JP7097052B2 - 飛行機の突風応答軽減システム及び飛行機の突風応答軽減方法 - Google Patents
飛行機の突風応答軽減システム及び飛行機の突風応答軽減方法 Download PDFInfo
- Publication number
- JP7097052B2 JP7097052B2 JP2018072705A JP2018072705A JP7097052B2 JP 7097052 B2 JP7097052 B2 JP 7097052B2 JP 2018072705 A JP2018072705 A JP 2018072705A JP 2018072705 A JP2018072705 A JP 2018072705A JP 7097052 B2 JP7097052 B2 JP 7097052B2
- Authority
- JP
- Japan
- Prior art keywords
- airplane
- gust
- lift
- mitigation system
- change
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C9/00—Adjustable control surfaces or members, e.g. rudders
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C13/00—Control systems or transmitting systems for actuating flying-control surfaces, lift-increasing flaps, air brakes, or spoilers
- B64C13/02—Initiating means
- B64C13/16—Initiating means actuated automatically, e.g. responsive to gust detectors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENTS OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D45/00—Aircraft indicators or protectors not otherwise provided for
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P5/00—Measuring speed of fluids, e.g. of air stream; Measuring speed of bodies relative to fluids, e.g. of ship, of aircraft
- G01P5/26—Measuring speed of fluids, e.g. of air stream; Measuring speed of bodies relative to fluids, e.g. of ship, of aircraft by measuring the direct influence of the streaming fluid on the properties of a detecting optical wave
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/10—Simultaneous control of position or course in three dimensions
- G05D1/101—Simultaneous control of position or course in three dimensions specially adapted for aircraft
- G05D1/106—Change initiated in response to external conditions, e.g. avoidance of elevated terrain or of no-fly zones
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/10—Systems for measuring distance only using transmission of interrupted, pulse modulated waves
- G01S13/18—Systems for measuring distance only using transmission of interrupted, pulse modulated waves wherein range gates are used
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/52—Discriminating between fixed and moving objects or between objects moving at different speeds
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/95—Radar or analogous systems specially adapted for specific applications for meteorological use
- G01S13/953—Radar or analogous systems specially adapted for specific applications for meteorological use mounted on aircraft
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/50—Systems of measurement based on relative movement of target
