WO2021009906A1 - 細胞画像解析方法および細胞画像解析装置 - Google Patents
細胞画像解析方法および細胞画像解析装置 Download PDFInfo
- Publication number
- WO2021009906A1 WO2021009906A1 PCT/JP2019/028268 JP2019028268W WO2021009906A1 WO 2021009906 A1 WO2021009906 A1 WO 2021009906A1 JP 2019028268 W JP2019028268 W JP 2019028268W WO 2021009906 A1 WO2021009906 A1 WO 2021009906A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- image
- colony
- cell
- region
- cells
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images
















Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
- G06V10/22—Image preprocessing by selection of a specific region containing or referencing a pattern; Locating or processing of specific regions to guide the detection or recognition
- G06V10/235—Image preprocessing by selection of a specific region containing or referencing a pattern; Locating or processing of specific regions to guide the detection or recognition based on user input or interaction
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12M—APPARATUS FOR ENZYMOLOGY OR MICROBIOLOGY; APPARATUS FOR CULTURING MICROORGANISMS FOR PRODUCING BIOMASS, FOR GROWING CELLS OR FOR OBTAINING FERMENTATION OR METABOLIC PRODUCTS, i.e. BIOREACTORS OR FERMENTERS
- C12M1/00—Apparatus for enzymology or microbiology
- C12M1/34—Measuring or testing with condition measuring or sensing means, e.g. colony counters
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12Q—MEASURING OR TESTING PROCESSES INVOLVING ENZYMES, NUCLEIC ACIDS OR MICROORGANISMS; COMPOSITIONS OR TEST PAPERS THEREFOR; PROCESSES OF PREPARING SUCH COMPOSITIONS; CONDITION-RESPONSIVE CONTROL IN MICROBIOLOGICAL OR ENZYMOLOGICAL PROCESSES
- C12Q1/00—Measuring or testing processes involving enzymes, nucleic acids or microorganisms; Compositions therefor; Processes of preparing such compositions
- C12Q1/02—Measuring or testing processes involving enzymes, nucleic acids or microorganisms; Compositions therefor; Processes of preparing such compositions involving viable microorganisms
- C12Q1/04—Determining presence or kind of microorganism; Use of selective media for testing antibiotics or bacteriocides; Compositions containing a chemical indicator therefor
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/46—Descriptors for shape, contour or point-related descriptors, e.g. scale invariant feature transform [SIFT] or bags of words [BoW]; Salient regional features
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/77—Processing image or video features in feature spaces; using data integration or data reduction, e.g. principal component analysis [PCA] or independent component analysis [ICA] or self-organising maps [SOM]; Blind source separation
- G06V10/774—Generating sets of training patterns; Bootstrap methods, e.g. bagging or boosting
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/60—Type of objects
- G06V20/69—Microscopic objects, e.g. biological cells or cellular parts
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/60—Type of objects
- G06V20/69—Microscopic objects, e.g. biological cells or cellular parts
- G06V20/695—Preprocessing, e.g. image segmentation
Definitions
- the present invention relates to a cell image analysis method and a cell image analysis device.
- iPS cells induced pluripotent stem cells
- the cells being cultured are extracted from the culture vessel and transferred to another culture vessel, and subculture is performed to obtain the next generation cell line. This extraction of cells is called picking. Since there are cells unsuitable for passage such as cells that have already started differentiation (cells that have lost pluripotency) in the culture vessel, the cells suitable for passage are the workers (users) at the time of passage. Sorted by.
- the worker (user) searches for cells suitable for passage from the culture vessel by checking the cell colonies in the culture vessel one by one with a microscope. Next, the worker (user) marks a position where the cells suitable for passage are located, and sucks the cell colony at the marked position with a pipetter or the like. In addition, at the initial stage of culturing, cells that have already started differentiation (cells that have lost pluripotency), dead cells, and the like are extracted from the culture vessel and removed. Similar to the passage, such removal work is also performed by searching for the removal target using a microscope and picking the found removal target.
- Non-Patent Document 1 a device that automatically performs a cell picking operation by a pipetta by imaging a microscopic image of cells in a culture vessel, determining a picking target from the image, and then operating a controller. It is disclosed.
- Non-Patent Document 1 Since the cell search work needs to be performed by the user himself, it is desired to reduce the workload of the user for the cell search work.
- the cells to be picked differ depending on the purpose of cell culture performed by the user, the type of cells to be cultured, and the like. Therefore, it is necessary for the user to independently determine which cell region is suitable for the picking target from among the large number of cell regions observed from the microscope image. As a result, conventionally, when culturing pluripotent cells, it has been difficult to reduce the load on the user associated with the work of searching for a picking target.
- the present invention has been made to solve the above-mentioned problems, and one object of the present invention is to effectively reduce the load on the user associated with the work of searching for cells to be picked in cell culture. It is to provide a cell image analysis method and a cell image analysis apparatus which can be performed.
- the cell image analysis method in the first aspect of the present invention includes a step of acquiring a first image of a cell colony containing cells having differentiation potential, and a cell colony in the first image.
- the step of converting the first image into a label image by performing a segmentation process for identifying the colony region of the cell that has already started differentiation and the colony region of the undifferentiated cell, and the shape feature amount of the cell colony from the label image.
- a step of receiving an input regarding a colony area to be searched from a user using a computer a step of setting a judgment standard of a shape feature amount based on the user's input, and a shape feature amount and a judgment standard.
- each cell colony includes a step of determining whether or not a colony region as a candidate to be searched is included.
- the cell image analyzer in the second aspect of the present invention includes a storage unit in which a microscopic image of a cell colony containing cells capable of differentiating is input, and a cell in the microscopic image that has already started differentiation.
- a segmentation processing unit that performs segmentation processing to identify the colony region of the undifferentiated cells and converts the first image into a label image, an input unit that accepts input regarding the colony region to be searched, and a microscope image.
- Each cell colony contained in the cell colony is provided with a determination processing unit for determining whether or not a colony region as a candidate for search is included, and the determination processing unit acquires the shape feature amount of the cell colony from the label image. It is configured to determine the colony region based on the shape feature amount and the determination standard of the shape feature amount set based on the input of the user.
- the cell image analysis method in the third aspect of the present invention includes a step of creating a trained model for machine-learned determination and a step of acquiring a first image of a cell colony containing cells having differentiation potential. , A step of performing a segmentation process for identifying a colony region of cells that have already started differentiation and a colony region of undifferentiated cells in the cell colonies in the first image, and converting the first image into a label image.
- the step of creating a trained model includes a step of determining whether or not a colony region that is a candidate for a search target is included for each cell colony by inputting a label image of one image into the trained model.
- the step of accepting the input of selection information as to whether or not the cell colony in the second image acquired in advance includes a desired colony region, and the label image obtained by segmenting the second image as input data, and the selection information as teacher data. Includes steps to create a trained model by machine learning.
- the colony region of cells that have started differentiation by the segmentation treatment and the colony region of undifferentiated cells are picked according to the purpose of culturing and the like.
- the colony area that can be the target of the above can be identified from the image.
- each cell colony in the image becomes a candidate for search target based on the shape feature amount and the determination criterion of the shape feature amount set based on the user's input. It is possible to obtain a determination result as to whether or not the colony region is included.
- the colony region that is a candidate for the search target is included for each cell colony in the image by the trained model machine-learned using the selection information of whether or not the desired colony region is included. It is possible to obtain the determination result of whether or not.
- the cell image analysis method and the cell image analysis apparatus 100 according to the present embodiment will be described with reference to FIGS. 1 to 14.
- Cell image analysis method In the cell image analysis method shown in FIG. 1, in a cell picking operation in cell culture, a microscopic image of a cell colony 10 is acquired, and the cell colony 10 shown in the microscopic image is a colony region that is a candidate for a search target. It is a method of determining whether or not it is included.
- the cell colony 10 is a cell mass (a collection of a large number of cells) derived from a single cell.
- the colony region is a region of cell colonies composed of specific cells.
- Cell picking is to extract cells or cell clusters to be picked from the cell culture vessel 90.
- the picking of cells is performed by sucking the picking target using an instrument such as a pipetter.
- the cells to be picked in this embodiment are cells having differentiation potential.
- Cells having differentiation potential are, for example, iPS cells, ES cells (embryonic stem cells) and the like. These cells have pluripotency (potency) to differentiate into cells that make up various tissues and organs.
- "undifferentiated cells” which are cells that maintain pluripotency and "undifferentiated deviant cells” that have deviated from the undifferentiated state and have already started to differentiate are generated. Therefore, a colony region of undifferentiated cells and a colony region of undifferentiated deviant cells are formed in the cell colony.
- a cell colony may consist of either a colony region of undifferentiated cells or a colony region of undifferentiated deviant cells, or may include a colony region of undifferentiated cells and a colony region of undifferentiated deviant cells. ..
- undifferentiated cells are picked and transferred to another culture vessel, and cultured as the next generation cell line.
- the work of picking and removing from the culture vessel 90 is performed.
- the cell used for passage is not limited to any undifferentiated cell.
- picking a colony region of undifferentiated cells according to the purpose of the user performing the culturing operation is searched by the user and selected as a target for picking.
- the cell image analysis method distinguishes between the colony region 11 of undifferentiated cells and the colony region 12 of undifferentiated deviant cells when culturing cells having such differentiation potential. Then, the cell image analysis method determines the cell colony 10 including the colony region that is a candidate for the search target for picking according to the purpose of the user who performs the culture work, and thereby the cell colony 10 to be picked. Support the search work of.
- the colony region 12 of undifferentiated deviant cells is an example of the “colony region of cells that have already started differentiation” in the claims.
