WO2018066070A1 - 電力変換装置及び電力変換方法 - Google Patents
電力変換装置及び電力変換方法 Download PDFInfo
- Publication number
- WO2018066070A1 WO2018066070A1 PCT/JP2016/079504 JP2016079504W WO2018066070A1 WO 2018066070 A1 WO2018066070 A1 WO 2018066070A1 JP 2016079504 W JP2016079504 W JP 2016079504W WO 2018066070 A1 WO2018066070 A1 WO 2018066070A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- power
- power system
- disturbance
- maximum
- voltage
- Prior art date
Links
- 238000006243 chemical reaction Methods 0.000 title claims abstract description 61
- 238000000034 method Methods 0.000 title claims description 63
- 238000001514 detection method Methods 0.000 claims abstract description 33
- 230000008569 process Effects 0.000 claims description 43
- 238000010248 power generation Methods 0.000 description 23
- 238000010586 diagram Methods 0.000 description 18
- 230000008859 change Effects 0.000 description 8
- 239000003990 capacitor Substances 0.000 description 5
- 230000009194 climbing Effects 0.000 description 5
- 230000000052 comparative effect Effects 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- 230000000873 masking effect Effects 0.000 description 5
- 230000000694 effects Effects 0.000 description 3
- 230000033228 biological regulation Effects 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- NAWXUBYGYWOOIX-SFHVURJKSA-N (2s)-2-[[4-[2-(2,4-diaminoquinazolin-6-yl)ethyl]benzoyl]amino]-4-methylidenepentanedioic acid Chemical compound C1=CC2=NC(N)=NC(N)=C2C=C1CCC1=CC=C(C(=O)N[C@@H](CC(=C)C(O)=O)C(O)=O)C=C1 NAWXUBYGYWOOIX-SFHVURJKSA-N 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 231100000989 no adverse effect Toxicity 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
Images







Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M7/00—Conversion of AC power input into DC power output; Conversion of DC power input into AC power output
- H02M7/42—Conversion of DC power input into AC power output without possibility of reversal
- H02M7/44—Conversion of DC power input into AC power output without possibility of reversal by static converters
- H02M7/48—Conversion of DC power input into AC power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode
Definitions
- the present invention relates to a power conversion device and a power conversion method for performing power conversion.
- the power conditioner has a protection function that disconnects the distributed power supply from the power system when a disturbance (such as an instantaneous voltage drop or three-phase unbalance) occurs in the power system. If they are disconnected all at once, a large-scale power outage may occur. Accordingly, the grid interconnection regulations (Grid Code) stipulate that an FRT function (Fault Ride Through) that continues the operation of the power conditioner during the disturbance of the power system should be provided. As a technique related to such an FRT function, for example, a technique described in Patent Document 1 is known.
- Patent Document 1 describes that “a corrected phase change component obtained by removing a noise component from a phase change component of a system power supply voltage is obtained, and then the disturbance determination of the AC power system is performed based on an FRT determination index”. ing.
- Patent Document 1 does not describe a technique for solving such a problem. In order to comply with the above-mentioned grid interconnection regulations, a highly reliable power converter is required.
- an object of the present invention is to provide a highly reliable power conversion device and the like.
- a power conversion device converts power generated by a distributed power source into AC power, outputs the AC power to a power system, and converts the power to the voltage of the power system.
- the power conversion circuit Based on a disturbance detection unit that detects the presence or absence of disturbance in the power system, and a current command value that is a command value of a current output to the power system via the power conversion circuit, the power conversion circuit A masking process for setting the effective value of the current command value to a value smaller than the normal time of the power system for a first predetermined time after the disturbance of the power system is detected by the control unit and the disturbance detection unit. And a mask processing unit for executing the above.
- a highly reliable power conversion device or the like can be provided.
- the amplitude V 1 of the positive-phase voltage v 1 at the time of disturbance occurs in the power system the amplitude V 2 of the negative-phase voltage v 2, and an explanatory view showing a change in current command value i M * is there.
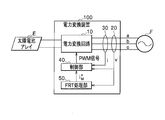
- FIG. 1 is a configuration diagram including a power conversion device 100 according to the first embodiment.
- the power converter 100 is a power conditioner (PCS) that converts the generated power of the solar cell array E (distributed power source) into AC power and outputs the AC power to the power system F.
- PCS power conditioner
- the power conversion device 100 includes a power conversion circuit 10, a voltage detector 20, a current detector 30, a control unit 40, and an FRT processing unit 50.
- the power conversion circuit 10 is a three-phase inverter that converts the generated power (that is, DC power) of the solar cell array E into AC power and outputs this AC power to the power system F.
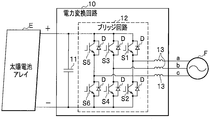
- FIG. 2 is a configuration diagram including the power conversion circuit 10 of the power conversion device 100.
- the voltage detector 20 and the current detector 30 are not shown.
- the power conversion circuit 10 includes a capacitor 11, a bridge circuit 12, and a reactor 13.
- the capacitor 11 is an element that smoothes the voltage on the DC side of the bridge circuit 12, and the positive and negative electrodes are connected to the solar cell array E.
- a configuration in which a plurality of capacitors (not shown) are connected in series may be used.
- the bridge circuit 12 has a configuration in which a first leg including switching elements S1 and S2, a second leg including switching elements S3 and S4, and a third leg including switching elements S5 and S6 are connected in parallel. Yes.
- switching elements S1 to S6 for example, an IGBT (Insulated Gate Bipolar Transistor) can be used.
- a connection point between a switching element S 1 having a collector connected to the positive electrode of the capacitor 11 and a switching element S 2 having an emitter connected to the negative electrode of the capacitor 11 is connected via an a-phase reactor 13. It is connected to the electric power system F (the same applies to the b phase and the c phase).
- a free wheel diode D is connected in antiparallel to each of the switching elements S1 to S6. Then, when a predetermined PWM signal (Pulse Width Modulation) is output from the control unit 40 (see FIG. 1) to the gates of the switching elements S1 to S6, the switching elements S1 to S6 are switched on / off. ing.
- PWM signal Pulse Width Modulation
- the reactor 13 removes switching noise of the switching elements S1 to S6, and is installed in each of the three-phase wirings on the power system F side.
- a voltage detector 20 shown in FIG. 1 is a sensor that detects a voltage v (for example, a phase, b phase, and c phase line voltage) of the power system F. The detection value of the voltage detector 20 is output to the control unit 40 and the FRT processing unit 50.
- a current detector 30 shown in FIG. 1 is a sensor that detects a current i (currents of a phase, b phase, and c phase) of the power system F. The detection value of the current detector 30 is output to the control unit 40.
- the control unit 40 shown in FIG. 1 is configured to include electronic circuits such as a CPU (Central Processing Unit), a ROM (Read Only Memory), a RAM (Random Access Memory), and various interfaces (not shown). Then, the program stored in the ROM is read out and expanded in the RAM, and the CPU executes various processes.
- a CPU Central Processing Unit
- ROM Read Only Memory
- RAM Random Access Memory
- the control unit 40 controls the power conversion circuit 10 based on the current command value i M * input from the FRT processing unit 50 (control processing). That is, the control unit 40 controls on / off of the switching elements S1 to S6 (see FIG. 2) based on the current command value i M * .
- the above-described current command value i M * is a command value of a current output to the power grid F via the power conversion circuit 10.
- FIG. 3 is a functional block diagram of the control unit 40 included in the power conversion device 100.
- the control unit 40 includes a phase angle specifying unit 41, a three-phase two-axis conversion unit 42, a subtractor 43, a PI control unit 44 (Proportional Integral Controller), and a two-axis three-phase conversion unit. 45 and a PWM signal generation unit 46.
- the phase angle specifying unit 41 specifies the phase angle of the voltage v detected by the voltage detector 20.
- the three-phase two-axis conversion unit 42 receives the three-phase (a-phase / b-phase / c-phase) current i detected by the current detector 30 (see FIG. 1) from the phase angle specifying unit 41. Is converted into current values of the d-axis and the q-axis, which is a rotating coordinate system.
- the subtractor 43 includes a current command value i M * (current command value in the rotating coordinate system) input from the FRT processing unit 50 (see FIG. 1), and a current value input from the three-phase two-axis conversion unit 42. The difference between is calculated.
- the PI control unit 44 calculates the voltage command values for the d-axis and the q-axis so that the current i approaches the current command value i M * based on the PI control.
- the biaxial / three-phase converting unit 45 converts the d-axis / q-axis voltage command values input from the PI control unit 44 based on the phase angle input from the phase angle specifying unit 41 to the a-phase / b-phase / c phase. Convert to phase three-phase coordinate system.
- the PWM signal generation unit 46 generates a PWM signal based on the voltage command value of the three-phase coordinate system input from the two-axis three-phase conversion unit 45, and uses this PWM signal for the switching elements S1 to S6 (see FIG. 2). Output to the gate. Thereby, the DC power input from the solar cell array E (see FIG. 1) is converted into predetermined AC power in the power conversion device 100.
- the FRT processing unit 50 shown in FIG. 1 has a function of continuing power conversion even when the power system F is disturbed.
- the “disturbance” of the power system F means an instantaneous drop in the voltage of the power system F, a three-phase unbalanced state, or the like.
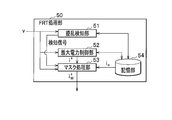
- FIG. 4 is a functional block diagram of the FRT processing unit 50 included in the power conversion device 100.
- the FRT processing unit 50 is configured to include electronic circuits such as a CPU, a ROM, a RAM, and various interfaces.
- the FRT processing unit 50 reads out a program stored in the ROM, develops it in the RAM, and the CPU executes various processes. It is like that.
- the FRT processing unit 50 includes a disturbance detection unit 51, a maximum power control unit 52, a mask processing unit 53, and a storage unit 54.
- the disturbance detection unit 51 detects the presence or absence of a disturbance in the power system F using the following equation (1) based on the voltage v of the power system F detected by the voltage detector 20 (see FIG. 1) (disturbance). Detection process).
- the predetermined value Vnormal is a value on the left side of the equation (1) when the power system F is normal.
- k is a predetermined value smaller than 1.
- the disturbance detection unit 51 determines that “the electric power system F has disturbance”. That is, the disturbance detection unit 51 detects a disturbance in the power system F. Then, when Formula (1) stops being materialized, the disturbance detection part 51 determines with "the electric power system F has no disturbance.” That is, the disturbance detection unit 51 detects that the disturbance of the power system F has been lost (returned to normal). The determination process by the disturbance detection unit 51 is repeated at a predetermined cycle.
- the storage unit 54 stores the detection values of the voltage detector 20 and the current detector 30 (see FIG. 1) in association with the time.
- a current command value predetermined value i 0 ) used in “mask processing” described later is stored in the storage unit 54 in advance.
- the maximum power control unit 52 calculates the current command value i * based on the detection value (voltage v) of the voltage detector 20 so that the maximum active power is supplied to the power system F. Such processing is called “maximum power control”. More specifically, the maximum power control unit 52 performs the “masking process” immediately after the disturbance detection unit 51 detects the disturbance of the power system F, and the maximum power control unit 52 immediately after it is detected that the disturbance of the power system F has disappeared. “Maximum power control” is executed during a period between the “mask processing” of the first step.
- mask processing means that the current command value i * calculated by the maximum power control unit 52 is intentionally ignored, and the effective value of the current command value i M * is smaller than the normal value of the power system F ( This is a process of setting to a predetermined value i 0 ).
- the mask processing unit 53 performs the above-described “mask processing” immediately after the disturbance detection unit 51 detects the disturbance of the power system F or immediately after it is detected that the disturbance of the power system F has disappeared.
- the significance of performing the “mask process” will be briefly described.
- the voltage v of the power grid F includes a normal phase voltage v 1 and a reverse phase voltage v 2 as shown in the following equation (2).
- the positive-phase voltage v 1 shown in formula (2) is a positive phase component of the voltage v of the power system F. That is, the positive phase voltage v 1 is a symmetrical three-phase voltage that rotates in the same direction as the AC voltage of the power system F in the normal state.
- V 1 is the amplitude of the positive phase voltage v 1
- ⁇ 1 is the phase of the positive phase voltage v 1
- ⁇ is the angular frequency of the voltage v of the power system F.
