WO2018174261A1 - ハンマアセンブリおよび鍵盤装置 - Google Patents
ハンマアセンブリおよび鍵盤装置 Download PDFInfo
- Publication number
- WO2018174261A1 WO2018174261A1 PCT/JP2018/011833 JP2018011833W WO2018174261A1 WO 2018174261 A1 WO2018174261 A1 WO 2018174261A1 JP 2018011833 W JP2018011833 W JP 2018011833W WO 2018174261 A1 WO2018174261 A1 WO 2018174261A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- key
- center
- hammer
- gravity
- assembly
- Prior art date
Links
Images
















Definitions
- This disclosure relates to a hammer assembly.
- a predetermined feeling (hereinafter referred to as touch feeling) is given to a player's finger through a key by the action of an action mechanism.
- touch feeling a predetermined feeling
- an acoustic piano Even when a key is pressed in an electronic keyboard device such as an electronic piano.
- a weight is provided on a structure that rotates with key depression (for example, Patent Document 1).
- weights having different weights on the high-pitched sound side and the low-pitched sound side are used in order to approximate the touch feeling of the acoustic piano.
- Such a structure is generally expressed as a hammer corresponding to a similar configuration in an acoustic piano, but since there is no string in an electronic keyboard device, it has a function of hitting a string. I don't have it.
- the mechanism for rotating the weight part of the hammer assembly is different from the mechanism for rotating the hammer by the acoustic piano. For this reason, there are various methods for making the acoustic piano touch closer to the touch feeling of the acoustic piano and improving the durability depending on the mechanism, but it is desirable to realize it by the simplest possible method. As one of such methods, for example, it is conceivable to control the position of the center of gravity of the hammer assembly.
- One of the purposes of the present disclosure is to easily control the position of the center of gravity of the hammer assembly.
- a hammer assembly includes a hammer body portion that rotates about a rotation axis, a weight portion that includes a connection surface facing a partial region of the hammer body portion, and an exposed surface opposite to the connection surface. And the center of gravity of the weight portion when viewed in a direction perpendicular to the rotation axis is a position where the distance from the center of gravity to the connection surface is different from the distance from the center of gravity to the exposed surface. .
- a hammer assembly includes a hammer main body that rotates about a rotation axis, a connection surface that faces a partial region of the hammer main body, and a connection surface opposite to the connection surface.
- the weight portion may include a plate-like portion where the connection surface and the exposed surface face each other.
- the weight portion may be attached to the hammer body portion by an attachment member.
- the weight portion corresponds to a region between the connection surface and the exposed surface that extends outward from the connection surface and the exposed surface. May be included.
- the top portion of the region extending outward may be at a position different from the center of the connection surface and the exposed surface.
- the hammer main body may include a force point to which a force from a key is transmitted, and an assembly center plane passing through the force point and perpendicular to the rotation shaft may be at a position different from the center of gravity of the weight portion.
- the hammer main body part includes a force point to which a force from a key is transmitted, an assembly center plane passing through the force point and perpendicular to the rotating shaft, and a sum of a plurality of the weight parts.
- the position may be different from the center of gravity.
- a keyboard device includes a plurality of keys arranged to be rotatable with respect to a frame, and a plurality of hammer assemblies as the above-described hammer assemblies arranged corresponding to the plurality of keys, respectively.
- the position of the rotating shaft of the hammer body is fixed with respect to the frame, and the hammer assembly corresponding to the key rotates about the rotating shaft according to the rotation of the key. To do.
- the plurality of keys include a first key and a second key
- the hammer main body includes a force point to which a force from the key is transmitted, passes through the force point, and is perpendicular to the rotating shaft.
- the position of the center of gravity of the weight portion with respect to the surface may be different between the case of the first key and the case of the second key.
- the position of the center of gravity of the hammer assembly corresponding to the first key is closer to the second key than the assembly center plane corresponding to the first key, and the position corresponding to the second key.
- the position of the center of gravity of the hammer assembly may be closer to the first key than the center surface of the assembly corresponding to the second key.
- the position of the center of gravity of the hammer assembly can be easily controlled.
- FIG. 1 is a diagram illustrating a configuration of a keyboard device according to the first embodiment.
- the keyboard device 1 is an electronic keyboard instrument that emits sound in response to a user (player) key depression such as an electronic piano.
- the keyboard device 1 may be a keyboard-type controller that outputs control data (for example, MIDI) for controlling an external sound source device in response to a key depression.
- the keyboard device 1 may not have a sound source device.
- the keyboard device 1 includes a keyboard assembly 10.
- the keyboard assembly 10 includes a white key 100w and a black key 100b.
- a plurality of white keys 100w and black keys 100b are arranged side by side.
- the number of keys 100 is N, which is 88 in this example, but is not limited to this number.
- the direction in which the keys 100 are arranged is called the scale direction.
- the key 100 may be referred to.
- w is added to the end of the reference sign, it means that the configuration corresponds to the white key.
- “b” is added at the end of the code, it means that the configuration corresponds to the black key.
- a part of the keyboard assembly 10 exists inside the housing 90.
- a portion of the keyboard assembly 10 covered by the casing 90 is referred to as a non-appearance portion NV, and a portion exposed from the casing 90 and visible to the user is referred to as an appearance portion PV.
- the appearance part PV is a part of the key 100 and indicates an area where the user can perform a performance operation.
- a portion of the key 100 that is exposed by the appearance portion PV may be referred to as a key body portion.
- a sound source device 70 and a speaker 80 are arranged inside the housing 90.
- the tone generator 70 generates a sound waveform signal when the key 100 is pressed.
- the speaker 80 outputs the sound waveform signal generated in the sound source device 70 to an external space.
- the keyboard device 1 may be provided with a slider for controlling the volume, a switch for switching timbres, a display for displaying various information, and the like.
- directions such as up, down, left, right, front, and back indicate directions when the keyboard device 1 is viewed from the performer when performing. Therefore, for example, the non-appearance part NV can be expressed as being located on the back side with respect to the appearance part PV. Further, the direction may be indicated with the key 100 as a reference, such as the front end side (key front side) and the rear end side (key rear side). In this case, the key front end side indicates the front side as viewed from the performer with respect to the key 100. The rear end side of the key indicates the back side viewed from the performer with respect to the key 100.
- the black key 100b can be expressed as a portion protruding upward from the white key 100w from the front end to the rear end of the key body of the black key 100b.
- FIG. 2 is a block diagram illustrating a configuration of the sound source device according to the first embodiment.
- the sound source device 70 includes a signal conversion unit 710, a sound source unit 730, and an output unit 750.
- the sensor 300 is provided corresponding to each key 100, detects a key operation, and outputs a signal corresponding to the detected content. In this example, the sensor 300 outputs a signal according to the key depression amount in three stages. The key pressing speed can be detected according to the interval of this signal.
- the signal conversion unit 710 acquires the output signal of the sensor 300 (sensors 300-1, 300-2,..., 300-88 corresponding to the 88 key 100), and operates according to the operation state of each key 100. Generate and output a signal.
- the operation signal is a MIDI signal. Therefore, the signal conversion unit 710 outputs note-on according to the key pressing operation. At this time, the key number indicating which of the 88 keys 100 has been operated and the velocity corresponding to the key pressing speed are also output in association with the note-on.
- the signal conversion unit 710 outputs the key number and note-off in association with each other.
- a signal corresponding to another operation such as a pedal may be input to the signal conversion unit 710 and reflected in the operation signal.
- the sound source unit 730 generates a sound waveform signal based on the operation signal output from the signal conversion unit 710.
- the output unit 750 outputs the sound waveform signal generated by the sound source unit 730. This sound waveform signal is output to, for example, the speaker 80 or the sound waveform signal output terminal.
- FIG. 3 is an explanatory diagram when the configuration inside the housing in the first embodiment is viewed from the side.
- the keyboard assembly 10 and the speaker 80 are arranged inside the housing 90. That is, the housing 90 covers at least a part of the keyboard assembly 10 (the connection portion 180 and the frame 500) and the speaker 80.
- the speaker 80 is disposed on the back side of the keyboard assembly 10.
- the speaker 80 is arranged so as to output a sound corresponding to the key depression toward the upper side and the lower side of the housing 90.
- the sound output downward advances from the lower surface side of the housing 90 to the outside.
- the sound SR output upward passes through the space inside the keyboard assembly 10 from the inside of the housing 90 and from the gap between adjacent keys 100 or the gap between the key 100 and the housing 90 in the external appearance PV. Proceed outside.
- the configuration of the keyboard assembly 10 will be described with reference to FIG.
- the keyboard assembly 10 includes a connection portion 180, a hammer assembly 200, and a frame 500 in addition to the key 100 described above.
- the keyboard assembly 10 is a resin-made structure whose most configuration is manufactured by injection molding or the like.
- the frame 500 is fixed to the housing 90.
- the connection unit 180 connects the key 100 so as to be rotatable with respect to the frame 500.
- the connection part 180 includes a plate-like flexible member 181, a first support part 183, and a rotation part 185.
- the plate-like flexible member 181 extends from the rear end of the key 100.
- the first support portion 183 extends from the rear end of the plate-like flexible member 181.
- the rotation unit 185 includes a rod-shaped flexible member 1850, a key side support unit 1851, and a frame side support unit 1852.
- the key side support portion 1851 and the frame side support portion 1852 support both ends of the rod-shaped flexible member 1850 in the longitudinal direction.
- the key side support portion 1851 supports the front side of the rod-shaped flexible member 1850.
- the frame side support portion 1852 and the back side of the rod-shaped flexible member 1850 are supported.
- the rod-shaped flexible member 1850 has flexibility in a direction perpendicular to the longitudinal direction.
- the key-side support portion 1851 and the frame-side support portion 1852 are made of the same material as the rod-like flexible member 1850, but have a shape that is more rigid than the rod-like flexible member 1850.
- the positional relationship between the key-side support portion 1851 and the frame-side support portion 1852 changes according to the deformation of the rod-shaped flexible member 1850.
- the longitudinal direction of the rod-shaped flexible member 1850 is substantially along the front-rear direction of the key 100.
- the key-side support portion 1851 moves upward with respect to the frame-side support portion 1852, and the key 100 can rotate with respect to the frame 500.
- the key 100 and the frame 500 may be connected to each other via a shaft and a bearing so that the key 100 can be rotated with respect to the frame 500.
- the key 100 includes a front end key guide 151 and a side key guide 153.
- the front end key guide 151 is slidably in contact with the front end frame guide 511 of the frame 500.
- the front end key guide 151 is in contact with the front end frame guide 511 on both sides of the upper and lower scale directions.
- the side key guide 153 is slidably in contact with the side frame guide 513 on both sides in the scale direction.
- the side key guide 153 is disposed in a region corresponding to the non-appearance portion NV on the side surface of the key 100, and exists on the key front end side with respect to the connection portion 180 (plate-like flexible member 181). You may arrange
- the key 100 is connected to the key-side load unit 120 below the appearance unit PV.
- the key-side load portion 120 is connected to the hammer assembly 200 so that the hammer assembly 200 is rotated when the key 100 is rotated.
- the hammer assembly 200 (rotating member) is disposed in a space below the key 100 and is rotatably attached to the frame 500.
- the hammer assembly 200 includes a weight part 230 and a hammer body part 250.
- a bearing 220 is disposed on the hammer body 250.
- the bearing 220 and the rotation shaft 520 provided on the frame 500 are slidably in contact with each other at at least three points. That is, the hammer assembly 200 can rotate about the rotation shaft 520 whose position is fixed with respect to the frame 500.
- the rotation shaft 520 extends in the scale direction. Note that the bearing may be provided on the frame 500 and the rotation shaft may be provided on the hammer assembly 200.
- the weight part 230 includes a metal weight manufactured by die casting or the like.
- the weight part 230 has higher rigidity than the hammer main body part 250 formed of resin. Further, the specific gravity of the weight portion 230 is larger than the specific gravity of the hammer body portion 250.
- the weight portion 230 is connected to the rear end portion of the hammer main body portion 250 (the back side from the rotation shaft). In a normal state (when the key is not pressed), the hammer assembly 200 is placed on the lower stopper 410. As a result, the key 100 is stabilized at the rest position. When the key is depressed, the weight portion 230 moves upward, and the hammer assembly 200 collides with the upper stopper 430. This defines the end position that is the maximum key depression amount of the key 100.
- the weight 230 also applies a load to the key press.
- the lower stopper 410 and the upper stopper 430 are formed of a buffer material or the like (nonwoven fabric, elastic body, etc.). The details of the relationship between the hammer body 250 and the weight 230 will be described later.
- the hammer side load portion 210 is connected to the front end portion of the hammer main body portion 250.
- the hammer side load portion 210 includes a portion (a columnar member 211 described later; see FIG. 4) that is slidably contacted in the front-rear direction inside the key side load portion 120.
- a lubricant such as grease may be disposed at the contact portion.
