WO2016002131A1 - Portable device and position detection system - Google Patents
Portable device and position detection system Download PDFInfo
- Publication number
- WO2016002131A1 WO2016002131A1 PCT/JP2015/002720 JP2015002720W WO2016002131A1 WO 2016002131 A1 WO2016002131 A1 WO 2016002131A1 JP 2015002720 W JP2015002720 W JP 2015002720W WO 2016002131 A1 WO2016002131 A1 WO 2016002131A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- vehicle
- portable device
- state
- determination unit
- determination
- Prior art date
Links
- 238000001514 detection method Methods 0.000 title claims abstract description 23
- 238000004891 communication Methods 0.000 claims abstract description 57
- 230000001133 acceleration Effects 0.000 claims abstract description 34
- 238000012545 processing Methods 0.000 claims description 36
- 230000005540 biological transmission Effects 0.000 claims description 32
- 230000008859 change Effects 0.000 claims description 24
- 230000033001 locomotion Effects 0.000 claims description 13
- 238000005259 measurement Methods 0.000 claims description 13
- 230000007704 transition Effects 0.000 claims description 13
- 238000000034 method Methods 0.000 description 37
- 230000008569 process Effects 0.000 description 33
- 230000000694 effects Effects 0.000 description 9
- 238000012795 verification Methods 0.000 description 6
- 238000010586 diagram Methods 0.000 description 3
- 230000002238 attenuated effect Effects 0.000 description 2
- 230000003213 activating effect Effects 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 230000004397 blinking Effects 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000001902 propagating effect Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R25/00—Fittings or systems for preventing or indicating unauthorised use or theft of vehicles
- B60R25/20—Means to switch the anti-theft system on or off
- B60R25/24—Means to switch the anti-theft system on or off using electronic identifiers containing a code not memorised by the user
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05B—LOCKS; ACCESSORIES THEREFOR; HANDCUFFS
- E05B49/00—Electric permutation locks; Circuits therefor ; Mechanical aspects of electronic locks; Mechanical keys therefor
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B21/00—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S11/00—Systems for determining distance or velocity not using reflection or reradiation
- G01S11/02—Systems for determining distance or velocity not using reflection or reradiation using radio waves
- G01S11/06—Systems for determining distance or velocity not using reflection or reradiation using radio waves using intensity measurements
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B21/00—Alarms responsive to a single specified undesired or abnormal condition and not otherwise provided for
Definitions
- the present disclosure relates to a technique for determining the position of a mobile device with respect to a vehicle based on signal strength of wireless communication.
- a technique is known in which a mobile device represented by a mobile phone or the like detects the position of the mobile device based on the signal strength of a radio signal from a base station (so-called RSSI (Received Signal Signal Strength Indicator)) (for example, Patent Document 1).
- RSSI Received Signal Signal Strength Indicator
- Patent Document 1 it is utilized that radio waves are attenuated according to the distance when propagating in the air, and the distance between the base station and the portable device is measured based on the signal strength of the radio signal. The position of is detected.
- the above technique can also be used to determine the position of the portable device with respect to the vehicle. That is, when the portable device and the in-vehicle device mounted on the vehicle perform wireless communication, and the user of the portable device forgets to lock the door or close the window when getting off the vehicle, the portable device can carry it from the in-vehicle device. That is notified to the device and the portable device is notified. This type of notification is preferably performed at a timing when the user completes the getting-off operation from the vehicle and leaves the vehicle.
- the timing at which the portable device leaves the vehicle in other words, the timing at which the portable device exits from a predetermined area (determination area) around the vehicle. To detect.
- the portable device determines that the RSSI value has fallen below a predetermined threshold value. It can be determined that the vehicle has left the area.
- the signal strength of the radio signal is easily affected by the shield.
- a portable device in which the threshold value of the RSSI value is located on the boundary between the determination area and the outside when there is no shielding object such as a user's body (human body) between the in-vehicle device and the portable device It is assumed that the RSSI value ⁇ of the radio signal transmitted from is set.
- the radio wave radiated from the portable device is attenuated by the human body and reaches the in-vehicle device.
- the RSSI value measured by the in-vehicle device may fall below the threshold value ⁇ .
- This disclosure is intended to provide a technique for suppressing erroneous determination that a mobile device has moved out of the determination area even though the mobile device is present in the determination area.
- the mobile device performs wireless communication with the in-vehicle device mounted on the vehicle, and includes an acquisition unit, a first measurement unit, and a first determination unit.
- the acquisition unit acquires the signal strength of wireless communication with the in-vehicle device.
- the first measurement unit measures the acceleration of the portable device.
- the first determination unit determines whether or not the portable device is present in a determination area around the vehicle based on the signal intensity acquired by the acquisition unit and the acceleration measured by the first measurement unit. To do.
- the first determination unit estimates the distance between the portable device and the vehicle based on the acceleration, the distance is equal to or greater than the first threshold value, and the signal strength is equal to or less than the second threshold value. In some cases, it is determined that the portable device does not exist within the determination area.
- the position detection system includes an in-vehicle device mounted on a vehicle and a portable device that performs wireless communication with the in-vehicle device.
- the portable device includes an acquisition unit, a first measurement unit, and a first determination unit.
- the acquisition unit acquires the signal strength of wireless communication with the in-vehicle device.
- the first measurement unit measures the acceleration of the portable device.
- the first determination unit determines whether or not the portable device is present in a determination area around the vehicle based on the signal intensity acquired by the acquisition unit and the acceleration measured by the first measurement unit. To do.
- the first determination unit estimates the distance between the portable device and the vehicle based on the acceleration, the distance is equal to or greater than the first threshold value, and the signal strength is equal to or less than the second threshold value. In some cases, it is determined that the portable device does not exist within the determination area.
- the portable device and the position detection system even if the portable device exists in the determination area, even if the signal strength is equal to or lower than the second threshold value, the distance estimated based on the acceleration is the first If it is not greater than or equal to the threshold value, it is possible to suppress erroneous determination that the mobile device has gone out of the determination area. Therefore, it is possible to suppress variations between the timing at which the mobile device is determined to have moved out of the determination area from the determination area and the timing at which the mobile device has actually moved out of the determination area.
- FIG. 1 is a block diagram illustrating configurations of a vehicle and a portable device in the first embodiment.
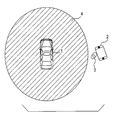
- FIG. 2 is a diagram showing a determination area around the vehicle
- FIG. 3 is a flowchart showing the information transmission process of the first embodiment.
- FIG. 4 is a flowchart showing the vehicle information notification process of the first embodiment.
- FIG. 5 is a flowchart showing the determination logic of the first embodiment.
- FIG. 6 is a block diagram showing the configuration of the vehicle and the portable device in the second embodiment.
- FIG. 7 is a flowchart showing the determination logic of the second embodiment.
- FIG. 8 is a flowchart showing the vehicle information notification process of the third embodiment.
- FIG. 9 is a flowchart showing the information transmission process of the third embodiment.
- the vehicle 1 of the first embodiment includes a door lock sensor 101, a door opening / closing sensor 102, a window opening / closing sensor 103, a headlight switch 104, a small light switch 105, a hazard lamp switch 106, an ignition switch 107, A door lock actuator 108, a body ECU 11, a smart key communication unit 12, a verification ECU 13, an in-vehicle device 15, and an antenna (also referred to as a vehicle antenna) 16 are provided.
- the body ECU 11, the verification ECU 13, and the in-vehicle device 15 are connected to a common bus 14, and these perform mutual communication according to, for example, a CAN (Controller Area Network) protocol.
- CAN Controller Area Network
- the door lock sensor 101 and the door opening / closing sensor 102 are provided on each of the doors provided in the vehicle 1 (in this embodiment, a driver seat door, a passenger seat door, a rear seat door, and a back door).
- the door lock sensor 101 detects the unlocked state of each door.
- the door open / close sensor 102 detects the open / closed state of each door.
- the window opening / closing sensor 103 is provided in the driver's seat door, the passenger seat door, and the rear seat door, and detects the opening / closing state of the window provided in each door.
- the headlight switch 104 controls the operation (lighting and extinguishing) of the headlight provided in the vehicle 1.
- the small light switch 105 controls the operation (lighting and extinguishing) of the small light provided in the vehicle 1.
- the hazard lamp switch 106 controls the operation (flashing and extinguishing) of the hazard lamp provided in the vehicle 1.
- the ignition switch 107 controls the operation (on and off) of the ignition provided in the vehicle 1.
- the body ECU 11 includes a known microcomputer centered on a CPU, a ROM, and a RAM, and acquires information detected by various sensor switches 101 to 107.
- the ECU means an electronic control device.
- the door lock actuator 108 is provided in each of the driver door, the passenger door, the rear seat door, and the back door, and locks and unlocks each door based on an instruction from the body ECU 11.
- the smart key communication unit 12 periodically transmits a polling signal into the vehicle 1 and receives an ID code wirelessly transmitted as a return signal from the mobile key (smart key) that has received the polling signal.
- the verification ECU 13 includes a well-known microcomputer centered on a CPU, ROM, and RAM, and acquires an ID code from the smart key communication unit 12.
- the verification ECU 13 detects a state in which the ID code is received by the smart key communication unit 12 as a state in which the smart key exists in the vehicle 1.
- the in-vehicle device 15 includes a communication unit (corresponding to a communication unit of the in-vehicle device) 151 and a control unit 152.
- the communication unit 151 includes a BT communication function for performing wireless communication using Bluetooth (registered trademark, hereinafter referred to as BT), which is one of the short-range wireless communication standards, and the portable device 2 having the BT communication function and the antenna 16. Wireless communication is performed via Examples of the mobile device 2 having the BT communication function include a mobile phone and a smartphone. In addition, the communication unit 151 measures the signal strength value (RSSI value) of the radio signal transmitted from the mobile device 2.
