縦するための装置が開示されている。これにより、このような車両が自身の判断で走行することができない場合に、遠隔地にいるオペレータが車両を遠隔操縦して車両を走行させることができる。
しかし、自律移動可能な複数の移動体について同一時間帯に同一の地点において遠隔操縦が求められる状況が発生し得る。この場合、オペレータは複数の移動体をそれぞれ遠隔操縦することになるため、オペレータの負担が大きい。
そこで、本開示は、自律移動可能な複数の移動体を同一時間帯に同一の地点において遠隔操縦するオペレータの負担を軽減できる情報処理方法等を提供する。
本開示に係る情報処理方法は、コンピュータにより実行される情報処理方法であって、自律移動、及び移動のための遠隔操縦が可能な移動体の遠隔操縦が行われる地点である遠隔操縦地点を取得し、少なくとも1つの移動体の位置に基づいて、同一時間帯に前記遠隔操縦地点を通過する複数の移動体を特定し、特定した前記複数の移動体のうちから遠隔操縦する第1移動体、及び前記第1移動体を追従する第2移動体を決定し、前記遠隔操縦地点において前記第1移動体を遠隔操縦するようにオペレータに提示し、前記第1移動体が遠隔操縦されている間は前記第1移動体を追従するように前記第2移動体に指示する。
なお、これらの包括的又は具体的な態様は、システム、方法、集積回路、コンピュータプログラム又はコンピュータ読み取り可能なCD-ROMなどの記録媒体で実現されてもよく、システム、方法、集積回路、コンピュータプログラム及び記録媒体の任意な組み合わせで実現されてもよい。
本開示の一態様に係る情報処理方法等によれば、自律移動可能な複数の移動体を同一時間帯に同一の地点において遠隔操縦するオペレータの負担を軽減できる。
本開示の一態様に係る情報処理方法は、コンピュータにより実行される情報処理方法であって、自律移動、及び移動のための遠隔操縦が可能な移動体の遠隔操縦が行われる地点である遠隔操縦地点を取得し、少なくとも1つの移動体の位置に基づいて、同一時間帯に前記遠隔操縦地点を通過する複数の移動体を特定し、特定した前記複数の移動体のうちから遠隔操縦する第1移動体、及び前記第1移動体を追従する第2移動体を決定し、前記遠隔操縦地点において前記第1移動体を遠隔操縦するようにオペレータに提示し、前記第1移動体が遠隔操縦されている間は前記第1移動体を追従するように前記第2移動体に指示する。
これによれば、遠隔操縦される第1移動体に第2移動体が追従して移動するため、オペレータは、提示された第1移動体を遠隔操縦するだけで、同一時間帯に遠隔操縦地点を通過する複数の移動体を遠隔操縦地点においてまとめて移動させることができる。したがって、自律移動可能な複数の移動体を同一時間帯に同一の地点において遠隔操縦するオペレータの負担を軽減できる。
また、前記複数の移動体の特定では、前記少なくとも1つの移動体の移動計画を取得し、前記少なくとも1つの移動体の位置及び移動計画に基づいて前記複数の移動体を特定してもよい。
例えば、遠隔操縦地点が予めわかっている場合には、移動体の位置及び移動計画から移動体が遠隔操縦地点を通過するか否かを特定でき、移動体が遠隔操縦地点を通過する場合には遠隔操縦地点を通過する時間帯を特定することができる。したがって、同一時間帯に遠隔操縦地点を通過すると予測される複数の移動体を特定することができる。
また、前記第1移動体及び前記第2移動体の決定では、前記複数の移動体の位置及び移動計画を取得し、前記複数の移動体の位置及び移動計画に基づいて、前記複数の移動体のうちの最も早く前記遠隔操縦地点に到達する移動体を前記第1移動体として決定し、他の移動体を前記第2移動体として決定してもよい。
複数の移動体のうちの最も早く遠隔操縦地点に到達すると推測される移動体は、遠隔操縦地点において当該移動体より遅れて遠隔操縦地点に到達すると推測される他の移動体の前方に位置することになりやすい。このため、複数の移動体のうちの最も早く遠隔操縦地点に到達すると推測される移動体を第1移動体として決定し、他の移動体を第2移動体として決定することで、第2移動体を第1移動体に追従させながら第1移動体をオペレータに遠隔操縦させるモードに円滑に切り替えることができる。言い換えると、第1移動体と第2移動体の進行方向における順序を入れ替えずに済む。
また、前記第1移動体及び前記第2移動体の決定では、前記複数の移動体の遠隔操縦又は追従に関する移動体の適性を取得し、前記適性に基づいて、前記複数の移動体から遠隔操縦に適した移動体を前記第1移動体として決定し、他の移動体を前記第2移動体として決定する、又は、前記複数の移動体から追従に適した移動体を前記第2移動体として決定し、他の移動体を前記第1移動体として決定する、又は、前記複数の移動体から遠隔操縦に適していない移動体を前記第2移動体として決定し、他の移動体を前記第1移動体として決定する、又は、前記複数の移動体から追従に適していない移動体を前記第1移動体として決定し、他の移動体を前記第2移動体として決定してもよい。
このように、遠隔操縦に適した移動体又は追従に適していない移動体を第1移動体に決定してもよいし、追従に適した移動体又は遠隔操縦に適していない移動体を第2移動体に決定してもよい。これにより、遠隔操縦の効率を向上させる、又は効率の低下を抑制することができる。
また、さらに、前記第1移動体及び前記第2移動体の位置及び移動計画に基づいて、遠隔操縦の開始時点において前記第2移動体が前記第1移動体に後続するか否かを判定し、前記第2移動体が前記第1移動体に後続しない場合、前記第2移動体が前記第1移動体に後続するように前記第1移動体及び前記第2移動体の少なくとも一方の移動を指示してもよい。
例えば、決定された第1移動体及び第2移動体の現状の位置及び移動計画によっては、遠隔操縦の開始時点において第2移動体が第1移動体に後続していない場合がある。そこで、遠隔操縦の開始時点において第2移動体が第1移動体に後続しないと判定される場合には、第2移動体が第1移動体に後続するように第1移動体及び第2移動体の少なくとも一方の移動を指示することで、遠隔操縦の開始時点において第2移動体を第1移動体に後続させることができる。したがって、遠隔操縦の開始時点において、第2移動体を第1移動体に追従させながら第1移動体をオペレータに遠隔操縦させるモードに円滑に切り替えることができる。また、第1移動体に追従できない第2移動体を減らし、遠隔操縦の回数を削減することができる。
また、前記移動の指示では、移動時間、停止時間、移動速度及び移動範囲のうちの少なくとも1つの制約を取得し、前記少なくとも1つの制約にしたがって、前記第1移動体及び前記第2移動体の少なくとも一方の移動を指示してもよい。
例えば、移動体によっては、移動体の移動計画等に応じた移動可能な移動時間及び停止可能な停止時間に関する制約があったり、移動体の最高速度又は最低速度に関する制約があったり、移動体が移動可能な移動範囲に関する制約があったりする。そこで、これらの制約にしたがって移動の指示が行われることで、これらの制約を守ったまま移動の指示を行うことができる。
また、前記遠隔操縦地点は、遠隔操縦を要求する移動体が位置する地点であり、前記複数の移動体の特定では、前記少なくとも1つの移動体の位置として、遠隔操縦を要求する移動体の位置、及び当該移動体の周辺の移動体の位置に基づいて前記複数の移動体を特定してもよい。
例えば、遠隔操縦地点が予めわかっていない場合には、遠隔操縦を要求する移動体の位置が遠隔操縦地点となり得る。この場合には、遠隔操縦を要求する移動体の位置、及び当該移動体の周辺の移動体の位置から、遠隔操縦を要求する移動体及び当該移動体の周辺の移動体を、同一時間帯に遠隔操縦地点を通過すると予測される複数の移動体として特定することができる。
また、前記第2移動体の決定では、前記遠隔操縦地点において遠隔操縦を要求する移動体を前記第2移動体として決定してもよい。
このように、遠隔操縦地点において遠隔操縦を要求すると推測される移動体を第2移動体として決定することで、このような移動体を第1移動体に追従させて間接的に遠隔操縦することができる。また、遠隔操縦を要求すると推測されない移動体には、自律移動を継続させることで、オペレータの負担を軽減できる。
また、前記第2移動体の決定では、自律移動及び遠隔操縦が可能か否かの操縦特性、遠隔操縦の履歴、移動体の乗員による手動操縦の要望有無、又は、管理対象の移動体であるか否かの管理属性、に基づいて、前記遠隔操縦地点において遠隔操縦を要求すると推測される移動体を前記第2移動体として決定してもよい。
このように、移動体が遠隔操縦地点において遠隔操縦を要求するか否かを、自律移動及び遠隔操縦が可能か否かの操縦特性、遠隔操縦の履歴、移動体の乗員による手動操縦の要望有無、又は、管理対象の移動体であるか否かの管理属性に基づいて推測することができる。
また、前記第2移動体の決定では、追従に関する移動体の適性、移動体の追従を伴う遠隔操縦のためのオペレータのスキル若しくは経験、又は、移動時間、停止時間、移動速度及び移動範囲のうちの少なくとも1つの制約、に基づいて前記第2移動体を決定してもよい。
このように、追従に関する移動体の適性が追従に適している移動体、又は、移動時間、停止時間、移動速度及び移動範囲のうちの少なくとも1つの制約を満たしている移動体を第2移動体として決定することができる。或いは、移動体の追従を伴う遠隔操縦のためのオペレータのスキル又は経験が十分な場合に第2移動体を決定することができる。
また、前記提示では、さらに、遠隔操縦に対するオペレータの負荷が閾値以上若しくは余力が閾値未満である場合、又は、遠隔操縦の要因が移動に影響する移動体における異常でない場合、前記第2移動体の追従を伴う前記第1移動体の遠隔操縦を実行すると決定してもよい。
例えば、第2移動体の追従を伴う第1移動体の遠隔操縦では、第2移動体の追従を伴っているということもありオペレータは慎重に遠隔操縦を行うことが多いため、複数の移動体の移動速度が全体的に遅くなり非効率になってしまう。これに対して、遠隔操縦に対するオペレータの負荷が閾値未満又は余力が閾値以上である場合には、オペレータに余裕があるため、第2移動体の追従を伴う第1移動体の遠隔操縦を実行せずに、複数の移動体のそれぞれについて遠隔操縦を行うことができ、複数の移動体を効率的に移動させることができる。また、遠隔操縦の要因が移動に影響する移動体における異常である場合に、第2移動体の追従を伴う第1移動体の遠隔操縦が行われると、安全性に問題が生じるおそれがある。このため、遠隔操縦の要因が移動に影響する移動体における異常でない場合に第2移動体の追従を伴う第1移動体の遠隔操縦が実行されることで、安全性を確保することができる。
また、前記提示では、さらに、前記第2移動体への追従の指示の後、オペレータによる前記第1移動体の遠隔操縦を許可してもよい。
これによれば、第2移動体が第1移動体に追従する準備が完了する前に第1移動体の遠隔操縦が開始されてしまうことを抑制できる。
また、前記提示では、さらに、前記第2移動体の追従を伴う前記第1移動体の遠隔操縦中は、前記第2移動体におけるセンサのセンシングデータを前記第2移動体から取得し、前記センシングデータをオペレータに提示してもよい。
これによれば、オペレータは、第1移動体に追従している第2移動体のセンシングデータを確認しながら(言い換えると第2移動体の周辺の状況を確認しながら)第2移動体の追従を伴う第1移動体の遠隔操縦を行うことができる。したがって、遠隔操縦される第1移動体に追従して直接的には遠隔操縦されない第2移動体の安全性を確保することができる。
また、前記提示では、さらに、前記第2移動体の追従を伴う前記第1移動体の遠隔操縦中は、前記第2移動体におけるセンサを制御するための操作インタフェースをオペレータに提供し、前記第2移動体への追従の指示では、さらに、前記操作インタフェースにおける操作に基づいて前記センサの制御を指示してもよい。
これによれば、オペレータは、第2移動体におけるセンサを制御して、第2移動体の周辺のうちの所望の領域の状況を確認しながら第2移動体の追従を伴う第1移動体の遠隔操縦を行うことができる。したがって、遠隔操縦される第1移動体に追従して直接的には遠隔操縦されない第2移動体の安全性を確保することができる。
また、前記提示では、さらに、前記第1移動体と前記第2移動体とで移動体の移動特性が異なる場合、前記第2移動体の追従を伴う前記第1移動体の遠隔操縦中は、オペレータによる前記第1移動体の遠隔操縦及び少なくとも前記第2移動体の移動特性に基づいて推測される前記第2移動体の移動軌跡を、オペレータに提示してもよい。
