WO2019151116A1 - 情報処理装置 - Google Patents
情報処理装置 Download PDFInfo
- Publication number
- WO2019151116A1 WO2019151116A1 PCT/JP2019/002334 JP2019002334W WO2019151116A1 WO 2019151116 A1 WO2019151116 A1 WO 2019151116A1 JP 2019002334 W JP2019002334 W JP 2019002334W WO 2019151116 A1 WO2019151116 A1 WO 2019151116A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- target
- captured image
- distance
- gate
- information processing
- Prior art date
Links
- 230000010365 information processing Effects 0.000 title claims abstract description 95
- 238000000034 method Methods 0.000 claims abstract description 61
- 238000012545 processing Methods 0.000 claims description 45
- 238000003384 imaging method Methods 0.000 claims description 27
- 238000003672 processing method Methods 0.000 claims description 25
- 238000012795 verification Methods 0.000 claims description 19
- 238000004458 analytical method Methods 0.000 claims description 13
- 238000010586 diagram Methods 0.000 description 14
- 238000013500 data storage Methods 0.000 description 10
- 239000000284 extract Substances 0.000 description 6
- 238000005259 measurement Methods 0.000 description 6
- 238000004891 communication Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000013307 optical fiber Substances 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
Images






Classifications
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07C—TIME OR ATTENDANCE REGISTERS; REGISTERING OR INDICATING THE WORKING OF MACHINES; GENERATING RANDOM NUMBERS; VOTING OR LOTTERY APPARATUS; ARRANGEMENTS, SYSTEMS OR APPARATUS FOR CHECKING NOT PROVIDED FOR ELSEWHERE
- G07C9/00—Individual registration on entry or exit
- G07C9/10—Movable barriers with registering means
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05B—LOCKS; ACCESSORIES THEREFOR; HANDCUFFS
- E05B49/00—Electric permutation locks; Circuits therefor ; Mechanical aspects of electronic locks; Mechanical keys therefor
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/70—Power-operated mechanisms for wings with automatic actuation
- E05F15/73—Power-operated mechanisms for wings with automatic actuation responsive to movement or presence of persons or objects
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/22—Matching criteria, e.g. proximity measures
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/60—Analysis of geometric attributes
- G06T7/62—Analysis of geometric attributes of area, perimeter, diameter or volume
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/52—Surveillance or monitoring of activities, e.g. for recognising suspicious objects
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/16—Human faces, e.g. facial parts, sketches or expressions
- G06V40/172—Classification, e.g. identification
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07C—TIME OR ATTENDANCE REGISTERS; REGISTERING OR INDICATING THE WORKING OF MACHINES; GENERATING RANDOM NUMBERS; VOTING OR LOTTERY APPARATUS; ARRANGEMENTS, SYSTEMS OR APPARATUS FOR CHECKING NOT PROVIDED FOR ELSEWHERE
- G07C9/00—Individual registration on entry or exit
- G07C9/30—Individual registration on entry or exit not involving the use of a pass
- G07C9/32—Individual registration on entry or exit not involving the use of a pass in combination with an identity check
- G07C9/37—Individual registration on entry or exit not involving the use of a pass in combination with an identity check using biometric data, e.g. fingerprints, iris scans or voice recognition
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/70—Power-operated mechanisms for wings with automatic actuation
- E05F15/73—Power-operated mechanisms for wings with automatic actuation responsive to movement or presence of persons or objects
- E05F2015/767—Power-operated mechanisms for wings with automatic actuation responsive to movement or presence of persons or objects using cameras
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME ASSOCIATED WITH SUBCLASSES E05D AND E05F, RELATING TO CONSTRUCTION ELEMENTS, ELECTRIC CONTROL, POWER SUPPLY, POWER SIGNAL OR TRANSMISSION, USER INTERFACES, MOUNTING OR COUPLING, DETAILS, ACCESSORIES, AUXILIARY OPERATIONS NOT OTHERWISE PROVIDED FOR, APPLICATION THEREOF
- E05Y2400/00—Electronic control; Electrical power; Power supply; Power or signal transmission; User interfaces
- E05Y2400/10—Electronic control
- E05Y2400/45—Control modes
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME ASSOCIATED WITH SUBCLASSES E05D AND E05F, RELATING TO CONSTRUCTION ELEMENTS, ELECTRIC CONTROL, POWER SUPPLY, POWER SIGNAL OR TRANSMISSION, USER INTERFACES, MOUNTING OR COUPLING, DETAILS, ACCESSORIES, AUXILIARY OPERATIONS NOT OTHERWISE PROVIDED FOR, APPLICATION THEREOF
- E05Y2900/00—Application of doors, windows, wings or fittings thereof
- E05Y2900/40—Application of doors, windows, wings or fittings thereof for gates
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30232—Surveillance
Definitions
