WO2019194103A1 - 飛行機の突風応答軽減システム、乱気流検知システム、動揺推定システム、ドップラーライダー及び飛行機の突風応答軽減方法 - Google Patents
飛行機の突風応答軽減システム、乱気流検知システム、動揺推定システム、ドップラーライダー及び飛行機の突風応答軽減方法 Download PDFInfo
- Publication number
- WO2019194103A1 WO2019194103A1 PCT/JP2019/014210 JP2019014210W WO2019194103A1 WO 2019194103 A1 WO2019194103 A1 WO 2019194103A1 JP 2019014210 W JP2019014210 W JP 2019014210W WO 2019194103 A1 WO2019194103 A1 WO 2019194103A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- aircraft
- airplane
- lift
- turbulence
- wind speed
- Prior art date
Links
- 230000004044 response Effects 0.000 title claims description 40
- 238000000034 method Methods 0.000 title claims description 24
- 230000009467 reduction Effects 0.000 title claims description 24
- 230000008859 change Effects 0.000 claims abstract description 71
- 238000005259 measurement Methods 0.000 claims abstract description 49
- 230000003287 optical effect Effects 0.000 claims description 50
- 230000000116 mitigating effect Effects 0.000 claims description 27
- 230000001133 acceleration Effects 0.000 claims description 25
- 238000004364 calculation method Methods 0.000 claims description 19
- 238000001228 spectrum Methods 0.000 claims description 11
- 230000003068 static effect Effects 0.000 claims description 9
- 238000001514 detection method Methods 0.000 claims description 6
- 238000012545 processing Methods 0.000 claims description 4
- 230000005484 gravity Effects 0.000 claims 1
- 239000013598 vector Substances 0.000 abstract description 15
- 230000033001 locomotion Effects 0.000 description 15
- 230000007423 decrease Effects 0.000 description 13
- 238000010586 diagram Methods 0.000 description 10
- 230000007246 mechanism Effects 0.000 description 10
- 230000000694 effects Effects 0.000 description 8
- 230000005540 biological transmission Effects 0.000 description 7
- 238000012360 testing method Methods 0.000 description 6
- 230000002159 abnormal effect Effects 0.000 description 4
- 230000005489 elastic deformation Effects 0.000 description 4
- 239000013307 optical fiber Substances 0.000 description 4
- 239000000443 aerosol Substances 0.000 description 3
- 238000013461 design Methods 0.000 description 3
- 230000006872 improvement Effects 0.000 description 3
- 206010000369 Accident Diseases 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000007774 longterm Effects 0.000 description 2
- 238000000691 measurement method Methods 0.000 description 2
- 239000002245 particle Substances 0.000 description 2
- 230000005855 radiation Effects 0.000 description 2
- 230000002441 reversible effect Effects 0.000 description 2
- 238000004088 simulation Methods 0.000 description 2
- 238000000342 Monte Carlo simulation Methods 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000002950 deficient Effects 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 238000005192 partition Methods 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 230000002195 synergetic effect Effects 0.000 description 1
- 239000013585 weight reducing agent Substances 0.000 description 1
Images


















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C9/00—Adjustable control surfaces or members, e.g. rudders
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C13/00—Control systems or transmitting systems for actuating flying-control surfaces, lift-increasing flaps, air brakes, or spoilers
- B64C13/02—Initiating means
- B64C13/16—Initiating means actuated automatically, e.g. responsive to gust detectors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D45/00—Aircraft indicators or protectors not otherwise provided for
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P5/00—Measuring speed of fluids, e.g. of air stream; Measuring speed of bodies relative to fluids, e.g. of ship, of aircraft
- G01P5/26—Measuring speed of fluids, e.g. of air stream; Measuring speed of bodies relative to fluids, e.g. of ship, of aircraft by measuring the direct influence of the streaming fluid on the properties of a detecting optical wave
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/10—Simultaneous control of position or course in three dimensions
- G05D1/101—Simultaneous control of position or course in three dimensions specially adapted for aircraft
- G05D1/106—Change initiated in response to external conditions, e.g. avoidance of elevated terrain or of no-fly zones
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/10—Systems for measuring distance only using transmission of interrupted, pulse modulated waves
- G01S13/18—Systems for measuring distance only using transmission of interrupted, pulse modulated waves wherein range gates are used
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/52—Discriminating between fixed and moving objects or between objects moving at different speeds
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/95—Radar or analogous systems specially adapted for specific applications for meteorological use
- G01S13/953—Radar or analogous systems specially adapted for specific applications for meteorological use mounted on aircraft
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/50—Systems of measurement based on relative movement of target
- G01S17/58—Velocity or trajectory determination systems; Sense-of-movement determination systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/87—Combinations of systems using electromagnetic waves other than radio waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/95—Lidar systems specially adapted for specific applications for meteorological use
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4817—Constructional features, e.g. arrangements of optical elements relating to scanning
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01W—METEOROLOGY
- G01W1/00—Meteorology
- G01W2001/003—Clear air turbulence detection or forecasting, e.g. for aircrafts
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T50/00—Aeronautics or air transport
- Y02T50/30—Wing lift efficiency
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T50/00—Aeronautics or air transport
- Y02T50/40—Weight reduction
Definitions
- the present invention relates to a gust response mitigation system and method used to reduce vertical motion of an airframe when an airplane flies in turbulence, for example, a turbulence detection system suitable for use in these techniques, and sway estimation. System and Doppler rider.
- Turbulence is particularly important as a major cause of passenger aircraft accidents, and technology relating to Doppler lidar using laser light has been researched and developed as a device for detecting turbulence in advance by being mounted on an aircraft (for example, see Non-Patent Document 1). reference.).
- Patent Document 3 a remote airflow measurement device, a remote airflow measurement method, and a remote airflow measurement method that can improve the estimation accuracy of a two-dimensional airflow vector including a vertical airflow vector and can further widen the airflow estimation range. advocated the program.
- the measurement accuracy of the optical axis in the line-of-sight direction is 0.2 to 0.3 m / s based on the results of Monte Carlo simulation.
- the estimation accuracy is 0.6 to 0.9 m / s when the scissor angle is 20 degrees.
- this is only a geometric estimation calculation, and in reality, there is a possibility that the error will increase due to the influence of a complicated local flow.
- the present invention solves the above-mentioned problems, and its purpose is to provide a technique for reducing the fluctuation of the airframe when an airplane enters a turbulent air flow without using prior information of air flow vectors of two or more dimensions. There is to do.
- an airplane gust response mitigation system radiates electromagnetic waves toward a flight direction of an airplane, receives scattered waves in the atmosphere, and radiates the emitted electromagnetic waves. Based on the Doppler shift amount of the frequency between the scattered electromagnetic wave and the scattered electromagnetic wave, the measurement unit for measuring the remote wind speed in the radial axis direction, the rudder for controlling the lift of the aircraft, and the measurement result in the measurement unit, And a control calculation unit that calculates an angle of attack with a small lift inclination and a rudder angle for controlling the lift so that the lift does not change.
- An aircraft gust response mitigation method radiates an electromagnetic wave toward a flight direction of an airplane, receives a scattered wave in the atmosphere, and between the radiated electromagnetic wave and the scattered electromagnetic wave.
- the remote wind speed in the radial axis direction is measured based on the amount of Doppler shift of the frequency, and when it is found that the airplane receives a gust wind based on the measurement result, the angle of attack with a small lift inclination is calculated and the lift force
- the rudder angle of the aircraft that controls the lift force so that does not change is calculated.
- a turbulence detection system radiates an electromagnetic wave toward a flight direction of an airplane, receives a scattered wave in the atmosphere, and has a frequency between the radiated electromagnetic wave and the scattered electromagnetic wave.
- a measurement unit that measures the remote wind speed in the radial axis direction based on the Doppler shift amount, and a control calculation unit that calculates an intensity index of turbulence in the planned flight direction of the airplane based on the measurement result of the measurement unit,
- the control calculation unit uses the product of the amount of change in the wind speed in the radial axis direction of the radiated electromagnetic wave, the flight speed, and the air density or static pressure as the turbulence intensity index.
- the control calculation unit obtains the wind speed width in the range bin from the amount of increase in the power spectrum width of the scattering in the range bin as the amount of change in the wind speed in the radial axis direction, and expresses the intensity of the turbulence numerically by the wind speed width. Good.
- the motion estimation system radiates electromagnetic waves in the planned flight direction of an airplane, receives scattered waves in the atmosphere, and has a frequency between the radiated electromagnetic waves and the scattered electromagnetic waves.
- a control unit that measures a remote wind speed in the radial axis direction based on a Doppler shift amount; and a control calculation unit that calculates an index of the degree to which the airplane shakes based on a measurement result of the measurement unit, the control calculation unit Uses the value of the maximum acceleration that continues for a certain period of time as an indicator of the degree to which the airplane shakes, by removing the high and low components of the shaking frequency.
- a Doppler lidar emits a light wave toward a flight direction of an airplane, receives a scattered wave in the atmosphere, and has a frequency Doppler between the emitted light wave and the scattered light wave.
- a measurement unit that measures the remote wind speed in the radial direction based on the shift amount, and a scanner that changes the direction of the light wave and has a condensing function of an optical telescope.
- FIG. 1 is a block diagram showing a configuration of a Doppler lidar gust response mitigation system mounted on an airplane according to an embodiment of the present invention. It is explanatory drawing which shows the method of expanding the measurement range of the wind speed which concerns on one Embodiment of this invention. It is explanatory drawing which shows the effect of the method of calculating the approximate value of the true air speed which concerns on one Embodiment of this invention.
- the aircraft gust response mitigation system radiates electromagnetic waves toward the flight direction of the aircraft, receives scattered waves in the atmosphere, and has a frequency between the emitted electromagnetic waves and the scattered electromagnetic waves. Based on the Doppler shift amount, the measurement unit that measures the remote wind speed in the radial axis direction, the rudder that controls the lift of the aircraft, and the measurement result of the measurement unit, when it is found that the aircraft receives a gust of wind And a control calculation unit that calculates an angle of attack with a small lift inclination and calculates an angle of a rudder that controls the lift so that the lift does not change.
- FIG. 1 shows a case where a gust of wind is encountered during flight.
- the relative wind vector of the gust to the airplane 200 is W
- its vertical component is W Z
- its front and rear components are W X
- the angle of attack ⁇ ′ when encountering a gust can be obtained by the following equation.
- ⁇ ′ ⁇ + tan ⁇ 1 (W Z / (V + W Z )) (2)
- Equation 2 can be simplified as the following equation.
- ⁇ ′ ⁇ + W Z / V (3) Therefore, when the lift change due to the gust changing the angle of attack is ⁇ L, it can be obtained by the following equation.
- ⁇ L ⁇ VW Z S (4) That is, it can be said that the lift change ⁇ L caused by the change in the angle of attack caused by the gust of wind is substantially proportional to the product of the air density ⁇ , the flight speed V, and the vertical component W Z of the gust of wind.
- ⁇ L ⁇ C L S (VW X + (1/2) W X 2 ) (6)
- the turbulent airflow is considered to be isotropic, it can be said that the vertical fluctuation of the airplane due to the turbulent airflow is substantially proportional to the product of the air density ⁇ , the flight speed V, and the gust W. Therefore, it is appropriate to use these products ⁇ VW as the turbulence intensity index. Although there is some variation in isotropy, it is generally considered that there is a correlation.
- As a method for expressing the product of the flight speed V and the gust W there is an Fh factor (Patent Document 4).
- the gust W the wind speed dispersion value indicated by the spectrum width of the received light in the observation region is used. Also good.
- the air density [rho, proportional to the static pressure P S measured by the static pressure hole for determining the pressure altitude, the strength index of the turbulence may use P S VW.
- Static pressure P S or air density ⁇ and flight speed V is measured by the Pitot-static tube which has been installed on all aircraft.
- the flight speed V and the front gust W can be measured by, for example, a Doppler rider. Therefore, in the gust response mitigation system of the present invention, for example, laser light is emitted (transmitted) into the atmosphere as a transmission signal, laser scattered light from the aerosol in the atmosphere of the laser light is received as a reception signal, and the transmission is performed.
- a Doppler rider that measures the wind speed of the airflow in the remote area based on the Doppler shift amount of the frequency between the signal and the received signal, the gust of wind ahead is observed, and the fluctuation of the airframe is reduced by the automatic control of the rudder .
- FIG. 2 is a conceptual diagram showing a general airfoil lift curve, in which point S is referred to as a stall point, area A is referred to as a front side, and area B is referred to as a back side.