- RSSI value signal strength value
- the control unit 152 includes a known microcomputer centered on a CPU, ROM, and RAM, and acquires an RSSI value from the communication unit 151.
- the control unit 152 receives information representing the unlocked state of each door of the vehicle 1, information representing the opened / closed state of each door of the vehicle 1, information representing the opened / closed state of each window of the vehicle 1, and the vehicle Information indicating the lighting / extinguishing state of one headlight and small light is acquired.
- the control unit 152 acquires information representing the blinking / unlit state of the hazard lamp of the vehicle 1 and information representing the on / off state of the ignition switch 107 of the vehicle 1 from the body ECU 11.
- control unit 152 acquires information on whether or not the smart key exists in the vehicle 1 from the verification ECU 13.
- vehicle information acquired by the control unit 152 from the body ECU 11 and the verification ECU 13 is collectively referred to as “vehicle information”.
- control unit 152 periodically transmits the RSSI value and the vehicle information to the portable device 2 via the communication unit 151 by executing an information transmission process (FIG. 3) described later.
- the portable device 2 of the first embodiment includes an acceleration sensor 21, a communication unit (also referred to as a communication unit of a portable device) 22, an antenna (antenna of the portable device) 23, a display unit 24, and A control unit 25 is provided.
- a communication unit also referred to as a communication unit of a portable device
- an antenna antenna of the portable device
- a control unit 25 is provided.
- the acceleration sensor 21 measures the acceleration of the mobile device 2. For example, when a user 3 (see FIG. 2) such as a driver walks with the portable device 2, the portable device 2 vibrates with the movement of the user 3, and the acceleration due to the vibration is measured by the acceleration sensor 21.
- a user 3 see FIG. 2
- the portable device 2 vibrates with the movement of the user 3, and the acceleration due to the vibration is measured by the acceleration sensor 21.
- the communication unit 22 has a BT communication function, and performs wireless communication with the in-vehicle device 15 via the antenna 23.
- the display unit 24 includes a display screen and displays an image (including characters) according to an instruction from the control unit 25.
- the control unit 25 includes a known microcomputer centered on a CPU, ROM, and RAM.
- the control unit 25 acquires acceleration from the acceleration sensor 21 and acquires the RSSI value and vehicle information transmitted from the in-vehicle device 15 via the communication unit 22. Moreover, the control part 25 performs the vehicle information alerting
- the information transmission process is executed by executing the vehicle information notification process (FIG. 4). That is, when the vehicle information notification process is started, a wireless communication link is established between the portable device 2 and the in-vehicle device 15, and the information transmission process is started after the link is established.
- control unit 152 determines whether or not there is a link loss (link disconnection associated with a radio wave environment change or the like) in S101. When determining that there is a link loss (S101: YES), the control unit 152 ends the information transmission process.
- a link loss link disconnection associated with a radio wave environment change or the like
- the control part 152 acquires an RSSI value from the communication part 151, and acquires vehicle information from various ECU of body ECU11 and collation ECU13 (S102). . And the control part 152 transmits the acquired RSSI value and vehicle information to the portable apparatus 2 via the communication part 151 (S103).
- the control unit 152 determines whether or not there is a link loss in S104. If it is determined that there is a link loss (S104: YES), the information transmission process is terminated. When determining that there is no link loss (S104: NO), the control unit 152 determines whether the communication unit 151 has received a link disconnection command transmitted from the portable device 2 (S105).
- the link disconnection command here is information transmitted from the mobile device 2 and is information indicating that the link is to be disconnected, and the control unit 25 of the mobile device 2 executes vehicle information notification processing (FIG. 4) described later. To be transmitted.
- control unit 152 determines that the communication unit 151 has received the link disconnection command (S105: YES), the control unit 152 disconnects the link (S106) and ends the information transmission process.
- the control unit 152 determines that the communication unit 151 has not received the link disconnection command (S105: NO), the control unit 152 returns to S102 and repeats the processing after S102 described above. Therefore, unless the link loss occurs and the communication unit 151 does not receive the link disconnection command, the RSSI value and the vehicle information are periodically transmitted from the in-vehicle device 15 to the portable device 2.
- the vehicle information notification process is started when a dedicated application is activated in the mobile device 2.
- the application is assumed to be started before the user 3 gets on the vehicle 1 and before getting off.
- the control unit 25 constantly counts the integrated value of the movement amount of the user 3 (the number of steps moved by the user 3) based on the acceleration acquired from the acceleration sensor 21.
- the control unit 25 sets the notification flag to 0 (S201).
- the notification flag is a flag indicating whether notification (S208) described later is performed.
- a notification flag of 1 indicates that notification is being performed, and a notification flag of 0 indicates that notification is not being performed.
- control unit 25 determines whether or not there is a link loss (S202). When it is determined that there is no link loss (S202: NO), the RSSI value and vehicle information transmitted from the in-vehicle device 15 are determined. Obtained via the communication unit 22 (S203).
- the control unit 25 determines whether or not there is a link loss (S204). When it is determined that there is no link loss (S204: NO), the control unit 25 determines that the mobile device 2 (and hence the user 3) is centered on the vehicle 1 based on a determination logic (FIG. 5) described later. It is determined whether or not it exists in area 4 (see FIG. 2) (S205).
- control unit 25 determines in S205 that the mobile device 2 is present in the determination area 4 (S205: YES)
- the control unit 25 returns to S203 and repeats the above-described processing after S203.
- the control unit 25 determines that the mobile device 2 does not exist in the determination area 4 (that is, determines that the mobile device 2 does not exist in the determination area 4), that is, the user 3 Is determined to have gone out of the determination area 4 from within the determination area 4 (S205: NO), it is determined whether there is a notification factor (S206).
- the notification factor here means that an operation to be performed when the occupant gets out of the vehicle 1 is forgotten, for example, “forgotten” such as forgetting to lock the door or forgetting to close the door.
- the determination as to whether or not there is a notification factor is performed based on the vehicle information acquired in S203.
- control unit 25 when it is determined that there is a link loss in S202 (S202: YES), the control unit 25 skips the processes of S203 to S205 and performs the process of S206. Similarly, when it is determined that there is a link loss in S204 (S204: YES), the control unit 25 skips the process of S205 and performs the process of S206. Therefore, the control unit 25 performs the processing from S206 onward even when a link loss occurs when the mobile device 2 is present in the determination area 4.
- the control unit 25 determines whether or not the notification flag is 1 (S207). When the control unit 25 determines that the notification flag is not 1 (S207: NO), the control unit 25 performs notification by displaying that there is a notification factor on the display unit 24 (S208).
- the determination area 4 is an area for determining the timing at which the “forgetting to perform” notification, in other words, the timing at which the user 3 gets off the vehicle 1 and leaves the vehicle 1. The notification continues to be executed until the notification is canceled in S212 described later.
- the control part 25 sets a notification flag to 1 after a notification start (S209).
- control unit 25 determines whether or not there is a link loss (S210). If it is determined that there is a link loss (S210: YES), the vehicle information notification process is terminated.
- control unit 25 returns to S203 and repeats the processing from S203 described above.
- control part 25 determines with there being an alerting
- the control unit 25 determines whether the notification flag is 1, that is, whether notification is being performed (S211). ).
- the case where there is no notification factor includes the case where there is no notification factor from the beginning and the case where the notification factor is removed after the start of notification.
- the control unit 25 cancels the notification (S212), and the notification flag Is set to 0 (S213). And the control part 25 cut
- control unit 25 skips the processing of S212 to S213 and performs the processing of S214. After having performed, a vehicle information alerting
- the control unit 25 determines whether or not the ignition switch 107 of the vehicle 1 is OFF based on information indicating ON / OFF of the ignition switch 107 included in the vehicle information acquired in S203 (S301). When the control unit 25 determines that the ignition switch 107 is not off (that is, is on) (S301: NO), the control unit 25 determines that the portable device 2 (and thus the user 3) exists in the determination area 4.
- the control unit 25 determines whether the count reset condition is satisfied (S302).
- the control part 25 is based on the opening / closing information showing the opening / closing state of each door (a driver's seat door, a passenger seat door, a rear seat door, and a back door) of the vehicle 1 included in the vehicle information acquired in S203. If it is determined that the door has been opened or closed, it is determined that the count reset condition is satisfied.
- the term “open / close” as used herein includes both a change from the closed state to the open state and a change from the open state to the closed state.
- the opening / closing information indicating the open state of the driver's seat door is acquired after the opening / closing information indicating the closed state of the driver's seat door is acquired, it is determined that the driver's seat door is opened and closed, and the count reset condition is satisfied. It is determined that
- the control unit 25 When it is determined that the count reset condition is satisfied in S302 (S302: YES), the control unit 25 resets the integrated value of the movement amount of the user 3 (the number of steps moved by the user 3) (S303). Since the count reset condition is satisfied at least when the user 3 performs a predetermined operation that triggers the getting off (that is, when the user 3 opens and closes the door when getting off the vehicle 1), the number of steps is At least when the user 3 gets off the vehicle.
- the control unit 25 determines whether or not the number of steps counted since the last reset (that is, the current count value) is greater than or equal to a predetermined threshold value Th1 (S304).
- the threshold value Th1 is set, for example, based on the minimum number of steps necessary to get out of the determination area 4 after getting off the vehicle. If the control unit 25 determines in S302 that the count reset condition is not satisfied (S302: NO), it skips the process of S303 and executes the process of S304.