例えば、第1移動体と第2移動体とで移動体の移動特性が異なる場合、第1移動体に追従する第2移動体の移動軌跡が、遠隔操縦される第1移動体の移動軌跡と異なる場合がある。特に、第2移動体のサイズが第1移動体のサイズよりも大きい場合に、第1移動体を遠隔操縦したときに第1移動体は障害物等に衝突しないように移動したとしても、第1移動体に追従する第2移動体が障害物等に衝突してしまうおそれがある。そこで、推測された第2移動体の移動軌跡がオペレータに提示されることで、オペレータは第2移動体の移動軌跡も考慮して第1移動体の遠隔操縦をすることができ、第2移動体の安全性を確保することができる。
また、前記第2移動体への追従の指示では、前記第2移動体の追従を伴う前記第1移動体の遠隔操縦が終了するまで、前記第1移動体の追従を継続するように前記第2移動体に指示してもよい。
例えば、第1移動体がオペレータに遠隔操縦されている間に、第2移動体による第1移動体の追従が解除されると安全性に問題が生じるおそれがある。第1移動体がオペレータに遠隔操縦されているという状況は、第1移動体が自律移動することが難しい状況にあり、第1移動体に追従する第2移動体も第1移動体と同様に自律移動することが難しい状況にあるためである。このため、第1移動体の遠隔操縦が終了する前に第2移動体の第1移動体への追従が解除されることを抑制でき、第2移動体の安全性を確保することができる。
また、前記提示では、さらに、前記第2移動体の追従を伴う前記第1移動体の遠隔操縦中は、前記遠隔操縦地点、前記第1移動体の位置及び前記第2移動体の位置に基づいて、遠隔操縦の終了地点と前記第2移動体の位置との関係をオペレータに提示してもよい。
これによれば、オペレータは、第2移動体が遠隔操縦の終了地点を通過したのを確認した後に、第1移動体の遠隔操縦を終了することができる。このため、第2移動体が遠隔操縦の終了地点を通過する前に第2移動体の第1移動体への追従が解除されることを抑制でき、第2移動体の安全性を確保することができる。
本開示の一態様に係る情報処理システムは、自律移動、及び移動のための遠隔操縦が可能な移動体の遠隔操縦が行われる地点である遠隔操縦地点を取得する取得部と、少なくとも1つの移動体の位置に基づいて、同一時間帯に前記遠隔操縦地点を通過する複数の移動体を特定する特定部と、特定された前記複数の移動体のうちから遠隔操縦する第1移動体、及び前記第1移動体を追従する第2移動体を決定する決定部と、前記遠隔操縦地点において前記第1移動体を遠隔操縦するようにオペレータに提示する提示部と、前記第1移動体が遠隔操縦されている間は前記第1移動体を追従するように前記第2移動体に指示する指示部と、を備える。
これによれば、自律移動可能な複数の移動体を同一時間帯に同一の地点において遠隔操縦するオペレータの負担を軽減できる情報処理システムを提供できる。
以下、実施の形態について、図面を参照しながら具体的に説明する。
なお、以下で説明する実施の形態は、いずれも包括的又は具体的な例を示すものである。以下の実施の形態で示される数値、形状、材料、構成要素、構成要素の配置位置及び接続形態、ステップ、ステップの順序などは、一例であり、本開示を限定する主旨ではない。
(実施の形態)
以下、実施の形態に係る情報処理方法及び情報処理システムについて説明する。
以下、実施の形態に係る情報処理方法及び情報処理システムについて説明する。
図1は、実施の形態に係る遠隔管制システム10、遠隔操縦システム20及び移動体50からなる全体システムを示すイメージ図である。
移動体50は、自律移動、及び移動のための遠隔操縦が行われ得る移動体である。以下では移動体50を自動運転車両として説明するが、移動体50は無人航空機等であってもよい。例えば、複数の移動体50が道路等を走行しており、複数の移動体50は車車間通信により互いに通信し、また、無線通信により遠隔管制システム10及び遠隔操縦システム20と通信する。例えば、移動体50は、カメラ又はLiDAR(Light Detection And Ranging)等のセンサを備え、センシングデータを遠隔管制システム10及び遠隔操縦システム20へ送信することができる。また、例えば、移動体50は、遠隔管制システム10からの指示に応じて、運転モード(自律自動モード及び遠隔操縦モード等)を切り替える機能を有する。また、移動体50は、イベント(詳細は後述する)が発生したときに遠隔管制システム10に対して遠隔操縦を要求する機能を有していてもよい。
遠隔管制システム10は、移動体50を遠隔操縦するために移動体50を監視し、遠隔操縦システム20に移動体50を遠隔操縦するための指示を行うシステムである。遠隔管制システム10は、情報処理システムの一例である。遠隔管制システム10の詳細については後述する。
遠隔操縦システム20は、移動体50を遠隔操縦するためのシステムであり、オペレータは、遠隔操縦システム20を介して移動体50を遠隔操縦する。例えば、遠隔操縦システム20は、移動体50を遠隔操縦するための操縦部(例えばハンドル)及び移動体50のセンサのセンシングデータに基づく移動体50の周辺の映像又はLiDAR等のセンシング結果を表示する表示部等を備え、オペレータは、表示部を見ながら操縦部を操作することで移動体50を遠隔操縦することができる。
なお、遠隔管制システム10と遠隔操縦システム20とは同じ施設内に設けられていてもよく、遠隔管制システム10と遠隔操縦システム20とが一体化(例えば、遠隔管制システム10に遠隔操縦システム20が含まれていてもよい)していてもよい。
次に、遠隔管制システム10の構成について、図2を用いて説明する。
図2は、実施の形態に係る遠隔管制システム10の一例を示すブロック図である。
遠隔管制システム10は、取得部11、特定部12、決定部13、提示部14、指示部15及び記憶部16を備える。
例えば、遠隔管制システム10は、プロセッサ及びメモリ等を含むコンピュータである。メモリは、ROM(Read Only Memory)及びRAM(Random Access Memory)等であり、プロセッサにより実行されるプログラムを記憶することができる。取得部11、特定部12、決定部13、提示部14及び指示部15は、メモリに格納されたプログラムを実行するプロセッサ等によって実現される。プログラムを記憶するメモリは、記憶部16であってもよいし、記憶部16とは別のメモリであってもよい。
例えば、遠隔管制システム10を構成する構成要素は、サーバによって実現されてもよい。また、遠隔管制システム10を構成する構成要素は、複数のサーバに分散して配置されてもよい。また、例えば、遠隔管制システム10を構成する構成要素の少なくとも一部は、移動体50(例えば後述する第1移動体)に搭載される装置によって実現されてもよい。
取得部11は、自律移動、及び移動のための遠隔操縦が可能な移動体の遠隔操縦が行われる地点である遠隔操縦地点を取得する。
特定部12は、少なくとも1つの移動体50の位置に基づいて、同一時間帯に遠隔操縦地点を通過する複数の移動体50を特定する。
決定部13は、特定された複数の移動体50のうちから遠隔操縦する第1移動体、及び第1移動体を追従する第2移動体を決定する。
提示部14は、遠隔操縦地点において第1移動体を遠隔操縦するようにオペレータに提示する。
指示部15は、第1移動体が遠隔操縦されている間は第1移動体を追従するように第2移動体に指示する。
例えば、遠隔管制システム10では、遠隔管制システム10の管理対象である各移動体50についての位置を示す位置情報、出発地、目的地及び移動経路等を示す移動計画情報、移動時間、停止時間、移動速度及び移動範囲等の制約を示す制約情報、自律移動及び遠隔操縦が可能か否かの操縦特性を示す操縦特性情報、追従可能な移動体若しくは追従させられる移動体の追従に関する適性を示す追従可能移動体情報、遠隔操縦可能な移動体の遠隔操縦に関する適性を示す遠隔操縦可能移動体情報、車種、車両サイズ、センサの搭載数、センサの種別、センサの搭載位置等を示す移動体情報、遠隔操縦についての履歴を示す履歴情報、並びに、予めわかっている遠隔操縦地点を示す遠隔操縦地点情報等が管理されており、記憶部16にはこれらの情報が記憶される。なお、これらの情報は、外部システムに記憶されていてもよく、遠隔管制システム10は、外部システムからこれらの情報を取得してもよい。
図3は、追従可能移動体情報の一例を示す図である。
例えば、追従可能移動体情報は、移動体50毎に追従可能な移動体50を示す情報であってもよく、図3に示されるように、車両Aは、車両B及びCに追従可能であり、車両Bは、車両A及びEに追従可能であり、車両Zは、車両B及びXに追従可能であるといったように、移動体50毎に追従可能な移動体50が管理されてもよい。また、例えば、追従可能移動体情報は、移動体50毎に追従される移動体50を示す情報であってもよく、車両Aは、車両B及びCに追従され、車両Bは、車両A及びEに追従され、車両Zは、車両B及びXに追従されるといったように、移動体50毎に追従される移動体50が管理されてもよい。
遠隔管制システム10の各機能構成要素の詳細について、図4を用いて説明する。
図4は、実施の形態に係る情報処理方法の一例を示すフローチャートである。情報処理方法は、コンピュータ(遠隔管制システム10)により実行される方法である。このため、図4は、実施の形態に係る遠隔管制システム10の動作の一例を示すフローチャートでもある。すなわち、以下の説明は、遠隔管制システム10の動作の説明でもあり、情報処理方法の説明でもある。
まず、取得部11は、遠隔操縦地点を取得する(ステップS11)。取得部11は、予めわかっている遠隔操縦地点を記憶部16から取得してもよいし、移動体50においてイベントが発生したときに遠隔操縦を要求する当該移動体50が位置する地点を遠隔操縦地点(つまり、予めわからない遠隔操縦地点)として取得してもよい。
遠隔操縦地点とは、移動体50の遠隔操縦が必要となる地点であり、言い換えると、当該地点において移動体50が遠隔操縦を要するような所定のイベントが発生する地点である。所定のイベントとは、移動体50がスタックしたり、移動体50が移動体50自身の判断で自律移動を続けることが不可能になったりするようなイベントである。
予めわかっている遠隔操縦地点とは、例えば、過去に遠隔操縦が発生し、その後も繰り返し遠隔操縦が発生している地点である。具体的には、予めわかっている遠隔操縦地点は、交通量の多い道路への合流地点、道路工事中で人が交通整理をしている場所周辺の地点、人通りの多い横断歩道周辺の地点、又は、慢性的に路上駐車車両がある場所周辺の地点等である。例えば、遠隔管制システム10の管理者等の判断によって、予めわかっている遠隔操縦地点が記憶部16等に記憶されてもよい。
一方で、予めわからない遠隔操縦地点とは、例えば、過去に遠隔操縦が発生したことがなく、移動体50からの要求によって初めて遠隔操縦が発生する地点である。具体的には、予めわからない遠隔操縦地点は、突発的な路上駐車車両があり一時的に遠隔操縦が発生する地点である。
以下では、予めわかっている遠隔操縦地点を取得するケースをユースケース1として説明し、遠隔操縦を要求する移動体50が位置する地点を遠隔操縦地点として取得するケースをユースケース2として説明する。
次に、特定部12は、少なくとも1つの移動体50の位置に基づいて、同一時間帯に遠隔操縦地点を通過する複数の移動体50を特定する(ステップS12)。
ユースケース1では、特定部12は、少なくとも1つの移動体50(例えば全ての移動体50、特定の領域内の複数の移動体50、又は指定される1つの移動体50。以下、まとめて運用移動体50とも称する。)の移動計画を取得し、少なくとも1つの運用移動体50の位置及び移動計画に基づいて、同一時間帯に遠隔操縦地点を通過すると予測される複数の移動体50を特定する。例えば、遠隔操縦地点が予めわかっている場合には、移動体50の位置及び移動計画から移動体50が遠隔操縦地点を通過するか否かを特定でき、移動体50が遠隔操縦地点を通過する場合には遠隔操縦地点を通過する時間帯を特定することができる。したがって、同一時間帯に遠隔操縦地点を通過すると予測される複数の移動体50を特定することができる。
ユースケース2では、特定部12は、少なくとも1つの運用移動体50の位置として、遠隔操縦を要求する移動体50の位置、及び遠隔操縦を要求する移動体50の周辺の移動体50の位置に基づいて、同一時間帯に遠隔操縦地点を通過すると予測される複数の移動体50を特定する。例えば、遠隔操縦地点が予めわかっていない場合には、遠隔操縦を要求する移動体50の位置が遠隔操縦地点となり得る。この場合には、遠隔操縦を要求する移動体50の位置、及び遠隔操縦を要求する移動体50の周辺の移動体50の位置から、遠隔操縦を要求する移動体50及び遠隔操縦を要求する移動体50の周辺の移動体50を、同一時間帯に遠隔操縦地点を通過すると予測される複数の移動体50として特定することができる。例えば、遠隔操縦を要求する移動体50の周辺の移動体50は、遠隔操縦を要求する移動体50に搭載されたセンサの撮像範囲にいる移動体50であってもよく、或いは、遠隔操縦を要求する移動体50の位置から所定範囲内の位置にいる移動体50であってもよい。
