WO2019163325A1 - 風力発電装置とその制御方法 - Google Patents
風力発電装置とその制御方法 Download PDFInfo
- Publication number
- WO2019163325A1 WO2019163325A1 PCT/JP2019/000829 JP2019000829W WO2019163325A1 WO 2019163325 A1 WO2019163325 A1 WO 2019163325A1 JP 2019000829 W JP2019000829 W JP 2019000829W WO 2019163325 A1 WO2019163325 A1 WO 2019163325A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- yaw
- wind
- deviation angle
- time constant
- average
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 36
- 238000010248 power generation Methods 0.000 title abstract description 27
- 238000004364 calculation method Methods 0.000 claims abstract description 67
- 238000012935 Averaging Methods 0.000 claims abstract description 60
- 238000012545 processing Methods 0.000 claims description 23
- 238000004458 analytical method Methods 0.000 claims description 12
- 230000004044 response Effects 0.000 claims description 7
- 238000005259 measurement Methods 0.000 claims description 5
- 238000004891 communication Methods 0.000 claims description 2
- 230000007423 decrease Effects 0.000 abstract description 3
- 230000000052 comparative effect Effects 0.000 description 15
- 238000007405 data analysis Methods 0.000 description 12
- 230000000694 effects Effects 0.000 description 11
- 230000007246 mechanism Effects 0.000 description 11
- 238000013500 data storage Methods 0.000 description 10
- 238000010586 diagram Methods 0.000 description 10
- 230000008569 process Effects 0.000 description 9
- 238000009825 accumulation Methods 0.000 description 6
- 230000003247 decreasing effect Effects 0.000 description 5
- 230000008859 change Effects 0.000 description 3
- 230000007613 environmental effect Effects 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000002441 reversible effect Effects 0.000 description 3
- 230000003111 delayed effect Effects 0.000 description 2
- 230000007774 longterm Effects 0.000 description 2
- 238000010276 construction Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 238000007619 statistical method Methods 0.000 description 1
Images






Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D7/00—Controlling wind motors
- F03D7/02—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor
- F03D7/0204—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor for orientation in relation to wind direction
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/30—Control parameters, e.g. input parameters
- F05B2270/309—Rate of change of parameters
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/30—Control parameters, e.g. input parameters
- F05B2270/321—Wind directions
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/30—Control parameters, e.g. input parameters
- F05B2270/329—Azimuth or yaw angle
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/70—Wind energy
- Y02E10/72—Wind turbines with rotation axis in wind direction
Definitions
- the present invention relates to a wind turbine generator and a control method thereof, and more particularly to a wind turbine generator and a control method thereof capable of improving power generation performance and reducing mechanical wear of the wind turbine generator.
- the horizontal axis wind power generator is equipped with a yaw turning mechanism that turns the nacelle on which the wind turbine rotor is mounted about the vertical axis.
- a wind direction deviation hereinafter referred to as a yaw deviation angle
- nacelle azimuth angle a deviation angle between the azimuth angle (hereinafter referred to as nacelle azimuth angle) of the rotation axis of the wind turbine rotor and the wind direction
- the wind turbine generator receives wind from the rotor.
- these yaw control methods for example, techniques described in Patent Document 1, Patent Document 2, and Patent Document 3 are known.
- a wind condition representing a wind direction and a wind speed at a certain point has a fluctuation component having various cycles. Further, the characteristics of the periodic fluctuation component vary depending on the time zone. Since these fluctuation components are randomly included in the wind conditions, a general yaw control method is such that, for example, when the yaw deviation angle for a predetermined period exceeds a predetermined threshold, the yaw deviation angle becomes zero. Rotate the nacelle to yaw. When the yaw deviation angle can always be maintained at zero by the yaw control, the power generation amount is the largest. However, when the fluctuation speed of the wind direction is faster than the turning speed of the nacelle, the nacelle azimuth cannot follow the wind direction.
- the nacelle is stopped in a state where the yaw deviation angle is high due to a response delay of yaw control. In these cases, it is difficult to maintain the yaw deviation angle at zero. However, if the turning speed of the nacelle is excessively increased, or if the yaw turning is made sensitive to the yaw deviation angle, mechanical wear of the nacelle turning mechanism and the brake mechanism that stops the turning of the nacelle occurs. If this control method is used to positively suppress the yaw deviation angle, mechanical wear may increase.
- the present invention provides a wind turbine generator and a control method thereof that can reduce the yaw deviation angle and improve the power generation amount, and suppress the yaw drive amount to suppress mechanical wear.
- a wind turbine generator includes a rotor that rotates by receiving wind, a nacelle that rotatably supports the rotor, a tower that rotatably supports the nacelle, and yaw control.
- a wind power generator comprising: an adjustment device that adjusts yaw of the nacelle based on a command; and a control device that determines the yaw control command to be sent to the adjustment device, wherein the control device is measured by a wind direction and wind speed measurement unit.
- a yaw deviation angle calculator that calculates a yaw deviation angle from the wind direction and the direction of the rotor, an averaging processor that averages the yaw deviation angle over a predetermined period, and the yaw control command based on the average yaw deviation angle
- a control command generating unit for determining, when the turbulence degree of the wind condition is high, the averaging processing unit decreases an averaging time constant, starts yaw turning with respect to the yaw deviation angle, and / or stops yaw turning. Characterized by faster timing.
- the method for controlling a wind turbine generator includes a rotor that rotates by receiving wind, a nacelle that rotatably supports the rotor, a tower that supports the nacelle so as to be capable of yaw rotation, and a yaw control command.
- a wind power generator control method comprising: an adjustment device that adjusts the yaw of the nacelle based on the control device; and a control device that determines the yaw control command to be sent to the adjustment device, wherein the yaw is calculated from the measured wind direction and the direction of the rotor.
- the deviation angle is calculated, and the yaw deviation angle is averaged over a predetermined period to obtain the average yaw deviation angle.
- the degree of turbulence is high, the averaging time constant is reduced and the yaw rotation is performed with respect to the yaw deviation angle. The timing of starting and / or stopping the yaw rotation is made faster.
- a wind turbine generator that can reduce the yaw deviation angle and improve the power generation amount, and suppress the mechanical consumption by suppressing the yaw drive amount and a control method thereof.
- the average time constant of the average yaw deviation angle used for the yaw turning determination is shortened, and the response delay when stopping the yaw turning is suppressed, Even if the wind direction fluctuation in the reverse direction occurs during the yaw turning, the turning is stopped when the yaw deviation angle is small.
- the yaw deviation angle when the yaw turning is stopped is reduced, and the followability to the wind direction is increased, so that the power generation performance is improved. Furthermore, when the yaw deviation angle is small, not only the amount of yaw drive is reduced by quickly stopping, but also the margin for starting the next turn is increased, so the number of times of yaw drive is reduced, and the wind turbine generator mechanical It is possible to provide a wind turbine generator that can reduce consumption and a control method thereof. Problems, configurations, and effects other than those described above will be clarified by the following description of embodiments.
- FIG. 1 It is a side view which shows the whole schematic structure of the wind power generator of Example 1 which concerns on one Example of this invention. It is a top view (plan view) of the wind turbine generator shown in FIG. It is a block diagram which shows the function of the yaw control part which comprises the control apparatus shown in FIG. It is a figure which shows an example of the result of having analyzed the frequency of the accumulation
- FIG. It is a schematic diagram which shows the effect of the yaw control part which concerns on Example 1.
- FIG. It is a block diagram which shows the function of the yaw control part of Example 2 which concerns on the other Example of this invention.
- FIG. 1 is a side view showing an overall schematic configuration of a wind turbine generator of Example 1 according to an embodiment of the present invention.
- the wind turbine generator 1 includes a rotor 4 including a plurality of blades 2 and a hub 3 that connects the blades 2.
- the rotor 4 is connected to the nacelle 5 via a rotating shaft (not shown in FIG. 1), and the position of the blade 2 can be changed by rotating.
- the nacelle 5 supports the rotor 4 in a rotatable manner.
- the nacelle 5 includes a generator 6, and the rotor 4 rotates when the blade 2 receives wind, and the rotating force rotates the generator 6 to generate electric power.
- the nacelle 5 is installed on the tower 7 and can be turned around the vertical axis by a yaw turning mechanism 8 (also referred to as an adjusting device).
- the control device 9 controls the yaw turning mechanism 8 based on the wind direction detected from the wind direction and the wind speed sensor 10 that detects the wind direction and the wind speed, and the wind speed Vw.
- the wind direction and wind speed sensor 10 may be a Lidar (for example, Doppler rider), an ultrasonic wind direction anemometer, a cup-type wind direction anemometer, or the like, or may be attached to a wind power generator such as a nacelle or a tower. It may be attached to the mast or the like by a separate structure from the power generation device.
- the yaw turning mechanism 8 includes a yaw bearing, a yaw gear (yaw turning gear), a yaw turning motor, a yaw brake, and the like.
- a pitch actuator that can change the angle of the blade 2 with respect to the hub 3
- a power sensor that detects active power and reactive power output from the generator 6, and the like are provided at appropriate positions.
- FIG. 1 shows a downwind type in which power is generated by the wind direction from the nacelle 5 toward the blade 2, but an upwind type in which power is generated by a wind direction from the blade 2 toward the nacelle 5 may also be used.
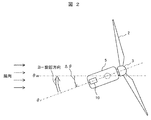
- FIG. 2 is a top view (plan view) of FIG.
- the wind direction defined as the predetermined reference direction is defined as ⁇ w
- the rotor rotation axis direction defined as the predetermined reference direction is defined as ⁇ r
- the yaw deviation angle that is the deviation angle from the wind direction ⁇ w to the rotor shaft angle ⁇ r is defined as ⁇ .
- the “predetermined reference direction” is, for example, a reference direction with north being 0 °.
- the wind direction ⁇ w may be a value acquired for each measurement cycle, an average direction for a predetermined period, or a direction calculated based on a surrounding wind condition distribution.
- the rotor shaft angle ⁇ r may be a direction in which the rotor rotation axis faces, a nacelle direction, a value measured by an encoder of a yaw turning unit, or the like.
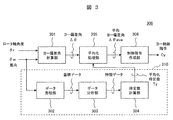
- FIG. 3 is a block diagram showing the function of the yaw control unit constituting the control device shown in FIG.
- the yaw control unit 300 includes a yaw deviation angle calculation unit 301 that calculates the yaw deviation angle ⁇ , a time constant calculation unit 310 that calculates an average time constant Ty of the yaw deviation angle ⁇ , and a yaw deviation angle.
- An averaging processing unit 305 that averages ⁇ to obtain an average yaw deviation angle ⁇ ave, and a control command creation unit 306 that determines a yaw control command Cy that controls start / stop of yaw turning based on the average yaw deviation angle ⁇ ave. It is configured.
