WO2021161421A1 - ロータ、電動機、送風機および空気調和装置 - Google Patents
ロータ、電動機、送風機および空気調和装置 Download PDFInfo
- Publication number
- WO2021161421A1 WO2021161421A1 PCT/JP2020/005361 JP2020005361W WO2021161421A1 WO 2021161421 A1 WO2021161421 A1 WO 2021161421A1 JP 2020005361 W JP2020005361 W JP 2020005361W WO 2021161421 A1 WO2021161421 A1 WO 2021161421A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- rotor
- magnetic pole
- slit
- rotor core
- virtual
- Prior art date
Links
Images
















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2706—Inner rotors
- H02K1/272—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis
- H02K1/274—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets
- H02K1/2753—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets the rotor consisting of magnets or groups of magnets arranged with alternating polarity
- H02K1/276—Magnets embedded in the magnetic core, e.g. interior permanent magnets [IPM]
- H02K1/2766—Magnets embedded in the magnetic core, e.g. interior permanent magnets [IPM] having a flux concentration effect
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/12—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets
- H02K21/14—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating within the armatures
- H02K21/16—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating within the armatures having annular armature cores with salient poles
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24F—AIR-CONDITIONING; AIR-HUMIDIFICATION; VENTILATION; USE OF AIR CURRENTS FOR SCREENING
- F24F1/00—Room units for air-conditioning, e.g. separate or self-contained units or units receiving primary air from a central station
- F24F1/0007—Indoor units, e.g. fan coil units
- F24F1/0018—Indoor units, e.g. fan coil units characterised by fans
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24F—AIR-CONDITIONING; AIR-HUMIDIFICATION; VENTILATION; USE OF AIR CURRENTS FOR SCREENING
- F24F1/00—Room units for air-conditioning, e.g. separate or self-contained units or units receiving primary air from a central station
- F24F1/06—Separate outdoor units, e.g. outdoor unit to be linked to a separate room comprising a compressor and a heat exchanger
- F24F1/38—Fan details of outdoor units, e.g. bell-mouth shaped inlets or fan mountings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2706—Inner rotors
- H02K1/272—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis
- H02K1/274—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets
- H02K1/2746—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets the rotor consisting of magnets arranged with the same polarity, e.g. consequent pole type
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2706—Inner rotors
- H02K1/272—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis
- H02K1/274—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets
- H02K1/2753—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets the rotor consisting of magnets or groups of magnets arranged with alternating polarity
- H02K1/276—Magnets embedded in the magnetic core, e.g. interior permanent magnets [IPM]
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/28—Means for mounting or fastening rotating magnetic parts on to, or to, the rotor structures
- H02K1/30—Means for mounting or fastening rotating magnetic parts on to, or to, the rotor structures using intermediate parts, e.g. spiders
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24F—AIR-CONDITIONING; AIR-HUMIDIFICATION; VENTILATION; USE OF AIR CURRENTS FOR SCREENING
- F24F1/00—Room units for air-conditioning, e.g. separate or self-contained units or units receiving primary air from a central station
- F24F1/06—Separate outdoor units, e.g. outdoor unit to be linked to a separate room comprising a compressor and a heat exchanger
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2201/00—Specific aspects not provided for in the other groups of this subclass relating to the magnetic circuits
- H02K2201/03—Machines characterised by aspects of the air-gap between rotor and stator
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2213/00—Specific aspects, not otherwise provided for and not covered by codes H02K2201/00 - H02K2211/00
- H02K2213/03—Machines characterised by numerical values, ranges, mathematical expressions or similar information
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K29/00—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices
- H02K29/03—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices with a magnetic circuit specially adapted for avoiding torque ripples or self-starting problems
Definitions
- This disclosure relates to rotors, motors, blowers and air conditioners.
- the rotor of an electric motor includes a concave pole type rotor having a magnetic pole composed of a permanent magnet and a virtual magnetic pole composed of a rotor core (see, for example, Patent Document 1). Since the number of permanent magnets in the concave pole type rotor is half that of a normal rotor, there is an advantage that the manufacturing cost can be reduced.
- the virtual magnetic pole does not have a permanent magnet
- the magnetic flux density is lower than that of the magnet magnetic pole, and the direction in which the magnetic flux flows tends to fluctuate. Therefore, an imbalance occurs in the magnetic flux between the magnetic pole and the virtual pole, which causes vibration and noise.
- the present disclosure has been made to solve the above problems, and an object of the present disclosure is to reduce vibration and noise in a sequential pole type rotor.
- the rotor of the present disclosure has an outer circumference extending in the circumferential direction about the axis, and has a rotor core having a magnet insertion hole and a permanent magnet arranged in the magnet insertion hole.
- a permanent magnet constitutes a magnetic pole
- a portion of the rotor core constitutes a virtual pole.
- the circumferential width of the virtual pole is narrower than the circumferential width of the permanent magnet.
- the rotor core has at least one slit in the virtual magnetic pole.
- the width of the virtual magnetic pole is narrower than the width of the permanent magnet, the magnetic flux tends to concentrate on the virtual magnetic pole, and the magnetic flux density becomes high. Further, since the virtual magnetic pole is provided with at least one slit, the direction of the magnetic flux passing through the virtual magnetic pole can be corrected. As a result, the imbalance of magnetic flux between the magnetic pole and the virtual pole can be suppressed, and vibration and noise can be reduced.
- FIG. 1 It is sectional drawing which shows the electric motor of Embodiment 1.
- FIG. It is sectional drawing which shows the rotor of Embodiment 1.
- FIG. It is sectional drawing which shows the rotor core and the permanent magnet of Embodiment 1.
- FIG. It is sectional drawing for demonstrating the width of the magnet magnetic pole and the width of the virtual magnetic pole of Embodiment 1.
- FIG. It is a schematic diagram which shows the magnet insertion hole and the slit in the rotor core of Embodiment 1.
- FIG. It is a magnetic flux diagram which shows the simulation result of the magnetic flux flow in the rotor of Embodiment 1.
- FIG. 1 It is a schematic diagram which shows the flow of the magnetic flux when the distance between a slit and the outer circumference of a rotor core is lengthened. It is a schematic diagram which shows the flow of the magnetic flux when the void part is not provided inside the magnet insertion hole in the radial direction. It is a schematic diagram for demonstrating the action of the void part of Embodiment 1. FIG. It is a schematic diagram for demonstrating the radial length of the slit and the void part of Embodiment 1. FIG. It is a schematic diagram which shows the example which made the length in the radial direction of a slit longer than the length in a radial direction of a gap part.
- FIG. It is a schematic diagram for demonstrating the flow of the magnetic flux in the example of FIG. It is a schematic diagram for demonstrating the arrangement of the caulking part of Embodiment 1.
- FIG. It is a magnetic flux diagram which shows the simulation result of the magnetic flux flow in the electric motor of Embodiment 1.
- FIG. It is sectional drawing which shows the rotor of Embodiment 2.
- FIG. It is a schematic diagram for demonstrating the arrangement of the magnet insertion hole, the slit, the gap part and the caulking part of Embodiment 2.
- It is a front view (A) which shows the air conditioner to which the motor of each embodiment is applied, and is the sectional view (B) which shows the outdoor unit.
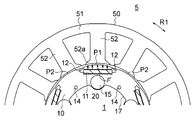
- FIG. 1 is a cross-sectional view showing the electric motor 100 of the first embodiment.
- the electric motor 100 is an inner rotor type electric motor including a rotatable rotor 1 and an annular stator 5 provided so as to surround the rotor 1.
- the electric motor 100 is also a permanent magnet embedded motor in which the permanent magnet 20 is embedded in the rotor 1.
- An air gap of, for example, 0.4 mm is provided between the stator 5 and the rotor 1.
- the rotation center axis of the rotor 1 will be the axis C1.
- the direction of the axis C1 is referred to as "axial direction”.
- the circumferential direction around the axis C1 (indicated by the arrow R1 in FIG. 1) is referred to as a "circumferential direction”.
- the radial direction centered on the axis C1 is referred to as a "diameter direction”.
- FIG. 1 is a cross-sectional view of a plane orthogonal to the axis C1 of the rotor 1.
- the stator 5 has a stator core 50 and a coil 55 wound around the stator core 50.
- the stator core 50 is formed by laminating a plurality of electromagnetic steel sheets in the axial direction and fixing them by caulking or the like.
- the thickness of the electromagnetic steel sheet is, for example, 0.1 mm to 0.7 mm.
- the stator core 50 has an annular yoke 51 centered on the axis C1 and a plurality of teeth 52 extending radially inward from the yoke 51.
- the teeth 52 are arranged at equal intervals in the circumferential direction.
- the number of teeth 52 is twelve here, but is not limited to twelve.
- a slot, which is a space for accommodating the coil 55, is formed between the adjacent teeth 52.
- the radial inner tip 52a of the teeth 52 is wider in the circumferential direction than the other parts of the teeth 52.
- the tip portion 52a of the teeth 52 faces the outer periphery of the rotor 1 via the air gap described above.
- An insulator 53 as an insulating portion is attached to the stator core 50.
- the insulator 53 is interposed between the stator core 50 and the coil 55 to insulate the stator core 50 and the coil 55.
- the insulator 53 is made of an insulating resin such as polybutylene terephthalate (PBT), for example.
- PBT polybutylene terephthalate
- the insulator 53 is formed by molding the resin integrally with the stator core 50 or by assembling a resin molded body molded as a separate component to the stator core 50.
- the coil 55 is wound around the teeth 52 via the insulator 53.
- the coil 55 is made of copper or aluminum.
- the coil 55 may be wound around each tooth 52 (concentrated winding), or may be wound across a plurality of teeth 52 (distributed winding).
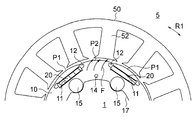
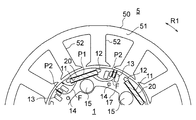
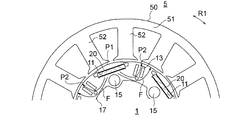
- FIG. 2 is a cross-sectional view showing the rotor 1.
- FIG. 3 is a diagram showing a rotor core 10 and a permanent magnet 20 of the rotor 1.
- the rotor 1 includes a shaft 25 which is a rotation shaft, a rotor core 10 provided on the radial outer side of the shaft 25, a plurality of permanent magnets 20 embedded in the rotor core 10, and a shaft 25 and a rotor core. It has a resin portion 30 provided between the 10 and the resin portion 30.
- the rotor core 10 is an annular member centered on the axis C1.
- the rotor core 10 has an outer circumference 16 and an inner circumference 17. Both the outer peripheral circumference 16 and the inner peripheral circumference 17 extend in the circumferential direction centered on the axis C1.
- the rotor core 10 is formed by laminating a plurality of electromagnetic steel sheets in the axial direction and fixing them by a caulking portion 14.
- the thickness of the electromagnetic steel sheet is, for example, 0.1 mm to 0.7 mm.
- the rotor core 10 has a plurality of magnet insertion holes 11.
- the magnet insertion holes 11 are arranged equidistantly in the circumferential direction and equidistant from the axis C1.
- the number of magnet insertion holes 11 is 5 here.
- the magnet insertion hole 11 is formed along the outer circumference of the rotor core 10.
- the magnet insertion hole 11 extends linearly in a direction orthogonal to a radial straight line (magnetic pole center line) passing through the center in the circumferential direction.
- the magnet insertion hole 11 is not limited to such a shape, and may be, for example, a V-shape.
- Flux barriers 12 which are holes, are formed on both sides of the magnet insertion hole 11 in the circumferential direction.
- the iron core portion between the flux barrier 12 and the outer peripheral 16 of the rotor core 10 is a thin-walled portion (also referred to as a bridge portion). In order to suppress the leakage flux between the adjacent magnetic poles, it is desirable that the thickness of the thin portion is the same as the thickness of the electromagnetic steel plate constituting the rotor core 10.