- G01S17/58—Velocity or trajectory determination systems; Sense-of-movement determination systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/87—Combinations of systems using electromagnetic waves other than radio waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/95—Lidar systems specially adapted for specific applications for meteorological use
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4817—Constructional features, e.g. arrangements of optical elements relating to scanning
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01W—METEOROLOGY
- G01W1/00—Meteorology
- G01W2001/003—Clear air turbulence detection or forecasting, e.g. for aircrafts
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T50/00—Aeronautics or air transport
- Y02T50/30—Wing lift efficiency
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T50/00—Aeronautics or air transport
- Y02T50/40—Weight reduction
Description
前記制御演算部は、前記放射軸方向の風速変化量として、レンジビン内における散乱のパワースペクトル幅の増加量から該レンジビン内の風速幅を求め、該風速幅により乱気流の強度を数値で表してもよい。
気流が迎角を変化させることによる揚力の変化、および動圧の変化による揚力の変化、それぞれについて以下に示す。
風がない場合の迎角をα、飛行速度をVとすると、揚力Lは、2次元翼の理論から次式で近似的に求めることができる。
L=πρV2(α-α0)S (1)
ただし、
ρ:空気密度
α0:零揚力迎角
S:翼面積
である。
α'=α+tan-1(WZ/(V+WZ)) (2)
α'=α+WZ/V (3)
したがって、突風が迎角を変化させることによる揚力変化をΔLとすると、次式で求めることができる。
ΔL=πρVWZS (4)
つまり、突風による迎角変化がもたらす揚力変化ΔLは、空気密度ρと飛行速度Vと突風の鉛直成分WZとの積にほぼ比例すると言える。
L=(1/2)ρV2CLS (5)
ただし、
CL:揚力係数
である。
ΔL=ρCLS(VWX+(1/2)WX 2) (6)
ΔL=ρCLSVWX (7)
つまり、突風による動圧変化がもたらす揚力変化ΔLは、空気密度ρと飛行速度Vと突風の前後成分WXとの積にほぼ比例すると言える。
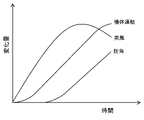
図2は一般的な翼型の揚力曲線を表す概念図で、S点を失速点、Aの領域をフロントサイド、Bの領域をバックサイドと称する。
Aの領域では、パイロットが操縦桿を引くと、姿勢が上を向き、短時間的には揚力が増加するために、機体が上昇する。これは、人間の感覚にとって自然な挙動である。長時間的には、飛行速度が低下するために揚力が減少し、機体は降下するが、本発明では動揺低減について述べるものであるから、短時間的な運動についてのみ考慮する。長時間的な運動については、エンジン出力を通常の操作で調節すればよい。
C点で巡航しているときに、迎角を増加させてS0点で飛行しようとすると揚力が増加するため機体は上昇する。この上昇を防ぐために、揚力係数がS2点になるようにスポイラーを展開すると、実際には迎角の増加に応じて抗力が増加して、飛行速度が低下するために揚力が減少して飛行高度が低下する。このため飛行高度を維持するために、S0点とS2点との間のS1点になるように、スポイラー角を制御すれば、水平飛行が可能であって、迎角の変化による揚力の変化が少ないため、鉛直風の変化による機体の動揺を低減することができるのである。準静的な制御であるため、機体の弾性変形の影響は生じない。
[突風応答軽減システムの構成]
図4は、本発明の一実施形態に係る飛行機に搭載される突風応答軽減システムの構成を示すブロック図である。
図4に示すように、この飛行機の突風応答軽減システムの制御コマンド生成部100は、計測部10と、制御演算部30とを備える。スキャナー300はレーザ光の放射方向を変更するための構成品であるが、本発明の実施に必須の構成品ではない。なぜなら、巡航中の飛行機の迎角や横滑り角は大きく変わることはなく、本発明の適用を近距離の乱気流への対応のみに限定した場合については、観測する領域が大きく変化することがないからである。
計測部10は、大気中にレーザ光をパルス状に放射し、この反射光を受信し、放射したレーザ光と反射光との間の周波数のドップラーシフト量に基づき光軸方向(放射軸方向)の風速を計測するものであり、光学望遠鏡11と光送受信機12と信号処理部13とを有する。
制御演算部30は、計測部10で計測した飛行予定方向の風速値に基づき、飛行機200が突風を受けることが判明した場合に、揚力傾斜が少ない迎角となるように昇降舵231の舵角コマンドをオートパイロット210に送信する。舵角変化は緩徐に行い、迎角をフィードバックして目標の迎角に設定する。加えて、揚力が変化しないようなスポイラー221の舵角コマンドをオートパイロット210に送信する。
