WO2020230752A1 - 磁石ユニット及び位置検出装置 - Google Patents
磁石ユニット及び位置検出装置 Download PDFInfo
- Publication number
- WO2020230752A1 WO2020230752A1 PCT/JP2020/018796 JP2020018796W WO2020230752A1 WO 2020230752 A1 WO2020230752 A1 WO 2020230752A1 JP 2020018796 W JP2020018796 W JP 2020018796W WO 2020230752 A1 WO2020230752 A1 WO 2020230752A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- magnet
- holding member
- unit
- columnar
- concave portion
- Prior art date
Links
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/003—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring position, not involving coordinate determination
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/142—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices
- G01D5/145—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices influenced by the relative movement between the Hall device and magnetic fields
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
Definitions
- the present invention relates to a magnet unit and a position detection device.
- a position detection device is used to detect the position of the object to be detected that moves linearly or rotationally.
- the rotational movement position detection device disclosed in Patent Document 1 has a magnet unit including a magnet and a magnet holding member to which the magnet is attached and rotates, and a magnet of the magnet unit facing the magnet to rotate the magnet. It is configured with a housing having magnetic detecting means for detecting the accompanying change in the magnetic field. The magnet unit is rotated by inserting a magnet into a resin magnet holding member, connecting the magnet to the object to be detected, and rotating the magnet unit.
- the magnet unit In the position detecting device for detecting the change in the magnetic field due to the movement of the magnet disclosed in Patent Document 1, when detecting the linear movement of the detected object, the magnet unit is moved along the linear movement direction of the detected object. It needs to be attached, and the magnet needs to be lengthened as the amount of linear movement increases.
- stress is applied to the resin part due to the difference in linear expansion due to the temperature change between the magnet and the resin part, causing damage such as cracks and reducing heat impact resistance. May lead to.
- the present invention has been made in view of the above problems, and provides a magnet unit and a position detecting device capable of accurately detecting a position without a risk of damage due to a temperature change and having excellent thermal shock resistance. With the goal.
- the magnet unit according to the first aspect of the present invention is A magnet that moves linearly or rotationally with respect to a magnetic detection means that detects changes in the magnetic field, A magnet unit including a magnet holding member fixed to a body to be detected, linearly moving or rotating, and to which the magnet is attached.
- the magnet holding member is A fixed portion fixed to the detected body and A magnet accommodating portion to which the magnet is attached is provided.
- the magnet accommodating portion is formed with an opening in which both end faces in the longitudinal direction of the magnet are exposed. It is characterized by that.
- the position detecting device is A magnet that moves linearly or rotationally with respect to a magnetic detection means that detects changes in the magnetic field,
- a magnet unit including a magnet holding member fixed to a body to be detected and linearly or rotationally moved and to which the magnet is attached.
- FIG. 1 It is a schematic perspective view which concerns on one Embodiment of the position detection apparatus of this invention.
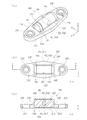
- (a) is a schematic perspective view, (b) is a plan view, and (c) is a sectional view taken along the line AA in (b).
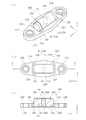
- (a) is a schematic perspective view, (b) is a plan view, and (c) is a sectional view taken along the line AA in (b).
- (a) is a schematic perspective view, (b) is a plan view, and (c) is a sectional view taken along the line AA in (b).
- (a) is a schematic perspective view, (b) is a plan view, and (c) is a sectional view taken along the line AA in (b).
- (a) is a schematic perspective view, (b) is a plan view, and (c) is a sectional view taken along the line AA in (b). It is a schematic perspective view of the magnetic detection part which concerns on one Embodiment of this invention.
- the magnet unit and the position detection device according to the embodiment of the present invention will be described with reference to the accompanying drawings.
- the front-rear direction is the X direction
- the left-right direction is the Y direction
- the up-down direction is the Z direction, based on the state of the position detection device 1 shown in FIG.
- the direction in which the arrows indicating the X direction, the Y direction, and the Z direction are directed will be described as a + (plus) direction
- the opposite direction will be described as a ⁇ (minus) direction.
- the position detection device 1 includes a magnet unit 30 having a magnet 10 and a magnet holding member 20, a magnetic detection unit 40 having a magnetic detection means 41, a case 50, and the like. Is configured with.
- the position detection device 1 is used, for example, to detect a select position (a position that linearly moves in the ⁇ X direction) of an operation lever of an automatic transmission of an automobile.
- the magnet unit 30 is fixed to the operation lever which is the detected body L, the amount of movement of the detected body L is large, and even when a long magnet 10 is used, the magnet unit 30 is not damaged due to a temperature change or the like. It was made like this.
- the position detection device 1 is capable of accurately detecting the position (position in the X direction) by detecting the change in the magnetic field accompanying the relative movement of the magnet unit 30. Further, both the magnet unit 30 and the position detecting device 1 have excellent thermal shock resistance.
- the magnet unit 30 includes a magnet 10 and a magnet holding member 20.
- the magnet 10 is composed of, for example, a samarium-cobalt magnet (SmCo: Samarium-Cobalt), and is formed into a desired shape such as a substantially cylindrical shape by compression molding and sintering a powder raw material.
- the magnet 10 is magnetized so that two magnetic poles are aligned in a direction (longitudinal direction, X direction) along a central axis of a cylindrical shape, for example.
- the magnet 10 is linearly moved with respect to the magnetic detection means 41 that detects a change in the magnetic field.
- the magnet 10 is attached to the magnet holding member 20 to form a magnet unit 30.
- the magnet 10 is linearly moved along the central axis direction (X direction) of the cylindrical shape.
- the magnetization of the magnet 10 is performed, for example, after the unmagnetized magnet 10 is attached to the resin magnet holding member 20 described later by insert molding. By doing so, the magnet unit 30 magnetized as the magnet 10 in a state of being fixed at a predetermined position of the magnet holding member 20 can be obtained.
- the change in the magnetic field accompanying the linear movement of the magnet 10 is detected by the magnetic detection unit 40 including the magnetic detection means 41 housed in the case 50 described later and facing the magnet 10.
- the magnet holding member 20 includes a fixing portion 21 fixed to the detected body L and a magnet accommodating portion 22 in which the magnet 10 is accommodated and attached.
- the magnet holding member 20 is formed of, for example, a thermoplastic resin such as polybutylene terephthalate.
- the fixing portion 21 of the magnet holding member 20 has a substantially rhombus shape in which the X direction is long and the Y direction is short in a plan view, both ends in the X direction are arcuate, and a bottom surface portion is formed. (Bottom surface portion in the ⁇ Z direction) 21a is formed in a flat plate shape.
- a metal collar 23 for reinforcement is insert-molded and embedded in both ends of the fixing portion 21 in the X direction.
- the magnet holding member 20 includes a magnet accommodating portion 22 on a flat bottom surface portion 21a at the center of the fixing portion 21.
- a cylindrical magnet 10 is attached to the magnet holding member 20 so that the central axis is along the moving direction (X direction) of the detected body L.
- the magnet holding member 20 is formed so that the plate thickness of the fixing portion 21 is thinner than the diameter of the magnet 10, and the magnet 10 accommodated in the magnet accommodating portion 22 protrudes upward (Z direction) from the fixing portion 21.
- the outer portion 10a of the magnet 10 is covered with a resin to be attached.
- the magnet accommodating portion 22 of the magnet holding member 20 is made of resin, whereas the magnet 10 is made of metal, so that the magnet 10 is magnetized.
- the housing portion 22 is completely covered with the resin, a thermal expansion difference occurs with respect to a temperature change, and in particular, the influence of the thermal expansion difference with respect to the longitudinal direction of the magnet 10 and the thermal shock resistance become problems.
- an opening 24 is formed in the magnet accommodating portion 22 of the magnet holding member 20 to expose both end face portions 10b in the longitudinal direction (X direction) of the magnet 10.
- the opening 24 is formed so as to penetrate the magnet holding member 20 in the Z direction, and the end face portion (end face and a part of the outer portion 10a adjacent to the end face) 10b of the magnet 10 is exposed. It is formed so as to be in a state (a state not covered with resin).
- the outer portion 10a excluding the end face portion 10b of the magnet 10 is covered with the resin of the magnet accommodating portion 22 and integrated with the fixing portion 21, and the magnet unit 30 is composed of the magnet 10 and the magnet holding member 20. ..
- the magnet 10 and the collar 23 are insert-molded and fixed to the magnet accommodating portion 22 of the magnet holding member 20. That is, the magnet 10 is fixed to the magnet accommodating portion 22 of the magnet holding member 20 by pouring a resin material into the mold and curing the magnet 10 in a state where the magnet 10 is arranged in the mold and held by a holding pin or the like. Obtain unit 30.
- an opening 24 can be formed in the magnet accommodating portion 22 of the magnet holding member 20 so that the end face portion 10b of the magnet 10 is exposed without being covered with resin.
- the magnet unit 30A is such that the position of the magnet 10A can be restricted and attached to the magnet holding member 20A.
- the magnet unit 30A includes a positioning portion 60 composed of a concave portion 61 and a convex portion 62 that fit and position each other between the outer portion 10a of the magnet 10A and the magnet accommodating portion 22A of the magnet holding member 20A.
- the positioning portion 60 for example, the magnet 10A is provided with a concave portion 61, and the convex portion 62 fitted to the concave portion 61 is provided on the magnet holding member 20A to form the magnet unit 30A.
- the magnet 10A can be a magnet unit 30A whose position in the longitudinal direction (X direction) is regulated by the positioning portion 60.
- the positioning portion 60 may be provided with the concave portion 61 and the convex portion 62 on opposite sides so as to fit each other.
- the concave portion 61 is arranged in the central portion in the longitudinal direction of the magnet 10A
- the convex portion 62 is arranged in the central portion in the longitudinal direction of the magnet accommodating portion 22A of the magnet holding member 20A.
- the positioning portion 60 is not limited to the case where it is provided at one central portion in the longitudinal direction, and may be provided at a plurality of locations.
- the magnet holding member 20A includes a fixing portion 21A, and collars 23A are embedded at both ends thereof.
- the concave portion 61 at the center of the magnet 10A is formed as an annular recess 61A constricted in an annular shape on the circumference of the outer portion 10a.
- the convex portion 62 of the magnet holding member 20A is formed as an annular convex portion 62A protruding from the inner peripheral surface of the magnet accommodating portion 22A.
- the annular convex portion 62A protruding from the inner peripheral surface of the magnet accommodating portion 22A of the magnet holding member 20A is fitted into the annular concave portion 61A of the magnet 10A, whereby the position of the magnet 10A in the longitudinal direction (X direction). Is regulated and positioned.
- the size of the annular concave portion 61A and the annular convex portion 62A of the positioning portion 60 is such that the magnet 10A is longitudinally attached to the magnet accommodating portion 22A. It suffices if the position in the direction can be positioned, and it is preferable to suppress the influence of the magnet 10A on the magnetic field so that the magnetic field can be formed as uniform as possible. Further, after the magnet 10A is magnetized, the influence of the change in the magnetic field for forming the positioning portion 60 on the detection position is calibrated and adjusted.
- a concave portion 61 or a convex portion 62 is formed in advance on the magnet 10A.
- the magnet 10A and the collar 23A are insert-molded and fixed to the magnet accommodating portion 22A of the magnet holding member 20A. That is, the magnet 10A is placed in the mold and held by a holding pin or the like, and the resin material is poured into the mold and cured so that the magnet 10A is placed in the magnet accommodating portion 22A of the magnet holding member 20A. It is fixed by the annular recess 61A and the annular protrusion 62A. After that, the magnet 10A is magnetized to obtain the magnet unit 30A.
- annular concave portion 61A and the annular convex portion 62A instead of the annular concave portion 61A and the annular convex portion 62A, a partial annular concave portion 61 or a partial annular convex portion 62 may be used.
- the facing surface side (+ Z direction side in the illustrated example) of the magnet unit 30A facing the magnetic detection unit 40 of the magnetic detection means 41 is a uniform surface on which the concave portion 61 and the convex portion 62 are not formed. It is preferable to do so. By doing so, the magnetic field generated by the magnet 10A of the magnet unit 30A can be uniformly formed on the facing surface side.
- the concave portion 61 and the convex portion 62 are positioned by abutting on both end surfaces of the arc, and the positioning is performed only in the longitudinal direction (X direction). Instead, positioning can be performed in the rotation direction around the axis (rotation direction around the X axis) about the longitudinal direction.
- the length of a part of the ring shape (length of the arc) of the concave portion 61 and the convex portion 62 may be set arbitrarily as long as the magnet 10A can be positioned on the magnet accommodating portion 22A.
- the magnet unit 30B has a different configuration of a positioning portion 60 that regulates the position of the magnet 10B with respect to the magnet holding member 20B and attaches the magnet unit 30B.
- the magnet unit 30B includes a positioning portion 60 composed of a concave portion 61 and a convex portion 62 that fit and position each other between the outer portion 10a of the magnet 10B and the magnet accommodating portion 22B of the magnet holding member 20B.
- the magnet 10B is provided with a concave portion 61, and the convex portion 62 fitted to the concave portion 61 is provided on the magnet holding member 20B to form the magnet unit 30B.