- a permanent magnet 20 is inserted into each magnet insertion hole 11.
- the permanent magnet 20 has a flat plate shape, and the cross-sectional shape orthogonal to the axial direction is rectangular.
- the permanent magnet 20 is composed of, for example, a rare earth magnet. More specifically, the permanent magnet 20 is composed of a neodymium sintered magnet containing Nd (neodymium) -Fe (iron) -B (boron).
- the five permanent magnets 20 have the same magnetic poles (for example, N poles) on the outer side in the radial direction.
- magnetic poles for example, S poles
- S poles opposite to the magnetic poles are formed between the permanent magnets 20 adjacent to each other in the circumferential direction.
- the rotor 1 is formed with five magnetic poles P1 composed of permanent magnets 20 and five virtual magnetic poles P2 composed of the rotor core 10. Such a configuration is called a sequential pole type. In the following, when the term "magnetic pole” is simply used, it is assumed that both the magnetic pole P1 and the virtual pole P2 are included. Here, the rotor 1 has 10 magnetic poles.
- Both the magnetic pole P1 and the virtual pole P2 have a polar center in the circumferential direction.
- the radial straight line passing through the polar center of the magnetic pole P1 is defined as the magnetic pole center line M1.
- the radial straight line passing through the pole center of the virtual magnetic pole P2 is defined as the magnetic pole center line M2.
- the outer circumference 16 of the rotor core 10 has a so-called flower circle shape in a cross section orthogonal to the axial direction. More specifically, the outer circumference 16 of the rotor core 10 has a shape in which the outer diameter is the maximum at the pole centers of the magnetic poles P1 and P2, the outer diameter is the smallest between the poles, and the arc shape is formed from the pole center to the poles. Have.
- the outer circumference 16 of the rotor core 10 is not limited to a flower circle shape, but may be a circular shape.
- the number of permanent magnets 20 can be halved as compared with the non-consequent pole type rotor having the same number of poles. Since the number of permanent magnets 20 is small, the manufacturing cost of the rotor 1 is reduced.
- the number of poles of the rotor 1 is 10, but the number of poles may be an even number of 4 or more.
- one permanent magnet 20 is arranged in one magnet insertion hole 11 here, two or more permanent magnets 20 may be arranged in one magnet insertion hole 11.
- the magnet magnetic pole P1 may be the S pole and the virtual magnetic pole P2 may be the N pole.
- a non-magnetic resin portion 30 is provided between the shaft 25 and the rotor core 10.
- the resin portion 30 connects the shaft 25 and the rotor core 10.
- the resin portion 30 is formed of, for example, a thermoplastic resin such as PBT.
- the resin portion 30 includes a plurality of annular inner cylinder portions 31 in contact with the outer periphery of the shaft 25, an annular outer cylinder portion 33 in contact with the inner circumference 17 of the rotor core 10, and a plurality of inner cylinder portions 31 and outer cylinder portions 33. It has a rib 32 and.
- a shaft 25 penetrates the inner cylinder portion 31 of the resin portion 30 in the axial direction.
- the ribs 32 are arranged at equal intervals in the circumferential direction, and extend radially outward from the inner cylinder portion 31.
- a cavity is formed between the ribs 32 adjacent to each other in the circumferential direction.
- the number of ribs 32 is half the number of poles, and the circumferential position of each rib 32 coincides with the pole center of the virtual magnetic pole P2. However, the number of ribs 32 is not limited to half the number of poles. Further, the circumferential position of the rib 32 may coincide with the polar center of the magnet magnetic pole P1.
- the rotor core 10 has at least one slit 13 in the virtual magnetic pole P2.
- two slits 13a arranged on both sides in the circumferential direction of the magnetic pole center line M2 and two slits 13b arranged on both sides in the circumferential direction of the two slits 13a are formed.
- Both the slits 13a and 13b extend in the radial direction, more specifically, in parallel with the magnetic pole center line M2. That is, the lengths of the slits 13a and 13b in the radial direction are longer than the width in the circumferential direction.
- the two slits 13a have the same shape as each other and are arranged equidistantly in the circumferential direction from the magnetic pole center line M2.
- the two slits 13b have the same shape as each other and are arranged equidistantly in the circumferential direction from the magnetic pole center line M2. That is, the four slits 13a and 13b are arranged symmetrically with respect to the magnetic pole center line M2.
- the radial length of the slit 13a is shorter than the radial length of the slit 13b.
- the circumferential width of the slit 13a is narrower than the circumferential width of the slit 13b.
- the radial outer end of the slit 13a is located radially outer than the radial outer end of the slit 13b.
- the virtual magnetic pole P2 has four slits 13a and 13b here, at least one slit 13 may be provided.
- slits 13 when it is not necessary to distinguish between the slits 13a and 13b, these are referred to as slits 13.
- the rotor core 10 has a gap 15 inside the magnet insertion hole 11 in the radial direction.
- the gap portion 15 is located on the magnetic pole center line M1 of the magnetic pole P1.
- the gap portion 15 has a circular shape on a plane orthogonal to the axial direction.
- the shape of the gap portion 15 is not limited to a circular shape, and may be a slit shape (see FIG. 21).
- a protruding portion 17a protruding inward in the radial direction is formed in the portion where the gap portion 15 is formed.
- the protruding portion 17a of the inner circumference 17 extends in an arc shape along the inner circumference of the gap portion 15.
- the protruding portion 17a functions as a rotation stopper for the rotor core 10 with respect to the resin portion 30.
- such a protruding portion 17a may not be formed on the inner circumference 17.
- the caulking portion 14 is for integrally fixing a plurality of electromagnetic steel sheets constituting the rotor core 10. It is desirable that the caulking portion 14 is formed on the magnetic pole center line M2 of the virtual magnetic pole P2 on the inner side in the radial direction with respect to the slit 13. However, the caulking portion 14 may be formed in another portion.
- the caulking portion 14 has a circular shape on a plane orthogonal to the axial direction. That is, the caulking portion 14 is a round caulking portion.
- the shape of the crimped portion 14 is not limited to a circular shape, and may be a rectangular shape. That is, the caulking portion 14 may be a V caulking portion (see FIG. 21).
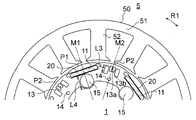
- FIG. 4 is a cross-sectional view for explaining the circumferential width of the permanent magnet 20 and the circumferential width of the virtual magnetic pole P2.
- the circumferential width W1 of the permanent magnet 20 is, here, the circumferential length (distance from one end to the other end in the circumferential direction) of the radial outer surface of the permanent magnet 20.
- the circumferential width W2 of the virtual magnetic pole P2 is the distance from the flux barrier 12 located on one side of the virtual magnetic pole P2 in the circumferential direction to the flux barrier 12 located on the other side of the virtual magnetic pole P2 in the circumferential direction. Is.
- the circumferential width W2 of the virtual magnetic pole P2 is narrower than the circumferential width W1 of the permanent magnet 20. That is, W2 ⁇ W1 is established.
- widths W1 and W2 are not limited to the width in the circumferential direction. That is, the width W1 of the permanent magnet 20 may be the width in the direction orthogonal to the magnetic pole center line M1 (FIG. 3), and the width W2 of the virtual magnetic pole P2 may be the width in the direction orthogonal to the magnetic pole center line M2 (FIG. 3). May be. In this case as well, W2 ⁇ W1 holds.
- FIG. 5 is a schematic view showing the arrangement of the magnet insertion holes 11 and the slits 13 in the rotor core 10.
- the distance L1 from the magnet insertion hole 11 at the pole center to the outer circumference 16 of the rotor core 10 is shorter than the shortest distance L2 from the slit 13 to the outer circumference 16 of the rotor core 10.
- the shortest distance L2 is the distance from the slit 13a located on the outer peripheral 16 side of the slits 13a and 13b to the outer peripheral 16 of the rotor core 10.
- FIG. 6 is a magnetic flux diagram showing a simulation result of the flow of magnetic flux in the rotor 1.
- the magnetic flux emitted from the permanent magnet 20 of the magnetic pole P1 spreads symmetrically about the magnetic pole center line M1. This magnetic flux passes through the adjacent virtual magnetic poles P2 in the radial direction and returns to the permanent magnet 20 of the magnet magnetic poles P1.
- the magnetic flux emitted from the permanent magnet 20 passes through the virtual magnetic pole P2, if the width W2 of the virtual magnetic pole P2 is narrowed with respect to the width W1 of the permanent magnet 20, the magnetic flux is concentrated on the virtual magnetic pole P2, and the virtual magnetic pole is concentrated.
- the magnetic flux density at P2 becomes high.
- FIG. 7A is a graph showing the magnetic flux density distribution on the outer circumference of the rotor 1 obtained by actually measuring the magnetic flux density.
- the vertical axis is the magnetic flux density [mT]
- the horizontal axis is the circumferential position, that is, the angle [degree] about the axis C1.
- FIG. 7B is a schematic view showing the positions of the magnetic poles P1 and the virtual magnetic poles P2 corresponding to the magnetic flux density distribution of FIG. 7A.
- the magnetic flux density (that is, the surface magnetic flux density) on the outer circumference of the rotor 1 appears positive on the magnet magnetic pole P1 and negative on the virtual magnetic pole P2.
- the surface magnetic flux density zero-crosses at a position corresponding to the flux barrier 12.
- the surface magnetic flux density decreases at the respective pole centers of the magnetic pole P1 and the virtual pole P2 because the magnetic flux spreads symmetrically with respect to the magnetic pole center line (see FIG. 6).
- the magnet magnetic pole P1 has a permanent magnet 20, but the virtual magnetic pole P2 does not have a permanent magnet. Therefore, the surface magnetic flux density at the virtual magnetic pole P2 is lower than the surface magnetic flux density at the magnet magnetic pole P1.
- the low surface magnetic flux density of the virtual magnetic pole P2 with respect to the surface magnetic flux density of the magnet magnetic pole P1 causes vibration and noise of the rotor 1. This is because the magnetic attraction force acting between the virtual magnetic pole P2 and the teeth 52 is smaller than the magnetic attraction force acting between the magnet magnetic pole P1 and the teeth 52, so that the radial force applied to the rotor 1 is small. Is unbalanced, and a radial excitation force acts on the rotor 1.
- the magnetic magnetic pole P1 receives a circumferential force from the front teeth 52 and the rear teeth 52 in the rotation direction
- the virtual magnetic pole P2 receives the front teeth 52 and the rear teeth 52 in the rotation direction.
- the force in the circumferential direction received from is different. Therefore, the circumferential force applied to the rotor 1 becomes unbalanced, and torque ripple occurs in the rotor 1.
- the concentration of the magnetic flux on the virtual magnetic pole P2 is promoted.
- the surface magnetic flux density of is high. Therefore, the above-mentioned radial excitation force and torque ripple can be reduced, and vibration and noise can be reduced.
- the operation of the slit 13 will be described. As described above, even if the width W2 of the virtual magnetic pole P2 is narrower than the width W1 of the permanent magnet 20, the magnetic flux density at the virtual magnetic pole P2 does not reach the magnetic flux density at the magnet magnetic pole P1. , The magnetic flux passing through the virtual magnetic pole P2 tends to bend in the circumferential direction.
- FIG. 8 is a schematic view showing the flow of magnetic flux from the permanent magnet 20 of the magnet magnetic pole P1.
- the radial outside of the permanent magnet 20 is the north pole.
- the magnetic flux generated from the magnet magnetic pole P1 tends to travel outward in the radial direction as shown by the arrow F.
- FIG. 9 is a schematic view showing the flow of magnetic flux in the virtual magnetic pole P2 when the slit 13 is not provided in the virtual magnetic pole P2.
- the inside of the permanent magnet 20 in the radial direction is the north pole. Therefore, in the virtual magnetic pole P2, the magnetic flux flows from the inside in the radial direction to the inside and outside in the radial direction.