- point S is referred to as a stall point
- area A is referred to as a front side
- area B is referred to as a back side.
- the region A when the pilot pulls the control stick, the posture is turned upward, and the lift is increased in a short time, so that the aircraft is raised. This is a natural behavior for human senses.
- the flying speed decreases and the lift decreases, and the aircraft descends.
- the present invention describes the reduction of shaking, only a short-time motion is considered.
- the engine output may be adjusted by normal operation.
- the control stick In the region B, contrary to the region A, if the control stick is pulled, the lift decreases and the aircraft descends, so special attention is required when maneuvering. Usually, the control stick is pushed to return to the area A. It is not necessarily a dangerous area, and may be actively used in power drift machines.
- the lift coefficient changes little with respect to the angle of attack, and even if the vertical wind changes, the lift does not change so much that the vertical movement of the aircraft is suppressed.
- the angle of attack is increased in order to shift to the point S when flying in the A region, the aircraft will rise, so it is necessary to appropriately control the lift force in order to maintain level flight. is there.
- a flaperone that changes the left and right ailerons in phase may be used, or both may be used in combination.
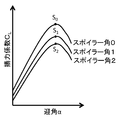
- FIG. 3 schematically shows how the lift coefficient changes depending on the change in the spoiler angle.
- the lift coefficient decreases and the lift change near the S point decreases.
- the aircraft because lift is increased when increasing the angle of attack attempts to fly at S 0 point rises.
- the lift coefficient is to deploy the spoiler to be two points S, actually increases the drag with an increase in angle of attack, and reduced lift for the flying speed is reduced flight Altitude decreases.
- the aircraft normally flies at the most efficient angle of attack with the highest lift-drag ratio, so if the angle of attack is changed, horizontal flight may not be possible with the same thrust. Approaches gradually S 0 point with S 1 point of time, eventually if spoiler angle comes to drop even becomes 0, it is necessary to increase the thrust before the spoiler angle is zero.
- the thrust increasing operation may be automatic or manual. It is usually included in the autopilot function.
- the change in lift due to the change in the front and rear winds will offset the change in lift by changing the spoiler angle according to the measurement value of the front and rear winds in front of the aircraft. Since it is quasi-static control for changes in vertical wind and dynamic control for changes in front and rear winds, it is possible to achieve both.
- the control that cancels the change in the lift due to the front and rear winds is typically directly controlled by a spoiler installed on the main wing that generates the lift, and thus is less susceptible to the elastic deformation of the airframe. This is an advantage greatly different from the lift control by the control of the elevator.
- the range of wind speed that can be observed is limited. For this reason, when mounted on an airplane and used, a method of subtracting the flight speed and measuring the change from the subtracted speed is taken.
- the average value of the immediately preceding observation value is regarded as the flight speed.
- the observation value may include an abnormal value, and thus the average value may be inconvenient. I understood.
- the mode (mode) of the immediately preceding observation value is regarded as the flight speed.
- the flight speed In order to calculate the mode, it is necessary to divide the observation value in a finite wind speed range and generate a histogram, so the resolution of the flight speed measurement value depends on the division width of the wind speed. However, the flight speed may be approximate because it is only necessary to be within the wind speed observable range.
- the vertical attitude angle of the aircraft generally changes. Since the change in the vertical attitude angle causes vertical acceleration depending on the position of the airplane in the cabin, the aircraft gust response mitigation system according to one aspect of the present invention moves up and down to reduce the vertical angular acceleration. A function of controlling the rudder may be added.
- the aircraft gust response mitigation system adds a control function for preventing an accident by making a turn flight and superimposing the acceleration due to the centrifugal force on the gravitational acceleration when entering the turbulence. Also good.
- the aircraft gust response mitigation system has a control function that automatically interrupts the altitude change when a front turbulence layer is detected during altitude change in order to prevent entry into the turbulence layer. It may be added.
- the Doppler lidar used in the present invention can observe very weak air currents, but observation errors cannot be avoided. For this reason, there is a possibility of outputting a signal as if there is a slight change in air flow when there is no turbulent air flow, in which case the airframe may be vibrated. Furthermore, since the flight speed is lowered in the control according to the present invention, the operation efficiency is lowered during the operation of the control. Therefore, there is a need for a criterion that the lift control is not performed when the intensity of the observed turbulence is low, and the lift control is performed when the intensity is above a certain threshold. In the aircraft gust response reduction system according to an embodiment of the present invention, the above-described ⁇ VW or P S VW is used as the turbulence intensity index.
- the strength of turbulence can be defined by the above indicators, but the degree of airplane sway varies depending on the aerodynamic characteristics and inertial force of each aircraft. Therefore, in order to determine the danger, it is necessary to define the degree to which the airplane shakes.
- the components of the high frequency fluctuation and the low frequency fluctuation which are less likely to be related to the turbulence accident are excluded, and the value of the maximum acceleration continuous for a certain period of time is excluded. Used as an indicator of the degree of shaking.
- the correspondence between the turbulence intensity index on individual airplanes and the turbulence degree index may be clarified by flight simulation or flight test. That is, the intensity index of the turbulence at the time of the level fluctuation that does not require control or the level that requires emergency response may be examined and reflected in the control law.
- the scanner that changes the direction of the light wave has the light condensing function of the optical telescope, which makes it smaller and lighter.
- the scanner may be a convex prism type or a concave mirror type.
- the present invention even when a monocular rider is used, when the airplane encounters turbulence, it is possible to reduce the up and down motion of the aircraft, and it can be expected to improve the safety and comfort of the airplane.
- Non-Patent Document 3 Airworthiness Examination Guidelines Part III 7-2-6B shown in Non-Patent Document 3 defines the maximum speed for entering turbulent airflow.
- Currently when flying in an airspace where turbulent airflow may occur, although there is a case where it is necessary to decelerate, according to the present invention, it is only necessary to decelerate when turbulence is detected, so that it is possible to expect improvement in operational efficiency and punctuality.
- FIG. 4 is a block diagram showing a configuration of a gust response mitigation system mounted on an airplane according to an embodiment of the present invention.
- the control command generation unit 100 of the airplane gust response reduction system includes a measurement unit 10 and a control calculation unit 30.
- the scanner 300 is a component for changing the radiation direction of laser light, but is not a component essential for the implementation of the present invention. This is because the angle of attack and side slip angle of an airplane during cruising do not change greatly, and the application of the present invention is limited only to dealing with turbulent airflow in the short distance, the observation area does not change significantly. It is.
- the measurement unit 10 radiates laser light into the atmosphere in the form of pulses, receives the reflected light, and based on the Doppler shift amount of the frequency between the emitted laser light and reflected light, the optical axis direction (radiation axis direction)
- the optical telescope 11, the optical transceiver 12, and the signal processing unit 13 are included.
- the optical telescope 11 radiates laser light (transmitted light) generated by the optical transceiver 12 toward the atmosphere.
- the emitted laser light is scattered by minute aerosol particles floating in the atmosphere.
- the scattered light is received by the optical transceiver 12 via the optical telescope 11.
- the optical transceiver 12 generates laser light having a single wavelength, for example, 1.5 ⁇ m, receives scattered light in the atmosphere, and electrically calculates the frequency difference between the emitted laser light and the scattered light. Convert to signal.
- the signal processing unit 13 time-divides the frequency difference signal to calculate the wind speed for each distance. That is, the received light (scattered light) received through the optical telescope 11 is compared with the transmitted light, and the wind speed is obtained from the change in frequency caused by the Doppler effect.
- the amount of frequency change due to the Doppler effect is typically used to measure wind speed. In general, this is called a Doppler rider, and a rider (LIDAR) is a remote observation technique using light, which is an abbreviation of “Light Detection And Ranging”.
- the maximum observation distance is about 1 to 30 km, and this value varies depending on atmospheric conditions. For ordinary passenger aircraft, this distance corresponds to a flight distance of 4 to 150 seconds.
- the approximate value of the true airspeed is used as an offset as shown in FIG.
- the Doppler shift amount of the frequency is F OFST + F d .
- the measurable range of the wind speed with the prototype device is ⁇ 40 m / s.
- the average value of the immediately preceding observation values is regarded as the true air speed.
- the observation value may include an abnormal value, FIG. As shown in the figure, it was found that the average value may have a large error.
- the mode (mode) of the observed value 1 to 3 seconds before is regarded as the true airspeed.
- the mode (mode) may be calculated only for an observation range with high reliability such as an SN ratio of the received signal of, for example, 7 dB or more.
- the mode In order to calculate the mode (mode), it is necessary to divide the observed values in a finite wind speed range and generate a histogram, so the resolution of the true airspeed measurement value depends on the division width of the wind speed become. Since the wind speed division width is suitably 2 to 5 m / s, the resolution is also the numerical value. However, since it is only necessary to enter the wind speed observable range, the true airspeed may be an approximate value with low resolution.
- abnormal values exceeding 1 ⁇ are excluded from the histogram of the latest observed values based on the standard deviation, and normal observations are performed. If an average value of only values is obtained, a true airspeed with high reliability and accuracy can be obtained. If static pressure information is used, it is possible to convert the true airspeed into an equivalent airspeed.
- control calculation unit 30 determines the steering angle of the elevator 231 so that the angle of attack of the lift 231 is small when it is found that the airplane 200 receives a gust of wind. A command is transmitted to the autopilot 210. The steering angle changes slowly, and the angle of attack is fed back to set the target angle of attack. In addition, a steering angle command of the spoiler 221 that does not change the lift is transmitted to the autopilot 210.
- the angle of attack with the smallest lift inclination is the angle of attack at which the lift coefficient becomes the maximum value, and the angle of attack can be obtained by a wind tunnel test as shown in Non-Patent Document 2, for example.
- the lift coefficient 3-10 seconds before encountering turbulence is operated automatically and slowly the elevator 231 toward the angle of attack of maximum value, aircraft temporarily And the flight speed decreases.
- the lift rate is fed back and the rudder angle of the spoiler 221 is appropriately increased, the lift and weight are balanced and the lift rate becomes zero.
- the flying speed further decreases with time and the lift decreases.
- the lift rate remains zero.
- the spoiler 221 may descend even if the rudder angle of the spoiler 221 becomes zero, but before that, the thrust is increased to maintain the horizontal flight.
- the vehicle may descend if it is in a situation that allows the vehicle to descend.
- the rudder that controls the lift may be a flaperon instead of a spoiler. Alternatively, it may be a dedicated rudder for reducing shaking or a flap that operates at high speed. A plurality of rudders may be used in combination.
- the steering angle is controlled based on the output of the acceleration sensor that is usually attached to the aircraft.
- the acceleration sensor that is usually attached to the aircraft.
- a rudder angle command is transmitted to the rudder actuator, but there is a delay until the rudder aerodynamic force is changed.
- the rudder can be controlled in advance in consideration of the delay, so the influence of the average delay does not occur, and the remote airflow observation error and Only slight effects such as rudder angle error remain. Therefore, since it can cope with fine shaking with high frequency, not only the reduction of accidents but also improvement of riding comfort can be expected.
- the vertical moment coefficient Cm may slightly change. Consequently pitching occurs, it will cause to produce vertical acceleration proportional to the angular acceleration in accordance with the position of the room of the airplane, the change amount C m [delta] SP of C m corresponding to the pre-spoiler angle, wind tunnel test It is better to change the elevator according to the spoiler angle.
- the characteristics of the C m change amount C m ⁇ SP according to the spoiler angle and the C m change amount C m ⁇ EL according to the elevator angle as shown in FIG. 9 are obtained in advance.
- As spoiler angles at a certain time is [delta] SP1
- a command of changing the spoiler angle [delta] SP2 amount was issued for the control according to the present invention
- C m changes by [delta] Cm the moment In order to cancel out
- the elevator angle at that time is ⁇ EL1
- a command for making the elevator angle to ⁇ EL2 for generating a reverse moment is issued simultaneously. Since the elevator angle control for changing the angle of attack according to the present invention is a quasi-static control and the elevator angle control for canceling the vertical moment is a dynamic control, both can be achieved.
- C m ⁇ SP may be obtained by a flight test.
- a conventional function of controlling the elevator by feeding back the signal of the angular acceleration sensor may be used.
- control calculation unit 30 may transmit a turning command to the autopilot 210 when turbulence ahead is detected. For example, when turning in a 30-degree bank that is permitted for normal passenger aircraft operation, the vertical acceleration increases by about 15%, so that the possibility of lifting personnel and articles can be reduced.
- the left and right turning directions may be determined, and turning flight may be performed to avoid the turbulence in a weak direction.
- the control calculation unit 30 may transmit a command to cancel the altitude change to the autopilot 210.