- the positioning portion 60 may be provided with the concave portion 61 and the convex portion 62 on opposite sides so as to fit each other.
- the concave portion 61 is arranged in the central portion in the longitudinal direction of the magnet 10B
- the convex portion 62 is arranged in the central portion in the longitudinal direction of the magnet accommodating portion 22B of the magnet holding member 20B.
- the magnet holding member 20B includes a fixing portion 21B, and collars 23B are embedded at both ends thereof.
- the concave portion 61 at the center of the magnet 10B is formed as a D-shaped concave portion 61B which is a first plane portion cut out in parallel on both sides of the outer portion 10a with the central axis sandwiched therein.
- the convex portion 62 of the magnet holding member 20B is formed as a D-shaped convex portion 62B which is a second plane portion protruding in parallel from both sides of the inner peripheral surface of the magnet accommodating portion 22B.
- the position of the magnet 10B can be detected with high accuracy by suppressing the rotation around the axis. Further, by fitting the D-shaped convex portion 62B protruding from the inner peripheral surface of the magnet accommodating portion 22B of the magnet holding member 20B into the D-shaped concave portion 61B of the magnet 10B, the position of the magnet 10B in the longitudinal direction (X direction) can be changed. It is regulated and positioned. In addition to this, in the magnet unit 30B, the positions of the D-shaped concave portion 61B and the D-shaped convex portion 62B in the direction intersecting the direction along the plane (for example, the direction orthogonal to the plane) can also be regulated.
- the position of the magnet 10B and the magnet accommodating portion 22B of the magnet holding member 20B in the Y direction can be regulated.
- the position in the Z direction can be regulated.
- the rotation around the central axis of the magnet 10B (around the X axis) can be regulated, the rotation around the central axis of the magnet 10B can be suppressed, and the position of the magnet 10B can be detected with high accuracy.
- the size of the D-shaped concave portion 61B and the D-shaped convex portion 62B of the positioning portion 60 makes the magnet 10B a magnet accommodating portion. It suffices if it can be positioned at 22B, and it is preferable to suppress the influence of the magnet 10B on the magnetic field so that a uniform magnetic field can be formed as much as possible. Further, after the magnet 10B is magnetized, the influence of the change in the magnetic field for forming the positioning portion 60 on the detection position is calibrated and adjusted.
- a concave portion 61 or a convex portion 62 is formed in advance on the magnet 10B.
- the magnet 10B and the collar 23B are insert-molded and fixed to the magnet accommodating portion 22B of the magnet holding member 20B. That is, the magnet 10B is placed in the mold and held by a holding pin or the like, and the resin material is poured into the mold and cured so that the magnet 10B is placed in the magnet accommodating portion 22B of the magnet holding member 20B. It is fixed by the D-shaped concave portion 61B and the D-shaped convex portion 62B. After that, the magnet 10B is magnetized to obtain the magnet unit 30B.
- the positioning portion 60 by the D-shaped concave portion 61B and the D-shaped convex portion 62B, not only the longitudinal direction (X direction) but also the axial rotation direction centered on the longitudinal direction (rotation direction around the X axis). Can be positioned.
- the D-shaped concave portion 61B and the D-shaped convex portion 62B may be provided on only one side.
- the facing surface side (+ Z direction side) of the magnet unit 30B facing the magnetic detection unit 40 of the magnetic detecting means 41 is a uniform surface, and D is on the lower surface side ( ⁇ Z direction side).
- the shaped concave portion 61B and the D-shaped convex portion 62B are formed. By doing so, the magnetic field generated by the magnet 10B of the magnet unit 30B can be uniformly formed on the facing surface side.
- the magnet unit 30C has a different configuration of a positioning portion 60 that regulates the position of the magnet 10C with respect to the magnet holding member 20C and attaches the magnet unit 30C.
- the magnet unit 30C includes a positioning portion 60 composed of a concave portion 61 and a convex portion 62 that fit and position each other between the outer portion 10a of the magnet 10C and the magnet accommodating portion 22C of the magnet holding member 20C.
- the magnet 10C is provided with a concave portion 61, and the convex portion 62 fitted to the concave portion 61 is provided on the magnet holding member 20C to form the magnet unit 30C.
- the positioning portion 60 may be provided with the concave portion 61 and the convex portion 62 on opposite sides so as to fit each other.
- the concave portion 61 is arranged in the central portion in the longitudinal direction of the magnet 10C
- the convex portion 62 is arranged in the central portion in the longitudinal direction of the magnet accommodating portion 22C of the magnet holding member 20C.
- the magnet holding member 20C includes a fixing portion 21C, and collars 23C are embedded at both ends thereof.
- the concave portion 61 at the center of the magnet 10C is formed in the radial direction from the outer portion 10a and penetrates therethrough, for example, as a columnar columnar recess 61C formed in the left-right direction (Y direction).
- the convex portion 62 of the magnet holding member 20C is formed in the left-right direction (Y direction) as, for example, a columnar columnar convex portion 62C protruding from the inner peripheral surface of the magnet accommodating portion 22C.
- the columnar convex portion 62C protruding from the inner peripheral surface of the magnet accommodating portion 22C of the magnet holding member 20C is fitted into the columnar concave portion 61C of the columnar through hole of the magnet 10C, whereby the length of the magnet 10C is lengthened.
- the position in the direction (X direction) is regulated and positioned.
- the positions of the columnar concave portion 61C and the columnar convex portion 62C other than the central axis direction can be regulated.
- the position of the columnar recess 61C in the direction intersecting the central axis direction (direction other than the central axis direction) can be regulated.
- the size of the columnar concave portion 61C and the columnar convex portion 62C of the positioning portion 60 is sufficient if the magnet 10C can be positioned on the magnet accommodating portion 22C, and the influence of the magnet 10C on the magnetic field can be suppressed as much as possible. It is preferable that a uniform magnetic field can be formed, and it is preferable that the magnet 10C is not exposed on the upper surface (the surface facing the magnetic detection unit 40). Further, after the magnet 10C is magnetized, the influence of the change in the magnetic field for forming the positioning portion 60 on the detection position is calibrated and adjusted.
- a concave portion 61 or a convex portion 62 is formed in advance on the magnet 10C.
- the magnet 10C and the collar 23C are insert-molded and fixed to the magnet accommodating portion 22C of the magnet holding member 20C. That is, the magnet 10C is placed in the mold and held by a holding pin or the like, and the resin material is poured into the mold and cured so that the magnet 10C is placed in the magnet accommodating portion 22C of the magnet holding member 20C. It is fixed by the columnar concave portion 61C and the columnar convex portion 62C. After that, the magnet 10C is magnetized to obtain the magnet unit 30C.
- the positions of the columnar concave portion 61C and the columnar convex portion 62C are positioned not only in the longitudinal direction (X direction) but also in directions other than the central axial direction of the pillar. can do.
- the columnar concave portion 61C and the columnar convex portion 62C may be provided at a plurality of locations instead of being provided at one location. Further, the columnar concave portion 61C and the columnar convex portion 62C may be provided at one or a plurality of locations without penetrating the magnet 10C. In this case, it is preferable that the facing surface side (+ Z direction side) of the magnet unit 30C facing the magnetic detection unit 40 of the magnetic detecting means 41 is a uniform surface. By doing so, the magnetic field generated by the magnet 10C of the magnet unit 30C can be uniformly formed on the facing surface side.
- the magnet unit 30D is different from the magnet unit 30C described with reference to FIG. 5 in the configuration of the positioning portion 60 for restricting and attaching the position of the magnet 10D to the magnet holding member 20D. Similar to the magnet unit 30C, the magnet unit 30D is positioned by a concave portion 61 and a convex portion 62 that fit and position each other between the outer portion 10a of the magnet 10D and the magnet accommodating portion 22D of the magnet holding member 20D. A unit 60 is provided.
- the concave portion 61 is provided on the magnet 10D in the vertical direction (Z direction), and the convex portion 62 fitted to the concave portion 61 is provided in the vertical direction (Z direction) of the magnet holding member 20D.
- the magnet unit 30D is configured.
- the positioning portion 60 may be provided with the concave portion 61 and the convex portion 62 on opposite sides so as to fit each other.
- a concave portion 61 is arranged in the vertical direction of the central portion in the longitudinal direction of the magnet 10D, and correspondingly, a convex portion in the vertical direction of the central portion in the longitudinal direction of the magnet accommodating portion 22D of the magnet holding member 20D.
- 62 is arranged.
- the magnet holding member 20D includes a fixing portion 21D, and collars 23D are embedded at both ends thereof.
- the concave portion 61 at the center of the magnet 10D is formed and penetrates in the radial direction from the outer portion 10a, for example, as a columnar columnar recess 61D that penetrates in the vertical direction.
- the convex portion 62 of the magnet holding member 20D is formed in the vertical direction as, for example, a columnar columnar convex portion 62D protruding from the inner peripheral surface of the magnet accommodating portion 22D.
- the columnar convex portion 62D protruding vertically from the inner peripheral surface of the magnet accommodating portion 22D of the magnet holding member 20D is fitted into the columnar concave portion 61D of the columnar through hole of the magnet 10D to fit the magnet.
- the positions of the 10D in the longitudinal direction (X direction) and the direction orthogonal to the longitudinal direction (Y direction) are regulated and positioned. Further, in the magnet unit 30D, the positions of the columnar concave portion 61D and the columnar convex portion 62D other than the central axis direction (Z direction) can be regulated. For example, the position of the columnar recess 61D in the direction intersecting the central axis direction (Z direction) (direction other than the central axis direction) can be regulated.
- the size of the columnar concave portion 61D and the columnar convex portion 62D of the positioning portion 60 is sufficient if the magnet 10D can be positioned on the magnet accommodating portion 22D, and the influence of the magnet 10D on the magnetic field can be suppressed as much as possible. It is preferable to be able to form a uniform magnetic field. Further, after the magnet 10D is magnetized, the influence of the change in the magnetic field for forming the positioning portion 60 on the detection position is calibrated and adjusted.
- a concave portion 61 or a convex portion 62 is formed in advance on the magnet 10D.
- the magnet 10D and the collar 23D are insert-molded and fixed to the magnet accommodating portion 22D of the magnet holding member 20D. That is, the magnet 10D is placed in the mold and held by a holding pin or the like, and the resin material is poured into the mold and cured so that the magnet 10D is placed in the magnet accommodating portion 22D of the magnet holding member 20D. It is fixed by the columnar concave portion 61D and the columnar convex portion 62D. After that, the magnet 10D is magnetized to obtain the magnet unit 30D.
- the positioning portion 60 by the columnar concave portion 61D and the columnar convex portion 62D, not only the longitudinal direction (X direction) and the direction orthogonal to the longitudinal direction (Y direction) but also the columns of the columnar concave portion 61C and the columnar convex portion 62C can be provided. Positions in directions other than the central axis direction (vertical direction) can be positioned.
- the columnar concave portion 61D and the columnar convex portion 62D may be provided at a plurality of locations instead of being provided at one location. Further, the columnar concave portion 61D and the columnar convex portion 62D may be provided at one or a plurality of locations without penetrating the magnet 10D. In this case, it is preferable that the facing surface side (+ Z direction side) of the magnet unit 30D facing the magnetic detection unit 40 of the magnetic detecting means 41 is a uniform surface. By doing so, the magnetic field generated by the magnet 10D of the magnet unit 30D can be uniformly formed on the facing surface side.
- the magnet holding member may have a rectangular parallelepiped shape with the longitudinal direction as the X direction. It should be attached to 20, 20A to 20D.
- the magnetizing direction is not limited to the case where the magnetism is arranged along the longitudinal direction (X direction), and the magnetism may be performed along the vertical direction (Z direction).
- the shape of the openings 24, 24A to 24D is not limited to the case where the holes are rectangular through holes, and the end face portion 10b is a magnet in response to the difference in thermal expansion in the temperature environment in which the magnet units 30, 30A to 30D are used. Any shape may be used as long as it can form a gap in which stress is not applied without contacting the accommodating portions 22, 22A to 22D.
- the case where the detected body L moves linearly has been described as an example, but it can also be applied to the position detection when the detected body L rotates around the central axis, and the magnet 10,
- the position may be detected by detecting the change in the magnetic field due to the rotational movement of 10A to 10D.
- the facing surface side (+ Z direction side) of the magnet units 30 and 30A to 30D facing the magnetic detection unit 40 of the magnetic detection means 41 is a uniform surface, and a columnar magnet or an upper surface thereof. It is preferable that the side is a magnet having a convex curved surface on the facing surface side. Further, it can be applied not only to detect one of the linear movement and the rotational movement of the object L to be detected, but also to detect both the linear movement and the rotational movement.
- the position detection device 1 of the present invention includes a magnetic detection unit 40 having a magnet unit 30 and a magnetic detection element (magnetic detection means) 41 facing the magnet unit 30, and a case 50 accommodating the magnetic detection unit 40. Be prepared.
- the position detection device 1 includes a magnet unit 30 (30A to 30D) already described, and is a magnetic detection unit having a magnetic detection element (magnetic detection means) 41 for changing a magnetic field due to relative movement of the magnet 10 (10A to 10D). The position is detected by detecting with 40.