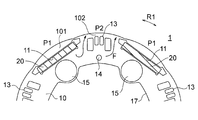
- FIG. 10 is a schematic view showing the arrangement of the slits 13 in the virtual magnetic pole P2 of the first embodiment.
- the rotor core 10 of the first embodiment has at least one slit 13 in the virtual magnetic pole P2. Further, the distance L1 from the magnet insertion hole 11 at the pole center to the outer circumference 16 of the rotor core 10 is shorter than the shortest distance L2 from the slit 13 to the outer circumference 16 of the rotor core 10.
- a core region 101 through which magnetic flux flows is formed between the magnet insertion hole 11 of the magnet magnetic pole P1 and the outer circumference 16 of the rotor core 10.
- a core region 102 through which magnetic flux flows is formed between the slit 13 of the virtual magnetic pole P2 and the outer circumference 16 of the rotor core 10.
- FIG. 11 is a schematic diagram for explaining the operation of the slit 13 in the virtual magnetic pole P2 of the first embodiment.
- the magnetic flux flowing through the virtual magnetic pole P2 tends to bend in the circumferential direction according to the position of the teeth 52 (FIG. 9) facing the virtual magnetic pole P2.
- the slit 13 is formed in the virtual magnetic pole P2
- the flow of magnetic flux at the virtual magnetic pole P2 can be rectified.
- the difference in surface magnetic flux density between the magnet magnetic pole P1 and the virtual magnetic pole P2 can be reduced, and the vibration and noise described above can be reduced.
- FIG. 12 is a cross-sectional view showing a non-consequential pole type rotor 1C.
- the rotor 1C has a rotor core 110 having a magnet insertion hole 111 and a permanent magnet 120 inserted into the magnet insertion hole 111.
- a shaft (not shown) is inserted into the center hole 117 of the rotor core 110.
- Adjacent permanent magnets 120 have magnetic pole surfaces that are opposite to each other on the outer side in the radial direction. That is, all the magnetic poles of the rotor 1C are formed by the magnet magnetic poles P.
- the distance L1 from the magnet insertion hole 111 to the outer circumference 116 of the rotor core 110 is constant at all magnetic poles.
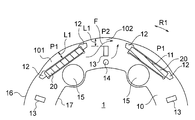
- FIG. 13 shows a configuration example in which the shortest distance from the slit 13 to the outer circumference 16 is the same as the distance L1 from the magnet insertion hole 11 at the pole center to the outer circumference 16 in the sequential pole type rotor.
- One slit 13 is shown for each virtual magnetic pole P2.
- the shortest distance from the slit 13 to the outer circumference 16 is the same as the distance L1 from the magnet insertion hole 11 to the outer circumference 16 at the polar center, so that the core region 102 on the outer side in the radial direction of the slit 13 Becomes wider. Therefore, the magnetic flux generated from the permanent magnet 20 tends to flow in the circumferential direction in the core region 102 of the virtual magnetic pole P2 as shown by the arrow F.
- the shortest distance L2 from the slit 13 to the outer circumference 16 of the rotor core 10 is shorter than the distance L1 from the magnet insertion hole 11 at the polar center to the outer circumference 16 of the rotor core 10. Therefore, as shown in FIG. 11, the core region 102 on the outer side in the radial direction of the slit 13 becomes narrow, and it becomes difficult for the magnetic flux to flow in the core region 102 in the circumferential direction. Therefore, the effect of bringing the magnetic flux flow in the virtual magnetic pole P2 closer to the radial direction, that is, the effect of rectifying the magnetic flux flow can be enhanced.
- the shortest distance L2 from the slit 13 to the outer circumference 16 is desirable in order to enhance the effect of rectifying the flow of magnetic flux, but it is difficult to make the distance L2 less than the thickness of the electromagnetic steel sheet in terms of processing. Therefore, the lower limit of the distance L2 is the thickness of the electromagnetic steel plate of the rotor core 10.
- FIG. 14 is a schematic view showing the flow of magnetic flux when the gap portion 15 is not formed inside the magnet insertion hole 11 in the radial direction.
- the magnetic flux emitted from the radial inside of the permanent magnet 20 of the magnet magnetic pole P1 flows to the teeth 52 through the two virtual magnetic poles P2 on both sides in the circumferential direction.
- a gap portion 15 is formed inside the magnet insertion hole 11 in the radial direction.
- the magnetic flux emitted from the radial inside of the permanent magnet 20 is evenly distributed to both sides in the circumferential direction by the gap portion 15.
- the magnetic flux generated from the permanent magnet 20 flows evenly in the circumferential direction regardless of the position of the teeth 52.
- the gap portion 15 is located on the magnetic pole center line M1.
- the distance T1 between the gap portion 15 and the magnet insertion hole 11 and the distance T2 between the gap portion 15 and the inner circumference 17 are eventually set.
- the diversion of the magnetic flux emitted from the radial inside of the permanent magnet 20 has been described, but when the radial inside of the permanent magnet 20 is the S pole, the magnetic flux flowing from both sides in the circumferential direction of the permanent magnet 20 is described. , The gap portion 15 evenly flows into the permanent magnet 20 in the circumferential direction. That is, the gap portion 15 can suppress the bias of the magnetic flux emitted from the permanent magnet 20 and the magnetic flux flowing into the permanent magnet 20.
- FIG. 16 is a schematic view for explaining the radial lengths of the slit 13 and the gap 15 of the rotor core 10.
- the slit 13 has a maximum radial length L3.
- the radial length of the slit 13b is set to the maximum length L3.
- the gap portion 15 has a maximum length L4 in the radial direction.
- the maximum length L4 of the gap portion 15 is the diameter of the gap portion 15.
- the maximum length L3 of the slit 13 is shorter than the maximum length L4 of the gap portion 15.
- FIG. 17 is a schematic view showing an example in which the maximum radial length L3 of the slit 13 is made longer than the maximum radial length L4 of the gap portion 15. As shown in FIG. 17, when the maximum radial length L3 of the slit 13 is made longer than the maximum radial length L4 of the gap portion 15, the slit 13 extends inward in the radial direction.
- the lengthening of the magnetic path in the rotor core 10 leads to an increase in iron loss, which contributes to a decrease in motor efficiency.
- the permanent magnet 20 passes through the virtual magnetic pole P2.
- the magnetic path toward the teeth 52 can be shortened, and an increase in iron loss can be suppressed.
- FIG. 19 is a schematic view for explaining the arrangement of the caulking portion 14 in the rotor core 10.
- the plurality of electrical steel sheets constituting the rotor core 10 are integrally fixed by the caulking portion 14.
- the caulking portion 14 is formed by pressing a caulking metal fitting against the surface of an electromagnetic steel plate. When stress is applied to electrical steel sheets, their magnetic properties change and iron loss increases. Therefore, if the caulked portion 14 is formed in the magnetic path, it causes an increase in iron loss.
- the caulking portion 14 is arranged inside the circle 18 (virtual circle) connecting the radial outer ends 15e of the gap portion 15.
- the magnetic flux generated from the permanent magnet 20 of the magnet magnetic pole P1 is diverted to both sides in the circumferential direction by the gap portion 15 and heads toward the virtual magnetic pole P2. Therefore, the amount of magnetic flux flowing is small in the region inside the circle 18 defined by the radial outer end portion 15e of the gap portion 15.
- the crimped portion 14 is arranged in the inner region of the circle 18, the magnetic flux passing through the crimped portion 14 is small. That is, it is possible to suppress an increase in iron loss due to the flow of magnetic flux through the crimped portion 14.
- the caulking portion 14 is formed inside the virtual magnetic pole P2 in the radial direction in FIG. 19, it may be formed at another position as long as it is inside the circle 18. Further, although the caulking portion 14 is a round caulking portion in FIG. 19, it may be a V caulking portion (FIG. 21) or a caulking portion having another shape.
- FIG. 20 is a magnetic flux diagram showing a simulation result of the flow of magnetic flux in the motor 100 of the first embodiment. From FIG. 20, it can be seen that the magnetic flux flowing through the virtual magnetic pole P2 tends to bend in the circumferential direction according to the position of the teeth 52, but is rectified by the slit 13 so that the flow of the magnetic flux approaches the radial direction.
- the magnetic flux is suppressed from flowing in the circumferential direction in the virtual magnetic pole P2. I understand.
- the magnetic flux emitted from the permanent magnet 20 is evenly divided in the circumferential direction by the gap portion 15, and the bias of the magnetic flux is suppressed. It can also be seen that the magnetic flux passing through the caulking portion 14 is small.
- a permanent magnet 20 having an N pole on the inside in the radial direction and a permanent magnet 20 having an S pole on the inside in the radial direction are adjacent to each other in the circumferential direction.
- the magnetic flux generated from the north pole of 20 flows to the south pole of the adjacent permanent magnet 20.
- a non-magnetic resin portion 30 is provided between the rotor core 10 and the shaft 25.
- the rotor 1 of the first embodiment has a rotor core 10 having a magnet insertion hole 11 and a permanent magnet 20 arranged in the magnet insertion hole 11, and the magnet magnetic pole P1 is formed by the permanent magnet 20.
- the virtual magnetic pole P2 is formed by a part of the rotor core 10.
- the circumferential width W2 of the virtual magnetic pole P2 is narrower than the circumferential width W1 of the permanent magnet 20, and at least one slit 13 is formed in the virtual magnetic pole P2.
- the magnetic flux can be concentrated on the virtual magnetic pole P2 and the magnetic flux density in the virtual magnetic pole P2 can be increased. Further, since the direction of the magnetic flux flowing through the virtual magnetic pole P2 can be brought closer to the radial direction by the one slit 13 provided in the virtual magnetic pole P2, the imbalance of the magnetic flux between the magnet magnetic pole P1 and the virtual magnetic pole P2 can be reduced. Can be done. As a result, vibration and noise can be reduced.
- the direction of the magnetic flux flowing through the virtual magnetic pole P2 is the diameter.
- the effect of approaching the direction is further enhanced, and the effect of reducing vibration and noise can be enhanced.
- the gap portion 15 is formed inside the magnet insertion hole 11 in the radial direction, the bias of the magnetic flux emitted from the permanent magnet 20 and the magnetic flux flowing into the permanent magnet 20 is suppressed, and the effect of reducing vibration and noise is further enhanced. Can be enhanced.
- the maximum radial length L3 of the slit 13 is shorter than the maximum radial length L4 of the gap portion 15, the magnetic path passing through the virtual magnetic pole P2 can be shortened, and an increase in iron loss can be suppressed. can do.
- the caulking portion 14 is formed inside the circle 18 passing through the radial outer end portion 15e of the gap portion 15, it is possible to suppress an increase in iron loss due to the magnetic flux passing through the caulking portion 14. can.
- the slit 13 extends in the radial direction, the effect of bringing the direction of the magnetic flux flowing through the virtual magnetic pole P2 closer to the radial direction can be enhanced.
- the plurality of slits 13a and 13b are formed symmetrically with respect to the magnetic pole center line M2, the effect of bringing the direction of the magnetic flux flowing through the virtual magnetic pole P2 closer to the radial direction can be further enhanced.
- the non-magnetic resin portion 30 is provided between the rotor core 10 and the shaft 25, the leakage flux from the rotor core 10 to the shaft 25, which is peculiar to the sequential pole type rotor, is effectively suppressed. be able to.
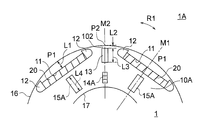
- FIG. 21 is a cross-sectional view showing a rotor core 10A and a permanent magnet 20 of the rotor 1A of the second embodiment.
- the rotor 1A of the second embodiment is different from the rotor 1 of the first embodiment in the shape and arrangement of the slit 13, the gap portion 15A and the caulking portion 14A of the rotor core 10A.
- each virtual magnetic pole P2 two slits 13 long in the radial direction are formed in each virtual magnetic pole P2.
- the two slits 13 have the same shape as each other, and are formed on both sides of the magnetic pole center line M2 in the circumferential direction at equal distances from the magnetic pole center line M2.