- the time constant calculation unit 310 includes a data storage unit 302, a data analysis unit 303, and a time constant calculation unit 304.
- the yaw deviation angle calculation unit 301 determines the yaw deviation angle ⁇ based on the rotor shaft angle ⁇ r and the wind direction ⁇ w.
- the yaw deviation angle ⁇ is a difference between the wind direction ⁇ w and the rotor shaft angle ⁇ r, and indicates how far the rotor shaft is from the wind direction.
- the wind direction ⁇ w is not limited to the value detected from the wind direction and wind speed sensor 10 installed in the nacelle 5, and may be a value installed on the ground or another place.
- the wind speed Vw data is accumulated instead of the wind direction ⁇ w, and the accumulated wind speed Vw accumulation data is output as appropriate.
- the accumulated data of the wind direction ⁇ w is mainly used for time constant calculation.
- the data analysis unit 303 constituting the time constant calculation unit 310 outputs feature data based on the accumulated data of the wind direction ⁇ w.
- a frequency analysis method for accumulated data is used here.
- FIG. 4 and 5 show an example of the result of frequency analysis of the accumulated data of the wind direction ⁇ w. 4 and 5, the horizontal axis indicates the frequency, and the vertical axis indicates the magnitude of the wind direction component ⁇ f that represents the variation in the wind direction based on the frequency.
- FIG. 4 shows an example of the frequency analysis result during a period in which the wind direction fluctuation is relatively small, which is characterized in that the wind direction component ⁇ f shows a small value.
- FIG. 5 shows an example of the frequency analysis result during a period in which the wind direction variation is relatively larger than that in FIG. 4, and is characterized in that the wind direction component ⁇ f shows a large value.
- the frequency region should be set depends on the environmental conditions of the place where each wind turbine generator is installed, the calculation capability of the yaw control unit 300, the set value of the filter used in the averaging processing unit 305, and the drive of the yaw rotation Although it may be set as appropriate according to the speed, the yaw drive amount, etc., it is generally preferable that the frequency region is in the range of 10 ⁇ 4 to 10 ⁇ 0 Hz. Alternatively, the frequency region is more preferably in the range of 10 ⁇ 3 to 10 ⁇ 1 Hz.
- the range of this frequency region is limited to the frequency region of the yaw deviation angle ⁇ that can be reduced by yaw control.
- the upper limit of the range is preferably the above value for the purpose of removing high frequency components in which the influence of errors due to the structure of the wind direction and wind speed sensor 10 and noise appears.
- the lower limit of the range is preferably the above value for the purpose of removing low frequency components that are less affected by the difference in the value of the averaging time constant Ty.
- the time constant calculation unit 304 included in the time constant calculation unit 310 illustrated in FIG. 3 determines an average time constant Ty of the yaw deviation angle ⁇ based on the feature data. Specifically, in the time constant calculation unit 304, when the feature data indicating the tendency of FIG. 4 with a small wind direction component ⁇ f is small and when the feature data indicating the tendency of FIG. 5 with a large wind direction component ⁇ f is large. Thus, the magnitude of the averaging time constant Ty is adjusted to be changed. For example, in the case of FIG. 4 where the wind direction component ⁇ f is small, the averaging time constant Ty is increased, and in the case of FIG. 5 where the wind direction component ⁇ f is large, the averaging time constant Ty is decreased.
- the reason for the adjustment method of the averaging time constant Ty will be described.
- Ty the change in the average yaw deviation angle ⁇ ave becomes gentle, so that the response of the yaw control becomes slow.
- the amount of power generation is reduced because the yaw deviation angle ⁇ seen over the long term is increased, but the mechanical wear is reduced because the amount of yaw drive is reduced.
- Ty the change in the average yaw deviation angle ⁇ ave becomes faster, and the response of the yaw control becomes faster.
- the yaw deviation angle ⁇ seen in the long term is reduced, so that the amount of power generation is increased.
- the time constant calculation unit 310 performs frequency analysis on the wind direction data from the wind direction and wind speed sensor 10 to obtain frequency components, and calculates a total value of frequency components in a predetermined frequency region for each frequency region. The time constant is determined based on the frequency component value of each region.
- the time constant calculation unit 304 may not output the averaging time constant Ty sequentially, but may output it at an arbitrary cycle or timing.
- the averaging processing unit 305 determines the average yaw deviation angle ⁇ ave based on the yaw deviation angle ⁇ and the averaging time constant Ty. An average value of yaw deviation angles ⁇ in a period corresponding to the immediately preceding averaging time constant Ty is calculated, and is output as an average yaw deviation angle ⁇ ave. Further, the averaging processing unit 305 may perform a filter (low-pass filter) that passes only a predetermined frequency region of the yaw deviation angle ⁇ , represented by a low-pass filter, or a Fourier transform.
- a filter low-pass filter
- the control command creation unit 306 determines the yaw control command Cy based on the average yaw deviation angle ⁇ ave.
- a yaw control command Cy for starting yaw turning is output to the yaw turning mechanism 8.
- the yaw turning mechanism 8 operates so as to turn the nacelle 5 yaw in a direction to reduce the yaw deviation angle ⁇ .
- a yaw control command Cy for stopping the yaw turning is output to the yaw turning mechanism 8.
- FIG. 6 is a flowchart showing an outline of processing of the yaw control unit 300 shown in FIG.
- the yaw deviation angle calculation unit 301 determines the rotor shaft angle ⁇ r, and proceeds to the next step S602.
- the yaw deviation angle calculation unit 301 determines the wind direction ⁇ w, and the process proceeds to the next step S603.
- the yaw deviation angle calculation unit 301 determines the yaw deviation angle ⁇ based on the rotor shaft angle ⁇ r and the wind direction ⁇ w, and the process proceeds to the next step S604.
- the yaw deviation angle calculation unit 301 executes the processing from step S601 to step S603.
- step S604 the data accumulation unit 302 constituting the time constant calculation unit 310 accumulates the value of the wind direction ⁇ w corresponding to the time, and the process proceeds to the next step S605.
- step S605 the data analysis unit 303 constituting the time constant calculation unit 310 determines feature data based on the accumulated data, and proceeds to the next step S606.
- step S606 the time constant calculation unit 304 included in the time constant calculation unit 310 determines the average time constant Ty, and the process proceeds to the next step S607. In this way, the time constant calculation unit 310 executes the processing from step S604 to step S606.
- step S607 the averaging processing unit 305 calculates the average yaw deviation angle ⁇ ave based on the yaw deviation angle ⁇ input from the yaw deviation angle calculation unit 301 and the averaged time constant Ty input from the time constant calculation unit 310.
- the process proceeds to the next step S608.
- step S608 after the control command creation unit 306 determines the yaw control command Cy based on the average yaw deviation angle ⁇ ave, the series of processing ends.
- FIG. 7 is a schematic diagram illustrating the effect of the yaw control unit 300 according to the first embodiment, and the horizontal axis indicates the common time.
- the vertical axis in the upper part of FIG. 7 indicates the rotor shaft angle ⁇ r and the wind direction ⁇ w
- the vertical axis in the middle part of FIG. 7 indicates the yaw deviation angle ⁇
- the broken line in FIG. 7 shows a result when the averaging time constant Ty is always large as a comparative example when the yaw control unit 300 according to the present embodiment is not applied.
- the solid line shows the result when the yaw control unit 300 according to the present embodiment is applied.
- the wind direction ⁇ w repeatedly fluctuates and greatly fluctuates on the + side, and then fluctuates greatly on the ⁇ side.
- yaw turning is started at time T1 and the rotor shaft angle ⁇ r follows the wind direction ⁇ w
- yaw turning is started at time T2. Therefore, since the present embodiment has better followability to the wind direction ⁇ w than the comparative example during the yaw turning, the yaw deviation angle ⁇ during the period from time T1 to time T3 is as shown in the middle of FIG. This example is smaller than the comparative example. Therefore, as shown in the lower part of FIG. 7, the power generation output Pe in this period (period from time T1 to time T3) is larger in the present embodiment than in the comparative example. That is, this example shows that the annual power generation amount is higher than that of the comparative example.
- yaw turning is stopped at time T3, and in the comparative example, yaw turning is stopped at time T4.
- the time from when the rotor shaft angle ⁇ r intersects the wind direction ⁇ w to when the yaw rotation is stopped is shorter in this embodiment than in the comparative example.
- the yaw turning is started at time T4 in this embodiment, and the yaw turning is started at time T5 in the comparative example. Yes.
- the start of the yaw turning is delayed with respect to the fluctuation of the wind direction ⁇ w than at the time T2. Therefore, as shown in the middle of FIG. 7, the yaw deviation angle ⁇ during the period from time T4 to time T6 is smaller in the present embodiment than in the comparative example. Therefore, as shown in the lower part of FIG. 7, the power generation output Pe in this period (period from time T4 to time T6) is also larger in the present embodiment than in the comparative example.
- the wind power generator and the control method thereof that can reduce the yaw deviation angle and improve the power generation amount, and suppress the mechanical consumption by suppressing the yaw drive amount. It becomes possible to provide. Specifically, when the wind direction fluctuation is severe, the power generation amount is improved by reducing the averaging time constant Ty. When the wind direction fluctuation is not severe, the average time constant Ty is increased to reduce mechanical wear. Therefore, when the magnitude and period of the wind direction variation differ depending on the place and time, it is possible to achieve both improvement in the power generation performance of the wind turbine generator and reduction in mechanical wear.
- the wind load applied to the wind turbine generator from the side or obliquely becomes small, which is effective in suppressing damage to the wind turbine generator and extending the mechanical life.
- the wind turbine generator is equipped with a function to immediately suppress or stop power generation. is there.
- the timing for starting the yaw turning is earlier than in the comparative example described above, and the followability to the wind direction ⁇ w is good. Therefore, the opportunity for power generation to be suppressed or stopped due to an excessive yaw deviation angle ⁇ is reduced, which is effective in improving the power generation amount.
- the time constant calculation unit 304 sets at least an average time constant Ty for determining yaw turning start and / or yaw turning stop for each of a plurality of frequency regions, makes the time constant variable, and switches control depending on the wind direction. You can also. Specifically, based on the frequency analysis result of the wind direction data, at least the averaging time constant for starting the yaw rotation and / or the average for determining the yaw rotation stop for a plurality of predetermined frequency regions. Create a time constant.
- the averaging processing unit is configured to determine the average yaw used for the yaw rotation start determination and the yaw rotation stop determination based on the averaging time constant for starting the yaw rotation and / or the averaging time constant for determining the yaw rotation stop. Create the deviation angle.