- the inverse-phase voltage v 2 shown in equation (2) is a reverse-phase component of the voltage v of the power system F.
- reverse-phase voltage v 2 is the AC voltage of the power system F in a normal which is the voltage of the symmetrical three-phase to phase rotation in the opposite direction.
- V 2 is the amplitude of the negative phase voltage v 2
- ⁇ 2 is the phase of the negative phase voltage v 2 .
- a reverse-phase voltage v 2 is substantially zero, the voltage v of the power system F is made substantially equal to the positive-phase voltage v 1.
- the FRT processing unit 50 illustrated in FIG. 4 performs a moving average integration calculation represented by the following equations (3) and (4) in order to suppress the influence of harmonics and the like. That, FRT processing unit 50, based on the equation (3), to calculate the moving average V 1 cal positive-phase voltage v 1, based on equation (4), a moving average V 2Cal reverse-phase voltage v 2 calculate.
- the moving average V 1 cal is used as an approximation of the amplitude V 1 of the positive-phase voltage v 1
- moving average V 2Cal is used as an approximation of the amplitude V 2 of the negative-phase voltage v 2.
- the moving average integration calculation of the equations (3) and (4) is performed every moment over one period of the angular frequency 2 ⁇ (that is, half a period of the voltage v of the power system F). Therefore, power from the disturbance is detected strains F, until the time of the half period of at least voltage v has elapsed, moving average V 1 cal, the value of V 2Cal is often not stable.
- V 2Cal the value of V 2Cal is may not be stable Many.
- the predetermined operation time voltage v new moving average V 1 cal-moving average V 2Cal corresponding to it is calculated Half cycle.
- moving average V 1 cal does not match the amplitude V 1 of the positive-phase voltage v 1, also moving average V 2Cal reverse-phase voltage v 2 of it does not match the amplitude V 2.
- moving average V 2Cal reverse-phase voltage v 2 of it does not match the amplitude V 2.
- V 2Cal is, as it when it is reflected on the control of the power converter 100, the output current i of the power system F may become excessive. Therefore, in the present embodiment, “mask processing” is performed so that an overcurrent does not flow immediately after the state of the power system F changes from one of normal / disturbance to the other.
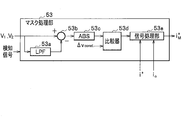
- FIG. 5 is a functional block diagram of the mask processing unit 53.
- the mask processing unit 53 includes a low-pass filter 53a, a subtractor 53b, an absolute value circuit 53c (Absolute value circuit: ABS), a comparator 53d, and a signal processing unit 53e. Yes.
- the mask processing unit 53 other detection signal indicating the presence or absence of a disturbance in the power system F, the amplitude V 1 of the positive-phase voltage v 1 of the power system F, and the amplitude V 2 of the negative-phase voltage v 2 is input.
- moving average V 1 cal it is used in the equation (3)
- moving average V 2Cal of the equation (4) is used as an approximate value of the amplitude V 2Cal of the equation (4).
- the low pass filter 53a shown in FIG. 5 is a filter that extracts a low frequency component included in the amplitudes V 1 and V 2 and removes the high frequency component.
- Subtractor 53b has a function of subtracting the output value of the low-pass filter 53a from the amplitude V 1 of the positive-phase voltage v 1 (corresponding to the amplitude V 1). Further, the subtractor 53b also has a function of subtracting the output value of the low-pass filter 53a (corresponding to the amplitude V 2) from the amplitude V 2 of the negative-phase voltage v 2.
- the absolute value circuit 53c is a circuit that takes the absolute value of the value input from the subtractor 53b. In the absolute value circuit 53c, the positive-phase voltage v 1 of the fluctuation width of the amplitude V 1, and, the fluctuation width of the amplitude V 2 of the negative-phase voltage v 2 at the predetermined time is calculated at a given time.
- the comparator 53d is a circuit that compares the amplitudes of the amplitudes V 1 and V 2 input from the absolute value circuit 53c and the predetermined value ⁇ v const with respect to the amplitudes V 1 and V 2 .
- the predetermined value ⁇ v const is a threshold value that serves as a criterion for determining whether or not the voltage v of the power system F is stable (for example, even if it is a three-phase imbalance). Are set in advance.
- the signal processing unit 53e has a function of outputting a predetermined current command value i M * to the control unit 40 (see FIG. 1) based on the comparison result of the comparator 53d. That is, the signal processing section 53e, a current command value calculated by the maximum power control unit 52 (see FIG. 4) i *, and the storage unit 54 to one of the predetermined value i 0 stored in (see FIG. 4) The selection is made based on the comparison result of the comparator 53d. Then, the signal processing unit 53e outputs the selected value as the current command value i M * to the control unit 40 (see FIG. 1). The processing executed by the signal processing unit 53e will be described later.
- FIG. 6 is a flowchart of processing executed by the FRT processing unit 50 of the power conversion apparatus 100 (see FIG. 4 as appropriate). It is assumed that no disturbance has occurred in the power system F during “START” in FIG. In step S101, the FRT processing unit 50 performs normal control.
- the “normal control” is control performed when the power system F is normal. Examples of such “normal control” include “mountain climbing method”.
- the “mountain climbing method” is a method for specifying the generated power near the maximum point in the PV characteristics (power-voltage characteristics: curve g1 shown in FIG. 9A) of the solar cell array E. More specifically, the FRT processing unit 50 moves the operating point in the PV characteristics of the solar cell array E so that the generated power after the movement exceeds the generated power before the movement. As a result, an operating point near the maximum point of the PV characteristic is specified.
- step S102 the FRT processing unit 50 determines whether or not the disturbance of the power system F is detected by the disturbance detection unit 51 based on the above equation (1).
- the FRT processing unit 50 continues the normal control in step S101 ("RETURN").
- the process of the FRT processing unit 50 proceeds to step S103.
- step S ⁇ b> 103 the FRT processing unit 50 performs “mask processing” by the mask processing unit 53. That is, the FRT processing unit 50 sets the effective value of the current command value i M * to a predetermined value i 0 that is smaller than that when the power system F is normal.
- the predetermined value i 0 is a current command value for suppressing a transient fluctuation of the current i of the power system F, and is stored in the storage unit 54 (see FIG. 4) as a relatively small value.
- the predetermined value i 0 is set to 0 [A].
- FRT processing unit in step S104 50 are positive-phase voltage v 1 of the fluctuation width of the amplitude V 1, and the fluctuation width of the amplitude V 2 of the negative-phase voltage v 2 is equal to or less than a predetermined value Delta] v const .
- Step fluctuation width of the amplitude V 1 at S104 is less than a predetermined value Delta] v const, and, when the fluctuation width of the amplitude V 2 is smaller than the predetermined value ⁇ v const (S104: Yes), the processing of FRT processing unit 50 step S105 Proceed to That is, even during disturbance of the power system F, the above-mentioned moving average V 1cal, V 2cal (approximate value of the amplitude V 1, V 2) When is been stabilized, the process of FRT processing unit 50 proceeds to step S105.
- step S104 the condition that the fluctuation width of the amplitude V 1 is the predetermined value Delta] v const above, and, if the variation width of the amplitude V 2 is satisfied at least one of the condition that a predetermined value Delta] v const or (S104: No), the FRT processing unit 50 continues the mask processing in step S103. That is, the above-mentioned moving average V 1 cal, when V 2cal (approximate value of the amplitude V 1, V 2) is fluctuating unstable, FRT processing unit 50 continues the mask processing.
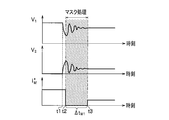
- FIG. 7A is an explanatory diagram showing changes in the amplitude V 1 of the positive phase voltage v 1 , the amplitude V 2 of the negative phase voltage v 2 , and the current command value i M * (effective value) when the disturbance of the power system F occurs. is there.
- the disturbance of the electric power system F generated at time t1 is detected at time t2, and mask processing is performed from time t2 to t3. That is, the mask processing is performed for the first predetermined time ⁇ t M1 after the disturbance detection unit 51 detects the disturbance of the power system F.
- the first predetermined time Delta] t M1 the amplitude V 1 of the positive-phase voltage v 1 of the power system F, and the amplitude V 2 of the negative-phase voltage v 2 is a time to below a predetermined value.
- V 1 cal calculated by FRT processing unit 50 (see FIG. 1)
- V 2cal i.e., amplitude V 1, V 2
- step S104 If the fluctuation range of the amplitudes V 1 and V 2 is less than the predetermined value ⁇ v const in step S104 (S104: Yes), the processing of the FRT processing unit 50 proceeds to step S105.
- step S ⁇ b> 105 the FRT processing unit 50 executes “maximum power control”.
- the “maximum power control” is control for outputting the maximum active power to the power system F.
- FIG. 8 is a flowchart of the maximum power control executed by the maximum power control unit 52 of the FRT processing unit 50.
- the maximum power control unit 52 calculates the maximum active power P max that can be output by the power conversion apparatus 100. A method for calculating the effective power Pmax will be described.
- the voltage v and the current i are in phase.
- the current i is expressed by the following equation (5) using the positive phase voltage v 1 and the reverse phase voltage v 2 .
- i 1 is a positive phase current that is a positive phase component of the current i of the power system F.
- i 2 is a negative phase current that is a negative phase component of the current i of the power system F.
- K 1 and K 2 are predetermined coefficients.
- the average active power P output from the power converter 100 is expressed by the following equation (6).
- the amplitude V 1 of the positive phase voltage v 1 is sufficiently larger than the amplitude V 2 of the negative phase voltage v 2 (see FIG. 7A). Therefore, the following equation (7) is derived by substituting a predetermined upper limit value I max for the coefficient K 1 of equation (6) and substituting zero for the coefficient K 2 .
- the upper limit I max is the current value of the maximum of the power conversion apparatus 100 can output, are stored in advance in the storage unit 54 (see FIG. 4).
- the maximum power control unit 52 calculates the power generation capability P MPPT of the solar cell array E.
- the power generation capacity P MPPT is calculated based on the “hill climbing method” described above. That is, the maximum power control unit 52 calculates the generated power near the maximum point in the PV characteristics (power-voltage characteristics: curve g1 shown in FIG. 9A) of the solar cell array E as the power generation capacity P MPPT .
- step S1053 the maximum power control unit 52 determines whether or not the power generation capacity P MPPT of the solar cell array E is equal to or greater than the maximum effective power Pmax .
- the maximum power control unit 52 generates power that is near the maximum point in the PV characteristics of the solar cell array E (power generation capacity P MPPT ) and the maximum that can be output to the power system F via the power conversion circuit 10.
- the effective power Pmax of the current is compared with the magnitude of the active power Pmax .
- the processing of the maximum power control unit 52 proceeds to step S1054.
- step S1054 the maximum power control unit 52 executes the MP mode.
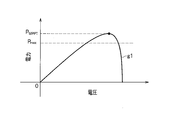
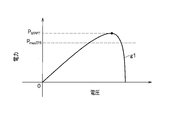
- FIG. 9A is an explanatory diagram of the MP mode in the power conversion device 100.
- the horizontal axis in FIG. 9A is the voltage across the solar cell array E, and the vertical axis is the power.
- An upwardly convex curve g1 shown in FIG. 9A is a PV characteristic of the solar cell array E.
- FIG. 9A is an example, and the PV characteristics of the solar cell array E vary depending on the amount of solar radiation, temperature, years of use, and the like.
- the maximum power control unit 52 specifies the power generation capacity P MPPT corresponding to the maximum point of the curve g1 (S1052).
- the current command value i * corresponding to the active power P max is the current command value. It is output to the control part 40 as iM * (refer FIG. 4). This is the “MP mode” in step S1054.
- the maximum effective power P max can be supplied to the power system F. Moreover, it can prevent that the electric power exceeding the effective electric power Pmax is supplied to the electric power grid
- the maximum power control unit 52 substitutes the upper limit value I max (effective value) for the coefficient K1 and zero for the coefficient K2, as shown in the following equation (8). .
- maximum power control unit 52 sets the effective value of current command value i M * to upper limit value I max .
- the angular frequency of the current command value i M * is the same as the angular frequency ⁇ of the voltage v. Further, the current command value i M * is in phase with the positive phase voltage v 1 .
- step S1053 of FIG. 8 the processing of the maximum power control unit 52 proceeds to step S1055.