- a case where the magnet unit 30 is used will be described as an example.
- the magnet unit 30 is fixed to the notch La of the object to be detected and linearly moved, and the case 50 is attached to the device or the like with respect to the magnet unit 30. Is fixed, and the change in the magnetic field due to the relative movement of the magnet 10 of the magnet unit 30 is detected by the magnetic detection element 41 of the magnetic detection unit 40 to detect the position.
- a magnetic detection element 41 and an electronic component are mounted on a circuit board 42 and electrically connected.
- the magnetic detection element 41 is composed of a Hall IC or the like that senses a change in the magnetic field accompanying the movement of the object L to be detected.
- the electronic component is composed of components such as an IC chip that processes the output signal of the magnetic detection element 41 and a capacitor that constitutes a protection circuit.
- the magnetic detection element 41 and the electronic component are attached to the substantially central portion of the surface of the circuit board 42 in the ⁇ Z direction.
- a wiring pattern (not shown) is formed on the circuit board 42 to electrically connect the magnetic detection element 41 and electronic components.
- the wiring pattern is composed of four wirings, including two wirings for power supply and two wirings for extracting a signal from the magnetic detection unit 40, while connecting electronic components.
- the circuit board 42 is housed in the main body case 51 that constitutes the case 50 (see FIG. 1).
- Lead terminals (not shown) are connected to the wiring pattern of the circuit board 42, and the lead terminals are insert-molded and arranged in the connector case 52 formed integrally with the main body case 51 constituting the case 50 for external connection. Configure the connection terminals.
- the case 50 includes a main body case 51 for accommodating the circuit board 42 and a connector case 52 for accommodating the lead terminals, and the main body case 51 and the connector case 52 are integrated to form one case 50. ing.
- the case 50 is made of a synthetic resin such as PPS (Poly Phenylene Sulfide) resin and has a substantially elliptical columnar shape hollow at the end in the ⁇ X direction of a substantially diamond-shaped main body case 51 long in the Y direction.
- the connector case 52 of the above is integrally provided with a step and is formed in a substantially L shape.
- fixing bolt insertion holes 53 for fixing the magnetic detection unit 40 to the relatively moving object to be detected L are formed and made of metal.
- Collar 54 is insert-molded and reinforced.
- the main body case 51 is fixed to a device or the like with a bolt inserted into the collar 54 so as to face the magnet unit 30 which is fixed to the notch portion La of the detected body L and is linearly moved.
- the connector case 52 is housed so that four lead terminals protrude inside the hollow, and by connecting a connector (not shown), power can be supplied from the outside and an output signal can be taken out.
- the case 50 of the position detecting device 1 is fixed to the device across the shaft which is the detected body L via the collars 54 at both ends, and the magnet unit 30 attached to the detected body L.
- the magnetic detection unit 40 is installed so as to face the magnet 10.
- the facing surface side (+ Z direction side) of the magnet units 30, 30A to 30D facing the magnetic detection unit 40 of the magnetic detection means 41 is a uniform surface, and a columnar magnet or an upper surface thereof. It is preferable to use a magnet having a curved surface whose side is convex on the opposite surface side.
- the magnetic field in the linear direction is applied to the circuit board 42.
- a magnetic detection element (not shown) that detects the change in the magnetic field in the rotation direction is provided.
- the magnetic detection element that detects the change in the magnetic field in the rotation direction may be provided in the same IC package as the magnetic detection element 41.
- the magnetic detection element 41 can detect a change in the magnetic field due to the linear movement or rotational movement of the object L to be detected, and can detect a position associated with the linear movement or a position associated with the rotational movement.
- the magnet unit 30 prevents the stress due to the difference in thermal expansion between the magnet 10 and the magnet holding member 20 from acting on the magnet holding member 20. As a result, there is no risk of damage such as cracks, the thermal impact resistance is excellent, and the position can be detected with high accuracy.
- the magnet unit 30 includes a magnet 10 that linearly or rotationally moves with respect to a magnetic detection element (magnetic detection means) 41 that detects a change in a magnetic field, and a magnet to be detected.
- a magnet unit 30 including a magnet holding member 20 fixed to L and linearly or rotationally moving and to which a magnet 10 is attached.
- the magnet holding member 20 is a fixing portion 21 fixed to the detected body L.
- a magnet accommodating portion 22 to which the magnet 10 is attached is provided, and the magnet accommodating portion 22 is formed with an opening 24 in which both end surface portions 10b of the magnet 10 in the longitudinal direction are exposed.
- both end surface portions 10b of the magnet 10 are attached to the magnet accommodating portion 22 of the magnet holding member 20 in a state of being exposed by the opening 24, thermal expansion is performed between the magnet 10 and the magnet holding member 20. Even if there is a difference, the stress does not act on the magnet holding member 20, the occurrence of damage such as cracks is suppressed, and the magnet unit 30 having excellent thermal shock resistance can be obtained. Further, by attaching the magnet 10 to a predetermined position of the magnet holding member 20, the position can be detected with high accuracy.
- the magnet holding member 20 includes a positioning portion 60 formed by a concave portion 61 and a convex portion 62 that fit and position each other between the outer portion 10a of the magnet 10 and the magnet accommodating portion 22. There is. According to such a configuration, even if both end surface portions 10b of the magnet 10 are attached to the magnet accommodating portion 22 of the magnet holding member 20 in a state of being exposed by the opening 24, the concave portion 61 and the convex portion 62 of the positioning portion 60 are mutually connected. By fitting, it is possible to position at least in the longitudinal direction, ensure heat impact resistance, and at the same time, by attaching the magnet 10 to a predetermined position of the magnet holding member 20, the position can be detected with high accuracy. ..
- the positioning portion 60 is formed at the central portion in the longitudinal direction of the magnet 10 and the magnet accommodating portion 22. According to this configuration, the magnet 10 expands and contracts from the central portion positioned by the positioning portion 60 toward both end surface portions 10b due to the difference in thermal expansion, so that the influence of thermal expansion can be suppressed to half or the like. At the same time as ensuring thermal shock resistance, the position can be detected with high accuracy.
- the positioning portion 60 is an annular at least a part of the annular convex portion (convex portion) that fits into the annular concave portion (concave portion) 61A and at least a part of the annular concave portion 61A. ) It is composed of 62A.
- the magnet 10A of the magnet unit 30A and the magnet holding member 20A are positioned by positioning the annular concave portion (concave portion) 61A and the annular convex portion (convex portion) 62A fitted in the annular concave portion 61A. Positioning can be performed reliably, heat impact resistance can be ensured, and at the same time, the position can be detected accurately by the positioned magnet 10A.
- annular recess (concave portion) 61A and the annular convex portion (convex portion) 62A fitted to the annular recess 61A are not annular, but are formed of a part of the annular, the magnet 10A and the magnet holding member can be formed. Positioning around the rotation axis between 20A can be performed, and positioning can be performed with higher accuracy.
- the positioning portions 60 are D-shaped recesses (concave portions having a first flat surface portion) 61B and D formed on at least one side of the outer side portion 10a of the magnet 10B and the magnet accommodating portion 22B in the longitudinal direction. It is composed of a convex portion (a convex portion having a second flat portion that comes into contact with the first flat portion) 62B. According to such a configuration, the magnet 10B of the magnet unit 30B and the magnet holding member 20B can be reliably positioned, the thermal shock resistance can be ensured, and at the same time, the position can be detected accurately by the positioned magnet 10B. .. Further, the D-shaped concave portion 61B and the D-shaped convex portion 62B can perform positioning around the rotation axis between the magnet 10B and the magnet holding member 20B, and the positioning can be performed with higher accuracy.
- the positioning portion 60 is composed of a columnar concave portion (columnar concave portion) 61C and a columnar convex portion (columnar convex portion) 62C that fits into the columnar concave portion 61C.
- the magnet 10C of the magnet unit 30C and the magnet holding member 20C can be reliably positioned, the thermal shock resistance can be ensured, and at the same time, the position can be detected accurately by the positioned magnet 10C. ..
- the columnar concave portion 61C and the columnar convex portion 62C can perform positioning around the rotation axis between the magnet 10C and the magnet holding member 20C, and the positioning can be performed with higher accuracy.
- the magnetic field on the surface of the magnet 10C can be uniformly formed. Further, by forming the columnar recess 61C so as to penetrate the magnet 10C and fitting the columnar convex portion 62C so as to fill the columnar convex portion 62C, the magnet 10C of the magnet unit 30C and the magnet holding member 20C are surely filled with resin. Can be positioned. As a result, the heat impact resistance can be ensured, and at the same time, the position can be detected accurately by the positioned magnet 10C.
- the positioning portion 60 is composed of a columnar concave portion (columnar concave portion) 61D in the vertical direction and a vertical columnar convex portion (columnar convex portion) 62D that fits into the columnar concave portion 61D. .. According to such a configuration, the magnet 10D of the magnet unit 30D and the magnet holding member 20D can be reliably positioned, the thermal shock resistance can be ensured, and at the same time, the position can be detected accurately by the positioned magnet 10D. ..
- the columnar concave portion 61D and the columnar convex portion 62D can perform positioning around the rotation axis between the magnet 10D and the magnet holding member 20D, and the positioning can be performed with higher accuracy. If the concave portion 61 and the convex portion 62 of the positioning portion 60 are not positioned on the surface of the magnet 10D, the magnetic field on the surface of the magnet 10D can be uniformly formed. Further, by forming the columnar recess 61D so as to penetrate the magnet 10D in the vertical direction and fitting the columnar convex portion 62D so as to fill the columnar convex portion 62D, the magnet 10D of the magnet unit 30D and the magnet holding member 20D can be reliably connected to each other. It can be filled with resin and positioned. As a result, the heat impact resistance can be ensured, and at the same time, the position can be accurately detected by the positioned magnet 10D.
- the position detection device 1 includes a magnet 10 that linearly moves or rotates with respect to a magnetic detection element (magnetic detection means) 41 that detects a change in a magnetic field, and a magnet that is fixed to the object L to be detected and linearly moves or rotates.
- a magnet unit 30 including a magnet holding member 20 to which the 10 is attached, a magnetic detection unit 40 having a magnetic detection element 41 facing the magnet unit 30, and a case 50 in which the magnetic detection unit 40 is housed are provided.
- the magnetic detection element 41 can detect the change in the magnetic field due to the linear movement or the rotational movement of the object L to be detected, and can detect the position due to the linear movement and the position due to the rotational movement.
- the magnet unit 30 prevents the stress due to the difference in thermal expansion between the magnet 10 and the magnet holding member 20 from acting on the magnet holding member 20 and cracks. There is no risk of damage such as, and it has excellent thermal shock resistance, and the position can be detected with high accuracy.
- the present invention is not limited to this, and the position of the detected body L that moves linearly or rotationally is not limited to this. It can be applied to detection.
- the present invention can be configured alone or in combination of the configurations described in each embodiment. Further, the present invention is not limited to the above embodiment.
- the materials such as magnets, magnet holding members, and cases are not limited to the above description, and may be changed to those having the same function.
