WO2017126368A1 - 撮影支援装置及び撮影支援方法 - Google Patents
撮影支援装置及び撮影支援方法 Download PDFInfo
- Publication number
- WO2017126368A1 WO2017126368A1 PCT/JP2017/000503 JP2017000503W WO2017126368A1 WO 2017126368 A1 WO2017126368 A1 WO 2017126368A1 JP 2017000503 W JP2017000503 W JP 2017000503W WO 2017126368 A1 WO2017126368 A1 WO 2017126368A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- imaging
- information
- pixel density
- shooting
- unit
- Prior art date
Links
Images















Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B15/00—Special procedures for taking photographs; Apparatus therefor
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/8851—Scan or image signal processing specially adapted therefor, e.g. for scan signal adjustment, for detecting different kinds of defects, for compensating for structures, markings, edges
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M5/00—Investigating the elasticity of structures, e.g. deflection of bridges or air-craft wings
- G01M5/0033—Investigating the elasticity of structures, e.g. deflection of bridges or air-craft wings by determining damage, crack or wear
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M5/00—Investigating the elasticity of structures, e.g. deflection of bridges or air-craft wings
- G01M5/0091—Investigating the elasticity of structures, e.g. deflection of bridges or air-craft wings by using electromagnetic excitation or detection
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/8806—Specially adapted optical and illumination features
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/95—Investigating the presence of flaws or contamination characterised by the material or shape of the object to be examined
- G01N21/9515—Objects of complex shape, e.g. examined with use of a surface follower device
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B17/00—Details of cameras or camera bodies; Accessories therefor
- G03B17/56—Accessories
- G03B17/561—Support related camera accessories
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/80—Analysis of captured images to determine intrinsic or extrinsic camera parameters, i.e. camera calibration
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/64—Computer-aided capture of images, e.g. transfer from script file into camera, check of taken image quality, advice or proposal for image composition or decision on when to take image
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/69—Control of means for changing angle of the field of view, e.g. optical zoom objectives or electronic zooming
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/695—Control of camera direction for changing a field of view, e.g. pan, tilt or based on tracking of objects
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C9/00—Measuring inclination, e.g. by clinometers, by levels
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30168—Image quality inspection