- step S1055 the maximum power control unit 52 executes the MC mode.
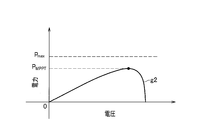
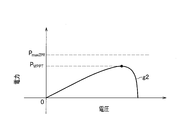
- FIG. 9B is an explanatory diagram of the MC mode in the power conversion device 100.
- the current command value i * corresponding to the power generation capability P MPPT is the current command value i M * Is output to the control unit 40 (see FIG. 4).
- This is the “MC mode” in step S1055.
- active power substantially equal to the power generation capacity P MPPT of the solar cell array E is supplied to the power system F via the power converter 100.
- step S1055 the maximum power control unit 52 substitutes (P MPPT / V 1 ) for the coefficient K1 and zero for the coefficient K2, as shown in the following equation (9).
- the maximum power control unit 52 sets (P MPPT / V 1 ) as the effective value of the current command value i M * .
- the angular frequency of the current command value i M * is the same as the angular frequency ⁇ of the voltage v.
- the current command value i M * is in phase with the positive phase voltage v 1 .
- step S1054 or S1055 the process of the maximum power control unit 52 returns to “START” (“RETURN”). In this way, the maximum power control unit 52 repeats a series of maximum power control (S105: see FIG. 6).
- step S ⁇ b> 106 the FRT processing unit 50 determines whether or not the disturbance detection unit 51 detects that the disturbance of the power system F has disappeared based on the above-described equation (1). That is, the FRT processing unit 50 determines whether or not the three-phase AC voltage v has returned to normal.
- step S106: No When it is not detected that the disturbance of the power system F has been lost (S106: No), the FRT processing unit 50 continues the maximum power control in step S105. On the other hand, when it is detected that the disturbance of the electric power system F has disappeared (S106: Yes), the processing of the FRT processing unit 50 proceeds to step S107.
- step S ⁇ b> 107 the FRT processing unit 50 performs “mask processing” by the mask processing unit 53.
- the FRT processing unit 50 sets the effective value of the current command value i M * to a value smaller than the normal value of the power system F (effective value of the predetermined value i 0 shown in FIG. 4: 0 [A], for example). Set.
- FRT processing unit in step S108 50 are positive-phase voltage v 1 of the fluctuation width of the amplitude V 1, and the fluctuation width of the amplitude V 2 of the negative-phase voltage v 2 is equal to or less than a predetermined value Delta] v const .
- the processing of the FRT processing unit 50 returns to “START”. ("RETURN").
- step S108 the condition that the fluctuation width of the amplitude V 1 is the predetermined value Delta] v const above, and, if the variation width of the amplitude V 2 is satisfied at least one of the condition that a predetermined value Delta] v const or (S108: No), the FRT processing unit 50 continues the mask processing in step S107. That is, the above-mentioned moving average V 1 cal, when V 2cal (approximate value of the amplitude V 1, V 2) is fluctuating unstable, FRT processing unit 50 continues the mask processing.
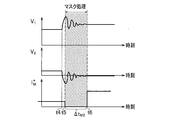
- FIG. 7B is a diagram illustrating changes in the amplitude V 1 of the positive phase voltage v 1 , the amplitude V 2 of the negative phase voltage v 2 , and the current command value i M * (effective value) when the disturbance of the power system F disappears.
- the disturbance of the power system F disappears at time t4, which is detected at time t5, and mask processing is performed from time t5 to t6. That is, the mask processing is performed for the second predetermined time ⁇ t M2 after the disturbance detection unit 51 detects that the disturbance of the power system F has disappeared.
- the second predetermined time Delta] t M2, the amplitude V 1 of the positive-phase voltage v 1 of the power system F, and the amplitude V 2 of the negative-phase voltage v 2 is a time to below a predetermined value.
- the second predetermined time ⁇ t M2 may be the same as the first predetermined time ⁇ t M1 (see FIG. 7A) or may be a value different from the first predetermined time ⁇ t M1 .
- the mask process is performed immediately after the disturbance of the power system F is detected or immediately after it is detected that the power system F has returned to normal.
- power conversion based on an inappropriate current command value i M * (for example, an effective value thereof is excessively large) can be prevented, and thus an overcurrent can be prevented from flowing in the power system F.
- FIG. 10 is an explanatory diagram illustrating changes in the voltage of the power system F, the output current from the power converter 100 to the power system F, and the active power supplied to the power system F in the first embodiment. Note that the broken lines in the output current and active power in FIG. 10 are comparative examples when mask processing is not performed.
- the disturbance of the electric power system F generated at time t21 is detected at time t22, and mask processing is performed from time t22 to t23.
- the disturbance of the electric power system F disappears at time t24, which is detected at time t25, and mask processing is performed from time t25 to t26.
- the maximum power control is performed in the period from time t23 to t25.
- the current command value I M * (effective value) is set to zero during the masking process.
- the output current decreases to zero immediately after the start of the mask process, and the active power to the power system F decreases to zero. Even if the active power temporarily becomes zero in this way, since it is switched to the maximum power control after that, there is almost no adverse effect on the power system F.
- the output current of the comparative example (dashed line) in which masking is not performed is relatively small. However, in some cases, this output current may be excessive. On the other hand, in this embodiment, since the mask process is performed immediately after the state of the power system F changes from one of normal / disturbance to the other, it is possible to prevent the output current to the power system F from becoming excessive.
- the second embodiment differs from the first embodiment in the method of calculating the current command value i * in the maximum power control, but the other (the configuration of the power conversion device 100, etc .: see FIGS. 1 to 5) is the first. This is the same as in the first embodiment. Therefore, a different part from 1st Embodiment is demonstrated and description is abbreviate
- FIG. 11 is a flowchart of the maximum power control executed by the maximum power control unit 52 of the FRT processing unit 50.
- the same step number is attached
- the maximum power control unit 52 calculates the maximum effective power P maxZPR . A method for calculating the maximum effective power P maxZPR will be described.
- the active power P supplied to the power system F via the power converter 100 includes a ripple having a frequency ( ⁇ / ⁇ ) that is twice that of the fundamental frequency ( ⁇ / 2 ⁇ ) of the voltage v. (Refer to formulas (2) to (4) and formula (6)). If a large ripple is included in the active power P, in another power plant (not shown) connected to the power system F, there is a possibility of causing a twisting stress on the shaft of the generator (not shown). There is. Further, if ripple is included in the active power P, the voltage on the DC side of the power conversion device 100 may fluctuate, which may adversely affect the following operation in the maximum power control. Therefore, it is desirable that the ripple of the active power P is small.
- the moving average V 1 cal of formula (3) is substantially equal to the amplitude V 1 of the positive-phase voltage v 1, also moving average V 2Cal of formula (4) reversed phase substantially matches the amplitude V 2 of the voltage v 2. Therefore, the ripple of the active power P is expressed by the following formula (10) based on the calculation results of the formulas (3) and (4) and the positive phase current i 1 and the reverse phase current i 2 of the formula (5). Is done.
- the maximum power control unit 52 calculates the maximum active power P maxZPR based on a first condition and a second condition described later.
- the maximum effective power P maxZPR is a threshold value of the effective power output from the solar cell array E to the power system F via the power conversion circuit 10.
- the first condition is a condition that the ripple of the active power P output from the solar cell array E to the power system F via the power conversion circuit 10 is equal to zero. This is expressed by the following equation (11).
- the second condition is a condition that the maximum value of the peak values of the currents i a , i b and i c (instantaneous values) in the power system F is equal to a predetermined value.
- This predetermined value is a value equal to or lower than the upper limit value I max of the current that can be output from the solar cell array E to the power system F via the power conversion circuit 10 and is set in advance.
- the maximum value of the peak values of the currents i a , i b , i c (instantaneous values) is made equal to the upper limit value I max as shown in the following formula (12). Note that “ ⁇ ” in Expression (12) represents the peak value of each of the three-phase currents i a , i b , and ic .
- the maximum active power P maxZPR is calculated based on the first condition represented by Expression (11) and the second condition represented by Expression (12). Also, coefficients K 1 and K 2 (hereinafter referred to as K 1PmaxZPR and K 2PmaxZPR ) that give the maximum effective power P maxZPR are calculated.
- step S1052 of FIG. 11 the maximum power control unit 52 calculates the power generation capacity P MPPT of the solar cell array E.
- step S1053a the maximum power control unit 52 determines whether or not the power generation capacity P MPPT of the solar cell array E is equal to or greater than the maximum effective power P maxZPR .
- the processing of the maximum power control unit 52 proceeds to step S1054a.
- step S1054a the maximum power control unit 52 executes the MP mode.
- FIG. 12A is an explanatory diagram of the MP mode in the power conversion device 100.
- the power generation capacity P MPPT of the solar cell array E is equal to or greater than the maximum effective power P maxZPR (S1053a: Yes)
- the current command value i * corresponding to the maximum effective power P maxZPR is the current command value. It is output to the control unit 40 as i M * . This is the “MP mode” in step S1054a.
- the maximum power control unit 52 sets the coefficients K 1 and K 2 as shown in the following equation (13).
- the current command value i * is calculated based on the coefficients K 1 and K 2 and the equation (5) described in the first embodiment, and the maximum active power P maxZPR is supplied to the power system F.
- step S1053a when the power generation capacity P MPPT of the solar cell array E is less than the maximum effective power P maxZPR in step S1053a (S1053a: No), the processing of the maximum power control unit 52 proceeds to step S1055a. In step S1055a, the maximum power control unit 52 executes the MC mode.
- FIG. 12B is an explanatory diagram of the MC mode in the power conversion device 100.
- the power generation capability P MPPT of the solar cell array E is less than the maximum effective power P maxZPR (S1053a: No)
- the current command value i * corresponding to the power generation capability P MPPT of the solar cell array E is The current command value i M * is output to the control unit 40. This is the “MC mode” in step S1055a.
- the maximum power control unit 52 sets the coefficients K 1 and K 2 so that the following expression (14) is satisfied.
- the following equation (15) is derived for the coefficients K 1 and K 2 .
- the current command value i * is calculated based on the coefficients K 1 and K 2 and the formula (5) described in the first embodiment, and the active power substantially equal to the power generation capability P MPPT of the solar cell array E is converted into power conversion.
- the power is supplied to the power system F through the device 100.
- ripple of active power supplied to the power system F can be suppressed during execution of maximum power control. That is, since the active power can be stably supplied to the power system F, the twisting stress in the shaft of the generator (not shown) can be suppressed in another power plant (not shown) connected to the power system F. . Further, the tracking operation based on the maximum power control is appropriately performed.
- FIG. 13 is an explanatory diagram showing changes in the voltage of the power system F, the output current from the power converter 100 to the power system F, and the active power supplied to the power system F in the second embodiment. Note that the broken lines in the output current and active power in FIG. 13 are comparative examples when mask processing is not performed.
- the disturbance of the electric power system F generated at time t31 is detected at time t32, and mask processing is performed from time t32 to t33.
- the disturbance of the electric power system F disappears at time t34, which is detected at time t35, and mask processing is performed from time t35 to t36.
- the maximum power control is performed in the period from time t33 to t35.
- the “first predetermined time” and the “second predetermined time” are set to a time longer than a half cycle of the voltage v of the power system F when the power system F is normal.
- This aforementioned moving average V 1 cal it is to ensure the operation cycle of the V 2cal.
- the mask process may be executed until the fluctuation range of at least one of the amplitudes V 1 and V 2 becomes less than the predetermined value ⁇ v const .
- the mask process may be executed until the fluctuation range of at least one of the amplitudes V 1 and V 2 becomes less than the predetermined value ⁇ v const .
- the mask process is performed immediately after the power system F changes from one of disturbance and normal to the other, but the present invention is not limited to this.
- the mask process may be performed immediately after a disturbance occurs in the power system F, and the mask process may not be performed immediately after the power system F returns to normal.
- the predetermined value i 0 is the current command value i M * in the mask processing is set to zero, is not limited thereto. That is, a predetermined value i 0 greater than zero may be stored in the storage unit 54 in advance.
- each embodiment demonstrated the case where calculation of the electric current command value i * was repeated by the maximum electric power control part 52 also during a mask process, it is not restricted to this. That is, during the mask process, the FRT processing unit 50 may stop the calculation process of the current command value i * by the maximum power control unit 52. Even if it does in this way, the same effect as each embodiment is produced.