- step S304 determines in step S304 that the number of steps is equal to or greater than the threshold value Th1 (S304: YES), whether or not the latest RSSI value acquired in step S203 is equal to or less than the predetermined threshold value Th2. Is determined (S305).
- the threshold value Th ⁇ b> 2 is, for example, the portable device 2 located on the boundary between the determination area 4 and the outside when there is no shielding object such as the body of the user 3 between the in-vehicle device 15 and the portable device 2. Is set with reference to the RSSI value of the radio signal transmitted from.
- the control unit 25 determines that the mobile device 2 is outside the determination area 4 and ends the determination logic of FIG. .
- control unit 25 determines in S304 that the number of steps is not equal to or greater than the threshold value Th1 (S304: NO), or when it is determined in S305 that the RSSI value is not equal to or less than the threshold value Th2 (S305: NO).
- the portable device 2 determines that it exists in the determination area 4, and ends the determination logic of FIG.
- the mobile device 2 of the first embodiment performs wireless communication with the in-vehicle device 15 mounted on the vehicle 1, so that the mobile device 2 (and thus the user 3) can move from the determination area 4 to the outside of the determination area 4. It is determined whether or not.
- the state of the vehicle 1 is based on the vehicle information transmitted from the in-vehicle device 15, and the state of the vehicle 1 is forgotten to lock the door or the window. It is determined whether or not there is no “forgetting” (notification factor) such as forgetting to close.
- the RSSI value measured by the in-vehicle device 15 may be equal to or less than the threshold value Th2 even when the portable device 2 exists in the determination area 4 due to a shield such as a human body.
- the mobile device 2 determines whether or not the mobile device 2 has moved out of the determination area 4 based on only the RSSI value, the mobile device 2 actually exists in the determination area 4. Nevertheless, an erroneous determination that the portable device 2 has gone out of the determination area 4 is performed. Therefore, the variation of the notified timing (degree of separation from the vehicle) becomes large.
- the mobile device 2 of the first embodiment moves the mobile device 2 out of the determination area 4 based on the acceleration of the mobile device 2 (and thus the number of steps counted based on the acceleration) in addition to the RSSI value. Judgment is made as to whether or not it has come out.
- the portable device 2 assumes that the portable device 2 has gone outside the determination area 4 if the number of steps is not equal to or greater than the threshold value Th1 Can be suppressed.
- determination accuracy the timing at which the mobile device 2 is determined to have moved out of the determination area 4 from within the determination area 4 and the timing at which the mobile device 2 has actually moved out of the determination area 4 is suppressed (determination accuracy). Can be increased).
- the portable device 2 determines that one of the doors of the vehicle 1 is opened or closed based on the opening / closing information indicating the opened / closed state of each door of the vehicle 1 transmitted from the in-vehicle device 15, the portable device 2 calculates the counted number of steps. Reset. Therefore, for example, even when the user 3 leaves the vehicle 1 after opening and closing the back door and unloading the baggage from the rear of the vehicle 1 after getting off, the number of steps taken until the user 1 goes to the rear of the vehicle 1 Is reset, and only the number of steps of movement leaving the vehicle 1 can be counted.
- a system including the in-vehicle device 15 and the portable device 2 corresponds to an example of a position detection system.
- S203 corresponds to an example of processing as an acquisition unit
- the acceleration sensor 21 corresponds to an example of a first measurement unit.
- S205 corresponds to an example of processing as the first determination unit.
- opening and closing the door of the vehicle 1 corresponds to an example of a predetermined operation that triggers getting off
- a series of opening and closing information transmitted from the in-vehicle device corresponds to an example of operation information.
- S206 corresponds to an example of processing as the second determination unit and the third determination unit.
- the vehicle information corresponds to an example of state information
- a state without a notification factor corresponds to an example of a predetermined state that should be realized when no occupant is present.
- the case where no occupant is present can also be called the case where no occupant is present.
- S208 corresponds to an example of processing as the first notification unit
- S212 corresponds to an example of processing as the second notification unit.
- S103 corresponds to an example of processing as an operation information transmission unit, an opening / closing information transmission unit, a signal intensity transmission unit, and a state information transmission unit
- the communication unit 151 corresponds to an example of a third measurement unit.
- the configuration of the vehicle 1 of the second embodiment is the same as that of the first embodiment.
- the mobile device 5 of the second embodiment includes an acceleration sensor 21, a communication unit 22, an antenna 23, a display unit 24, a gyro sensor 51, and a control unit 52, as shown in FIG. That is, the mobile device 5 of the second embodiment is different from the mobile device 2 of the first embodiment in that it further includes a gyro sensor 51.
- the control unit 52 of the second embodiment has the same hardware configuration as the control unit 25 of the first embodiment, but the vehicle information notification process to be executed is different from that of the control unit 25.
- the gyro sensor 51 measures the angular velocity of the portable device 5. For example, when the user 3 walks with the portable device 5 carried, the angular velocity of the portable device 5 may change with the movement of the user 3. The angular velocity that can change in this way is measured by the gyro sensor 51.
- the control unit 52 has a function of acquiring an angular velocity from the gyro sensor 51 in addition to the same function as the control unit 25 of the first embodiment. Moreover, the control part 52 measures the angle change of the portable apparatus 5 per relatively short predetermined time (for example, 100 ms) by integrating the acquired angular velocity. The controller 52 executes a vehicle information notification process described later based on the acceleration, the RSSI value, the vehicle information, and the angle change.
- vehicle information notification processing executed by the control unit 52 of the portable device 5 will be described.
- the vehicle information notification process executed by the controller 52 is the same except for the vehicle information notification process (FIG. 4) of the first embodiment and the determination logic (S205). Therefore, only the determination logic of the second embodiment will be described below with reference to FIG.
- the control unit 52 determines whether or not the latest measured angle change is equal to or less than the threshold value Th3 (S405). ). For example, when the user 3 who carries the portable device 5 is moving in a different direction, in other words, the threshold value Th3 is set based on an angle change that can be taken when the user 3 is not moving straight.
- the control unit 52 determines whether the RSSI value is equal to or less than the threshold value Th2 (S406). When the control unit 52 determines that the RSSI value is equal to or less than the threshold value Th2 (S406: YES), the control unit 52 determines that the portable device 5 exists outside the determination area 4, and ends the determination logic of FIG. .
- the control unit 52 determines that the number of steps is not equal to or greater than the threshold value Th1 (S404: NO), or determines that the angle change is not equal to or less than the threshold value Th3 (S405: NO), the mobile device 5 Determines that it exists in the determination area 4 and ends the determination logic of FIG.
- the control unit 52 determines that the RSSI value is not equal to or less than the threshold value Th2 (S406: NO)
- the control unit 52 determines that the portable device 5 exists in the determination area 4, and ends the determination logic of FIG. .
- the mobile device 5 of the second embodiment determines whether or not the mobile device 5 has moved out of the determination area 4 from the determination area 4 based on the angle change of the mobile device 5 in addition to the RSSI value and the number of steps. Do.
- the number of steps is added if the user 3 is walking even if the user 3 does not leave the vehicle 1. For this reason, after the user 3 gets off the vehicle, instead of walking straight out of the determination area 4 and walking around the vehicle, the number of steps in the determination area 4 may exceed the threshold Th1. is there.
- the RSSI value becomes equal to or less than the threshold value Th2 due to a shield such as a human body, the number of steps becomes equal to or more than the threshold value Th1 even though the mobile device 5 exists in the determination area 4, and the RSSI value Falls below the threshold Th2.
- the portable device 5 of the second embodiment is not portable when the change in angle is not equal to or less than the threshold value Th3 (that is, when the user 3 frequently changes the direction of travel). It is determined that the device 5 exists in the determination area 4. Therefore, the mobile device 5 can suppress erroneous determination that the mobile device 5 has gone out of the determination area 4 if the angle change is not equal to or less than the threshold Th3 even in the above case. .
- the configuration in the second embodiment that is common to the first embodiment corresponds to the configuration in the first embodiment.
- the system provided with the vehicle-mounted apparatus 15 and the portable apparatus 5 is equivalent to an example of a position detection system
- the gyro sensor 51 and the control part 52 are equivalent to an example of a 2nd measurement part.
- the hardware configuration of the third embodiment is the same as that of the first embodiment. That is, the hardware configuration of the vehicle 1 of the third embodiment and the hardware configuration of the portable device 2 are the same as those of the first embodiment. However, the vehicle information transmission process and the information transmission process executed in the third embodiment are different from those in the first embodiment. Therefore, only the vehicle information transmission process and the information transmission process of the third embodiment will be described below.
- control unit 25 determines whether there is forgetting to lock the door among the notification factors (S515).
- the control unit 25 transmits a locking command for locking the door to the in-vehicle device 15 via the communication unit 22 (S516). . After transmitting the locking command or when determining in S515 that the door is not forgotten to be locked (S515: NO), the control unit 25 returns to S503 and repeats the processing after S503.
- the control unit 152 determines whether the communication unit 151 has received a locking command (S607). When it is determined that the communication unit 151 has received the locking command (S607: YES), the control unit 152 causes the door lock actuator 108 to lock the door that is not locked (S608). If the door is locked in S608, the control unit 152 returns to S602 and repeats the processing from S602 onward.
- control unit 152 determines in S607 that the communication unit 151 has not received the locking command (S607: NO), the control unit 152 executes the process of S605.
- the mobile device 2 when there is a notification factor, can automatically shift the vehicle 1 to a state where the notification factor is removed, that is, a state where "forgetting to do" is eliminated. Determine. Note that the above determination corresponds to the determination (S515) as to whether or not the door lock is forgotten. In addition, when the portable device 2 determines that the vehicle 1 can automatically transition to the state where the notification factor is removed, that is, when it is determined that the door lock is forgotten, the notification factor is removed. Transition command information (locking command) for instructing the transition to the state is wirelessly transmitted to the vehicle 1.
