WO2018037822A1 - Dynamic pressure bearing and method for manufacturing same - Google Patents
Dynamic pressure bearing and method for manufacturing same Download PDFInfo
- Publication number
- WO2018037822A1 WO2018037822A1 PCT/JP2017/027187 JP2017027187W WO2018037822A1 WO 2018037822 A1 WO2018037822 A1 WO 2018037822A1 JP 2017027187 W JP2017027187 W JP 2017027187W WO 2018037822 A1 WO2018037822 A1 WO 2018037822A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- dynamic pressure
- bearing
- molding
- groove
- axial direction
- Prior art date
Links
Images














Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C17/00—Sliding-contact bearings for exclusively rotary movement
- F16C17/10—Sliding-contact bearings for exclusively rotary movement for both radial and axial load
- F16C17/102—Sliding-contact bearings for exclusively rotary movement for both radial and axial load with grooves in the bearing surface to generate hydrodynamic pressure
- F16C17/107—Sliding-contact bearings for exclusively rotary movement for both radial and axial load with grooves in the bearing surface to generate hydrodynamic pressure with at least one surface for radial load and at least one surface for axial load
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B21—MECHANICAL METAL-WORKING WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21D—WORKING OR PROCESSING OF SHEET METAL OR METAL TUBES, RODS OR PROFILES WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21D17/00—Forming single grooves in sheet metal or tubular or hollow articles
- B21D17/02—Forming single grooves in sheet metal or tubular or hollow articles by pressing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B21—MECHANICAL METAL-WORKING WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21D—WORKING OR PROCESSING OF SHEET METAL OR METAL TUBES, RODS OR PROFILES WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21D53/00—Making other particular articles
- B21D53/10—Making other particular articles parts of bearings; sleeves; valve seats or the like
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C17/00—Sliding-contact bearings for exclusively rotary movement
- F16C17/04—Sliding-contact bearings for exclusively rotary movement for axial load only
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C17/00—Sliding-contact bearings for exclusively rotary movement
- F16C17/10—Sliding-contact bearings for exclusively rotary movement for both radial and axial load
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C33/00—Parts of bearings; Special methods for making bearings or parts thereof
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C33/00—Parts of bearings; Special methods for making bearings or parts thereof
- F16C33/02—Parts of sliding-contact bearings
- F16C33/04—Brasses; Bushes; Linings
- F16C33/06—Sliding surface mainly made of metal
- F16C33/14—Special methods of manufacture; Running-in
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C33/00—Parts of bearings; Special methods for making bearings or parts thereof
- F16C33/02—Parts of sliding-contact bearings
- F16C33/04—Brasses; Bushes; Linings
- F16C33/06—Sliding surface mainly made of metal
- F16C33/14—Special methods of manufacture; Running-in
- F16C33/145—Special methods of manufacture; Running-in of sintered porous bearings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/16—Means for supporting bearings, e.g. insulating supports or means for fitting bearings in the bearing-shields
- H02K5/167—Means for supporting bearings, e.g. insulating supports or means for fitting bearings in the bearing-shields using sliding-contact or spherical cap bearings
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2204/00—Metallic materials; Alloys
- F16C2204/10—Alloys based on copper
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2220/00—Shaping
- F16C2220/20—Shaping by sintering pulverised material, e.g. powder metallurgy
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2220/00—Shaping
- F16C2220/40—Shaping by deformation without removing material
- F16C2220/46—Shaping by deformation without removing material by forging
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2220/00—Shaping
- F16C2220/40—Shaping by deformation without removing material
- F16C2220/48—Shaping by deformation without removing material by extrusion, e.g. of metallic profiles
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2324/00—Apparatus used in printing
- F16C2324/16—Printing machines
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2360/00—Engines or pumps
- F16C2360/46—Fans, e.g. ventilators
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2370/00—Apparatus relating to physics, e.g. instruments
- F16C2370/12—Hard disk drives or the like
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2380/00—Electrical apparatus
- F16C2380/26—Dynamo-electric machines or combinations therewith, e.g. electro-motors and generators
Definitions
- the present invention relates to a dynamic pressure bearing, and more particularly to a dynamic pressure bearing in which a dynamic pressure groove is formed on an end surface, and a method for manufacturing the same.
- a dynamic pressure bearing is a fluid pressure generated in a bearing gap between a relatively rotating shaft member and supports the shaft member in a non-contact manner.
- a dynamic pressure groove that generates a dynamic pressure in a lubricating fluid (for example, lubricating oil) filled in the bearing gap may be formed on the inner peripheral surface and the end surface of the dynamic pressure bearing.
- the dynamic pressure groove extends along a direction intersecting the circumferential direction (the relative rotation direction of the shaft member), and the flow direction of the lubricating fluid in the bearing gap flowing in the circumferential direction with the relative rotation of the shaft member is determined by the dynamic pressure groove. By correcting, the lubricating fluid is collected and the fluid pressure is increased.
- Patent Document 1 discloses a method in which dynamic pressure grooves are molded on the inner peripheral surface and end surface of a cylindrical sintered body.
- the circumferential dimension ratio between the dynamic pressure groove and the hill formed between the circumferential directions is constant (for example, 1: 1).
- the dynamic pressure groove formed on the end surface (thrust bearing surface) of the dynamic pressure bearing if the circumferential dimension ratio between the dynamic pressure groove and the hill portion is constant, the dynamic pressure groove and The circumferential width is increased (see FIG. 4).
- the amount of strain (plastic deformation) generated in the hill when the mold is pressed differs depending on the radial position. So-called “sag” is likely to occur, where the height of the portion 101 decreases as it goes to the outer diameter side.
- the groove depth of the dynamic pressure groove 102 becomes shallower toward the outer diameter side, the vicinity of the outer diameter end of the dynamic pressure groove 102 has the ability to correct the flow direction of the lubricating fluid (that is, the ability to collect the lubricating fluid). ) Is reduced, and the effect of improving the pressure by the dynamic pressure groove 102 may not be sufficiently exhibited.
- an object of the present invention is to enhance the pressure improvement effect by the dynamic pressure grooves formed on the end face of the dynamic pressure bearing.
- the dynamic pressure bearing according to the present invention has a dynamic pressure groove formed on the end surface on one axial side, and the groove bottom surface of the dynamic pressure groove faces the outer diameter side in the other axial direction. Inclined to the side.
- the groove bottom surface of the dynamic pressure groove molded on the end surface on one side in the axial direction is directed toward the outer diameter side on the other side in the axial direction (side where the groove depth is increased). Tilted.
- a so-called “sag” occurs in which the top surface of the hill portion is inclined toward the other side in the axial direction toward the outer diameter side, it is possible to ensure a groove depth of a predetermined value or more over the entire dynamic pressure groove. it can.
- the ability to collect the lubricating fluid over the entire region of the dynamic pressure groove is exhibited, so that the fluid pressure in the bearing gap can be sufficiently increased.
- the above hydrodynamic bearing can be formed of, for example, a sintered body.
- the spring back amount is larger than that in the case where the dynamic pressure groove is molded in the molten material. Therefore, it is particularly effective to incline the bottom surface of the dynamic pressure groove as described above.
- the groove bottom surface of the other dynamic pressure groove is inclined toward one side in the axial direction toward the outer diameter side. It is preferable to make it. As a result, the ability to collect the lubricating fluid in the entire area of the other dynamic pressure grooves is exhibited, so that the lubricating fluid in the other bearing gap facing the other axial end surface of the dynamic pressure bearing can be sufficiently increased.
- the above hydrodynamic bearing can be incorporated into a fluid dynamic bearing device.
- the hydrodynamic bearing has a shaft portion inserted in an inner periphery of the hydrodynamic bearing, and a flange portion projecting to the outer diameter side from the shaft portion, and is relatively rotated with respect to the hydrodynamic bearing.
- a fluid dynamic pressure bearing device including a thrust bearing portion that relatively supports the shaft member in a thrust direction with a fluid pressure generated in a thrust bearing gap between an end surface on one axial side of the bearing and an end surface of the flange portion, The fluid pressure in the thrust bearing gap is high, and the bearing rigidity in the thrust direction is high.
- the hydrodynamic groove of the mold is A molding surface for molding the bottom surface of the groove is inclined toward the other side in the axial direction toward the outer diameter side.
- This manufacturing method is a forming die for forming a dynamic pressure groove by pressing against an end face of a bearing material from one side in the axial direction, and a forming surface for forming the groove bottom surface of the dynamic pressure groove is directed toward the outer diameter side.
- it can be performed by using a molding die characterized in that it is inclined to the other side in the axial direction.
- the depth of the concave portion for molding the hill portion provided between the circumferential directions of the dynamic pressure grooves in the molding die is made deeper toward the outer diameter side.
- the bottom surface of the recess is preferably a flat surface orthogonal to the axial direction. Since the hill portion formed by this concave portion becomes higher as it goes to the outer diameter side, even if a springback occurs during subsequent release, the groove depth of the dynamic pressure groove near the outer diameter end (that is, the height of the hill portion). Can be secured.
- the groove depth of the dynamic pressure groove molded on the end face of the dynamic pressure bearing is ensured in the entire region, the effect of improving the pressure by the dynamic pressure groove can be enhanced.
- FIG. 1 shows a spindle motor used in an HDD disk drive device.
- This spindle motor is opposed to a fluid dynamic pressure bearing device 1 having a dynamic pressure bearing 8 according to an embodiment of the present invention and a bracket 6 to which the fluid dynamic pressure bearing device 1 is attached via a radial gap.
- the stator coil 4 and the rotor magnet 5 are provided.
- the stator coil 4 is attached to the bracket 6, and the rotor magnet 5 is attached to the hub 3 of the fluid dynamic bearing device 1.
- a predetermined number of disks (not shown) are mounted on the hub 3.
- the stator coil 4 When the stator coil 4 is energized, the rotor magnet 5 is rotated by the electromagnetic force between the stator coil 4 and the rotor magnet 5, whereby the hub 3 and the disk are rotated together.
- the fluid dynamic pressure bearing device 1 is rotatably supported by a dynamic pressure bearing 8, a bottomed cylindrical housing 7 that holds the dynamic pressure bearing 8 on the inner periphery, and the dynamic pressure bearing 8.
- the shaft member includes a shaft portion 2 inserted in the inner periphery of the dynamic pressure bearing 8, a flange portion 9 provided at one end of the shaft portion 2, and the other provided at the other end of the shaft portion 2. And a hub 3 as a flange portion.
- the opening side of the housing 7 in the axial direction is the upper side and the closing side is the lower side.
- the shaft portion 2 is made of, for example, metal and has a straight cylindrical outer peripheral surface 2a having no irregularities.
- the flange portion 9 is made of metal, for example, and protrudes from the lower end of the shaft portion 2 to the outer diameter side.
- the end surfaces 9a and 9b on both sides in the axial direction of the flange portion 9 are flat surfaces without any unevenness.
- the hub 3 is made of, for example, metal, and includes a disc portion 3a that protrudes from the upper end of the shaft portion 2 to the outer diameter side, a cylindrical portion 3b that extends downward in the axial direction from the outer diameter end of the disc portion 3a, and a cylindrical portion 3b.
- the flange portion 3c further extends from the lower end portion to the outer diameter, and the cylindrical annular projecting portion 3d extends downward from the substantially central portion in the radial direction of the disk portion 3a.
- a disc (not shown) is mounted on the upper end surface of the flange 3c.
- the hub 3 is integrally formed.
- the hub 3 may be formed of a plurality of members, for example, the annular protrusion 3d may be formed of another member.
- the dynamic pressure bearing 8 is formed in a cylindrical shape with metal or resin.
- the hydrodynamic bearing 8 is a sintered metal, for example, a sintered metal containing a relatively large amount of copper (for example, 20% by mass or more), specifically, a copper-based sintered metal mainly composed of copper, or copper. And a copper-iron-based sintered metal containing iron as a main component.
- a dynamic pressure groove is formed on the inner peripheral surface 8 a of the dynamic pressure bearing 8.