- the number of slits 13 of each virtual magnetic pole P2 is not limited to two, and may be one (FIG. 22) or three or more. Twice
- the gap portion 15A formed inside the magnet insertion hole 11 in the radial direction has a slit shape long in the radial direction. It is desirable that the gap portion 15A is formed on the magnetic pole center line M1.
- the caulking portion 14A is formed inside a circle 18 connecting the radial outer ends of the gap portion 15A.
- the caulking portion 14A is a V caulking portion.
- the V-caulking portion is formed by pressing a V-shaped caulking metal fitting against the surface of an electromagnetic steel plate. Therefore, the crimped portion 14A has a rectangular shape in a plane orthogonal to the axial direction.
- the caulking portion 14A is formed on the magnetic pole center line M2 of the virtual magnetic pole P2 so that the longitudinal direction coincides with the radial direction. This is because when the caulking portion 14A is arranged in this way, the magnetic flux passing through the caulking portion 14A is minimized (see FIG. 20), and the increase in iron loss can be effectively suppressed.
- the outer circumference 16 and the inner circumference 17 of the rotor core 10A are both circular around the axis C1.
- the outer circumference 16 may have a flower-round shape (FIG. 4) like the outer circumference 16 of the rotor core 10 of the first embodiment.
- the inner circumference 17 may have a protruding portion 17a (FIG. 4) like the inner circumference 17 of the rotor core 10 of the first embodiment.
- FIG. 22 is a schematic view for explaining the arrangement of the slit 13, the gap portion 15A, and the caulking portion 14A of the second embodiment.
- the shortest distance L2 from the slit 13 to the outer circumference 16 of the rotor core 10A is shorter than the distance L1 from the magnet insertion hole 11 at the polar center to the outer circumference 16 of the rotor core 10A.
- the maximum radial length L3 of the slit 13 is shorter than the maximum radial length L4 of the gap portion 15A.
- the rotor 1A of the second embodiment is configured in the same manner as the rotor 1 of the first embodiment except for the shape and arrangement of the slit 13, the gap portion 15A and the caulking portion 14A.
- the slit 13 is formed in the virtual magnetic pole P2
- the direction of the magnetic flux flowing through the virtual magnetic pole P2 can be brought closer to the radial direction.
- the imbalance of magnetic flux between the magnetic pole P1 and the virtual pole P2 can be reduced, and vibration and noise can be reduced.
- the shortest distance L2 from the slit 13 to the outer circumference 16 of the rotor core 10A is shorter than the distance L1 from the magnet insertion hole 11 at the pole center to the outer circumference 16 of the rotor core 10A, it is difficult for the magnetic flux to flow in the circumferential direction on the virtual magnetic pole P2. Therefore, the effect of reducing vibration and noise can be further enhanced.
- the gap portion 15A is formed inside the magnet insertion hole 11 in the radial direction, the magnetic flux emitted from the permanent magnet 20 flows evenly in the circumferential direction, the imbalance of the magnetic flux is suppressed, and the effect of reducing vibration and noise is achieved. Can be further enhanced.
- the rotor 1 of the first embodiment may be combined with a part of the rotor 1A of the second embodiment.
- the slit-shaped gap portion 15A of the rotor 1A of the second embodiment may be provided.
- the caulking portion 14 (round caulking portion) of the rotor 1 of the first embodiment the caulking portion 14A (V caulking portion) of the rotor 1A of the second embodiment may be provided.
- a crimped portion 14B having a triangular in-plane shape orthogonal to the axial direction may be formed inside the circle 18 (FIG. 21) of the rotor core 10A.
- the arrangement of the caulking portion 14B shown in FIG. 23 is the same as that of the caulking portion 14A shown in FIGS. 21 and 22.
- FIG. 24A is a diagram showing a configuration of an air conditioner 500 to which the motor 100 of the first embodiment is applied.
- the air conditioner 500 includes an outdoor unit 501, an indoor unit 502, and a refrigerant pipe 503 connecting them.
- the outdoor unit 501 includes, for example, an outdoor blower 510 which is a propeller fan
- the indoor unit 502 includes, for example, an indoor blower 520 which is a cross-flow fan.
- the outdoor blower 510 has an impeller 505 and an electric motor 100A for driving the impeller 505.
- the indoor blower 520 has an impeller 521 and an electric motor 100B for driving the impeller 521.
- the motors 100A and 100B are composed of the motors 100 described in the first embodiment. Note that FIG. 24A also shows a compressor 504 that compresses the refrigerant.
- FIG. 24B is a cross-sectional view of the outdoor unit 501.
- the electric motor 100A is supported by a frame 509 arranged in the housing 508 of the outdoor unit 501.
- An impeller 505 is attached to the shaft 25 of the motor 100A via a hub 506.
- the impeller 505 rotates due to the rotation of the rotor 1 of the electric motor 100A, and air is blown to the heat exchanger (not shown).
- the heat released when the refrigerant compressed by the compressor 504 is condensed by the heat exchanger (condenser) is released to the outside by the blower of the outdoor blower 510.
- the impeller 521 is rotated by the rotation of the rotor 1 of the motor 100B to blow air into the room.
- the air conditioner 500 the air whose heat has been taken away when the refrigerant evaporates in the evaporator (not shown) is blown into the room by the blower of the indoor blower 520.
- the quietness of the blowers 510 and 520 can be improved. Thereby, the quietness of the air conditioner 500 can be improved.
- the motor 100 of the first embodiment is used for the motor 100A of the outdoor blower 510 and the motor 100B of the indoor blower 520, but if at least one of the motors 100A and 100B uses the motor 100 of the first embodiment. good. Further, instead of the electric motor 100 of the first embodiment, an electric motor provided with the rotor 1A (FIG. 21) of the second embodiment may be used.
- the motor 100 described in the first and second embodiments can be mounted on an electric device other than the blower of the air conditioner.
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Permanent Field Magnets Of Synchronous Machinery (AREA)
- Iron Core Of Rotating Electric Machines (AREA)
Abstract
ロータは、軸線を中心とする周方向に延在する外周を有し、磁石挿入孔を有するロータコアと、磁石挿入孔に配置された永久磁石とを有する。永久磁石によって磁石磁極が構成され、ロータコアの一部によって仮想磁極が構成される。仮想磁極の周方向の幅は、永久磁石の周方向の幅よりも狭い。ロータコアは、仮想磁極に少なくとも一つのスリットを有する。