- the hammer-side load unit 210 and the key-side load unit 120 (in the following description, these may be collectively referred to as “load generation unit”) generate a part of the load when the key is pressed by sliding on each other. To do.
- the load generating unit is located below the key 100 in the appearance portion PV (frontward from the rear end of the key body). The detailed structure of the load generator will be described later.
- the sensor 300 is attached to the frame 500 below the load generating unit.
- the sensor 300 When the hammer-side load section 210 deforms the sensor 300 on its lower surface side by pressing the key, the sensor 300 outputs a detection signal.
- the sensor 300 is provided corresponding to each key 100.
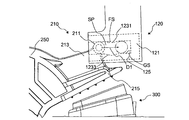
- FIG. 4 is an explanatory diagram of a load generation unit (key side load unit and hammer side load unit) in the first embodiment.
- the hammer side load part 210 includes a columnar member 211, a rib part 213, and a sensor driving part 215. Each of these components is also connected to the hammer body 250.
- the columnar member 211 has a substantially cylindrical shape, and its axis extends in the scale direction.
- the rib part 213 is a rib connected below the columnar member 211, and in this example, the normal direction of the surface thereof is along the scale direction.
- the sensor drive unit 215 is a plate-like member that is connected below the rib portion 213 and has a normal surface in a direction perpendicular to the scale direction. That is, the sensor driving unit 215 and the rib portion 213 are in a vertical relationship.
- the rib part 213 includes in the plane the direction of movement by pressing the key. Therefore, it has the effect of reinforcing the strength of the columnar member 211 and the sensor driving unit 215 with respect to the moving direction when the key is pressed.
- the key side load part 120 includes a sliding surface forming part 121.
- the sliding surface forming part 121 forms a space SP in which the columnar member 211 can move.
- a sliding surface FS is formed above the space SP, and a guide surface GS is formed below the space SP.
- a slit 125 for allowing the rib portion 213 to pass is formed in the guide surface GS.
- At least the region where the sliding surface FS is formed is formed of an elastic body such as rubber.
- the columnar member 211 is formed of a member (for example, a highly rigid resin) that is less likely to be elastically deformed than the elastic body that forms the sliding surface FS.
- FIG. 4 shows the position of the columnar member 211 when the key 100 is at the rest position.
- a force is applied to the columnar member 211 from the sliding surface FS. That is, the columnar member 211 serves as a power point to which the force from the key 100 is transmitted.
- the force transmitted to the columnar member 211 rotates the hammer assembly 200 so as to move the weight portion 230 upward.
- the columnar member 211 is pressed against the sliding surface FS.
- the columnar member 211 moves in the direction of the arrow D1 in the space SP while being in contact with the sliding surface FS. That is, the columnar member 211 slides on the sliding surface FS.
- the entire load generating unit moves downward as the key is pressed, and the sensor driving unit 215 deforms the sensor 300 from above.
- the stepped portion 1231 is arranged in the sliding surface FS in a range in which the columnar member 211 moves by the key 100 turning from the rest position to the end position. That is, the stepped portion 1231 is overcome by the columnar member 211 that moves from the initial position (the position of the columnar member 211 when the key 100 is at the rest position). The load that changes when getting over is transmitted to the key 100 and transmitted to the finger that presses the key.
- a concave portion 1233 is formed in a portion of the guide surface GS that faces the stepped portion 1231.
- FIG. 5 is a diagram for explaining the operation of the key assembly when the key (white key) in the first embodiment is pressed.
- FIG. 5A is a diagram when the key 100 is in the rest position (a state where the key is not depressed).
- FIG. 5B is a diagram when the key 100 is in the end position (the state where the key is pressed to the end).
- the turning portion 185 specifically, the rod-like flexible member 1850 is bent around the turning center.
- the key 100 rotates in the pitch direction.
- the key side load portion 120 pushes down the hammer side load portion 210
- the hammer assembly 200 rotates around the rotation shaft 520.
- the hammer assembly 200 collides with the upper stopper 430, the rotation of the hammer assembly 200 is stopped, and the key 100 reaches the end position. Further, when the sensor 300 is deformed by the hammer side load unit 210, the sensor 300 outputs detection signals at a plurality of stages according to the deformed amount (key press amount).
- FIG. 6 is a view for explaining the structure of the hammer assembly in the first embodiment.
- FIG. 6A is a side view of the hammer assembly 200.
- FIG. 6B is a view of the hammer assembly 200 as viewed from above (view along the direction Db shown in FIG. 6A).
- FIG. 6C is a view of the hammer assembly 200 as viewed from the rear side (view along the direction Dc shown in FIG. 6A).
- the hammer assembly 200 includes the hammer side load portion 210, the hammer main body portion 250, and the weight portion 230.
- the hammer main body 250 includes a first flat plate portion 255 (plate-like region) and a second flat plate portion 259.
- the first flat plate portion 255 and the second flat plate portion 259 have a flat plate structure extending in a direction away from the rotation shaft 520.
- the first flat plate portion 255 is substantially orthogonal to the rotation shaft 520, but is not orthogonal. That is, the rotation passing through the columnar member 211 (which may be the center of the bearing portion 220), which is a surface having the direction of the rotation shaft 520 as a normal line and serving as a power point to which the force from the key 100 is transmitted.
- the first flat plate portion 255 is not parallel to the surface (hereinafter referred to as the assembly center plane Pr) and is slightly inclined.
- the first flat plate portion 255 is separated from the assembly center plane Pr in the vicinity of the portion to which the second flat plate portion 259 is connected (on the side close to the rotation shaft 520), and the assembly center surface as the distance from the rotation shaft 520 increases.
- the structure approaches Pr (see FIG. 7 for more details).
- the first flat plate portion 255 may be parallel to the assembly center plane Pr.
- the first flat plate portion 255 and the second flat plate portion 259 are not in a parallel relationship, but may be in a parallel relationship.
- the first flat plate portion 255 includes at least a region along a plane that intersects the rotation axis.
- a rib 259a is connected to the second flat plate portion 259.
- the rib 259a protrudes from the second flat plate portion 259 in the direction along the rotation shaft 520.
- the strength of the second flat plate portion 259 is improved by the rib 259a.
- Below the second flat plate portion 259 a bearing portion 220 and a shaft support portion 225 that are in contact with the rotating shaft 520 are connected.
- the bearing 220 is a structure having a shape along the surface of the cylindrical portion of the rotation shaft 520 having a substantially semi-cylindrical shape, and slides with the rotation shaft 520. That is, the central axis of the inner surface of the bearing portion 220 and the central axis of the rotation shaft 520 are substantially the same and become the rotation center C.
- the shaft support portion 225 is a flat plate-like structure that is in contact with the vicinity of the center axis of the cylinder of the rotation shaft 520. With this structure, the hammer assembly 200 rotates around the rotation shaft 520 as the rotation center C.
- the shaft support portion 225 is a flat plate-like flexible member, and has a tip portion that can approach and separate from the second flat plate portion 259. This tip portion maintains a state of contact with the rotation shaft 520 when the hammer assembly 200 is rotating.
- the bearing portion 220 can be separated from the rotating shaft 520. As a result, the hammer assembly 200 can be removed from the rotation shaft 520.
- the first flat plate portion 255 is connected to the rear side of the second flat plate portion 259.
- a hammer side load portion 210 is connected to the front side of the second flat plate portion 259.
- the 1st flat plate part 255 and the hammer side load part 210 are arrange
- a weight portion 230 is disposed along the first flat plate portion 255.
- the weight portion 230 is disposed on the bass side in the scale direction with respect to the first flat plate portion 255.
- the weight 230 is thicker as it is closer to the rotation center C.
- the first flat plate portion 255 and the weight portion 230 are fixed with an adhesive in this example.
- the upper side wall portion 251 and the lower side wall portion 253 are connected to the first flat plate portion 255 in a region away from the rotation center C.
- the upper side wall part 251 and the lower side wall part 253 are supported with the outer peripheral side (the side far from the rotation center) of the weight part 230 interposed therebetween.
- the upper side wall part 251 extends in a substantially vertical direction from the upper end side of the first flat plate part 255 and covers the side part of the weight part 230.
- This side portion is a part (side surface 230c1) of the upper surface in the rotation direction among the side surfaces of the weight portion 230 (see FIGS. 8 to 10).
- the lower side wall part 253 extends in a substantially vertical direction from the lower end side of the first flat plate part 255 and covers the side part of the weight part 230.
- This side portion is a part (side surface 230c3) of the lower surface in the rotation direction among the side surfaces of the weight portion 230 (see FIGS. 8 to 10).
- the lower side wall part 253 is shorter than the upper side wall part 251, but may be the same.
- a rib protruding in the direction of the lower side wall portion 253 is arranged on the upper side wall portion 251.
- a rib protruding in the direction of the upper side wall portion 251 is disposed on the lower side wall portion 253. Details of the rib will be described later with reference to FIG.
- the weight portion 230 is sandwiched between the upper side wall portion 251 and the lower side wall portion 253 via these ribs.
- An upper rib portion 2515 is disposed on the upper surface side of the upper side wall portion 251 along a direction perpendicular to the rotation shaft 520.
- a lower rib portion 2535 is disposed on the lower surface side of the lower side wall portion 253 along a direction perpendicular to the rotation shaft 520.
- the upper side wall portion 251 and the upper rib portion 2515 come into contact with the upper stopper 430 when the key is pressed.
- the lower side wall portion 253 and the lower rib portion 2535 are in contact with the lower stopper 410 when the key is released
- FIG. 7 is a view for explaining the structure of the hammer body in the first embodiment. Except for the region where the weight portion 230 is disposed in the hammer main body portion 250, it is the same as that shown in FIG. Therefore, FIG. 7 shows a configuration in the vicinity of the first flat plate portion 255 in which the weight portion 230 is arranged in the hammer main body portion 250.
- FIGS. 7A and 7C show the hammer body 250 in the same positional relationship as FIGS. 6A and 6C, respectively.
- FIG. 7B shows the hammer body 250 viewed from the opposite side (lower side) to FIG. 6B.
- a surface on which the weight portion 230 is disposed is referred to as a weight disposition surface 255a, and a surface opposite to the weight disposition surface 255a is referred to as an outer surface 255b.
- the upper side wall portion 251 and the lower side wall portion 253 are connected to the first flat plate portion 255 on the weight arrangement surface 255a side.
- the upper side wall part 251 and the lower side wall part 253 are arranged to face each other.
- the weight portion 230 is arranged between the upper side wall portion 251 and the lower side wall portion 253, but before the arrangement, the distance between the upper side wall portion 251 and the lower side wall portion 253 is shorter than after the arrangement. It has become. That is, by arranging the weight portion 230, the upper side wall portion 251 and the lower side wall portion 253 are slightly expanded outward.
- Ribs are arranged on the upper side wall 251 and the lower side wall 253.
- the upper side wall portion 251 includes ribs 2517a, 2517b, 2517c, and 2517d.
- the ribs 2517a, 2517b, 2517c, and 2517d protrude downward (downward side wall 253 side) and extend in a direction along the rotation axis.
- the ribs 2517 a and 2517 b are arranged at positions facing the lower side wall portion 253.
- the lower side wall portion 253 includes ribs 2537a and 2537b.
- the ribs 2537a and 2537b protrude upward (upper side wall portion 251 side) and extend in a direction along the rotation axis.
- the rib 2517a and the rib 2537a have a positional relationship facing each other, but the rib 2517b and the rib 2537b have a positional relationship not facing each other.
- the positional relationship between the two may be a relationship that faces each other, or may be a relationship that does not face each other.
- FIG. 8 is a diagram for explaining the structure of the weight portion in the first embodiment.
- FIG. 9 is a diagram illustrating an A-A ′ cross-sectional structure of the weight portion in the first embodiment.
- FIG. 10 is a view for explaining the B-B ′ cross-sectional structure of the weight portion in the first embodiment.
- the cutting line A-A ′ is along the longitudinal direction of the weight portion 230.
- the cutting line B-B ′ is along a direction (rotation direction) perpendicular to the cutting line A-A ′.
- the surface (connection surface) facing the first flat plate portion 255 is the first surface 230a, and the surface opposite to the first surface 230a (exposed surface).
- the second surface 230b, and the surface connecting the first surface 230a and the second surface 230b are referred to as side surfaces 230c1 to 230c4.
- the side surface 230c1 is an upper surface including a portion covered with the upper side wall portion 251.
- the side surface 230c2 is a side surface on the rotation center side (front side).
- the side surface 230c3 is a lower surface including a portion covered by the lower side wall portion 253.
- the side surface 230c4 is a side surface on the opposite side (outer peripheral side, rear side) from the rotation center. As described above, the weight portion 230 is disposed on the bass side in the scale direction with respect to the first flat plate portion 255. Accordingly, the first surface 230a (connection surface) faces the high sound side and is covered with the first flat plate portion 255, while the second surface 230b (exposed surface) is exposed facing the low sound side.
