WO2021229929A1 - ひずみ計測装置およびひずみ計測方法 - Google Patents
ひずみ計測装置およびひずみ計測方法 Download PDFInfo
- Publication number
- WO2021229929A1 WO2021229929A1 PCT/JP2021/012814 JP2021012814W WO2021229929A1 WO 2021229929 A1 WO2021229929 A1 WO 2021229929A1 JP 2021012814 W JP2021012814 W JP 2021012814W WO 2021229929 A1 WO2021229929 A1 WO 2021229929A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- sample
- marker
- stress
- luminescent material
- light
- Prior art date
Links
Images








Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N3/00—Investigating strength properties of solid materials by application of mechanical stress
- G01N3/02—Details
- G01N3/06—Special adaptations of indicating or recording means
Definitions
- the present invention relates to a strain measuring device and a strain measuring method.
- Patent Document 1 discloses a mechanoluminescent evaluation device that measures and evaluates the mechanoluminescent intensity of a mechanoluminescent body.
- a stress-stimulated luminescent material is placed on the surface of a sample, and the stress-stimulated luminescent material is made to emit light by applying an external force to the stress-stimulated luminescent material together with the sample.
- the stress (strain) generated in the sample can be measured.
- the strain measurement using the above-mentioned stress-stimulated luminescent material is configured to capture the light emission of the stress-stimulated luminescent material in a light-shielded state, it is not possible to acquire the deformed state of the sample due to an external force. Therefore, there is a problem that it is difficult to verify what kind of deformation state the sample is in when the strain is generated.
- the present invention has been made to solve such a problem, and an object thereof is to measure the strain generated in a sample by utilizing the luminescence phenomenon of a stress-stimulated luminescent material and to acquire a deformed state of the sample. It is to provide a strain measuring device and a strain measuring method which can be performed.
- the strain measuring device measures the strain of a sample.
- a stress-stimulated luminescent material is arranged at least in a predetermined area on the surface of the sample.
- the strain measuring device includes a holder that supports the sample, a load application mechanism that applies a load to the sample by operating the holder, a luminous marker placed on the surface of the holder, and a stress-stimulated luminescent material and a marker. It comprises a light source configured to irradiate the excitation light and a camera configured to image the light emitted by the stress-stimulated luminescent material when a load is applied and the light emitted by the marker.
- the strain measuring method is a strain measuring method for measuring the strain of a sample, in which a step of arranging a stress-stimulated luminescent material in at least a predetermined region on the surface of the sample and a holder for supporting the sample.
- the present invention it is possible to provide a strain measuring device and a strain measuring method capable of measuring the strain generated in a sample by utilizing the light emission phenomenon of the stress-stimulated luminescent material and acquiring the deformed state of the sample.
- FIG. It is a block diagram which shows the whole structure of the strain measuring apparatus which concerns on Embodiment 1.
- FIG. It is a block diagram for demonstrating the functional configuration of a controller. It is a flowchart explaining the processing procedure of the strain measurement of a sample using the strain measuring apparatus which concerns on Embodiment 1.
- FIG. It is a figure for demonstrating the sample preparation process of step S10 of FIG. It is a figure for demonstrating the process of steps S30, S40, S50 of FIG. It is a figure which shows typically the captured image acquired by step S50 of FIG. It is a figure which shows typically the change of the captured image acquired by step S50 of FIG.
- FIG. 1 is a block diagram showing an overall configuration of the strain measuring device according to the first embodiment.
- the strain measuring device 100 according to the first embodiment is a device that measures the stress (strain) generated in the test object 1 (hereinafter, also simply referred to as “sample”) by utilizing the light emission phenomenon of the stress-stimulated luminescent material.
- the strain measuring device 100 can also be used to test the durability against stress generated in the sample.
- Sample 1 has flexibility, for example, a flexible sheet or a flexible fiber.
- the flexible sheet can form, for example, a part of a flexible display or a wearable device of a communication terminal such as a smartphone or a tablet.
- the flexible fiber can form, for example, a part of an optical fiber cable.
- sample 1 is a rectangular flexible sheet.
- a stress-stimulated luminescent material 2 is arranged on the surface of the sample 1.
- the stress-stimulated luminescent material 2 is, for example, a stress-stimulated luminescent sheet containing a stress-stimulated luminescent material, and is arranged on the surface of at least a predetermined region of sample 1. This predetermined region is set to include a region where stress is generated when the flexible sheet is bent (that is, a deformed region of the flexible sheet).
- the stress-stimulated luminescent material 2 is integrally bent with the sample 1 to cause deformation (strain).
- the stress-stimulated luminescent material 2 is a member that emits light by a mechanical stimulus from the outside, and conventionally known ones can be used.
- the stress-stimulated luminescent material 2 has a property of emitting light by strain energy applied from the outside, and its luminescence intensity changes according to the strain energy.
- the stress-stimulated luminescent material 2 is a solid solution of an element that is the center of light emission in the skeleton of the crystal, and by selecting an inorganic matrix material and an element that is the center of light emission, it emits light at various wavelengths from ultraviolet to visible to infrared. Can be made to.
- the added defect controlled strontium aluminate europium as a luminescent center (SrAl 2 O 4: Eu, green light emission) was added as a luminescent center manganese structure controlled zinc sulfide (ZnS: Mn, emits yellow-orange), structurally controlled barium-calcium titanate ((Ba, Ca) TiO 3 : Pr, emits red) to which placeodim is added as the emission center.
- the strain measuring device 100 includes a load applying mechanism for applying a load to the sample 1.
- the load applying mechanism is configured to be able to reproduce the load applied to the flexible display during the folding operation on the smartphone.
- the load applying mechanism has a holder 10 and a first driver 20.
- the holder 10 supports the sample 1 so that the surface of the sample 1 is located on the upper side (upper side of the paper surface in FIG. 1).
- the first driver 20 is configured to be able to bend the sample 1 by shifting the holder 10 between the first posture and the second posture.
- a deformation tester disclosed in Japanese Patent Application Laid-Open No. 2019-39743 can be applied.
- the holder 10 has a first mounting plate 11, a second mounting plate 12, and a drive shaft 13.
- the first mounting plate 11 has a rectangular main surface 11a.
- the second mounting plate 12 has a rectangular main surface 12a.
- the sample 1 is attached to the main surface 11a and the main surface 12a by adhering the back surface thereof.
- the first mounting plate 11 and the second mounting plate 12 correspond to one embodiment of the "movable portion", and the drive shaft 13 corresponds to one embodiment of the "fixed portion”.
- the first driver 20 is attached to the base of the drive shaft 13.
- the drive shaft 13 is rotatably supported with its central axis parallel to the X axis.
- the first driver 20 includes a motor, a transmission, and a control unit (not shown) inside, and rotates the drive shaft 13 in the forward and reverse directions around the central axis at a predetermined rotation angle and rotation speed. Let me.
- the rotation angle and rotation speed of the drive shaft 13 are variable, so that the bending angle and bending speed in the bending test of the sample 1 described later can be appropriately changed.
- the second mounting plate 12 is non-rotatably mounted on the drive shaft 13.
- the second mounting plate 12 rotates with the rotation of the drive shaft 13.
- the first mounting plate 11 also rotates.
- the strain measuring device 100 further includes a light source 31, a housing 15, a camera 40, a second driver 42, a third driver 32, and a controller 50.
- the light source 31 is arranged above the sample 1 and is configured to irradiate the stress-stimulated luminescent material 2 with excitation light. Upon receiving the excitation light, the stress-stimulated luminescent material 2 transitions to the light emitting state.
- the excitation light is preferably light having a wavelength range of ultraviolet light to blue light.
- As the excitation light light included in the wavelength range of 10 to 600 nm (including the ultraviolet to visible light region) can be used.
- an ultraviolet lamp, an LED (Light Emitting Diode), or the like can be used.
- the stress luminescent material 2 is irradiated with the excitation light from two directions, but the light source 31 is configured to irradiate the stress-stimulated luminescent material 2 with the excitation light from one direction or three or more directions. May be good.
- the holder 10 and the light source 31 are housed in the housing 15.
- the housing 15 can be used as a dark room while the light source 31 is stopped.
- the third driver 32 supplies electric power for driving the light source 31.
- the third driver 32 can control the amount of excitation light emitted from the light source 31, the irradiation time of the excitation light, and the like by controlling the power supplied to the light source 31 in response to a command received from the controller 50.
- the camera 40 is arranged above the sample 1 so as to include the stress-stimulated luminescent material 2 located on the predetermined region of the sample 1 in the imaging field of view.
- the camera 40 is attached to the ceiling surface of the housing 15.
- the camera 40 is arranged so that the focus position is located at at least one point in the predetermined region of the sample 1. It is preferable that at least one point in the predetermined region is located at the central portion of the bending of the sample 1.
- the camera 40 includes an optical system such as a lens and an image sensor.
- the image pickup device is realized by, for example, a CCD (Charge Coupled Device) sensor, a CMOS (Complementary Metal Oxide Semiconductor) sensor, or the like.
- the image pickup device generates an image pickup image by converting the light incident from the stress-stimulated luminescent material 2 via the optical system into an electric signal.
- the camera 40 is configured to capture the light emission of the stress-stimulated luminescent material 2 located on a predetermined region when a load is applied to the sample 1.
- the image data generated by the image pickup of the camera 40 is transmitted to the controller 50.
- the second driver 42 is configured to be able to change the focus position of the camera 40 in response to a command received from the controller 50.
- the second driver 42 can adjust the focus position of the camera 40 by moving the camera 40 along the Z-axis direction and the Y-axis direction shown in FIG.
- the second driver 42 has a motor that rotates a feed screw that moves the camera 40 in the Z-axis direction and the Y-axis direction, and a motor driver that drives the motor.
- the feed screw is rotationally driven by the motor, so that the camera 40 is positioned at a designated position within a predetermined range in each of the Z-axis and Y-axis directions.
- the second driver 42 transmits the position information indicating the position of the camera 40 to the controller 50.
- the controller 50 controls the entire strain measuring device 100.
- the controller 50 has a processor 501, a memory 502, an input / output interface (I / F) 503, and a communication I / F 504 as main components. Each of these parts is communicably connected to each other via a bus (not shown).
- the processor 501 is typically an arithmetic processing unit such as a CPU (Central Processing Unit) or an MPU (Micro Processing Unit).
- the processor 501 controls the operation of each part of the strain measuring device 100 by reading and executing the program stored in the memory 502. Specifically, the processor 501 realizes each of the processes of the strain measuring device 100 described later by executing the program.
- FIG. 1 illustrates a configuration in which the number of processors is singular, the controller 50 may be configured to have a plurality of processors.
- the memory 502 is realized by a non-volatile memory such as a RAM (Random Access Memory), a ROM (Read Only Memory), and a flash memory.
- the memory 502 stores a program executed by the processor 501, data used by the processor 501, and the like.
- the input / output I / F 503 is an interface for exchanging various data between the processor 501 and the first driver 20, the third driver 32, the camera 40, and the second driver 42.
- the communication I / F 504 is a communication interface for exchanging various data between the strain measuring device 100 and another device, and is realized by an adapter or a connector.
- the communication method may be a wireless communication method using a wireless LAN (Local Area Network) or the like, or a wired communication method using USB (Universal Serial Bus) or the like.
- a display 60 and an operation unit 70 are connected to the controller 50.
- the display 60 is composed of a liquid crystal panel or the like capable of displaying an image.
- the operation unit 70 receives a user's operation input to the strain measuring device 100.
- the operation unit 70 is typically composed of a touch panel, a keyboard, a mouse, and the like.
