WO2017009986A1 - 検査装置 - Google Patents
検査装置 Download PDFInfo
- Publication number
- WO2017009986A1 WO2017009986A1 PCT/JP2015/070307 JP2015070307W WO2017009986A1 WO 2017009986 A1 WO2017009986 A1 WO 2017009986A1 JP 2015070307 W JP2015070307 W JP 2015070307W WO 2017009986 A1 WO2017009986 A1 WO 2017009986A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- mover
- air
- pair
- component
- stator
- Prior art date
Links
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/01—Subjecting similar articles in turn to test, e.g. "go/no-go" tests in mass production; Testing objects at points as they pass through a testing station
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R1/00—Details of instruments or arrangements of the types included in groups G01R5/00 - G01R13/00 and G01R31/00
- G01R1/02—General constructional details
- G01R1/04—Housings; Supporting members; Arrangements of terminals
- G01R1/0408—Test fixtures or contact fields; Connectors or connecting adaptors; Test clips; Test sockets
- G01R1/0416—Connectors, terminals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/26—Testing of individual semiconductor devices
- G01R31/2601—Apparatus or methods therefor
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/28—Testing of electronic circuits, e.g. by signal tracer
- G01R31/2801—Testing of printed circuits, backplanes, motherboards, hybrid circuits or carriers for multichip packages [MCP]
- G01R31/2806—Apparatus therefor, e.g. test stations, drivers, analysers, conveyors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/28—Testing of electronic circuits, e.g. by signal tracer
- G01R31/2801—Testing of printed circuits, backplanes, motherboards, hybrid circuits or carriers for multichip packages [MCP]
- G01R31/281—Specific types of tests or tests for a specific type of fault, e.g. thermal mapping, shorts testing
- G01R31/2813—Checking the presence, location, orientation or value, e.g. resistance, of components or conductors
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K13/00—Apparatus or processes specially adapted for manufacturing or adjusting assemblages of electric components
- H05K13/08—Monitoring manufacture of assemblages
- H05K13/082—Integration of non-optical monitoring devices, i.e. using non-optical inspection means, e.g. electrical means, mechanical means or X-rays
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R27/00—Arrangements for measuring resistance, reactance, impedance, or electric characteristics derived therefrom
- G01R27/02—Measuring real or complex resistance, reactance, impedance, or other two-pole characteristics derived therefrom, e.g. time constant
Definitions
- the present invention relates to an inspection apparatus for inspecting components mounted on a circuit board.
- Patent Documents 2 and 3 describe an inspection apparatus that includes a probe and measures the electrical characteristics of the component by contact with the probe.
- Patent Document 1 describes an inspection device that measures electrical characteristics by sandwiching a component placed on a holding base from both ends. In this inspection apparatus, air is supplied from the blower port portion 28 along the V groove of the holding table, and the measured components on the V groove are sent to the introduction port portion 7 ′. The defective product is discarded, and the non-defective product is used for mounting on the circuit board.
- An object of the present invention is to satisfactorily drop a part from a measuring element after the measurement of the electric characteristic in an inspection apparatus capable of automatically measuring the electric characteristic of the part.
- An inspection apparatus includes a pair of measuring elements that can approach and separate from each other and can grasp a component and measure electrical characteristics, and at least one of a pair of facing surfaces of the pair of measuring elements facing each other. And an air supply device for supplying air to the device. If air is supplied to at least one opposing surface by the air supply device, components attached to the opposing surface can be dropped well.
- the mounting machine shown in FIG. 1 mounts components on a circuit board, and includes an apparatus main body 2, a circuit board transport and holding device 4, a component supply device 6, a head moving device 8, and the like.
- the circuit board transport and holding device 4 transports and holds the circuit board P (hereinafter abbreviated as “substrate P”) in a horizontal posture.
- substrate P the circuit board P
- the width direction is the y direction
- the thickness direction of the substrate P is the z direction.
- the y direction and the z direction are the front-rear direction and the vertical direction of the mounting machine, respectively. These x direction, y direction, and z direction are orthogonal to each other.
- the component supply device 6 supplies electronic components (hereinafter abbreviated as components) s to be mounted on the board P, and includes a plurality of tape feeders 14 and the like.
- the head moving device 8 holds the mounting head 16 and moves it in the x, y, and z directions.
- the mounting head 16 has a suction nozzle 18 that sucks and holds the component s.
- Reference numeral 20 denotes a camera.
- the camera 20 captures the part s held by the suction nozzle 18, and based on the image captured by the camera 20, it is determined whether or not the part s is to be mounted on the circuit board P. Determined.
- Reference numeral 22 denotes an inspection apparatus.
- the inspection device 22 measures and inspects the electrical characteristics of the component s.
- the electrical characteristic of the part s is measured, and whether or not the measured electrical characteristic matches the information (electrical characteristic) regarding the part s included in the job information, that is, the part to be used for the next operation It is determined whether or not it matches the electrical characteristics provided by s.
- the electrical characteristics of the component s include L (inductance), C (capacitance), R (resistance), Z ′ (impedance), and the like, and one or more of these are measured by the inspection device 22.
- the inspection device 22 is provided in the main body of the circuit board conveyance holding device 4 through the trash box 26. Although the waste bin 26 and the inspection device 22 are connected by a waste passage 28, the component s whose electrical characteristics are measured is accommodated in the waste bin 26 through the waste passage 28.
- the inspection device 22 is provided in the trash box 26 so that the height can be adjusted.
- a base portion 30 is engaged with the trash box 26 so as to be movable up and down, and a fastening portion 31 (see FIGS. 3, 4, and 10) in which a main body 29 includes a bolt and a nut.
- the base portion 30 and the main body 29 are integrally held so as to be movable up and down.
- the inspection device 22 includes (i) the main body 29 and the base portion 30, (ii) a holding base 32 capable of holding the component s, and (iii) a stator 34 and a mover 36. (Iv) a mover moving device 41 for moving the mover 36 toward and away from the stator 34, and (vi) electricity. And an LCR detection unit 42 as an automatic characteristic detection unit.
- the component s can have electrodes at both ends and can be gripped by a pair of measuring elements 37. As the component s, for example, what is called a square chip is applicable.
- the holding base 32 includes a component placement portion 44 and a placement portion holding body 46 that holds the component placement portion 44.
- a V-groove 44c is formed on the upper surface of the component placement portion 44, and the component s is placed thereon. Since the shape is V-shaped, the position of the component s is determined with high accuracy.
- the component mounting portion 44 can be made of a material that has conductivity and wear resistance and is difficult to oxidize.
- the component placement unit 44 is electrically connected to the base unit 30 via a plurality of conductive members, but the component placement unit 44 is also grounded when the base unit 30 is grounded.
- the component mounting portion 44 abuts on the mounting portion holding body 46 and is fixed by the fastening portion 47, and the mounting portion holding body 46 is attached to the main body 29 with a stopper 80 (see FIG. 3).
- the main body 29 is fixed to the base portion 30 by the fastening portion 31.
- the mounting part holding body 46, the stopper 80, the main body 29, the base part 30, the fastening parts 31, 47, etc. have electroconductivity. Therefore, the component mounting part 44 is grounded.
- the component placement unit 44 is manufactured from a conductive material and is grounded, so that the charge of the component s placed on the component placement unit 44 can be eliminated.
- the component mounting part 44 is manufactured with the material which has abrasion resistance, abrasion of the component mounting part 44 can be suppressed and durability can be improved. Furthermore, the component mounting part 44 can be made difficult to rust by being manufactured from a material that is difficult to oxidize, that is, a material that can form a passive film that is a metal oxide film. Rust can be made difficult to adhere to the component s, and a decrease in measurement accuracy of the electrical characteristics of the component s can be suppressed.
- the component mounting part 44 can be manufactured by an aluminum alloy or a stainless material.
- the stator 34 and the mover 36 have opposing surfaces 34f and 36f that face each other, and the component s is gripped by the pair of opposing surfaces 34f and 36f.
- the stator 34 is fixed to the main body 29 via a stator holder 55.
- the mover 36 is held by a mover holder 56 so as to be movable integrally, and can be moved toward and away from the stator 34.
- the opposing surface 36f has a triangular cross section and is movable along the V groove 44c.