- the weight portion 230 includes a plate-like portion in which the first surface 230a (connection surface) and the second surface 230b (exposed surface) face each other, and is thicker as it is closer to the rotation center.
- the length along the rotation axis direction between the first surface 230a and the second surface 230b (the thickness of the weight portion 230) Wt (Wt1, Wt2, Wt3) becomes larger as it is closer to the rotation center.
- Wt1 corresponds to the thickness on the rotation center side
- Wt3 corresponds to the thickness on the outer peripheral side
- Wt2 corresponds to the thickness of the central portion. Therefore, the relationship is Wt1> Wt2> Wt3.
- the area of the second surface 230b is larger than the area of the first surface 230a.
- the side surfaces 230c1, 230c2, 230c3, and 230c4 are not perpendicular to the first surface 230a and the second surface 230b.
- the side surface 230c2 and the side surface 230c4 may be perpendicular to the first surface 230a and the second surface 230b.
- a cross section at a predetermined position in the weight portion 230 and along the rotation direction is a direction perpendicular to the rotation axis.
- portions corresponding to the first surface 230a, the second surface 230b, and the side surfaces 230c1 and 230c3 appear on the outer edge.
- the outer edge portion corresponding to the first surface 230a and the outer edge portion corresponding to the second surface 230b are parallel and perpendicular to the rotation axis direction (left-right direction in the figure). In addition, these outer edge parts do not need to be parallel.
- the length k1 of the outer edge portion corresponding to the first surface 230a is smaller than the length k2 of the outer edge portion corresponding to the second surface 230b (k1 ⁇ k2). Therefore, the cross-sectional shape is a trapezoid having the first surface 230a and the second surface 230b as an upper base and a lower base.
- a line including a plurality of positions at 0.5 Wt from each surface is defined as a center line Wc. That is, at each position on the center line Wc, the distance to the first surface 230a is equal to the distance to the second surface 230b.
- the center of gravity T of the weight portion 230 when viewed in this cross section is closer to the second surface 230b than the center line Wc. That is, the distance from the center of gravity T to the first surface 230a is longer than the distance from the center of gravity T to the second surface 230b.
- the length of the line from the center of gravity T of the weight 230 toward the first surface 230a and the line perpendicular to the first surface 230a is the line from the center of gravity T toward the second surface 230b.
- the length of the line perpendicular to the second surface 230b is longer.
- the length of the perpendicular of the first surface 230a extending from the center of gravity T to the first surface 230a is longer than the length of the perpendicular of the second surface 230b extending from the center of gravity T to the second surface 230b.
- 10 is a cross section at a predetermined position of the weight portion 230 and is a cross section along the rotation direction of the weight portion 230. In the cross section along the rotational direction of the weight part 230 including the position of the center of gravity T of the weight part 230, the center of gravity T is closer to the outer edge part corresponding to the second surface 230b than to the outer edge part corresponding to the first surface 230a. It will be located at a close position.
- the partial key 100 is a key corresponding to the sound of E (hereinafter referred to as E key).
- E key a key corresponding to the sound of E
- C key a key corresponding to the sound of C
- the difference in the center of gravity position of the hammer assembly 200 will be described by comparing the case of the E key (first key) and the case of the C key (third key).
- FIG. 11 is a diagram for explaining a difference in the gravity center position of the hammer assembly according to the weight arrangement method in the first embodiment.
- FIG. 11 shows a cross-sectional structure of the hammer assembly 200 corresponding to the C key (C-Key) and the E key (E-Key) with respect to the cutting line C-C ′ shown in FIG.
- the weight portion 230 is fixed to the first flat plate portion 255 with an adhesive 243.
- the position of the cutting line C-C ′ in FIG. 6A corresponds to the position of the center of gravity T of the weight portion 230. That is, the cross section of FIGS.
- 11A and 11B is a cross section including the position of the gravity center T of the weight portion 230 and is a cross section along the rotation direction of the weight portion 230. Accordingly, in FIGS. 11A and 11B, the center of gravity T of the weight portion 230 is at a position where the distance from the center of gravity T to the first surface 230a is different from the distance from the center of gravity T to the second surface 230b. is there.
- the first surface 230a having a smaller area than the second surface 230b is disposed to face the first flat plate portion 255.
- the center of gravity T of the weight portion 230 is located on the exposed surface (second surface 230b) rather than the connection surface (first surface 230a). Due to the first flat plate portion 255 existing at a position different from the assembly center plane Pr, the center of gravity TxE as the hammer assembly 200 corresponding to the key E is closer to the first flat plate portion 255 than the center of gravity T of the weight portion 230.
- centroids TxC and TxE in FIG. 11 indicate the positions of the two-dot chain lines TxC and TxE shown in FIG. 12 in the cross-sectional view of FIG. That is, since the centroids TxC and TxE are located in front of the cutting line CC ′, they do not exist on the cross section along the cutting line CC ′, but the positional relationship between the centroids TxC and TxE and the assembly center plane Pr. For the purpose of illustration, centroids TxC and TxE are shown on the cross-sectional view of FIG.
- the direction of the weight portion 230 is opposite to that of the E key.
- the second surface 230b having a larger area than the first surface 230a is arranged facing the first flat plate portion 255. Therefore, the first surface 230a becomes an exposed surface, and the second surface 230b becomes a connection surface.
- the center of gravity T is located on the second surface 230b (connection surface) rather than the first surface 230a (exposed surface).
- the center of gravity TxC as the hammer assembly 200 corresponding to the key of C is closer to the first flat plate portion 255 than the gravity center T of the weight portion 230, It exists on the treble side (connection surface side, E key side) from the assembly center plane Pr.
- the center of gravity TxC as the hammer assembly 200 is located higher than the assembly center plane Pr even though the center of gravity T of the weight 230 is on the lower side (exposed surface side) than the assembly center plane Pr. You can also.
- the second surface 230b having a large area is a connection surface existing on the first flat plate portion 255 side.
- the gravity center TxC and the gravity center TxE are compared, the gravity center TxC is closer to the first flat plate portion 255, and in this example, is closer to the assembly center plane Pr.
- the gravity center as the hammer assembly 200 can be adjusted by changing the relationship between the connection surface and the exposed surface.
- FIG. 12 is a diagram for explaining the positional relationship among the key, the assembly center plane, and the center of gravity of the hammer assembly in the first embodiment.
- FIG. 12 is a view of the key 100 as viewed from above, and shows the assembly center plane Pr and the centers of gravity TxC and TxE.
- the centroids TxC and TxE are indicated by two-dot chain lines, but these are displayed in FIG. 12 for explaining the positional relationship between the centroids TxC and TxE and the hammer assembly center plane Pr. Is.
- the two-dot chain line TxC is a line that passes through the center of gravity TxC as the hammer assembly 200 corresponding to the C key and is parallel to the assembly center plane Pr of the hammer assembly corresponding to the C key.
- a two-dot chain line TxE is a line that passes through the center of gravity TxE as the hammer assembly 200 corresponding to the key E and is parallel to the assembly center plane Pr of the hammer assembly corresponding to the key E. Due to the presence of the black key, the shape of the white key varies depending on the pitch. In particular, the C key and the E key have low symmetry with respect to the assembly center plane Pr. The same applies to the F key and B key (not shown). In such a key, when the key is pressed, the operation position with respect to the key is often at a position away from the assembly center plane Pr.
- the operation position is a C key, it is often on the high sound side (E key side) from the assembly center plane Pr, and if it is an E key, the low sound side (C key side) from the assembly center plane Pr. Often.
- the weight part 230 By attaching the weight part 230 to the first flat plate part 255 as described above, the position of the center of gravity of the hammer assembly 200 can be adjusted for each key, and the center of gravity of the hammer assembly 200 can be brought closer to the operation position of each key. As a result, the operation of the hammer assembly 200 is stabilized, and an improvement in touch feeling and durability are expected.
- the distance between the center of gravity of the hammer assembly 200 and the assembly center plane Pr is determined in the case of the key of C and E It may be smaller than the case of the key.
- the center of gravity of the hammer assembly 200 may be included in the assembly center plane Pr by making this distance close to zero.
- the positional relationship between the gravity center of the hammer assembly 200 and the assembly center plane Pr described above is merely an example, and various relationships can be set according to a target touch feeling or the like.
- the weight portion 230 whose center of gravity T is not centered the first flat plate portion 255 is used while using the same weight portion 230 as in the case of the C key and the E key.
- the position of the center of gravity of the hammer assembly 200 with respect to the assembly center plane Pr can be changed by changing the attachment method to the (hammer body 250).
- the weight part 230 in the first embodiment described above can take various other shapes.
- a plurality of shapes are illustrated.
- FIG. 13 is a diagram illustrating the shape of the weight portion in the second embodiment.
- the thickness Wt of the weight portion 230A is larger than that of the first embodiment, the length k1 of the outer edge portion corresponding to the first surface 230Aa and the length of the outer edge portion corresponding to the second surface 230Ab.
- the difference from k2 is even greater.
- the position of the center of gravity T of the weight portion 230A can be adjusted, and the position of the center of gravity Tx of the hammer assembly 200A can be made substantially coincident with the assembly center plane Pr.
- the position of the center of gravity T can be adjusted variously, and as a result, the position of the center of gravity Tx can be adjusted.
- FIG. 14 is a diagram illustrating the shape of the weight portion in the third embodiment.
- the side surfaces 230c1 and 230c3 have a substantially planar shape, but may have a shape in which a plurality of planes are connected or may have a curved surface shape.
- the side surface portion is an example in which a plurality of planes are combined to include a region extending outward.
- the side surface 230Bc1 (third surface) connecting the first surface 230Ba and the second surface 230Bb is the top portion 230Bc1p, the side surface 230Bc11 on the first surface 230Ba side with respect to the top portion 230Bc1p, and the top surface 230Bc1p.
- a side surface 230Bc12 on the two surfaces 230Bb side is provided.
- the side surface 230Bc3 (third surface) connecting the first surface 230Ba and the second surface 230Bb is the top portion 230Bc3p, the side surface 230Bc31 on the first surface 230Ba side with respect to the top portion 230Bc3p, and the second side with respect to the top portion 230Bc3p.
- a side surface 230Bc32 on the surface 230Bb side is provided. That is, the outer edge portion corresponding to the side surface 230Bc1 between the first surface 230Ba and the second surface 230Bb includes a region extending outward from the first surface 230Ba and the second surface 230Bb. Similarly, the outer edge portion corresponding to the side surface 230Bc3 between the first surface 230Ba and the second surface 230Bb includes a region extending outward from the first surface 230Ba and the second surface 230Bb.
- the center of gravity Tx of the hammer assembly 200B matches the line PL, but it does not necessarily have to match.
- the position of the center of gravity T is adjusted variously by adjusting the ratio of k1, k2 and k3, the length of Wt, and the ratio of Wa and Wb. The position can be adjusted.
- FIG. 15 is a diagram illustrating the shape of the weight portion in the fourth embodiment.
- the side surfaces 230c1 and 230c3 have substantially planar shapes, but the side surface portions may change discontinuously.
- the weight portion 230C has a shape in which the first weight portion 230C1 on the first surface 230Ca side and the second weight portion 230C2 on the second surface 230Cb side are coupled.
- the first weight portion 230C1 has a shape corresponding to the length k1 and the thickness Wa.
- the second weight portion 230C2 has a shape corresponding to the length k2 and the thickness Wb.
- the position of the center of gravity T is variously adjusted by adjusting the ratio of k1 and k2, the length of Wt, and the ratio of Wa and Wb.
- the center of gravity of the hammer assembly 200C is adjusted.
- the position of Tx can be adjusted. Note that the position of the center of gravity T may be adjusted by changing the size of the portion where the first weight portion 230C1 and the second weight portion 230C2 are joined.
- FIG. 16 is a diagram illustrating the shape of the weight portion in the fifth embodiment.
- the first surface 230a and the second surface 230b have a positional relationship in which the centers with respect to the rotation direction are the same, but the centers with respect to the rotation direction may be shifted.
- the positions of the center Wac of the first surface 230Da and the center Wbc of the second surface 230Db are different.
- Wac is shifted downward with respect to Wbc.
- the center of gravity Tx of the hammer assembly 200D can be adjusted by adjusting the position of the center of gravity T with respect to the vertical direction (rotating direction).
- the hammer main body 250 has the weight portion sandwiched between the upper side wall portion 251 and the lower side wall portion 253, but does not necessarily have to be sandwiched.
- a hammer assembly 200E in which the weight portion 230A is connected to the first flat plate portion 255E without being sandwiched between the upper side wall portion 251 and the lower side wall portion 253 in the second embodiment will be described.
- FIG. 17 is a diagram for explaining the shape of the weight portion in the sixth embodiment.