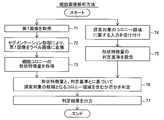
- the cell image analysis method includes at least the following steps 71 to 76.
- Step 71 Obtain a first image 21 in which a cell colony 10 containing cells having differentiation potential is imaged.
- Step 72 In the cell colony 10 in the first image 21, a segmentation process for identifying the colony region 12 of the cells that have already started differentiation (undifferentiated deviation cells) and the colony region 11 of the undifferentiated cells is performed.
- the first image 21 is converted into the label image 21A.
- the shape feature amount 25 of the cell colony 10 is acquired from the label image 21A.
- Step 74 The computer is used to receive input from the user regarding the colony area to be searched.
- Step 75 The determination criterion 30 of the shape feature amount 25 is set based on the input of the user.
- Step 76 Based on the shape feature amount 25 and the determination criterion 30, it is determined whether or not each cell colony 10 includes a colony region that is a candidate for a search target.
- the first image 21 may be a microscopic image of a cell colony 10 containing cells having differentiation potential.
- the microscope image is an image acquired by an optical microscope such as a transmission observation type microscope or a phase contrast microscope.
- the first image 21 can be a holographic microscope image.
- the first image 21 is not particularly limited as long as it is an image in which the shape of the cell colony 10 can be captured nondestructively at an observable magnification.
- the first image 21 is an image obtained by capturing at least one cell colony 10.
- the first image 21 is acquired by imaging the cell colonies 10 in the culture vessel 90 with the imaging device 200, for example, as shown in FIG.
- the culture container 90 is a transparent flat plate-shaped culture dish such as a so-called petri dish, a microplate (well plate) in which a plurality of wells are formed, or the like.
- a segmentation process is performed on the acquired first image 21.
- the "segmentation process” is a process of dividing an image into a plurality of areas, and by assigning a label indicating the detection target to the area in which the detection target appears, the input image is divided into a plurality of label areas. It is a process to classify into.
- the label area is an area (a part of an image) composed of a group of pixels with a common label in the image.
- the segmentation process is realized by image processing using a computer.
- the label is information indicating the meaning indicated by the image portion constituting the label area. Segmentation is performed by assigning a label to each pixel in the image.
- the label may be given in units of a group of a plurality of pixels (pixel group).
- the type of label is called a class.
- the segmentation process for the first image 21 generates a label image 21A in which the first image 21 is divided into a plurality of label areas.
- the segmentation process in step 72 divides the first image 21 into at least the label region of the colony region 12 of the cells that have started differentiation (undifferentiated deviant cells) and the label region of the colony region 11 of the undifferentiated cells. It is a process to do. That is, at least two classes are classified. As a result, the label image 21A generated includes at least two label regions, a colony region 12 of the undifferentiated deviant cells and a colony region 11 of the undifferentiated cells.
- the label image 21A includes, for example, three (three classes) label regions: a colony region 12 of undifferentiated deviant cells, a colony region 11 of undifferentiated cells, and a background region 13 other than the colony region.
- each pixel in the same label area is represented by the same pixel value or the same color. Different label areas are represented by different pixel values or different colors.
- each pixel in the first image 21 is a ternary pixel corresponding to three classes of labels (colony region of undifferentiated cells, colony region of undifferentiated cells, background region). It is a ternary image classified by any of the values. As a result, image information irrelevant to the shape of the cell colony, such as the pattern of the colony region and the gradation of light and darkness appearing in the first image 21, is removed, and only the shape of each label region can be accurately extracted.
- the shape feature amount 25 of the cell colony 10 is acquired from the label image 21A.
- the shape feature amount 25 is information that numerically expresses the shape of the cell colony 10 included in the label image 21A.
- the shape feature amount 25 can be an amount (numerical value) indicating the size, contour shape, width, length, etc. of the label region indicating the cell colony 10.
- the shape feature amount 25 of the cell colony 10 may be a shape feature amount relating to the entire region of the cell colony 10, a colony region 11 of undifferentiated cells which is a part of the cell colony 10, or a colony region of undifferentiated deviation cells. It may be a shape feature amount with respect to 12. The specific contents of the shape feature amount 25 will be described later.
- step 74 the input regarding the colony area to be searched is received via the input device provided in the computer. Then, in step 75, the determination criterion 30 of the shape feature amount 25 is set by the computer based on the input information.
- the information about the colony area to be searched is the information for setting the determination criterion 30 of the shape feature amount 25.
- the information regarding the colony region to be searched may be the determination criterion 30 itself.
- the information about the colony area to be searched may be information indicating the user's tendency as to what kind of colony area the user determines as the search target. More simply, the information about the colony region to be searched for can be information that represents the user's preference for the cell colony 10 as to what colony region the user wants. Therefore, the determination criterion 30 of the shape feature amount 25 according to the user's own determination criterion is set based on the input regarding the colony region to be searched.
- the determination criterion 30 of the shape feature amount 25 set based on the user input may be, for example, the threshold value of the shape feature amount 25.
- the determination criterion 30 may include a weight for each shape feature quantity 25 used for the determination.
- the user inputs and sets the threshold value and the weight of the shape feature amount 25 according to the characteristics of the cell colony 10 to be picked.
- a sample microscope image is prepared in advance, and the user himself / herself selects (teaches) whether or not the individual cell colonies 10 appearing in the microscope image include a colony region as a candidate for search. As a result, the determination criterion 30 may be set.
- step 76 it is determined for each cell colony 10 appearing in the image whether or not each cell colony 10 in the first image 21 (label image 21A) includes a colony region that is a candidate for search.
- the determination process is realized by image processing using a computer.
- the determination process of whether or not the colony region as a candidate for the search target is included depends on whether or not the shape feature amount 25 acquired for the cell colony 10 to be determined matches the determination criterion 30 of the shape feature amount 25. Will be implemented.
- a determination result 35 is generated for each cell colony 10 in the first image 21 (label image 21A) as to whether or not the colony region as a candidate for the search target is included.
- the determination result 35 may be binary information of "including a colony region as a candidate for a search target (positive example)" and "not including a colony region as a candidate for a search target (negative example)".
- the determination result 35 may be information indicating the degree of high possibility of "including the colony region as a candidate for the search target”.
- the determination result 35 is output. Based on the determination result 35, it can be determined by the user himself / herself or automatically whether or not the individual cell colonies 10 in the first image 21 (label image 21A) are to be picked. For example, the user selects the cell colony 10 according to the purpose from the cell colonies 10 determined to be a positive example in consideration of the determination result 35 of the individual cell colonies 10 as the picking target. Further, for example, from the cell colonies 10 determined to be positive examples, any cell colony 10 is selected as a picking target by an automatic process such as a threshold value process. Therefore, the user can determine the picking target without requiring a search operation such as confirming the morphology of each cell colony 10 in the culture vessel 90 in detail in the picking operation.
- the cell image analysis device 100 is a device that executes the cell image analysis method shown in FIGS. 1 and 2.
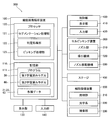
- the cell image analysis device 100 shown in FIG. 3 includes a storage unit 110, a segmentation processing unit 121, a determination processing unit 122, and an input unit 140.
- the cell image analysis device 100 can acquire a microscope image from the cell image pickup device 200 by inputting / outputting a signal, data communication, or transferring data via a recording medium.
- a microscopic image of a cell colony 10 containing cells having differentiation potential is input to the storage unit 110.
- the microscope image is the first image 21 shown in FIG.
- the cell image analysis device 100 is configured to store the image data of the first image 21 acquired from the cell imaging device 200 in the storage unit 110. As a result, step 71 of FIG. 2 is carried out.
- the segmentation processing unit 121 performs a segmentation process for identifying the colony region 12 of cells that have already started differentiation and the colony region 11 of undifferentiated cells in the cell colony 10 in the microscopic image (first image 21). That is, the segmentation processing unit 121 carries out step 72 of FIG.
- the segmentation processing unit 121 converts the first image 21 into a label image 21A (see FIG. 1) by performing the segmentation processing on the first image 21.
- the determination processing unit 122 determines whether or not each cell colony 10 included in the microscope image includes a colony region that is a candidate for a search target.
- the determination processing unit 122 acquires the shape feature amount 25 (see FIG. 1) of the cell colony 10 from the label image 21A, and determines the colony region based on the shape feature amount 25 and the determination criterion 30 of the shape feature amount 25. Is configured to do. That is, the determination processing unit 122 executes steps 73 and 76 of FIG.
- the determination criterion 30 of the shape feature amount 25 is set in the cell image analysis device 100 based on the input of the user using the input unit 140 in steps 74 and 75 prior to the determination process (step 76), and is stored in the storage unit 110. Will be done.
- the determination processing unit 122 outputs the determination result 35 in step 77 of FIG. Based on the determination result 35, it can be determined by the user or automatically whether or not the individual cell colonies 10 in the first image 21 (label image 21A) are to be picked.
- the cell image analysis apparatus 100 stores data with a processor 120 that performs arithmetic processing such as a CPU (Central Processing Unit), a GPU (Graphics Processing Unit), and an FPGA (field-programmable gate array). It is composed of a personal computer (PC) including a storage unit 110 and an input unit 140.
- a processor 120 that performs arithmetic processing such as a CPU (Central Processing Unit), a GPU (Graphics Processing Unit), and an FPGA (field-programmable gate array). It is composed of a personal computer (PC) including a storage unit 110 and an input unit 140.
- PC personal computer
- the processor 120 functions as the segmentation processing unit 121 and the determination processing unit 122 by executing the program 111 stored in the storage unit 110. That is, in the example of FIG. 3, the segmentation processing unit 121 and the determination processing unit 122 are realized as functional blocks of the processor 120. The segmentation processing unit 121 and the determination processing unit 122 may be configured as separate hardware.