- the magnetic detection element is not limited to the Hall IC, and other elements may be used.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
温度変化による損傷が生じるおそれがなく耐熱衝撃性に優れ、精度良く位置を検出することができる磁石ユニット及び位置検出装置を提供する。 磁石ユニット30は、磁界の変化を検出する磁気検出素子(磁気検出手段)に対して直線移動または回転移動する磁石10と、被検出体Lに固定されて直線移動または回転移動し、磁石10が取り付けられる磁石保持部材20と、を備える磁石ユニット30であって、磁石保持部材20は、被検出体Lに固定される固定部21と、磁石10が取り付けられる磁石収容部22と、を備え、磁石収容部22は、磁石10の両端面部10bが露出される開口部24が形成される。
Description
本発明は磁石ユニット及び位置検出装置に関する。
直線移動や回転移動する被検出体の位置を検出するため位置検出装置が用いられている。例えば、特許文献1に開示されている回転移動の位置検出装置は、磁石と磁石が取り付けられて回転する磁石保持部材とを備える磁石ユニットと、磁石ユニットの磁石と対向し、磁石の回転移動に伴う磁界の変化を検出する磁気検出手段を有するハウジングと、を有して構成されている。磁石ユニットは、磁石を樹脂製の磁石保持部材にインサート成形され、被検出体に連結されて回転される。
この特許文献1に開示された磁石の移動に伴う磁界の変化を検出する位置検出装置で、被検出体の直線移動を検出する場合には、被検出体の直線移動方向に沿って磁石ユニットを取り付ける必要があり、直線移動の移動量が大きくなると磁石を長くする必要がある。磁石ユニットで樹脂製の磁石保持部材にインサート成形される磁石を長くすると、磁石と樹脂部の温度変化による線膨張差で樹脂部に応力が加わり、クラックなどの損傷が生じ、耐熱衝撃性の低下を招くおそれがある。
本発明は、上記問題点に鑑みてなされたものであり、温度変化による損傷が生じるおそれがなく耐熱衝撃性に優れ、精度良く位置を検出することができる磁石ユニット及び位置検出装置を提供することを目的とする。
上記目的を達成するため、本発明の第1の観点に係る磁石ユニットは、
磁界の変化を検出する磁気検出手段に対して直線移動または回転移動する磁石と、
被検出体に固定されて直線移動または回転移動し、前記磁石が取り付けられる磁石保持部材と、を備える磁石ユニットであって、
前記磁石保持部材は、
前記被検出体に固定される固定部と、
前記磁石が取り付けられる磁石収容部と、を備え、
前記磁石収容部は、前記磁石の長手方向の両端面部が露出される開口部が形成される、
ことを特徴とする。
磁界の変化を検出する磁気検出手段に対して直線移動または回転移動する磁石と、
被検出体に固定されて直線移動または回転移動し、前記磁石が取り付けられる磁石保持部材と、を備える磁石ユニットであって、
前記磁石保持部材は、
前記被検出体に固定される固定部と、
前記磁石が取り付けられる磁石収容部と、を備え、
前記磁石収容部は、前記磁石の長手方向の両端面部が露出される開口部が形成される、
ことを特徴とする。
また、本発明の第2の観点に係る位置検出装置は、
磁界の変化を検出する磁気検出手段に対して直線移動または回転移動する磁石と、
被検出体に固定されて直線移動または回転移動し、前記磁石が取り付けられる磁石保持部材と、を備える磁石ユニットと、
前記磁石ユニットと対向する前記磁気検出手段を有する磁気検出部と、
前記磁気検出部が収容されるケースと、を備える、
ことを特徴とする。
磁界の変化を検出する磁気検出手段に対して直線移動または回転移動する磁石と、
被検出体に固定されて直線移動または回転移動し、前記磁石が取り付けられる磁石保持部材と、を備える磁石ユニットと、
前記磁石ユニットと対向する前記磁気検出手段を有する磁気検出部と、
前記磁気検出部が収容されるケースと、を備える、
ことを特徴とする。
本発明によれば、温度変化による損傷が生じるおそれがなく耐熱衝撃性に優れ、精度良く位置を検出することができる。
以下に、本発明の一実施の形態に係る磁石ユニット及び位置検出装置を添付図面に基づいて説明する。
なお、以下の説明では、図1に示した位置検出装置1の状態を基準として、前後方向をX方向、左右方向をY方向、上下方向をZ方向とする。また、X方向、Y方向及びZ方向を示す矢印が向く方向を+(プラス)方向、その反対方向を-(マイナス)方向として説明する。
位置検出装置1は、図1、図2、図7に示すように、磁石10と磁石保持部材20とを有する磁石ユニット30と、磁気検出手段41を有する磁気検出部40と、ケース50と、を備えて構成される。
本実施の形態に係る位置検出装置1は、例えば自動車の自動変速機の操作レバーのセレクト位置(±X方向に直線移動する位置)の検出等に用いられる。
磁石ユニット30は、被検出体Lである操作レバーに固定され、被検出体Lの移動量が大きく、長い磁石10を用いる場合であっても温度変化などによる磁石ユニット30の損傷を招くことないようにしたものである。また、位置検出装置1は、磁石ユニット30の相対移動に伴う磁界の変化を検出することで、精度良く位置(X方向の位置)を検出できるようにしたものである。また、磁石ユニット30及び位置検出装置1は、ともに耐熱衝撃性に優れたものとなる。
なお、以下の説明では、図1に示した位置検出装置1の状態を基準として、前後方向をX方向、左右方向をY方向、上下方向をZ方向とする。また、X方向、Y方向及びZ方向を示す矢印が向く方向を+(プラス)方向、その反対方向を-(マイナス)方向として説明する。
位置検出装置1は、図1、図2、図7に示すように、磁石10と磁石保持部材20とを有する磁石ユニット30と、磁気検出手段41を有する磁気検出部40と、ケース50と、を備えて構成される。
本実施の形態に係る位置検出装置1は、例えば自動車の自動変速機の操作レバーのセレクト位置(±X方向に直線移動する位置)の検出等に用いられる。
磁石ユニット30は、被検出体Lである操作レバーに固定され、被検出体Lの移動量が大きく、長い磁石10を用いる場合であっても温度変化などによる磁石ユニット30の損傷を招くことないようにしたものである。また、位置検出装置1は、磁石ユニット30の相対移動に伴う磁界の変化を検出することで、精度良く位置(X方向の位置)を検出できるようにしたものである。また、磁石ユニット30及び位置検出装置1は、ともに耐熱衝撃性に優れたものとなる。
磁石ユニット30は、磁石10と、磁石保持部材20と、を備えて構成される。
磁石10は、例えばサマリウムコバルト磁石(SmCo:Samarium-Cobalt)で構成され、粉末原料を圧縮成形して焼結することで、例えば略円柱形状などの所望の形状に形成される。磁石10は、2つの磁極が、例えば円柱形状の中心軸に沿う方向(長手方向、X方向)に並ぶように着磁される。
磁石10は、磁界の変化を検出する磁気検出手段41に対して直線移動される。磁石10は、磁石保持部材20に取り付けられて磁石ユニット30とされる。磁石10は、磁石ユニット30を被検出体Lに固定することで、その円柱形状の中心軸方向(X方向)に沿って直線移動される。
磁石10の着磁は、例えば、未着磁状態の磁石10を、後述する樹脂製の磁石保持部材20にインサート成形により取り付けた後に行われる。こうすることで、磁石保持部材20の所定の位置に固定した状態の磁石10として着磁した磁石ユニット30とすることができる。
磁石10の直線移動にともなう磁界の変化が、後述するケース50に収容されて磁石10と対向する磁気検出手段41を備える磁気検出部40で検出される。
磁石10は、例えばサマリウムコバルト磁石(SmCo:Samarium-Cobalt)で構成され、粉末原料を圧縮成形して焼結することで、例えば略円柱形状などの所望の形状に形成される。磁石10は、2つの磁極が、例えば円柱形状の中心軸に沿う方向(長手方向、X方向)に並ぶように着磁される。
磁石10は、磁界の変化を検出する磁気検出手段41に対して直線移動される。磁石10は、磁石保持部材20に取り付けられて磁石ユニット30とされる。磁石10は、磁石ユニット30を被検出体Lに固定することで、その円柱形状の中心軸方向(X方向)に沿って直線移動される。
磁石10の着磁は、例えば、未着磁状態の磁石10を、後述する樹脂製の磁石保持部材20にインサート成形により取り付けた後に行われる。こうすることで、磁石保持部材20の所定の位置に固定した状態の磁石10として着磁した磁石ユニット30とすることができる。
磁石10の直線移動にともなう磁界の変化が、後述するケース50に収容されて磁石10と対向する磁気検出手段41を備える磁気検出部40で検出される。
磁石保持部材20は、被検出体Lに固定される固定部21と、磁石10が収容されて取り付けられる磁石収容部22と、を備える。磁石保持部材20は、例えば、ポリブチレンテレフタレート等の熱可塑性樹脂から形成される。磁石保持部材20の固定部21は、図1、図2に示すように、平面視、X方向が長くY方向が短い略ひし形状とされてX方向の両端部が円弧状とされ、底面部(-Z方向の底面部分)21aが平坦とされた板状に形成されている。固定部21は、X方向の両端部に補強用の金属製のカラー23がインサート成形されて埋設して取り付けられている。固定部21のカラー23にボルトなどを挿通して被検出体Lの切り欠き部Laに当てて固定できるようにしてある。
磁石保持部材20は、固定部21の中央部の平坦な底面部21a上に磁石収容部22を備える。磁石保持部材20には、円柱形状の磁石10が中心軸を被検出体Lの移動方向(X方向)に沿うように取り付けられる。磁石保持部材20は、固定部21の板厚さが磁石10の直径より薄く形成されており、磁石収容部22に収容された磁石10が固定部21から上方(Z方向)に突き出すように収容され、磁石10の外側部10aが樹脂で覆われることで取り付けられている。
磁石保持部材20は、固定部21の中央部の平坦な底面部21a上に磁石収容部22を備える。磁石保持部材20には、円柱形状の磁石10が中心軸を被検出体Lの移動方向(X方向)に沿うように取り付けられる。磁石保持部材20は、固定部21の板厚さが磁石10の直径より薄く形成されており、磁石収容部22に収容された磁石10が固定部21から上方(Z方向)に突き出すように収容され、磁石10の外側部10aが樹脂で覆われることで取り付けられている。
磁石10と磁石保持部材20とで構成される磁石ユニット30では、磁石保持部材20の磁石収容部22が樹脂製とされるのに対し、磁石10は金属製であることから、磁石10を磁石収容部22の樹脂で完全に覆った状態とすると、温度変化に対して熱膨張差が生じ、特に磁石10の長手方向に対する熱膨張差の影響や耐熱衝撃性が問題となる。
そこで、磁石ユニット30では、磁石保持部材20の磁石収容部22に磁石10の長手方向(X方向)の両方の端面部10bを露出させる開口部24が形成してある。開口部24は、図2に示すように、磁石保持部材20のZ方向に貫通して形成され、磁石10の端面部(端面および端面に隣接する外側部10aの一部)10bが露出される状態(樹脂に覆われない状態)となるように形成されている。これにより、磁石10の端面部10bを除く外側部10aが磁石収容部22の樹脂で覆われて固定部21と一体とされ、磁石10と磁石保持部材20とによる磁石ユニット30が構成されている。
磁石ユニット30は、磁石保持部材20の磁石収容部22に磁石10およびカラー23がインサート成形されて固定される。すなわち、金型内に磁石10を配置して保持ピンなどで保持した状態で金型内に樹脂材料を流し込み、硬化させることにより磁石10が磁石保持部材20の磁石収容部22に固定された磁石ユニット30を得る。
磁石ユニット30は、磁石保持部材20の磁石収容部22に磁石10およびカラー23がインサート成形されて固定される。すなわち、金型内に磁石10を配置して保持ピンなどで保持した状態で金型内に樹脂材料を流し込み、硬化させることにより磁石10が磁石保持部材20の磁石収容部22に固定された磁石ユニット30を得る。
このような磁石ユニット30では、磁石保持部材20の磁石収容部22に開口部24を形成し、磁石10の端面部10bを樹脂で覆うことなく露出させた状態にできる。これにより、磁石収容部22と磁石10との間に温度変化による熱膨張差などが生じても、応力が磁石10を介して磁石収容部22の樹脂に作用することが抑制され、クラックの発生や損傷を防止することができ、耐熱衝撃性に優れる。特に、被検出体Lの移動量が大きく、磁石10を中心軸方向(X方向)に長くする必要がある場合でも熱膨張差を逃がし、磁石10による磁石保持部材20の熱衝撃などによるクラックの発生や損傷を防止することができる。
次に、磁石ユニットの他の実施の形態について、図面により説明する。
磁石ユニット30Aは、図3に示すように、磁石保持部材20Aに対して磁石10Aの位置を規制して取り付けることができるようにしたものである。磁石ユニット30Aは、磁石10Aの外側部10aと磁石保持部材20Aの磁石収容部22Aとの間に互いを嵌合して位置決めする凹状部61と凸状部62とによる位置決め部60を備える。位置決め部60は、例えば、磁石10Aに凹状部61が設けられ、この凹状部61に嵌合する凸状部62が磁石保持部材20Aに設けられて磁石ユニット30Aが構成されている。これにより、磁石10Aは、位置決め部60によって長手方向(X方向)の位置が規制された磁石ユニット30Aとすることができる。なお、位置決め部60は、凹状部61と凸状部62を逆側に設けて互いを嵌合するようにしても良い。
位置決め部60は、例えば磁石10Aの長手方向の中央部に凹状部61が配置され、対応して磁石保持部材20Aの磁石収容部22Aの長手方向の中央部に凸状部62が配置される。また、位置決め部60は、長手方向の中央部1箇所に設ける場合に限らず、複数箇所設けても良い。この場合には、中央部付近に複数設けることで、熱膨張などの影響を端面部10bに向かって逃がすことができ好ましい。磁石保持部材20Aは、固定部21Aを備え、両端部にカラー23Aが埋設されている。