- herringbone-shaped dynamic pressure grooves 8a1 and 8a2 are formed in two regions separated in the axial direction of the inner peripheral surface 8a of the dynamic pressure bearing 8 (cross hatching). Haoka).
- the upper dynamic pressure groove 8a1 is formed asymmetrically in the axial direction. Specifically, the axial dimension of the region above the annular hill at the approximate center in the axial direction is lower than the annular hill. It is larger than the axial dimension of the side region.
- the lower dynamic pressure groove 8a2 is formed symmetrically in the axial direction.
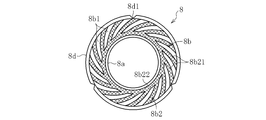
- a dynamic pressure groove 8 b 1 is formed on the upper end surface 8 b of the dynamic pressure bearing 8.
- dynamic pressure grooves 8b1 and hill portions 8b2 are alternately provided in the circumferential direction on the upper end surface 8b of the dynamic pressure bearing 8.
- the dynamic pressure groove 8b1 extends in a direction intersecting the circumferential direction and has, for example, a spiral shape.
- the dynamic pressure groove 8b1 is a pump-in type that pushes lubricating oil into the inner diameter side as the shaft member rotates.
- the dynamic pressure groove 8b1 has a pump-in type spiral shape inclined toward the inner diameter side toward the downstream side in the fluid flow direction (arrow direction in the figure) when the shaft member rotates.
- the dynamic pressure groove 8b1 and the hill portion 8b2 are both provided at the inner diameter end and outer diameter end of the upper end surface 8b of the dynamic pressure bearing 8 (specifically, at the boundary between the upper end surface 8b, the inner peripheral surface 8a, and the outer peripheral surface 8d). Chamfered part).
- the dynamic pressure groove 8b1 and the hill portion 8b2 have a constant dimensional ratio in the circumferential direction in the entire radial direction, and is 1: 1 in the illustrated example. For this reason, the circumferential width of the dynamic pressure groove 8b1 and the hill portion 8b2 gradually increases toward the outer diameter side.
- the upper surface of the hill part 8b2 is inclined downward toward the outer diameter side (right side in the figure). Further, the bottom surface of the dynamic pressure groove 8b1 is inclined downward toward the outer diameter side.
- the groove depth t (the axial distance between the upper surface of the hill portion 8b2 and the groove bottom surface of the dynamic pressure groove 8b1) of the dynamic pressure groove 8b1 is set to a predetermined value or more, for example, 10 ⁇ m or more.
- the inclination angles of the dynamic pressure groove 8b1 and the hill portion 8b2 are exaggerated.
- the axial distance d between the inner diameter end and the outer diameter end of the dynamic pressure groove 8b1 is 1 to It is about 5 ⁇ m.
- the upper end surface 8b of the dynamic pressure bearing 8 is a surface in which the entire region including the dynamic pressure groove 8b1 and the hill portion 8b2 is molded. Further, the upper end surface 8b of the dynamic pressure bearing 8 is subjected not only to molding (forming) before sintering but also to molding (sizing) after sintering. On the other hand, the chamfered portion provided at the boundary between the upper end surface 8b of the dynamic pressure bearing 8 and the inner peripheral surface 8a and the outer peripheral surface 8d is subjected only to molding before sintering, and the molding after sintering is performed. It has not been. For this reason, the upper surface 8b (dynamic pressure groove 8b1 and hill portion 8b2) of the dynamic pressure bearing 8 has a smaller surface opening ratio than the chamfered portion.
- a dynamic pressure groove 8 c 1 as a thrust dynamic pressure generating portion is formed on the lower end surface 8 c of the dynamic pressure bearing 8.
- the specific shapes and the like of the dynamic pressure groove 8c1 and the hill portion 8c2 on the lower end surface 8c are the same as those of the dynamic pressure groove 8b1 and the hill portion 8b2 on the upper end surface 8b, and thus the description thereof is omitted.
- the shape of the dynamic pressure grooves 8b1 and 8c1 is not limited to the above.
- the hill portion 8b2 of the upper end surface 8b of the dynamic pressure bearing 8 includes an inclined hill portion 8b21 provided between the circumferential directions of the spiral dynamic pressure groove 8b1, and an inner diameter of the inclined hill portion 8b21. And an annular land portion 8b22 connecting the ends.
- further improvement of fluid pressure can be expected by providing the land portion 8b22 at the inner diameter end of the hill portion 8b2.
- the dynamic pressure grooves 8b1 and 8c1 are not limited to the pump-in type, and may be a pump-out type that pushes the lubricating fluid to the outer diameter side as the shaft member rotates. Further, the dynamic pressure grooves 8b1 and 8c1 are not limited to the spiral shape, but may be a herringbone shape or a step shape (radial shape).
- An axial groove 8 d 1 is formed on the outer peripheral surface of the dynamic pressure bearing 8.
- the number of the axial grooves 8d1 is arbitrary, and in the illustrated example, three axial grooves 8d1 are arranged at equal intervals in the circumferential direction (see FIGS. 4 and 6).
- the housing 7 is formed in a bottomed cylindrical shape integrally having a side portion 7a and a bottom portion 7b.
- the inner peripheral surface 7a1 of the side portion 7a is formed in a straight cylindrical surface shape, and the outer peripheral surface 8d of the dynamic pressure bearing 8 is fixed by gap bonding, press-fitting, press-fitting with an adhesive interposed therebetween, or the like.
- a tapered surface 7a3 that gradually increases in diameter upward is formed.
- annular seal space S whose radial dimension is gradually reduced upward is formed. The capillary force of the seal space S prevents the lubricating oil filled in the housing 7 from leaking out.
- the fluid dynamic pressure bearing device 1 shown in FIG. 2 is completed by filling the space inside the housing 7 including the internal pores of the dynamic pressure bearing 8 with lubricating oil.
- the oil level is always held inside the seal space S within the range of the assumed operating temperature of the fluid dynamic bearing device 1.
- a radial bearing gap is formed between the inner peripheral surface 8a of the dynamic pressure bearing 8 and the outer peripheral surface 2a of the shaft portion 2, and an oil film generated in the radial bearing gap by the dynamic pressure grooves 8a1 and 8a2.
- the pressure of is increased. Due to the pressure of the oil film (dynamic pressure action), radial bearing portions R1 and R2 are configured to support the shaft portion 2 and the hub 3 in a non-contact manner so as to be rotatable in the radial direction.
- the axial groove 8d1 formed in the outer peripheral surface 8d of the hydrodynamic bearing 8 forms a communication path through which lubricating oil can flow.
- This communication path can prevent a local negative pressure from being generated in the lubricating oil filled in the housing 7.
- the upper dynamic pressure groove 8a1 formed on the inner peripheral surface 8a of the dynamic pressure bearing 8 is formed in an axially asymmetric shape, so that the rotation of the shaft portion 2 is performed.
- the lubricating oil in the radial bearing gap is pushed downward, and the lubricating oil circulates through the communication path, thereby reliably preventing the generation of local negative pressure.
- the hydrodynamic bearing 8 is performed through a mixing process, a compression molding (forming) process, a sintering process, a dimension correction (sizing) process, and a dynamic pressure groove forming (groove sizing) process.
- raw material powder for the hydrodynamic bearing 8 various metal powders are mixed to prepare raw material powder for the hydrodynamic bearing 8.
- metal powder which comprises raw material powder, iron powder, copper powder, tin powder, etc. can be used, for example, and iron powder and copper powder are used in this embodiment.
- a solid lubricant such as graphite or a molding lubricant such as metal soap may be blended in the raw material powder.
- the compression molding step after the above raw material powder is supplied to the forming mold, it is compressed to form a cylindrical green compact.
- the green compact is sintered at a predetermined sintering temperature to obtain a sintered body.
- the sintering temperature is set to less than the melting point of copper (1085 ° C.), for example, 850 to 900 ° C.
- the sintered body is re-compressed with a sizing mold to correct the dimensions of the sintered body (inner diameter, outer diameter, and axial dimension).
- the chamfered portions provided between the both end faces of the sintered body and the outer peripheral face and the inner peripheral face are not molded (not in contact with the sizing mold).
- the dynamic pressure grooves 8a1 and 8a2 shown in FIG. 3 are molded on the inner peripheral surface of the sintered body by a groove sizing die, and the both ends of the sintered body are formed as shown in FIG.
- the dynamic pressure grooves 8b1 and 8c1 shown in FIG. 6 are molded.
- the chamfered portion of the sintered body is not formed (not in contact with the groove sizing mold), as in the dimension correcting step.
- the groove sizing mold includes a core rod 11, an upper punch 12, a lower punch 13, and a die 14 as molds for molding each surface of the sintered body 18.
- Formed portions 11a and 11b having shapes corresponding to the dynamic pressure grooves 8a1 and 8a2 are provided on the outer peripheral surface of the core rod 11.
- the forming surface (lower surface) of the upper punch 12 is provided with a forming portion 12a having a shape corresponding to the dynamic pressure groove 8b1.
- the molding portion 12a includes a groove bottom molding surface 12a1 for molding the groove bottom surface of the dynamic pressure groove 8b1, and a recess 12a2 for molding the hill portion 8b2.
- the groove bottom molding surface 12a1 is inclined downward toward the outer diameter side.
- the bottom surface of the recess 12a2 (that is, the molding surface that molds the top surface of the hill portion 8b2) is substantially parallel to the surface orthogonal to the axial direction. As a result, the depth of the recess 12a2 (the axial distance between the groove bottom molding surface 12a1 and the bottom surface of the recess 12a2) becomes deeper toward the outer diameter side.
- the molding surface (upper surface) of the lower punch 13 is provided with a molding portion 13a having a shape corresponding to the dynamic pressure groove 8c1.
- the molding portion 13a includes a groove bottom molding surface 13a1 for molding the groove bottom surface of the dynamic pressure groove 8c1, and a recess 13a2 for molding the hill portion 8c2.
- the groove bottom molding surface 13a1 is inclined upward toward the outer diameter side.
- the bottom surface of the recess 13a2 (that is, the molding surface that molds the top surface of the hill portion 8c2) is substantially parallel to the surface orthogonal to the axial direction.
- the depth of the recess 13a2 (the axial distance between the groove bottom molding surface 13a1 and the bottom surface of the recess 13a2) becomes deeper toward the outer diameter side.
- the depths of the molding portions 11a, 11b, 12a, and 13a are exaggerated.
- 9, 11, and 13 the inclination angles of the groove bottom molding surfaces 12a1 and 13a1 are exaggerated.
- the core rod 11 is inserted into the inner periphery of the sintered body 18 supported from below by the lower punch 13 to move the inner peripheral surface of the sintered body 18.
- the molding parts 11a and 11b of the core rod 11 are opposed to the pressure groove formation scheduled region.
- the sintered body 18 is pressed into the inner periphery of the die 14 with the upper punch 12 as shown in FIG.
- the inner peripheral surface of the body 18 is pressed against the molding parts 11 a and 11 b of the core rod 11.
- the shape of the molding parts 11a and 11b is transferred to the inner peripheral surface of the sintered body, and the dynamic pressure grooves 8a1 and 8a2 are molded.
- the sintered body 18 is pressed from both sides in the axial direction by the upper punch 12 and the lower punch 13, thereby pressing the molded portions 12 a and 13 a of the punches 12 and 13 against both end surfaces of the sintered body 18.
- the shapes of the molding portions 12a and 13a are transferred to both end faces of the sintered body 18, and the dynamic pressure grooves 8b1 and 8c1 are molded.
- the end surfaces of the sintered body 18 are pressed by the groove bottom forming surfaces 12a1 and 13a1 of the forming portions 12a and 13a of the punches 12 and 13, and the dynamic pressure grooves 8b1 and 8c1 are formed.
- the meat in the vicinity of the end face of the sintered body 18 plastically flows and enters the recesses 12a2 and 13a2 of the molding portions 12a and 13a to form the hill portions 8b2 and 8c2.