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30181—Earth observation
- G06T2207/30184—Infrastructure
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Signal Processing (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Theoretical Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Electromagnetism (AREA)
- Quality & Reliability (AREA)
- Studio Devices (AREA)
- Investigating Materials By The Use Of Optical Means Adapted For Particular Applications (AREA)
- Accessories Of Cameras (AREA)
- Image Processing (AREA)
Abstract
Description
図1は、第1の実施形態での撮影支援装置の構成例を示すブロック図である。
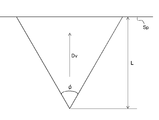
視野角φ=2×arctan(撮像素子サイズ[mm]/(2×焦点距離[mm]))
図2のように撮影対象面Spに直交する撮影方向Dvから撮影する場合、1画素当たりの分解能(画素密度の逆数である)は、撮影距離Lを用いて、次の数2により求めることができる。尚、数2において「tan」はtangent関数である。
分解能[mm/画素]=2×撮影距離L[mm]×tan(視野角φ/2)/撮像素子画素数
図3のように撮影対象面Spに対して非直交の方向Dsから撮影する場合、1画素当たりの分解能(画素密度の逆数である)は、撮影距離L及び撮影対象面Spの傾き角度θを用いて、次の数3により求めることができる。
分解能[mm/画素]=(2×撮影距離L[mm]×tan(視野角φ/2)/撮像素子画素数)/cosθ
数1~数3を用いて説明したように、実画素密度は、撮像素子画素数、撮像素子サイズ、焦点距離、撮影距離L、及び傾き角度θに基づいて算出することができる。
図5は、第2の実施形態での撮影支援装置の構成例を示すブロック図である。図5において、図1に示した第1の実施形態の撮影支援装置と同じ構成要素には同じ符号を付してあり、説明を省略する。
図8は、第3の実施形態での撮影支援装置の構成例を示すブロック図である。図8において、図5に示した第2の実施形態の撮影支援装置と同じ構成要素には同じ符号を付してあり、説明を省略する。
以下では、社会的なインフラストラクチャーとして建造された構造物を点検する際に使用される撮影支援装置の一例について説明する。
図10は、構造物の一例である橋梁の外観図であり、橋梁を下から見た斜視図である。
図11は、撮像装置200を含むロボット装置100の外観を示す斜視図であり、橋梁1の主桁2間に設置されている状態に関して示している。また、図12は、図11に示したロボット装置100の要部断面図である。
図15は、本発明に係る撮影支援装置を用いた撮影支援システムの一例を示すブロック図である。本例では、図15の撮影支援装置10を、図11~図14に示したロボット装置100を制御する端末装置として適用した場合を示す。
2 主桁
3 横桁
4 対傾構
5 横構
6 床版
10 撮影支援装置
12 無線通信部
14 記憶部
16 要求画素密度情報取得部
18 撮影性能情報取得部
20 距離情報取得部
22 傾き角度情報取得部
24 実画素密度算出部
26 画素密度判定部
28 要求適合範囲判定部
32 撮影制御演算部
34 撮影制御部
40 出力部
50 データベース
62 外部入出力部
63 表示部
64 音出力部
65 指示入力部
70 CPU
72 撮影箇所特定部
74 撮影計画部
76 実撮影情報取得部
78 撮影支援情報生成部
82 画質判定部
84 撮影範囲判定部
86 撮影完了判定部
88 撮影未完了判定部
90 画質制御部
100 ロボット装置
102 主フレーム
104 垂直伸延アーム
104A カメラ設置部
106 筐体
108 X方向駆動部
108A ボールネジ
108B ボールナット
108C モータ
110 Y方向駆動部
110A タイヤ
110B タイヤ
112 Z方向駆動部
120 パンチルト機構
130 ロボット制御部
200 撮像装置
202 二眼カメラ
202A 第1の撮像部
202B 第2の撮像部
204 撮影制御部
206 パンチルト駆動部
210 パンチルト制御部
230 ロボット側通信部
300 基準装置
Ag 要求適合範囲
Ap 撮影可能範囲
Dv 撮影方向
L 撮影距離
P パン軸
Sp 撮影対象面
T チルト軸
φ 視野角
θ 傾き角度
Claims (13)
- 撮像装置を用いる構造物の撮影を支援する撮影支援装置であって、
前記構造物の損傷状態の認識に要求される前記構造物の撮影対象面の要求画素密度情報を取得する要求画素密度情報取得部と、
前記撮像装置の撮像素子の画素数情報及びサイズ情報と、前記撮像装置の撮像レンズの焦点距離情報とを含む前記撮像装置の撮影性能情報を取得する撮影性能情報取得部と、
前記撮像装置から前記構造物の撮影対象面までの距離情報を取得する距離情報取得部と、
前記撮像装置の撮影方向と直交する方向に対する前記構造物の撮影対象面の傾き角度情報を取得する傾き角度情報取得部と、
取得された前記撮影性能情報、前記距離情報及び前記傾き角度情報に基づいて、前記構造物の撮影対象面の実画素密度を算出する実画素密度算出部と、
算出された前記実画素密度が前記要求画素密度情報に適合するか否かを判定する画素密度判定部と、
を備える撮影支援装置。 - 前記実画素密度算出部は、前記傾き角度情報が0度よりも大きな角度θである場合の前記実画素密度を、前記傾き角度情報が0度である場合の前記実画素密度に比べてcosθ倍にする、
請求項1に記載の撮影支援装置。 - 前記撮像装置の視野角に対応する前記構造物の撮影対象面の撮影可能範囲うち、前記実画素密度が前記要求画素密度情報に適合する要求適合範囲を判定する要求適合範囲判定部を備える、
請求項1又は2に記載の撮影支援装置。 - 前記要求画素密度情報取得部は、前記構造物の部材の種類、及び前記構造物の損傷の種類のうち少なくとも一つに基づいて、前記要求画素密度情報を取得する、
請求項1から3のうちいずれか一項に記載の撮影支援装置。 - 前記判定の結果を出力する出力部を備える、
請求項1から4のうちいずれか一項に記載の撮影支援装置。 - 前記出力部は、前記実画素密度が前記要求画素密度情報に不適合であると判定された場合、前記撮像装置の移動を促す情報を出力する、