- the controller 50 is communicatively connected to the first driver 20, the third driver 32, the camera 40, and the second driver 42.
- the communication between the controller 50 and the first driver 20, the third driver 32, the camera 40 and the second driver 42 may be realized by wireless communication or wired communication.
- FIG. 2 is a block diagram for explaining the functional configuration of the controller 50.
- the controller 50 includes a stress control unit 61, a light source control unit 62, an image pickup control unit 63, a measurement control unit 64, a data acquisition unit 65, and a data processing unit 66. These are functional blocks realized based on the processor 501 executing a program stored in memory 502.
- the stress control unit 61 controls the operation of the first driver 20. Specifically, the stress control unit 61 controls the operating speed, operating time, and the like of the first driver 20 according to preset measurement conditions. By controlling the operating speed and operating time of the first driver 20, the rotation angle and rotation speed of the drive shaft 13 in the holder 10 can be adjusted. Thereby, the bending angle, the bending speed, and the like of the sample 1 can be adjusted.
- the light source control unit 62 controls the drive of the light source 31 by the third driver 32. Specifically, the light source control unit 62 generates a command for instructing the magnitude of the power supplied to the light source 31 and the power supply time to the light source 31 based on the preset measurement conditions. , The generated command is output to the third driver 32. By controlling the power supplied to the light source 31 by the third driver 32 in accordance with the command, the amount of excitation light emitted from the light source 31 and the irradiation time of the excitation light can be adjusted.
- the image pickup control unit 63 controls the movement of the camera 40 by the second driver 42. Specifically, the image pickup control unit 63 follows the movement of the predetermined region of the sample 1 based on the preset measurement conditions and the position information of the camera 40 input from the second driver 42, and causes the camera 40 to move. Generate a command to move. The image pickup control unit 63 outputs the generated command to the second driver 42. By moving the camera 40 according to the command, the second driver 42 can maintain the focus position of the camera 40 at at least one point in the predetermined region of the sample 1.
- the image pickup control unit 63 further controls the image pickup by the camera 40. Specifically, the image pickup control unit 63 controls the camera 40 so as to take an image of the sample 1 at least when a load is applied according to preset measurement conditions.
- the measurement conditions for imaging include the frame rate of the camera 40.
- the data acquisition unit 65 acquires the image data generated by the imaging of the camera 40, and transfers the acquired image data to the data processing unit 66.
- the data processing unit 66 measures the mechanoluminescence of the stress-stimulated luminescent material 2 by performing known image processing on the image data obtained by imaging the camera 40 when a load is applied.
- the data processing unit 66 generates, for example, an image showing the distribution of the stress-stimulated luminescence intensity in the stress-stimulated luminescent material 2.
- the data processing unit 66 can display the measurement result including the image captured by the camera 40 and the image showing the distribution of the mechanoluminescent intensity in the mechanoluminescent body 2 on the display 60.
- the measurement control unit 64 comprehensively controls the stress control unit 61, the light source control unit 62, the image pickup control unit 63, the data acquisition unit 65, and the data processing unit 66. Specifically, the measurement control unit 64 gives a control command to each unit based on the measurement conditions input to the operation unit 70, the information of the sample 1, and the like.
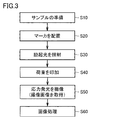
- FIG. 3 is a flowchart illustrating a processing procedure of strain measurement of sample 1 using the strain measuring device 100 according to the first embodiment.
- FIG. 4 is a diagram for explaining the sample preparation process of step S10 of FIG.
- FIG. 4 schematically shows a plan view of the holder 10, the sample 1, and the stress-stimulated luminescent material 2.
- Sample 1 is mounted on the main surface 11a of the first mounting plate 11 of the holder 10 and the main surface 12a of the second mounting plate 12.
- a deformation region is formed in the central portion of the sample 1 in the lateral direction.
- This deformed region has a strip-shaped shape extending in the vertical direction.
- the stress-stimulated luminescent material 2 is adhered to the surface of the sample 1 so as to be located at least on the deformation region of the sample 1.
- the stress-stimulated luminescent material 2 has a rectangular shape having a size similar to that of the sample 1, and is arranged so as to cover the entire surface of the sample 1.
- the stress-stimulated luminescent material 2 can be formed, for example, by attaching a stress-stimulated luminescent sheet containing a stress-stimulated luminescent material to a predetermined region of sample 1.
- the stress-stimulated luminescent material 2 is, for example, defect-controlled strontium aluminate (SrAl 2 O 4 : Eu) to which europium is added, and exhibits green light emission centered at a wavelength of 520 nm.
- the marker 3 is arranged on the surface of the holder 10 by step S20. Specifically, as shown in FIG. 4, the marker 3 is arranged on at least one of the main surface 11a of the first mounting plate 11 and the main surface 12a of the second mounting plate 12. In the example of FIG. 4, the marker 3 is arranged on the main surface 12a of the second mounting plate 12.
- Marker 3 is formed by a phosphorescent body.
- a phosphorescent body temporarily traps carriers such as electrons or holes generated by external energy (ultraviolet rays, purple light, blue light, etc.) in defects in the crystal, and the trapped carriers are gradually trapped by the thermal energy of the temperature. It shows a long-lasting luminescence by releasing to and recombining at the luminescence center.
- the phosphorescent body is also referred to as a long afterglow illuminant. Phosphorescent bodies are widely used in visibility luminous paints.
- the long afterglow means that even if the excitation light is stopped after the excitation light is irradiated, the light continues to be emitted for a long time (for example, about several minutes to several hours).
- the center wavelength (emission peak) of light emission of the phosphorescent body is generally about 480 to 700 nm (green to red).
- the center wavelength of the light emission of the phosphorescent body constituting the marker 3 is set to be different from the wavelength range of the excitation light emitted by the light source 31.
- the excitation light is ultraviolet light or blue light (wavelength range is 100 to 500 nm)
- the marker 3 uses a phosphorescent body having a center wavelength of light emission of 600 to 700 nm and exhibiting red light emission.
- the phosphorescent article showing a red light for example, Y 2 O 2 S: Ti , Mg, and the like Gd.
- the stress-stimulated luminescent material 2 is excited by the emission of the marker 3 even after the irradiation of the excitation light is stopped from the light source 31. This is because it becomes difficult to accurately measure the mechanoluminescence of the stress-stimulated luminescent material 2.
- the stress-stimulated luminescent material 2 is defect-controlled strontium aluminate (SrAl 2 O 4 : Eu) to which europium is added, the stress-stimulated luminescent material 2 emits green light.
- the marker 3 since the marker 3 emits red light, the light emission of the stress-stimulated luminescent material 2 and the light emission of the marker 3 can be clearly distinguished visually.
- the marker 3 can be formed by applying a phosphorescent paint to a predetermined region of the main surface 12a of the second mounting plate 12.
- the marker 3 can be formed by attaching a sheet made of a phosphorescent material to a predetermined region of the main surface 12a of the second mounting plate 12.
- the marker 3 can have any shape. In the example of FIG. 4, the marker 3 has a band-like shape. Further, the number of markers 3 may be singular or plural.
- the marker 3 is arranged on the surface of the movable portion of the holder 10. While the load is applied, the position of the marker 3 arranged on the movable portion changes as the sample 1 is deformed. By capturing the change in the position of the marker 3, the deformed state of the sample 1 can be acquired.
- step S30 of FIG. 3 the controller 50 irradiates the stress-stimulated luminescent material 2 and the marker 3 with excitation light from the light source 31.
- 5 (A) shows the sample 1 before the load is applied
- FIGS. 5 (B) and 5 (C) show the sample 1 under the load.
- the light source 31 irradiates excitation light (for example, ultraviolet rays).
- excitation light for example, ultraviolet rays.
- the stress-stimulated luminescent material 2 receives the excitation light and transitions to the luminescent state.
- the phosphorescent body constituting the marker 3 also receives the excitation light and transitions to the light emitting state. According to this, the stress-stimulated luminescent material 2 and the marker 3 can be excited at the same time by using a common light source 31. Even after the irradiation of the excitation light is stopped, the marker 3 continues to emit light.
- step S40 in FIG. 3 the controller 50 applies a load (bending load) to the sample 1 by driving the first driver 20 to bend the sample 1.
- a load bending load
- FIG. 5B the sample 1 is bent by rotating the drive shaft 13 in the positive direction (direction of arrow A) by the first driver 20.
- FIGS. 5B and 5C show step by step how the sample 1 is bent in conjunction with the forward rotation of the drive shaft 13. Assuming that the bending angle of the sample 1 is ⁇ , the bending angle ⁇ changes in the range of 0 ° to 90 °.
- step S50 of FIG. 3 the controller 50 takes an image of the sample 1 by the camera 40 at the timing of applying the load to the sample 1. That is, the camera 40 captures the light emission of the stress-stimulated luminescent material 2. Imaging by the camera 40 is performed in a dark room. The controller 50 can display the acquired captured image on the display 60.
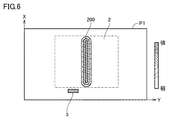
- FIG. 6 is a diagram schematically showing a captured image acquired by step S50 of FIG.
- the intensity of the emission intensity of the stress-stimulated luminescent material 2 is expressed by brightness on a two-dimensional plane.
- the intensity of the stress luminescence intensity may be expressed by at least one of chromaticity, saturation and lightness.
- the intensity of the stress luminescence intensity is drawn by different hatching for convenience. Therefore, on the right side of the captured image P1, a bar indicating the range of hatching assigned according to the intensity of the stress luminescence intensity is shown.
- the mechanoluminescent pattern 200 is vertically oriented (X-axis direction) in the central portion (that is, the central portion of bending) in the lateral direction (Y-axis direction) of the stress-stimulated luminescent material 2. Appears in the form of a strip extending to.
- This stress-stimulated luminescence pattern 200 corresponds to the deformation region of sample 1. Therefore, by extracting and analyzing the stress-stimulated luminescence pattern 200 from the captured image P1, it becomes possible to visualize and quantify the strain generated in the sample 1.
- a portion having a large stress luminescence intensity indicates a portion having a large strain
- a portion having a small stress luminescence intensity indicates a portion having a small strain. Therefore, based on the distribution of the stress-stimulated luminescence intensity, the distribution of the strain amount of the sample 1 in the bent state can be visualized and quantified.
- the emission of the marker 3 appears in the captured image P1.
- This light emission corresponds to the afterglow emitted by the phosphorescent body constituting the marker 3.
- FIGS. 5B and 5C when the first mounting plate 11 and the second mounting plate 12 are rotated, the position of the marker 3 arranged on the main surface 12a of the second mounting plate 12 is located. Change. Therefore, the position and shape of the light emission of the marker 3 appearing in the captured image P1 acquired by the camera 40 located above the main surface 12a of the second mounting plate 12 will also change.
- FIG. 7 is a diagram schematically showing a change in the captured image P1 acquired in step S50 of FIG.
- FIG. 7A schematically shows the sample 1 before the load is applied and the captured image thereof.
- 7 (B) and 7 (C) schematically show the sample 1 under load and the captured image thereof.
- 7 (A) to 7 (C) show the first mounting plate 11, the second mounting plate 12, and the sample 1 attached to these as viewed from the X-axis direction.
- 7 (B) and 7 (C) show a state in which the sample 1 is bent from the state of FIG. 7 (A).
- the stress-stimulated luminescent material 2 is arranged on the surface of the sample 1, and the marker 3 is arranged on the main surface 12a of the second mounting plate 12.