- the control command creation unit 306 creates a yaw control command Cy by switching the average yaw deviation angle between the start of yaw turning and the stop of yaw turning.
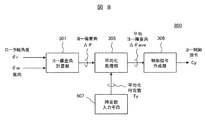
- FIG. 8 is a block diagram showing functions of the yaw control unit of the second embodiment according to another embodiment of the present invention.
- the present embodiment is different from the above-described first embodiment in that the averaging time constant Ty is previously set in the control device 9 as a fixed setting value obtained by past experience or calculation and is operated offline.
- Other configurations are the same as those of the first embodiment.
- the same components as those in the first embodiment are denoted by the same reference numerals.
- the time constant calculation unit 310 calculates and updates the average time constant Ty at every control cycle or at an appropriate timing.
- the yaw control unit 800 of the present embodiment shown in FIG. 8 includes a yaw deviation angle calculation unit 301 for obtaining the yaw deviation angle ⁇ , and an average for obtaining the average yaw deviation angle ⁇ ave by averaging the yaw deviation angle ⁇ .
- a control command creating unit 306 for determining a yaw control command Cy for controlling start / stop of yaw turning based on the average yaw deviation angle ⁇ ave, and a time constant for calculating the average yaw deviation angle ⁇ ave.
- the calculation unit 310 is not provided.
- the averaging time constant Ty given to the averaging processing unit 305 is preset in the averaging processing unit 305 constituting the yaw control unit 800 in advance, or is set from the outside by the time constant input unit 807 at an appropriate timing.
- the time constant input unit 807 is an input device such as a keyboard and may be input by an operator.
- the function of the time constant calculation unit 310 shown in the first embodiment is configured in an analysis device provided at a place different from the wind power plant. For example, in the research and design stages before the wind power plant construction. An averaged time constant Ty in a typical wind condition of the wind power plant is calculated in advance from the obtained environmental conditions, and incorporated in the yaw control unit 800 as a preset value.
- the typical wind conditions are prepared, for example, every season or every evening or morning, and may be switched and used under appropriate conditions.
- the function of the time constant calculation part 310 shown in the above-mentioned Example 1 is comprised in the analyzer provided in the place different from a wind power plant, for example, the operation
- An average time constant Ty in a typical wind condition of the wind power plant is calculated from the observed environmental conditions, and averaged in the yaw control unit 800 via a time constant input unit 807 provided with a communication unit This is given to the processing unit 305.
- the setting of the averaging time constant Ty is not of a type that can be immediately handled online according to the wind conditions at the site, but is operated by giving a value obtained offline at an appropriate timing.
- the control based on the optimized time constant can be updated so that the control of the present invention is mounted on the existing windmill without major modification. It can be performed.
- FIG. 9 is a block diagram showing functions of the yaw control unit of the third embodiment according to another embodiment of the present invention.
- the present embodiment is different from the first embodiment in that the data accumulation unit 902 that constitutes the time constant calculation unit 910 of the yaw control unit 900 accumulates data of the wind speed Vw instead of the wind direction ⁇ w.
- Other configurations are the same as those of the first embodiment.
- the same components as those in the first embodiment are denoted by the same reference numerals.
- the yaw control unit 900 includes a yaw deviation angle calculation unit 301 that calculates the yaw deviation angle ⁇ , a time constant calculation unit 910 that calculates an average time constant Ty of the yaw deviation angle ⁇ , and a yaw deviation angle.
- An averaging processing unit 305 that averages ⁇ to obtain an average yaw deviation angle ⁇ ave, and a control command creation unit 306 that determines a yaw control command Cy that controls start / stop of yaw turning based on the average yaw deviation angle ⁇ ave. It is configured.
- the time constant calculation unit 910 includes a data storage unit 902, a data analysis unit 903, and a time constant calculation unit 904.
- the yaw control unit 900 of the present embodiment the yaw deviation angle calculation unit 301, the averaging processing unit 305, and the control command generation unit 306 are the same as those in the first embodiment, but the data storage unit that constitutes the time constant calculation unit 910 The point that the input 902 is the wind speed Vw is different from the first embodiment.
- the data accumulation unit 902 constituting the time constant calculation unit 910 outputs accumulated data of the wind speed Vw based on the wind speed Vw detected from the wind direction wind speed sensor 10. Note that the wind speed Vw measured here is detected from the wind direction wind speed sensor 10 fixed to the nacelle 5, and is the wind speed in the direction in which the nacelle 5 faces at that time.
- the data analysis unit 903 constituting the time constant calculation unit 910 outputs feature data based on the accumulated data of the wind speed Vw.
- the feature data in this case is the turbulence intensity Iref in a predetermined period.
- the turbulence intensity Iref is obtained by a ratio between the standard deviation Vv of the wind speed and the average value Vave of the wind speed in a predetermined period. That is, the data analysis unit 903 outputs the turbulent intensity Iref as feature data by calculating the following equation (1).
- Iref Vv / Vave (1)
- a time constant calculation unit 904 constituting the time constant calculation unit 910 determines an averaged time constant Ty based on the turbulence intensity Iref that is characteristic data.
- the averaging time constant Ty is decreased.
- the averaging time constant Ty is increased. This is because there is a positive correlation between the average value and the total value of the frequency components of the wind direction ⁇ w in the first embodiment and the turbulence intensity Iref in the present embodiment, and the turbulence intensity Iref is large when the wind direction fluctuation is severe. This is because the turbulence intensity Iref becomes small when the wind direction fluctuation is moderate.
- the process of the yaw control unit 900 by applying the process of the yaw control unit 900, the same effect as that of the first embodiment can be realized by a simpler process.
- the wind turbine generator 1 of Example 4 which concerns on the other Example of this invention is demonstrated.
- the wind turbine generator 1 of the present embodiment has the same configuration as the yaw control unit 300 of the first embodiment described above, but the processing in the data analysis unit 303 and the time constant calculation unit 304 is different from that of the first embodiment.
- the standard deviation ⁇ of the wind direction ⁇ w in a predetermined period is calculated by statistical analysis based on the wind direction ⁇ w, and is output as characteristic data of the wind condition.
- the time constant calculation unit 304 constituting the time constant calculation unit 310 determines an average time constant Ty of yaw control based on the standard deviation ⁇ that is feature data.
- the averaging time constant Ty is decreased.
- the averaging time constant Ty is decreased.
- the same effect as that of the first embodiment can be realized by a simpler process.
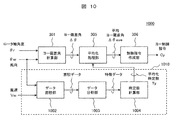
- FIG. 10 is a block diagram showing functions of the yaw control unit of the fifth embodiment according to another embodiment of the present invention.
- This embodiment is different from the first embodiment in that the data storage unit 1002 constituting the time constant calculation unit 1010 of the yaw control unit 1000 stores data of the wind speed Vw in addition to the wind direction ⁇ w.
- Other configurations are the same as those of the first embodiment.
- the same components as those in the first embodiment are denoted by the same reference numerals.
- the yaw control unit 1000 includes a yaw deviation angle calculation unit 301 that calculates the yaw deviation angle ⁇ , a time constant calculation unit 1010 that calculates an average time constant Ty of the yaw deviation angle ⁇ , and a yaw deviation angle.
- An averaging processing unit 305 that averages ⁇ to obtain an average yaw deviation angle ⁇ ave, and a control command creation unit 306 that determines a yaw control command Cy that controls start / stop of yaw turning based on the average yaw deviation angle ⁇ ave. It is configured.
- the time constant calculation unit 1010 includes a data storage unit 1002, a data analysis unit 1003, and a time constant calculation unit 1004.
- the yaw deviation angle calculation unit 301, the averaging processing unit 305, and the control command creation unit 306 are the same as those in the first embodiment, but the data storage unit that constitutes the time constant calculation unit 1010 The point that the wind speed Vw is added to the input of 1002 is different from the first embodiment.
- the data storage unit 1002 constituting the time constant calculation unit 1010 outputs accumulated data of the wind direction ⁇ w and the wind speed Vw based on the wind direction ⁇ w and the wind speed Vw detected from the wind direction / wind speed sensor 10. Note that the wind speed Vw measured here is detected from the wind direction wind speed sensor 10 fixed to the nacelle 5, and is the wind speed in the direction in which the nacelle 5 faces at that time.
- the data analysis unit 1003 constituting the time constant calculation unit 1010 outputs feature data based on the accumulated data of the wind direction ⁇ w. Further, based on the accumulated data of the wind speed Vw, the average wind speed Vwave during a predetermined period is output.
- the time constant calculation unit 1004 constituting the time constant calculation unit 1010 determines the average time constant Ty based on the feature data as in the first embodiment, but when the average wind speed Vwave is low and power is not generated, and / or Alternatively, when the average wind speed Vwave is high and reaches the rated output, the averaging time constant Ty is set to a large value.
- the present invention is not limited to the above-described embodiments, and various modifications can be made.
- the above-described embodiments are illustrated for easy understanding of the present invention, and are not necessarily limited to those having all the configurations described.
- a part of the configuration of one embodiment can be replaced with the configuration of another embodiment, and the configuration of another embodiment can be added to the configuration of one embodiment.
- the control lines and information lines shown in the figure are those that are considered necessary for the explanation, and not all the control lines and information lines that are necessary on the product are shown. Actually, it may be considered that almost all the components are connected to each other.
- the data storage unit 302, the data analysis unit 303, and the time constant calculation unit 304 in the yaw control units 300, 800, 900, and 1000 may be provided in an external device instead of the control device 9.
- the average time constant Ty of yaw control calculated in the above-described embodiment may be applied to other wind power generators 1 at the same site or wind power generators 1 at other sites where wind conditions are close.
- the data storage unit 302 in the yaw control units 300, 800, 900, and 1000 holds only the wind data accumulated in the past without sequentially inputting the wind data including the wind direction ⁇ w. Also good.
- the wind direction and wind speed sensor 10 is installed on the nacelle 5, but it may be installed in the nacelle 5 or around the wind power generator 1 instead of this location.