磁石ユニット30Aは、図3に示すように、磁石保持部材20Aに対して磁石10Aの位置を規制して取り付けることができるようにしたものである。磁石ユニット30Aは、磁石10Aの外側部10aと磁石保持部材20Aの磁石収容部22Aとの間に互いを嵌合して位置決めする凹状部61と凸状部62とによる位置決め部60を備える。位置決め部60は、例えば、磁石10Aに凹状部61が設けられ、この凹状部61に嵌合する凸状部62が磁石保持部材20Aに設けられて磁石ユニット30Aが構成されている。これにより、磁石10Aは、位置決め部60によって長手方向(X方向)の位置が規制された磁石ユニット30Aとすることができる。なお、位置決め部60は、凹状部61と凸状部62を逆側に設けて互いを嵌合するようにしても良い。
位置決め部60は、例えば磁石10Aの長手方向の中央部に凹状部61が配置され、対応して磁石保持部材20Aの磁石収容部22Aの長手方向の中央部に凸状部62が配置される。また、位置決め部60は、長手方向の中央部1箇所に設ける場合に限らず、複数箇所設けても良い。この場合には、中央部付近に複数設けることで、熱膨張などの影響を端面部10bに向かって逃がすことができ好ましい。磁石保持部材20Aは、固定部21Aを備え、両端部にカラー23Aが埋設されている。
磁石ユニット30Aでは、磁石10Aの中央部の凹状部61は、外側部10aの円周上に、環状にくびれた環状凹部61Aとして形成される。磁石保持部材20Aの凸状部62は、磁石収容部22Aの内周面から突き出た環状の環状凸部62Aとして形成される。これにより、磁石10Aの環状凹部61Aに磁石保持部材20Aの磁石収容部22Aの内周面から突き出た環状の環状凸部62Aが嵌合することで、磁石10Aの長手方向(X方向)の位置が規制されて位置決めされる。磁石ユニット30Aでは、位置決め部60の環状凹部61Aおよび環状凸部62Aの大きさ、すなわち幅(X方向の寸法)および深さ(Z方向の寸法)は、磁石10Aを磁石収容部22Aに、長手方向の位置を位置決めできれば良く、磁石10Aによる磁界への影響を抑え、できるだけ一様な磁界を形成できるようにすることが好ましい。また、磁石10Aの着磁後、位置決め部60の形成のための磁界の変化による検出位置への影響は、校正が行われて調整される。
このような磁石ユニット30Aは、予め磁石10Aに凹状部61または凸状部62を形成しておく。この後、磁石保持部材20Aの磁石収容部22Aに磁石10Aおよびカラー23Aがインサート成形されて固定される。すなわち、金型内に磁石10Aを配置して保持ピンなどで保持した状態で金型内に樹脂材料を流し込み、硬化させることにより磁石10Aが磁石保持部材20Aの磁石収容部22Aに位置決め部60の環状凹部61Aと環状凸部62Aによって固定される。この後、磁石10Aを着磁して磁石ユニット30Aを得る。
このような磁石ユニット30Aでは、温度変化による熱膨張差などが磁石10Aと磁石収容部22Aとの間に生じると、磁石10Aおよび磁石収容部22Aの中央部が位置決め部60で位置が規制されているので、磁石10Aの中央部から長手方向外側(X方向)の端面部10bに向かって膨張することになるが、開口部24Aによって磁石収容部22Aに応力が加わることが抑制され、クラックの発生や損傷が防止されて耐熱衝撃性に優れる。
なお、環状凹部61Aや環状凸部62Aに代え、環状の一部の凹状部61や環状の一部の凸状部62としても良い。この場合には、磁気検出手段41の磁気検出部40と対向する磁石ユニット30Aの対向面側(図示例では、+Z方向側)を凹状部61や凸状部62の形成されない一様な面とすることが好ましい。こうすることで、磁石ユニット30Aの磁石10Aによる磁界を対向面側に一様に形成することができる。また、環状の一部の凹状部61と凸状部62とすることで、円弧の両端面で凹状部61と凸状部62とが当接することで位置決めされ、長手方向(X方向)だけでなく、長手方向を中心とする軸回りの回転方向(X軸回りの回転方向)の位置決めを行うことができる。凹状部61と凸状部62の環状の一部の長さ(円弧の長さ)は、磁石10Aを磁石収容部22Aに位置決めできれば良く、任意に設定すれば良い。
次に、磁石ユニット30Bについて、図4により説明する。
磁石ユニット30Bは、磁石保持部材20Bに対して磁石10Bの位置を規制して取り付ける位置決め部60の構成が異なる。磁石ユニット30Bは、磁石10Bの外側部10aと磁石保持部材20Bの磁石収容部22Bとの間に互いを嵌合して位置決めする凹状部61と凸状部62とによる位置決め部60を備える。位置決め部60は、磁石10Bに凹状部61が設けられ、この凹状部61に嵌合する凸状部62が磁石保持部材20Bに設けられて磁石ユニット30Bが構成されている。なお、位置決め部60は、凹状部61と凸状部62を逆側に設けて互いを嵌合するようにしても良い。
位置決め部60は、例えば磁石10Bの長手方向の中央部に凹状部61が配置され、対応して磁石保持部材20Bの磁石収容部22Bの長手方向の中央部に凸状部62が配置される。磁石保持部材20Bは、固定部21Bを備え、両端部にカラー23Bが埋設されている。
磁石ユニット30Bは、磁石保持部材20Bに対して磁石10Bの位置を規制して取り付ける位置決め部60の構成が異なる。磁石ユニット30Bは、磁石10Bの外側部10aと磁石保持部材20Bの磁石収容部22Bとの間に互いを嵌合して位置決めする凹状部61と凸状部62とによる位置決め部60を備える。位置決め部60は、磁石10Bに凹状部61が設けられ、この凹状部61に嵌合する凸状部62が磁石保持部材20Bに設けられて磁石ユニット30Bが構成されている。なお、位置決め部60は、凹状部61と凸状部62を逆側に設けて互いを嵌合するようにしても良い。
位置決め部60は、例えば磁石10Bの長手方向の中央部に凹状部61が配置され、対応して磁石保持部材20Bの磁石収容部22Bの長手方向の中央部に凸状部62が配置される。磁石保持部材20Bは、固定部21Bを備え、両端部にカラー23Bが埋設されている。
磁石ユニット30Bでは、磁石10Bの中央部の凹状部61は、外側部10aの中心軸を挟む両側で平行に切り欠かれた第1平面部となるD状凹部61Bとして形成される。磁石保持部材20Bの凸状部62は、磁石収容部22Bの内周面の両側から平行に突き出た第2平面部となるD状凸部62Bとして形成される。これにより、磁石10Bの位置が外側部10aでY方向及びZ方向の位置が規制されるのに加え、磁石10Bの中心軸回り(X軸回り)の回転を規制することで、磁石10Bの中心軸回りの回転を抑えて磁石10Bの位置を高精度に検出することができる。また、磁石10BのD状凹部61Bに磁石保持部材20Bの磁石収容部22Bの内周面から突き出たD状凸部62Bが嵌合することで、磁石10Bの長手方向(X方向)の位置が規制されて位置決めされる。これに加えて、磁石ユニット30Bでは、D状凹部61BおよびD状凸部62Bの平面に沿う方向と交差する方向(例えば平面と直交する方向)の位置も規制することができる。
すなわち、D状凹部61Bの平行な第1平面部をZ方向と平行に左右に対向させて形成した場合には、磁石10Bと、磁石保持部材20Bの磁石収容部22BとのY方向の位置を規制することができる。同様に、D状凹部61BをY方向に平行に上下に対向させて形成した場合には、Z方向の位置を規制することができる。さらに、磁石10Bの中心軸回り(X軸回り)の回転を規制することができ、磁石10Bの中心軸回りの回転を抑えて磁石10Bの位置を高精度に検出することができる。
磁石ユニット30Bでは、位置決め部60のD状凹部61BおよびD状凸部62Bの大きさ、すなわち幅(X方向の寸法)および外側部10aから平面部までの深さは、磁石10Bを磁石収容部22Bに位置決めできれば良く、磁石10Bによる磁界への影響を抑え、できるだけ一様な磁界を形成できるようにすることが好ましい。また、磁石10Bの着磁後、位置決め部60の形成のための磁界の変化による検出位置への影響は、校正が行われて調整される。
すなわち、D状凹部61Bの平行な第1平面部をZ方向と平行に左右に対向させて形成した場合には、磁石10Bと、磁石保持部材20Bの磁石収容部22BとのY方向の位置を規制することができる。同様に、D状凹部61BをY方向に平行に上下に対向させて形成した場合には、Z方向の位置を規制することができる。さらに、磁石10Bの中心軸回り(X軸回り)の回転を規制することができ、磁石10Bの中心軸回りの回転を抑えて磁石10Bの位置を高精度に検出することができる。
磁石ユニット30Bでは、位置決め部60のD状凹部61BおよびD状凸部62Bの大きさ、すなわち幅(X方向の寸法)および外側部10aから平面部までの深さは、磁石10Bを磁石収容部22Bに位置決めできれば良く、磁石10Bによる磁界への影響を抑え、できるだけ一様な磁界を形成できるようにすることが好ましい。また、磁石10Bの着磁後、位置決め部60の形成のための磁界の変化による検出位置への影響は、校正が行われて調整される。
このような磁石ユニット30Bは、予め磁石10Bに凹状部61または凸状部62を形成しておく。この後、磁石保持部材20Bの磁石収容部22Bに磁石10Bおよびカラー23Bがインサート成形されて固定される。すなわち、金型内に磁石10Bを配置して保持ピンなどで保持した状態で金型内に樹脂材料を流し込み、硬化させることにより磁石10Bが磁石保持部材20Bの磁石収容部22Bに位置決め部60のD状凹部61BとD状凸部62Bによって固定される。この後、磁石10Bを着磁して磁石ユニット30Bを得る。
このような磁石ユニット30Bでは、温度変化による熱膨張差などが磁石10Bと磁石収容部22Bとの間に生じると、磁石10Bおよび磁石収容部22Bの中央部が位置決め部60で位置が規制されているので、磁石10Bの中央部から長手方向外側(X方向)の端面部10bに向かって膨張することになるが、開口部24Bによって磁石収容部22Bに応力が加わることが抑制され、クラックの発生や損傷が防止され、耐熱衝撃性に優れる。また、D状凹部61BとD状凸部62Bによる位置決め部60を設けることで、長手方向(X方向)だけでなく、長手方向を中心とする軸回りの回転方向(X軸回りの回転方向)の位置決めを行うことができる。
なお、D状凹部61BやD状凸部62Bを両側に平行に設けるのに代え、片側だけにD状凹部61BとD状凸部62Bを設けるようにしても良い。この場合には、磁気検出手段41の磁気検出部40と対向する磁石ユニット30Bの対向面側(+Z方向側)を一様な面とすることが好ましく、下面側(-Z方向側)にD状凹部61BとD状凸部62Bを形成する。こうすることで、磁石ユニット30Bの磁石10Bによる磁界を対向面側に一様に形成することができる。
次に、磁石ユニット30Cについて、図5により説明する。
磁石ユニット30Cは、磁石保持部材20Cに対して磁石10Cの位置を規制して取り付ける位置決め部60の構成が異なる。磁石ユニット30Cは、磁石10Cの外側部10aと磁石保持部材20Cの磁石収容部22Cとの間に互いを嵌合して位置決めする凹状部61と凸状部62とによる位置決め部60を備える。位置決め部60は、磁石10Cに凹状部61が設けられ、この凹状部61に嵌合する凸状部62が磁石保持部材20Cに設けられて磁石ユニット30Cが構成されている。なお、位置決め部60は、凹状部61と凸状部62を逆側に設けて互いを嵌合するようにしても良い。 位置決め部60は、例えば磁石10Cの長手方向の中央部に凹状部61が配置され、対応して磁石保持部材20Cの磁石収容部22Cの長手方向の中央部に凸状部62が配置される。磁石保持部材20Cは、固定部21Cを備え、両端部にカラー23Cが埋設されている。
磁石ユニット30Cは、磁石保持部材20Cに対して磁石10Cの位置を規制して取り付ける位置決め部60の構成が異なる。磁石ユニット30Cは、磁石10Cの外側部10aと磁石保持部材20Cの磁石収容部22Cとの間に互いを嵌合して位置決めする凹状部61と凸状部62とによる位置決め部60を備える。位置決め部60は、磁石10Cに凹状部61が設けられ、この凹状部61に嵌合する凸状部62が磁石保持部材20Cに設けられて磁石ユニット30Cが構成されている。なお、位置決め部60は、凹状部61と凸状部62を逆側に設けて互いを嵌合するようにしても良い。 位置決め部60は、例えば磁石10Cの長手方向の中央部に凹状部61が配置され、対応して磁石保持部材20Cの磁石収容部22Cの長手方向の中央部に凸状部62が配置される。磁石保持部材20Cは、固定部21Cを備え、両端部にカラー23Cが埋設されている。
磁石ユニット30Cでは、磁石10Cの中央部の凹状部61は、外側部10aから半径方向に形成されて貫通する、例えば円柱状の柱状凹部61Cとして左右方向(Y方向)に形成される。磁石保持部材20Cの凸状部62は、磁石収容部22Cの内周面から突き出た、例えば円柱状の柱状凸部62Cとして左右方向(Y方向)に形成される。これにより、磁石10Cの円柱状の貫通孔の柱状凹部61Cに磁石保持部材20Cの磁石収容部22Cの内周面から突き出た円柱状の柱状凸部62Cが嵌合することで、磁石10Cの長手方向(X方向)の位置が規制されて位置決めされる。また、磁石ユニット30Cでは、柱状凹部61Cおよび柱状凸部62Cの柱の中心軸方向以外の位置も規制することができる。例えば、柱状凹部61Cの中心軸方向と交差する方向(中心軸方向以外の方向)の位置を規制することができる。
磁石ユニット30Cでは、位置決め部60の柱状凹部61Cおよび柱状凸部62Cの大きさ、すなわち柱の直径は、磁石10Cを磁石収容部22Cに位置決めできれば良く、磁石10Cによる磁界への影響を抑え、できるだけ一様な磁界を形成できるようにすることが好ましく、磁石10Cの上面(磁気検出部40との対向面)に露出しないようにすることが好ましい。また、磁石10Cの着磁後、位置決め部60の形成のための磁界の変化による検出位置への影響は、校正を行って調整される。
磁石ユニット30Cでは、位置決め部60の柱状凹部61Cおよび柱状凸部62Cの大きさ、すなわち柱の直径は、磁石10Cを磁石収容部22Cに位置決めできれば良く、磁石10Cによる磁界への影響を抑え、できるだけ一様な磁界を形成できるようにすることが好ましく、磁石10Cの上面(磁気検出部40との対向面)に露出しないようにすることが好ましい。また、磁石10Cの着磁後、位置決め部60の形成のための磁界の変化による検出位置への影響は、校正を行って調整される。