- the individual hardware includes that the segmentation processing unit 121 and the determination processing unit 122 are configured by separate processors.
- the individual hardware means that the cell image analysis apparatus 100 includes a plurality of computers (PCs), and a computer (PC) for performing segmentation processing and a computer (PC) for performing determination processing are separately provided. Including.
- the storage unit 110 may be composed of a volatile and / or non-volatile storage device.
- the storage unit 110 includes a hard disk drive or a solid state drive.
- the program 111 of the cell image analyzer 100 is stored in the storage unit 110.
- the storage unit 110 stores various data such as the acquired microscope image (first image 21).
- the input unit 140 is a device that receives operation input from the user.
- the input unit 140 includes an input device such as a mouse or a keyboard.
- the input unit 140 is configured to receive input regarding the colony region to be searched.
- the cell image analysis device 100 is connected to a display unit 130 that displays an image.
- the display unit 130 includes a monitor of a liquid crystal system or an organic / inorganic EL system.
- the input unit 140 may be a touch panel integrated with the display unit 130.
- the cell image analysis device 100 is configured to be able to set the determination criterion 30 by receiving the user's operation input via the input unit 140.
- the cell image analysis apparatus 100 can display a microscope image (first image 21), a label image 21A, a determination result 35, and the like on the display unit 130.
- the cell image analysis device 100 receives, for example, an input of a selection operation for the label image 21A displayed on the display unit 130.
- the cell image analysis device 100 allows the user to identify the picking target (cell colony 10 including the colony region that is a candidate for the search target).
- the determination criterion 30 can be automatically set from the input information by accepting the operation input from the user.
- the step 74 of accepting the input regarding the colony region to be searched is a step of accepting the input of the selection information 40 of whether or not the cell colony 10 in the second image 22 acquired in advance includes the desired colony region from the user. Including. Then, in step 75 of setting the determination criterion 30, the determination criterion 30 is set based on the received selection information 40.
- the second image 22 is a microscope image acquired in advance as a sample for setting the determination criterion 30.
- the second image 22 is an image of a cell colony 10 containing cells having differentiation potential, similar to the first image 21 (see FIG. 1).
- the selection information 40 is information selected by the user as to whether the cell colony 10 in the second image 22 is a positive example (including a desired colony region) or a negative example (not including a desired colony region). Is. That is, the selection information 40 is one-to-one associated with one cell colony 10 in the second image 22, and is information indicating whether the associated cell colony 10 is a positive example or a negative example.
- the selection information 40 is binary information indicating either a positive example (for example, “1”) or a negative example (for example, “0”).
- the selection information 40 is acquired, for example, by accepting a user's selection via the input unit 140 with respect to the image displayed on the display unit 130.
- the step of accepting the input of the selection information 40 enables the user to specify the colony area in the label image 22A of the second image 22 or the second image 22, or the user can specify the colony area. Includes enabling picking.
- the selection information 40 can be input by the user actually designating the colony area or by the user actually picking the colony area.
- FIG. 6 shows an example of operation input for the label image 22A of the second image 22.
- the label image 22A and the schematic diagram for explanation are shown side by side.
- the user performs an operation input 41 for selecting a cell colony 10 as a positive example via the input unit 140 (see FIG. 3).
- the user actually picks the cell colony 10 as an example in the state where the label image 22A of the second image 22 or the second image 22 is displayed.
- the cell colony 10 is removed from the image, so that the selection information 40 that the removed cell colony 10 is a positive example can be obtained.
- the cell colony 10 for which no input has been made is given selection information 40 as a negative example.
- an operation input of being a negative example may be performed.
- Selection information 40 is generated for an appropriate number of cell colonies 10 based on the user's operation input. From the generated plurality of selection information 40, it is possible to grasp the user's tendency (that is, preference information) as to what kind of cell colony 10 is determined as a positive example. As a result, the determination criterion 30 is set based on the received selection information 40.
- the determination criterion 30 can be acquired by machine learning using the selection information 40. That is, in step 75 for setting the determination criterion 30, as shown in FIG. 4, machine learning using the shape feature amount 25 acquired from the label image 22A of the second image 22 as input data and the selection information 40 as teacher data. This includes creating a first trained model 50 that has acquired the determination criterion 30 for the shape feature amount 25. Then, in step 76 (see FIG. 2) of determining whether or not the colony region as a candidate for the search target is included, the first trained model 50 uses the shape feature amount 25 acquired from the label image 21A of the first image 21. Is included in the generation of the determination result 35.
- the label image 22A of the second image 22 is acquired by a segmentation process on the second image 22, similarly to the label image 21A of the first image 21 shown in FIG.
- the label image 22A of the second image 22 is divided into a plurality of regions in the same manner as the label image 21A of the first image 21. That is, the label image 22A (see FIG. 6) of the second image 22 includes at least the colony region 12 of the undifferentiated deviant cells and the colony region 11 of the undifferentiated cells.
- the shape feature amount 25 is calculated for each cell colony 10.
- the shape feature amount 25 of the cell colony 10 and the selection information 40 about the cell colony 10 are acquired.
- the shape feature amount 25 of the cell colony 10 of interest is given by machine learning using the shape feature amount 25 as input data and the selection information 40 as teacher data
- the cell colony 10 is a positive example (a candidate to be searched). It is learned to determine whether or not the colony region is included. That is, the first trained model 50 that has acquired the determination criterion 30 of the shape feature amount 25 is generated by machine learning.
- the first trained model 50 (learning model for determination processing) is, for example, an SVM (support vector machine).
- the first trained model 50 is a non-linear SVM.
- the first trained model 50 takes the shape feature amount 25 of the unknown cell colony 10 reflected in the label image 21A of the first image 21 as an input, and determines whether or not the cell colony 10 corresponds to a positive example 35. To generate.
- the degree of certainty that the cell colony 10 of interest is highly likely to correspond to a positive example is in the range of 0 (%) to 100 (%). It is configured to generate with.
- FIG. 5 shows the creation process of the first trained model 50.
- the first trained model 50 can be created by, for example, the cell image analyzer 100 shown in FIG.
- step 81 the second image 22 is acquired from the cell imaging device 200 and input to the storage unit 110.
- step 82 the segmentation processing unit 121 performs the segmentation processing on the second image 22.
- the label image 22A of the second image 22 is generated by the segmentation process.
- step 83 the input of the selection information 40 for the cell colony 10 in the label image 22A is accepted by the input unit 140.
- This step 83 is an example of the “step of accepting input of selection information from the user” in the cell image analysis method of the present embodiment.
- step 84 the determination processing unit 122 calculates the shape feature amount 25 of the cell colony 10 into which the selection information 40 is input.
- step 85 the determination processing unit 122 performs machine learning using the shape feature amount 25 as input data and the selection information 40 as teacher data.
- Step 85 is an example of the “step of setting the criterion” in the cell image analysis method of the present embodiment.
- step 86 it is determined whether or not the predetermined number of learnings has been completed. If the learning is not completed a predetermined number of times, the process returns to step 81, and the determination processing unit 122 learns the next cell colony 10. When a predetermined number of learnings are completed, machine learning is completed. In step 87, the created first trained model 50 is stored in the storage unit 110.
- the process of creating the first trained model 50 that has acquired the determination criterion 30 of the shape feature amount 25 is performed.
- the determination processing unit 122 calculates the shape feature amount 25 from the label image 21A of the first image 21, and the first trained model. Enter in 50.
- the determination processing unit 122 generates the determination result 35 by the first trained model 50.
- Machine learning and determination processing using such a shape feature amount 25 requires a smaller amount of input data than, for example, when the entire image is used as input data, so that the processing load is small and high-speed processing is possible. .. Therefore, the machine learning of the first trained model 50 in which the user is involved can be completed in a short time, and the process until the determination result 35 is output during the picking operation can be performed quickly.
- Shape feature amount Next, the shape feature amount 25 will be described.
- the shape feature amount 25 is applied to i) the entire region of the cell colony 10 contained in the label image 21A, ii) the colony region 11 of the undifferentiated cells contained in the cell colony 10, and iii) the cell colony 10. It contains a shape feature amount for at least one of the colony regions 12 of the included cells that have initiated differentiation (undifferentiated deviant cells).
- the shape feature amount 25A of the entire region of the cell colony 10 is referred to as “colony feature amount”
- the shape feature amount 25B of the colony region 11 of the undifferentiated cell is referred to as “undifferentiated region feature amount”.
- the shape feature amount 25C of the colony region 12 of the undifferentiated deviating cells is referred to as “deviation region feature amount”.
- the first image 21 (second image 22) is divided into three classes of labels, a colony region 11 of undifferentiated cells, a colony region 12 of undifferentiated deviant cells, and a background region 13. Will be done. Therefore, as shown in FIG. 8, the entire region of the cell colony 10 is the sum of the colony region 11 of the undifferentiated cells and the colony region 12 of the undifferentiated deviant cells.
- FIG. 8 shows a cell colony 10 including a colony region 11 and a colony region 12, a cell colony 10 containing only the colony region 11 of undifferentiated cells and a cell colony containing only the colony region 12 of undifferentiated deviant cells. There are also ten.
- the shape feature amount 25 specifically includes i) the area of the region, ii) the contour length of the region, iii) the circularity of the region, and iv) the aspect ratio of the minimum circumscribing rectangle of the region. And v) include at least one of the area ratios of the colony area 11 to the total area of the cell colony 10.
- the "region" referred to here is any one of the entire region of the cell colony 10, the colony region 11 or the colony region 12.
- the "area of the area” corresponds to the number of pixels included in the area of interest.
- the "regional contour length” corresponds to the number of pixels constituting the contour 91 of the region of interest.