Landscapes
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Wind Motors (AREA)
Abstract
ヨー偏差角を低減して発電量を向上しつつ、且つ、ヨー駆動量を抑制して機械的消耗を抑制し得る風力発電装置とその制御方法を提供する。 風力発電装置(1)は、風を受けて回転するロータ(4)、ロータ(4)を回転可能に支持するナセル(5)、ナセル(5)をヨー旋回可能に支持するタワー(7)、ヨー制御指令に基づいてナセル(5)のヨーを調整する調整装置(8)、及び、調整装置(8)に送るヨー制御指令を定める制御装置(9)を備える。制御装置(9)は、風向風速測定部により測定された風向とロータ(4)の方向からヨー偏差角を算出するヨー偏差角計算部(301)、ヨー偏差角を所定の期間で平均化する平均化処理部(305)、平均ヨー偏差角に基づきヨー制御指令を定める制御指令作成部(306)を備え、平均化処理部(305)は、風況の乱れ度が高い場合、平均化時定数を小さくし、ヨー偏差角に対してヨー旋回を開始及び/又はヨー旋回の停止のタイミングを速くする。
Description
本発明は、風力発電装置とその制御方法に係り、特に発電性能を向上させるとともに、風力発電装置の機械的消耗を低減することが可能な風力発電装置とその制御方法に関する。
水平軸型の風力発電装置では、風車ロータを搭載するナセルを垂直軸まわりに旋回させるヨー旋回機構が備わっている。風力発電装置は、風車ロータの回転軸の方位角(以下、ナセル方位角と呼ぶ)と風向との偏差角を表す風向偏差(以下、ヨー偏差角と呼ぶ)が生じた場合、ロータの受風面積の減少により発電効率が低下するのを防ぐため、ヨー旋回機構を制御してヨー偏差角をなくすように動作することが知られている。これらヨー制御の方法として例えば、特許文献1、特許文献2、特許文献3に記載される技術が知られている。
ある地点における風向や風速を表す風況は、様々な周期を持つ変動成分を有する。また、時間帯によってもその周期的な変動成分の特徴が異なる。風況には、これらの変動成分がランダムに含まれるため、一般的なヨー制御方法は、例えばある所定期間のヨー偏差角が所定の閾値を超えた場合に、ヨー偏差角がゼロになるようにナセルをヨー旋回させる。
ヨー制御によりヨー偏差角を常にゼロに維持できた時、最も発電量が多くなる。しかし、ナセルの旋回速度よりも風向の変動速度の方が速い場合、ナセル方位角を風向に追従できない。また、風向の変動頻度が高く、ヨー旋回中に風向が逆方向に変わる場合、ヨー制御の応答遅れによりヨー偏差角が高い状態でナセルを停止させてしまう。これらの場合、ヨー偏差角をゼロに維持することは困難である。しかし、ナセルの旋回速度を高くし過ぎたり、或は、ヨー偏差角に対して過敏にヨー旋回させると、ナセル旋回機構やナセルの旋回を停止するブレーキ機構の機械的消耗が発生する。この制御方法を用いて、ヨー偏差角を積極的に抑制しようとすると、機械的摩耗が大きくなる恐れがある。
ヨー制御によりヨー偏差角を常にゼロに維持できた時、最も発電量が多くなる。しかし、ナセルの旋回速度よりも風向の変動速度の方が速い場合、ナセル方位角を風向に追従できない。また、風向の変動頻度が高く、ヨー旋回中に風向が逆方向に変わる場合、ヨー制御の応答遅れによりヨー偏差角が高い状態でナセルを停止させてしまう。これらの場合、ヨー偏差角をゼロに維持することは困難である。しかし、ナセルの旋回速度を高くし過ぎたり、或は、ヨー偏差角に対して過敏にヨー旋回させると、ナセル旋回機構やナセルの旋回を停止するブレーキ機構の機械的消耗が発生する。この制御方法を用いて、ヨー偏差角を積極的に抑制しようとすると、機械的摩耗が大きくなる恐れがある。
特許文献1に開示される方法では、特にある地点の風況の乱れ度が高い場合、ヨー旋回中に風向が逆方向に変動すると、ヨー旋回の停止が遅れてヨー偏差角が大きい時にナセルを停止させてしまう。したがって、短期間しかヨー偏差角を抑制できずに発電性能が低下するのみならず、必要以上にヨー旋回をすることでヨーの駆動量が多くなり機械的消耗が増加する可能性がある。
そこで、本発明は、ヨー偏差角を低減して発電量を向上しつつ、且つ、ヨー駆動量を抑制して機械的消耗を抑制し得る風力発電装置とその制御方法を提供する。
そこで、本発明は、ヨー偏差角を低減して発電量を向上しつつ、且つ、ヨー駆動量を抑制して機械的消耗を抑制し得る風力発電装置とその制御方法を提供する。
上記課題を解決するため、本発明に係る風力発電装置は、風を受けて回転するロータと、前記ロータを回転可能に支持するナセルと、前記ナセルをヨー旋回可能に支持するタワーと、ヨー制御指令に基づいて前記ナセルのヨーを調整する調整装置と、前記調整装置に送る前記ヨー制御指令を定める制御装置とを備える風力発電装置であって、前記制御装置は、風向風速測定部により測定された風向と前記ロータの方向からヨー偏差角を算出するヨー偏差角計算部と、前記ヨー偏差角を所定の期間で平均化する平均化処理部と、平均ヨー偏差角に基づき前記ヨー制御指令を定める制御指令作成部を備え、前記平均化処理部は
、風況の乱れ度が高い場合、平均化時定数を小さくし、前記ヨー偏差角に対してヨー旋回を開始及び/又はヨー旋回の停止のタイミングを速くすることを特徴とする。
また、本発明に係る風力発電装置の制御方法は、風を受けて回転するロータと、前記ロータを回転可能に支持するナセルと、前記ナセルをヨー旋回可能に支持するタワーと、ヨー制御指令に基づいて前記ナセルのヨーを調整する調整装置と、前記調整装置に送る前記ヨー制御指令を定める制御装置とを備える風力発電装置の制御方法であって、測定された風向と前記ロータの方向からヨー偏差角を算出し、前記ヨー偏差角を所定の期間で平均化し平均ヨー偏差角を求め、風況の乱れ度が高い場合、平均化時定数を小さくし、前記ヨー偏差角に対してヨー旋回を開始及び/又はヨー旋回の停止のタイミングを速くすることを特徴とする。
、風況の乱れ度が高い場合、平均化時定数を小さくし、前記ヨー偏差角に対してヨー旋回を開始及び/又はヨー旋回の停止のタイミングを速くすることを特徴とする。
また、本発明に係る風力発電装置の制御方法は、風を受けて回転するロータと、前記ロータを回転可能に支持するナセルと、前記ナセルをヨー旋回可能に支持するタワーと、ヨー制御指令に基づいて前記ナセルのヨーを調整する調整装置と、前記調整装置に送る前記ヨー制御指令を定める制御装置とを備える風力発電装置の制御方法であって、測定された風向と前記ロータの方向からヨー偏差角を算出し、前記ヨー偏差角を所定の期間で平均化し平均ヨー偏差角を求め、風況の乱れ度が高い場合、平均化時定数を小さくし、前記ヨー偏差角に対してヨー旋回を開始及び/又はヨー旋回の停止のタイミングを速くすることを特徴とする。
本発明によれば、ヨー偏差角を低減して発電量を向上しつつ、且つ、ヨー駆動量を抑制して機械的消耗を抑制し得る風力発電装置とその制御方法を提供することが可能となる。
具体的には、ある程度速い周期の風速または風向変動が頻発する場合、ヨー旋回の判定に用いる平均ヨー偏差角の平均化時定数を短くし、ヨー旋回停止時の応答遅れを抑制することで、ヨー旋回中に逆方向の風向変動が発生しても、ヨー偏差角が小さいときに旋回を停止する。したがって、ヨー旋回停止時のヨー偏差角が低減し、風向への追従性が高くなるため発電性能が向上する。さらに、ヨー偏差角が小さいときに速やかに停止することでヨーの駆動量が減るのみならず、次の旋回開始までの余裕度が大きくなるためヨーの駆動回数が減り、風力発電装置の機械的消耗の低減も両立させることが可能な風力発電装置とその制御方法を提供できる。
上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
具体的には、ある程度速い周期の風速または風向変動が頻発する場合、ヨー旋回の判定に用いる平均ヨー偏差角の平均化時定数を短くし、ヨー旋回停止時の応答遅れを抑制することで、ヨー旋回中に逆方向の風向変動が発生しても、ヨー偏差角が小さいときに旋回を停止する。したがって、ヨー旋回停止時のヨー偏差角が低減し、風向への追従性が高くなるため発電性能が向上する。さらに、ヨー偏差角が小さいときに速やかに停止することでヨーの駆動量が減るのみならず、次の旋回開始までの余裕度が大きくなるためヨーの駆動回数が減り、風力発電装置の機械的消耗の低減も両立させることが可能な風力発電装置とその制御方法を提供できる。
上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
以下、図面を用いて本発明の実施例について説明する。
図1は、本発明の一実施例に係る実施例1の風力発電装置の全体概略構成を示す側面図である。図1に示すように、風力発電装置1は、複数のブレード2と、ブレード2を接続するハブ3とで構成されるロータ4を備える。ロータ4は、ナセル5に回転軸(図1では省略する)を介して連結されており、回転することでブレード2の位置を変更可能である。ナセル5は、ロータ4を回転可能に支持している。ナセル5は、発電機6を備え、ブレード2が風を受けることでロータ4が回転し、その回転力が発電機6を回転させることで電力を発生させることができる。
ナセル5は、タワー7上に設置されており、ヨー旋回機構8(調整装置とも称される)によって垂直軸まわりにヨー旋回可能である。制御装置9は、風向と風速とを検出する風向風速センサ10から検出した風向や、風速Vwに基づいて、ヨー旋回機構8を制御する。風向風速センサ10は、Lidar(例えば、ドップラーライダー)、超音波風向風速計、カップ式風向風速計等であってもよく、ナセルやタワー等の風力発電装置に取り付けられていてもよいし、風力発電装置とは別構造物でマスト等に取り付けられていてもよい。
なお、ヨー旋回機構8は、ヨーベアリングやヨーギア(ヨー旋回用歯車)、ヨー旋回モータ、ヨーブレーキ等から構成されている。また、ハブ3に対するブレード2の角度を変更可能なピッチアクチュエータ、発電機6が出力する有効電力や無効電力を検出する電力センサ等を適宜位置に備えている。また、図1は、ナセル5からブレード2に向かう風向の風で発電するダウンウィンド式であるが、ブレード2からナセル5に向かう風向の風で発電するアップウィンド式であってもよい。
図2は、図1の上面図(平面図)である。所定の基準方向となす風向をθw、所定の基準方向となすロータ回転軸の方向をθr、風向θwからロータ軸角度θrまでの偏差角であるヨー偏差角をΔθと定義し、これらの関係を図示している。ここで、「所定の基準方向」とは、例えば、北を0°として基準方向とする。なお、北に限らず基準となる方向を任意に設定しても良い。なお、風向θwは、計測周期ごとに取得された値であってもよいし、所定期間の平均方向であってもよいし、周辺の風況分布に基づき算出された方向であってもよい。また、ロータ軸角度θrは、ロータ回転軸の向く方向であってもよいし、ナセルの方向であってもよいし、ヨー旋回部のエンコーダにより計測された値等であってもよい。
図3から図7を用いて、本実施例に係る風力発電装置1の制御装置9を構成するヨー制御部300について説明する。
図3は、図1に示す制御装置を構成するヨー制御部の機能を示すブロック線図である。図3に示すように、ヨー制御部300は、ヨー偏差角Δθを求めるヨー偏差角計算部301と、ヨー偏差角Δθの平均化時定数Tyを算出する時定数算出部310と、ヨー偏差角Δθを平均化処理して平均ヨー偏差角Δθaveを求める平均化処理部305と、平均ヨー偏差角Δθaveに基づいてヨー旋回の開始/停止を制御するヨー制御指令Cyを定める制御指令作成部306により構成されている。時定数算出部310は、データ蓄積部302、データ分析部303、時定数計算部304により構成されている。