Description
本開示は、ロータ、電動機、送風機および空気調和装置に関する。
電動機のロータには、永久磁石で構成される磁石磁極と、ロータコアで構成される仮想磁極とを備えたコンシクエントポール型のロータがある(例えば、特許文献1参照)。コンシクエントポール型のロータは、永久磁石の数が通常のロータと比べて半分であるため、製造コストを低減できるメリットがある。
しかしながら、仮想磁極は永久磁石を有さないため、磁石磁極と比較して磁束密度が低く、磁束の流れる方向も変動しやすい。そのため、磁石磁極と仮想磁極とで磁束にアンバランスが生じ、これにより振動および騒音が発生する。
本開示は、上記の課題を解決するためになされたものであり、コンシクエントポール型のロータにおける振動および騒音の低減を目的とする。
本開示のロータは、軸線を中心とする周方向に延在する外周を有し、磁石挿入孔を有するロータコアと、磁石挿入孔に配置された永久磁石とを有する。永久磁石によって磁石磁極が構成され、ロータコアの一部によって仮想磁極が構成される。仮想磁極の周方向の幅は、永久磁石の周方向の幅よりも狭い。ロータコアは、仮想磁極に少なくとも一つのスリットを有する。
本開示によれば、永久磁石の幅に対して仮想磁極の幅が狭いため、仮想磁極に磁束が集中しやすくなり、磁束密度が高くなる。また、仮想磁極に少なくとも一つのスリットが設けられているため、仮想磁極を通過する磁束の方向を矯正することができる。これにより、磁石磁極と仮想磁極とにおける磁束のアンバランスを抑制し、振動および騒音を低減することができる。
実施の形態1.
<電動機の構成>
図1は、実施の形態1の電動機100を示す断面図である。電動機100は、回転可能なロータ1と、ロータ1を囲むように設けられた環状のステータ5とを備えたインナロータ型の電動機である。電動機100は、また、ロータ1に永久磁石20を埋め込んだ永久磁石埋込型電動機でもある。ステータ5とロータ1との間には、例えば0.4mmのエアギャップが設けられている。
<電動機の構成>
図1は、実施の形態1の電動機100を示す断面図である。電動機100は、回転可能なロータ1と、ロータ1を囲むように設けられた環状のステータ5とを備えたインナロータ型の電動機である。電動機100は、また、ロータ1に永久磁石20を埋め込んだ永久磁石埋込型電動機でもある。ステータ5とロータ1との間には、例えば0.4mmのエアギャップが設けられている。
以下では、ロータ1の回転中心軸を軸線C1とする。軸線C1の方向を、「軸方向」と称する。軸線C1を中心とする周方向(図1に矢印R1で示す)を、「周方向」と称する。軸線C1を中心とする半径方向を、「径方向」と称する。なお、図1は、ロータ1の軸線C1に直交する面における断面図である。
<ステータの構成>
ステータ5は、ステータコア50と、ステータコア50に巻き付けられたコイル55とを有する。ステータコア50は、複数の電磁鋼板を軸方向に積層し、カシメ等により固定したものである。電磁鋼板の板厚は、例えば0.1mm~0.7mmである。
ステータ5は、ステータコア50と、ステータコア50に巻き付けられたコイル55とを有する。ステータコア50は、複数の電磁鋼板を軸方向に積層し、カシメ等により固定したものである。電磁鋼板の板厚は、例えば0.1mm~0.7mmである。
ステータコア50は、軸線C1を中心とする環状のヨーク51と、ヨーク51から径方向内側に延在する複数のティース52とを有する。ティース52は、周方向に等間隔に配置されている。ティース52の数は、ここでは12であるが、12に限定されるものではない。隣り合うティース52の間には、コイル55を収容する空間であるスロットが形成される。
ティース52の径方向内側の先端部52aは、ティース52の他の部分よりも周方向の幅が広い。ティース52の先端部52aは、上述したエアギャップを介してロータ1の外周に対向する。
ステータコア50には、絶縁部としてのインシュレータ53が取り付けられている。インシュレータ53は、ステータコア50とコイル55との間に介在し、ステータコア50とコイル55とを絶縁するものである。
インシュレータ53は、例えば、ポリブチレンテレフタレート(PBT)等の絶縁性の樹脂で構成される。インシュレータ53は、樹脂をステータコア50と一体に成形するか、または別部品として成形した樹脂成形体をステータコア50に組み付けることで形成される。
コイル55は、インシュレータ53を介してティース52に巻き付けられる。コイル55は、銅またはアルミニウムで構成されている。コイル55は、ティース52毎に巻き付けてもよく(集中巻)、あるいは複数のティース52に跨って巻き付けてもよい(分布巻)。
<ロータの構成>
図2は、ロータ1を示す断面図である。図3は、ロータ1のロータコア10および永久磁石20を示す図である。図2に示すように、ロータ1は、回転軸であるシャフト25と、シャフト25の径方向外側に設けられたロータコア10と、ロータコア10に埋め込まれた複数の永久磁石20と、シャフト25とロータコア10との間に設けられた樹脂部30とを有する。
図2は、ロータ1を示す断面図である。図3は、ロータ1のロータコア10および永久磁石20を示す図である。図2に示すように、ロータ1は、回転軸であるシャフト25と、シャフト25の径方向外側に設けられたロータコア10と、ロータコア10に埋め込まれた複数の永久磁石20と、シャフト25とロータコア10との間に設けられた樹脂部30とを有する。
図3に示すように、ロータコア10は、軸線C1を中心とする環状の部材である。ロータコア10は、外周16と内周17とを有する。外周16および内周17は、いずれも、軸線C1を中心とする周方向に延在する。
ロータコア10は、複数の電磁鋼板を軸方向に積層し、カシメ部14によって固定したものである。電磁鋼板の板厚は、例えば0.1mm~0.7mmである。
ロータコア10は、複数の磁石挿入孔11を有する。磁石挿入孔11は、周方向に等間隔で、且つ軸線C1から等距離に配置されている。磁石挿入孔11の数は、ここでは5個である。磁石挿入孔11は、ロータコア10の外周に沿って形成されている。
磁石挿入孔11は、その周方向中心を通る径方向の直線(磁極中心線)に直交する方向に直線状に延在している。但し、磁石挿入孔11は、このような形状に限定されるものではなく、例えば、V字形状であってもよい。
磁石挿入孔11の周方向の両側には、穴部であるフラックスバリア12が形成されている。フラックスバリア12とロータコア10の外周16との間の鉄心部分は、薄肉部(ブリッジ部とも称する)となっている。隣り合う磁極間の漏れ磁束を抑制するため、薄肉部の厚さは、ロータコア10を構成する電磁鋼板の板厚と同じであることが望ましい。
各磁石挿入孔11には、永久磁石20が挿入されている。永久磁石20は平板状であり、軸方向に直交する断面形状は矩形状である。
永久磁石20は、例えば、希土類磁石で構成される。より具体的には、永久磁石20は、Nd(ネオジム)-Fe(鉄)-B(ホウ素)を含むネオジム焼結磁石で構成される。
5つの永久磁石20は、径方向外側に、互いに同一の磁極(例えばN極)を有する。ロータコア10において、周方向に隣り合う永久磁石20の間には、上記磁極とは反対の磁極(例えばS極)が形成される。
そのため、ロータ1には、永久磁石20で構成される5つの磁石磁極P1と、ロータコア10で構成される5つの仮想磁極P2とが形成される。このような構成を、コンシクエントポール型と称する。以下では、単に「磁極」という場合、磁石磁極P1と仮想磁極P2の両方を含むものとする。ここでは、ロータ1は、10個の磁極を有する。
磁石磁極P1および仮想磁極P2のいずれも、周方向中心が極中心となる。磁石磁極P1の極中心を通る径方向の直線を、磁極中心線M1とする。仮想磁極P2の極中心を通る径方向の直線を、磁極中心線M2とする。
ロータコア10の外周16は、軸方向に直交する断面において、いわゆる花丸形状を有する。より具体的には、ロータコア10の外周16は、磁極P1,P2のそれぞれの極中心で外径が最大となり、極間で外径が最小となり、極中心から極間までが弧状となる形状を有する。ロータコア10の外周16は、花丸形状に限らず、円形状であってもよい。
コンシクエントポール型のロータ1では、同じ極数の非コンシクエントポール型のロータと比較して、永久磁石20の数を半分にすることができる。永久磁石20の数が少ないため、ロータ1の製造コストが低減される。
ここではロータ1の極数を10としたが、極数は4以上の偶数であればよい。また、ここでは1つの磁石挿入孔11に1つの永久磁石20を配置しているが、1つの磁石挿入孔11に2つ以上の永久磁石20を配置してもよい。磁石磁極P1をS極とし、仮想磁極P2をN極としてもよい。
図2に示すように、シャフト25とロータコア10との間には、非磁性の樹脂部30が設けられている。樹脂部30は、シャフト25とロータコア10とを連結するものである。樹脂部30は、例えば、PBT等の熱可塑性樹脂で形成される。
樹脂部30は、シャフト25の外周に接する環状の内筒部31と、ロータコア10の内周17に接する環状の外筒部33と、内筒部31と外筒部33とを連結する複数のリブ32とを有する。
樹脂部30の内筒部31には、シャフト25が軸方向に貫通している。リブ32は、周方向に等間隔で配置され、内筒部31から径方向外側に放射状に延在している。周方向に隣り合うリブ32間には、空洞部が形成される。
リブ32の数は極数の半分であり、それぞれのリブ32の周方向位置が仮想磁極P2の極中心と一致している。但し、リブ32の数は、極数の半分に限定されるものではない。また、リブ32の周方向位置が磁石磁極P1の極中心と一致していてもよい。
図3に示すように、ロータコア10は、仮想磁極P2に、少なくとも一つのスリット13を有する。ここでは、磁極中心線M2の周方向両側に配置された2つのスリット13aと、2つのスリット13aの周方向両側に配置された2つのスリット13bとが形成されている。
スリット13a,13bは、いずれも、径方向、より具体的には磁極中心線M2と平行に延在している。すなわち、スリット13a,13bは、いずれも、径方向の長さが周方向の幅よりも長い。
2つのスリット13aは、互いに同じ形状を有し、磁極中心線M2から周方向に等距離に配置されている。同様に、2つのスリット13bは、互いに同じ形状を有し、磁極中心線M2から周方向に等距離に配置されている。すなわち、4つのスリット13a,13bは、磁極中心線M2に対して対称に配置されている。
スリット13aの径方向の長さは、スリット13bの径方向の長さよりも短い。スリット13aの周方向の幅は、スリット13bの周方向の幅よりも狭い。スリット13aの径方向外側の端部は、スリット13bよりも径方向外側の端部よりも、径方向外側に位置している。
なお、ここでは仮想磁極P2に4つのスリット13a,13bを有しているが、少なくとも一つのスリット13が設けられていればよい。以下では、スリット13a,13bを区別する必要がない場合には、これらをスリット13と称する。
ロータコア10は、磁石挿入孔11の径方向内側に、空隙部15を有する。空隙部15は、磁石磁極P1の磁極中心線M1上に位置している。空隙部15は、軸方向に直交する面において円形状を有する。但し、空隙部15の形状は円形状に限らず、スリット状でもよい(図21参照)。
ロータコア10の内周17において、空隙部15の形成された部分には、径方向内側に突出する突出部分17aが形成されている。内周17の突出部分17aは、空隙部15の内周に沿って円弧状に延在している。突出部分17aは、樹脂部30に対するロータコア10の回転止めとして機能する。但し、内周17には、このような突出部分17aが形成されていなくてもよい。
カシメ部14は、ロータコア10を構成する複数の電磁鋼板を一体に固定するためのものである。カシメ部14は、仮想磁極P2の磁極中心線M2上で、スリット13よりも径方向内側に形成することが望ましい。但し、カシメ部14を他の部分に形成してもよい。
カシメ部14は、軸方向に直交する面において円形状を有する。すなわち、カシメ部14は、丸カシメ部である。但し、カシメ部14の形状は、円形状に限らず、矩形状であってもよい。すなわち、カシメ部14は、Vカシメ部であってもよい(図21参照)。
図4は、永久磁石20の周方向の幅と、仮想磁極P2の周方向の幅を説明するための断面図である。永久磁石20の周方向の幅W1は、ここでは、永久磁石20の径方向外側の面の周方向の長さ(周方向の一端から他端までの距離)である。
仮想磁極P2の周方向の幅W2は、当該仮想磁極P2の周方向の一方の側に位置するフラックスバリア12から、当該仮想磁極P2の周方向の他方の側に位置するフラックスバリア12までの距離である。
仮想磁極P2の周方向の幅W2は、永久磁石20の周方向の幅W1よりも狭い。すなわち、W2<W1が成立する。
永久磁石20の幅W1に対して仮想磁極P2の幅W2を狭くすると、永久磁石20から出た多くの磁束が狭い仮想磁極P2を通過することとなるため、仮想磁極P2における磁束密度が高くなる。すなわち、仮想磁極P2が永久磁石を有さないことによる磁束密度の低下を、仮想磁極P2の幅W2を狭くすることによって補うことができる。
なお、幅W1,W2は、周方向の幅に限定されるものではない。すなわち、永久磁石20の幅W1を、磁極中心線M1(図3)に直交する方向の幅としてもよく、仮想磁極P2の幅W2を、磁極中心線M2(図3)に直交する方向の幅としてもよい。この場合も、W2<W1が成立する。
図5は、ロータコア10における磁石挿入孔11およびスリット13の配置を示す模式図である。極中心における磁石挿入孔11からロータコア10の外周16までの距離L1は、スリット13からロータコア10の外周16までの最短距離L2よりも短い。この例では、最短距離L2は、スリット13a,13bのうち、より外周16側に位置するスリット13aからロータコア10の外周16までの距離である。
<作用>
次に、実施の形態1の作用について説明する。図6は、ロータ1における磁束の流れのシミュレーション結果を示す磁束線図である。
次に、実施の形態1の作用について説明する。図6は、ロータ1における磁束の流れのシミュレーション結果を示す磁束線図である。
図6に示されているように、磁石磁極P1の永久磁石20から出た磁束は、磁極中心線M1を中心として対称に広がる。この磁束は、隣接する仮想磁極P2を径方向に通過して、磁石磁極P1の永久磁石20に戻る。
永久磁石20から出た磁束が仮想磁極P2を通過するため、永久磁石20の幅W1に対して仮想磁極P2の幅W2を狭くすると、それだけ仮想磁極P2に磁束が集中することになり、仮想磁極P2における磁束密度が高くなる。
図7(A)は、磁束密度の実測によって求めた、ロータ1の外周における磁束密度分布を示すグラフである。縦軸は磁束密度[mT]であり、横軸は周方向位置、すなわち軸線C1を中心とする角度[度]である。
図7(B)は、図7(A)の磁束密度分布に対応する磁石磁極P1および仮想磁極P2の位置を示す模式図である。
図7(A)において、ロータ1の外周における磁束密度(すなわち表面磁束密度)は、磁石磁極P1ではプラスで現れており、仮想磁極P2ではマイナスで現れている。表面磁束密度は、フラックスバリア12に相当する位置でゼロクロスする。なお、磁石磁極P1および仮想磁極P2のそれぞれの極中心で表面磁束密度が低下しているのは、磁束が磁極中心線に対して対称に広がるためである(図6参照)。