- An imaging means for acquiring a photographed image obtained by photographing a pre-passage area with respect to the gate; Collating means for performing collation processing between the object in the captured image and the object registered in advance; Distance estimation means for estimating a distance from the gate to the target in the captured image using a reference value set based on the attribute of the target in the captured image; Gate control means for controlling the opening and closing of the gate based on the collation result and the estimated distance to the target in the captured image; Information processing system with
- (Appendix 12) Perform the matching process between the object in the captured image that captured the area before passing through the gate and the object registered in advance. Measure the distance to the target in the captured image using a reference value set based on the attribute of the target in the captured image; Controlling the opening and closing of the gate based on the collation result and the estimated distance to the target in the captured image; Information processing method.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Multimedia (AREA)
- Human Computer Interaction (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Data Mining & Analysis (AREA)
- Geometry (AREA)
- Life Sciences & Earth Sciences (AREA)
- Bioinformatics & Computational Biology (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Evolutionary Biology (AREA)
- Evolutionary Computation (AREA)
- General Engineering & Computer Science (AREA)
- Artificial Intelligence (AREA)
- Image Analysis (AREA)
- Collating Specific Patterns (AREA)
- Lock And Its Accessories (AREA)
Abstract
本発明の情報処理装置は、ゲートの通過前領域を撮影した撮影画像内の対象と、予め登録された対象と、の照合処理を行う照合手段と、撮影画像内の対象の属性に基づいて設定された基準値を用いて撮影画像内の対象までの距離を推定する距離推定手段と、照合結果と撮影画像内の対象までの推定した距離とに基づいて前記ゲートの開閉を制御するゲート制御手段と、を備える。
Description
本発明は、情報処理装置、情報処理システム、プログラム、情報処理方法に関する。
オフィスやイベント会場などの特定場所に入退場する人物を制限したり管理する手段として、通過しようとする人物が予め登録された人物か否かを照合する照合システムが用いられる。特に、近年では、人物の顔認証技術の発達により、ゲートに設置したカメラで撮影した人物の顔画像から顔認証を行うウォークスルー顔認証システムが利用されている。
ここで、ウォークスルー顔認証システムにおいては、人物が円滑にゲートを通過できるよう、ゲートに並んでいる人物を順番通りに照合してゲートの開閉を行う必要がある。ところが、ゲートを通過しようとする人物はさまざまであり、順序を適切に判別することが困難である。その結果、ゲートの円滑な通過が困難である、という問題が生じる。
このため、本発明の目的は、上述した課題である、ゲートの円滑な通過が困難である、という問題を解決することにある。
本発明の一形態である情報処理装置は、
ゲートの通過前領域を撮影した撮影画像内の対象と、予め登録された対象と、の照合処理を行う照合手段と、
前記撮影画像内の対象の属性に基づいて設定された基準値を用いて前記ゲートから前記撮影画像内の対象までの距離を推定する距離推定手段と、
照合結果と前記撮影画像内の対象までの推定した距離とに基づいて前記ゲートの開閉を制御するゲート制御手段と、
を備えた、
という構成をとる。
ゲートの通過前領域を撮影した撮影画像内の対象と、予め登録された対象と、の照合処理を行う照合手段と、
前記撮影画像内の対象の属性に基づいて設定された基準値を用いて前記ゲートから前記撮影画像内の対象までの距離を推定する距離推定手段と、
照合結果と前記撮影画像内の対象までの推定した距離とに基づいて前記ゲートの開閉を制御するゲート制御手段と、
を備えた、
という構成をとる。
また、本発明の一形態である情報処理システムは、
ゲートに対する通過前領域を撮影した撮影画像を取得する撮像手段と、
前記撮影画像内の対象と、予め登録された対象と、の照合処理を行う照合手段と、
前記撮影画像内の対象の属性に基づいて設定された基準値を用いて前記ゲートから前記撮影画像内の対象までの距離を推定する距離推定手段と、を備え、
照合結果と前記撮影画像内の対象までの推定した距離とに基づいて前記ゲートの開閉を制御するゲート制御手段と、
を備えた、
という構成をとる。
ゲートに対する通過前領域を撮影した撮影画像を取得する撮像手段と、
前記撮影画像内の対象と、予め登録された対象と、の照合処理を行う照合手段と、
前記撮影画像内の対象の属性に基づいて設定された基準値を用いて前記ゲートから前記撮影画像内の対象までの距離を推定する距離推定手段と、を備え、
照合結果と前記撮影画像内の対象までの推定した距離とに基づいて前記ゲートの開閉を制御するゲート制御手段と、
を備えた、
という構成をとる。
また、本発明の一形態であるプログラムは、
情報処理装置に、
ゲートの通過前領域を撮影した撮影画像内の対象と、予め登録された対象と、の照合処理を行う照合手段と、
前記撮影画像内の対象の属性に基づいて設定された基準値を用いて前記ゲートから前記撮影画像内の対象までの距離を推定する距離推定手段と、
照合結果と前記撮影画像内の対象までの推定した距離とに基づいて前記ゲートの開閉を制御するゲート制御手段と、
を実現させる、
という構成をとる。
情報処理装置に、
ゲートの通過前領域を撮影した撮影画像内の対象と、予め登録された対象と、の照合処理を行う照合手段と、
前記撮影画像内の対象の属性に基づいて設定された基準値を用いて前記ゲートから前記撮影画像内の対象までの距離を推定する距離推定手段と、
照合結果と前記撮影画像内の対象までの推定した距離とに基づいて前記ゲートの開閉を制御するゲート制御手段と、
を実現させる、
という構成をとる。
また、本発明の一形態である情報処理方法は、
ゲートの通過前領域を撮影した撮影画像内の対象と、予め登録された対象と、の照合処理を行うと共に、
前記撮影画像内の対象の属性に基づいて設定された基準値を用いて前記ゲートから前記撮影画像内の対象までの距離を計測し、
照合結果と前記撮影画像内の対象までの計測した距離とに基づいて前記ゲートの開閉を制御する、
という構成をとる。
ゲートの通過前領域を撮影した撮影画像内の対象と、予め登録された対象と、の照合処理を行うと共に、
前記撮影画像内の対象の属性に基づいて設定された基準値を用いて前記ゲートから前記撮影画像内の対象までの距離を計測し、
照合結果と前記撮影画像内の対象までの計測した距離とに基づいて前記ゲートの開閉を制御する、
という構成をとる。
本発明は、以上のように構成されることにより、ゲートの円滑な通過を実現することができる情報処理装置を提供することができる。
<実施形態1>
本発明の第1の実施形態を、図1乃至図5を参照して説明する。図1は、顔認証システムの使用状況を示す図である。図2は、顔認証システムの構成を示す図である。図3乃至図5は、顔認証システムの処理動作を説明するための図である。
本発明の第1の実施形態を、図1乃至図5を参照して説明する。図1は、顔認証システムの使用状況を示す図である。図2は、顔認証システムの構成を示す図である。図3乃至図5は、顔認証システムの処理動作を説明するための図である。
[全体構成]
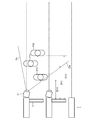
本発明における顔認証システム10(情報処理システム)は、オフィスやイベント会場などの特定場所において、人物(対象)の入退場を制限したり管理するために用いられるシステムである。例えば、顔認証システム10を構成する撮像装置Cは、人物の入退場の際に開閉されるゲート毎に、当該ゲートの配置箇所付近にそれぞれ設置されるものである。
本発明における顔認証システム10(情報処理システム)は、オフィスやイベント会場などの特定場所において、人物(対象)の入退場を制限したり管理するために用いられるシステムである。例えば、顔認証システム10を構成する撮像装置Cは、人物の入退場の際に開閉されるゲート毎に、当該ゲートの配置箇所付近にそれぞれ設置されるものである。
図1に示す例では、複数のゲートGが並列に隣接して配置されており、図1の右側から各ゲートGに向かって、矢印に示す方向に人物が通行するよう構成されている。このため、各ゲートGに対する図1の右側領域は、人物がゲートを通過する前側の領域(通過前側領域)となっている。そして、各ゲートGの通過前側領域には、当該各ゲートGを通過しようとする人物が並んで通行する各レーンが、各ゲートGにそれぞれ対応して並列に位置している。なお、各レーンは、何らかの部材で仕切られていてもよく、仕切られていなくてもよい。また、本実施形態では、複数のゲートGが隣接して配置されている場合を例示しているが、ゲートGは1つだけであってもよい。