- the height of the hill portions 8b2 and 8c2 filled in the recesses 12a2 and 13a2 increases toward the outer diameter side. It is high.
- the sintered body 18 is discharged from the inner periphery of the die 14. Accordingly, the sintered body 18 is spring-backed toward the outer diameter, the inner peripheral surface of the sintered body 18 is peeled off from the molding portions 11a and 11b on the outer peripheral surface of the core rod 11, and the core rod is pulled out from the inner periphery of the sintered body. . Then, the upper and lower punches 12 and 13 are separated from each other, and the molding portions 12 a and 13 a of the punches 12 and 13 are peeled from both end surfaces of the sintered body 18.
- the dynamic pressure grooves 8b1 and 8c1 formed on the end face of the sintered body 18 have a relatively large amount of compression by the molding portions 12a and 13a of the upper and lower punches 12 and 13, and therefore, the amount of distortion compared to the hill portions 8b2 and 8c2. (Plastic deformation amount) is large. For this reason, when the compression force by the upper and lower punches 12 and 13 is released, the amount of spring back generated in the dynamic pressure grooves 8b1 and 8c1 is very small.
- the shapes of the groove bottom molding surfaces 12a1 and 13a1 of the molding portions 12a and 13a of the upper and lower punches 12 and 13 are transferred almost as they are to the groove bottom surfaces of the dynamic pressure grooves 8b1 and 8c1.
- the groove bottom molding surfaces 12a1 and 13a1 are inclined inward in the axial direction (sintered body 18 side) toward the outer diameter side, the groove bottom surfaces of the dynamic pressure grooves 8b1 and 8c1 are outside.
- the surface is inclined toward the axially central side of the sintered body 18 toward the radial side.
- the bottom surfaces of the dynamic pressure grooves 8b1 and 8c1 are axially directed toward the outer diameter side.
- the height of the hill portions 8b2 and 8c2 that is, the groove depth of the dynamic pressure grooves 8b1 and 8c1 can be secured to a predetermined value or more.
- the height of the hill portions 8b2 and 8c2 (particularly the height near the outer diameter end) varies somewhat for each product. At this time, if the height of the hill portions 8b2 and 8c2 is too high, this region may come into contact with the opposing members (flange portion 9 and hub 3) through the thrust bearing gap.
- the groove bottom surfaces of the dynamic pressure grooves 8b1 and 8c1 are inclined to ensure the groove depths of the dynamic pressure grooves 8b1 and 8c1 at a predetermined level or more, and the top surfaces of the hill portions 8b2 and 8c2 are secured. Since the vicinity of the outer diameter end can be retracted toward the center in the axial direction of the sintered body 18, contact between the hill portions 8b2 and 8c2 and the member facing the hill portions 8b2 and 8c2 can be reliably prevented.
- the present invention is not limited to the above embodiment.
- other embodiments of the present invention will be described, but the description of the same points as the above-described embodiments will be omitted.
- the case where the molded dynamic pressure grooves are provided on the end surfaces on both sides in the axial direction of the dynamic pressure bearing 8 is shown, but not limited to this, one axial direction of the dynamic pressure bearing 8 is provided.
- a molded dynamic pressure groove may be provided only on the end surface.
- the dynamic pressure groove 8 c 1 shown in FIG. 6 is formed on the lower end face 8 c of the dynamic pressure bearing 8, and the dynamic pressure is shown on the upper end face 8 b of the dynamic pressure bearing 8.
- a groove is not formed, and an annular groove 8b3 and a radial groove 8b4 are formed.
- a seal portion 7c protruding toward the inner diameter is provided.
- a wedge-shaped seal space S is formed between the tapered inner peripheral surface 7 c 1 of the seal portion 7 c and the outer peripheral surface 2 a of the shaft portion 2.
- the side part 7a and the bottom part 7b of the housing 7 are formed separately.
- a dynamic pressure groove is formed on the upper end surface 7 b 1 of the bottom 7 b of the housing 7.
- a thrust bearing gap of the first thrust bearing portion T1 is formed between the lower end surface 9b of the flange portion 9 and the upper end surface 7b1 of the bottom portion 7b of the housing 7.
- the case where the dynamic pressure grooves 8a1 and 8a2 are molded on the inner peripheral surface 8a of the dynamic pressure bearing 8 is shown.
- the inner peripheral surface 8a of the dynamic pressure bearing 8 may be a cylindrical surface.
- the bottom part 7b of the housing 7 of FIG. 14 as a dynamic pressure bearing which concerns on this invention.
- a dynamic pressure groove is formed on the upper end surface 7b1 of the bottom 7b, and the groove bottom surface of the dynamic pressure groove is inclined downward toward the outer diameter side.
- the lubricating fluid is oil.
- grease, magnetic fluid, air, or the like may be used as the lubricating fluid.
- the hydrodynamic bearing according to the present invention and the fluid hydrodynamic bearing device including the hydrodynamic bearing are not only a spindle motor for a disk drive device such as an HDD but also a fan motor for a cooling fan and a polygon scanner motor for a laser beam printer. It can also be incorporated and used.
Abstract
A dynamic pressure bearing 8 comprises dynamic pressure grooves 8b1 formed on an upper-side end surface 8b. The bottom groove surfaces of the dynamic pressure grooves 8b1 slope downward toward the outer diameter side.
Description
本発明は、動圧軸受、特に、端面に動圧溝が型成形された動圧軸受、およびその製造方法に関する。
The present invention relates to a dynamic pressure bearing, and more particularly to a dynamic pressure bearing in which a dynamic pressure groove is formed on an end surface, and a method for manufacturing the same.
動圧軸受は、相対回転する軸部材との間の軸受隙間に生じる流体圧力で、軸部材を非接触支持するものである。動圧軸受の内周面および端面には、軸受隙間に満たされた潤滑流体(例えば潤滑油)に動圧を発生させる動圧溝が形成されることがある。動圧溝は、周方向(軸部材の相対回転方向)と交差する方向に沿って延び、軸部材の相対回転に伴って周方向に流れる軸受隙間の潤滑流体の流れ方向が、動圧溝によって矯正されることにより、潤滑流体が集められて流体圧力が高められる。
A dynamic pressure bearing is a fluid pressure generated in a bearing gap between a relatively rotating shaft member and supports the shaft member in a non-contact manner. A dynamic pressure groove that generates a dynamic pressure in a lubricating fluid (for example, lubricating oil) filled in the bearing gap may be formed on the inner peripheral surface and the end surface of the dynamic pressure bearing. The dynamic pressure groove extends along a direction intersecting the circumferential direction (the relative rotation direction of the shaft member), and the flow direction of the lubricating fluid in the bearing gap flowing in the circumferential direction with the relative rotation of the shaft member is determined by the dynamic pressure groove. By correcting, the lubricating fluid is collected and the fluid pressure is increased.
動圧溝は、軸受素材に金型を押し付けることにより型成形されることが多い。例えば特許文献1には、円筒状の焼結体の内周面および端面に動圧溝を型成形する方法が示されている。
The dynamic pressure groove is often molded by pressing a mold against the bearing material. For example, Patent Document 1 discloses a method in which dynamic pressure grooves are molded on the inner peripheral surface and end surface of a cylindrical sintered body.
ところで、通常、動圧溝と、その周方向間に形成される丘部との周方向寸法比は一定とされる(例えば1:1)。動圧軸受の端面(スラスト軸受面)に形成される動圧溝の場合、動圧溝と丘部との周方向寸法比を一定にすると、外径側に行くにつれて動圧溝および丘部の周方向幅が広くなる(図4参照)。このような動圧溝を軸受素材の端面に型成形すると、成形型を押し付けたときに丘部に生じる歪み量(塑性変形量)が半径方向位置によって異なるため、図15に示すように、丘部101の高さが外径側に行くにつれて低くなる、いわゆる「ダレ」が生じやすい。この場合、動圧溝102の溝深さが外径側に行くにつれて浅くなるため、動圧溝102の外径端付近は、潤滑流体の流れ方向を矯正する能力(すなわち、潤滑流体を集める能力)が低くなり、動圧溝102による圧力向上効果が十分に発揮されないおそれがある。
By the way, normally, the circumferential dimension ratio between the dynamic pressure groove and the hill formed between the circumferential directions is constant (for example, 1: 1). In the case of the dynamic pressure groove formed on the end surface (thrust bearing surface) of the dynamic pressure bearing, if the circumferential dimension ratio between the dynamic pressure groove and the hill portion is constant, the dynamic pressure groove and The circumferential width is increased (see FIG. 4). When such a dynamic pressure groove is molded on the end face of the bearing material, the amount of strain (plastic deformation) generated in the hill when the mold is pressed differs depending on the radial position. So-called “sag” is likely to occur, where the height of the portion 101 decreases as it goes to the outer diameter side. In this case, since the groove depth of the dynamic pressure groove 102 becomes shallower toward the outer diameter side, the vicinity of the outer diameter end of the dynamic pressure groove 102 has the ability to correct the flow direction of the lubricating fluid (that is, the ability to collect the lubricating fluid). ) Is reduced, and the effect of improving the pressure by the dynamic pressure groove 102 may not be sufficiently exhibited.
そこで、本発明は、動圧軸受の端面に形成される動圧溝による圧力向上効果を高めることを目的とする。
Therefore, an object of the present invention is to enhance the pressure improvement effect by the dynamic pressure grooves formed on the end face of the dynamic pressure bearing.
前記課題を解決するために、本発明に係る動圧軸受は、軸方向一方側の端面に動圧溝が型成形され、前記動圧溝の溝底面が、外径側に向けて軸方向他方側に傾斜したことを特徴とする。
In order to solve the above-mentioned problem, the dynamic pressure bearing according to the present invention has a dynamic pressure groove formed on the end surface on one axial side, and the groove bottom surface of the dynamic pressure groove faces the outer diameter side in the other axial direction. Inclined to the side.
このように、本発明の動圧軸受では、軸方向一方側の端面に型成形された動圧溝の溝底面を、外径側に向けて軸方向他方側(溝深さを深くする側)に傾斜させた。これにより、丘部の頂面が外径側に向けて軸方向他方側に傾斜する、いわゆる「ダレ」が生じた場合でも、動圧溝の全域で所定以上の溝深さを確保することができる。この場合、動圧溝の全域において潤滑流体を集める能力が発揮されるため、軸受隙間の流体圧力を十分に高めることができる。
As described above, in the dynamic pressure bearing of the present invention, the groove bottom surface of the dynamic pressure groove molded on the end surface on one side in the axial direction is directed toward the outer diameter side on the other side in the axial direction (side where the groove depth is increased). Tilted. As a result, even when a so-called “sag” occurs in which the top surface of the hill portion is inclined toward the other side in the axial direction toward the outer diameter side, it is possible to ensure a groove depth of a predetermined value or more over the entire dynamic pressure groove. it can. In this case, the ability to collect the lubricating fluid over the entire region of the dynamic pressure groove is exhibited, so that the fluid pressure in the bearing gap can be sufficiently increased.
上記の動圧軸受は、例えば焼結体で形成することができる。焼結体に動圧溝を型成形した場合、例えば溶製材に動圧溝を型成形する場合と比べてスプリングバック量が大きくなるため、丘部に「ダレ」が生じやすい。従って、上記のように動圧溝の溝底面を傾斜させることが特に有効となる。
The above hydrodynamic bearing can be formed of, for example, a sintered body. When the dynamic pressure groove is molded in the sintered body, for example, the spring back amount is larger than that in the case where the dynamic pressure groove is molded in the molten material. Therefore, it is particularly effective to incline the bottom surface of the dynamic pressure groove as described above.
上記の動圧軸受が、軸方向他方側の端面に型成形された他の動圧溝をさらに有する場合、他の動圧溝の溝底面を、外径側に向けて軸方向一方側に傾斜させることが好ましい。これにより、他の動圧溝の全域において潤滑流体を集める能力が発揮されるため、動圧軸受の軸方向他方側の端面が面する他の軸受隙間の潤滑流体を十分に高めることができる。
When the above-described dynamic pressure bearing further has another dynamic pressure groove formed on the end surface on the other side in the axial direction, the groove bottom surface of the other dynamic pressure groove is inclined toward one side in the axial direction toward the outer diameter side. It is preferable to make it. As a result, the ability to collect the lubricating fluid in the entire area of the other dynamic pressure grooves is exhibited, so that the lubricating fluid in the other bearing gap facing the other axial end surface of the dynamic pressure bearing can be sufficiently increased.