請求項5に記載の撮影支援装置。 - 前記実画素密度が前記要求画素密度情報に不適合であると判定された場合、前記撮像装置の現在の撮影位置及び現在の撮影方向に基づいて、前記実画素密度が前記要求画素密度情報に適合する前記撮像装置の撮影位置及び撮影方向を演算する撮影制御演算部と、
前記撮影制御演算部の演算結果に基づいて、前記撮像装置の撮影位置及び撮影方向を制御する撮影制御部と、
を備える、
請求項1から6のうちいずれか一項に記載の撮影支援装置。 - 前記画素密度判定部は、前記構造物の複数回の撮影を行う前に、前記構造物の撮影ごとの前記構造物の撮影対象面での画素密度を前記実画素密度として前記複数回の撮影にわたり前記実画素密度が前記要求画素密度情報を満たすか否かを判定する、
請求項1から7のうちいずれか一項に記載の撮影支援装置。 - 前記画素密度判定部は、前記撮像装置の種類又は前記撮像装置を搭載した装置の種類に応じて、前記実画素密度と比較する前記要求画素密度情報を切替える、
請求項1から8のうちいずれか一項に記載の撮影支援装置。 - 前記構造物の図面情報を取得する図面情報取得部と、
取得された前記図面情報に基づいて、前記構造物の撮影箇所を特定する撮影箇所特定部と、
特定された前記構造物の撮影箇所に基づいて、前記構造物の撮影ごとの撮影位置及び撮影方向を判定し、前記構造物の撮影ごとの撮影位置及び撮影方向を示す撮影計画情報を生成する撮影計画部と、
を備える、
請求項9に記載の撮影支援装置。 - 前記構造物は、点検対象の部材としてコンクリート部材及び鋼部材のうち少なくとも一つを含む、
請求項1から10のうちいずれか一項に記載の撮影支援装置。 - 前記構造物は、認識対象の損傷としてひび割れ及び亀裂のうち少なくとも一つが生じる部材を含む、
請求項1から11のうちいずれか一項に記載の撮影支援装置。 - 撮像装置を用いる構造物の撮影を支援する撮影支援方法であって、
前記構造物の損傷状態の認識に要求される前記構造物の撮影対象面の要求画素密度情報を取得する工程と、
前記撮像装置の撮像素子の画素数情報及びサイズ情報と、前記撮像装置の撮像レンズの焦点距離情報とを含む前記撮像装置の撮影性能情報を取得する工程と、
前記撮像装置から前記構造物の撮影対象面までの距離情報を取得する工程と、
前記撮像装置の撮影方向と直交する方向に対する前記構造物の撮影対象面の傾き角度情報を取得する工程と、
取得された前記撮影性能情報、前記距離情報及び前記傾き角度情報に基づいて、前記構造物の撮影対象面の実画素密度を算出する工程と、
算出された前記実画素密度が前記要求画素密度情報に適合するか否かを判定する工程と、
を含む撮影支援方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201780006368.0A CN108476282B (zh) | 2016-01-22 | 2017-01-10 | 摄影辅助装置及摄影辅助方法 |
| JP2017562520A JP6507268B2 (ja) | 2016-01-22 | 2017-01-10 | 撮影支援装置及び撮影支援方法 |
| EP17741248.3A EP3407590B1 (en) | 2016-01-22 | 2017-01-10 | Imaging support device and imaging support method |
| US16/015,267 US10739274B2 (en) | 2016-01-22 | 2018-06-22 | Imaging support device and imaging support method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016-010710 | 2016-01-22 | ||
| JP2016010710 | 2016-01-22 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US16/015,267 Continuation US10739274B2 (en) | 2016-01-22 | 2018-06-22 | Imaging support device and imaging support method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017126368A1 true WO2017126368A1 (ja) | 2017-07-27 |
Family
ID=59361582
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/000503 WO2017126368A1 (ja) | 2016-01-22 | 2017-01-10 | 撮影支援装置及び撮影支援方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10739274B2 (ja) |
| EP (1) | EP3407590B1 (ja) |
| JP (1) | JP6507268B2 (ja) |
| CN (1) | CN108476282B (ja) |
| WO (1) | WO2017126368A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020027574A (ja) * | 2018-08-17 | 2020-02-20 | 株式会社東芝 | 自律移動装置、方法及び3次元モデリングシステム |
| JP2020071324A (ja) * | 2018-10-30 | 2020-05-07 | キヤノン株式会社 | 情報処理装置、その制御方法、プログラム、及び記憶媒体 |
| JP2020204835A (ja) * | 2019-06-14 | 2020-12-24 | キヤノン株式会社 | 情報処理装置、システム、情報処理方法及びプログラム |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6891071B2 (ja) * | 2017-08-07 | 2021-06-18 | キヤノン株式会社 | 情報処理装置、撮像システム、撮像方法及びプログラム |
| CN110514664B (zh) * | 2019-08-20 | 2022-08-12 | 北京信息科技大学 | 一种筒子纱纱杆定位检测机器人及方法 |
| US20220001761A1 (en) * | 2020-07-02 | 2022-01-06 | Abb Schweiz Ag | Systems and Methods for Electric Vehicle Charging Using Image Capturing Devices |