図3は、図1に示す制御装置を構成するヨー制御部の機能を示すブロック線図である。図3に示すように、ヨー制御部300は、ヨー偏差角Δθを求めるヨー偏差角計算部301と、ヨー偏差角Δθの平均化時定数Tyを算出する時定数算出部310と、ヨー偏差角Δθを平均化処理して平均ヨー偏差角Δθaveを求める平均化処理部305と、平均ヨー偏差角Δθaveに基づいてヨー旋回の開始/停止を制御するヨー制御指令Cyを定める制御指令作成部306により構成されている。時定数算出部310は、データ蓄積部302、データ分析部303、時定数計算部304により構成されている。
このうちヨー偏差角計算部301は、ロータ軸角度θrと風向θwに基づき、ヨー偏差角Δθを決定する。このヨー偏差角Δθは図2に示すように、風向θwとロータ軸角度θrの差分であり、ロータ軸が風向からどれくらいずれているかを示す。ここで、風向θwはナセル5に設置された風向風速センサ10から検出した値に限定せず、地面や他の場所に設置された値を利用するものであってもよい。
図3の時定数算出部310を構成するデータ蓄積部302は、風向風速センサ10から検出した風向θwのデータを蓄積し、適宜蓄積した風向θwの蓄積データを出力する。なお、後述する実施例3においては、風向θwに代えて風速Vwのデータを蓄積し、適宜蓄積した風速Vwの蓄積データを出力する。本実施例では、主として風向θwの蓄積データを時定数算出に利用する。
時定数算出部310を構成するデータ分析部303は、風向θwの蓄積データに基づき、特徴データを出力する。特徴データを計算する手法として、ここでは蓄積データの周波数分析手法を用いる。
時定数算出部310を構成するデータ分析部303は、風向θwの蓄積データに基づき、特徴データを出力する。特徴データを計算する手法として、ここでは蓄積データの周波数分析手法を用いる。
図4と図5は、風向θwの蓄積データを周波数分析した結果の一例を示している。図4と図5の横軸は周波数、縦軸は周波数に基づく風向の変動量を表す風向成分θfの大きさを示している。
図4は、風向変動が比較的小さい期間の周波数分析結果の一例を示しており、風向成分θfが小さな値を示している点に特徴がある。図5は、図4よりも風向変動が比較的大きい期間の周波数分析結果の一例を示しており、風向成分θfが大きな値を示している点に特徴がある。
図4は、風向変動が比較的小さい期間の周波数分析結果の一例を示しており、風向成分θfが小さな値を示している点に特徴がある。図5は、図4よりも風向変動が比較的大きい期間の周波数分析結果の一例を示しており、風向成分θfが大きな値を示している点に特徴がある。
なお、周波数領域をどのように設定すべきかは、各風力発電装置が設置された場所の環境事情、ヨー制御部300の計算能力、平均化処理部305で用いるフィルタの設定値、ヨー旋回の駆動速度、ヨー駆動量等に応じて適宜設定すればよいが、大まかには周波数領域は10-4乃至10-0Hzの範囲とするのが好ましい。もしくは、周波数領域は10-3乃至10-1Hzの範囲とするのがさらに好ましい。
この周波数領域の範囲は、ヨー制御によって低減できるヨー偏差角Δθの周波数領域に限定している。すわなち、範囲の上限は、風向風速センサ10の構造やノイズに起因する誤差の影響が現れる高周波数成分を除去することを目的として上記の値が好ましい。また、範囲の下限は、平均化時定数Tyの値の違いによる影響が少なくなる低周波数成分を除去することを目的として上記の値が好ましい。
風向の蓄積データを周波数分析した後、得られた所定の期間における周波数成分の平均値もしくは合計値を計算し、風況の特徴データを求める。
風向の蓄積データを周波数分析した後、得られた所定の期間における周波数成分の平均値もしくは合計値を計算し、風況の特徴データを求める。
図3に示す時定数算出部310を構成する時定数計算部304は、特徴データに基づき、ヨー偏差角Δθの平均化時定数Tyを決定する。
具体的には時定数計算部304においては、風向成分θfが小さい上述の図4の傾向を示す特徴データが小さい場合と、風向成分θfが大きい上述の図5の傾向を示す特徴データが大きい場合とで、平均化時定数Tyの大きさが変更されるように調整される。例えば風向成分θfが小さい図4の場合は平均化時定数Tyを大きくし、風向成分θfが大きい図5の場合は平均化時定数Tyを小さくする。
具体的には時定数計算部304においては、風向成分θfが小さい上述の図4の傾向を示す特徴データが小さい場合と、風向成分θfが大きい上述の図5の傾向を示す特徴データが大きい場合とで、平均化時定数Tyの大きさが変更されるように調整される。例えば風向成分θfが小さい図4の場合は平均化時定数Tyを大きくし、風向成分θfが大きい図5の場合は平均化時定数Tyを小さくする。
ここで、平均化時定数Tyの調整方法の理由について説明する。平均化時定数Tyが大きい場合、平均ヨー偏差角Δθaveの変化が緩やかになるため、ヨー制御の応答性が遅くなる。その結果、長期的に見たヨー偏差角Δθが大きくなるため発電量が少なくなるが、ヨー駆動量が低減するため機械的消耗が低減する。一方、平均化時定数Tyが小さい場合、平均ヨー偏差角Δθaveの変化が速くなるため、ヨー制御の応答性が速くなる。その結果、長期的に見たヨー偏差角Δθが小さくなるため発電量が多くなるが、ヨー駆動量が増加するため機械的消耗が増加する。
このとき、風向成分θfが小さい場合、すなわち、風向変動の頻度が低い場合、平均化時定数Tyを大きくすることによる発電量の低減効果よりも機械的消耗の低減効果の方が高いため、平均化時定数Tyを大きくすることが好ましい。一方で、風向成分θfが大きい場合、すなわち、風向変動の頻度が高い場合、平均化時定数Tyを小さくすることによる機械的消耗の増加効果よりも発電量の向上効果の方が高いため、平均化時定数Tyを小さくすることが好ましい。以上が平均化時定数Tyの調整方法の理由である。
このとき、風向成分θfが小さい場合、すなわち、風向変動の頻度が低い場合、平均化時定数Tyを大きくすることによる発電量の低減効果よりも機械的消耗の低減効果の方が高いため、平均化時定数Tyを大きくすることが好ましい。一方で、風向成分θfが大きい場合、すなわち、風向変動の頻度が高い場合、平均化時定数Tyを小さくすることによる機械的消耗の増加効果よりも発電量の向上効果の方が高いため、平均化時定数Tyを小さくすることが好ましい。以上が平均化時定数Tyの調整方法の理由である。
このように本実施例では、時定数算出部310は、風向風速センサ10からの風向データを周波数分析して周波数成分を求め、所定の周波数領域の周波数成分の合計値をそれぞれの周波数領域ごとに求め、各領域の周波数成分の値に基づいて、時定数を作成している。
ここで、時定数計算部304は、平均化時定数Tyを逐次出力しなくてもよく、それぞれ任意の周期やタイミングで出力してもよい。
平均化処理部305は、ヨー偏差角Δθと平均化時定数Tyに基づき、平均ヨー偏差角Δθaveを決定する。直前の平均化時定数Tyに相当する期間のヨー偏差角Δθの平均値を計算し、それを平均ヨー偏差角Δθaveとして出力する。
また、平均化処理部305は、ローパスフィルタに代表される、ヨー偏差角Δθの所定周波数領域のみを通過させるフィルタ(ローパスフィルタ)やフーリエ変換を行うものであってもよい。
また、平均化処理部305は、ローパスフィルタに代表される、ヨー偏差角Δθの所定周波数領域のみを通過させるフィルタ(ローパスフィルタ)やフーリエ変換を行うものであってもよい。
制御指令作成部306は、平均ヨー偏差角Δθaveに基づき、ヨー制御指令Cyを決定する。平均ヨー偏差角Δθaveが大きくなった場合、ヨー旋回を開始するためのヨー制御指令Cyがヨー旋回機構8に出力される。それを受け、ヨー偏差角Δθを減らす方向にナセル5をヨー旋回させるように、ヨー旋回機構8が動作する。そして、ヨー旋回している状態で、平均ヨー偏差角Δθaveが大きくなった場合、ヨー旋回を停止するためのヨー制御指令Cyがヨー旋回機構8に出力される。
図6は、図3に示すヨー制御部300の処理概要を示すフローチャートである。
図6に示すように、ステップS601では、ヨー偏差角計算部301がロータ軸角度θrを決定し、次のステップS602に進む。ステップS602では、ヨー偏差角計算部301が風向θwを決定し、次のステップS603に進む。ステップS603では、ヨー偏差角計算部301がロータ軸角度θrと風向θwに基づいてヨー偏差角Δθを決定し、次のステップS604に進む。このように、ステップS601からステップS603までの処理をヨー偏差角計算部301が実行する。
図6に示すように、ステップS601では、ヨー偏差角計算部301がロータ軸角度θrを決定し、次のステップS602に進む。ステップS602では、ヨー偏差角計算部301が風向θwを決定し、次のステップS603に進む。ステップS603では、ヨー偏差角計算部301がロータ軸角度θrと風向θwに基づいてヨー偏差角Δθを決定し、次のステップS604に進む。このように、ステップS601からステップS603までの処理をヨー偏差角計算部301が実行する。
ステップS604では、時定数算出部310を構成するデータ蓄積部302が時刻に対応する風向θwの値を蓄積し、次のステップS605に進む。ステップS605では、時定数算出部310を構成するデータ分析部303が蓄積データに基づいて特徴データを決定し、次のステップS606に進む。ステップS606では、時定数算出部310を構成する時定数計算部304が平均化時定数Tyを決定し、次のステップS607に進む。このようにステップS604からステップS606までの処理を時定数算出部310が実行する。
ステップS607では、平均化処理部305が、ヨー偏差角計算部301より入力されるヨー偏差角Δθと、時定数算出部310より入力される平均化時定数Tyに基づいて平均ヨー偏差角Δθaveを決定し、次のステップS608に進む。ステップS608では、制御指令作成部306が平均ヨー偏差角Δθaveに基づいてヨー制御指令Cyを決定した後、一連の処理を終了する。
次に、本実施例の効果を明確化するため、比較例の動作と合わせて概要を説明する。
図7は、実施例1に係るヨー制御部300の効果を示す概要図であり、横軸は全て共通の時刻を示す。図7の上段における縦軸はロータ軸角度θrと風向θw、図7の中段における縦軸はヨー偏差角Δθ、および、図7の下段における縦軸は発電出力Peを示す。図7における破線は、本実施例に係るヨー制御部300を適用しない場合の比較例として、例えば、平均化時定数Tyが常に大きい場合の結果を示す。一方で、実線が本実施例に係るヨー制御部300を適用した場合の結果を示している。
図7は、実施例1に係るヨー制御部300の効果を示す概要図であり、横軸は全て共通の時刻を示す。図7の上段における縦軸はロータ軸角度θrと風向θw、図7の中段における縦軸はヨー偏差角Δθ、および、図7の下段における縦軸は発電出力Peを示す。図7における破線は、本実施例に係るヨー制御部300を適用しない場合の比較例として、例えば、平均化時定数Tyが常に大きい場合の結果を示す。一方で、実線が本実施例に係るヨー制御部300を適用した場合の結果を示している。
なお図7の比較結果を算定するに当たり、風況条件として、風向変動がある程度速い周期で頻発する場合を想定した。すなわち、上述の図5に示すように、中周波数領域の風向成分θfが多い状況である。したがって、本実施例の平均化時定数Tyは比較例より小さい値をとる。