図1に示す状況において、本実施形態における顔認証システム10を構成する撮像装置Cは、対応する各ゲートG付近であり、各ゲートGに向かう人物から見て右側に設置されている。但し、撮像装置の設置位置は、図1に示す位置に限定されず、ゲートに向かって左側やゲートの上方など、いかなる位置に設置されていてもよい。なお、顔認証システム10は、各撮像装置Cの近辺に、表示装置Dも備えている。
そして、顔認証システム10は、装備している撮像装置CにてゲートGに向かう人物の画像を撮影する。そして、撮影画像に映る人物の顔画像から、かかる人物が予め登録された人物であるか否かを照合し、照合が成功すると、人物が通過可能なようゲートGを開く、という処理を行う。以下、顔認証システム10の構成について詳述する。
[顔認証システムの構成]
本実施形態における顔認証システム10は、撮像装置C(カメラ)及び表示装置D(ディスプレイ)と一体的に構成された演算装置及び記憶装置を有する情報処理装置である。逆に言うと、撮像装置Cに、顔認証処理を行う演算装置及び記憶装置を有する情報処理装置と表示装置Dが搭載されている。但し、顔認証システム10は、必ずしも撮像装置Cや表示装置Dと一体的に構成されていることに限定されない。例えば、撮像装置Cと表示装置Dと撮影画像を処理する情報処理装置とが別々の装置にて構成されており、別々の場所に設置されていてもよい。
本実施形態における顔認証システム10は、撮像装置C(カメラ)及び表示装置D(ディスプレイ)と一体的に構成された演算装置及び記憶装置を有する情報処理装置である。逆に言うと、撮像装置Cに、顔認証処理を行う演算装置及び記憶装置を有する情報処理装置と表示装置Dが搭載されている。但し、顔認証システム10は、必ずしも撮像装置Cや表示装置Dと一体的に構成されていることに限定されない。例えば、撮像装置Cと表示装置Dと撮影画像を処理する情報処理装置とが別々の装置にて構成されており、別々の場所に設置されていてもよい。
具体的に、顔認証システム10は、図2に示すように、撮像装置C及び表示装置Dを備えると共に、演算装置がプログラムを実行することで構築された、基準値設定部11と、距離計測部12と、照合部13と、ゲート制御部14と、を備えている。また、顔認証システム10は、記憶装置に構築された、基準値記憶部15と、照合データ記憶部16と、を備えている。
上記撮像装置C(撮像手段)は、ゲートGに対する通過前側領域、つまり、対応するレーンのゲート前領域の撮影画像を、所定のフレームレートで取得するカメラ及びカメラ制御部を備えたものである。そして、撮像装置Cは、例えば図1に示すように、符号Ca線で挟まれた範囲が撮影領域となっている。例えば、図1のようにレーンに3人の人物P10,P11,P12が存在している場合には、撮像装置Cで撮影した撮影画像は図3上図のようになる。なお、撮影画像は、撮像装置Cに対する遠近方向の予め設定された距離の範囲で、概ね焦点が合うよう設定されている。
上記基準値設定部11(距離推定手段)は、撮像装置Cから撮影画像を取得し、後述するように撮影画像内の対象までの距離を計測するために必要な基準値を以下のように設定する。具体的に、基準値設定部11は、まず、撮影画像内から処理対象となる人物の顔領域の画像部分を抽出する。人物の顔領域の抽出は、例えば、動く人物の全体像に対する位置や色などから判定して行う。そして、基準値設定部11は、顔領域の画像部分から、人物の属性を判別する属性解析処理を行う。ここで、人物の属性とは、例えば、性別、年齢(年代、大人、子供)、人種、などである。
上記属性解析処理は、例えば、顔領域の画像部分から属性を判別するために必要な情報である属性判別情報を抽出し、かかる抽出した属性判別情報と予め登録されている属性判別基準情報とを比較して、人物の属性を判別する。ここで、属性判別情報は、例えば、性別や年齢といった属性毎に人物の顔領域に一般的に表れる身体的特徴を表す情報である。なお、人物の性別や年齢(年代)といった属性を判別する属性解析処理は、既存技術で実現可能であるため、かかる処理についての詳細は説明を省略する。また、判別可能な属性は、上述した属性に限定されず、いかなる属性であってもよい。
続いて、基準値設定部11は、判別した人物の属性に対応する基準値を設定する。ここで、基準値は、基準値記憶部15に予め登録されており、例えば、本実施形態では、人物の両目の間の距離を表す目間距離の基準値が、属性毎に登録されている。一例として、「男性」といった属性の基準値である目間距離としてある数値が登録されている場合に、「女性」といった属性の基準値である目間距離は、男性の基準値よりも小さい値が設定されている。また、例えば、年齢が15歳から70代までの「大人」といった属性の基準値である目間距離としてある数値が登録されている場合に、年齢が15歳未満の「子供」といった属性の基準値である目間距離は、大人の基準値よりも小さい値が設定されている。このように、基準値は、人物の属性の一般的な体格に応じた値となっている。そして、基準値設定部11は、撮影画像内から抽出した人物について判別した属性に対応して登録されている基準値を、当該人物の基準値として設定する。
上記距離計測部12(距離推定手段)は、上述したように人物に設定した基準値を用いて、当該人物までの距離を計測する。具体的に、距離計測部12は、まず、撮影画像内の人物の特徴を表す対象情報として、当該人物の顔領域の画像部分から人物の両目の間の距離を表す目間距離を検出する。例えば、図3下図の符号d10,d11,d12のように、撮影画像内の各人物P10,P11,P12の各目間距離を検出する。そして、検出した各目間距離d10,d11,d12を、各人物P10,P11,P12に設定した基準値と比較して、ゲートGから各人物までの距離を計測する。例えば、人物に設定した基準値に対する、当該人物から検出した目間距離の差や当該差の割合から、ゲートGから人物までの距離を計測する。なお、距離計測部12は、撮影画像内の人物の相対的な距離、つまり、ゲートGに対する順番、をゲートGに対する距離として計測してもよい。
ここで、ゲートGから人物P10,P11,P12までの距離計測の一例を説明する。図1の例では、ゲートGに向かって人物P10,P11,P12の順番で並んでおり、撮像画像は図3下図のように撮影される。このとき、各人物P10,P11,P12の体格や顔の大きさがほぼ同一であれば、各人物P10,P11,P12の各目間距離d10,d11,d12は、一般的にd10>d11>d12となる。一方で、仮に人物P10が子供であり、人物P11,P12が大人である場合には、一般的に子供の顔は小さく、目間距離が短いと考えられ、実際に計測した目間距離も、d11>d12>d10となってしまう。このような状況で、本実施形態では、人物P10は属性が「子供」と判別され、小さい値の基準値が設定され、かかる基準値と検出した目間距離d10とを用いて距離が計測される。そして、人物P11,P12は属性が「大人」と判別され、子供の基準値よりも大きい値の基準値が設定され、かかる基準値と検出した目間距離d11,d12とを用いて距離が計測される。これにより、図4に示すように、ゲートGに対する実際の順番と同じく、人物P10,P11,P12の順番となるよう各人物までの距離D10,D11,D12を計測できる。
なお、距離計測部12による目間距離の検出方法は上述した方法に限定されず、いかなる方法で検出してもよい。また、距離計測部12は、目間距離ではなく、人物の他の部位の大きさや他の特徴を対象情報として検出して、距離を計測してもよい。この場合、上述した基準値も、対象情報に対応した値となる。
ここで、距離計測部12は、必ずしもゲートGから人物までの距離を計測することに限定されない。例えば、距離計測部12は、ゲートに対する人物間の相対的な位置関係を推定してもよい。一例として、距離計測部12は、上述した目間距離などの対象情報と基準値とに基づいて、各人物のゲートまでの近さ、つまり、ゲートGに対する人物間の遠近関係を推定してもよい。
上記照合部13(照合手段)は、撮影画像内の人物と、予め登録された人物と、の照合処理を行う。このとき、照合部13は、上述したように計測した人物までの距離に基づいて照合処理を行う。例えば、照合部13は、ゲートGの直前に設定されたゲートGから予め設定された距離に位置する所定範囲に人物が位置し、かかる人物が撮影画像内でゲートGに対して最も近くに位置する場合に、かかる人物の照合処理を行う。なお、照合部13は、単にゲートGの直前に設定されたゲートGから予め設定された距離に位置する所定範囲に人物が位置している場合に、かかる人物の照合処理を行ってもよく、あるいは、人物までの距離に応じて他の基準に基づいてかかる人物の照合処理を行ってもよい。また、照合部13は、上述したように距離計測部12がゲートGに対する人物間の相対的な位置関係のみを推定している場合には、かかる位置関係からゲートGに最も近い人物に対して照合処理を行ってもよい。
照合部13による照合処理は、例えば以下のようにして行う。まず、照合処理の対象となる人物の顔領域から、照合に必要な特徴量を生成する。そして、生成した特徴量と、予め照合データ記憶部16に登録された人物の特徴量と、の類似度といった照合スコアを算出し、照合スコアがしきい値よりも高いか否か判定する。照合スコアがしきい値より高い場合には、照合成功とし、ゲートGを通過しようとしている人物が、予め登録されている人物であると判断する。このとき、照合するために検出する人物の特徴量は、既存の顔照合技術で用いられる特徴量であってもよく、いかなる方法によって算出される特徴量であってもよい。また、照合方法はいかなる方法であってもよい。
上記ゲート制御部14(ゲート制御手段)は、まず、上記照合部13による照合結果に基づいて、ゲートGに対する人物の通過可否を判定する。具体的には、照合部13による照合が成功した人物に対しては通過可能と判定する。また、ゲート制御部14は、照合結果つまり照合の成否を表示装置Dに表示する機能を有する。さらに、ゲート制御部14は、ゲートGの開閉を行うゲート制御機能も有しており、通過可能と判断した人物に対してはゲートGを開くよう制御する。このようにゲート制御部14は、人物のゲートGまでの距離に基づいて行われた照合処理の結果に応じてゲートGの開閉を制御するため、撮影画像内の人物までの計測した距離に基づいてゲートGの開閉を制御していると言える。
なお、上記表示装置Dは、ゲートGを通過しようとする人物が視認可能なよう、当該ゲートGの通過前側領域に表示面を向けて配置されている。但し、表示装置Dは、必ずしも装備されていなくてもよい。
[動作]
次に、上述した顔認証システム10の動作を、図5のフローチャートを参照して説明する。ここでは、ゲートGに対応する顔認証システム10の動作について説明し、ゲートGに対して人物が図3及び図4に示すように並んでいる場合を一例に説明する。
次に、上述した顔認証システム10の動作を、図5のフローチャートを参照して説明する。ここでは、ゲートGに対応する顔認証システム10の動作について説明し、ゲートGに対して人物が図3及び図4に示すように並んでいる場合を一例に説明する。
ゲートGに対応する撮像装置Cは、ゲートGの通過前側領域の画像を撮影し続ける。そして、顔認証システム10は、撮影した撮影画像に対して、常に以下の処理を行う。