| CN112197746B (zh) * | 2020-09-16 | 2022-06-21 | 上海建工四建集团有限公司 | 一种清水砖墙表面风化程度智能检测设备及检测方法 |
| US20230242279A1 (en) * | 2022-02-03 | 2023-08-03 | The Boeing Company | Automated method and system for aircraft inspection with data validation |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05334480A (ja) * | 1992-06-04 | 1993-12-17 | Olympus Optical Co Ltd | バーコード読取装置 |
| JP2003015218A (ja) * | 2001-07-03 | 2003-01-15 | Ricoh Co Ltd | 投影型表示装置 |
| JP2006309742A (ja) | 2005-03-30 | 2006-11-09 | Pentax Corp | 撮影装置 |
| JP2007280282A (ja) | 2006-04-11 | 2007-10-25 | Oriental Consultants:Kk | 構造物の点検記録システム |
| JP2009085785A (ja) | 2007-09-28 | 2009-04-23 | Sanyo Electric Co Ltd | クラック幅計測システム、操作装置、クラック幅計測方法、及びクラック幅計測プログラム |
| JP2010216829A (ja) * | 2009-03-13 | 2010-09-30 | Constec Engi Co | 欠陥検査装置 |
| JP2012129754A (ja) * | 2010-12-14 | 2012-07-05 | Fuji Xerox Co Ltd | 画像処理装置及びプログラム |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4626007B2 (ja) * | 1999-06-14 | 2011-02-02 | 株式会社ニコン | 画像処理方法、画像処理プログラムを記録した機械読み取り可能な記録媒体、および画像処理装置 |
| WO2007097431A1 (ja) * | 2006-02-23 | 2007-08-30 | Matsushita Electric Industrial Co., Ltd. | 画像補正装置、方法、プログラム、集積回路、システム |
| JP5591570B2 (ja) | 2010-03-23 | 2014-09-17 | オリンパス株式会社 | 画像処理装置、画像処理方法及びプログラム |
| US8432392B2 (en) * | 2010-09-02 | 2013-04-30 | Samsung Electronics Co., Ltd. | Display system with image conversion mechanism and method of operation thereof |
| US8331670B2 (en) * | 2011-03-22 | 2012-12-11 | Konica Minolta Laboratory U.S.A., Inc. | Method of detection document alteration by comparing characters using shape features of characters |
| US9696897B2 (en) * | 2011-10-19 | 2017-07-04 | The Regents Of The University Of California | Image-based measurement tools |
| CN102692347A (zh) * | 2012-05-08 | 2012-09-26 | 浙江工业大学 | 疲劳裂纹扩展试验摄像头自动调整图像采集装置及方法 |
| US10783615B2 (en) * | 2013-03-13 | 2020-09-22 | Kofax, Inc. | Content-based object detection, 3D reconstruction, and data extraction from digital images |
| CA2951960A1 (en) * | 2014-06-25 | 2015-12-30 | Retailmenot, Inc. | Apparatus and method for mobile-dispatcher for offer redemption work flows |
| CN104469344B (zh) * | 2014-12-03 | 2017-03-01 | 北京智谷技术服务有限公司 | 光场显示控制方法和装置、光场显示设备 |
| US10255521B2 (en) * | 2016-12-12 | 2019-04-09 | Jack Cooper Logistics, LLC | System, method, and apparatus for detection of damages on surfaces |
| WO2019213297A1 (en) * | 2018-05-02 | 2019-11-07 | Stable Auto Corporation | Method and system for automated vehicle charging |
-
2017
- 2017-01-10 WO PCT/JP2017/000503 patent/WO2017126368A1/ja active Application Filing
- 2017-01-10 JP JP2017562520A patent/JP6507268B2/ja active Active
- 2017-01-10 CN CN201780006368.0A patent/CN108476282B/zh active Active
- 2017-01-10 EP EP17741248.3A patent/EP3407590B1/en active Active
-
2018
- 2018-06-22 US US16/015,267 patent/US10739274B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05334480A (ja) * | 1992-06-04 | 1993-12-17 | Olympus Optical Co Ltd | バーコード読取装置 |