このような磁石ユニット30Cは、予め磁石10Cに凹状部61または凸状部62を形成しておく。この後、磁石保持部材20Cの磁石収容部22Cに磁石10Cおよびカラー23Cがインサート成形されて固定される。すなわち、金型内に磁石10Cを配置して保持ピンなどで保持した状態で金型内に樹脂材料を流し込み、硬化させることにより磁石10Cが磁石保持部材20Cの磁石収容部22Cに位置決め部60の柱状凹部61Cと柱状凸部62Cによって固定される。この後、磁石10Cを着磁して磁石ユニット30Cを得る。
このような磁石ユニット30Cでは、温度変化による熱膨張差などが磁石10Cと磁石収容部22Cとの間に生じると、磁石10Cおよび磁石収容部22Cの中央部が位置決め部60で位置が規制されているので、磁石10Cの中央部から長手方向外側(X方向)の端面部10bに向かって膨張することになるが、開口部24Cによって磁石収容部22Cに応力が加わることが抑制され、クラックの発生や損傷が防止され、耐熱衝撃性に優れる。また、柱状凹部61Cと柱状凸部62Cによる位置決め部60を設けることで、長手方向(X方向)だけでなく、柱状凹部61Cおよび柱状凸部62Cの柱の中心軸方向以外の方向の位置を位置決めすることができる。
なお、柱状凹部61Cや柱状凸部62Cは、1箇所に設けるのに代え、複数箇所に設けるようにしても良い。また、柱状凹部61Cや柱状凸部62Cは、磁石10Cを貫通せずに1箇所あるいは複数箇所に設けるようにしても良い。この場合には、磁気検出手段41の磁気検出部40と対向する磁石ユニット30Cの対向面側(+Z方向側)を一様な面とすることが好ましい。こうすることで、磁石ユニット30Cの磁石10Cによる磁界を対向面側に一様に形成することができる。
次に、磁石ユニット30Dについて、図6により説明する。
磁石ユニット30Dは、磁石保持部材20Dに対して磁石10Dの位置を規制して取り付ける位置決め部60の構成が図5で説明した磁石ユニット30Cと異なる。磁石ユニット30Dは、磁石ユニット30Cと同様、磁石10Dの外側部10aと磁石保持部材20Dの磁石収容部22Dとの間に互いを嵌合して位置決めする凹状部61と凸状部62とによる位置決め部60を備える。位置決め部60は、磁石10Dに凹状部61が上下方向(Z方向)に設けられ、この凹状部61に嵌合する凸状部62が磁石保持部材20Dの上下方向(Z方向)に設けられて磁石ユニット30Dが構成されている。なお、位置決め部60は、凹状部61と凸状部62を逆側に設けて互いを嵌合するようにしても良い。
位置決め部60は、例えば磁石10Dの長手方向の中央部の上下方向に凹状部61が配置され、対応して磁石保持部材20Dの磁石収容部22Dの長手方向の中央部の上下方向に凸状部62が配置される。磁石保持部材20Dは、固定部21Dを備え、両端部にカラー23Dが埋設されている。
磁石ユニット30Dは、磁石保持部材20Dに対して磁石10Dの位置を規制して取り付ける位置決め部60の構成が図5で説明した磁石ユニット30Cと異なる。磁石ユニット30Dは、磁石ユニット30Cと同様、磁石10Dの外側部10aと磁石保持部材20Dの磁石収容部22Dとの間に互いを嵌合して位置決めする凹状部61と凸状部62とによる位置決め部60を備える。位置決め部60は、磁石10Dに凹状部61が上下方向(Z方向)に設けられ、この凹状部61に嵌合する凸状部62が磁石保持部材20Dの上下方向(Z方向)に設けられて磁石ユニット30Dが構成されている。なお、位置決め部60は、凹状部61と凸状部62を逆側に設けて互いを嵌合するようにしても良い。
位置決め部60は、例えば磁石10Dの長手方向の中央部の上下方向に凹状部61が配置され、対応して磁石保持部材20Dの磁石収容部22Dの長手方向の中央部の上下方向に凸状部62が配置される。磁石保持部材20Dは、固定部21Dを備え、両端部にカラー23Dが埋設されている。
磁石ユニット30Dでは、磁石10Dの中央部の凹状部61は、外側部10aから半径方向に形成されて貫通する、例えば円柱状の柱状凹部61Dとして上下方向に貫通して形成される。磁石保持部材20Dの凸状部62は、磁石収容部22Dの内周面から突き出た、例えば円柱状の柱状凸部62Dとして上下方向に形成される。これにより、磁石10Dの円柱状の貫通孔の柱状凹部61Dに磁石保持部材20Dの磁石収容部22Dの内周面から上下方向に突き出た円柱状の柱状凸部62Dが嵌合することで、磁石10Dの長手方向(X方向)およびこれと直交する方向(Y方向)の位置が規制されて位置決めされる。さらに、磁石ユニット30Dでは、柱状凹部61Dおよび柱状凸部62Dの柱の中心軸方向(Z方向)以外の位置も規制することができる。例えば、柱状凹部61Dの中心軸方向(Z方向)と交差する方向(中心軸方向以外の方向)の位置を規制することができる。
磁石ユニット30Dでは、位置決め部60の柱状凹部61Dおよび柱状凸部62Dの大きさ、すなわち柱の直径は、磁石10Dを磁石収容部22Dに位置決めできれば良く、磁石10Dによる磁界への影響を抑え、できるだけ一様な磁界を形成できるようにすることが好ましい。また、磁石10Dの着磁後、位置決め部60の形成のための磁界の変化による検出位置への影響は、校正を行って調整される。
磁石ユニット30Dでは、位置決め部60の柱状凹部61Dおよび柱状凸部62Dの大きさ、すなわち柱の直径は、磁石10Dを磁石収容部22Dに位置決めできれば良く、磁石10Dによる磁界への影響を抑え、できるだけ一様な磁界を形成できるようにすることが好ましい。また、磁石10Dの着磁後、位置決め部60の形成のための磁界の変化による検出位置への影響は、校正を行って調整される。
このような磁石ユニット30Dは、予め磁石10Dに凹状部61または凸状部62を形成しておく。この後、磁石保持部材20Dの磁石収容部22Dに磁石10Dおよびカラー23Dがインサート成形されて固定される。すなわち、金型内に磁石10Dを配置して保持ピンなどで保持した状態で金型内に樹脂材料を流し込み、硬化させることにより磁石10Dが磁石保持部材20Dの磁石収容部22Dに位置決め部60の柱状凹部61Dと柱状凸部62Dによって固定される。この後、磁石10Dを着磁して磁石ユニット30Dを得る。
このような磁石ユニット30Dでは、温度変化による熱膨張差などが磁石10Dと磁石収容部22Dとの間に生じると、磁石10Dおよび磁石収容部22Dの中央部が位置決め部60で位置が規制されているので、磁石10Dの中央部から長手方向外側(X方向)の端面部10bに向かって膨張することになるが、開口部24Dによって磁石収容部22Dに応力が加わることが抑制され、クラックの発生や損傷が防止され、耐熱衝撃性に優れる。また、柱状凹部61Dと柱状凸部62Dによる位置決め部60を設けることで、長手方向(X方向)およびこれと直交する方向(Y方向)だけでなく、柱状凹部61Cおよび柱状凸部62Cの柱の中心軸方向(上下方向)以外の方向の位置を位置決めすることができる。
なお、柱状凹部61Dや柱状凸部62Dは、1箇所に設けるのに代え、複数箇所に設けるようにしても良い。また、柱状凹部61Dや柱状凸部62Dは、磁石10Dを貫通せずに1箇所あるいは複数箇所に設けるようにしても良い。この場合には、磁気検出手段41の磁気検出部40と対向する磁石ユニット30Dの対向面側(+Z方向側)を一様な面とすることが好ましい。こうすることで、磁石ユニット30Dの磁石10Dによる磁界を対向面側に一様に形成することができる。
なお、上記の各実施形態では、磁石10,10A~10Dを円柱形状とした場合を例に説明したが、これに限らず、直方体状であっても良く、長手方向をX方向として磁石保持部材20,20A~20Dに取り付けるようにする。また、着磁方向も長手方向(X方向)に沿って並ぶようにする場合に限らず、上下方向(Z方向)に沿って着磁するようにしても良い。
開口部24,24A~24Dの形状も矩形の貫通した孔とする場合に限らず、磁石ユニット30,30A~30Dが使用される温度環境での熱膨張差などに対応し、端面部10bが磁石収容部22,22A~22Dと接触せずに応力が加わらない隙間を形成できる形状であれば良い。
また、上記実施形態では、被検出体Lが直線移動する場合を例に説明したが、被検出体Lが中心軸回りに回転移動する場合の位置検出にも適用することができ、磁石10,10A~10Dの回転移動に伴う磁界の変化を検知し、位置を検出するようにしても良い。この場合には、磁気検出手段41の磁気検出部40と対向する磁石ユニット30、30A~30Dの対向面側(+Z方向側)を一様な面とすることが好ましく、円柱状の磁石や上面側が、対向面側に凸状の曲面を備えた磁石とすることが好ましい。
さらに、被検出体Lの直線移動と回転移動の一方だけでなく、直線及び回転の両方の移動を検知する場合にも適用することができる。
さらに、被検出体Lの直線移動と回転移動の一方だけでなく、直線及び回転の両方の移動を検知する場合にも適用することができる。
次に、位置検出装置1の実施形態について図面を参照して説明する。
本発明の位置検出装置1は、磁石ユニット30を備え、磁石ユニット30と対向する磁気検出素子(磁気検出手段)41を有する磁気検出部40と、磁気検出部40を収容するケース50と、を備えて構成される。
位置検出装置1は、既に説明した磁石ユニット30(30A~30D)を備え、磁石10(10A~10D)の相対移動による磁界の変化を、磁気検出素子(磁気検出手段)41を有する磁気検出部40で検知して位置を検出する。
なお、以下の説明では、磁石ユニット30を用いる場合を例に説明する。
本発明の位置検出装置1は、磁石ユニット30を備え、磁石ユニット30と対向する磁気検出素子(磁気検出手段)41を有する磁気検出部40と、磁気検出部40を収容するケース50と、を備えて構成される。
位置検出装置1は、既に説明した磁石ユニット30(30A~30D)を備え、磁石10(10A~10D)の相対移動による磁界の変化を、磁気検出素子(磁気検出手段)41を有する磁気検出部40で検知して位置を検出する。
なお、以下の説明では、磁石ユニット30を用いる場合を例に説明する。
位置検出装置1では、図1および図7に示すように、例えば、磁石ユニット30が被検出体Lの切り欠き部Laに固定されて直線移動され、磁石ユニット30に対して機器などにケース50を固定しておき、磁石ユニット30の磁石10の相対移動に伴う磁界の変化を、磁気検出部40の磁気検出素子41で検知し、位置を検出する。
磁気検出部40は、磁気検出素子41と、電子部品(図示しない)が回路基板42上に実装されて電気的に接続される。磁気検出素子41は、被検出体Lの移動に伴う磁界の変化を感知するホールICなどで構成される。電子部品は、磁気検出素子41の出力信号を処理するICチップや保護回路を構成するコンデンサなどの部品で構成される。
磁気検出素子41と電子部品は、回路基板42の-Z方向の表面の略中央部に取り付けられている。
回路基板42は、図示しない配線パターンが形成されて磁気検出素子41や電子部品を電気的に接続する。配線パターンは、電子部品を接続するとともに、例えば電源用の2本の配線および磁気検出部40からの信号取り出し用の2本の配線を備えて4本の配線で構成される。回路基板42は、ケース50を構成する本体ケース51内に収容される(図1参照)。
回路基板42の配線パターンには、図示しないリード端子が接続され、リード端子がケース50を構成する本体ケース51と一体に形成されるコネクタケース52内にインサート成形されて配置され、外部接続用の接続端子を構成する。
磁気検出素子41と電子部品は、回路基板42の-Z方向の表面の略中央部に取り付けられている。
回路基板42は、図示しない配線パターンが形成されて磁気検出素子41や電子部品を電気的に接続する。配線パターンは、電子部品を接続するとともに、例えば電源用の2本の配線および磁気検出部40からの信号取り出し用の2本の配線を備えて4本の配線で構成される。回路基板42は、ケース50を構成する本体ケース51内に収容される(図1参照)。
回路基板42の配線パターンには、図示しないリード端子が接続され、リード端子がケース50を構成する本体ケース51と一体に形成されるコネクタケース52内にインサート成形されて配置され、外部接続用の接続端子を構成する。
ケース50は、回路基板42を収容する本体ケース51と、リード端子を収容するコネクタケース52とを備えて構成され、本体ケース51とコネクタケース52とが一体とされて1つのケース50を構成している。
ケース50は、図1に示すように、例えばPPS(Poly Phenylene Sulfide)樹脂など合成樹脂製とされてY方向に長い略ひし形状の本体ケース51の-X方向の端部に中空の略楕円柱状のコネクタケース52が段差を有して一体に設けられて略L字状に形成されている。
ケース50は、図1に示すように、例えばPPS(Poly Phenylene Sulfide)樹脂など合成樹脂製とされてY方向に長い略ひし形状の本体ケース51の-X方向の端部に中空の略楕円柱状のコネクタケース52が段差を有して一体に設けられて略L字状に形成されている。
本体ケース51の両端部(±Y方向の端部)には、磁気検出部40を、相対移動する被検出体Lに対して固定するための固定用のボルト挿通孔53が形成され、金属製のカラー54がインサート成形されて補強してある。
本体ケース51は、被検出体Lの切り欠き部Laに固定されて直線移動される磁石ユニット30に対向して機器などにカラー54に挿通したボルトで固定される。
本体ケース51は、被検出体Lの切り欠き部Laに固定されて直線移動される磁石ユニット30に対向して機器などにカラー54に挿通したボルトで固定される。
コネクタケース52は、中空内部に4本のリード端子が突き出すように収容され、図示しないコネクタを接続することで、外部からの電源の供給と出力信号の取り出しとができるようにしてある。
位置検出装置1では、例えば被検出体Lであるシャフトを跨いで機器に、両端部のカラー54を介して位置検出装置1のケース50を固定し、被検出体Lに取り付けた磁石ユニット30の磁石10と対向するように磁気検出部40を設置する。