上述したように、磁石磁極P1は永久磁石20を有するが、仮想磁極P2は永久磁石を有さない。そのため、磁石磁極P1での表面磁束密度と比較すると、仮想磁極P2での表面磁束密度は低い。
磁石磁極P1での表面磁束密度に対して仮想磁極P2での表面磁束密度が低いことは、ロータ1の振動および騒音の原因となる。これは、磁石磁極P1とティース52との間に作用する磁気的吸引力よりも、仮想磁極P2とティース52との間に作用する磁気的吸引力が小さいため、ロータ1に加わる径方向の力がアンバランスになり、ロータ1に径方向加振力が作用するためである。
また、ロータ1が回転する際に、磁石磁極P1が回転方向の前方のティース52および後方のティース52から受ける周方向の力と、仮想磁極P2が回転方向の前方のティース52および後方のティース52から受ける周方向の力とが異なる。そのため、ロータ1に加わる周方向の力がアンバランスになり、ロータ1にトルクリップルが生じる。
そのため、磁石磁極P1での表面磁束密度に対して仮想磁極P2での表面磁束密度が低いほど、ロータ1に作用する径方向加振力およびトルクリップルが大きくなり、振動および騒音の原因となる。
図4を参照して説明したように、永久磁石20の幅W1に対して仮想磁極P2の幅W2を狭くすることにより、仮想磁極P2への磁束の集中が促進されるため、仮想磁極P2での表面磁束密度が高くなる。そのため、上述した径方向加振力およびトルクリップルを低減し、振動および騒音を低減することができる。
次に、スリット13の作用について説明する。上述したように仮想磁極P2の幅W2を永久磁石20の幅W1より狭くしても、仮想磁極P2での磁束密度は磁石磁極P1での磁束密度には達しないため、次に説明するように、仮想磁極P2を通過する磁束が周方向に曲がりやすい。
図8は、磁石磁極P1の永久磁石20からの磁束の流れを示す模式図である。ここでは、永久磁石20の径方向外側をN極としている。図8に示すように、磁石磁極P1では、磁束密度が高いため、磁石磁極P1から出た磁束は、矢印Fで示すように、径方向外側に進行しやすい。
図9は、仮想磁極P2にスリット13が設けられていない場合の、仮想磁極P2での磁束の流れを示す模式図である。ここでは、永久磁石20の径方向内側をN極としている。そのため、仮想磁極P2では、径方向内側から径方向内外側に向かって磁束が流れる。
しかしながら、仮想磁極P2での磁束密度が低いため、仮想磁極P2を流れる磁束は、仮想磁極P2に対向するティース52の位置に応じて、矢印Fで示すように、周方向に曲がりやすい。このような磁束の曲がりが生じると、上述した径方向加振力およびトルクリップルが大きくなり、振動および騒音の原因となる。
図10は、実施の形態1の仮想磁極P2におけるスリット13の配置を示す模式図である。上記の通り、実施の形態1のロータコア10は、仮想磁極P2に少なくとも一つのスリット13を有する。また、極中心における磁石挿入孔11からロータコア10の外周16までの距離L1は、スリット13からロータコア10の外周16までの最短距離L2よりも短い。
磁石磁極P1の磁石挿入孔11とロータコア10の外周16との間には、磁束が流れるコア領域101が形成される。仮想磁極P2のスリット13とロータコア10の外周16との間には、磁束が流れるコア領域102が形成される。
図11は、実施の形態1の仮想磁極P2におけるスリット13の作用を説明するための模式図である。仮想磁極P2を流れる磁束は、仮想磁極P2に対向するティース52(図9)の位置に応じて、周方向に曲がろうとする。
しかしながら、仮想磁極P2にスリット13が形成されているため、磁束が周方向に曲がることを抑制し、磁束の流れる方向を径方向に近付けることができる。言い換えると、仮想磁極P2における磁束の流れを整流することができる。これにより、磁石磁極P1と仮想磁極P2とでの表面磁束密度の差を低減することができ、上述した振動および騒音を低減することができる。
図12は、非コンシクエントポール型のロータ1Cを示す断面図である。ロータ1Cは、磁石挿入孔111を有するロータコア110と、磁石挿入孔111に挿入された永久磁石120とを有する。ロータコア110の中心孔117には、図示しないシャフトが挿入されている。隣り合う永久磁石120は、径方向外側に互いに反対の磁極面を有する。すなわち、ロータ1Cの全磁極が、磁石磁極Pで形成されている。磁石挿入孔111からロータコア110の外周116までの距離L1は、全磁極において一定である。
図13は、コンシクエントポール型のロータにおいて、スリット13から外周16までの最短距離を、極中心における磁石挿入孔11から外周16までの距離L1と同じにした構成例を示す。なお、スリット13は、各仮想磁極P2につき1つずつ示している。
図13に示した構成例では、スリット13から外周16までの最短距離が、極中心における磁石挿入孔11から外周16までの距離L1と同じであるため、スリット13の径方向外側のコア領域102が広くなる。そのため、永久磁石20から出た磁束が、矢印Fで示すように、仮想磁極P2のコア領域102を周方向に流れやすい。
これに対し、実施の形態1では、スリット13からロータコア10の外周16までの最短距離L2が、極中心における磁石挿入孔11からロータコア10の外周16までの距離L1よりも短い。そのため、図11に示したように、スリット13の径方向外側のコア領域102が狭くなり、磁束がコア領域102内を周方向に流れにくくなる。従って、仮想磁極P2における磁束の流れを径方向に近付ける効果、すなわち磁束の流れを整流する効果を高めることができる。
なお、スリット13から外周16までの最短距離L2は、磁束の流れを整流する効果を高めるためには短いほど望ましいが、当該距離L2を電磁鋼板の板厚未満にすることは、加工上難しい。そのため、当該距離L2の下限値は、ロータコア10の電磁鋼板の板厚となる。
次に、空隙部15の作用について説明する。図14は、磁石挿入孔11の径方向内側に空隙部15が形成されていない場合の磁束の流れを示す模式図である。磁石磁極P1の永久磁石20の径方向内側から出た磁束は、周方向両側の2つの仮想磁極P2を通って、ティース52に流れる。
このとき、一方の仮想磁極P2のティース52との対向面積が、他方の仮想磁極P2よりも大きい場合、ティース52との対向面積が大きい方のティース52に磁束が多く流れやすい。このような磁束の偏りが生じると、振動および騒音の原因となる。
実施の形態1では、図15に示すように、磁石挿入孔11の径方向内側に空隙部15が形成されている。空隙部15により、永久磁石20の径方向内側から出た磁束が、周方向の両側に均等に分流される。これにより、ティース52の位置に関わらず、永久磁石20から出た磁束が周方向に均等に流れる。
永久磁石20から出た磁束を均等に分流する効果を高めるためには、空隙部15は、磁極中心線M1上に位置していることが望ましい。
また、永久磁石20から出た磁束を均等に分流する効果をさらに高めるためには、空隙部15と磁石挿入孔11との間隔T1、および空隙部15と内周17との間隔T2は、いずれも狭いほど望ましい。但し、間隔T1,T2を電磁鋼板の板厚未満にすることは、加工上難しい。そのため、当該間隔T1,T2の下限値は、いずれも電磁鋼板の板厚となる。
ここでは、永久磁石20の径方向内側から出た磁束の分流について説明したが、永久磁石20の径方向内側がS極である場合には、永久磁石20の周方向両側から流れてきた磁束が、空隙部15により永久磁石20に周方向に均等に流入する。すなわち、空隙部15により、永久磁石20から出た磁束および永久磁石20に流入する磁束の偏りを抑制することができる。
図16は、ロータコア10のスリット13および空隙部15の径方向の長さを説明するための模式図である。スリット13は、径方向の最大長さL3を有する。ここでは、スリット13bがスリット13aよりも長いため、スリット13bの径方向の長さを最大長さL3とする。
空隙部15は、径方向の最大長さL4を有する。ここでは空隙部15が円形であるため、空隙部15の最大長さL4は、空隙部15の直径である。スリット13の最大長さL3は、空隙部15の最大長さL4より短い。
図17は、スリット13の径方向の最大長さL3を、空隙部15の径方向の最大長さL4よりも長くした例を示す模式図である。図17に示すように、スリット13の径方向の最大長さL3を、空隙部15の径方向の最大長さL4よりも長くすると、スリット13は径方向内側に伸びることになる。
そのため、図18に示すように、永久磁石20から出た磁束が仮想磁極P2を通過してティース52に向かう磁路が長くなる。ロータコア10内の磁路が長くなることは、鉄損の増加につながるため、電動機効率の低下の一因となる。
これに対し、図16に示したように、スリット13の径方向の最大長さL3が、空隙部15の径方向の最大長さL4より短ければ、永久磁石20から仮想磁極P2を通過してティース52に向かう磁路を短くすることができ、鉄損の増加を抑制することができる。
次に、カシメ部14の配置による作用について説明する。図19は、ロータコア10におけるカシメ部14の配置を説明するための模式図である。ロータコア10を構成する複数の電磁鋼板は、上記の通り、カシメ部14によって一体に固定されている。
カシメ部14は、電磁鋼板の表面にカシメ用金具を押し当てることによって形成される。電磁鋼板は応力が加わると磁気特性が変化し、鉄損が増加する。そのため、カシメ部14が磁路中に形成されると、鉄損の増加の原因となる。
そこで、実施の形態1では、図19に示すように、カシメ部14を、空隙部15の径方向外側の端部15eを結んだ円18(仮想円)の内側に配置している。
磁石磁極P1の永久磁石20から出た磁束は、空隙部15によって周方向両側に分流されて、仮想磁極P2に向かう。従って、空隙部15の径方向外側の端部15eで規定される円18の内側の領域では、磁束の流れる量が少ない。
そのため、カシメ部14を円18の内側の領域に配置すれば、カシメ部14を通る磁束は少ない。すなわち、カシメ部14を磁束が流れることによる鉄損の増加を抑制することができる。
また、カシメ部14が内周17に近い位置に形成されているほど、カシメ部14を通る磁束が少なくなるため、鉄損の増加を抑制する効果を高めることができる。そのため、カシメ部14と円18との距離D1よりも、カシメ部14と内周17との距離D2が短い方が望ましい。
なお、カシメ部14は、図19では仮想磁極P2の径方向内側に形成されているが、円18の内側であれば他の位置に形成されていてもよい。また、カシメ部14は、図19では丸カシメ部であるが、Vカシメ部(図21)あるいは他の形状のカシメ部であってもよい。
図20は、実施の形態1の電動機100における磁束の流れのシミュレーション結果を示す磁束線図である。図20から、仮想磁極P2を流れる磁束は、ティース52の位置に応じて周方向に曲がろうとするが、スリット13によって磁束の流れが径方向に近付くように整流されていることが分かる。
また、スリット13から外周16までの最短距離L2が、極中心における磁石挿入孔11から外周16までの距離L1よりも短いため、仮想磁極P2において磁束が周方向に流れることが抑制されていることが分かる。
また、永久磁石20から出た磁束が、空隙部15によって周方向に均等に分流され、磁束の偏りが抑制されていることが分かる。また、カシメ部14を通過する磁束が少ないことも分かる。
次に、樹脂部30の作用について説明する。コンシクエントポール型のロータ1では、仮想磁極P2を通った磁束がシャフト25に流れやすい。
すなわち、非コンシクエントポール型のロータ1C(図12)では、径方向内側がN極の永久磁石20と、径方向内側がS極の永久磁石20とが周方向に隣り合うため、ある永久磁石20のN極から出た磁束は、隣接する永久磁石20のS極に流れる。
これに対し、コンシクエントポール型のロータ1では、全ての永久磁石20の径方向内側が同一の磁極、例えばN極である。そのため、永久磁石20の径方向内側のN極から出た磁束は、仮想磁極P2に流れた磁束を除き、ロータコア10の中心に向かって流れやすい。このような磁束は、ロータコア10の中心に固定されたシャフト25に流れ込み、漏れ磁束となる。
そこで、実施の形態1では、ロータコア10とシャフト25との間に、非磁性の樹脂部30を設けている。ロータコア10とシャフト25との間に非磁性の樹脂部30が介在することにより、ロータコア10からシャフト25に磁束が流れ込むことを抑制し、漏れ磁束を低減することができる。
<実施の形態の効果>
以上説明したように、実施の形態1のロータ1は、磁石挿入孔11を有するロータコア10と、磁石挿入孔11に配置された永久磁石20とを有し、永久磁石20によって磁石磁極P1が構成され、ロータコア10の一部によって仮想磁極P2が構成されている。仮想磁極P2の周方向の幅W2は、永久磁石20の周方向の幅W1よりも狭く、仮想磁極P2には少なくとも一つのスリット13が形成されている。
以上説明したように、実施の形態1のロータ1は、磁石挿入孔11を有するロータコア10と、磁石挿入孔11に配置された永久磁石20とを有し、永久磁石20によって磁石磁極P1が構成され、ロータコア10の一部によって仮想磁極P2が構成されている。仮想磁極P2の周方向の幅W2は、永久磁石20の周方向の幅W1よりも狭く、仮想磁極P2には少なくとも一つのスリット13が形成されている。
永久磁石20の幅W1に対して仮想磁極P2の幅W2を狭くすることにより、仮想磁極P2に磁束を集中させ、仮想磁極P2における磁束密度を高くすることができる。また、仮想磁極P2に設けられた一つのスリット13により、仮想磁極P2を流れる磁束の方向を径方向に近付けることができるため、磁石磁極P1と仮想磁極P2とにおける磁束のアンバランスを低減することができる。その結果、振動および騒音を低減することができる。
また、スリット13からロータコア10の外周16までの最短距離L2が、磁石挿入孔11の周方向中心からロータコア10の外周16までの距離L1よりも短いため、仮想磁極P2を流れる磁束の方向を径方向に近付ける効果がさらに高まり、振動および騒音の低減効果を高めることができる。
また、磁石挿入孔11の径方向内側に空隙部15が形成されているため、永久磁石20から出た磁束および永久磁石20に流入する磁束の偏りを抑制し、振動および騒音の低減効果をさらに高めることができる。
また、スリット13の径方向の最大長さL3が、空隙部15の径方向の最大長さL4より短いため、仮想磁極P2を通過する磁路を短くすることができ、鉄損の増加を抑制することができる。
また、カシメ部14が、空隙部15の径方向外側の端部15eを通る円18の内側に形成されているため、磁束がカシメ部14を通過することによる鉄損の増加を抑制することができる。
また、スリット13が径方向に延在しているため、仮想磁極P2を流れる磁束の方向を径方向に近付ける効果を高めることができる。加えて、磁極中心線M2に対して複数のスリット13a,13bが対称に形成されているため、仮想磁極P2を流れる磁束の方向を径方向に近付ける効果をさらに高めることができる。
また、ロータコア10とシャフト25との間に、非磁性の樹脂部30が設けられているため、コンシクエントポール型のロータに特有の、ロータコア10からシャフト25への漏れ磁束を効果的に抑制することができる。
実施の形態2.