- the hammer assembly 200E does not have the weight portion 230A sandwiched between the upper side wall portion 251 and the lower side wall portion 253. Therefore, the influence of the first flat plate portion 255E is greater than in the second embodiment, and the position of the center of gravity Tx of the hammer assembly 200E with respect to the center of gravity T changes more than in the case of the second embodiment. Therefore, in the second embodiment, the center of gravity Tx of the hammer assembly 200A substantially coincides with the assembly center plane Pr. However, in the sixth embodiment, the center of gravity Tx of the hammer assembly 200E is closer to the first flat plate portion 255E than the assembly center plane Pr. Will exist. Thus, the position of the center of gravity Tx can be further adjusted by the shape of the hammer body.
- the first surface 230a and the second surface 230b in the weight portion 230 do not have to be a continuous planar shape, and are uneven in part, or penetrate the first surface 230a and the second surface 230b. A hole may be formed. In this case, it is good also as the 1st surface 230a and the 2nd surface 230b other than the area
- the external shape when the weight 230 is viewed from the first surface 230a side may be other than the rectangle.
- the weight portion 230 is formed of one material, but may be formed by combining a plurality of materials having different specific gravities.
- the weight portion 230C may be formed by forming and bonding the first weight portion 230C1 and the second weight portion 230C2 with different materials.
- the center of gravity T can be changed by this combination.
- the hammer assembly 200 is disposed so that the position of the weight portion 230 with respect to the rotation shaft 520 is on the rear end side of the key 100, but is disposed so that this position is on the front end side of the key 100. Also good.
- the hammer assembly 200 of the above-described embodiment is configured to be driven by the key 100, but is not limited thereto. For example, it may be driven by another action member (for example, a jack or a support constituting an action mechanism of an acoustic piano).
- a rotation shaft support portion for example, bearing portion 220
- a portion that receives a force from another member for example, key 100
- a sensor drive portion for example, sensor drive portion 215)
- a weight for example, the arrangement of the weight portion 230
- the arrangement of the weight portion 230 is not limited to the above-described embodiment, and may be appropriately designed according to the keyboard structure.
- the sensor driving portion can be omitted. For example, it is not always necessary to have all the functions of the hammer assembly 200 of the present embodiment, and the configuration may be appropriately designed.
- the hammer main body portion 250 and the weight portion 230 are each constituted by a single member, but may be constituted by a plurality of members.
- the bearing of the hammer body 250 may be a separate part instead of the bearing 220.
- different types of bearing parts may be assembled to the common structure of the hammer body 250 excluding the bearing portion. Thereby, the structure of the bearing portion of the hammer main body can be easily changed.
- one weight 230 is attached to the hammer body 250, but a plurality of weights 230 may be attached so as to sandwich the hammer body 250.
- the center of gravity of the sum of the plurality of weight portions 230 and the assembly center plane Pr may be at different positions.
- Frame side support part 200, 200A, 200B, 200C, 200D, 200E ... Hammer assembly, 210 ... Hammer side load part, 211 ... Columnar member, 213 ... Rib part, 215 ... Sensor drive part, 220 ... Bearing part, 225 ... Shaft support part, 230, 230A, 230B, 230C, 230D ... Weight part, 230a 230Aa, 230Ba, 230Ca, 230Da ... first surface, 230b, 230Ab, 230Bb, 230Cb, 230Db ...
Landscapes
- Electrophonic Musical Instruments (AREA)
Abstract
ハンマアセンブリの重心の位置を容易に制御すること 本開示の一実施形態におけるハンマアセンブリは、回動軸を中心に回動するハンマ本体部と、前記ハンマ本体部の一部の領域に面する接続面と当該接続面と反対側の露出面を含む錘部と、を備え、回動軸に垂直な方向に見た場合の錘部の重心は、当該重心から接続面までの距離と、当該重心から露出面までの距離とが異なる位置である。
Description
本開示は、ハンマアセンブリに関する。
アコースティックピアノにおいては、アクション機構の動作により、鍵を通して演奏者の指に所定の感覚(以下、タッチ感という)を与える。電子ピアノ等の電子鍵盤装置における押鍵時にも、アコースティックピアノにおけるタッチ感を得られるようにすることが求められている。電子鍵盤装置においてタッチ感を得るために、押鍵に伴って回動する構造体に錘が設けられる(例えば、特許文献1)。特許文献1に開示された技術によれば、アコースティックピアノのタッチ感に近づけるために、高音側と低音側とで異なる重量を有する錘が使用されている。なお、このような構造体は、アコースティックピアノにおいて類似した構成に対応させて、一般的にハンマと表現されることが多いが、電子鍵盤装置には弦が存在しないため、弦を打撃する機能を有しているわけではない。
ところで、電子鍵盤装置では、ハンマアセンブリの錘部を回動させる機構は、アコースティックピアノによるハンマを回動させる機構とは異なっている。そのため、その機構によって、アコースティックピアノのタッチ感により近づけたり、耐久性を向上させたりするための手法は様々であるが、できるだけ簡易な方法で実現することが望ましい。このような手法の一つとして、例えば、ハンマアセンブリの重心の位置を制御することが考えられる。
本開示の目的の一つは、ハンマアセンブリの重心の位置を容易に制御することにある。
本開示に係るハンマアセンブリは、回動軸を中心に回動するハンマ本体部と、前記ハンマ本体部の一部の領域に面する接続面と当該接続面と反対側の露出面を含む錘部と、を備え、回動軸に垂直な方向に見た場合の前記錘部の重心は、当該重心から前記接続面までの距離と、当該重心から前記露出面までの距離とが異なる位置である。
また、本開示の別の観点に係るハンマアセンブリは、回動軸を中心に回動するハンマ本体部と、前記ハンマ本体部の一部の領域に面する接続面と当該接続面と反対側の露出面を含む錘部と、を備え、前記錘部は、所定の位置における回動方向に沿った断面の外縁のうち、前記接続面に対応する部分の大きさと前記露出面に対応する部分の大きさとが異なる形状を有する。
前記錘部は、前記接続面と前記露出面とが対向する板状部分を含んでもよい。
前記錘部は、前記ハンマ本体部に対して取付部材によって取り付けられていてもよい。
前記錘部は、所定の位置における回動方向に沿った断面の外縁のうち、前記接続面と前記露出面との間に対応する部分は、当該接続面および当該露出面から外側に拡がった領域を含んでもよい。
前記外側に拡がった領域の頂部は、前記接続面と前記露出面との中央とは異なる位置であってもよい。
前記ハンマ本体部は、鍵からの力が伝達される力点を含み、前記力点を通り前記回動軸に垂直なアセンブリ中心面と、前記錘部の重心とは異なる位置であってもよい。
前記錘部は複数であり、前記ハンマ本体部は、鍵からの力が伝達される力点を含み、前記力点を通り前記回動軸に垂直なアセンブリ中心面と、複数の前記錘部の総和の重心とは異なる位置であってもよい。
また、本開示に係る鍵盤装置は、フレームに対して回動可能に配置された複数の鍵と、前記複数の鍵に対応してそれぞれ配置された上記記載のハンマアセンブリとしての複数のハンマアセンブリと、を備え、前記ハンマ本体部の前記回動軸は、前記フレームに対する位置が固定され、前記鍵の回動に応じて、当該鍵に対応する前記ハンマアセンブリが前記回動軸を中心に回動する。
前記複数の鍵は、第1の鍵および第2の鍵を含み、前記ハンマ本体部は、前記鍵からの力が伝達される力点を含み、前記力点を通り前記回動軸に垂直なアセンブリ中心面を基準とした前記錘部の重心の位置は、前記第1の鍵の場合と前記第2の鍵の場合とでは異なってもよい。
前記第1の鍵に対応する前記ハンマアセンブリの重心の位置は、当該第1の鍵に対応する前記アセンブリ中心面よりも前記第2の鍵の側であり、前記第2の鍵に対応する前記ハンマアセンブリの重心の位置は、当該第2の鍵に対応する前記アセンブリ中心面よりも前記第1の鍵の側であってもよい。
本開示によれば、ハンマアセンブリの重心の位置を容易に制御することができる。
以下、本開示の一実施形態における鍵盤装置について、図面を参照しながら詳細に説明する。以下に示す実施形態は本開示の実施形態の一例であって、本開示はこれらの実施形態に限定して解釈されるものではない。なお、本実施形態で参照する図面において、同一部分または同様な機能を有する部分には同一の符号または類似の符号(数字の後にA、B等を付しただけの符号)を付し、その繰り返しの説明は省略する場合がある。また、図面の寸法比率(各構成間の比率、縦横高さ方向の比率等)は説明の都合上実際の比率とは異なったり、構成の一部が図面から省略されたりする場合がある。
<第1実施形態>
[鍵盤装置の構成]
図1は、第1実施形態における鍵盤装置の構成を示す図である。鍵盤装置1は、この例では、電子ピアノなどユーザ(演奏者)の押鍵に応じて発音する電子鍵盤楽器である。なお、鍵盤装置1は、外部の音源装置を制御するための制御データ(例えば、MIDI)を、押鍵に応じて出力する鍵盤型のコントローラであってもよい。この場合には、鍵盤装置1は、音源装置を有していなくてもよい。
[鍵盤装置の構成]