上記の動圧軸受は、流体動圧軸受装置に組み込むことができる。具体的に、上記の動圧軸受と、前記動圧軸受の内周に挿入された軸部および前記軸部から外径側に突出したフランジ部を有し、前記動圧軸受に対して相対回転する軸部材と、前記動圧軸受の内周面と前記軸部の外周面との間のラジアル軸受隙間に生じる流体圧力で前記軸部材をラジアル方向に相対支持するラジアル軸受部と、前記動圧軸受の軸方向一方側の端面と前記フランジ部の端面との間のスラスト軸受隙間に生じる流体圧力で前記軸部材をスラスト方向に相対支持するスラスト軸受部とを備えた流体動圧軸受装置は、スラスト軸受隙間の流体圧力が高く、スラスト方向の軸受剛性が高い。
The above hydrodynamic bearing can be incorporated into a fluid dynamic bearing device. Specifically, the hydrodynamic bearing has a shaft portion inserted in an inner periphery of the hydrodynamic bearing, and a flange portion projecting to the outer diameter side from the shaft portion, and is relatively rotated with respect to the hydrodynamic bearing. A shaft member, a radial bearing portion that relatively supports the shaft member in a radial direction with a fluid pressure generated in a radial bearing gap between an inner peripheral surface of the dynamic pressure bearing and an outer peripheral surface of the shaft portion, and the dynamic pressure A fluid dynamic pressure bearing device including a thrust bearing portion that relatively supports the shaft member in a thrust direction with a fluid pressure generated in a thrust bearing gap between an end surface on one axial side of the bearing and an end surface of the flange portion, The fluid pressure in the thrust bearing gap is high, and the bearing rigidity in the thrust direction is high.
また、本発明に係る動圧軸受の製造方法は、軸受素材の端面に軸方向一方側から成形型を押しつけることにより、動圧溝を型成形するにあたり、前記成形型のうち、前記動圧溝の溝底面を成形する成形面が、外径側に向けて軸方向他方側に傾斜したことを特徴とする。この製造方法は、軸受素材の端面に軸方向一方側から押し付けて動圧溝を成形するための成形型であって、前記動圧溝の溝底面を成形する成形面が、外径側に向けて軸方向他方側に傾斜したことを特徴とする成形型を用いて行うことができる。
Further, in the method for manufacturing a hydrodynamic bearing according to the present invention, when the hydrodynamic groove is molded by pressing the mold from one side in the axial direction against the end surface of the bearing material, the hydrodynamic groove of the mold is A molding surface for molding the bottom surface of the groove is inclined toward the other side in the axial direction toward the outer diameter side. This manufacturing method is a forming die for forming a dynamic pressure groove by pressing against an end face of a bearing material from one side in the axial direction, and a forming surface for forming the groove bottom surface of the dynamic pressure groove is directed toward the outer diameter side. Thus, it can be performed by using a molding die characterized in that it is inclined to the other side in the axial direction.
このように、動圧溝の溝底面を成形する成形面を、外径側に向けて軸方向他方側に傾斜させることで、上記と同様に、丘部に「ダレ」が生じた場合でも、動圧溝の溝深さを確保することができる。
Thus, by inclining the molding surface for shaping the groove bottom surface of the dynamic pressure groove toward the outer diameter side toward the other side in the axial direction, as described above, even when `` sagging '' occurs in the hill part, The groove depth of the dynamic pressure groove can be ensured.
このとき、成形型のうち、動圧溝の周方向間に設けられた丘部を成形する凹部の深さを、外径側に行くにつれて深くすることが好ましい。具体的には、凹部の底面が、軸方向と直交する平坦面であることが好ましい。この凹部で成形された丘部は、外径側に行くにつれて高くなるため、その後の離型時にスプリングバックが生じた場合でも、外径端付近における動圧溝の溝深さ(すなわち丘部高さ)を確保することができる。
At this time, it is preferable that the depth of the concave portion for molding the hill portion provided between the circumferential directions of the dynamic pressure grooves in the molding die is made deeper toward the outer diameter side. Specifically, the bottom surface of the recess is preferably a flat surface orthogonal to the axial direction. Since the hill portion formed by this concave portion becomes higher as it goes to the outer diameter side, even if a springback occurs during subsequent release, the groove depth of the dynamic pressure groove near the outer diameter end (that is, the height of the hill portion). Can be secured.
以上のように、本発明によれば、動圧軸受の端面に型成形される動圧溝の溝深さが全域で確保されるため、動圧溝による圧力向上効果を高めることができる。
As described above, according to the present invention, since the groove depth of the dynamic pressure groove molded on the end face of the dynamic pressure bearing is ensured in the entire region, the effect of improving the pressure by the dynamic pressure groove can be enhanced.
以下、本発明の実施形態を図面に基づいて説明する。
Hereinafter, embodiments of the present invention will be described with reference to the drawings.
図1に、HDDのディスク駆動装置に用いられるスピンドルモータを示す。このスピンドルモータは、本発明の一実施形態に係る動圧軸受8を有する流体動圧軸受装置1と、流体動圧軸受装置1が取り付けられたブラケット6と、半径方向のギャップを介して対向させたステータコイル4およびロータマグネット5とを備えている。ステータコイル4はブラケット6に取り付けられ、ロータマグネット5は流体動圧軸受装置1のハブ3に取り付けられる。ハブ3には、所定枚数のディスク(図示省略)が搭載される。ステータコイル4に通電すると、ステータコイル4とロータマグネット5との間の電磁力でロータマグネット5が回転し、これによりハブ3およびディスクが一体となって回転する。
FIG. 1 shows a spindle motor used in an HDD disk drive device. This spindle motor is opposed to a fluid dynamic pressure bearing device 1 having a dynamic pressure bearing 8 according to an embodiment of the present invention and a bracket 6 to which the fluid dynamic pressure bearing device 1 is attached via a radial gap. The stator coil 4 and the rotor magnet 5 are provided. The stator coil 4 is attached to the bracket 6, and the rotor magnet 5 is attached to the hub 3 of the fluid dynamic bearing device 1. A predetermined number of disks (not shown) are mounted on the hub 3. When the stator coil 4 is energized, the rotor magnet 5 is rotated by the electromagnetic force between the stator coil 4 and the rotor magnet 5, whereby the hub 3 and the disk are rotated together.
流体動圧軸受装置1は、図2に示すように、動圧軸受8と、内周に動圧軸受8を保持する有底筒状のハウジング7と、動圧軸受8で回転自在に支持される軸部材とを備える。本実施形態では、軸部材が、動圧軸受8の内周に挿入された軸部2と、軸部2の一端に設けられたフランジ部9と、軸部2の他端に設けられた他のフランジ部としてのハブ3とで構成される。尚、以下では、説明の便宜上、軸方向でハウジング7の開口側を上側、閉塞側を下側とする。
As shown in FIG. 2, the fluid dynamic pressure bearing device 1 is rotatably supported by a dynamic pressure bearing 8, a bottomed cylindrical housing 7 that holds the dynamic pressure bearing 8 on the inner periphery, and the dynamic pressure bearing 8. A shaft member. In the present embodiment, the shaft member includes a shaft portion 2 inserted in the inner periphery of the dynamic pressure bearing 8, a flange portion 9 provided at one end of the shaft portion 2, and the other provided at the other end of the shaft portion 2. And a hub 3 as a flange portion. In the following, for convenience of explanation, the opening side of the housing 7 in the axial direction is the upper side and the closing side is the lower side.
軸部2は、例えば金属で形成され、凹凸の無いストレートな円筒面状の外周面2aを有する。フランジ部9は、例えば金属で形成され、軸部2の下端から外径側に突出している。フランジ部9の軸方向両側の端面9a、9bは、何れも凹凸の無い平坦面である。
The shaft portion 2 is made of, for example, metal and has a straight cylindrical outer peripheral surface 2a having no irregularities. The flange portion 9 is made of metal, for example, and protrudes from the lower end of the shaft portion 2 to the outer diameter side. The end surfaces 9a and 9b on both sides in the axial direction of the flange portion 9 are flat surfaces without any unevenness.
ハブ3は、例えば金属で形成され、軸部2の上端から外径側に突出した円盤部3aと、円盤部3aの外径端から軸方向下方に延びた円筒部3bと、円筒部3bの下端部からさらに外径に延びた鍔部3cと、円盤部3aの半径方向略中央部から下方に延びた円筒状の環状突出部3dとで構成される。鍔部3cの上側端面に、図示しないディスクが搭載される。尚、図示例ではハブ3が一体に形成されているが、ハブ3を複数の部材で構成してもよく、例えば、環状突出部3dを別部材で形成してもよい。
The hub 3 is made of, for example, metal, and includes a disc portion 3a that protrudes from the upper end of the shaft portion 2 to the outer diameter side, a cylindrical portion 3b that extends downward in the axial direction from the outer diameter end of the disc portion 3a, and a cylindrical portion 3b. The flange portion 3c further extends from the lower end portion to the outer diameter, and the cylindrical annular projecting portion 3d extends downward from the substantially central portion in the radial direction of the disk portion 3a. A disc (not shown) is mounted on the upper end surface of the flange 3c. In the illustrated example, the hub 3 is integrally formed. However, the hub 3 may be formed of a plurality of members, for example, the annular protrusion 3d may be formed of another member.
動圧軸受8は、金属や樹脂で円筒状に形成される。本実施形態では、動圧軸受8が焼結金属、例えば銅を比較的多く(例えば20質量%以上)含む焼結金属、具体的には銅を主成分とする銅系焼結金属、あるいは銅及び鉄を主成分とする銅鉄系焼結金属で形成される。
The dynamic pressure bearing 8 is formed in a cylindrical shape with metal or resin. In the present embodiment, the hydrodynamic bearing 8 is a sintered metal, for example, a sintered metal containing a relatively large amount of copper (for example, 20% by mass or more), specifically, a copper-based sintered metal mainly composed of copper, or copper. And a copper-iron-based sintered metal containing iron as a main component.
動圧軸受8の内周面8aには、動圧溝が形成される。本実施形態では、図3に示すように、動圧軸受8の内周面8aの軸方向に離隔した2つの領域に、ヘリングボーン形状の動圧溝8a1,8a2がそれぞれ形成される(クロスハッチングは丘部)。図示例では、上側の動圧溝8a1が軸方向非対称に形成されており、具体的には、軸方向略中央の環状の丘部より上側の領域の軸方向寸法が、環状の丘部より下側の領域の軸方向寸法よりも大きくなっている。下側の動圧溝8a2は軸方向対称に形成されている。
A dynamic pressure groove is formed on the inner peripheral surface 8 a of the dynamic pressure bearing 8. In this embodiment, as shown in FIG. 3, herringbone-shaped dynamic pressure grooves 8a1 and 8a2 are formed in two regions separated in the axial direction of the inner peripheral surface 8a of the dynamic pressure bearing 8 (cross hatching). Haoka). In the illustrated example, the upper dynamic pressure groove 8a1 is formed asymmetrically in the axial direction. Specifically, the axial dimension of the region above the annular hill at the approximate center in the axial direction is lower than the annular hill. It is larger than the axial dimension of the side region. The lower dynamic pressure groove 8a2 is formed symmetrically in the axial direction.