また、ユースケース1及び2において、特定部12は、以下の機能を有していてもよい。
例えば、遠隔操縦地点付近において渋滞が発生している場合等には、数多くの移動体50が同一時間帯に遠隔操縦地点を通過すると予測される。このような場合には、各移動体50の遠隔操縦若しくは追従に関する移動体の適性、移動体50の追従を伴う遠隔操縦のためのオペレータのスキル若しくは経験、又は、遠隔操縦に対するオペレータの負荷若しくは余力に応じて、特定部12は、同一時間帯に遠隔操縦地点を通過する複数の移動体50の組を複数生成してもよい。1台の第1移動体に対して追従させる第2移動体の台数が多くなると、第2移動体の追従を伴う第1移動体の遠隔操縦が難しくなるためである。
次に、決定部13は、特定された複数の移動体50のうちから遠隔操縦する第1移動体、及び第1移動体を追従する第2移動体を決定する(ステップS13)。
例えば、ユースケース1では、決定部13は、特定された複数の移動体50の位置及び移動計画を取得し、複数の移動体50の位置及び移動計画に基づいて、複数の移動体50のうちの最も早く遠隔操縦地点に到達する移動体を第1移動体として決定し、他の移動体を第2移動体として決定してもよい。複数の移動体50のうちの最も早く遠隔操縦地点に到達すると推測される移動体50は、遠隔操縦地点において当該移動体50より遅れて遠隔操縦地点に到達すると推測される他の移動体50の前方に位置することになりやすい。このため、複数の移動体50のうちの最も早く遠隔操縦地点に到達すると推測される移動体50を第1移動体として決定し、他の移動体50を第2移動体として決定することで、第2移動体を第1移動体に追従させながら第1移動体をオペレータに遠隔操縦させるモードに円滑に切り替えることができる。言い換えると、第1移動体と第2移動体の進行方向における順序を入れ替えずに済む。
また、例えば、ユースケース1では、決定部13は、特定された複数の移動体50の遠隔操縦又は追従に関する移動体の適性を取得してもよい。決定部13は、遠隔操縦に関する適性に基づいて、複数の移動体50から遠隔操縦に適した移動体50を第1移動体として決定し、他の移動体50を第2移動体として決定してもよい。また、決定部13は、追従に関する適性に基づいて、複数の移動体50から追従に適した移動体50を第2移動体として決定し、他の移動体50を第1移動体として決定してもよい。また、決定部13は、遠隔操縦に関する適性に基づいて、複数の移動体50から遠隔操縦に適していない移動体50を第2移動体として決定し、他の移動体50を第1移動体として決定してもよい。また、決定部13は、追従に関する適性に基づいて、複数の移動体50から追従に適していない移動体50を第1移動体として決定し、他の移動体50を第2移動体として決定してもよい。このように、遠隔操縦に適した移動体50又は追従に適していない移動体50を第1移動体に決定してもよいし、追従に適した移動体50又は遠隔操縦に適していない移動体50を第2移動体に決定してもよい。これにより、遠隔操縦の効率を向上させる、又は効率の低下を抑制することができる。
例えば、複数の移動体50の遠隔操縦又は追従に関する移動体の適性は、複数の移動体50間で相対的に判断されてもよい。
例えば、遠隔操縦に適した移動体50は、搭載しているセンサの性能が高い(例えばセンシング範囲が広い等)、又は、搭載しているセンサの個数が多い移動体であってもよい。基本的には、第1移動体のセンシング情報に基づいて遠隔操縦がされるためである。また、例えば、遠隔操縦に適した移動体50は、オペレータが遠隔操縦に慣れている移動体であってもよい。また、例えば、遠隔操縦に適した移動体50は、他の移動体50よりもサイズの大きい移動体であってもよい。後続の第2移動体は単純に第1移動体と同じ経路を追従して移動することになり、オペレータが第2移動体の経路を意識せずに操縦できるためである。言い換えると、第1移動体のサイズが第2移動体のサイズよりも小さい場合、第2移動体は第1移動体と同じ経路を追従できず、第1移動体及び第2移動体のそれぞれに対して何らかの工夫が別途必要になり得る。また、遠隔操縦に適していない移動体50は、センサが故障している又はセンサに汚れが付着している移動体であってもよい。なお、これらの要素を組み合わせて、遠隔操縦に適した移動体50であるか否かが総合的に判断されてもよい。
また、特定された複数の移動体50がオペレータに提示され、オペレータに複数の移動体50のうちから第1移動体及び第2移動体を選択させてもよい。さらに、特定された複数の移動体50の遠隔操縦に関する情報が提示されてもよい。遠隔操縦に関する情報は、例えば、(1)遠隔操縦地点から移動体50までの距離又は遠隔操縦地点への到着予定時刻、(2)遠隔操縦又は追従に関する移動体の適性、(3)自律移動及び遠隔操縦が可能か否かの操縦特性、遠隔操縦の履歴、移動体の乗員による手動操縦の要望有無、又は、遠隔管制システム10の管理対象の移動体50であるか否かの管理属性などである。また、オペレータによる第1移動体及び第2移動体の選択条件が予め登録されていてもよく、当該選択条件に合致する移動体50が第1移動体又は第2移動体として自動で決定されてもよい。
例えば、ユースケース2では、決定部13は、遠隔操縦を要求する移動体50を第1移動体として決定し、遠隔操縦を要求する移動体50の周辺の移動体50(例えば遠隔操縦を要求する移動体50に後続する移動体50)を第2移動体として決定してもよい。これにより、遠隔操縦を要求する移動体50の周辺の移動体50を、遠隔操縦を要求する移動体50に追従させながら遠隔操縦を要求する移動体50をオペレータに遠隔操縦させるモードに円滑に切り替えることができる。
また、ユースケース1及び2において、決定部13は、以下の機能を有していてもよい。
例えば、決定部13は、遠隔操縦地点において遠隔操縦を要求する(要求すると推測される)移動体50を第2移動体として決定してもよい。このように、遠隔操縦地点において遠隔操縦を要求すると推測される移動体50を第2移動体として決定することで、このような移動体50を第1移動体に追従させて間接的に遠隔操縦することができる。言い換えると、遠隔操縦地点において遠隔操縦を要求しないと推測される移動体50は、遠隔操縦地点において遠隔操縦が必要になりにくいため、第1移動体を追従する第2移動体として決定しなくてもよい。つまり、遠隔操縦を要求すると推測されない移動体50には、自律移動を継続させることで、オペレータの負担を軽減できる。
例えば、決定部13は、自律移動及び遠隔操縦が可能か否かの操縦特性、遠隔操縦の履歴、移動体の乗員による手動操縦の要望有無、又は、遠隔管制システム10の管理対象の移動体50であるか否かの管理属性、に基づいて、遠隔操縦地点において遠隔操縦を要求すると推測される移動体50を第2移動体として決定してもよい。
例えば、決定部13は、少なくとも自律移動及び遠隔操縦が可能な移動体50を第2移動体として決定してもよい。言い換えると、決定部13は、自律移動及び遠隔操縦が不可能な移動体50は、遠隔操縦地点において遠隔操縦を要求する可能性が低い移動体50であると推定して、当該移動体50を第2移動体として決定しなくてもよい。自律移動及び遠隔操縦が不可能な移動体50は、例えば、自律移動及び遠隔操縦の両方の機能を有していない、又はこれらの機能が故障等で有効に機能していない移動体である。
また、例えば、決定部13は、少なくとも遠隔操縦された履歴がある移動体50を遠隔操縦地点において遠隔操縦を要求し得る移動体50であると推定して、当該移動体50を第2移動体として決定してもよい。言い換えると、決定部13は、遠隔操縦された履歴がない移動体50は、遠隔操縦地点において遠隔操縦を要求する可能性が低い移動体50であると推定して、当該移動体50を第2移動体として決定しなくてもよい。例えば、遠隔操縦された履歴とは、今回対象となる遠隔操縦地点で遠隔操縦されて走行した、又は、第1移動体に追従して走行したという履歴である。また、例えば、遠隔操縦された履歴とは、今回対象となる遠隔操縦地点で同型若しくは類似する型の他の移動体50が遠隔操縦されて走行した、又は、第1移動体に追従して走行したという履歴である。なお、遠隔操縦された履歴は、今回対象となる遠隔操縦地点の代わりに、今回対象となる遠隔操縦地点の環境と類似する別の遠隔操縦地点(例えば、合流地点等の地図上で判断できるもの)での履歴であってもよい。
また、例えば、決定部13は、少なくとも移動体50の乗員による手動操縦の要望がない移動体50を遠隔操縦地点において遠隔操縦を要求し得る移動体50であると推定して、当該移動体50を第2移動体として決定してもよい。言い換えると、決定部13は、移動体50の乗員による手動操縦の要望がある移動体50は、遠隔操縦地点において遠隔操縦を要求する可能性が低い移動体50であると推定して、当該移動体50を第2移動体として決定しなくてもよい。例えば、各移動体50の走行モードが遠隔管制システム10において管理されている場合、自動運転モードと手動運転のモードの切り替えが可能な移動体50であって、自動運転モードで走行中の移動体50は、遠隔操縦を要求する移動体とみなしてもよく、手動運転モードで走行中の移動体50は、遠隔操縦を要求しない移動体とみなしてもよい。
また、例えば、決定部13は、少なくとも遠隔管制システム10の管理対象の移動体50を遠隔操縦地点において遠隔操縦を要求し得る移動体50であると推定して、当該移動体50を第2移動体として決定してもよい。言い換えると、そもそも遠隔管制システム10の管理対象でない移動体50は、遠隔管制システム10に対して遠隔操縦を要求しない移動体であるため、決定部13は、当該移動体50を第2移動体として決定しなくてもよい。
また、特定部12が複数の移動体50の特定する処理において用いられる到着予定時刻の幅又は残距離がオペレータによって設定される値であってもよい。さらに、当該到着予定時刻の幅又は残距離が、遠隔操縦地点から移動体50までの距離に応じて変動してもよい。例えば、遠隔操縦地点から移動体50までの距離が10kmである場合に到着予定時刻の幅は45秒、遠隔操縦地点から移動体50までの距離が1kmである場合に到着予定時刻の幅は15秒、などのように到着予定時刻の幅が変動する。また、到着予定時刻の幅と同様に残距離が変動してもよい。また、上記変動の値がオペレータによって設定されてもよい。
また、特定された複数の移動体50から上述のような選択条件に基づき選択された第1移動体又は第2移動体の少なくとも一方がオペレータに提示されてもよい。さらに、提示された第1移動体又は第2移動体の少なくとも一方を承認するか否かがオペレータに問い合わされ、承認された場合に第1移動体及び第2移動体が決定されてもよい。
また、特定部12による複数の移動体の特定が機械学習モデルにより実行されてもよい。例えば、遠隔操縦地点及び遠隔操縦地点と運用移動体50との関係を示す関係データを訓練データとし、オペレータが特定した複数の移動体50を正解データとして、機械学習モデルが訓練される。関係データは、例えば遠隔操縦地点から移動体50までの距離又は遠隔操縦地点への到着予定時刻である。さらに、関係データに加えて、オペレータ、移動体50の位置(又は位置の属する領域の種別)、移動体50の車種、時間帯などのデータが訓練データとして機械学習モデルの訓練に用いられてもよい。
また、決定部13による第1移動体及び第2移動体の決定が機械学習モデルにより実行されてもよい。例えば、特定部12により特定された複数の移動体50の遠隔操縦に関する情報を訓練データとし、オペレータが選択した第1移動体及び第2移動体を正解データとして、機械学習モデルが訓練される。遠隔操縦に関する情報は、例えば(1)遠隔操縦地点から移動体50までの距離又は遠隔操縦地点への到着予定時刻、(2)遠隔操縦又は追従に関する移動体の適性、(3)自律移動及び遠隔操縦が可能か否かの操縦特性、遠隔操縦の履歴、移動体の乗員による手動操縦の要望有無、又は、遠隔管制システム10の管理対象の移動体50であるか否かの管理属性などである。さらに、関係データに加えて、オペレータ、移動体50の位置(又は位置の属する領域の種別)、移動体50の車種、時間帯などのデータが訓練データとして機械学習モデルの訓練に用いられてもよい。