- the shape of the facing surface 36f of the mover 36 is substantially the shape corresponding to the V-groove 44c, and the facing surface 36f of the mover 36, the facing surface 34f of the stator 34, and the V-groove 44c of the holding base 32 are Located at almost the same height. Therefore, regardless of the part s in the V groove 44c, the part s can be gripped by the pair of opposed surfaces 34f and 36f.
- the mover 36 is a longitudinal member extending in the y direction (movement direction), and is held by the mover holding body 56 at the retracted end.
- the rear portion of the front end portion including the facing surface 36f has a shape that does not have a portion protruding from the front end portion in the x direction.
- the holding table 32 and the mover 36 can be moved relative to each other, and the holding table 32 can move forward of the facing surface 36f with the bottom of the V-groove 44 positioned below the mover 36. It is possible to move backward.
- an electric circuit 58 including a pair of measuring elements 37 including a movable element 36 and a stator 34, an LCR detection unit 42, a power supply device (not shown), and the like is formed. A current is supplied between the stator 34 and the mover 36, and the flowing current is detected.
- the LCR detection unit 42 is not limited to a detection unit that detects L, C, and R, and can detect one or more physical quantities representing electrical characteristics such as L, C, R, and Z ′.
- Reference numerals 58a and 58b in FIGS. 2 to 4 are connecting portions of the pair of measuring elements 37 to the electric circuit 58.
- a cover unit 50 is attached to the holding table 32.
- the cover part 50 includes a pair of cover plate parts 52 and 54 provided on both sides of the V-groove 44c so as to be separated from each other in the x direction.
- the cover plate portions 52 and 54 are respectively provided on the stator 34 side of the holding base 32 and extend in the y direction and the z direction, that is, in the moving direction and the vertical direction of the holding base 32 and the mover 36.
- the plate member has a bent shape.
- the cover plate portion 52 has a groove shape in a plan view, and includes a bottom plate portion 52a and side plate portions 52b and 52c provided on both sides of the bottom plate portion 52a so as to be separated in the x direction.
- the bottom plate portion 52a has a shape in which the lower portion is bent, has an L shape in a side view, and is attached to the side surface on the stator 34 side of the component placement portion 44 in the upper portion. Further, at the forward end position of the holding base 32, the lower portion of the bottom plate portion 52 is located above the stator holding body 55, and the side plate portion 52 b is located outside the stator 34 and above the stator holding body 55. The side plate portion 52c is located outside the side plate portion 52b and outside the stator holding body 55. The side plate portion 52 c has a larger vertical dimension than the side plate portion 52 b, and the lower end portion extends to the vicinity of the opening 29 a of the main body 29.
- the cover plate portion 54 is attached to the placement portion holding body 46 on the opposite side of the cover plate portion 52 with respect to the V groove 44c.
- the cover plate portion 54 is located outside the stator holder 55 at the forward end position of the holding base 32.
- the cover plate portion 54 has a shape bent in the vertical direction, and a lower end portion extends to the vicinity of the opening 29 a of the main body 29. Further, the dimension in the y direction of the side plate portion 52c and the cover plate portion 54 is such that almost the entire space between the pair of facing surfaces 34f and 36f is at least once when the stator 34 and the mover 36 are separated from each other. Can be covered from the x direction.
- the cover part 50 fulfill
- an opening 60a of an air passage 60 facing the facing surface 36f of the mover 36 is formed on a member on the stator side (for example, an upper portion of the stator 34 or an upper portion of the stator 34 of the stator holder 55 or the main body 29). Is formed.
- the air passage 60 includes an air ejection passage 60 s extending generally in the y direction, an internal passage 60 h formed in the main body 29, and the like.
- the air ejection passage 60s extends while being inclined downward as it approaches the mover 36, and when the mover 36 is located away from the stator 34, the extension line k is formed on the opposing surface 36f of the mover 36. It extends above the portion R or reaches the portion R.
- the portion R is a portion where the frequency of gripping the part s on the facing surface 36f of the mover 36 is high, and can be referred to as a gripping portion.
- the air hits the portion where the extension line k of the facing surface 36f intersects from diagonally above.
- Air cylinders 64 and 70 are connected to the air passage 60.
- an ionizer 62 is provided in a portion of the air passage 60 on the downstream side of the air cylinders 64 and 70. The ionizer 62 generates corona discharge to ionize air, and the ionized air can be supplied to the facing surface 36f.
- the holding table moving device 40 includes an air cylinder 64 as a drive source fixedly provided on the main body 29 or the base portion 30.
- the mounting portion holder 46 is connected to the piston rod 66 (see FIG. 5) of the air cylinder 64.
- the air cylinder 64 includes two air chambers 64a and 64b partitioned by a piston inside the cylinder housing, and electromagnetically is provided between the two air chambers 64a and 64b, the air source 68, the air passage 60, and a filter (atmosphere).
- a valve device 69 is provided.
- the electromagnetic valve device 69 may include one or more electromagnetic valves, for example, a direction switching valve and a variable throttle as shown in FIG.
- the direction switching valve controls the moving direction of the mounting portion holding body 46, and the variable throttle controls the movement / stopping of the mounting portion holding body 46.
- the electromagnetic valve device 69 By the electromagnetic valve device 69, the air chamber 64b is communicated with the air source 68 and the air chamber 64a is communicated with the air passage 60, whereby the holding base 32 is moved forward (moved in the direction of arrow F in FIG. 3).
- the chamber 64b is opened to the atmosphere and the air chamber 64a communicates with the air source 68, the holding base 32 is moved backward (moved in the direction of arrow B in FIG. 3).
- the mover moving device 41 includes an air cylinder 70 as a drive source fixedly provided on the main body 29.
- the piston rod 71 of the air cylinder 70 is connected to a mover holder 56 that can move integrally with the mover.
- the two air chambers 70 a and 70 b partitioned by a piston inside the housing of the air cylinder 70 are connected to an air source 68, an air passage 60, and a filter (atmosphere) via an electromagnetic valve device 72.
- the electromagnetic valve device 72 includes one or more electromagnetic valves, and can include, for example, a direction switching valve, a variable throttle, and the like.
- an air supply device 73 is configured by the air cylinders 64, 70, the air passage 60 (including the air ejection passage 60s), the opening 60a, the cover portion 50, the ionizer 62, and the like.
- the air supply device 73 is also a mover supply unit and a drive source interlocking type supply unit.
- the facing surface 36f corresponds to the supply target surface.
- the structure of the electromagnetic valve devices 69 and 72 is not limited to that of the present embodiment. For example, one three-position valve can be included, or a plurality of on-off valves can be included. It is not essential to provide the ionizer 62.
- a pair of guide rods 74 and 75 extending in the y direction are provided between the mover holding body 56 and the main body 29, and extended in the y direction between the holding base 32 and the mover holding body 56.
- a pair of guide rods 76 and 77 are provided.
- One end portions of the guide rods 74 and 75 are connected to the mover holding body 56, and the other end portions are slidably engaged with the main body 29.
- the guide rods 76 and 77 are connected to the mounting portion holding body 46 at one end and are slidably engaged with the mover holding body 56.
- a stopper 82 is provided on the stator side of the mover holder 56, and a stopper 80 is provided on a portion of the main body 29 that holds the stator holder 55.
- the stopper 82 defines the approach limit between the mover holder 56 and the holder 32 (mounting part holder 46), and the stopper 80 is provided with the stator 34 (main body 29) and the holder 32 (placement). This defines the approach limit with the part holder 46).
- the guide rods 74 to 77 are shared by the holding table moving device 40 and the mover moving device 41, and the stoppers 80 and 82 can be considered as components of the holding table moving device 40.
- the mounting machine includes a control device 100.
- the control device 100 includes a controller 102 mainly composed of a computer and a plurality of drive circuits 104.
- the controller 102 includes an execution unit 110, a storage unit 112, an input / output unit 114, and the like.
- the substrate transfer holding device 4, the component supply device 6, and the head moving device 8 each include a drive circuit 104.
- the mover moving device 41 and the electromagnetic valve devices 69 and 72 of the holding table moving device 40 are connected.
- an LCR detection unit 42 a display 116, a mover position sensor 118, a holding stand position sensor 120, a nozzle height sensor 122 for detecting the height of the nozzle 18, and the like are connected.
- the storage unit 112 stores a plurality of programs and tables such as the LCR detection program represented by the flowchart of FIG. Further, time is measured by a timer 124 provided in the controller 102.