図1は、第1実施形態における鍵盤装置の構成を示す図である。鍵盤装置1は、この例では、電子ピアノなどユーザ(演奏者)の押鍵に応じて発音する電子鍵盤楽器である。なお、鍵盤装置1は、外部の音源装置を制御するための制御データ(例えば、MIDI)を、押鍵に応じて出力する鍵盤型のコントローラであってもよい。この場合には、鍵盤装置1は、音源装置を有していなくてもよい。
鍵盤装置1は、鍵盤アセンブリ10を備える。鍵盤アセンブリ10は、白鍵100wおよび黒鍵100bを含む。複数の白鍵100wと黒鍵100bとが並んで配列されている。鍵100の数は、N個であり、この例では88個であるが、この数に限られない。鍵100が配列された方向をスケール方向という。白鍵100wおよび黒鍵100bを特に区別せずに説明できる場合には、鍵100という場合がある。以下の説明においても、符号の最後に「w」を付した場合には、白鍵に対応する構成であることを意味している。また、符号の最後に「b」を付した場合には、黒鍵に対応する構成であることを意味している。
鍵盤アセンブリ10の一部は、筐体90の内部に存在している。鍵盤装置1を上方から見た場合において、鍵盤アセンブリ10のうち筐体90に覆われている部分を非外観部NVといい、筐体90から露出してユーザから視認できる部分を外観部PVという。すなわち、外観部PVは、鍵100の一部であって、ユーザによって演奏操作が可能な領域を示す。以下、鍵100のうち外観部PVによって露出されている部分を鍵本体部という場合がある。
筐体90内部には、音源装置70およびスピーカ80が配置されている。音源装置70は、鍵100の押下に伴って音波形信号を生成する。スピーカ80は、音源装置70において生成された音波形信号を外部の空間に出力する。なお、鍵盤装置1は、音量をコントロールするためのスライダ、音色を切り替えるためのスイッチ、様々な情報を表示するディスプレイなどが備えられていてもよい。
なお、本明細書における説明において、上、下、左、右、手前および奥などの方向は、演奏するときの演奏者から鍵盤装置1を見た場合の方向を示している。そのため、例えば、非外観部NVは、外観部PVよりも奥側に位置している、と表現することができる。また、鍵前端側(鍵前方側)、鍵後端側(鍵後方側)のように、鍵100を基準として方向を示す場合もある。この場合、鍵前端側は鍵100に対して演奏者から見た手前側を示す。鍵後端側は鍵100に対して演奏者から見た奥側を示す。この定義によれば、黒鍵100bのうち、黒鍵100bの鍵本体部の前端から後端までが、白鍵100wよりも上方に突出した部分である、と表現することができる。
図2は、第1実施形態における音源装置の構成を示すブロック図である。音源装置70は、信号変換部710、音源部730および出力部750を備える。センサ300は、各鍵100に対応して設けられ、鍵の操作を検出し、検出した内容に応じた信号を出力する。この例では、センサ300は、3段階の押鍵量に応じて信号を出力する。この信号の間隔に応じて押鍵速度が検出可能である。
信号変換部710は、センサ300(88の鍵100に対応したセンサ300-1、300-2、・・・、300-88)の出力信号を取得し、各鍵100における操作状態に応じた操作信号を生成して出力する。この例では、操作信号はMIDI形式の信号である。そのため、押鍵操作に応じて、信号変換部710はノートオンを出力する。このとき、88個の鍵100のいずれが操作されたかを示すキーナンバ、および押鍵速度に対応するベロシティについてもノートオンに対応付けて出力される。一方、離鍵操作に応じて、信号変換部710はキーナンバとノートオフとを対応付けて出力する。信号変換部710には、ペダル等の他の操作に応じた信号が入力され、操作信号に反映されてもよい。
音源部730は、信号変換部710から出力された操作信号に基づいて、音波形信号を生成する。出力部750は、音源部730によって生成された音波形信号を出力する。この音波形信号は、例えば、スピーカ80または音波形信号出力端子などに出力される。
[鍵盤アセンブリの構成]
図3は、第1実施形態における筐体内部の構成を側面から見た場合の説明図である。図3に示すように、筐体90の内部において、鍵盤アセンブリ10およびスピーカ80が配置されている。すなわち、筐体90は、少なくとも、鍵盤アセンブリ10の一部(接続部180およびフレーム500)およびスピーカ80を覆っている。スピーカ80は、鍵盤アセンブリ10の奥側に配置されている。このスピーカ80は、押鍵に応じた音を筐体90の上方および下方に向けて出力するように配置されている。下方に出力される音は、筐体90の下面側から外部に進む。一方、上方に出力される音SRは筐体90の内部から鍵盤アセンブリ10の内部の空間を通過して、外観部PVにおける鍵100の隣接間の隙間または鍵100と筐体90との隙間から外部に進む。
図3は、第1実施形態における筐体内部の構成を側面から見た場合の説明図である。図3に示すように、筐体90の内部において、鍵盤アセンブリ10およびスピーカ80が配置されている。すなわち、筐体90は、少なくとも、鍵盤アセンブリ10の一部(接続部180およびフレーム500)およびスピーカ80を覆っている。スピーカ80は、鍵盤アセンブリ10の奥側に配置されている。このスピーカ80は、押鍵に応じた音を筐体90の上方および下方に向けて出力するように配置されている。下方に出力される音は、筐体90の下面側から外部に進む。一方、上方に出力される音SRは筐体90の内部から鍵盤アセンブリ10の内部の空間を通過して、外観部PVにおける鍵100の隣接間の隙間または鍵100と筐体90との隙間から外部に進む。
鍵盤アセンブリ10の構成について、図3を用いて説明する。鍵盤アセンブリ10は、上述した鍵100の他にも、接続部180、ハンマアセンブリ200およびフレーム500を含む。鍵盤アセンブリ10は、ほとんどの構成が射出成形などによって製造された樹脂製の構造体である。フレーム500は、筐体90に固定されている。接続部180は、フレーム500に対して回動可能に鍵100を接続する。接続部180は、板状可撓性部材181、第1支持部183および回動部185を備える。板状可撓性部材181は、鍵100の後端から延在している。第1支持部183は、板状可撓性部材181の後端から延在している。
回動部185は、棒状可撓性部材1850、鍵側支持部1851およびフレーム側支持部1852を備える。鍵側支持部1851およびフレーム側支持部1852は、それぞれ、棒状可撓性部材1850の長手方向の両端を支持している。この例では、鍵側支持部1851は、棒状可撓性部材1850の手前側を支持する。一方、フレーム側支持部1852、棒状可撓性部材1850の奥側を支持する。
棒状可撓性部材1850は、長手方向に対して垂直な方向に可撓性を有する。一方、鍵側支持部1851およびフレーム側支持部1852は、棒状可撓性部材1850と同じ材質であるが、棒状可撓性部材1850よりも剛性を有する形状である。鍵側支持部1851とフレーム側支持部1852との位置関係は、棒状可撓性部材1850の変形に応じて変化する。この例では、棒状可撓性部材1850の長手方向は、ほぼ鍵100の前後方向に沿っている。そのため、棒状可撓性部材1850を上下方向に曲げることによって鍵側支持部1851がフレーム側支持部1852に対して上方に移動し、鍵100がフレーム500に対して回動することができる。なお、鍵100とフレーム500とが軸および軸受を介して接続されることによって、鍵100がフレーム500に対して回動することができるようにしてもよい。
鍵100は、前端鍵ガイド151および側面鍵ガイド153を備える。前端鍵ガイド151は、フレーム500の前端フレームガイド511を覆った状態で摺動可能に接触している。前端鍵ガイド151は、その上部と下部のスケール方向の両側において、前端フレームガイド511と接触している。側面鍵ガイド153は、スケール方向の両側において側面フレームガイド513と摺動可能に接触している。この例では、側面鍵ガイド153は、鍵100の側面のうち非外観部NVに対応する領域に配置され、接続部180(板状可撓性部材181)よりも鍵前端側に存在するが、外観部PVに対応する領域に配置されてもよい。
また、鍵100には、外観部PVの下方において鍵側負荷部120が接続されている。鍵側負荷部120は、鍵100が回動するときに、ハンマアセンブリ200を回動させるように、ハンマアセンブリ200に接続される。
ハンマアセンブリ200(回動部材)は、鍵100の下方側の空間に配置され、フレーム500に対して回動可能に取り付けられている。ハンマアセンブリ200は、錘部230およびハンマ本体部250を備える。ハンマ本体部250には、軸受部220が配置されている。軸受部220とフレーム500に設けられた回動軸520とは少なくとも3点で摺動可能に接触する。すなわち、ハンマアセンブリ200は、フレーム500に対して位置が固定された回動軸520を回動中心として回動することができる。回動軸520は、スケール方向に延在している。なお、軸受がフレーム500に設けられ、回動軸がハンマアセンブリ200に設けられていてもよい。
錘部230は、ダイキャスト等で製造された金属製の錘を含む。錘部230は、樹脂で形成されたハンマ本体部250よりも高い剛性を有する。また、錘部230の比重は、ハンマ本体部250の比重よりも大きい。錘部230は、ハンマ本体部250の後端部(回動軸よりも奥側)に接続されている。通常時(押鍵していないとき)には、ハンマアセンブリ200が下側ストッパ410に載置された状態になる。これによって、鍵100はレスト位置で安定する。押鍵されると、錘部230が上方に移動し、ハンマアセンブリ200が上側ストッパ430に衝突する。これによって鍵100の最大押鍵量となるエンド位置が規定される。この錘部230によっても、押鍵に対して負荷が与えられる。下側ストッパ410および上側ストッパ430は、緩衝材等(不織布、弾性体等)で形成されている。なお、ハンマ本体部250と錘部230との関係の詳細については、後述する。
ハンマ側負荷部210は、ハンマ本体部250の前端部に接続されている。ハンマ側負荷部210は、鍵側負荷部120の内部において概ね前後方向に摺動可能に接触する部分(後述する柱状部材211;図4参照)を備える。この接触部分にはグリス等の潤滑剤が配置されていてもよい。ハンマ側負荷部210および鍵側負荷部120(以下の説明において、これらをまとめて「負荷発生部」という場合がある)とは、互いに摺動することで押鍵時の負荷の一部を発生する。負荷発生部は、この例では外観部PV(鍵本体部の後端よりも前方)における鍵100の下方に位置する。負荷発生部の詳細の構造については後述する。
負荷発生部の下方において、フレーム500にセンサ300が取り付けられている。押鍵によりハンマ側負荷部210がその下面側でセンサ300を変形させると、センサ300は検出信号を出力する。センサ300は、上述したように、各鍵100に対応して設けられている。
[負荷発生部の概要]
図4は、第1実施形態における負荷発生部(鍵側負荷部およびハンマ側負荷部)の説明図である。ハンマ側負荷部210は、柱状部材211、リブ部213およびセンサ駆動部215を備える。これらの各構成はいずれも、ハンマ本体部250とも接続されている。柱状部材211は、この例では略円柱形状であり、その軸がスケール方向に延びている。リブ部213は、柱状部材211の下方に接続されたリブであって、この例では、その表面の法線方向がスケール方向に沿っている。センサ駆動部215は、リブ部213の下方に接続され、スケール方向に対して垂直な方向の法線の表面を有する板状部材である。すなわち、センサ駆動部215とリブ部213とは垂直の関係にある。ここで、リブ部213は、押鍵によって移動する方向を面内に含む。そのため、押鍵時の移動方向に対して、柱状部材211およびセンサ駆動部215の強度を補強する効果を有する。
図4は、第1実施形態における負荷発生部(鍵側負荷部およびハンマ側負荷部)の説明図である。ハンマ側負荷部210は、柱状部材211、リブ部213およびセンサ駆動部215を備える。これらの各構成はいずれも、ハンマ本体部250とも接続されている。柱状部材211は、この例では略円柱形状であり、その軸がスケール方向に延びている。リブ部213は、柱状部材211の下方に接続されたリブであって、この例では、その表面の法線方向がスケール方向に沿っている。センサ駆動部215は、リブ部213の下方に接続され、スケール方向に対して垂直な方向の法線の表面を有する板状部材である。すなわち、センサ駆動部215とリブ部213とは垂直の関係にある。ここで、リブ部213は、押鍵によって移動する方向を面内に含む。そのため、押鍵時の移動方向に対して、柱状部材211およびセンサ駆動部215の強度を補強する効果を有する。
鍵側負荷部120は、摺動面形成部121を含む。この例では、摺動面形成部121は、内部に柱状部材211が移動可能な空間SPを形成する。空間SPの上方において摺動面FSが形成され、空間SPの下方においてガイド面GSが形成される。ガイド面GSには、リブ部213を通過させるためのスリット125が形成されている。少なくとも摺動面FSが形成される領域は、ゴム等の弾性体で形成されている。なお、柱状部材211は、摺動面FSを形成する弾性体と比べて弾性変形しにくい部材(例えば、剛性の高い樹脂等)で形成されている。
図4においては、鍵100がレスト位置にある場合の柱状部材211の位置を示している。押鍵のときには、摺動面FSから柱状部材211に対して力が加えられる。すなわち、柱状部材211は、鍵100からの力が伝達される力点となる。柱状部材211に伝達された力は、錘部230を上方に移動させるようにハンマアセンブリ200を回動させる。このとき、柱状部材211は摺動面FSに押しつけられる。そして、柱状部材211は、摺動面FSと接触しつつ、空間SPを矢印D1の方向に移動する。すなわち、柱状部材211は摺動面FSと摺動する。
このとき、負荷発生部全体としては、押鍵に伴い下方に移動し、センサ駆動部215が上方からセンサ300を変形させる。この例では、摺動面FSのうち、鍵100がレスト位置からエンド位置に回動することによって柱状部材211が移動する範囲に、段差部1231が配置されている。すなわち、段差部1231は、初期位置(鍵100がレスト位置にあるときの柱状部材211の位置)から移動する柱状部材211によって乗り越えられる。乗り越えるときに変化する負荷は鍵100に伝達されて押鍵する指に伝達される。また、ガイド面GSのうち段差部1231に対向する部分には、凹部1233が形成されている。凹部1233の存在により、柱状部材211が段差部1231を乗り越えて移動しやすくなる。一方、離鍵のときには、錘部230が落下することによりハンマアセンブリ200が回動し、その結果、柱状部材211から摺動面FSに対して力が加えられ、矢印D1とは反対の方向に移動する。
[鍵盤アセンブリの動作]