- the stress-stimulated luminescent material 2 has not yet emitted light. Therefore, only the light emission of the marker 3 appears in the captured image P1. Assuming that the length of the marker 3 in the captured image P1 in the Y direction is L, the length L is the length L1 based on the length of the marker 3 in the Y direction.
- the main drive shaft 13 When the drive shaft 13 is rotated in the positive direction (clockwise direction) around the central axis of the drive shaft 13 by the first driver 20 from the state of FIG. 7 (A), as shown in FIGS. 7 (B) and 7 (C), the main drive shaft 13 is rotated.
- the sample 1 attached to the surface 12a and the main surface 11a is the main surface 12a and the main surface that rotate symmetrically with respect to the plane P about the end portion 12ac and the end portion 11ac that are parallel to each other and have a constant distance K. It is folded between 11a. Therefore, the sample 1 in any of the vicinity of the end portion 12ac, the vicinity of the end portion 11ac, and between the end portions 12ac and 11ac is bent with substantially the same bending radius.
- the load applying mechanism of FIG. 1 rotates the main surface 12a and the main surface 11a in a state where the end 12ac and the end 11ac are always parallel to the end 12ac and the end 11ac and the distance K is kept constant.
- the portion of the sample 1 located between the vicinity of the end portion 12ac and the vicinity of the end portion 11ac is deformed, but the rest of the other sample 1 is hardly deformed.
- FIG. 8 is a diagram showing the relationship between the bending angle ⁇ of the sample 1 and the length L of the marker 3 appearing in the captured image P1 in the Y direction.
- the length L of the marker 3 gradually becomes shorter from L1 to L2 as the bending angle ⁇ of the sample 1 gradually increases.
- the deformed state of the sample 1 based on the detected length L ( The bending angle ⁇ ) of the sample 1 can be known.
- the data processing unit 66 is based on the length L of the marker 3 in the captured image P1.
- the bending angle ⁇ of the sample 1 can be obtained.
- step S60 by extracting the stress-stimulated luminescence pattern 200 that appears in the captured image P1 for each bending angle ⁇ , the distribution of the stress-stimulated luminescence intensity shown by the stress-stimulated luminescence pattern 200 can be associated with the deformed state of the sample 1. .. According to this, it is possible to verify what kind of deformation state (bending angle ⁇ ) the sample 1 is in when the strain is generated in the sample 1. In addition, it is possible to evaluate the correlation between the time-series change in the distribution of stress-stimulated luminescence intensity and the time-series change in the deformation state of sample 1.
- the stress-stimulated luminescent material 2 is arranged on the surface of the sample 1 and the surface of the holder 10 supporting the sample 1 has a phosphorescent property.
- the marker 3 having the marker 3 the deformed state of the sample 1 can be acquired based on the luminescence of the marker 3 at the time of measuring the stress luminescence in a dark place.
- FIG. 9 is a diagram for explaining the process of arranging the marker in step S20 of FIG.
- FIG. 9 schematically shows a plan view of the holder 10, the sample 1, the stress-stimulated luminescent material 2, and the marker 3.
- FIG. 9 differs from FIG. 4 only in the configuration of the marker 3.
- a plurality of markers 3 are arranged on the main surface 11a of the first mounting plate 11 of the holder 10 and the main surface 12a of the second mounting plate 12.
- the plurality of markers 3 are arranged on the outer peripheral portion of the sample 1.
- four markers 3 are arranged at the four corners of the rectangular sample 1.
- the four markers 3 are formed by a phosphorescent body. As described in the first embodiment, the central wavelength of light emission of the phosphorescent body constituting each marker 3 is different from the wavelength range of the excitation light irradiated by the light source 31. Further, the stress luminescent material 2 and the marker 3 have different emission colors.
- the four markers 3 can be formed by applying a phosphorescent paint to predetermined areas of the main surface 11a of the first mounting plate 11 and the main surface 12a of the second mounting plate 12.
- the four markers 3 can be formed by attaching a sheet made of a phosphorescent material to predetermined regions of the main surface 11a of the first mounting plate 11 and the main surface 12a of the second mounting plate 12.
- the marker 3 can have any shape. In the example of FIG. 9, the marker 3 has an L-shape.
- the region where the marker 3 is arranged may be the surface of the holder 10 that supports the sample 1 and may be the outer peripheral portion of the sample 1.
- the number of markers 3 is not limited to four.
- step S30 of FIG. 3 the controller 50 irradiates the stress-stimulated luminescent material 2 and the four markers 3 with excitation light from the light source 31. Both the stress-stimulated luminescent material 2 and the four markers 3 receive the excitation light and transition to the luminescent state.
- step S40 the controller 50 applies a bending load to the sample 1 by driving the first driver 20 to bend the sample 1.
- the controller 50 takes an image of the sample 1 by the camera 40 at the timing of applying the load to the sample 1.
- the controller 50 can display the acquired captured image on the display 60.
- FIG. 10 schematically shows a change in the captured image acquired by step S50 in FIG.
- FIG. 10A shows the sample 1 before the load is applied and the captured image thereof.
- 10 (B) and 10 (C) show the sample 1 under load and the captured image thereof.
- the stress-stimulated luminescent material 2 has not yet emitted light. Therefore, only the light emission (afterglow) of the four markers 3 appears in the captured image P1.
- the emission positions of the four markers 3 in the captured image P1 correspond to the positions of the four corners of the rectangular sample 1.
- the positions of the four markers 3 in the captured image P1 represent the positions of the four corners of the sample 1, respectively. Therefore, since the shape of the sample 1 can be estimated based on the positions of the four markers 3 in the captured image P1, the deformed state of the sample 1 can be acquired. As a result, as in the first embodiment, by extracting the stress-stimulated luminescence pattern 200 appearing in the captured image P1, the distribution of the stress-stimulated luminescence intensity shown by the stress-stimulated luminescence pattern 200 can be associated with the deformed state of the sample 1. can.
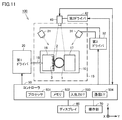
- FIG. 11 is a block diagram showing the overall configuration of the strain measuring device according to the third embodiment.
- the strain measuring device 100 according to the third embodiment has a different configuration of the load applying mechanism as compared with the strain measuring device 100 shown in FIG. The description of the parts common to the strain measuring device 100 shown in FIG. 1 will not be repeated.
- the load application mechanism is configured to apply a compressive load to sample 1.
- the load applying mechanism includes a holder 10 and a first driver 20.
- sample 1 is a flat plate member having a circular shape.
- a stress-stimulated luminescent material 2 is arranged on the surface of the sample 1.
- the stress-stimulated luminescent material 2 is arranged on the surface of at least a predetermined region of the sample 1. This predetermined region is set to include a region where stress is generated when a compressive load is applied to the sample 1 (that is, a deformation region of the sample 1). Therefore, the stress-stimulated luminescent material 2 is compressed integrally with the sample 1 to cause deformation (strain).
- the holder 10 has a first support member 16, a second support member 17, and a drive shaft 18.
- the first support member 16 and the second support member 17 have a columnar shape, and their ends in the longitudinal direction are arranged so as to face each other along the Y direction.
- a drive shaft 18 is connected to the first support member 16.
- the base of the drive shaft 18 is attached to the first driver 20.
- the first driver 20 is configured to be able to slide the first support member 16 in the Y direction by sliding the drive shaft 18 in the Y direction.
- the second support member 17 is fixed.
- the first support member 16 corresponds to one embodiment of the "movable portion"
- the second support member 17 corresponds to one embodiment of the "fixed portion”.
- both ends in the Y direction are supported by the first support member 16 and the second support member 17.
- a compressive load is applied to the sample 1.
- the camera 40 is arranged so as to include the stress-stimulated luminescent material 2 and the marker 3 located on the predetermined region of the sample 1 in the imaging field of view.
- the processing procedure for measuring the strain of the sample 1 using the strain measuring device 100 according to the third embodiment is basically the same as the flowchart shown in FIG. 3 except for the processing (S20) for arranging the markers.
- sample 1 is prepared by step S10 in FIG.
- the sample 1 is attached between the first support member 16 and the second support member 17 of the holder 10.
- the stress-stimulated luminescent material 2 is adhered to the surface of the sample 1.
- the stress-stimulated luminescent material 2 has a circular shape having a size similar to that of the sample 1, and is arranged so as to cover the entire surface of the sample 1.
- the marker 3 is placed on the holder 10 by step S20 in FIG. Specifically, the marker 3 is arranged on at least one surface of the first support member 16 and the second support member 17. In the example of FIG. 11, the marker 3 is arranged on the surface of the first support member 16.
- the marker 3 can be formed by applying a phosphorescent paint to a predetermined region on the surface of the first support member 16.
- the marker 3 can be formed by attaching a sheet made of a phosphorescent material to a predetermined region on the surface of the first support member 16.
- the marker 3 is formed by a phosphorescent body and constitutes a scale. This scale can be used as an index for measuring the size of the sample 1 in the Z direction. In order to serve as an index, the marker 3 is arranged in a region where the shape of the captured image P1 does not change when a load is applied. The marker 3 may be arranged on the surface of the second support member 17.
- step S30 of FIG. 3 the controller 50 irradiates the stress-stimulated luminescent material 2 and the marker 3 with excitation light from the light source 31. Both the stress luminescent material 2 and the marker 3 receive the excitation light and transition to the light emitting state. Even after the irradiation of the excitation light is stopped, the marker 3 continues to emit light.
- step S40 in FIG. 3 the controller 50 drives the first driver 20 to apply a load to the sample 1.
- a compressive load is applied to the sample 1 by sliding the first support member 16 in the Y direction by the first driver 20.
- step S50 of FIG. 3 the controller 50 takes an image of the sample 1 by the camera 40 at the timing of applying the load to the sample 1.
- the camera 40 captures the light emission of the stress-stimulated luminescent material 2 and the light emission of the marker 3.
- the controller 50 can display the image captured by the camera 40 on the display 60.
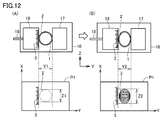
- FIG. 12 is a diagram schematically showing changes in the captured image P1 acquired in step S50 of FIG.
- FIG. 12A schematically shows the sample 1 before the load is applied and the captured image thereof.
- FIG. 12B schematically shows the sample 1 under load and the captured image thereof.
- FIG. 12 (A) and 12 (B) show the first support member 16, the second support member 17, and the sample 1 attached to them as viewed from the X-axis direction.
- FIG. 12B shows a state in which a compressive load is applied to the sample 1 from the state of FIG. 12A.
- the stress-stimulated luminescent material 2 is arranged on the surface of the sample 1
- the marker 3 is arranged on the surface of the first support member 16.
- the stress-stimulated luminescent material 2 has not yet emitted light when a compressive load is not applied to the sample 1. Therefore, only the light emission of the marker 3 appears in the captured image P1.
- the sample 1 is compressed and deformed in the Y direction as shown in FIG. 12 (B). Therefore, the light emission of the stress-stimulated luminescent material 2 and the light emission of the marker 3 appear in the captured image P1.
- the length of the sample 1 in the Y direction decreases from the initial value Y1 to Y2.
- the length of the sample 1 in the Z direction increases from the initial value Z1 to Z2.
- the amount of deformation of the sample 1 in the Y direction due to the compressive load can be obtained from the amount of displacement of the first support member 16 in the Y direction.
- the amount of deformation of the sample 1 in the Z direction can be obtained by using the scale indicated by the marker 3 in the captured image P1. According to this, it is possible to acquire the deformed state of the sample 1 due to the compressive load.
- the distribution of the stress-stimulated luminescence intensity shown by the stress-stimulated luminescence pattern 200 is associated with the deformed state of the sample 1. Can be done.