- the configuration in the third embodiment that is common to the first embodiment corresponds to the configuration in the first embodiment.
- S503 corresponds to an example of processing as an acquisition unit
- S505 corresponds to an example of processing as a first determination unit
- S506 corresponds to an example of processing as the second determination unit and the third determination unit
- S508 corresponds to an example of processing as the first notification unit.
- S512 corresponds to an example of processing as a second notification unit
- S603 corresponds to an example of processing as an operation information transmission unit, an opening / closing information transmission unit, a signal strength transmission unit, and a state information transmission unit.
- S515 corresponds to an example of processing as a fourth determination unit
- S516 corresponds to an example of processing as a transition command transmission unit
- S608 corresponds to an example of processing as a transition processing unit.
- the vehicle-mounted apparatus 15 when the control parts 25 and 52 acquire the signal strength of the radio
- the signal strength may be measured directly by the portable devices 2 and 5.
- the communication unit 22 may measure the signal strength, and the control units 25 and 52 may acquire the signal strength from the communication unit 22.
- reporting process which the portable apparatuses 2 and 5 perform was started by starting a dedicated application in the portable apparatuses 2 and 5, the said application is operating in the background. Also good. Further, the application may be activated without the user 3 performing an activation operation for activating the application. For example, it may be started by starting the operating system of the mobile devices 2 and 5.
- the distance between the portable apparatuses 2 and 5 and the vehicle 1 based on the acceleration of the portable apparatuses 2 and 5 the number of steps of the user 3 was used.
- the distance may be estimated using an amount based on the amount other than the number of steps.
- movement used as the opportunity of the user 3 getting off was an operation
- movement is
- the present invention is not limited to this.
- the predetermined operation may be an operation in which the user 3 stands on the driver's seat when getting off the vehicle.
- the driver's seat may be provided with a seating sensor, and the motion of standing up the driver's seat may be detected by the seating sensor.
- the instantaneous value of the angle change (the latest measured angle change) is used, but the integrated value of the angle change may be used.
- the integrated value of the angle change for example, an integrated value after the user 3 gets off the vehicle 1 can be considered.
- the modification of the determination logic (FIG. 7) according to the second embodiment is, for example, determination logic having a requirement that the threshold value Th1 of the number of steps changes according to an angle change or the number of steps counted according to the angle change. It may be a determination logic having a requirement that is reduced or reset.
- the determination (S515) of whether there is forgetting to lock a door among notification factors was performed by the portable apparatus 2 side, the said determination is performed by the vehicle 1 side. Also good. That is, when the control unit 152 performs the above determination and determines that the door lock is forgotten, the door lock actuator 108 may be locked. In this case, when there is a notification factor other than forgetting to lock the door, the control unit 152 wirelessly transmits information to the effect that there is a notification factor to the portable device 2 via the communication unit 151.
- the notification factor that can be automatically removed on the vehicle 1 side is forgotten to lock the door, but the notification factor is not limited to this.
- forgetting to close the window may be automatically removed.
- the vehicle 1 when there is a notification factor that can be automatically removed on the vehicle 1 side in the notification factor, the vehicle 1 may be caused to remove the notification factor. That is, in 2nd Embodiment, the information transmission process of FIG. 3 which the control part 152 of the vehicle-mounted apparatus 15 performs is changed into the information transmission process of FIG. 9, and the vehicle information alerting
- the portable apparatuses 2 and 5 cancel
- the user 3 was notified that it became.
- the portable devices 2 and 5 indicate to the user 3 that the vehicle 1 is in a state where there is no notification factor, for example, by displaying on the display unit 24 as an image such as a character that the notification factor has been eliminated. You may notify.
- the functions of one component in the above embodiment may be distributed as a plurality of components, or the functions of a plurality of components may be integrated into one component. Further, at least a part of the configuration of the above embodiment may be replaced with a known configuration having the same function. Moreover, you may abbreviate
- each step is expressed as S101, for example. Further, each step can be divided into a plurality of sub-steps, while a plurality of steps can be combined into one step.
- embodiments, configurations, and aspects of the portable device and the position detection system have been illustrated, but the embodiments, configurations, and aspects are not limited to the above-described embodiments, configurations, and aspects.
- embodiments, configurations, and aspects obtained by appropriately combining technical units disclosed in different embodiments, configurations, and aspects are also included in the scope of the embodiments, configurations, and aspects related to the portable device and the position detection system. .
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Business, Economics & Management (AREA)
- Emergency Management (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Lock And Its Accessories (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
- Emergency Alarm Devices (AREA)
Abstract
A portable device (2, 5) performs wireless communication with an in-vehicle device (15), and is provided with: an acquisition unit (S203, S503) that acquires signal intensity of the wireless communication; a first measuring unit (21) that measures acceleration of the portable device; and a first determining unit (S205, S505) that determines whether the portable device is in a determination area (4) around a vehicle. The first determining unit estimates a distance between the portable device and the vehicle, and determines that the portable device is not in the determination area in the cases where the distance is equal to or more than a first threshold value, and signal intensity is equal to or lower than a second threshold value. A position detection system is provided with the in-vehicle device (15) and the portable device (2, 5). The portable device is provided with the acquisition unit (S203, S503), the first measuring unit (21), and the first determining unit (S205, S505).
Description
本出願は、2014年7月3日に出願された日本国特許出願2014-138074号に基づくものであり、ここにその記載内容を参照により援用する。
This application is based on Japanese Patent Application No. 2014-138074 filed on July 3, 2014, the contents of which are incorporated herein by reference.
本開示は、車両に対する携帯装置の位置を無線通信の信号強度に基づき判定する技術に関する。
The present disclosure relates to a technique for determining the position of a mobile device with respect to a vehicle based on signal strength of wireless communication.
携帯電話等に代表される携帯装置が基地局からの無線信号の信号強度(いわゆる、RSSI(Received Signal Strength Indicator))に基づいて当該携帯装置の位置を検出する技術が知られている(例えば、特許文献1参照)。この技術では、電波が空中を伝搬される際に距離に応じて減衰することが利用され、無線信号の信号強度に基づき、基地局と携帯装置との間の距離を測定することで、携帯装置の位置が検出される。
A technique is known in which a mobile device represented by a mobile phone or the like detects the position of the mobile device based on the signal strength of a radio signal from a base station (so-called RSSI (Received Signal Signal Strength Indicator)) (for example, Patent Document 1). In this technology, it is utilized that radio waves are attenuated according to the distance when propagating in the air, and the distance between the base station and the portable device is measured based on the signal strength of the radio signal. The position of is detected.
本願発明者は、下記を見出した。
The inventors of the present application found the following.
上記の技術は、車両に対する携帯装置の位置を判定することにも利用することができる。すなわち、携帯装置と車両に搭載された車載装置とが無線通信を行い、携帯装置の使用者が、車両を降りる際にドアロックをし忘れたり窓を閉め忘れたりした場合に、車載装置から携帯装置へその旨を通知して携帯装置に報知させる。この種の報知は、使用者が車両からの降車動作を完了させて車両から離れたタイミングで行うのが望ましい。そこで、車載装置と携帯装置との間の無線信号の信号強度に基づき、携帯装置が車両から離れたタイミング、換言すれば、車両周辺の所定のエリア(判定エリア)から携帯装置が出たタイミングを検出する。
The above technique can also be used to determine the position of the portable device with respect to the vehicle. That is, when the portable device and the in-vehicle device mounted on the vehicle perform wireless communication, and the user of the portable device forgets to lock the door or close the window when getting off the vehicle, the portable device can carry it from the in-vehicle device. That is notified to the device and the portable device is notified. This type of notification is preferably performed at a timing when the user completes the getting-off operation from the vehicle and leaves the vehicle. Therefore, based on the signal strength of the radio signal between the in-vehicle device and the portable device, the timing at which the portable device leaves the vehicle, in other words, the timing at which the portable device exits from a predetermined area (determination area) around the vehicle. To detect.
具体的には、例えば、車載装置が携帯装置から送信された無線信号のRSSIの値(RSSI値)を測定する場合において、RSSI値が所定のしきい値を下回ったことをもって、携帯装置が判定エリアから出たと判定することができる。
Specifically, for example, when the in-vehicle device measures the RSSI value (RSSI value) of the radio signal transmitted from the portable device, the portable device determines that the RSSI value has fallen below a predetermined threshold value. It can be determined that the vehicle has left the area.
しかしながら、無線信号の信号強度は、遮蔽物の影響を受けやすい。例えば、RSSI値のしきい値が、車載装置と携帯装置との間に使用者の体(人体)等の遮蔽物がない場合での、判定エリアの中と外の境目上に位置する携帯装置から送信された無線信号のRSSI値αに設定されたとする。
However, the signal strength of the radio signal is easily affected by the shield. For example, a portable device in which the threshold value of the RSSI value is located on the boundary between the determination area and the outside when there is no shielding object such as a user's body (human body) between the in-vehicle device and the portable device It is assumed that the RSSI value α of the radio signal transmitted from is set.
もし、使用者の体が車載装置と携帯装置との間にあると、携帯装置から放射された電波は人体により減衰されて車載装置に到達する。その結果、携帯装置が判定エリア内に存在する場合であっても、車載装置の測定するRSSI値がしきい値αを下回ってしまうことがある。
If the user's body is between the in-vehicle device and the portable device, the radio wave radiated from the portable device is attenuated by the human body and reaches the in-vehicle device. As a result, even when the mobile device is present in the determination area, the RSSI value measured by the in-vehicle device may fall below the threshold value α.
