WO2019061473A1 - 无人机的机架组件及无人机 - Google Patents
无人机的机架组件及无人机 Download PDFInfo
- Publication number
- WO2019061473A1 WO2019061473A1 PCT/CN2017/104928 CN2017104928W WO2019061473A1 WO 2019061473 A1 WO2019061473 A1 WO 2019061473A1 CN 2017104928 W CN2017104928 W CN 2017104928W WO 2019061473 A1 WO2019061473 A1 WO 2019061473A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- arm
- link
- center
- convex portion
- elastic
- Prior art date
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U30/00—Means for producing lift; Empennages; Arrangements thereof
- B64U30/20—Rotors; Rotor supports
- B64U30/29—Constructional aspects of rotors or rotor supports; Arrangements thereof
- B64U30/293—Foldable or collapsible rotors or rotor supports
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U10/00—Type of UAV
- B64U10/10—Rotorcrafts
- B64U10/13—Flying platforms
- B64U10/14—Flying platforms with four distinct rotor axes, e.g. quadcopters
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Aviation & Aerospace Engineering (AREA)
- Toys (AREA)
- Transmission Devices (AREA)
- Seats For Vehicles (AREA)
Abstract
一种无人机及其机架组件,包括中心架,第一机臂(10)、第二机臂(20),同步装置(30)、锁定装置(40)和安装座(50);第一机臂(10)和第二机臂(20)相对于安装座(50)转动,安装座(50)相对中心架保持不动;同步装置(30)设于第一机臂(10)与第二机臂(20)间,同步装置(30)包括多个可相对转动的传动件,多个传动件转动使第一机臂(10)与第二机臂(20)同步转动;锁定装置(40)用于锁定至少一个传动件,至少一个传动件上设有凸部(31),锁定装置(40)包括弹性抵顶组件(41);弹性抵顶组件(41)抵顶同步装置(30)中的至少一个传动件上的凸部(31),以阻碍该具有凸部(31)的传动件转动;当在外力作用下该具有凸部(31)的传动件克服弹性抵顶组件(41)所施加的弹性阻力,该具有凸部(31)的传动件能继续转动。
Description
本发明实施例涉及无人机领域,尤其涉及一种无人机的机架组件及无人机。
无人飞行器常常用在航拍,远程空中监控,监测,侦查等领域。无人飞行器一般由中心架,机臂,动力组件,脚架以及作业需挂载的设备几部分组成。用于作业的设备一般设置在中心架的上方或下方,而脚架的作用是支撑整个飞行器,避免飞行器或者作业设备下挂时与地面接触。由于固定式机臂结构的无人飞行器体积较大,携带不便,将机臂进行折叠是一种较通用的方式。
由于无人飞行器在飞行时机臂至少应该被锁定,现有技术中的折叠式机臂的无人飞行器,只能实现一次锁定单个机臂,不能实现一次锁定两个机臂,导致操作效率较低。
发明内容
本发明实施例提供一种无人机的机架组件及无人机,以解决用于解决现有技术存在的不能一次锁定两个机臂,导致操作效率较低的问题。
本发明第一方面实施例提供一种无人机的机架组件,包括:中心架,与所述中心架可转动连接的第一机臂、第二机臂,以及用于将所述第一机臂与第二机臂同步锁定的锁定机构,所述锁定机构包括:同步装置、锁定装置和安装座;
所述第一机臂和所述第二机臂能相对于安装座转动,安装座相对于中心架保持不动;
所述同步装置设于所述第一机臂与所述第二机臂之间,所述同步装置包括多个可相对转动的传动件,多个传动件转动以使第一机臂与第二机臂同步转动;
所述锁定装置用于锁定多个传动件中的至少一个,所述同步装置中的至少一个传动件上设有凸部,所述锁定装置包括设置于所述安装座上的、用于所述凸部配合的弹性抵顶组件;
所述弹性抵顶组件抵顶所述同步装置中的至少一个传动件上的凸部,以阻碍该具有凸部的传动件转动;当在外力作用下该具有凸部的传动件克服所述弹性抵顶组件所施加的弹性阻力,该具有凸部的传动件能够继续转动。
本发明实施例提供的无人机的机架组件,通过设置同步装置,锁定装置和安装座,第一机臂和第二机臂相对于安装座转动,安装座相对于中心架不动,同步装置通过其多个可相对转动的传动件使第一机臂与第二机臂同步转动,同步装置中的至少一个传动件上设有凸部,锁定装置包括与凸部配合的弹性抵顶组件,当凸部转动到弹性抵顶组件被弹性抵顶组件抵顶时,在弹性抵顶组件的弹性阻力的作用下,该传动件无法转动,进而整个同步装置无法转动,第一机臂和第二机臂被锁定,而当外力克服弹性抵顶组件施加的弹性阻力时,则具有凸部的传动件能够继续转动,进而整个同步装置能够继续转动,第一机臂和第二机臂能够转动。由此实现了一次锁定两个机臂,提高了操作效率。
本发明第二方面实施例提供一种无人机的机架组件,包括:中心架,与所述中心架可转动连接的第一机臂、第二机臂,及用于将所述第一机臂与第二机臂同步锁定的锁定机构,所述锁定机构包括:同步装置、锁定装置和安装座;
所述第一机臂和所述第二机臂能相对于安装座转动,安装座相对于中心架保持不动;
所述同步装置包括中心连杆、第一机臂连杆组、第二机臂连杆组,所述中心连杆可转动地连接在所述安装座上;所述中心连杆的一端与所述第一机臂连杆组的首端铰接,所述第一机臂连杆组的末端与所述第一机臂铰接;所述中心连杆的另一端与所述第二机臂连杆组的首端铰接,所述第二机臂连杆组的末端与所述第二机臂铰接;所述中心连杆、第一机臂连杆组、第二机臂连杆组用于传递动力以驱动所述第一机臂和所述第二机臂同步转动;
所述锁定装置设于所述安装座与所述中心连杆之间,所述锁定装置包括锁定状态和解锁状态,在所述锁定状态下,所述锁定装置提供阻力以阻碍所
述中心连杆转动,直至中心连杆在外力作用下克服所述阻力,所述锁定装置切换为解锁状态,所述中心连杆能够相对于安装座转动。
本发明实施例提供的无人机的机架组件,通过设置同步装置,锁定装置和安装座,第一机臂和第二机臂相对于安装座转动,安装座相对于中心架保持不动,同步装置包括中心连杆、第一机臂连杆组和第二机臂连杆组,中心连杆可转动地连接在安装座上,第一机臂、第一机臂连杆组、中心连杆、第二机臂连杆组和第二机臂顺次铰接形成连杆传动的形式,锁定装置设在安装座和中心连杆之间,通过提供阻力阻碍中心连杆转动,第一机臂和第二机臂处于锁定状态,直至中心连杆克服阻力继续转动,第一机臂和第二机臂处于解锁状态。进而,由此实现了一次锁定两个机臂,提高了操作效率。
本发明第三方面实施例提供一种无人机,包括:机架组件以及设于所述机架组件上的动力装置,所述动力装置用于提供飞行动力给所述无人机;
其中,机架组件,包括:中心架,与所述中心架可转动连接的第一机臂、第二机臂,以及用于将所述第一机臂与第二机臂同步锁定的锁定机构,所述锁定机构包括:同步装置、锁定装置和安装座;
所述第一机臂和所述第二机臂能相对于安装座转动,安装座相对于中心架保持不动;
所述同步装置设于所述第一机臂与所述第二机臂之间,所述同步装置包括多个可相对转动的传动件,多个传动件转动以使第一机臂与第二机臂同步转动;
所述锁定装置用于锁定多个传动件中的至少一个,所述同步装置中的至少一个传动件上设有凸部,所述锁定装置包括设置于所述安装座上的、用于所述凸部配合的弹性抵顶组件;
所述弹性抵顶组件抵顶所述同步装置中的至少一个传动件上的凸部,以阻碍该具有凸部的传动件转动;当在外力作用下该具有凸部的传动件克服所述弹性抵顶组件所施加的弹性阻力,该具有凸部的传动件能够继续转动。
本发明实施例提供的无人机,通过设置同步装置,锁定装置和安装座,第一机臂和第二机臂相对于安装座转动,同步装置通过其多个可相对转动的传动件使第一机臂与第二机臂同步转动,同步装置中的至少一个传动件
上设有凸部,锁定装置包括与凸部配合的弹性抵顶组件,当凸部转动到弹性抵顶组件被弹性抵顶组件抵顶时,在弹性抵顶组件的弹性阻力的作用下,该传动件无法转动,进而整个同步装置无法转动,第一机臂和第二机臂被锁定,而当外力克服弹性抵顶组件施加的弹性阻力时,则具有凸部的传动件能够继续转动,进而整个同步装置能够继续转动,第一机臂和第二机臂能够转动。由此实现了一次锁定两个机臂,提高了操作效率。
本发明第四方面实施例提供的无人机包括:机架组件以及设于所述机架组件上的动力装置,所述动力装置用于提供飞行动力给所述无人机;
其中机架组件包括:中心架,与所述中心架可转动连接的第一机臂、第二机臂,及用于将所述第一机臂与第二机臂同步锁定的锁定机构,所述锁定机构包括:同步装置、锁定装置和安装座;
所述第一机臂和所述第二机臂相对于安装座转动,安装座相对于中心架保持不动;
所述同步装置包括中心连杆、第一机臂连杆组、第二机臂连杆组,所述中心连杆可转动地连接在所述安装座上;所述中心连杆的一端与所述第一机臂连杆组的首端铰接,所述第一机臂连杆组的末端与所述第一机臂铰接;所述中心连杆的另一端与所述第二机臂连杆组的首端铰接,所述第二机臂连杆组的末端与所述第二机臂铰接;所述中心连杆、第一机臂连杆组、第二机臂连杆组用于传递动力以驱动所述第一机臂和所述第二机臂同步转动;
所述锁定装置设于所述安装座与所述中心连杆之间,所述锁定装置包括锁定状态和解锁状态,在所述锁定状态下,所述锁定装置提供阻力以阻碍所述中心连杆转动,直至中心连杆在外力作用下克服所述阻力,所述锁定装置切换为解锁状态,所述中心连杆能够相对于安装座转动。
本发明实施例提供的无人机,通过设置同步装置,锁定装置和安装座,第一机臂和第二机臂相对于安装座转动,同步装置包括中心连杆、第一机臂连杆组和第二机臂连杆组,中心连杆可转动地连接在安装座上,第一机臂、第一机臂连杆组、中心连杆、第二机臂连杆组和第二机臂顺次铰接形成连杆传动的形式,锁定装置设在安装座和中心连杆之间,通过提供阻力阻碍中心连杆转动,第一机臂和第二机臂处于锁定状态,直至中心连杆克服阻力继续转动,第一机臂和第二机臂处于解锁状态。进而,由此实现了
一次锁定两个机臂,提高了操作效率。
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
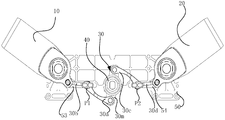
图1为本发明实施例所提供的无人机的机架组件的结构示意图;
图2为本发明实施例所提供的无人机的机架组件的连接结构示意图;
图3为本发明实施例所提供的无人机的机架组件的爆炸图;
图4为本发明实施例所提供的无人机的机架组件的一种锁定原理图;
图5为本发明实施例所提供的无人机的机架组件的另一种锁定原理图;
图6为本发明实施例所提供的无人机的结构示意图。
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
下面结合附图,对本发明的一些实施方式作详细说明。在不冲突的情况下,下述的实施例及实施例中的特征可以相互组合。
实施例一
图1为本发明实施例所提供的无人机的机架组件的结构示意图;图2为本发明实施例所提供的无人机的机架组件的连接结构示意图;图3为本发明实施例所提供的无人机的机架组件的爆炸图;图4为本发明实施例所提供的无人机的机架组件的一种锁定原理图;
请参照附图1-附图4,本实施例提供的无人机的机架组件,包括:中心架,与中心架可转动连接的第一机臂10、第二机臂20,以及用于将第一机臂10与第二机臂20同步锁定的锁定机构,锁定机构包括:同步装置30、锁定装置40和安装座50。第一机臂10和第二机臂20可以分别通过机臂转轴固定在中心架上。
其中,第一机臂10和第二机臂20能够相对于安装座50转动,安装座50相对于中心架保持不动。
具体的,第一机臂10和第二机臂20相对于安装座50转动,安装座50相对于中心架保持不动。具体至少包括两种实施方式:
安装座50可以通过转轴与第一机臂10和第二机臂20可转动连接,更具体的,安装座50的转轴可以与第一机臂10和第二机臂20与中心架的转轴同轴,如此一来,当第一机臂10和第二机臂20相对于中心架转动时,安装座50可以不转动。
具体的,例如,安装座50可以包括相对设置的上壳体(图中未示出)、下壳体51、第一机臂10和第二机臂20可以位于上壳体和下壳体51之间。上壳体的一端与下壳体51的一端,以及第一机臂10、中心架可以通过第一机臂转轴a可转动地连接。上壳体的另一端与下壳体51的另一端,以及第二机臂20、中心架可以通过第二机臂转轴b可转动地连接。
或者,安装座50可以直接固定在中心架上,例如焊接在中心架上,或者与中心架通过连接件固定连接,或者与中心架一体成型,第一机臂10和第二机臂20相对于中心架转动时,安装座50可以不转动。
上述两种方式均可以实现,当第一机臂10和第二机臂20被锁定在安装座50上时,第一机臂10和第二机臂20也无法相对于中心架转动。
同步装置30设于第一机臂10与第二机臂20之间,同步装置30包括多个可相对转动的传动件,多个传动件转动以使第一机臂10与第二机臂20同步转动。在本实施例中,多个可相对转动的传动件可以为多个相互啮合的齿
轮,多个相互铰接的连杆,或者其他可以传递动力以使得第一机臂10和第二机臂20可以同步转动的传动件,在此本实施例不特别限定,具体可根据实际情况选用。
锁定装置40用于锁定多个传动件中的至少一个,同步装置30中的至少一个传动件上设有凸部31,锁定装置40包括设置于安装座50上的、用于凸部31配合的弹性抵顶组件41。其中,传动件上的凸部31可以包括一个,或多个。其中,弹性抵顶组件41可以可拆卸或不可拆卸的方式固定在安装座50上,例如螺接、卡接、焊接、铆接等。
可以理解的是,锁定装置40用于锁定多个传动件中的至少一个,是指,多个传动件中的至少一个可以被锁定装置40锁定,而不应理解为多个传动件中的任意一个均可为锁定装置40锁定。
弹性抵顶组件41抵顶同步装置30中的至少一个传动件上的凸部31,以阻碍该具有凸部31的传动件转动;当在外力作用下该具有凸部的传动件克服弹性抵顶组件41所施加的弹性阻力,该具有凸部31的传动件能够继续转动。当该具有凸部31的传动件能够继续转动时,从而同步装置30内的动力传递可以得以继续,第一机臂10和第二机臂20能够通过同步装置30同步传动。
可以理解的是,在设计时,可以设计当凸部31转动到某一角度时,能够被弹性抵顶组件41抵顶,在这个角度下,第一机臂10和第二机臂20可以处于展开状态,第一机臂10和第二机臂20在展开状态下被锁定,而当克服弹性抵顶组件41的阻力之后,第一机臂10和第二机臂20可以自由转动,例如可以自由转动至折叠状态。
其中,第一机臂10与第二机臂20可以相对转动至最小预设夹角,例如第一机臂10与第二机臂20转动至相互平行,即夹角为零。在第一机臂10与第二机臂20相对转动至最小预设夹角时,第一机臂10、第二机臂20处于折叠状态。此处的折叠状态是第一机臂10和第二机臂20相对呈折叠状态,而不应理解为第一机臂10和第二机臂20分别各自呈折叠状态。
第一机臂10与第二机臂20可以相对转动至最大预设夹角,例如第一机臂10与第二机臂20转动夹角呈180度。在第一机臂10与第二机臂20相对转动至最大预设夹角时,第一机臂10、第二机臂20处于展开状态。此处的
展开状态是第一机臂10和第二机臂20相背离呈展开状态,而不应理解为第一机臂10和第二机臂20分别各自呈展开状态。
当然,可以理解的是,在第一机臂10和第二机臂20处于折叠状态时,第一机臂10与第二机臂20之间的夹角还可以大于零,在第一机臂10和第二机臂20处于展开状态时,第一机臂10与第二机臂20之间的夹角还可以小于180度。具体可根据机臂数量和布置位置,以及预设的展开形式而确定,在此,本实施例不做限定。
另外,在本实施例中,锁定装置40可以包括两个,且两个锁定装置40可以分别设置在具有凸部31的传动件的两侧,由此可以进一步提高锁定效果。
本发明实施例提供的无人机的机架组件,通过设置同步装置,锁定装置和安装座,第一机臂和第二机臂相对于安装座转动,安装座相对于中心架不动,同步装置通过其多个可相对转动的传动件使第一机臂与第二机臂同步转动,同步装置中的至少一个传动件上设有凸部,锁定装置包括与凸部配合的弹性抵顶组件,当凸部转动到弹性抵顶组件被弹性抵顶组件抵顶时,在弹性抵顶组件的弹性阻力的作用下,该传动件无法转动,进而整个同步装置无法转动,第一机臂和第二机臂被锁定,而当外力克服弹性抵顶组件施加的弹性阻力时,则具有凸部的传动件能够继续转动,进而整个同步装置能够继续转动,第一机臂和第二机臂能够转动。由此实现了一次锁定两个机臂,提高了操作效率。
实施例二
本实施例基于实施例一,进一步的,如图3和图4所示,弹性抵顶组件41可以包括与凸部31配合的配合凹部411。当凸部31位于配合凹部411内时,锁定装置40将该具有凸部31的传动件维持在锁定状态。配合凹部411的形状可以完全与凸部31相匹配,或者可以略大于凸部31,当凸部31转动至卡入配合凹部411时,凸部31能够在配合凹部411的壁面限制下,更好地维持锁定状态,提高锁定的稳固性。
在该具有凸部31的传动件转动至凸部31逐渐脱离配合凹部411的过程中,弹性抵顶组件41逐渐被压缩,该具有凸部31的传动件从锁定状态切换至解锁状态。当该具有凸部31的传动件朝向脱离配合凹部411的方向转动的
过程中,由于配合凹部411是设置在弹性抵顶组件41上,凸部31挤压弹性抵顶组件41使得弹性抵顶组件41被压缩,弹性回复力越来越大,也就是说弹性抵顶组件41阻碍凸部31脱离配合凹部411,凸部31需要被更大的外力作用下才能脱离配合凹部411,当外力足够大时,凸部31从配合凹部411中脱离,当具有凸部31的传动件继续在较大的外力作用下转动,该具有凸部31的传动件所受的弹性抵顶组件41所施加的弹性阻力越来越小,该具有凸部31的传动件可转动,第一机臂10和第二机臂20进而也能转动。
在该具有凸部31的传动件转动至凸部31逐渐进入配合凹部31的过程中,弹性抵顶组件41逐渐被释放,该具有凸部31的传动件逐渐从解锁状态切换至锁定状态。在具有凸部31的传动件在转入至配合凹部31的过程中,弹性抵顶组件41逐渐被释放,弹性抵顶组件41有利于凸部31进入配合凹部31中,在凸部31完全转入至配合凹部31中以及凸部31转出配合凹部31之前,弹性抵顶组件41处于被释放的状态,在该过程中,凸部31能够在配合凹部31中顺畅转动,因此,在该过程中,该具有凸部31的传动件处于解锁状态,第一机臂10和第二机臂20能够顺利转动,直至凸部31完全转入至配合凹部31中到达锁定状态。
本实施例通过在弹性抵顶组件41上设置与凸部31配合的配合凹部411,从而能够进一步提高锁定效果,提高锁定后的稳固性。
进一步的,如图3和图4所示,本实施例中的凸部31可以沿平行于自身所在的传动件的转动轴线方向向外凸出。
一个传动件上的凸部31可以包括多个,凸部41所在端面上还形成有多个凹部32,多个凸部31和凹部32连续排列形成波浪状端面W1。每个相邻的凸部31和凹部32之间均弧面过渡。弹性抵顶组件41上形成有用于与波浪状端面配合的波浪状配合面W2。如图4所示状态下,波浪状端面W1与波浪状配合面W2配合,以在具有凸部31的传动件逆时针转动过程中,弹性抵顶组件41逐渐压缩,阻碍该具有凸部31的传动件转动,可在一定程度上使第一机臂10和第二机臂20保持当前位置。当继续加大力度使具有凸部31的传动件转过波浪状配合面W2的最高点后,弹性抵顶组件41逐渐恢复形变使得波浪状端面W1与波浪状配合面W2的接触面有利于旋转,当具有凸部31的传动件旋转至波浪状配合面W2的最低的位置,将重复进入阻碍旋转的阶段,
即进入锁定状态。
通过波浪状端面W1与波浪状配合面W2的配合,使得整个同步装置30能够在多个旋转角度下进入锁定状态,即,可以使得第一机臂10和第二机臂20能够在多个不同夹角状态下进而锁定状态。
如图3和图4所示,优选的,弹性抵顶组件41可以包括用于与凸部31配合的刚性施力件41a,以及设置于刚性施力件41a与安装座50之间的弹性元件41b。弹性元件41b可以为轴向弹性件,具体可为轴向伸缩弹簧,弹性元件41b可以一端与安装座50固定连接,另一端与刚性施力件41a固定连接。当然,还可以是,弹性元件41b可以一端与安装座50或刚性施力件41a固定连接,弹性元件41b的另一端与刚性施力件41a或安装座50抵接。
本实施例通过弹性元件41b提供弹性阻力,而通过刚性施力件41a提供与具有凸部31的传动件的接触面,结构简单,且功能稳定。
当然,可以选择的是,弹性抵顶组件41还可以为弹片、橡胶等一系列能够提供弹性阻力的零部件。
更进一步的,在安装座50上还可以固定有导向轴52,刚性施力件41a和弹性元件41b可以套设在导向轴52的外侧。具体的,导向轴52的外径可以略大于刚性施力件41a和弹性元件41b的孔径,由此,既可以不影响刚性施力件41a沿导向轴52轴向运动,也能对弹性元件41b进行限位,防止弹性元件41b摆动。
通过导向轴52的设置,能够保证弹性抵顶组件41沿预定方向对同步装置30中具有凸部31的传动件施加弹性阻力,能稳定保持具有凸部31的传动件与刚性施力件41a之间的良好接触。
另外,请继续参照附图3和附图4,在导向轴52上可以形成有用于阻碍刚性施力件41a周向转动的阻挡部521。当具有凸部31的传动件在弹性抵顶组件41的抵顶下转动时,由于作用力与反作用力的相互作用,具有凸部31的传动件可能会带动刚性施力件41a转动,尤其在弹性元件41b仅一端与安装座50或刚性施力件41a连接的情况下,若刚性施力件41a也跟着具有凸部31的传动件旋转,则无法达到阻碍具有凸部31的传动件转的目的。通过阻挡部521阻碍刚性施力件41a的转动,使得刚性施力件41a仅能够沿导向轴52轴向运动,使得锁定装置40的锁定效果更佳可靠。
而本实施例中,阻挡部521的具体结构形式可以有很多种,下面列举几种形式:
具体的,阻挡部521可以为设于导向轴52的外侧壁上的、沿轴向方向延伸的滑轨(图中未示出),对应的,刚性施力件41a的内侧壁上设有与滑轨配合的滑槽(图中未示出)。
当然,也可以反过来,即,阻挡部521为设于导向轴外侧壁上的、沿轴向方向延伸的滑槽(图中未示出),对应的,刚性施力件41a的内侧壁上设有与滑槽配合的滑轨(图中未示出)。
或者,例如,如图3和图4所示,导向轴52的横截面为非圆形,刚性施力件41a的内侧壁形状与导向轴52的横截面形状相匹配。例如,导向轴52沿与轴向方向平行的方向切割形成纵截面,使得导向轴52呈非圆形,而该被切割后形成的纵截面形成阻挡部521。
阻挡部521的具体形式除了上述描述的之外,还有很多,本领域技术人员可以根据实际情况而具体设计,在此不一一赘述。
实施例三
本实施例在实施例一或实施例二的基础上,对同步装置30进行进一步限定,同步装置30可以包括连杆传动组件。
在本实施例中,优选的,连杆传动组件中的其中至少一个连杆的转轴固定于安装座50上。
如图2和图3所示,连杆传动组件可以包括中心连杆30m、第一过渡连杆30a、第一机臂连杆30b、第二过渡连杆30c、第二机臂连杆30d;在安装座50可以上形成有第一直线滑道53和第二直线滑道54;中心连杆30m可以通过转轴可转动地连接在安装座50上。
第一过渡连杆30a的首端与中心连杆30m的一端铰接,第一过渡连杆30a的末端与第一机臂连杆30b的首端铰接;第一机臂连杆30b的末端与第一机臂铰接,第一过渡连杆30a与第一机臂连杆30b的铰接处滑设于第一直线滑道内53。
第二过渡连杆30c的首端与中心连杆30m的另一端铰接,第二过渡连杆30c的末端与第二机臂连杆30d的首端铰接,第二机臂连杆30d的末端与第二机臂20铰接,第二过渡连杆与第二机臂连杆30d的铰接处滑设于第二直线滑
道54内。
通过上述连杆形式,第一机臂10、第一机臂连杆30b、第一过渡连杆30a、中心连杆30m、第二过渡连杆30c、第二机臂连杆30d、第二机臂20,共同构成七连杆结构。
在本实施例中,需要说明的是,第一机臂连杆30b与第一机臂10的铰接轴与第一机臂连杆30b相对于中心架转动的第一机臂转轴a不同轴,第二机臂连杆30d与第二机臂20的铰接轴与第二机臂连杆30d相对于中心架转动的第二机臂转轴b不同轴。
本实施例所提供的无人机的机架组件的通过连杆形式的同步装置带动第一机臂10和第二机臂20同步转动的大致工作原理如下:
首先,以转动中心连杆30m为例,例如在图2所示,当沿顺时针方向转动中心连杆30m,中心连杆30m推动第一过渡连杆30a转动,第一过渡连杆30a的末端在第一直线滑道53内向左滑动,带动第一机臂连杆30b逆时针转动,第一机臂10顺时针转动;同时,中心连杆30m推动第二过渡连杆30c转动,第二过渡连杆30c的末端在第二直线滑道54内向右滑动,带动第二机臂连杆30d顺时针转动,第二机臂20逆时针转动,即实现了第一机臂10和第二机臂30同时朝向夹角相对减小的方向转动,至折叠状态。
当在第一机臂10和第二机臂30处于折叠状态后,沿逆时针方向转动中心连杆30m,中心连杆30m推动第一过渡连杆30a转动,第一过渡连杆30a的末端在第一直线滑道53内向右滑动,带动第一机臂连杆30b顺时针转动,第一机臂10逆时针转动;同时,中心连杆30m推动第二过渡连杆30c转动,第二过渡连杆30c的末端在第二直线滑道54内向左滑动,带动第二机臂连杆30d逆时针转动,第二机臂20顺时针转动,即实现了第一机臂10和第二机臂30同时朝向夹角相对增大的方向转动。
同理,当转动第一机臂10或第二机臂20时,可以通过上述的传动方式将动力从第一机臂10传递到第二机臂20,或者从第二机臂20传递到第一机臂10。其具体传递过程,在此不再赘述。
具体的,在本实施例中,第一直线滑道53可以包括直线凹槽和/或直线通孔;及/或,第二直线滑道54包括直线凹槽和/或直线通孔。
在本实施例中,中心连杆30m上形成有凸部31。锁定装置40锁定中心
连杆30m上的凸部31以阻碍中心连杆30m转动,以阻断同步装置30的动力传递,实现第一机臂10与第二机臂20的锁定。
实施例四
本实施例在实施例一或实施例二的基础上,对同步装置30进行进一步限定,提供一种与实施例三不同的实施方式,具体的,连杆传动组件包括中心连杆30m、第一机臂连杆、第二机臂连杆;中心连杆30m通过转轴可转动地连接在安装座50上。第一机臂连杆的首端与中心连杆30m的一端铰接,第一机臂连杆的末端与第一机臂10铰接。第二机臂连杆的首端与中心连杆30m的另一端铰接,第二机臂连杆的末端与第二机臂20铰接。
即,在实施例三中,省去第一过滤连杆30a、第二过渡连杆30c以及第一直线滑道53和第二直线滑道54,同样也可以实现将第一机臂10和第二机臂20的同步转动,该种实施例的方式其零部件少,结构简单。
实施例五
本实施例在实施例一或实施例二的基础上,对同步装置30进行进一步限定,提供一种与实施例三和实施例四不同的实施方式。
同步装置30可以包括啮合齿轮对,啮合齿轮对包括与第一机臂10固定连接的第一齿轮,以及与第二机臂20固定连接的第二齿轮,第一齿轮与第二齿轮啮合传动。
本实施例是通过齿轮啮合的形式实现第一机臂10和第二机臂20之间的同步转动,例如,当第一机臂10逆时针转动时,带动第一齿轮逆时针转动,第一齿轮带动第二齿轮顺时针转动,第二齿轮带动第二机臂顺时针转动。
当锁定装置40锁定住任意一个齿轮使其不能转动时,第一机臂10和第二机臂20均不可转动,从而实现锁定。
通过齿轮啮合对的方式同样可以实现第一机臂10和第二机臂的同步转动。
实施例六
本实施例提供另外一种无人机的机架组件,请参照附图1-附图4,本实施例提供的包括:中心架,与中心架可转动连接的第一机臂10、第二机臂20,及用于将第一机臂10与第二机臂20同步锁定的锁定机构,锁定机构包括:同步装置30、锁定装置40和安装座50。第一机臂10和第二机臂20可
以分别通过机臂转轴固定在中心架上。
第一机臂10和第二机臂20相对于安装座50转动,安装座50相对于中心架保持不动。
具体的,第一机臂10和第二机臂20相对于安装座50转动,安装座50相对于中心架保持不动。具体至少包括两种实施方式:
安装座50可以通过转轴与第一机臂10和第二机臂20可转动连接,更具体的,安装座50的转轴可以与第一机臂10和第二机臂20与中心架的转轴同轴,如此一来,当第一机臂10和第二机臂20相对于中心架转动时,安装座50可以不转动。
具体的,例如,安装座50可以包括相对设置的上壳体(图中未示出)、下壳体51、第一机臂10和第二机臂20可以位于上壳体和下壳体51之间。上壳体的一端与下壳体51的一端,以及第一机臂10、中心架可以通过第一机臂转轴a可转动地连接。上壳体的另一端与下壳体51的另一端,以及第二机臂20、中心架可以通过第二机臂转轴b可转动地连接。
或者,安装座50可以直接固定在中心架上,例如焊接在中心架上,或者与中心架通过连接件固定连接,或者与中心架一体成型,第一机臂10和第二机臂20相对于中心架转动时,安装座50可以不转动。
上述两种方式均可以实现,当第一机臂10和第二机臂20被锁定在安装座50上时,第一机臂10和第二机臂20也无法相对于中心架转动。
同步装置30包括中心连杆30m、第一机臂连杆组、第二机臂连杆组,中心连杆30m可转动地连接在安装座50上;中心连杆30m的一端与第一机臂连杆组的首端铰接,第一机臂连杆组的末端与第一机臂10铰接;中心连杆30m的另一端与第二机臂连杆组的首端铰接,第二机臂连杆组的末端与第二机臂20铰接;中心连杆30m、第一机臂连杆组、第二机臂连杆组用于传递动力以驱动第一机臂10和第二机臂20同步转动。
锁定装置40设于安装座50与中心连杆30m之间,锁定装置40包括锁定状态和解锁状态,在锁定状态下,锁定装置40提供阻力以阻碍中心连杆30m转动,直至中心连杆30m在外力作用下克服阻力,锁定装置40切换为解锁状态,中心连杆能够相对于安装座50转动。在本实施例中,锁定装置40的锁定方式可以有多种,例如,卡持在中心连杆30m上,使中心连杆30m
无法转动,或者,通过摩擦阻力或弹性阻力的方式阻碍中心连杆30m转动,其实现方式有多种,在此,本实施例不做限定。
可以理解的是,在设计时,可以设计当中心连杆30m转动到某一角度时,能够被锁定装置锁定,在这个角度下,第一机臂10和第二机臂20可以处于展开状态,第一机臂10和第二机臂20在展开状态下被锁定,而当去除同步装置的锁定之后,第一机臂10和第二机臂20可以自由转动,例如可以自由转动至折叠状态。
其中,第一机臂10与第二机臂20可以相对转动至最小预设夹角,例如第一机臂10与第二机臂20转动至相互平行,即夹角为零。在第一机臂10与第二机臂20相对转动至最小预设夹角时,第一机臂10、第二机臂20处于折叠状态。此处的折叠状态是第一机臂10和第二机臂20相对呈折叠状态,而不应理解为第一机臂10和第二机臂20分别各自呈折叠状态。
第一机臂10与第二机臂20可以相对转动至最大预设夹角,例如第一机臂10与第二机臂20转动夹角呈180度。在第一机臂10与第二机臂20相对转动至最大预设夹角时,第一机臂10、第二机臂20处于展开状态。此处的展开状态是第一机臂10和第二机臂20相背离呈展开状态,而不应理解为第一机臂10和第二机臂20分别各自呈展开状态。
当然,可以理解的是,在第一机臂10和第二机臂20处于折叠状态时,第一机臂10与第二机臂20之间的夹角还可以大于零,在第一机臂10和第二机臂20处于展开状态时,第一机臂10与第二机臂20之间的夹角还可以小于180度。具体可根据机臂数量和布置位置,以及预设的展开形式而确定,在此,本实施例不做限定。
本实施例提供的无人机的机架组件,通过设置同步装置,锁定装置和安装座,第一机臂和第二机臂相对于安装座转动,同步装置包括中心连杆、第一机臂连杆组和第二机臂连杆组,中心连杆可转动地连接在安装座上,第一机臂、第一机臂连杆组、中心连杆、第二机臂连杆组和第二机臂顺次铰接形成连杆传动的形式,锁定装置设在安装座和中心连杆之间,通过提供阻力阻碍中心连杆转动,第一机臂和第二机臂处于锁定状态,直至中心连杆克服阻力继续转动,第一机臂和第二机臂处于解锁状态。进而,由此实现了一次锁定两个机臂,提高了操作效率。
实施例七
本实施例在实施例六的基础上,对第一机臂连杆组和第二机臂连杆组进行进一步限定,第一机臂连杆组包括:第一过渡连杆30a,第一机臂连杆30b,以及形成于安装座50上的第一直线滑道53;第一过渡连杆30a的首端与中心连杆30m的一端铰接,第一过渡连杆30a的末端与第一机臂连杆30b的首端铰接;第一机臂连杆30b的末端与第一机臂铰接,第一过渡连杆30a与第一机臂连杆30b的铰接处滑设于第一直线滑道内53。
第二机臂连杆组包括:第二过渡连杆30c,第二机臂连杆30d,以及形成于安装座50上的第二直线滑道54;第二过渡连杆30c的首端与中心连杆30m的另一端铰接,第二过渡连杆30c的末端与第二机臂连杆30d的首端铰接,第二机臂连杆30d的末端与第二机臂20铰接,第二过渡连杆与第二机臂连杆30d的铰接处滑设于第二直线滑道54内。
通过上述连杆形式,第一机臂10、第一机臂连杆30b、第一过渡连杆30a、中心连杆30m、第二过渡连杆30c、第二机臂连杆30d、第二机臂20,共同构成七连杆结构。
在本实施例中,需要说明的是,第一机臂连杆30b与第一机臂10的铰接轴与第一机臂连杆30b相对于中心架转动的第一机臂转轴a不同轴,第二机臂连杆30d与第二机臂20的铰接轴与第二机臂连杆30d相对于中心架转动的第二机臂转轴b不同轴。
本实施例所提供的无人机的机架组件的同步装置带动第一机臂10和第二机臂20同步转动的大致工作原理如下:
首先,以转动中心连杆30m为例,例如在图2所示,当沿顺时针方向转动中心连杆30m,中心连杆30m推动第一过渡连杆30a转动,第一过渡连杆30a的末端在第一直线滑道53内向左滑动,带动第一机臂连杆30b逆时针转动,第一机臂10顺时针转动;同时,中心连杆30m推动第二过渡连杆30c转动,第二过渡连杆30c的末端在第二直线滑道54内向右滑动,带动第二机臂连杆30d顺时针转动,第二机臂20逆时针转动,即实现了第一机臂10和第二机臂30同时朝向夹角相对减小的方向转动,至折叠状态。
当在第一机臂10和第二机臂30处于折叠状态后,沿逆时针方向转动中心连杆30m,中心连杆30m推动第一过渡连杆30a转动,第一过渡连杆30a
的末端在第一直线滑道53内向右滑动,带动第一机臂连杆30b顺时针转动,第一机臂10逆时针转动;同时,中心连杆30m推动第二过渡连杆30c转动,第二过渡连杆30c的末端在第二直线滑道54内向左滑动,带动第二机臂连杆30d逆时针转动,第二机臂20顺时针转动,即实现了第一机臂10和第二机臂30同时朝向夹角相对增大的方向转动。
同理,当转动第一机臂10或第二机臂20时,可以通过上述的传动方式将动力从第一机臂10传递到第二机臂20,或者从第二机臂20传递到第一机臂10。其具体传递过程,在此不再赘述。
具体的,在本实施例中,第一直线滑道53可以包括直线凹槽和/或直线通孔;及/或,第二直线滑道54包括直线凹槽和/或直线通孔。
进一步的,在第一过渡连杆30a与第一机臂连杆30b的铰接处设有第一滑块P1,第一滑块P1与第一直线滑道53配合;及/或,第二过渡连杆30a与第二机臂连杆30d的铰接处设有第二滑块P2,第二滑块P2与第二直线滑道54配合。
实施例八
本实施例在实施例六的基础上,提供一种区别于实施例七的同步装置30的实施例,具体的,第一机臂连杆组至多包括第一机臂连杆;第二机臂连杆组至多包括第二机臂连杆;中心连杆30m通过转轴可转动地连接在安装座50上;
第一机臂连杆的首端与中心连杆30m的一端铰接,第一机臂连杆的末端与第一机臂10铰接。第二机臂连杆的首端与中心连杆30m的另一端铰接,第二机臂连杆的末端与第二机臂20铰接。
即,在实施例七中,省去第一过滤连杆30a、第二过渡连杆30c以及第一直线滑道53和第二直线滑道54,同样也可以实现将第一机臂10和第二机臂20的同步转动,该种实施例的方式其零部件少,结构简单。
实施例九
本实施例在实施例六或实施例七或实施例八的基础上,对锁定装置40的锁定方式进行进一步限定,具体的,中心连杆30m可以包括凸部31;锁定装置40包括设置于安装座50上的、用于凸部31配合的弹性抵顶组件41;弹性抵顶组件41抵顶中心连杆30m上的凸部31,以阻碍中心连杆30m转
动;当在外力作用下中心连杆30m克服弹性抵顶组件41所施加的弹性阻力,中心连杆30m能够继续转动。当该中心连杆30m能够继续转动时,从而同步装置30内的动力传递可以得以继续,第一机臂10和第二机臂20能够通过同步装置30同步传动。
其中,弹性抵顶组件41可以可拆卸或不可拆卸的方式固定在安装座50上,例如螺接、卡接、焊接、铆接等。
本实施例的锁定装置40利用弹性阻力对中心连杆30m进行锁定,结构简单,操作方便。
另外,需要说明的是,在本实施例中,锁定装置40可以包括两个,且两个锁定装置40可以分别设置在中心连杆30m的两侧,由此可以进一步提高锁定效果。
实施例十
本实施例在实施例九的基础上,如图3和图4所示,进一步的,弹性抵顶组件41可以包括与凸部31配合的配合凹部411。当凸部31位于配合凹部411内时,锁定装置40将中心连杆30m维持在锁定状态。配合凹部411的形状可以完全与凸部31相匹配,或者可以略大于凸部31,当凸部31转动至卡入配合凹部411时,凸部31能够在配合凹部411的壁面限制下,更好地维持锁定状态,提高锁定的稳固性。
在中心连杆30m转动至凸部31逐渐脱离配合凹部411的过程中,弹性抵顶组件41逐渐被压缩,中心连杆30m从锁定状态切换至解锁状态。当中心连杆30m的转动使凸部31朝向脱离配合凹部411的方向转动的过程中,由于配合凹部411是设置在弹性抵顶组件41上,凸部31挤压弹性抵顶组件41使得弹性抵顶组件41被压缩,弹性回复力越来越大,也就是说弹性抵顶组件41阻碍凸部31脱离配合凹部411,凸部31需要被更大的外力作用下才能脱离配合凹部411,当外力足够大时,凸部31从配合凹部411中脱离,当中心连杆30m继续在较大的外力作用下转动,中心连杆30m所受的弹性抵顶组件41所施加的弹性阻力越来越小,中心连杆30m可转动,第一机臂10和第二机臂20进而也能转动。
在中心连杆30m转动至凸部31逐渐进入配合凹部31的过程中,弹性抵顶组件41逐渐被释放,中心连杆30m逐渐从解锁状态切换至锁定状态。在
中心连杆30m在转入至配合凹部31的过程中,弹性抵顶组件41逐渐被释放,弹性抵顶组件41有利于凸部31进入配合凹部31中,在凸部31完全转入至配合凹部31中以及凸部31转出配合凹部31之前,弹性抵顶组件41处于被释放的状态,在该过程中,凸部31能够在配合凹部31中顺畅转动,因此,在该过程中,中心连杆30m处于解锁状态,第一机臂10和第二机臂20能够顺利转动,直至凸部31完全转入至配合凹部31中到达锁定状态。
本实施例通过在弹性抵顶组件41上设置与凸部31配合的配合凹部411,从而能够进一步提高锁定效果,提高锁定后的稳固性。
进一步的,如图3和图4所示,凸部31沿平行于中心连杆30m的转动轴线方向向外凸出。
中心连杆31上的凸部31可以包括多个,凸部41所在端面上还形成有多个凹部32,多个凸部31和凹部32连续排列形成波浪状端面W1。每个相邻的凸部31和凹部32之间均弧面过渡。弹性抵顶组件41上形成有用于与波浪状端面配合的波浪状配合面W2。如图4所示状态下,波浪状端面W1与波浪状配合面W2配合,以在中心连杆30m逆时针转动过程中,弹性抵顶组件41逐渐压缩,阻碍中心连杆30m转动,可在一定程度上使第一机臂10和第二机臂20保持当前位置。当继续加大力度使中心连杆30m转过波浪状配合面W2的最高点后,弹性抵顶组件41逐渐恢复形变使得波浪状端面W1与波浪状配合面W2的接触面有利于旋转,当中心连杆30m旋转至波浪状配合面W2的最低的位置,将重复进入阻碍旋转的阶段,即进入锁定状态。
通过波浪状端面W1与波浪状配合面W2的配合,使得整个同步装置30能够在多个旋转角度下进入锁定状态,即,可以使得第一机臂10和第二机臂20能够在多个不同夹角状态下进而锁定状态。
如图3和图4所示,优选的,弹性抵顶组件41可以包括用于与凸部31配合的刚性施力件41a,以及设置于刚性施力件41a与安装座50之间的弹性元件41b。弹性元件41b可以为轴向弹性件,具体可为轴向伸缩弹簧,弹性元件41b可以一端与安装座50固定连接,另一端与刚性施力件41a固定连接。当然,还可以是,弹性元件41b可以一端与安装座50或刚性施力件41a固定连接,弹性元件41b的另一端与刚性施力件41a或安装座50抵接。
本实施例通过弹性元件41b提供弹性阻力,而通过刚性施力件41a提供
与具有凸部31的传动件的接触面,结构简单,且功能稳定。
当然,可以选择的是,弹性抵顶组件41还可以为弹片、橡胶等一系列能够提供弹性阻力的零部件。
更进一步的,中心连杆30m可以通过连杆转轴(与实施例二中的导向轴52相同)与安装座50可转动地连接,刚性施力件41a、弹性元件41b套设于连杆转轴上。具体的,连杆转轴的外径可以略大于刚性施力件41a和弹性元件41b的孔径,由此,既可以不影响刚性施力件41a沿连杆转轴轴向运动,也能对弹性元件41b进行限位,防止弹性元件41b摆动。
通过将刚性施力件41a和弹性元件41b套设在连杆转轴外侧,能够保证弹性抵顶组件41沿预定方向对中心连杆30m施加弹性阻力,能稳定保持中心连杆30m与刚性施力件41a之间的良好接触。
另外,请继续参照附图3和附图4,在连杆转轴上可以形成有用于阻碍刚性施力件41a周向转动的阻挡部521。当中心连杆30m在弹性抵顶组件41的抵顶下转动时,由于作用力与反作用力的相互作用,中心连杆30m可能会带动刚性施力件41a转动,尤其在弹性元件41b仅一端与安装座50或刚性施力件41a连接的情况下,若刚性施力件41a也跟着中心连杆30m旋转,则无法达到阻碍中心连杆30m转动的目的。通过阻挡部521阻碍刚性施力件41a的转动,使得刚性施力件41a仅能够沿连杆转轴轴向运动,使得锁定装置40的锁定效果更佳可靠。
而本实施例中,阻挡部521的具体结构形式可以有很多种,下面列举几种形式:
具体的,阻挡部521可以为设于连杆转轴的外侧壁上的、沿轴向方向延伸的滑轨(图中未示出),对应的,刚性施力件41a的内侧壁上设有与滑轨配合的滑槽(图中未示出)。
当然,也可以反过来,即,阻挡部521为设于导向轴外侧壁上的、沿轴向方向延伸的滑槽(图中未示出),对应的,刚性施力件41a的内侧壁上设有与滑槽配合的滑轨(图中未示出)。
或者,例如,如图3和图4所示,连杆转轴的横截面为非圆形,刚性施力件41a的内侧壁形状与连杆转轴的横截面形状相匹配。例如,连杆转轴沿与轴向方向平行的方向切割形成纵截面,使得连杆转轴呈非圆形,而该被切
割后形成的纵截面形成阻挡部521。
阻挡部521的具体形式除了上述描述的之外,还有很多,本领域技术人员可以根据实际情况而具体设计,在此不一一赘述。
另外,作为另外一种可选的实施方式,凸部31还可以沿中心连杆30m的径向方向向外凸出。则对应的,锁定装置40也在中心连杆30m的径向方向是外侧壁上对中心连杆30m进行锁定。
实施例十一
本实施例在实施例六的基础上,提供另外一种锁定装置的锁定方式。具体的,图5为本发明实施例所提供的无人机的机架组件的另一种锁定原理图。如图5所示,锁定装置40与中心连杆30m中的其中一个套设于锁定装置40与中心连杆30m中的另一个的外侧,在锁定装置40与中心连杆30m中的其中一个的侧壁上具有通孔43,在锁定装置40与中心连杆30m中的其中一个上、且位于通孔43处形成有弹性锁扣44,弹性锁扣44上靠近通孔的一侧设有卡锁部441,在锁定装置40与中心连杆30m中的另一个的外侧壁上设有与卡锁部441配合的配合部31m。
在初始状态时,卡锁部441穿过通孔43卡入配合部31m中,以阻碍中心连杆30m转动。
弹性锁扣44在外力作用下沿远离通孔43的方向运动,以使卡锁部441脱离配合部31m,中心连杆30m能够转动。具体的,如图5所示,操作者可以朝远离通孔43的方向掰动弹性锁扣44。
具体的,如图5所示,弹性锁扣44可以包括连接端442和自由端443,连接端442用于与锁定装置40与中心连杆30m中的其中一个的侧壁连接,自由端443远离连接端442。
在连接端442与卡锁部441之间的至少一段为弹性段。由此,至少可以实现弹性锁扣44能够在外力作用下被掰动,且能在外力消失后自动回复。
作为另外一种可选的方式,弹性锁扣44可以包括刚性本体,以及设置在刚性本体与锁定装置40与中心连杆30m中的其中一个的侧壁之间的扭簧(图中未示出),卡锁部441位于刚性本体上。
或者作为另外一种可选的方式,弹性锁扣44为弹簧钢片。
需要说明的是,图5所示仅为锁定装置40套设在中心连杆30m外侧的
方案,实际上还可以反过来,中心连杆30m可以套设在锁定装置40外侧。
本实施例通过弹性锁扣44直接将中心连杆30m卡持住,同样也可以实现将第一机臂10和第二机臂20锁定的功能。
实施例十二
图6为本发明实施例所提供的无人机的结构示意图。请参照附图1-附图5,以及附图6,本实施例提供一种无人机,包括机架组件以及设于机架组件上的动力装置,动力装置用于提供飞行动力给无人机。
其中,机架组件,包括:中心架100,与中心架100可转动连接的第一机臂10、第二机臂20,以及用于将第一机臂10与第二机臂20同步锁定的锁定机构,锁定机构包括:同步装置30、锁定装置40和安装座50。第一机臂10和第二机臂20可以分别通过机臂转轴固定在中心架上。
其中,第一机臂10和第二机臂20能够相对于安装座50转动,安装座50相对于中心架保持不动。
具体的,第一机臂10和第二机臂20相对于安装座50转动,安装座50相对于中心架保持不动。具体至少包括两种实施方式:
安装座50可以通过转轴与第一机臂10和第二机臂20可转动连接,更具体的,安装座50的转轴可以与第一机臂10和第二机臂20与中心架的转轴同轴,如此一来,当第一机臂10和第二机臂20相对于中心架转动时,安装座50可以不转动。
具体的,例如,安装座50可以包括相对设置的上壳体(图中未示出)、下壳体51、第一机臂10和第二机臂20可以位于上壳体和下壳体51之间。上壳体的一端与下壳体51的一端,以及第一机臂10、中心架可以通过第一机臂转轴a可转动地连接。上壳体的另一端与下壳体51的另一端,以及第二机臂20、中心架可以通过第二机臂转轴b可转动地连接。
或者,安装座50可以直接固定在中心架上,例如焊接在中心架上,或者与中心架通过连接件固定连接,或者与中心架一体成型,第一机臂10和第二机臂20相对于中心架转动时,安装座50可以不转动。
上述两种方式均可以实现,当第一机臂10和第二机臂20被锁定在安装座50上时,第一机臂10和第二机臂20也无法相对于中心架转动。
同步装置30设于第一机臂10与第二机臂20之间,同步装置30包括多
个可相对转动的传动件,多个传动件转动以使第一机臂10与第二机臂20同步转动。在本实施例中,多个可相对转动的传动件可以为多个相互啮合的齿轮,多个相互铰接的连杆,或者其他可以传递动力以使得第一机臂10和第二机臂20可以同步转动的传动件,在此本实施例不特别限定,具体可根据实际情况选用。
锁定装置40用于锁定多个传动件中的至少一个,同步装置30中的至少一个传动件上设有凸部31,锁定装置40包括设置于安装座50上的、用于凸部31配合的弹性抵顶组件41。其中,传动件上的凸部31可以包括一个,或多个。其中,弹性抵顶组件41可以可拆卸或不可拆卸的方式固定在安装座50上,例如螺接、卡接、焊接、铆接等。
可以理解的是,锁定装置40用于锁定多个传动件中的至少一个,是指,多个传动件中的至少一个可以被锁定装置40锁定,而不应理解为多个传动件中的任意一个均可为锁定装置40锁定。
弹性抵顶组件41抵顶同步装置30中的至少一个传动件上的凸部31,以阻碍该具有凸部31的传动件转动;当在外力作用下该具有凸部的传动件克服弹性抵顶组件41所施加的弹性阻力,该具有凸部31的传动件能够继续转动。当该具有凸部31的传动件能够继续转动时,从而同步装置30内的动力传递可以得以继续,第一机臂10和第二机臂20能够通过同步装置30同步传动。
可以理解的是,在设计时,可以设计当凸部31转动到某一角度时,能够被弹性抵顶组件41抵顶,在这个角度下,第一机臂10和第二机臂20可以处于展开状态,第一机臂10和第二机臂20在展开状态下被锁定,而当克服弹性抵顶组件41的阻力之后,第一机臂10和第二机臂20可以自由转动,例如可以自由转动至折叠状态。
其中,第一机臂10与第二机臂20可以相对转动至最小预设夹角,例如第一机臂10与第二机臂20转动至相互平行,即夹角为零。在第一机臂10与第二机臂20相对转动至最小预设夹角时,第一机臂10、第二机臂20处于折叠状态。此处的折叠状态是第一机臂10和第二机臂20相对呈折叠状态,而不应理解为第一机臂10和第二机臂20分别各自呈折叠状态。
第一机臂10与第二机臂20可以相对转动至最大预设夹角,例如第一机
臂10与第二机臂20转动夹角呈180度。在第一机臂10与第二机臂20相对转动至最大预设夹角时,第一机臂10、第二机臂20处于展开状态。此处的展开状态是第一机臂10和第二机臂20相背离呈展开状态,而不应理解为第一机臂10和第二机臂20分别各自呈展开状态。
当然,可以理解的是,在第一机臂10和第二机臂20处于折叠状态时,第一机臂10与第二机臂20之间的夹角还可以大于零,在第一机臂10和第二机臂20处于展开状态时,第一机臂10与第二机臂20之间的夹角还可以小于180度。具体可根据机臂数量和布置位置,以及预设的展开形式而确定,在此,本实施例不做限定。
另外,在本实施例中,锁定装置40可以包括两个,且两个锁定装置40可以分别设置在具有凸部31的传动件的两侧,由此可以进一步提高锁定效果。
本发明实施例提供的无人机,通过设置同步装置,锁定装置和安装座,第一机臂和第二机臂相对于安装座转动,安装座相对于中心架不动,同步装置通过其多个可相对转动的传动件使第一机臂与第二机臂同步转动,同步装置中的至少一个传动件上设有凸部,锁定装置包括与凸部配合的弹性抵顶组件,当凸部转动到弹性抵顶组件被弹性抵顶组件抵顶时,在弹性抵顶组件的弹性阻力的作用下,该传动件无法转动,进而整个同步装置无法转动,第一机臂和第二机臂被锁定,而当外力克服弹性抵顶组件施加的弹性阻力时,则具有凸部的传动件能够继续转动,进而整个同步装置能够继续转动,第一机臂和第二机臂能够转动。由此实现了一次锁定两个机臂,提高了操作效率。
实施例十三
本实施例基于实施例十二,进一步的,如图3和图4所示,弹性抵顶组件41可以包括与凸部31配合的配合凹部411。当凸部31位于配合凹部411内时,锁定装置40将该具有凸部31的传动件维持在锁定状态。配合凹部411的形状可以完全与凸部31相匹配,或者可以略大于凸部31,当凸部31转动至卡入配合凹部411时,凸部31能够在配合凹部411的壁面限制下,更好地维持锁定状态,提高锁定的稳固性。
在该具有凸部31的传动件转动至凸部31逐渐脱离配合凹部411的过程
中,弹性抵顶组件41逐渐被压缩,该具有凸部31的传动件从锁定状态切换至解锁状态。当该具有凸部31的传动件朝向脱离配合凹部411的方向转动的过程中,由于配合凹部411是设置在弹性抵顶组件41上,凸部31挤压弹性抵顶组件41使得弹性抵顶组件41被压缩,弹性回复力越来越大,也就是说弹性抵顶组件41阻碍凸部31脱离配合凹部411,凸部31需要被更大的外力作用下才能脱离配合凹部411,当外力足够大时,凸部31从配合凹部411中脱离,当具有凸部31的传动件继续在较大的外力作用下转动,该具有凸部31的传动件所受的弹性抵顶组件41所施加的弹性阻力越来越小,该具有凸部31的传动件可转动,第一机臂10和第二机臂20进而也能转动。
在该具有凸部31的传动件转动至凸部31逐渐进入配合凹部31的过程中,弹性抵顶组件41逐渐被释放,该具有凸部31的传动件逐渐从解锁状态切换至锁定状态。在具有凸部31的传动件在转入至配合凹部31的过程中,弹性抵顶组件41逐渐被释放,弹性抵顶组件41有利于凸部31进入配合凹部31中,在凸部31完全转入至配合凹部31中以及凸部31转出配合凹部31之前,弹性抵顶组件41处于被释放的状态,在该过程中,凸部31能够在配合凹部31中顺畅转动,因此,在该过程中,该具有凸部31的传动件处于解锁状态,第一机臂10和第二机臂20能够顺利转动,直至凸部31完全转入至配合凹部31中到达锁定状态。
本实施例通过在弹性抵顶组件41上设置与凸部31配合的配合凹部411,从而能够进一步提高锁定效果,提高锁定后的稳固性。
进一步的,如图3和图4所示,本实施例中的凸部31可以沿平行于自身所在的传动件的转动轴线方向向外凸出。
一个传动件上的凸部31可以包括多个,凸部41所在端面上还形成有多个凹部32,多个凸部31和凹部32连续排列形成波浪状端面W1。每个相邻的凸部31和凹部32之间均弧面过渡。弹性抵顶组件41上形成有用于与波浪状端面配合的波浪状配合面W2。如图4所示状态下,波浪状端面W1与波浪状配合面W2配合,以在具有凸部31的传动件逆时针转动过程中,弹性抵顶组件41逐渐压缩,阻碍该具有凸部31的传动件转动,可在一定程度上使第一机臂10和第二机臂20保持当前位置。当继续加大力度使具有凸部31的传动件转过波浪状配合面W2的最高点后,弹性抵顶组件41逐渐恢复形变使得
波浪状端面W1与波浪状配合面W2的接触面有利于旋转,当具有凸部31的传动件旋转至波浪状配合面W2的最低的位置,将重复进入阻碍旋转的阶段,即进入锁定状态。
通过波浪状端面W1与波浪状配合面W2的配合,使得整个同步装置30能够在多个旋转角度下进入锁定状态,即,可以使得第一机臂10和第二机臂20能够在多个不同夹角状态下进而锁定状态。
如图3和图4所示,优选的,弹性抵顶组件41可以包括用于与凸部31配合的刚性施力件41a,以及设置于刚性施力件41a与安装座50之间的弹性元件41b。弹性元件41b可以为轴向弹性件,具体可为轴向伸缩弹簧,弹性元件41b可以一端与安装座50固定连接,另一端与刚性施力件41a固定连接。当然,还可以是,弹性元件41b可以一端与安装座50或刚性施力件41a固定连接,弹性元件41b的另一端与刚性施力件41a或安装座50抵接。
本实施例通过弹性元件41b提供弹性阻力,而通过刚性施力件41a提供与具有凸部31的传动件的接触面,结构简单,且功能稳定。
当然,可以选择的是,弹性抵顶组件41还可以为弹片、橡胶等一系列能够提供弹性阻力的零部件。
更进一步的,在安装座50上还可以固定有导向轴52,刚性施力件41a和弹性元件41b可以套设在导向轴52的外侧。具体的,导向轴52的外径可以略大于刚性施力件41a和弹性元件41b的孔径,由此,既可以不影响刚性施力件41a沿导向轴52轴向运动,也能对弹性元件41b进行限位,防止弹性元件41b摆动。
通过导向轴52的设置,能够保证弹性抵顶组件41沿预定方向对同步装置30中具有凸部31的传动件施加弹性阻力,能稳定保持具有凸部31的传动件与刚性施力件41a之间的良好接触。
另外,请继续参照附图3和附图4,在导向轴52上可以形成有用于阻碍刚性施力件41a周向转动的阻挡部521。当具有凸部31的传动件在弹性抵顶组件41的抵顶下转动时,由于作用力与反作用力的相互作用,具有凸部31的传动件可能会带动刚性施力件41a转动,尤其在弹性元件41b仅一端与安装座50或刚性施力件41a连接的情况下,若刚性施力件41a也跟着具有凸部31的传动件旋转,则无法达到阻碍具有凸部31的传动件转的目的。通过阻
挡部521阻碍刚性施力件41a的转动,使得刚性施力件41a仅能够沿导向轴52轴向运动,使得锁定装置40的锁定效果更佳可靠。
而本实施例中,阻挡部521的具体结构形式可以有很多种,下面列举几种形式:
具体的,阻挡部521可以为设于导向轴52的外侧壁上的、沿轴向方向延伸的滑轨(图中未示出),对应的,刚性施力件41a的内侧壁上设有与滑轨配合的滑槽(图中未示出)。
当然,也可以反过来,即,阻挡部521为设于导向轴外侧壁上的、沿轴向方向延伸的滑槽(图中未示出),对应的,刚性施力件41a的内侧壁上设有与滑槽配合的滑轨(图中未示出)。
或者,例如,如图3和图4所示,导向轴52的横截面为非圆形,刚性施力件41a的内侧壁形状与导向轴52的横截面形状相匹配。例如,导向轴52沿与轴向方向平行的方向切割形成纵截面,使得导向轴52呈非圆形,而该被切割后形成的纵截面形成阻挡部521。
阻挡部521的具体形式除了上述描述的之外,还有很多,本领域技术人员可以根据实际情况而具体设计,在此不一一赘述。
实施例十四
本实施例在实施例十二或实施例十三的基础上,对同步装置30进行进一步限定,同步装置30可以包括连杆传动组件。
在本实施例中,优选的,连杆传动组件中的其中至少一个连杆的转轴固定于安装座50上。
如图2和图3所示,连杆传动组件可以包括中心连杆30m、第一过渡连杆30a、第一机臂连杆30b、第二过渡连杆30c、第二机臂连杆30d;在安装座50可以上形成有第一直线滑道53和第二直线滑道54;中心连杆30m可以通过转轴可转动地连接在安装座50上。
第一过渡连杆30a的首端与中心连杆30m的一端铰接,第一过渡连杆30a的末端与第一机臂连杆30b的首端铰接;第一机臂连杆30b的末端与第一机臂铰接,第一过渡连杆30a与第一机臂连杆30b的铰接处滑设于第一直线滑道内53。
第二过渡连杆30c的首端与中心连杆30m的另一端铰接,第二过渡连杆
30c的末端与第二机臂连杆30d的首端铰接,第二机臂连杆30d的末端与第二机臂20铰接,第二过渡连杆与第二机臂连杆30d的铰接处滑设于第二直线滑道54内。
通过上述连杆形式,第一机臂10、第一机臂连杆30b、第一过渡连杆30a、中心连杆30m、第二过渡连杆30c、第二机臂连杆30d、第二机臂20,共同构成七连杆结构。
在本实施例中,需要说明的是,第一机臂连杆30b与第一机臂10的铰接轴与第一机臂连杆30b相对于中心架转动的第一机臂转轴a不同轴,第二机臂连杆30d与第二机臂20的铰接轴与第二机臂连杆30d相对于中心架转动的第二机臂转轴b不同轴。
本实施例所提供的无人机的机架组件的通过连杆形式的同步装置带动第一机臂10和第二机臂20同步转动的大致工作原理如下:
首先,以转动中心连杆30m为例,例如在图2所示,当沿顺时针方向转动中心连杆30m,中心连杆30m推动第一过渡连杆30a转动,第一过渡连杆30a的末端在第一直线滑道53内向左滑动,带动第一机臂连杆30b逆时针转动,第一机臂10顺时针转动;同时,中心连杆30m推动第二过渡连杆30c转动,第二过渡连杆30c的末端在第二直线滑道54内向右滑动,带动第二机臂连杆30d顺时针转动,第二机臂20逆时针转动,即实现了第一机臂10和第二机臂30同时朝向夹角相对减小的方向转动,至折叠状态。
当在第一机臂10和第二机臂30处于折叠状态后,沿逆时针方向转动中心连杆30m,中心连杆30m推动第一过渡连杆30a转动,第一过渡连杆30a的末端在第一直线滑道53内向右滑动,带动第一机臂连杆30b顺时针转动,第一机臂10逆时针转动;同时,中心连杆30m推动第二过渡连杆30c转动,第二过渡连杆30c的末端在第二直线滑道54内向左滑动,带动第二机臂连杆30d逆时针转动,第二机臂20顺时针转动,即实现了第一机臂10和第二机臂30同时朝向夹角相对增大的方向转动。
同理,当转动第一机臂10或第二机臂20时,可以通过上述的传动方式将动力从第一机臂10传递到第二机臂20,或者从第二机臂20传递到第一机臂10。其具体传递过程,在此不再赘述。
具体的,在本实施例中,第一直线滑道53可以包括直线凹槽和/或直线
通孔;及/或,第二直线滑道54包括直线凹槽和/或直线通孔。
在本实施例中,中心连杆30m上形成有凸部31。锁定装置40锁定中心连杆30m上的凸部31以阻碍中心连杆30m转动,以阻断同步装置30的动力传递,实现第一机臂10与第二机臂20的锁定。
实施例十五
本实施例在实施例十二或实施例十三的基础上,对同步装置30进行进一步限定,提供一种与实施例十四不同的实施方式,具体的,连杆传动组件包括中心连杆30m、第一机臂连杆、第二机臂连杆;中心连杆30m通过转轴可转动地连接在安装座50上。第一机臂连杆的首端与中心连杆30m的一端铰接,第一机臂连杆的末端与第一机臂10铰接。第二机臂连杆的首端与中心连杆30m的另一端铰接,第二机臂连杆的末端与第二机臂20铰接。
即,在实施例十四中,省去第一过滤连杆30a、第二过渡连杆30c以及第一直线滑道53和第二直线滑道54,同样也可以实现将第一机臂10和第二机臂20的同步转动,该种实施例的方式其零部件少,结构简单。
实施例十六
本实施例在实施例十二或实施例十三的基础上,对同步装置30进行进一步限定,提供一种与实施例十四和实施例十五不同的实施方式。
同步装置30可以包括啮合齿轮对,啮合齿轮对包括与第一机臂10固定连接的第一齿轮,以及与第二机臂20固定连接的第二齿轮,第一齿轮与第二齿轮啮合传动。
本实施例是通过齿轮啮合的形式实现第一机臂10和第二机臂20之间的同步转动,例如,当第一机臂10逆时针转动时,带动第一齿轮逆时针转动,第一齿轮带动第二齿轮顺时针转动,第二齿轮带动第二机臂顺时针转动。
当锁定装置40锁定住任意一个齿轮使其不能转动时,第一机臂10和第二机臂20均不可转动,从而实现锁定。
通过齿轮啮合对的方式同样可以实现第一机臂10和第二机臂的同步转动。
实施例十七
请参照附图1-附图5,以及附图6,本实施例提供另外一种无人机,包括机架组件以及设于机架组件上的动力装置,动力装置用于提供飞行动力给无
人机。
其中机架组件包括:中心架100,与中心架100可转动连接的第一机臂10、第二机臂20,及用于将第一机臂10与第二机臂20同步锁定的锁定机构,锁定机构包括:同步装置30、锁定装置40和安装座50。第一机臂10和第二机臂20可以分别通过机臂转轴固定在中心架100上。
第一机臂10和第二机臂20相对于安装座50转动,安装座50相对于中心架保持不动。
具体的,第一机臂10和第二机臂20相对于安装座50转动,安装座50相对于中心架保持不动。具体至少包括两种实施方式:
安装座50可以通过转轴与第一机臂10和第二机臂20可转动连接,更具体的,安装座50的转轴可以与第一机臂10和第二机臂20与中心架的转轴同轴,如此一来,当第一机臂10和第二机臂20相对于中心架转动时,安装座50可以不转动。
具体的,例如,安装座50可以包括相对设置的上壳体(图中未示出)、下壳体51、第一机臂10和第二机臂20可以位于上壳体和下壳体51之间。上壳体的一端与下壳体51的一端,以及第一机臂10、中心架可以通过第一机臂转轴a可转动地连接。上壳体的另一端与下壳体51的另一端,以及第二机臂20、中心架可以通过第二机臂转轴b可转动地连接。
或者,安装座50可以直接固定在中心架上,例如焊接在中心架上,或者与中心架通过连接件固定连接,或者与中心架一体成型,第一机臂10和第二机臂20相对于中心架转动时,安装座50可以不转动。
上述两种方式均可以实现,当第一机臂10和第二机臂20被锁定在安装座50上时,第一机臂10和第二机臂20也无法相对于中心架转动。
同步装置30包括中心连杆30m、第一机臂连杆组、第二机臂连杆组,中心连杆30m可转动地连接在安装座50上;中心连杆30m的一端与第一机臂连杆组的首端铰接,第一机臂连杆组的末端与第一机臂10铰接;中心连杆30m的另一端与第二机臂连杆组的首端铰接,第二机臂连杆组的末端与第二机臂20铰接;中心连杆30m、第一机臂连杆组、第二机臂连杆组用于传递动力以驱动第一机臂10和第二机臂20同步转动。
锁定装置40设于安装座50与中心连杆30m之间,锁定装置40包括锁
定状态和解锁状态,在锁定状态下,锁定装置40提供阻力以阻碍中心连杆30m转动,直至中心连杆30m在外力作用下克服阻力,锁定装置40切换为解锁状态,中心连杆能够相对于安装座50转动。在本实施例中,锁定装置40的锁定方式可以有多种,例如,卡持在中心连杆30m上,使中心连杆30m无法转动,或者,通过摩擦阻力或弹性阻力的方式阻碍中心连杆30m转动,其实现方式有多种,在此,本实施例不做限定。
可以理解的是,在设计时,可以设计当中心连杆30m转动到某一角度时,能够被锁定装置锁定,在这个角度下,第一机臂10和第二机臂20可以处于展开状态,第一机臂10和第二机臂20在展开状态下被锁定,而当去除同步装置的锁定之后,第一机臂10和第二机臂20可以自由转动,例如可以自由转动至折叠状态。
其中,第一机臂10与第二机臂20可以相对转动至最小预设夹角,例如第一机臂10与第二机臂20转动至相互平行,即夹角为零。在第一机臂10与第二机臂20相对转动至最小预设夹角时,第一机臂10、第二机臂20处于折叠状态。此处的折叠状态是第一机臂10和第二机臂20相对呈折叠状态,而不应理解为第一机臂10和第二机臂20分别各自呈折叠状态。
第一机臂10与第二机臂20可以相对转动至最大预设夹角,例如第一机臂10与第二机臂20转动夹角呈180度。在第一机臂10与第二机臂20相对转动至最大预设夹角时,第一机臂10、第二机臂20处于展开状态。此处的展开状态是第一机臂10和第二机臂20相背离呈展开状态,而不应理解为第一机臂10和第二机臂20分别各自呈展开状态。
当然,可以理解的是,在第一机臂10和第二机臂20处于折叠状态时,第一机臂10与第二机臂20之间的夹角还可以大于零,在第一机臂10和第二机臂20处于展开状态时,第一机臂10与第二机臂20之间的夹角还可以小于180度。具体可根据机臂数量和布置位置,以及预设的展开形式而确定,在此,本实施例不做限定。
本实施例提供的无人机,通过设置同步装置,锁定装置和安装座,第一机臂和第二机臂相对于安装座转动,同步装置包括中心连杆、第一机臂连杆组和第二机臂连杆组,中心连杆可转动地连接在安装座上,第一机臂、第一机臂连杆组、中心连杆、第二机臂连杆组和第二机臂顺次铰接形成连
杆传动的形式,锁定装置设在安装座和中心连杆之间,通过提供阻力阻碍中心连杆转动,第一机臂和第二机臂处于锁定状态,直至中心连杆克服阻力继续转动,第一机臂和第二机臂处于解锁状态。进而,由此实现了一次锁定两个机臂,提高了操作效率。
实施例十八
本实施例在实施例十七的基础上,对第一机臂连杆组和第二机臂连杆组进行进一步限定,第一机臂连杆组包括:第一过渡连杆30a,第一机臂连杆30b,以及形成于安装座50上的第一直线滑道53;第一过渡连杆30a的首端与中心连杆30m的一端铰接,第一过渡连杆30a的末端与第一机臂连杆30b的首端铰接;第一机臂连杆30b的末端与第一机臂铰接,第一过渡连杆30a与第一机臂连杆30b的铰接处滑设于第一直线滑道内53。
第二机臂连杆组包括:第二过渡连杆30c,第二机臂连杆30d,以及形成于安装座50上的第二直线滑道54;第二过渡连杆30c的首端与中心连杆30m的另一端铰接,第二过渡连杆30c的末端与第二机臂连杆30d的首端铰接,第二机臂连杆30d的末端与第二机臂20铰接,第二过渡连杆与第二机臂连杆30d的铰接处滑设于第二直线滑道54内。
通过上述连杆形式,第一机臂10、第一机臂连杆30b、第一过渡连杆30a、中心连杆30m、第二过渡连杆30c、第二机臂连杆30d、第二机臂20,共同构成七连杆结构。
在本实施例中,需要说明的是,第一机臂连杆30b与第一机臂10的铰接轴与第一机臂连杆30b相对于中心架转动的第一机臂转轴a不同轴,第二机臂连杆30d与第二机臂20的铰接轴与第二机臂连杆30d相对于中心架转动的第二机臂转轴b不同轴。
本实施例所提供的无人机的机架组件的同步装置带动第一机臂10和第二机臂20同步转动的大致工作原理如下:
首先,以转动中心连杆30m为例,例如在图2所示,当沿顺时针方向转动中心连杆30m,中心连杆30m推动第一过渡连杆30a转动,第一过渡连杆30a的末端在第一直线滑道53内向左滑动,带动第一机臂连杆30b逆时针转动,第一机臂10顺时针转动;同时,中心连杆30m推动第二过渡连杆30c转动,第二过渡连杆30c的末端在第二直线滑道54内向右滑动,带动第二机
臂连杆30d顺时针转动,第二机臂20逆时针转动,即实现了第一机臂10和第二机臂30同时朝向夹角相对减小的方向转动,至折叠状态。
当在第一机臂10和第二机臂30处于折叠状态后,沿逆时针方向转动中心连杆30m,中心连杆30m推动第一过渡连杆30a转动,第一过渡连杆30a的末端在第一直线滑道53内向右滑动,带动第一机臂连杆30b顺时针转动,第一机臂10逆时针转动;同时,中心连杆30m推动第二过渡连杆30c转动,第二过渡连杆30c的末端在第二直线滑道54内向左滑动,带动第二机臂连杆30d逆时针转动,第二机臂20顺时针转动,即实现了第一机臂10和第二机臂30同时朝向夹角相对增大的方向转动。
同理,当转动第一机臂10或第二机臂20时,可以通过上述的传动方式将动力从第一机臂10传递到第二机臂20,或者从第二机臂20传递到第一机臂10。其具体传递过程,在此不再赘述。
具体的,在本实施例中,第一直线滑道53可以包括直线凹槽和/或直线通孔;及/或,第二直线滑道54包括直线凹槽和/或直线通孔。
进一步的,在第一过渡连杆30a与第一机臂连杆30b的铰接处设有第一滑块P1,第一滑块P1与第一直线滑道53配合;及/或,第二过渡连杆30a与第二机臂连杆30d的铰接处设有第二滑块P2,第二滑块P2与第二直线滑道54配合。
实施例十九
本实施例在实施例十七的基础上,提供一种区别于实施例十八的同步装置30的实施例,具体的,第一机臂连杆组至多包括第一机臂连杆;第二机臂连杆组至多包括第二机臂连杆;中心连杆30m通过转轴可转动地连接在安装座50上;
第一机臂连杆的首端与中心连杆30m的一端铰接,第一机臂连杆的末端与第一机臂10铰接。第二机臂连杆的首端与中心连杆30m的另一端铰接,第二机臂连杆的末端与第二机臂20铰接。
即,在实施例十八中,省去第一过滤连杆30a、第二过渡连杆30c以及第一直线滑道53和第二直线滑道54,同样也可以实现将第一机臂10和第二机臂20的同步转动,该种实施例的方式其零部件少,结构简单。
实施例二十
本实施例在实施例十七或实施例十八或实施例十九的基础上,对锁定装置40的锁定方式进行进一步限定,具体的,中心连杆30m可以包括凸部31;锁定装置40包括设置于安装座50上的、用于凸部31配合的弹性抵顶组件41;弹性抵顶组件41抵顶中心连杆30m上的凸部31,以阻碍中心连杆30m转动;当在外力作用下中心连杆30m克服弹性抵顶组件41所施加的弹性阻力,中心连杆30m能够继续转动。当该中心连杆30m能够继续转动时,从而同步装置30内的动力传递可以得以继续,第一机臂10和第二机臂20能够通过同步装置30同步传动。
其中,弹性抵顶组件41可以可拆卸或不可拆卸的方式固定在安装座50上,例如螺接、卡接、焊接、铆接等。
本实施例的锁定装置40利用弹性阻力对中心连杆30m进行锁定,结构简单,操作方便。
另外,需要说明的是,在本实施例中,锁定装置40可以包括两个,且两个锁定装置40可以分别设置在中心连杆30m的两侧,由此可以进一步提高锁定效果。
实施例二十一
本实施例在实施例二十的基础上,如图3和图4所示,进一步的,弹性抵顶组件41可以包括与凸部31配合的配合凹部411。当凸部31位于配合凹部411内时,锁定装置40将中心连杆30m维持在锁定状态。配合凹部411的形状可以完全与凸部31相匹配,或者可以略大于凸部31,当凸部31转动至卡入配合凹部411时,凸部31能够在配合凹部411的壁面限制下,更好地维持锁定状态,提高锁定的稳固性。
在中心连杆30m转动至凸部31逐渐脱离配合凹部411的过程中,弹性抵顶组件41逐渐被压缩,中心连杆30m从锁定状态切换至解锁状态。当中心连杆30m的转动使凸部31朝向脱离配合凹部411的方向转动的过程中,由于配合凹部411是设置在弹性抵顶组件41上,凸部31挤压弹性抵顶组件41使得弹性抵顶组件41被压缩,弹性回复力越来越大,也就是说弹性抵顶组件41阻碍凸部31脱离配合凹部411,凸部31需要被更大的外力作用下才能脱离配合凹部411,当外力足够大时,凸部31从配合凹部411中脱离,当中心连杆30m继续在较大的外力作用下转动,中心连杆30m所受的弹性抵顶
组件41所施加的弹性阻力越来越小,中心连杆30m可转动,第一机臂10和第二机臂20进而也能转动。
在中心连杆30m转动至凸部31逐渐进入配合凹部31的过程中,弹性抵顶组件41逐渐被释放,中心连杆30m逐渐从解锁状态切换至锁定状态。在中心连杆30m在转入至配合凹部31的过程中,弹性抵顶组件41逐渐被释放,弹性抵顶组件41有利于凸部31进入配合凹部31中,在凸部31完全转入至配合凹部31中以及凸部31转出配合凹部31之前,弹性抵顶组件41处于被释放的状态,在该过程中,凸部31能够在配合凹部31中顺畅转动,因此,在该过程中,中心连杆30m处于解锁状态,第一机臂10和第二机臂20能够顺利转动,直至凸部31完全转入至配合凹部31中到达锁定状态。
本实施例通过在弹性抵顶组件41上设置与凸部31配合的配合凹部411,从而能够进一步提高锁定效果,提高锁定后的稳固性。
进一步的,如图3和图4所示,凸部31沿平行于中心连杆30m的转动轴线方向向外凸出。
中心连杆31上的凸部31可以包括多个,凸部41所在端面上还形成有多个凹部32,多个凸部31和凹部32连续排列形成波浪状端面W1。每个相邻的凸部31和凹部32之间均弧面过渡。弹性抵顶组件41上形成有用于与波浪状端面配合的波浪状配合面W2。如图4所示状态下,波浪状端面W1与波浪状配合面W2配合,以在中心连杆30m逆时针转动过程中,弹性抵顶组件41逐渐压缩,阻碍中心连杆30m转动,可在一定程度上使第一机臂10和第二机臂20保持当前位置。当继续加大力度使中心连杆30m转过波浪状配合面W2的最高点后,弹性抵顶组件41逐渐恢复形变使得波浪状端面W1与波浪状配合面W2的接触面有利于旋转,当中心连杆30m旋转至波浪状配合面W2的最低的位置,将重复进入阻碍旋转的阶段,即进入锁定状态。
通过波浪状端面W1与波浪状配合面W2的配合,使得整个同步装置30能够在多个旋转角度下进入锁定状态,即,可以使得第一机臂10和第二机臂20能够在多个不同夹角状态下进而锁定状态。
如图3和图4所示,优选的,弹性抵顶组件41可以包括用于与凸部31配合的刚性施力件41a,以及设置于刚性施力件41a与安装座50之间的弹性元件41b。弹性元件41b可以为轴向弹性件,具体可为轴向伸缩弹簧,弹性
元件41b可以一端与安装座50固定连接,另一端与刚性施力件41a固定连接。当然,还可以是,弹性元件41b可以一端与安装座50或刚性施力件41a固定连接,弹性元件41b的另一端与刚性施力件41a或安装座50抵接。
本实施例通过弹性元件41b提供弹性阻力,而通过刚性施力件41a提供与具有凸部31的传动件的接触面,结构简单,且功能稳定。
当然,可以选择的是,弹性抵顶组件41还可以为弹片、橡胶等一系列能够提供弹性阻力的零部件。
更进一步的,中心连杆30m可以通过连杆转轴(与实施例二中的导向轴52相同)与安装座50可转动地连接,刚性施力件41a、弹性元件41b套设于连杆转轴上。具体的,连杆转轴的外径可以略大于刚性施力件41a和弹性元件41b的孔径,由此,既可以不影响刚性施力件41a沿连杆转轴轴向运动,也能对弹性元件41b进行限位,防止弹性元件41b摆动。
通过将刚性施力件41a和弹性元件41b套设在连杆转轴外侧,能够保证弹性抵顶组件41沿预定方向对中心连杆30m施加弹性阻力,能稳定保持中心连杆30m与刚性施力件41a之间的良好接触。
另外,请继续参照附图3和附图4,在连杆转轴上可以形成有用于阻碍刚性施力件41a周向转动的阻挡部521。当中心连杆30m在弹性抵顶组件41的抵顶下转动时,由于作用力与反作用力的相互作用,中心连杆30m可能会带动刚性施力件41a转动,尤其在弹性元件41b仅一端与安装座50或刚性施力件41a连接的情况下,若刚性施力件41a也跟着中心连杆30m旋转,则无法达到阻碍中心连杆30m转动的目的。通过阻挡部521阻碍刚性施力件41a的转动,使得刚性施力件41a仅能够沿连杆转轴轴向运动,使得锁定装置40的锁定效果更佳可靠。
而本实施例中,阻挡部521的具体结构形式可以有很多种,下面列举几种形式:
具体的,阻挡部521可以为设于连杆转轴的外侧壁上的、沿轴向方向延伸的滑轨(图中未示出),对应的,刚性施力件41a的内侧壁上设有与滑轨配合的滑槽(图中未示出)。
当然,也可以反过来,即,阻挡部521为设于导向轴外侧壁上的、沿轴向方向延伸的滑槽(图中未示出),对应的,刚性施力件41a的内侧壁上设
有与滑槽配合的滑轨(图中未示出)。
或者,例如,如图3和图4所示,连杆转轴的横截面为非圆形,刚性施力件41a的内侧壁形状与连杆转轴的横截面形状相匹配。例如,连杆转轴沿与轴向方向平行的方向切割形成纵截面,使得连杆转轴呈非圆形,而该被切割后形成的纵截面形成阻挡部521。
阻挡部521的具体形式除了上述描述的之外,还有很多,本领域技术人员可以根据实际情况而具体设计,在此不一一赘述。
另外,作为另外一种可选的实施方式,凸部31还可以沿中心连杆30m的径向方向向外凸出。则对应的,锁定装置40也在中心连杆30m的径向方向是外侧壁上对中心连杆30m进行锁定。
实施例二十二
本实施例在实施例十七的基础上,提供另外一种锁定装置的锁定方式。具体的,图5为本发明实施例所提供的无人机的机架组件的另一种锁定原理图。如图5所示,锁定装置40与中心连杆30m中的其中一个套设于锁定装置40与中心连杆30m中的另一个的外侧,在锁定装置40与中心连杆30m中的其中一个的侧壁上具有通孔43,在锁定装置40与中心连杆30m中的其中一个上、且位于通孔43处形成有弹性锁扣44,弹性锁扣44上靠近通孔的一侧设有卡锁部441,在锁定装置40与中心连杆30m中的另一个的外侧壁上设有与卡锁部441配合的配合部31m。
在初始状态时,卡锁部441穿过通孔43卡入配合部31m中,以阻碍中心连杆30m转动。
弹性锁扣44在外力作用下沿远离通孔43的方向运动,以使卡锁部441脱离配合部31m,中心连杆30m能够转动。具体的,如图5所示,操作者可以朝远离通孔43的方向掰动弹性锁扣44。
具体的,如图5所示,弹性锁扣44可以包括连接端442和自由端443,连接端442用于与锁定装置40与中心连杆30m中的其中一个的侧壁连接,自由端443远离连接端442。
在连接端442与卡锁部441之间的至少一段为弹性段。由此,至少可以实现弹性锁扣44能够在外力作用下被掰动,且能在外力消失后自动回复。
作为另外一种可选的方式,弹性锁扣44可以包括刚性本体,以及设置在
刚性本体与锁定装置40与中心连杆30m中的其中一个的侧壁之间的扭簧(图中未示出),卡锁部441位于刚性本体上。
或者作为另外一种可选的方式,弹性锁扣44为弹簧钢片。
需要说明的是,图5所示仅为锁定装置40套设在中心连杆30m外侧的方案,实际上还可以反过来,中心连杆30m可以套设在锁定装置40外侧。
本实施例通过弹性锁扣44直接将中心连杆30m卡持住,同样也可以实现将第一机臂10和第二机臂20锁定的功能。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的相关描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
Claims (68)
- 一种无人机的机架组件,其特征在于,包括:中心架,与所述中心架可转动连接的第一机臂、第二机臂,以及用于将所述第一机臂与第二机臂同步锁定的锁定机构,所述锁定机构包括:同步装置、锁定装置和安装座;所述第一机臂和所述第二机臂能相对于安装座转动,安装座相对于中心架保持不动;所述同步装置设于所述第一机臂与所述第二机臂之间,所述同步装置包括多个可相对转动的传动件,多个传动件转动以使第一机臂与第二机臂同步转动;所述锁定装置用于锁定多个传动件中的至少一个,所述同步装置中的至少一个传动件上设有凸部,所述锁定装置包括设置于所述安装座上的、用于所述凸部配合的弹性抵顶组件;所述弹性抵顶组件抵顶所述同步装置中的至少一个传动件上的凸部,以阻碍该具有凸部的传动件转动;当在外力作用下该具有凸部的传动件克服所述弹性抵顶组件所施加的弹性阻力,该具有凸部的传动件能够继续转动。
- 根据权利要求1所述的无人机的机架组件,其特征在于,所述弹性抵顶组件包括与所述凸部配合的配合凹部;当所述凸部位于所述配合凹部内时,所述锁定装置将该具有凸部的传动件维持在锁定状态;在该具有凸部的传动件转动至凸部逐渐脱离配合凹部的过程中,所述弹性抵顶组件逐渐被压缩,该具有凸部的传动件从锁定状态切换至解锁状态;在该具有凸部的传动件转动至凸部逐渐进入配合凹部的过程中,所述弹性抵顶组件逐渐被释放,该具有凸部的传动件逐渐从解锁状态切换至锁定状态。
- 根据权利要求2所述的无人机的机架组件,其特征在于,所述凸部沿平行于自身所在的传动件的转动轴线方向向外凸出。
- 根据权利要求3所述的无人机的机架组件,其特征在于,一个传动件上的凸部包括多个,所述凸部所在端面上还形成有多个凹部,多个所述凸部和凹部连续排列形成波浪状端面;所述弹性抵顶组件上形成有用于与所述波浪状端面配合的波浪状配合 面。
- 根据权利要求1所述的无人机的机架组件,其特征在于,所述弹性抵顶组件包括用于与所述凸部配合的刚性施力件,以及设置于所述刚性施力件与安装座之间的弹性元件。
- 根据权利要求5所述的无人机的机架组件,其特征在于,所述安装座上固定有导向轴,所述刚性施力件和所述弹性元件套设在所述导向轴的外侧。
- 根据权利要求6所述的无人机的机架组件,其特征在于,在所述导向轴上形成有用于阻碍所述刚性施力件周向转动的阻挡部。
- 根据权利要求7所述的无人机的机架组件,其特征在于,所述阻挡部为设于所述导向轴外侧壁上的、沿轴向方向延伸的滑轨,对应的,所述刚性施力件的内侧壁上设有与所述滑轨配合的滑槽;或者,所述阻挡部为设于所述导向轴外侧壁上的、沿轴向方向延伸的滑槽,对应的,所述刚性施力件的内侧壁上设有与所述滑槽配合的滑轨;或者,所述导向轴的横截面为非圆形,所述刚性施力件的内侧壁形状与所述导向轴的横截面形状相匹配。
- 根据权利要求1所述的无人机的机架组件,其特征在于,所述同步装置包括连杆传动组件及/或啮合齿轮对。
- 根据权利要求9所述的无人机的机架组件,其特征在于,当所述同步装置包括连杆传动组件时,所述连杆传动组件中的其中至少一个连杆的转轴固定于所述安装座上。
- 根据权利要求10所述的无人机的机架组件,其特征在于,所述连杆传动组件包括中心连杆、第一过渡连杆、第一机臂连杆、第二过渡连杆、第二机臂连杆;在所述安装座上形成有第一直线滑道和第二直线滑道;所述中心连杆通过转轴可转动地连接在所述安装座上;所述第一过渡连杆的首端与所述中心连杆的一端铰接,所述第一过渡连杆的末端与所述第一机臂连杆的首端铰接;所述第一机臂连杆的末端与所述第一机臂铰接,所述第一过渡连杆与第一机臂连杆的铰接处滑设于所述第一直线滑道内;所述第二过渡连杆的首端与所述中心连杆的另一端铰接,所述第二过渡连杆的末端与所述第二机臂连杆的首端铰接,所述第二机臂连杆的末端与所 述第二机臂铰接,所述第二过渡连杆与第二机臂连杆的铰接处滑设于所述第二直线滑道内。
- 根据权利要求11所述的无人机的机架组件,其特征在于,所述第一直线滑道包括直线凹槽和/或直线通孔;及/或,所述第二直线滑道包括直线凹槽和/或直线通孔。
- 根据权利要求10所述的无人机的机架组件,其特征在于,所述连杆传动组件包括中心连杆、第一机臂连杆、第二机臂连杆;所述中心连杆通过转轴可转动地连接在所述安装座上;所述第一机臂连杆的首端与所述中心连杆的一端铰接,所述第一机臂连杆的末端与所述第一机臂铰接;所述第二机臂连杆的首端与所述中心连杆的另一端铰接,所述第二机臂连杆的末端与所述第二机臂铰接。
- 根据权利要求11或13所述的无人机的机架组件,其特征在于,所述中心连杆上形成有所述凸部。