- the "aspect ratio of the minimum circumscribing rectangle of the region” is represented by (short side / long side) of the minimum circumscribing rectangle 92 of the region of interest.
- the minimum circumscribing rectangle 92 is a rectangle having the smallest area among the rectangles surrounding the region of interest.
- the "area ratio of the colony region 11 to the entire region of the cell colony 10" is the ratio occupied by the colony region 11 of the undifferentiated cells in the cell colony 10. The area ratio is expressed as (the area of the colony region 11 of undifferentiated cells / the area of the entire cell colony 10).
- FIG. 7 shows an example of the shape feature amount 25 that can be adopted when picking the colony region 11 of undifferentiated cells at the time of passage.
- the shape feature amount 25A (colony feature amount) for the entire region of the cell colony 10 includes the area of the entire region of the cell colony 10, the contour length of the entire region of the cell colony 10, the circularity of the entire region of the cell colony 10, and the cells. The aspect ratio of the entire area of the colony 10 can be adopted.
- the shape feature amount 25B (undifferentiated area feature amount) relating to the colony area 11 of the undifferentiated cell includes the area of the colony area 11 of the undifferentiated cell, the contour length of the colony area 11 of the undifferentiated cell, and the colony area of the undifferentiated cell. A circularity of 11 and an aspect ratio of the colony region 11 of undifferentiated cells can be adopted.
- the shape feature amount 25C (deviation area feature amount) relating to the colony region 12 of the undifferentiated deviant cells
- the area of the colony region 12 of the undifferentiated deviant cells and the area ratio of the colony region 11 to the entire region of the cell colony 10 can be adopted.
- the area ratio indicates that the larger the value, the smaller the colony region 12 of the undifferentiated deviant cells, and when picking the colony region 11 of the undifferentiated cells, it is used as a measure of the small proportion of the undifferentiated deviant cells. Become.
- the shape feature amount 25 used in the determination process includes one or more of the above feature amounts. Since the feature points of the cell colonies 10 that are actually used as a material for determining whether or not the user is to be picked are not single, it is preferable to use a plurality of shape feature amounts 25 for the determination process. For example, in the determination process, at least the shape feature 25A for the entire region of the cell colony 10, the shape feature 25B for the colony region 11 of the undifferentiated cell, and the shape feature 25C for the colony region 12 of the undifferentiated deviant cell are used. Use one by one. As the number of shape feature amounts 25 increases, it becomes more difficult to set an appropriate determination criterion 30. By using the first trained model 50 by machine learning shown in FIG. 4, it is not necessary to directly obtain an appropriate threshold value for each shape feature amount 25 even when a plurality of shape feature amounts 25 are used, and it is comprehensive. It is preferable because the criterion 30 can be obtained.
- the segmentation process shown in step 72 of FIG. 2 can be performed by the second trained model 60 (see FIG. 9) in which the segmentation process is machine-learned. That is, in step 72 of converting the first image 21 into the label image 21A, as shown in FIG. 9, the second trained model 60 that uses the first image 21 as input data and labels the colony region 11 with the segmentation result. Includes generating the label image 21A.
- the second trained model 60 performs segmentation processing on the input images (first image 21, second image 22), and divides the input image into a plurality of label areas (label image 21A, label image 22A). Is output.
- the machine learning method any method such as a full-layer convolutional neural network (FCN), a neural network, a support vector machine (SVM), and boosting can be used.
- FCN full-layer convolutional neural network
- SVM support vector machine
- boosting boosting
- the second trained model 60 of the present embodiment from the viewpoint of the identification performance of the label region, it is preferable to use a convolutional neural network frequently used for semantic segmentation, and more preferably a full-layer convolutional neural network.
- Such a second trained model 60 is configured to include an input layer, a convolution layer, and an output layer into which an image is input.
- FIG. 10 shows an input image 23, a teacher label image 24 as teacher data, and a label image 23A as a result of performing segmentation processing on the input image 23 by the second trained model 60 after machine learning.
- the teacher label image 24 and the label image 23A are labeled in three classes: a colony region 11 of undifferentiated cells, a colony region 12 of undifferentiated deviant cells, and a background region 13.
- Each image is actually a color image, and the label image is an image color-coded into three colors.
- a schematic diagram showing the cell colonies 10 is shown side by side in each image for the sake of explanation.
- the learning data 61 used for machine learning includes an input image 23 and a teacher label image 24 for the same cell colony 10.
- the input image 23 is an original image before the segmentation process is performed, and is an image in which the cell colony 10 similar to the first image 21 and the second image 22 is captured.
- the teacher label image 24 is created as a correct image to be generated as a result of the segmentation process on the input image 23. That is, the teacher label image 24 is a label image obtained by dividing the input image 23 into a plurality of label areas.
- the teacher label image 24 is created by the creator of the learning image for executing machine learning. For example, for the cell colony 10, a cell membrane-stained image in which the cell region was stained with a staining agent and a nuclear-stained image in which the nuclear-stained region of undifferentiated cells was stained with an undifferentiated marker were acquired, and the cell membrane-stained image and the nuclear-stained image were obtained.
- the teacher label image 24 is created by obtaining the difference between the two images after binarizing each of the two images by the threshold processing.
- the conversion process (segmentation process) from the input image 23 to the correct teacher label image 24 is learned for the segmentation process.
- the label image 21A and the label image 22A subjected to the segmentation processing are generated. Will be done.
- the first trained model 50 for the determination processing and the second trained model 60 for the segmentation processing as described above are stored in the storage unit 110 as, for example, a part of the program 111 executed by the processor 120 of FIG. Will be done. Then, when the processor 120 functions as the determination processing unit 122, the determination processing is performed using the first trained model 50. When the processor 120 functions as the segmentation processing unit 121, the segmentation processing is performed using the second trained model 60.
- Cell picking system 500 including the cell image analysis device 100, the cell imaging device 200, and the cell picking device 300 of the present embodiment will be described with reference to FIG.
- the cell picking system 500 images the cell colony 10 (see FIG. 1) in the culture vessel 90 with the cell imaging device 200, performs segmentation processing and determination processing on the obtained first image 21, and obtains a determination result 35. Based on this, it is configured to be able to perform picking work automatically or semi-automatically.
- the cell picking system 500 includes a control unit 400 for controlling the picking operation.
- FIG. 12 shows a configuration example of the cell picking system 500 in which the cell imaging device 200, the cell picking device 300, and the control unit 400 are combined.
- the cell imaging device 200 images the cell colonies 10 in the culture vessel 90 and acquires microscopic images (first image 21, second image 22).
- the cell imaging device 200 is configured to output a microscope image to the control unit 400.
- the cell imaging device 200 includes an illumination unit 210, an optical system 220, and an imaging unit 230.
- the illumination unit 210 irradiates the optical system 220 with illumination light via the culture container 90 placed on the stage 450.
- the illumination unit 210 includes a light source such as an LED that generates illumination light in the visible wavelength region.
- the optical system 220 includes a lens group such as an objective lens, and sends the incident light transmitted through the culture vessel 90 to the imaging unit 230 to form an image having a desired magnification.
- the image pickup unit 230 includes an image sensor and converts the light received via the optical system 220 into an electric signal to generate a microscope image. Examples of the image sensor include a CCD (Charge-Coupled Device) image sensor, a CMOS (Complementary MOS) image sensor, and the like.
- CCD Charge-Coupled Device
- CMOS Complementary MOS
- FIG. 12 shows a configuration example in which the imaging unit 230 is attached to an inverted optical microscope (phase contrast microscope) to form a cell imaging device 200.
- the user can see the cell colony 10 with the naked eye instead of the image through the eyepiece 250 of the optical microscope.
- the control unit 400 is a computer including a processor and a storage unit (not shown), and the processor functions as a control unit by executing a program stored in the storage unit.
- the control unit 400 is communicably connected to the cell image analysis device 100, the cell imaging device 200, and the cell picking device 300.
- the control unit 400 is a tablet terminal, and includes a display unit 410 and a touch panel type input unit 420.
- the input unit 420 can be used by the user to input the selection information 40.
- the control unit 400 acquires the imaged microscope images (first image 21, second image 22) from the cell imaging device 200 and displays them on the display unit 410.
- the control unit 400 receives a user's input operation via the input unit 420 on the displayed image.
- the control unit 400 transmits the acquired microscope images (first image 21, second image 22) to the cell image analysis device 100, and receives the selection information 40 received from the user via the input unit 420 to the cell image analysis device 100. Send to.
- the control unit 400 controls the picking operation of the cell picking device 300 by transmitting coordinate information to the cell picking device 300.
- the cell image analysis device 100 may function as the control unit 400 without providing the control unit 400.
- the cell picking device 300 is configured to pick cells in the culture vessel 90 placed on the stage 450.
- the cell picking device 300 includes a nozzle portion 310, a suction mechanism 320, and a nozzle moving mechanism 330.
- the nozzle unit 310 is configured to access the inside of the culture vessel 90 and suck cells.
- the nozzle portion 310 is configured so that, for example, a disposable pipette tip 340 can be attached and detached.
- the nozzle portion 310 sucks cells from the tip of the attached pipette tip 340.
- the suction mechanism 320 is fluidly connected to the nozzle portion 310 and is configured to apply a suction force to the nozzle portion 310.
- the nozzle moving mechanism 330 is configured to move the nozzle portion 310.
- the nozzle moving mechanism 330 is a robot mechanism having a drive source such as a motor.
- the tip of the nozzle portion 310 is moved to the picking coordinates in the culture container 90, and after suction, the tip of the nozzle portion 310 is moved to the outside of the culture container 90. Evacuate to.