図4に示すように、動圧軸受8の上側端面8bには動圧溝8b1が形成される。具体的には、動圧軸受8の上側端面8bに、動圧溝8b1と丘部8b2(クロスハッチングで示す)とが周方向で交互に設けられる。動圧溝8b1は、周方向に対して交差する方向に延び、例えばスパイラル形状を成している。動圧溝8b1は、軸部材の回転に伴って潤滑油を内径側に押し込むポンプインタイプである。図示例では、動圧溝8b1が、軸部材の回転時の流体流れ方向(図中矢印方向)の下流側に向けて内径側に傾斜したポンプインタイプのスパイラル形状を成している。動圧溝8b1および丘部8b2は、何れも動圧軸受8の上側端面8bの内径端および外径端(詳しくは、上側端面8bと、内周面8aおよび外周面8dとの境界に設けられた面取り部)に達している。動圧溝8b1と丘部8b2とは、半径方向全域において周方向寸法比が一定とされ、図示例では1:1とされる。このため、動圧溝8b1および丘部8b2は、それぞれ外径側に行くにつれて徐々に周方向幅が広がっている。
As shown in FIG. 4, a dynamic pressure groove 8 b 1 is formed on the upper end surface 8 b of the dynamic pressure bearing 8. Specifically, dynamic pressure grooves 8b1 and hill portions 8b2 (indicated by cross-hatching) are alternately provided in the circumferential direction on the upper end surface 8b of the dynamic pressure bearing 8. The dynamic pressure groove 8b1 extends in a direction intersecting the circumferential direction and has, for example, a spiral shape. The dynamic pressure groove 8b1 is a pump-in type that pushes lubricating oil into the inner diameter side as the shaft member rotates. In the illustrated example, the dynamic pressure groove 8b1 has a pump-in type spiral shape inclined toward the inner diameter side toward the downstream side in the fluid flow direction (arrow direction in the figure) when the shaft member rotates. The dynamic pressure groove 8b1 and the hill portion 8b2 are both provided at the inner diameter end and outer diameter end of the upper end surface 8b of the dynamic pressure bearing 8 (specifically, at the boundary between the upper end surface 8b, the inner peripheral surface 8a, and the outer peripheral surface 8d). Chamfered part). The dynamic pressure groove 8b1 and the hill portion 8b2 have a constant dimensional ratio in the circumferential direction in the entire radial direction, and is 1: 1 in the illustrated example. For this reason, the circumferential width of the dynamic pressure groove 8b1 and the hill portion 8b2 gradually increases toward the outer diameter side.
図5に示すように、丘部8b2の上面は、外径側(図中右側)に向けて下方に傾斜している。また、動圧溝8b1の溝底面は、外径側に向けて下方に傾斜している。その結果、動圧溝8b1の溝深さt(丘部8b2の上面と動圧溝8b1の溝底面との軸方向距離)は、全域で所定値以上とされ、例えば10μm以上とされる。尚、図5では、動圧溝8b1および丘部8b2の傾斜角度を誇張して示しており、実際には、動圧溝8b1の内径端と外径端との軸方向距離dは、1~5μm程度である。
As shown in FIG. 5, the upper surface of the hill part 8b2 is inclined downward toward the outer diameter side (right side in the figure). Further, the bottom surface of the dynamic pressure groove 8b1 is inclined downward toward the outer diameter side. As a result, the groove depth t (the axial distance between the upper surface of the hill portion 8b2 and the groove bottom surface of the dynamic pressure groove 8b1) of the dynamic pressure groove 8b1 is set to a predetermined value or more, for example, 10 μm or more. In FIG. 5, the inclination angles of the dynamic pressure groove 8b1 and the hill portion 8b2 are exaggerated. Actually, the axial distance d between the inner diameter end and the outer diameter end of the dynamic pressure groove 8b1 is 1 to It is about 5 μm.
動圧軸受8の上側端面8bは、動圧溝8b1および丘部8b2を含めて、全域が型成形された面である。また、動圧軸受8の上側端面8bには、焼結前の型成形(フォーミング)だけでなく、焼結後の型成形(サイジング)が施されている。一方、動圧軸受8の上側端面8bと、内周面8aおよび外周面8dとの境界に設けられた面取り部は、焼結前の型成形のみが施され、焼結後の型成形は施されていない。このため、動圧軸受8の上側端面8b(動圧溝8b1および丘部8b2)は、面取り部よりも表面開口率が小さくなっている。
The upper end surface 8b of the dynamic pressure bearing 8 is a surface in which the entire region including the dynamic pressure groove 8b1 and the hill portion 8b2 is molded. Further, the upper end surface 8b of the dynamic pressure bearing 8 is subjected not only to molding (forming) before sintering but also to molding (sizing) after sintering. On the other hand, the chamfered portion provided at the boundary between the upper end surface 8b of the dynamic pressure bearing 8 and the inner peripheral surface 8a and the outer peripheral surface 8d is subjected only to molding before sintering, and the molding after sintering is performed. It has not been. For this reason, the upper surface 8b (dynamic pressure groove 8b1 and hill portion 8b2) of the dynamic pressure bearing 8 has a smaller surface opening ratio than the chamfered portion.
動圧軸受8の下側端面8cには、図6に示すように、スラスト動圧発生部としての動圧溝8c1が形成される。下側端面8cの動圧溝8c1および丘部8c2の具体的な形状等は、上側端面8bの動圧溝8b1および丘部8b2と同様であるため、説明を省略する。
As shown in FIG. 6, a dynamic pressure groove 8 c 1 as a thrust dynamic pressure generating portion is formed on the lower end surface 8 c of the dynamic pressure bearing 8. The specific shapes and the like of the dynamic pressure groove 8c1 and the hill portion 8c2 on the lower end surface 8c are the same as those of the dynamic pressure groove 8b1 and the hill portion 8b2 on the upper end surface 8b, and thus the description thereof is omitted.
尚、動圧溝8b1、8c1の形状は上記に限られない。例えば、図7に示す例では、動圧軸受8の上側端面8bの丘部8b2が、スパイラル形状の動圧溝8b1の周方向間に設けられた傾斜丘部8b21と、傾斜丘部8b21の内径端を連結する環状のランド部8b22とを備える。このように、丘部8b2の内径端にランド部8b22を設けることで、流体圧力のさらなる向上が期待できる。
The shape of the dynamic pressure grooves 8b1 and 8c1 is not limited to the above. For example, in the example shown in FIG. 7, the hill portion 8b2 of the upper end surface 8b of the dynamic pressure bearing 8 includes an inclined hill portion 8b21 provided between the circumferential directions of the spiral dynamic pressure groove 8b1, and an inner diameter of the inclined hill portion 8b21. And an annular land portion 8b22 connecting the ends. Thus, further improvement of fluid pressure can be expected by providing the land portion 8b22 at the inner diameter end of the hill portion 8b2.
また、動圧溝8b1、8c1は、ポンプインタイプに限らず、軸部材の回転に伴って潤滑流体を外径側に押し出すポンプアウトタイプであってもよい。また、動圧溝8b1、8c1は、スパイラル形状に限らず、ヘリングボーン形状や、ステップ形状(放射状)であってもよい。
The dynamic pressure grooves 8b1 and 8c1 are not limited to the pump-in type, and may be a pump-out type that pushes the lubricating fluid to the outer diameter side as the shaft member rotates. Further, the dynamic pressure grooves 8b1 and 8c1 are not limited to the spiral shape, but may be a herringbone shape or a step shape (radial shape).
動圧軸受8の外周面には、軸方向溝8d1が形成される。軸方向溝8d1の本数は任意であり、図示例では3本の軸方向溝8d1が円周方向等間隔に配される(図4および図6参照)。
An axial groove 8 d 1 is formed on the outer peripheral surface of the dynamic pressure bearing 8. The number of the axial grooves 8d1 is arbitrary, and in the illustrated example, three axial grooves 8d1 are arranged at equal intervals in the circumferential direction (see FIGS. 4 and 6).
ハウジング7は、図2に示すように、側部7a及び底部7bを一体に有する有底円筒状に形成される。側部7aの内周面7a1は、ストレートな円筒面状に形成され、動圧軸受8の外周面8dが隙間接着、圧入、接着剤介在下の圧入等により固定される。側部7aの外周面の上端には、図2に示すように、上方に向かって漸次拡径するテーパ面7a3が形成される。このテーパ面7a3と、ハブ3の環状突出部3dの円筒面状内周面3d1との間には、上方に向けて半径方向寸法が漸次縮小した環状のシール空間Sが形成される。このシール空間Sの毛細管力により、ハウジング7の内部に充満された潤滑油の漏れ出しを防止する。
As shown in FIG. 2, the housing 7 is formed in a bottomed cylindrical shape integrally having a side portion 7a and a bottom portion 7b. The inner peripheral surface 7a1 of the side portion 7a is formed in a straight cylindrical surface shape, and the outer peripheral surface 8d of the dynamic pressure bearing 8 is fixed by gap bonding, press-fitting, press-fitting with an adhesive interposed therebetween, or the like. At the upper end of the outer peripheral surface of the side portion 7a, as shown in FIG. 2, a tapered surface 7a3 that gradually increases in diameter upward is formed. Between this taper surface 7a3 and the cylindrical inner peripheral surface 3d1 of the annular protrusion 3d of the hub 3, an annular seal space S whose radial dimension is gradually reduced upward is formed. The capillary force of the seal space S prevents the lubricating oil filled in the housing 7 from leaking out.
上記構成を組み立てた後、動圧軸受8の内部気孔を含めたハウジング7の内部の空間に潤滑油を充満させることにより、図2に示す流体動圧軸受装置1が完成する。流体動圧軸受装置1の想定使用温度の範囲内では、油面は常にシール空間Sの内部に保持される。
After the above structure is assembled, the fluid dynamic pressure bearing device 1 shown in FIG. 2 is completed by filling the space inside the housing 7 including the internal pores of the dynamic pressure bearing 8 with lubricating oil. The oil level is always held inside the seal space S within the range of the assumed operating temperature of the fluid dynamic bearing device 1.
軸部材が回転すると、動圧軸受8の内周面8aと軸部2の外周面2aとの間にラジアル軸受隙間が形成されると共に、動圧溝8a1,8a2により上記ラジアル軸受隙間に生じる油膜の圧力が高められる。この油膜の圧力(動圧作用)により、軸部2及びハブ3をラジアル方向に回転自在に非接触支持するラジアル軸受部R1,R2が構成される。
When the shaft member rotates, a radial bearing gap is formed between the inner peripheral surface 8a of the dynamic pressure bearing 8 and the outer peripheral surface 2a of the shaft portion 2, and an oil film generated in the radial bearing gap by the dynamic pressure grooves 8a1 and 8a2. The pressure of is increased. Due to the pressure of the oil film (dynamic pressure action), radial bearing portions R1 and R2 are configured to support the shaft portion 2 and the hub 3 in a non-contact manner so as to be rotatable in the radial direction.
これと同時に、ハブ3の円盤部3aの下側端面3a1と動圧軸受8の上側端面8bとの間、及び、フランジ部9の上側端面9aと動圧軸受8の下側端面8cとの間にそれぞれスラスト軸受隙間が形成されると共に、動圧軸受8の両端面の動圧溝8b1,8c1により各スラスト軸受隙間に生じる油膜の圧力が高められる。これらの油膜の圧力(動圧作用)により、軸部2及びハブ3を両スラスト方向に回転自在に非接触支持する第1および第2のスラスト軸受部T1、T2が構成される。
At the same time, between the lower end surface 3a1 of the disk portion 3a of the hub 3 and the upper end surface 8b of the dynamic pressure bearing 8, and between the upper end surface 9a of the flange portion 9 and the lower end surface 8c of the dynamic pressure bearing 8. The thrust bearing gaps are formed respectively, and the pressure of the oil film generated in each thrust bearing gap is increased by the dynamic pressure grooves 8b1 and 8c1 on both end faces of the dynamic pressure bearing 8. The pressure (dynamic pressure action) of these oil films constitutes first and second thrust bearing portions T1 and T2 that support the shaft portion 2 and the hub 3 in a non-contact manner so as to be rotatable in both thrust directions.
このとき、動圧軸受8の外周面8dに形成された軸方向溝8d1により、潤滑油が流通可能な連通路が形成される。この連通路により、ハウジング7の内部に満たされた潤滑油に局部的な負圧が発生する事態を防止できる。特に本実施形態では、図3に示すように、動圧軸受8の内周面8aに形成された上側の動圧溝8a1が軸方向非対称な形状に形成されているため、軸部2の回転に伴ってラジアル軸受隙間の潤滑油が下方に押し込まれ、上記の連通路を介して潤滑油が循環し、これにより局部的な負圧の発生を確実に防止できる。
At this time, the axial groove 8d1 formed in the outer peripheral surface 8d of the hydrodynamic bearing 8 forms a communication path through which lubricating oil can flow. This communication path can prevent a local negative pressure from being generated in the lubricating oil filled in the housing 7. In particular, in the present embodiment, as shown in FIG. 3, the upper dynamic pressure groove 8a1 formed on the inner peripheral surface 8a of the dynamic pressure bearing 8 is formed in an axially asymmetric shape, so that the rotation of the shaft portion 2 is performed. Along with this, the lubricating oil in the radial bearing gap is pushed downward, and the lubricating oil circulates through the communication path, thereby reliably preventing the generation of local negative pressure.
次に、動圧軸受8の製造方法を説明する。動圧軸受8は、混合工程、圧縮成形(フォーミング)工程、焼結工程、寸法矯正(サイジング)工程、および動圧溝形成(溝サイジング)工程を経て行われる。
Next, a method for manufacturing the hydrodynamic bearing 8 will be described. The hydrodynamic bearing 8 is performed through a mixing process, a compression molding (forming) process, a sintering process, a dimension correction (sizing) process, and a dynamic pressure groove forming (groove sizing) process.
混合工程では、各種金属粉末を混合して、動圧軸受8の原料粉を作成する。原料粉を構成する金属粉末としては、例えば、鉄粉、銅粉、錫粉等を使用することができ、本実施形態では鉄粉および銅粉が使用される。この他、原料粉に黒鉛等の固体潤滑剤や、金属セッケン等の成形用潤滑剤を配合してもよい。
In the soot mixing process, various metal powders are mixed to prepare raw material powder for the hydrodynamic bearing 8. As metal powder which comprises raw material powder, iron powder, copper powder, tin powder, etc. can be used, for example, and iron powder and copper powder are used in this embodiment. In addition, a solid lubricant such as graphite or a molding lubricant such as metal soap may be blended in the raw material powder.
圧縮成形工程では、上記の原料粉をフォーミング金型に供給した後、圧縮することにより、円筒状の圧粉体を成形する。
In the compression molding step, after the above raw material powder is supplied to the forming mold, it is compressed to form a cylindrical green compact.
焼結工程では、圧粉体を所定の焼結温度で焼結することで、焼結体を得る。焼結温度は、銅の融点(1085℃)未満に設定され、例えば850~900℃とされる。
In the sintering step, the green compact is sintered at a predetermined sintering temperature to obtain a sintered body. The sintering temperature is set to less than the melting point of copper (1085 ° C.), for example, 850 to 900 ° C.
寸法矯正工程では、焼結体をサイジング金型で再圧縮することにより、焼結体の寸法(内径寸法、外径寸法、軸方向寸法)を矯正する。尚、寸法矯正工程では、焼結体の両端面と、外周面および内周面との間に設けられる面取り部は成形されない(サイジング金型と接触しない)。
In the dimension correction process, the sintered body is re-compressed with a sizing mold to correct the dimensions of the sintered body (inner diameter, outer diameter, and axial dimension). In the dimension correction process, the chamfered portions provided between the both end faces of the sintered body and the outer peripheral face and the inner peripheral face are not molded (not in contact with the sizing mold).
動圧溝形成工程では、溝サイジング金型により、焼結体の内周面に、図3に示す動圧溝8a1、8a2を型成形すると共に、焼結体の両端面に、それぞれ図4および図6に示す動圧溝8b1、8c1を型成形する。尚、動圧溝形成工程では、上記の寸法矯正工程と同様に、焼結体の面取り部は成形されない(溝サイジング金型と接触しない)。
In the dynamic pressure groove forming step, the dynamic pressure grooves 8a1 and 8a2 shown in FIG. 3 are molded on the inner peripheral surface of the sintered body by a groove sizing die, and the both ends of the sintered body are formed as shown in FIG. The dynamic pressure grooves 8b1 and 8c1 shown in FIG. 6 are molded. In the dynamic pressure groove forming step, the chamfered portion of the sintered body is not formed (not in contact with the groove sizing mold), as in the dimension correcting step.
以下、動圧溝形成工程を詳しく説明する。溝サイジング金型は、図8に示すように、焼結体18の各面を成形する成形型として、コアロッド11、上パンチ12、下パンチ13、およびダイ14を備える。
Hereinafter, the dynamic pressure groove forming process will be described in detail. As shown in FIG. 8, the groove sizing mold includes a core rod 11, an upper punch 12, a lower punch 13, and a die 14 as molds for molding each surface of the sintered body 18.
コアロッド11の外周面には、動圧溝8a1、8a2に対応する形状の成形部11a、11bが設けられる。
Formed portions 11a and 11b having shapes corresponding to the dynamic pressure grooves 8a1 and 8a2 are provided on the outer peripheral surface of the core rod 11.
上パンチ12の成形面(下面)には、動圧溝8b1に対応する形状の成形部12aが設けられる。成形部12aは、図9に示すように、動圧溝8b1の溝底面を成形する溝底成形面12a1と、丘部8b2を成形する凹部12a2とを備える。溝底成形面12a1は、外径側に向けて下方に傾斜している。凹部12a2の底面(すなわち、丘部8b2の頂面を成形する成形面)は、軸方向と直交する面と略平行とされる。その結果、凹部12a2の深さ(溝底成形面12a1と凹部12a2の底面との軸方向距離)は、外径側に行くにつれて深くなっている。
The forming surface (lower surface) of the upper punch 12 is provided with a forming portion 12a having a shape corresponding to the dynamic pressure groove 8b1. As shown in FIG. 9, the molding portion 12a includes a groove bottom molding surface 12a1 for molding the groove bottom surface of the dynamic pressure groove 8b1, and a recess 12a2 for molding the hill portion 8b2. The groove bottom molding surface 12a1 is inclined downward toward the outer diameter side. The bottom surface of the recess 12a2 (that is, the molding surface that molds the top surface of the hill portion 8b2) is substantially parallel to the surface orthogonal to the axial direction. As a result, the depth of the recess 12a2 (the axial distance between the groove bottom molding surface 12a1 and the bottom surface of the recess 12a2) becomes deeper toward the outer diameter side.
下パンチ13の成形面(上面)には、動圧溝8c1に対応する形状の成形部13aが設けられる。成形部13aは、図9に示すように、動圧溝8c1の溝底面を成形する溝底成形面13a1と、丘部8c2を成形する凹部13a2とを備える。溝底成形面13a1は、外径側に向けて上方に傾斜している。凹部13a2の底面(すなわち、丘部8c2の頂面を成形する成形面)は、軸方向と直交する面と略平行とされる。その結果、凹部13a2の深さ(溝底成形面13a1と凹部13a2の底面との軸方向距離)は、外径側に行くにつれて深くなっている。尚、図8~13では、成形部11a、11b、12a、13aの深さを誇張して示している。また、図9、11、13では、溝底成形面12a1、13a1の傾斜角度を誇張して示している。
The molding surface (upper surface) of the lower punch 13 is provided with a molding portion 13a having a shape corresponding to the dynamic pressure groove 8c1. As shown in FIG. 9, the molding portion 13a includes a groove bottom molding surface 13a1 for molding the groove bottom surface of the dynamic pressure groove 8c1, and a recess 13a2 for molding the hill portion 8c2. The groove bottom molding surface 13a1 is inclined upward toward the outer diameter side. The bottom surface of the recess 13a2 (that is, the molding surface that molds the top surface of the hill portion 8c2) is substantially parallel to the surface orthogonal to the axial direction. As a result, the depth of the recess 13a2 (the axial distance between the groove bottom molding surface 13a1 and the bottom surface of the recess 13a2) becomes deeper toward the outer diameter side. In FIGS. 8 to 13, the depths of the molding portions 11a, 11b, 12a, and 13a are exaggerated. 9, 11, and 13, the inclination angles of the groove bottom molding surfaces 12a1 and 13a1 are exaggerated.
動圧溝形成工程では、まず、図8に示すように、下パンチ13で下方から支持された焼結体18の内周に、コアロッド11を挿入し、焼結体18の内周面の動圧溝形成予定領域にコアロッド11の成形部11a、11bを対向させる。この焼結体18とコアロッド11との軸方向の位置関係を維持した状態で、図10に示すように、上パンチ12で焼結体18をダイ14の内周に圧入することにより、焼結体18の内周面を、コアロッド11の成形部11a、11bに押し付ける。これにより、焼結体の内周面に成形部11a、11bの形状が転写され、動圧溝8a1、8a2が成形される。
In the dynamic pressure groove forming step, first, as shown in FIG. 8, the core rod 11 is inserted into the inner periphery of the sintered body 18 supported from below by the lower punch 13 to move the inner peripheral surface of the sintered body 18. The molding parts 11a and 11b of the core rod 11 are opposed to the pressure groove formation scheduled region. In a state where the axial positional relationship between the sintered body 18 and the core rod 11 is maintained, the sintered body 18 is pressed into the inner periphery of the die 14 with the upper punch 12 as shown in FIG. The inner peripheral surface of the body 18 is pressed against the molding parts 11 a and 11 b of the core rod 11. Thereby, the shape of the molding parts 11a and 11b is transferred to the inner peripheral surface of the sintered body, and the dynamic pressure grooves 8a1 and 8a2 are molded.
これと同時に、上パンチ12及び下パンチ13で焼結体18を軸方向両側から圧迫することにより、各パンチ12、13の成形部12a、13aを焼結体18の両端面に押し付ける。これにより、焼結体18の両端面に成形部12a、13aの形状が転写され、動圧溝8b1、8c1が成形される。詳しくは、図11に示すように、各パンチ12、13の成形部12a、13aの溝底成形面12a1、13a1で、焼結体18の端面が圧迫されて動圧溝8b1、8c1が成形されると共に、焼結体18の端面付近の肉が塑性流動し、各成形部12a、13aの凹部12a2、13a2に入り込んで、丘部8b2、8c2が成形される。このとき、凹部12a2、13a2の深さが、外径側に行くにつれて深くなっていることで、凹部12a2、13a2内に満たされた丘部8b2、8c2の高さが、外径側に行くにつれて高くなっている。
At the same time, the sintered body 18 is pressed from both sides in the axial direction by the upper punch 12 and the lower punch 13, thereby pressing the molded portions 12 a and 13 a of the punches 12 and 13 against both end surfaces of the sintered body 18. As a result, the shapes of the molding portions 12a and 13a are transferred to both end faces of the sintered body 18, and the dynamic pressure grooves 8b1 and 8c1 are molded. Specifically, as shown in FIG. 11, the end surfaces of the sintered body 18 are pressed by the groove bottom forming surfaces 12a1 and 13a1 of the forming portions 12a and 13a of the punches 12 and 13, and the dynamic pressure grooves 8b1 and 8c1 are formed. At the same time, the meat in the vicinity of the end face of the sintered body 18 plastically flows and enters the recesses 12a2 and 13a2 of the molding portions 12a and 13a to form the hill portions 8b2 and 8c2. At this time, since the depth of the recesses 12a2 and 13a2 increases toward the outer diameter side, the height of the hill portions 8b2 and 8c2 filled in the recesses 12a2 and 13a2 increases toward the outer diameter side. It is high.