- the turbulence region is often distributed in a layered manner in the altitude direction, and when this is detected in advance by a Doppler rider, it is possible to avoid entering the turbulent layer if the altitude change is stopped. . The same is true whether it is rising or falling.
- the above-described ⁇ VW or P S VW is used as a turbulence intensity index.
- P S is easy to use because it is static pressure to use the barometric altimeter.
- W the wind speed change amount W.
- VW can be obtained by using the Fh-factor shown in “Method of detecting turbulence” in Patent Document 4.
- the Fh-factor calculates the difference between the two measurement values, so if one or both of the two measurement values are defective in measurement, an incorrect numerical value is calculated.
- the “remote turbulence detection method and apparatus for carrying it out” in Patent Document 7 uses the spectrum width of the received signal.
- an error occurs in the estimation of the wind speed width because the spectrum width of the transmission signal is not zero.
- the optical axis direction wind speed change amount W is obtained by subtracting the power spectrum width of the transmitted light from the power spectrum width of the scattered light received by the optical transceiver 12, that is, by scattering. It is assumed that the increase amount of the power spectrum width is proportional to the change amount of the wind speed in the optical axis direction. Therefore, the optical axis direction wind speed variation W (standard deviation of the wind speed in the range bin) is given by the following.
- W ⁇ (fdr ⁇ fdt) 2 (9)
- ⁇ is the wavelength of the laser light
- fdr is the power spectrum width of the received light
- fdt is the power spectrum width of the transmitted light. Since W is the standard deviation of the wind speed, it is proportional to the amount of change in wind speed.
- P s VW V may be a true airspeed value according to the present invention, or may be obtained from an airspeedometer normally mounted on an airplane.
- W is an airflow change that is less than the observation accuracy (for example, 0.22 m / s or less), there is a possibility that the control surface will vibrate in reverse, so it is more appropriate not to implement the control even if the airflow change is observed. It is. Alternatively, the control gain may be changed according to the observed airflow change amount.
- the strength of turbulence can be defined by the above indicators, but the degree of airplane sway varies depending on the aerodynamic characteristics and inertial force of each aircraft. Therefore, an indicator is also required to the extent that the airplane is shaken.
- a component having a high frequency of less than 2 Hz and a component having a low frequency of 0.1 Hz or less is excluded as a high frequency that is less likely to be related to a turbulence accident.
- the value of the maximum acceleration a that lasts for 0.3 seconds is used as an index of the degree of fluctuation of the airplane.
- the maximum acceleration a may be expressed in a logarithm.
- the correspondence between the turbulence intensity index on individual airplanes and the turbulence degree index may be clarified by flight simulation or flight test. That is, a correlation coefficient between the turbulence intensity index and the actually generated acceleration may be obtained to determine a threshold value that matches the human sense.
- a correlation coefficient between the turbulence intensity index and the actually generated acceleration may be obtained to determine a threshold value that matches the human sense.
- the aircraft motion index is calculated from the turbulence intensity index and the aircraft specifications (S5) (S6). If the aircraft motion index is less than the preset threshold, emergency avoidance such as turning or stopping altitude change is assumed as no urgency. Do not implement control. Aircraft specifications include airframe weight, flight speed, and aerodynamic data. If it is equal to or greater than the threshold, emergency avoidance control is performed (S7). If the altitude is being changed, an altitude change stop command is issued, and if the altitude is not being changed, a turn command is issued to the autopilot. Even when turbulence cannot be avoided in practice, the fluctuation reduction control according to the present invention and the superimposition of vertical acceleration by turning effectively act, and the accident can be reduced. Pilot judgment may be involved in emergency avoidance.
- the Doppler lidar receives extremely weak scattered light, the larger the aperture of the optical telescope 11, the better the performance.
- the prototype optical antenna 40 weighs about 50 kg
- the prism type scanner 301 for changing the direction of the optical axis weighs about 45 kg. It was. These were arranged at the front and back as shown in FIG. The left side of the figure is the nose direction.
- the chamber 242 is for pressurizing the optical antenna 40 in the same manner as in the apparatus, and light is emitted through the chamber window 243.
- the scanner 301 has double prisms that can be rotated by an electric motor, and can freely change the direction of light.
- the fairing window 241 is a window attached to the front surface of the fairing 240 that houses these devices.
- a large optical telescope having a diameter of 150 mm is disposed on the optical antenna, high rigidity is required, and it is difficult to reduce the weight structurally.
- the lens used for the optical telescope 11 requires extremely high optical characteristics, it cannot be reduced in weight by a Fresnel lens or the like.
- FIG. 14A shows a conventional configuration.
- the objective lens of the optical telescope 11 is omitted, and the prism of the scanner 302 is made convex so that the function of the objective lens is also used.
- the objective lens becomes unnecessary, not only the weight of the objective lens but also the structure supporting the objective lens becomes unnecessary, and the optical antenna casing itself can be reduced in size, so that the weight can be reduced.
- a fairing window 303 may be used as a convex lens so as to serve as an objective lens, and the small concave lens 304 may be moved to change the direction of the laser beam. At this time, a mechanism is adopted in which the optical axis of the laser is always directed toward the center of the fairing window 303.
- the fairing window 303 has a thickness of 2 cm or more because strength is required, and it is easy to make a convex lens.
- the fairing window 303 is located outside the scanner 300 so that the laser beam is not lost. There is no need to increase the size of the fairing window 303. The weight reduction effect of eliminating the need for the scanner 300 is also great.
- FIG. 3 An example of a specific mechanism for moving the small concave lens 304 is shown in FIG.
- the angle-of-attack changing support 311 is attached to the frame of the convex fairing window 303 so that the optical axis 310 always faces the center of the convex fairing window 303 even if the optical axis 310 changes in the elevation angle direction.
- the azimuth change can be realized by rotating the azimuth change support tool 312, and the optical transmission / reception unit 314 with the small concave lens 304 attached to the tip is fixed to the azimuth change support tool 312.
- the optical axis 310 always faces the center of the convex fairing window 303 because it moves laterally along the slit 311S.
- the optical fiber cable 315 is used for transmitting transmission / reception light, it is not suitable for high output light, but the structure becomes simple, and the optical transmission / reception unit is a non-pressurized part such as a radome outside the pressure partition 250 It becomes possible to arrange in. As a result, the chamber 242 and the chamber window 243 are not required (see FIG. 13).
- the output light diffused at the exit of the optical fiber cable 315 is first converted into parallel rays by a convex lens. Therefore, in order to diffuse the output light according to the aperture of the convex fairing window 303, the 304 becomes a concave lens.
- the convex lens and 304 may be integrated to form a convex lens.
- a concave mirror 305 can be used instead of an objective lens as shown in FIG. In order to change the optical axis, the concave mirror 305 may be rotated.
- the concave mirror 305 shown in FIG. 17 When the concave mirror 305 shown in FIG. 17 is rotated to change the direction of the laser beam, there is a need for a fairing dimension, so that the overhang outside the apparatus increases, and air resistance and aerodynamic noise may increase. . Therefore, the elevation (elevation angle) of the laser beam is changed by moving the small convex mirror 306 back and forth and rotating the small convex mirror 306 so that the optical axis faces the center of the concave mirror 305 as shown in FIG. It is good also as a mechanism to do. In order to change the azimuth (azimuth) of the laser beam, the concave mirror 305 may be configured to rotate in the azimuth direction.
- FIG. 19 shows an example of a specific mechanism for rotating the small convex mirror 306 simultaneously with the back-and-forth movement using the rack gear 307 and the reduction gear 308.
- the rack gear 307 is fixed to the airframe, and when the support 309 of the reduction gear 308 is moved back and forth, the small convex mirror 306 rotates.
- the gear ratio of the reduction gear 308 is appropriately set, it is possible to design the optical axis 310 so as to always face the center of the concave mirror 305. At this time, if fine adjustment of the angle change amount of the small convex mirror 306 is necessary, an elliptical gear may be used as the reduction gear 308.
- FIG. 20 shows an example of a specific mechanism for rotating the small convex mirror 306 simultaneously with the back and forth movement using a link mechanism.
- the gust response mitigation system of the present invention can be suitably applied as a means for reducing airframe fluctuation when an airplane encounters turbulence.
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Multimedia (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Abstract
【課題】2次元以上の気流ベクトルの事前情報を用いずに、飛行機が乱気流に突入した際の機体の動揺を低減させる技術を提供すること。 【解決手段】このシステムは、飛行機の飛行予定方向に向けて電磁波を放射し、その大気中での散乱波を受信し、前記放射した電磁波と散乱した電磁波との間の周波数のドップラーシフト量に基づき、放射軸方向の遠隔風速を計測する計測部10と、飛行機の揚力を制御するスポイラー221と、計測部10での計測結果に基づき、飛行機が突風を受けることが判明した場合に、揚力傾斜が少ない迎角を算出するとともに、揚力が変化しないような揚力を制御するスポイラー221の角度を算出する制御演算部30とを有する。
Description
本発明は、例えば飛行機が乱気流中を飛行したときに、機体の上下動揺を低減することに用いられる突風応答軽減システム及び方法、さらにこれらの技術に用いられるのに適した乱気流検知システム、動揺推定システム及びドップラーライダーに関する。
旅客機事故の主要因として乱気流は特に重要であり、航空機に搭載して乱気流を事前に検知する装置として、レーザ光を利用したドップラーライダーに関する技術が研究開発されている(例えば、非特許文献1を参照。)。
ドップラーライダーを航空機の乱気流事故防止用として使用するには、飛行方向前方の乱気流情報をパイロットに伝達し、パイロットが回避飛行やシートベルトサイン点灯などにより対処する方法の他、気流情報を搭載コンピューターに伝達して、自動的に舵を制御することにより乱気流突入時の機体の動揺を低減する方法等がある(例えば、特許文献1を参照。)。
上記の舵を制御するためには、一般的に鉛直気流ベクトルを求める必要がある。本発明者らは、特許文献2において2組のドップラーライダー(遠隔気流計測装置)による観測値を幾何学的に変換して鉛直気流ベクトルを求める技術を提唱した。
さらに本発明者らは、特許文献3において、鉛直気流ベクトルを含む二次元気流ベクトルの推定精度を向上させ、しかも気流推定範囲をより広範囲とすることができる遠隔気流計測装置、遠隔気流計測方法及びプログラムを提唱した。
ただし、動揺低減制御の事前情報として気流ベクトルを利用して舵を自動制御する方式の場合、遠隔気流計測装置による観測方向が2組以上必要なこと、事前情報に極めて高い信頼性が要求されること、機体の弾性変形を考慮する必要があることから、実用化の障害となっていた。
H.Inokuchi, H.Tanaka, and T.Ando, "Development of an Onboard Doppler LIDAR for Flight Safety," Journal of Aircraft,Vo1.46, No.4, PP.1411-1415, AIAA, July-August, 2009.
Ira H. Abbott, Albert E. Von Doenhoff, "Theory of Wing Sections," Dover Publications, Inc.