- the cell picking device 300 is controlled by the control unit 400 to start and end the picking operation, and receives input of picking coordinates from the control unit 400.
- the stage 450 is, for example, an electric stage.
- the control unit 400 can control the stage 450 so as to sequentially acquire microscopic images of a predetermined range in the culture vessel 90.
- the stage 450 does not have to be an electric stage.
- the user in the picking operation, can, for example, grasp and move the culture vessel 90 on the stage 450 to sequentially acquire a plurality of microscope images at each imaging position in the culture vessel 90.
- the processor 120 of the cell image analysis apparatus 100 includes a segmentation processing unit 121, a determination processing unit 122, and a picking processing unit 123 as functional blocks.
- the segmentation processing unit 121 performs segmentation processing on the microscope images (first image 21, second image 22) using the second trained model 60 stored in the storage unit 110.
- the determination processing unit 122 is configured to acquire the second image 22 and the selection information 40 via the control unit 400, create the first trained model 50, and store it in the storage unit 110.
- the determination processing unit 122 performs determination processing on the cell colony 10 in the first image 21 by using the first learned model 50 stored in the storage unit 110.
- the picking processing unit 123 is configured to determine whether or not the cell colony 10 corresponds to the picking target, and set the picking coordinates 26 (see FIG. 8) for the cell colony 10 corresponding to the picking target. ..
- the storage unit 110 stores the second trained model 60 in advance. Since the segmentation process does not depend on the user's preference (the tendency of which cell colony 10 is judged as the picking target), the second trained model 60 created by executing machine learning in advance should be stored. Is possible. Image data including the first image 21, the second image 22, selection information 40, and the like are input to and stored in the storage unit 110.
- the process of creating the first trained model 50 shown in FIG. 5 is executed as a preparatory work before the first image 21 is acquired and the determination process and the picking process are executed. That is, the first trained model 50 is created in advance by the second image 22 as a sample, and is stored in the storage unit 110.
- the user prepares a culture container 90 containing a sample cultured cell and places it on the stage 450.
- the second image 22 is imaged by the cell imaging device 200 and transmitted to the cell image analysis device 100 via the control unit 400 (step 81 in FIG. 5).
- the segmentation processing unit 121 executes the segmentation processing by the second trained model 60 to generate the label image 22A of the second image 22 (step 82 in FIG. 5). As shown in FIG. 6, the control unit 400 displays the second image 22 or the generated label image 22A on the display unit 410, and accepts the input of the selection information 40 from the user via the input unit 420 (FIG. 5). Step 83). The image display and input reception can also be performed by using the display unit 130 and the input unit 140 (see FIG. 11) included in the cell image analysis apparatus 100.
- the control unit 400 transmits the selection information 40 to the cell imaging device 200.
- the determination processing unit 122 calculates the shape feature amount 25 of the cell colony 10 from the label image 22A (step 84 in FIG. 5).
- the determination processing unit 122 calculates one or a plurality of preset shape feature amounts 25 from the various shape feature amounts shown in FIG. 7.
- the determination processing unit 122 performs machine learning using the shape feature amount 25 of the cell colony 10 and the selection information 40 for the cell colony 10 (step 85 in FIG. 5).
- the user repeats the above operations to execute machine learning a predetermined number of times required to create the first trained model 50 (step 86 in FIG. 5).
- the creation of the first trained model 50 as a preparatory work is completed.
- the created first trained model 50 is stored in the storage unit 110 (step 87 in FIG. 5).
- the picking work may actually be performed in the process of creating the first trained model 50. That is, when the user taps the cell colony 10 in the displayed image, the control unit 400 acquires the tapped position as the picking coordinates 26 (see FIG. 6). The control unit 400 transmits the acquired picking coordinates 26 and a picking operation start command to the cell picking device 300. As a result, the cell picking device 300 picks the colony area 11 at the designated picking coordinates.
- the user can perform the preparation process (machine learning) of the first trained model 50, which is the preparatory work, only by actually executing the picking work such as the passage by manual input.
- the user causes the cell picking system 500 to manually input the picking work for the first culture container 90. Since a large number of cell colonies 10 to be determined are contained in the culture container 90, for example, when the picking operation for the first culture container 90 is completed, the process of creating the first trained model 50 by machine learning is performed. Is also completed. Then, the second and subsequent picking operations for the culture vessel 90 can be automatically or semi-automatically executed using the created first trained model 50, as will be described later.
- step 151 in FIG. 13 corresponds to step 71 of the cell image analysis method of the present embodiment shown in FIG.
- Step 152 in FIG. 13 corresponds to step 72 shown in FIG.
- Step 153 in FIG. 13 corresponds to step 73 shown in FIG.
- Step 154 of FIG. 13 corresponds to step 76 shown in FIG.
- a cell removal method using a cell image analysis method is shown. That is, the cell removal method of the present embodiment includes steps 71 to 76 of FIG. 2, and obtains a determination result 35 as to whether or not a colony region as a candidate for a search target is included.
- the cell removal method includes step 156 of setting the picking coordinates 26 of the colony region 11 determined to be desired by the user based on the determination result 35 of whether or not the colony region is included as a candidate for the search target, and picking. It further comprises a step 157 of picking the cells at coordinate 26 from the culture vessel 90.
- step 151 the cell imaging device 200 images the cell colonies 10 in the culture vessel 90 on the stage 450, and generates a first image 21 showing the cell colonies 10 included in the imaging field of view.
- the segmentation processing unit 121 of the cell image analysis apparatus 100 acquires the first image 21 via the control unit 400.
- step 152 the segmentation processing unit 121 executes the segmentation processing on the acquired first image 21. That is, the segmentation processing unit 121 generates the label image 21A of the first image 21 by inputting the first image 21 into the second trained model 60.
- step 153 the determination processing unit 122 acquires the shape feature amount 25 of the cell colony 10 from the generated label image 21A. That is, the determination processing unit 122 calculates one or a plurality of preset shape feature amounts 25 from the examples shown in FIG. 7.
- the determination processing unit 122 determines whether or not each cell colony 10 includes a colony region that is a candidate for search. That is, the determination processing unit 122 inputs the shape feature amount 25 for each cell colony 10 into the first trained model 50, so that each cell colony 10 is a positive example (including a colony region as a candidate for search target). The determination result 35 of whether or not is output. The determination result 35 is output as a certainty (numerical value) from 0 (%) to 100 (%).
- step 155 the picking processing unit 123 of the cell image analysis device 100 determines whether or not the cell colony 10 for which the determination result 35 is output corresponds to the picking target. When it is determined that the cell colony 10 for which the determination result 35 is output does not correspond to the picking target, the picking processing unit 123 proceeds to the process in step 158.
- the picking processing unit 123 determines that the cell colony 10 for which the determination result 35 is output corresponds to the picking target, the picking coordinate 26 of the colony region 11 determined to be desired by the user is set in step 156.
- the position coordinates in the colony region 11 of the undifferentiated cells among the cell colonies 10 determined to correspond to the picking target are set to the picking coordinates 26.
- the picking processing unit 123 calculates the geometric center of gravity in the colony region 11 of the undifferentiated cells and sets the calculated center of gravity position at the picking coordinates 26, as illustrated in FIG. Further, the picking processing unit 123 acquires the contour shape of the region actually picked by the cell picking device 300 in advance, and sets the picking coordinates 26 as a position where the picked region fits within the colony region 11 of the undifferentiated cells. To do.
- the picking processing unit 123 outputs the set picking coordinates 26 to the control unit 400.
- step 157 the cell picking device 300 picks the cells at the picking coordinate 26 from the culture vessel 90 under the control of the control unit 400.
- the cell picking device 300 extracts the cells (colony region) of the picking coordinate 26 into the pipette tip by moving and sucking the tip of the nozzle unit 310 of the picking coordinate 26 transmitted from the control unit 400.
- the cell picking device 300 retracts the tip of the nozzle unit 310 to the outside of the culture container 90, and then discharges the extracted cells into the cell container at a predetermined position.
- the process proceeds to step 158.
- step 158 the control unit 400 determines whether or not to end the picking work.
- the process returns to step 151 to acquire the next first image 21.
- the control unit 400 may perform the control unit 400. , Judge that the picking work is finished.
- FIG. 13 shows an example in which a determination process is performed each time the first image 21 is acquired at each imaging position in the culture vessel 90 (hereinafter, referred to as sequential process).
- a plurality of first images 21 at each imaging position in the culture vessel 90 are imaged in advance, and for each cell colony 10 reflected in each of the imaged first images 21.
- the determination processing may be performed collectively (hereinafter referred to as batch processing).
- batch processing after the determination result 35 for each cell colony 10 imaged in advance is obtained, it is determined whether or not each cell colony 10 is to be picked based on each determination result 35. To.
- FIG. 14 shows an example of the criteria for determining whether or not the cell colony 10 corresponds to the picking target in step 155.
- the picking processing unit 123 determines that the picking target corresponds to, for example, when the value (confidence) of the determination result 35 is larger than the preset threshold value.
- the threshold is pre-populated by the user. The user sets a relatively high threshold value when he / she wants to carefully select the cell colonies 10 to be picked, and sets a relatively low threshold value when he / she wants to pick as many cell colonies 10 as possible.
- the first criterion can be applied to both sequential processing and batch processing.
- the picking processing unit 123 sets the picking target when the rank of the value (confidence) of the determination result 35 of the plurality of cell colonies 10 is higher than the threshold of the preset rank.
- the second criterion can be applied in the case of batch processing. That is, after performing the determination processing for the plurality of (all) cell colonies 10 appearing in the plurality of first images 21 by the batch processing first, each cell colony 10 is ranked according to the determination result 35, and the determination result 35.
- the top N cell colonies 10 having a high value of are set as picking targets.