次に、実施の形態2について説明する。図21は、実施の形態2のロータ1Aのロータコア10Aおよび永久磁石20を示す断面図である。実施の形態2のロータ1Aは、ロータコア10Aのスリット13、空隙部15Aおよびカシメ部14Aの形状および配置が、実施の形態1のロータ1と異なる。
次に、実施の形態2について説明する。図21は、実施の形態2のロータ1Aのロータコア10Aおよび永久磁石20を示す断面図である。実施の形態2のロータ1Aは、ロータコア10Aのスリット13、空隙部15Aおよびカシメ部14Aの形状および配置が、実施の形態1のロータ1と異なる。
実施の形態2では、各仮想磁極P2に、径方向に長い2つのスリット13が形成されている。2つのスリット13は、互いに同一形状を有し、磁極中心線M2の周方向両側に、磁極中心線M2から等距離に形成されている。なお、各仮想磁極P2のスリット13の数は、2つに限らず、1つでもよく(図22)、あるいは3つ以上でもよい。
また、磁石挿入孔11の径方向内側に形成される空隙部15Aは、径方向に長いスリット状である。空隙部15Aは、磁極中心線M1上に形成されていることが望ましい。
カシメ部14Aは、空隙部15Aの径方向外側の端部を結ぶ円18の内側に形成されている。カシメ部14Aは、Vカシメ部である。Vカシメ部は、電磁鋼板の表面にV字状のカシメ用金具を押し当てて形成される。そのため、カシメ部14Aは、軸方向に直交する面内では、長方形状である。
カシメ部14Aは、仮想磁極P2の磁極中心線M2上に、長手方向が径方向と一致するように形成することが望ましい。カシメ部14Aをこのように配置すれば、カシメ部14Aを通過する磁束が最も少なくなり(図20参照)、鉄損の増加を効果的に抑制できるためである。
ロータコア10Aの外周16および内周17は、いずれも、軸線C1を中心とする円形である。但し、外周16は、実施の形態1のロータコア10の外周16のような花丸形状(図4)であってもよい。内周17は、実施の形態1のロータコア10の内周17のように突出部分17a(図4)を有していてもよい。
図22は、実施の形態2のスリット13、空隙部15Aおよびカシメ部14Aの配置を説明するための模式図である。スリット13からロータコア10Aの外周16までの最短距離L2は、極中心における磁石挿入孔11からロータコア10Aの外周16までの距離L1よりも短い。また、スリット13の径方向の最大長さL3は、空隙部15Aの径方向の最大長さL4より短い。
実施の形態2のロータ1Aは、スリット13、空隙部15Aおよびカシメ部14Aの形状および配置を除き、実施の形態1のロータ1と同様に構成されている。
実施の形態2のロータ1Aにおいても、仮想磁極P2にスリット13が形成されているため、仮想磁極P2を流れる磁束の方向を径方向に近付けることができる。これにより、磁石磁極P1と仮想磁極P2とにおける磁束のアンバランスを低減することができ、振動および騒音を低減することができる。
また、スリット13からロータコア10Aの外周16までの最短距離L2が、極中心における磁石挿入孔11からロータコア10Aの外周16までの距離L1よりも短いため、磁束が仮想磁極P2で周方向に流れにくくなり、振動および騒音の低減効果をさらに高めることができる。
また、磁石挿入孔11の径方向内側に空隙部15Aが形成されているため、永久磁石20から出た磁束が周方向に均等に流れ、磁束のアンバランスが抑制され、振動および騒音の低減効果をさらに高めることができる。
なお、実施の形態1のロータ1に、実施の形態2のロータ1Aの一部を組み合わせてもよい。例えば、実施の形態1のロータ1の円形の空隙部15の代わりに、実施の形態2のロータ1Aのスリット状の空隙部15Aを設けてもよい。また、実施の形態1のロータ1のカシメ部14(丸カシメ部)の代わりに、実施の形態2のロータ1Aのカシメ部14A(Vカシメ部)を設けてもよい。
また、図23に示すように、ロータコア10Aの円18(図21)よりも内側に、軸方向に直交する面内の形状が三角形状のカシメ部14Bを形成してもよい。図23に示したカシメ部14Bの配置は、図21,22に示したカシメ部14Aと同様である。
<空気調和装置>
次に、上述した各実施の形態の電動機を適用した空気調和装置について説明する。図24(A)は、実施の形態1の電動機100を適用した空気調和装置500の構成を示す図である。空気調和装置500は、室外機501と、室内機502と、これらを接続する冷媒配管503とを備える。
次に、上述した各実施の形態の電動機を適用した空気調和装置について説明する。図24(A)は、実施の形態1の電動機100を適用した空気調和装置500の構成を示す図である。空気調和装置500は、室外機501と、室内機502と、これらを接続する冷媒配管503とを備える。
室外機501は、例えばプロペラファンである室外送風機510を備え、室内機502は、例えばクロスフローファンである室内送風機520を備える。室外送風機510は、羽根車505と、これを駆動する電動機100Aとを有する。
室内送風機520は、羽根車521と、これを駆動する電動機100Bとを有する。電動機100A,100Bは、実施の形態1で説明した電動機100で構成される。なお、図24(A)には、冷媒を圧縮する圧縮機504も示されている。
図24(B)は、室外機501の断面図である。電動機100Aは、室外機501のハウジング508内に配置されたフレーム509によって支持されている。電動機100Aのシャフト25には、ハブ506を介して羽根車505が取り付けられている。
室外送風機510では、電動機100Aのロータ1の回転により、羽根車505が回転し、熱交換器(図示せず)に空気を送風する。空気調和装置500の冷房運転時には、圧縮機504で圧縮された冷媒が熱交換器(凝縮器)で凝縮する際に放出された熱を、室外送風機510の送風によって室外に放出する。
室内送風機520(図24(A))では、電動機100Bのロータ1の回転により、羽根車521が回転し、室内に送風する。空気調和装置500の冷房運転時には、冷媒が蒸発器(図示せず)で蒸発する際に熱が奪われた空気を、室内送風機520の送風によって室内に送風する。
上述した実施の形態1で説明した電動機100は振動および騒音が少ないため、送風機510,520の静音性を向上することができる。これにより、空気調和装置500の静音性を向上することができる。
ここでは、室外送風機510の電動機100Aおよび室内送風機520の電動機100Bに、実施の形態1の電動機100を用いたが、電動機100A,100Bの少なくとも一方が実施の形態1の電動機100を用いていればよい。また、実施の形態1の電動機100の代わりに、実施の形態2のロータ1A(図21)を備えた電動機を用いてもよい。
また、実施の形態1および2で説明した電動機100は、空気調和装置の送風機以外の電気機器に搭載することもできる。
以上、本開示の望ましい実施の形態について具体的に説明したが、本開示は上記の実施の形態に限定されるものではなく、本開示の要旨を逸脱しない範囲において、種々の改良または変形を行なうことができる。
1,1A ロータ、 5 ステータ、 10,10A ロータコア、 11 磁石挿入孔、 12 フラックスバリア(穴部)、 13,13a,13b スリット、 14,14A カシメ部、 15,15A 空隙部、 15e 端部、 16 外周、 17 内周、 17a 突出部分、 18 円、 20 永久磁石、 25 シャフト、 30 樹脂部、 31 内筒部、 32 リブ、 33 外筒部、 50 ステータコア、 51 ヨーク、 52 ティース、 52a 先端部、 53 インシュレータ(絶縁部)、 55 コイル、 100,100A,100B 電動機、 101,102 コア領域、 500 空気調和装置、 501 室外機、 502 室内機、 503 冷媒配管、 504 圧縮機、 505 羽根車、 508 ハウジング、 510 室外送風機(送風機)、 520 室内送風機(送風機)、 521 羽根車、 M1,M2 磁極中心線、 P1 磁石磁極、 P2 仮想磁極、 W1,W2 周方向の幅。
Claims (14)
- 軸線を中心とする周方向に延在する外周を有し、磁石挿入孔を有するロータコアと、
前記磁石挿入孔に配置された永久磁石と
を有し、
前記永久磁石によって磁石磁極が構成され、前記ロータコアの一部によって仮想磁極が構成され、
前記仮想磁極の前記周方向の幅は、前記永久磁石の前記周方向の幅よりも狭く、
前記ロータコアは、前記仮想磁極に少なくとも一つのスリットを有する
ロータ。 - 前記磁石挿入孔の前記周方向の中心から前記外周までの距離L1と、前記少なくとも一つのスリットから前記外周までの最短距離L2とが、L1>L2を満足する
請求項1に記載のロータ。 - 前記ロータコアは、前記磁石挿入孔よりも前記軸線の側に、空隙部を有する
請求項1または2に記載のロータ。 - 前記少なくとも一つのスリットの前記軸線を中心とする径方向の最大長さL3と、前記空隙部の前記径方向の最大長さL4とが、L3<L4を満足する
請求項3に記載のロータ。 - 前記ロータコアは、カシメ部を有し、
前記カシメ部は、前記空隙部において前記軸線から最も離れた端部を通り前記軸線を中心とする円の内側に形成されている
請求項3または4に記載のロータ。 - 前記カシメ部から前記円までの距離は、前記カシメ部から前記ロータコアの内周までの距離よりも長い
請求項5に記載のロータ。 - 前記空隙部は、円形状またはスリット状である
請求項3から6までの何れか1項に記載のロータ。 - 前記空隙部は、前記磁石挿入孔の前記周方向の中心と前記軸線とを結ぶ直線上に位置している
請求項3から7までの何れか1項に記載のロータ。 - 前記少なくとも一つのスリットは、前記軸線を中心とする径方向に長い
請求項1から8までの何れか1項に記載のロータ。 - 前記少なくとも一つのスリットは、前記仮想磁極の前記周方向の中心を通る前記径方向の直線に対して対称に配置された複数のスリットを有する
請求項9に記載のロータ。 - 前記軸線を中心とするシャフトと、前記シャフトと前記ロータコアとの間に設けられた非磁性の樹脂部とをさらに有する
請求項1から10までの何れか1項に記載のロータ。 - 請求項1から11までの何れか1項に記載のロータと、
前記ロータを、前記軸線を中心とする径方向の外側から囲むステータと
を備えた電動機。 - 請求項12に記載の電動機と、
前記電動機によって回転する羽根車と
を備えた送風機。 - 室外機と、前記室外機に冷媒配管により接続された室内機とを備え、
前記室外機および前記室内機の少なくとも一方は、請求項13に記載の送風機を有する
空気調和装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202080093011.2A CN115039320A (zh) | 2020-02-12 | 2020-02-12 | 转子、电动机、送风机以及空调装置 |
| PCT/JP2020/005361 WO2021161421A1 (ja) | 2020-02-12 | 2020-02-12 | ロータ、電動機、送風機および空気調和装置 |
| US17/789,299 US20220376569A1 (en) | 2020-02-12 | 2020-02-12 | Rotor, motor, fan, and air conditioner |
| JP2021577763A JP7204018B2 (ja) | 2020-02-12 | 2020-02-12 | ロータ、電動機、送風機および空気調和装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2020/005361 WO2021161421A1 (ja) | 2020-02-12 | 2020-02-12 | ロータ、電動機、送風機および空気調和装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021161421A1 true WO2021161421A1 (ja) | 2021-08-19 |
Family
ID=77291458
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/005361 WO2021161421A1 (ja) | 2020-02-12 | 2020-02-12 | ロータ、電動機、送風機および空気調和装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20220376569A1 (ja) |
| JP (1) | JP7204018B2 (ja) |
| CN (1) | CN115039320A (ja) |
| WO (1) | WO2021161421A1 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019026273A1 (ja) * | 2017-08-04 | 2019-02-07 | 三菱電機株式会社 | 回転子、電動機、送風機、空気調和装置および回転子の製造方法 |
| WO2019123962A1 (ja) * | 2017-12-21 | 2019-06-27 | 日本電産株式会社 | ロータおよびモータ |
| WO2020003341A1 (ja) * | 2018-06-25 | 2020-01-02 | 三菱電機株式会社 | ロータ、電動機、送風機および空気調和装置 |
Family Cites Families (48)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5223759A (en) * | 1987-12-24 | 1993-06-29 | Seiko Epson Corporation | DC brushless motor with solid rotor having permanent magnet |
| US5508576A (en) * | 1990-07-12 | 1996-04-16 | Seiko Epson Corporation | Rotor for brushless electromotor |
| US5679995A (en) * | 1992-08-12 | 1997-10-21 | Seiko Epson Corporation | Permanent magnet rotor of brushless motor |
| JP3282427B2 (ja) * | 1994-04-13 | 2002-05-13 | トヨタ自動車株式会社 | 永久磁石モータ |
| TW538578B (en) * | 2000-09-13 | 2003-06-21 | Sanyo Electric Co | Synchronous motor with built-in type permanent magnet |