なお、上記の機械学習モデルの代わりに、過去の履歴を用いた統計的手法に基づいて、特定部12による複数の移動体の特定及び決定部13による第1移動体及び第2移動体の決定が実行されてもよい。
このように、移動体50が遠隔操縦地点において遠隔操縦を要求するか否かを、自律移動及び遠隔操縦が可能か否かの操縦特性、遠隔操縦の履歴、移動体の乗員による手動操縦の要望有無、又は、管理対象の移動体50であるか否かの管理属性に基づいて推測することができる。
例えば、決定部13は、追従に関する移動体の適性、移動体50の追従を伴う遠隔操縦のためのオペレータのスキル若しくは経験、又は、移動時間、停止時間、移動速度及び移動範囲のうちの少なくとも1つの制約、に基づいて第2移動体を決定してもよい。
例えば、決定部13は、追従に関する移動体の適性が所定の条件を満たす移動体50を第2移動体として決定してもよい。具体的には、決定部13は、他の移動体50に追従するための機能を有している移動体50、他の移動体50に追従することができるようなサイズの移動体50(例えば第1移動体よりも小さい移動体50)、又は、位置若しくはセンシング範囲が他の移動体50に追従することができるようなセンサを有している移動体50を第2移動体として決定してもよい。例えば、所定の条件は、移動体50の現在位置に応じて異ならせてもよい。インフラ協調できる場所又は道路幅等に応じて必要な移動体の適性が異なってくるためである。
また、例えば、決定部13は、移動体50の追従を伴う遠隔操縦のためのオペレータのスキル若しくは経験が不十分である場合には、第2移動体の決定を行わなくてもよい。つまり、オペレータに対して第2移動体の追従を伴う第1移動体の遠隔操縦を行わせなくてもよい。他の移動体50の追従を伴う移動体50の遠隔操縦は、他の移動体50の追従を伴わない移動体50の遠隔操縦よりも難易度が高く、移動体50の追従を伴う遠隔操縦のためのオペレータのスキル若しくは経験が不十分である場合、安全性に問題が生じるおそれがあるためである。なお、決定部13は、オペレータに対して、移動体50の追従を伴う遠隔操縦のためのオペレータのスキル若しくは経験が十分か否かを問い合わせてもよい。
また、例えば、決定部13は、移動時間、停止時間、移動速度及び移動範囲のうちの少なくとも1つの制約を満たす移動体50を第2移動体として決定してもよい。例えば、決定部13は、サービスを提供中の移動体50(例えば乗客を乗せている旅客車両)を第2移動体として決定しなくてもよい。サービスを提供中の移動体50は、例えば、移動時間、停止時間、移動速度及び移動範囲のうちのいずれかについて制約が設けられている場合があり、このような移動体50が第2移動体に決定されると、制約を満たさない可能性があるためである。なお、サービスを提供中の移動体50であっても、移動時間、停止時間、移動速度及び移動範囲のうちの少なくとも1つの制約を満たす場合に、サービスの品質を維持できるときには、第2移動体として決定してもよい。同じように、決定部13は、移動時間、停止時間、移動速度及び移動範囲のうちの少なくとも1つの制約を満たす移動体50を第1移動体として決定してもよい。
このように、追従に関する移動体の適性が追従に適している移動体50、又は、移動時間、停止時間、移動速度及び移動範囲のうちの少なくとも1つの制約を満たしている移動体50を第2移動体として決定することができる。或いは、移動体50の追従を伴う遠隔操縦のためのオペレータのスキル若しくは経験が十分な場合に第2移動体を決定することができる。言い換えると、移動体50の追従を伴う遠隔操縦のためのオペレータのスキル若しくは経験が十分な場合には、第2移動体を決定しなくてもよい。
次に、提示部14は、遠隔操縦地点において第1移動体を遠隔操縦するようにオペレータに提示する(ステップS14)。ユースケース1及び2において、提示部14は、以下の機能を有していてもよい。
例えば、提示部14は、遠隔操縦に対する遠隔管制システム10(例えばオペレータ)の負荷が閾値以上若しくは余力が閾値未満である場合、又は、遠隔操縦の要因が移動に影響する移動体50における異常でない場合、第2移動体の追従を伴う第1移動体の遠隔操縦を実行すると決定し、遠隔操縦地点において第1移動体を遠隔操縦するようにオペレータに提示してもよい。例えば、遠隔管制システム10の負荷は、遠隔操縦のために要するオペレータ又は遠隔操縦装置の数又は割合であり、遠隔管制システム10の余力は、即時に遠隔操縦に対応可能なオペレータ又は遠隔操縦装置の数又は割合である。例えば、第2移動体の追従を伴う第1移動体の遠隔操縦では、第2移動体の追従を伴っているということもありオペレータは慎重に遠隔操縦を行うことが多いため、複数の移動体50の移動速度が全体的に遅くなり非効率になってしまう。これに対して、遠隔操縦に対するオペレータの負荷が閾値未満又は余力が閾値以上である場合には、オペレータに余裕があるため、第2移動体の追従を伴う第1移動体の遠隔操縦を実行せずに、複数の移動体50のそれぞれについて遠隔操縦を行うことができ、複数の移動体50を効率的に移動させることができる。また、遠隔操縦の要因が移動に影響する移動体50における異常(例えば、センサの故障、センサへの汚れの付着等)である場合、異常が発生した移動体50以外の移動体50は、遠隔操縦を必要としないため、第2移動体の追従を伴う第1移動体の遠隔操縦が不要となる。
例えば、提示部14は、第2移動体への追従の指示の後、オペレータによる第1移動体の遠隔操縦を許可してもよい。例えば、第2移動体の追従の準備が完了(例えば追従位置への移動が完了)するまで、第1移動体の遠隔操縦を開始できなくてもよく、提示部14は、第2移動体の追従の準備が完了した場合に、オペレータに遠隔操縦を許可する旨の提示を行ってもよい。これにより、第2移動体が第1移動体に追従する準備が完了する前に第1移動体の遠隔操縦が開始されてしまうことを抑制できる。例えば、第2移動体の追従の準備が完了したか否かは、車車間通信が確立したか否か、第1移動体に対する第2移動体の位置や向きの調整が完了したか否か、又は、遠隔操縦の追従動作用の第1移動体若しくは第2移動体のセンサの位置の調整が完了したか否か等に応じて判断されてもよい。また、例えば、遠隔操縦を開始する前に、第1移動体及び第2移動体のセンサの位置をオペレータに確認させた後に、遠隔操縦を許可してもよい。
例えば、提示部14は、第2移動体の追従を伴う第1移動体の遠隔操縦中は、第2移動体におけるセンサのセンシングデータ(又はその加工データ)を第2移動体から取得し、センシングデータをオペレータに提示してもよい。これにより、オペレータは、第1移動体に追従している第2移動体のセンシングデータを確認しながら(言い換えると第2移動体の周辺の状況を確認しながら)第2移動体の追従を伴う第1移動体の遠隔操縦を行うことができる。したがって、遠隔操縦される第1移動体に追従して直接的には遠隔操縦されない第2移動体の安全性を確保することができる。
例えば、提示部14は、第2移動体の追従を伴う第1移動体の遠隔操縦中は、第2移動体におけるセンサを制御するための操作インタフェースをオペレータに提供してもよい。これにより、オペレータは、第2移動体におけるセンサを制御して、第2移動体の周辺のうちの所望の領域の状況を確認しながら第2移動体の追従を伴う第1移動体の遠隔操縦を行うことができる。したがって、遠隔操縦される第1移動体に追従して直接的には遠隔操縦されない第2移動体の安全性を確保することができる。例えば、第2移動体におけるセンサを制御するための制御信号は、遠隔操縦システム20から第2移動体に直接送信されてもよいし、遠隔操縦システム20から第1移動体を経由して第2移動体に送信されてもよい。なお、第1移動体に追従するための第2移動体のセンサがオペレータに制御されると、第2移動体が第1移動体へ追従することが困難になるおそれがあるため、第2移動体の当該センサ以外のセンサのみがオペレータに制御されてもよい。或いは、追従が可能となる範囲(例えば第2移動体のセンサの移動範囲及び向きの範囲等)が制限された上で、第2移動体のセンサがオペレータに制御されてもよい。また、第2移動体の追従を伴う第1移動体の遠隔操縦が終了したときに(つまり、第2移動体が追従モードから自動運転モードに切り替わるときに)、センサの位置や向きが、追従モード前の自動運転モード時の状態に自動で戻るようにしてもよい。
例えば、提示部14は、第1移動体と第2移動体とで移動体の移動特性が異なる場合、第2移動体の追従を伴う第1移動体の遠隔操縦中は、オペレータによる第1移動体の遠隔操縦及び少なくとも第2移動体の移動特性に基づいて推測される第2移動体の移動軌跡を、オペレータに提示してもよい。例えば、第1移動体と第2移動体とで移動体の移動特性が異なる場合、第1移動体に追従する第2移動体の移動軌跡が、遠隔操縦される第1移動体の移動軌跡と異なる場合がある。特に、第2移動体のサイズが第1移動体のサイズよりも大きい場合に、第1移動体を遠隔操縦したときに第1移動体は障害物等に衝突しないように移動したとしても、第1移動体に追従する第2移動体が障害物等に衝突してしまうおそれがある。そこで、推測された第2移動体の移動軌跡がオペレータに提示される。例えば、第1移動体及び第2移動体のうち、車体サイズ(例えば車両の長さ)が大きい方に合わせて、移動経路のガイドが提示される。これにより、オペレータは第2移動体の移動軌跡も考慮して第1移動体の遠隔操縦をすることができ、第2移動体の安全性を確保することができる。
例えば、提示部14は、第2移動体の追従を伴う第1移動体の遠隔操縦中は、遠隔操縦地点、第1移動体の位置及び第2移動体の位置に基づいて、遠隔操縦の終了地点と第2移動体の位置との関係をオペレータに提示してもよい。これにより、オペレータは、第2移動体が遠隔操縦の終了地点を通過したのを確認した後に、第1移動体の遠隔操縦を終了することができる。このため、第2移動体が遠隔操縦の終了地点を通過する前に第2移動体の第1移動体への追従が解除されることを抑制でき、第2移動体の安全性を確保することができる。
例えば、提示部14は、過去に遠隔操縦地点で移動体50を遠隔操縦した履歴がある場合、当該履歴に基づいて遠隔操縦の終了地点を取得し、第2移動体が当該終了地点を通過するまで第1移動体の遠隔操縦を継続させるようオペレータに提示してもよい。例えば、第2移動体が当該終了地点を通過したときにその旨がオペレータに提示されてよい。また、例えば、第2移動体が当該終了地点を通過するまで、第1移動体の走行モードを遠隔操縦モードから自律走行モードへ変更することを許可しないようにしてもよい。また、提示部14は、遠隔操縦モードから自動移動モードへの切り替えを許可する地点を提示してもよい。なお、履歴がない場合、遠隔操縦モードから自動移動モードへの切り替える地点がオペレータによって設定されてもよい。
そして、指示部15は、第1移動体が遠隔操縦されている間は第1移動体を追従するように第2移動体に指示する(ステップS15)。例えば、遠隔管制システム10から第2移動体に自律走行モードから追従走行モードに切り替える指示が出されると、第2移動体は追従走行モードを開始し、オペレータが第1移動体を遠隔操縦モードから自律走行モードに切り替える指示を出したタイミングで、第2移動体は追従走行モードから自律走行モードに切り替えられる。これにより、遠隔操縦される第1移動体に第2移動体が追従して移動するため、オペレータは、提示された第1移動体を遠隔操縦するだけで、同一時間帯に遠隔操縦地点を通過する複数の移動体50を遠隔操縦地点においてまとめて移動させることができる。したがって、自律移動可能な複数の移動体50を同一時間帯に同一の地点において遠隔操縦するオペレータの負担を軽減できる。
例えば、ユースケース1では、指示部15は、第1移動体及び第2移動体の位置及び移動計画に基づいて、遠隔操縦の開始時点において第2移動体が第1移動体に後続するか否かを判定し、第2移動体が第1移動体に後続しない場合、第2移動体が第1移動体に後続するように第1移動体及び第2移動体の少なくとも一方の移動を指示してもよい。例えば、決定された第1移動体及び第2移動体の現在の位置及び現状の移動計画によっては、遠隔操縦の開始時点において第2移動体が第1移動体に後続していない場合がある。そこで、遠隔操縦の開始時点において第2移動体が第1移動体に後続しないと判定される場合には、指示部15は、第2移動体が第1移動体に後続するように第1移動体及び第2移動体の少なくとも一方の移動を指示することで、遠隔操縦の開始時点において第2移動体を第1移動体に後続させることができる。したがって、遠隔操縦の開始時点において、第2移動体を第1移動体に追従させながら第1移動体をオペレータに遠隔操縦させるモードに円滑に切り替えることができる。