国土交通省航空局航空機安全課監修、耐空性審査要領、鳳文書林出版
まず、飛行機が乱気流に突入したときに機体が動揺する原理を概説する。動揺は上下左右前後に運動するものであるが、ここでは事故に発展する可能性が高い上下運動のみに注目して説明する。上下運動に関係する気流方向は、主に鉛直風および飛行機の進行方向に対する前後風である。
鉛直風が変化すると、飛行機の前進速度との合成により飛行機に対する相対的な気流ベクトルが変化する。すなわち迎角が変化することにより揚力が変化するため、機体が上下に動揺する。前後風の変化があった場合は、動圧の変化をもたらすため、同じく揚力が変化して、機体が上下に動揺する。以上のふたつの現象は、乱気流中では同時に生ずるものであるが、原理的には分離して考えることができる。一般的には前後風よりも鉛直風の影響の方が大きいとされている。
ドップラーライダーを用いた突風の鉛直および前後の気流推定には、2軸以上の光軸が必要である。前方上下2方向の観測の場合、レーザ光が気流を推定する点に照射されている場合にのみ厳密な二次元気流ベクトルを与えるが、航空機前方ではレーザ光軸間の距離が広がるため、幾何学的な変換の仮定が崩れ、正しく気流推定を実施することが困難となる。この影響を少なくするために上下2方向のはさみ角を小さくすると、ベクトルの変換誤差が大きくなるというジレンマがある。これまでに試作したドップラーライダーの場合、光軸の視線方向の計測精度は、モンテカルロシミュレーションの結果から、0.2~0.3m/sである。これを鉛直方向の気流ベクトルに変換すると、はさみ角が20度の場合で、0.6~0.9m/sの推定精度となる。しかも、これはあくまでも幾何学的な推定計算であって、現実には複雑な局所流れの影響で誤差が大きくなる可能性がある。
2次元以上の気流ベクトルの事前情報に応じて、昇降舵を自動制御する方式の場合、誤った事前情報は、機体を加振する可能性があるため事前情報に極めて高い精度と信頼性が要求されること、操舵により機体が変形するために弾性変形を考慮する必要があることから、実用化の障害となっていた。
本発明は、上記の問題点を解決するものであり、その目的は、2次元以上の気流ベクトルの事前情報を用いずに、飛行機が乱気流に突入した際の機体の動揺を低減させる技術を提供することにある。
上記目的を達成するため、本発明の一形態に係る飛行機の突風応答軽減システムは、飛行機の飛行予定方向に向けて電磁波を放射し、その大気中での散乱波を受信し、前記放射した電磁波と散乱した電磁波との間の周波数のドップラーシフト量に基づき、放射軸方向の遠隔風速を計測する計測部と、飛行機の揚力を制御する舵と、前記計測部での計測結果に基づき、該飛行機が突風を受けることが判明した場合に、揚力傾斜が少ない迎角を算出するとともに、揚力が変化しないような前記揚力を制御する舵の角度を算出する制御演算部とを具備する。
本発明の一形態に係る飛行機の突風応答軽減方法は、飛行機の飛行予定方向に向けて電磁波を放射し、その大気中での散乱波を受信し、前記放射した電磁波と散乱した電磁波との間の周波数のドップラーシフト量に基づき、放射軸方向の遠隔風速を計測し、前記計測結果に基づき、前記飛行機が突風を受けることが判明した場合に、揚力傾斜が少ない迎角を算出するとともに、揚力が変化しないような前記揚力を制御する前記航空機の舵の角度を算出する。
本発明の一形態に係る乱気流検知システムは、飛行機の飛行予定方向に向けて電磁波を放射し、その大気中での散乱波を受信し、前記放射した電磁波と散乱した電磁波との間の周波数のドップラーシフト量に基づき、放射軸方向の遠隔風速を計測する計測部と、前記計測部の計測結果に基づき前記飛行機の飛行予定方向の乱気流の強度指標を算出する制御演算部とを有し、前記制御演算部は、前記乱気流の強度指標として、放射する電磁波の放射軸方向の風速変化量および飛行速度ならびに空気密度または静圧の積を用いる。
前記制御演算部は、前記放射軸方向の風速変化量として、レンジビン内における散乱のパワースペクトル幅の増加量から該レンジビン内の風速幅を求め、該風速幅により乱気流の強度を数値で表してもよい。
前記制御演算部は、前記放射軸方向の風速変化量として、レンジビン内における散乱のパワースペクトル幅の増加量から該レンジビン内の風速幅を求め、該風速幅により乱気流の強度を数値で表してもよい。
本発明の一形態に係る動揺推定システムは、飛行機の飛行予定方向に向けて電磁波を放射し、その大気中での散乱波を受信し、前記放射した電磁波と散乱した電磁波との間の周波数のドップラーシフト量に基づき、放射軸方向の遠隔風速を計測する計測部と、前記計測部の計測結果に基づき前記飛行機が動揺する程度の指標を算出する制御演算部とを有し、前記制御演算部は、前記飛行機が動揺する程度の指標として、揺れの周波数の高い成分と低い成分を取り除き、一定時間連続する最大加速度の値を用いる。
本発明の一形態に係るドップラーライダーは、飛行機の飛行予定方向に向けて光波を放射し、その大気中での散乱波を受信し、前記放射した光波と散乱した光波との間の周波数のドップラーシフト量に基づき、放射軸方向の遠隔風速を計測する計測部と、前記光波の方向を変更し、かつ、光学望遠鏡の集光機能を有するスキャナーとを具備する。
本発明によれば、2次元以上の気流ベクトルの事前情報を用いずに、飛行機が乱気流に突入した際の機体の動揺を低減させることができる。
本技術に係る飛行機の突風応答軽減システムは、飛行機の飛行予定方向に向けて電磁波を放射し、その大気中での散乱波を受信し、前記放射した電磁波と散乱した電磁波との間の周波数のドップラーシフト量に基づき、放射軸方向の遠隔風速を計測する計測部と、飛行機の揚力を制御する舵と、前記計測部での計測結果に基づき、該飛行機が突風を受けることが判明した場合に、揚力傾斜が少ない迎角を算出するとともに、揚力が変化しないような前記揚力を制御する舵の角度を算出する制御演算部とを具備する。
放射する電磁波としては、主にレーザ光が想定されるが、マイクロ波などの電波も利用できる。
気流が迎角を変化させることによる揚力の変化、および動圧の変化による揚力の変化、それぞれについて以下に示す。
風がない場合の迎角をα、飛行速度をVとすると、揚力Lは、2次元翼の理論から次式で近似的に求めることができる。
L=πρV2(α-α0)S (1)
ただし、
ρ:空気密度
α0:零揚力迎角
S:翼面積
である。
気流が迎角を変化させることによる揚力の変化、および動圧の変化による揚力の変化、それぞれについて以下に示す。
風がない場合の迎角をα、飛行速度をVとすると、揚力Lは、2次元翼の理論から次式で近似的に求めることができる。
L=πρV2(α-α0)S (1)
ただし、
ρ:空気密度
α0:零揚力迎角
S:翼面積
である。
飛行中に突風に遭遇した場合を図1に示す。飛行機200に対する突風の相対的な風ベクトルをWとし、その鉛直成分をWZ、前後成分をWXとすると突風に遭遇した場合の迎角α'は、以下の式で求めることができる。
α'=α+tan-1(WZ/(V+WZ)) (2)
α'=α+tan-1(WZ/(V+WZ)) (2)
ここで、飛行速度Vが突風Wに対して十分大きいということを考慮すると、式2は次式のように簡略化できる。
α'=α+WZ/V (3)
したがって、突風が迎角を変化させることによる揚力変化をΔLとすると、次式で求めることができる。
ΔL=πρVWZS (4)
つまり、突風による迎角変化がもたらす揚力変化ΔLは、空気密度ρと飛行速度Vと突風の鉛直成分WZとの積にほぼ比例すると言える。
α'=α+WZ/V (3)
したがって、突風が迎角を変化させることによる揚力変化をΔLとすると、次式で求めることができる。
ΔL=πρVWZS (4)
つまり、突風による迎角変化がもたらす揚力変化ΔLは、空気密度ρと飛行速度Vと突風の鉛直成分WZとの積にほぼ比例すると言える。
次に、前後風により動圧が変化した場合の上下動揺について述べる。風がない場合の揚力Lは次式で求められる。
L=(1/2)ρV2CLS (5)
ただし、
CL:揚力係数
である。
L=(1/2)ρV2CLS (5)
ただし、
CL:揚力係数
である。
したがって、突風が動圧を変化させることによる揚力変化をΔLとすると、次式で求めることができる。
ΔL=ρCLS(VWX+(1/2)WX 2) (6)
ΔL=ρCLS(VWX+(1/2)WX 2) (6)
ここで、通常WXはVに対して小さいから、(1/2)WX
2を省略すると次式を得る。
ΔL=ρCLSVWX (7)
つまり、突風による動圧変化がもたらす揚力変化ΔLは、空気密度ρと飛行速度Vと突風の前後成分WXとの積にほぼ比例すると言える。
ΔL=ρCLSVWX (7)
つまり、突風による動圧変化がもたらす揚力変化ΔLは、空気密度ρと飛行速度Vと突風の前後成分WXとの積にほぼ比例すると言える。
乱気流に等方性があると考えると、乱気流による飛行機の上下動揺は空気密度ρと飛行速度Vと突風Wとの積にほぼ比例すると言える。したがって、乱気流の強度指標は、これらの積ρVWを用いるのが妥当である。等方性についてはある程度のばらつきはあるものの、一般的には相関関係があると考えられる。飛行速度Vと突風Wとの積を表す手法としてはFhファクタ(特許文献4)があるが、突風Wを表す手法としては観測領域内の受信光のスペクトル幅で示される風速分散値を用いてもよい。空気密度ρは、気圧高度を求めるための静圧孔で計測される静圧PSに比例するため、乱気流の強度指標は、PSVWを用いてもよい。
静圧PSまたは空気密度ρおよび飛行速度Vは、あらゆる飛行機に装備されているピトー・静圧管で計測されている。飛行速度Vおよび前方の突風Wは、例えばドップラーライダーで計測可能である。このため、本発明の突風応答軽減システムでは、例えばレーザ光を送信信号として大気中に放射(送信)して、該レーザ光の大気中のエアロゾルによるレーザ散乱光を受信信号として受信し、該送信信号と該受信信号との間の周波数のドップラーシフト量に基づき遠隔領域の気流の風速を計測するドップラーライダーを利用して前方の突風を観測し、舵の自動制御により機体の動揺低減を実現する。
<突風応答低減の原理>
図2は一般的な翼型の揚力曲線を表す概念図で、S点を失速点、Aの領域をフロントサイド、Bの領域をバックサイドと称する。
Aの領域では、パイロットが操縦桿を引くと、姿勢が上を向き、短時間的には揚力が増加するために、機体が上昇する。これは、人間の感覚にとって自然な挙動である。長時間的には、飛行速度が低下するために揚力が減少し、機体は降下するが、本発明では動揺低減について述べるものであるから、短時間的な運動についてのみ考慮する。長時間的な運動については、エンジン出力を通常の操作で調節すればよい。
図2は一般的な翼型の揚力曲線を表す概念図で、S点を失速点、Aの領域をフロントサイド、Bの領域をバックサイドと称する。
Aの領域では、パイロットが操縦桿を引くと、姿勢が上を向き、短時間的には揚力が増加するために、機体が上昇する。これは、人間の感覚にとって自然な挙動である。長時間的には、飛行速度が低下するために揚力が減少し、機体は降下するが、本発明では動揺低減について述べるものであるから、短時間的な運動についてのみ考慮する。長時間的な運動については、エンジン出力を通常の操作で調節すればよい。
Bの領域では、Aの領域とは逆に、操縦桿を引くと揚力が減少して機体が降下するため、人間が操縦する場合には、特別な注意が必要である。通常は操縦桿を押して、Aの領域へ戻す操作を行う。必ずしも危険な領域ではなく、パワードリフト機などでは積極的に利用されることもある。
S点付近では、迎角の変化に対して、揚力係数の変化が少なく、鉛直風が変化したとしても揚力の変化が少ないため、機体の上下運動は抑えられる。ただし、A領域で飛行している際にS点に移行するために迎角を増加させると、機体が上昇してしまうため、水平飛行を維持するためには、揚力を適切に制御する必要がある。
揚力を制御する舵としては、例えばスポイラーが想定される。左右のエルロンを同相で変化させるフラッペロンでもよいし、両者を併用してもよい。
図3は、スポイラー角の変化によってどのように揚力係数が変化するかを模式的に示したものである。スポイラーを展開すると、揚力係数が減少するとともに、S点付近の揚力変化が少なくなる。
C点で巡航しているときに、迎角を増加させてS0点で飛行しようとすると揚力が増加するため機体は上昇する。この上昇を防ぐために、揚力係数がS2点になるようにスポイラーを展開すると、実際には迎角の増加に応じて抗力が増加して、飛行速度が低下するために揚力が減少して飛行高度が低下する。このため飛行高度を維持するために、S0点とS2点との間のS1点になるように、スポイラー角を制御すれば、水平飛行が可能であって、迎角の変化による揚力の変化が少ないため、鉛直風の変化による機体の動揺を低減することができるのである。準静的な制御であるため、機体の弾性変形の影響は生じない。
C点で巡航しているときに、迎角を増加させてS0点で飛行しようとすると揚力が増加するため機体は上昇する。この上昇を防ぐために、揚力係数がS2点になるようにスポイラーを展開すると、実際には迎角の増加に応じて抗力が増加して、飛行速度が低下するために揚力が減少して飛行高度が低下する。このため飛行高度を維持するために、S0点とS2点との間のS1点になるように、スポイラー角を制御すれば、水平飛行が可能であって、迎角の変化による揚力の変化が少ないため、鉛直風の変化による機体の動揺を低減することができるのである。準静的な制御であるため、機体の弾性変形の影響は生じない。
巡航時は通常揚抗比が最大となる最も効率の良い迎角で飛行するため、迎角を変更するとそのまま同じ推力では水平飛行ができなくなることがある。S1点が時間とともに徐々にS0点近づき、やがてスポイラー角が0となっても降下するようになる場合は、スポイラー角が0となる前に推力を増加させる必要がある。推力の増加操作は、自動であっても手動であってもよい。通常はオートパイロットの機能に含まれている。
前述のとおり、乱気流による機体動揺の程度は飛行速度に比例するものであるから、迎角の増大やスポイラーの展開により飛行速度が低下する結果として機体動揺が低減する相乗効果も期待できる。
前後風の変化による揚力の変化は、機体前方の前後風の計測値にあわせてスポイラー角を変化させて揚力の変化を相殺する。鉛直風の変化に対しては、準静的な制御であり、前後風の変化に対しては動的な制御であるため、両立は可能である。また、前後風による揚力の変化を相殺する制御は、典型的には揚力を発生する主翼に設置されたスポイラーで直接揚力を制御するものであるから、機体の弾性変形の影響を受けにくい。この点は、昇降舵の制御による揚力制御と大きく異なる利点である。