図7の上段に示されるように、風向θwは小さい変動を繰り返しつつ、+側に大きく変動した後、すぐに-側に大きく変動している。このとき、本実施例では時刻T1でヨー旋回を開始してロータ軸角度θrが風向θwに追従しているのに対し、比較例では時刻T2でヨー旋回を開始する。したがって、ヨー旋回している間、本実施例は比較例よりも風向θwへの追従性が良いため、図7の中段に示すように、時刻T1から時刻T3までの期間のヨー偏差角Δθは、比較例よりも本実施例の方が小さい。そのため、図7の下段に示すように、この期間(時刻T1から時刻T3までの期間)の発電出力Peは、本実施例の方が比較例よりも大きくなる。すなわち、本実施例は、年間発電量が比較例よりも高くなることを示している。
また、図7の上段に示すように、本実施例では時刻T3でヨー旋回を停止し、比較例では時刻T4でヨー旋回を停止している。このとき、ロータ軸角度θrが風向θwと交差してからヨー旋回を停止するまでの時間は、本実施例の方が比較例よりも短い。
さらに、図7の上段に示すように、風向θwが+側から-側に大きく変動するとき、本実施例では時刻T4でヨー旋回を開始し、比較例では時刻T5でヨー旋回を開始している。このとき、時刻T2のときよりも、比較例ではヨー旋回の開始が風向θwの変動に対し遅れている。したがって、図7の中段に示すように、時刻T4から時刻T6までの期間のヨー偏差角Δθは、比較例よりも本実施例の方が小さい。そのため、図7の下段に示すように、この期間(時刻T4から時刻T6までの期間)の発電出力Peも本実施例の方が比較例よりも大きくなる。
さらに、図7の上段に示すように、風向θwが+側から-側に大きく変動するとき、本実施例では時刻T4でヨー旋回を開始し、比較例では時刻T5でヨー旋回を開始している。このとき、時刻T2のときよりも、比較例ではヨー旋回の開始が風向θwの変動に対し遅れている。したがって、図7の中段に示すように、時刻T4から時刻T6までの期間のヨー偏差角Δθは、比較例よりも本実施例の方が小さい。そのため、図7の下段に示すように、この期間(時刻T4から時刻T6までの期間)の発電出力Peも本実施例の方が比較例よりも大きくなる。
以上のように、本実施例によれば、ヨー偏差角を低減して発電量を向上しつつ、且つ、ヨー駆動量を抑制して機械的消耗を抑制し得る風力発電装置とその制御方法を提供することが可能となる。具体的には、風向変動が激しいときは、平均化時定数Tyを小さくすることで発電量を向上させる。また、風向変動が激しくないときは、平均化時定数Tyを大きくして機械的消耗を低減させる。したがって、場所や時間により風向変動の大きさや周期が異なる場合に、風力発電装置の発電性能の向上と、機械的消耗の低減とを両立させることができる。
また本実施例によれば、ヨー偏差角Δθを小さくすることで、風力発電装置に横または斜めから加わる風荷重が小さくなるため、風力発電装置の破損の抑制や機械的寿命の延伸にも効果がある。
また本実施例によれば、ヨー偏差角Δθを小さくすることで、風力発電装置に横または斜めから加わる風荷重が小さくなるため、風力発電装置の破損の抑制や機械的寿命の延伸にも効果がある。
それに加え、風力発電装置に過大な荷重がかからないようにすることを目的とし、ヨー偏差角Δθが過大になった場合、直ちに発電を抑制あるいは中止する機能が風力発電装置に備えられていることがある。本実施例は上述の比較例よりもヨー旋回を開始するタイミングが早く、風向θwへの追従性が良いためヨー偏差角Δθが過大になりにくい。したがって、ヨー偏差角Δθが過大になって発電が抑制または中止される機会が減るため、発電量の向上に効果がある。
なお、時定数計算部304は、複数の周波数領域ごとに少なくともヨー旋回開始、及び/又は、ヨー旋回停止判定用の平均化時定数Tyを設定し、時定数を可変にし、風向により制御を切り替えることもできる。具体的には、風向データの周波数分析結果に基づいて、複数の所定の周波数領域に対して、少なくとも、上記ヨー旋回開始用の平均化時定数、及び/又は、上記ヨー旋回停止判定用の平均化時定数を作成しておく。平均化処理部は、上記ヨー旋回開始用の平均化時定数、及び/又は、上記ヨー旋回停止判定用の平均化時定数に基づいて、ヨー旋回開始判定とヨー旋回停止判定に使用する平均ヨー偏差角を作成する。制御指令作成部306は、ヨー旋回開始とヨー旋回停止で平均ヨー偏差角を切り替えて、ヨー制御指令Cyを作成する。
図8は、本発明の他の実施例に係る実施例2のヨー制御部の機能を示すブロック線図である。本実施例では、平均化時定数Tyが過去の経験若しくは計算により求めた値を固定設定値として予め制御装置9に設定されオフラインで運用する点が、上述の実施例1と異なる。その他の構成は上述の実施例1と同様である。また、図8では実施例1と同様の構成要素に同一符号を付している。
上述の実施例1では、図3および図6に示したように、時定数算出部310が毎制御周期、或は適宜のタイミングで平均化時定数Tyを算出し更新する構成とした。これに対し、図8に示す本実施例のヨー制御部800は、ヨー偏差角Δθを求めるヨー偏差角計算部301と、ヨー偏差角Δθを平均化処理して平均ヨー偏差角Δθaveを求める平均化処理部305と、平均ヨー偏差角Δθaveに基づいてヨー旋回の開始/停止を制御するヨー制御指令Cyを定める制御指令作成部306により構成されており、平均ヨー偏差角Δθaveを算出する時定数算出部310を備えていない。平均化処理部305に与えられる平均化時定数Tyは、予めヨー制御部800を構成する平均化処理部305にプリセットされ、あるいは適宜のタイミングで時定数入力部807により外部から設定される。時定数入力部807はキーボード等の入力装置であって、作業員により入力されてもよい。
上述の実施例1に示した時定数算出部310の機能は、風力発電所とは別の場所に設けられた解析装置内に構成されており、例えば風力発電所建設前の研究、設計段階において求めた環境条件から、予め当該風力発電所の典型的な風況での平均化時定数Tyを算出し、ヨー制御部800内にプリセット値として組み込んでおくものである。典型的な風況とは、例えば季節ごとに、あるいは夕方とか朝方とか毎に準備され、適宜の条件で切り替え使用してもよい。
あるいは、上述の実施例1に示した時定数算出部310の機能は、風力発電所とは別の場所に設けられた解析装置内に構成されており、例えば風力発電所を設置後の運用段階において、観測した環境条件から、当該風力発電所の典型的な風況での平均化時定数Tyを算出し、通信部を備えた時定数入力部807を介してヨー制御部800内の平均化処理部305に与えるものである。この場合に、平均化時定数Tyの設定は、現場の風況に応じてオンライン的に即時に対応する形式のものではなく、オフラインで求めておいた値を適宜のタイミングで与えて運用する。
以上のように本実施例によれば、風車に解析装置を設ける必要が無く、既存の風車に対して大きな改修なく本発明制御を搭載するように更新でき、最適化された時定数に基づく制御を行うことができる。
図9は、本発明の他の実施例に係る実施例3のヨー制御部の機能を示すブロック線図である。本実施例では、ヨー制御部900の時定数算出部910を構成するデータ蓄積部902が、風向θwに代えて風速Vwのデータを蓄積する点が実施例1と異なる。その他の構成は上述の実施例1と同様である。また、図8では実施例1と同様の構成要素に同一符号を付している。
図9に示すように、ヨー制御部900は、ヨー偏差角Δθを求めるヨー偏差角計算部301と、ヨー偏差角Δθの平均化時定数Tyを算出する時定数算出部910と、ヨー偏差角Δθを平均化処理して平均ヨー偏差角Δθaveを求める平均化処理部305と、平均ヨー偏差角Δθaveに基づいてヨー旋回の開始/停止を制御するヨー制御指令Cyを定める制御指令作成部306により構成されている。時定数算出部910は、データ蓄積部902、データ分析部903、時定数計算部904により構成されている。
本実施例のヨー制御部900において、ヨー偏差角計算部301、平均化処理部305、および制御指令作成部306は実施例1と同様であるが、時定数算出部910を構成するデータ蓄積部902の入力が風速Vwである点が実施例1と異なる。
時定数算出部910を構成するデータ蓄積部902は、風向風速センサ10から検出した風速Vwに基づき、風速Vwの蓄積データを出力する。なお、ここで計測した風速Vwはナセル5に固定された風向風速センサ10から検出したものであり、その時点でナセル5が向いている方向での風速である。
時定数算出部910を構成するデータ分析部903は、風速Vwの蓄積データに基づき、特徴データを出力する。この場合の特徴データは、所定の期間における乱流強度Irefである。乱流強度Irefは、所定の期間における風速の標準偏差Vvと、風速の平均値Vaveの比率により求められる。すなわち、データ分析部903は、以下の式(1)を演算することで、乱流強度Irefを特徴データとして出力する。
Iref=Vv/Vave ・・・(1)
時定数算出部910を構成する時定数計算部904は、特徴データである乱流強度Irefに基づき、平均化時定数Tyを決定する。ここで、風況が激しいとき、すなわち、乱流強度Irefが高い場合、平均化時定数Tyを小さくする。また、風況が穏やかなとき、すなわち、乱流強度Irefが低い場合、平均化時定数Tyを大きくする。
これは、上述の実施例1における風向θwの周波数成分の平均値および合計値と、本実施例における乱流強度Irefには正の相関があり、風向変動が激しい場合は乱流強度Irefが大きく、風向変動が穏やかな場合は乱流強度Irefが小さくなるためである。
Iref=Vv/Vave ・・・(1)
時定数算出部910を構成する時定数計算部904は、特徴データである乱流強度Irefに基づき、平均化時定数Tyを決定する。ここで、風況が激しいとき、すなわち、乱流強度Irefが高い場合、平均化時定数Tyを小さくする。また、風況が穏やかなとき、すなわち、乱流強度Irefが低い場合、平均化時定数Tyを大きくする。
これは、上述の実施例1における風向θwの周波数成分の平均値および合計値と、本実施例における乱流強度Irefには正の相関があり、風向変動が激しい場合は乱流強度Irefが大きく、風向変動が穏やかな場合は乱流強度Irefが小さくなるためである。
以上のように本実施例によれば、ヨー制御部900の処理を適用することで、実施例1と同様の効果をより簡便な処理で実現することができる。
次に、本発明の他の実施例に係る実施例4の風力発電装置1について説明する。
本実施例の風力発電装置1は、上述の実施例1のヨー制御部300と同じ構成を有しているが、データ分析部303と時定数計算部304とにおける処理が実施例1と異なる。
本実施例の風力発電装置1は、上述の実施例1のヨー制御部300と同じ構成を有しているが、データ分析部303と時定数計算部304とにおける処理が実施例1と異なる。
本実施例の時定数算出部310を構成するデータ分析部303では、風向θwに基づいて、統計分析により所定の期間における風向θwの標準偏差σを計算し、風況の特徴データとして出力する。
時定数算出部310を構成する時定数計算部304は、特徴データである標準偏差σに基づいて、ヨー制御の平均化時定数Tyを決定する。ここで、風向θw標準偏差σが比較的大きい場合は、平均化時定数Tyを小さくする。風向θwの標準偏差σが比較的小さい場合は、平均化時定数Tyを小さくする。
これは、実施例1における風向θwの周波数成分の平均値および合計値と、本実施例における風向θwの標準偏差σには正の相関があり、風向変動が激しい場合は風向θwの標準偏差σが大きく、風向変動が穏やかな場合は風向θwの標準偏差σが小さくなるためである。
時定数算出部310を構成する時定数計算部304は、特徴データである標準偏差σに基づいて、ヨー制御の平均化時定数Tyを決定する。ここで、風向θw標準偏差σが比較的大きい場合は、平均化時定数Tyを小さくする。風向θwの標準偏差σが比較的小さい場合は、平均化時定数Tyを小さくする。