このとき、指示部15は、移動時間、停止時間、移動速度及び移動範囲のうちの少なくとも1つの制約を取得し、少なくとも1つの制約にしたがって、第1移動体及び第2移動体の少なくとも一方の移動を指示してもよい。例えば、移動体50によっては、移動体50の移動計画等に応じた移動可能な移動時間及び停止可能な停止時間に関する制約があったり、移動体50の最高速度又は最低速度に関する制約があったり、移動体50が移動可能な移動範囲に関する制約があったりする。そこで、これらの制約にしたがって移動の指示が行われることで、これらの制約を守ったまま移動の指示を行うことができる。
また、ユースケース1及び2において、指示部15は、以下の機能を有していてもよい。
例えば、指示部15は、提示部14によって、第2移動体の追従を伴う第1移動体の遠隔操縦中に、第2移動体におけるセンサを制御するための操作インタフェースがオペレータに提供されているときに、操作インタフェースにおける操作に基づいてセンサの制御を指示してもよい。これにより、オペレータは、第2移動体におけるセンサを制御して、第2移動体の周辺のうちの所望の領域の状況を確認しながら第2移動体の追従を伴う第1移動体の遠隔操縦を行うことができる。したがって、遠隔操縦される第1移動体に追従して直接的には遠隔操縦されない第2移動体の安全性を確保することができる。
例えば、指示部15は、第2移動体の追従を伴う第1移動体の遠隔操縦が終了するまで、第1移動体の追従を継続するように第2移動体に指示してもよい。例えば、第1移動体がオペレータに遠隔操縦されている間に、第2移動体による第1移動体の追従が解除されると安全性に問題が生じるおそれがある。第1移動体がオペレータに遠隔操縦されているという状況は、第1移動体が自律移動することが難しい状況にあり、第1移動体に追従する第2移動体も第1移動体と同様に自律移動することが難しい状況にあるためである。このため、第1移動体の遠隔操縦が終了する前に第2移動体の第1移動体への追従が解除されることを抑制でき、第2移動体の安全性を確保することができる。
例えば、指示部15は、第1移動体が遠隔操縦の終了地点を通過したときに、遠隔操縦モードから自動移動モードに切り替えるように第1移動体に指示し、第2移動体が上記終了地点を通過したときに、追従モードから自動移動モードに切り替えるように第2移動体に指示してもよい。第1移動体及び第2移動体のそれぞれについて、上記終了地点を通過したときに自動で自動移動モードに切り替わり、オペレータによって遠隔操縦モードを自動移動モードに切り替える手間を省くことができ、オペレータの負担を軽減できる。なお、第1移動体のみが終了地点を通過し、第2移動体が終了地点を通過していない状況の場合、第2移動体が終了地点を通過するまでオペレータに第2移動体を監視させてもよい。
例えば、指示部15は、第2移動体が遠隔操縦の終了地点を通過した後も第1移動体と同じ移動経路を移動する場合には、第1移動体と同じ移動経路を移動する間、引き続き第1移動体を追従するように第2移動体に指示してもよい。
例えば、指示部15は、第2移動体の追従を伴う第1移動体の遠隔操縦中に、第1移動体又は第1移動体に追従する第2移動体にさらに追従できる新たな移動体50が検知された場合には、新たな移動体50に対して追従走行をさせるように指示してもよい。この場合、新たな移動体50の追従の準備が完了するまで、オペレータに第1移動体の遠隔操縦をいったん中断させて第1移動体を待機させてもよい。或いは、オペレータに新たな移動体50を第2移動体として追加してもよいかを問い合わせてもよい。
次に、予めわかっている遠隔操縦地点を取得するケースであるユースケース1における遠隔管制システム10の動作の具体例について説明する。
図5は、ユースケース1における遠隔管制システム10の動作の一例を示すフローチャートである。
まず、取得部11は、車両位置情報、運行情報及び遠隔操縦地点情報を取得する(ステップS21)。例えば、取得部11は、予めわかっている遠隔操縦地点を取得し、遠隔管制システム10が管理する複数の移動体50(以降車両ともいう)のうち当該遠隔操縦地点の周辺に存在する複数の車両の位置を取得し、当該複数の車両の運行情報(走行経路及び走行場所ごとの到達時刻等)を取得する。
次に、特定部12は、遠隔操縦地点を通過予定の複数の車両を特定し(ステップS22)、特定した車両毎に遠隔操縦地点への到着予定時刻を算出する(ステップS23)。例えば、特定部12は、車両位置情報、運行情報及び遠隔操縦地点情報から遠隔操縦地点を通過予定の複数の車両を特定し、特定した車両毎の到着予定時刻を算出することができる。例えば、特定部12は、走行方向が同じ複数の車両から遠隔操縦地点を通過予定の複数の車両を特定してもよい。
次に、特定部12は、遠隔操縦地点に同一時間帯に到着する車両が複数存在するか否かを判定する(ステップS24)。例えば、特定部12は、遠隔操縦地点を通過予定の複数の車両のそれぞれの到着予定時刻を比較して、到着予定時刻が同一の車両が複数存在するか否かを判定することで、遠隔操縦地点に同一時間帯に到着する車両が複数存在するか否かを判定してもよい。同一とみなす到着予定時刻の範囲(すなわち到着予定時刻に対して許容されるずれ)は、現在時刻から到着予定時刻までの時間が大きいほど大きくしてもよい。現在時刻から到着予定時刻までの時間が大きいほど実際の到着時刻と到着予定時刻との差が大きくなり得るためである。
なお、特定部12は、遠隔操縦地点を通過予定の複数の車両のそれぞれの現在位置から遠隔操縦地点までの残距離を比較して、残距離が同一の車両が複数存在するか否かを判定することで、遠隔操縦地点に同一時間帯に到着する車両が複数存在するか否かを判定してもよい。同一とみなす残距離の範囲(すなわち残距離に対して許容されるずれ)は、残距離が大きいほど大きくしてもよい。
また、特定部12は、遠隔操縦地点を通過予定の複数の車両のそれぞれの現在位置から遠隔操縦地点までの走行経路及び現在位置を比較して、走行経路が同一でかつ現在位置が同一の車両が複数存在するか否かを判定することで、遠隔操縦地点に同一時間帯に到着する車両が複数存在するか否かを判定してもよい。この場合には、到着予定時刻又は残距離を算出しなくても、当該判定を行うことができる。なお、到着予定時刻を比較する場合、又は、残距離を比較する場合には、現在位置又は走行経路が異なっている複数の車両の中から、遠隔操縦地点に同一時間帯に到着する車両を選択することができるというメリットがある。
遠隔操縦地点に同一時間帯に到着する車両が複数存在しない場合(ステップS24でNo)、処理が終了する。この場合、第2移動体の追従を伴う第1移動体の遠隔操縦(以下、追従付き遠隔操縦とも呼ぶ)が行われない。
遠隔操縦地点に同一時間帯に到着する車両が複数存在する場合(ステップS24でYes)、特定部12は、遠隔操縦地点に同一時間帯に到着する複数の車両を追従付き遠隔操縦のグループに決定する(ステップS25)。なお、特定部12は、追従付き遠隔操縦が行われることで目的地への到着が所定時間以上遅れ、これにより問題が生じるような車両(例えばサービスを提供中の車両)については、追従付き遠隔操縦のグループに含めなくてもよい。追従付き遠隔操縦が行われる場合、車両が停止したり減速したりして目的地への到着が遅れるおそれがあり、例えば乗客を乗せている旅客車両等の場合、サービスの品質が低下するおそれがあるためである。
次に、決定部13は、決定されたグループの中で到着予定時刻が最も早い車両を遠隔操縦対象車両に決定する(ステップS26)。遠隔操縦対象車両は、第1移動体の一例である。なお、決定部13は、決定されたグループの中で、現在位置が遠隔操縦地点から最も近い車両を遠隔操縦対象車両に決定してもよい。或いは、決定部13は、図3に示されるような追従可能移動体情報に基づいて、遠隔操縦対象車両を決定してもよい。
次に、決定部13は、決定されたグループの中で遠隔操縦対象車両以外の車両を追従車両に決定する(ステップS27)。追従車両は、第2移動体の一例である。例えば、決定部13は、到着予定時刻が最も早い車両を遠隔操縦対象車両に決定した場合、到着予定時刻が最も早い車両以外の車両を追従車両に決定し、現在位置が遠隔操縦地点から最も近い車両を遠隔操縦対象車両に決定した場合、現在位置が遠隔操縦地点から最も近い車両以外の車両を追従車両に決定する。或いは、決定部13は、追従可能移動体情報に基づいて決定した遠隔操縦対象車両以外の車両を追従車両に決定してもよい。
なお、同一時間帯に遠隔操縦地点に到着する車両が3台以上存在する場合、追従車両は2台以上存在することになるため、例えば、決定部13は、2台以上の追従車両の中でも追従の順序を決定してもよい。
決定部13が、追従可能移動体情報に基づいて、遠隔操縦対象車両及び追従車両を決定した場合、言い換えると、到着予定時刻又は位置を考慮せずに遠隔操縦対象車両及び追従車両を決定した場合には、遠隔操縦対象車両の現在位置が追従車両の現在位置よりも後方に位置する場合がある。或いは、決定部13が、到着予定時刻が最も早い車両又は現在位置が遠隔操縦地点から最も近い車両を遠隔操縦対象車両に決定し、それら以外の車両を追従車両に決定した場合であっても、必ずしも遠隔操縦対象車両の現在位置が追従車両の現在位置よりも前方に位置するとは限らない。
そこで、指示部15は、追従車両が遠隔操縦対象車両の後続車両であるか否かを判定する(ステップS28)。例えば、追従車両が遠隔操縦対象車両から後方に向かって所定距離内に存在するか否かが判定されることで、追従車両が遠隔操縦対象車両の後続車両であるか否かの判定が行われてもよい。追従車両が遠隔操縦対象車両から後方に向かって所定距離内に存在するか否かは、遠隔操縦対象車両又は追従車両が有するセンサのセンシングデータに基づいて判定されてもよいし、GPS(Global Positioning System)データに基づいて判定されてもよい。
追従車両が遠隔操縦対象車両の後続車両でない場合(ステップS28でNo)、指示部15は、追従車両が遠隔操縦対象車両の後続車両になるように、遠隔操縦対象車両及び追従車両の少なくとも一方の車両の走行制御を行う(ステップS29)。例えば、追従車両の速度を下げる若しくは停止する走行制御、又は、遠隔操縦対象車両の速度を上げる走行制御が行われる。或いは、追従車両の速度を下げる若しくは停止する走行制御、及び、遠隔操縦対象車両の速度を上げる走行制御の両方が行われる。なお、停止する走行制御は、例えば、路上駐車できるエリアがある場合に行われてもよい。また、追従車両が遠隔操縦対象車両の後方に位置する場合であっても、遠隔操縦対象車両と追従車両との距離が大きい場合もある。この場合、遠隔操縦対象車両の速度を下げる若しくは停止する走行制御、又は、追従車両の速度を上げる走行制御が行われる。また、追従車両が遠隔操縦対象車両の後方に位置する場合であっても、遠隔操縦対象車両と追従車両との間に他車両が存在する場合もある。この場合、遠隔操縦対象車両の速度を下げる若しくは停止する走行制御、又は、追従車両の速度を上げて他車両を追い越す走行制御が行われる。なお、追い越す走行制御は、例えば、追い越しができるエリア(例えば追い越し車線等)がある場合に行われてもよい。
例えば、遠隔操縦対象車両について減速又は停止等の走行制御が行われる場合、乗員の運送等のサービスの品質が低下するおそれがある。そこでサービスの品質の低下を抑制するために、遠隔操縦対象車両について、減速又は停止等の走行制御以外の制御が行われてもよい。例えば、目的地までの走行経路が変更されて、より早く目的地に到着するような走行経路が選択されてもよい。
なお、決定部13は、決定した遠隔操縦対象車両及び追従車両が遠隔操縦地点まで走行している途中に、逐次変化する各車両の位置、到着予定時刻又は残距離等に応じて、遠隔操縦対象車両及び追従車両の割り当てを変更してもよい。例えば、決定部13は、すでに決定した遠隔操縦対象車両及び追従車両が遠隔操縦地点まで走行している途中に、遠隔操縦対象車両の前方に追従車両が位置することになった場合には、すでに決定した追従車両を遠隔操縦対象車両に決定し直し、すでに決定した遠隔操縦対象車両を追従車両に決定し直してもよい。
また、決定部13は、決定した遠隔操縦対象車両及び追従車両が遠隔操縦地点まで走行している途中に、遠隔操縦地点に同一時間帯に到着しないと予測される車両(例えば現在の到着予定時刻と当初の到着予定時刻との差が大きくなった車両)が発生した場合、当該車両を追従付き遠隔操縦のグループから外してもよい。例えば当該車両が遠隔操縦対象車両の場合には、追従付き遠隔操縦がキャンセルされてもよい。或いは、再度、遠隔操縦地点に同一時間帯に到着する複数の車両が新たなグループとして決定されてもよい。