まず、基準値設定部11が、撮影画像内から処理対象となる人物(対象)P10,P11,P12を抽出する(ステップS1)。そして、抽出した人物の顔領域の画像部分に対して属性解析処理を行い、人物の属性を判別する。例えば、図1及び図3の例では、人物P10の属性を子供、人物P11,P12の属性を大人、と判別したとする。すると、基準値設定部11は、判別した人物の属性に対応して基準値記憶部15に登録されている基準値を、かかる人物の基準値として設定する(ステップS2)。例えば、図3及び図4の例では、人物P10には、子供に対応する基準値を設定し、人物P11,P12には、大人に対応する基準値を設定する。
続いて、距離計測部12は、撮影画像内の人物のゲートGまでの距離を計測するために必要な対象情報としての人物の特徴となる所定部位の大きさ、ここでは、人物の目間距離を検出する(ステップS3)。例えば、各人物P10,P11,P12の各目間距離を、図3下図の符号d10,d11,d12のように検出する。
そして、距離計測部12は、上述したように各人物P10,P11,P12に設定した基準値と、各人物P10,P11,P12の目間距離d10,d11,d12とを、人物毎に比較して、ゲートGから各人物P10,P11,P12までの距離を計測する(ステップS4)。例えば、図3下図の例では、3人のうちゲートから2番目に人物P11の目間距離d11が最も大きく映っているが、各人物P10,P11,P12に設定された基準値が異なるため、ゲートGに対する実際の順番と同じく、図4に示すように人物P10,P11,P12の順番となるよう各人物までの距離D10,D11,D12が計測される。
続いて、照合部13は、上述したように計測した各人物P10,P11,P12までの距離に基づいて、各人物の照合処理を行う。このとき、照合部13は、ゲートGの直前に設定されたゲートGから予め設定された距離に人物が位置し、かかる人物が撮影画像内でゲートGに対して最も近くに位置する場合に、かかる人物の照合処理を行う(ステップS5、ステップS6)。このため、図4の例では、人物P10の照合処理を行う。具体的に、照合部13は、照合処理の対象となる人物の顔領域から、照合に必要な特徴量を生成して、生成した特徴量と、予め照合データ記憶部16に登録された人物の特徴量と、の類似度といった照合スコアを算出する。そして、照合部13は、照合スコアがしきい値より高い場合には照合成功とする。
照合部13による照合処理の結果、ゲートGの直前に位置する人物P10の照合に成功すると(ステップS6でYes)、ゲート制御部14がゲートGに対する人物P10の通過を許可し、ゲートGを開くよう制御する(ステップS7)。このとき、ゲート制御部14は、通過可を表示装置Dに表示する。
なお、照合部13による照合が失敗した場合には(ステップS6でNo)、ゲート制御部14はゲートを閉じたままとするが、このとき、表示装置Dに通行不可の表示と共に、通行に対するガイド情報を表示してもよい。例えば、照合部13による照合処理の際に、照合に必要な上記特徴量の品質が低い(顔画像の品質が低い)と判断された場合には、照合に必要な品質の特徴量を得られるようなガイド情報を表示してもよい。ガイド情報は、例えば、「マスクを外してください」、「正面を向いてください」という情報である。
以上のように、本実施形態の顔認証システム10によると、様々な属性の人物がゲートGを通過しようとしている場合であっても、ゲートGに対する人物の順序を適切に判別することができ、ゲート直前の人物に対する照合とゲート開閉を行うことができる。例えば、図3及び図4の例においては、撮影画像に映る人物の大きさから、実際にはゲートGから2番目に位置する人物P11がゲートGに最も近いと誤って判断されるおそれがある。ところが、本実施形態の方法では、実際にゲートGに最も近い人物P10に対する照合処理を行うことができる。その結果、人物によるゲートGの円滑な通過を実現することができる。
そして、上述した人物の属性を判別する処理や距離を計測する処理は、人物の特徴量の抽出や照合を行う照合処理よりも情報処理装置にかかる負荷が少ない処理である。このため、高速な照合処理を維持することができ、人物によるゲートGの円滑な通過を実現することができる。
なお、上記では、ゲートGを通過しようとしている対象が人物である場合を例示したが、人物に限らずいかなる物体でもよい。例えば、荷物といった物体であってもよい。これに応じて、上述した基準値や対象の特徴を表す対象情報といったゲートGからの距離を計測するために用いる情報は、物体から検出できるいかなる特徴を表す情報であってもよい。また、照合処理を行う際には、物体から検出できるいかなる特徴量を利用してもよい。
<実施形態2>
次に、本発明の第2の実施形態を、図6を参照して説明する。図6は、顔認証システムの処理動作を説明するための図である。
次に、本発明の第2の実施形態を、図6を参照して説明する。図6は、顔認証システムの処理動作を説明するための図である。
本実施形態における顔認証システム10は、上述した実施形態1におけるものと同様の構成であるが、人物の属性に応じて基準値を設定する処理が異なる。以下、主に実施形態1とは異なる構成について詳述する。
本実施形態における照合部13(照合手段)は、撮像装置Cにて撮影画像が撮影されると、撮影画像内の人物を抽出して、まず人物の照合処理を行う。具体的に、照合部13は、撮影画像内の人物を抽出して、抽出された全ての人物を照合対象とし、かかる人物の顔領域から照合に必要な特徴量を生成する。そして、生成した特徴量と、予め照合データ記憶部16に登録された人物の特徴量と、の類似度といった照合スコアを算出し、照合スコアがしきい値より高い場合には照合成功とする。
照合部13は、照合成功となった場合には、照合された照合データ記憶部16に登録されている人物の情報を取得し、かかる人物の情報に含まれる当該人物の属性を読み取る。そして、照合部13は、読み取った属性を基準値設定部11に渡す。なお、照合データ記憶部16は、照合処理に用いられる人物の特徴量と共に、予め判別している人物の属性(性別、年代など)の情報を記憶している。
また、本実施形態における基準値設定部11(距離推定手段)は、照合部13による照合処理の結果から、撮影画像内の人物の属性を判別する。つまり、基準値設定部11は、上述したように照合部13から渡された登録されている人物の属性を、撮影画像内の人物の属性として判別する。そして、基準値設定部11は、判別した人物の属性に対応する基準値記憶部15に登録されている基準値を、かかる人物の基準値として設定する。
そして、本実施形態における距離計測部12(距離推定手段)は、実施形態1と同様に、人物に設定した基準値を用いて、当該人物までの距離を計測する。具体的に、距離計測部12は、撮影画像内の人物から目間距離を検出して、検出した目間距離を、人物に設定した基準値と比較して、ゲートGから各人物までの距離を計測する。このとき、距離計測部12は、撮影画像内の各人物に対して、上述した照合部13によって照合成功と判断された旨と、計測した距離と、を関連付けておく。なお、距離計測部12は、撮影画像が取得されるごとに撮影画像内の人物までの距離を計測して、撮影画像上の人物に関連付ける距離を更新する。なお、時間的に前後する撮影画像内における人物の対応付けは、特徴点の追跡などによって実現可能である。このため、撮影画像内の人物が一度でも照合成功とされると、かかる人物が後続の撮影画像内で追跡されて、照合成功の旨と更新された距離とが関連付けられることとなる。
そして、本実施形態におけるゲート制御部14(ゲート制御手段)は、撮影画像内の人物に関連付けられた距離に基づいて、ゲートGの開閉を制御する。つまり、ゲート制御部14は、撮影画像内の人物に既に照合成功の旨が関連付けられており、かつ、かかる人物に関連付けられている距離が、ゲートGの直前に設定されたゲートGから予め設定された距離に位置する所定範囲であり、かかる人物が撮影画像内でゲートGに対して最も近くに位置する場合には、かかる人物に対しては通過可能と判定する。そして、ゲート制御部14は、照合結果つまり照合の成功を表示装置Dに表示し、ゲートGを開くよう制御する。このようにゲート制御部14は、撮影画像内の人物のゲートGまでの距離に基づいてゲートGの開閉を制御する。
なお、ゲート制御部14は、ゲートGの直前に位置する撮影画像内の人物に対して、再度、照合部13に指示して最終的な照合処理を行ってもよい。そして、ゲート制御部14は、最終的な照合処理が成功した場合にのみゲートGを開いてもよい。
ここで、上述した照合部13による照合処理の結果、照合成功となったものの、照合データ記憶部16に人物の属性が登録されていないなどの事情で、撮影画像内の人物の属性を判別できない場合もある。その場合には、まず実施形態1と同様に、基準値設定部11が撮影画像内の人物の画像部分に対する属性解析処理を行ってかかる人物の属性を判別して、当該属性に対応する基準値を設定する。そして、距離計測部12が、設定された基準値を用いて人物までの距離を計測し、ゲート制御部14が、照合処理の処理結果に基づいてゲートの開閉を制御する。
なお、上述した照合部13による照合処理の結果、撮影画像内の人物の照合が失敗した場合であっても、実施形態1と同様に、基準値設定部11にてかかる人物の属性を判定し、距離計測部12にてかかる人物までの距離を計測してもよい。そして、後続の撮影画像内で追跡した同一人物に、照合失敗の旨と距離とを関連付けておくことで、かかる情報に基づいて人物がゲートGの直前に位置したときに、ゲート制御部14が通行不可の判定を行ってもよい。このとき、ゲート制御部14は、上述した通行に対するガイド情報を表示してもよい。
[動作]
次に、上述した顔認証システム10の動作を、図6のフローチャートを参照して説明する。ゲートGに対応する撮像装置Cは、ゲートGの通過前側領域の画像を撮影し続ける。そして、顔認証システム10は、撮影した撮影画像に対して、常に以下の処理を行う。
次に、上述した顔認証システム10の動作を、図6のフローチャートを参照して説明する。ゲートGに対応する撮像装置Cは、ゲートGの通過前側領域の画像を撮影し続ける。そして、顔認証システム10は、撮影した撮影画像に対して、常に以下の処理を行う。
まず、照合部13が、撮影画像内から処理対象となる人物(対象)を抽出する(ステップS11)。照合部13は、撮影画像から抽出された全ての人物を照合対象とし、かかる人物の顔領域から照合に必要な特徴量を生成する。そして、生成した特徴量と、予め照合データ記憶部16に登録された人物の特徴量と、の類似度といった照合スコアを算出し、照合処理を行う(ステップS12)。
照合部13は、照合成功となった場合には(ステップS13でYes)、照合された照合データ記憶部16に登録されている人物の情報を取得し、かかる人物の情報に含まれる当該人物の属性を読み取る(ステップS14)。かかる人物の属性を読み取ることができた場合には(ステップS14でYes)、基準値設定部11は、読み取った属性を、撮影画像内の人物の属性として判別する。そして、基準値設定部11は、判別した人物の属性に対応する基準値記憶部15に登録されている基準値を、かかる人物の基準値として設定する(ステップS15)。
続いて、距離計測部12は、撮影画像内の人物のゲートGまでの距離を計測するために必要な対象情報としての人物の特徴となる所定部位の大きさ、ここでは、人物の目間距離を検出する(ステップS16)。そして、距離計測部12は、上述したように人物に設定した基準値と人物の目間距離とを比較して、ゲートGから人物までの距離を計測する(ステップS17)。このとき、距離計測部12は、撮影画像内の人物に、計測した距離を関連付けておく。