このような手法で、スポイラーを展開すると、揚抗比が低下して飛行の効率が低下する。しかしながら、本システムが作動するのは、ドップラーライダーで事前検知した乱気流に突入するときのみの一時的なものであることから、運航全体を通して考えた場合には、乱気流が想定される領域を大きく避けて飛行する必要がなくなるために、燃料の消費が少なくなることが期待される。あるいは同じ飛行経路の場合は、安全性の向上が期待できる。
本発明の一形態で利用するドップラーライダーによる観測のハードウェア上の制約として、観測可能な風速の範囲が制限されるということがある。このため、飛行機に搭載して使用する際には、飛行速度を差し引いて、差し引いた速度からの変化分を測定する手法がとられる。特許文献5では、直前観測値の平均値を飛行速度とみなしていたが、受信信号のSN比が高い場合でも観測値に異常値が含まれることがあるため、平均値では不都合があることが分かった。このため、本発明の一形態に係る飛行機の突風応答軽減システムでは、直前観測値のモード(最頻値)を飛行速度とみなす。
モードを算出するためには、観測値を有限の風速範囲で分割してヒストグラムを生成する必要があるので、飛行速度計測値の分解能は風速の分割幅に依存することになる。ただし、風速観測可能範囲に入れば良いだけなので、飛行速度は概略でよい。
一方、飛行速度自体を計測する目的で使用する場合には、前記ヒストグラムから標準偏差に基づき異常値を除外し、正常な観測値のみの平均値を求めれば、信頼性と精度が高い飛行速度を求めることができる。
揚力を制御する舵を動的に操作した場合の副作用として、一般的には機体の縦の姿勢角が変化する。縦の姿勢角の変化は飛行機の客室内の位置に応じて鉛直加速度を生ずる原因となるため、本発明の一形態に係る飛行機の突風応答軽減システムでは、縦の角加速度を低減させるために昇降舵を制御する機能を付加してもよい。
乱気流事故は、鉛直加速度が負となって人員や物品が浮き上がり、鉛直加速度が正となったときに浮遊した人員や物品が落下して怪我をするのが典型的な状況である。したがって、本発明の一形態に係る飛行機の突風応答軽減システムでは、乱気流に突入する際に、旋回飛行を行い遠心力による加速度を重力加速度に重畳することにより事故を防止する制御機能を付加してもよい。
一般的に乱気流域は高度方向の層状に分布する。したがって、高度変更中に乱気流層を通過することがしばしばある。本発明の一形態に係る飛行機の突風応答軽減システムでは、乱気流層への突入を防ぐために、高度変更中に前方の乱気流層を検知した場合には、自動的に高度変更を中断する制御機能を付加してもよい。
本発明で利用するドップラーライダーは、非常に弱い気流も観測可能であるが、観測誤差は避けることができない。このため、まったく乱気流がない場合にわずかな気流変化があるかのような信号を出力する可能性があり、その場合、機体を加振してしまう恐れがある。さらに、本発明による制御では飛行速度を低下させるため、制御の作動中は運航効率が低下する。したがって、観測された乱気流の強度が低い場合には揚力制御を行わず、ある閾値以上の場合に揚力制御を行うという基準が必要である。本発明の一形態に係る飛行機の突風応答軽減システムでは、乱気流の強度指標として、前述したρVWまたはPSVWを用いる。
乱気流の強度は、以上の指標で定義できるが、飛行機の動揺の程度は各機体の空力特性や慣性力によって異なる。したがって、危険性を判定するためには、飛行機が動揺する程度も定義する必要がある。本発明の一形態に係る飛行機の突風応答軽減システムでは、乱気流事故に関連する可能性の少ない高い周波数の揺れと低い周波数の揺れの成分を除外し、一定時間連続する最大加速度の値を飛行機の動揺の程度の指標として用いる。
個別の飛行機での乱気流の強度指標と動揺の程度の指標との対応は、飛行シミュレーションや飛行試験で明らかにすればよい。すなわち、制御が不要であるレベルの揺れや、緊急の対応が必要なレベルの揺れのときの乱気流の強度指標を調べて、制御則に反映させればよい。
風速を計測する計測部としてドップラーライダーを用いる場合には、光波の方向を変更するスキャナーに光学望遠鏡の集光機能を持たせることにより小型軽量化を実現する。該スキャナーは凸面のプリズム式であっても凹面のミラー式であってもよい。
本発明によれば、単眼ライダーを用いた場合であっても、飛行機が乱気流に遭遇した際に機体の上下動揺を低減させることができ、飛行機の安全性や快適性の向上が期待できる。
非特許文献3に示す耐空性審査要領第III部7-2-6Bでは、乱気流に突入する際の最大速度を定義しており、現状では乱気流が発生する可能性がある空域を飛行する際に減速する必要がある場合があるが、本発明によれば、乱気流を検知した時に減速すればよいため、運航効率や定時性の向上が期待できる。
以下、図面を参照しながら、本発明の実施形態を説明する
[突風応答軽減システムの構成]
図4は、本発明の一実施形態に係る飛行機に搭載される突風応答軽減システムの構成を示すブロック図である。
図4に示すように、この飛行機の突風応答軽減システムの制御コマンド生成部100は、計測部10と、制御演算部30とを備える。スキャナー300はレーザ光の放射方向を変更するための構成品であるが、本発明の実施に必須の構成品ではない。なぜなら、巡航中の飛行機の迎角や横滑り角は大きく変わることはなく、本発明の適用を近距離の乱気流への対応のみに限定した場合については、観測する領域が大きく変化することがないからである。
[突風応答軽減システムの構成]
図4は、本発明の一実施形態に係る飛行機に搭載される突風応答軽減システムの構成を示すブロック図である。
図4に示すように、この飛行機の突風応答軽減システムの制御コマンド生成部100は、計測部10と、制御演算部30とを備える。スキャナー300はレーザ光の放射方向を変更するための構成品であるが、本発明の実施に必須の構成品ではない。なぜなら、巡航中の飛行機の迎角や横滑り角は大きく変わることはなく、本発明の適用を近距離の乱気流への対応のみに限定した場合については、観測する領域が大きく変化することがないからである。
<計測部>
計測部10は、大気中にレーザ光をパルス状に放射し、この反射光を受信し、放射したレーザ光と反射光との間の周波数のドップラーシフト量に基づき光軸方向(放射軸方向)の風速を計測するものであり、光学望遠鏡11と光送受信機12と信号処理部13とを有する。
計測部10は、大気中にレーザ光をパルス状に放射し、この反射光を受信し、放射したレーザ光と反射光との間の周波数のドップラーシフト量に基づき光軸方向(放射軸方向)の風速を計測するものであり、光学望遠鏡11と光送受信機12と信号処理部13とを有する。
光学望遠鏡11は、光送受信機12で生成されたレーザ光(送信光)を大気中に向けて放射する。放射されたレーザ光は、大気中に浮遊する微小なエアロゾル粒子によって散乱される。散乱光は、光学望遠鏡11を介して光送受信機12により受信される。
光送受信機12は、単一波長、例えば1.5μmのレーザ光を生成すると共に、その大気中での散乱光を受信して、放射したレーザ光と散乱光との間の周波数の差分を電気信号に変換する。
信号処理部13は、周波数の差分信号を時分割して、距離ごとの風速を算出するものである。つまり、光学望遠鏡11を介して受信した受信光(散乱光)を送信光と比較し、ドップラー効果で生ずる周波数の変化から風速を求める。ドップラー効果による周波数変化量は典型的には風速の計測に用いられる。一般にこれはドップラーライダーと呼ばれており、ライダー(LIDAR)とは、光を利用した遠隔観測手法で「Light Detection And Ranging」を略したものである。最大観測距離は、およそ1~30kmで、この数値は大気条件により異なる。通常の旅客機であれば、この距離は4~150秒間の飛行距離に相当する。
風速の算出にあたっては、一般的にハードウェア上の制限から前記周波数の計測可能範囲が限定されるため、図5に示すように真対気速度の概略値をオフセットとして利用する。このとき、前記周波数のドップラーシフト量は、FOFST+Fdである。試作した装置での風速の計測可能範囲は±40m/sである。
真対気速度の概略値を得る手法として、特許文献5では、直前観測値の平均値を真対気速度とみなしていたが、観測値には異常値が含まれることがあるため、図6に示すように平均値では誤差が大きくなることがあることが分かった。このため、本発明の一形態に係る飛行機の突風応答軽減システムでは、1~3秒間前の観測値のモード(最頻値)を真対気速度とみなす。このとき、受信信号のSN比が例えば7dB以上など信頼性が高い観測レンジのみについてモード(最頻値)を算出してもよい。
モード(最頻値)を算出するためには、観測値を有限の風速範囲で分割してヒストグラムを生成する必要があるため、真対気速度計測値の分解能は風速の分割幅に依存することになる。前記風速の分割幅は2~5m/sが適しているので、前記分解能もその数値となる。ただし、風速観測可能範囲に入れば良いだけなので、真対気速度は分解能の低い概略値でよい。
本発明から派生的に生ずる機能として、真対気速度自体を計測する目的で使用する場合には、最新観測値の前記ヒストグラムから標準偏差に基づき例えば1σを超える異常値を除外し、正常な観測値のみの平均値を求めれば、信頼性と精度が高い真対気速度を求めることができる。静圧情報を用いれば、真対気速度を等価対気速度に変換することも可能である。
<制御演算部>
制御演算部30は、計測部10で計測した飛行予定方向の風速値に基づき、飛行機200が突風を受けることが判明した場合に、揚力傾斜が少ない迎角となるように昇降舵231の舵角コマンドをオートパイロット210に送信する。舵角変化は緩徐に行い、迎角をフィードバックして目標の迎角に設定する。加えて、揚力が変化しないようなスポイラー221の舵角コマンドをオートパイロット210に送信する。
制御演算部30は、計測部10で計測した飛行予定方向の風速値に基づき、飛行機200が突風を受けることが判明した場合に、揚力傾斜が少ない迎角となるように昇降舵231の舵角コマンドをオートパイロット210に送信する。舵角変化は緩徐に行い、迎角をフィードバックして目標の迎角に設定する。加えて、揚力が変化しないようなスポイラー221の舵角コマンドをオートパイロット210に送信する。
揚力傾斜が最も少ない迎角は、揚力係数が最大値となる迎角であって、その迎角は、例えば非特許文献2に示されているように風洞試験で得ることができる。本発明を適用するためには、予めスポイラー角ごとの最大揚力係数とそのときの迎角を風洞試験等で調べておく必要がある。
鉛直風WZの影響を低減させるために、乱気流に遭遇する3~10秒前に揚力係数が最大値となる迎角に向けて昇降舵231を自動的且つ緩徐に操作すると、機体は一時的に上昇するとともに飛行速度が低下する。このとき、昇降率をフィードバックしてスポイラー221の舵角を適切に増加させると、揚力と重量が釣り合って昇降率が0となる。その後時間とともにさらに飛行速度が低下して揚力が減少するが、スポイラー221の舵角制御には昇降率をフィードバックしているので、昇降率は0のままである。さらに時間が経過すると、スポイラー221の舵角が0になっても降下することがあるが、その前に推力を増加させて水平飛行を維持する。あるいは、運航上降下が許容される状況であれば、降下してもよい。
スポイラー角に応じて最大揚力係数のときの迎角も若干変化するから、迎角を調節するための昇降舵231の制御にはスポイラー角をフィードバックする必要がある。
前後風WXの影響については、図7に示すように、スポイラー角1としてS1点となる迎角で飛行する場合、ドップラーライダーで観測される前方の風速をWXとすると、WX遭遇時の揚力係数を、数式8で得られるCL'とすることにより、WX遭遇前後の揚力を同一とすることができる。
CL'=(V/(V+WX))2CL (8)
WXが正の場合はS2側で揚力係数がCL'となるようスポイラー角を増加させ、WXが負の場合はS0側で揚力係数がCL'となるようスポイラー角を減少させればよい。ドップラーライダーによる風速は距離ごとに独立して観測することができるため、時系列での風速変化がわかり、スポイラー角はその時系列にあわせて変更すればよい。加えて、観測は例えば5Hzの周期で更新されるので、新しい観測情報ほど重みを高くして、制御にロバスト性を持たせてもよい。
WXが正の場合はS2側で揚力係数がCL'となるようスポイラー角を増加させ、WXが負の場合はS0側で揚力係数がCL'となるようスポイラー角を減少させればよい。ドップラーライダーによる風速は距離ごとに独立して観測することができるため、時系列での風速変化がわかり、スポイラー角はその時系列にあわせて変更すればよい。加えて、観測は例えば5Hzの周期で更新されるので、新しい観測情報ほど重みを高くして、制御にロバスト性を持たせてもよい。
揚力を制御する舵は、スポイラーではなくフラッペロンでもよい。あるいは、動揺低減用の専用舵であっても、高速で作動するフラップであってもよい。複数の舵を併用してもよい。
機体の動揺を低減する従来のフィードバック制御の場合、通常機体に取り付けられた加速度センサの出力に基づき舵角を制御する。この場合、図8に示すように、まず突風に遭遇してから機体が運動するまでは機体の慣性力で遅れる。さらに機体の運動を加速度センサで計測して、適切な舵角を計算してから、舵のアクチュエータに舵角コマンドを送信するが、舵の空気力が変更されるまででも遅れが生ずる。
したがって、周波数が高い細かい揺れに対しては対応できないか、あるいは逆に加振してしまう可能性があった。
これに対して、本発明に関する遠隔気流に基づく予見制御の場合は、遅れを見込んで事前に舵を制御することができるので、平均的な遅れの影響は発生せず、遠隔気流の観測誤差や舵角誤差などわずかな影響が残るだけである。したがって、周波数が高い細かい揺れに対しても対応できるため、事故低減だけでなく乗り心地の改善が期待できる。
以上のようにスポイラーを動的に操舵した場合、縦のモーメント係数Cmが若干変化することがある。その結果ピッチングが発生して、飛行機の客室内の位置に応じて角加速度に比例した鉛直加速度を生ずる原因となるため、予めスポイラー角に応じたCmの変化量CmδSPを、風洞試験で求めておき、スポイラー角にあわせて昇降舵も変化させるとよい。
具体的には、図9に示すようなスポイラー角に応じたCmの変化量CmδSP、および昇降舵角に応じたCmの変化量CmδELの特性を予め求めておく。ある時点のスポイラー角がδSP1であるとして、スポイラー角をδSP2量に変化させるというコマンドが本発明に係わる制御のために発出された場合、CmはδCmだけ変化するので、このモーメントを相殺するために、その時点の昇降舵角がδEL1である場合には、逆のモーメントを発生させるδEL2に昇降舵角がなるようなコマンドを同時に発出する。本発明に係る迎角の変更のための昇降舵角制御は準静的な制御であり、縦のモーメント相殺のための昇降舵角制御は動的な制御であるため、両立は可能である。