追従車両が遠隔操縦対象車両の後続車両である場合(ステップS28でYes)、又は、ステップS29で遠隔操縦対象車両及び追従車両の少なくとも一方の車両の走行制御が行われ、追従車両が遠隔操縦対象車両の後続車両となった場合、提示部14は、追従付き遠隔操縦をオペレータに提示し(ステップS30)、指示部15は、遠隔操縦対象車両を追従して走行するように追従車両に指示する(ステップS31)。これにより、遠隔操縦される遠隔操縦対象車両に追従車両が追従して走行するため、オペレータは、提示された遠隔操縦対象車両を遠隔操縦するだけで、同一時間帯に遠隔操縦地点を通過する遠隔操縦対象車両及び追従車両を遠隔操縦地点においてまとめて走行させることができる。したがって、自律走行可能な複数の車両を同一時間帯に同一の地点において遠隔操縦するオペレータの負担を軽減できる。
なお、追従付き遠隔操縦がオペレータに提示される前に、遠隔操縦対象車両を追従して走行するように追従車両に指示が行われてもよい。これについて、図6を用いて説明する。
図6は、追従走行を開始するタイミングを説明するための図である。図6において、車両50aを遠隔操縦対象車両とし、車両50bを追従車両とする。また、経路R1を車両50aの走行経路とし、経路R2を車両50bの走行経路とする。
例えば、車両50aがエリアA1を走行するときに、車両50bが車両50aの後続車両であると判定されたとする。例えば、このタイミングで、車両50bを自動運転モードから追従走行モードに切り替えることもできる。しかし、車両50aと車両50bとでその後の走行経路が経路R1及び経路R2のように異なっている場合、エリアA2において車両50bの追従走行モードをいったん解除して自動運転モードに戻すことになり、非効率的である。そこで、指示部15は、車両50bが車両50aの後続車両であると判定し、かつ、車両50b及び50aが遠隔操縦地点までの経路が同一となるエリアA3を走行していると判定した場合に、車両50aを追従して走行するように車両50bに指示してもよい。
このように、指示部15は、追従車両が、遠隔操縦対象車両の後続車両であると判定し、かつ、遠隔操縦地点までの経路が同一となるエリアを追従車両と遠隔操縦対象車両とが走行していると判定した場合に、遠隔操縦対象車両を追従して走行するように追従車両に指示してもよい。なお、追従車両がサービスの提供中であって、途中で乗員の乗車又は降車のために停車する場合もあり、この場合にも追従車両の追従走行モードをいったん解除して自動運転モードに戻すことになる。このため、指示部15は、さらに、追従車両が遠隔操縦地点までの走行途中に乗員の乗降のために停車することがないと判定した場合に、遠隔操縦対象車両を追従して走行するように追従車両に指示してもよい。
次に、遠隔操縦を要求する移動体50が位置する地点を遠隔操縦地点として取得するケースであるユースケース2における遠隔管制システム10の動作の具体例について説明する。
図7は、ユースケース2における全体システムの動作の一例を示すシーケンス図である。図7において、遠隔操縦を要求する移動体50を車両50aとし、車両50aの周辺の移動体50(具体的には車両50aの後続車両)を車両50bとする。車両50aは、第1移動体に決定される車両の一例であり、車両50bは、第2移動体に決定される車両の一例である。
例えば、車両50aにおいて所定のイベントが発生したとする。所定のイベントは、例えば、車両50aに遠隔操縦を要求させるようなイベントであり、車両50aがスタックしたり、車両50aが車両50a自身の判断で自動走行を続けることが不可能になったりするようなイベントである。具体的には、工事で人が交通整理をしている場合、交通量の多い道路に合流する場合、人通りの多い横断歩道を通過する場合、又は、中央車線を越えて移動する場合等が所定のイベントとなる。
車両50aは、所定のイベントが発生したため、遠隔操縦を遠隔管制システム10に要求する(ステップS41)。
遠隔管制システム10は、遠隔操縦の要求を受信した場合、遠隔操縦を要求した車両50aの後方に後続車両が存在するか否かを判断する(ステップS42)。
遠隔管制システム10は、車両50aの後方に後続車両(例えば車両50b)が存在すると判断した場合、車両50bが遠隔操縦を要する車両かどうかを判断する(ステップS43)。
遠隔管制システム10は、車両50bが遠隔操縦を要する車両であると判断した場合、車両50bの追従を伴う車両50aの追従付き遠隔操縦を遠隔操縦システム20(すなわちオペレータ)に提示する(ステップS44)。
また、遠隔管制システム10は、車両50bが遠隔操縦を要する車両であると判断した場合、車両50aを追従するように車両50bに指示する(ステップS45)。
そして、車両50bは、追従走行モードに切り替わり、車両50aへの追従走行の準備が完了した旨を遠隔操縦システム20に通知し、遠隔操縦システム20は、車両50aの遠隔操縦を開始する。その後、例えば、車両50bが遠隔操縦の終了地点を通過した後に、遠隔操縦システム20は、遠隔操縦を終了する旨を車両50a及び50bに通知し、車両50a及び50bは自動運転モードに切り替わる。
次に、ユースケース2における遠隔管制システム10の動作の具体例について、図8を用いて説明する。
図8は、ユースケース2における遠隔管制システム10の動作の一例を示すフローチャートである。
まず、遠隔管制システム10は、移動体50(例えば車両50aとする)から遠隔操縦の要求を受信する(ステップS51)。これにより、取得部11は、遠隔操縦を要求した車両50aが位置する地点である遠隔操縦地点を取得する。
次に、特定部12は、遠隔操縦を要求した車両50aに後続車両が存在するか否かを判定する(ステップS52)。例えば、特定部12は、車両50aの後方のセンシングデータに基づいて、後続車両の存否を判定してもよい。例えば、特定部12は、車両50aと車両50aの後方の車両との距離が所定距離(例えば5m等)以内の場合、当該後方の車両を後続車両と判定してもよい。なお、車両50aと車両50aの後方の車両との距離が所定距離以内であっても、車両50aと車両50aの後方の車両との間に信号機がある場合、特定部12は、車両50aの後方の車両を後続車両と判定しなくてもよい。このとき、特定部12は、信号機の状態を考慮してもよく、車両50aと車両50aの後方の車両との間に信号機がある場合に、信号機が青を示すときには車両50aの後方の車両を後続車両と判定してもよく、信号機が赤を示すときには車両50aの後方の車両を後続車両と判定しなくてもよい。なお、車両50aと車両50aの後方の車両との距離が所定距離よりも大きい場合、当該距離が所定距離以内になるように車両50aは待機してもよい。待機時間は特に限定されないが、他の交通の妨げとなるおそれがあるため、待機時間は短く設定されてもよい。或いは、他の交通の妨げになると判定される場合には、車両50aは待機しないようにしてもよい。また、待機することでサービスの品質が低下するおそれがある場合には、車両50aは待機しないようにしてもよい。
車両50aに後続車両(例えば車両50bとする)が存在する場合、特定部12は、車両50a及び50bを、同一時間帯に遠隔操縦地点を通過する複数の移動体50と特定する。言い換えると、特定部12は、車両50a及び50bを追従付き遠隔操縦のグループとして決定する。なお、ここでは、後続車両が存在するか否かが車両50aのセンシングデータに基づいて判定され、すなわち、追従付き遠隔操縦のグループが車両50aのセンシングデータに基づいて決定される例について説明したが、車両50aからの遠隔操縦の要求が発生したときの遠隔管制システム10が管理する各車両の位置情報、運行情報及び車両情報等が用いられて、当該グループが決定されてもよい。
車両50aに後続車両(車両50b)が存在する場合(ステップS52でYes)、決定部13は、後続車両(車両50b)は遠隔操縦を要する車両であるか否かを判定する(ステップS53)。
例えば、車両50bが自動運転車両であるか否かを判定することで、車両50bが遠隔操縦を要する車両であるか否かを判定することができる。自動運転車両である車両50aが遠隔操縦を要求したということは、車両50aの後方を走行する自動運転車両である車両50bも遠隔操縦を要することになると考えられるためである。
例えば、車両50aのセンサから得られる画像を画像認識することで、車両50bが自動運転車両であるか否かが判定されてもよい。例えば、画像に写る車両の外観から自動運転車両特有の特徴が抽出された場合、ナンバープレートに自動運転車両か否かを示す情報が付されているという前提において画像に写るナンバープレートが自動運転車両を示す場合、又は、画像にドライバが写っていない場合等に、車両50bが自動運転車両であると判定することができる。
また、例えば、車両50bの位置情報から車両50bが自動運転車両か否かが判定されてもよい。例えば、遠隔管制システム10が自身の管理対象の全ての自動運転車両の現在位置情報を把握している場合に、車両50bの現在位置が、遠隔管制システム10が管理する全ての自動運転車両の現在位置のうちのいずれかと合致するときには、車両50bが自動運転車両であると判定することができる。
また、例えば、車両50aが車車間通信によって車両50bが自動運転車両であるか否かを車両50bに対して問い合わせることで、車両50bが自動運転車両であるか否かが判定されてもよい。
例えば、車両50b(或いは車両50bと同じ車種の車両)が過去に同じ遠隔操縦地点において遠隔操縦された実績がある場合には、車両50bが遠隔操縦を要する車両であると判定されてもよい。
例えば、車両50bがレベル3の自動運転車両である場合には、車両50bのドライバに追従走行モードに切り替えるか手動運転をするかが問い合わせられてもよく、ドライバが追従走行に切り替えることを選択した場合に、車両50bが遠隔操縦を要する車両であると判定されてもよい。
例えば、遠隔管制システム10が車両50bに対して追従走行の指示を行うことが可能な場合に、車両50bが遠隔操縦を要する車両であると判定されてもよい。車両50bが車両50aを管理する遠隔管制システム10とは別のシステムによって管理されている場合には、遠隔管制システム10は、車両50bに対して追従走行の指示を行うことができないためである。
車両50bが遠隔操縦を要する車両である場合、決定部13は、車両50aを遠隔操縦対象車両(すなわち第1移動体)に決定し、車両50bを追従車両(すなわち第2移動体)に決定する。なお、遠隔操縦を要求した車両50aが追従車両に決定され、車両50bが遠隔操縦対象車両に決定されてもよい。この場合、車両50aが車両50bの後続車両となるように車両50a及び50bの少なくとも一方が走行制御されてもよい。
車両50bが遠隔操縦を要する車両である場合(ステップS53でYes)、提示部14は、車両50aの追従付き遠隔操縦をオペレータに提示し(ステップS54)、指示部15は、遠隔操縦を要求した車両50aを追従して走行するように後続車両(車両50b)に指示する(ステップS55)。これにより、遠隔操縦される車両50aに車両50bが追従して移動するため、オペレータは、提示された車両50aを遠隔操縦するだけで、同一時間帯に遠隔操縦地点を通過する車両50a及び50bを遠隔操縦地点においてまとめて走行させることができる。したがって、自律移動可能な複数の車両を同一時間帯に同一の地点において遠隔操縦するオペレータの負担を軽減できる。
一方で、車両50aに後続車両が存在しない場合(ステップS52でNo)、又は、車両50bが遠隔操縦を要する車両でない場合(ステップS53でNo)、提示部14は、通常の遠隔操縦をオペレータに提示する(ステップS56)。この場合、オペレータは、他の車両が追従していない車両50aを遠隔操縦することになる。
(その他の実施の形態)
以上、本開示の一つ又は複数の態様に係る情報処理方法及び情報処理システム(遠隔管制システム10)について、実施の形態に基づいて説明したが、本開示は、これらの実施の形態に限定されるものではない。本開示の趣旨を逸脱しない限り、当業者が思いつく各種変形を各実施の形態に施したものや、異なる実施の形態における構成要素を組み合わせて構築される形態も、本開示の一つ又は複数の態様の範囲内に含まれてもよい。