これにより、被検出体Lの磁石10の相対移動を磁気検出部40の磁気検出素子41で検知し、コネクタケース52に接続したコネクタで出力信号を外部に取り出すことで、位置を検出する。
これにより、被検出体Lの磁石10の相対移動を磁気検出部40の磁気検出素子41で検知し、コネクタケース52に接続したコネクタで出力信号を外部に取り出すことで、位置を検出する。
なお、磁石ユニット30の場合と同様に、上記実施形態では、被検出体Lが直線移動する場合を例に説明したが、被検出体Lが中心軸回りに回転移動する場合の位置検出にも適用することができ、磁石10,10A~10Dの回転移動に伴う磁界の変化を検知し、位置を検出するようにしても良い。この場合には、磁気検出手段41の磁気検出部40と対向する磁石ユニット30,30A~30Dの対向面側(+Z方向側)を一様な面とすることが好ましく、円柱状の磁石や上面側が対向面側に凸状の曲面を備えた磁石とすることが好ましい。
さらに、被検出体Lの直線移動と回転移動の一方だけでなく、直線および回転の両方の移動を検知する場合にも適用することができ、この場合には、回路基板42に直線方向の磁界の変化を検知する磁気検出素子41に加え、回転方向の磁界の変化を検知する磁気検出素子(図示しない)を設けるようにする。回転方向の磁界の変化を検知する磁気検出素子は、磁気検出素子41と同一のICパッケージ内に備えることもできる。
さらに、被検出体Lの直線移動と回転移動の一方だけでなく、直線および回転の両方の移動を検知する場合にも適用することができ、この場合には、回路基板42に直線方向の磁界の変化を検知する磁気検出素子41に加え、回転方向の磁界の変化を検知する磁気検出素子(図示しない)を設けるようにする。回転方向の磁界の変化を検知する磁気検出素子は、磁気検出素子41と同一のICパッケージ内に備えることもできる。
このような位置検出装置1によれば、磁界の変化を検出する磁気検出素子(磁気検出手段)41に対して直線移動または回転移動する磁石10と、被検出体Lに固定されて直線移動または回転移動し、磁石10が取り付けられる磁石保持部材20と、を備える磁石ユニット30と、磁石ユニット30と対向する磁気検出素子41を有する磁気検出部40と、磁気検出部40が収容されるケース50と、を備えているので、被検出体Lの直線移動や回転移動にともなう磁界の変化を磁気検出素子41で検知し、直線移動に伴う位置や回転移動に伴う位置を検出することができる。また、位置検出装置1が温度変化の大きい環境で使用されても、磁石ユニット30によって磁石10と磁石保持部材20との熱膨張差による応力が磁石保持部材20に作用することが防止され、これによりクラックなどの損傷が生じるおそれがなく、耐熱衝撃性に優れ、精度良く位置を検出することができる。
以上、実施形態とともに、具体的に説明したように、磁石ユニット30は、磁界の変化を検出する磁気検出素子(磁気検出手段)41に対して直線移動または回転移動する磁石10と、被検出体Lに固定されて直線移動または回転移動し、磁石10が取り付けられる磁石保持部材20と、を備える磁石ユニット30であって、磁石保持部材20は、被検出体Lに固定される固定部21と、磁石10が取り付けられる磁石収容部22と、を備え、磁石収容部22は、磁石10の長手方向の両端面部10bが露出される開口部24が形成されている。
かかる構成によれば、磁石10の両端面部10bが開口部24によって露出した状態で磁石保持部材20の磁石収容部22に取り付けられているので、磁石10と磁石保持部材20との間に熱膨張差が生じても応力が磁石保持部材20に作用せず、クラックなどの損傷の発生を抑え、耐熱衝撃性に優れた磁石ユニット30とすることができる。また、磁石保持部材20の所定の位置に磁石10が取り付けられることで、精度良く位置を検出することができる。
かかる構成によれば、磁石10の両端面部10bが開口部24によって露出した状態で磁石保持部材20の磁石収容部22に取り付けられているので、磁石10と磁石保持部材20との間に熱膨張差が生じても応力が磁石保持部材20に作用せず、クラックなどの損傷の発生を抑え、耐熱衝撃性に優れた磁石ユニット30とすることができる。また、磁石保持部材20の所定の位置に磁石10が取り付けられることで、精度良く位置を検出することができる。
磁石ユニット30では、磁石保持部材20は、磁石10の外側部10aと磁石収容部22との間に互いを嵌合して位置決めする凹状部61と凸状部62とによる位置決め部60を備えている。
かかる構成によれば、磁石10の両端面部10bが開口部24によって露出した状態で磁石保持部材20の磁石収容部22に取り付けられても位置決め部60の凹状部61と凸状部62とを互いに嵌合することで少なくとも長手方向の位置決めをすることができ、耐熱衝撃性を確保すると同時に、磁石保持部材20の所定の位置に磁石10が取り付けられることで、精度良く位置を検出することができる。
かかる構成によれば、磁石10の両端面部10bが開口部24によって露出した状態で磁石保持部材20の磁石収容部22に取り付けられても位置決め部60の凹状部61と凸状部62とを互いに嵌合することで少なくとも長手方向の位置決めをすることができ、耐熱衝撃性を確保すると同時に、磁石保持部材20の所定の位置に磁石10が取り付けられることで、精度良く位置を検出することができる。
磁石ユニット30では、位置決め部60は、磁石10と磁石収容部22の長手方向中央部に形成してある。
かかる構成によれば、磁石10が位置決め部60で位置決めされた中央部を基点に両端面部10bに向かって熱膨張差による伸縮が生じるので、熱膨張による影響を半分などに抑えることができ、一層確実に耐熱衝撃性を確保すると同時に、精度良く位置を検出することができる。
かかる構成によれば、磁石10が位置決め部60で位置決めされた中央部を基点に両端面部10bに向かって熱膨張差による伸縮が生じるので、熱膨張による影響を半分などに抑えることができ、一層確実に耐熱衝撃性を確保すると同時に、精度良く位置を検出することができる。
磁石ユニット30Aでは、位置決め部60は、環状の少なくとも一部の環状凹部(凹状部)61Aと環状の少なくとも一部の環状凹部61Aに嵌合する環状の少なくとも一部の環状凸部(凸状部)62Aとで構成されている。
かかる構成によれば、環状凹部(凹状部)61Aと環状凹部61Aに嵌合する環状凸部(凸状部)62Aとで位置決めすることで、磁石ユニット30Aの磁石10Aと磁石保持部材20Aとを確実に位置決めすることができ、耐熱衝撃性を確保すると同時に、位置決めされた磁石10Aで精度良く位置を検出することができる。また、環状凹部(凹状部)61Aと環状凹部61Aに嵌合する環状凸部(凸状部)62Aとを環状とせず、環状の一部で構成するようにすれば、磁石10Aと磁石保持部材20Aの間の回転軸回りの位置決めを行うことができ、一層精度良く位置決めすることができる。
かかる構成によれば、環状凹部(凹状部)61Aと環状凹部61Aに嵌合する環状凸部(凸状部)62Aとで位置決めすることで、磁石ユニット30Aの磁石10Aと磁石保持部材20Aとを確実に位置決めすることができ、耐熱衝撃性を確保すると同時に、位置決めされた磁石10Aで精度良く位置を検出することができる。また、環状凹部(凹状部)61Aと環状凹部61Aに嵌合する環状凸部(凸状部)62Aとを環状とせず、環状の一部で構成するようにすれば、磁石10Aと磁石保持部材20Aの間の回転軸回りの位置決めを行うことができ、一層精度良く位置決めすることができる。
磁石ユニット30Bでは、位置決め部60は、磁石10Bの外側部10aと磁石収容部22Bとの長手方向を挟む少なくとも一方側に形成されるD状凹部(第1平面部を備える凹状部)61BとD状凸部(第1平面部と当接する第2平面部を備える凸状部)62Bとで構成されている。
かかる構成によれば、磁石ユニット30Bの磁石10Bと磁石保持部材20Bとを確実に位置決めすることができ、耐熱衝撃性を確保すると同時に、位置決めされた磁石10Bで精度良く位置を検出することができる。また、D状凹部61BとD状凸部62Bによって磁石10Bと磁石保持部材20Bの間の回転軸回りの位置決めを行うことができ、一層精度良く位置決めすることができる。
かかる構成によれば、磁石ユニット30Bの磁石10Bと磁石保持部材20Bとを確実に位置決めすることができ、耐熱衝撃性を確保すると同時に、位置決めされた磁石10Bで精度良く位置を検出することができる。また、D状凹部61BとD状凸部62Bによって磁石10Bと磁石保持部材20Bの間の回転軸回りの位置決めを行うことができ、一層精度良く位置決めすることができる。
磁石ユニット30Cでは、位置決め部60は、柱状凹部(柱状の凹状部)61Cと柱状凹部61Cに嵌合する柱状凸部(柱状の凸状部)62Cとで構成されている。
かかる構成によれば、磁石ユニット30Cの磁石10Cと磁石保持部材20Cとを確実に位置決めすることができ、耐熱衝撃性を確保すると同時に、位置決めされた磁石10Cで精度良く位置を検出することができる。また、柱状凹部61Cと柱状凸部62Cによって磁石10Cと磁石保持部材20Cの間の回転軸回りの位置決めを行うことができ、一層精度良く位置決めすることができる。位置決め部60の凹状部61と凸状部62とを磁石10Cの表面に位置させないようにすれば、磁石10Cの表面の磁界を一様に形成することができる。
また、柱状凹部61Cを磁石10Cに貫通するよう形成し、これに柱状凸部62Cを埋めるようにして嵌合することで、磁石ユニット30Cの磁石10Cと磁石保持部材20Cとを確実に樹脂を充填して位置決めすることができる。
これにより、耐熱衝撃性を確保すると同時に、位置決めされた磁石10Cで精度良く位置を検出することができる。
かかる構成によれば、磁石ユニット30Cの磁石10Cと磁石保持部材20Cとを確実に位置決めすることができ、耐熱衝撃性を確保すると同時に、位置決めされた磁石10Cで精度良く位置を検出することができる。また、柱状凹部61Cと柱状凸部62Cによって磁石10Cと磁石保持部材20Cの間の回転軸回りの位置決めを行うことができ、一層精度良く位置決めすることができる。位置決め部60の凹状部61と凸状部62とを磁石10Cの表面に位置させないようにすれば、磁石10Cの表面の磁界を一様に形成することができる。
また、柱状凹部61Cを磁石10Cに貫通するよう形成し、これに柱状凸部62Cを埋めるようにして嵌合することで、磁石ユニット30Cの磁石10Cと磁石保持部材20Cとを確実に樹脂を充填して位置決めすることができる。
これにより、耐熱衝撃性を確保すると同時に、位置決めされた磁石10Cで精度良く位置を検出することができる。
磁石ユニット30Dでは、位置決め部60は、上下方向の柱状凹部(柱状の凹状部)61Dと柱状凹部61Dに嵌合する上下方向の柱状凸部(柱状の凸状部)62Dとで構成されている。
かかる構成によれば、磁石ユニット30Dの磁石10Dと磁石保持部材20Dとを確実に位置決めすることができ、耐熱衝撃性を確保すると同時に、位置決めされた磁石10Dで精度良く位置を検出することができる。また、柱状凹部61Dと柱状凸部62Dによって磁石10Dと磁石保持部材20Dの間の回転軸回りの位置決めを行うことができ、一層精度良く位置決めすることができる。位置決め部60の凹状部61と凸状部62とを磁石10Dの表面に位置させないようにすれば、磁石10Dの表面の磁界を一様に形成することができる。
また、柱状凹部61Dを磁石10Dに上下方向に貫通するよう形成し、これに柱状凸部62Dを埋めるようにして嵌合することで、磁石ユニット30Dの磁石10Dと磁石保持部材20Dとを確実に樹脂を充填して位置決めすることができる。
これにより、耐熱衝撃性を確保すると同時に、位置決めされた磁石10Dで精度良く位置を検出することができる。
かかる構成によれば、磁石ユニット30Dの磁石10Dと磁石保持部材20Dとを確実に位置決めすることができ、耐熱衝撃性を確保すると同時に、位置決めされた磁石10Dで精度良く位置を検出することができる。また、柱状凹部61Dと柱状凸部62Dによって磁石10Dと磁石保持部材20Dの間の回転軸回りの位置決めを行うことができ、一層精度良く位置決めすることができる。位置決め部60の凹状部61と凸状部62とを磁石10Dの表面に位置させないようにすれば、磁石10Dの表面の磁界を一様に形成することができる。
また、柱状凹部61Dを磁石10Dに上下方向に貫通するよう形成し、これに柱状凸部62Dを埋めるようにして嵌合することで、磁石ユニット30Dの磁石10Dと磁石保持部材20Dとを確実に樹脂を充填して位置決めすることができる。
これにより、耐熱衝撃性を確保すると同時に、位置決めされた磁石10Dで精度良く位置を検出することができる。
位置検出装置1は、磁界の変化を検出する磁気検出素子(磁気検出手段)41に対して直線移動または回転移動する磁石10と、被検出体Lに固定されて直線移動または回転移動し、磁石10が取り付けられる磁石保持部材20と、を備える磁石ユニット30と、磁石ユニット30と対向する磁気検出素子41を有する磁気検出部40と、磁気検出部40が収容されるケース50と、を備えている。
かかる構成によれば、被検出体Lの直線移動や回転移動にともなう磁界の変化を磁気検出素子41で検知し、直線移動に伴う位置や回転移動に伴う位置を検出することができる。また、位置検出装置1が温度変化の大きい環境で使用されても、磁石ユニット30によって磁石10と磁石保持部材20との熱膨張差による応力が磁石保持部材20に作用することが防止され、クラックなどの損傷が生じるおそれがなく耐熱衝撃性に優れ、精度良く位置を検出することができる。
かかる構成によれば、被検出体Lの直線移動や回転移動にともなう磁界の変化を磁気検出素子41で検知し、直線移動に伴う位置や回転移動に伴う位置を検出することができる。また、位置検出装置1が温度変化の大きい環境で使用されても、磁石ユニット30によって磁石10と磁石保持部材20との熱膨張差による応力が磁石保持部材20に作用することが防止され、クラックなどの損傷が生じるおそれがなく耐熱衝撃性に優れ、精度良く位置を検出することができる。