図5は、第1実施形態における鍵(白鍵)を押下したときの鍵アセンブリの動作を説明する図である。図5(A)は、鍵100がレスト位置(押鍵していない状態)にある場合の図である。図5(B)は、鍵100がエンド位置(最後まで押鍵した状態)にある場合の図である。鍵100が押下されると、回動部185、詳細には棒状可撓性部材1850が回動中心となって曲がる。これによって鍵100がピッチ方向に回動するようになる。そして、鍵側負荷部120がハンマ側負荷部210を押し下げることで、ハンマアセンブリ200が回動軸520を中心に回動する。ハンマアセンブリ200が上側ストッパ430に衝突することによって、ハンマアセンブリ200の回動が止まり、鍵100がエンド位置に達する。また、センサ300がハンマ側負荷部210によって変形すると、センサ300は、変形した量(押鍵量)に応じた複数の段階で、検出信号を出力する。
図5は、第1実施形態における鍵(白鍵)を押下したときの鍵アセンブリの動作を説明する図である。図5(A)は、鍵100がレスト位置(押鍵していない状態)にある場合の図である。図5(B)は、鍵100がエンド位置(最後まで押鍵した状態)にある場合の図である。鍵100が押下されると、回動部185、詳細には棒状可撓性部材1850が回動中心となって曲がる。これによって鍵100がピッチ方向に回動するようになる。そして、鍵側負荷部120がハンマ側負荷部210を押し下げることで、ハンマアセンブリ200が回動軸520を中心に回動する。ハンマアセンブリ200が上側ストッパ430に衝突することによって、ハンマアセンブリ200の回動が止まり、鍵100がエンド位置に達する。また、センサ300がハンマ側負荷部210によって変形すると、センサ300は、変形した量(押鍵量)に応じた複数の段階で、検出信号を出力する。
一方、離鍵すると、錘部230が下方に移動して、ハンマアセンブリ200が回動し、鍵100が上方に回動する。ハンマアセンブリ200が下側ストッパ410に接触することで、ハンマアセンブリ200の回動が止まり、鍵100がレスト位置に戻る。
[ハンマアセンブリの構成]
続いて、押鍵および離鍵によって回動するハンマアセンブリ200について、詳細構成を説明する。
続いて、押鍵および離鍵によって回動するハンマアセンブリ200について、詳細構成を説明する。
図6は、第1実施形態におけるハンマアセンブリの構造を説明する図である。図6(A)は、ハンマアセンブリ200を側面から見た図である。図6(B)は、ハンマアセンブリ200を上方から見た図(図6(A)に示す方向Dbに沿って見た図)である。図6(C)は、ハンマアセンブリ200を後方側から見た図(図6(A)に示す方向Dcに沿って見た図)である。ハンマアセンブリ200は、上述したように、ハンマ側負荷部210とハンマ本体部250と錘部230とを備える。ハンマ本体部250は、第1平板部255(板状領域)と第2平板部259とを備える。
第1平板部255と第2平板部259とは回動軸520から離れる方向に拡がっている平板構造を有する。この例では、第1平板部255は、回動軸520とは概ね直交している関係ではあるが、直交してはいない。すなわち、回動軸520の方向を法線に持つ面であって、鍵100からの力が伝達される力点となる柱状部材211(軸受部220の中心であってもよい)を通過する回動面(以下、アセンブリ中心面Prという)に対して、第1平板部255は平行ではなく、わずかに傾いている。この例では、第1平板部255は、第2平板部259が接続する部分の近傍(回動軸520に近い側)においてアセンブリ中心面Prから離れ、回動軸520から離れるにしたがってアセンブリ中心面Prに近づく構成となっている(より詳細には、図7参照)。なお、第1平板部255はアセンブリ中心面Prに平行であってもよい。また、第1平板部255と第2平板部259とは平行の関係ではないが、平行の関係であってもよい。すなわち、第1平板部255は、回動軸に対して交差する面に沿った領域を少なくとも含んでいる。
第2平板部259には、リブ259aが接続されている。リブ259aは第2平板部259から回動軸520に沿った方向に突出している。リブ259aによって第2平板部259の強度が向上する。第2平板部259の下方には、回動軸520と接触する軸受部220および軸支持部225が接続されている。軸受部220は、略半円柱形状の回動軸520のうち円柱部分の表面に沿った形状を有する構造体であり、回動軸520と摺動する。すなわち、軸受部220の内側の面の中心軸と、回動軸520の中心軸とは略同一であって、回動中心Cとなる。
軸支持部225は、回動軸520のうち円柱の中心軸近傍に接触する平板状の構造体である。この構造によって、ハンマアセンブリ200は、回動軸520を回動中心Cとして回動する。なお、軸支持部225は、平板状の可撓性部材であり、第2平板部259に対して近づいたり離れたりすることができる先端部分を有する。この先端部分は、ハンマアセンブリ200が回動しているときには回動軸520と接触した状態を維持する。一方、軸支持部225を曲げることによって先端部分を第2平板部259の方に移動させると、回動軸520から軸受部220を離すことが可能となる。その結果、ハンマアセンブリ200を回動軸520から取り外すこともできる。
第2平板部259の後方側には、第1平板部255が接続されている。一方、第2平板部259の前方側には、ハンマ側負荷部210が接続されている。このように、第1平板部255とハンマ側負荷部210とは、第2平板部259を介して反対側に配置されている。第2平板部259の下方にハンマアセンブリ200の回動中心があるため、ハンマ側負荷部210と第1平板部255とは回動中心に対して反対側に移動する。
第1平板部255に沿って錘部230が配置されている。この例では、第1平板部255に対して、スケール方向の低音側に錘部230が配置されている。錘部230は、回動中心Cに近いほど厚くなっている。第1平板部255と錘部230とは、この例では接着剤で固定されている。なお、ネジまたはリベット等の締結部材で固定されてもよい。すなわち、錘部230は、第1平板部255に対して取付部材(接着剤または締結部材)によって取り付けられている。
第1平板部255には、回動中心Cから離れた領域において、上方側壁部251と下方側壁部253とが接続されている。上方側壁部251および下方側壁部253は、錘部230の外周側(回動中心から遠い側)を挟んで支持する。上方側壁部251は、第1平板部255の上端側から略垂直方向に延びて錘部230の側部を覆う。この側部は、錘部230の側面のうち、回動方向の上方側の面の一部(側面230c1)である(図8~10参照)。下方側壁部253は、第1平板部255の下端側から略垂直方向に延びて錘部230の側部を覆う。この側部は、錘部230の側面のうち、回動方向の下方側の面の一部(側面230c3)である(図8~10参照)。下方側壁部253は、上方側壁部251よりも短くなっているが、同じであってもよい。
この例では、上方側壁部251には、下方側壁部253の方向に突出するリブが配置されている。下方側壁部253には、上方側壁部251の方向に突出するリブが配置されている。このリブの詳細は、図7を用いて後述する。錘部230は、これらのリブを介して、上方側壁部251と下方側壁部253とに挟まれている。上方側壁部251の上面側には、回動軸520に対して垂直な方向に沿って上方リブ部2515が配置されている。下方側壁部253の下面側には、回動軸520に対して垂直な方向に沿って下方リブ部2535が配置されている。上方側壁部251および上方リブ部2515は、押鍵時に上側ストッパ430に接触する。下方側壁部253および下方リブ部2535は、離鍵時に下側ストッパ410と接触する。
[ハンマ本体部の構成]
続いて、錘部230を取り外した状態のハンマ本体部250のうち、第1平板部255の近傍の詳細構造を説明する。
続いて、錘部230を取り外した状態のハンマ本体部250のうち、第1平板部255の近傍の詳細構造を説明する。
図7は、第1実施形態におけるハンマ本体部の構造を説明する図である。ハンマ本体部250のうち、錘部230が配置されていた領域以外は、図6に示したものと同様である。したがって、図7においては、ハンマ本体部250のうち、錘部230が配置されていた第1平板部255近傍の構成を示している。図7(A)、(C)は、それぞれ図6(A)、(C)と同様の位置関係でハンマ本体部250を示している。図7(B)は、図6(B)とは反対側(下方側)から見たハンマ本体部250を示している。
第1平板部255において、錘部230が配置される面を錘配置面255aとし、錘配置面255aとは反対側の面を外側面255bという。第1平板部255には、上述したように、錘配置面255a側に、上方側壁部251および下方側壁部253が接続されている。上方側壁部251と下方側壁部253とは対向して配置されている。上方側壁部251と下方側壁部253との間には錘部230が配置されるが、配置される前においては、配置された後よりも上方側壁部251と下方側壁部253との距離が短くなっている。すなわち、錘部230が配置されることによって、上方側壁部251および下方側壁部253はわずかに外側に押し拡げられる。
上方側壁部251および下方側壁部253には、リブが配置されている。図7に示す例では、上方側壁部251は、リブ2517a、2517b、2517c、2517dを備えている。リブ2517a、2517b、2517c、2517dは、下方(下方側壁部253側)に向けて突出し、回動軸に沿った方向に延びている。これらのリブのうち、リブ2517a、2517bは、下方側壁部253と対向する位置に配置されている。下方側壁部253は、リブ2537a、2537bを備えている。リブ2537a、2537bは、上方(上方側壁部251側)に向けて突出し、回動軸に沿った方向に延びている。この例では、リブ2517aとリブ2537aとは対向した位置関係を有するが、リブ2517bとリブ2537bとは対向しない位置関係を有している。なお、双方の位置関係が、いずれも対向する関係であってもよいし、いずれも対向しない関係であってもよい。
[錘部の構成]
続いて、ハンマ本体部250から取り外された錘部230の構成の詳細構造を説明する。
続いて、ハンマ本体部250から取り外された錘部230の構成の詳細構造を説明する。
図8は、第1実施形態における錘部の構造を説明する図である。図9は、第1実施形態における錘部のA-A’断面構造を説明する図である。図10は、第1実施形態における錘部のB-B’断面構造を説明する図である。なお、切断線A-A’は、錘部230の長手方向に沿っている。切断線B-B’は、切断線A-A’に垂直な方向(回動方向)に沿っている。
錘部230において、ハンマ本体部250に取り付けられたときに、第1平板部255に対向する面(接続面)を第1面230a、第1面230aとは反対側の面(露出面)を第2面230b、第1面230aと第2面230bとを接続する面を側面230c1~230c4という。側面230c1は、上方側壁部251に覆われる部分を含む上方側の面である。側面230c2は、回動中心側(手前側)の側面である。側面230c3は、下方側壁部253に覆われる部分を含む下方側の面である。側面230c4は、回動中心とは反対側(外周側、奥側)の側面である。なお、上述したように、第1平板部255に対して、スケール方向の低音側に錘部230が配置されている。したがって、第1面230a(接続面)は高音側を向き第1平板部255に覆われる一方、第2面230b(露出面)は低音側を向いて露出している。
図8に示すように、錘部230を第2面230bの方から見ると、ほぼ長方形の形状を有している。図9に示すように、錘部230は、第1面230a(接続面)と第2面230b(露出面)とが対向する板状部分を含み、回動中心に近いほど厚く、すなわち、第1面230aと第2面230bとの間の回動軸方向に沿った長さ(錘部230の厚さ)Wt(Wt1、Wt2、Wt3)が回動中心に近いほど大きくなっている。Wt1は回動中心側における厚さに対応し、Wt3は外周側における厚さに対応し、Wt2は中央部分の厚さに対応する。したがって、Wt1>Wt2>Wt3の関係になっている。
図9、図10に示すように、第2面230bの面積は第1面230aの面積よりも大きい。このため、この例では、側面230c1、230c2、230c3、230c4は、第1面230aおよび第2面230bに対して垂直ではない。なお、側面230c2と側面230c4については第1面230aおよび第2面230bに対して垂直になっていてもよい。
図10に示すように、錘部230のうち所定の位置における断面であって回動方向に沿った断面(一例として、錘230の長手方向に垂直な断面)を、回動軸に垂直な方向に見ると、その外縁に第1面230a、第2面230b、側面230c1、230c3に対応する部分が現れる。この例では、第1面230aに対応する外縁部分と第2面230bに対応する外縁部分とは平行であり、回動軸方向(図の左右方向)に対して垂直である。なお、これらの外縁部分は平行でなくてもよい。
第1面230aに対応する外縁部分の長さk1は、第2面230bに対応する外縁部分の長さk2よりも小さい(k1<k2)。そのため、断面形状は、第1面230aと第2面230bとを上底および下底とする台形となっている。第1面230aと第2面230bとの距離Wtとしたとき、各面から0.5Wtとなる位置を複数含む線を中央線Wcとする。つまり、中央線Wc上の各位置は、第1面230aまでの距離と第2面230bまでの距離が等しい。この断面で見た場合の錘部230の重心Tは、中央線Wcよりも第2面230b側となる。すなわち、重心Tから第1面230aまでの距離が、重心Tから第2面230bまでの距離よりも長くなる。別な言い方をすれば、錘230の重心Tから第1面230aに向かう線であって、第1面230aに垂直な線の長さは、重心Tから第2面230bに向かう線であって、第2面230bに垂直な線の長さよりも長い。つまり、重心Tから第1面230aまで延びる第1面230aの垂線の長さは、重心Tから第2面230bまで延びる第2面230bの垂線の長さよりも長いのである。なお、図10の断面は、錘部230の所定の位置における断面であって、錘部230の回動方向に沿った断面である。錘部230の重心Tの位置を含む、錘部230の回動方向に沿った断面においては、重心Tは、第1面230aに対応する外縁部分よりも第2面230bに対応する外縁部分に近い位置に位置したものとなる。
[鍵による重心の違い]
ここまでは、一部の鍵100に対応するハンマアセンブリ200の構造(ハンマ本体部250および錘部230)との関係について説明した。この一部の鍵100とは、この例では、Eの音に対応する鍵(以下、Eの鍵という)である。以下、ハンマ本体部250と錘部230との関係が異なる別の鍵(この例では、Cの音に対応する鍵であり、以下Cの鍵という)についても説明する。ここでは、ハンマアセンブリ200の重心位置の違いに関して、Eの鍵(第1の鍵)の場合とCの鍵(第3の鍵)の場合とを比較しながら説明する。