- the strain measuring device measures the strain of the sample.
- a stress-stimulated luminescent material is arranged at least in a predetermined area on the surface of the sample.
- the strain measuring device includes a holder that supports the sample, a load application mechanism that applies a load to the sample by operating the holder, a luminous marker placed on the surface of the holder, and a stress-stimulated luminescent material and a marker. It comprises a light source configured to irradiate the excitation light and a camera configured to image the light emitted by the stress-stimulated luminescent material when a load is applied and the light emitted by the marker.
- the stress-stimulated luminescent material is placed on the surface of the sample, and the mechanoluminescent marker is placed on the surface of the holder supporting the sample to emit stress in a dark place.
- the deformation state of the sample can be obtained based on the emission of the marker.
- the marker is composed of a phosphorescent body.
- the phosphorescent body is configured such that the wavelength of emission is different from the wavelength of excitation light.
- the excitation light is ultraviolet light or blue light.
- the marker is composed of a phosphorescent body that emits red light.
- the phosphorescent body is further configured such that the wavelength of light emission is different from the wavelength of light emission of the stress-stimulated luminescent material.
- the holder includes a fixed portion and a movable portion, and a load is applied to the sample by the relative movement of the movable portion with respect to the fixed portion. It is configured as follows. The marker is placed on the movable part of the holder.
- the position and / or shape of the marker appearing in the captured image changes according to the movement of the moving part.
- the deformed state of the sample can be acquired based on the change in the marker.
- the marker is arranged on the outer peripheral portion of the sample on the surface of the holder.
- the shape of the sample can be estimated based on the position of the marker appearing in the captured image, the deformed state of the sample can be acquired.
- the marker includes a scale for measuring the size of the sample.
- the amount of deformation of the sample can be measured using the scale indicated by the marker in the captured image.
- the strain measuring method is a strain measuring method for measuring the strain of a sample, in which a step of arranging a stress-stimulated luminescent material in at least a predetermined region on the surface of the sample and a holder for supporting the sample are provided.
- stress mechanoluminescence in a dark place is performed by arranging a stress-stimulated luminescent material on the surface of the sample and arranging a marker having a phosphorescent property on the surface of a holder supporting the sample.
- the deformation state of the sample can be obtained based on the emission of the marker.
- the strain measuring method according to paragraph 8 further includes a step of measuring the deformation state of the sample based on the light emission of the marker in the captured image acquired in the step of imaging.
- the holder includes a fixed portion and a movable portion.
- the step of applying the load includes a step of applying a load to the sample by moving the movable part relative to the fixed part.
- the step of placing the marker includes a step of placing the marker on the movable part of the holder.
- the position and / or shape of the marker appearing in the captured image changes according to the movement of the moving part.
- the deformed state of the sample can be acquired based on the change in the marker.
- the step of arranging the marker includes the step of arranging the marker on the outer peripheral portion of the sample on the surface of the holder.
- the shape of the sample can be estimated based on the position of the marker appearing in the captured image, the deformed state of the sample can be acquired.
- the step of arranging the marker includes the step of arranging the scale for measuring the size of the sample.
- the amount of deformation of the sample can be measured using the scale indicated by the marker in the captured image.
- the step of irradiating the excitation light includes a step of simultaneously irradiating the stress-stimulated luminescent material and the marker with the excitation light using a common light source.
- the configuration of the strain measuring device can be simplified and the strain measuring process can be simplified.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Investigating Strength Of Materials By Application Of Mechanical Stress (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
一態様に係るひずみ計測装置は、サンプル(1)のひずみを計測する。サンプル(1)の表面の少なくとも所定領域には応力発光体(2)が配置されている。ひずみ計測装置は、サンプル(1)を支持するホルダと、ホルダを動作させることにより、サンプル(1)に荷重を印加する荷重印加機構と、ホルダの表面に配置された、蓄光性を有するマーカ(3)と、応力発光体(2)およびマーカ(3)に励起光を照射するように構成された光源と、荷重が印加されたときの応力発光体(2)の発光、およびマーカ(3)の発光を撮像するように構成されたカメラとを備える。
Description
この発明は、ひずみ計測装置およびひずみ計測方法に関する。
フレキシブルデバイスの開発現場においては、一般的に、変形試験器を用いてサンプルに繰り返し荷重を印加することにより、サンプルの耐久性および性能を検証することが行なわれている。上記試験においては、サンプルに欠陥が生じていると、欠陥の周辺にひずみが発生し、サンプルが破断に至る可能性がある。
近年、このような欠陥を検出する技術としては、応力発光体を利用する技術が提案されている。例えば、特開2015-75477号公報(特許文献1)には、応力発光体の発光強度を計測して評価する応力発光評価装置が開示される。特許文献1では、応力発光体をサンプルの表面に配置し、サンプルとともに応力発光体に外力を印加することにより応力発光体を発光させる。撮像装置を用いて応力発光体の発光を撮像することにより、サンプルに生じる応力(ひずみ)を計測することができる。
上述した応力発光体を利用したひずみの計測は、遮光した状態で応力発光体の発光を撮像するように構成されるため、外力によるサンプルの変形状態を取得することができない。そのため、サンプルがどのような変形状態のときにサンプルにひずみが発生したのかを検証することが難しいという問題がある。
本発明はこのような課題を解決するためになされたものであって、その目的は、応力発光体の発光現象を利用してサンプルに発生するひずみを計測するとともに、サンプルの変形状態を取得することができるひずみ計測装置およびひずみ計測方法を提供することである。
本発明の第1の態様に係るひずみ計測装置は、サンプルのひずみを計測する。サンプルの表面の少なくとも所定領域には応力発光体が配置されている。ひずみ計測装置は、サンプルを支持するホルダと、ホルダを動作させることにより、サンプルに荷重を印加する荷重印加機構と、ホルダの表面に配置された、蓄光性を有するマーカと、応力発光体およびマーカに励起光を照射するように構成された光源と、荷重が印加されたときの応力発光体の発光、およびマーカの発光を撮像するように構成されたカメラとを備える。
本発明の第2の態様に係るひずみ計測方法は、サンプルのひずみを計測するひずみ計測方法であって、サンプルの表面の少なくとも所定領域に応力発光体を配置するステップと、サンプルを支持するホルダの表面に蓄光性を有するマーカを配置するステップと、応力発光体およびマーカに励起光を照射するステップと、ホルダを動作させることにより、サンプルに荷重を印加するステップと、荷重が印加されたときの応力発光体の発光、およびマーカの発光を撮像するステップとを備える。