- the rank threshold N is input in advance by the user.
- the picking process can be performed fully automatically by setting the threshold value in advance.
- the picking processing unit 123 determines that the picking target corresponds to the picking target when the input operation indicating that the picking target is to be received is received. For example, the value (certainty) of the determination result 35 is displayed on the display unit 410 together with the image of the cell colony 10, and the user is made to input whether or not to select the displayed cell colony 10 as the picking target via the input unit 420. .. The user can determine whether or not to set the cell colony 10 as the picking target after confirming the cell colony 10 by himself / herself with reference to the numerical value of the determination result 35.
- step 76 for determining whether or not each cell colony 10 includes a colony region as a candidate to be searched based on the shape feature
- the cell image analysis device 100 of the present embodiment has a storage unit 110 into which a microscope image (first image 21) of an image of a cell colony 10 containing cells having differentiation ability is input and a microscope image as described above.
- a segmentation process for identifying the colony region 12 of the cells that have already started differentiation and the colony region 11 of the undifferentiated cells is performed, and the microscope image (first image 21) is converted into the label image 21A.
- the determination processing unit 122 acquires the shape feature amount 25 of the cell colony 10 from the label image 21A, and determines the shape feature amount 25 and the shape feature amount 25 set based on the input of the user. It is configured to determine the colony region based on the criterion 30.
- the colony region that can be the target of picking is specified from the image according to the culture purpose and the like. It can. Then, based on the shape feature amount 25 and the determination criterion 30 of the shape feature amount 25 set based on the user's input, does each cell colony 10 in the image include a colony region as a candidate for search target? A determination result of 35 can be obtained.
- the cell colony 10 including the colony region that is likely to be determined by the user as a picking target can be determined and shown to the user. Therefore, a large number of cell regions in the microscope image can be displayed. It is not necessary for the user to observe and judge one by one. As a result, the load on the user associated with the search work for cells to be picked in the cell culture can be effectively reduced.
- the cell colony 10 in the second image 22 acquired in advance receives the input of the selection information 40 as to whether or not the desired colony region is included from the user, and the step 83.
- a step 85 of setting a determination criterion 30 based on the selection information 40 is included.
- the user inputs the user's own determination result for the cell colony 10 in the second image 22 as a sample, thereby determining whether or not the "colony region as a candidate for search target" is included. Criteria 30 can be set.
- step 85 of setting the determination criterion 30 the shape feature amount 25 acquired from the label image 21A of the second image 22 is used as input data, and the selection information 40 is used as teacher data.
- step 76 of determining whether or not the colony region as a candidate for the search target is included the shape feature amount 25 acquired from the label image 21A of the first image 21 is input to the first trained model 50 and determined. Includes producing result 35.
- the first trained model 50 that has acquired the determination criterion 30 for the shape feature amount 25 can be obtained by machine learning simply by inputting the selection information 40 by the user.
- the determination result 35 generated by the first trained model 50 can be provided to the user.
- the colony region shown in the first image 21 has various forms, and the user's preference (selection tendency of the picking target) is also various. Therefore, in practice, it is difficult to construct the determination criterion 30 that generates the determination result 35 according to the user's preference by a rule-based method that does not rely on machine learning. On the other hand, if the machine learning method is used, even the construction of the determination criterion 30 in which a plurality of shape feature quantities 25 are combined can be easily performed as compared with the rule-based method. By learning using the selection information 40 which is the result of the user's own judgment, it is possible to easily provide the judgment result 35 with high accuracy according to the user's preference.
- the step 83 of accepting the input of the selection information 40 enables the user to specify the colony region in the label image 21A of the second image 22 or the second image 22. , Or to allow the user to pick the colony area.
- the user can simply specify the colony area for determining the picking target for the cell picking device 300, and input the selection information 40 as a sample for setting the determination criterion 30. Therefore, since it is not necessary to perform a special input operation for inputting the selection information 40, the workload of the user for setting the determination criterion 30 can be reduced.
- the shape feature amount 25 is i) the entire region of the cell colony 10 contained in the label image 21A, ii) the colony region 11 of the undifferentiated cells contained in the cell colony 10, iii. ) Includes a shape feature 25 for at least one of the colony regions 12 of undifferentiated deviating cells contained in the cell colony 10.
- the shape feature amount 25 is i) the area of the region, ii) the contour length of the region, iii) the circularity of the region, and the aspect ratio of the minimum circumscribing rectangle of the iv) region.
- v) include at least one of the area ratios of the colony area 11 to the total area of the cell colony 10.
- the microscopic image (input image 23) obtained by imaging the cell colony 10 is used as input data, and the colony region (11, 12) includes generating a label image 21A by a second trained model 60 that labels the segmentation results.
- the second trained model 60 that has learned the morphology of various cell colonies 10.
- the colony region 11 shown in the microscope image has various morphologies, and the colony region 11 (undifferentiated region, deviant region) having various morphologies can be obtained by a rule-based method that does not rely on machine learning.
- the colony region 11 determined to be desired by the user is determined based on the determination result 35 of whether or not the colony region as a candidate for the search target obtained in steps 71 to 76 is included.
- the step 156 for setting the picking coordinates 26 of the above and the step 157 for picking the cells at the picking coordinates 26 from the culture vessel 90 are further provided.
- the shape feature amount 25 of the cell colony 10 is acquired from the segmentation-processed label image 21A and the determination process is performed based on the shape feature amount 25, but the modifications shown in FIGS. 15 and 16 are shown.
- the determination process is performed without using the shape feature amount 25 of the cell colony 10 is shown. Since the cell image analysis method based on the modified example can be carried out with the same hardware configuration as that of the above embodiment, the description of the hardware will be omitted.
- the cell image analysis method includes step 161 of creating a trained model 55 for machine-learned determination and step 162 of acquiring a first image 21 of an image of a cell colony 10 containing cells having differentiation potential. Then, in the cell colony 10 in the first image 21, a segmentation process was performed to identify the colony region 12 of the cells that had already started differentiation and the colony region 11 of the undifferentiated cells, and the first image 21 was labeled as the label image 21A. By inputting the label image 21A of the first image 21 into the trained model 55 in step 163 of conversion to, and step 164 of determining whether or not each cell colony 10 includes a colony region as a candidate to be searched. And.
- Step 161 for creating the learned model 55 for determination is a step 167 for accepting input of selection information 40 as to whether or not the cell colony 10 in the second image 22 acquired in advance includes a desired colony region.
- step 165 the second image 22 is acquired.
- step 166 the input of the selection information 40 is accepted.
- step 167 a segmentation process for the second image 22 is performed. Steps 165 to 167 are the same as steps 81 to 83 of FIG.
- the shape feature amount 25 is not calculated.
- the label image 22A of the second image 22 is used as the input data instead of the shape feature amount 25.
- the selection information 40 is used as teacher data. Therefore, in step 168, when the label image 21A of the cell colony 10 of interest is given by machine learning using the label image 21A as input data and the selection information 40 as teacher data, the cell colony 10 is used. Learn to determine (guess) whether or not it is a positive example (including a colony region that is a candidate for search).
- any method such as convolutional neural network, neural network, SVM, boosting, etc. can be used. From the viewpoint of the identification performance of the label region, it is preferable to use a convolutional neural network for the trained model 55 for determination based on the modified example.
- the label image 22A obtained by the segmentation process is used as the input image as in this modification, the input image becomes an image divided by label areas of 3 classes (at least 2 classes), for example, the texture (pattern) of the cell surface. ) And information such as variations in brightness in the image due to illumination light and extraneous light are removed. That is, it can be said that the label image 22A is an image in which only the information on the shape of the cell colony 10 is selectively extracted.
- the first image 21 is acquired in step 162, and in step 163, the first image 21 is subjected to the segmentation process on the first image 21.
- Label image 21A is generated. Steps 162 and 163 are similar to steps 71 and 72 shown in FIG.
- step 164 by inputting the label image 21A of the generated first image 21 into the trained model 55 for determination, whether or not each cell colony 10 includes a colony region as a candidate to be searched.
- the determination result 35 is generated.
- step 169 the generated determination result 35 is output.
- the colony region 12 of the cell that has started differentiation by the segmentation treatment and the colony region 11 of the undifferentiated cell the colony region that can be the target of picking according to the culture purpose or the like is selected from the image. Can be identified. Then, whether or not each cell colony 10 in the image includes a colony region as a candidate to be searched by the trained model 55 machine-learned using the selection information 40 of whether or not the desired colony region is included. The determination result 35 of the above can be obtained.
- the cell colony 10 including the colony region that is likely to be determined by the user as a picking target can be determined and shown to the user. Therefore, a large number of cell regions in the microscope image can be displayed. It is not necessary for the user to observe and judge one by one. As a result, the load on the user associated with the search work for cells to be picked in the cell culture can be effectively reduced.
- the present invention is limited to this. Absent.
- the cell colony 10 including the colony region 12 of the undifferentiated deviant cell may be determined as the picking target. That is, the determination process may be performed assuming that the colony region 12 of the undifferentiated deviant cell is a colony region that is a candidate for the search target.
- the criterion 30 is set separately according to the purpose of picking.
- the first trained model 50 (learned model 55 for determination) is created separately because the selection information 40 input as teacher data is different from the case of the colony region 11 of undifferentiated cells.
- the storage unit 110 shown in FIG. 3 separately stores the first trained model 50 for substituting and the first trained model 50 for removing undifferentiated deviant cells, depending on the purpose of the user. You may switch the trained model to be used.
- a segmentation process for classifying two classes of live cells and dead cells may be further performed.
- a segmentation process for classifying the cells adhering to the well and the cells exfoliating into two classes may be further performed.