ここまでは、一部の鍵100に対応するハンマアセンブリ200の構造(ハンマ本体部250および錘部230)との関係について説明した。この一部の鍵100とは、この例では、Eの音に対応する鍵(以下、Eの鍵という)である。以下、ハンマ本体部250と錘部230との関係が異なる別の鍵(この例では、Cの音に対応する鍵であり、以下Cの鍵という)についても説明する。ここでは、ハンマアセンブリ200の重心位置の違いに関して、Eの鍵(第1の鍵)の場合とCの鍵(第3の鍵)の場合とを比較しながら説明する。
図11は、第1実施形態における錘部の配置方法によるハンマアセンブリの重心位置の違いを説明する図である。図11は、Cの鍵(C-Key)とEの鍵(E-Key)に対応するハンマアセンブリ200について、図6に示す切断線C-C’に対する断面構造を示している。いずれのハンマアセンブリ200においても、錘部230は第1平板部255に対して接着剤243により固定されている。なお、図6(A)の切断線C-C’の位置は、錘部230の重心Tの位置に対応するものである。つまり、図11(A)及び(B)の断面は、錘部230の重心Tの位置を含む断面であって、錘部230の回動方向に沿った断面である。従って、図11(A)及び(B)においては、錘部230の重心Tは、重心Tから第1面230aまでの距離と重心Tから第2面230bまでの距離とが異なるような位置である。
まず、Eの鍵に対応するハンマアセンブリ200の構造について説明する。第2面230bよりも面積の小さい第1面230aが第1平板部255に面して配置されている。この場合、接続面(第1面230a)よりも露出面(第2面230b)の方に錘部230の重心Tが位置している。アセンブリ中心面Prとは異なる位置に存在する第1平板部255により、Eの鍵に対応するハンマアセンブリ200としての重心TxEは、錘部230の重心Tよりも第1平板部255に近くなるが、アセンブリ中心面Prよりも低音側(露出面側、Cの鍵側)に存在する。なお、図11における重心TxC及びTxEは、図11の断面図における、図12に示す二点鎖線TxC及びTxEの位置を示すものである。つまり、重心TxC及びTxEは、切断線C-C’よりも前方に位置するため、切断線C-C’における断面上には存在しないが、重心TxC及びTxEとアセンブリ中心面Prとの位置関係を示すために、重心TxC及びTxEを図11の断面図上に示すものである。
次に、Cの鍵に対応するハンマアセンブリ200の構造について説明する。この構造では、Eの鍵の場合とは錘部230の向きが逆になっている。すなわち、第1面230aよりも面積の大きい第2面230bが第1平板部255に面して配置されている。そのため、第1面230aが露出面となり、第2面230bが接続面となる。この場合、第1面230a(露出面)よりも第2面230b(接続面)の方に重心Tが位置している。アセンブリ中心面Prとは異なる位置に存在する第1平板部255により、Cの鍵に対応するハンマアセンブリ200としての重心TxCは、錘部230の重心Tよりも第1平板部255に近くなり、アセンブリ中心面Prよりも高音側(接続面側、Eの鍵側)に存在する。この結果、錘部230の重心Tは、アセンブリ中心面Prよりも低音側(露出面側)にあるにもかかわらず、ハンマアセンブリ200としての重心TxCは、アセンブリ中心面Prよりも高音側とすることもできる。
Cの鍵の場合は、Eの鍵の場合とは異なり、面積の大きい第2面230bが第1平板部255側に存在する接続面となる。その結果、重心TxCと重心TxEとを比較すると、重心TxCの方が、第1平板部255により近くなり、この例では、アセンブリ中心面Prにより近くなる。このように、同じ錘部230を用いても、接続面と露出面との関係を入れ替えることで、ハンマアセンブリ200としての重心を調整することができる。
このようにハンマアセンブリ200としての重心を鍵によって異ならせた場合の利点について、図12を用いて説明する。
図12は、第1実施形態における鍵、アセンブリ中心面およびハンマアセンブリの重心の位置関係を説明する図である。図12は、鍵100を上方から見た図であり、アセンブリ中心面Prと重心TxC、TxEを示している。なお、図12においては、重心TxC、TxEは、二点鎖線で示されているが、これは、重心TxC、TxEとハンマアセンブリ中心面Prとの位置関係を説明するために図12に表示されるものである。つまり、二点鎖線TxCは、Cの鍵に対応するハンマアセンブリ200としての重心TxCを通り、Cの鍵に対応するハンマアセンブリのアセンブリ中心面Prに平行な線である。また、二点鎖線TxEは、Eの鍵に対応するハンマアセンブリ200としての重心TxEを通り、Eの鍵に対応するハンマアセンブリのアセンブリ中心面Prに平行な線である。黒鍵の存在により、白鍵の形状は音高によって異なっている。特に、Cの鍵、Eの鍵については、アセンブリ中心面Prに対する対称性が低い。図示しないFの鍵、Bの鍵についても同様である。このような鍵は、押鍵操作のときに、鍵に対する操作位置がアセンブリ中心面Prから離れた位置となる場合が多い。
例えば、操作位置が、Cの鍵であればアセンブリ中心面Prより高音側(Eの鍵側)となることが多く、Eの鍵であればアセンブリ中心面Prより低音側(Cの鍵側)となることが多い。上記のように錘部230を第1平板部255に取り付けることで、鍵毎にハンマアセンブリ200の重心の位置を調整し、各鍵の操作位置にハンマアセンブリ200の重心を近づけることができる。これによって、ハンマアセンブリ200の動作が安定し、タッチ感の向上および耐久性の向上が見込まれる。Dの鍵については特に詳細の説明をしないが、錘部230の形状による重心位置の調整をすることによって、ハンマアセンブリ200の重心とアセンブリ中心面Prとの距離を、Cの鍵の場合およびEの鍵の場合よりも小さくすればよい。このとき、この距離をゼロに近づけるようにして、ハンマアセンブリ200の重心がアセンブリ中心面Prに含まれるようにしてもよい。
上述したハンマアセンブリ200の重心とアセンブリ中心面Prとの位置関係については一例であって、目標とするタッチ感等に応じて、様々な関係に設定することができる。このとき、重心Tの位置が中央ではない錘部230を用いることによって、Cの鍵の場合とEの鍵の場合との関係のように、同じ錘部230を用いつつも第1平板部255(ハンマ本体部250)への取り付け方を異ならせて、アセンブリ中心面Prに対するハンマアセンブリ200の重心の位置を変化させることもできる。
上述した第1実施形態における錘部230は、他にも様々な形状を取り得る。第2実施形態から第5実施形態において、複数の形状を例示する。錘部230を第1平板部255に取り付ける方法は様々であるが、以下の説明では、面積の大きい第2面230b側が接続面となる場合を想定して例示する。
<第2実施形態>
図13は、第2実施形態における錘部の形状を説明する図である。第2実施形態においては、第1実施形態に対して錘部230Aの厚さWtが大きく、第1面230Aaに対応する外縁部分の長さk1と第2面230Abに対応する外縁部分の長さk2との差がさらに大きくなっている。このような形状にすることにより、錘部230Aの重心Tの位置を調整し、ハンマアセンブリ200Aの重心Txの位置をアセンブリ中心面Prにほぼ一致させることができる。なお、k1とk2との比、Wtの長さを調整することによって、重心Tの位置を様々に調整し、その結果として、重心Txの位置を調整することができる。
図13は、第2実施形態における錘部の形状を説明する図である。第2実施形態においては、第1実施形態に対して錘部230Aの厚さWtが大きく、第1面230Aaに対応する外縁部分の長さk1と第2面230Abに対応する外縁部分の長さk2との差がさらに大きくなっている。このような形状にすることにより、錘部230Aの重心Tの位置を調整し、ハンマアセンブリ200Aの重心Txの位置をアセンブリ中心面Prにほぼ一致させることができる。なお、k1とk2との比、Wtの長さを調整することによって、重心Tの位置を様々に調整し、その結果として、重心Txの位置を調整することができる。
<第3実施形態>
図14は、第3実施形態における錘部の形状を説明する図である。第1実施形態では側面230c1、230c3は、略平面形状であったが、複数の平面が接続されたような形状であってもよいし、曲面形状であってもよい。第3実施形態の錘部230Bでは、側面部分が複数の平面が組み合わされて、外側に拡がっている領域を含んでいる例である。この例では、第1面230Baと第2面230Bbとを接続する側面230Bc1(第3面)は、頂部230Bc1p、頂部230Bc1pに対して第1面230Ba側の側面230Bc11、および頂部230Bc1pに対して第2面230Bb側の側面230Bc12を備える。同様に、第1面230Baと第2面230Bbとを接続する側面230Bc3(第3面)は、頂部230Bc3p、頂部230Bc3pに対して第1面230Ba側の側面230Bc31、および頂部230Bc3pに対して第2面230Bb側の側面230Bc32を備える。すなわち、第1面230Baと第2面230Bbとの間の側面230Bc1に対応する外縁部分は、第1面230Baと第2面230Bbから外側に拡がった領域を含むことになる。同様に、第1面230Baと第2面230Bbとの間の側面230Bc3に対応する外縁部分は、第1面230Baと第2面230Bbから外側に拡がった領域を含むことになる。
図14は、第3実施形態における錘部の形状を説明する図である。第1実施形態では側面230c1、230c3は、略平面形状であったが、複数の平面が接続されたような形状であってもよいし、曲面形状であってもよい。第3実施形態の錘部230Bでは、側面部分が複数の平面が組み合わされて、外側に拡がっている領域を含んでいる例である。この例では、第1面230Baと第2面230Bbとを接続する側面230Bc1(第3面)は、頂部230Bc1p、頂部230Bc1pに対して第1面230Ba側の側面230Bc11、および頂部230Bc1pに対して第2面230Bb側の側面230Bc12を備える。同様に、第1面230Baと第2面230Bbとを接続する側面230Bc3(第3面)は、頂部230Bc3p、頂部230Bc3pに対して第1面230Ba側の側面230Bc31、および頂部230Bc3pに対して第2面230Bb側の側面230Bc32を備える。すなわち、第1面230Baと第2面230Bbとの間の側面230Bc1に対応する外縁部分は、第1面230Baと第2面230Bbから外側に拡がった領域を含むことになる。同様に、第1面230Baと第2面230Bbとの間の側面230Bc3に対応する外縁部分は、第1面230Baと第2面230Bbから外側に拡がった領域を含むことになる。
頂部230Bc1pと頂部230Bc3pとを結ぶ面のうち断面に現れる線PLの長さk3は、k1およびk2よりも大きい(k3>k1、k3>k2)。また、k1<k2であるが、k1=k2であってもよい。この例では、第1面230Baから線PLまでの長さWaは、第2面230Bbから線PLまでの長さWbよりも大きい。すなわち、頂部230Bc1p、230Bc3pは、いずれも第1面230Baと第2面230Bbとの中央とは異なる位置に存在する。
図14の例では、ハンマアセンブリ200Bの重心Txは、線PLと一致しているが、必ずしも一致していなくてもよい。このような形状の場合、k1とk2とk3との比、Wtの長さ、WaとWbとの比を調整することによって、重心Tの位置を様々に調整し、その結果として、重心Txの位置を調整することができる。
<第4実施形態>
図15は、第4実施形態における錘部の形状を説明する図である。第1実施形態では側面230c1、230c3は、略平面形状であったが、側面部分が不連続に変化していてもよい。第4実施形態において、錘部230Cは、第1面230Ca側の第1錘部230C1と第2面230Cb側の第2錘部230C2とが結合された形状を有している。第1錘部230C1は長さk1および厚さWaに対応した形状である。第2錘部230C2は長さk2および厚さWbに対応した形状である。このような形状の場合、k1とk2との比、Wtの長さ、WaとWbとの比を調整することによって、重心Tの位置を様々に調整し、その結果として、ハンマアセンブリ200Cの重心Txの位置を調整することができる。なお、第1錘部230C1と第2錘部230C2とが接合される部分の大きさを変化させて重心Tの位置を調整してもよい。
図15は、第4実施形態における錘部の形状を説明する図である。第1実施形態では側面230c1、230c3は、略平面形状であったが、側面部分が不連続に変化していてもよい。第4実施形態において、錘部230Cは、第1面230Ca側の第1錘部230C1と第2面230Cb側の第2錘部230C2とが結合された形状を有している。第1錘部230C1は長さk1および厚さWaに対応した形状である。第2錘部230C2は長さk2および厚さWbに対応した形状である。このような形状の場合、k1とk2との比、Wtの長さ、WaとWbとの比を調整することによって、重心Tの位置を様々に調整し、その結果として、ハンマアセンブリ200Cの重心Txの位置を調整することができる。なお、第1錘部230C1と第2錘部230C2とが接合される部分の大きさを変化させて重心Tの位置を調整してもよい。
<第5実施形態>
図16は、第5実施形態における錘部の形状を説明する図である。第1実施形態では第1面230aと第2面230bとは、回動方向に対する中心が同一になる位置関係になっていたが、回動方向に対する中心がずれていてもよい。第5実施形態における錘部230Dは、第1面230Daの中心Wacと第2面230Dbの中心Wbcとの位置が異なる。この例では、Wbcに対してWacが、下方にずれている。このようにすると、上下方向(回動方向)に対する重心Tの位置を調整することによって、ハンマアセンブリ200Dの重心Txを調整することもできる。
図16は、第5実施形態における錘部の形状を説明する図である。第1実施形態では第1面230aと第2面230bとは、回動方向に対する中心が同一になる位置関係になっていたが、回動方向に対する中心がずれていてもよい。第5実施形態における錘部230Dは、第1面230Daの中心Wacと第2面230Dbの中心Wbcとの位置が異なる。この例では、Wbcに対してWacが、下方にずれている。このようにすると、上下方向(回動方向)に対する重心Tの位置を調整することによって、ハンマアセンブリ200Dの重心Txを調整することもできる。
<第6実施形態>
上述した実施形態では、ハンマ本体部250は、上方側壁部251および下方側壁部253によって錘部を挟み込んでいたが、必ずしも挟み込まれていなくてもよい。第6実施形態では、第2実施形態において、錘部230Aが上方側壁部251および下方側壁部253によって挟み込まれずに第1平板部255Eに接続されているハンマアセンブリ200Eについて説明する。