WXが正の場合はS2側で揚力係数がCL'となるようスポイラー角を増加させ、WXが負の場合はS0側で揚力係数がCL'となるようスポイラー角を減少させればよい。ドップラーライダーによる風速は距離ごとに独立して観測することができるため、時系列での風速変化がわかり、スポイラー角はその時系列にあわせて変更すればよい。加えて、観測は例えば5Hzの周期で更新されるので、新しい観測情報ほど重みを高くして、制御にロバスト性を持たせてもよい。
ここで、λはレーザ光の波長、fdrは受信光のパワースペクトル幅、fdtは送信光のパワースペクトル幅である。なお、Wは風速の標準偏差であるから、風速変化量に比例する。
PsVWのうち、Vは本発明による真対気速度の値でもよいし、飛行機に通常搭載されている対気速度計から求めてもよい。
本発明に係る飛行機の突風応答軽減システムの使用例を、図12のフローチャートで説明する。
本発明に係る前方気流観測(S1)は飛行中常時実施していて、飛行機から出力されるピトー・静圧情報(S2)も含めて乱気流強度指標を算出するが(S3)、乱気流強度指標が事前に設定した閾値未満の場合は、対処不要として本発明に係る動揺低減制御を実施しない。閾値以上の場合には動揺低減制御(S4)を実施し、揚力傾斜が少ない迎角を指定するコマンド、昇降率を0とする揚力コマンド及び昇降舵で縦のモーメントを相殺するコマンドをオートパイロットに発出する。同時に乱気流強度指標と機体諸元(S5)から機体動揺指標を算出して(S6)、機体動揺指標が事前に設定した閾値未満の場合は、緊急性なしとして旋回や高度変更中止などの緊急回避制御を実施しない。機体諸元は、機体重量、飛行速度、空力データなどである。閾値以上の場合には緊急回避制御を実施し(S7)、高度変更中であれば高度変更中止コマンドを、高度変更中でなければ旋回コマンドをオートパイロットに発出する。実際に乱気流を回避できなかった場合でも、本発明に係る動揺低減制御や旋回による垂直加速度の重畳が有効に作用して、事故を低減させることができる。緊急回避についてはパイロットの判断が介在してもよい。
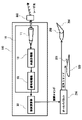
ドップラーライダーは、極めて弱い散乱光を受信するので、光学望遠鏡11の口径が大きいほど性能が向上する。例えば口径を150mmとした場合、試作した光アンテナ40(図13参照)の重量は約50kgで、光軸の方位を変更するためのプリズム式スキャナー301(図13参照)の重量は約45kgであった。これらは図13に示すように前後に配置された。図の左側が機首方向である。チャンバー242は光アンテナ40を機内と同様に与圧するためのもので、チャンバーウインドウ243を通して光が放出される。スキャナー301は電動モータで回転可能なプリズムを二重に配置しており、光の向きを自由に変えることができる。フェアリングウインドウ241は、これらの機器を収納するフェアリング240の前面に取り付けられた窓である。口径150mmの大型光学望遠鏡を光アンテナに配置する際には、高い剛性が必要で、構造的に軽量化は困難である。しかも、光学望遠鏡11に使われるレンズは、極めて高い光学特性が必要なため、フレネルレンズ等で軽量化することはできない。
旅客機の事故原因の半数以上は乱気流が関係しており、乱気流事故を減らすことは喫緊の課題である。このため、旅客機の場合、気象レーダーの装備が義務付けられており、乱気流を発生させる積乱雲の発見は可能だが、晴天状態で発生する乱気流は検知できない。
11 光学望遠鏡
12 光送受信機
13 信号処理部
30 制御演算部
40 光アンテナ
100 制御コマンド生成部
200 飛行機
210 オートパイロット
221 スポイラー
231 昇降舵
240 フェアリング
241 フェアリングウインドウ
242 チャンバー
243 チャンバーウインドウ
250 圧力隔壁
300、301、302 スキャナー
303 フェアリングウインドウ
304 小型凹レンズ
305 凹面鏡
306 小型凸面鏡
307 ラックギア
308 減速ギア
309 支持具
309h 長穴
310 光軸
311 迎角変更支持具
311S スリット
312 方位変更支持具
314 光送受信部
315 光ファイバケーブル
Claims (11)
- 飛行機の飛行予定方向に向けて電磁波を放射し、その大気中での散乱波を受信し、前記放射した電磁波と散乱した電磁波との間の周波数のドップラーシフト量に基づき、放射軸方向の遠隔風を計測する計測部と、
飛行機の揚力を制御する舵と、
前記計測部での計測結果に基づき、前記飛行機が突風を受けることが判明した場合に、前記突風による迎角変化がもたらす第1の揚力変化を空気密度又は静圧と飛行速度と突風の鉛直成分との積に基づき算出し、前記算出された第1の揚力変化に基づき揚力傾斜が少ない迎角を算出するとともに、突風による動圧変化がもたらす第2の揚力変化を空気密度又は静圧と飛行速度と突風の前後成分との積に基づき算出し、前記算出された第2の揚力変化に基づき揚力が変化しないような前記揚力を制御する舵の角度を算出する制御演算部と
を具備する飛行機の突風応答軽減システム。 - 請求項1に記載の飛行機の突風応答軽減システムであって、
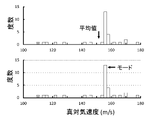
前記計測部は、風速測定範囲を特定する真対気速度を得るために、各レンジビンの各風速計測値のヒストグラム上のモードを求める信号処理部を有する
飛行機の突風応答軽減システム。 - 請求項1乃至2に記載の飛行機の突風応答軽減システムであって、
空力データに基づき、昇降舵を自動制御して飛行機の角加速度を小さくする機能
を具備する飛行機の突風応答軽減システム。 - 請求項1乃至2に記載の飛行機の突風応答軽減システムであって、
旋回によって正の垂直加速度を重力加速度に重畳する機能
を具備する飛行機の突風応答軽減システム。 - 請求項1乃至2に記載の飛行機の突風応答軽減システムであって、
高度変更中に乱気流層を検知した場合に、高度変更を自動的に中断する機能
を具備する飛行機の突風応答軽減システム。 - 請求項1乃至5に記載の飛行機の突風応答軽減システムであって、
前記制御演算部は、乱気流の強度指標として、放射する電磁波の放射軸方向の風速変化量および飛行速度ならびに空気密度または静圧の積を用いる