この発明によれば、応力発光体の発光現象を利用してサンプルに発生するひずみを計測するとともに、サンプルの変形状態を取得することができるひずみ計測装置およびひずみ計測方法を提供することができる。
以下、本発明の実施の形態について、図面を参照しながら詳細に説明する。なお、図中の同一または相当部分には同一符号を付してその説明は繰返さない。
[実施の形態1]
<ひずみ計測装置の構成>
図1は、実施の形態1に係るひずみ計測装置の全体構成を示すブロック図である。実施の形態1に係るひずみ計測装置100は、応力発光体の発光現象を利用して、試験対象1(以下、単に「サンプル」とも称する)に発生する応力(ひずみ)を計測する装置である。ひずみ計測装置100は、サンプルに発生する応力に対する耐久性を試験するためにも用いることができる。
<ひずみ計測装置の構成>
図1は、実施の形態1に係るひずみ計測装置の全体構成を示すブロック図である。実施の形態1に係るひずみ計測装置100は、応力発光体の発光現象を利用して、試験対象1(以下、単に「サンプル」とも称する)に発生する応力(ひずみ)を計測する装置である。ひずみ計測装置100は、サンプルに発生する応力に対する耐久性を試験するためにも用いることができる。
サンプル1は、フレキシブル性を有しており、例えばフレキシブルシートまたはフレキシブルファイバである。フレキシブルシートは、例えば、スマートフォンまたはタブレット等の通信端末のフレキシブルディスプレイまたはウェラブルデバイスの一部分を構成することができる。フレキシブルファイバは、例えば光ファイバケーブルの一部分を構成することができる。
図1の例では、サンプル1は、矩形状のフレキシブルシートである。サンプル1の表面には、応力発光体2が配置されている。応力発光体2は、例えば応力発光材料を含有する応力発光シートであり、少なくともサンプル1の所定領域の表面上に配置されている。この所定領域は、フレキシブルシートの折り曲げ時に応力が生じる領域(すなわち、フレキシブルシートの変形領域)を含むように設定されている。応力発光体2は、サンプル1と一体的に折り曲げられて変形(ひずみ)が生じることになる。
応力発光体2は、外部からの機械的な刺激によって発光する部材であり、従来公知のものを用いることができる。応力発光体2は、外部から印加されるひずみエネルギーによって発光するという性質を有しており、その発光強度はひずみエネルギーに応じて変化する。応力発光体2は、結晶の骨格中に発光中心となる元素を固溶したものであり、無機母体材料および発光中心の元素を選択することで、紫外~可視~赤外の様々な波長で発光させることができる。組成として代表的なものに、発光中心としてユーロピウムを添加した欠陥制御型アルミン酸ストロンチウム(SrAl2O4:Eu、緑色に発光)、マンガンを発光中心として添加し構造制御された硫化亜鉛(ZnS:Mn、黄橙色に発光)、プラセオジムを発光中心として添加した構造制御チタン酸バリウム・カルシウム((Ba,Ca)TiO3:Pr、赤色に発光)が挙げられる。
ひずみ計測装置100は、サンプル1に対して荷重を印加するための荷重印加機構を備える。図1の例では、荷重印加機構は、スマートフォンに対する折り畳み操作時にフレキシブルディスプレイに印加される荷重を再現可能に構成されている。
具体的には、荷重印加機構は、ホルダ10と、第1ドライバ20とを有する。ホルダ10は、サンプル1の表面が上側(図1の紙面上側)に位置するようにサンプル1を支持する。第1ドライバ20は、ホルダ10を第1の姿勢と第2の姿勢との間で遷移させることにより、サンプル1を折り曲げ可能に構成される。このような荷重印加機構には、例えば、特開2019-39743号公報に開示される変形試験器を適用することができる。
図1の例では、ホルダ10は、第1取付板11、第2取付板12および駆動軸13を有する。第1取付板11は、長方形状の主面11aを有する。第2取付板12は、長方形状の主面12aを有する。主面11aおよび主面12aには、サンプル1が、その裏面が接着されることにより取り付けられる。第1取付板11および第2取付板12は「可動部」の一実施例に対応し、駆動軸13は「固定部」の一実施例に対応する。
第1ドライバ20は、駆動軸13の基部に取り付けられる。駆動軸13は、その中心軸がX軸に平行な状態で回動自在に支持される。第1ドライバ20は、内部にモータ、変速機および制御部(図示せず)を含んでおり、所定の回動角度および回動速度により駆動軸13をその中心軸の周りに正逆に回動させる。なお、駆動軸13の回動角度および回動速度は可変であり、これにより、後述するサンプル1の折り曲げ試験における折り曲げ角度および折り曲げ速度を適宜変更することができる。
第2取付板12は、駆動軸13に回動不可能に取り付けられる。駆動軸13の回動に伴って第2取付板12が回動する。第2取付板12が回動すると、第1取付板11も回動する。
ひずみ計測装置100は、光源31と、筐体15と、カメラ40と、第2ドライバ42と、第3ドライバ32と、コントローラ50と、をさらに備える。
光源31は、サンプル1の上方に配置されており、応力発光体2に対して励起光を照射するように構成される。励起光を受けて、応力発光体2が発光状態に遷移する。励起光は、紫外線~青色光の波長域を有する光であることが好ましい。なお、励起光としては、10~600nmの波長域に含まれる光(紫外線から可視光領域を含む)を用いることができる。光源31には、紫外線ランプ、LED(Light Emitting Diode)などを用いることができる。
図1の例では、応力発光体2に対して2方向から励起光を照射する構成としたが、光源31は1方向または3方向以上から応力発光体2に対して励起光を照射する構成としてもよい。
ホルダ10および光源31は、筐体15内に収容されている。光源31が停止している状態において、筐体15を暗室とすることができる。
第3ドライバ32は、光源31を駆動するための電力を供給する。第3ドライバ32は、コントローラ50から受ける指令に応じて光源31に供給する電力を制御することにより、光源31から照射される励起光の光量および励起光の照射時間などを制御することができる。
カメラ40は、サンプル1の上方に、サンプル1の所定領域上に位置する応力発光体2を撮像視野に含むように配置される。図1の例では、カメラ40は、筐体15の天井面に取り付けられている。具体的には、カメラ40は、フォーカス位置がサンプル1の所定領域内の少なくとも1点に位置するように配置される。所定領域内の少なくとも1点は、サンプル1の曲げの中心部分に位置することが好ましい。
カメラ40は、レンズなどの光学系および撮像素子を含む。撮像素子は、たとえばCCD(Charge Coupled Device)センサ、CMOS(Complementary Metal Oxide Semiconductor)センサなどにより実現される。撮像素子は、光学系を介して応力発光体2から入射される光を電気信号に変換することによって撮像画像を生成する。
カメラ40は、サンプル1に対する荷重印加時において、所定領域上に位置する応力発光体2の発光を撮像するように構成される。カメラ40の撮像により生成された画像データはコントローラ50へ送信される。
第2ドライバ42は、コントローラ50から受ける指令に応じて、カメラ40のフォーカス位置を変更可能に構成される。具体的には、第2ドライバ42は、カメラ40を図1に示すZ軸方向およびY軸方向に沿って移動させることにより、カメラ40のフォーカス位置を調整することができる。例えば、第2ドライバ42は、カメラ40をZ軸方向およびY軸方向に移動させる送りねじを回転させるモータと、モータを駆動するモータドライバとを有する。送りねじがモータによって回転駆動されることにより、カメラ40は、Z軸およびY軸の各方向の所定範囲内の指定された位置に位置決めされる。また、第2ドライバ42は、カメラ40の位置を示す位置情報をコントローラ50へ送信する。
コントローラ50は、ひずみ計測装置100全体を制御する。コントローラ50は、主な構成要素として、プロセッサ501と、メモリ502と、入出力インターフェイス(I/F)503と、通信I/F504とを有する。これらの各部は、図示しないバスを介して互いに通信可能に接続される。
プロセッサ501は、典型的には、CPU(Central Processing Unit)またはMPU(Micro Processing Unit)などの演算処理装置である。プロセッサ501は、メモリ502に記憶されたプログラムを読み出して実行することで、ひずみ計測装置100の各部の動作を制御する。具体的には、プロセッサ501は、当該プログラムを実行することによって、後述するひずみ計測装置100の処理の各々を実現する。なお、図1の例では、プロセッサが単数である構成を例示しているが、コントローラ50は複数のプロセッサを有する構成としてもよい。
メモリ502は、RAM(Random Access Memory)、ROM(Read Only Memory)およびフラッシュメモリなどの不揮発性メモリによって実現される。メモリ502は、プロセッサ501によって実行されるプログラム、またはプロセッサ501によって用いられるデータなどを記憶する。
入出力I/F503は、プロセッサ501と、第1ドライバ20、第3ドライバ32、カメラ40および第2ドライバ42との間で各種データをやり取りするためのインターフェイスである。
通信I/F504は、ひずみ計測装置100と他の装置との間で各種データをやり取りするための通信インターフェイスであり、アダプタまたはコネクタなどによって実現される。なお、通信方式は、無線LAN(Local Area Network)などによる無線通信方式であってもよいし、USB(Universal Serial Bus)などを利用した有線通信方式であってもよい。
コントローラ50には、ディスプレイ60および操作部70が接続される。ディスプレイ60は、画像を表示可能な液晶パネルなどで構成される。操作部70は、ひずみ計測装置100に対するユーザの操作入力を受け付ける。操作部70は、典型的には、タッチパネル、キーボード、マウスなどで構成される。
コントローラ50は、第1ドライバ20、第3ドライバ32、カメラ40および第2ドライバ42と通信接続されている。コントローラ50と第1ドライバ20、第3ドライバ32、カメラ40および第2ドライバ42との間の通信は、無線通信で実現されてもよいし、有線通信で実現されてもよい。
<コントローラ50の機能構成>
図2は、コントローラ50の機能構成を説明するためのブロック図である。
図2は、コントローラ50の機能構成を説明するためのブロック図である。
図2を参照して、コントローラ50は、応力制御部61、光源制御部62、撮像制御部63、測定制御部64、データ取得部65、およびデータ処理部66を有する。これらは、プロセッサ501がメモリ502に格納されたプログラムを実行することに基づいて実現される機能ブロックである。
応力制御部61は、第1ドライバ20の動作を制御する。具体的には、応力制御部61は、予め設定されている測定条件に従って、第1ドライバ20の動作速度および動作時間などを制御する。第1ドライバ20の動作速度および動作時間を制御することによって、ホルダ10における駆動軸13の回動角度および回動速度などを調整することができる。これにより、サンプル1の折り曲げ角度および折り曲げ速度などを調整することができる。
光源制御部62は、第3ドライバ32による光源31の駆動を制御する。具体的には、光源制御部62は、予め設定されている測定条件に基づいて、光源31に供給する電力の大きさおよび光源31への電力の供給時間などを指示するための指令を生成し、生成した指令を第3ドライバ32へ出力する。第3ドライバ32が当該指令に従って光源31に供給する電力を制御することにより、光源31から照射される励起光の光量および励起光の照射時間などを調整することができる。
撮像制御部63は、第2ドライバ42によるカメラ40の移動を制御する。具体的には、撮像制御部63は、予め設定されている測定条件および第2ドライバ42から入力されるカメラ40の位置情報に基づいて、サンプル1の所定領域の移動に追従してカメラ40を移動させるための指令を生成する。撮像制御部63は、生成した指令を第2ドライバ42へ出力する。第2ドライバ42が当該指令に従ってカメラ40を移動させることにより、カメラ40のフォーカス位置をサンプル1の所定領域の少なくとも1点に維持することができる。
撮像制御部63はさらに、カメラ40による撮像を制御する。具体的には、撮像制御部63は、予め設定されている測定条件に従って、少なくとも荷重印加時において、サンプル1を撮像するようにカメラ40を制御する。撮像に関する測定条件は、カメラ40のフレームレートを含む。
データ取得部65は、カメラ40の撮像により生成された画像データを取得し、取得した画像データをデータ処理部66へ転送する。
データ処理部66は、荷重印加時におけるカメラ40の撮像により得られた画像データに対して公知の画像処理を施すことにより、応力発光体2の応力発光を測定する。データ処理部66は、例えば、応力発光体2における応力発光強度の分布を示す画像を生成する。データ処理部66は、カメラ40による撮像画像および応力発光体2における応力発光強度の分布を示す画像を含む測定結果をディスプレイ60に表示させることができる。
測定制御部64は、応力制御部61、光源制御部62、撮像制御部63、データ取得部65およびデータ処理部66を統括的に制御する。具体的には、測定制御部64は、操作部70に入力される測定条件およびサンプル1の情報などに基づいて、各部に対して制御指令を与える。
<ひずみ計測方法>
次に、実施の形態1に係るひずみ計測装置100を用いたサンプル1のひずみ計測方法について説明する。
次に、実施の形態1に係るひずみ計測装置100を用いたサンプル1のひずみ計測方法について説明する。
図3は、実施の形態1に係るひずみ計測装置100を用いたサンプル1のひずみ計測の処理手順を説明するフローチャートである。
図3を参照して、最初にステップS10により、サンプル1が準備される。図4は、図3のステップS10のサンプル準備処理を説明するための図である。図4には、ホルダ10、サンプル1および応力発光体2の平面図が模式的に示される。