続いて、ゲート制御部14は、撮影画像内の人物の距離が、ゲート直前の設定された距離の範囲内であり、かかる人物が撮影画像内でゲートGに対して最も近くに位置する場合には、ゲートGを開くよう制御する(ステップS18)。なお、上述した距離計測部12による人物までの距離の計測は常に行われており、照合に成功した撮影画像内の人物に最新の距離が関連付けられることとなる。このため、ゲート制御部14は、照合に成功した人物に関連付けられた距離が、ゲート直前の設定された距離に位置する度に、ゲートGを開く制御を行う。
ここで、上述した照合成功後に(ステップS13でYes)、照合データ記憶部16に人物の属性が登録されていないなど当該人物の属性を判別できない場合には(ステップS14でNo)、基準値設定部11は、実施形態1と同様に人物の基準値を設定する。つまり、基準値設定部11は、撮影画像内から処理対象となる人物を抽出し、抽出した人物の顔領域の画像部分に対して属性解析処理を行い、人物の属性を判別する。そして、基準値設定部11は、判別した人物の属性に対応して基準値記憶部15に登録されている基準値を、かかる人物の属性として設定する(ステップS19)。
その後は、設定された基準値を用いて、上述同様に、距離計測部12が撮影画像内の人物のゲートGまでの距離を計測する(ステップS16,S17)。そして、ゲート制御部14が、撮影画像内の人物の距離が、ゲート直前の設定された距離の範囲内であり、かかる人物が撮影画像内でゲートGに対して最も近くに位置する場合には、ゲートGを開くよう制御する(ステップS18)。
以上のように、本実施形態の顔認証システム10では、実施形態1とは異なり、先に人物の照合処理を行い、その後の人物のゲートGまでの距離に応じてゲートGを開くようにしている。このため、ゲートGに人物が近づいたときに適切にゲートGを開くことができ、人物によるゲートGの円滑な通過を実現することができる。
<実施形態3>
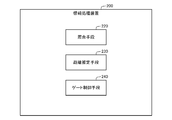
次に、本発明の第3の実施形態を、図7及び図8を参照して説明する。図7は、実施形態3における情報処理システムの構成を示すブロック図である。図8は、実施形態3における情報処理装置の構成を示すブロック図である。なお、本実施形態では、実施形態1及び実施形態2で説明した顔認証システムの構成の概略を示している。
次に、本発明の第3の実施形態を、図7及び図8を参照して説明する。図7は、実施形態3における情報処理システムの構成を示すブロック図である。図8は、実施形態3における情報処理装置の構成を示すブロック図である。なお、本実施形態では、実施形態1及び実施形態2で説明した顔認証システムの構成の概略を示している。
図7に示すように、本実施形態おける情報処理システム100は、
ゲートに対する通過前領域を撮影した撮影画像を取得する撮像手段110と、
前記撮影画像内の対象と、予め登録された対象と、の照合処理を行う照合手段120と、
前記撮影画像内の対象の属性に基づいて設定された基準値を用いて前記ゲートから前記撮影画像内の対象までの距離を計測する距離推定手段130と、
照合結果と前記撮影画像内の対象までの推定した距離とに基づいて前記ゲートの開閉を制御するゲート制御手段140と、
を備えた、という構成をとる。
ゲートに対する通過前領域を撮影した撮影画像を取得する撮像手段110と、
前記撮影画像内の対象と、予め登録された対象と、の照合処理を行う照合手段120と、
前記撮影画像内の対象の属性に基づいて設定された基準値を用いて前記ゲートから前記撮影画像内の対象までの距離を計測する距離推定手段130と、
照合結果と前記撮影画像内の対象までの推定した距離とに基づいて前記ゲートの開閉を制御するゲート制御手段140と、
を備えた、という構成をとる。
また、本実施形態では、図8に示す情報処理システム100から撮像手段110を取り除いてもよい。
つまり、本実施形態における情報処理装置200は、
ゲートの通過前領域を撮影した撮影画像内の対象と、予め登録された対象と、の照合処理を行う照合手段220と、
前記撮影画像内の対象の属性に基づいて設定された基準値を用いて前記撮影画像内の対象までの距離を推定する距離推定手段230と、
照合結果と前記撮影画像内の対象までの推定した距離とに基づいて前記ゲートの開閉を制御するゲート制御手段240と、
を備えた、という構成をとる。
つまり、本実施形態における情報処理装置200は、
ゲートの通過前領域を撮影した撮影画像内の対象と、予め登録された対象と、の照合処理を行う照合手段220と、
前記撮影画像内の対象の属性に基づいて設定された基準値を用いて前記撮影画像内の対象までの距離を推定する距離推定手段230と、
照合結果と前記撮影画像内の対象までの推定した距離とに基づいて前記ゲートの開閉を制御するゲート制御手段240と、
を備えた、という構成をとる。
なお、上述した照合手段120,220と距離推定手段130,230とゲート制御手段140,240とは、演算装置がプログラムを実行することで構築されるものであってもよく、電子回路で構築されるものであってもよい。
そして、上記構成の情報処理システム100あるいは情報処理装置200は、
ゲートの通過前領域を撮影した撮影画像内の対象と、予め登録された対象と、の照合処理を行うと共に、
前記撮影画像内の対象の属性に基づいて設定された基準値を用いて前記ゲートから前記撮影画像内の対象までの距離を推定し、
照合結果と前記撮影画像内の対象までの推定した距離とに基づいて前記ゲートの開閉を制御する、
という処理を行うよう作動する。
ゲートの通過前領域を撮影した撮影画像内の対象と、予め登録された対象と、の照合処理を行うと共に、
前記撮影画像内の対象の属性に基づいて設定された基準値を用いて前記ゲートから前記撮影画像内の対象までの距離を推定し、
照合結果と前記撮影画像内の対象までの推定した距離とに基づいて前記ゲートの開閉を制御する、
という処理を行うよう作動する。
上述した情報処理システム100あるいは情報処理装置200によると、様々な属性の人物がゲートを通過しようとしている場合であっても、ゲートに対する人物の順序を適切に判別することができ、ゲート直前の人物に対する照合とゲート開閉を行うことができる。その結果、人物によるゲートの円滑な通過を実現することができる。
<付記>
上記実施形態の一部又は全部は、以下の付記のようにも記載されうる。以下、本発明における情報処理装置、情報処理システム、プログラム、情報処理方法の構成の概略を説明する。但し、本発明は、以下の構成に限定されない。
上記実施形態の一部又は全部は、以下の付記のようにも記載されうる。以下、本発明における情報処理装置、情報処理システム、プログラム、情報処理方法の構成の概略を説明する。但し、本発明は、以下の構成に限定されない。
(付記1)
ゲートの通過前領域を撮影した撮影画像内の対象と、予め登録された対象と、の照合処理を行う照合手段と、
前記撮影画像内の対象の属性に基づいて設定された基準値を用いて前記撮影画像内の対象までの距離を推定する距離推定手段と、
照合結果と前記撮影画像内の対象までの推定した距離とに基づいて前記ゲートの開閉を制御するゲート制御手段と、
を備えた情報処理装置。
ゲートの通過前領域を撮影した撮影画像内の対象と、予め登録された対象と、の照合処理を行う照合手段と、
前記撮影画像内の対象の属性に基づいて設定された基準値を用いて前記撮影画像内の対象までの距離を推定する距離推定手段と、
照合結果と前記撮影画像内の対象までの推定した距離とに基づいて前記ゲートの開閉を制御するゲート制御手段と、
を備えた情報処理装置。
(付記2)
付記1に記載の情報処理装置であって、
前記照合手段は、推定した前記撮影画像内の対象まで距離に基づいて前記照合処理を行い、
前記ゲート制御手段は、前記撮影画像内の対象までの距離に基づいて行われた前記照合処理の処理結果に基づいて前記ゲートの開閉を制御する、
情報処理装置。
付記1に記載の情報処理装置であって、
前記照合手段は、推定した前記撮影画像内の対象まで距離に基づいて前記照合処理を行い、
前記ゲート制御手段は、前記撮影画像内の対象までの距離に基づいて行われた前記照合処理の処理結果に基づいて前記ゲートの開閉を制御する、
情報処理装置。
(付記3)
付記2に記載の情報処理装置であって、
前記距離推定手段は、前記撮影画像内の対象の画像部分に対する属性解析処理に基づいて当該対象の属性を判別して、当該属性に対応する前記基準値を設定し、当該設定された基準値を用いて前記撮影画像内の対象までの距離を推定する、
情報処理装置。
付記2に記載の情報処理装置であって、
前記距離推定手段は、前記撮影画像内の対象の画像部分に対する属性解析処理に基づいて当該対象の属性を判別して、当該属性に対応する前記基準値を設定し、当該設定された基準値を用いて前記撮影画像内の対象までの距離を推定する、
情報処理装置。
(付記4)
付記1に記載の情報処理装置であって、
前記距離推定手段は、前記照合処理の結果から予め登録されている対象の属性を前記撮影画像内の対象の属性として判別し、当該属性に対応する前記基準値を設定し、当該設定された基準値を用いて前記撮影画像内の対象までの距離を推定する、
情報処理装置。
付記1に記載の情報処理装置であって、
前記距離推定手段は、前記照合処理の結果から予め登録されている対象の属性を前記撮影画像内の対象の属性として判別し、当該属性に対応する前記基準値を設定し、当該設定された基準値を用いて前記撮影画像内の対象までの距離を推定する、
情報処理装置。
(付記5)
付記4に記載の情報処理装置であって、
前記距離推定手段は、前記照合処理の結果から前記撮影画像内の対象の属性を判別できなかった場合に、前記撮影画像内の対象の画像部分に対する属性解析処理に基づいて当該対象の属性を判別して、当該属性に対応する前記基準値を設定し、当該設定された基準値を用いて前記撮影画像内の対象までの距離を推定する、
情報処理装置。
付記4に記載の情報処理装置であって、
前記距離推定手段は、前記照合処理の結果から前記撮影画像内の対象の属性を判別できなかった場合に、前記撮影画像内の対象の画像部分に対する属性解析処理に基づいて当該対象の属性を判別して、当該属性に対応する前記基準値を設定し、当該設定された基準値を用いて前記撮影画像内の対象までの距離を推定する、
情報処理装置。
(付記6)
付記1乃至5のいずれかに記載の情報処理装置であって、
前記距離推定手段は、前記撮影画像内の対象の特徴を表す対象情報を検出して、前記基準値と前記対象情報とに基づいて前記撮影画像内の対象までの距離を推定する、
情報処理装置。
付記1乃至5のいずれかに記載の情報処理装置であって、
前記距離推定手段は、前記撮影画像内の対象の特徴を表す対象情報を検出して、前記基準値と前記対象情報とに基づいて前記撮影画像内の対象までの距離を推定する、
情報処理装置。
(付記7)
付記6に記載の情報処理装置であって、
前記距離推定手段は、前記対象情報として前記撮影画像内の対象の所定部位の大きさを検出して、前記基準値に対する前記対象の所定部位の大きさに基づいて前記撮影画像内の対象までの距離を推定する、
情報処理装置。
付記6に記載の情報処理装置であって、
前記距離推定手段は、前記対象情報として前記撮影画像内の対象の所定部位の大きさを検出して、前記基準値に対する前記対象の所定部位の大きさに基づいて前記撮影画像内の対象までの距離を推定する、