したがって、この場合、判定エリア内に携帯装置が存在する場合であっても、携帯装置が判定エリアの外へ出たとの誤判定が行われ、使用者が車両を離れていない状態であっても、ドアロックのし忘れ等の情報が使用者に報知される。このため、報知されるタイミング(車両からの離れ度合い)のばらつきが大きくなってしまう。
Therefore, in this case, even if the mobile device exists in the determination area, even if the mobile device has been erroneously determined to have gone out of the determination area, the user has not left the vehicle. Information such as forgetting to lock the door is notified to the user. For this reason, the dispersion | variation in the timing (distance from a vehicle) alert | reported will become large.
本開示は、携帯装置が判定エリア内に存在するにもかかわらず携帯装置が判定エリアの外へ出たと誤判定されることを抑制する技術を提供することを目的とする。
This disclosure is intended to provide a technique for suppressing erroneous determination that a mobile device has moved out of the determination area even though the mobile device is present in the determination area.
本開示の第1の態様によれば、携帯装置は車両に搭載された車載装置と無線通信を行い、取得部と、第一の測定部と、第一の判定部と、を備える。取得部は、車載装置との間の無線通信の信号強度を取得する。第一の測定部は、当該携帯装置の加速度を測定する。第一の判定部は、取得部により取得された信号強度と、第一の測定部により測定された加速度と、に基づき、当該携帯装置が車両周辺の判定エリア内に存在するか否かを判定する。第一の判定部は、加速度に基づき、当該携帯装置と車両との間の距離を推定し、距離が第一のしきい値以上であり、かつ、信号強度が第二のしきい値以下である場合に、当該携帯装置が判定エリア内に存在しないと判定する。
According to the first aspect of the present disclosure, the mobile device performs wireless communication with the in-vehicle device mounted on the vehicle, and includes an acquisition unit, a first measurement unit, and a first determination unit. The acquisition unit acquires the signal strength of wireless communication with the in-vehicle device. The first measurement unit measures the acceleration of the portable device. The first determination unit determines whether or not the portable device is present in a determination area around the vehicle based on the signal intensity acquired by the acquisition unit and the acceleration measured by the first measurement unit. To do. The first determination unit estimates the distance between the portable device and the vehicle based on the acceleration, the distance is equal to or greater than the first threshold value, and the signal strength is equal to or less than the second threshold value. In some cases, it is determined that the portable device does not exist within the determination area.
本開示の第2の態様によれば、位置検出システムは、車両に搭載された車載装置と、車載装置と無線通信を行う携帯装置と、を備える。携帯装置は、取得部と、第一の測定部と、第一の判定部と、を備える。取得部は、車載装置との間の無線通信の信号強度を取得する。第一の測定部は、当該携帯装置の加速度を測定する。第一の判定部は、取得部により取得された信号強度と、第一の測定部により測定された加速度と、に基づき、当該携帯装置が車両周辺の判定エリア内に存在するか否かを判定する。第一の判定部は、加速度に基づき、当該携帯装置と車両との間の距離を推定し、距離が第一のしきい値以上であり、かつ、信号強度が第二のしきい値以下である場合に、当該携帯装置が判定エリア内に存在しないと判定する。
According to the second aspect of the present disclosure, the position detection system includes an in-vehicle device mounted on a vehicle and a portable device that performs wireless communication with the in-vehicle device. The portable device includes an acquisition unit, a first measurement unit, and a first determination unit. The acquisition unit acquires the signal strength of wireless communication with the in-vehicle device. The first measurement unit measures the acceleration of the portable device. The first determination unit determines whether or not the portable device is present in a determination area around the vehicle based on the signal intensity acquired by the acquisition unit and the acceleration measured by the first measurement unit. To do. The first determination unit estimates the distance between the portable device and the vehicle based on the acceleration, the distance is equal to or greater than the first threshold value, and the signal strength is equal to or less than the second threshold value. In some cases, it is determined that the portable device does not exist within the determination area.
携帯装置及び位置検出システムによれば、例え携帯装置が判定エリアに存在するにもかかわらず信号強度が第二のしきい値以下になったとしても、加速度に基づき推定された距離が第一のしきい値以上でない場合は、携帯装置が判定エリアの外へ出たとの誤判定を抑制することができる。したがって、携帯装置が判定エリア内から判定エリアの外へ出たと判定されるタイミングと、実際に携帯装置が判定エリアの外へ出たタイミングと、のばらつきを抑えることができる。
According to the portable device and the position detection system, even if the portable device exists in the determination area, even if the signal strength is equal to or lower than the second threshold value, the distance estimated based on the acceleration is the first If it is not greater than or equal to the threshold value, it is possible to suppress erroneous determination that the mobile device has gone out of the determination area. Therefore, it is possible to suppress variations between the timing at which the mobile device is determined to have moved out of the determination area from the determination area and the timing at which the mobile device has actually moved out of the determination area.
本開示についての上記および他の目的、特徴や利点は、添付の図面を参照した下記の詳細な説明から、より明確になる。添付図面において
図1は、第1実施形態における車両及び携帯装置の構成を表すブロック図であり、
図2は、車両周辺の判定エリアを表す図であり、
図3は、第1実施形態の情報送信処理を表すフローチャートであり、
図4は、第1実施形態の車両情報報知処理を表すフローチャートであり、
図5は、第1実施形態の判定ロジックを表すフローチャートであり、
図6は、第2実施形態における車両及び携帯装置の構成を表すブロック図であり、
図7は、第2実施形態の判定ロジックを表すフローチャートであり、
図8は、第3実施形態の車両情報報知処理を表すフローチャートであり、
図9は、第3実施形態の情報送信処理を表すフローチャートである。
The above and other objects, features and advantages of the present disclosure will become more apparent from the following detailed description with reference to the accompanying drawings. In the attached drawings
FIG. 1 is a block diagram illustrating configurations of a vehicle and a portable device in the first embodiment. FIG. 2 is a diagram showing a determination area around the vehicle, FIG. 3 is a flowchart showing the information transmission process of the first embodiment. FIG. 4 is a flowchart showing the vehicle information notification process of the first embodiment. FIG. 5 is a flowchart showing the determination logic of the first embodiment. FIG. 6 is a block diagram showing the configuration of the vehicle and the portable device in the second embodiment. FIG. 7 is a flowchart showing the determination logic of the second embodiment. FIG. 8 is a flowchart showing the vehicle information notification process of the third embodiment. FIG. 9 is a flowchart showing the information transmission process of the third embodiment.
以下、実施形態について、図面を用いて説明する。
Hereinafter, embodiments will be described with reference to the drawings.
[1.第1実施形態]
[1-1.構成]
第1実施形態の車両1は、図1に示すように、ドアロックセンサ101、ドア開閉センサ102、窓開閉センサ103、ヘッドライトスイッチ104、スモールライトスイッチ105、ハザードランプスイッチ106、イグニッションスイッチ107、ドアロックアクチュエータ108、ボデーECU11、スマートキー通信部12、照合ECU13、車載装置15及びアンテナ(車両アンテナとも呼ぶ)16を備える。ボデーECU11、照合ECU13及び車載装置15は、共通のバス14に接続され、これらは例えばCAN(Controller Area Network)プロトコル等に従った相互通信を行う。 [1. First Embodiment]
[1-1. Constitution]
As shown in FIG. 1, thevehicle 1 of the first embodiment includes a door lock sensor 101, a door opening / closing sensor 102, a window opening / closing sensor 103, a headlight switch 104, a small light switch 105, a hazard lamp switch 106, an ignition switch 107, A door lock actuator 108, a body ECU 11, a smart key communication unit 12, a verification ECU 13, an in-vehicle device 15, and an antenna (also referred to as a vehicle antenna) 16 are provided. The body ECU 11, the verification ECU 13, and the in-vehicle device 15 are connected to a common bus 14, and these perform mutual communication according to, for example, a CAN (Controller Area Network) protocol.
[1-1.構成]
第1実施形態の車両1は、図1に示すように、ドアロックセンサ101、ドア開閉センサ102、窓開閉センサ103、ヘッドライトスイッチ104、スモールライトスイッチ105、ハザードランプスイッチ106、イグニッションスイッチ107、ドアロックアクチュエータ108、ボデーECU11、スマートキー通信部12、照合ECU13、車載装置15及びアンテナ(車両アンテナとも呼ぶ)16を備える。ボデーECU11、照合ECU13及び車載装置15は、共通のバス14に接続され、これらは例えばCAN(Controller Area Network)プロトコル等に従った相互通信を行う。 [1. First Embodiment]
[1-1. Constitution]
As shown in FIG. 1, the
ドアロックセンサ101及びドア開閉センサ102は、車両1に設けられたドア(本実施形態では、運転席ドア、助手席ドア、後部座席ドア及びバックドア)のそれぞれに設けられている。ドアロックセンサ101は、各ドアの施錠開錠状態を検出する。ドア開閉センサ102は、各ドアの開閉状態を検出する。
The door lock sensor 101 and the door opening / closing sensor 102 are provided on each of the doors provided in the vehicle 1 (in this embodiment, a driver seat door, a passenger seat door, a rear seat door, and a back door). The door lock sensor 101 detects the unlocked state of each door. The door open / close sensor 102 detects the open / closed state of each door.
窓開閉センサ103は、運転席ドア、助手席ドア及び後部座席ドアに設けられており、各ドアに備えられた窓の開閉状態を検出する。
The window opening / closing sensor 103 is provided in the driver's seat door, the passenger seat door, and the rear seat door, and detects the opening / closing state of the window provided in each door.