以上、本開示の一つ又は複数の態様に係る情報処理方法及び情報処理システム(遠隔管制システム10)について、実施の形態に基づいて説明したが、本開示は、これらの実施の形態に限定されるものではない。本開示の趣旨を逸脱しない限り、当業者が思いつく各種変形を各実施の形態に施したものや、異なる実施の形態における構成要素を組み合わせて構築される形態も、本開示の一つ又は複数の態様の範囲内に含まれてもよい。
例えば、上記実施の形態では、自律移動している移動体50が遠隔操縦地点において遠隔操縦を要する場合に、追従付き遠隔操縦が行われる例について説明したが、自律移動している移動体50が遠隔操縦地点において手動運転を要する場合に、追従付き遠隔操縦が行われてもよい。これにより、移動体50の乗員が遠隔操縦地点において手動運転をする手間を省くことができる。
例えば、上記実施の形態では、第2移動体が第1移動体に追従する例について説明したが、追従の代わりに牽引が行われてもよいし、追従と牽引とが組み合わせられてもよい。
例えば、第2移動体が遠隔監視オペレータによる遠隔監視対象として設定されてもよい。例えば、第2移動体が遠隔監視システムにおける監視対象として設定され、遠隔監視オペレータに監視される。さらに、特定の条件を満たす場合に、第2移動体が遠隔監視対象として設定されてもよい。特定の条件は、例えば、遠隔操縦地点が見通しの悪い場所であること、遠隔操縦地点及びその周辺における人や駐車車両などの障害物の数又は密度が閾値以上であること、遠隔操縦地点の交通量が閾値以上であること、遠隔操縦地点が過去に追従付き遠隔操縦が行われたことがない地点であること、追従付き遠隔操縦の時間帯が夕方又は夜間であること、遠隔操縦オペレータの追従付き遠隔操縦のスキル又は経験が閾値以下であること、複数の第2移動体が選択されること、などである。特定の条件の判定は、第1移動体、第2移動体、若しくはインフラのセンサから得られたセンシング情報又は外部装置から収集した情報(例えば、地図情報、交通情報、天候情報)に基づき実行されてもよい。なお、遠隔監視オペレータは第1移動体の遠隔操縦オペレータとは別のオペレータである。
また、第2移動体の監視優先度が他の監視対象よりも高く設定されてもよい。さらに、特定の条件を満たす第2移動体の監視優先度が高く設定されてもよい。特定の条件は、例えば、遠隔操縦地点が見通しの悪い場所であること、遠隔操縦地点及びその周辺における人や駐車車両などの障害物の数又は密度が閾値以上であること、遠隔操縦地点の交通量が閾値以上であること、遠隔操縦地点が過去に追従付き遠隔操縦が行われたことがない地点であること、追従付き遠隔操縦の時間帯が夕方又は夜間であること、遠隔操縦オペレータの追従付き遠隔操縦のスキル又は経験が閾値以下であること、複数の第2移動体が選択されること、などである。
また、第2移動体に対する緊急停止操作の権限が遠隔監視オペレータに付与されてもよい。なお、遠隔監視オペレータにより第2移動体が緊急停止されると、第1移動体の遠隔操縦が解除され、又は遠隔操縦の解除が遠隔操縦オペレータに提案されてもよい。さらに、第2移動体の緊急停止が遠隔操縦オペレータに通知されてもよい。
また、第2移動体が監視されていない状態では第1移動体の遠隔操縦を許可しない、という制御が追加されてもよい。例えば、第2移動体が遠隔監視対象として設定されない限り、第1移動体の遠隔操縦を許可されない。あるいは、遠隔監視オペレータが第2移動体を監視しているか否かを判定し、監視していると判定された場合のみ、第1移動体の遠隔操縦が許可されるとしてもよい。
例えば、本開示は、情報処理方法に含まれるステップを、プロセッサに実行させるためのプログラムとして実現できる。さらに、本開示は、そのプログラムを記録したCD-ROM等である非一時的なコンピュータ読み取り可能な記録媒体として実現できる。
例えば、本開示が、プログラム(ソフトウェア)で実現される場合には、コンピュータのCPU、メモリ及び入出力回路等のハードウェア資源を利用してプログラムが実行されることによって、各ステップが実行される。つまり、CPUがデータをメモリ又は入出力回路等から取得して演算したり、演算結果をメモリ又は入出力回路等に出力したりすることによって、各ステップが実行される。
なお、上記実施の形態において、情報処理システムに含まれる各構成要素は、専用のハードウェアで構成されるか、各構成要素に適したソフトウェアプログラムを実行することによって実現されてもよい。各構成要素は、CPU又はプロセッサなどのプログラム実行部が、ハードディスク又は半導体メモリなどの記録媒体に記録されたソフトウェアプログラムを読み出して実行することによって実現されてもよい。
上記実施の形態に係る情報処理システムの機能の一部又は全ては典型的には集積回路であるLSIとして実現される。これらは個別に1チップ化されてもよいし、一部又は全てを含むように1チップ化されてもよい。また、集積回路化はLSIに限るものではなく、専用回路又は汎用プロセッサで実現してもよい。LSI製造後にプログラムすることが可能なFPGA(Field Programmable Gate Array)、又はLSI内部の回路セルの接続や設定を再構成可能なリコンフィギュラブル・プロセッサを利用してもよい。
さらに、本開示の主旨を逸脱しない限り、本開示の各実施の形態に対して当業者が思いつく範囲内の変更を施した各種変形例も本開示に含まれる。
本開示は、自動運転及び遠隔操縦が可能な自動運転車両等に適用できる。
10 遠隔管制システム
11 取得部
12 特定部
13 決定部
14 提示部
15 指示部
16 記憶部
20 遠隔操縦システム
50 移動体
50a、50b 車両
A1、A2、A3 エリア
R1、R2 経路
11 取得部
12 特定部
13 決定部
14 提示部
15 指示部
16 記憶部
20 遠隔操縦システム
50 移動体
50a、50b 車両
A1、A2、A3 エリア
R1、R2 経路
Claims (18)
- コンピュータにより実行される情報処理方法であって、
自律移動、及び移動のための遠隔操縦が可能な移動体の遠隔操縦が行われる地点である遠隔操縦地点を取得し、
少なくとも1つの移動体の位置に基づいて、同一時間帯に前記遠隔操縦地点を通過する複数の移動体を特定し、
特定した前記複数の移動体のうちから遠隔操縦する第1移動体、及び前記第1移動体を追従する第2移動体を決定し、
前記遠隔操縦地点において前記第1移動体を遠隔操縦するようにオペレータに提示し、
前記第1移動体が遠隔操縦されている間は前記第1移動体を追従するように前記第2移動体に指示する
情報処理方法。 - 前記複数の移動体の特定では、
前記少なくとも1つの移動体の移動計画を取得し、
前記少なくとも1つの移動体の位置及び移動計画に基づいて前記複数の移動体を特定する
請求項1に記載の情報処理方法。 - 前記第1移動体及び前記第2移動体の決定では、
前記複数の移動体の位置及び移動計画を取得し、
前記複数の移動体の位置及び移動計画に基づいて、前記複数の移動体のうちの最も早く前記遠隔操縦地点に到達する移動体を前記第1移動体として決定し、他の移動体を前記第2移動体として決定する
請求項2に記載の情報処理方法。 - 前記第1移動体及び前記第2移動体の決定では、
前記複数の移動体の遠隔操縦又は追従に関する移動体の適性を取得し、
前記適性に基づいて、
前記複数の移動体から遠隔操縦に適した移動体を前記第1移動体として決定し、他の移動体を前記第2移動体として決定する、又は、
前記複数の移動体から追従に適した移動体を前記第2移動体として決定し、他の移動体を前記第1移動体として決定する、又は、
前記複数の移動体から遠隔操縦に適していない移動体を前記第2移動体として決定し、他の移動体を前記第1移動体として決定する、又は、
前記複数の移動体から追従に適していない移動体を前記第1移動体として決定し、他の移動体を前記第2移動体として決定する
請求項2に記載の情報処理方法。 - さらに、
前記第1移動体及び前記第2移動体の位置及び移動計画に基づいて、遠隔操縦の開始時点において前記第2移動体が前記第1移動体に後続するか否かを判定し、
前記第2移動体が前記第1移動体に後続しない場合、前記第2移動体が前記第1移動体に後続するように前記第1移動体及び前記第2移動体の少なくとも一方の移動を指示する
請求項2~4のいずれか1項に記載の情報処理方法。 - 前記移動の指示では、
移動時間、停止時間、移動速度及び移動範囲のうちの少なくとも1つの制約を取得し、
前記少なくとも1つの制約にしたがって、前記第1移動体及び前記第2移動体の少なくとも一方の移動を指示する
請求項5に記載の情報処理方法。 - 前記遠隔操縦地点は、遠隔操縦を要求する移動体が位置する地点であり、
前記複数の移動体の特定では、
前記少なくとも1つの移動体の位置として、遠隔操縦を要求する移動体の位置、及び当該移動体の周辺の移動体の位置に基づいて前記複数の移動体を特定する
請求項1に記載の情報処理方法。 - 前記第2移動体の決定では、前記遠隔操縦地点において遠隔操縦を要求する移動体を前記第2移動体として決定する
請求項1~7のいずれか1項に記載の情報処理方法。 - 前記第2移動体の決定では、自律移動及び遠隔操縦が可能か否かの操縦特性、遠隔操縦の履歴、移動体の乗員による手動操縦の要望有無、又は、管理対象の移動体であるか否かの管理属性、に基づいて、前記遠隔操縦地点において遠隔操縦を要求すると推測される移動体を前記第2移動体として決定する
請求項8に記載の情報処理方法。 - 前記第2移動体の決定では、追従に関する移動体の適性、移動体の追従を伴う遠隔操縦のためのオペレータのスキル若しくは経験、又は、移動時間、停止時間、移動速度及び移動範囲のうちの少なくとも1つの制約、に基づいて前記第2移動体を決定する
請求項1~9のいずれか1項に記載の情報処理方法。 - 前記提示では、さらに、遠隔操縦に対するオペレータの負荷が閾値以上若しくは余力が閾値未満である場合、又は、遠隔操縦の要因が移動に影響する移動体における異常でない場合、前記第2移動体の追従を伴う前記第1移動体の遠隔操縦を実行すると決定する
請求項1~10のいずれか1項に記載の情報処理方法。 - 前記提示では、さらに、前記第2移動体への追従の指示の後、オペレータによる前記第1移動体の遠隔操縦を許可する
請求項1~11のいずれか1項に記載の情報処理方法。 - 前記提示では、さらに、前記第2移動体の追従を伴う前記第1移動体の遠隔操縦中は、前記第2移動体におけるセンサのセンシングデータを前記第2移動体から取得し、前記センシングデータをオペレータに提示する
請求項1~12のいずれか1項に記載の情報処理方法。 - 前記提示では、さらに、前記第2移動体の追従を伴う前記第1移動体の遠隔操縦中は、前記第2移動体におけるセンサを制御するための操作インタフェースをオペレータに提供し、
前記第2移動体への追従の指示では、さらに、前記操作インタフェースにおける操作に基づいて前記センサの制御を指示する
請求項1~13のいずれか1項に記載の情報処理方法。 - 前記提示では、さらに、前記第1移動体と前記第2移動体とで移動体の移動特性が異なる場合、前記第2移動体の追従を伴う前記第1移動体の遠隔操縦中は、オペレータによる前記第1移動体の遠隔操縦及び少なくとも前記第2移動体の移動特性に基づいて推測される前記第2移動体の移動軌跡を、オペレータに提示する
請求項1~14のいずれか1項に記載の情報処理方法。 - 前記第2移動体への追従の指示では、前記第2移動体の追従を伴う前記第1移動体の遠隔操縦が終了するまで、前記第1移動体の追従を継続するように前記第2移動体に指示する
請求項1~15のいずれか1項に記載の情報処理方法。 - 前記提示では、さらに、前記第2移動体の追従を伴う前記第1移動体の遠隔操縦中は、前記遠隔操縦地点、前記第1移動体の位置及び前記第2移動体の位置に基づいて、遠隔操縦の終了地点と前記第2移動体の位置との関係をオペレータに提示する
請求項1~16のいずれか1項に記載の情報処理方法。 - 自律移動、及び移動のための遠隔操縦が可能な移動体の遠隔操縦が行われる地点である遠隔操縦地点を取得する取得部と、
少なくとも1つの移動体の位置に基づいて、同一時間帯に前記遠隔操縦地点を通過する複数の移動体を特定する特定部と、
特定された前記複数の移動体のうちから遠隔操縦する第1移動体、及び前記第1移動体を追従する第2移動体を決定する決定部と、
前記遠隔操縦地点において前記第1移動体を遠隔操縦するようにオペレータに提示する提示部と、
前記第1移動体が遠隔操縦されている間は前記第1移動体を追従するように前記第2移動体に指示する指示部と、を備える
情報処理システム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202180007933.1A CN114930417A (zh) | 2020-07-15 | 2021-05-26 | 信息处理方法以及信息处理系统 |