- the substrate conveyance holding device 4, the component supply device 6, the head moving device 8, and the like are controlled by individual control devices. It can also be made.
- the operation of the mounting machine will be described.
- the tape feeder 14 is replaced, etc.
- the setup is changed, the electrical characteristics of the parts s held by the tape feeder 14 are measured, and the tape It is inspected whether the feeder 14 (or part s) is appropriate. In addition, the inspection result is displayed on the display 116. If it is inappropriate, the tape feeder 14 is replaced.
- the electrical characteristics of the component s are measured by executing the LCR measurement program represented by the flowchart of FIG. FIG. 7B shows the movements of the holding table 32 and the mover 36, and the states of the holding table position sensor 120 and the mover position sensor 118.
- the inspection device 22 is always in the initial state shown in FIG.
- the mover 36 is in the retreat end position, and the holding base 32 is in the advance end position, that is, the position in contact with the stopper 80. In this state, the holding table 32 is in a state of being grounded by internal conduction or the like.
- the mover 36 does not exist above the V-groove 44c of the holding base 32, and the component s can be placed.
- the cover 50 is located on both sides of the stator 34 (separated in the x direction). Both the mover position sensor 118 and the holding stand position sensor 120 are in the ON state.
- step 1 it is determined whether or not a measurement command for the electrical characteristics of the component s has been issued.
- an electrical characteristic measurement command is issued.
- the mounting head 16 is moved in S2, for example, the component s held by the newly attached tape feeder 14 is picked up by the suction nozzle 18, and the V groove 44c of the holding table 32 is picked up. It is put on. It is understood that the component s is placed on the V-groove 44c by lowering the suction nozzle 18 and opening the component s.
- the mover 36 is controlled by the solenoid valve device 72 in S3.
- the mover is moved forward, and the mover position sensor 118 is switched from ON to OFF.
- the opposing surface 36f at the tip of the mover 36 is advanced along the V groove 44c of the component mounting portion 44, and the component s is clamped by the opposing surface 36f and the opposing surface 34f of the stator 34 ⁇ FIG. b) ⁇ .
- the stroke L 1 (see FIG.
- the holding table 32 is moved backward by the control of the electromagnetic valve device 69, and the holding table position sensor 120 is switched from ON to OFF.
- the holding table 32 is retracted until it comes into contact with the stopper 82 ⁇ FIG. 9 (c) ⁇ , and is held at that position.
- the stroke of the holding table 32 during that time is L 2 (see FIG. 3).
- L 2 Ld ⁇ L 1
- the stroke L 2 is set to a size equal to or larger than the set value Lx (L 2 ⁇ Lx), and the component placement unit 44 is separated from the component s by the set value Lx or more.
- the component placement unit 44 is separated from the component s by the set value Lx or more (if the shortest distance between the component placement unit 44 and the component s is greater than the set value Lx), the component placement unit 44 is It is possible to reduce the measurement error of electrical characteristics caused by being located in the vicinity of the component s.
- the set value Lx is a distance at which the component placement unit 44 hardly affects the measurement of the electrical characteristics of the component s, and is a value acquired in advance through experiments or the like.
- This state is a measurement state. Note that the position of the holding table 32 is held by the control of the electromagnetic valve device 69 after the retreat time Ta, which is the time required for the holding table 32 to move back by the stroke L 2, has elapsed since the start of the holding table 32. .
- the backward time Ta is measured by the timer 124.
- the part s is opened by the suction nozzle 18 and is placed on the V-groove 44c.
- Each of the parts s held by the tape feeder 14 is in a state of being charged by static electricity generated due to vibration accompanying transportation of the tape feeder 14, contact with an object, or the like.
- the charged component s is made of a conductive material and is placed on the grounded component placing portion 44 to be discharged or discharged to discharge in the air.
- the static elimination time is the time required to remove the static electricity of the capacity estimated to be possessed by the part s, and is obtained in advance by experiments or theoretically based on the size, characteristics, etc. of the part s. You can do it.
- the determination in S5 is YES, and the electrical characteristics of the component s are measured in S6.
- the measurement time which is the time required for measuring the electrical characteristics, elapses, S7 is executed.
- the measurement time may be determined by the type of the part s or the like, or may be a fixed time. In any case, it is acquired and stored in advance.
- the mover 36 is moved backward by the control of the electromagnetic valve device 72 in S7.
- the mover position sensor 118 is turned on.
- the holding base 32 is moved backward by the control of the electromagnetic valve device 69 ⁇ FIG. 9 (d) ⁇ .
- the stroke until the holding stand 32 comes into contact with the stopper 82 of the mover 36 at the retracted end position from the measurement state is L 1 . Therefore, it can be understood that the holding table 32 has come into contact with the stopper 82 after the backward movement time Tb, which is the time required for the backward movement of the stroke L 1, has elapsed. As shown in FIG.
- the holding base 32 is located behind the facing surface 36f of the mover 36, and does not exist below the pair of facing surfaces 34f, 36f.
- This state is a discarding state.
- the air chamber 64 b is communicated with the air source 68 in the air cylinder 64 and the air chamber 64 a is connected to the air passage 60 in S 9 under the control of the electromagnetic valve device 69. Communicated.
- the holding table position sensor 120 is turned on.
- the holding table 32 is located between the pair of facing surfaces 34f and 36f (the V groove 44 is located below the facing surfaces 34f and 36f), and the space above the V groove 44c is a space. Therefore, the component s can be placed.
- This state is the initial state.
- the facing surface 36f of the mover 36 When the facing surface 36f of the mover 36 is separated from the facing surface 34f of the stator 34, the component s held between them is released. Further, when the mover 36 is retracted, the air chamber 70a of the air cylinder 70 is communicated with the air passage 60, and the cover plate portions 52 and 54 are respectively in the x direction of the space between the pair of facing surfaces 34f and 36f. Located on both sides. Further, when the holding base 32 is moved to the rear of the facing surface 36f of the mover 36, the holding base 32 does not exist below the pair of facing surfaces 34f and 36f, and the space between the pair of facing surfaces 34f and 36f is an opening. 29a, 30a and the waste passage 28 are communicated.
- the air that has flowed out of the air chamber 70a is supplied from the opening 60a to the opposing surface 36f of the mover 36 obliquely from above, but in other words, a space to which air is supplied, in other words, a pair
- the space between the opposing surfaces 34f, 36f is covered by the cover portion 50 from the x direction.
- the air mainly hits the facing surface 36f and then flows downward along the facing surface 36f. Therefore, even if the component s does not fall from the facing surface 36f and adheres to the portion R, it can be dropped well.
- the air flows in a spiral shape inside the cover portion 50, even if the component s is attached to the facing surface 34f of the stator 34, the air can be dropped. Further, the component s dropped from the opposing surfaces 34f and 36f and placed on the holding table 32 can also be dropped by air. However, in the case where the component s is placed on the V groove 44 and does not fall by air. Even if it exists, it can fall reliably by advance of the opposing surface 36f of the needle
- the cover portion 50 it is possible to prevent the dropped component s from scattering. Since the side plate portion 52c of the cover plate portion 52 and the lower end portion of the cover plate portion 54 extend to the vicinity of the opening 29a of the main body 29, the component s is satisfactorily accommodated in the trash box 26 from the opening 29a through the disposal passage 28. be able to.
- the opposing surfaces 36f and 34f of the mover 36 and the stator 34 can be electrically neutralized, and the measurement accuracy of the electrical characteristics of the next component s can be improved. Can be improved.
- the air chamber 64a communicates with the air ejection passage 60s when the holding table 32 moves forward (S9). Even when the state is shifted from the discarding state to the initial state, air can be supplied to the facing surface 36f of the movable element 36, so that the charge removal of the facing surface 36f of the movable element 36 can be performed satisfactorily.
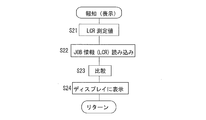
- the measured electrical characteristics are compared with the electrical characteristics included in the job information, and it is determined whether or not the part s is to be used for work (JOB) to be performed from now on. Is displayed on the display 116.
- the measured value of the electrical characteristic of the part s is acquired, and in S22, corresponding information is read from the job information of the next job.
- these are compared to determine whether or not they match. Whether they match or not, the determination result is displayed on the display 116. If they do not match, an operation such as replacement with an appropriate tape feeder is performed.