ヘッドライトスイッチ104は、車両1に設けられたヘッドライトの作動(点灯及び消灯)を制御する。スモールライトスイッチ105は、車両1に設けられたスモールライトの作動(点灯及び消灯)を制御する。ハザードランプスイッチ106は、車両1に設けられたハザードランプの作動(点滅及び消灯)を制御する。イグニッションスイッチ107は、車両1に設けられたイグニッションの作動(オン及びオフ)を制御する。
The headlight switch 104 controls the operation (lighting and extinguishing) of the headlight provided in the vehicle 1. The small light switch 105 controls the operation (lighting and extinguishing) of the small light provided in the vehicle 1. The hazard lamp switch 106 controls the operation (flashing and extinguishing) of the hazard lamp provided in the vehicle 1. The ignition switch 107 controls the operation (on and off) of the ignition provided in the vehicle 1.
ボデーECU11は、CPU、ROM及びRAMを中心とする周知のマイクロコンピュータを備え、各種センサ・スイッチ101~107により検出された情報を取得する。なお、ECUとは、電子制御装置を意味する。
The body ECU 11 includes a known microcomputer centered on a CPU, a ROM, and a RAM, and acquires information detected by various sensor switches 101 to 107. The ECU means an electronic control device.
ドアロックアクチュエータ108は、運転席ドア、助手席ドア、後部座席ドア及びバックドアの各ドアに設けられており、ボデーECU11からの指示に基づき、各ドアの施錠及び開錠を行う。
The door lock actuator 108 is provided in each of the driver door, the passenger door, the rear seat door, and the back door, and locks and unlocks each door based on an instruction from the body ECU 11.
スマートキー通信部12は、車両1内に定期的にポーリング信号を無線送信し、ポーリング信号を受信した携帯キー(スマートキー)から返送信号として無線送信されるIDコードを受信する。
The smart key communication unit 12 periodically transmits a polling signal into the vehicle 1 and receives an ID code wirelessly transmitted as a return signal from the mobile key (smart key) that has received the polling signal.
照合ECU13は、CPU、ROM及びRAMを中心とする周知のマイクロコンピュータを備え、スマートキー通信部12からIDコードを取得する。照合ECU13は、スマートキー通信部12によりIDコードが受信されている状態を、スマートキーが車両1内に存在する状態として検出する。
The verification ECU 13 includes a well-known microcomputer centered on a CPU, ROM, and RAM, and acquires an ID code from the smart key communication unit 12. The verification ECU 13 detects a state in which the ID code is received by the smart key communication unit 12 as a state in which the smart key exists in the vehicle 1.
車載装置15は、通信部(車載装置の通信部に相当する)151及び制御部152を備える。
The in-vehicle device 15 includes a communication unit (corresponding to a communication unit of the in-vehicle device) 151 and a control unit 152.
通信部151は、近距離無線通信規格の一つであるBluetooth(登録商標、以下、BTと記載する)にて無線通信を行うBT通信機能を備え、BT通信機能を有する携帯装置2とアンテナ16を介して無線通信を行う。なお、BT通信機能を有する携帯装置2としては、例えば、携帯電話やスマートフォンなどが挙げられる。また、通信部151は、携帯装置2から送信された無線信号の信号強度の値(RSSI値)を測定する。
The communication unit 151 includes a BT communication function for performing wireless communication using Bluetooth (registered trademark, hereinafter referred to as BT), which is one of the short-range wireless communication standards, and the portable device 2 having the BT communication function and the antenna 16. Wireless communication is performed via Examples of the mobile device 2 having the BT communication function include a mobile phone and a smartphone. In addition, the communication unit 151 measures the signal strength value (RSSI value) of the radio signal transmitted from the mobile device 2.
制御部152は、CPU、ROM及びRAMを中心とする周知のマイクロコンピュータを備え、通信部151からRSSI値を取得する。
The control unit 152 includes a known microcomputer centered on a CPU, ROM, and RAM, and acquires an RSSI value from the communication unit 151.
制御部152は、ボデーECU11から、車両1の各ドアの施錠開錠状態を表す情報、車両1の各ドアの開閉状態を表す情報、車両1の各窓の開閉状態を表す情報、並びに、車両1のヘッドライト及びスモールライトの点灯消灯状態を表す情報を取得する。また、制御部152は、ボデーECU11から、車両1のハザードランプの点滅消灯状態を表す情報、及び、車両1のイグニッションスイッチ107のオンオフ状態を表す情報を取得する。
From the body ECU 11, the control unit 152 receives information representing the unlocked state of each door of the vehicle 1, information representing the opened / closed state of each door of the vehicle 1, information representing the opened / closed state of each window of the vehicle 1, and the vehicle Information indicating the lighting / extinguishing state of one headlight and small light is acquired. In addition, the control unit 152 acquires information representing the blinking / unlit state of the hazard lamp of the vehicle 1 and information representing the on / off state of the ignition switch 107 of the vehicle 1 from the body ECU 11.
さらに、制御部152は、照合ECU13から、スマートキーが車両1内に存在するか否かの情報を取得する。なお、以下では、制御部152がボデーECU11及び照合ECU13から取得する上記の情報を総じて「車両情報」と記載する。
Further, the control unit 152 acquires information on whether or not the smart key exists in the vehicle 1 from the verification ECU 13. Hereinafter, the above information acquired by the control unit 152 from the body ECU 11 and the verification ECU 13 is collectively referred to as “vehicle information”.
また、制御部152は、後述する情報送信処理(図3)を実行することにより、通信部151を介して、RSSI値及び車両情報を携帯装置2へ定期的に送信する。
Further, the control unit 152 periodically transmits the RSSI value and the vehicle information to the portable device 2 via the communication unit 151 by executing an information transmission process (FIG. 3) described later.
一方、第1実施形態の携帯装置2は、図1に示されるように、加速度センサ21、通信部(携帯装置の通信部とも呼ぶ)22、アンテナ(携帯装置のアンテナ)23、表示部24及び制御部25を備える。
On the other hand, as shown in FIG. 1, the portable device 2 of the first embodiment includes an acceleration sensor 21, a communication unit (also referred to as a communication unit of a portable device) 22, an antenna (antenna of the portable device) 23, a display unit 24, and A control unit 25 is provided.
加速度センサ21は、携帯装置2の加速度を測定する。例えば、運転者等の使用者3(図2参照)が携帯装置2を携帯した状態で歩くと、使用者3の動きに伴い携帯装置2が振動し、振動による加速度が加速度センサ21により測定される。
The acceleration sensor 21 measures the acceleration of the mobile device 2. For example, when a user 3 (see FIG. 2) such as a driver walks with the portable device 2, the portable device 2 vibrates with the movement of the user 3, and the acceleration due to the vibration is measured by the acceleration sensor 21. The
通信部22は、BT通信機能を備え、アンテナ23を介して車載装置15と無線通信を行う。
The communication unit 22 has a BT communication function, and performs wireless communication with the in-vehicle device 15 via the antenna 23.
表示部24は、表示画面を備え、制御部25からの指示に従い画像(文字等を含む)を表示する。
The display unit 24 includes a display screen and displays an image (including characters) according to an instruction from the control unit 25.
制御部25は、CPU、ROM及びRAMを中心とする周知のマイクロコンピュータを備える。制御部25は、加速度センサ21から加速度を取得し、車載装置15から送信されたRSSI値及び車両情報を通信部22を介して取得する。また、制御部25は、加速度、RSSI値及び車両情報に基づき、後述する車両情報報知処理(図4)を実行する。
The control unit 25 includes a known microcomputer centered on a CPU, ROM, and RAM. The control unit 25 acquires acceleration from the acceleration sensor 21 and acquires the RSSI value and vehicle information transmitted from the in-vehicle device 15 via the communication unit 22. Moreover, the control part 25 performs the vehicle information alerting | reporting process (FIG. 4) mentioned later based on an acceleration, an RSSI value, and vehicle information.
[1-2.処理]
次に、車載装置15の制御部152が行う情報送信処理を図3を用いて説明する。なお、情報送信処理は、車両情報報知処理(図4)が実行されることにより実行される。すなわち、車両情報報知処理が開始されると、携帯装置2と車載装置15との間に無線通信のリンクが確立され、リンクが確立された後に、情報送信処理が開始される。 [1-2. processing]
Next, information transmission processing performed by thecontrol unit 152 of the in-vehicle device 15 will be described with reference to FIG. The information transmission process is executed by executing the vehicle information notification process (FIG. 4). That is, when the vehicle information notification process is started, a wireless communication link is established between the portable device 2 and the in-vehicle device 15, and the information transmission process is started after the link is established.
次に、車載装置15の制御部152が行う情報送信処理を図3を用いて説明する。なお、情報送信処理は、車両情報報知処理(図4)が実行されることにより実行される。すなわち、車両情報報知処理が開始されると、携帯装置2と車載装置15との間に無線通信のリンクが確立され、リンクが確立された後に、情報送信処理が開始される。 [1-2. processing]
Next, information transmission processing performed by the
まず、制御部152は、S101にてリンクロス(電波環境変化等に伴うリンクの切断)があるか否かを判定する。制御部152は、リンクロスがあると判定した場合は(S101:YES)、情報送信処理を終了する。
First, the control unit 152 determines whether or not there is a link loss (link disconnection associated with a radio wave environment change or the like) in S101. When determining that there is a link loss (S101: YES), the control unit 152 ends the information transmission process.