- the cell colonies 10 including the colony regions that are candidates for the search target can be determined, or "adhered” and From the cell colonies 10 including the colony region of "undifferentiated cells", the cell colony 10 including the colony region as a candidate to be searched can be determined.
- a class of "foreign matter” other than cells may be added so that the foreign matter mixed in the culture vessel 90 can be found and removed.
- the present invention is not limited to this.
- a part or all of the processing executed by the cell image analyzer 100 may be executed via the network.
- the cell image analysis device 100 at a remote location is configured as a server device connected to the cell imaging device 200 via a network 600.
- the user uses the cell imaging device 200 to image the first image 21 and the second image 22, and inputs the selection information 40.
- the cell imaging device 200 transmits the first image 21, the second image 22, and the selection information 40 to the cell image analysis device 100 via the network 600.
- the cell image analyzer 100 performs a segmentation process to generate label images 21A and 22A.
- the cell image analysis apparatus 100 creates the first trained model 50 by using the generated label image 22A and the received selection information 40.
- the cell image analysis device 100 inputs the label image 21A of the first image 21 into the first trained model 50, executes the determination process, and transmits the determination result 35 to the cell imaging device 200.
- the user can acquire the determination result 35 for each cell colony 10 included in the first image 21 and execute the picking operation using the determination result 35.
- the present invention is not limited to this.
- a part of the processing executed by the cell image analysis apparatus 100 may be executed by another apparatus.
- the data processing device 610 which is a server device at a remote location, is communicably connected to the determination processing device 620 via the network 600.
- the data processing device 610 receives a microscope image (first image 21 or second image 22) from the determination processing device 620, which is a PC used by the user, and performs segmentation processing.
- the data processing device 610 performs segmentation processing using, for example, the second trained model 60, and transmits the generated label images (21A, 22A) to the determination processing device 620.
- the determination processing device 620 creates the first trained model 50 by machine learning using the label image 22A of the second image 22 received from the data processing device 610 and the selection information 40 received from the user.
- the determination processing device 620 calculates the shape feature amount 25 of the cell colony 10 from the label image 21A of the first image 21 received from the data processing device 610, and performs the determination process using the first trained model 50.
- the determination processing device 620 acquires the determination result 35 by inputting the shape feature amount 25 into the first trained model 50.
- the user can acquire the determination result 35 for each cell colony 10 included in the first image 21 and execute the picking operation using the determination result 35.
- the cell image analysis method of the present invention may be implemented in the form of a so-called cloud service or the like by the cooperation of a plurality of computers connected to the network.
- the present invention is limited to this. Absent. In the present invention, an amount other than the above may be used as the shape feature amount 25.
- the determination process may be executed by using the rule-based method based on the determination criteria 30 such as the threshold value and the weight set according to the user's preference without using the machine learning method.
- the segmentation process may be executed by using a rule-based method without using the machine learning method by using, for example, threshold processing or feature extraction processing for an image.
- the cell imaging device 200 is configured by providing an imaging unit 230 in an optical microscope is shown, but the present invention is not limited to this.
- the cell imaging device 200 may be a device dedicated to capturing microscopic images of cells, and may not have a function as an optical microscope.
- the stage 450 is used as an electric stage is shown, but the cell imaging device 200 is a movable imaging with respect to the fixed stage 450.
- the unit 230 may be provided.
- the step of accepting the input regarding the colony region to be searched includes the step of accepting the input of selection information from the user as to whether or not the cell colony in the second image acquired in advance includes the desired colony region.
- the cell image analysis method wherein in the step of setting the determination criteria, the determination criteria are set based on the received selection information.
- the determination criterion for the shape feature amount is set by machine learning using the shape feature amount acquired from the label image of the second image as input data and the selection information as teacher data. Including creating the acquired first trained model In the step of determining whether or not the colony region that is a candidate for the search target is included, the shape feature amount acquired from the label image of the first image is input to the first trained model, and the determination result is obtained.
- the cell image analysis method which comprises producing.
- the step of accepting the input of the selection information enables the user to specify the colony area in the second image or the label image of the second image, or allows the user to pick the colony area.
- the cell image analysis method according to item 2 which comprises. (Item 5)
- the shape feature amounts were i) the entire region of the cell colony contained in the label image, ii) the colony region of the undifferentiated cell contained in the cell colony, and iii) the differentiation contained in the cell colony started.
- the cell image analysis method according to item 1 which comprises the shape feature amount for at least one of the cell colony regions.
- the shape feature amounts are i) the area of the region, ii) the contour length of the region, iii) the circularity of the region, iv) the aspect ratio of the minimum circumscribing rectangle of the region, and v) the colony region with respect to the entire region of the cell colony.
- the label image is generated by a second trained model in which a microscope image obtained by imaging the cell colony is used as input data and a label of a segmentation result is given to the colony region.
- the cell image analysis method according to item 1 which comprises the above.
- a cell removal method using the cell image analysis method according to item 1. A step of setting the picking coordinates of the colony region determined to be desired by the user based on the determination result of whether or not the colony region is included as a candidate for the search target, and A cell removal method further comprising a step of picking cells at the picking coordinates from a culture vessel.
- An input unit that accepts input related to the colony area to be searched, Each of the cell colonies included in the microscopic image is provided with a determination processing unit for determining whether or not the colony region as a candidate for the search target is included.
- the determination processing unit acquires the shape feature amount of the cell colony from the label image, and based on the shape feature amount and the determination criterion of the shape feature amount set based on the input of the user, the said A cell image analyzer configured to determine a colony region.
- Step 10 Steps to create a trained model for machine-learned decisions, A step of acquiring a first image of a cell colony containing cells having differentiation potential, and A step of performing a segmentation process for identifying a colony region of cells that have already started differentiation and a colony region of undifferentiated cells in the cell colony in the first image, and converting the first image into a label image.
- each cell colony includes a step of determining whether or not the colony region as a candidate for the search target is included.
- the step of creating the trained model is A step of accepting input of selection information as to whether or not the cell colony in the second image acquired in advance includes the desired colony region, and A cell image analysis method including a step of creating the trained model by machine learning using the label image obtained by segmenting the second image as input data and the selection information as teacher data.
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Organic Chemistry (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Zoology (AREA)
- Wood Science & Technology (AREA)
- Biotechnology (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Molecular Biology (AREA)
- Biomedical Technology (AREA)