上述した実施形態では、ハンマ本体部250は、上方側壁部251および下方側壁部253によって錘部を挟み込んでいたが、必ずしも挟み込まれていなくてもよい。第6実施形態では、第2実施形態において、錘部230Aが上方側壁部251および下方側壁部253によって挟み込まれずに第1平板部255Eに接続されているハンマアセンブリ200Eについて説明する。
図17は、第6実施形態における錘部の形状を説明する図である。第2実施形態と比較して、ハンマアセンブリ200Eは、上方側壁部251および下方側壁部253に相当する構成によって錘部230Aが挟まれていない。そのため、第2実施形態と比べて第1平板部255Eの影響が大きく、重心Tに対するハンマアセンブリ200Eの重心Txの位置は、第2実施形態の場合よりも大きく変化する。そのため、第2実施形態ではハンマアセンブリ200Aの重心Txがアセンブリ中心面Prとほぼ一致していたが、第6実施形態ではハンマアセンブリ200Eの重心Txはアセンブリ中心面Prよりも第1平板部255E側に存在することになる。このように、ハンマ本体部の形状によって、さらに重心Txの位置を調整することもできる。
<変形例>
上述した各実施形態は、互いに組み合わせたり、置換したりして適用することが可能である。また、上述した各実施形態では、以下の通り変形して実施することも可能である。
上述した各実施形態は、互いに組み合わせたり、置換したりして適用することが可能である。また、上述した各実施形態では、以下の通り変形して実施することも可能である。
(1)錘部230における第1面230aおよび第2面230bは、連続的な平面形状でなくてもよく、一部に凹凸が形成されたり、第1面230aと第2面230bとを貫通する孔が形成されたりしてもよい。この場合、凹凸等が形成された領域以外を第1面230aおよび第2面230bとしてもよい。
(2)錘部230を第1面230a側から見たときの外形は、長方形ではなく他の形状であってもよい。
(3)錘部230は、1つの材料で形成されていたが、互いに比重の異なる複数の材料を組み合わせて形成されてもよい。例えば、図15に示す第4実施形態の場合に、第1錘部230C1と第2錘部230C2とを異なる材料で形成して貼り合わせることによって、錘部230Cが形成されていてもよい。この組み合わせによって重心Tを変化させることもできる。
(4)ハンマアセンブリ200は、回動軸520に対する錘部230の位置が鍵100の後端側になるように配置されていたが、この位置が鍵100の前端側になるように配置されてもよい。
(5)上述の実施形態のハンマアセンブリ200は、鍵100で駆動される構成としたが、これに限定されない。例えば、他のアクション部材(例えば、アコースティックピアノのアクション機構を構成するジャックまたはサポートなど)によって駆動されるものでもよい。また、ハンマアセンブリの構成として、回動軸支部(例えば、軸受部220)、他の部材(例えば、鍵100)から力を受ける部分、センサ駆動部分(例えば、センサ駆動部215)、および錘(例えば、錘部230)の配置は、上述した実施形態に限定されず、鍵盤構造に合わせて適宜設計されればよい。また、鍵100がセンサ300を直接駆動する場合にはセンサ駆動部分は省略できるなど、本実施形態のハンマアセンブリ200が備える機能全てを必ずしも有する必要はなく、その構成も適宜設計されればよい。
(6)上述の実施形態では、ハンマ本体部250と錘部230とをそれぞれ単一部材で構成するものとしたが、それぞれ複数の部材で構成されるものであってもよい。例えば、ハンマ本体部250の軸受けは、軸受部220に代えて、別部品としてもよい。別部品とする場合、ハンマ本体部250のうち軸受部分を除いた共通の構造体に対して、それぞれ異なる種類の軸受け部品を組み付けてもよい。これによって、容易に、ハンマ本体部の軸受部の構造を異ならせることもできる。
(7)上述した実施形態では、ハンマ本体部250に対して1つの錘部230が取り付けられていたが、複数の錘部230がハンマ本体部250を挟むように取り付けられてもよい。この場合には、複数の錘部230の総和の重心とアセンブリ中心面Prとが異なる位置であってもよい。
1…鍵盤装置、10…鍵盤アセンブリ、70…音源装置、80…スピーカ、90…筐体、100…鍵、100b…黒鍵、100w…白鍵、120…鍵側負荷部、121…摺動面形成部、1231…段差部、1233…凹部、125…スリット、151…前端鍵ガイド、153…側面鍵ガイド、180…接続部、181…板状可撓性部材、183…第1支持部、185…回動部、1850…棒状可撓性部材、1851…鍵側支持部、1852…フレーム側支持部、200,200A,200B,200C,200D,200E…ハンマアセンブリ、210…ハンマ側負荷部、211…柱状部材、213…リブ部、215…センサ駆動部、220…軸受部、225…軸支持部、230,230A,230B,230C,230D…錘部、230a,230Aa,230Ba,230Ca,230Da…第1面、230b,230Ab,230Bb,230Cb,230Db…第2面、230c1,230c2,230c3,230c4,230Bc1,230Bc11,230Bc12,230Bc3,230Bc31,230Bc32…側面、230Bc1p,230Bc3p…頂部、230C1…第1錘部、230C2…第2錘部、243…接着剤、250…ハンマ本体部、251…上方側壁部、253…下方側壁部、255…第1平板部、255a…錘配置面、255b…外側面、255E…第1平板部、259…第2平板部、259a…リブ、300…センサ、410…下側ストッパ、430…上側ストッパ、500…フレーム、511…前端フレームガイド、513…側面フレームガイド、520…回動軸、585…第2支持部、710…信号変換部、730…音源部、750…出力部、2515…上方リブ部、2535…下方リブ部、2517a,2517b,2517c,2517d,2537a,2537b…リブ
Claims (11)
- 回動軸を中心に回動するハンマ本体部と、
前記ハンマ本体部の一部の領域に面する接続面と当該接続面と反対側の露出面を含む錘部と、を備え、
回動軸に垂直な方向に見た場合の前記錘部の重心は、当該重心から前記接続面までの距離と、当該重心から前記露出面までの距離とが異なる位置であるハンマアセンブリ。 - 回動軸を中心に回動するハンマ本体部と、
前記ハンマ本体部の一部の領域に面する接続面と当該接続面と反対側の露出面を含む錘部と、を備え、
前記錘部は、所定の位置における回動方向に沿った断面の外縁のうち、前記接続面に対応する部分の大きさと前記露出面に対応する部分の大きさとが異なる形状を有するハンマアセンブリ。 - 前記錘部は、前記接続面と前記露出面とが対向する板状部分を含む請求項1または2に記載のハンマアセンブリ。
- 前記錘部は、前記ハンマ本体部に対して取付部材によって取り付けられている請求項1乃至3のいずれかの項に記載のハンマアセンブリ。
- 前記錘部は、所定の位置における回動方向に沿った断面の外縁のうち、前記接続面と前記露出面との間に対応する部分は、当該接続面および当該露出面から外側に拡がった領域を含む請求項1乃至請求項4のいずれかに記載のハンマアセンブリ。
- 前記外側に拡がった領域の頂部は、前記接続面と前記露出面との中央とは異なる位置である請求項5に記載のハンマアセンブリ。
- 前記ハンマ本体部は、鍵からの力が伝達される力点を含み、
前記力点を通り前記回動軸に垂直なアセンブリ中心面と、前記錘部の重心とは異なる位置である請求項1乃至請求項6のいずれかに記載のハンマアセンブリ。 - 前記錘部は、1つの鍵に対して複数であり、
前記ハンマ本体部は、前記1つの鍵からの力が伝達される力点を含み、
前記力点を通り前記回動軸に垂直なアセンブリ中心面と、複数の複数の錘部の総和の重心とは異なる位置である請求項1乃至請求項6のいずれかに記載のハンマアセンブリ。 - フレームに対して回動可能に配置された複数の鍵と、
前記複数の鍵に対応してそれぞれ配置された請求項1乃至請求項6のいずれかに記載の前記ハンマアセンブリとしての複数のハンマアセンブリと、を備え、
前記ハンマ本体部の前記回動軸は、前記フレームに対する位置が固定され、
前記鍵の回動に応じて、当該鍵に対応する前記ハンマアセンブリが前記回動軸を中心に回動する鍵盤装置。 - 前記複数の鍵は、第1の鍵および第2の鍵を含み、
前記ハンマ本体部は、前記鍵からの力が伝達される力点を含み、
前記力点を通り前記回動軸に垂直なアセンブリ中心面を基準とした前記錘部の重心の位置は、前記第1の鍵の場合と前記第2の鍵の場合とでは異なる請求項9に記載の鍵盤装置。 - 前記第1の鍵に対応する前記ハンマアセンブリの重心の位置は、当該第1の鍵に対応する前記アセンブリ中心面よりも前記第2の鍵の側であり、
前記第2の鍵に対応する前記ハンマアセンブリの重心の位置は、当該第2の鍵に対応する前記アセンブリ中心面よりも前記第1の鍵の側である請求項10に記載の鍵盤装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017058737A JP2018163191A (ja) | 2017-03-24 | 2017-03-24 | ハンマアセンブリおよび鍵盤装置 |
| JP2017-058737 | 2017-03-24 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018174261A1 true WO2018174261A1 (ja) | 2018-09-27 |
Family
ID=63584563
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/011833 WO2018174261A1 (ja) | 2017-03-24 | 2018-03-23 | ハンマアセンブリおよび鍵盤装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2018163191A (ja) |
| WO (1) | WO2018174261A1 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11265177A (ja) * | 1998-03-16 | 1999-09-28 | Casio Comput Co Ltd | 鍵盤装置 |
| JP2000187487A (ja) * | 1998-12-22 | 2000-07-04 | Kawai Musical Instr Mfg Co Ltd | 電子鍵盤楽器のハンマー |
| JP2003186475A (ja) * | 2001-12-20 | 2003-07-04 | Casio Comput Co Ltd | 鍵盤装置 |
| JP2004341326A (ja) * | 2003-05-16 | 2004-12-02 | Roland Corp | シャーシ |
| JP2015087591A (ja) * | 2013-10-31 | 2015-05-07 | 株式会社河合楽器製作所 | 鍵盤楽器のハンマー装置 |
-
2017
- 2017-03-24 JP JP2017058737A patent/JP2018163191A/ja active Pending
-
2018
- 2018-03-23 WO PCT/JP2018/011833 patent/WO2018174261A1/ja active Application Filing
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11265177A (ja) * | 1998-03-16 | 1999-09-28 | Casio Comput Co Ltd | 鍵盤装置 |
| JP2000187487A (ja) * | 1998-12-22 | 2000-07-04 | Kawai Musical Instr Mfg Co Ltd | 電子鍵盤楽器のハンマー |
| JP2003186475A (ja) * | 2001-12-20 | 2003-07-04 | Casio Comput Co Ltd | 鍵盤装置 |
| JP2004341326A (ja) * | 2003-05-16 | 2004-12-02 | Roland Corp | シャーシ |
| JP2015087591A (ja) * | 2013-10-31 | 2015-05-07 | 株式会社河合楽器製作所 | 鍵盤楽器のハンマー装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018163191A (ja) | 2018-10-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6780768B2 (ja) | 鍵盤装置 | |
| JP6682945B2 (ja) | 回動機構および鍵盤装置 | |
| US10885884B2 (en) | Pivot member and keyboard apparatus | |
| JP6682944B2 (ja) | 鍵盤装置及び電子鍵盤楽器 | |
| WO2018174001A1 (ja) | 回動機構および回動機構が備えられた鍵盤装置 | |
| JP6747240B2 (ja) | 鍵盤装置 | |
| WO2017164232A1 (ja) | 鍵盤装置 | |
| WO2018174261A1 (ja) | ハンマアセンブリおよび鍵盤装置 | |
| WO2018174161A1 (ja) | ハンマアセンブリ、鍵盤楽器およびハンマ | |
| JP6834660B2 (ja) | ハンマアセンブリおよび鍵盤楽器 | |
| JP6187520B2 (ja) | サポートアセンブリおよび鍵盤装置 | |
| WO2018173926A1 (ja) | 回動部材および鍵盤装置 | |
| JP6834666B2 (ja) | 識別子を有する回動部材、および鍵盤装置 | |
| JP6707942B2 (ja) | 回動機構および鍵盤装置 | |
| JP6464867B2 (ja) | サポートアセンブリおよび鍵盤装置 | |
| JP7559928B2 (ja) | 鍵盤装置 | |
| JP6464868B2 (ja) | サポートアセンブリおよび鍵盤装置 | |
| JP2018163270A (ja) | 回動部材および鍵盤装置 | |
| JPWO2017065262A1 (ja) | 鍵盤装置 | |
| JP2016184025A (ja) | サポートアセンブリおよび鍵盤装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18771918 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 18771918 Country of ref document: EP Kind code of ref document: A1 |