サンプル1は、ホルダ10の第1取付板11の主面11aおよび第2取付板12の主面12a上に取り付けられる。図1に示す荷重印加機構によってサンプル1を折り曲げたとき、サンプル1の横方向における中央部分には変形領域が形成される。この変形領域は、縦方向に延びる帯状の形状を有している。応力発光体2は、少なくともサンプル1の変形領域上に位置するように、サンプル1の表面に接着される。図4の例では、応力発光体2は、サンプル1と同程度のサイズの矩形形状を有しており、サンプル1の表面の全域を覆うように配置されている。
応力発光体2は、例えば、応力発光材料を含有する応力発光シートをサンプル1の所定領域に貼り付けることによって形成することができる。応力発光体2は、例えば、ユーロピウムを添加した欠陥制御型アルミン酸ストロンチウム(SrAl2O4:Eu)であり、波長520nmを中心に緑色の発光を示す。
次にステップS20により、ホルダ10の表面にマーカ3が配置される。具体的には、図4に示すように、第1取付板11の主面11aおよび第2取付板12の主面12aの少なくとも一方にマーカ3が配置される。図4の例では、マーカ3は、第2取付板12の主面12a上に配置されている。
マーカ3は、蓄光体により形成されている。蓄光体とは、外部からのエネルギー(紫外線、紫光または青色光など)によって生成した電子またはホールなどのキャリアを一時的に結晶内欠陥にトラップし、当該トラップされたキャリアが気温の熱エネルギーによって徐々に解放し、発光中心で再結合することによって長時間持続する発光を示すものである。蓄光体は、長残光発光体とも称される。蓄光体は、視認性夜光塗料に広く用いられている。
本明細書において、長残光とは、励起光を照射した後に励起光を停止しても長時間(例えば数分から数時間程度)発光し続けることをいう。蓄光体の発光の中心波長(発光ピーク)は、一般的に480~700nm程度(緑~赤)である。
本実施の形態では、マーカ3を構成する蓄光体の発光の中心波長を、光源31が照射する励起光の波長域と異ならせる構成とする。例えば、励起光が紫外線または青色光(波長域が100~500nm)である場合には、マーカ3には、発光の中心波長が600~700nmであり、赤色の発光を示す蓄光体が用いられる。赤色の発光を示す蓄光体には、例えば、Y2O2S:Ti,Mg,Gdなどがある。
これは、マーカ3の発光の中心波長が励起光の波長域に含まれていると、光源31から励起光の照射を停止した後においても、マーカ3の発光を受けて応力発光体2が励起され続けることになり、応力発光体2の応力発光を正確に計測することが困難となるためである。
なお、応力発光体2がユーロピウムを添加した欠陥制御型アルミン酸ストロンチウム(SrAl2O4:Eu)である場合、応力発光体2は緑色の発光を示す。一方、マーカ3が赤色の発光を示すことから、応力発光体2の発光とマーカ3の発光とを目視にて明確に識別することができる。
マーカ3は、第2取付板12の主面12aの所定領域に蓄光塗料を塗布することにより形成することができる。あるいは、マーカ3は、第2取付板12の主面12aの所定領域に蓄光材料からなるシートを貼り付けることによって形成することができる。
マーカ3は、任意の形状とすることができる。図4の例では、マーカ3は、帯状の形状を有している。また、マーカ3の個数は単数であっても複数であってもよい。
マーカ3は、ホルダ10の可動部の表面に配置することが好ましい。荷重の印加中、サンプル1の変形とともに、可動部上に配置されたマーカ3の位置が変化する。マーカ3の位置の変化を捉えることにより、サンプル1の変形状態を取得することができる。
次に、図3のステップS30により、コントローラ50は、応力発光体2およびマーカ3に対して、光源31から励起光を照射する。図5(A)には荷重印加前のサンプル1が示され、図5(B)および(C)には荷重印加中のサンプル1が示される。
図5(A)に示すように、光源31は励起光(例えば紫外線)を照射する。応力発光体2は励起光を受けて発光状態に遷移する。このとき、マーカ3を構成する蓄光体も励起光を受けて発光状態に遷移する。これによると、共通の光源31を用いて応力発光体2およびマーカ3を同時に励起することができる。なお、励起光の照射を停止した後も、マーカ3は発光し続ける。
次に、図3のステップS40に進み、コントローラ50は、第1ドライバ20を駆動させてサンプル1を折り曲げることにより、サンプル1に荷重(曲げ荷重)を印加する。図5(B)に示すように、第1ドライバ20によって駆動軸13を正方向(矢印Aの方向)に回動させることにより、サンプル1を折り曲げる。図5(B)および(C)には、駆動軸13の正方向の回動に連動して、サンプル1が折り曲げられる様子が段階的に示されている。サンプル1の曲げ角度をθとすると、曲げ角度θは0°~90°の範囲で変化する。
図3のステップS50では、コントローラ50は、サンプル1に対する荷重印加のタイミングに合わせて、カメラ40によりサンプル1を撮像する。すなわち、カメラ40は、応力発光体2の発光を撮像する。カメラ40による撮像は暗室内にて行なわれる。コントローラ50は、取得される撮像画像をディスプレイ60に表示させることができる。
図6は、図3のステップS50により取得される撮像画像を模式的に示す図である。図6に示すように、撮像画像P1では、応力発光体2の発光強度の強さが2次元平面上に明度で表現される。なお、撮像画像P1において、応力発光強度の強弱が、色度、彩度および明度の少なくとも1つによって表現されてもよい。図6では、応力発光強度の強弱を便宜的に異なるハッチングで描いている。そのため、撮像画像P1の右側に、応力発光強度の強度に応じて割り当てられるハッチングの範囲を示すバーを示す。
図6に示すように、撮像画像P1には、応力発光パターン200が、応力発光体2の横方向(Y軸方向)における中央部分(すなわち、曲げの中心部分)に縦方向(X軸方向)に延びる帯状の形状となって現れる。この応力発光パターン200は、サンプル1の変形領域と対応している。したがって、撮像画像P1から応力発光パターン200を抽出して解析することにより、サンプル1に生じるひずみを可視化および定量化することが可能となる。具体的には、応力発光パターン200のうちの応力発光強度が大きい部分はひずみが大きい部分を示し、応力発光強度が小さい部分はひずみが小さい部分を示している。よって、応力発光強度の分布に基づいて、折り曲げられた状態でのサンプル1のひずみ量の分布を可視化および定量化することができる。
撮像画像P1にはさらに、マーカ3の発光が現れる。この発光は、マーカ3を構成する蓄光体が発する残光に相当する。図5(B)および(C)に示すように、第1取付板11および第2取付板12を回動したとき、第2取付板12の主面12a上に配置されるマーカ3の位置が変化する。そのため、第2取付板12の主面12aの上方に位置するカメラ40により取得される撮像画像P1に現れるマーカ3の発光の位置および形状も変化することになる。
図7は、図3のステップS50により取得される撮像画像P1の変化を模式的に示す図である。図7(A)には、荷重印加前のサンプル1およびその撮像画像が模式的に示されている。図7(B)および(C)には、荷重印加中のサンプル1およびその撮像画像が模式的に示されている。
図7(A)から図7(C)は、第1取付板11、第2取付板12およびこれらに取り付けられたサンプル1をX軸方向から見た様子を示している。図7(B)および(C)は、図7(A)の状態からサンプル1を折り曲げた状態を示している。なお、図4に示したように、サンプル1の表面には応力発光体2が配置されており、第2取付板12の主面12aにはマーカ3が配置されている。
図7(A)に示すように、サンプル1に荷重が印加されていない状態(すなわち、曲げ角度θ=0°の状態)では、応力発光体2が未だ発光していない。そのため、撮像画像P1には、マーカ3の発光のみが現れている。撮像画像P1におけるマーカ3のY方向における長さをLとすると、長さLはマーカ3のY方向における長さに基づいた長さL1となる。
図7(A)の状態から第1ドライバ20によって駆動軸13をその中心軸周りに正方向(時計回り方向)に回動させると、図7(B)および(C)に示すように、主面12aおよび主面11aに取り付けられたサンプル1は、互いに平行であり、かつ距離Kが一定の端部12acおよび端部11acを中心に平面Pに面対称に回動する主面12aおよび主面11aの間で折り曲げられる。このため、端部12ac近傍、端部11ac近傍および端部12ac,11ac間、いずれの部分のサンプル1もほぼ同じ曲げ半径により曲げられる。
また、図1の荷重印加機構は、端部12acおよび端部11acを中心に端部12acおよび端部11acが常に平行かつ距離Kが一定に保たれた状態で主面12aおよび主面11aを回動させるため、端部12ac近傍と端部11ac近傍との間に位置するサンプル1の部分を変形させるものの、それ以外のサンプル1の残部はほぼ変形させない。
図7(B)に示すように、荷重印加機構によってサンプル1に曲げ荷重が印加されると、撮像画像P1には、応力発光体2の発光が現れる。曲げ荷重を受けてサンプル1の曲げ角度θは0°から90°に向かって徐々に増加する。すなわち、撮像画像P1には、応力発光体2の発光とマーカ3の発光とが現れる。なお、応力発光体2とマーカ3を構成する蓄光体との間で発光の色を異ならせることにより、撮像画像P1において応力発光体2の発光とマーカ3の発光とを明確に識別することができる。図7(B)の例では、応力発光体2は緑色に発光し、マーカ3は赤色に発光する。
ここで、図7(B)に示すように、サンプル1の曲げ角度θが0°から増加させると、第2取付板12の主面12aが傾斜するため、主面12aの上方に位置するカメラ40から見たマーカ3の長さが短くなる。その結果、図7(A)と比較して、撮像画像P1におけるマーカ3の長さLも短くなる。さらに、図7(C)に示すように、サンプル1の曲げ角度θが90°に達したとき、撮像画像P1におけるマーカ3の長さLが最も短くなる。
図8は、サンプル1の曲げ角度θと、撮像画像P1に現れるマーカ3のY方向の長さLとの関係を示す図である。図8を参照して、サンプル1の曲げ角度θ=0°(初期状態)のときの撮像画像P1におけるマーカ3の長さL=L1とし、サンプル1の曲げ角度θ=90°のときの撮像画像P1におけるマーカ3の長さL=L2とすると、サンプル1の曲げ角度θが徐々に大きくなるに従って、マーカ3の長さLはL1からL2に向かって徐々に短くなる。
図8に示す関係によると、荷重印加中に取得される撮像画像P1からマーカ3を抽出してその長さLを検出することにより、検出された長さLに基づいてサンプル1の変形状態(サンプル1の曲げ角度θ)を知ることができる。図8に示す関係を関係式またはテーブルとして予め用意しておくことにより、図3のステップS60に示す画像処理において、データ処理部66は、撮像画像P1におけるマーカ3の長さLに基づいて、サンプル1の曲げ角度θを求めることができる。
さらにステップS60では、曲げ角度θごとに撮像画像P1に現れる応力発光パターン200を抽出することにより、応力発光パターン200が示す応力発光強度の分布と、サンプル1の変形状態とを紐付けることができる。これによると、サンプル1がどのような変形状態(曲げ角度θ)であるときに、サンプル1にひずみが生じたのかを検証することができる。また、応力発光強度の分布の時系列変化とサンプル1の変形状態の時系列変化との相関関係を評価することが可能となる。
以上説明したように、実施の形態1に係るひずみ計測装置およびひずみ計測方法によれば、サンプル1の表面に応力発光体2を配置するとともに、サンプル1を支持するホルダ10の表面に蓄光性を有するマーカ3を配置することにより、暗所での応力発光の測定時において、マーカ3の発光に基づいてサンプル1の変形状態を取得することができる。
[実施の形態2]
実施の形態2では、マーカ3の他の構成例について説明する。実施の形態2に係るひずみ計測装置100の構成は、マーカ3の構成を除いて図1に示したひずみ計測装置100の構成が同じであるため、その説明を省略する。また、実施の形態2に係るひずみ計測装置100を用いたサンプル1のひずみ計測の処理手順は、マーカを配置する処理(S20)を除いて図3に示したフローチャートと基本的に同じであるため、その説明を省略する。
実施の形態2では、マーカ3の他の構成例について説明する。実施の形態2に係るひずみ計測装置100の構成は、マーカ3の構成を除いて図1に示したひずみ計測装置100の構成が同じであるため、その説明を省略する。また、実施の形態2に係るひずみ計測装置100を用いたサンプル1のひずみ計測の処理手順は、マーカを配置する処理(S20)を除いて図3に示したフローチャートと基本的に同じであるため、その説明を省略する。
図9は、図3のステップS20のマーカを配置する処理を説明するための図である。図9には、ホルダ10、サンプル1、応力発光体2およびマーカ3の平面図が模式的に示される。図9は、図4と比較してマーカ3の構成のみが異なる。
図9を参照して、ホルダ10の第1取付板11の主面11aおよび第2取付板12の主面12a上には複数のマーカ3が配置されている。複数のマーカ3は、サンプル1の外周部分に配置されている。図9の例では、矩形状のサンプル1の四隅に4個のマーカ3がそれぞれ配置されている。
4個のマーカ3は、蓄光体により形成されている。実施の形態1で述べたように、各マーカ3を構成する蓄光体の発光の中心波長は、光源31が照射する励起光の波長域と異なっている。また、応力発光体2とマーカ3とは発光の色が異なっている。
4個のマーカ3は、第1取付板11の主面11aおよび第2取付板12の主面12aの所定領域に蓄光塗料を塗布することにより形成することができる。あるいは、4個のマーカ3は、第1取付板11の主面11aおよび第2取付板12の主面12aの所定領域に蓄光材料からなるシートを貼り付けることによって形成することができる。
マーカ3は、任意の形状とすることができる。図9の例では、マーカ3はL字形状を有している。マーカ3が配置される領域は、サンプル1を支持するホルダ10の表面であって、サンプル1の外周部分であればよい。マーカ3の個数は4個に限定されるものではない。
次に、図3のステップS30により、コントローラ50は、応力発光体2および4個のマーカ3に対して、光源31から励起光を照射する。応力発光体2および4個のマーカ3はともに、励起光を受けて発光状態に遷移する。