- the FRT processing unit 50 performs the “mountain climbing method” in the normal control (S101: refer to FIG. 6) or the maximum power control (S105: refer to FIG. 6) has been described. . That is, the FRT processing unit 50 may perform another known method such as “scanning method”.
- the “scanning method” is a method of specifying the operating point that gives the maximum value of the generated power by moving the operating point in the PV characteristics of the solar cell array E within a predetermined voltage range. Thereby, even when there are a plurality of maximum points in the PV characteristics of the solar cell array E, the maximum generated power can be supplied to the power system F.
- the PCS for wind power generation includes a converter (not shown) that converts the generated power (AC power) of the wind power generator (distributed power source) into DC power, and the DC power input from the converter is a predetermined AC power. And an inverter (not shown) that outputs this AC power to the power system F.
- control part 40 and the FRT process part 50 were described as another structure, you may comprise these as one controller.
- the maximum value of the peak values of the currents i a , i b , i c (instantaneous values) in the power system F is set to a predetermined value (upper limit value I max ) as the “second condition”.
- a predetermined value upper limit value I max
- the peak value of the instantaneous value of the current of the power system F may be made equal to a predetermined value.
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Inverter Devices (AREA)
Abstract
信頼性の高い電力変換装置等を提供する。電力変換装置(100)は、太陽電池アレイ(E)の発電電力を交流電力に変換する電力変換回路(10)と、電力系統(F)の擾乱の有無を検知する擾乱検知部と、電流指令値に基づいて、電力変換回路(10)を制御する制御部(40)と、擾乱検知部によって電力系統(F)の擾乱が検知されてから所定時間、電流指令値の実効値を、電力系統(F)の正常時よりも小さな値に設定するマスク処理部と、を備える。
Description
本発明は、電力変換を行う電力変換装置及び電力変換方法に関する。
分散型電源の発電電力を電力系統に供給するパワーコンディショナが普及している。パワーコンディショナは、電力系統で擾乱(電圧の瞬時低下や三相不平衡等)が生じた場合、電力系統から分散型電源を解列する保護機能を有しているが、多数の分散型電源が一斉に解列すると、大規模な停電が起こる可能性がある。したがって、電力系統の擾乱中もパワーコンディショナの運転を継続するFRT機能(Fault Ride Through)を設けるべき旨が、系統連系規程(Grid Code)に規定されている。このようなFRT機能に関する技術として、例えば、特許文献1に記載の技術が知られている。
すなわち、特許文献1には、「系統電源電圧の位相変化成分からノイズ成分を除去した補正位相変化成分を求め、…FRT判定指標に基づいて前記交流電力系統の擾乱判定を行う」ことが記載されている。
ところで、FRT機能に基づく処理の開始直後には、電力系統の擾乱と、FRT機能へのモード切替えと、が相まって、パワーコンディショナの出力電流が過大になることが多い。しかしながら、特許文献1には、このような問題を解決するための技術については記載されていない。前記した系統連系規程を順守すべく、信頼性の高い電力変換装置が求められている。
そこで、本発明は、信頼性の高い電力変換装置等を提供することを課題とする。
前記課題を解決するために、本発明に係る電力変換装置は、分散型電源の発電電力を交流電力に変換し、前記交流電力を電力系統に出力する電力変換回路と、前記電力系統の電圧に基づいて、前記電力系統の擾乱の有無を検知する擾乱検知部と、前記電力変換回路を介して前記電力系統に出力される電流の指令値である電流指令値に基づいて、前記電力変換回路を制御する制御部と、前記擾乱検知部によって前記電力系統の擾乱が検知されてから第1所定時間、前記電流指令値の実効値を、前記電力系統の正常時よりも小さな値に設定するマスク処理を実行するマスク処理部と、を備えることを特徴とする。
本発明によれば、信頼性の高い電力変換装置等を提供できる。
≪第1実施形態≫
<電力変換装置の構成>
図1は、第1実施形態に係る電力変換装置100を含む構成図である。
電力変換装置100は、太陽電池アレイE(分散型電源)の発電電力を交流電力に変換し、この交流電力を電力系統Fに出力するパワーコンディショナ(Power Conditioning System:PCS)である。
<電力変換装置の構成>
図1は、第1実施形態に係る電力変換装置100を含む構成図である。
電力変換装置100は、太陽電池アレイE(分散型電源)の発電電力を交流電力に変換し、この交流電力を電力系統Fに出力するパワーコンディショナ(Power Conditioning System:PCS)である。
図1に示すように、電力変換装置100は、電力変換回路10と、電圧検出器20と、電流検出器30と、制御部40と、FRT処理部50と、を備えている。
電力変換回路10は、太陽電池アレイEの発電電力(つまり、直流電力)を交流電力に変換し、この交流電力を電力系統Fに出力する三相インバータである。
電力変換回路10は、太陽電池アレイEの発電電力(つまり、直流電力)を交流電力に変換し、この交流電力を電力系統Fに出力する三相インバータである。
図2は、電力変換装置100の電力変換回路10を含む構成図である。
なお、図2では、電圧検出器20及び電流検出器30の図示を省略している。
図2に示すように、電力変換回路10は、コンデンサ11と、ブリッジ回路12と、リアクトル13と、を備えている。
コンデンサ11は、ブリッジ回路12の直流側の電圧を平滑化する素子であり、その正極・負極が太陽電池アレイEに接続されている。なお、複数のコンデンサ(図示せず)が直列接続された構成であってもよい。
なお、図2では、電圧検出器20及び電流検出器30の図示を省略している。
図2に示すように、電力変換回路10は、コンデンサ11と、ブリッジ回路12と、リアクトル13と、を備えている。
コンデンサ11は、ブリッジ回路12の直流側の電圧を平滑化する素子であり、その正極・負極が太陽電池アレイEに接続されている。なお、複数のコンデンサ(図示せず)が直列接続された構成であってもよい。
ブリッジ回路12は、スイッチング素子S1,S2を備える第1レグと、スイッチング素子S3,S4を備える第2レグと、スイッチング素子S5,S6を備える第3レグと、が並列接続された構成になっている。このようなスイッチング素子S1~S6として、例えば、IGBT(Insulated Gate Bipolar Transistor)を用いることができる。
図2に示すように、コンデンサ11の正極にコレクタが接続されたスイッチング素子S1と、コンデンサ11の負極にエミッタが接続されたスイッチング素子S2と、の接続点が、a相のリアクトル13を介して電力系統Fに接続されている(b相、c相についても同様)。
また、スイッチング素子S1~S6には、それぞれ、還流ダイオードDが逆並列に接続されている。そして、制御部40(図1参照)からスイッチング素子S1~S6のゲートに所定のPWM信号(Pulse Width Modulation)が出力されることによって、スイッチング素子S1~S6のオン・オフが切替わるようになっている。
リアクトル13は、スイッチング素子S1~S6のスイッチングノイズを除去するものであり、電力系統F側の3相配線にそれぞれ設置されている。
図1に示す電圧検出器20は、電力系統Fの電圧v(例えば、a相・b相・c相の線間電圧)を検出するセンサである。電圧検出器20の検出値は、制御部40及びFRT処理部50に出力される。
図1に示す電流検出器30は、電力系統Fの電流i(a相・b相・c相のそれぞれの電流)を検出するセンサである。電流検出器30の検出値は、制御部40に出力される。
図1に示す電流検出器30は、電力系統Fの電流i(a相・b相・c相のそれぞれの電流)を検出するセンサである。電流検出器30の検出値は、制御部40に出力される。
図1に示す制御部40は、図示はしないが、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、各種インタフェース等の電子回路を含んで構成されている。そして、ROMに記憶されたプログラムを読み出してRAMに展開し、CPUが各種処理を実行するようになっている。
制御部40は、FRT処理部50から入力される電流指令値iM
*に基づいて、電力変換回路10を制御する(制御処理)。すなわち、制御部40は、電流指令値iM
*に基づいて、スイッチング素子S1~S6(図2参照)のオン・オフを制御する。なお、前記した電流指令値iM
*とは、電力変換回路10を介して電力系統Fに出力される電流の指令値である。
図3は、電力変換装置100が備える制御部40の機能ブロック図である。
図3に示すように、制御部40は、位相角特定部41と、3相2軸変換部42と、減算器43と、PI制御部44(Proportional Integral Controller)と、2軸3相変換部45と、PWM信号生成部46と、を備えている。
位相角特定部41は、電圧検出器20によって検出される電圧vの位相角を特定する。
図3に示すように、制御部40は、位相角特定部41と、3相2軸変換部42と、減算器43と、PI制御部44(Proportional Integral Controller)と、2軸3相変換部45と、PWM信号生成部46と、を備えている。
位相角特定部41は、電圧検出器20によって検出される電圧vの位相角を特定する。
3相2軸変換部42は、電流検出器30(図1参照)によって検出される3相(a相・b相・c相)の電流iを、位相角特定部41から入力される位相角に基づいて、回転座標系であるd軸・q軸の電流値に変換する。
減算器43は、FRT処理部50(図1参照)から入力される電流指令値iM *(回転座標系での電流指令値)と、3相2軸変換部42から入力される電流値と、の差分を算出する。
減算器43は、FRT処理部50(図1参照)から入力される電流指令値iM *(回転座標系での電流指令値)と、3相2軸変換部42から入力される電流値と、の差分を算出する。
PI制御部44は、減算器43から入力される差分に基づき、PI制御に基づいて、電流iを電流指令値iM
*に近づけるようにd軸・q軸の電圧指令値を算出する。
2軸3相変換部45は、PI制御部44から入力されるd軸・q軸の電圧指令値を、位相角特定部41から入力される位相角に基づいて、a相・b相・c相の3相座標系に変換する。
2軸3相変換部45は、PI制御部44から入力されるd軸・q軸の電圧指令値を、位相角特定部41から入力される位相角に基づいて、a相・b相・c相の3相座標系に変換する。
PWM信号生成部46は、2軸3相変換部45から入力される3相座標系の電圧指令値に基づいてPWM信号を生成し、このPWM信号をスイッチング素子S1~S6(図2参照)のゲートに出力する。これによって、太陽電池アレイE(図1参照)から入力される直流電力が、電力変換装置100において所定の交流電力に変換される。
図1に示すFRT処理部50は、電力系統Fの擾乱中においても電力変換を継続する機能を有している。なお、電力系統Fの「擾乱」とは、電力系統Fの電圧の瞬時低下や、三相不平衡の状態等を意味している。
図4は、電力変換装置100が備えるFRT処理部50の機能ブロック図である。
FRT処理部50は、図示はしないが、CPU、ROM、RAM、各種インタフェース等の電子回路を含んで構成され、ROMに記憶されたプログラムを読み出してRAMに展開し、CPUが各種処理を実行するようになっている。図4に示すように、FRT処理部50は、擾乱検知部51と、最大電力制御部52と、マスク処理部53と、記憶部54と、を備えている。