その後、図12に示すように、ダイ14の内周から焼結体18を排出する。これにより、焼結体18を外径向きにスプリングバックさせ、焼結体18の内周面をコアロッド11の外周面の成形部11a、11bから剥離し、焼結体の内周からコアロッドを引き抜く。そして、上下パンチ12、13を離反させ、各パンチ12、13の成形部12a、13aを焼結体18の両端面から剥離する。
Thereafter, as shown in FIG. 12, the sintered body 18 is discharged from the inner periphery of the die 14. Accordingly, the sintered body 18 is spring-backed toward the outer diameter, the inner peripheral surface of the sintered body 18 is peeled off from the molding portions 11a and 11b on the outer peripheral surface of the core rod 11, and the core rod is pulled out from the inner periphery of the sintered body. . Then, the upper and lower punches 12 and 13 are separated from each other, and the molding portions 12 a and 13 a of the punches 12 and 13 are peeled from both end surfaces of the sintered body 18.
このとき、各パンチ12、13による軸方向の圧迫力を解放すると、焼結体18に軸方向のスプリングバックが生じるため、図13に示すように、丘部8b2、8c2の高さがスプリングバック前の状態(点線参照)よりも低くなる。丘部8b2、8c2は、外径側に行くにつれて幅広になっているため、上下パンチ12、13の成形部12a、13aで成形したときの歪み量(塑性変形量)は、外径側に行くほど小さい。このため、丘部8b2、8c2のスプリングバック量(すなわち丘部8b2、8c2の高さの減少幅)は、外径側に行くほど大きくなる。
At this time, when the axial pressing force by the punches 12 and 13 is released, an axial spring back is generated in the sintered body 18, so that the height of the hill portions 8b2 and 8c2 is the spring back as shown in FIG. It becomes lower than the previous state (see dotted line). Since the hill portions 8b2 and 8c2 become wider toward the outer diameter side, the strain amount (plastic deformation amount) when formed by the forming portions 12a and 13a of the upper and lower punches 12 and 13 goes to the outer diameter side. Small enough. For this reason, the amount of springback of the hill portions 8b2 and 8c2 (that is, the reduction width of the height of the hill portions 8b2 and 8c2) increases toward the outer diameter side.
一方、焼結体18の端面に形成される動圧溝8b1、8c1は、上下パンチ12、13の成形部12a、13aによる圧縮量が比較的大きいため、丘部8b2、8c2と比べて歪み量(塑性変形量)が大きい。このため、上下パンチ12、13による圧迫力を解放したときに、動圧溝8b1、8c1に生じるスプリングバック量は非常に小さい。従って、動圧溝8b1、8c1の溝底面は、上下パンチ12、13の成形部12a、13aの溝底成形面12a1、13a1の形状がほぼそのまま転写される。本実施形態では、溝底成形面12a1、13a1が、それぞれ外径側に向けて軸方向内側(焼結体18側)に傾斜しているため、動圧溝8b1、8c1の溝底面が、外径側に向けて焼結体18の軸方向中央側に傾斜した面となる。
On the other hand, the dynamic pressure grooves 8b1 and 8c1 formed on the end face of the sintered body 18 have a relatively large amount of compression by the molding portions 12a and 13a of the upper and lower punches 12 and 13, and therefore, the amount of distortion compared to the hill portions 8b2 and 8c2. (Plastic deformation amount) is large. For this reason, when the compression force by the upper and lower punches 12 and 13 is released, the amount of spring back generated in the dynamic pressure grooves 8b1 and 8c1 is very small. Accordingly, the shapes of the groove bottom molding surfaces 12a1 and 13a1 of the molding portions 12a and 13a of the upper and lower punches 12 and 13 are transferred almost as they are to the groove bottom surfaces of the dynamic pressure grooves 8b1 and 8c1. In the present embodiment, since the groove bottom molding surfaces 12a1 and 13a1 are inclined inward in the axial direction (sintered body 18 side) toward the outer diameter side, the groove bottom surfaces of the dynamic pressure grooves 8b1 and 8c1 are outside. The surface is inclined toward the axially central side of the sintered body 18 toward the radial side.
以上のように、丘部8b2、8c2の頂面がスプリングバックにより外径側に向けて軸方向中央側に傾斜した場合でも、動圧溝8b1、8c1の溝底面を外径側に向けて軸方向中央側に傾斜させることにより、丘部8b2、8c2の高さ、すなわち、動圧溝8b1、8c1の溝深さを所定以上確保することができる。これにより、軸部材の回転時に、動圧溝8b1、8c1の外径端付近においても油を集める能力が十分に発揮され、スラスト軸受隙間の油膜圧力を高めて軸受剛性を向上させることができる。
As described above, even when the top surfaces of the hill portions 8b2 and 8c2 are inclined toward the outer diameter side toward the outer diameter side by the springback, the bottom surfaces of the dynamic pressure grooves 8b1 and 8c1 are axially directed toward the outer diameter side. By inclining toward the center in the direction, the height of the hill portions 8b2 and 8c2, that is, the groove depth of the dynamic pressure grooves 8b1 and 8c1 can be secured to a predetermined value or more. Thereby, when the shaft member rotates, the ability to collect oil is sufficiently exerted even near the outer diameter ends of the dynamic pressure grooves 8b1 and 8c1, and the oil film pressure in the thrust bearing gap can be increased to improve the bearing rigidity.
また、丘部8b2、8c2のスプリングバック量は、製品ごとに厳密に一定ではないため、丘部8b2、8c2の高さ(特に外径端付近における高さ)は製品ごとに多少バラつく。このとき、丘部8b2、8c2の高さが高すぎると、この領域が、スラスト軸受隙間を介して対向する部材(フランジ部9、ハブ3)と接触するおそれがある。本実施形態では、上記のように動圧溝8b1、8c1の溝底面を傾斜させることで、動圧溝8b1、8c1の溝深さを所定以上確保しながら、丘部8b2、8c2の頂面の外径端付近を焼結体18の軸方向中央側に後退させることができるため、丘部8b2、8c2とこれに対向する部材との接触を確実に防止することができる。
In addition, since the springback amounts of the hill portions 8b2 and 8c2 are not strictly constant for each product, the height of the hill portions 8b2 and 8c2 (particularly the height near the outer diameter end) varies somewhat for each product. At this time, if the height of the hill portions 8b2 and 8c2 is too high, this region may come into contact with the opposing members (flange portion 9 and hub 3) through the thrust bearing gap. In the present embodiment, as described above, the groove bottom surfaces of the dynamic pressure grooves 8b1 and 8c1 are inclined to ensure the groove depths of the dynamic pressure grooves 8b1 and 8c1 at a predetermined level or more, and the top surfaces of the hill portions 8b2 and 8c2 are secured. Since the vicinity of the outer diameter end can be retracted toward the center in the axial direction of the sintered body 18, contact between the hill portions 8b2 and 8c2 and the member facing the hill portions 8b2 and 8c2 can be reliably prevented.
その後、溝サイジング金型から焼結体18を取り出すことにより、動圧軸受8が完成する。
Thereafter, by removing the sintered body 18 from the groove sizing mold, the hydrodynamic bearing 8 is completed.
本発明は上記の実施形態に限られない。以下、本発明の他の実施形態を説明するが、上記の実施形態と同様の点については、説明を省略する。
The present invention is not limited to the above embodiment. Hereinafter, other embodiments of the present invention will be described, but the description of the same points as the above-described embodiments will be omitted.
例えば、上記の実施形態では、動圧軸受8の軸方向両側の端面に、型成形された動圧溝を設けた場合を示したが、これに限らず、動圧軸受8の軸方向一方の端面のみに、型成形された動圧溝を設けてもよい。例えば、図14に示す流体動圧軸受装置21では、動圧軸受8の下側端面8cに、図6に示す動圧溝8c1が形成され、動圧軸受8の上側端面8bには、動圧溝が形成されておらず、環状溝8b3や半径方向溝8b4が形成されている。ハウジング7の上端には、内径向きに突出したシール部7cが設けられる。シール部7cのテーパ状の内周面7c1と軸部2の外周面2aとの間に、楔状のシール空間Sが形成される。ハウジング7の側部7aと底部7bとは別体に形成される。ハウジング7の底部7bの上側端面7b1には、動圧溝が形成される。フランジ部9の下側端面9bとハウジング7の底部7bの上側端面7b1との間に、第1のスラスト軸受部T1のスラスト軸受隙間が形成される。
For example, in the above-described embodiment, the case where the molded dynamic pressure grooves are provided on the end surfaces on both sides in the axial direction of the dynamic pressure bearing 8 is shown, but not limited to this, one axial direction of the dynamic pressure bearing 8 is provided. A molded dynamic pressure groove may be provided only on the end surface. For example, in the fluid dynamic pressure bearing device 21 shown in FIG. 14, the dynamic pressure groove 8 c 1 shown in FIG. 6 is formed on the lower end face 8 c of the dynamic pressure bearing 8, and the dynamic pressure is shown on the upper end face 8 b of the dynamic pressure bearing 8. A groove is not formed, and an annular groove 8b3 and a radial groove 8b4 are formed. At the upper end of the housing 7, a seal portion 7c protruding toward the inner diameter is provided. A wedge-shaped seal space S is formed between the tapered inner peripheral surface 7 c 1 of the seal portion 7 c and the outer peripheral surface 2 a of the shaft portion 2. The side part 7a and the bottom part 7b of the housing 7 are formed separately. A dynamic pressure groove is formed on the upper end surface 7 b 1 of the bottom 7 b of the housing 7. A thrust bearing gap of the first thrust bearing portion T1 is formed between the lower end surface 9b of the flange portion 9 and the upper end surface 7b1 of the bottom portion 7b of the housing 7.
また、上記の実施形態では、動圧軸受8の内周面8aに動圧溝8a1、8a2が型成形された場合を示したが、動圧軸受8の内周面8aを円筒面としてもよい。あるいは、図14のハウジング7の底部7bを、本発明に係る動圧軸受としてもよい。この場合、底部7bの上側端面7b1に動圧溝が型成形され、この動圧溝の溝底面が、外径側に向けて下方に傾斜している。
In the above-described embodiment, the case where the dynamic pressure grooves 8a1 and 8a2 are molded on the inner peripheral surface 8a of the dynamic pressure bearing 8 is shown. However, the inner peripheral surface 8a of the dynamic pressure bearing 8 may be a cylindrical surface. . Or it is good also considering the bottom part 7b of the housing 7 of FIG. 14 as a dynamic pressure bearing which concerns on this invention. In this case, a dynamic pressure groove is formed on the upper end surface 7b1 of the bottom 7b, and the groove bottom surface of the dynamic pressure groove is inclined downward toward the outer diameter side.
また、上記の実施形態では、動圧軸受8が固定され、軸部2を有する軸部材が回転する場合を示したが、これとは逆に、軸部材を固定し、動圧軸受8側を回転させてもよい。
Further, in the above embodiment, the case where the dynamic pressure bearing 8 is fixed and the shaft member having the shaft portion 2 rotates is shown. On the contrary, the shaft member is fixed and the dynamic pressure bearing 8 side is fixed. It may be rotated.
また、上記の実施形態では、潤滑流体が油である場合を示したが、この他、グリースや磁性流体、空気等を潤滑流体として使用してもよい。
In the above embodiment, the lubricating fluid is oil. However, grease, magnetic fluid, air, or the like may be used as the lubricating fluid.
また、本発明に係る動圧軸受およびこれを備えた流体動圧軸受装置は、HDD等のディスク駆動装置用のスピンドルモータのみならず、冷却ファン用のファンモータやレーザビームプリンタ用のポリゴンスキャナモータなどに組み込んで使用することもできる。
The hydrodynamic bearing according to the present invention and the fluid hydrodynamic bearing device including the hydrodynamic bearing are not only a spindle motor for a disk drive device such as an HDD but also a fan motor for a cooling fan and a polygon scanner motor for a laser beam printer. It can also be incorporated and used.