情報処理装置。
(付記8)
付記7に記載の情報処理装置であって、
前記距離推定手段は、同一の前記撮影画像内の対象毎の、当該対象に対応して設定された前記基準値に対する当該対象の所定部位の大きさを相互に比較して、前記ゲートに対する前記対象画像内の対象間の遠近関係を判定する、
情報処理装置。
付記7に記載の情報処理装置であって、
前記距離推定手段は、同一の前記撮影画像内の対象毎の、当該対象に対応して設定された前記基準値に対する当該対象の所定部位の大きさを相互に比較して、前記ゲートに対する前記対象画像内の対象間の遠近関係を判定する、
情報処理装置。
(付記9)
付記1乃至8のいずれかに記載の情報処理装置であって、
前記ゲート制御手段は、前記撮影画像内の対象について相互に関連付けられた、当該対象に対する前記照合手段による照合結果と、前記ゲートから当該対象までの距離と、に基づいて、前記ゲートの開閉を制御する、
情報処理装置。
付記1乃至8のいずれかに記載の情報処理装置であって、
前記ゲート制御手段は、前記撮影画像内の対象について相互に関連付けられた、当該対象に対する前記照合手段による照合結果と、前記ゲートから当該対象までの距離と、に基づいて、前記ゲートの開閉を制御する、
情報処理装置。
(付記10)
ゲートに対する通過前領域を撮影した撮影画像を取得する撮像手段と、
前記撮影画像内の対象と、予め登録された対象と、の照合処理を行う照合手段と、
前記撮影画像内の対象の属性に基づいて設定された基準値を用いて前記ゲートから前記撮影画像内の対象までの距離を推定する距離推定手段と、
照合結果と前記撮影画像内の対象までの推定した距離とに基づいて前記ゲートの開閉を制御するゲート制御手段と、
を備えた情報処理システム。
ゲートに対する通過前領域を撮影した撮影画像を取得する撮像手段と、
前記撮影画像内の対象と、予め登録された対象と、の照合処理を行う照合手段と、
前記撮影画像内の対象の属性に基づいて設定された基準値を用いて前記ゲートから前記撮影画像内の対象までの距離を推定する距離推定手段と、
照合結果と前記撮影画像内の対象までの推定した距離とに基づいて前記ゲートの開閉を制御するゲート制御手段と、
を備えた情報処理システム。
(付記10.1)
付記10に記載の情報処理システムであって、
前記照合手段は、推定した前記撮影画像内の対象まで距離に基づいて前記照合処理を行い、
前記ゲート制御手段は、前記撮影画像内の対象までの距離に基づいて行われた前記照合処理の処理結果に基づいて前記ゲートの開閉を制御する、
情報処理システム。
付記10に記載の情報処理システムであって、
前記照合手段は、推定した前記撮影画像内の対象まで距離に基づいて前記照合処理を行い、
前記ゲート制御手段は、前記撮影画像内の対象までの距離に基づいて行われた前記照合処理の処理結果に基づいて前記ゲートの開閉を制御する、
情報処理システム。
(付記10.2)
付記10に記載の情報処理装置であって、
前記距離推定手段は、前記照合処理の結果から予め登録されている対象の属性を前記撮影画像内の対象の属性として判別し、当該属性に対応する前記基準値を設定し、当該設定された基準値を用いて前記撮影画像内の対象までの距離を推定する、
情報処理システム。
付記10に記載の情報処理装置であって、
前記距離推定手段は、前記照合処理の結果から予め登録されている対象の属性を前記撮影画像内の対象の属性として判別し、当該属性に対応する前記基準値を設定し、当該設定された基準値を用いて前記撮影画像内の対象までの距離を推定する、
情報処理システム。
(付記11)
情報処理装置に、
ゲートの通過前領域を撮影した撮影画像内の対象と、予め登録された対象と、の照合処理を行う照合手段と、
前記撮影画像内の対象の属性に基づいて設定された基準値を用いて前記撮影画像内の対象までの距離を推定する距離推定手段と、
照合結果と前記撮影画像内の対象までの推定した距離とに基づいて前記ゲートの開閉を制御するゲート制御手段と、
を実現させるためのプログラム。
情報処理装置に、
ゲートの通過前領域を撮影した撮影画像内の対象と、予め登録された対象と、の照合処理を行う照合手段と、
前記撮影画像内の対象の属性に基づいて設定された基準値を用いて前記撮影画像内の対象までの距離を推定する距離推定手段と、
照合結果と前記撮影画像内の対象までの推定した距離とに基づいて前記ゲートの開閉を制御するゲート制御手段と、
を実現させるためのプログラム。
(付記11.1)
付記11に記載のプログラムであって、
前記照合手段は、推定した前記撮影画像内の対象まで距離に基づいて前記照合処理を行い、
前記ゲート制御手段は、前記撮影画像内の対象までの距離に基づいて行われた前記照合処理の処理結果に基づいて前記ゲートの開閉を制御する、
プログラム。
付記11に記載のプログラムであって、
前記照合手段は、推定した前記撮影画像内の対象まで距離に基づいて前記照合処理を行い、
前記ゲート制御手段は、前記撮影画像内の対象までの距離に基づいて行われた前記照合処理の処理結果に基づいて前記ゲートの開閉を制御する、
プログラム。
(付記11.2)
付記11に記載のプログラムであって、
前記距離推定手段は、前記照合処理の結果から予め登録されている対象の属性を前記撮影画像内の対象の属性として判別し、当該属性に対応する前記基準値を設定し、当該設定された基準値を用いて前記撮影画像内の対象までの距離を推定する、
プログラム。
付記11に記載のプログラムであって、
前記距離推定手段は、前記照合処理の結果から予め登録されている対象の属性を前記撮影画像内の対象の属性として判別し、当該属性に対応する前記基準値を設定し、当該設定された基準値を用いて前記撮影画像内の対象までの距離を推定する、
プログラム。
(付記12)
ゲートの通過前領域を撮影した撮影画像内の対象と、予め登録された対象と、の照合処理を行い、
前記撮影画像内の対象の属性に基づいて設定された基準値を用いて前記撮影画像内の対象までの距離を計測し、
照合結果と前記撮影画像内の対象までの推定した距離とに基づいて前記ゲートの開閉を制御する、
情報処理方法。
ゲートの通過前領域を撮影した撮影画像内の対象と、予め登録された対象と、の照合処理を行い、
前記撮影画像内の対象の属性に基づいて設定された基準値を用いて前記撮影画像内の対象までの距離を計測し、
照合結果と前記撮影画像内の対象までの推定した距離とに基づいて前記ゲートの開閉を制御する、
情報処理方法。
(付記13)
付記12に記載の情報処理方法であって、
推定した前記撮影画像内の対象まで距離に基づいて前記照合処理を行い、
前記撮影画像内の対象までの距離に基づいて行われた前記照合処理の処理結果に基づいて前記ゲートの開閉を制御する、
情報処理方法。
付記12に記載の情報処理方法であって、
推定した前記撮影画像内の対象まで距離に基づいて前記照合処理を行い、
前記撮影画像内の対象までの距離に基づいて行われた前記照合処理の処理結果に基づいて前記ゲートの開閉を制御する、
情報処理方法。
(付記13.1)
付記13に記載の情報処理方法であって、
前記撮影画像内の対象の画像部分に対する属性解析処理に基づいて当該対象の属性を判別して、当該属性に対応する前記基準値を設定する、
情報処理方法。
付記13に記載の情報処理方法であって、
前記撮影画像内の対象の画像部分に対する属性解析処理に基づいて当該対象の属性を判別して、当該属性に対応する前記基準値を設定する、
情報処理方法。
(付記14)
付記12に記載の情報処理方法であって、
前記照合処理の結果から予め登録されている対象の属性を前記撮影画像内の対象の属性として判別し、当該属性に対応する前記基準値を設定し、
前記基準値を用いて前記撮影画像内の対象までの距離を推定し、
前記撮影画像内の対象までの距離に基づいて前記ゲートの開閉を制御する、
情報処理方法。
付記12に記載の情報処理方法であって、
前記照合処理の結果から予め登録されている対象の属性を前記撮影画像内の対象の属性として判別し、当該属性に対応する前記基準値を設定し、
前記基準値を用いて前記撮影画像内の対象までの距離を推定し、
前記撮影画像内の対象までの距離に基づいて前記ゲートの開閉を制御する、
情報処理方法。
(付記15)
付記14に記載の情報処理方法であって、
前記照合処理の結果から前記撮影画像内の対象の属性を判別できなかった場合に、前記撮影画像内の対象の画像部分に対する属性解析処理に基づいて当該対象の属性を判別して、当該属性に対応する前記基準値を設定し、
前記基準値を用いて前記撮影画像内の対象までの距離を推定し、
前記撮影画像内の対象までの距離に基づいて前記ゲートの開閉を制御する、
て前記ゲートの開閉を制御する、
情報処理方法。
付記14に記載の情報処理方法であって、
前記照合処理の結果から前記撮影画像内の対象の属性を判別できなかった場合に、前記撮影画像内の対象の画像部分に対する属性解析処理に基づいて当該対象の属性を判別して、当該属性に対応する前記基準値を設定し、
前記基準値を用いて前記撮影画像内の対象までの距離を推定し、
前記撮影画像内の対象までの距離に基づいて前記ゲートの開閉を制御する、
て前記ゲートの開閉を制御する、
情報処理方法。
(付記15.1)
付記12乃至15のいずれかに記載の情報処理方法であって、
前記撮影画像内の対象の特徴を表す対象情報を検出して、前記基準値と前記対象情報とに基づいて前記対象画像内の対象までの距離を計測する、
情報処理方法。
付記12乃至15のいずれかに記載の情報処理方法であって、
前記撮影画像内の対象の特徴を表す対象情報を検出して、前記基準値と前記対象情報とに基づいて前記対象画像内の対象までの距離を計測する、
情報処理方法。
(付記15.2)
付記15.1に記載の情報処理方法であって、
前記対象情報として前記撮影画像内の対象の所定部位の大きさを検出して、前記基準値に対する前記対象の所定部位の大きさに基づいて前記対象画像内の対象までの距離を計測する、
情報処理方法。
付記15.1に記載の情報処理方法であって、
前記対象情報として前記撮影画像内の対象の所定部位の大きさを検出して、前記基準値に対する前記対象の所定部位の大きさに基づいて前記対象画像内の対象までの距離を計測する、
情報処理方法。
(付記15.3)
付記15.2に記載の情報処理方法であって、
同一の前記撮影画像内の対象毎の、当該対象に対応して設定された前記基準値に対する当該対象の所定部位の大きさを相互に比較して、前記ゲートに対する前記撮影画像内の対象間の遠近関係を判定する、
情報処理方法。
付記15.2に記載の情報処理方法であって、
同一の前記撮影画像内の対象毎の、当該対象に対応して設定された前記基準値に対する当該対象の所定部位の大きさを相互に比較して、前記ゲートに対する前記撮影画像内の対象間の遠近関係を判定する、
情報処理方法。