CmδSPは、飛行試験で求めてもよい。角加速度を抑制するために角加速度センサの信号をフィードバックして昇降舵を制御する従来の機能を利用してもよい。
鉛直加速度が負となることを抑制するために、前方の乱気流を検知した場合に制御演算部30は、オートパイロット210に旋回コマンドを送信してもよい。例えば通常の旅客機の運航で許容される30度バンクで旋回した場合、垂直加速度が約15%増加するため、人員や物品が浮き上がる可能性を低減させることができる。
例えば特許文献6の技術を用いて、左右の旋回方向を判定し、少しでも乱気流が弱い方向に回避するための旋回飛行を行ってもよい。
高度変更中に前方の乱気流層を検知した場合には、制御演算部30は、オートパイロット210に高度変更中止のコマンドを送信してもよい。図10に示すように乱気流域は高度方向の層状に分布することが多く、これをドップラーライダーで事前検知した場合、高度変更を中止すれば、乱気流層への突入を回避することが可能となる。上昇中であっても降下中であっても同様である。
対処すべき乱気流であるかどうかの判定基準としては、前述したρVWまたはPSVWを乱気流の強度指標として用いる。特にPSVWの場合、PSは気圧高度計に利用する静圧であるため利用しやすい。風速変化量Wは乱気流に等方性があるとみなして、前記光軸方向風速変化量をWとする。VWは、特許文献4の「乱気流の検知方法」に示されるFh-ファクタを用いて、求めることができる。ただし、Fh-ファクタでは2回の計測値の差分を計算する関係上、2回の計測値のどちらか一方あるいは両方が計測不良である場合には不正な数値が算出されてしまう。このため、1回の計測でWを求める手法として、特許文献7の「遠隔乱気流検知方法およびそれを実施する装置」では、受信信号のスペクトル幅を用いることとした。しかし、現実のレーザ装置では、送信信号のスペクトル幅が0ではないために、風速幅の推定に誤差が生じることが判明した。
上記の問題を解決するために本発明では、前記光軸方向風速変化量Wとして、光送受信機12が受信した散乱光のパワースペクトル幅から送信光のパワースペクトル幅を差し引いたもの、すなわち散乱によるパワースペクトル幅の増加量が前記光軸方向風速変化量に比例するものとする。したがって、前記光軸方向風速変化量W(レンジビン内の風速の標準偏差)は、以下で与えられる。
W=λ(fdr-fdt)2 (9)
ここで、λはレーザ光の波長、fdrは受信光のパワースペクトル幅、fdtは送信光のパワースペクトル幅である。なお、Wは風速の標準偏差であるから、風速変化量に比例する。
PsVWのうち、Vは本発明による真対気速度の値でもよいし、飛行機に通常搭載されている対気速度計から求めてもよい。
ここで、λはレーザ光の波長、fdrは受信光のパワースペクトル幅、fdtは送信光のパワースペクトル幅である。なお、Wは風速の標準偏差であるから、風速変化量に比例する。
PsVWのうち、Vは本発明による真対気速度の値でもよいし、飛行機に通常搭載されている対気速度計から求めてもよい。
Wが観測精度以下の気流変化(例えば0.22m/s以下)の場合は、舵面制御により逆に加振する可能性があるため、気流変化を観測しても制御を実施しない方が妥当である。あるいは、観測された気流変化量に応じて制御ゲインを変化させてもよい。
乱気流の強度は、以上の指標で定義できるが、飛行機の動揺の程度は各機体の空力特性や慣性力によって異なる。したがって、飛行機が動揺する程度にも指標が必要である。本発明の一形態に係る飛行機の突風応答軽減システムでは、例えば、乱気流事故に関連する可能性の少ない高い周波数として2Hz以上の揺れ、低い周波数として0.1Hz以下の揺れの成分を除外し、図11に示すように0.3秒間連続する最大加速度aの値を飛行機の動揺の程度の指標として用いる。前記最大加速度aは対数で表してもよい。
個別の飛行機での乱気流の強度指標と動揺の程度の指標との対応は、飛行シミュレーションや飛行試験で明らかにすればよい。すなわち、乱気流の強度指標と実際に発生した加速度との相関係数を求め、人間の感覚に合わせた閾値を決定すればよい。本発明に係る飛行機の突風応答軽減システムによる舵面制御を実施した場合、運航効率の低下が避け難いため、推定される揺れが少ない場合は、対応しないという選択肢があり得る。
[突風応答軽減システムの使用例]
本発明に係る飛行機の突風応答軽減システムの使用例を、図12のフローチャートで説明する。
本発明に係る前方気流観測(S1)は飛行中常時実施していて、飛行機から出力されるピトー・静圧情報(S2)も含めて乱気流強度指標を算出するが(S3)、乱気流強度指標が事前に設定した閾値未満の場合は、対処不要として本発明に係る動揺低減制御を実施しない。閾値以上の場合には動揺低減制御(S4)を実施し、揚力傾斜が少ない迎角を指定するコマンド、昇降率を0とする揚力コマンド及び昇降舵で縦のモーメントを相殺するコマンドをオートパイロットに発出する。同時に乱気流強度指標と機体諸元(S5)から機体動揺指標を算出して(S6)、機体動揺指標が事前に設定した閾値未満の場合は、緊急性なしとして旋回や高度変更中止などの緊急回避制御を実施しない。機体諸元は、機体重量、飛行速度、空力データなどである。閾値以上の場合には緊急回避制御を実施し(S7)、高度変更中であれば高度変更中止コマンドを、高度変更中でなければ旋回コマンドをオートパイロットに発出する。実際に乱気流を回避できなかった場合でも、本発明に係る動揺低減制御や旋回による垂直加速度の重畳が有効に作用して、事故を低減させることができる。緊急回避についてはパイロットの判断が介在してもよい。
本発明に係る飛行機の突風応答軽減システムの使用例を、図12のフローチャートで説明する。
本発明に係る前方気流観測(S1)は飛行中常時実施していて、飛行機から出力されるピトー・静圧情報(S2)も含めて乱気流強度指標を算出するが(S3)、乱気流強度指標が事前に設定した閾値未満の場合は、対処不要として本発明に係る動揺低減制御を実施しない。閾値以上の場合には動揺低減制御(S4)を実施し、揚力傾斜が少ない迎角を指定するコマンド、昇降率を0とする揚力コマンド及び昇降舵で縦のモーメントを相殺するコマンドをオートパイロットに発出する。同時に乱気流強度指標と機体諸元(S5)から機体動揺指標を算出して(S6)、機体動揺指標が事前に設定した閾値未満の場合は、緊急性なしとして旋回や高度変更中止などの緊急回避制御を実施しない。機体諸元は、機体重量、飛行速度、空力データなどである。閾値以上の場合には緊急回避制御を実施し(S7)、高度変更中であれば高度変更中止コマンドを、高度変更中でなければ旋回コマンドをオートパイロットに発出する。実際に乱気流を回避できなかった場合でも、本発明に係る動揺低減制御や旋回による垂直加速度の重畳が有効に作用して、事故を低減させることができる。緊急回避についてはパイロットの判断が介在してもよい。
なお、離着陸時の低高度では大気中のエアロゾル粒子の密度が高くドップラーライダーの観測距離が長い、乗員乗客がシートベルトを着用している、パイロット単独の判断で飛行経路の変更ができる、本発明に係る制御に不具合が生じた場合に高度低下のリスクがある、ことから、例えば500m以下の飛行高度では、本発明に係る制御を行うよりも、単にパイロットに乱気流の事前情報を提供するだけの運用の方が望ましい。
[システムの搭載]
ドップラーライダーは、極めて弱い散乱光を受信するので、光学望遠鏡11の口径が大きいほど性能が向上する。例えば口径を150mmとした場合、試作した光アンテナ40(図13参照)の重量は約50kgで、光軸の方位を変更するためのプリズム式スキャナー301(図13参照)の重量は約45kgであった。これらは図13に示すように前後に配置された。図の左側が機首方向である。チャンバー242は光アンテナ40を機内と同様に与圧するためのもので、チャンバーウインドウ243を通して光が放出される。スキャナー301は電動モータで回転可能なプリズムを二重に配置しており、光の向きを自由に変えることができる。フェアリングウインドウ241は、これらの機器を収納するフェアリング240の前面に取り付けられた窓である。口径150mmの大型光学望遠鏡を光アンテナに配置する際には、高い剛性が必要で、構造的に軽量化は困難である。しかも、光学望遠鏡11に使われるレンズは、極めて高い光学特性が必要なため、フレネルレンズ等で軽量化することはできない。
ドップラーライダーは、極めて弱い散乱光を受信するので、光学望遠鏡11の口径が大きいほど性能が向上する。例えば口径を150mmとした場合、試作した光アンテナ40(図13参照)の重量は約50kgで、光軸の方位を変更するためのプリズム式スキャナー301(図13参照)の重量は約45kgであった。これらは図13に示すように前後に配置された。図の左側が機首方向である。チャンバー242は光アンテナ40を機内と同様に与圧するためのもので、チャンバーウインドウ243を通して光が放出される。スキャナー301は電動モータで回転可能なプリズムを二重に配置しており、光の向きを自由に変えることができる。フェアリングウインドウ241は、これらの機器を収納するフェアリング240の前面に取り付けられた窓である。口径150mmの大型光学望遠鏡を光アンテナに配置する際には、高い剛性が必要で、構造的に軽量化は困難である。しかも、光学望遠鏡11に使われるレンズは、極めて高い光学特性が必要なため、フレネルレンズ等で軽量化することはできない。
図14のAは従来の構成であるが、これをBに示すように、光学望遠鏡11の対物レンズを省略し、スキャナー302のプリズムを凸面にすることにより、対物レンズの働きを兼用するようにする。対物レンズが不要となれば、対物レンズの重量のみならず、対物レンズを支持する構造体も不要になり、光アンテナ筐体自体も小型化できるので、軽量化が可能となる。あるいは、Cのようにフェアリングウインドウ303を凸レンズにして対物レンズの働きを兼用するようにし、小型凹レンズ304を移動させることによりレーザビームの方向を変更する機構としてもよい。このとき、レーザの光軸は常にフェアリングウインドウ303の中心に向かうような機構を採用する。フェアリングウインドウ303は強度が必要なため2cm以上の厚みとなり、凸レンズにすることは容易であるし、スキャナー300よりフェアリングウインドウ303が外側にあることにより、レーザビームが欠けないようにするためにフェアリングウインドウ303のサイズを大きくする必要もなくなる。スキャナー300が不要になることの重量低減効果も大きい。
該小型凹レンズ304を移動させる具体的な機構の例を図15に示す。凸面フェアリングウインドウ303の枠に迎角変更支持具311が取り付けられており、光軸310が仰角方向に変化しても、光軸310が常に凸面フェアリングウインドウ303の中心を向くようになっている。方位の変更は方位変更支持具312を回転させることにより実現でき、小型凹レンズ304が先端に取り付けられた光送受信部314は方位変更支持具312に固定されているため、迎角変更支持具311のスリット311Sに沿って横方向に動くため、光軸310は常に凸面フェアリングウインドウ303の中心を向く。この方式の場合、送受信光の伝達に光ファイバケーブル315を使うと高出力光には向かなくなるが構造が単純になり、光送受信部を圧力隔壁250より外側のレドーム内などの非与圧部に配置することが可能となる。その結果、チャンバー242やチャンバーウインドウ243も不要となる(図13参照)。なお、通常の設計では光ファイバケーブル315出口で拡散する出力光を、まず凸レンズで平行光線にするので、出力光を凸面フェアリングウインドウ303の口径に合わせて拡散させるために304は凹レンズとなるが、前記凸レンズと304を一体化させて凸レンズとしてもよい。
一方、小型凹レンズ304を移動させるのではなく、図16に示すように複数の光送受信部314を装備すれば、同時に複数の方向を観測することができる。この場合、光ファイバケーブル315は複数となるため、等価的に高出力の光を放出することもできる。
スキャナー300はプリズム式ではなく、ミラー式の場合でも図17に示すように凹面鏡305にすれば対物レンズの代わりとなる。光軸を変更させるためには、凹面鏡305を回転させればよい。
図17に示す該凹面鏡305を回転させてレーザビーム方向を変更する場合、フェアリングの寸法に余裕が必要なため、機外の張り出しが大きくなり、空気抵抗や空力騒音が大きくなる可能性がある。このため、図18に示すように小型凸面鏡306を前後に動かすと同時に光軸が該凹面鏡305の中心を向くように該小型凸面鏡306を回転させることにより、レーザビームのエレベーション(仰角)を変更する機構としてもよい。レーザビームのアジマス(方位)を変更するには、該凹面鏡305をアジマス方向に回転させる機構としてもよい。
該小型凸面鏡306を、ラックギア307と減速ギア308を用いて前後移動と同時に回転させる具体的な機構の例を図19に示す。該ラックギア307は機体に固定されており、該減速ギア308の支持具309を前後に移動させると該小型凸面鏡306が回転する。該減速ギア308のギア比を適切に設定すれば、光軸310が常に該凹面鏡305の中心を向くように設計することが可能である。このとき該小型凸面鏡306の角度変化量の微調整が必要な場合には、該減速ギア308に楕円ギアを用いてもよい。
該小型凸面鏡306を、リンク機構を用いて前後移動と同時に回転させる具体的な機構の例を図20に示す。該小型凸面鏡306を前後に移動させると、P点は支持具に開けられた長穴309hに沿って直線運動をするが、L1がL2より短いために該小型凸面鏡306は回転運動を伴う。このときL1とL2の長さの比を適切に設定することにより、光軸が常に該凹面鏡305の中心付近を向くように設計することが可能である。
[その他]
旅客機の事故原因の半数以上は乱気流が関係しており、乱気流事故を減らすことは喫緊の課題である。このため、旅客機の場合、気象レーダーの装備が義務付けられており、乱気流を発生させる積乱雲の発見は可能だが、晴天状態で発生する乱気流は検知できない。
旅客機の事故原因の半数以上は乱気流が関係しており、乱気流事故を減らすことは喫緊の課題である。このため、旅客機の場合、気象レーダーの装備が義務付けられており、乱気流を発生させる積乱雲の発見は可能だが、晴天状態で発生する乱気流は検知できない。
これに対して、ドップラーライダーは晴天時に遠隔気流が観測できるという特長があるものの、有効観測レンジの短さが運航会社のパイロットから指摘されており、実用化の足かせとなっていた。しかし、1km程度の短い観測レンジであっても、本発明の突風応答軽減システムは、飛行機が乱気流に遭遇した場合の機体動揺を低減させる手段として好適に適用することが出来る。
以上は電磁波の一種である光波を用いるドップラーライダーの利用を前提に本発明を説明したが、電波を用いるドップラーレーダーにも適用できる。
10 計測部