飛行機の突風応答軽減システム。 - 請求項6に記載の飛行機の突風応答軽減システムであって、
前記制御演算部は、前記放射軸方向の風速変化量として、レンジビン内における散乱のパワースペクトル幅の増加量から該レンジビン内の風速幅を求め、該風速幅により乱気流の強度を数値で表す
飛行機の突風応答軽減システム。 - 請求項1乃至7に記載の飛行機の突風応答軽減システムであって、
前記制御演算部は、飛行機が動揺する程度の指標として、揺れの周波数の高い成分と低い成分を取り除き、一定時間連続する最大加速度の値を用いる
飛行機の突風応答軽減システム。 - 請求項1乃至8に記載の飛行機の突風応答軽減システムであって、
前記計測部は、放射する電磁波として光波を用い、
前記光波の方向を変更し、かつ、光学望遠鏡の集光機能を有するスキャナーをさらに具備する
飛行機の突風応答軽減システム。 - 飛行機の飛行予定方向に向けて電磁波を放射し、その大気中での散乱波を受信し、前記放射した電磁波と散乱した電磁波との間の周波数のドップラーシフト量に基づき、放射軸方向の遠隔風を計測し、
前記計測結果に基づき、前記飛行機が突風を受けることが判明した場合に、前記突風による迎角変化がもたらす第1の揚力変化を空気密度又は静圧と飛行速度と突風の鉛直成分との積に基づき算出し、前記算出された第1の揚力変化に基づき揚力傾斜が少ない迎角を算出するとともに、突風による動圧変化がもたらす第2の揚力変化を空気密度又は静圧と飛行速度と突風の前後成分との積に基づき算出し、前記算出された第2の揚力変化に基づき揚力が変化しないような前記揚力を制御する前記飛行機の舵の角度を算出する
飛行機の突風応答軽減方法。 - 請求項1から9のうちいずれか1項に記載の飛行機の突風応答軽減システムであって、
前記制御演算部は、フロントサイドの領域、失速点及びバックサイドの領域を有する揚力曲線のうち、前記失速点付近に対応する前記迎角を算出し、前記算出された迎角を増加による機体の上昇を抑え、水平飛行を維持するように、前記揚力を制御する舵の角度を算出する
飛行機の突風応答軽減システム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018072705A JP7097052B2 (ja) | 2018-04-04 | 2018-04-04 | 飛行機の突風応答軽減システム及び飛行機の突風応答軽減方法 |
| EP19780631.8A EP3778386A4 (en) | 2018-04-04 | 2019-03-29 | Aircraft gust response reduction system, turbulence sensing system, shake estimation system, doppler lidar, and aircraft gust response reduction method |
| US17/043,427 US11827337B2 (en) | 2018-04-04 | 2019-03-29 | Gust alleviation system of airplane, turbulence detection system, fluctuation estimation system, doppler LIDAR, and gust alleviation method of airplane |
| PCT/JP2019/014210 WO2019194103A1 (ja) | 2018-04-04 | 2019-03-29 | 飛行機の突風応答軽減システム、乱気流検知システム、動揺推定システム、ドップラーライダー及び飛行機の突風応答軽減方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018072705A JP7097052B2 (ja) | 2018-04-04 | 2018-04-04 | 飛行機の突風応答軽減システム及び飛行機の突風応答軽減方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019182075A JP2019182075A (ja) | 2019-10-24 |
| JP2019182075A5 JP2019182075A5 (ja) | 2021-04-22 |
| JP7097052B2 true JP7097052B2 (ja) | 2022-07-07 |
Family
ID=68100361
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018072705A Active JP7097052B2 (ja) | 2018-04-04 | 2018-04-04 | 飛行機の突風応答軽減システム及び飛行機の突風応答軽減方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11827337B2 (ja) |
| EP (1) | EP3778386A4 (ja) |
| JP (1) | JP7097052B2 (ja) |
| WO (1) | WO2019194103A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024048101A1 (ja) * | 2022-09-02 | 2024-03-07 | 国立研究開発法人宇宙航空研究開発機構 | 航空機の自動制御システム、その有効性評価方法およびその自動制御システム用の計測装置 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3767340B1 (en) * | 2018-04-26 | 2023-07-05 | Mitsubishi Electric Corporation | Laser radar device, wind power generator, and wind measurement method |