- General Engineering & Computer Science (AREA)
- Biochemistry (AREA)
- Microbiology (AREA)
- Genetics & Genomics (AREA)
- Analytical Chemistry (AREA)
- Proteomics, Peptides & Aminoacids (AREA)
- Medical Informatics (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Computing Systems (AREA)
- Software Systems (AREA)
- Databases & Information Systems (AREA)
- Biophysics (AREA)
- Immunology (AREA)
- Toxicology (AREA)
- Medicinal Chemistry (AREA)
- Sustainable Development (AREA)
- Apparatus Associated With Microorganisms And Enzymes (AREA)
- Measuring Or Testing Involving Enzymes Or Micro-Organisms (AREA)
- Image Analysis (AREA)
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201980098569.7A CN114127307B (zh) | 2019-07-18 | 2019-07-18 | 细胞图像解析方法和细胞图像解析装置 |
| PCT/JP2019/028268 WO2021009906A1 (ja) | 2019-07-18 | 2019-07-18 | 細胞画像解析方法および細胞画像解析装置 |
| JP2021532644A JP7342950B2 (ja) | 2019-07-18 | 2019-07-18 | 細胞画像解析方法および細胞画像解析装置 |
| US17/578,179 US12394170B2 (en) | 2019-07-18 | 2022-01-18 | Cell image analysis method and cell image analyzer |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2019/028268 WO2021009906A1 (ja) | 2019-07-18 | 2019-07-18 | 細胞画像解析方法および細胞画像解析装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US17/578,179 Continuation US12394170B2 (en) | 2019-07-18 | 2022-01-18 | Cell image analysis method and cell image analyzer |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021009906A1 true WO2021009906A1 (ja) | 2021-01-21 |
Family
ID=74210370
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/028268 Ceased WO2021009906A1 (ja) | 2019-07-18 | 2019-07-18 | 細胞画像解析方法および細胞画像解析装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US12394170B2 (https=) |
| JP (1) | JP7342950B2 (https=) |
| CN (1) | CN114127307B (https=) |
| WO (1) | WO2021009906A1 (https=) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023008428A1 (ja) * | 2021-07-29 | 2023-02-02 | 株式会社島津製作所 | 細胞画像解析方法 |
| EP4397746A4 (en) * | 2021-08-30 | 2025-08-06 | Shimadzu Corp | CELLULAR IMAGE ANALYSIS SYSTEM, CELLULAR IMAGE ANALYSIS DEVICE, AND CELLULAR IMAGE ANALYSIS METHOD |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113470037A (zh) | 2020-03-31 | 2021-10-01 | 阿里巴巴集团控股有限公司 | 数据处理方法、装置及系统 |
| CN113469180A (zh) * | 2020-03-31 | 2021-10-01 | 阿里巴巴集团控股有限公司 | 医学图像的处理方法和系统、数据处理方法 |
| CN115700821B (zh) * | 2022-11-24 | 2023-06-06 | 广东美赛尔细胞生物科技有限公司 | 一种基于图像处理的细胞识别方法及系统 |
| EP4629183A4 (en) * | 2022-12-30 | 2026-01-21 | Bgi Shenzhen | METHOD AND SYSTEM FOR RECORDING CELL IMAGES, ELECTRONIC DEVICE AND STORAGE MEDIA |
| JP2024101940A (ja) * | 2023-01-18 | 2024-07-30 | キヤノン株式会社 | 細胞画像解析方法、プログラム、推論モデルの製造方法および細胞画像解析装置 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013201909A (ja) * | 2012-03-27 | 2013-10-07 | National Institute Of Advanced Industrial Science & Technology | 細胞画像判定装置、方法、並びにプログラム |
| WO2014192184A1 (ja) * | 2013-05-31 | 2014-12-04 | 富士ゼロックス株式会社 | 画像処理装置、画像処理方法、プログラム、及び記憶媒体 |
| WO2015025506A1 (ja) * | 2013-08-22 | 2015-02-26 | 富士フイルム株式会社 | 幹細胞分化判定装置および方法並びにプログラム |
| WO2015141275A1 (ja) * | 2014-03-17 | 2015-09-24 | 富士フイルム株式会社 | 細胞領域表示制御装置および方法並びにプログラム |
| JP2016154482A (ja) * | 2015-02-24 | 2016-09-01 | シンフォニアテクノロジー株式会社 | 除去領域設定方法、除去領域設定装置およびプログラム |
| WO2017056600A1 (ja) * | 2015-09-28 | 2017-04-06 | 株式会社Screenホールディングス | 画像処理方法および制御プログラム |
| WO2018105432A1 (ja) * | 2016-12-06 | 2018-06-14 | 富士フイルム株式会社 | 細胞画像評価装置および細胞画像評価制御プログラム |
| WO2019044424A1 (ja) * | 2017-08-29 | 2019-03-07 | 富士フイルム株式会社 | 撮影制御装置、方法およびプログラム |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5181385B2 (ja) | 2007-08-16 | 2013-04-10 | 国立大学法人名古屋大学 | 細胞の品質を予測する予測モデルの構築法、予測モデルの構築用ブログラム、該プログラムを記録した記録媒体、予測モデルの構築用装置 |
| JP4968595B2 (ja) | 2008-07-23 | 2012-07-04 | 株式会社ニコン | 細胞の状態判別手法及び細胞観察の画像処理装置 |
| JP5740101B2 (ja) * | 2010-04-23 | 2015-06-24 | 国立大学法人名古屋大学 | 細胞評価装置、インキュベータ、細胞評価方法、細胞評価プログラムおよび細胞の培養方法 |
| US9619881B2 (en) * | 2013-09-26 | 2017-04-11 | Cellogy, Inc. | Method and system for characterizing cell populations |
| JP6595156B2 (ja) * | 2014-03-04 | 2019-10-23 | 富士フイルム株式会社 | 細胞画像取得装置および方法並びにプログラム |
| EP3721373B1 (en) * | 2017-12-07 | 2025-03-05 | Ventana Medical Systems, Inc. | Deep-learning systems and methods for joint cell and region classification in biological images |
| CN111837157B (zh) * | 2018-03-08 | 2024-08-23 | 株式会社岛津制作所 | 细胞图像解析方法、细胞图像解析装置、及学习模型创建方法 |
| EP3766000A2 (en) * | 2018-03-16 | 2021-01-20 | The United States of America as represented by the Secretary of the Department of Health and Human Services | Using machine learning and/or neural networks to validate stem cells and their derivatives for use in cell therapy, drug discovery, and diagnostics |
| JP6996633B2 (ja) * | 2018-08-06 | 2022-01-17 | 株式会社島津製作所 | 教師ラベル画像修正方法、学習済みモデルの作成方法および画像解析装置 |
| JP7049974B2 (ja) * | 2018-10-29 | 2022-04-07 | 富士フイルム株式会社 | 情報処理装置、情報処理方法、及びプログラム |
-
2019
- 2019-07-18 CN CN201980098569.7A patent/CN114127307B/zh active Active
- 2019-07-18 WO PCT/JP2019/028268 patent/WO2021009906A1/ja not_active Ceased
- 2019-07-18 JP JP2021532644A patent/JP7342950B2/ja active Active
-
2022
- 2022-01-18 US US17/578,179 patent/US12394170B2/en active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013201909A (ja) * | 2012-03-27 | 2013-10-07 | National Institute Of Advanced Industrial Science & Technology | 細胞画像判定装置、方法、並びにプログラム |
| WO2014192184A1 (ja) * | 2013-05-31 | 2014-12-04 | 富士ゼロックス株式会社 | 画像処理装置、画像処理方法、プログラム、及び記憶媒体 |
| WO2015025506A1 (ja) * | 2013-08-22 | 2015-02-26 | 富士フイルム株式会社 | 幹細胞分化判定装置および方法並びにプログラム |
| WO2015141275A1 (ja) * | 2014-03-17 | 2015-09-24 | 富士フイルム株式会社 | 細胞領域表示制御装置および方法並びにプログラム |
| JP2016154482A (ja) * | 2015-02-24 | 2016-09-01 | シンフォニアテクノロジー株式会社 | 除去領域設定方法、除去領域設定装置およびプログラム |
| WO2017056600A1 (ja) * | 2015-09-28 | 2017-04-06 | 株式会社Screenホールディングス | 画像処理方法および制御プログラム |
| WO2018105432A1 (ja) * | 2016-12-06 | 2018-06-14 | 富士フイルム株式会社 | 細胞画像評価装置および細胞画像評価制御プログラム |
| WO2019044424A1 (ja) * | 2017-08-29 | 2019-03-07 | 富士フイルム株式会社 | 撮影制御装置、方法およびプログラム |
Non-Patent Citations (1)
| Title |
|---|
| TAKAHASHI, WATARU : "Development of segmentation technology for recognition of undifferentiated region of iPS cells using deep learning", MEDICAL SCIENCE DIGEST- MEDIKARU SAIENSU DAIJESUTO, vol. 44, no. 9, 1 January 2018 (2018-01-01), JP, pages 483 - 486, XP009526237, ISSN: 1347-4340 * |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023008428A1 (ja) * | 2021-07-29 | 2023-02-02 | 株式会社島津製作所 | 細胞画像解析方法 |
| JPWO2023008428A1 (https=) * | 2021-07-29 | 2023-02-02 | ||
| JP7736065B2 (ja) | 2021-07-29 | 2025-09-09 | 株式会社島津製作所 | 細胞画像解析方法 |
| EP4397746A4 (en) * | 2021-08-30 | 2025-08-06 | Shimadzu Corp | CELLULAR IMAGE ANALYSIS SYSTEM, CELLULAR IMAGE ANALYSIS DEVICE, AND CELLULAR IMAGE ANALYSIS METHOD |
Also Published As
| Publication number | Publication date |
|---|---|
| CN114127307A (zh) | 2022-03-01 |
| US12394170B2 (en) | 2025-08-19 |
| JPWO2021009906A1 (https=) | 2021-01-21 |
| CN114127307B (zh) | 2025-04-04 |
| JP7342950B2 (ja) | 2023-09-12 |
| US20220148282A1 (en) | 2022-05-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7342950B2 (ja) | 細胞画像解析方法および細胞画像解析装置 | |
| JP6981533B2 (ja) | 細胞画像解析装置、細胞画像解析システム、学習データの生成方法、学習モデルの生成方法、学習データの生成プログラム、および、学習データの製造方法 | |
| EP4130843A9 (en) | Microscope system, projection unit, and sperm sorting assistance method | |
| Yang et al. | A CNN-based active learning framework to identify mycobacteria in digitized Ziehl-Neelsen stained human tissues | |
| JP5707399B2 (ja) | 微生物検出方法、微生物検出装置及びプログラム | |
| US9189677B2 (en) | Recording medium having observation program recorded therein and observation apparatus | |
| JP5244801B2 (ja) | 細胞及び/又は細胞コロニーの自動化した除去のための方法及び装置 | |
| WO2010146802A1 (ja) | 細胞塊の状態判別手法、この手法を用いた画像処理プログラム及び画像処理装置、並びに細胞塊の製造方法 | |
| WO2003067904A2 (en) | High-throughput cell identification and isolation method and apparatus | |
| WO2017150194A1 (ja) | 画像処理装置、画像処理方法及びプログラム | |
| WO2011004568A1 (ja) | 受精卵観察の画像処理方法、画像処理プログラム及び画像処理装置、並びに受精卵の製造方法 | |
| JP6130801B2 (ja) | 細胞領域表示制御装置および方法並びにプログラム | |
| US20240169523A1 (en) | Cell counting method, machine learning model construction method and recording medium | |
| JP2011004638A (ja) | 受精卵観察の画像処理方法、画像処理プログラム及び画像処理装置 | |
| JP2017140006A (ja) | 培養状態解析システム及び培養状態解析方法、並びに、プログラム | |
| JP2022174740A (ja) | 学習支援システムおよび学習支援方法 | |
| JP2012039929A (ja) | 受精卵観察の画像処理方法、画像処理プログラム及び画像処理装置、並びに受精卵の製造方法 | |
| Liao et al. | A clinical consensus-compliant deep learning approach to quantitatively evaluate human in vitro fertilization early embryonic development with optical microscope images | |
| Niederlein et al. | Image analysis in high content screening | |
| JP7532754B2 (ja) | 画像解析装置、細胞培養観察装置、画像解析方法、及びプログラム | |
| JP2023117361A (ja) | 細胞画像解析方法およびプログラム | |
| EP4125065B1 (en) | Image processing method and classification model construction method | |
| JP6567244B2 (ja) | 細胞の運動観察方法、画像処理プログラム及び画像処理装置 | |
| CN121453734A (zh) | 免疫荧光阴道分泌物自动检测仪的仪器 | |
| CN120808339A (zh) | 一种基于光电镊的精子自动化筛选系统与方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19937503 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2021532644 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 19937503 Country of ref document: EP Kind code of ref document: A1 |
|
| WWG | Wipo information: grant in national office |
Ref document number: 201980098569.7 Country of ref document: CN |