これは、実施例1における風向θwの周波数成分の平均値および合計値と、本実施例における風向θwの標準偏差σには正の相関があり、風向変動が激しい場合は風向θwの標準偏差σが大きく、風向変動が穏やかな場合は風向θwの標準偏差σが小さくなるためである。
以上のように、本実施例によれば、実施例1と同様の効果をより簡便な処理で実現することが可能となる。
図10は、本発明の他の実施例に係る実施例5のヨー制御部の機能を示すブロック線図である。本実施例では、ヨー制御部1000の時定数算出部1010を構成するデータ蓄積部1002が、風向θwに加え風速Vwのデータを蓄積する点が実施例1と異なる。その他の構成は上述の実施例1と同様である。また、図10では実施例1と同様の構成要素に同一符号を付している。
図10に示すように、ヨー制御部1000は、ヨー偏差角Δθを求めるヨー偏差角計算部301と、ヨー偏差角Δθの平均化時定数Tyを算出する時定数算出部1010と、ヨー偏差角Δθを平均化処理して平均ヨー偏差角Δθaveを求める平均化処理部305と、平均ヨー偏差角Δθaveに基づいてヨー旋回の開始/停止を制御するヨー制御指令Cyを定める制御指令作成部306により構成されている。時定数算出部1010は、データ蓄積部1002、データ分析部1003、時定数計算部1004により構成されている。
本実施例のヨー制御部1000において、ヨー偏差角計算部301、平均化処理部305、および制御指令作成部306は実施例1と同様であるが、時定数算出部1010を構成するデータ蓄積部1002の入力に風速Vwを加えている点が実施例1と異なる。
時定数算出部1010を構成するデータ蓄積部1002は、風向風速センサ10から検出した風向θwと風速Vwに基づき、風向θwと風速Vwの蓄積データを出力する。なお、ここで計測した風速Vwはナセル5に固定された風向風速センサ10から検出したものであり、その時点でナセル5が向いている方向での風速である。
時定数算出部1010を構成するデータ蓄積部1002は、風向風速センサ10から検出した風向θwと風速Vwに基づき、風向θwと風速Vwの蓄積データを出力する。なお、ここで計測した風速Vwはナセル5に固定された風向風速センサ10から検出したものであり、その時点でナセル5が向いている方向での風速である。
時定数算出部1010を構成するデータ分析部1003は、風向θwの蓄積データに基づき、特徴データを出力する。また、風速Vwの蓄積データに基づき、所定の期間における平均風速Vwaveを出力する。
時定数算出部1010を構成する時定数計算部1004は、実施例1と同様に、特徴データに基づき、平均化時定数Tyを決定するが、平均風速Vwaveが低く発電していないとき、及び/又は、平均風速Vwaveが高く定格出力に達している場合、平均化時定数Tyを大きな値とする。これは、平均風速Vwaveが低く発電していない場合、および平均風速Vwaveが高く定格出力に達している場合は、平均化時定数Tyを小さくして風向θwに対するナセル方位角の追従性を高くすると、発電量は向上しない若しくは向上が少ないのに対し、ヨー駆動量が増加することで機械的消耗が増加するためである。
時定数算出部1010を構成する時定数計算部1004は、実施例1と同様に、特徴データに基づき、平均化時定数Tyを決定するが、平均風速Vwaveが低く発電していないとき、及び/又は、平均風速Vwaveが高く定格出力に達している場合、平均化時定数Tyを大きな値とする。これは、平均風速Vwaveが低く発電していない場合、および平均風速Vwaveが高く定格出力に達している場合は、平均化時定数Tyを小さくして風向θwに対するナセル方位角の追従性を高くすると、発電量は向上しない若しくは向上が少ないのに対し、ヨー駆動量が増加することで機械的消耗が増加するためである。
以上のように本実施例によれば、実施例1と同程度に発電量を向上させるとともに、実施例1よりも機械的消耗を低減することが可能となる。
本発明は上述した実施例に限定されるものではなく、種々の変形が可能である。上述した実施例は本発明を理解しやすく説明するために例示したものであり、必ずしも説明した全ての構成を備えるものに限定されるものではない。また、ある実施例の構成の一部を他の実施例の構成に置き換えることが可能であり、また、ある実施例の構成に他の実施例の構成を加えることも可能である。また、図中に示した制御線や情報線は説明上必要と考えられるものを示しており、製品上で必要な全ての制御線や情報線を示しているとは限らない。実際にはほとんど全ての構成が相互に接続されていると考えてもよい。
上述の実施例に対して可能な変形として、例えば以下のようなものが挙げられる。
(1)ヨー制御部300、800、900、1000におけるデータ蓄積部302、データ分析部303、および時定数計算部304は、制御装置9に代えて、外部の装置に備えてもよい。
(2)上述の実施例にて計算したヨー制御の平均化時定数Tyは、同じサイトにおける他の風力発電装置1や、風況の近しい他サイトの風力発電装置1に適用してもよい。
(3)ヨー制御部300、800、900、1000におけるデータ蓄積部302は、風向θwをはじめとする風況データを逐次入力することなく、過去に蓄積された風況データのみを保持する構成としてもよい。
(4)上述の各実施例においては、風向風速センサ10はナセル5上に設置されているが、この場所に代えて、ナセル5内や風力発電装置1の周辺に設置してもよい。
(1)ヨー制御部300、800、900、1000におけるデータ蓄積部302、データ分析部303、および時定数計算部304は、制御装置9に代えて、外部の装置に備えてもよい。
(2)上述の実施例にて計算したヨー制御の平均化時定数Tyは、同じサイトにおける他の風力発電装置1や、風況の近しい他サイトの風力発電装置1に適用してもよい。
(3)ヨー制御部300、800、900、1000におけるデータ蓄積部302は、風向θwをはじめとする風況データを逐次入力することなく、過去に蓄積された風況データのみを保持する構成としてもよい。
(4)上述の各実施例においては、風向風速センサ10はナセル5上に設置されているが、この場所に代えて、ナセル5内や風力発電装置1の周辺に設置してもよい。
1…風力発電装置
2…ブレード
3…ハブ
4…ロータ
5…ナセル
6…発電機
7…タワー
8…ヨー旋回機構
9…制御装置
10…風向風速センサ
300,800,900,1000…ヨー制御部
301…ヨー偏差角計算部
302,902,1002…データ蓄積部
303,903,1003…データ分析部
304,904,1004…時定数計算部
305…平均化処理部
306…制御指令作成部
310,910,1010…時定数算出部
807…時定数入力部
2…ブレード
3…ハブ
4…ロータ
5…ナセル
6…発電機
7…タワー
8…ヨー旋回機構
9…制御装置
10…風向風速センサ
300,800,900,1000…ヨー制御部
301…ヨー偏差角計算部
302,902,1002…データ蓄積部
303,903,1003…データ分析部
304,904,1004…時定数計算部
305…平均化処理部
306…制御指令作成部
310,910,1010…時定数算出部
807…時定数入力部
Claims (13)
- 風を受けて回転するロータと、前記ロータを回転可能に支持するナセルと、前記ナセルをヨー旋回可能に支持するタワーと、ヨー制御指令に基づいて前記ナセルのヨーを調整する調整装置と、前記調整装置に送る前記ヨー制御指令を定める制御装置とを備える風力発電装置であって、
前記制御装置は、風向風速測定部により測定された風向と前記ロータの方向からヨー偏差角を算出するヨー偏差角計算部と、前記ヨー偏差角を所定の期間で平均化する平均化処理部と、平均ヨー偏差角に基づき前記ヨー制御指令を定める制御指令作成部を備え、
前記平均化処理部は、風況の乱れ度が高い場合、平均化時定数を小さくし、前記ヨー偏差角に対してヨー旋回を開始及び/又はヨー旋回の停止のタイミングを速くすることを特徴とする風力発電装置。 - 請求項1に記載の風力発電装置において、
前記平均化時定数は、予め前記平均化処理部に設定されていることを特徴とする風力発電装置。 - 請求項1に記載の風力発電装置において、
前記平均化時定数は、通信部を介して風力発電装置の外部から設定されることを特徴とする風力発電装置。 - 請求項1に記載の風力発電装置において、
前記制御装置は、少なくともヨー制御開始及び/又はヨー制御終了の判定に用いる前記平均ヨー偏差角を求めるための平均化時定数を算出する時定数算出部を備えることを特徴とする風力発電装置。 - 請求項4に記載の風力発電装置において、
前記時定数算出部は、前記風向風速測定部により測定された風向を周波数分析し周波数成分を求め、所定の周波数領域の前記周波数成分の値に基づいて、少なくともヨー制御開始及び/又はヨー制御終了の判定に用いる前記平均ヨー偏差角を求めるための平均化時定数を算出することを特徴とする風力発電装置。 - 請求項4に記載の風力発電装置において、
前記時定数算出部は、前記風向風速測定部により測定された風速から所定の期間における風速の標準偏差及び風速の平均値を求め、前記風速の標準偏差を前記風速の平均値にて除することにより求まる乱流強度に基づいて、少なくともヨー制御開始及び/又はヨー制御終了の判定に用いる前記平均ヨー偏差角を求めるための平均化時定数を算出することを特徴とする風力発電装置。 - 請求項4に記載の風力発電装置において、
前記時定数算出部は、前記風向風速測定部により測定された風向から風向の標準偏差を求め、前記風向の標準偏差に基づいて、少なくともヨー制御開始及び/又はヨー制御終了の判定に用いる前記平均ヨー偏差角を求めるための平均化時定数を算出することを特徴とする風力発電装置。 - 請求項5に記載の風力発電装置において、
前記時定数算出部は、周波数分析のためにローパスフィルタ若しくはフーリエ変換のいずれかを用いることを特徴とする風力発電装置。 - 風を受けて回転するロータと、前記ロータを回転可能に支持するナセルと、前記ナセルをヨー旋回可能に支持するタワーと、ヨー制御指令に基づいて前記ナセルのヨーを調整する調整装置と、前記調整装置に送る前記ヨー制御指令を定める制御装置とを備える風力発電装置の制御方法であって、
測定された風向と前記ロータの方向からヨー偏差角を算出し、
前記ヨー偏差角を所定の期間で平均化し平均ヨー偏差角を求め、
風況の乱れ度が高い場合、平均化時定数を小さくし、前記ヨー偏差角に対してヨー旋回を開始及び/又はヨー旋回の停止のタイミングを速くすることを特徴とする風力発電装置の制御方法。 - 請求項9に記載の風力発電装置の制御方法において、
少なくともヨー制御開始及び/又はヨー制御終了の判定に用いる前記平均ヨー偏差角を求めるための平均化時定数を算出することを特徴とする風力発電装置の制御方法。 - 請求項10に記載の風力発電装置の制御方法において、
前記測定された風向を周波数分析し周波数成分を求め、所定の周波数領域の前記周波数成分の値に基づいて、少なくともヨー制御開始及び/又はヨー制御終了の判定に用いる前記平均ヨー偏差角を求めるための平均化時定数を算出することを特徴とする風力発電装置の制御方法。 - 請求項10に記載の風力発電装置の制御方法において、
測定された風速から所定の期間における風速の標準偏差及び風速の平均値を求め、前記風速の標準偏差を前記風速の平均値にて除することにより求まる乱流強度に基づいて、少なくともヨー制御開始及び/又はヨー制御終了の判定に用いる前記平均ヨー偏差角を求めるための平均化時定数を算出することを特徴とする風力発電装置の制御方法。 - 請求項10に記載の風力発電装置の制御方法において、