| US11656632B2 (en) * | 2019-07-12 | 2023-05-23 | The Boeing Company | Takeoff/landing stability augmentation by active wind gust sensing |
| JP7458052B2 (ja) | 2019-11-14 | 2024-03-29 | 国立研究開発法人宇宙航空研究開発機構 | 乱気流センシングシステム、航空機及び乱気流センシング方法 |
| CN111965667B (zh) * | 2020-10-14 | 2020-12-29 | 南京牧镭激光科技有限公司 | 动态补偿测风激光雷达系统及其测风方法 |
| CN113212733B (zh) * | 2021-04-30 | 2022-05-10 | 成都飞机工业(集团)有限责任公司 | 一种大展弦比常规布局无人机突风载荷减缓方法 |
| CN114355480B (zh) * | 2021-12-15 | 2023-12-22 | 中国飞行试验研究院 | 一种阵风载荷试飞天气预报保障方法 |
| CN115783247A (zh) * | 2022-11-11 | 2023-03-14 | 中国航空工业集团公司西安飞行自动控制研究所 | 一种用于改善纵向乘坐品质的主动控制方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010509118A (ja) | 2006-11-11 | 2010-03-25 | エアバス・オペレーションズ・ゲーエムベーハー | 航空機翼の高揚力システム及びその操作方法 |
| JP2011185773A (ja) | 2010-03-09 | 2011-09-22 | Japan Aerospace Exploration Agency | 光学式エアデータセンサ |
| US20110291879A1 (en) | 2009-02-06 | 2011-12-01 | Thales | System and method for detecting and determining remote atmospheric anomalies |
| US20160114903A1 (en) | 2014-10-24 | 2016-04-28 | King Abdullah University Of Science And Technology | Flight envelope protection system for unmanned aerial vehicles |
| WO2016181493A1 (ja) | 2015-05-12 | 2016-11-17 | 三菱電機株式会社 | レーザレーダ装置及び風速観測方法 |
| WO2017041018A1 (en) | 2015-09-02 | 2017-03-09 | Jetoptera, Inc. | Fluidic propulsive system and thrust and lift generator for aerial vehicles |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5331026A (en) | 1976-09-03 | 1978-03-23 | Hitachi Ltd | Injection carburetter |
| US4171115A (en) | 1977-12-12 | 1979-10-16 | Sperry Rand Corporation | Stability augmentation system for relaxed static stability aircraft |
| US4894658A (en) * | 1983-11-04 | 1990-01-16 | Motorola, Inc. | Method of data reduction in non-coherent side-looking airborne radars |
| US5237331A (en) * | 1992-05-08 | 1993-08-17 | Henderson Sammy W | Eyesafe coherent laser radar for velocity and position measurements |
| US6246929B1 (en) * | 1999-06-16 | 2001-06-12 | Lockheed Martin Corporation | Enhanced stall and recovery control system |
| JP2001039397A (ja) * | 1999-08-02 | 2001-02-13 | Komatsu Ltd | 水平回転翼を有した飛翔体 |
| DE10106516A1 (de) * | 2001-02-13 | 2002-09-05 | Astrium Gmbh | Verfahren zur Simulation variabler Beschleunigungen |
| JP3740525B2 (ja) * | 2001-07-05 | 2006-02-01 | 独立行政法人 宇宙航空研究開発機構 | 風擾乱予知システム |
| US8072584B2 (en) * | 2002-08-02 | 2011-12-06 | Ophir Corporation | Optical air data systems and methods |
| US20090048723A1 (en) * | 2003-07-31 | 2009-02-19 | The Boeing Company | Proactive optical wind shear protection and ride quality improvement system |
| JP4859208B2 (ja) | 2006-03-03 | 2012-01-25 | 独立行政法人 宇宙航空研究開発機構 | 乱気流の検知方法 |