1 流体動圧軸受装置
2 軸部
3 ハブ
7 ハウジング
8 動圧軸受
8a1、8a2 (ラジアル)動圧溝
8b1、8c1 (スラスト)動圧溝
8b2、8c2 丘部
9 フランジ部
11 コアロッド
12、13 パンチ
12a、13a 成形部
12a1、13a1 溝底成形面
12a2、13a2 凹部
14 ダイ
18 焼結体
R1,R2 ラジアル軸受部
T1,T2 スラスト軸受部
S シール空間 DESCRIPTION OFSYMBOLS 1 Fluid dynamic pressure bearing apparatus 2 Shaft part 3 Hub 7 Housing 8 Dynamic pressure bearing 8a1, 8a2 (Radial) Dynamic pressure groove 8b1, 8c1 (Thrust) Dynamic pressure groove 8b2, 8c2 Hill part 9 Flange part 11 Core rod 12, 13 Punch 12a , 13a Molding parts 12a1, 13a1 Groove bottom molding surfaces 12a2, 13a2 Recess 14 Die 18 Sintered body R1, R2 Radial bearing part T1, T2 Thrust bearing part S Seal space
2 軸部
3 ハブ
7 ハウジング
8 動圧軸受
8a1、8a2 (ラジアル)動圧溝
8b1、8c1 (スラスト)動圧溝
8b2、8c2 丘部
9 フランジ部
11 コアロッド
12、13 パンチ
12a、13a 成形部
12a1、13a1 溝底成形面
12a2、13a2 凹部
14 ダイ
18 焼結体
R1,R2 ラジアル軸受部
T1,T2 スラスト軸受部
S シール空間 DESCRIPTION OF
Claims (11)
- 軸方向一方側の端面に動圧溝が型成形された動圧軸受において、
前記動圧溝の溝底面が、外径側に向けて軸方向他方側に傾斜したことを特徴とする動圧軸受。 In a dynamic pressure bearing in which a dynamic pressure groove is molded on the end surface on one axial side,
A dynamic pressure bearing, wherein a bottom surface of the dynamic pressure groove is inclined toward the other side in the axial direction toward the outer diameter side. - 焼結体からなる請求項1に記載の動圧軸受。 The hydrodynamic bearing according to claim 1, comprising a sintered body.
- 軸方向他方側の端面に他の動圧溝が型成形され、
前記他の動圧溝の溝底面が、外径側に向けて軸方向一方側に傾斜した請求項1又は2に記載の動圧軸受。 Another dynamic pressure groove is molded on the other end face in the axial direction,
The dynamic pressure bearing according to claim 1 or 2, wherein a groove bottom surface of the other dynamic pressure groove is inclined to one side in the axial direction toward the outer diameter side. - 請求項1~3の何れか1項に記載の動圧軸受と、前記動圧軸受の内周に挿入された軸部および前記軸部から外径側に突出したフランジ部を有し、前記動圧軸受に対して相対回転する軸部材と、前記動圧軸受の内周面と前記軸部の外周面との間のラジアル軸受隙間に生じる流体圧力で前記軸部材をラジアル方向に相対支持するラジアル軸受部と、前記動圧軸受の軸方向一方側の端面と前記フランジ部の端面との間のスラスト軸受隙間に生じる流体圧力で前記軸部材をスラスト方向に相対支持するスラスト軸受部とを備えた流体動圧軸受装置。 A hydrodynamic bearing according to any one of claims 1 to 3, a shaft portion inserted into an inner periphery of the hydrodynamic bearing, and a flange portion projecting outward from the shaft portion, A shaft member that rotates relative to the pressure bearing, and a radial member that supports the shaft member in a radial direction relative to a radial pressure generated in a radial bearing gap between the inner peripheral surface of the dynamic pressure bearing and the outer peripheral surface of the shaft portion. A bearing portion; and a thrust bearing portion that relatively supports the shaft member in the thrust direction with a fluid pressure generated in a thrust bearing gap between an end surface on one axial side of the hydrodynamic bearing and an end surface of the flange portion. Fluid dynamic bearing device.
- 請求項4に記載の流体動圧軸受を有するモータ。 A motor having the fluid dynamic pressure bearing according to claim 4.
- 軸受素材の端面に軸方向一方側から成形型を押しつけることにより、動圧溝を型成形するにあたり、
前記成形型のうち、前記動圧溝の溝底面を成形する成形面が、外径側に向けて軸方向他方側に傾斜したことを特徴とする動圧軸受の製造方法。 When molding the dynamic pressure groove by pressing the mold from one side in the axial direction against the end face of the bearing material,
A method of manufacturing a hydrodynamic bearing, wherein a molding surface for molding the bottom surface of the dynamic pressure groove in the molding die is inclined toward the other side in the axial direction toward the outer diameter side. - 前記成形型のうち、前記動圧溝の周方向間に設けられた丘部を成形する凹部の深さが、外径側に行くにつれて深くなっている請求項6に記載の動圧軸受の製造方法。 The hydrodynamic bearing according to claim 6, wherein a depth of a concave portion for molding a hill portion provided between circumferential directions of the dynamic pressure groove in the molding die becomes deeper toward an outer diameter side. Method.
- 前記凹部の底面が、軸方向と直交する平坦面である請求項7に記載の動圧軸受の製造方法。 The method for manufacturing a hydrodynamic bearing according to claim 7, wherein the bottom surface of the recess is a flat surface orthogonal to the axial direction.
- 軸受素材の端面に軸方向一方側から押し付けて動圧溝を成形するための成形型において、
前記動圧溝の溝底面を成形する成形面が、外径側に向けて軸方向他方側に傾斜したことを特徴とする成形型。 In the molding die for molding the dynamic pressure groove by pressing against the end face of the bearing material from one side in the axial direction,
A molding die, wherein a molding surface for molding the bottom surface of the dynamic pressure groove is inclined toward the other side in the axial direction toward the outer diameter side. - 前記動圧溝の周方向間に設けられた丘部を成形する凹部の深さが、外径側に行くにつれて深くなっている請求項9に記載の成形型。 The molding die according to claim 9, wherein the depth of the concave portion for molding the hill portion provided between the circumferential directions of the dynamic pressure grooves becomes deeper toward the outer diameter side.
- 前記凹部の底面が、軸方向と直交する平坦面である請求項10に記載の成形型。 The mold according to claim 10, wherein the bottom surface of the recess is a flat surface orthogonal to the axial direction.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016-165840 | 2016-08-26 | ||
| JP2016165840A JP6858508B2 (en) | 2016-08-26 | 2016-08-26 | Dynamic pressure bearings and their manufacturing methods |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018037822A1 true WO2018037822A1 (en) | 2018-03-01 |
Family
ID=61244865
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/027187 WO2018037822A1 (en) | 2016-08-26 | 2017-07-27 | Dynamic pressure bearing and method for manufacturing same |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP6858508B2 (en) |
| CN (2) | CN207526872U (en) |
| WO (1) | WO2018037822A1 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI785213B (en) * | 2018-03-08 | 2022-12-01 | 日商Ntn股份有限公司 | Dynamic pressure bearing and manufacturing method thereof |
| WO2023189389A1 (en) * | 2022-03-28 | 2023-10-05 | Ntn株式会社 | Oil-impregnated sintered bearing and fluid dynamic bearing device including same |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6858508B2 (en) * | 2016-08-26 | 2021-04-14 | Ntn株式会社 | Dynamic pressure bearings and their manufacturing methods |
| JP2020165471A (en) * | 2019-03-29 | 2020-10-08 | 日本電産株式会社 | Gas dynamic pressure bearing, motor and blower |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1182487A (en) * | 1997-09-11 | 1999-03-26 | Hitachi Powdered Metals Co Ltd | Porous bearing |
| JP2008039064A (en) * | 2006-08-07 | 2008-02-21 | Nippon Densan Corp | Sleeve, sleeve unit, motor, and methods for manufacturing sleeve and sleeve unit |
| JP2013185658A (en) * | 2012-03-08 | 2013-09-19 | Samsung Electro-Mechanics Japan Advanced Technology Co Ltd | Rotary device and method of producing the same |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6018614A (en) * | 1984-05-31 | 1985-01-30 | Taiho Kogyo Co Ltd | Tapered land thrust bearing |
| JP5863422B2 (en) * | 2011-11-30 | 2016-02-16 | 三菱重工業株式会社 | Thrust bearing and rotating machine |
| JP6466105B2 (en) * | 2014-09-01 | 2019-02-06 | Ntn株式会社 | Fluid dynamic bearing device and bearing member and shaft member used therefor |
| JP6858508B2 (en) * | 2016-08-26 | 2021-04-14 | Ntn株式会社 | Dynamic pressure bearings and their manufacturing methods |
-
2016
- 2016-08-26 JP JP2016165840A patent/JP6858508B2/en active Active
-
2017
- 2017-07-27 WO PCT/JP2017/027187 patent/WO2018037822A1/en active Application Filing
- 2017-08-23 CN CN201721063800.3U patent/CN207526872U/en not_active Expired - Fee Related
- 2017-08-23 CN CN201710733075.4A patent/CN107781293B/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1182487A (en) * | 1997-09-11 | 1999-03-26 | Hitachi Powdered Metals Co Ltd | Porous bearing |
| JP2008039064A (en) * | 2006-08-07 | 2008-02-21 | Nippon Densan Corp | Sleeve, sleeve unit, motor, and methods for manufacturing sleeve and sleeve unit |
| JP2013185658A (en) * | 2012-03-08 | 2013-09-19 | Samsung Electro-Mechanics Japan Advanced Technology Co Ltd | Rotary device and method of producing the same |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI785213B (en) * | 2018-03-08 | 2022-12-01 | 日商Ntn股份有限公司 | Dynamic pressure bearing and manufacturing method thereof |
| WO2023189389A1 (en) * | 2022-03-28 | 2023-10-05 | Ntn株式会社 | Oil-impregnated sintered bearing and fluid dynamic bearing device including same |
Also Published As
| Publication number | Publication date |
|---|---|
| CN207526872U (en) | 2018-06-22 |
| CN107781293A (en) | 2018-03-09 |
| JP6858508B2 (en) | 2021-04-14 |
| JP2018031460A (en) | 2018-03-01 |
| CN107781293B (en) | 2021-09-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5384014B2 (en) | Sintered bearing | |
| WO2018037822A1 (en) | Dynamic pressure bearing and method for manufacturing same | |
| JP6199675B2 (en) | Sintered metal bearing and fluid dynamic pressure bearing device provided with the bearing | |
| CN1807908B (en) | Fluid lubrication bearing apparatus | |
| WO2011145426A1 (en) | Bearing member and fluid dynamic bearing device using same | |
| JP6812113B2 (en) | Sintered oil-impregnated bearing and its manufacturing method | |
| JP6461483B2 (en) | Sintered bearing, fluid dynamic pressure bearing device including the same, and method for manufacturing sintered bearing | |
| JP2006316896A (en) | Method for manufacturing oil-impregnated sintered bearing and oil-impregnated sintered bearing | |
| WO2017159345A1 (en) | Dynamic pressure bearing and method for manufacturing same | |
| JP6347929B2 (en) | Sintered metal bearing | |
| JP7076266B2 (en) | Manufacturing method of sintered oil-impregnated bearing | |
| WO2015137059A1 (en) | Sintered bearing, fluid dynamic bearing device and motor comprising same, and sintered bearing manufacturing method | |
| JP5762774B2 (en) | Fluid dynamic bearing device | |
| JP2008039104A (en) | Fluid bearing device | |
| JP2016180427A (en) | Bearing member of fluid dynamic pressure bearing device and manufacturing method thereof | |
| JP7094118B2 (en) | Sintered metal dynamic pressure bearing | |
| JP5606831B2 (en) | Bearing member and manufacturing method thereof | |
| JP4738831B2 (en) | Hydrodynamic bearing device | |
| JP2016180496A (en) | Bearing member and manufacturing method thereof | |
| JP2010091004A (en) | Hydrodynamic pressure bearing device and manufacturing method therefor | |
| JP5819078B2 (en) | Fluid dynamic bearing device | |
| WO2019065719A1 (en) | Fluid dynamic pressure bearing device and motor having same | |
| JP2013044395A (en) | Fluid dynamic-pressure bearing device | |
| JP2006105331A (en) | Bearing sleeve and its manufacturing method | |
| JP2007040482A (en) | Method of manufacturing fluid bearing device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17843308 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 17843308 Country of ref document: EP Kind code of ref document: A1 |