前記測定された風向から風向の標準偏差を求め、前記風向の標準偏差に基づいて、少なくともヨー制御開始及び/又はヨー制御終了の判定に用いる前記平均ヨー偏差角を求めるための平均化時定数を算出することを特徴とする風力発電装置の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP19757931.1A EP3757385A4 (en) | 2018-02-23 | 2019-01-15 | WIND ENERGY PRODUCTION DEVICE AND CONTROL PROCEDURE FOR THIS DEVICE |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018-030556 | 2018-02-23 | ||
| JP2018030556A JP2019143583A (ja) | 2018-02-23 | 2018-02-23 | 風力発電装置とその制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019163325A1 true WO2019163325A1 (ja) | 2019-08-29 |
Family
ID=67687610
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/000829 WO2019163325A1 (ja) | 2018-02-23 | 2019-01-15 | 風力発電装置とその制御方法 |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP3757385A4 (ja) |
| JP (1) | JP2019143583A (ja) |
| TW (1) | TWI688708B (ja) |
| WO (1) | WO2019163325A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111489063A (zh) * | 2020-03-25 | 2020-08-04 | 北京师范大学 | 一种评估风力发电机对周边环境影响的方法及系统 |
| WO2022142210A1 (zh) * | 2020-12-29 | 2022-07-07 | 北京金风科创风电设备有限公司 | 风力发电机组的起停机异常识别方法及装置 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6997049B2 (ja) | 2018-07-30 | 2022-01-17 | 株式会社日立製作所 | 風力発電装置とその制御方法 |
| EP4080042A1 (en) * | 2021-04-21 | 2022-10-26 | General Electric Renovables España S.L. | Yaw systems and methods |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010106727A (ja) | 2008-10-29 | 2010-05-13 | Mitsubishi Heavy Ind Ltd | 風力発電装置及びその制御方法 |
| US20140152013A1 (en) | 2011-07-04 | 2014-06-05 | Vestas Wind Systems A/S | Method of yawing a rotor of a wind turbine |
| US9273668B2 (en) | 2009-03-05 | 2016-03-01 | General Electric Company | Yaw system for a windmill |
| JP2017089575A (ja) * | 2015-11-16 | 2017-05-25 | 株式会社日立製作所 | 風力発電システム |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4939286B2 (ja) * | 2007-04-10 | 2012-05-23 | 三菱重工業株式会社 | 風力発電装置及びその制御方法 |
| JP5022102B2 (ja) * | 2007-05-25 | 2012-09-12 | 三菱重工業株式会社 | 風力発電装置、風力発電システムおよび風力発電装置の発電制御方法 |
| JP6637793B2 (ja) * | 2016-03-04 | 2020-01-29 | 株式会社日立製作所 | 複数の風力発電装置の制御装置、ウィンドファームまたは複数の風力発電装置の制御方法 |
| CN106704104B (zh) * | 2017-01-20 | 2019-08-23 | 锐电科技有限公司 | 一种提高大风偏差下风力发电机组净空的方法及其系统 |
-
2018
- 2018-02-23 JP JP2018030556A patent/JP2019143583A/ja active Pending
-
2019
- 2019-01-15 WO PCT/JP2019/000829 patent/WO2019163325A1/ja unknown
- 2019-01-15 EP EP19757931.1A patent/EP3757385A4/en not_active Withdrawn
- 2019-02-19 TW TW108105369A patent/TWI688708B/zh active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010106727A (ja) | 2008-10-29 | 2010-05-13 | Mitsubishi Heavy Ind Ltd | 風力発電装置及びその制御方法 |
| US9273668B2 (en) | 2009-03-05 | 2016-03-01 | General Electric Company | Yaw system for a windmill |
| US20140152013A1 (en) | 2011-07-04 | 2014-06-05 | Vestas Wind Systems A/S | Method of yawing a rotor of a wind turbine |
| JP2017089575A (ja) * | 2015-11-16 | 2017-05-25 | 株式会社日立製作所 | 風力発電システム |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3757385A4 * |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111489063A (zh) * | 2020-03-25 | 2020-08-04 | 北京师范大学 | 一种评估风力发电机对周边环境影响的方法及系统 |
| CN111489063B (zh) * | 2020-03-25 | 2022-03-22 | 北京师范大学 | 一种评估风力发电机对周边环境影响的方法及系统 |
| WO2022142210A1 (zh) * | 2020-12-29 | 2022-07-07 | 北京金风科创风电设备有限公司 | 风力发电机组的起停机异常识别方法及装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| TWI688708B (zh) | 2020-03-21 |
| TW201937057A (zh) | 2019-09-16 |
| EP3757385A4 (en) | 2021-10-27 |
| EP3757385A1 (en) | 2020-12-30 |
| JP2019143583A (ja) | 2019-08-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2019163325A1 (ja) | 風力発電装置とその制御方法 | |
| US8128362B2 (en) | Method of operating a wind turbine, a wind turbine and a cluster of wind turbines | |
| JP5006186B2 (ja) | 風力発電所の軸方向の動力変化を減少させる方法 | |
| US9476407B2 (en) | Method of operating a wind turbine | |
| CN108533451B (zh) | 一种风力发电机组的变桨控制方法 | |
| US8133023B2 (en) | Wind turbine with variable area propeller blades | |
| US20140030090A1 (en) | Systems and methods for controlling tower clearance in a wind turbine | |
| EP3724489B1 (en) | Tower damping in wind turbine power production | |
| JP2012154335A (ja) | ピッチ角オフセット信号を決定するための、および、速度回避制御のための風力タービンロータのロータ周波数を制御するための方法およびシステム | |
| EP3724488B1 (en) | Tower damping during power production of a wind turbine | |
| WO2012136663A1 (en) | Method and controller for generating a blade pitch angle control signal and wind turbine comprising the controller | |
| EP3064770B1 (en) | Wind turbine power generation facility and method of controlling the same | |
| WO2019163326A1 (ja) | 風力発電装置とその制御方法 | |
| TWI661124B (zh) | 風力發電裝置及其之控制方法以及修改方法 | |
| EP3404257B1 (en) | System and method for controlling a pitch angle of a wind turbine rotor blade | |
| JP5550501B2 (ja) | 水平軸風車 | |
| JP2019065862A (ja) | 風力発電装置と、その制御装置、並びにその制御方法 | |
| JP6997049B2 (ja) | 風力発電装置とその制御方法 | |
| JP2020193565A (ja) | 風力発電装置とその制御方法 | |
| US20220018331A1 (en) | Method for operating a wind turbine, wind turbine, and computer program product | |
| JP2022065271A (ja) | 風力発電装置とその制御方法 | |
| DK201570260A1 (en) | Over-speeding a rotor to maintain turbine output power |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19757931 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2019757931 Country of ref document: EP Effective date: 20200923 |