なお、上記の実施形態では、被検出体Lとして自動変速機のシフトレバーの位置の検出を行う場合を例に説明したが、これに限らず、直線移動や回転移動する被検出体Lの位置検出に適用することができる。
また、本発明は、各実施形態で説明した構成を単独あるいは組み合わせて構成することができるものである。
また、本発明は、上記実施形態に限定するものではない。例えば、磁石、磁石保持部材、ケースなどの材料は、上記の記載に限定するものでなく、同一機能を有するものに変えることもできる。磁気検出素子もホールICに限らず他の素子を用いることもできる。
また、本発明は、各実施形態で説明した構成を単独あるいは組み合わせて構成することができるものである。
また、本発明は、上記実施形態に限定するものではない。例えば、磁石、磁石保持部材、ケースなどの材料は、上記の記載に限定するものでなく、同一機能を有するものに変えることもできる。磁気検出素子もホールICに限らず他の素子を用いることもできる。
1 位置検出装置
10 磁石
10A 磁石
10B 磁石
10C 磁石
10D 磁石
10a 外側部
10b 端面部
20 磁石保持部材
20A 磁石保持部材
20B 磁石保持部材
20C 磁石保持部材
20D 磁石保持部材
21 固定部
21A 固定部
21B 固定部
21C 固定部
21D 固定部
21a 底面部
22 磁石収容部
22A 磁石収容部
22B 磁石収容部
22C 磁石収容部
22D 磁石収容部
23 カラー
23A カラー
23B カラー
23C カラー
23D カラー
24 開口部
24A 開口部
24B 開口部
24C 開口部
24D 開口部
30 磁石ユニット
30A 磁石ユニット
30B 磁石ユニット
30C 磁石ユニット
30D 磁石ユニット
40 磁気検出部
41 磁気検出素子(磁気検出手段)
42 回路基板
50 ケース
51 本体ケース
52 コネクタケース
53 ボルト挿通孔
54 カラー
60 位置決め部
61 凹状部
61A 環状凹部
61B D状凹部
61C 柱状凹部
61D 柱状凹部
62 凸状部
62A 環状凸部
62B D状凸部
62C 柱状凸部
62D 柱状凸部
L 被検出体
La 切り欠き部
10 磁石
10A 磁石
10B 磁石
10C 磁石
10D 磁石
10a 外側部
10b 端面部
20 磁石保持部材
20A 磁石保持部材
20B 磁石保持部材
20C 磁石保持部材
20D 磁石保持部材
21 固定部
21A 固定部
21B 固定部
21C 固定部
21D 固定部
21a 底面部
22 磁石収容部
22A 磁石収容部
22B 磁石収容部
22C 磁石収容部
22D 磁石収容部
23 カラー
23A カラー
23B カラー
23C カラー
23D カラー
24 開口部
24A 開口部
24B 開口部
24C 開口部
24D 開口部
30 磁石ユニット
30A 磁石ユニット
30B 磁石ユニット
30C 磁石ユニット
30D 磁石ユニット
40 磁気検出部
41 磁気検出素子(磁気検出手段)
42 回路基板
50 ケース
51 本体ケース
52 コネクタケース
53 ボルト挿通孔
54 カラー
60 位置決め部
61 凹状部
61A 環状凹部
61B D状凹部
61C 柱状凹部
61D 柱状凹部
62 凸状部
62A 環状凸部
62B D状凸部
62C 柱状凸部
62D 柱状凸部
L 被検出体
La 切り欠き部
Claims (8)
- 磁界の変化を検出する磁気検出手段に対して直線移動または回転移動する磁石と、
被検出体に固定されて直線移動または回転移動し、前記磁石が取り付けられる磁石保持部材と、を備える磁石ユニットであって、
前記磁石保持部材は、
前記被検出体に固定される固定部と、
前記磁石が取り付けられる磁石収容部と、を備え、
前記磁石収容部は、前記磁石の両端面部が露出される開口部が形成される、
ことを特徴とする磁石ユニット。 - 前記磁石保持部材は、前記磁石の外側部と前記磁石収容部との間に互いを嵌合して位置決めする凹状部と凸状部とによる位置決め部を備える、
ことを特徴とする請求項1に記載の磁石ユニット。 - 前記位置決め部は、前記磁石と前記磁石収容部の長手方向中央部に形成される、
ことを特徴とする請求項2に記載の磁石ユニット。 - 前記位置決め部は、環状の少なくとも一部の前記凹状部と環状の少なくとも一部の前記凹状部に嵌合する環状の少なくとも一部の前記凸状部とで構成される、
ことを特徴とする請求項2または3に記載の磁石ユニット。 - 前記位置決め部は、前記磁石の外側部と前記磁石収容部との長手方向を挟む少なくとも一方側に形成される第1平面部を備える前記凹状部と前記第1平面部と当接する第2平面部を備える前記凸状部とで構成される、
ことを特徴とする請求項2または3に記載の磁石ユニット。 - 前記位置決め部は、柱状の前記凹状部と柱状の前記凹状部に嵌合する柱状の前記凸状部とで構成される、
ことを特徴とする請求項2または3に記載の磁石ユニット。 - 前記位置決め部は、貫通する前記柱状の前記凹状部および貫通する前記柱状の前記凸状部で構成される、
ことを特徴とする請求項6に記載の磁石ユニット。 - 磁界の変化を検出する磁気検出手段に対して直線移動または回転移動する磁石と、
被検出体に固定されて直線移動または回転移動し、前記磁石が取り付けられる磁石保持部材と、を備える請求項1乃至7のいずれかに記載の磁石ユニットと、
前記磁石ユニットと対向する前記磁気検出手段を有する磁気検出部と、
前記磁気検出部が収容されるケースと、を備える、
ことを特徴とする位置検出装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021519422A JP7468514B2 (ja) | 2019-05-13 | 2020-05-11 | 磁石ユニット及び位置検出装置 |
| US17/607,327 US11971253B2 (en) | 2019-05-13 | 2020-05-11 | Magnet unit and position detection device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019-090960 | 2019-05-13 | ||
| JP2019090960 | 2019-05-13 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020230752A1 true WO2020230752A1 (ja) | 2020-11-19 |
Family
ID=73289416
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/018796 WO2020230752A1 (ja) | 2019-05-13 | 2020-05-11 | 磁石ユニット及び位置検出装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11971253B2 (ja) |
| JP (1) | JP7468514B2 (ja) |
| WO (1) | WO2020230752A1 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62193563U (ja) * | 1986-05-30 | 1987-12-09 | ||
| US20070209438A1 (en) * | 2006-03-06 | 2007-09-13 | Bernard Branchereau | Shaft Encoder, Device Comprising Such An Encoder And Method Of Manufacturing Such An Encoder |
| JP2010210287A (ja) * | 2009-03-06 | 2010-09-24 | Nikon Corp | エンコーダ |
| JP2018046660A (ja) * | 2016-09-14 | 2018-03-22 | アスモ株式会社 | モータユニット |
| JP2018119920A (ja) * | 2017-01-27 | 2018-08-02 | アイシン精機株式会社 | センサ用磁石ユニット |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017026528A (ja) | 2015-07-24 | 2017-02-02 | 日本精機株式会社 | 回転角度検出装置 |
-
2020
- 2020-05-11 WO PCT/JP2020/018796 patent/WO2020230752A1/ja active Application Filing
- 2020-05-11 US US17/607,327 patent/US11971253B2/en active Active
- 2020-05-11 JP JP2021519422A patent/JP7468514B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62193563U (ja) * | 1986-05-30 | 1987-12-09 | ||
| US20070209438A1 (en) * | 2006-03-06 | 2007-09-13 | Bernard Branchereau | Shaft Encoder, Device Comprising Such An Encoder And Method Of Manufacturing Such An Encoder |
| JP2010210287A (ja) * | 2009-03-06 | 2010-09-24 | Nikon Corp | エンコーダ |
| JP2018046660A (ja) * | 2016-09-14 | 2018-03-22 | アスモ株式会社 | モータユニット |
| JP2018119920A (ja) * | 2017-01-27 | 2018-08-02 | アイシン精機株式会社 | センサ用磁石ユニット |
Also Published As
| Publication number | Publication date |
|---|---|
| US11971253B2 (en) | 2024-04-30 |
| JP7468514B2 (ja) | 2024-04-16 |
| US20220205772A1 (en) | 2022-06-30 |
| JPWO2020230752A1 (ja) | 2020-11-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5401902B2 (ja) | モータ | |
| CN106451927B (zh) | 传感器组件以及包含该传感器组件的电机 | |
| US8461829B2 (en) | Magnetic angle sensor unit having ferromagnetic conductive shielding | |
| EP1600780A1 (en) | Rotational sensor | |
| JP2017173035A (ja) | 磁石構造体及び回転角度検出器 | |
| EP1813925B1 (en) | Torque Detection Device | |
| JP7370872B2 (ja) | 角度測定機構のための走査ユニット | |
| EP2485013B1 (en) | Rotation angle detecting device | |
| WO2020230752A1 (ja) | 磁石ユニット及び位置検出装置 | |
| EP1367359A1 (en) | Rotation detecting apparatus and method of fabricating the same | |
| JP3958115B2 (ja) | 回転検出装置 | |
| US11131593B2 (en) | Sensor device | |
| TW201813205A (zh) | 具有編碼功能的電連接器 | |
| US6836111B2 (en) | Sensor assembly with a universal sensor module for sensing angular position of an object | |
| JP6188076B2 (ja) | 磁石保持ユニット及び磁気式回転角度検出装置 | |
| JP7419075B2 (ja) | 角度測定機構のための走査ユニット | |
| CN108474668B (zh) | 位置检测装置 | |
| JP6282010B2 (ja) | 位置検出装置 | |
| JP6965709B2 (ja) | 電動アクチュエータ | |
| US11536594B2 (en) | Sensor component, pre-assembly arrangement for a sensor component, and method for producing a sensor component | |
| JP7106051B2 (ja) | 回転検出装置及び回転検出装置の製造方法 | |
| KR101833301B1 (ko) | 회전체 속도 측정용 센서조립체 및 그 제조방법 | |
| KR100881773B1 (ko) | 전자부품의 유지구조체 | |
| JP2005049095A (ja) | 磁気センサ | |
| WO2019082577A1 (ja) | 磁石ユニット及び回転角度検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20805614 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2021519422 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 20805614 Country of ref document: EP Kind code of ref document: A1 |