11 光学望遠鏡
12 光送受信機
13 信号処理部
30 制御演算部
40 光アンテナ
100 制御コマンド生成部
200 飛行機
210 オートパイロット
221 スポイラー
231 昇降舵
240 フェアリング
241 フェアリングウインドウ
242 チャンバー
243 チャンバーウインドウ
250 圧力隔壁
300、301、302 スキャナー
303 フェアリングウインドウ
304 小型凹レンズ
305 凹面鏡
306 小型凸面鏡
307 ラックギア
308 減速ギア
309 支持具
309h 長穴
310 光軸
311 迎角変更支持具
311S スリット
312 方位変更支持具
314 光送受信部
315 光ファイバケーブル
11 光学望遠鏡
12 光送受信機
13 信号処理部
30 制御演算部
40 光アンテナ
100 制御コマンド生成部
200 飛行機
210 オートパイロット
221 スポイラー
231 昇降舵
240 フェアリング
241 フェアリングウインドウ
242 チャンバー
243 チャンバーウインドウ
250 圧力隔壁
300、301、302 スキャナー
303 フェアリングウインドウ
304 小型凹レンズ
305 凹面鏡
306 小型凸面鏡
307 ラックギア
308 減速ギア
309 支持具
309h 長穴
310 光軸
311 迎角変更支持具
311S スリット
312 方位変更支持具
314 光送受信部
315 光ファイバケーブル
Claims (14)
- 飛行機の飛行予定方向に向けて電磁波を放射し、その大気中での散乱波を受信し、前記放射した電磁波と散乱した電磁波との間の周波数のドップラーシフト量に基づき、放射軸方向の遠隔風速を計測する計測部と、
飛行機の揚力を制御する舵と、
前記計測部での計測結果に基づき、前記飛行機が突風を受けることが判明した場合に、揚力傾斜が少ない迎角を算出するとともに、揚力が変化しないような前記揚力を制御する舵の角度を算出する制御演算部と
を具備する飛行機の突風応答軽減システム。 - 請求項1に記載の飛行機の突風応答軽減システムであって、
前記計測部は、風速測定範囲を特定する真対気速度を得るために、各レンジビンの各風速計測値のヒストグラム上のモードを求める信号処理部を有する
飛行機の突風応答軽減システム。 - 請求項1乃至2に記載の飛行機の突風応答軽減システムであって、
空力データに基づき、昇降舵を自動制御して飛行機の角加速度を小さくする機能
を具備する飛行機の突風応答軽減システム。 - 請求項1乃至2に記載の飛行機の突風応答軽減システムであって、
旋回によって正の垂直加速度を重力加速度に重畳する機能
を具備する飛行機の突風応答軽減システム。 - 請求項1乃至2に記載の飛行機の突風応答軽減システムであって、
高度変更中に乱気流層を検知した場合に、高度変更を自動的に中断する機能
を具備する飛行機の突風応答軽減システム。 - 請求項1乃至5に記載の飛行機の突風応答軽減システムであって、
前記制御演算部は、乱気流の強度指標として、放射する電磁波の放射軸方向の風速変化量および飛行速度ならびに空気密度または静圧の積を用いる
飛行機の突風応答軽減システム。 - 請求項6に記載の飛行機の突風応答軽減システムであって、
前記制御演算部は、前記放射軸方向の風速変化量として、レンジビン内における散乱のパワースペクトル幅の増加量から該レンジビン内の風速幅を求め、該風速幅により乱気流の強度を数値で表す
飛行機の突風応答軽減システム。 - 請求項1乃至7に記載の飛行機の突風応答軽減システムであって、
前記制御演算部は、飛行機が動揺する程度の指標として、揺れの周波数の高い成分と低い成分を取り除き、一定時間連続する最大加速度の値を用いる
飛行機の突風応答軽減システム。 - 請求項1乃至8に記載の飛行機の突風応答軽減システムであって、
前記計測部は、放射する電磁波として光波を用い、
前記光波の方向を変更し、かつ、光学望遠鏡の集光機能を有するスキャナーをさらに具備する
飛行機の突風応答軽減システム。 - 飛行機の飛行予定方向に向けて電磁波を放射し、その大気中での散乱波を受信し、前記放射した電磁波と散乱した電磁波との間の周波数のドップラーシフト量に基づき、放射軸方向の遠隔風速を計測する計測部と、
前記計測部の計測結果に基づき前記飛行機の飛行予定方向の乱気流の強度指標を算出する制御演算部と
を有し、
前記制御演算部は、前記乱気流の強度指標として、放射する電磁波の放射軸方向の風速変化量および飛行速度ならびに空気密度または静圧の積を用いる
乱気流検知システム。 - 請求項10に記載の乱気流検知システムであって、
前記制御演算部は、前記放射軸方向の風速変化量として、レンジビン内における散乱のパワースペクトル幅の増加量から該レンジビン内の風速幅を求め、該風速幅により乱気流の強度を数値で表す
乱気流検知システム。 - 飛行機の飛行予定方向に向けて電磁波を放射し、その大気中での散乱波を受信し、前記放射した電磁波と散乱した電磁波との間の周波数のドップラーシフト量に基づき、放射軸方向の遠隔風速を計測する計測部と、
前記計測部の計測結果に基づき前記飛行機が動揺する程度の指標を算出する制御演算部と
を有し、
前記制御演算部は、前記飛行機が動揺する程度の指標として、揺れの周波数の高い成分と低い成分を取り除き、一定時間連続する最大加速度の値を用いる
動揺推定システム。 - 飛行機の飛行予定方向に向けて光波を放射し、その大気中での散乱波を受信し、前記放射した光波と散乱した光波との間の周波数のドップラーシフト量に基づき、放射軸方向の遠隔風速を計測する計測部と、
前記光波の方向を変更し、かつ、光学望遠鏡の集光機能を有するスキャナーと
を具備するドップラーライダー。 - 飛行機の飛行予定方向に向けて電磁波を放射し、その大気中での散乱波を受信し、前記放射した電磁波と散乱した電磁波との間の周波数のドップラーシフト量に基づき、放射軸方向の遠隔風速を計測し、
前記計測結果に基づき、前記飛行機が突風を受けることが判明した場合に、揚力傾斜が少ない迎角を算出するとともに、揚力が変化しないような前記揚力を制御する前記飛行機の舵の角度を算出する
飛行機の突風応答軽減方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US17/043,427 US11827337B2 (en) | 2018-04-04 | 2019-03-29 | Gust alleviation system of airplane, turbulence detection system, fluctuation estimation system, doppler LIDAR, and gust alleviation method of airplane |
| EP19780631.8A EP3778386A4 (en) | 2018-04-04 | 2019-03-29 | Aircraft gust response reduction system, turbulence sensing system, shake estimation system, doppler lidar, and aircraft gust response reduction method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018-072705 | 2018-04-04 | ||
| JP2018072705A JP7097052B2 (ja) | 2018-04-04 | 2018-04-04 | 飛行機の突風応答軽減システム及び飛行機の突風応答軽減方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019194103A1 true WO2019194103A1 (ja) | 2019-10-10 |
Family
ID=68100361
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/014210 WO2019194103A1 (ja) | 2018-04-04 | 2019-03-29 | 飛行機の突風応答軽減システム、乱気流検知システム、動揺推定システム、ドップラーライダー及び飛行機の突風応答軽減方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11827337B2 (ja) |
| EP (1) | EP3778386A4 (ja) |
| JP (1) | JP7097052B2 (ja) |
| WO (1) | WO2019194103A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115783247A (zh) * | 2022-11-11 | 2023-03-14 | 中国航空工业集团公司西安飞行自动控制研究所 | 一种用于改善纵向乘坐品质的主动控制方法 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6793878B2 (ja) * | 2018-04-26 | 2020-12-02 | 三菱電機株式会社 | レーザレーダ装置、風力発電装置および風計測方法 |
| US11656632B2 (en) * | 2019-07-12 | 2023-05-23 | The Boeing Company | Takeoff/landing stability augmentation by active wind gust sensing |
| JP7458052B2 (ja) | 2019-11-14 | 2024-03-29 | 国立研究開発法人宇宙航空研究開発機構 | 乱気流センシングシステム、航空機及び乱気流センシング方法 |
| CN111965667B (zh) * | 2020-10-14 | 2020-12-29 | 南京牧镭激光科技有限公司 | 动态补偿测风激光雷达系统及其测风方法 |
| CN113212733B (zh) * | 2021-04-30 | 2022-05-10 | 成都飞机工业(集团)有限责任公司 | 一种大展弦比常规布局无人机突风载荷减缓方法 |
| CN114355480B (zh) * | 2021-12-15 | 2023-12-22 | 中国飞行试验研究院 | 一种阵风载荷试飞天气预报保障方法 |
| JP2024035272A (ja) * | 2022-09-02 | 2024-03-14 | 国立研究開発法人宇宙航空研究開発機構 | 航空機の自動制御システム、その有効性評価方法およびその自動制御システム用の計測装置 |
Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5488600A (en) * | 1977-12-12 | 1979-07-13 | Sperry Rand Corp | Device for raising static stability |
| JPS5717174B2 (ja) | 1976-09-03 | 1982-04-09 | ||
| US4894658A (en) * | 1983-11-04 | 1990-01-16 | Motorola, Inc. | Method of data reduction in non-coherent side-looking airborne radars |
| US5237331A (en) * | 1992-05-08 | 1993-08-17 | Henderson Sammy W | Eyesafe coherent laser radar for velocity and position measurements |
| JP2011185773A (ja) * | 2010-03-09 | 2011-09-22 | Japan Aerospace Exploration Agency | 光学式エアデータセンサ |
| US20110291879A1 (en) * | 2009-02-06 | 2011-12-01 | Thales | System and method for detecting and determining remote atmospheric anomalies |
| JP4859208B2 (ja) | 2006-03-03 | 2012-01-25 | 独立行政法人 宇宙航空研究開発機構 | 乱気流の検知方法 |
| JP5398001B2 (ja) | 2009-12-07 | 2014-01-29 | 独立行政法人 宇宙航空研究開発機構 | 航空機搭載用乱気流事故防止装置 |
| JP5696987B2 (ja) | 2010-01-13 | 2015-04-08 | 独立行政法人 宇宙航空研究開発機構 | 乱気流回避操縦支援装置 |
| JP5771893B2 (ja) | 2009-11-20 | 2015-09-02 | 国立研究開発法人宇宙航空研究開発機構 | 乱気流抑制制御方法 |
| JP2015195895A (ja) | 2014-03-31 | 2015-11-09 | 株式会社ニューギン | 遊技機 |
| US20160114903A1 (en) * | 2014-10-24 | 2016-04-28 | King Abdullah University Of Science And Technology | Flight envelope protection system for unmanned aerial vehicles |
| WO2016181493A1 (ja) * | 2015-05-12 | 2016-11-17 | 三菱電機株式会社 | レーザレーダ装置及び風速観測方法 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6246929B1 (en) * | 1999-06-16 | 2001-06-12 | Lockheed Martin Corporation | Enhanced stall and recovery control system |
| JP2001039397A (ja) * | 1999-08-02 | 2001-02-13 | Komatsu Ltd | 水平回転翼を有した飛翔体 |
| DE10106516A1 (de) * | 2001-02-13 | 2002-09-05 | Astrium Gmbh | Verfahren zur Simulation variabler Beschleunigungen |
| JP3740525B2 (ja) * | 2001-07-05 | 2006-02-01 | 独立行政法人 宇宙航空研究開発機構 | 風擾乱予知システム |