- the component mounting portion 44 is manufactured with a conductive material and is grounded. As a result, it is possible to satisfactorily remove the component s placed on the component placement unit 44 before measuring the electrical characteristics. On the other hand, when the component s is charged, it is difficult to measure the impedance of the component s. On the other hand, in this embodiment, since the charge removal of the component s is performed well, the impedance of the component s can be measured well. Further, the part s can be dropped into the disposal passage 28 in parallel with the retreat of the mover 36. Compared to the case where the retreat of the mover and the delivery of the part s are performed in separate steps, The time required for measuring the electrical characteristics can be shortened.
- the movement control is performed by the part that stores S4, 7, and 8 of the LCR measurement program of the controller 102, the part that executes it, the timer 124, the mover position sensor 118, the holding stand position sensor 120, and the like.
- a device and a relative movement control device are configured.
- the part for storing S4, the part for executing, etc. constitute the control unit for measurement
- the part for storing S8, the part for executing, etc. constitute the controller for discarding
- the part for storing S9 execute
- the preparation control unit is configured by the parts to be performed.
- the movement control device is also a holding table movement control device and a relative movement control unit.
- the air cylinder 70 corresponds to a mover cylinder
- the air cylinder 64 corresponds to a holding table cylinder.
- the air supply device 73 is also a mover supply unit and a drive source interlocking type supply unit.
- an electrical characteristic acquisition apparatus is comprised by the part which memorize
- both of a pair of measuring elements can be moved, and a holding stand can also be fixed to a main body. Even in such a case, the pair of measuring elements grips the component s placed on the holding table, and the pair of measuring elements are moved, so that the holding table can be separated from the component s by a set value or more. . Further, the holding table can be moved in the vertical direction. Even in this case, the holding base can be separated from the component s by a set value or more in a state where the component s is clamped by the pair of measuring elements. Further, the air ejection passage may be provided in the side portion of the main body 29 of the inspection device 22 in a state having an opening that generally opens in the x direction.
- one of the cover plate portions 52 and 54 can be eliminated (for example, the cover plate portion 54 can be eliminated), and an air ejection passage having an opening in the x direction can be provided on the missing side.
- the air is supplied toward the cover plate portion 52 along the opposing surfaces 34f and 36f (surfaces extending in the xz direction), thereby adhering to the pair of opposing surfaces 34f and 36f. It is possible to drop the parts s.
- the holding base 32 can be retracted (for example, simultaneously retracted) as the mover 36 is retracted.
- the state in which the holding table 32 and the mover 36 are retracted can be set as a discarding state.
- the mover position sensor 118 and the holding stand position sensor 120 are not essential.
- the electromagnetic valve devices 69 and 72 can be controlled by measurement by the timer 124.
- the present invention can be carried out in various modifications and improvements based on the knowledge of those skilled in the art, in addition to the aspects described in the above embodiments, such as an air supply device is not essential.
- An inspection device included in a mounting machine that picks up a component supplied by a component supply device and mounts the component on a circuit board, A holding table capable of holding parts; A pair of measuring elements that can be approached and separated from each other, and that can measure the electrical characteristics of the part with the part interposed therebetween, A holding table moving device for moving the holding table; A holding table movement control device that controls the holding table movement device, and the holding table movement control device is in a clamped state where the pair of measuring elements hold the parts held by the holding table, An inspection apparatus comprising: a measurement control unit that sets a measurement state in which the holding table is separated from the component by a set value or more so that the electrical characteristics of the component can be measured.
- the holding table may be movable in a direction parallel to the approaching / separating direction of the pair of measuring elements, or may be movable in the intersecting direction.
- the set value can be a distance at which the influence of the holding table is difficult to measure the electrical characteristics of the component.
- the discarding control unit sets the holding table to a discarding state in which the holding table does not exist below between the pair of opposed surfaces separated from each other.
- the inspection apparatus according to (1) or (2).
- the inspection apparatus according to item (3) including a preparation control unit for setting the state.
- the mounting device includes a disposal passage connected to the inspection device, and the main body of the inspection device has an opening that can communicate with the disposal passage. Inspection device described in one.
- the position and size of the opening can be determined so as to be in an open state below at least between the pair of opposed surfaces in the discarded state.
- (6) Electrical characteristic acquisition in which the inspection apparatus supplies current between the pair of measuring elements and detects the current flowing between the pair of measuring elements to acquire the electrical characteristics of the component A delay type measurement that starts measurement of the electrical characteristics of the component when a set time has elapsed since the component was placed on the holding table.
- the inspection apparatus according to any one of (1) to (5), including a section.
- the set time can be, for example, a static elimination time that is a time required for static elimination of a component.
- the static elimination time may be a time determined by a part or a predetermined time regardless of the part.
- the pair of measuring elements includes a stator fixed to the main body and a movable element movable relative to the stator
- the inspection apparatus includes a mover moving device that moves the mover relative to the stator, and a mover movement control unit that controls the mover moving device to move the pair of measuring elements closer to or away from each other.
- the inspection apparatus according to any one of items (1) to (6).
- the inspection apparatus includes a coupling mechanism that couples the mover and the holding base so as to be movable relative to each other.
- the mover may have a longitudinal shape extending in parallel with the moving direction of the mover.
- the holding base when the holding base is located in front of the tip of the mover, it may be located behind.
- the holding table has a V-groove which is a groove having a V-shaped cross section, and a cross section of at least one tip of the pair of measuring elements has a triangular shape corresponding to the V-groove.
- the inspection apparatus according to any one of items (1) to (8).
- An inspection device included in a mounting machine that picks up a component supplied by a component supply device and mounts the component on a circuit board, A holding table capable of holding parts; A pair of measuring elements that can be approached and separated from each other, and can measure the electrical characteristics of the parts with the parts interposed therebetween; A relative movement device for moving the pair of measuring elements and the holding table relative to each other; A relative movement control device that controls the relative movement device, and the relative movement control device is configured such that the pair of measuring elements grips the component held by the holding base, and the component and the component
- An inspection apparatus comprising: a measurement control unit that sets a measurement state in which the electrical characteristics of the component can be measured by separating the holding table by a set value or more.
- Relative movement device can be (a) a device that fixes a holding base and moves a pair of measuring elements, or (b) one of a pair of measuring elements that is fixed, and moves the other of the pair of measuring elements and the holding table. It can be used as a device to be used.
- the pair of measuring elements are moved relative to the holding table, and the parts and the holding table are set. This corresponds to the case where the distance is more than the value.
- the discarding step of separating the pair of measuring elements from each other and retracting the holding base from a lower region between the opposing surfaces of the pair of measuring elements The inspection method according to item (11), further including a preparatory step in which the holding base is moved downward between the opposing surfaces of the pair of measuring elements so as to hold the component in an initial state.
- the pair of measuring elements may be separated and the holding table retracted in order or in parallel.
- An inspection device included in a mounting machine that picks up a component supplied by a component supply device and mounts the component on a circuit board, A holding base that has conductivity and holds parts;
- An inspection apparatus comprising: an electrical property acquisition device that grips the component held on the holding table and acquires an electrical property of the component in a state where the component is separated from the holding table.
- the inspection device described in this section can employ the technical feature described in any one of the items (1) to (12).
- the pair of measuring elements When the pair of measuring elements are brought close to each other, the pair of opposed surfaces sandwich the component, measure the electrical characteristics of the component, and separated from each other, whereby the pair of opposed surfaces
- Items (1) to (13) include an air supply device that supplies air to a supply target surface that is at least one of the pair of opposed surfaces when the pair of measuring elements are separated from each other.
- the inspection device according to any one of the items).
- the case where the pair of measuring elements are separated corresponds to a part or the whole process during the separation, a separation start time, a separation end time, and the like while they are separated from each other.
- the air supply device includes an ionizer that ionizes the air, and supplies the ionized air to the supply target surface.
- the air supply device includes an air passage having an opening facing the supply target surface. When the supply target surface is one of a pair of opposing surfaces, one opening that faces the one supply target surface is provided, and when the supply target surface is both of the pair of opposing surfaces, Two openings are provided opposite to each other.
- the air passage includes an air ejection passage that is inclined in a downward direction as it approaches the supply target surface.
- an inclination angle of the air ejection passage is an angle at which the air hits a portion of the supply target surface that grips the component.