次に、図3のステップS40に進み、コントローラ50は、第1ドライバ20を駆動させてサンプル1を折り曲げることにより、サンプル1に曲げ荷重を印加する。図3のステップS50では、コントローラ50は、サンプル1に対する荷重印加のタイミングに合わせて、カメラ40によりサンプル1を撮像する。コントローラ50は、取得される撮像画像をディスプレイ60に表示させることができる。
図10には、図3のステップS50により取得される撮像画像の変化を模式的に示される。図10(A)には荷重印加前のサンプル1およびその撮像画像が示される。図10(B)および(C)には荷重印加中のサンプル1およびその撮像画像が示される。
図10(A)に示すように、サンプル1に荷重が印加されていない状態(曲げ角度θ=0°の状態)では、応力発光体2が未だ発光していない。そのため、撮像画像P1には、4個のマーカ3の発光(残光)のみが現れている。撮像画像P1における4個のマーカ3の発光の位置は、矩形形状のサンプル1の四隅の位置に対応している。
次に、サンプル1に曲げ荷重が印加されると、撮像画像P1には、応力発光体2の発光が現れる。したがって、図10(B)に示すように、撮像画像P1には、応力発光体2の発光と4個のマーカ3の発光とが現れる。ただし、応力発光体2の発光と4個のマーカ3の発光とは波長(発光色)が異なるため、撮像画像P1において応力発光体2の発光と4個のマーカ3の発光とを明確に識別することができる。
サンプル1の曲げ角度θが大きくなるに従って、サンプル1の上方に配置されたカメラ40(図示せず)から見た4個のマーカ3の位置が変化する。具体的には、図10(B)に示すように、Y方向に並べて配置される2個のマーカ3の距離が短くなる。図10(C)に示すように、サンプル1の曲げ角度θ=90°に達したとき、撮像画像P1における2個のマーカ3の距離が最も短くなる。
撮像画像P1において4個のマーカ3の位置は、サンプル1の四隅の位置をそれぞれ表わしている。したがって、撮像画像P1における4個のマーカ3の位置に基づいて、サンプル1の形状を推測できるため、サンプル1の変形状態を取得することができる。その結果、実施の形態1と同様に、撮像画像P1に現れる応力発光パターン200を抽出することにより、応力発光パターン200が示す応力発光強度の分布と、サンプル1の変形状態とを紐付けることができる。
[実施の形態3]
図11は、実施の形態3に係るひずみ計測装置の全体構成を示すブロック図である。実施の形態3に係るひずみ計測装置100は、図1に示すひずみ計測装置100と比較して、荷重印加機構の構成が異なる。図1に示すひずみ計測装置100と共通する部分についての説明は繰返さない。
図11は、実施の形態3に係るひずみ計測装置の全体構成を示すブロック図である。実施の形態3に係るひずみ計測装置100は、図1に示すひずみ計測装置100と比較して、荷重印加機構の構成が異なる。図1に示すひずみ計測装置100と共通する部分についての説明は繰返さない。
図11を参照して、荷重印加機構は、サンプル1に圧縮荷重を印加するように構成される。具体的には、荷重印加機構は、ホルダ10と、第1ドライバ20とを有する。
図11の例では、サンプル1は、円形の形状を有する平板部材である。サンプル1の表面には、応力発光体2が配置されている。応力発光体2は、少なくともサンプル1の所定領域の表面上に配置されている。この所定領域は、サンプル1に圧縮荷重を印加したときに応力が生じる領域(すなわち、サンプル1の変形領域)を含むように設定されている。よって、応力発光体2は、サンプル1と一体的に圧縮されて変形(ひずみ)が生じることになる。
ホルダ10は、ホルダ10は、第1支持部材16、第2支持部材17および駆動軸18を有する。第1支持部材16および第2支持部材17は、柱状の形状を有しており、長手方向における端部同士がY方向に沿って対向するように配置されている。
第1支持部材16には駆動軸18が接続されている。第1ドライバ20は、駆動軸18の基部が取り付けられる。第1ドライバ20は、駆動軸18をY方向にスライドさせることにより、第1支持部材16をY方向にスライド可能に構成されている。第2支持部材17は固定されている。第1支持部材16は「可動部」の一実施例に対応し、第2支持部材17は「固定部」の一実施例に対応する。
サンプル1は、Y方向における両端部が第1支持部材16および第2支持部材17によって支持されている。この状態で第1支持部材16を第2支持部材17に向かってY方向にスライドさせると、サンプル1に対して圧縮荷重が印加される。
カメラ40は、サンプル1の所定領域上に位置する応力発光体2およびマーカ3を撮像視野に含むように配置される。
<ひずみ計測方法>
次に、実施の形態3に係るひずみ計測装置100を用いたサンプル1のひずみ計測方法について説明する。実施の形態3に係るひずみ計測装置100を用いたサンプル1のひずみ計測の処理手順は、マーカを配置する処理(S20)を除いて図3に示したフローチャートと基本的に同じである。
次に、実施の形態3に係るひずみ計測装置100を用いたサンプル1のひずみ計測方法について説明する。実施の形態3に係るひずみ計測装置100を用いたサンプル1のひずみ計測の処理手順は、マーカを配置する処理(S20)を除いて図3に示したフローチャートと基本的に同じである。
最初に図3のステップS10により、サンプル1が準備される。サンプル1は、ホルダ10の第1支持部材16および第2支持部材17の間に取り付けられる。応力発光体2は、サンプル1の表面に接着される。図11の例では、応力発光体2は、サンプル1と同程度のサイズの円形の形状を有しており、サンプル1の表面の全域を覆うように配置されている。
次に図3のステップS20により、ホルダ10にマーカ3が配置される。具体的には、第1支持部材16および第2支持部材17の少なくとも一方の表面にマーカ3が配置される。図11の例では、マーカ3は、第1支持部材16の表面に配置されている。マーカ3は、第1支持部材16の表面の所定領域に蓄光塗料を塗布することにより形成することができる。あるいは、マーカ3は、第1支持部材16の表面の所定領域に蓄光材料からなるシートを貼り付けることによって形成することができる。
マーカ3は、蓄光体により形成されており、目盛りを構成する。この目盛りは、サンプル1のZ方向における大きさを計測するための指標として用いることができる。指標としての機能を果たすために、マーカ3は、荷重印加時に撮像画像P1における形状が変化しない領域に配置される。マーカ3は、第2支持部材17の表面に配置されていてもよい。
図3のステップS30では、コントローラ50は、応力発光体2およびマーカ3に対して、光源31から励起光を照射する。応力発光体2およびマーカ3はともに励起光を受けて発光状態に遷移する。なお、励起光の照射を停止した後も、マーカ3は発光し続ける。
次に、図3のステップS40に進み、コントローラ50は、第1ドライバ20を駆動させてサンプル1に対して荷重を印加する。第1ドライバ20によって第1支持部材16をY方向にスライドさせることにより、サンプル1に圧縮荷重が印加される。
図3のステップS50では、コントローラ50は、サンプル1に対する荷重印加のタイミングに合わせて、カメラ40によりサンプル1を撮像する。カメラ40は、応力発光体2の発光およびマーカ3の発光を撮像する。コントローラ50は、カメラ40による撮像画像をディスプレイ60に表示させることができる。
図12は、図3のステップS50により取得される撮像画像P1の変化を模式的に示す図である。図12(A)には、荷重印加前のサンプル1およびその撮像画像が模式的に示される。図12(B)には、荷重印加中のサンプル1およびその撮像画像が模式的に示される。
図12(A)および図12(B)は、第1支持部材16、第2支持部材17およびこれらに取り付けられたサンプル1をX軸方向から見た様子を示している。図12(B)は、図12(A)の状態からサンプル1に圧縮荷重を印加した状態を示している。なお、図11に示したように、サンプル1の表面には応力発光体2が配置されており、第1支持部材16の表面にはマーカ3(目盛り)が配置されている。
図12(A)に示すように、サンプル1に圧縮荷重が印加されていない状態では、応力発光体2が未だ発光していない。そのため、撮像画像P1には、マーカ3の発光のみが現れている。
図12(A)の状態から第1ドライバ20によって第1支持部材16をY方向にスライドさせると、図12(B)に示すように、サンプル1はY方向に圧縮されて変形する。そのため、撮像画像P1には、応力発光体2の発光とマーカ3の発光とが現れる。
このとき、図12(B)に示すように、サンプル1のY方向における長さは、初期値であるY1からY2に減少する。一方、サンプル1のZ方向における長さは、初期値であるZ1からZ2に増加する。
圧縮荷重によるサンプル1のY方向における変形量は、第1支持部材16のY方向における変位量から求めることができる。これに対して、サンプル1のZ方向における変形量は、撮像画像P1内でマーカ3が示す目盛りを用いて求めることができる。これによると、圧縮荷重によるサンプル1の変形状態を取得することができる。さらに、実施の形態1および2と同様に、撮像画像P1に現れる応力発光パターン200を抽出することにより、応力発光パターン200が示す応力発光強度の分布と、サンプル1の変形状態とを紐付けることができる。
[態様]
上述した複数の例示的な実施形態は、以下の態様の具体例であることが当業者により理解される。
上述した複数の例示的な実施形態は、以下の態様の具体例であることが当業者により理解される。
(第1項)一態様に係るひずみ計測装置は、サンプルのひずみを計測する。サンプルの表面の少なくとも所定領域には応力発光体が配置されている。ひずみ計測装置は、サンプルを支持するホルダと、ホルダを動作させることにより、サンプルに荷重を印加する荷重印加機構と、ホルダの表面に配置された、蓄光性を有するマーカと、応力発光体およびマーカに励起光を照射するように構成された光源と、荷重が印加されたときの応力発光体の発光、およびマーカの発光を撮像するように構成されたカメラとを備える。
第1項に記載のひずみ計測装置によれば、サンプルの表面に応力発光体を配置するとともに、サンプルを支持するホルダの表面に蓄光性を有するマーカを配置することにより、暗所での応力発光の測定時において、マーカの発光に基づいてサンプルの変形状態を取得することができる。
(第2項)第1項に記載のひずみ計測装置において、マーカは、蓄光体で構成されている。蓄光体は、発光の波長が励起光の波長とは異なるように構成される。
これによると、光源から励起光の照射を停止した後において、マーカの発光を受けて応力発光体が励起され続けることを抑制することができる。よって、応力発光体の応力発光を正確に計測することが可能となる。
(第3項)第2項に記載のひずみ計測装置において、励起光は、紫外線または青色光である。マーカは、赤色の発光を示す蓄光体から構成される。
これによると、光源から励起光の照射を停止した後において、マーカの発光を受けて応力発光体が励起され続けることを抑制することができる。
(第4項)第2項または第3項に記載のひずみ計測装置において、蓄光体はさらに、発光の波長が応力発光体の発光の波長とは異なるように構成される。
これによると、カメラによる撮像画像において応力発光体の発光とマーカの発光とを明確に識別することができる。
(第5項)第1項から第4項に記載のひずみ計測装置において、ホルダは、固定部および可動部を含み、固定部に対して可動部が相対移動することによってサンプルに荷重を印加するように構成される。マーカは、ホルダの可動部に配置される。
これによると、撮像画像に現れるマーカの位置および/または形状が可動部の動きに応じて変化する。このマーカの位置および/または形状の変化とサンプルの変形状態との関係を予め取得しておくことにより、マーカの変化に基づいてサンプルの変形状態を取得することができる。
(第6項)第1項から第4項に記載のひずみ計測装置において、マーカは、ホルダの表面においてサンプルの外周部分に配置される。
これによると、撮像画像に現れるマーカの位置に基づいてサンプルの形状を推測することができるため、サンプルの変形状態を取得することができる。
(第7項)第1項から第4項に記載のひずみ計測装置において、マーカは、サンプルの大きさを計測するための目盛りを含む。
これによると、撮像画像内でマーカが示す目盛りを用いて、サンプルの変形量を測定することができる。
(第8項)一態様に係るひずみ計測方法は、サンプルのひずみを計測するひずみ計測方法であって、サンプルの表面の少なくとも所定領域に応力発光体を配置するステップと、サンプルを支持するホルダの表面に蓄光性を有するマーカを配置するステップと、応力発光体およびマーカに励起光を照射するステップと、ホルダを動作させることにより、サンプルに荷重を印加するステップと、荷重が印加されたときの応力発光体の発光、およびマーカの発光を撮像するステップとを備える。
第8項に記載のひずみ計測方法によれば、サンプルの表面に応力発光体を配置するとともに、サンプルを支持するホルダの表面に蓄光性を有するマーカを配置することにより、暗所での応力発光の測定時において、マーカの発光に基づいてサンプルの変形状態を取得することができる。
(第9項)第8項に記載のひずみ計測方法は、撮像するステップにて取得された撮像画像におけるマーカの発光に基づいて、サンプルの変形状態を測定するステップをさらに備える。
これによると、測定されたサンプルの変形状態と、応力発光強度の分布とを紐付けることができる。よって、サンプルがどのような変形状態であるときに、サンプル1にひずみが生じたのかを検証することができる。また、応力発光強度の分布の時系列変化とサンプルの変形状態の時系列変化との相関関係を評価することが可能となる。
(第10項)第8項または第9項に記載のひずみ計測方法において、ホルダは、固定部および可動部を含む。荷重を印加するステップは、固定部に対して可動部を相対移動させることによってサンプルに荷重を印加するステップを含む。マーカを配置するステップは、ホルダの可動部にマーカを配置するステップを含む。
これによると、撮像画像に現れるマーカの位置および/または形状が可動部の動きに応じて変化する。このマーカの位置および/または形状の変化とサンプルの変形状態との関係を予め取得しておくことにより、マーカの変化に基づいてサンプルの変形状態を取得することができる。