| JP2022536163A JPWO2022014174A1 (ja) | 2020-07-15 | 2021-05-26 | |
| EP21842699.7A EP4184471A4 (en) | 2020-07-15 | 2021-05-26 | INFORMATION PROCESSING METHOD AND INFORMATION PROCESSING SYSTEM |
| US17/850,280 US20220326706A1 (en) | 2020-07-15 | 2022-06-27 | Information processing method and information processing system |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020121355 | 2020-07-15 | ||
| JP2020-121355 | 2020-07-15 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US17/850,280 Continuation US20220326706A1 (en) | 2020-07-15 | 2022-06-27 | Information processing method and information processing system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022014174A1 true WO2022014174A1 (ja) | 2022-01-20 |
Family
ID=79555168
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/020092 WO2022014174A1 (ja) | 2020-07-15 | 2021-05-26 | 情報処理方法及び情報処理システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20220326706A1 (ja) |
| EP (1) | EP4184471A4 (ja) |
| JP (1) | JPWO2022014174A1 (ja) |
| CN (1) | CN114930417A (ja) |
| WO (1) | WO2022014174A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023145709A1 (ja) * | 2022-01-28 | 2023-08-03 | パナソニックIpマネジメント株式会社 | 情報出力方法、情報出力装置及びプログラム |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6319507B2 (ja) | 1979-06-18 | 1988-04-22 | Mitsui Toatsu Chemicals | |
| JP2009018621A (ja) * | 2007-07-10 | 2009-01-29 | Toyota Motor Corp | 走行制御装置及びこれを用いた輸送システム |
| JP2015191254A (ja) * | 2014-03-27 | 2015-11-02 | 日本電気株式会社 | 無人航空機、無人航空機の制御方法、および、管制システム |
| JP2016081122A (ja) * | 2014-10-10 | 2016-05-16 | 株式会社Ihiエアロスペース | 遠隔操縦システムと遠隔操縦方法 |
| JP6319507B1 (ja) * | 2017-12-08 | 2018-05-09 | トヨタ自動車株式会社 | 車両の遠隔操作システム |
| JP2020047225A (ja) * | 2018-09-21 | 2020-03-26 | Hapsモバイル株式会社 | システム及び管理装置 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10481600B2 (en) * | 2017-09-15 | 2019-11-19 | GM Global Technology Operations LLC | Systems and methods for collaboration between autonomous vehicles |
-
2021
- 2021-05-26 WO PCT/JP2021/020092 patent/WO2022014174A1/ja unknown
- 2021-05-26 JP JP2022536163A patent/JPWO2022014174A1/ja active Pending
- 2021-05-26 EP EP21842699.7A patent/EP4184471A4/en active Pending
- 2021-05-26 CN CN202180007933.1A patent/CN114930417A/zh active Pending
-
2022
- 2022-06-27 US US17/850,280 patent/US20220326706A1/en active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6319507B2 (ja) | 1979-06-18 | 1988-04-22 | Mitsui Toatsu Chemicals | |
| JP2009018621A (ja) * | 2007-07-10 | 2009-01-29 | Toyota Motor Corp | 走行制御装置及びこれを用いた輸送システム |
| JP2015191254A (ja) * | 2014-03-27 | 2015-11-02 | 日本電気株式会社 | 無人航空機、無人航空機の制御方法、および、管制システム |
| JP2016081122A (ja) * | 2014-10-10 | 2016-05-16 | 株式会社Ihiエアロスペース | 遠隔操縦システムと遠隔操縦方法 |
| JP6319507B1 (ja) * | 2017-12-08 | 2018-05-09 | トヨタ自動車株式会社 | 車両の遠隔操作システム |
| JP2020047225A (ja) * | 2018-09-21 | 2020-03-26 | Hapsモバイル株式会社 | システム及び管理装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4184471A4 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023145709A1 (ja) * | 2022-01-28 | 2023-08-03 | パナソニックIpマネジメント株式会社 | 情報出力方法、情報出力装置及びプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4184471A1 (en) | 2023-05-24 |
| JPWO2022014174A1 (ja) | 2022-01-20 |
| CN114930417A (zh) | 2022-08-19 |
| EP4184471A4 (en) | 2023-12-06 |
| US20220326706A1 (en) | 2022-10-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11567514B2 (en) | Autonomous and user controlled vehicle summon to a target | |
| JP7005526B2 (ja) | 隊列走行コントローラの状態マシン | |
| US10303173B2 (en) | Facilitating rider pick-up for a self-driving vehicle | |
| RU2761270C2 (ru) | Система и способ для предоставления транспортировки | |
| EP3948463B1 (en) | Teleoperation for exception handling | |
| US20180281815A1 (en) | Predictive teleassistance system for autonomous vehicles | |
| JP2020123341A (ja) | 自律走行モードと手動走行モードとの間の走行モードを変更するリモートコントロール自律走行自動車のための方法及び装置 | |
| US11543825B2 (en) | Human supervision of an automated driving system | |
| JP2018077652A (ja) | 車両運転支援システムおよび集合住宅 | |
| JP2019537159A5 (ja) | ||
| US20210382500A1 (en) | Systems and methods for using human-operated material-transport vehicles with fleet-management systems | |
| JP2019185280A (ja) | 管制装置 | |
| US20230134068A1 (en) | Autonomous Vehicle Navigation in Response to a Stopped Vehicle at a Railroad Crossing | |
| WO2022014174A1 (ja) | 情報処理方法及び情報処理システム | |
| US11807278B2 (en) | Autonomous vehicle passenger safety monitoring | |
| US20220397898A1 (en) | Remote control request system, remote control request method, and nontransitory storage medium | |
| US11755008B2 (en) | Using plays for human-AI decision-making in remote autonomous vehicle support | |
| CN109564674B (zh) | 便利乘客搭乘的自动驾驶车辆 | |
| US20240017744A1 (en) | Operational weather management | |
| WO2024062803A1 (ja) | 情報処理方法、情報処理装置、およびプログラム | |
| US20230322260A1 (en) | Systems and methods for dynamically responding to detected changes in a semantic map of an autonomous vehicle | |
| JP7326506B2 (ja) | 監視装置およびその制御方法 | |
| US20240069543A1 (en) | Vehicle remote guidance system | |
| US20230384797A1 (en) | System and method for inbound and outbound autonomous vehicle operations | |
| WO2023150234A2 (en) | Methods and apparatus for providing teleoperations support |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21842699 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2022536163 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2021842699 Country of ref document: EP Effective date: 20230215 |