なお、上述したプログラムは、様々なタイプの非一時的なコンピュータ可読媒体(non-transitory computer readable medium)を用いて格納され、コンピュータに供給することができる。非一時的なコンピュータ可読媒体は、様々なタイプの実体のある記録媒体(tangible storage medium)を含む。非一時的なコンピュータ可読媒体の例は、磁気記録媒体(例えばフレキシブルディスク、磁気テープ、ハードディスクドライブ)、光磁気記録媒体(例えば光磁気ディスク)、CD-ROM(Read Only Memory)、CD-R、CD-R/W、半導体メモリ(例えば、マスクROM、PROM(Programmable ROM)、EPROM(Erasable PROM)、フラッシュROM、RAM(Random Access Memory))を含む。また、プログラムは、様々なタイプの一時的なコンピュータ可読媒体(transitory computer readable medium)によってコンピュータに供給されてもよい。一時的なコンピュータ可読媒体の例は、電気信号、光信号、及び電磁波を含む。一時的なコンピュータ可読媒体は、電線及び光ファイバ等の有線通信路、又は無線通信路を介して、プログラムをコンピュータに供給できる。
以上、上記実施形態等を参照して本願発明を説明したが、本願発明は、上述した実施形態に限定されるものではない。本願発明の構成や詳細には、本願発明の範囲内で当業者が理解しうる様々な変更をすることができる。
なお、本発明は、日本国にて2018年1月31日に特許出願された特願2018-014274の特許出願に基づく優先権主張の利益を享受するものであり、当該特許出願に記載された内容は、全て本明細書に含まれるものとする。
10 顔認証システム
11 基準値設定部
12 距離計測部
13 照合部
14 ゲート制御部
15 基準値記憶部
16 照合データ記憶部
100 情報処理システム
200 情報処理装置
110 撮像手段
120,220 照合手段
130,230 距離推定手段
140,240 ゲート制御手段
C 撮像装置
D 表示装置
G ゲート
11 基準値設定部
12 距離計測部
13 照合部
14 ゲート制御部
15 基準値記憶部
16 照合データ記憶部
100 情報処理システム
200 情報処理装置
110 撮像手段
120,220 照合手段
130,230 距離推定手段
140,240 ゲート制御手段
C 撮像装置
D 表示装置
G ゲート
Claims (15)
- ゲートの通過前領域を撮影した撮影画像内の対象と、予め登録された対象と、の照合処理を行う照合手段と、
前記撮影画像内の対象の属性に基づいて設定された基準値を用いて前記ゲートから前記撮影画像内の対象までの距離を推定する距離推定手段と、
照合結果と前記撮影画像内の対象までの推定した距離とに基づいて前記ゲートの開閉を制御するゲート制御手段と、
を備えた情報処理装置。 - 請求項1に記載の情報処理装置であって、
前記照合手段は、推定した前記撮影画像内の対象までの距離に基づいて前記照合処理を行い、
前記ゲート制御手段は、前記撮影画像内の対象までの距離に基づいて行われた前記照合処理の処理結果に基づいて前記ゲートの開閉を制御する、
情報処理装置。 - 請求項2に記載の情報処理装置であって、
前記距離推定手段は、前記撮影画像内の対象の画像部分に対する属性解析処理に基づいて当該対象の属性を判別して、当該属性に対応する前記基準値を設定し、当該設定された基準値を用いて前記撮影画像内の対象までの距離を推定する、
情報処理装置。 - 請求項1に記載の情報処理装置であって、
前記距離推定手段は、前記照合処理の結果から予め登録されている対象の属性を前記撮影画像内の対象の属性として判別し、当該属性に対応する前記基準値を設定し、当該設定された基準値を用いて前記撮影画像内の対象までの距離を推定する、
情報処理装置。 - 請求項4に記載の情報処理装置であって、
前記距離推定手段は、前記照合処理の結果から前記撮影画像内の対象の属性を判別できなかった場合に、前記撮影画像内の対象の画像部分に対する属性解析処理に基づいて当該対象の属性を判別して、当該属性に対応する前記基準値を設定し、当該設定された基準値を用いて前記撮影画像内の対象までの距離を推定する、
情報処理装置。 - 請求項1乃至5のいずれかに記載の情報処理装置であって、
前記距離推定手段は、前記撮影画像内の対象の特徴を表す対象情報を検出して、前記基準値と前記対象情報とに基づいて前記撮影画像内の対象までの距離を推定する、
情報処理装置。 - 請求項6に記載の情報処理装置であって、
前記距離推定手段は、前記対象情報として前記撮影画像内の対象の所定部位の大きさを検出して、前記基準値に対する前記対象の所定部位の大きさに基づいて前記撮影画像内の対象までの距離を推定する、
情報処理装置。 - 請求項7に記載の情報処理装置であって、
前記距離推定手段は、同一の前記撮影画像内の対象毎の、当該対象に対応して設定された前記基準値に対する当該対象の所定部位の大きさを相互に比較して、前記ゲートに対する前記対象画像内の対象間の遠近関係を判定する、
情報処理装置。 - 請求項1乃至8のいずれかに記載の情報処理装置であって、
前記ゲート制御手段は、前記撮影画像内の対象について相互に関連付けられた、当該対象に対する前記照合手段による照合結果と、前記ゲートから当該対象までの距離と、に基づいて、前記ゲートの開閉を制御する、
情報処理装置。 - ゲートに対する通過前領域を撮影した撮影画像を取得する撮像手段と、
前記撮影画像内の対象と、予め登録された対象と、の照合処理を行う照合手段と、
前記撮影画像内の対象の属性に基づいて設定された基準値を用いて前記ゲートから前記撮影画像内の対象までの距離を推定する距離推定手段と、
照合結果と前記撮影画像内の対象までの推定した距離とに基づいて前記ゲートの開閉を制御するゲート制御手段と、
を備えた情報処理システム。 - 情報処理装置に、
ゲートの通過前領域を撮影した撮影画像内の対象と、予め登録された対象と、の照合処理を行う照合手段と、
前記撮影画像内の対象の属性に基づいて設定された基準値を用いて前記ゲートから前記撮影画像内の対象までの距離を推定する距離推定手段と、
照合結果と前記撮影画像内の対象までの推定した距離とに基づいて前記ゲートの開閉を制御するゲート制御手段と、
を実現させるためのプログラム。 - ゲートの通過前領域を撮影した撮影画像内の対象と、予め登録された対象と、の照合処理を行う共に、
前記撮影画像内の対象の属性に基づいて設定された基準値を用いて前記ゲートから前記撮影画像内の対象までの距離を推定し、
照合結果と前記撮影画像内の対象までの推定した距離とに基づいて前記ゲートの開閉を制御する、
情報処理方法。 - 請求項12に記載の情報処理方法であって、
推定した前記撮影画像内の対象まで距離に基づいて前記照合処理を行い、
前記撮影画像内の対象までの距離に基づいて行われた前記照合処理の処理結果に基づいて前記ゲートの開閉を制御する、
情報処理方法。 - 請求項13に記載の情報処理方法であって、
前記照合処理の結果から予め登録されている対象の属性を前記撮影画像内の対象の属性として判別し、当該属性に対応する前記基準値を設定し、
前記基準値を用いて前記撮影画像内の対象までの距離を計測し、
前記撮影画像内の対象までの距離に基づいて前記ゲートの開閉を制御する、
情報処理方法。 - 請求項14に記載の情報処理方法であって、
前記照合処理の結果から前記撮影画像内の対象の属性を判別できなかった場合に、前記撮影画像内の対象の画像部分に対する属性解析処理に基づいて当該対象の属性を判別して、当該属性に対応する前記基準値を設定し、
前記基準値を用いて前記撮影画像内の対象までの距離を計測し、
前記撮影画像内の対象までの計測した距離に基づいて前記ゲートの開閉を制御する、
情報処理方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP19747339.0A EP3748577A4 (en) | 2018-01-31 | 2019-01-24 | INFORMATION PROCESSING DEVICE |
| US16/966,392 US20210340804A1 (en) | 2018-01-31 | 2019-01-24 | Information processing device |
| US17/579,782 US20220145690A1 (en) | 2018-01-31 | 2022-01-20 | Information processing device |
| US17/579,793 US20220136316A1 (en) | 2018-01-31 | 2022-01-20 | Information processing device |
| US17/579,787 US20220136315A1 (en) | 2018-01-31 | 2022-01-20 | Information processing device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018-014274 | 2018-01-31 | ||
| JP2018014274A JP2019132019A (ja) | 2018-01-31 | 2018-01-31 | 情報処理装置 |
Related Child Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US16/966,392 A-371-Of-International US20210340804A1 (en) | 2018-01-31 | 2019-01-24 | Information processing device |
| US17/579,787 Continuation US20220136315A1 (en) | 2018-01-31 | 2022-01-20 | Information processing device |
| US17/579,793 Continuation US20220136316A1 (en) | 2018-01-31 | 2022-01-20 | Information processing device |
| US17/579,782 Continuation US20220145690A1 (en) | 2018-01-31 | 2022-01-20 | Information processing device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019151116A1 true WO2019151116A1 (ja) | 2019-08-08 |
Family
ID=67479192
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/002334 WO2019151116A1 (ja) | 2018-01-31 | 2019-01-24 | 情報処理装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (4) | US20210340804A1 (ja) |
| EP (1) | EP3748577A4 (ja) |
| JP (1) | JP2019132019A (ja) |
| WO (1) | WO2019151116A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022020148A1 (en) * | 2020-07-23 | 2022-01-27 | Motorola Solutions, Inc. | Device and method for adjusting a configuration of a camera device |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006236244A (ja) * | 2005-02-28 | 2006-09-07 | Toshiba Corp | 顔認証装置および入退場管理装置 |