一方、制御部152は、リンクロスはないと判定した場合には(S101:NO)、通信部151からRSSI値を取得し、ボデーECU11及び照合ECU13の各種ECUから車両情報を取得する(S102)。そして、制御部152は、取得したRSSI値と車両情報とを通信部151を介して携帯装置2へ送信する(S103)。
On the other hand, when it determines with there being no link loss (S101: NO), the control part 152 acquires an RSSI value from the communication part 151, and acquires vehicle information from various ECU of body ECU11 and collation ECU13 (S102). . And the control part 152 transmits the acquired RSSI value and vehicle information to the portable apparatus 2 via the communication part 151 (S103).
続いて、制御部152は、S104にてリンクロスがあるか否かを判定し、リンクロスがあると判定した場合には(S104:YES)、情報送信処理を終了する。また、制御部152は、リンクロスはないと判定した場合には(S104:NO)、携帯装置2から送信されたリンク切断命令を通信部151が受信したか否かを判定する(S105)。ここでいうリンク切断命令は、携帯装置2から送信される情報であってリンクの切断を命じる旨の情報であり、携帯装置2の制御部25が後述の車両情報報知処理(図4)を実行することにより送信される。
Subsequently, the control unit 152 determines whether or not there is a link loss in S104. If it is determined that there is a link loss (S104: YES), the information transmission process is terminated. When determining that there is no link loss (S104: NO), the control unit 152 determines whether the communication unit 151 has received a link disconnection command transmitted from the portable device 2 (S105). The link disconnection command here is information transmitted from the mobile device 2 and is information indicating that the link is to be disconnected, and the control unit 25 of the mobile device 2 executes vehicle information notification processing (FIG. 4) described later. To be transmitted.
制御部152は、通信部151がリンク切断命令を受信したと判定した場合には(S105:YES)、リンクを切断し(S106)、情報送信処理を終了する。
If the control unit 152 determines that the communication unit 151 has received the link disconnection command (S105: YES), the control unit 152 disconnects the link (S106) and ends the information transmission process.
一方、制御部152は、通信部151がリンク切断命令を受信していないと判定した場合は(S105:NO)、S102に戻り、前述したS102以降の処理を繰り返す。したがって、リンクロスが生じず、通信部151がリンク切断命令を受信しない限りは、RSSI値及び車両情報が車載装置15から携帯装置2へ定期的に送信される。
On the other hand, if the control unit 152 determines that the communication unit 151 has not received the link disconnection command (S105: NO), the control unit 152 returns to S102 and repeats the processing after S102 described above. Therefore, unless the link loss occurs and the communication unit 151 does not receive the link disconnection command, the RSSI value and the vehicle information are periodically transmitted from the in-vehicle device 15 to the portable device 2.
次に、携帯装置2の制御部25が行う車両情報報知処理を図4を用いて説明する。車両情報報知処理は、携帯装置2において、専用のアプリケーションが起動されることにより開始される。なお、上記アプリケーションは、使用者3が車両1に乗車してから降車する前までに起動することが想定されている。制御部25は、上記アプリケーションが起動している間は、加速度センサ21から取得した加速度に基づき、使用者3の移動量の積算値(使用者3の移動した歩数)を常時カウントする。
Next, vehicle information notification processing performed by the control unit 25 of the portable device 2 will be described with reference to FIG. The vehicle information notification process is started when a dedicated application is activated in the mobile device 2. The application is assumed to be started before the user 3 gets on the vehicle 1 and before getting off. While the application is activated, the control unit 25 constantly counts the integrated value of the movement amount of the user 3 (the number of steps moved by the user 3) based on the acceleration acquired from the acceleration sensor 21.
まず、制御部25は、報知フラグを0にセットする(S201)。ここで、報知フラグとは、後述する報知(S208)が行われているか否かを表すフラグである。報知フラグが1であることは報知中であることを表し、報知フラグが0であることは報知中でないことを表す。
First, the control unit 25 sets the notification flag to 0 (S201). Here, the notification flag is a flag indicating whether notification (S208) described later is performed. A notification flag of 1 indicates that notification is being performed, and a notification flag of 0 indicates that notification is not being performed.
次に、制御部25は、リンクロスがあるか否かを判定し(S202)、リンクロスがないと判定した場合は(S202:NO)、車載装置15から送信されたRSSI値及び車両情報を通信部22を介して取得する(S203)。
Next, the control unit 25 determines whether or not there is a link loss (S202). When it is determined that there is no link loss (S202: NO), the RSSI value and vehicle information transmitted from the in-vehicle device 15 are determined. Obtained via the communication unit 22 (S203).
続いて、制御部25は、リンクロスがあるか否かを判定する(S204)。制御部25は、リンクロスがないと判定した場合は(S204:NO)、後述する判定ロジック(図5)に基づき、携帯装置2(延いては使用者3)が車両1を中心とする判定エリア4(図2参照)内に存在するか否かを判定する(S205)。
Subsequently, the control unit 25 determines whether or not there is a link loss (S204). When it is determined that there is no link loss (S204: NO), the control unit 25 determines that the mobile device 2 (and hence the user 3) is centered on the vehicle 1 based on a determination logic (FIG. 5) described later. It is determined whether or not it exists in area 4 (see FIG. 2) (S205).
制御部25は、S205にて携帯装置2が判定エリア4内に存在すると判定した場合は(S205:YES)、S203に戻り、前述したS203以降の処理を繰り返す。
When the control unit 25 determines in S205 that the mobile device 2 is present in the determination area 4 (S205: YES), the control unit 25 returns to S203 and repeats the above-described processing after S203.
一方、制御部25は、携帯装置2が判定エリア4内に存在しないと判定した場合(つまり、携帯装置2が判定エリア4内にて非存在であると判定した場合)、すなわち、使用者3が判定エリア4内から判定エリア4の外へ出たと判定した場合は(S205:NO)、報知要因があるか否かを判定する(S206)。ここでいう報知要因とは、車両1を乗員が降車する際に行うべき操作が忘れられていること、例えばドアロックのし忘れやドアの閉め忘れ等の「し忘れ」のことである。報知要因があるか否かの判定は、S203にて取得された車両情報に基づいて行われる。
On the other hand, the control unit 25 determines that the mobile device 2 does not exist in the determination area 4 (that is, determines that the mobile device 2 does not exist in the determination area 4), that is, the user 3 Is determined to have gone out of the determination area 4 from within the determination area 4 (S205: NO), it is determined whether there is a notification factor (S206). The notification factor here means that an operation to be performed when the occupant gets out of the vehicle 1 is forgotten, for example, “forgotten” such as forgetting to lock the door or forgetting to close the door. The determination as to whether or not there is a notification factor is performed based on the vehicle information acquired in S203.
また、制御部25は、S202にてリンクロスがあると判定した場合は(S202:YES)、S203~S205の処理を飛ばし、S206の処理を行う。同様に、制御部25は、S204にてリンクロスがあると判定した場合は(S204:YES)、S205の処理を飛ばし、S206の処理を行う。したがって、制御部25は、携帯装置2が判定エリア4内に存在するときにリンクロスが生じた場合であっても、S206以降の処理を行う。
Further, when it is determined that there is a link loss in S202 (S202: YES), the control unit 25 skips the processes of S203 to S205 and performs the process of S206. Similarly, when it is determined that there is a link loss in S204 (S204: YES), the control unit 25 skips the process of S205 and performs the process of S206. Therefore, the control unit 25 performs the processing from S206 onward even when a link loss occurs when the mobile device 2 is present in the determination area 4.
制御部25は、S206で報知要因があると判定した場合は(S206:YES)、報知フラグが1であるか否かを判定する(S207)。制御部25は、報知フラグが1でないと判定した場合は(S207:NO)、表示部24に報知要因がある旨を表示する等により、報知を行う(S208)。つまり、判定エリア4は、「し忘れ」の報知を行うタイミング、換言すれば、使用者3が降車して車両1から離れたタイミングを判定するためのエリアである。なお、上記報知は後述するS212にて報知解除が行われるまで実行され続ける。また、制御部25は、報知開始後に報知フラグを1にセットする(S209)。
When it is determined that there is a notification factor in S206 (S206: YES), the control unit 25 determines whether or not the notification flag is 1 (S207). When the control unit 25 determines that the notification flag is not 1 (S207: NO), the control unit 25 performs notification by displaying that there is a notification factor on the display unit 24 (S208). In other words, the determination area 4 is an area for determining the timing at which the “forgetting to perform” notification, in other words, the timing at which the user 3 gets off the vehicle 1 and leaves the vehicle 1. The notification continues to be executed until the notification is canceled in S212 described later. Moreover, the control part 25 sets a notification flag to 1 after a notification start (S209).
続いて、制御部25は、リンクロスがあるか否かを判定し(S210)、リンクロスがあると判定した場合は(S210:YES)、車両情報報知処理を終了する。
Subsequently, the control unit 25 determines whether or not there is a link loss (S210). If it is determined that there is a link loss (S210: YES), the vehicle information notification process is terminated.
一方、制御部25は、リンクロスがないと判定した場合は(S210:NO)、S203に戻り、前述したS203以降の処理を繰り返す。
On the other hand, if it is determined that there is no link loss (S210: NO), the control unit 25 returns to S203 and repeats the processing from S203 described above.
なお、制御部25は、報知開始後から再度S206の処理が行われるまでに報知要因が解消されていない場合は、S206にて再度報知要因があると判定する(S206:YES)。その場合、制御部25は、S207にて報知フラグが1である、すなわち、報知が既に行われていると判定し(S207:YES)、S203に戻り、前述したS203以降の処理を繰り返す。
In addition, the control part 25 determines with there being an alerting | reporting factor again in S206, when the alerting | reporting factor is not eliminated by the process of S206 being performed again after the notification start (S206: YES). In that case, the control unit 25 determines that the notification flag is 1 in S207, that is, that the notification has already been performed (S207: YES), returns to S203, and repeats the processing after S203 described above.