| US8774987B2 (en) * | 2007-12-17 | 2014-07-08 | The Boeing Company | Vertical gust suppression system for transport aircraft |
| JP5771893B2 (ja) | 2009-11-20 | 2015-09-02 | 国立研究開発法人宇宙航空研究開発機構 | 乱気流抑制制御方法 |
| JP5398001B2 (ja) | 2009-12-07 | 2014-01-29 | 独立行政法人 宇宙航空研究開発機構 | 航空機搭載用乱気流事故防止装置 |
| JP5696987B2 (ja) | 2010-01-13 | 2015-04-08 | 独立行政法人 宇宙航空研究開発機構 | 乱気流回避操縦支援装置 |
| JP2012083267A (ja) | 2010-10-13 | 2012-04-26 | Japan Aerospace Exploration Agency | マルチライダーシステム |
| JP5717174B2 (ja) | 2010-11-08 | 2015-05-13 | 独立行政法人 宇宙航空研究開発機構 | 遠隔乱気流検知方法及びそれを実施する装置 |
| DE102010060663B4 (de) * | 2010-11-18 | 2018-03-08 | Ssb Wind Systems Gmbh & Co. Kg | Meteorologische Messanordnung |
| FR2970083B1 (fr) * | 2011-01-05 | 2013-02-15 | Leosphere | Procede et dispositif de determination des mouvements d'un fluide a partir de mesures a distance de vitesses radiales. |
| EP2615026B1 (en) * | 2011-06-10 | 2018-04-04 | Airbus Defence and Space GmbH | Method and apparatus for minimizing dynamic structural loads of an aircraft |
| US8939056B1 (en) * | 2012-04-20 | 2015-01-27 | Barron Associates, Inc. | Systems, devices, and/or methods for managing targeted payload descent |
| IL222053A (en) * | 2012-09-23 | 2016-11-30 | Israel Aerospace Ind Ltd | A device, method, and computerized product for aircraft management |
| JP6097719B2 (ja) | 2014-03-31 | 2017-03-15 | 株式会社ニューギン | 遊技機 |
| US9564055B2 (en) * | 2015-06-15 | 2017-02-07 | WxOps, Inc. | Prediction and warning of transported turbulence in long-haul aircraft operations |
| US9889926B2 (en) * | 2015-11-23 | 2018-02-13 | Gulfstream Aerospace Corporation | Air vehicles and systems for preemptive turbulence mitigation |
| US11255663B2 (en) * | 2016-03-04 | 2022-02-22 | May Patents Ltd. | Method and apparatus for cooperative usage of multiple distance meters |
-
2018
- 2018-04-04 JP JP2018072705A patent/JP7097052B2/ja active Active
-
2019
- 2019-03-29 US US17/043,427 patent/US11827337B2/en active Active
- 2019-03-29 WO PCT/JP2019/014210 patent/WO2019194103A1/ja unknown
- 2019-03-29 EP EP19780631.8A patent/EP3778386A4/en active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010509118A (ja) | 2006-11-11 | 2010-03-25 | エアバス・オペレーションズ・ゲーエムベーハー | 航空機翼の高揚力システム及びその操作方法 |
| US20110291879A1 (en) | 2009-02-06 | 2011-12-01 | Thales | System and method for detecting and determining remote atmospheric anomalies |
| JP2011185773A (ja) | 2010-03-09 | 2011-09-22 | Japan Aerospace Exploration Agency | 光学式エアデータセンサ |
| US20160114903A1 (en) | 2014-10-24 | 2016-04-28 | King Abdullah University Of Science And Technology | Flight envelope protection system for unmanned aerial vehicles |
| WO2016181493A1 (ja) | 2015-05-12 | 2016-11-17 | 三菱電機株式会社 | レーザレーダ装置及び風速観測方法 |