| JP2003015218A (ja) * | 2001-07-03 | 2003-01-15 | Ricoh Co Ltd | 投影型表示装置 |
| JP2006309742A (ja) | 2005-03-30 | 2006-11-09 | Pentax Corp | 撮影装置 |
| JP2007280282A (ja) | 2006-04-11 | 2007-10-25 | Oriental Consultants:Kk | 構造物の点検記録システム |
| JP2009085785A (ja) | 2007-09-28 | 2009-04-23 | Sanyo Electric Co Ltd | クラック幅計測システム、操作装置、クラック幅計測方法、及びクラック幅計測プログラム |
| JP2010216829A (ja) * | 2009-03-13 | 2010-09-30 | Constec Engi Co | 欠陥検査装置 |
| JP2012129754A (ja) * | 2010-12-14 | 2012-07-05 | Fuji Xerox Co Ltd | 画像処理装置及びプログラム |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3407590A4 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020027574A (ja) * | 2018-08-17 | 2020-02-20 | 株式会社東芝 | 自律移動装置、方法及び3次元モデリングシステム |
| JP2020071324A (ja) * | 2018-10-30 | 2020-05-07 | キヤノン株式会社 | 情報処理装置、その制御方法、プログラム、及び記憶媒体 |
| JP7289626B2 (ja) | 2018-10-30 | 2023-06-12 | キヤノン株式会社 | 情報処理装置、その制御方法、プログラム、及び記憶媒体 |
| US11729494B2 (en) | 2018-10-30 | 2023-08-15 | Canon Kabushiki Kaisha | Information processing apparatus, control method therefor, and storage medium |
| JP2020204835A (ja) * | 2019-06-14 | 2020-12-24 | キヤノン株式会社 | 情報処理装置、システム、情報処理方法及びプログラム |
| JP7337557B2 (ja) | 2019-06-14 | 2023-09-04 | キヤノン株式会社 | 情報処理装置、システム、情報処理方法及びプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6507268B2 (ja) | 2019-04-24 |
| JPWO2017126368A1 (ja) | 2018-11-29 |
| CN108476282B (zh) | 2020-07-17 |
| CN108476282A (zh) | 2018-08-31 |
| US10739274B2 (en) | 2020-08-11 |
| EP3407590A1 (en) | 2018-11-28 |
| EP3407590A4 (en) | 2019-02-13 |
| US20180299387A1 (en) | 2018-10-18 |
| EP3407590B1 (en) | 2021-02-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2017126368A1 (ja) | 撮影支援装置及び撮影支援方法 | |
| US10762619B2 (en) | Imaging support device and imaging support method | |
| US10748269B2 (en) | Structure member specification device and structure member specification method | |
| JP6450481B2 (ja) | 撮像装置及び撮像方法 | |
| JP5337805B2 (ja) | 局所的位置決定システムとその方法 | |
| JP6712330B2 (ja) | 撮影制御装置、撮影制御方法及びプログラム | |
| US11107240B2 (en) | Self position estimation device, self position estimation method, program, and image processing device | |
| JP7138856B2 (ja) | 俯瞰映像提示システム | |
| JP6712358B2 (ja) | 画像処理装置、カメラ装置、および画像処理方法 | |
| US10742874B2 (en) | Imaging plan generation device, imaging plan generation method, and program | |
| JP7152201B2 (ja) | 免震装置の検査システムおよび検査方法 | |
| JP2021155179A (ja) | クレーン用撮影システム及びプログラム | |
| WO2022201891A1 (ja) | 情報処理装置及び情報処理方法 | |
| Ngeljaratan | Structural Health Monitoring and Seismic Response Assessment of Civil Infrastructure Using Target-Tracking Digital Image Correlation | |
| JP2018031588A (ja) | 観察装置および観察方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17741248 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2017562520 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2017741248 Country of ref document: EP |
|
| ENP | Entry into the national phase |
Ref document number: 2017741248 Country of ref document: EP Effective date: 20180822 |