- the pair of measuring elements includes a stator fixed to the main body and a movable element capable of approaching and separating from the stator, Item (14) to (14), wherein the air supply device includes a mover supply unit that supplies the air to the opposed surface of the mover that is the supply target surface when the mover is separated from the stator.
- the inspection device includes a mover moving device that includes a mover cylinder and moves the mover toward and away from the stator by the operation of the mover cylinder;
- the air supply device includes a drive source interlocking type supply unit that supplies air that is allowed to flow out of the cylinder for the mover to the opposing surface of the mover as the mover is separated from the stator (19).
- Inspection device according to item.
- the inspection apparatus according to any one of (1) to (20), wherein the inspection apparatus includes a cover portion that covers a space between the pair of facing surfaces separated from each other. The cover portion covers most of the space between the pair of facing surfaces, and does not necessarily cover the entire space between the pair of facing surfaces, and may cover the surface with a slight gap. Good.
- the cover is attached to the holding table, and covers most of the pair of opposing surfaces from the side with the holding table in the retracted end position. Inspection equipment.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Computer Hardware Design (AREA)
- General Engineering & Computer Science (AREA)
- Operations Research (AREA)
- Manufacturing & Machinery (AREA)
- Testing Electric Properties And Detecting Electric Faults (AREA)
- Supply And Installment Of Electrical Components (AREA)
- Testing Of Individual Semiconductor Devices (AREA)
Abstract
Description
図1に示す装着機は、部品を回路基板に装着するものであり、装置本体2,回路基板搬送保持装置4,部品供給装置6,ヘッド移動装置8等を含む。
回路基板搬送保持装置4は、回路基板P(以下、基板Pと略称する)を水平な姿勢で搬送して保持するものであり、図1において、基板Pの搬送方向をx方向、基板Pの幅方向をy方向、基板Pの厚み方向をz方向とする。y方向、z方向は、それぞれ、装着機の前後方向、上下方向である。これら、x方向、y方向、z方向は互いに直交する。部品供給装置6は、基板Pに装着される電子部品(以下、部品と略称する)sを供給するものであり、複数のテープフィーダ14等を含む。ヘッド移動装置8は、装着ヘッド16を保持してx、y、z方向へ移動させるものであり、装着ヘッド16は、部品sを吸着して保持する吸着ノズル18を有する。
部品sの電気的特性としては、L(インダクタンス)、C(キャパシタンス)、R(レジスタンス)、Z′(インピーダンス)等が該当し、検査装置22によってこれらのうちの1つ以上が測定される。
検査装置22は、図2~4,10に示すように、(i)上記本体29およびベース部30、(ii)部品sを保持可能な保持台32、(iii)固定子34および可動子36から成る一対の測定子37、(iv)保持台32を移動させる保持台移動装置40、(v)可動子36を固定子34に対して接近・離間させる可動子移動装置41、(vi)電気的特性検出部としてのLCR検出部42等を含む。本実施例において、部品sは、両端部に電極を有し、一対の測定子37によって把持可能なものとすることができる。部品sとしては、例えば、角チップと称するものが該当する。
部品載置部44は、導電性、耐摩耗性を有し、かつ、酸化が進み難い材料で製造されたものとすることができる。部品載置部44は、複数の導電性を有する部材を介してベース部30に電気的に接続されるが、ベース部30が接地されることにより、部品載置部44も接地される。本実施例においては、部品載置部44が載置部保持体46に当接し、かつ、締結部47によって固定されるとともに、載置部保持体46が本体29にストッパ80(図3参照)を介して当接し、本体29がベース部30に締結部31によって固定される。そして、載置部保持体46、ストッパ80、本体29、ベース部30、締結部31、47等は導電性を有するものである。したがって、部品載置部44は接地されるのである。
このように、部品載置部44が導電性を有する材料で製造され、かつ、接地されることにより、部品載置部44に載置させられた部品sの除電を行うことができる。また、部品載置部44が、耐摩耗性を有する材料で製造されることにより、部品載置部44の摩耗を抑制し、耐久性を向上させることができる。さらに、酸化が進み難い材料、すなわち、金属の酸化被膜である不動態皮膜が形成され得る材料で製造されることにより、部品載置部44が錆び難くすることができる。錆が部品sに付き難くすること等ができ、部品sの電気的特性の測定精度の低下を抑制することができる。例えば、部品載置部44は、アルミニウム合金またはステンレス材料等によって製造されたものとすることができる。
また、可動子36は、本実施例において、y方向(移動方向)に伸びた長手部材であり、後退端において可動子保持体56に保持される。さらに、対向面36fを含む先端部より後部は、先端部よりx方向にはみ出す部分を有さない形状を成す。その結果、保持台32と可動子36とは互いに相対移動可能とされ、保持台32は、V溝44の底部が可動子36を下方に位置する状態で、対向面36fの前方へ移動したり後方へ移動したりすることが可能である。
さらに、可動子36と固定子34とから成る一対の測定子37、LCR検出部42、図示を省略する電源装置等を含む電気回路58が形成される。これら固定子34と可動子36との間に電流が供給されるとともに流れた電流が検出され、これらの関係に基づいて部品sの電気的特性がLCR検出部42によって測定される。LCR検出部42は、L,C,Rを検出する検出部に限らず、L,C,R,Z´等の電気的特性を表す物理量の1つ以上を検出するものとすることができる。なお、図2~4の符号58a、bは、一対の測定子37の電気回路58への接続部である。
また、側板部52c、カバー用板部54のy方向の寸法は、固定子34と可動子36とが互いに離間させられる場合の少なくとも一時期に一対の対向面34f、36fの間の空間のほぼ全体をx方向から覆い得る大きさとされる。
なお、カバー部50は、後述するように、エアの拡散を防止するとともに、エアの噴出によって落下させられた部品sの飛散を防止する機能を果たす。
エア通路60には、エアシリンダ64,70が接続される。また、エア通路60のエアシリンダ64,70の下流側の部分にはイオナイザ62が設けられる。イオナイザ62は、コロナ放電を生起させて空気をイオン化するものであり、対向面36fにイオン化された空気が供給され得る。
本実施例においては、エアシリンダ64,70、エア通路60(エア噴出通路60sを含む)、開口60a、カバー部50、イオナイザ62等によりエア供給装置73が構成される。エア供給装置73は、可動子供給部、駆動源連動型供給部でもある。また、対向面36fが供給対象面に対応する。
なお、電磁弁装置69,72の構造は、本実施例のそれに限らない。例えば、1つの3位置弁を含むものとしたり、複数の開閉弁を含むものとしたりすること等ができる。また、イオナイザ62を設けることは不可欠ではない。
また、図3に示すように、可動子保持体56の固定子側にはストッパ82が設けられ、本体29の固定子保持体55を保持する部分にはストッパ80が設けられる。ストッパ82は、可動子保持体56と保持台32(載置部保持体46)との接近限度を規定するものであり、ストッパ80は、固定子34(本体29)と保持台32(載置部保持体46)との接近限度を規定するものである。
本実施例において、ガイドロッド74~77は、保持台移動装置40、可動子移動装置41に共有され、ストッパ80,82は保持台移動装置40の構成要素であると考えることができる。
なお、図3に示すように、可動子36が後退端位置にある場合のストッパ82の前端部と、保持台32が前進端位置にある場合の載置部保持体46との間の隙間Ldが、可動子36と保持台32との相対移動が許容される距離である。