| US8072584B2 (en) * | 2002-08-02 | 2011-12-06 | Ophir Corporation | Optical air data systems and methods |
| US20090048723A1 (en) * | 2003-07-31 | 2009-02-19 | The Boeing Company | Proactive optical wind shear protection and ride quality improvement system |
| DE102006053259A1 (de) | 2006-11-11 | 2008-05-21 | Airbus Deutschland Gmbh | Hochauftriebssystem am Tragflügel eines Flugzeugs und Verfahren zu seiner Betätigung |
| US8774987B2 (en) * | 2007-12-17 | 2014-07-08 | The Boeing Company | Vertical gust suppression system for transport aircraft |
| JP2012083267A (ja) * | 2010-10-13 | 2012-04-26 | Japan Aerospace Exploration Agency | マルチライダーシステム |
| JP5717174B2 (ja) | 2010-11-08 | 2015-05-13 | 独立行政法人 宇宙航空研究開発機構 | 遠隔乱気流検知方法及びそれを実施する装置 |
| DE102010060663B4 (de) * | 2010-11-18 | 2018-03-08 | Ssb Wind Systems Gmbh & Co. Kg | Meteorologische Messanordnung |
| FR2970083B1 (fr) * | 2011-01-05 | 2013-02-15 | Leosphere | Procede et dispositif de determination des mouvements d'un fluide a partir de mesures a distance de vitesses radiales. |
| EP2615026B1 (en) * | 2011-06-10 | 2018-04-04 | Airbus Defence and Space GmbH | Method and apparatus for minimizing dynamic structural loads of an aircraft |
| US8939056B1 (en) * | 2012-04-20 | 2015-01-27 | Barron Associates, Inc. | Systems, devices, and/or methods for managing targeted payload descent |
| IL222053A (en) * | 2012-09-23 | 2016-11-30 | Israel Aerospace Ind Ltd | A device, method, and computerized product for aircraft management |
| US9564055B2 (en) * | 2015-06-15 | 2017-02-07 | WxOps, Inc. | Prediction and warning of transported turbulence in long-haul aircraft operations |
| IL257811B (en) | 2015-09-02 | 2022-08-01 | Jetoptera Inc | Pleoidal propulsion system |
| US9889926B2 (en) * | 2015-11-23 | 2018-02-13 | Gulfstream Aerospace Corporation | Air vehicles and systems for preemptive turbulence mitigation |
| WO2017149526A2 (en) * | 2016-03-04 | 2017-09-08 | May Patents Ltd. | A method and apparatus for cooperative usage of multiple distance meters |
-
2018
- 2018-04-04 JP JP2018072705A patent/JP7097052B2/ja active Active
-
2019
- 2019-03-29 WO PCT/JP2019/014210 patent/WO2019194103A1/ja unknown
- 2019-03-29 EP EP19780631.8A patent/EP3778386A4/en active Pending
- 2019-03-29 US US17/043,427 patent/US11827337B2/en active Active
Patent Citations (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5717174B2 (ja) | 1976-09-03 | 1982-04-09 | ||
| JPS5488600A (en) * | 1977-12-12 | 1979-07-13 | Sperry Rand Corp | Device for raising static stability |
| US4894658A (en) * | 1983-11-04 | 1990-01-16 | Motorola, Inc. | Method of data reduction in non-coherent side-looking airborne radars |
| US5237331A (en) * | 1992-05-08 | 1993-08-17 | Henderson Sammy W | Eyesafe coherent laser radar for velocity and position measurements |
| JP4859208B2 (ja) | 2006-03-03 | 2012-01-25 | 独立行政法人 宇宙航空研究開発機構 | 乱気流の検知方法 |
| US20110291879A1 (en) * | 2009-02-06 | 2011-12-01 | Thales | System and method for detecting and determining remote atmospheric anomalies |
| JP5771893B2 (ja) | 2009-11-20 | 2015-09-02 | 国立研究開発法人宇宙航空研究開発機構 | 乱気流抑制制御方法 |
| JP5398001B2 (ja) | 2009-12-07 | 2014-01-29 | 独立行政法人 宇宙航空研究開発機構 | 航空機搭載用乱気流事故防止装置 |
| JP5696987B2 (ja) | 2010-01-13 | 2015-04-08 | 独立行政法人 宇宙航空研究開発機構 | 乱気流回避操縦支援装置 |
| JP2011185773A (ja) * | 2010-03-09 | 2011-09-22 | Japan Aerospace Exploration Agency | 光学式エアデータセンサ |
| JP5376459B2 (ja) | 2010-03-09 | 2013-12-25 | 独立行政法人 宇宙航空研究開発機構 | 光学式エアデータセンサ |
| JP2015195895A (ja) | 2014-03-31 | 2015-11-09 | 株式会社ニューギン | 遊技機 |
| US20160114903A1 (en) * | 2014-10-24 | 2016-04-28 | King Abdullah University Of Science And Technology | Flight envelope protection system for unmanned aerial vehicles |
| WO2016181493A1 (ja) * | 2015-05-12 | 2016-11-17 | 三菱電機株式会社 | レーザレーダ装置及び風速観測方法 |
Non-Patent Citations (3)
| Title |
|---|
| H. INOKUCHIH. TANAKAT. ANDO: "Development of an Onboard Doppler LIDAR for Flight Safety", JOURNAL OF AIRCRAFT, vol. 46, no. 4, July 2009 (2009-07-01), pages 1411 - 1415, XP008139384 |
| MINISTRY OF LAND, INFRASTRUCTURE, TRANSPORT AND TOURISM: "Japan Civil Aviation Bureau, Japan Transport Safety Board", DOVER PUBLICATIONS, INC., article "Airworthiness standards" |
| See also references of EP3778386A4 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115783247A (zh) * | 2022-11-11 | 2023-03-14 | 中国航空工业集团公司西安飞行自动控制研究所 | 一种用于改善纵向乘坐品质的主动控制方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3778386A1 (en) | 2021-02-17 |
| US20210016872A1 (en) | 2021-01-21 |
| JP7097052B2 (ja) | 2022-07-07 |
| EP3778386A4 (en) | 2021-12-29 |
| US11827337B2 (en) | 2023-11-28 |
| JP2019182075A (ja) | 2019-10-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2019194103A1 (ja) | 飛行機の突風応答軽減システム、乱気流検知システム、動揺推定システム、ドップラーライダー及び飛行機の突風応答軽減方法 | |
| JP5376459B2 (ja) | 光学式エアデータセンサ | |
| Rabadan et al. | Airborne lidar for automatic feedforward control of turbulent in-flight phenomena | |
| RU2373554C2 (ru) | Система раннего измерения турбулентности перед летательным аппаратом | |
| JP5398001B2 (ja) | 航空機搭載用乱気流事故防止装置 | |
| US8219266B2 (en) | Method and device for reducing on an aircraft lateral effects of a turbulence | |
| JP6583677B2 (ja) | 遠隔気流計測装置、遠隔気流計測方法及びプログラム | |
| CN112208747B (zh) | 通过主动阵风感测增强起飞/着陆稳定性 | |
| US7496433B1 (en) | Method and apparatus for minimizing the noise emitted by a rotorcraft during take-off and landing | |
| JP2007245797A (ja) | 飛行制御装置及び飛行制御装置を備えた飛行体 | |
| Hamada et al. | Lidar-based gust alleviation control system: Obtained results and flight demonstration plan | |
| US20200132841A1 (en) | Systems and methods for controlling aircraft based on sensed air movement | |
| Inokuchi et al. | Flight demonstration of a long range onboard Doppler lidar | |
| CN110930639A (zh) | 直升机机载风切变报警系统及方法 | |
| US20110299062A1 (en) | Device and method for detecting and measuring wind for an aircraft | |
| US11713112B2 (en) | Method and a system for reducing the in-flight noise from a hybrid helicopter by managing the angle of incidence of its main rotor and the thrust from each propeller | |
| US9889926B2 (en) | Air vehicles and systems for preemptive turbulence mitigation | |
| WO2024048101A1 (ja) | 航空機の自動制御システム、その有効性評価方法およびその自動制御システム用の計測装置 | |
| Inokuchi et al. | Development of an airborne wind measurement system | |
| KR101965704B1 (ko) | 고각도 착륙형 무인항공기 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19780631 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2019780631 Country of ref document: EP Effective date: 20201104 |