| DE10316831A1 (de) * | 2002-04-15 | 2003-11-27 | Denso Corp | Permanentmagnetrotor für eine rotierende elektrische Maschine mit Innenrotor und magnetsparender Rotor für einen Synchronmotor |
| ITBO20050437A1 (it) * | 2005-06-30 | 2007-01-01 | Spal Automotive Srl | Rotore per macchina elettrica |
| JP4815967B2 (ja) * | 2005-09-21 | 2011-11-16 | トヨタ自動車株式会社 | 永久磁石式回転電機 |
| JP4815204B2 (ja) * | 2005-12-01 | 2011-11-16 | アイチエレック株式会社 | 永久磁石回転機及び圧縮機 |
| US7705502B2 (en) * | 2006-04-14 | 2010-04-27 | Emerson Electric Co. | Interior magnet machine with non-perpendicular slots |
| US7791236B2 (en) * | 2007-08-16 | 2010-09-07 | Ford Global Technologies, Llc | Permanent magnet machine |
| JP2009131070A (ja) * | 2007-11-26 | 2009-06-11 | Denso Corp | 磁石式同期機 |
| US8242654B2 (en) * | 2009-05-20 | 2012-08-14 | Asmo Co., Ltd. | Rotor and motor |
| JP5674791B2 (ja) * | 2009-09-18 | 2015-02-25 | ブルサ エレクトロニック アーゲー | 埋め込まれた磁石を有する永久磁石励磁型同期機 |
| CN102035330B (zh) * | 2009-10-07 | 2014-09-24 | 阿斯莫有限公司 | 电动机 |
| US20120001509A1 (en) * | 2010-06-30 | 2012-01-05 | Asmo Co., Ltd. | Motor and rotor |
| CN103081300B (zh) * | 2010-08-27 | 2015-05-20 | 三菱电机株式会社 | 永久磁铁嵌入型电动机的转子、压缩机及制冷空调装置 |
| JP5353917B2 (ja) * | 2011-02-03 | 2013-11-27 | トヨタ自動車株式会社 | 回転電機用回転子 |
| EP2568578A3 (en) * | 2011-09-07 | 2017-12-06 | Samsung Electronics Co., Ltd. | Motor and washing machine having the same |
| CN103095010B (zh) * | 2011-10-28 | 2017-03-01 | 阿斯莫有限公司 | 转子及电动机 |
| JP6110151B2 (ja) * | 2013-02-07 | 2017-04-05 | 本田技研工業株式会社 | 回転電機のロータ |
| US10574125B2 (en) * | 2013-03-08 | 2020-02-25 | Mitsubishi Electric Corporation | Rotor with flux barrier for reducing flux generated by winding inductance |
| DE102013102822A1 (de) * | 2013-03-19 | 2014-09-25 | Ebm-Papst St. Georgen Gmbh & Co. Kg | Elektromotor mit Innenrotor und Außenstator |
| WO2015011747A1 (ja) * | 2013-07-22 | 2015-01-29 | 三菱電機株式会社 | 永久磁石型モータ、及び電動パワーステアリング装置 |
| CN105594099B (zh) * | 2013-09-25 | 2018-06-08 | 三菱电机株式会社 | 永磁铁埋入型电动机、压缩机以及制冷空调装置 |
| JP5991545B2 (ja) * | 2013-11-15 | 2016-09-14 | 株式会社デンソー | 回転電機のロータ及びそのロータを備えた回転電機 |
| JP5872605B2 (ja) * | 2014-03-04 | 2016-03-01 | ダイキン工業株式会社 | ロータ |
| JP6226196B2 (ja) * | 2014-04-15 | 2017-11-08 | 株式会社デンソー | 回転電機のロータ |
| EP3136561B1 (en) * | 2014-04-22 | 2022-06-22 | Mitsubishi Electric Corporation | Embedded permanent magnet-type electric motor, compressor, and refrigeration/air-conditioning device |
| WO2015162713A1 (ja) * | 2014-04-23 | 2015-10-29 | 三菱電機株式会社 | 永久磁石埋込型電動機、圧縮機、冷凍空調装置 |
| US10116176B2 (en) * | 2014-10-07 | 2018-10-30 | Mitsubishi Electric Corporation | Permanent magnet embedded electric motor, compressor and refrigeration air conditioner |
| JP6480789B2 (ja) * | 2015-04-13 | 2019-03-13 | 本田技研工業株式会社 | 回転電機のロータ |
| CN107534335B (zh) * | 2015-06-15 | 2020-02-28 | 三菱电机株式会社 | 转子、永久磁铁埋入型电动机、压缩机以及空气调节机 |
| US10855126B2 (en) * | 2015-11-18 | 2020-12-01 | Mitsubishi Electric Corporation | Electric motor and air conditioner |
| JP6298086B2 (ja) * | 2016-02-24 | 2018-03-20 | ファナック株式会社 | 電動機のロータ及びその製造方法 |
| DE112016006772T5 (de) * | 2016-04-21 | 2019-01-03 | Mitsubishi Electric Corporation | Elektromotor und Klimaanlage |
| US10211690B2 (en) * | 2016-04-28 | 2019-02-19 | Faraday & Future Inc. | IPM machine with specialized rotor for automotive electric vehicles |
| WO2017208317A1 (ja) * | 2016-05-31 | 2017-12-07 | 三菱電機株式会社 | 回転子、電動機、圧縮機、送風機、及び空気調和機 |
| EP3261220B1 (en) * | 2016-06-23 | 2020-08-12 | Volvo Car Corporation | Electric machine |
| US10211692B2 (en) * | 2016-08-11 | 2019-02-19 | Hiwin Mikrosystems Corp. | Permanent magnet motor |
| US10355537B2 (en) * | 2017-03-27 | 2019-07-16 | Ford Global Technologies, Llc | Method for adjusting magnetic permeability of electrical steel |
| WO2019026979A1 (ja) * | 2017-08-01 | 2019-02-07 | 株式会社デンソー | 回転電機、回転電機駆動システム、磁石、磁石の製造方法、着磁装置、及び磁石ユニット |
| CN108023421B (zh) * | 2017-12-21 | 2024-05-28 | 珠海格力电器股份有限公司 | 电机转子和永磁电机 |
| CN111903038B (zh) * | 2018-04-10 | 2023-11-28 | 三菱电机株式会社 | 电动机、压缩机及空气调节装置 |
| JP7053392B2 (ja) * | 2018-07-13 | 2022-04-12 | オークマ株式会社 | 同期電動機の回転子 |
| JP6755921B2 (ja) * | 2018-10-19 | 2020-09-16 | 本田技研工業株式会社 | ロータ |
| JP2020096410A (ja) * | 2018-12-10 | 2020-06-18 | 本田技研工業株式会社 | ロータ |
| DE102018132502A1 (de) * | 2018-12-17 | 2020-06-18 | Valeo Siemens Eautomotive Germany Gmbh | Rotorblech, Rotor und elektrische Maschine sowie Verfahren zur Herstellung eines Rotors |
-
2020
- 2020-02-12 US US17/789,299 patent/US20220376569A1/en active Pending
- 2020-02-12 CN CN202080093011.2A patent/CN115039320A/zh active Pending
- 2020-02-12 JP JP2021577763A patent/JP7204018B2/ja active Active
- 2020-02-12 WO PCT/JP2020/005361 patent/WO2021161421A1/ja active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019026273A1 (ja) * | 2017-08-04 | 2019-02-07 | 三菱電機株式会社 | 回転子、電動機、送風機、空気調和装置および回転子の製造方法 |
| WO2019123962A1 (ja) * | 2017-12-21 | 2019-06-27 | 日本電産株式会社 | ロータおよびモータ |
| WO2020003341A1 (ja) * | 2018-06-25 | 2020-01-02 | 三菱電機株式会社 | ロータ、電動機、送風機および空気調和装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7204018B2 (ja) | 2023-01-13 |
| CN115039320A (zh) | 2022-09-09 |
| JPWO2021161421A1 (ja) | 2021-08-19 |
| US20220376569A1 (en) | 2022-11-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11552515B2 (en) | Rotor, motor, fan, and air conditioner | |
| US11190069B2 (en) | Consequent-pole-type rotor, electric motor, and air conditioner | |
| US11394260B2 (en) | Rotor, motor, fan, and air conditioning apparatus | |
| CN107408850B (zh) | 永久磁铁埋入型电动机、送风机以及制冷空调机 | |
| WO2017203618A1 (ja) | 回転子、電動機、圧縮機、空気調和機、及び電動機の製造方法 | |
| WO2018189881A1 (ja) | ロータ、電動機および空気調和装置 | |
| WO2019215865A1 (ja) | ロータ、電動機、圧縮機および空気調和装置 | |
| JP6615375B2 (ja) | 電動機および空気調和装置 | |
| JP7486629B2 (ja) | 回転子、電動機、送風機、空気調和装置、及び回転子の製造方法 | |
| WO2021161421A1 (ja) | ロータ、電動機、送風機および空気調和装置 | |
| WO2023286117A1 (ja) | モータ、送風機および空気調和装置 | |
| JP7559044B2 (ja) | 電動機、ファン、及び空気調和機 | |
| JPWO2023195076A5 (ja) | ||
| AU2020431092A1 (en) | Fan and air conditioner | |
| WO2023148953A1 (ja) | ロータ、電動機、送風機、空気調和装置および電動機の製造方法 | |
| WO2023073757A1 (ja) | ロータ、電動機、送風機および空気調和装置 | |
| CN115104237A (zh) | 电动机、送风机以及空调装置 | |
| JP7381914B2 (ja) | 回転子、モータ、圧縮機および空気調和装置 | |
| WO2023148949A1 (ja) | 電動機及び空気調和機 | |
| JP7239738B2 (ja) | ロータ、電動機、ファン、及び空気調和機 | |
| WO2022085576A1 (ja) | ロータ及び該ロータを用いたモータ、並びに、電子機器 | |
| JPWO2023073757A5 (ja) | ||
| JPWO2021161421A5 (ja) | ||
| CN115136468A (zh) | 电动机、送风机及空调装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20918548 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2021577763 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 20918548 Country of ref document: EP Kind code of ref document: A1 |