| WO2017041018A1 (en) | 2015-09-02 | 2017-03-09 | Jetoptera, Inc. | Fluidic propulsive system and thrust and lift generator for aerial vehicles |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024048101A1 (ja) * | 2022-09-02 | 2024-03-07 | 国立研究開発法人宇宙航空研究開発機構 | 航空機の自動制御システム、その有効性評価方法およびその自動制御システム用の計測装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20210016872A1 (en) | 2021-01-21 |
| WO2019194103A1 (ja) | 2019-10-10 |
| EP3778386A4 (en) | 2021-12-29 |
| US11827337B2 (en) | 2023-11-28 |
| EP3778386A1 (en) | 2021-02-17 |
| JP2019182075A (ja) | 2019-10-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7097052B2 (ja) | 飛行機の突風応答軽減システム及び飛行機の突風応答軽減方法 | |
| JP5376459B2 (ja) | 光学式エアデータセンサ | |
| CA3045301C (en) | Collision-avoidance system and method for unmanned aircraft | |
| RU2373554C2 (ru) | Система раннего измерения турбулентности перед летательным аппаратом | |
| JP5398001B2 (ja) | 航空機搭載用乱気流事故防止装置 | |
| EP2555179B1 (en) | Aircraft traffic separation system | |
| US8744738B2 (en) | Aircraft traffic separation system | |
| Rabadan et al. | Airborne lidar for automatic feedforward control of turbulent in-flight phenomena | |
| JP5011301B2 (ja) | 航空機に対する垂直乱気流の影響を軽減するための方法と装置 | |
| JP2003014845A (ja) | 風擾乱予知システム | |
| CN112208747B (zh) | 通过主动阵风感测增强起飞/着陆稳定性 | |
| JP2019182075A5 (ja) | ||
| US20090043431A1 (en) | Method and apparatus for minimizing the noise emitted by a rotorcraft during take-off and landing | |
| EP3130542B1 (en) | Aircraft turbulence detection | |
| CN110930639B (zh) | 直升机机载风切变报警系统及方法 | |
| US20200132841A1 (en) | Systems and methods for controlling aircraft based on sensed air movement | |
| US9889926B2 (en) | Air vehicles and systems for preemptive turbulence mitigation | |
| WO2024048101A1 (ja) | 航空機の自動制御システム、その有効性評価方法およびその自動制御システム用の計測装置 | |
| US10583916B2 (en) | Method and apparatus for proximity control between rotating and non-rotating aircraft components | |
| Inokuchi et al. | Development of an airborne wind measurement system | |
| KR101965704B1 (ko) | 고각도 착륙형 무인항공기 | |
| WO2022060770A1 (en) | Detect and avoid system and method for aerial vehicles |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210312 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210312 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220222 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220420 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20220420 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220614 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220620 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7097052 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |