WO2019003602A1 - 衝突推定装置および衝突推定方法 - Google Patents
衝突推定装置および衝突推定方法 Download PDFInfo
- Publication number
- WO2019003602A1 WO2019003602A1 PCT/JP2018/016245 JP2018016245W WO2019003602A1 WO 2019003602 A1 WO2019003602 A1 WO 2019003602A1 JP 2018016245 W JP2018016245 W JP 2018016245W WO 2019003602 A1 WO2019003602 A1 WO 2019003602A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- moving object
- vehicle
- collision
- trajectory
- extraction area
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 19
- 230000008859 change Effects 0.000 claims abstract description 90
- 238000000605 extraction Methods 0.000 claims abstract description 67
- 238000003384 imaging method Methods 0.000 claims description 22
- 230000008569 process Effects 0.000 description 9
- 230000007246 mechanism Effects 0.000 description 8
- 230000000875 corresponding effect Effects 0.000 description 6
- 238000001514 detection method Methods 0.000 description 5
- 238000005259 measurement Methods 0.000 description 5
- 230000004044 response Effects 0.000 description 5
- 230000000903 blocking effect Effects 0.000 description 3
- 238000004590 computer program Methods 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000003111 delayed effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000002040 relaxant effect Effects 0.000 description 1
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0134—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to imminent contact with an obstacle, e.g. using radar systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
Definitions
- the present disclosure relates to the estimation of a collision between a vehicle and a moving object different from the vehicle.
- the movement trajectory of the moving object is estimated, and the collision possibility between the own vehicle and the moving object Various methods for estimating have been proposed.
- the movement trajectory of the moving object can be estimated more accurately by measuring the position of the moving object by taking a longer time using a camera or a millimeter wave radar, and the estimation accuracy of the collision possibility is It can improve.
- the response operation such as an alarm output may be delayed.
- Patent Document 1 when a pedestrian is found in a region set in the vicinity of a stopping vehicle which is a shielding object, the collision estimation can be performed in a shorter time by relaxing a reference condition used for collision estimation (collision determination) Methods are disclosed. Further, as relaxation of the reference condition, for example, it is disclosed that the number of images (the number of frames) used when obtaining the trajectory of a moving object is reduced as compared with other cases.
- Patent No. 5729416 gazette
- the collision is estimated when a pedestrian is recognized within a predetermined area even if the trajectory of the vehicle is away from the moving object because the vehicle is steered.
- the standard conditions used for will be relaxed.
- the reference condition is unnecessarily relaxed despite the relatively long time delay until the countermeasure operation for collision avoidance is performed, and the accuracy of the collision estimation is reduced needlessly . Therefore, there is a need for a technology that can complete the collision estimation early according to the situation while suppressing the decrease in the collision estimation accuracy.
- the present disclosure has been made to solve at least a part of the problems described above, and can be implemented as the following modes.
- a collision estimation device which is mounted on a vehicle and estimates a collision between the moving object different from the vehicle and the vehicle.
- the collision estimation device estimates a trajectory of the moving object based on information obtained in time series from a first trajectory sensor that estimates the trajectory of the vehicle; and a first sensor used to recognize the moving object.
- Moving object trajectory estimation unit an obstacle identification unit identifying the position and size of an obstacle present on the vehicle in the traveling direction side of the vehicle; and the position and size of the identified obstacle Moving object extraction area setting unit for setting a moving object extraction area using the position and size of the shield as a basis;
- Direction change information acquisition for acquiring direction change information indicating a change in the traveling direction of the vehicle Using the unit, the estimated trajectory of the vehicle, the estimated trajectory of the moving object, and the acquired direction change information to estimate the presence or absence of a collision between the vehicle and the moving object Collision estimation unit; and
- the collision estimation unit is configured to move the moving object when the moving object is recognized in the moving object extraction area and the change in the traveling direction indicated by the acquired direction change information is not a direction away from the shielding object;
- the collision is performed using the trajectory of the moving object estimated based on the information obtained from the first sensor in a shorter time than when the moving object is recognized in a region different from the object extraction region.
- the trajectory of the moving object estimated based on the information obtained from the first sensor at the same time or longer time than when the moving object is recognized in a region different from the moving object extraction region And use, to infer the presence or absence of the collision.
- the moving object extraction is performed.
- the presence or absence of a collision is estimated using the trajectory of the moving object estimated based on the information obtained from the first sensor in a shorter time. Because of this, it is possible in a short time even if there is relatively little time delay before executing the response action for collision avoidance, such as “moving objects appear from behind the shield and move toward the trajectory of the vehicle”. Collision estimation can be completed.
- the movement is performed in an area different from the moving object extraction area Since the vehicle's presence or absence is estimated using the trajectory of the moving object estimated based on the information obtained from the first sensor at the same time or longer than that when the object is recognized, the vehicle In the situation where the possibility of a collision with a moving object is low away from the shielding object, it is possible to suppress a decrease in collision estimation accuracy. As described above, according to the collision estimation device of the above embodiment, it is possible to complete the collision estimation early according to the situation while suppressing the decrease in the collision estimation accuracy.
- the present disclosure can also be implemented in various forms other than the collision estimation device.
- it can be realized in the form of a collision estimation method, a computer program for realizing such a method, a storage medium storing such a computer program, a vehicle equipped with a collision estimation device, and the like.
- FIG. 1 is a block diagram showing the configuration of a collision estimation apparatus according to an embodiment of the present disclosure
- FIG. 2 is a flowchart showing the procedure of the collision estimation process
- FIG. 3 is an explanatory view showing an example of the collision estimation process
- FIG. 4 is an explanatory view showing a setting example of a moving object extraction area
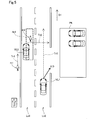
- FIG. 5 is an explanatory view showing an example of the collision estimation process
- FIG. 6 is an explanatory view showing a setting example of the moving object extraction area.
- “moving objects different from vehicles” means movable objects or creatures such as pedestrians, bicycles, motorcycles, and unmanned vehicles.
- a vehicle on which the collision estimation device 10 is mounted may be referred to as a "own vehicle”.
- the collision estimation device 10 is configured by an ECU (Electronic Control Unit) equipped with a microcomputer and a memory.
- ECU Electronic Control Unit
- the collision estimation device 10 is electrically connected to various devices mounted on the vehicle, and exchanges data with the various devices. Specifically, as shown in FIG. 1, the collision estimation device 10 includes the millimeter wave radar 21, the imaging device 22, the yaw rate sensor 23, the steering angle sensor 24, the vehicle speed sensor 25, the brake ECU 201, and the alarm ECU 202, respectively. It is connected to to exchange data.
- the millimeter wave radar 21 uses radio waves in the millimeter wave band to detect the presence or absence of an object on the traveling direction side of the vehicle (forward when the vehicle is moving forward), the distance from the object to the vehicle, the object The position of the object, the size of the object, the shape of the object and the relative velocity of the object to the vehicle are detected.
- the “object” detected by the millimeter wave radar 21 is more accurately a set of a plurality of detection points (targets).
- the millimeter wave radar 21 When the ignition of the host vehicle is turned on, the millimeter wave radar 21 repeatedly executes irradiation of millimeter wave radio waves and reception of its reflected wave, and detection of an object (target).
- the imaging device 22 is configured of an imaging camera provided with a lens for collecting light and a light receiving element, and images the traveling direction side of the host vehicle to obtain a captured image.
- the imaging device 22 When the ignition of the host vehicle is turned on, the imaging device 22 repeatedly executes acquisition of a captured image (frame image). For example, an image of 30 frames is acquired per second.
- the frame rate at the time of imaging is not limited to 30 frames per second, and may be an arbitrary value.
- the yaw rate sensor 23 detects the yaw rate (rotational angular velocity) of the host vehicle.
- the yaw rate sensor 23 repeatedly executes detection of the yaw rate when the ignition of the host vehicle is turned on.
- the steering angle sensor 24 detects the steering wheel steering angle of the host vehicle.
- the steering angle sensor 24 repeatedly executes the detection of the steering angle when the ignition of the host vehicle is turned on.
- the vehicle speed sensor 25 detects the speed of the host vehicle.
- the vehicle speed sensor 25 repeatedly executes the detection of the speed of the host vehicle when the ignition of the host vehicle is turned on.
- the brake ECU 201 is an ECU for brake control, and is electrically connected to the collision estimation device 10 and the brake mechanism 211.
- the brake ECU 201 determines the timing to apply the brake and the amount of braking (the amount of braking) and controls the brake mechanism 211.
- the brake mechanism 211 is composed of a sensor, a motor, a valve, a pump, various actuators, and the like involved in the brake control.
- the alarm ECU 202 is an ECU for alarm output, and is electrically connected to the collision estimation device 10 and the alarm mechanism 212.
- the alarm ECU 202 determines the timing of outputting an alarm and the content of the output, and controls the alarm mechanism 212. In the present embodiment, the alarm is output as a sound for alerting a collision with a moving object.
- the alarm mechanism 212 is a device related to audio output such as a speaker and an amplifier.
- the brake ECU 201 and the alarm ECU 202 control the brake mechanism 211 and the alarm mechanism 212, respectively, to cope with collision avoidance. Execute the action. Specifically, an automatic brake is applied and an alarm is issued.
- the collision estimation device 10 includes a vehicle trajectory estimation unit 11, a moving object trajectory estimation unit 12, a shielding object identification unit 13, a moving object extraction area setting unit 14, a direction change information acquisition unit 15, and a collision estimation unit 16. Is equipped. These functional units 11 to 16 are realized by the microcomputer of the collision estimation device 10 executing a control program stored in advance in the collision estimation device 10.
- the vehicle locus estimation unit 11 estimates the locus of the host vehicle based on values obtained periodically in time series from the yaw rate sensor 23, the steering angle sensor 24, and the vehicle speed sensor 25. Specifically, the yaw rate, steering angle, and vehicle speed, which are obtained periodically, are stored as a history, and the planned passing position and the planned passing time of the vehicle are estimated as the trajectory of the vehicle based on the history of a predetermined period. Do.
- the moving object trajectory estimation unit 12 generates a moving object trajectory based on values periodically obtained from the millimeter wave radar 21 in time series and values obtained periodically from the imaging device 22 (frame image data). Estimate the trajectory. Specifically, by combining the position and distance of each target obtained from the millimeter wave radar 21 and the image data obtained from the imaging device 22, the type, position, size, moving direction, and moving speed of the moving object are obtained. presume. Then, the estimated passing position of the moving object and the estimated passing time are estimated as the trajectory of the moving object.
- the type of moving object may be estimated, for example, by pattern matching based on the shape in the frame image.
- the obstacle identification unit 13 identifies the position and the size of the obstacle located on the traveling direction side with respect to the host vehicle.
- the shield is an object that may block moving objects from the millimeter wave radar 21 and the imaging device 22, and means, for example, a non-moving object such as a stopped or parked vehicle, a telephone pole, or a signboard.
- the above-mentioned "do not move” may also include a state of moving at a low speed (forward or backward), in addition to the stopped state. For example, a vehicle that moves at a speed of less than 20 km per hour in the same direction as the traveling direction of the host vehicle is also an object that does not move and corresponds to a shield. Only the stopped state may mean "do not move".
- the shield identification unit 13 determines the position of the shield based on values periodically obtained from the millimeter wave radar 21 in time series and values periodically obtained from the imaging device 22 (frame image data). And identify the size.
- the moving object extraction area setting unit 14 sets a moving object extraction area based on the position and the size of the shielding object using the position and the size of the shielding object specified by the shielding object specifying unit 13.
- the moving object extraction region is a trajectory of a moving object used when estimating a collision with the vehicle under a predetermined condition when a moving object is recognized (extracted) in such a region, and a region different from such a region
- the trajectory estimated based on the values of the millimeter wave radar 21 and the imaging device 22 obtained in a shorter time than when a moving object is recognized in is used in the region. Details of the moving object extraction area will be described later.
- the direction change information acquisition unit 15 acquires direction change information indicating a change in the traveling direction of the host vehicle.
- the direction change information means a change in the steering wheel steering angle obtained from the steering angle sensor 24.
- the traveling direction of the host vehicle changes.
- the collision estimation unit 16 includes the trajectory of the host vehicle estimated by the vehicle trajectory estimation unit 11, the trajectory of the moving object estimated by the moving object trajectory estimation unit 12, and the direction change information obtained by the direction change information acquisition unit 15. That is, the steering angle is used to estimate the presence or absence of a collision between the host vehicle and the automatic body.
- the collision estimation apparatus 10 having the above configuration can complete the collision estimation early according to the situation while suppressing a decrease in the collision estimation accuracy between the own vehicle and the moving object by executing a collision estimation process described later.
- the above-mentioned millimeter wave radar 21 and imaging device 22 correspond to a subordinate concept of the first sensor in the means for solving the problem. Further, the steering angle sensor 24 corresponds to a subordinate concept of the second sensor in the means for solving the problem. Further, the imaging device 22 corresponds to a subordinate concept of the imaging unit in the means for solving the problem.
- Collision estimation process The collision estimation process shown in FIG. 2 is executed in the collision estimation device 10 when the ignition of the host vehicle is turned on.
- the obstacle specifying unit 13 specifies the position and the size of the shield located on the traveling direction side with respect to the host vehicle (step S100).
- the shield specifying unit 13 specifies the vehicle VL2 as a shield and specifies its position and size.
- the moving object extraction area setting unit 14 sets a moving object extraction area based on the position and the size of the shielding specified in step S100 (step S105). In the example of FIG. 3, the moving object extraction area Ar1 is set.
- the moving object extraction area Ar1 is a trajectory of the vehicle along the orthogonal direction from the center P1 along the orthogonal direction orthogonal to the traveling direction D1 at the front end surface S1 of the vehicle VL2 which is a shield.
- a side from a point P11 separated by a first distance L1 determined in advance to a side closer to the locus Tr0 shown in FIG. 3 is one side, and is previously determined from the rear end P2 of the vehicle VL2 along the traveling direction D1 from the center P1 described above. It is set as a rectangular area in a plan view with one side up to a point P3 separated by the second distance L2.
- the first distance L1 may be, for example, 1.5 m (meters).
- the second distance L2 may be, for example, 5.0 m.
- the values of the first distance L1 and the second distance L2 are not limited to these values, and may be set to arbitrary values.
- the rear end P2 means the end of the targets of the vehicle VL2 obtained by the millimeter wave radar 21 that is determined based on the target on the farthest side along the traveling direction D1. Therefore, the actual rear end of the vehicle VL2 (the deepest point along the traveling direction D1) may not be set as the rear end P2.
- the moving object extraction area Ar1 set as described above is an area in the vicinity of the vehicle VL2, and when the moving object jumps out from an area (dead spot) blocked by the vehicle VL2 when viewed from the vehicle VL1. This is an area in which there is relatively little time delay until the response operation for collision avoidance is performed.
- a person m2 as a moving object is present in the moving object extraction area Ar1.
- the moving object trajectory estimation unit 12 determines whether there is a moving object on the traveling direction side (step S110). When it is determined that there is no moving object on the traveling direction side (step S110: NO), the process returns to step S100 described above.
- step S110 when it is determined that there is a moving object on the traveling direction side (step S110: YES), the moving object trajectory estimation unit 12 determines whether the moving object exists in the moving object extraction area or not. It determines (step S115). In the example of FIG. 3, the moving object trajectory estimation unit 12 recognizes the person m1 as a moving object on the sidewalk next to the first lane Ln1, and recognizes the person m2 as a moving object in the moving object extraction area Ar1. Do. Therefore, in step S110, it is determined that there are a plurality of moving objects (two persons m1 and m2) on the traveling direction D1 side. In such a case, the process from step S115 is executed for each moving object.
- the moving object person m1 is not present in the moving object extraction area Ar1. In this case, it is determined that the moving object does not exist in the moving object extraction area (step S115: NO), and the vehicle trajectory estimation unit 11 estimates the trajectory of the own vehicle (step S120).
- a locus in which the host vehicle travels straight in the second lane Ln2 currently being traveled is estimated as the locus Tr0 of the host vehicle.
- the moving object trajectory estimation unit 12 calculates the image data of the standard number of frames and the measurement result of the millimeter wave radar 21 obtained in the period corresponding to the period when the image data of the number of frames is obtained.
- the trajectory of the moving object is estimated (step S125).
- the standard number of frames is five.
- the number of frames is not limited to five and may be an arbitrary number of frames.
- a trajectory Tr1 of a person m1 as a moving object is estimated.
- the collision estimation unit 16 determines the presence or absence of a collision between the own vehicle and the moving object based on the trajectory of the own vehicle estimated in step S120 and the moving object trajectory estimated in step S125. It estimates (step S130). In the example of FIG. 3, the locus Tr0 of the vehicle VL1 and the locus Tr1 of the person m1 as a moving object do not intersect. Therefore, for the person m1, it is determined that "no collision has occurred". After execution of step S130, the process returns to step S100 described above.
- step S115 since the person m2 exists in the moving object extraction area Ar1, it is determined that "the moving object exists in the moving object extraction area" (step S115: YES). In this case, the vehicle trajectory estimation unit 11 estimates the trajectory of the host vehicle (step S135). Since this step S135 is the same as step S120 described above, the detailed description will be omitted. If the trajectory of the host vehicle has already been estimated in the processing for another moving object (for example, step S120), step S135 may be omitted using the estimation result. Similarly, also in step S120 described above, if the trajectory of the host vehicle has already been estimated in the processing for another moving object (for example, step S135), step S120 is omitted using the estimation result. You may
- step S140 the direction change information acquisition unit 15 acquires direction change information (step S140).
- the information that there is no change in the steering wheel steering angle, that is, "there is no change in the traveling direction of the host vehicle" is obtained.
- the direction change information acquiring unit 15 determines whether the change in the traveling direction of the host vehicle is a change in the direction away from the shield (step S145). As in the example of FIG. 3, when it is determined that there is no change in the steering angle, it is determined that the change in the direction away from the shield is not (step S145: NO). In this case, the moving object trajectory estimation unit 12 moves the moving object based on the image data of the reduced frame number and the measurement result of the millimeter wave radar 21 obtained in the period corresponding to the period when the image data of the frame number is obtained. The trajectory of is estimated (step S150).
- the reduced number of frames means the number of frames smaller than the “standard number of frames” in step S125 described above, and is “3 frames” in the present embodiment.
- the number of frames is not limited to three, and may be an arbitrary number of frames smaller than the standard number of frames.
- step S150 unlike in step S125 described above, movement is performed based on the image data of the reduced frame number and the measurement result of the millimeter wave radar 21 obtained in the period according to the period in which the image data of the frame number is obtained. Since the trajectory of the object is estimated, the time required to estimate the trajectory of the moving object is shorter than in step S125.
- step S130 After execution of step S150, the above-mentioned step S130 is performed.
- the collision estimation device 10 when it is determined that "collision occurrence", the collision estimation device 10 notifies the brake ECU 201 and the alarm ECU 202 of "collision occurrence" and information on the collision position, and based on the information, The corresponding action for collision avoidance described above is performed.
- step S145 If it is determined in step S145 described above that the change in the traveling direction of the host vehicle is a change in the direction away from the shield (step S145: YES), the above-described step S125 is performed. That is, the trajectory of the moving object is estimated based on the image data of the standard number of frames and the measurement result of the millimeter wave radar 21 obtained in the period according to the period when the image data of the number of frames is obtained.
- step S140 information indicating a change ⁇ D in the direction of turning to the right is acquired as the change in the traveling direction of the host vehicle. Therefore, in step S145, the direction change information acquiring unit 15 determines that the change in the traveling direction of the vehicle VL1 is a direction away from the vehicle VL2 which is a shielding object (step S145: YES).
- the trajectory of the moving object is based on the image data of the standard number of frames and the measurement result of the millimeter wave radar 21 obtained in the period corresponding to the period when the image data of such number of frames is obtained.
- the locus Tr0 estimated as the locus of the vehicle VL1 is a locus that goes straight on in the second lane Ln2, but the change in the direction in which the traveling direction turns to the right Because of the change in direction, the possibility of collision with the person m2 is low.
- the time margin is relatively large for the execution of the response operation for collision avoidance. Therefore, in such a case, the collision estimation device 10 is configured to improve the estimation accuracy of the trajectory of the moving object by using frame image data of the standard number of frames.
- the moving object (person m2) is recognized in the moving object extraction area Ar1, and the change in the traveling direction indicated by the acquired direction change information is a shield If it is not in the direction away from (vehicle VL2), the first sensor (millimeter wave radar 21 and the milliwave radar 21 and in a shorter time than when the moving object (person m1) is recognized in the area different from the moving object extraction area Ar1.
- the moving object Since the occurrence of a collision is estimated using the trajectory Tr2 of the moving object (person m2) estimated based on the information obtained from the imaging device 22), the moving object (from the shadow of the shielding object (vehicle VL2) It is possible to complete the collision estimation in a short time even in a situation where there is relatively little time delay before performing the response operation for collision avoidance such as the appearance of the person m2 and movement toward the trajectory Tr0 of the vehicle. .
- the moving object (person m2) is recognized in the moving object extraction area Ar1
- the change ⁇ D in the traveling direction indicated by the acquired direction change information is a direction away from the shielding object (vehicle VL2)
- the possibility of a collision with a moving object (person m2) is reduced since the vehicle VL1 is separated from the shielding object by using the trajectory of the moving object (person m2) to estimate the presence or absence of a collision occurrence.
- the collision estimation device 10 of the first embodiment the collision estimation can be completed early according to the situation while suppressing the decrease in the collision estimation accuracy.
- a side from a point P11 separated by L1 is taken as one side
- a side from a center P1 to a point P3 taken a predetermined second distance L2 from the rear end P2 of the shielding object (vehicle VL2) along the traveling direction D1
- the direction change information acquisition unit 15 acquires direction change information based on the value obtained from the steering angle sensor 24, that is, the steering wheel steering angle of the host vehicle, so that the change in the traveling direction D1 of the vehicle VL1 is a shield ( It can be accurately specified whether the vehicle is in the direction away from the vehicle VL2).
- the moving object extraction area Ar1 is set based on the position and the size of the vehicle VL2 which is one shielding object, but the present disclosure is not limited thereto.
- a moving object extraction area may be set based on the positions and sizes of a plurality of shields. Specifically, for example, as shown in FIG. 6, a vehicle VL3 stopped at a distance ⁇ L away from the vehicle VL2 along the traveling direction D1 with the above-described vehicle VL2 is recognized as a shield.
- the moving object extraction area Ar2 may be set as follows.
- the orthogonal direction Of the plurality of shields (two vehicles VL2 and VL3) from the center P1 with one side to a point P21 separated by a predetermined third distance L3 on the side approaching the trajectory Tr0 of the vehicle VL1 along the A rectangular area with one side from the rear end P12 of the innermost shield (vehicle VL3) to a point P13 separated by a predetermined fourth distance L4 along the traveling direction D1 is a moving object extraction area Ar2 It may be set.
- the third distance L3 may be, for example, 1.5 m as in the above-described first distance L1.
- the fourth distance L4 may be, for example, 5.0 m as in the above-described second distance L2.
- the values of the third distance L3 and the fourth distance L4 are not limited to these values, and may be set to arbitrary values.
- the position and shape of the moving object extraction area in the present disclosure are not limited to the position and shape of the moving object extraction area Ar1 of the first embodiment described above.
- the end point on the front side end face (end face S1) of the shielding object on the side closest to the trajectory Tr0 of the vehicle (vehicle VL1) is taken as a vertex, and a rectangular area having a side parallel to the traveling direction D1 is moved It may be an object extraction area.
- a point at a predetermined distance in the direction orthogonal to the traveling direction D1 from the end point closest to the trajectory Tr0 of the own vehicle (vehicle VL1) in the front end face of the shield is taken as a vertex and parallel to the traveling direction D1.
- a rectangular area having a side may be used as a moving object extraction area. Further, for example, a virtual line parallel to the traveling direction D1 passing through the center along the orthogonal direction orthogonal to the traveling direction D1 at the front end face of the shielding object, and the shielding object on the side closer to the locus Tr0 of the own vehicle (vehicle VL1)
- a circular area having a predetermined radius centered on an intersection of a traveling direction D1 passing through the center along the traveling direction D1 of the side face and a virtual line orthogonal to the traveling direction D1 may be used as a moving object extraction area.
- the moving object extraction regions in these examples can all be set using the position and size of the shield. That is, in general, an area based on the position and size of the shield may be set as the moving object extraction area based on the position and size of the shield.
- the direction change information means the change of the steering wheel steering angle obtained from the steering angle sensor 24, but the present disclosure is not limited to this.
- it may mean a change in tire steering angle obtained from a not-shown tire steering angle sensor mounted on the host vehicle.
- it may mean a change in the yaw rate obtained from the yaw rate sensor 23.
- it may mean information indicating the operating state of the direction indication device (turn indicator) mounted on the host vehicle.
- the operation state of the turn indicator is an operation state indicating a right turn
- the direction change information indicates that the change in the traveling direction of the host vehicle is on the right.
- the direction change information indicates that the change in the traveling direction of the host vehicle is on the left side.
- a vehicle includes map information for a navigation device (not shown)
- it may mean information obtained by specifying the type of a road on which the vehicle travels based on the map information.
- the type of the road on which the vehicle travels is based on the map information is a left turn lane
- it indicates that the change in the traveling direction of the vehicle is on the left side.
- it may mean the type of sign painted on the road in the captured image obtained by the imaging device 22.
- the type of sign painted on the road in the captured image is a sign indicating a left turn, it indicates that the change in the traveling direction of the host vehicle is on the left side.
- the vehicle locus estimation unit 11 estimates the locus of the host vehicle based on values periodically obtained from the yaw rate sensor 23, the steering angle sensor 24, and the vehicle speed sensor 25.
- the present disclosure is not limited thereto.
- the trajectory of the host vehicle may be estimated based on the history of the position information of the host vehicle obtained chronologically by the GPS device.
- the moving object trajectory estimation unit 12 is based on the value periodically obtained from the millimeter wave radar 21 and the value periodically obtained from the imaging device 22 (frame image data),
- the trajectory of the moving object has been estimated, the present disclosure is not limited thereto.
- the trajectory of a moving object may be estimated based on only values periodically obtained from the millimeter wave radar 21.
- the millimeter wave radar 21 corresponds to a subordinate concept of the first sensor in the means for solving the problem.
- the trajectory of the moving object may be estimated based on only values (frame image data) periodically obtained from the imaging device 22.
- the imaging device 22 corresponds to a subordinate concept of the first sensor in the means for solving the problem.
- step S145 when the change in the traveling direction of the host vehicle is a change in the direction away from the shield (step S145: YES), the recognized moving object is different from the moving object extraction region Similarly, the trajectory of a moving object has been estimated based on a frame image of a standard number of frames, but the present disclosure is not limited thereto. If the change in the traveling direction of the host vehicle is a change in the direction away from the shield, the trajectory of the moving object may be estimated based on frame images of a number of frames greater than the standard number of frames. When the change in the traveling direction of the host vehicle is a change in the direction away from the shield, the possibility of collision with a moving object is lower than in the case where the traveling direction of the host vehicle does not change. Therefore, in such a case, the trajectory of the moving object can be estimated more accurately by estimating the trajectory of the moving object based on the frame image of a larger number of frames.
- each sensor 21, 23-25 and imaging device 22 of a 1st embodiment detected a value regularly, if a value is obtained chronologically, even if it detects irregularly Good.
- a part of the configuration implemented by hardware may be replaced by software, and conversely, a part of the configuration implemented by software may be replaced by hardware
- the “computer-readable recording medium” is not limited to portable recording media such as flexible disks and CD-ROMs, but is fixed to internal storage devices in computers such as various RAMs and ROMs, and computers such as hard disks. Also includes an external storage device. That is, "computer-readable recording medium” has a broad meaning including any recording medium that can fix data packets, not temporarily.
- the present disclosure is not limited to the above-described embodiments, and can be implemented with various configurations without departing from the scope of the present disclosure.
- the technical features in the embodiments corresponding to the technical features in the modes described in the section of the summary of the invention can be used to solve some or all of the problems described above, or the effects of the effects described above. Replacements and combinations can be made as appropriate to achieve part or all. Also, if the technical features are not described as essential in the present specification, they can be deleted as appropriate.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
衝突推定装置(10)は、車両軌跡推定部(11)と、移動物軌跡推定部(12)と、遮蔽物特定部(13)と、移動物抽出領域設定部(14)と、方向変化情報取得部(15)と、衝突推定部(16)とを備える。衝突推定部は、移動物抽出領域内に移動物が認識され、且つ、方向変化情報の示す進行方向の変化が遮蔽物から離れる方向でない場合には、移動物抽出領域とは異なる領域において移動物が認識された場合に比べてより短い時間に第1センサから得られた情報に基づき推定される移動物の軌跡を利用して衝突発生の有無を推定し、進行方向の変化が前記遮蔽物から離れる方向である場合には、同じ時間又はより長い時間に第1センサから得られた情報に基づき推定される移動物の軌跡を利用して衝突発生の有無を推定する。
Description
本出願は、2017年6月29日に出願された日本出願番号2017-127189号に基づくもので、ここにその記載内容を援用する。
本開示は、車両と、車両とは異なる移動物との衝突の推定に関する。
自車両において、自車両とは異なる移動物、例えば、歩行者や自転車や他車両等との衝突を回避するため、移動物の移動軌跡を推定し、自車両と移動物との衝突可能性を推定する様々な手法が提案されている。このような衝突推定では、カメラやミリ波レーダを用いてより長い時間を掛けて移動物の位置を測定することにより、移動物の移動軌跡をより正確に推定でき、衝突可能性の推定精度を向上できる。しかし、移動物が駐車車両等の遮蔽物の陰から突然現れた場合には、衝突推定に長時間が掛かってしまうと警報の出力などの対応動作が遅れてしまうおそれがある。そこで、遮蔽物が存在する場合であって、遮蔽物近傍に移動物を検出した場合には、遮蔽物が無い状態で移動物を検出した場合に比べて、衝突推定に利用する条件を緩和する方法が提案されている。特許文献1には、遮蔽物である停車車両の近傍に設定された領域に歩行者を発見した場合に、衝突推定(衝突判定)に利用する基準条件を緩和することによってより短時間で衝突推定を行う方法が開示されている。また、基準条件の緩和として、例えば、移動物の軌跡を求める際に利用する画像数(フレーム数)を他の場合に比べて減らすこと等が開示されている。
特許文献1の方法では、自車両が舵を切っているために自車両の軌跡が移動物から離れる方向の軌跡であっても、所定の領域内に歩行者を認識した場合には、衝突推定に利用する基準条件が緩和されてしまう。しかし、この場合、衝突回避のための対応動作を実行するまでの時間的猶予が比較的多いにもかかわらず不必要に基準条件を緩和してしまい、衝突推定の精度をいたずらに低下させてしまう。そこで、衝突推定精度の低下を抑制しつつ状況に応じて衝突推定を早期に完了可能な技術が望まれている。
本開示は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態として実現することが可能である。
本開示の一形態によれば、車両に搭載され、前記車両とは異なる移動物と前記車両との衝突を推定する衝突推定装置が提供される。この衝突推定装置は、前記車両の軌跡を推定する車両軌跡推定部と;前記移動物を認識するために用いられる第1センサから時系列的に得られる情報に基づき、前記移動物の軌跡を推定する移動物軌跡推定部と;前記車両に対して前記車両の進行方向側に存在する遮蔽物の位置および大きさを特定する遮蔽物特定部と;特定された前記遮蔽物の位置および大きさを利用して、前記遮蔽物の位置および大きさを基準とした移動物抽出領域を設定する移動物抽出領域設定部と;前記車両の進行方向の変化を示す方向変化情報を取得する方向変化情報取得部と;推定された前記車両の軌跡と、推定された前記移動物の軌跡と、取得された前記方向変化情報と、を利用して、前記車両と前記移動物との衝突発生の有無を推定する衝突推定部と;を備え;前記衝突推定部は;前記移動物抽出領域内に前記移動物が認識され、且つ、取得された前記方向変化情報の示す前記進行方向の変化が前記遮蔽物から離れる方向でない場合には、前記移動物抽出領域とは異なる領域において前記移動物が認識された場合に比べて、より短い時間に前記第1センサから得られた情報に基づき推定される前記移動物の軌跡を利用して、前記衝突発生の有無を推定し;前記移動物抽出領域内に前記移動物が認識され、且つ、取得された前記方向変化情報の示す前記進行方向の変化が前記遮蔽物から離れる方向である場合には、前記移動物抽出領域とは異なる領域において前記移動物が認識された場合に比べて、同じ時間又はより長い時間に前記第1センサから得られた情報に基づき推定される前記移動物の軌跡を利用して、前記衝突発生の有無を推定する。
この形態の衝突推定装置によれば、移動物抽出領域内に移動物が認識され、且つ、取得された方向変化情報の示す進行方向の変化が遮蔽物から離れる方向でない場合には、移動物抽出領域とは異なる領域において移動物が認識された場合に比べて、より短い時間に第1センサから得られた情報に基づき推定される移動物の軌跡を利用して、衝突発生の有無を推定するので、「遮蔽物の陰から移動物が現れて車両の軌跡に向かって移動する」といった衝突回避のための対応動作を実行するまでの時間的猶予が比較的少ない状況であっても短時間で衝突推定を完了できる。また、移動物抽出領域内に移動物が認識され、且つ、取得された方向変化情報の示す進行方向の変化が遮蔽物から離れる方向である場合には、移動物抽出領域とは異なる領域において移動物が認識された場合に比べて、同じ時間又はより長い時間に第1センサから得られた情報に基づき推定される移動物の軌跡を利用して、衝突発生の有無を推定するので、車両が遮蔽物から離れて移動物との衝突の可能性が低い状況において、衝突推定精度の低下を抑制できる。このように、上記実施形態の衝突推定装置によれば、衝突推定精度の低下を抑制しつつ状況に応じて衝突推定を早期に完了できる。
本開示は、衝突推定装置以外の種々の形態で実現することも可能である。例えば、衝突推定方法、かかる方法を実現するためのコンピュータプログラム、かかるコンピュータプログラムを記憶した記憶媒体、衝突推定装置を搭載した車両等の形態で実現することができる。
本開示についての上記目的およびその他の目的、特徴や利点は、添付の図面を参照しながら下記の詳細な記述により、より明確になる。その図面は、
図1は、本開示の一実施形態としての衝突推定装置の構成を示すブロック図であり、
図2は、衝突推定処理の手順を示すフローチャートであり、
図3は、衝突推定処理の一例を示す説明図であり、
図4は、移動物抽出領域の設定例を示す説明図であり、
図5は、衝突推定処理の一例を示す説明図であり、
図6は、移動物抽出領域の設定例を示す説明図である。
A.第1実施形態:
A1.装置構成:
図1に示す第1実施形態の衝突推定装置10は、車両に搭載され、車両とは異なる移動物と車両との衝突を推定する。「車両とは異なる移動物」とは、本実施形態では、歩行者、自転車、バイク、無人車両など、移動可能な物体や生物を意味する。本実施形態では、衝突推定装置10が搭載された車両を「自車両」と呼ぶこともある。本実施形態において、衝突推定装置10は、マイコンやメモリを搭載したECU(Electronic Control Unit)により構成されている。
A1.装置構成:
図1に示す第1実施形態の衝突推定装置10は、車両に搭載され、車両とは異なる移動物と車両との衝突を推定する。「車両とは異なる移動物」とは、本実施形態では、歩行者、自転車、バイク、無人車両など、移動可能な物体や生物を意味する。本実施形態では、衝突推定装置10が搭載された車両を「自車両」と呼ぶこともある。本実施形態において、衝突推定装置10は、マイコンやメモリを搭載したECU(Electronic Control Unit)により構成されている。
衝突推定装置10は、車両に搭載された各種装置と電気的に接続されており、各種装置との間でデータのやり取りを行なう。具体的には、図1に示すように、衝突推定装置10は、ミリ波レーダ21、撮像装置22、ヨーレートセンサ23、操舵角センサ24、車速センサ25、ブレーキECU201、警報ECU202と、それぞれ電気的に接続されてデータのやり取りを行なう。
ミリ波レーダ21は、ミリ波帯の電波を用いて、自車両の進行方向側(車両が前進している場合には、前方)における物体の存否、かかる物体との自車両との距離、物体の位置、物体の大きさ、物体の形状および物体の自車両に対する相対速度を検出する。なお、ミリ波レーダ21が検出する「物体」とは、より正確には、複数の検出点(物標)の集合である。ミリ波レーダ21は、自車両のイグニッションがオンすると、ミリ波電波の照射およびその反射波の受信と、物体(物標)の検出を繰り返し実行する。撮像装置22は、集光するレンズおよび受光素子を備えた撮像カメラにより構成されており、自車両の進行方向側を撮像して撮像画像を得る。撮像装置22は、自車両のイグニッションがオンすると、撮像画像(フレーム画像)の取得を繰り返し実行する。例えば、1秒間に30フレームの画像を取得する。なお、撮像の際のフレームレートは、30フレーム毎秒に限らず、任意の値としてもよい。ヨーレートセンサ23は、自車両のヨーレート(回転角速度)を検出する。ヨーレートセンサ23は、自車両のイグニッションがオンすると、ヨーレートの検出を繰り返し実行する。操舵角センサ24は、自車両のステアリングホイール舵角を検出する。操舵角センサ24は、自車両のイグニッションがオンすると、操舵角の検出を繰り返し実行する。車速センサ25は、自車両の速度を検出する。車速センサ25は、自車両のイグニッションがオンすると、自車両の速度の検出を繰り返し実行する。
ブレーキECU201は、ブレーキ制御用のECUであり、衝突推定装置10およびブレーキ機構211と電気的に接続されている。ブレーキECU201は、ブレーキを掛けるタイミングおよびブレーキ量(制動量)の決定や、ブレーキ機構211の制御を行う。ブレーキ機構211は、ブレーキ制御に関わる、センサ、モータ、バルブ、ポンプ、各種アクチュエータ等からなる。警報ECU202は、警報出力用のECUであり、衝突推定装置10および警報機構212と電気的に接続されている。警報ECU202は、警報を出力するタイミングおよび出力内容の決定や、警報機構212の制御を行う。本実施形態において、警報とは、移動物との衝突を注意喚起する音声として出力される。したがって、本実施形態において、警報機構212は、スピーカおよびアンプ等の音声出力に関わる装置からなる。後述する衝突推定処理の結果、自車両と移動物との衝突発生が有ると推定された場合、ブレーキECU201および警報ECU202は、それぞれブレーキ機構211および警報機構212を制御して衝突回避のための対応動作を実行する。具体的には、自動ブレーキを掛け、また、警報を発する。
衝突推定装置10は、車両軌跡推定部11と、移動物軌跡推定部12と、遮蔽物特定部13と、移動物抽出領域設定部14と、方向変化情報取得部15と、衝突推定部16とを備えている。これらの各機能部11~16は、衝突推定装置10に予め記憶されている制御プログラムを衝突推定装置10のマイコンが実行することにより実現される。
車両軌跡推定部11は、ヨーレートセンサ23、操舵角センサ24、および車速センサ25から定期的に時系列的に得られる値に基づき、自車両の軌跡を推定する。具体的には、定期的に得られるヨーレート、操舵角、および車速を履歴として記憶しておき、所定期間の履歴に基づき、自車両の通過予定位置および通過予定時刻を、自車両の軌跡として推定する。
移動物軌跡推定部12は、ミリ波レーダ21から定期的に時系列的に得られる値、および撮像装置22から定期的に時系列的に得られる値(フレーム画像データ)に基づき、移動物の軌跡を推定する。具体的には、ミリ波レーダ21から得られる各物標の位置および距離と、撮像装置22から得られる画像データとを組み合わせて、移動物の種類、位置、大きさ、移動方向、移動速度を推定する。そして、移動物の通過予定位置および通過予定時刻を、移動物の軌跡として推定する。なお、移動物の種類は、例えば、フレーム画像内の形状に基づくパターンマッチングにより推定してもよい。
遮蔽物特定部13は、自車両に対して進行方向側に位置する遮蔽物の位置および大きさを特定する。本実施形態において、遮蔽物とは、移動物をミリ波レーダ21および撮像装置22から遮る可能性のある物体であり、例えば、停車または駐車中の車両、電柱、看板などの移動しない物体を意味する。前述の「移動しない」とは、停止している状況に加えて、低速で移動(前進または後退)する状態も含み得る。例えば、自車両の進行方向と同じ方向に時速20km未満で移動する車両も、移動しない物体であり、遮蔽物に該当する。なお、停止している状態のみが「移動しない」を意味してもよい。遮蔽物特定部13は、ミリ波レーダ21から定期的に時系列的に得られる値、および撮像装置22から定期的に時系列的に得られる値(フレーム画像データ)に基づき、遮蔽物の位置および大きさを特定する。
移動物抽出領域設定部14は、遮蔽物特定部13により特定された遮蔽物の位置および大きさを利用して、遮蔽物の位置および大きさを基準とした移動物抽出領域を設定する。移動物抽出領域とは、かかる領域において移動物を認識(抽出)した場合に、所定の条件下で、自車両との衝突推定をする際に用いる移動物の軌跡として、かかる領域とは異なる領域において移動物を認識した場合よりも短い時間に得られたミリ波レーダ21および撮像装置22の値に基づき推定された軌跡が利用されることとなる領域である。移動物抽出領域の詳細については、後述する。
方向変化情報取得部15は、自車両の進行方向の変化を示す方向変化情報を取得する。本実施形態では、方向変化情報とは、操舵角センサ24から得られるステアリングホイール舵角の変化を意味する。ステアリングホイール舵角が変化した場合、自車両の進行方向は変化する。
衝突推定部16は、車両軌跡推定部11により推定された自車両の軌跡と、移動物軌跡推定部12により推定された移動物の軌跡と、方向変化情報取得部15により得られた方向変化情報、すなわち、操舵角とを利用して、自車両と自動体との衝突発生の有無を推定する。
上記構成を有する衝突推定装置10は、後述の衝突推定処理を実行することにより、自車両と移動物との衝突推定精度の低下を抑制しつつ状況に応じて衝突推定を早期に完了できる。
上述のミリ波レーダ21および撮像装置22は、課題を解決するための手段における第1センサの下位概念に相当する。また、操舵角センサ24は、課題を解決するための手段における第2センサの下位概念に相当する。また、撮像装置22は、課題を解決するための手段における撮像部の下位概念に相当する。
A2.衝突推定処理:
図2に示す衝突推定処理は、自車両のイグニッションがオンすると、衝突推定装置10において実行される。遮蔽物特定部13は、自車両に対して進行方向側に位置する遮蔽物の位置および大きさを特定する(ステップS100)。
図2に示す衝突推定処理は、自車両のイグニッションがオンすると、衝突推定装置10において実行される。遮蔽物特定部13は、自車両に対して進行方向側に位置する遮蔽物の位置および大きさを特定する(ステップS100)。
例えば、図3のように、自車両である車両VL1が一方通行の2車線の道路における第2レーンLn2を走行している際に、進行方向D1の前方であって、隣の第1レーンLn1に停車中の車両VL2が存在する場合、遮蔽物特定部13は、かかる車両VL2を遮蔽物として特定し、その位置および大きさを特定する。
移動物抽出領域設定部14は、ステップS100で特定された遮蔽物の位置および大きさを基準とした移動物抽出領域を設定する(ステップS105)。図3の例では、移動物抽出領域Ar1が設定されている。
図4に示すように、移動物抽出領域Ar1は、遮蔽物である車両VL2の手前側端面S1における進行方向D1と直交する直交方向に沿った中央P1から、直交方向に沿って自車両の軌跡(図3に示す軌跡Tr0)に近づく側に予め定められた第1距離L1だけ離れた点P11までを一辺とし、上述の中央P1から進行方向D1に沿って車両VL2の後端P2から予め定められた第2距離L2だけ離れた点P3までを一辺とする平面視矩形状の領域として設定される。第1距離L1としては、例えば、1.5m(メートル)としてもよい。また、第2距離L2としては、例えば、5.0mとしてもよい。なお、第1距離L1および第2距離L2の値としては、これらの値に限定されず、任意の値に設定してもよい。なお、後端P2は、ミリ波レーダ21により得られた車両VL2の物標のうち、進行方向D1に沿って最も奥側の物標を基準に定められる端を意味する。したがって、後端P2として、車両VL2の実際の後端(進行方向D1に沿った最も奥の点)が設定されない場合もあり得る。
上述のように設定される移動物抽出領域Ar1は、車両VL2の近傍の領域であり、且つ、車両VL1から見て車両VL2によって遮られている領域(死角)から移動物が飛び出した場合に、衝突回避のための対応動作を実行するまでの時間的猶予が比較的少なくなるような領域である。図3および図4の例では、かかる移動物抽出領域Ar1に移動物としての人物m2が存在している。
図2に示すように、移動物軌跡推定部12は、進行方向側に移動物が有るか否かを判定する(ステップS110)。進行方向側に移動物が無いと判定された場合(ステップS110:NO)、上述のステップS100に戻る。
図2に示すように、進行方向側に移動物が有ると判定された場合(ステップS110:YES)、移動物軌跡推定部12は、移動物が移動物抽出領域内に存在するか否かを判定する(ステップS115)。図3の例では、移動物軌跡推定部12は、第1レーンLn1の横の歩道において移動物としての人物m1を認識し、また、移動物抽出領域Ar1内において移動物としての人物m2を認識する。したがって、ステップS110では、進行方向D1側に複数の移動物(2人の人物m1、m2)が有ると判定される。このような場合、移動物ごとにステップS115以下の処理が実行される。移動物である人物m1については、移動物抽出領域Ar1内に存在していない。この場合、移動物が移動物抽出領域内に存在しないと判定され(ステップS115:NO)、車両軌跡推定部11は、自車両の軌跡を推定する(ステップS120)。図3の例では、自車両の軌跡Tr0として、自車両が現在走行中の第2レーンLn2を直進する軌跡が推定されている。
ステップS120の実行後、移動物軌跡推定部12は、標準フレーム数の画像データと、かかるフレーム数の画像データが得られた期間に応じた期間に得られるミリ波レーダ21の測定結果とに基づき、移動物の軌跡を推定する(ステップS125)。本実施形態において、標準フレーム数は、5フレームである。なお、5フレームに限らず、任意のフレーム数としてもよい。図3の例では、移動物としての人物m1の軌跡Tr1が推定されている。
ステップS125の実行後、衝突推定部16は、ステップS120で推定された自車両の軌跡と、ステップS125で推定された移動物の軌跡とに基づき、自車両と移動物との衝突発生の有無を推定する(ステップS130)。図3の例では、車両VL1の軌跡Tr0と、移動物である人物m1の軌跡Tr1とは交差していない。したがって、人物m1については、「衝突発生は無し」と判定される。ステップS130の実行後、上述のステップS100に戻る。
上述のステップS115において、人物m2については、移動物抽出領域Ar1内に存在するため、「移動物が移動物抽出領域内に存在する」と判定される(ステップS115:YES)。この場合、車両軌跡推定部11は、自車両の軌跡を推定する(ステップS135)。このステップS135は、上述のステップS120と同じであるので、詳細な説明を省略する。なお、他の移動物を対象とする処理(例えば、ステップS120)おいて既に自車両の軌跡を推定していれば、その推定結果を利用して、ステップS135を省略してもよい。同様に、上述のステップS120についても、他の移動物を対象とする処理(例えば、ステップS135)において既に自車両の軌跡を推定していれば、その推定結果を利用して、ステップS120を省略してもよい。
ステップS135の実行後、方向変化情報取得部15は、方向変化情報を取得する(ステップS140)。なお、図3の例では、ステアリングホイール舵角の変化無し、すなわち、「自車両の進行方向の変化は無し」との情報が得られている。
方向変化情報取得部15は、ステップS140で得られた方向変化情報に基づき、自車両の進行方向の変化が、遮蔽物から離れる方向の変化であるか否かを判定する(ステップS145)。図3の例のように、操舵角の変化が無いと判定された場合、遮蔽物から離れる方向の変化ではないと判定される(ステップS145:NO)。この場合、移動物軌跡推定部12は、低減フレーム数の画像データと、かかるフレーム数の画像データが得られた期間に応じた期間に得られるミリ波レーダ21の測定結果とに基づき、移動物の軌跡を推定する(ステップS150)。低減フレーム数とは、上述のステップS125における「標準フレーム数」よりも少ないフレーム数を意味し、本実施形態では、「3フレーム」である。なお、3フレームに限らず、標準フレーム数よりも少ない任意のフレーム数としてもよい。ステップS150では、上述のステップS125とは異なり、低減フレーム数の画像データ、およびかかるフレーム数の画像データが得られた期間に応じた期間に得られるミリ波レーダ21の測定結果とに基づき、移動物の軌跡が推定されるので、ステップS125に比べて、移動物の軌跡の推定に要する時間は短い。
ステップS150の実行後、上述のステップS130が実行される。図3の例では、車両VL1の軌跡Tr0と人物m2の軌跡Tr2とが交差しており、交差する点に車両VL1と人物m2とが同じ時刻に達した場合、「衝突発生有り」と判定されることとなる。なお、ステップS130の結果、「衝突発生有り」と判定された場合、衝突推定装置10からブレーキECU201と警報ECU202に「衝突発生有り」と、衝突位置に関する情報とが通知され、かかる情報に基づき、上述した衝突回避のための対応動作が実行される。
上述のステップS145において、自車両の進行方向の変化が、遮蔽物から離れる方向の変化であると判定された場合(ステップS145:YES)、上述のステップS125が実行される。すなわち、標準フレーム数の画像データと、かかるフレーム数の画像データが得られた期間に応じた期間に得られるミリ波レーダ21の測定結果とに基づき、移動物の軌跡が推定される。
図5の例では、自車両VL1は、第2レーンLn2を直進中であるが、第2レーンLn2側の歩道を越えた位置にある駐車場PKに入るために舵を右へと切り始めた状態である。この場合、ステップS140において、自車両の進行方向の変化として、右へ旋回する方向の変化ΔDを示す情報が取得される。このため、方向変化情報取得部15は、ステップS145において、車両VL1の進行方向の変化は、遮蔽物である車両VL2から離れる方向であると判定する(ステップS145:YES)。この場合、上述のように、標準フレーム数の画像データと、かかるフレーム数の画像データが得られた期間に応じた期間に得られるミリ波レーダ21の測定結果とに基づき、移動物の軌跡が推定される。図5の例では、車両VL1の軌跡として推定された軌跡Tr0は第2レーンLn2を直進する軌跡であるが、進行方向が右へ旋回する方向の変化、すなわち、遮蔽物である車両VL2から離れる方向の変化であるため、人物m2と衝突する可能性は低くなる。換言すると、図5の例では、衝突回避のための対応動作の実行に時間的余裕は比較的多い。そこで、衝突推定装置10では、このような場合には、標準フレーム数のフレーム画像データを用いることにより、移動物の軌跡の推定精度を向上させるようにしている。
以上説明した第1実施形態の衝突推定装置10によれば、移動物抽出領域Ar1内に移動物(人物m2)が認識され、且つ、取得された方向変化情報の示す進行方向の変化が遮蔽物(車両VL2)から離れる方向でない場合には、移動物抽出領域Ar1とは異なる領域において移動物(人物m1)が認識された場合に比べて、より短い時間に第1センサ(ミリ波レーダ21および撮像装置22)から得られた情報に基づき推定される移動物(人物m2)の軌跡Tr2を利用して、衝突発生の有無を推定するので、「遮蔽物(車両VL2)の陰から移動物(人物m2)が現れて車両の軌跡Tr0に向かって移動する」といった衝突回避のための対応動作を実行するまでの時間的猶予が比較的少ない状況であっても短時間で衝突推定を完了できる。また、移動物抽出領域Ar1内に移動物(人物m2)が認識され、且つ、取得された方向変化情報の示す進行方向の変化ΔDが遮蔽物(車両VL2)から離れる方向である場合には、移動物抽出領域Ar1とは異なる領域において移動物(人物m1)が認識された場合に比べて、同じ時間に第1センサ(ミリ波レーダ21および撮像装置22)から得られた情報に基づき推定される移動物(人物m2)の軌跡を利用して、衝突発生の有無を推定するので、車両VL1が遮蔽物から離れて移動物(人物m2)との衝突の可能性が低減すると推定される場合に、衝突推定精度の低下を抑制できる。このように、第1実施形態の衝突推定装置10によれば、衝突推定精度の低下を抑制しつつ状況に応じて衝突推定を早期に完了できる。
また、遮蔽物(車両VL2)の手前側端面S1における進行方向D1と直交する直交方向に沿った中央P1から、直交方向に沿って車両VL1の軌跡Tr0に近づく側に予め定められた第1距離L1だけ離れた点P11までを一辺とし、中央P1から、進行方向D1に沿って遮蔽物(車両VL2)の後端P2から予め定められた第2距離L2だけ離れた点P3までを一辺とする平面視矩形状の領域を、移動物抽出領域Ar1として設定するので、移動物(人物m2)が車両VL1の軌跡Tr0に向かう方向に移動した場合に衝突回避のための対応動作を実行するまでの時間的猶予が比較的少なくなる状況となるような領域を、精度良く設定できる。このため、不用意に衝突推定精度を低下させることを抑制できる。
また、方向変化情報取得部15は、操舵角センサ24から得られる値、すなわち、自車両のステアリングホイール舵角に基づき方向変化情報を取得するので、車両VL1の進行方向D1の変化が遮蔽物(車両VL2)から離れる方向であるか否かを精度良く特定できる。
B.その他の実施形態:
(B-1)上記第1実施形態では、移動物抽出領域Ar1は、1つの遮蔽物である車両VL2の位置および大きさを基準として設定されていたが、本開示はこれに限定されない。複数の遮蔽物の位置および大きさを基準として移動物抽出領域が設定されてもよい。具体的には、例えば、図6のように、遮蔽物として、上述の車両VL2と共に、車両VL2に対して進行方向D1側に距離ΔLだけ離れて並んで停車している車両VL3が認識された場合には、以下のように、移動物抽出領域Ar2を設定してもよい。すなわち、複数の遮蔽物(2台の車両VL2、VL3)のうちの最も手前の遮蔽物(車両VL2)の手前側端面S1における進行方向D1と直交する直交方向に沿った中央P1から、直交方向に沿って車両VL1の軌跡Tr0に近づく側に予め定められた第3距離L3だけ離れた点P21までを一辺とし、中央P1から、複数の遮蔽物(2台の車両VL2、VL3)のうちの最も奥の遮蔽物(車両VL3)の後端P12から進行方向D1に沿って予め定められた第4距離L4だけ離れた点P13までを一辺とする矩形状の領域を、移動物抽出領域Ar2として設定してもよい。なお、第3距離L3としては、例えば、上述の第1距離L1と同様に1.5mとしてもよい。また、第4距離L4としては、例えば、上述の第2距離L2と同様に5.0mとしてもよい。第3距離L3および第4距離L4の値としては、これらの値に限定されず、任意の値に設定してもよい。
(B-1)上記第1実施形態では、移動物抽出領域Ar1は、1つの遮蔽物である車両VL2の位置および大きさを基準として設定されていたが、本開示はこれに限定されない。複数の遮蔽物の位置および大きさを基準として移動物抽出領域が設定されてもよい。具体的には、例えば、図6のように、遮蔽物として、上述の車両VL2と共に、車両VL2に対して進行方向D1側に距離ΔLだけ離れて並んで停車している車両VL3が認識された場合には、以下のように、移動物抽出領域Ar2を設定してもよい。すなわち、複数の遮蔽物(2台の車両VL2、VL3)のうちの最も手前の遮蔽物(車両VL2)の手前側端面S1における進行方向D1と直交する直交方向に沿った中央P1から、直交方向に沿って車両VL1の軌跡Tr0に近づく側に予め定められた第3距離L3だけ離れた点P21までを一辺とし、中央P1から、複数の遮蔽物(2台の車両VL2、VL3)のうちの最も奥の遮蔽物(車両VL3)の後端P12から進行方向D1に沿って予め定められた第4距離L4だけ離れた点P13までを一辺とする矩形状の領域を、移動物抽出領域Ar2として設定してもよい。なお、第3距離L3としては、例えば、上述の第1距離L1と同様に1.5mとしてもよい。また、第4距離L4としては、例えば、上述の第2距離L2と同様に5.0mとしてもよい。第3距離L3および第4距離L4の値としては、これらの値に限定されず、任意の値に設定してもよい。
(B-2)本開示における移動物抽出領域の位置および形状は、上述の第1実施形態の移動物抽出領域Ar1の位置および形状に限定されない。例えば、遮蔽物の手前側端面(端面S1)において自車両(車両VL1)の軌跡Tr0に最も近い側の端点を頂点とし、且つ、進行方向D1と平行な辺を有する矩形上の領域を、移動物抽出領域としてもよい。また、遮蔽物の手前側端面において自車両(車両VL1)の軌跡Tr0に最も近い側の端点から進行方向D1と直交する方向に所定距離だけ離れた点を頂点とし、且つ、進行方向D1と平行な辺を有する矩形上の領域を、移動物抽出領域としてもよい。また、例えば、遮蔽物の手前側端面における進行方向D1と直交する直交方向に沿った中央を通る進行方向D1と平行な仮想線と、自車両(車両VL1)の軌跡Tr0に近い側の遮蔽物の側面の進行方向D1に沿った中央を通る進行方向D1と直交する仮想線との交点を中心とした所定の半径を有する円形の領域を、移動物抽出領域としてもよい。これらの例の移動物抽出領域は、いずれも遮蔽物の位置および大きさを利用して設定することができる。すなわち、一般には、遮蔽物の位置および大きさを利用して設定され、遮蔽物の位置および大きさを基準とした領域を、移動物抽出領域として設定してもよい。
(B-3)第1実施形態では、方向変化情報とは、操舵角センサ24から得られるステアリングホイール舵角の変化を意味していたが、本開示はこれに限定されない。例えば、自車両が搭載する図示しないタイヤ舵角センサから得られるタイヤ舵角の変化を意味してもよい。また、例えば、ヨーレートセンサ23から得られるヨーレートの変化を意味してもよい。また、例えば、自車両が搭載する方向指示装置(ウィンカ)の動作状態を示す情報を意味してもよい。方向指示装置の動作状態が右折を示す動作状態の場合には、方向変化情報は、自車両の進行方向の変化が右側であることを示す。これとは逆に、方向指示装置の動作状態が左折を示す動作状態の場合には、方向変化情報は、自車両の進行方向の変化が左側であることを示す。また、例えば、車両が図示しないナビゲーション装置用に地図情報を備える構成においては、かかる地図情報に基づき自車両の走行する道路の種類を特定して得られた情報を意味してもよい。具体的には、例えば、地図情報に基づき自車両の走行する道路の種類が、左折専用レーンである場合には、自車両の進行方向の変化が左側であることを示す。また、例えば、撮像装置22により得られた撮像画像における道路にペイントされた標識の種類を意味してもよい。具体的には、例えば、撮像画像における道路にペイントされた標識の種類が、左折を示す標識である場合には、自車両の進行方向の変化が左側であることを示す。
(B-4)第1実施形態において、車両軌跡推定部11は、ヨーレートセンサ23、操舵角センサ24、および車速センサ25から定期的に得られる値に基づき自車両の軌跡を推定していたが、本開示はこれに限定されない。例えば、自車両がGPS装置を搭載する構成においては、かかるGPS装置により時系列的に得られる自車両の位置情報の履歴に基づき、自車両の軌跡を推定してもよい。
(B-5)第1実施形態において、移動物軌跡推定部12は、ミリ波レーダ21から定期的に得られる値、および撮像装置22から定期的に得られる値(フレーム画像データ)に基づき、移動物の軌跡を推定していたが、本開示はこれに限定されない。例えば、ミリ波レーダ21から定期的に得られる値のみに基づき、移動物の軌跡を推定してもよい。かかる構成においては、ミリ波レーダ21が課題を解決するための手段における第1センサの下位概念に相当する。また、例えば、撮像装置22から定期的に得られる値(フレーム画像データ)のみに基づき、移動物の軌跡を推定してもよい。かかる構成においては、撮像装置22が課題を解決するための手段における第1センサの下位概念に相当する。
(B-6)第1実施形態では、自車両の進行方向の変化が遮蔽物から離れる方向の変化である場合(ステップS145:YES)、認識された移動物が移動物抽出領域とは異なる領域に存在すると同様に、標準フレーム数のフレーム画像に基づき移動物の軌跡が推定されていたが、本開示はこれに限定されない。自車両の進行方向の変化が遮蔽物から離れる方向の変化である場合、標準フレーム数よりも多いフレーム数のフレーム画像に基づき移動物の軌跡が推定されてもよい。自車両の進行方向の変化が遮蔽物から離れる方向の変化である場合、自車両の進行方向が変化しない場合に比べて移動物と衝突する可能性が低くなる。そこで、このような場合に、より多くのフレーム数のフレーム画像に基づき移動物の軌跡を推定することにより、移動物の軌跡をより精度良く推定できる。
(B-7)第1実施形態の各センサ21、23~25および撮像装置22は、定期的に値を検出していたが、時系列的に値が得られれば不定期に検出してもよい。
(B-7)各実施形態において、ハードウェアによって実現されていた構成の一部をソフトウェアに置き換えるようにしてもよく、逆に、ソフトウェアによって実現されていた構成の一部をハードウェアに置き換えるようにしてもよい。例えば、車両軌跡推定部11、移動物軌跡推定部12、遮蔽物特定部13、移動物抽出領域設定部14、方向変化情報取得部15、衝突推定部16のうちの少なくとも1つの機能部を、集積回路、ディスクリート回路、またはそれらの回路を組み合わせたモジュールにより実現してもよい。また、本開示の機能の一部または全部がソフトウェアで実現される場合には、そのソフトウェア(コンピュータプログラム)は、コンピューター読み取り可能な記録媒体に格納された形で提供することができる。「コンピューター読み取り可能な記録媒体」とは、フレキシブルディスクやCD-ROMのような携帯型の記録媒体に限らず、各種のRAMやROM等のコンピューター内の内部記憶装置や、ハードディスク等のコンピューターに固定されている外部記憶装置も含んでいる。すなわち、「コンピューター読み取り可能な記録媒体」とは、データパケットを一時的ではなく固定可能な任意の記録媒体を含む広い意味を有している。
本開示は、上述の各実施形態に限られるものではなく、その趣旨を逸脱しない範囲において種々の構成で実現することができる。例えば、発明の概要の欄に記載した各形態中の技術的特徴に対応する各実施形態中の技術的特徴は、上述の課題の一部又は全部を解決するために、あるいは、上述の効果の一部又は全部を達成するために、適宜、差し替えや、組み合わせを行うことが可能である。また、その技術的特徴が本明細書中に必須なものとして説明されていなければ、適宜、削除することが可能である。
Claims (8)
- 車両(VL1)に搭載され、前記車両とは異なる移動物(m1、m2)と前記車両との衝突を推定する衝突推定装置(10)であって、
前記車両の軌跡を推定する車両軌跡推定部(11)と、
前記移動物を認識するために用いられる第1センサ(21、22)から時系列的に得られる情報に基づき、前記移動物の軌跡を推定する移動物軌跡推定部(12)と、
前記車両に対して前記車両の進行方向(D1)側に存在する遮蔽物(VL2)の位置および大きさを特定する遮蔽物特定部(13)と、
特定された前記遮蔽物の位置および大きさを利用して、前記遮蔽物の位置および大きさを基準とした移動物抽出領域(Ar1)を設定する移動物抽出領域設定部(14)と、
前記車両の進行方向の変化を示す方向変化情報を取得する方向変化情報取得部(15)と、
推定された前記車両の軌跡と、推定された前記移動物の軌跡と、取得された前記方向変化情報と、を利用して、前記車両と前記移動物との衝突発生の有無を推定する衝突推定部(16)と、
を備え、
前記衝突推定部は、
前記移動物抽出領域内に前記移動物が認識され、且つ、取得された前記方向変化情報の示す前記進行方向の変化が前記遮蔽物から離れる方向でない場合には、前記移動物抽出領域とは異なる領域において前記移動物が認識された場合に比べて、より短い時間に前記第1センサから得られた情報に基づき推定される前記移動物の軌跡を利用して、前記衝突発生の有無を推定し、
前記移動物抽出領域内に前記移動物が認識され、且つ、取得された前記方向変化情報の示す前記進行方向の変化が前記遮蔽物から離れる方向である場合には、前記移動物抽出領域とは異なる領域において前記移動物が認識された場合に比べて、同じ時間又はより長い時間に前記第1センサから得られた情報に基づき推定される前記移動物の軌跡を利用して、前記衝突発生の有無を推定する、
衝突推定装置。 - 請求項1に記載の衝突推定装置において、
前記移動物抽出領域設定部は、前記遮蔽物の手前側端面における前記進行方向と直交する直交方向に沿った中央(P1)から、前記直交方向に沿って前記車両の軌跡(Tr0)に近づく側に予め定められた第1距離(L1)だけ離れた点までを一辺とし、前記中央から、前記進行方向に沿って前記遮蔽物の後端(P2)から予め定められた第2距離(L2)だけ離れた点までを一辺とする平面視矩形状の領域を、前記移動物抽出領域として設定する、
衝突推定装置。 - 請求項1または請求項2に記載の衝突推定装置において、
前記移動物抽出領域設定部は、前記遮蔽物の位置および大きさとして、前記進行方向に沿って並んだ複数の遮蔽物(VL2、VL3)の位置および大きさがそれぞれ特定された場合に、前記複数の遮蔽物のうちの最も手前の遮蔽物(VL2)の手前側端面(S1)における前記進行方向と直交する直交方向に沿った中央(P1)から、前記直交方向に沿って前記車両の軌跡に近づく側に予め定められた第3距離(L3)だけ離れた点までを一辺とし、前記中央から、前記複数の遮蔽物のうちの最も奥の遮蔽物(VL3)の後端(S12)から前記進行方向に沿って予め定められた第4距離(L4)だけ離れた点までを一辺とする矩形状の領域を、前記移動物抽出領域として設定する、
衝突推定装置。 - 請求項1から請求項3までのいずれか一項に記載の衝突推定装置において、
前記車両は、ステアリングホイール舵角と、タイヤ舵角と、ヨーレートと、のうち少なくとも一つを検出する第2センサ(23、24)を備え、
前記方向変化情報取得部は、前記第2センサから得られる値に基づき、前記方向変化情報を取得する、
衝突推定装置。 - 請求項1から請求項4までのいずれか一項に記載の衝突推定装置において、
前記方向変化情報取得部は、前記車両に搭載されている方向指示装置の動作状態を示す情報を取得し、取得された該情報に基づき前記方向変化情報を取得する、
衝突推定装置。 - 請求項1から請求項5までのいずれか一項に記載の衝突推定装置において、
前記車両は、地図情報を備え、
前記方向変化情報取得部は、前記地図情報に基づき前記車両の走行する道路の種類を特定し、特定された前記道路の種類に基づき前記方向変化情報を取得する、
衝突推定装置。 - 請求項1から請求項6までのいずれか一項に記載の衝突推定装置において、
前記車両は、撮像部を備え、
前記方向変化情報取得部は、前記車両に搭載されている撮像部により得られた撮像画像における道路にペイントされた標識の種類に基づき前記方向変化情報を取得する、
衝突推定装置。 - 車両において、前記車両とは異なる移動物と前記車両との衝突を推定する衝突推定方法であって、
前記車両の軌跡を推定する工程と、
前記移動物を認識するために用いられる第1センサから時系列的に得られる情報に基づき、前記移動物の軌跡を推定する工程と、
前記車両に対して前記車両の進行方向側に存在する遮蔽物の位置および大きさを特定する工程と、
特定された前記遮蔽物の位置および大きさを利用して、前記遮蔽物の位置および大きさを基準とした移動物抽出領域を設定する工程と、
前記車両の進行方向の変化を示す方向変化情報を取得する工程と、
推定された前記車両の軌跡と、推定された前記移動物の軌跡と、取得された前記方向変化情報と、を利用して、前記車両と前記移動物との衝突発生の有無を推定する工程と、
を備え、
前記衝突発生の有無を推定する工程は、
前記移動物抽出領域内に前記移動物が認識され、且つ、取得された前記方向変化情報の示す前記進行方向の変化が前記遮蔽物から離れる方向でない場合には、前記移動物抽出領域とは異なる領域において前記移動物が認識された場合に比べて、より短い時間に前記第1センサから得られた情報に基づき推定される前記移動物の軌跡を利用して、前記衝突発生の有無を推定し、
前記移動物抽出領域内に前記移動物が認識され、且つ、取得された前記方向変化情報の示す前記進行方向の変化が前記遮蔽物から離れる方向である場合には、前記移動物抽出領域とは異なる領域において前記移動物が認識された場合に比べて、同じ時間又はより長い時間に前記第1センサから得られた情報に基づき推定される前記移動物の軌跡を利用して、前記衝突発生の有無を推定する工程を含む、
衝突推定方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017-127189 | 2017-06-29 | ||
| JP2017127189A JP6690604B2 (ja) | 2017-06-29 | 2017-06-29 | 衝突推定装置および衝突推定方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019003602A1 true WO2019003602A1 (ja) | 2019-01-03 |
Family
ID=64742878
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/016245 WO2019003602A1 (ja) | 2017-06-29 | 2018-04-20 | 衝突推定装置および衝突推定方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6690604B2 (ja) |
| WO (1) | WO2019003602A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113140194A (zh) * | 2020-01-17 | 2021-07-20 | 北京小米移动软件有限公司 | 亮度调节方法、装置及存储介质 |
| CN113147747A (zh) * | 2020-01-06 | 2021-07-23 | 株式会社万都 | 用于辅助车辆驾驶的设备及其方法 |
| CN113859251A (zh) * | 2021-10-29 | 2021-12-31 | 广州文远知行科技有限公司 | 涉及行驶盲区的车速规划方法、驾驶控制方法及相关设备 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004310315A (ja) * | 2003-04-04 | 2004-11-04 | Nissan Motor Co Ltd | 情報提供装置、情報提供システムおよび情報提供用プログラム |
| JP2007083817A (ja) * | 2005-09-21 | 2007-04-05 | Honda Motor Co Ltd | 運転支援装置 |
| JP2014213776A (ja) * | 2013-04-26 | 2014-11-17 | 株式会社デンソー | 衝突判定装置、および衝突緩和装置 |
| WO2016159297A1 (ja) * | 2015-03-31 | 2016-10-06 | 株式会社デンソー | 安全装置作動タイミング制御方法および装置 |
| JP2016192165A (ja) * | 2015-03-31 | 2016-11-10 | 株式会社デンソー | 運転支援装置、及び運転支援方法 |
-
2017
- 2017-06-29 JP JP2017127189A patent/JP6690604B2/ja active Active
-
2018
- 2018-04-20 WO PCT/JP2018/016245 patent/WO2019003602A1/ja active Application Filing
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004310315A (ja) * | 2003-04-04 | 2004-11-04 | Nissan Motor Co Ltd | 情報提供装置、情報提供システムおよび情報提供用プログラム |
| JP2007083817A (ja) * | 2005-09-21 | 2007-04-05 | Honda Motor Co Ltd | 運転支援装置 |
| JP2014213776A (ja) * | 2013-04-26 | 2014-11-17 | 株式会社デンソー | 衝突判定装置、および衝突緩和装置 |
| WO2016159297A1 (ja) * | 2015-03-31 | 2016-10-06 | 株式会社デンソー | 安全装置作動タイミング制御方法および装置 |
| JP2016192165A (ja) * | 2015-03-31 | 2016-11-10 | 株式会社デンソー | 運転支援装置、及び運転支援方法 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113147747A (zh) * | 2020-01-06 | 2021-07-23 | 株式会社万都 | 用于辅助车辆驾驶的设备及其方法 |
| CN113147747B (zh) * | 2020-01-06 | 2024-05-31 | 汉拿科锐动电子股份公司 | 用于辅助车辆驾驶的设备及其方法 |
| CN113140194A (zh) * | 2020-01-17 | 2021-07-20 | 北京小米移动软件有限公司 | 亮度调节方法、装置及存储介质 |
| CN113140194B (zh) * | 2020-01-17 | 2023-08-29 | 北京小米移动软件有限公司 | 亮度调节方法、装置及存储介质 |
| CN113859251A (zh) * | 2021-10-29 | 2021-12-31 | 广州文远知行科技有限公司 | 涉及行驶盲区的车速规划方法、驾驶控制方法及相关设备 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6690604B2 (ja) | 2020-04-28 |
| JP2019010911A (ja) | 2019-01-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6747389B2 (ja) | 衝突推定装置および衝突推定方法 | |
| CN109891262B (zh) | 物体探测装置 | |
| US10832578B2 (en) | System and method for collision prevention | |
| JP7119428B2 (ja) | 運転支援装置 | |
| US20190202450A1 (en) | Apparatus and system for controlling travel of vehicle | |
| JP6828428B2 (ja) | 車両用衝突回避支援装置および車両の衝突回避支援方法 | |
| EP3608635A1 (en) | Positioning system | |
| JP6190758B2 (ja) | 物体認識装置及び車両 | |
| JP4684954B2 (ja) | 車両の走行安全装置 | |
| US11333766B2 (en) | Method for assisting a driver of a vehicle/trailer combination in maneuvering with the vehicle/trailer combination, blind spot system as well as vehicle/trailer combination | |
| WO2017014080A1 (ja) | 運転支援システム | |
| US10871565B2 (en) | Object detection apparatus and object detection method | |
| US10569769B2 (en) | Vehicle control device | |
| WO2016194851A1 (ja) | 物体検出装置および物体検出方法 | |
| US10906559B1 (en) | Apparatus for assisting driving of a vehicle and method thereof | |
| US10255814B2 (en) | Driving assistance apparatus | |
| JP5785578B2 (ja) | 車両周辺監視装置 | |
| US20160090085A1 (en) | Drive Assist Apparatus of Vehicle and Onboard Computer | |
| JP2017010498A (ja) | 車両制御装置 | |
| WO2019003602A1 (ja) | 衝突推定装置および衝突推定方法 | |
| US7057502B2 (en) | Vehicle drive assist apparatus | |
| JP2019010911A5 (ja) | ||
| KR20190046551A (ko) | 차량 주행제어 장치 및 방법 | |
| CN110065492B (zh) | 车辆控制系统 | |
| US11444921B2 (en) | Vehicular firewall providing device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18824012 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 18824012 Country of ref document: EP Kind code of ref document: A1 |