| JP2009053914A (ja) * | 2007-08-27 | 2009-03-12 | Seiko Epson Corp | 画像処理装置および画像処理方法 |
| JP2014016822A (ja) * | 2012-07-09 | 2014-01-30 | Canon Inc | 画像処理装置及びその制御方法、プログラム |
| JP2015001790A (ja) * | 2013-06-14 | 2015-01-05 | セコム株式会社 | 顔認証システム |
| JP2018014274A (ja) | 2016-07-22 | 2018-01-25 | トヨタ自動車株式会社 | 燃料電池システム |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007148987A (ja) * | 2005-11-30 | 2007-06-14 | Toshiba Corp | 顔認証システムおよび入退場管理システム |
| JP4836633B2 (ja) * | 2006-03-31 | 2011-12-14 | 株式会社東芝 | 顔認証装置、顔認証方法および入退場管理装置 |
| JP4984728B2 (ja) * | 2006-08-07 | 2012-07-25 | パナソニック株式会社 | 被写体照合装置および被写体照合方法 |
| US20080080748A1 (en) * | 2006-09-28 | 2008-04-03 | Kabushiki Kaisha Toshiba | Person recognition apparatus and person recognition method |
| KR101740231B1 (ko) * | 2010-11-17 | 2017-05-26 | 삼성전자주식회사 | 3차원 얼굴 위치 추정 방법 및 장치 |
| JP5794410B2 (ja) * | 2010-12-20 | 2015-10-14 | 日本電気株式会社 | 認証カード、認証システム、ガイダンス方法及びプログラム |
| JP6148064B2 (ja) * | 2013-04-30 | 2017-06-14 | セコム株式会社 | 顔認証システム |
| KR101569268B1 (ko) * | 2014-01-02 | 2015-11-13 | 아이리텍 잉크 | 얼굴 구성요소 거리를 이용한 홍채인식용 이미지 획득 장치 및 방법 |
| JP6238783B2 (ja) * | 2014-02-20 | 2017-11-29 | 大和ハウス工業株式会社 | 収納管理システム |
| GB2528319A (en) * | 2014-07-18 | 2016-01-20 | Ibm | Device display perspective adjustment |
| DE102014226858A1 (de) * | 2014-12-22 | 2016-06-23 | Robert Bosch Gmbh | Verfahren zum Betreiben einer aktivierbaren Sperrvorrichtung für eine Tür und/oder ein Fenster, Sicherungsvorrichtung für ein Fahrzeug, Fahrzeug |
| CN112850406A (zh) * | 2015-04-03 | 2021-05-28 | 奥的斯电梯公司 | 用于乘客运输的通行列表产生 |
| JP2017008638A (ja) * | 2015-06-24 | 2017-01-12 | パナソニックIpマネジメント株式会社 | 入退管理装置および入退管理方法 |
| US10489973B2 (en) * | 2015-08-17 | 2019-11-26 | Cubic Corporation | 3D face reconstruction from gate camera |
| WO2018025086A1 (en) * | 2016-08-05 | 2018-02-08 | Assa Abloy Ab | Method and system for automated physical access control system using biometric recognition coupled with tag authentication |
| US10997809B2 (en) * | 2017-10-13 | 2021-05-04 | Alcatraz AI, Inc. | System and method for provisioning a facial recognition-based system for controlling access to a building |
-
2018
- 2018-01-31 JP JP2018014274A patent/JP2019132019A/ja active Pending
-
2019
- 2019-01-24 US US16/966,392 patent/US20210340804A1/en not_active Abandoned
- 2019-01-24 EP EP19747339.0A patent/EP3748577A4/en not_active Withdrawn
- 2019-01-24 WO PCT/JP2019/002334 patent/WO2019151116A1/ja unknown
-
2022
- 2022-01-20 US US17/579,787 patent/US20220136315A1/en active Pending
- 2022-01-20 US US17/579,793 patent/US20220136316A1/en active Pending
- 2022-01-20 US US17/579,782 patent/US20220145690A1/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006236244A (ja) * | 2005-02-28 | 2006-09-07 | Toshiba Corp | 顔認証装置および入退場管理装置 |
| JP2009053914A (ja) * | 2007-08-27 | 2009-03-12 | Seiko Epson Corp | 画像処理装置および画像処理方法 |
| JP2014016822A (ja) * | 2012-07-09 | 2014-01-30 | Canon Inc | 画像処理装置及びその制御方法、プログラム |
| JP2015001790A (ja) * | 2013-06-14 | 2015-01-05 | セコム株式会社 | 顔認証システム |
| JP2018014274A (ja) | 2016-07-22 | 2018-01-25 | トヨタ自動車株式会社 | 燃料電池システム |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3748577A4 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022020148A1 (en) * | 2020-07-23 | 2022-01-27 | Motorola Solutions, Inc. | Device and method for adjusting a configuration of a camera device |
| US11475596B2 (en) | 2020-07-23 | 2022-10-18 | Motorola Solutions, Inc. | Device, method and system for adjusting a configuration of a camera device |
Also Published As
| Publication number | Publication date |
|---|---|
| US20220136316A1 (en) | 2022-05-05 |
| JP2019132019A (ja) | 2019-08-08 |
| US20210340804A1 (en) | 2021-11-04 |
| EP3748577A1 (en) | 2020-12-09 |
| EP3748577A4 (en) | 2021-03-24 |
| US20220136315A1 (en) | 2022-05-05 |
| US20220145690A1 (en) | 2022-05-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2019151117A1 (ja) | 情報処理装置 | |
| JP6409929B1 (ja) | 照合システム | |
| JP6148065B2 (ja) | 顔認証システム | |
| US20070291998A1 (en) | Face authentication apparatus, face authentication method, and entrance and exit management apparatus | |
| JP2014219703A (ja) | 顔認証システム | |
| JP7006668B2 (ja) | 情報処理装置 | |
| JP6544404B2 (ja) | 照合システム | |
| JP6947202B2 (ja) | 照合システム | |
| CN109196517B (zh) | 对照装置和对照方法 | |
| JP6915673B2 (ja) | 情報処理システム | |
| WO2019151116A1 (ja) | 情報処理装置 | |
| JP7400975B2 (ja) | 顔認証方法 | |
| JP7040578B2 (ja) | 照合システム | |
| JP6774036B2 (ja) | 照合システム | |
| JP7279774B2 (ja) | 情報処理装置 | |
| JP2021193268A (ja) | 情報処理システム | |
| WO2023145059A1 (ja) | 入場管理装置、入場管理方法およびプログラム記憶媒体 | |
| JP7298658B2 (ja) | 照合システム | |
| JP2023120264A (ja) | 照合システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19747339 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2019747339 Country of ref document: EP Effective date: 20200831 |