FRT処理部50は、図示はしないが、CPU、ROM、RAM、各種インタフェース等の電子回路を含んで構成され、ROMに記憶されたプログラムを読み出してRAMに展開し、CPUが各種処理を実行するようになっている。図4に示すように、FRT処理部50は、擾乱検知部51と、最大電力制御部52と、マスク処理部53と、記憶部54と、を備えている。
擾乱検知部51は、電圧検出器20(図1参照)によって検出される電力系統Fの電圧vに基づき、以下の式(1)を用いて、電力系統Fの擾乱の有無を検知する(擾乱検知処理)。なお、式(1)に示す電圧vm(m=a,b,c)は、電圧検出器20によって検出される三相の電圧である。また、所定値Vnormalは、電力系統Fの正常時における式(1)の左辺の値である。kは、1よりも小さい所定値である。

式(1)が成立した場合、擾乱検知部51は、「電力系統Fに擾乱あり」と判定する。つまり、擾乱検知部51は、電力系統Fの擾乱を検知する。その後、式(1)が成立しなくなった場合、擾乱検知部51は、「電力系統Fに擾乱なし」と判定する。つまり、擾乱検知部51は、電力系統Fの擾乱が無くなった(正常に戻ったこと)を検知する。なお、擾乱検知部51による判定処理は、所定周期で繰り返される。
記憶部54には、電圧検出器20・電流検出器30(図1参照)の検出値等が、時刻に対応付けて格納される。また、記憶部54には、後記する「マスク処理」で用いられる電流指令値(所定値i0)が予め記憶されている。
最大電力制御部52は、電力系統Fに最大限の有効電力が供給されるように、電圧検出器20の検出値(電圧v)に基づいて、電流指令値i*を算出する。このような処理を「最大電力制御」という。より詳しく説明すると、最大電力制御部52は、擾乱検知部51によって電力系統Fの擾乱が検知された直後の「マスク処理」と、電力系統Fの擾乱が無くなったことが検知された直後の別の「マスク処理」と、の間の期間に「最大電力制御」を実行する。
なお、「マスク処理」とは、最大電力制御部52によって算出される電流指令値i*を敢えて無視し、電流指令値iM
*の実効値を、電力系統Fの正常時よりも小さな値(所定値i0)に設定する処理である。
マスク処理部53は、擾乱検知部51によって電力系統Fの擾乱が検知された直後や、電力系統Fの擾乱が無くなったことが検知された直後に、前記した「マスク処理」を行う。ここで、「マスク処理」を行う意義等について簡単に説明する。電力系統Fの擾乱中、電力系統Fの電圧vには、以下の式(2)で示すように、正相電圧v1及び逆相電圧v2が含まれている。
なお、式(2)に示す正相電圧v1は、電力系統Fの電圧vの正相成分である。つまり、正相電圧v1は、正常時における電力系統Fの交流電圧と同じ向きで相回転する対称三相の電圧である。また、V1は正相電圧v1の振幅であり、θ1は正相電圧v1の位相であり、ωは電力系統Fの電圧vの角周波数である。
また、式(2)に示す逆相電圧v2は、電力系統Fの電圧vの逆相成分である。つまり、逆相電圧v2は、正常時における電力系統Fの交流電圧とは逆向きで相回転する対称三相の電圧である。また、V2は逆相電圧v2の振幅であり、θ2は逆相電圧v2の位相である。ちなみに、電力系統Fの正常時には、逆相電圧v2が略ゼロであり、電力系統Fの電圧vは正相電圧v1に略等しい値になっている。
図4に示すFRT処理部50は、倍調波等の影響を抑制するために、以下の式(3)、(4)に示す移動平均積分演算を行う。すなわち、FRT処理部50は、式(3)に基づいて、正相電圧v1の移動平均V1calを算出するとともに、式(4)に基づいて、逆相電圧v2の移動平均V2calを算出する。なお、移動平均V1calは、正相電圧v1の振幅V1の近似値として用いられ、移動平均V2calは、逆相電圧v2の振幅V2の近似値として用いられる。


式(3)、(4)の移動平均積分演算は、角周波数2ωの1周期分(つまり、電力系統Fの電圧vの半周期分)に亘って時々刻々に行われる。したがって、電力系統Fの擾乱が検知されてから、少なくとも電圧vの半周期の時間が経過するまでは、移動平均V1cal,V2calの値が安定しないことが多い。
同様に、電力系統Fが正常に戻ったことが検知されてから、少なくとも電力系統Fの電圧vの半周期の時間が経過するまでは、移動平均V1cal,V2calの値が安定しないことが多い。要するに、電力系統Fの状態が正常・擾乱の一方から他方に変化した直後は、それに応じた新たな移動平均V1cal・移動平均V2calが算出されるまでに、所定の演算時間(電圧vの半周期)を要する。
図14は、マスク処理を行わない比較例における電力系統Fの電圧、正相電圧v1の振幅V1、移動平均V1cal、逆相電圧v2の振幅V2、及び移動平均V2calの変化を示す説明図である。
図14に示す例では、電力系統Fの擾乱が発生した時刻t11から、電力系統Fが正常に戻った時刻t12までは、移動平均V1cal,V2calに基づいて、所定の電力変換が行われている。
図14に示す例では、電力系統Fの擾乱が発生した時刻t11から、電力系統Fが正常に戻った時刻t12までは、移動平均V1cal,V2calに基づいて、所定の電力変換が行われている。
図14に示すように、時刻t11から所定時間Δtpが経過するまでは、移動平均V1calが正相電圧v1の振幅V1に一致せず、また、移動平均V2calが逆相電圧v2の振幅V2に一致していない。なお、電力系統Fが正常に戻った時刻t12から所定時間Δtqにおいても同様のことがいえる。
仮に、不安定に変動する移動平均V1cal,V2calが、そのまま電力変換装置100の制御に反映されると、電力系統Fへの出力電流iが過大になる可能性がある。したがって、本実施形態では、電力系統Fの状態が正常・擾乱の一方から他方に変化した直後に過電流が流れないように「マスク処理」を行うようにしている。
図5は、マスク処理部53の機能ブロック図である。
図5に示すように、マスク処理部53は、ローパスフィルタ53aと、減算器53bと、絶対値回路53c(Absolute value circuit:ABS)と、比較器53dと、信号処理部53eと、を備えている。
なお、マスク処理部53には、電力系統Fの擾乱の有無を示す検知信号の他、電力系統Fの正相電圧v1の振幅V1、及び逆相電圧v2の振幅V2が入力される。なお、振幅V1の近似値として、前記した式(3)の移動平均V1calが用いられ、振幅V2の近似値として、前記した式(4)の移動平均V2calが用いられる。
図5に示すように、マスク処理部53は、ローパスフィルタ53aと、減算器53bと、絶対値回路53c(Absolute value circuit:ABS)と、比較器53dと、信号処理部53eと、を備えている。
なお、マスク処理部53には、電力系統Fの擾乱の有無を示す検知信号の他、電力系統Fの正相電圧v1の振幅V1、及び逆相電圧v2の振幅V2が入力される。なお、振幅V1の近似値として、前記した式(3)の移動平均V1calが用いられ、振幅V2の近似値として、前記した式(4)の移動平均V2calが用いられる。
図5に示すローパスフィルタ53aは、振幅V1,V2に含まれる低周波成分を抽出し、高周波成分を除去するフィルタである。
減算器53bは、正相電圧v1の振幅V1からローパスフィルタ53aの出力値(振幅V1に対応)を減算する機能を有している。また、減算器53bは、逆相電圧v2の振幅V2からローパスフィルタ53aの出力値(振幅V2に対応)を減算する機能も有している。
減算器53bは、正相電圧v1の振幅V1からローパスフィルタ53aの出力値(振幅V1に対応)を減算する機能を有している。また、減算器53bは、逆相電圧v2の振幅V2からローパスフィルタ53aの出力値(振幅V2に対応)を減算する機能も有している。
絶対値回路53cは、減算器53bから入力される値の絶対値をとる回路である。この絶対値回路53cにおいて、所定時間における正相電圧v1の振幅V1の変動幅、及び、所定時間における逆相電圧v2の振幅V2の変動幅が算出される。
比較器53dは、絶対値回路53cから入力される振幅V1,V2の変動幅と、所定値Δvconstと、の大小を、振幅V1,V2のそれぞれについて比較する回路である。なお、所定値Δvconstは、電力系統Fの電圧vが安定している(例えば、三相不平衡であっても、その状態が継続している)か否かの判定基準となる閾値であり、予め設定されている。
信号処理部53eは、比較器53dの比較結果に基づいて、所定の電流指令値iM
*を制御部40(図1参照)に出力する機能を有している。つまり、信号処理部53eは、最大電力制御部52(図4参照)によって算出される電流指令値i*、及び記憶部54(図4参照)に格納されている所定値i0のうち一方を、比較器53dの比較結果に基づいて選択する。そして、信号処理部53eは、選択した値を電流指令値iM
*として制御部40(図1参照)に出力する。なお、信号処理部53eが実行する処理については後記する。
<電力変換装置の処理>
図6は、電力変換装置100のFRT処理部50が実行する処理のフローチャートである(適宜、図4を参照)。
なお、図6の「START」時には、電力系統Fで擾乱が生じていないものとする。
ステップS101においてFRT処理部50は、通常制御を実行する。なお、「通常制御」とは、電力系統Fが正常であるときに行われる制御である。このような「通常制御」として、例えば、「山登り法」が挙げられる。
図6は、電力変換装置100のFRT処理部50が実行する処理のフローチャートである(適宜、図4を参照)。
なお、図6の「START」時には、電力系統Fで擾乱が生じていないものとする。
ステップS101においてFRT処理部50は、通常制御を実行する。なお、「通常制御」とは、電力系統Fが正常であるときに行われる制御である。このような「通常制御」として、例えば、「山登り法」が挙げられる。
「山登り法」は、太陽電池アレイEのP‐V特性(電力‐電圧特性:図9Aに示す曲線g1)における極大点付近の発電電力を特定する方法である。より詳しく説明すると、FRT処理部50は、太陽電池アレイEのP-V特性において動作点を移動させ、移動後における発電電力が、移動前の発電電力を上回るようにする。これによって、P-V特性の極大点付近の動作点が特定される。
次に、ステップS102においてFRT処理部50は、前記した式(1)に基づき、擾乱検知部51によって電力系統Fの擾乱が検知されたか否かを判定する。電力系統Fの擾乱が検知されていない場合(S102:No)、FRT処理部50は、ステップS101の通常制御を継続する(「RETURN」)。一方、電力系統Fの擾乱が検知された場合(S102:Yes)、FRT処理部50の処理はステップS103に進む。
ステップS103においてFRT処理部50は、マスク処理部53によって、「マスク処理」を実行する。つまり、FRT処理部50は、電流指令値iM
*の実効値を、電力系統Fの正常時よりも小さい所定値i0に設定する。この所定値i0は、電力系統Fの電流iの過渡的な変動を抑制するための電流指令値であり、比較的小さな値として記憶部54(図4参照)に格納されている。なお、本実施形態では、一例として、所定値i0を0[A]としている。このように、電力系統Fの擾乱が検知された直後に電流指令値iM
*を所定値i0に設定することで、電力系統Fに過電流が流れることを防止できる。
ステップS104においてFRT処理部50は、正相電圧v1の振幅V1の変動幅、及び、逆相電圧v2の振幅V2の変動幅が所定値Δvconst未満であるか否かを判定する。
ステップS104において振幅V1の変動幅が所定値Δvconst未満であり、かつ、振幅V2の変動幅が所定値Δvconst未満である場合(S104:Yes)、FRT処理部50の処理はステップS105に進む。すなわち、電力系統Fの擾乱中であっても、前記した移動平均V1cal,V2cal(振幅V1,V2の近似値)が安定してきたら、FRT処理部50の処理はステップS105に進む。
ステップS104において振幅V1の変動幅が所定値Δvconst未満であり、かつ、振幅V2の変動幅が所定値Δvconst未満である場合(S104:Yes)、FRT処理部50の処理はステップS105に進む。すなわち、電力系統Fの擾乱中であっても、前記した移動平均V1cal,V2cal(振幅V1,V2の近似値)が安定してきたら、FRT処理部50の処理はステップS105に進む。
一方、ステップS104において、振幅V1の変動幅が所定値Δvconst以上であるという条件、及び、振幅V2の変動幅が所定値Δvconst以上であるという条件の少なくとも一方が満たされている場合(S104:No)、FRT処理部50はステップS103のマスク処理を継続する。すなわち、前記した移動平均V1cal,V2cal(振幅V1,V2の近似値)が不安定に変動しているときには、FRT処理部50はマスク処理を継続する。
図7Aは、電力系統Fの擾乱発生時における正相電圧v1の振幅V1、逆相電圧v2の振幅V2、及び電流指令値iM
*(実効値)の変化を示す説明図である。
図7Aに示す例では、時刻t1に発生した電力系統Fの擾乱が時刻t2において検知され、時刻t2~t3においてマスク処理が行われている。つまり、擾乱検知部51によって電力系統Fの擾乱が検知されてから第1所定時間ΔtM1、マスク処理が行われている。この第1所定時間ΔtM1は、電力系統Fの正相電圧v1の振幅V1、及び逆相電圧v2の振幅V2が所定値未満になるまでの時間である。要するに、電力系統Fの擾乱が発生した直後、FRT処理部50(図1参照)によって算出される移動平均V1cal,V2cal(つまり、振幅V1,V2)が安定するまでは、マスク処理が行われている。