なお、本実施例においては、制御装置100によって装着機全体が制御される場合について説明したが、基板搬送保持装置4、部品供給装置6、ヘッド移動装置8等がそれぞれ互いに個別の制御装置によって制御されるようにすることもできる。
段取り替えが行われる場合等、新たなテープフィーダ14のセット、テープフィーダ14の交換等が行われた場合等に、そのテープフィーダ14に保持された部品sの電気的特性が測定され、そのテープフィーダ14(または部品s)が適切なものであるか否かが検査される。また、その検査結果がディスプレイ116に表示される。不適切である場合には、テープフィーダ14が取り替えられる。
検査装置22は、常には、図9(a)に示す初期状態にある。可動子36は後退端位置にあり、保持台32は前進端位置、すなわち、ストッパ80に当接した位置にある。この状態において、保持台32は、内部導通等によりアースされた状態にある。保持台32のV溝44cの上方に可動子36が存在せず、部品sを載置可能な状態にある。また、カバー部50は固定子34の両側(x方向に隔たって)に位置する。可動子位置センサ118、保持台位置センサ120は、いずれもON状態にある。
ステップ1(以下、S1と略称する。他のステップについても同様とする)において、部品sの電気的特性の測定指令が出されたか否かが判定される。段取り替えが行われる場合等には電気的特性の測定指令が出される。測定指令が出されると、S2において、装着ヘッド16が移動させられ、例えば、新たに取り付けられたテープフィーダ14に保持された部品sが吸着ノズル18によってピックアップされて、保持台32のV溝44c上に載せられる。吸着ノズル18が下降させられ、部品sが開放されることにより、部品sがV溝44c上に載置させられたことがわかる。
L2=Ld-L1
本実施例においては、ストロークL2は設定値Lx以上の大きさとされていて(L2≧Lx)、部品載置部44が部品sから設定値Lx以上離間させられる。導電性を有する部材(部品載置部44)が電気的特性の測定時に部品sの近傍に位置すると静電誘導が起きたり、渦電流が生じたりする等、電気的特性を正確に検出することができない。それに対して、部品載置部44を部品sから設定値Lx以上離間させれば(部品載置部44と部品sとの最短距離が設定値Lx以上とすれば)、部品載置部44が部品sの近傍に位置することに起因して生じる電気的特性の測定誤差を小さくすることができる。このように、設定値Lxは、部品載置部44が部品sの電気的特性の測定に影響を及ぼし難い距離であり、予め実験等により取得された値である。この状態が測定状態である。
なお、保持台32の後退開始時から、保持台32がストロークL2後退するのに要する時間である後退時間Taが経過した後に、電磁弁装置69の制御により保持台32の位置が保持される。後退時間Taは、タイマ124によって計測される。
そして、電気的特性の測定に要する時間である測定時間が経過すると、S7が実行されるのであるが、測定時間は部品sの種類等によって決まる時間としても、一定の時間としてもよい。いずれにしても予め取得されて記憶されている。
保持台32がストッパ82に当接するまで後退させられると、S9において、電磁弁装置69の制御により、エアシリンダ64においてエア室64bがエア源68に連通させられ、エア室64aがエア通路60に連通させられる。保持台32が前進させられ、ストッパ80に当たると保持台位置センサ120がONとなる。保持台32は、一対の対向面34f、36fの間に位置し(V溝44が対向面34f、36fの間の下方に位置し)、V溝44cの上方が空間とされている。そのため、部品sが載置可能とされる。この状態が初期状態である。
可動子36の後退に伴って、エア室70aから流出させられたエアが開口60aから可動子36の対向面36fに斜め上方から供給されるが、エアが供給される空間、換言すれば、一対の対向面34f、36fの間の空間が、カバー部50によってx方向から覆われる。エアは、主として対向面36fに当たった後、対向面36fに沿って下方へ流れる。そのため、仮に、対向面36fから部品sが落下せず、部分Rに付着していても、それを良好に落下させることができる。また、エアは、カバー部50の内部を渦状に流れるため、仮に、固定子34の対向面34fに部品sが付着していたとしても落下させることができる。さらに、対向面34f、36fから落下して保持台32の上に載った部品sもエアにより落下させ得るが、仮に、V溝44上に部品sが載って、エアにより落下しなかった場合であっても、保持台32の後退に伴う可動子36の対向面36fの前進により確実に落下させることができる。このように、本実施例において、廃棄状態は、部品sが良好に落下させられた状態と考えることができる。
なお、一対の対向面34f、36fから落下した部品sは、開口29a、30a、廃棄通路28を経て良好にごみ箱26へ収容される。
さらに、エアシリンダ64において、保持台32の前進時(S9)にエア室64aがエア噴出通路60sに連通させられる。廃棄状態から初期状態へ移行する場合にも、可動子36の対向面36fにエアを供給することができるのであり、可動子36の対向面36fの除電を良好に行うことが可能となる。
S21において、当該部品sの電気的特性の測定値が取得され、S22において、次のJOBのJOB情報から対応する情報が読み込まれる。S23において、これらが比較され、一致するかどうかが判定される。一致する場合であっても不一致の場合であっても、判定結果はディスプレイ116に表示される。仮に、不一致の場合には、適切なテープフィーダと交換される等の作業が行われる。
さらに、可動子36の後退と並行して部品sを廃棄通路28に落下させることができるのであり、可動子の後退と、部品sの送出とを別の工程で行われる場合に比較して、電気的特性の測定に要する時間を短くすることができる。
また、エアシリンダ70が可動子用シリンダに対応し、エアシリンダ64が保持台用シリンダに対応する。エア供給装置73は、可動子供給部、駆動源連動型供給部でもある。さらに、一対の測定子37、LCR検出部42を含む電気回路58、コントローラ102のS6を記憶する部分、実行する部分等により電気的特性取得装置が構成される。
さらに、S3がクランプ工程に対応し、S4、6が測定工程に対応し、S7,8が廃棄工程に対応し、S9が準備工程に対応する。
また、保持台は、上下方向へ移動可能とすることもできる。その場合であっても、部品sが一対の測定子によってクランプされた状態で、保持台を部品sから設定値以上離間させることができる。
さらに、エア噴出通路を検査装置22の本体29の側部に、概してx方向に開く開口を有する状態で設けることもできる。換言すれば、カバー用板部52,54のいずれか一方をなくし(例えば、カバー用板部54をなくし)、そのなくした側に、x方向に開口を有するエア噴出通路を設けることができる。その結果、エアは、対向面34f、36f(xz方向に伸びた面)に沿って、カバー用板部52に向かって供給されることになり、それにより、一対の対向面34f、36fに付着した部品sを落とすことが可能となる。
また、部品sの電気的特性の測定後に、保持台32を可動子36の後退に伴って後退させる(例えば、同時に後退させる)ことも可能である。この保持台32および可動子36が後退させられる状態を廃棄状態とすることもできる。
さらに、可動子位置センサ118、保持台位置センサ120は不可欠ではない。例えば、タイマ124による計測により電磁弁装置69,72を制御することもできる。また、エア供給装置も不可欠ではない等、本発明は、前記実施形態に記載の態様の他、当業者の知識に基づいて種々の変更、改良を施した形態で実施することができる。
部品を保持可能な保持台と、
互いに接近・離間可能とされるとともに、前記部品を挟んでその部品の電気的特性を測定可能な一対の測定子と、
前記保持台を移動させる保持台移動装置と、
その保持台移動装置を制御する保持台移動制御装置と
を含み、かつ、前記保持台移動制御装置が、前記一対の測定子が前記保持台に保持された前記部品を把持するクランプ状態から、前記保持台を前記部品から設定値以上離間させて、前記部品の電気的特性を測定可能な測定状態とする測定時制御部を含むことを特徴とする検査装置。
保持台は、一対の測定子の接近・離間方向と平行な方向に移動可能としても、交差する方向に移動可能としてもよい。設定値は、例えば、保持台が導電性を有するものである場合において、保持台の影響が部品の電気的特性の測定に及び難い距離とすることができる。
(2)前記保持台を、導電性を有するものとした(1)項に記載の検査装置。
(3)前記一対の測定子が、互いに対向し、前記部品に接触可能な一対の対向面を含み、それら一対の対向面が互いに接近させられることにより前記部品を保持し、互いに離間させられることにより前記部品を放すものであり、
前記保持台移動装置が、前記測定状態から、前記保持台を移動させることにより、前記互いに離間させられた一対の対向面の間の下方に前記保持台が存在しない廃棄状態とする廃棄時制御部を含む(1)項または(2)項に記載の検査装置。
(4)前記保持台移動制御装置が、前記廃棄状態から、前記互いに離間させられた一対の対向面の間の下方へ前記保持台を移動させて、前記保持台が前記部品を保持可能な初期状態とする準備時制御部を含む(3)項に記載の検査装置。
(5)前記装着機が、前記検査装置に接続された廃棄通路を含み、当該検査装置の本体が、前記廃棄通路に連通可能な開口を有する(1)項ないし(4)項のいずれか1つに記載の検査装置。
開口の位置、大きさは、少なくとも、廃棄状態において一対の対向面の間の下方に開口状態にあるように決めることができる。
(6)当該検査装置が、前記一対の測定子の間に電流を供給するとともに前記一対の測定子の間に流れる電流を検出して、前記部品の前記電気的特性を取得する電気的特性取得装置を含み、その電気的特性取得装置が、前記保持台に前記部品が載置させられた時点から設定時間以上が経過した場合に、前記部品の前記電気的特性の測定を開始する遅延型測定部を含む(1)項ないし(5)項のいずれか1つに記載の検査装置。
設定時間は、例えば、部品の除電に要する時間である除電時間とすることができる。除電時間は、部品によって決まる時間であっても、部品に関係なく予め定められた時間であってもよい。
なお、保持台に部品が載置させられている時間を除電時間とすることもできる。
(7)前記一対の測定子が、本体に固定の固定子と、前記固定子に対して相対移動可能な可動子とを含み、
当該検査装置が、前記可動子を前記固定子に対して移動させる可動子移動装置と、その可動子移動装置を制御することにより前記一対の測定子を互いに接近・離間させる可動子移動制御部とを含む(1)項ないし(6)項のいずれか1つに記載の検査装置。