(第11項)第8項または第9項に記載のひずみ計測方法において、マーカを配置するステップは、ホルダの表面においてサンプルの外周部分にマーカを配置するステップを含む。
これによると、撮像画像に現れるマーカの位置に基づいてサンプルの形状を推測することができるため、サンプルの変形状態を取得することができる。
(第12項)第8項または第9項に記載のひずみ計測方法において、マーカを配置するステップは、サンプルの大きさを計測するための目盛りを配置するステップを含む。
これによると、撮像画像内でマーカが示す目盛りを用いて、サンプルの変形量を測定することができる。
(第13項)第8項から第12項に記載のひずみ計測方法において、励起光を照射するステップは、共通の光源を用いて応力発光体およびマーカに同時に励起光を照射するステップを含む。
これによると、ひずみ計測装置の構成を簡素にできるとともに、ひずみ計測処理を簡素化することができる。
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した実施の形態の説明ではなくて請求の範囲によって示され、請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
1 サンプル、2 応力発光体、3 マーカ、10 ホルダ、11 第1取付板、12 第2取付板、13,18 駆動軸、15 筐体、16 第1支持部材、17 第2支持部材、20 第1ドライバ、31 光源、32 第3ドライバ、40 カメラ、42 第2ドライバ、50 コントローラ、60 ディスプレイ、61 応力制御部、62 光源制御部、63 撮像制御部、64 測定制御部、65 データ取得部、66 データ処理部、70 操作部、100 ひずみ計測装置、200 応力発光パターン、501 プロセッサ、502 メモリ、503 入出力I/F、504 通信I/F、P1 撮像画像。
Claims (13)
- サンプルのひずみを計測するひずみ計測装置であって、
前記サンプルの表面の少なくとも所定領域には応力発光体が配置されており、
前記サンプルを支持するホルダと、
前記ホルダを動作させることにより、前記サンプルに荷重を印加する荷重印加機構と、
前記ホルダの表面に配置された、蓄光性を有するマーカと、
前記応力発光体および前記マーカに励起光を照射するように構成された光源と、
前記荷重が印加されたときの前記応力発光体の発光、および前記マーカの発光を撮像するように構成されたカメラとを備える、ひずみ計測装置。 - 前記マーカは、蓄光体で構成されており、
前記蓄光体は、発光の波長が前記励起光の波長とは異なるように構成される、請求項1に記載のひずみ計測装置。 - 前記励起光は、紫外線または青色光であり、
前記マーカは、赤色の発光を示す前記蓄光体から構成される、請求項2に記載のひずみ計測装置。 - 前記蓄光体はさらに、発光の波長が前記応力発光体の発光の波長とは異なるように構成される、請求項2または3に記載のひずみ計測装置。
- 前記ホルダは、固定部および可動部を含み、前記固定部に対して前記可動部が相対移動することによって前記サンプルに荷重を印加するように構成され、
前記マーカは、前記ホルダの前記可動部に配置される、請求項1から4のいずれか1項に記載のひずみ計測装置。 - 前記マーカは、前記ホルダの表面において前記サンプルの外周部分に配置される、請求項1から4のいずれか1項に記載のひずみ計測装置。
- 前記マーカは、前記サンプルの大きさを計測するための目盛りを含む、請求項1から4のいずれか1項に記載のひずみ計測装置。
- サンプルのひずみを計測するひずみ計測方法であって、
前記サンプルの表面の少なくとも所定領域に応力発光体を配置するステップと、
前記サンプルを支持するホルダの表面に蓄光性を有するマーカを配置するステップと、
前記応力発光体および前記マーカに励起光を照射するステップと、
前記ホルダを動作させることにより、前記サンプルに荷重を印加するステップと、
前記荷重が印加されたときの前記応力発光体の発光、および前記マーカの発光を撮像するステップとを備える、ひずみ計測方法。 - 前記撮像するステップにて取得された撮像画像における前記マーカの発光に基づいて、前記サンプルの変形状態を測定するステップをさらに備える、請求項8に記載のひずみ計測方法。
- 前記ホルダは、固定部および可動部を含み、
前記荷重を印加するステップは、前記固定部に対して前記可動部を相対移動させることによって前記サンプルに荷重を印加するステップを含み、
前記マーカを配置するステップは、前記ホルダの前記可動部に前記マーカを配置するステップを含む、請求項8または9に記載のひずみ計測方法。 - 前記マーカを配置するステップは、前記ホルダの表面において前記サンプルの外周部分に前記マーカを配置するステップを含む、請求項8または9に記載のひずみ計測方法。
- 前記マーカを配置するステップは、前記サンプルの大きさを計測するための目盛りを配置するステップを含む、請求項8または9に記載のひずみ計測方法。
- 前記励起光を照射するステップは、共通の光源を用いて前記応力発光体および前記マーカに同時に励起光を照射するステップを含む、請求項8から12のいずれか1項に記載のひずみ計測方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022522547A JP7332044B2 (ja) | 2020-05-15 | 2021-03-26 | ひずみ計測装置およびひずみ計測方法 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020085770 | 2020-05-15 | ||
| JP2020-085770 | 2020-05-15 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021229929A1 true WO2021229929A1 (ja) | 2021-11-18 |
Family
ID=78525659
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/012814 WO2021229929A1 (ja) | 2020-05-15 | 2021-03-26 | ひずみ計測装置およびひずみ計測方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7332044B2 (ja) |
| WO (1) | WO2021229929A1 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5923649U (ja) * | 1982-08-05 | 1984-02-14 | 大起理化工業株式会社 | 土壌抵抗測定器 |
| US20150103333A1 (en) * | 2013-10-10 | 2015-04-16 | GunJin Yun | Apparatus for quantitative measurements of stress distributions from mechanoluminescence materials |
| JP2017129530A (ja) * | 2016-01-22 | 2017-07-27 | 日本碍子株式会社 | 変位検出器及び変位の検出方法 |
| JP2018163083A (ja) * | 2017-03-27 | 2018-10-18 | 株式会社トヨタプロダクションエンジニアリング | 歪み測定装置、歪み測定方法及び歪み測定プログラム |
| JP2020034466A (ja) * | 2018-08-31 | 2020-03-05 | 株式会社トヨタプロダクションエンジニアリング | 応力発光計測装置及び応力発光計測方法 |
-
2021
- 2021-03-26 JP JP2022522547A patent/JP7332044B2/ja active Active
- 2021-03-26 WO PCT/JP2021/012814 patent/WO2021229929A1/ja active Application Filing
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5923649U (ja) * | 1982-08-05 | 1984-02-14 | 大起理化工業株式会社 | 土壌抵抗測定器 |
| US20150103333A1 (en) * | 2013-10-10 | 2015-04-16 | GunJin Yun | Apparatus for quantitative measurements of stress distributions from mechanoluminescence materials |
| JP2017129530A (ja) * | 2016-01-22 | 2017-07-27 | 日本碍子株式会社 | 変位検出器及び変位の検出方法 |
| JP2018163083A (ja) * | 2017-03-27 | 2018-10-18 | 株式会社トヨタプロダクションエンジニアリング | 歪み測定装置、歪み測定方法及び歪み測定プログラム |
| JP2020034466A (ja) * | 2018-08-31 | 2020-03-05 | 株式会社トヨタプロダクションエンジニアリング | 応力発光計測装置及び応力発光計測方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7332044B2 (ja) | 2023-08-23 |
| JPWO2021229929A1 (ja) | 2021-11-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2021179354A (ja) | 応力発光測定装置および応力発光測定方法 | |
| CN106501227B (zh) | 基于压力敏感涂料探针分子荧光寿命的测量方法 | |
| WO2016087939A1 (en) | Automated test systems and methods for light-emitting arrays | |
| EP1930719A1 (en) | Coaxial light radiating device | |
| WO2021229929A1 (ja) | ひずみ計測装置およびひずみ計測方法 | |
| CN116222846A (zh) | 应力测量方法、装置以及计算机可读非暂时性存储介质 | |
| JP7334664B2 (ja) | 応力発光測定方法および応力発光測定装置 | |
| US20210372868A1 (en) | Stress management device | |
| WO2021240947A1 (ja) | 応力測定装置 | |
| WO2020230473A1 (ja) | 応力発光測定装置、応力発光測定方法および応力発光測定システム | |
| WO2021157656A1 (ja) | フレキシブルディスプレイ搭載製品の検査方法、フレキシブルディスプレイ搭載製品の製造方法、フレキシブルディスプレイ搭載製品の検査システムおよびフレキシブルディスプレイ搭載製品 | |
| US12035895B2 (en) | Geometric light source apparatus with dimming features for endoscope | |
| WO2022003848A1 (ja) | 検査方法、検査システムおよび応力発光測定装置 | |
| JP5203172B2 (ja) | ひずみゲージ | |
| JP7099634B2 (ja) | 応力発光測定装置、応力発光測定方法および応力発光測定システム | |
| JP5168049B2 (ja) | 画像処理方法および画像処理装置 | |
| JP2022061564A (ja) | 接着剤の接着強さ試験方法、接着剤の接着強さ試験装置および接着剤の接着強さ試験システム | |
| JP7240731B2 (ja) | 静電気可視化用材料、静電気可視化膜、静電気分布可視化装置および静電気分布可視化方法 | |
| CN113973159A (zh) | 图像扫描系统和扫描方法 | |
| WO2018230318A1 (ja) | スケール、撮像装置、撮像システム、キット、および撮像装置の調整方法 | |
| JP2021004752A (ja) | 応力発光測定装置、応力発光測定方法および応力発光測定システム | |
| JP2021004753A (ja) | 応力発光測定装置、応力発光測定方法および応力発光測定システム | |
| JP2024011291A (ja) | 試験用シート、試験用シートの製造方法および計測方法 | |
| WO2023008361A1 (ja) | 二次元分光装置、観察システム、管理システム、情報処理装置及びプログラム | |
| US20230417678A1 (en) | Method of producing stress-luminescent material, method of producing stress-luminescent body, strain measurement method, stress-luminescent body, stress-luminescent coating material, and device for producing stress-luminescent body |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21803010 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2022522547 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21803010 Country of ref document: EP Kind code of ref document: A1 |