図7Aに示す例では、時刻t1に発生した電力系統Fの擾乱が時刻t2において検知され、時刻t2~t3においてマスク処理が行われている。つまり、擾乱検知部51によって電力系統Fの擾乱が検知されてから第1所定時間ΔtM1、マスク処理が行われている。この第1所定時間ΔtM1は、電力系統Fの正相電圧v1の振幅V1、及び逆相電圧v2の振幅V2が所定値未満になるまでの時間である。要するに、電力系統Fの擾乱が発生した直後、FRT処理部50(図1参照)によって算出される移動平均V1cal,V2cal(つまり、振幅V1,V2)が安定するまでは、マスク処理が行われている。
また、ステップS104において振幅V1,V2の変動幅が所定値Δvconst未満である場合(S104:Yes)、FRT処理部50の処理はステップS105に進む。
ステップS105においてFRT処理部50は、「最大電力制御」を実行する。なお、「最大電力制御」とは、電力系統Fに最大限の有効電力を出力する制御である。
ステップS105においてFRT処理部50は、「最大電力制御」を実行する。なお、「最大電力制御」とは、電力系統Fに最大限の有効電力を出力する制御である。
図8は、FRT処理部50の最大電力制御部52が実行する最大電力制御のフローチャートである。
ステップS1051において最大電力制御部52は、電力変換装置100が出力し得る最大限の有効電力Pmaxを算出する。この有効電力Pmaxの算出方法について説明する。
ステップS1051において最大電力制御部52は、電力変換装置100が出力し得る最大限の有効電力Pmaxを算出する。この有効電力Pmaxの算出方法について説明する。
電力系統Fから最大限の有効電力Pmaxが出力されているときには、電圧vと電流iとが同位相になっている。この場合において電流iは、正相電圧v1・逆相電圧v2を用いて、以下の式(5)で表される。なお、i1は、電力系統Fの電流iの正相成分である正相電流である。また、i2は、電力系統Fの電流iの逆相成分である逆相電流である。また、K1,K2は、所定の係数である。

前記した式(5)に基づき、電力変換装置100から出力される平均有効電力Pは、以下の式(6)で表される。
また一般に、電力系統Fの擾乱時において、逆相電圧v2の振幅V2よりも正相電圧v1の振幅V1のほうが十分に大きい(図7A参照)。したがって、式(6)の係数K1に所定の上限値Imaxを代入し、係数K2にゼロを代入することによって、以下の式(7)が導かれる。なお、上限値Imaxは、電力変換装置100が出力し得る最大限の電流値であり、予め記憶部54(図4参照)に格納されている。
次に、図8のステップS1052において最大電力制御部52は、太陽電池アレイEの発電能力PMPPTを算出する。この発電能力PMPPTは、前記した「山登り法」に基づいて、算出される。すなわち、最大電力制御部52は、太陽電池アレイEのP‐V特性(電力‐電圧特性:図9Aに示す曲線g1)における極大点付近の発電電力を、発電能力PMPPTとして算出する。
ステップS1053において最大電力制御部52は、太陽電池アレイEの発電能力PMPPTが、最大限の有効電力Pmax以上であるか否かを判定する。言い換えると、最大電力制御部52は、太陽電池アレイEのP‐V特性における極大点付近の発電電力(発電能力PMPPT)と、電力変換回路10を介して電力系統Fに出力し得る最大限の有効電力Pmaxと、の大小を比較する。発電能力PMPPTが、最大限の有効電力Pmax以上である場合(S1053:Yes)、最大電力制御部52の処理はステップS1054に進む。
ステップS1054において最大電力制御部52は、MPモードを実行する。
ステップS1054において最大電力制御部52は、MPモードを実行する。
図9Aは、電力変換装置100におけるMPモードの説明図である。
図9Aの横軸は、太陽電池アレイEの両端の電圧であり、縦軸は電力である。図9Aに示す上に凸の曲線g1は、太陽電池アレイEのP-V特性である。なお、図9Aは一例であり、太陽電池アレイEのP-V特性は、日射量・温度・使用年数等によって変化する。「山登り法」において最大電力制御部52は、この曲線g1の極大点に対応する発電能力PMPPTを特定する(S1052)。
図9Aの横軸は、太陽電池アレイEの両端の電圧であり、縦軸は電力である。図9Aに示す上に凸の曲線g1は、太陽電池アレイEのP-V特性である。なお、図9Aは一例であり、太陽電池アレイEのP-V特性は、日射量・温度・使用年数等によって変化する。「山登り法」において最大電力制御部52は、この曲線g1の極大点に対応する発電能力PMPPTを特定する(S1052)。
そして、図9Aに示すように、太陽電池アレイEの発電能力PMPPTが有効電力Pmax以上である場合(S1053:Yes)、有効電力Pmaxに対応する電流指令値i*が、電流指令値iM
*として制御部40に出力される(図4参照)。これが、ステップS1054の「MPモード」である。これによって、最大限の有効電力Pmaxを電力系統Fに供給できる。また、電力系統Fに有効電力Pmaxを超える電力が供給されることを防止し、ひいては、太陽電池アレイEの端子間電圧の低下を抑制できる。
また、ステップS1054の「MPモード」において最大電力制御部52は、以下の式(8)に示すように、係数K1に上限値Imax(実効値)を代入し、係数K2にゼロを代入する。

つまり、最大電力制御部52は、電流指令値iM
*の実効値を上限値Imaxに設定する。なお、式(5)に示すように、電流指令値iM
*の角周波数は、電圧vの角周波数ωと同一である。また、電流指令値iM
*は、正相電圧v1と同位相である。
また、図8のステップS1053において太陽電池アレイEの発電能力PMPPTが、最大限の有効電力Pmax未満である場合(S1053:No)、最大電力制御部52の処理はステップS1055に進む。
ステップS1055において最大電力制御部52は、MCモードを実行する。
ステップS1055において最大電力制御部52は、MCモードを実行する。
図9Bは、電力変換装置100におけるMCモードの説明図である。
図9Bに示すように、太陽電池アレイEの発電能力PMPPTが有効電力Pmax未満である場合(S1053:No)、発電能力PMPPTに対応する電流指令値i*が、電流指令値iM *として制御部40に出力される(図4参照)。これが、ステップS1055の「MCモード」である。これによって、太陽電池アレイEの発電能力PMPPTに略等しい有効電力が、電力変換装置100を介して電力系統Fに供給される。
図9Bに示すように、太陽電池アレイEの発電能力PMPPTが有効電力Pmax未満である場合(S1053:No)、発電能力PMPPTに対応する電流指令値i*が、電流指令値iM *として制御部40に出力される(図4参照)。これが、ステップS1055の「MCモード」である。これによって、太陽電池アレイEの発電能力PMPPTに略等しい有効電力が、電力変換装置100を介して電力系統Fに供給される。
また、ステップS1055のMCモードにおいて最大電力制御部52は、以下の式(9)に示すように、係数K1に(PMPPT/V1)を代入し、係数K2にゼロを代入する。

つまり、最大電力制御部52は、電流指令値iM
*の実効値として(PMPPT/V1)を設定する。なお、式(5)に示すように、電流指令値iM
*の角周波数は、電圧vの角周波数ωと同一である。また、電流指令値iM
*は、正相電圧v1と同位相である。
ステップS1054又はS1055の処理を行った後、最大電力制御部52の処理は「START」に戻る(「RETURN」)。このようにして最大電力制御部52は、一連の最大電力制御(S105:図6参照)を繰り返す。
再び、図6に戻って説明を続ける。
ステップS106においてFRT処理部50は、前記した式(1)に基づき、電力系統Fの擾乱が無くなったことが、擾乱検知部51によって検知されたか否かを判定する。つまり、FRT処理部50は、三相交流の電圧vが正常に戻ったか否かを判定する。
ステップS106においてFRT処理部50は、前記した式(1)に基づき、電力系統Fの擾乱が無くなったことが、擾乱検知部51によって検知されたか否かを判定する。つまり、FRT処理部50は、三相交流の電圧vが正常に戻ったか否かを判定する。
電力系統Fの擾乱が無くなったことが検知されていない場合(S106:No)、FRT処理部50は、ステップS105の最大電力制御を継続する。一方、電力系統Fの擾乱が無くなったことが検知された場合(S106:Yes)、FRT処理部50の処理はステップS107に進む。
ステップS107においてFRT処理部50は、マスク処理部53によって、「マスク処理」を実行する。つまり、FRT処理部50は、電流指令値iM
*の実効値を、電力系統Fの正常時よりも小さな値(図4に示す所定値i0の実効値:例えば、0[A])に設定する。このように電力系統Fの擾乱が無くなった直後に、電流指令値iM
*を所定値i0に設定することで、電力系統Fに過電流が流れることを防止できる。
ステップS108においてFRT処理部50は、正相電圧v1の振幅V1の変動幅、及び、逆相電圧v2の振幅V2の変動幅が所定値Δvconst未満であるか否かを判定する。
振幅V1の変動幅が所定値Δvconst未満であり、かつ、振幅V2の変動幅が所定値Δvconst未満である場合(S108:Yes)、FRT処理部50の処理は「START」に戻る(「RETURN」)。つまり、電力系統Fが正常に戻った後、前記した移動平均V1cal,V2cal(振幅V1,V2の近似値)が安定してきたら、FRT処理部50は、ステップS101の通常制御を再び行う。
振幅V1の変動幅が所定値Δvconst未満であり、かつ、振幅V2の変動幅が所定値Δvconst未満である場合(S108:Yes)、FRT処理部50の処理は「START」に戻る(「RETURN」)。つまり、電力系統Fが正常に戻った後、前記した移動平均V1cal,V2cal(振幅V1,V2の近似値)が安定してきたら、FRT処理部50は、ステップS101の通常制御を再び行う。
一方、ステップS108において、振幅V1の変動幅が所定値Δvconst以上であるという条件、及び、振幅V2の変動幅が所定値Δvconst以上であるという条件の少なくとも一方が満たされている場合(S108:No)、FRT処理部50はステップS107のマスク処理を継続する。すなわち、前記した移動平均V1cal,V2cal(振幅V1,V2の近似値)が不安定に変動しているときには、FRT処理部50はマスク処理を継続する。
図7Bは、電力系統Fの擾乱が無くなったときの正相電圧v1の振幅V1、逆相電圧v2の振幅V2、及び電流指令値iM
*(実効値)の変化を示す説明図である。
図7Bに示す例では、時刻t4に電力系統Fの擾乱が無くなり、それが時刻t5において検知され、時刻t5~t6においてマスク処理が行われている。つまり、擾乱検知部51によって電力系統Fの擾乱が無くなったことが検知されてから第2所定時間ΔtM2、マスク処理が行われている。この第2所定時間ΔtM2は、電力系統Fの正相電圧v1の振幅V1、及び逆相電圧v2の振幅V2が所定値未満になるまでの時間である。
図7Bに示す例では、時刻t4に電力系統Fの擾乱が無くなり、それが時刻t5において検知され、時刻t5~t6においてマスク処理が行われている。つまり、擾乱検知部51によって電力系統Fの擾乱が無くなったことが検知されてから第2所定時間ΔtM2、マスク処理が行われている。この第2所定時間ΔtM2は、電力系統Fの正相電圧v1の振幅V1、及び逆相電圧v2の振幅V2が所定値未満になるまでの時間である。
なお、第2所定時間ΔtM2は、前記した第1所定時間ΔtM1(図7A参照)と同一であってもよいし、また、第1所定時間ΔtM1とは異なる値であってもよい。
<効果>
第1実施形態によれば、電力系統Fの擾乱が検知された直後や、電力系統Fが正常に戻ったことが検知された直後にマスク処理が行われる。これによって、不適切な(例えば、その実効値が過剰に大きい)電流指令値iM *に基づく電力変換を防止し、ひいては、電力系統Fに過電流が流れることを防止できる。
第1実施形態によれば、電力系統Fの擾乱が検知された直後や、電力系統Fが正常に戻ったことが検知された直後にマスク処理が行われる。これによって、不適切な(例えば、その実効値が過剰に大きい)電流指令値iM *に基づく電力変換を防止し、ひいては、電力系統Fに過電流が流れることを防止できる。
図10は、第1実施形態における電力系統Fの電圧、電力変換装置100から電力系統Fへの出力電流、及び電力系統Fに供給される有効電力の変化を示す説明図である。
なお、図10の出力電流や有効電力における破線は、マスク処理を行わない場合の比較例である。
なお、図10の出力電流や有効電力における破線は、マスク処理を行わない場合の比較例である。
図10に示す例では、時刻t21に発生した電力系統Fの擾乱が時刻t22に検知され、時刻t22~t23においてマスク処理が行われている。また、時刻t24に電力系統Fの擾乱が無くなり、これが時刻t25に検知され、時刻t25~t26においてマスク処理が行われている。なお、時刻t23~t25の期間では、最大電力制御が行われている。
図10に示す例では、マスク処理が行われている期間において、電流指令値IM
*(実効値)がゼロに設定されている。その結果、マスク処理の開始直後から出力電流がゼロに低下し、また、電力系統Fへの有効電力がゼロに低下している。このように有効電力が一時的にゼロになったとしても、その後に最大電力制御に切り替えられるため、電力系統Fへの悪影響はほとんどない。
なお、図10に示す例では、マスク処理が行われない比較例(破線)の出力電流が比較的小さいが、場合によっては、この出力電流が過大になることもある。これに対して本実施形態では、電力系統Fの状態が正常・擾乱の一方から他方に変化した直後にマスク処理が行われるため、電力系統Fへの出力電流が過大になることを防止できる。
≪第2実施形態≫