(8)当該検査装置が、前記可動子と前記保持台とを互いに相対移動可能に連結する連結機構を含む(7)項に記載の検査装置。
例えば、可動子は、その可動子の移動方向と平行に伸びた長手形状を成すものとすることができる。また、保持台は、可動子の先端の前方に位置する場合、後方に位置する場合がある。
(9)前記保持台が、横断面がV字状を成す溝であるV溝を有し、前記一対の測定子の少なくとも一方の先端部の横断面が前記V溝に対応する三角形状を成す(1)項ないし(8)項のいずれか1つに記載の検査装置。
部品を保持可能な保持台と、
互いに接近・離間可能とされ、前記部品を挟んでその部品の電気的特性を測定可能な一対の測定子と、
前記一対の測定子と前記保持台とを互いに相対移動させる相対移動装置と、
その相対移動装置を制御する相対移動制御装置と
を含み、かつ、前記相対移動制御装置が、前記一対の測定子が前記保持台に保持された前記部品を把持するクランプ状態から、前記部品と前記保持台とを設定値以上離間させて、前記部品の電気的特性を測定可能な測定状態とする測定時制御部を含むことを特徴とする検査装置。
本項に記載の検査装置には、(1)項ないし(9)項のいずれかに記載の技術的特徴を採用することができる。
相対移動装置は、(a)保持台を固定、一対の測定子を移動させる装置としたり、(b)一対の測定子のうちの一方を固定、一対の測定子の他方と保持台とを移動させる装置としたりすること等ができる。(a)の場合として、例えば、保持台に保持された部品が一対の測定子によってクランプされた状態で、一対の測定子が保持台に対して相対移動させられ、部品と保持台とが設定値以上離間させられる場合が該当する。
前記保持台に保持された部品を、一対の測定子が把持するクランプ工程と、
前記一対の測定子によって把持された前記部品から前記保持台を設定値以上離間させて、前記部品の電気的特性を測定する測定工程と
を含むことを特徴とする検査方法。
本項に記載の検査方法は、(1)項ないし(10)項のいずれかに記載の検査装置において実行され得る。
(12)前記測定工程の実行後に、前記一対の測定子を互いに離間させ、前記保持台を前記一対の測定子の互いに対向する対向面の間の下方領域から退避させる廃棄工程と、
前記保持台を、前記一対の測定子の互いに対向する対向面の間の下方へ侵入させて、前記部品を保持可能な初期状態とする準備工程と
を含む(11)項に記載の検査方法。
廃棄工程において、一対の測定子の離間と保持台の退避とを順番に行っても、並行しておこなってもよい。
導電性を有し、部品を保持する保持台と、
前記保持台に保持された前記部品を把持するとともに、前記部品が前記保持台から離間した状態で前記部品の電気的特性を取得する電気的特性取得装置と
を含むことを特徴とする検査装置。
本項に記載の検査装置は、(1)項ないし(12)項のいずれか1つに記載の技術的特徴を採用することができる。
当該検査装置が、それら一対の測定子が離間させられる場合に、前記一対の対向面のうちの少なくとも一方である供給対象面に、エアを供給するエア供給装置を含む(1)項ないし(13)項のいずれか1つに記載の検査装置。
一対の測定子が離間させられる場合とは、互いに離間している間、離間している間の一部または全行程、離間開始時、離間終了時等が該当する。
(15)前記エア供給装置が、前記エアをイオン化するイオナイザを含み、前記イオン化されたエアを前記供給対象面に供給する(14)項に記載の検査装置。
(16)前記エア供給装置が、前記供給対象面に対向する開口を有するエア通路を含む(14)項または(15)項に記載の検査装置。
供給対象面が一対の対向面の一方である場合には、その一方の供給対象面に対向する開口が1つ設けられ、供給対象面が一対の対向面の両方である場合には、それぞれに対向して開口が2つ設けられる。
(17)前記エア通路が、前記供給対象面に近づくにつれて下方へ行く向きに傾斜したエア噴出通路を含む(16)項に記載の検査装置。
(18)前記エア噴出通路の傾斜角度が、前記エアが前記供給対象面の前記部品を把持する部分の上方に当たる角度とされた(17)項に記載の検査装置。
(19)前記一対の測定子が、本体に固定の固定子と、その固定子に接近・離間可能な可動子とを含み、
前記エア供給装置が、前記可動子が前記固定子から離間させられる場合に、前記供給対象面である前記可動子の対向面に前記エアを供給する可動子供給部を含む(14)項ないし(18)項のいずれか1つに記載の検査装置。
(20)当該検査装置が、可動子用シリンダを備え、その可動子用シリンダの作動により前記可動子を前記固定子に対して接近・離間させる可動子移動装置を含み、
前記エア供給装置が、前記可動子の前記固定子からの離間に伴って前記可動子用シリンダから流出させられるエアを前記可動子の対向面に供給する駆動源連動型供給部を含む(19)項に記載の検査装置。
(21)当該検査装置が、前記一対の対向面が離間した状態で、これらの間を覆うカバー部を含む(1)項ないし(20)項のいずれか1つに記載の検査装置。
カバー部は、一対の対向面の間の大部分を覆うものであり、一対の対向面の間の全体を覆うものとする必要は必ずしもなく、多少の隙間がある状態で覆うものであってもよい。一対の対向面が互いに離間させられる場合の少なくとも一時期に一対の対向面の間の全体を両側から覆うものとすることが望ましい。
(22)前記カバー部が、前記保持台に取り付けられ、前記保持台が後退端位置にある状態で、前記一対の対向面の間の大部分を側から覆うものである(21)項に記載の検査装置。
Claims (7)
- 部品供給装置によって供給された部品をピックアップして、回路基板に装着する装着機に設けられ、
互いに接近させられることにより、一対の対向面が前記部品を挟んで、その部品の電気的特性を測定し、互いに離間させられることにより、前記一対の対向面から前記部品を放す一対の測定子と、
それら一対の測定子が離間させられる場合に、前記一対の対向面のうちの少なくとも一方である供給対象面にエアを供給するエア供給装置と
を含むことを特徴とする検査装置。 - 前記エア供給装置が、前記エアをイオン化するイオナイザを含み、前記イオン化されたエアを前記供給対象面に供給する請求項1に記載の検査装置。
- 前記供給対象面が、前記一対の対向面のいずれか一方とされ、
前記エア供給装置が、前記一方の供給対象面に対向する開口を有するエア通路を含む請求項1または2に記載の検査装置。 - 前記エア通路が、前記一方の供給対象面に近づくにつれて下方へ行く向きに傾斜した噴出通路を含む請求項3に記載の検査装置。
- 前記一対の測定子が、本体に固定の固定子と、その固定子に接近・離間可能な可動子とを含み、
前記エア供給装置が、前記可動子が前記固定子から離間させられる場合に、前記供給対象面である前記可動子の対向面に前記エアを供給する可動子供給部を含む請求項1ないし4のいずれか1つに記載の検査装置。 - 当該検査装置が、可動子用シリンダを備え、その可動子用シリンダの作動により前記可動子を前記固定子に対して接近・離間させる可動子移動装置を含み、
前記エア供給装置が、前記可動子の前記固定子からの離間に伴って前記可動子用シリンダから流出させられるエアを前記可動子の対向面に供給する駆動源連動型供給部を含む請求項5に記載の検査装置。 - 当該検査装置が、前記一対の対向面が離間した状態で、これらの間を覆うカバー部を含む請求項1ないし6のいずれか1つに記載の検査装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/743,541 US10509069B2 (en) | 2015-07-15 | 2015-07-15 | Inspection device |
| JP2017528086A JP6684794B2 (ja) | 2015-07-15 | 2015-07-15 | 検査装置 |
| PCT/JP2015/070307 WO2017009986A1 (ja) | 2015-07-15 | 2015-07-15 | 検査装置 |
| CN201580081482.0A CN107736086B (zh) | 2015-07-15 | 2015-07-15 | 检查装置 |
| EP15898298.3A EP3324721B1 (en) | 2015-07-15 | 2015-07-15 | Inspection device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2015/070307 WO2017009986A1 (ja) | 2015-07-15 | 2015-07-15 | 検査装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017009986A1 true WO2017009986A1 (ja) | 2017-01-19 |
Family
ID=57758013
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/070307 WO2017009986A1 (ja) | 2015-07-15 | 2015-07-15 | 検査装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10509069B2 (ja) |
| EP (1) | EP3324721B1 (ja) |
| JP (1) | JP6684794B2 (ja) |
| CN (1) | CN107736086B (ja) |
| WO (1) | WO2017009986A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021073719A (ja) * | 2021-01-27 | 2021-05-13 | 株式会社Fuji | 測定装置、装着機 |
| JPWO2020017019A1 (ja) * | 2018-07-20 | 2021-07-15 | 株式会社Fuji | 測定装置 |
| US11483953B2 (en) | 2017-02-14 | 2022-10-25 | Fuji Corporation | Measurement device and measurement method |