- 根据权利要求9所述的无人机的机架组件,其特征在于,所述同步装置包括啮合齿轮对时,所述啮合齿轮对包括与第一机臂固定连接的第一齿轮,以及与第二机臂固定连接的第二齿轮,所述第一齿轮与第二齿轮啮合传动。
- 一种无人机的机架组件,其特征在于,包括:中心架,与所述中心架可转动连接的第一机臂、第二机臂,及用于将所述第一机臂与第二机臂同步锁定的锁定机构,所述锁定机构包括:同步装置、锁定装置和安装座;所述第一机臂和所述第二机臂能相对于安装座转动,安装座相对于中心架保持不动;所述同步装置包括中心连杆、第一机臂连杆组、第二机臂连杆组,所述中心连杆可转动地连接在所述安装座上;所述中心连杆的一端与所述第一机臂连杆组的首端铰接,所述第一机臂连杆组的末端与所述第一机臂铰接;所述中心连杆的另一端与所述第二机臂连杆组的首端铰接,所述第二机臂连杆组的末端与所述第二机臂铰接;所述中心连杆、第一机臂连杆组、第二机臂连杆组用于传递动力以驱动所述第一机臂和所述第二机臂同步转动;所述锁定装置设于所述安装座与所述中心连杆之间,所述锁定装置包括锁定状态和解锁状态,在所述锁定状态下,所述锁定装置提供阻力以阻碍所述中心连杆转动,直至在外力作用下克服所述阻力,所述锁定装置切换为解锁状态,所述中心连杆能够相对于安装座转动。
- 根据权利要求16所述的无人机的机架组件,其特征在于,所述第一机臂连杆组包括:第一过渡连杆,第一机臂连杆,以及形成于所述安装座上的第一直线滑道;所述第一过渡连杆的首端与所述中心连杆的一端铰接,所述第一过渡连杆的末端与所述第一机臂连杆的首端铰接;所述第一机臂连杆的末端与所述第一机臂铰接;所述第一过渡连杆与第一机臂连杆的铰接处滑设于所述第一直线滑道内;所述第二机臂连杆组包括:第二过渡连杆,第二机臂连杆,以及形成于所述安装座上的第二直线滑道;所述第二过渡连杆的首端与所述中心连杆的另一端铰接,所述第二过渡连杆的末端与所述第二机臂连杆的首端铰接,所述第二机臂连杆的末端与所述第二机臂铰接;所述第二过渡连杆与第二机臂连杆的铰接处滑设于所述第二直线滑道内。
- 根据权利要求17所述的无人机的机架组件,其特征在于,所述第一直线滑道包括直线凹槽和/或直线通孔;及/或,所述第二直线滑道包括直线凹槽和/或直线通孔。
- 根据权利要求17所述的无人机的机架组件,其特征在于,所述第一过渡连杆与第一机臂连杆的铰接处设有第一滑块,所述第一滑块与所述第一直线滑道配合;及/或,所述第二过渡连杆与第二机臂连杆的铰接处设有第二滑块,所述第二滑块与所述第二直线滑道配合。
- 根据权利要求16所述的无人机的机架组件,其特征在于,所述第一机臂连杆组至多包括第一机臂连杆;所述第二机臂连杆组至多包括第二机臂连杆;所述中心连杆通过转轴可转动地连接在所述安装座上;所述第一机臂连杆的首端与所述中心连杆的一端铰接,所述第一机臂连杆的末端与所述第一机臂铰接;所述第二机臂连杆的首端与所述中心连杆的另一端铰接,所述第二机臂连杆的末端与所述第二机臂铰接。
- 根据权利要求16所述的无人机的机架组件,其特征在于,所述中心 连杆包括凸部;所述锁定装置包括设置于所述安装座上的、用于所述凸部配合的弹性抵顶组件;所述弹性抵顶组件抵顶所述中心连杆上的凸部,以阻碍所述中心连杆转动;当在外力作用下所述中心连杆克服所述弹性抵顶组件所施加的弹性阻力,所述中心连杆能够继续转动。
- 根据权利要求21所述的无人机的机架组件,其特征在于,所述弹性抵顶组件包括与所述凸部配合的配合凹部;当所述凸部位于所述配合凹部内时,所述锁定装置将所述中心连杆维持在锁定状态;在所述中心连杆转动至凸部逐渐脱离配合凹部的过程中,所述弹性抵顶组件逐渐被压缩,该具有凸部的传动件从锁定状态切换至解锁状态;在所述中心连杆转动至凸部逐渐进入配合凹部的过程中,所述弹性抵顶组件逐渐被释放,该具有凸部的传动件逐渐从解锁状态切换至锁定状态。
- 根据权利要求22所述的无人机的机架组件,其特征在于,所述凸部沿平行于所述中心连杆的转动轴线方向向外凸出。
- 根据权利要求22所述的无人机的机架组件,其特征在于,所述中心连杆上的凸部包括多个,所述凸部所在端面上还形成有多个凹部,多个所述凸部和凹部连续排列形成波浪状端面;所述弹性抵顶组件上形成有用于与所述波浪状端面配合的波浪状配合面。
- 根据权利要求21所述的无人机的机架组件,其特征在于,所述弹性抵顶组件包括用于与所述凸部配合的刚性施力件,以及设置于所述刚性施力件与安装座之间的弹性元件。
- 根据权利要求25所述的无人机的机架组件,其特征在于,所述中心连杆通过连杆转轴与安装座可转动地连接,所述刚性施力件、所述弹性元件套设于所述连杆转轴上。
- 根据权利要求24所述的无人机的机架组件,其特征在于,所述连杆转轴上形成有用于阻碍所述刚性施力件周向转动的阻挡部。
- 根据权利要求27所述的无人机的机架组件,其特征在于,所述阻挡部为设于所述连杆转轴外侧壁上的、沿轴向方向延伸的滑轨,对应的,所述刚性施力件的内侧壁上设有与所述滑轨配合的滑槽;或者,所述阻挡部为设于所述连杆转轴外侧壁上的、沿轴向方向延伸的滑槽,对应的,所述刚性施力件的内侧壁上设有与所述滑槽配合的滑轨;或者,所述连杆转轴的横截面为非圆形,所述刚性施力件的内侧壁形状与所述导向轴的横截面形状相匹配。
- 根据权利要求22所述的无人机的机架组件,其特征在于,所述凸部沿所述中心连杆的径向方向向外凸出。
- 根据权利要求16所述的无人机的机架组件,其特征在于,所述锁定装置与所述中心连杆中的其中一个套设于所述锁定装置与所述中心连杆中的另一个的外侧,在锁定装置与所述中心连杆中的其中一个的侧壁上具有通孔,在所述锁定装置与所述中心连杆中的其中一个上、且位于所述通孔处形成有弹性锁扣,所述弹性锁扣上靠近所述通孔的一侧设有卡锁部,在所述锁定装置与所述中心连杆中的另一个的外侧壁上设有与所述卡锁部配合的配合部;在初始状态时,所述卡锁部穿过所述通孔卡入所述配合部中,以阻碍所述中心连杆转动;所述弹性锁扣在外力作用下沿远离所述通孔的方向运动,以使所述卡锁部脱离所述配合部,所述中心连杆能够转动。
- 根据权利要求30所述的无人机的机架组件,其特征在于,所述弹性锁扣包括连接端和自由端,所述连接端用于与所述锁定装置与所述中心连杆中的其中一个的侧壁连接,所述自由端远离所述连接端。
- 根据权利要求31所述的无人机的机架组件,其特征在于,在所述连接端与所述卡锁部之间的至少一段为弹性段。
- 根据权利要求31所述的无人机的机架组件,其特征在于,所述弹性锁扣包括刚性本体,以及设置在刚性本体与锁定装置与中心连杆中的其中一个的侧壁之间的扭簧,所述卡锁部位于刚性本体上。
- 根据权利要求31所述的无人机的机架组件,其特征在于,所述弹性锁扣为弹簧钢片。
- 一种无人机,其特征在于,包括机架组件以及设于所述机架组件上的动力装置,所述动力装置用于提供飞行动力给所述无人机;其中,机架组件,包括:中心架,与所述中心架可转动连接的第一机臂、 第二机臂,以及用于将所述第一机臂与第二机臂同步锁定的锁定机构,所述锁定机构包括:同步装置、锁定装置和安装座;所述第一机臂和所述第二机臂能相对于安装座转动,安装座相对于中心架保持不动;所述同步装置设于所述第一机臂与所述第二机臂之间,所述同步装置包括多个可相对转动的传动件,多个传动件转动以使第一机臂与第二机臂同步转动;所述锁定装置用于锁定多个传动件中的至少一个,所述同步装置中的至少一个传动件上设有凸部,所述锁定装置包括设置于所述安装座上的、用于所述凸部配合的弹性抵顶组件;所述弹性抵顶组件抵顶所述同步装置中的至少一个传动件上的凸部,以阻碍该具有凸部的传动件转动;当在外力作用下该具有凸部的传动件克服所述弹性抵顶组件所施加的弹性阻力,该具有凸部的传动件能够继续转动。
- 根据权利要求35所述的无人机,其特征在于,所述弹性抵顶组件包括与所述凸部配合的配合凹部;当所述凸部位于所述配合凹部内时,所述锁定装置将该具有凸部的传动件维持在锁定状态;在该具有凸部的传动件转动至凸部逐渐脱离配合凹部的过程中,所述弹性抵顶组件逐渐被压缩,该具有凸部的传动件从锁定状态切换至解锁状态;在该具有凸部的传动件转动至凸部逐渐进入配合凹部的过程中,所述弹性抵顶组件逐渐被释放,该具有凸部的传动件逐渐从解锁状态切换至锁定状态。
- 根据权利要求36所述的无人机,其特征在于,所述凸部沿平行于自身所在的传动件的转动轴线方向向外凸出。
- 根据权利要求37所述的无人机,其特征在于,一个传动件上的凸部包括多个,所述凸部所在端面上还形成有多个凹部,多个所述凸部和凹部连续排列形成波浪状端面;所述弹性抵顶组件上形成有用于与所述波浪状端面配合的波浪状配合面。
- 根据权利要求35所述的无人机,其特征在于,所述弹性抵顶组件包 括用于与所述凸部配合的刚性施力件,以及设置于所述刚性施力件与安装座之间的弹性元件。
- 根据权利要求39所述的无人机,其特征在于,所述安装座上固定有导向轴,所述刚性施力件和所述弹性元件套设在所述导向轴的外侧。
- 根据权利要求40所述的无人机,其特征在于,在所述导向轴上形成有用于阻碍所述刚性施力件周向转动的阻挡部。
- 根据权利要求41所述的无人机,其特征在于,所述阻挡部为设于所述导向轴外侧壁上的、沿轴向方向延伸的滑轨,对应的,所述刚性施力件的内侧壁上设有与所述滑轨配合的滑槽;或者,所述阻挡部为设于所述导向轴外侧壁上的、沿轴向方向延伸的滑槽,对应的,所述刚性施力件的内侧壁上设有与所述滑槽配合的滑轨;或者,所述导向轴的横截面为非圆形,所述刚性施力件的内侧壁形状与所述导向轴的横截面形状相匹配。
- 根据权利要求35所述的无人机,其特征在于,所述同步装置包括连杆传动组件及/或啮合齿轮对。
- 根据权利要求43所述的无人机,其特征在于,当所述同步装置包括连杆传动组件时,所述连杆传动组件中的其中至少一个连杆的转轴固定于所述安装座上。
- 根据权利要求44所述的无人机,其特征在于,所述连杆传动组件包括中心连杆、第一过渡连杆、第一机臂连杆、第二过渡连杆、第二机臂连杆;在所述安装座上形成有第一直线滑道和第二直线滑道;所述中心连杆通过转轴可转动地连接在所述安装座上;所述第一过渡连杆的首端与所述中心连杆的一端铰接,所述第一过渡连杆的末端与所述第一机臂连杆的首端铰接;所述第一机臂连杆的末端与所述第一机臂铰接,所述第一过渡连杆与第一机臂连杆的铰接处滑设于所述第一直线滑道内;所述第二过渡连杆的首端与所述中心连杆的另一端铰接,所述第二过渡连杆的末端与所述第二机臂连杆的首端铰接,所述第二机臂连杆的末端与所述第二机臂铰接,所述第二过渡连杆与第二机臂连杆的铰接处滑设于所述第二直线滑道内。
- 根据权利要求45所述的无人机,其特征在于,所述第一直线滑道包括直线凹槽和/或直线通孔;及/或,所述第二直线滑道包括直线凹槽和/或直线通孔。
- 根据权利要求44所述的无人机,其特征在于,所述连杆传动组件包括中心连杆、第一机臂连杆、第二机臂连杆;所述中心连杆通过转轴可转动地连接在所述安装座上;所述第一机臂连杆的首端与所述中心连杆的一端铰接,所述第一机臂连杆的末端与所述第一机臂铰接;所述第二机臂连杆的首端与所述中心连杆的另一端铰接,所述第二机臂连杆的末端与所述第二机臂铰接。
- 根据权利要求45或47所述的无人机,其特征在于,所述中心连杆上形成有所述凸部。
- 根据权利要求43所述的无人机,其特征在于,所述同步装置包括啮合齿轮对时,所述啮合齿轮对包括与第一机臂固定连接的第一齿轮,以及与第二机臂固定连接的第二齿轮,所述第一齿轮与第二齿轮啮合传动。
- 一种无人机,其特征在于,包括:机架组件以及设于所述机架组件上的动力装置,所述动力装置用于提供飞行动力给所述无人机;其中机架组件包括:中心架,与所述中心架可转动连接的第一机臂、第二机臂,及用于将所述第一机臂与第二机臂同步锁定的锁定机构,所述锁定机构包括:同步装置、锁定装置和安装座;所述第一机臂和所述第二机臂能相对于安装座转动,安装座相对于中心架保持不动;所述同步装置包括中心连杆、第一机臂连杆组、第二机臂连杆组,所述中心连杆可转动地连接在所述安装座上;所述中心连杆的一端与所述第一机臂连杆组的首端铰接,所述第一机臂连杆组的末端与所述第一机臂铰接;所述中心连杆的另一端与所述第二机臂连杆组的首端铰接,所述第二机臂连杆组的末端与所述第二机臂铰接;所述中心连杆、第一机臂连杆组、第二机臂连杆组用于传递动力以驱动所述第一机臂和所述第二机臂同步转动;所述锁定装置设于所述安装座与所述中心连杆之间,所述锁定装置包括 锁定状态和解锁状态,在所述锁定状态下,所述锁定装置提供阻力以阻碍所述中心连杆转动,直至中心连杆在外力作用下克服所述阻力,所述锁定装置切换为解锁状态,所述中心连杆能够相对于安装座转动。
- 根据权利要求50所述的无人机,其特征在于,所述第一机臂连杆组包括:第一过渡连杆,第一机臂连杆,以及形成于所述安装座上的第一直线滑道;所述第一过渡连杆的首端与所述中心连杆的一端铰接,所述第一过渡连杆的末端与所述第一机臂连杆的首端铰接;所述第一机臂连杆的末端与所述第一机臂铰接;所述第一过渡连杆与第一机臂连杆的铰接处滑设于所述第一直线滑道内;所述第二机臂连杆组包括:第二过渡连杆,第二机臂连杆,以及形成于所述安装座上的第二直线滑道;所述第二过渡连杆的首端与所述中心连杆的另一端铰接,所述第二过渡连杆的末端与所述第二机臂连杆的首端铰接,所述第二机臂连杆的末端与所述第二机臂铰接;所述第二过渡连杆与第二机臂连杆的铰接处滑设于所述第二直线滑道内。
- 根据权利要求51所述的无人机,其特征在于,所述第一直线滑道包括直线凹槽和/或直线通孔;及/或,所述第二直线滑道包括直线凹槽和/或直线通孔。
- 根据权利要求51所述的无人机,其特征在于,所述第一过渡连杆与第一机臂连杆的铰接处设有第一滑块,所述第一滑块与所述第一直线滑道配合;及/或,所述第二过渡连杆与第二机臂连杆的铰接处设有第二滑块,所述第二滑块与所述第二直线滑道配合。
- 根据权利要求50所述的无人机,其特征在于,所述第一机臂连杆组至多包括第一机臂连杆;所述第二机臂连杆组至多包括第二机臂连杆;所述中心连杆通过转轴可转动地连接在所述安装座上;所述第一机臂连杆的首端与所述中心连杆的一端铰接,所述第一机臂连杆的末端与所述第一机臂铰接;所述第二机臂连杆的首端与所述中心连杆的另一端铰接,所述第二机臂连杆的末端与所述第二机臂铰接。
- 根据权利要求50所述的无人机,其特征在于,所述中心连杆包括凸部;所述锁定装置包括设置于所述安装座上的、用于所述凸部配合的弹性抵 顶组件;所述弹性抵顶组件抵顶所述中心连杆上的凸部,以阻碍所述中心连杆转动;当在外力作用下所述中心连杆克服所述弹性抵顶组件所施加的弹性阻力,所述中心连杆能够继续转动。
- 根据权利要求55所述的无人机,其特征在于,所述弹性抵顶组件包括与所述凸部配合的配合凹部;当所述凸部位于所述配合凹部内时,所述锁定装置将所述中心连杆维持在锁定状态;在所述中心连杆转动至凸部逐渐脱离配合凹部的过程中,所述弹性抵顶组件逐渐被压缩,该具有凸部的传动件从锁定状态切换至解锁状态;在所述中心连杆转动至凸部逐渐进入配合凹部的过程中,所述弹性抵顶组件逐渐被释放,该具有凸部的传动件逐渐从解锁状态切换至锁定状态。
- 根据权利要求56所述的无人机,其特征在于,所述凸部沿平行于所述中心连杆的转动轴线方向向外凸出。
- 根据权利要求56所述的无人机,其特征在于,所述中心连杆上的凸部包括多个,所述凸部所在端面上还形成有多个凹部,多个所述凸部和凹部连续排列形成波浪状端面;所述弹性抵顶组件上形成有用于与所述波浪状端面配合的波浪状配合面。
- 根据权利要求55所述的无人机,其特征在于,所述弹性抵顶组件包括用于与所述凸部配合的刚性施力件,以及设置于所述刚性施力件与安装座之间的弹性元件。
- 根据权利要求59所述的无人机,其特征在于,所述中心连杆通过连杆转轴与安装座可转动地连接,所述刚性施力件、所述弹性元件套设于所述连杆转轴上。
- 根据权利要求58所述的无人机,其特征在于,所述连杆转轴上形成有用于阻碍所述刚性施力件周向转动的阻挡部。
- 根据权利要求61所述的无人机,其特征在于,所述阻挡部为设于所述连杆转轴外侧壁上的、沿轴向方向延伸的滑轨,对应的,所述刚性施力件的内侧壁上设有与所述滑轨配合的滑槽;或者,所述阻挡部为设于所述连杆转轴外侧壁上的、沿轴向方向延伸的 滑槽,对应的,所述刚性施力件的内侧壁上设有与所述滑槽配合的滑轨;或者,所述连杆转轴的横截面为非圆形,所述刚性施力件的内侧壁形状与所述导向轴的横截面形状相匹配。
- 根据权利要求56所述的无人机,其特征在于,所述凸部沿所述中心连杆的径向方向向外凸出。
- 根据权利要求50所述的无人机,其特征在于,所述锁定装置与所述中心连杆中的其中一个套设于所述锁定装置与所述中心连杆中的另一个的外侧,在锁定装置与所述中心连杆中的其中一个的侧壁上具有通孔,在所述锁定装置与所述中心连杆中的其中一个上、且位于所述通孔处形成有弹性锁扣,所述弹性锁扣上靠近所述通孔的一侧设有卡锁部,在所述锁定装置与所述中心连杆中的另一个的外侧壁上设有与所述卡锁部配合的配合部;在初始状态时,所述卡锁部穿过所述通孔卡入所述配合部中,以阻碍所述中心连杆转动;所述弹性锁扣在外力作用下沿远离所述通孔的方向运动,以使所述卡锁部脱离所述配合部,所述中心连杆能够转动。
- 根据权利要求64所述的无人机,其特征在于,所述弹性锁扣包括连接端和自由端,所述连接端用于与所述锁定装置与所述中心连杆中的其中一个的侧壁连接,所述自由端远离所述连接端。
- 根据权利要求65所述的无人机,其特征在于,在所述连接端与所述卡锁部之间的至少一段为弹性段。
- 根据权利要求65所述的无人机,其特征在于,所述弹性锁扣包括刚性本体,以及设置在刚性本体与锁定装置与中心连杆中的其中一个的侧壁之间的扭簧,所述卡锁部位于刚性本体上。
- 根据权利要求65所述的无人机,其特征在于,所述弹性锁扣为弹簧钢片。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/CN2017/104928 WO2019061473A1 (zh) | 2017-09-30 | 2017-09-30 | 无人机的机架组件及无人机 |
| CN201780026325.9A CN109070993B (zh) | 2017-09-30 | 2017-09-30 | 无人机的机架组件及无人机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/CN2017/104928 WO2019061473A1 (zh) | 2017-09-30 | 2017-09-30 | 无人机的机架组件及无人机 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019061473A1 true WO2019061473A1 (zh) | 2019-04-04 |
Family
ID=64822098
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/CN2017/104928 WO2019061473A1 (zh) | 2017-09-30 | 2017-09-30 | 无人机的机架组件及无人机 |
Country Status (2)
| Country | Link |
|---|---|
| CN (1) | CN109070993B (zh) |
| WO (1) | WO2019061473A1 (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112638765A (zh) * | 2019-12-31 | 2021-04-09 | 深圳市大疆创新科技有限公司 | 可折叠设备、无人飞行器及手持云台 |
| CN114162205A (zh) * | 2021-12-03 | 2022-03-11 | 好孩子儿童用品有限公司 | 儿童用品 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112278302B (zh) * | 2020-11-18 | 2022-11-11 | 广西树形图科技研发有限公司 | 一种可增大监控范围的安防监控用无人机及监控方法 |
| CN113665791B (zh) * | 2021-08-11 | 2023-06-16 | 广东空天科技研究院 | 一种适用于储能驱动薄型折叠机翼的锁定机构 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103010453A (zh) * | 2012-12-27 | 2013-04-03 | 北京理工大学 | 无人机折叠机翼展开锁死装置 |
| JP2014031058A (ja) * | 2012-08-02 | 2014-02-20 | Mitsuba Corp | ワイパアーム |
| CN205675222U (zh) * | 2016-02-22 | 2016-11-09 | 深圳市大疆创新科技有限公司 | 机架及使用该机架的无人机 |
| CN107031815A (zh) * | 2015-12-25 | 2017-08-11 | 北京臻迪机器人有限公司 | 无人机机臂锁止解锁装置及无人机 |
| CN107108042A (zh) * | 2016-09-21 | 2017-08-29 | 深圳市大疆创新科技有限公司 | 锁合装置、无人机及电子设备 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20100051742A1 (en) * | 2008-07-22 | 2010-03-04 | Terrafugia, Inc,; | Folding Wing & Locking Mechanism |
| US8210473B2 (en) * | 2008-07-22 | 2012-07-03 | Terrafugia, Inc. | Folding wing root mechanism |
| CN101383568B (zh) * | 2008-10-24 | 2011-01-26 | 哈尔滨工业大学 | 一种折叠充气展开式太阳能电池帆板同步展开机构 |
| CN102556336A (zh) * | 2011-12-30 | 2012-07-11 | 北京理工大学 | 一种折叠翼无人机机翼快速展开装置 |
| CN102765492B (zh) * | 2012-07-03 | 2014-07-23 | 浙江理工大学 | 剪叉式空间伸展臂机构 |
| CN104802978B (zh) * | 2015-04-29 | 2017-04-12 | 北京威标至远科技发展有限公司 | 一种飞行器折叠翼装置 |
| CN105035318B (zh) * | 2015-09-01 | 2017-03-29 | 湖南云顶智能科技有限公司 | 一种多旋翼无人机 |
-
2017
- 2017-09-30 WO PCT/CN2017/104928 patent/WO2019061473A1/zh active Application Filing
- 2017-09-30 CN CN201780026325.9A patent/CN109070993B/zh not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014031058A (ja) * | 2012-08-02 | 2014-02-20 | Mitsuba Corp | ワイパアーム |
| CN103010453A (zh) * | 2012-12-27 | 2013-04-03 | 北京理工大学 | 无人机折叠机翼展开锁死装置 |
| CN107031815A (zh) * | 2015-12-25 | 2017-08-11 | 北京臻迪机器人有限公司 | 无人机机臂锁止解锁装置及无人机 |
| CN205675222U (zh) * | 2016-02-22 | 2016-11-09 | 深圳市大疆创新科技有限公司 | 机架及使用该机架的无人机 |
| CN107108042A (zh) * | 2016-09-21 | 2017-08-29 | 深圳市大疆创新科技有限公司 | 锁合装置、无人机及电子设备 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112638765A (zh) * | 2019-12-31 | 2021-04-09 | 深圳市大疆创新科技有限公司 | 可折叠设备、无人飞行器及手持云台 |
| CN114162205A (zh) * | 2021-12-03 | 2022-03-11 | 好孩子儿童用品有限公司 | 儿童用品 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN109070993B (zh) | 2022-04-26 |
| CN109070993A (zh) | 2018-12-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2019061473A1 (zh) | 无人机的机架组件及无人机 | |
| CN113795683B (zh) | 一种转轴机构和电子设备 | |
| CN109070991B (zh) | 无人机的机架组件及无人机 | |
| EP3029527B1 (en) | Rotational force drive assembly and processing box | |
| CN110594279B (zh) | 变距装置及折叠显示装置 | |
| US20110229251A1 (en) | Joint structure with a stable unlocked state for a foldable playpen | |
| CN110701176A (zh) | 柔性屏转动结构和柔性屏 | |
| WO2015043043A1 (zh) | 一种旋转力驱动组件以及处理盒 | |
| US20170015403A1 (en) | Unmanned aerial vehicle arm adjustment device and unmanned aerial vehicle | |
| CN110675746A (zh) | 折叠显示装置及折叠手机 | |
| CN106541977B (zh) | 婴儿承载装置 | |
| CN108883823B (zh) | 机臂锁定机构及飞行器 | |
| CN212935953U (zh) | 一种折叠装置及电子设备 | |
| WO2019061415A1 (zh) | 无人机的机架组件及无人机 | |
| JP2021068693A (ja) | バッテリーの組構造 | |
| CN110879643B (zh) | 铰链结构及可折叠电子设备 | |
| WO2019041221A1 (zh) | 飞行器的变形机架及飞行器 | |
| WO2020150859A1 (zh) | 天线支架、天线组件及可移动平台 | |
| CN211174974U (zh) | 变距装置及折叠显示装置 | |
| CN211083413U (zh) | 折叠铰链及折叠显示装置 | |
| CN110677515B (zh) | 同步机构及折叠显示装置 | |
| CN110594547A (zh) | 折叠铰链及折叠显示装置 | |
| CN110730257A (zh) | 固定装置、折叠铰链及折叠显示装置 | |
| CN108015798B (zh) | 一种可释放和锁紧的空间机械臂关节 | |
| CN116221261A (zh) | 一种铰链装置、电子设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17927383 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 17927383 Country of ref document: EP Kind code of ref document: A1 |