第2実施形態は、最大電力制御における電流指令値i*の算出方法が第1実施形態とは異なっているが、その他(電力変換装置100の構成等:図1~図5参照)については第1実施形態と同様である。したがって、第1実施形態と異なる部分について説明し、重複する部分については説明を省略する。
第2実施形態は、最大電力制御における電流指令値i*の算出方法が第1実施形態とは異なっているが、その他(電力変換装置100の構成等:図1~図5参照)については第1実施形態と同様である。したがって、第1実施形態と異なる部分について説明し、重複する部分については説明を省略する。
図11は、FRT処理部50の最大電力制御部52が実行する最大電力制御のフローチャートである。なお、第1実施形態(図8参照)と同様の処理には、同一のステップ番号を付している。
ステップS1051aにおいて最大電力制御部52は、最大有効電力PmaxZPRを算出する。この最大有効電力PmaxZPRの算出方法等について説明する。
ステップS1051aにおいて最大電力制御部52は、最大有効電力PmaxZPRを算出する。この最大有効電力PmaxZPRの算出方法等について説明する。
前記したように、電力系統Fの擾乱中、電力系統Fの電圧vには逆相電圧v2が含まれている(式(2)を参照)。したがって、電力変換装置100を介して電力系統Fに供給される有効電力Pには、電圧vの基本周波数(ω/2π)を基準として、その2倍の周波数(ω/π)のリップルが含まれていることが多い(式(2)~(4)、式(6)を参照)。仮に、有効電力Pに大きなリップルが含まれていると、電力系統Fに接続された別の発電所(図示せず)において、発電機(図示せず)のシャフトにねじれの応力を招く可能性がある。また、有効電力Pにリップルが含まれていると、電力変換装置100の直流側の電圧が変動し、最大電力制御における追従動作に悪影響を与える可能性がある。したがって、有効電力Pのリップルは、小さいほうが望ましい。
また、第1実施形態で説明したように、式(3)の移動平均V1calは正相電圧v1の振幅V1に略一致し、また、式(4)の移動平均V2calは逆相電圧v2の振幅V2に略一致する。したがって、式(3)、(4)の算出結果、及び式(5)の正相電流i1・逆相電流i2に基づいて、有効電力Pのリップルは、以下の式(10)で表される。
有効電力Pのリップルを低減するために、最大電力制御部52は、後記する第1条件及び第2条件に基づいて、最大有効電力PmaxZPRを算出する。なお、最大有効電力PmaxZPRとは、太陽電池アレイEから電力変換回路10を介して電力系統Fに出力される有効電力の閾値である。
第1条件は、太陽電池アレイEから電力変換回路10を介して電力系統Fに出力される有効電力Pのリップルがゼロに等しいという条件である。これは、以下の式(11)で表される。
第2条件は、電力系統Fにおける電流ia,ib,ic(瞬時値)のピーク値の最大値が所定値に等しいという条件である。この所定値は、太陽電池アレイEから電力変換回路10を介して電力系統Fに出力し得る電流の上限値Imax以下の値であり、予め設定されている。第2実施形態では、以下の式(12)に示すように、電流ia,ib,ic(瞬時値)のピーク値の最大値が上限値Imaxに等しくなるようにしている。なお、式(12)の「^」は、三相の電流ia,ib,icのそれぞれのピーク値を表している。
式(11)で表される第1条件、及び、式(12)で表される第2条件に基づいて、最大有効電力PmaxZPRが算出される。また、最大有効電力PmaxZPRを与える係数K1,K2(以下、K1PmaxZPR,K2PmaxZPRと記す。)も算出される。
図11のステップS1052において最大電力制御部52は、太陽電池アレイEの発電能力PMPPTを算出する。
ステップS1053aにおいて最大電力制御部52は、太陽電池アレイEの発電能力PMPPTが最大有効電力PmaxZPR以上であるか否かを判定する。太陽電池アレイEの発電能力PMPPTが最大有効電力PmaxZPR以上である場合(S1053a:Yes)、最大電力制御部52の処理はステップS1054aに進む。
ステップS1054aにおいて最大電力制御部52は、MPモードを実行する。
ステップS1054aにおいて最大電力制御部52は、MPモードを実行する。
図12Aは、電力変換装置100におけるMPモードの説明図である。
図12Aに示すように、太陽電池アレイEの発電能力PMPPTが最大有効電力PmaxZPR以上である場合(S1053a:Yes)、最大有効電力PmaxZPRに対応する電流指令値i*が、電流指令値iM *として制御部40に出力される。これが、ステップS1054aの「MPモード」である。
図12Aに示すように、太陽電池アレイEの発電能力PMPPTが最大有効電力PmaxZPR以上である場合(S1053a:Yes)、最大有効電力PmaxZPRに対応する電流指令値i*が、電流指令値iM *として制御部40に出力される。これが、ステップS1054aの「MPモード」である。
この「MPモード」において最大電力制御部52は、以下の式(13)に示すように、係数K1,K2を設定する。この係数K1,K2、及び第1実施形態で説明した式(5)に基づいて電流指令値i*が算出され、電力系統Fに最大有効電力PmaxZPRが供給される。

一方、ステップS1053aにおいて太陽電池アレイEの発電能力PMPPTが最大有効電力PmaxZPR未満である場合(S1053a:No)、最大電力制御部52の処理はステップS1055aに進む。
ステップS1055aにおいて最大電力制御部52は、MCモードを実行する。
ステップS1055aにおいて最大電力制御部52は、MCモードを実行する。
図12Bは、電力変換装置100におけるMCモードの説明図である。
図12Bに示すように、太陽電池アレイEの発電能力PMPPTが最大有効電力PmaxZPR未満である場合(S1053a:No)、太陽電池アレイEの発電能力PMPPTに対応する電流指令値i*が、電流指令値iM *として制御部40に出力される。これが、ステップS1055aの「MCモード」である。
図12Bに示すように、太陽電池アレイEの発電能力PMPPTが最大有効電力PmaxZPR未満である場合(S1053a:No)、太陽電池アレイEの発電能力PMPPTに対応する電流指令値i*が、電流指令値iM *として制御部40に出力される。これが、ステップS1055aの「MCモード」である。
この「MCモード」において最大電力制御部52は、以下の式(14)が満たされるように係数K1,K2を設定する。

この式(14)に基づき、係数K1,K2に関して、以下の式(15)が導かれる。この係数K1,K2、及び第1実施形態で説明した式(5)に基づいて電流指令値i*が算出され、太陽電池アレイEの発電能力PMPPTに略等しい有効電力が、電力変換装置100を介して電力系統Fに供給される。

<効果>
第2実施形態によれば、最大電力制御の実行中、電力系統Fに供給される有効電力のリップルを抑制できる。つまり、電力系統Fに有効電力を安定的に供給できるため、電力系統Fに接続された別の発電所(図示せず)において、発電機(図示せず)のシャフトにおけるねじれの応力を抑制できる。また、最大電力制御に基づく追従動作が適切に行われる。
第2実施形態によれば、最大電力制御の実行中、電力系統Fに供給される有効電力のリップルを抑制できる。つまり、電力系統Fに有効電力を安定的に供給できるため、電力系統Fに接続された別の発電所(図示せず)において、発電機(図示せず)のシャフトにおけるねじれの応力を抑制できる。また、最大電力制御に基づく追従動作が適切に行われる。
図13は、第2実施形態における電力系統Fの電圧、電力変換装置100から電力系統Fへの出力電流、及び電力系統Fに供給される有効電力の変化を示す説明図である。
なお、図13の出力電流や有効電力における破線は、マスク処理を行わない場合の比較例である。
なお、図13の出力電流や有効電力における破線は、マスク処理を行わない場合の比較例である。
図13に示す例では、時刻t31に発生した電力系統Fの擾乱が時刻t32に検知され、時刻t32~t33においてマスク処理が行われている。また、時刻t34に電力系統Fの擾乱が無くなり、これが時刻t35に検知され、時刻t35~t36においてマスク処理が行われている。なお、時刻t33~t35の期間では、最大電力制御が行われている。
図13に示すように、最大電力制御が行われている時刻t33~t35の期間では、第1実施形態(図10の時刻t23~t25の期間)と比べて、有効電力のリップルが抑制され、電力系統Fに有効電力が安定的に供給されている。
≪変形例≫
以上、本発明に係る電力変換装置100について各実施形態により説明したが、本発明はこれらの記載に限定されるものではなく、種々の変更を行うことができる。
また、各実施形態では、振幅V1,V2の変動幅が所定値Δvconst未満になるまでマスク処理が行われる場合について説明したが(図7A、図7B参照)、これに限らない。すなわち、電力系統Fの擾乱の検知後にマスク処理が行われる「第1所定時間」、及び、電力系統Fの擾乱が無くなったことが検知されてからマスク処理が行われる「第2所定時間」が、固定値として予め設定されていてもよい。この場合において、「第1所定時間」及び「第2所定時間」は、電力系統Fの正常時における電力系統Fの電圧vの半周期以上の時間に設定される。これは、前記した移動平均V1cal,V2calの演算周期を確保するためである。
以上、本発明に係る電力変換装置100について各実施形態により説明したが、本発明はこれらの記載に限定されるものではなく、種々の変更を行うことができる。
また、各実施形態では、振幅V1,V2の変動幅が所定値Δvconst未満になるまでマスク処理が行われる場合について説明したが(図7A、図7B参照)、これに限らない。すなわち、電力系統Fの擾乱の検知後にマスク処理が行われる「第1所定時間」、及び、電力系統Fの擾乱が無くなったことが検知されてからマスク処理が行われる「第2所定時間」が、固定値として予め設定されていてもよい。この場合において、「第1所定時間」及び「第2所定時間」は、電力系統Fの正常時における電力系統Fの電圧vの半周期以上の時間に設定される。これは、前記した移動平均V1cal,V2calの演算周期を確保するためである。
また、各実施形態では、電力系統Fの擾乱が検知されてから、振幅V1,V2の変動幅が所定値Δvconst未満になるまでマスク処理が行われる場合について説明したが、これに限らない。すなわち、振幅V1,V2のうち少なくとも一方の振幅の変動幅が所定値Δvconst未満になるまで、マスク処理を実行するようにしてもよい。正相電圧v1の振幅V1、及び逆相電圧v2の振幅V2の一方が変動しているときには、他方も変動していることが多いからである。
また、各実施形態では、電力系統Fが擾乱・正常の一方から他方に変化した直後にマスク処理が行われる場合について説明したが、これに限らない。例えば、電力系統Fで擾乱が発生した直後にマスク処理を行い、電力系統Fが正常に戻った直後はマスク処理を行わないようにしてもよい。
また、各実施形態では、マスク処理中の電流指令値iM
*である所定値i0がゼロに設定される場合について説明したが、これに限らない。すなわち、ゼロよりも大きい所定値i0が、予め記憶部54に記憶されていてもよい。
また、各実施形態では、マスク処理中においても、最大電力制御部52によって電流指令値i*の算出が繰り返される場合について説明したが、これに限らない。すなわち、マスク処理中は、FRT処理部50が、最大電力制御部52による電流指令値i*の算出処理を停止させてもよい。このようにしても、各実施形態と同様の効果が奏される。
また、各実施形態では、通常制御(S101:図6参照)や最大電力制御(S105:同図参照)において、FRT処理部50が「山登り法」を行う場合について説明したが、これに限らない。すなわち、FRT処理部50が「スキャン法」等の他の周知の方法を行うようにしてもよい。なお、「スキャン法」とは、太陽電池アレイEのP-V特性における動作点を所定の電圧範囲で移動させ、発電電力の最大値を与える動作点を特定する方法である。これによって、太陽電池アレイEのP-V特性において極大点が複数存在する場合でも、最大限の発電電力を電力系統Fに供給できる。
また、各実施形態は、太陽光発電用のPCSの他、風力発電用のPCSにも適用できる。なお、風力発電用のPCSは、風力発電機(分散型電源)の発電電力(交流電力)を直流電力に変換するコンバータ(図示せず)と、コンバータから入力される直流電力を所定の交流電力に変換し、この交流電力を電力系統Fに出力するインバータ(図示せず)と、を備えている。
また、各実施形態では、制御部40及びFRT処理部50を別構成として記載したが、これらを一つのコントローラとして構成してもよい。
また、第2実施形態では、前記した「第2条件」として、電力系統Fにおける電流ia,ib,ic(瞬時値)のピーク値の最大値を所定値(上限値Imax)に等しくする場合について説明したが、これに限らない。すなわち、「第2条件」として、電力系統Fの電流(例えば、電流ia)の瞬時値のピーク値を所定値に等しくするようにしてもよい。
また、各実施形態は本発明を分かりやすく説明するために詳細に記載したものであり、必ずしも説明した全ての構成を備えるものに限定されない。また、実施形態の構成の一部について、他の構成の追加・削除・置換をすることが可能である。また、前記した機構や構成は説明上必要と考えられるものを示しており、製品上必ずしも全ての機構や構成を示しているとは限らない。
100 電力変換装置
10 電力変換回路
20 電圧検出器
30 電流検出器
40 制御部
50 FRT処理部
51 擾乱検知部
52 最大電力制御部
53 マスク処理部
54 記憶部
E 太陽電池アレイ(分散型電源)
F 電力系統
10 電力変換回路
20 電圧検出器
30 電流検出器
40 制御部
50 FRT処理部
51 擾乱検知部
52 最大電力制御部