| JP2022167994A (ja) * | 2018-10-15 | 2022-11-04 | パナソニックIpマネジメント株式会社 | 部品実装装置および部品実装方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61179600A (ja) * | 1985-01-30 | 1986-08-12 | 三菱電機株式会社 | 電子部品の装着装置 |
| JPH08250897A (ja) * | 1995-03-13 | 1996-09-27 | Advantest Corp | 電気的特性検査機能付きマウンタ及びその制御方法 |
| JPH0954134A (ja) * | 1995-08-12 | 1997-02-25 | Tdk Corp | 電子部品の特性測定方法及び装置 |
| JP2004077238A (ja) * | 2002-08-14 | 2004-03-11 | Murata Mfg Co Ltd | 電子部品の特性測定装置 |
| JP2005000725A (ja) * | 2003-06-09 | 2005-01-06 | Murata Mfg Co Ltd | 電子部品の選別装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5230703A (en) | 1975-09-04 | 1977-03-08 | Koichi Ogiso | Process and apparatus for treating molten metal by convection |
| DE3143941C2 (de) * | 1981-11-05 | 1983-09-15 | Deutsche Thomson-Brandt Gmbh, 7730 Villingen-Schwenningen | Vorrichtung für eine Bauteile-Bestückungsmaschine zur Zuführung von gepolten, elektronischen Bauteilen |
| US4721907A (en) * | 1985-01-23 | 1988-01-26 | Universal Instruments Corporation | Apparatus for automated testing of surface mounted components |
| JPS62114289A (ja) * | 1985-11-14 | 1987-05-26 | 松下電器産業株式会社 | 電子部品の装着方法および装置 |
| JPH0176100U (ja) | 1987-11-11 | 1989-05-23 | ||
| JPH05294437A (ja) * | 1992-04-21 | 1993-11-09 | Matsushita Electric Ind Co Ltd | パーツフィーダ |
| JP3339390B2 (ja) * | 1997-11-12 | 2002-10-28 | 株式会社村田製作所 | 電子部品の搬送装置 |
| SG98373A1 (en) * | 1998-11-25 | 2003-09-19 | Advantest Corp | Device testing apparatus |
| JP2008166663A (ja) * | 2007-01-05 | 2008-07-17 | Denso Corp | プリント基板保持装置および方法 |
| JP5918622B2 (ja) * | 2012-05-11 | 2016-05-18 | ヤマハ発動機株式会社 | 部品または基板の作業装置および部品実装装置 |
| JP5852505B2 (ja) * | 2012-05-14 | 2016-02-03 | ヤマハ発動機株式会社 | 部品または基板の作業装置および部品実装装置 |
| WO2014155657A1 (ja) | 2013-03-29 | 2014-10-02 | 富士機械製造株式会社 | 電子部品装着機および計測方法 |
| JP6272325B2 (ja) * | 2013-06-18 | 2018-01-31 | 富士機械製造株式会社 | 実装管理装置、実装処理装置、実装システム、実装管理方法及び実装処理方法 |
| EP3021654B1 (en) * | 2013-07-08 | 2019-04-03 | FUJI Corporation | Component holding state detection method and component mounting machine |
-
2015
- 2015-07-15 JP JP2017528086A patent/JP6684794B2/ja active Active
- 2015-07-15 EP EP15898298.3A patent/EP3324721B1/en active Active
- 2015-07-15 WO PCT/JP2015/070307 patent/WO2017009986A1/ja active Application Filing
- 2015-07-15 CN CN201580081482.0A patent/CN107736086B/zh active Active
- 2015-07-15 US US15/743,541 patent/US10509069B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61179600A (ja) * | 1985-01-30 | 1986-08-12 | 三菱電機株式会社 | 電子部品の装着装置 |
| JPH08250897A (ja) * | 1995-03-13 | 1996-09-27 | Advantest Corp | 電気的特性検査機能付きマウンタ及びその制御方法 |
| JPH0954134A (ja) * | 1995-08-12 | 1997-02-25 | Tdk Corp | 電子部品の特性測定方法及び装置 |
| JP2004077238A (ja) * | 2002-08-14 | 2004-03-11 | Murata Mfg Co Ltd | 電子部品の特性測定装置 |
| JP2005000725A (ja) * | 2003-06-09 | 2005-01-06 | Murata Mfg Co Ltd | 電子部品の選別装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3324721A4 * |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11483953B2 (en) | 2017-02-14 | 2022-10-25 | Fuji Corporation | Measurement device and measurement method |
| JPWO2020017019A1 (ja) * | 2018-07-20 | 2021-07-15 | 株式会社Fuji | 測定装置 |
| JP2022167994A (ja) * | 2018-10-15 | 2022-11-04 | パナソニックIpマネジメント株式会社 | 部品実装装置および部品実装方法 |
| JP7422294B2 (ja) | 2018-10-15 | 2024-01-26 | パナソニックIpマネジメント株式会社 | 部品実装装置および部品実装方法 |
| JP2021073719A (ja) * | 2021-01-27 | 2021-05-13 | 株式会社Fuji | 測定装置、装着機 |
| JP7101832B2 (ja) | 2021-01-27 | 2022-07-15 | 株式会社Fuji | 測定装置、装着機 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20180203057A1 (en) | 2018-07-19 |
| CN107736086A (zh) | 2018-02-23 |
| CN107736086B (zh) | 2020-05-01 |
| EP3324721A4 (en) | 2018-07-18 |
| JPWO2017009986A1 (ja) | 2018-04-19 |
| US10509069B2 (en) | 2019-12-17 |
| EP3324721B1 (en) | 2022-05-18 |
| JP6684794B2 (ja) | 2020-04-22 |
| EP3324721A1 (en) | 2018-05-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2017009987A1 (ja) | 検査装置 | |
| JP6607719B2 (ja) | 検査装置 | |
| WO2017009986A1 (ja) | 検査装置 | |
| JP7035256B2 (ja) | 装着機 | |
| CN107926155B (zh) | 检查装置 | |
| JP6568733B2 (ja) | 検査装置 | |
| WO2017056300A1 (ja) | 検査装置 | |
| JP7398177B2 (ja) | 電子部品装着機 | |
| JP6852127B2 (ja) | 検査装置および検査方法 | |
| JP7203273B2 (ja) | 装着機 | |
| JP7167265B2 (ja) | 検査装置 | |
| JP6908676B2 (ja) | 電気的特性取得方法および部品装着方法 | |
| JP7155445B2 (ja) | 装着機 | |
| JP7164924B2 (ja) | 電子部品装着機および検査方法 | |
| JP7013617B2 (ja) | 装着機 | |
| JP2023024733A (ja) | 装着機 | |
| WO2017056301A1 (ja) | 検査装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15898298 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2017528086 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15743541 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2015898298 Country of ref document: EP |