53 マスク処理部
54 記憶部
E 太陽電池アレイ(分散型電源)
F 電力系統
Claims (8)
- 分散型電源の発電電力を交流電力に変換し、前記交流電力を電力系統に出力する電力変換回路と、
前記電力系統の電圧に基づいて、前記電力系統の擾乱の有無を検知する擾乱検知部と、
前記電力変換回路を介して前記電力系統に出力される電流の指令値である電流指令値に基づいて、前記電力変換回路を制御する制御部と、
前記擾乱検知部によって前記電力系統の擾乱が検知されてから第1所定時間、前記電流指令値の実効値を、前記電力系統の正常時よりも小さな値に設定するマスク処理を実行するマスク処理部と、を備えること
を特徴とする電力変換装置。 - 前記第1所定時間は、前記電力系統の電圧の正相成分である正相電圧、及び、前記電力系統の電圧の逆相成分である逆相電圧のうち少なくとも一方の振幅の変動幅が所定値未満になるまでの時間であること
を特徴とする請求項1に記載の電力変換装置。 - 前記マスク処理部は、前記擾乱検知部によって前記電力系統の擾乱が無くなったことが検知されてから第2所定時間、前記電流指令値の実効値を、前記電力系統の正常時よりも小さな値に設定する別のマスク処理を実行すること
を特徴とする請求項1に記載の電力変換装置。 - 前記第2所定時間は、前記電力系統の電圧の正相成分である正相電圧、及び、前記電力系統の電圧の逆相成分である逆相電圧のうち少なくとも一方の振幅の変動幅が所定値未満になるまでの時間であること
を特徴とする請求項3に記載の電力変換装置。 - 前記分散型電源は、太陽電池アレイであり、
前記擾乱検知部によって前記電力系統の擾乱が検知された直後の前記マスク処理と、前記電力系統の擾乱が無くなったことが検知された直後の前記別のマスク処理と、の間の期間に最大電力制御を実行する最大電力制御部を備え、
前記最大電力制御部は、
前記太陽電池アレイの電力‐電圧特性における極大点付近の発電電力と、前記電力変換回路を介して前記電力系統に出力し得る最大限の有効電力と、の大小を比較し、
前記極大点付近の発電電力が前記最大限の有効電力以上である場合には、前記最大限の有効電力に対応する前記電流指令値を前記制御部に出力し、
前記極大点付近の発電電力が前記最大限の有効電力未満である場合には、前記極大点付近の発電電力に対応する前記電流指令値を前記制御部に出力すること
を特徴とする請求項3に記載の電力変換装置。 - 前記分散型電源は、太陽電池アレイであり、
前記擾乱検知部によって前記電力系統の擾乱が検知された直後の前記マスク処理と、前記電力系統の擾乱が無くなったことが検知された直後の前記別のマスク処理と、の間の期間に最大電力制御を実行する最大電力制御部を備え、
前記最大電力制御部は、
前記太陽電池アレイから前記電力変換回路を介して前記電力系統に出力される有効電力のリップルがゼロに等しいという第1条件と、
前記電力系統の電流の瞬時値のピーク値が所定値に等しいという第2条件と、に基づいて、前記太陽電池アレイから前記電力変換回路を介して前記電力系統に出力される有効電力の閾値を算出し、
前記太陽電池アレイの電力‐電圧特性における極大点付近の発電電力が前記閾値以上である場合には、前記閾値に対応する前記電流指令値を前記制御部に出力し、
前記極大点付近の発電電力が前記閾値未満である場合には、前記極大点付近の発電電力に対応する前記電流指令値を前記制御部に出力すること
を特徴とする請求項3に記載の電力変換装置。 - 前記第1所定時間及び前記第2所定時間は、前記電力系統の正常時における前記電力系統の電圧の半周期以上の時間であること
を特徴とする請求項3に記載の電力変換装置。 - 分散型電源の発電電力を交流電力に変換し、前記交流電力を電力系統に出力する電力変換回路の電力変換方法であって、
前記電力系統の電圧に基づいて、前記電力系統の擾乱の有無を検知する擾乱検知処理と、
前記電力変換回路を介して前記電力系統に出力される電流の指令値である電流指令値に基づいて、前記電力変換回路を制御する制御処理と、
前記擾乱検知処理によって前記電力系統の擾乱が検知されてから第1所定時間、前記電流指令値の実効値を、前記電力系統の正常時よりも小さな値に設定するマスク処理と、を含むこと
を特徴とする電力変換方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2016/079504 WO2018066070A1 (ja) | 2016-10-04 | 2016-10-04 | 電力変換装置及び電力変換方法 |
| TW106133992A TWI657634B (zh) | 2016-10-04 | 2017-10-02 | 電力變換裝置及電力變換方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2016/079504 WO2018066070A1 (ja) | 2016-10-04 | 2016-10-04 | 電力変換装置及び電力変換方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018066070A1 true WO2018066070A1 (ja) | 2018-04-12 |
Family
ID=61831368
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/079504 WO2018066070A1 (ja) | 2016-10-04 | 2016-10-04 | 電力変換装置及び電力変換方法 |
Country Status (2)
| Country | Link |
|---|---|
| TW (1) | TWI657634B (ja) |
| WO (1) | WO2018066070A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20220334151A1 (en) * | 2019-11-05 | 2022-10-20 | Toshiba Mitsubishi-Electric Industrial Systems Corporation | Open-phase detection circuit and power conversion apparatus |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN118633235A (zh) * | 2022-01-31 | 2024-09-10 | 三菱电机株式会社 | 电力变换装置以及电力变换系统 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012231606A (ja) * | 2011-04-26 | 2012-11-22 | Fuji Electric Co Ltd | 系統連系電力変換装置 |
| JP2013162699A (ja) * | 2012-02-08 | 2013-08-19 | Mitsubishi Electric Corp | 分散型電源システム及び電力変換装置 |
| JP2016063576A (ja) * | 2014-09-16 | 2016-04-25 | 日新電機株式会社 | 系統連系用電力変換装置の制御装置、及び系統連系用電力変換装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101950985B (zh) * | 2010-11-01 | 2013-07-03 | 上海兆能电力电子技术有限公司 | 单相并网光伏逆变器输出谐波及直流分量的抑制方法 |
| CN102904273B (zh) * | 2011-07-29 | 2015-05-20 | 通用电气公司 | 能量转换系统的最大功率点追踪控制和相关方法 |
| TWM501038U (zh) * | 2014-11-14 | 2015-05-11 | Univ Nat United | 提升供電效能的電網系統 |
-
2016
- 2016-10-04 WO PCT/JP2016/079504 patent/WO2018066070A1/ja active Application Filing
-
2017
- 2017-10-02 TW TW106133992A patent/TWI657634B/zh not_active IP Right Cessation
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012231606A (ja) * | 2011-04-26 | 2012-11-22 | Fuji Electric Co Ltd | 系統連系電力変換装置 |
| JP2013162699A (ja) * | 2012-02-08 | 2013-08-19 | Mitsubishi Electric Corp | 分散型電源システム及び電力変換装置 |
| JP2016063576A (ja) * | 2014-09-16 | 2016-04-25 | 日新電機株式会社 | 系統連系用電力変換装置の制御装置、及び系統連系用電力変換装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20220334151A1 (en) * | 2019-11-05 | 2022-10-20 | Toshiba Mitsubishi-Electric Industrial Systems Corporation | Open-phase detection circuit and power conversion apparatus |
| US12140613B2 (en) * | 2019-11-05 | 2024-11-12 | Tmeic Corporation | Open-phase detection circuit and power conversion apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| TW201814999A (zh) | 2018-04-16 |
| TWI657634B (zh) | 2019-04-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10971991B2 (en) | Power conversion device and power conversion system | |
| JP6490249B2 (ja) | 電力変換装置および電力変換システム | |
| JP5365058B2 (ja) | コンバータの制御方法 | |
| WO2016017244A1 (ja) | 電力変換制御装置および太陽光発電システム | |
| JP6159271B2 (ja) | 電力変換装置および電力変換装置の制御方法 | |
| JP2020068650A5 (ja) | 電力変換装置 | |
| WO2018066070A1 (ja) | 電力変換装置及び電力変換方法 | |
| JP5776308B2 (ja) | 系統連系電力変換装置 | |
| JP5580377B2 (ja) | 静止型無効電力補償装置及び電圧制御方法 | |
| JP5979404B1 (ja) | 分散型電源の制御方法及び制御装置 | |
| JP6437807B2 (ja) | インバータ回路を制御する制御回路、および、当該制御回路を備えたインバータ装置 | |
| WO2013123433A2 (en) | Negative sequence current compensation controller and method for power conversion system | |
| CN106385197A (zh) | 一种逆变器独立运行的输出电压控制方法及控制器 | |
| JP2009247136A (ja) | 電力変換装置およびその高調波電流抑制方法 | |
| CN110474406B (zh) | 一种电动汽车充电桩前级整流器的控制方法 | |
| JP6220895B2 (ja) | インバータ制御装置 | |
| JP6258806B2 (ja) | 系統連系用電力変換装置 | |
| JP6119297B2 (ja) | 周期性外乱抑制制御装置 | |
| Xiong et al. | Generalized internal model control strategy for vehicular single-phase PWM rectifiers under parametric uncertainties | |
| Yang et al. | Stability investigation of three-phase grid-tied PV inverters with impedance-based method | |
| JP7383208B1 (ja) | 電力変換装置 | |
| JP2024034325A (ja) | 電力変換装置、太陽光発電システム、及び電力変換方法 | |
| WO2022085101A1 (ja) | 無効電力補償装置 | |
| JP4533688B2 (ja) | 電力変換装置 | |
| Jin et al. | Resonance suppression of LCL grid-connected inverter based on dual MPC loops |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16918269 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 16918269 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: JP |