一方、制御部25は、S206で報知要因がないと判定した場合には(S206:NO)、報知フラグが1であるか否か、すなわち、報知が行われているか否かを判定する(S211)。なお、報知要因がない場合には、もともと報知要因がない場合と報知開始後に報知要因が除去された場合とが含まれる。
On the other hand, if it is determined in S206 that there is no notification factor (S206: NO), the control unit 25 determines whether the notification flag is 1, that is, whether notification is being performed (S211). ). The case where there is no notification factor includes the case where there is no notification factor from the beginning and the case where the notification factor is removed after the start of notification.
制御部25は、S211にて報知フラグが1であると判定した場合、つまり、報知開始後に報知要因が除去されたと判定した場合は(S211:YES)、報知を解除し(S212)、報知フラグを0にセットする(S213)。そして、制御部25は、リンクを切断し、リンク切断命令を車載装置15へ通信部22を介して送信する(S214)。その後、制御部25は、車両情報報知処理を終了する。
When it is determined that the notification flag is 1 in S211, that is, when it is determined that the notification factor has been removed after the start of notification (S211: YES), the control unit 25 cancels the notification (S212), and the notification flag Is set to 0 (S213). And the control part 25 cut | disconnects a link and transmits a link cutting | disconnection command to the vehicle-mounted apparatus 15 via the communication part 22 (S214). Thereafter, the control unit 25 ends the vehicle information notification process.
一方、制御部25は、S211にて報知フラグが1でないと判定した場合、つまり、もともと報知要因がないと判定した場合は(S211:NO)、S212~S213の処理を飛ばし、S214の処理を行った後、車両情報報知処理を終了する。
On the other hand, when it is determined in S211 that the notification flag is not 1, that is, when it is determined that there is no notification factor (S211: NO), the control unit 25 skips the processing of S212 to S213 and performs the processing of S214. After having performed, a vehicle information alerting | reporting process is complete | finished.
次に、S205で実行される判定ロジックを図5を用いて説明する。
Next, the determination logic executed in S205 will be described with reference to FIG.
まず、制御部25は、S203にて取得された車両情報に含まれるイグニッションスイッチ107のオンオフを表す情報に基づき、車両1のイグニッションスイッチ107がオフであるか否かを判定する(S301)。制御部25は、イグニッションスイッチ107がオフでない(つまりオンである)と判定した場合は(S301:NO)、携帯装置2(延いては使用者3)は判定エリア4内に存在すると判定する。
First, the control unit 25 determines whether or not the ignition switch 107 of the vehicle 1 is OFF based on information indicating ON / OFF of the ignition switch 107 included in the vehicle information acquired in S203 (S301). When the control unit 25 determines that the ignition switch 107 is not off (that is, is on) (S301: NO), the control unit 25 determines that the portable device 2 (and thus the user 3) exists in the determination area 4.
一方、制御部25は、S301にてイグニッションスイッチ107がオフであると判定した場合は(S301:YES)、カウントリセット条件が満たされたか否かを判定する(S302)。なお、制御部25は、S203にて取得された車両情報に含まれる車両1の各ドア(運転席ドア、助手席ドア、後部座席ドア及びバックドア)の開閉状態を表す開閉情報に基づき、いずれかのドアが開閉されたと判定した場合は、カウントリセット条件が満たされたと判定する。ここでいう開閉とは、閉状態から開状態への変化、及び、開状態から閉状態への変化、のいずれも含まれる。例えば、運転席ドアの閉状態を表す開閉情報が取得された後に運転席ドアの開状態を表す開閉情報が取得された場合は、運転席ドアは開閉されたと判定され、カウントリセット条件が満たされたと判定される。
On the other hand, when it is determined in S301 that the ignition switch 107 is OFF (S301: YES), the control unit 25 determines whether the count reset condition is satisfied (S302). In addition, the control part 25 is based on the opening / closing information showing the opening / closing state of each door (a driver's seat door, a passenger seat door, a rear seat door, and a back door) of the vehicle 1 included in the vehicle information acquired in S203. If it is determined that the door has been opened or closed, it is determined that the count reset condition is satisfied. The term “open / close” as used herein includes both a change from the closed state to the open state and a change from the open state to the closed state. For example, when the opening / closing information indicating the open state of the driver's seat door is acquired after the opening / closing information indicating the closed state of the driver's seat door is acquired, it is determined that the driver's seat door is opened and closed, and the count reset condition is satisfied. It is determined that
制御部25は、S302でカウントリセット条件が満たされたと判定した場合は(S302:YES)、使用者3の移動量の積算値(使用者3の移動した歩数)をリセットする(S303)。なお、カウントリセット条件は、少なくとも使用者3が降車の契機となる所定の動作を行ったとき(すなわち、使用者3が車両1を降りる際にドアを開閉したとき)に満たされるため、歩数は、少なくとも使用者3の降車時にリセットされる。
When it is determined that the count reset condition is satisfied in S302 (S302: YES), the control unit 25 resets the integrated value of the movement amount of the user 3 (the number of steps moved by the user 3) (S303). Since the count reset condition is satisfied at least when the user 3 performs a predetermined operation that triggers the getting off (that is, when the user 3 opens and closes the door when getting off the vehicle 1), the number of steps is At least when the user 3 gets off the vehicle.
続いて、制御部25は、最後のリセット以降にカウントされた歩数(つまり現在のカウント値)が所定のしきい値Th1以上であるか否かを判定する(S304)。しきい値Th1は、例えば、降車してから判定エリア4の外へ出るために必要な最低限の歩数を目安に設定される。なお、制御部25は、S302にてカウントリセット条件が満たされていないと判定した場合は(S302:NO)、S303の処理を飛ばし、S304の処理を実行する。
Subsequently, the control unit 25 determines whether or not the number of steps counted since the last reset (that is, the current count value) is greater than or equal to a predetermined threshold value Th1 (S304). The threshold value Th1 is set, for example, based on the minimum number of steps necessary to get out of the determination area 4 after getting off the vehicle. If the control unit 25 determines in S302 that the count reset condition is not satisfied (S302: NO), it skips the process of S303 and executes the process of S304.
制御部25は、S304で歩数がしきい値Th1以上であると判定した場合は(S304:YES)、S203にて取得された最新のRSSI値が所定のしきい値Th2以下であるか否かを判定する(S305)。しきい値Th2は、例えば、車載装置15と携帯装置2との間に使用者3の体等の遮蔽物がない場合での、判定エリア4の中と外の境目上に位置する携帯装置2から送信された無線信号のRSSI値を目安に設定される。制御部25は、RSSI値が所定のしきい値Th2以下であると判定した場合は(S305:YES)、携帯装置2は判定エリア4外に存在すると判定し、図5の判定ロジックを終了する。
If the control unit 25 determines in step S304 that the number of steps is equal to or greater than the threshold value Th1 (S304: YES), whether or not the latest RSSI value acquired in step S203 is equal to or less than the predetermined threshold value Th2. Is determined (S305). The threshold value Th <b> 2 is, for example, the portable device 2 located on the boundary between the determination area 4 and the outside when there is no shielding object such as the body of the user 3 between the in-vehicle device 15 and the portable device 2. Is set with reference to the RSSI value of the radio signal transmitted from. When it is determined that the RSSI value is equal to or less than the predetermined threshold Th2 (S305: YES), the control unit 25 determines that the mobile device 2 is outside the determination area 4 and ends the determination logic of FIG. .
一方、制御部25は、S304で歩数がしきい値Th1以上でないと判定した場合(S304:NO)、又は、S305でRSSI値がしきい値Th2以下でないと判定した場合は(S305:NO)、携帯装置2は判定エリア4内に存在すると判定し、図5の判定ロジックを終了する。
On the other hand, when the control unit 25 determines in S304 that the number of steps is not equal to or greater than the threshold value Th1 (S304: NO), or when it is determined in S305 that the RSSI value is not equal to or less than the threshold value Th2 (S305: NO). The portable device 2 determines that it exists in the determination area 4, and ends the determination logic of FIG.
[1-3.効果]
以上、詳述した第1実施形態によれば、以下の効果が得られる。 [1-3. effect]
As described above, according to the first embodiment described in detail, the following effects can be obtained.
以上、詳述した第1実施形態によれば、以下の効果が得られる。 [1-3. effect]
As described above, according to the first embodiment described in detail, the following effects can be obtained.
第1実施形態の携帯装置2は、車両1に搭載された車載装置15と無線通信を行うことで、当該携帯装置2(延いては使用者3)が判定エリア4内から判定エリア4の外へ出たか否かを判定する。そして、携帯装置2は、当該携帯装置2が判定エリア4の外へ出たと判定した場合に、車載装置15から送信された車両情報に基づき、車両1の状態が、ドアロックのし忘れや窓の閉め忘れ等の「し忘れ」(報知要因)がない状態であるか否かを判定する。また、携帯装置2は、車両1の状態が報知要因がある状態であると判定した場合は、使用者3に報知する。
The mobile device 2 of the first embodiment performs wireless communication with the in-vehicle device 15 mounted on the vehicle 1, so that the mobile device 2 (and thus the user 3) can move from the determination area 4 to the outside of the determination area 4. It is determined whether or not. When the portable device 2 determines that the portable device 2 has gone out of the determination area 4, the state of the vehicle 1 is based on the vehicle information transmitted from the in-vehicle device 15, and the state of the vehicle 1 is forgotten to lock the door or the window. It is determined whether or not there is no “forgetting” (notification factor) such as forgetting to close. Moreover, the portable apparatus 2 alert | reports to the user 3, when it determines with the state of the vehicle 1 having a alerting | reporting factor.
車載装置15の測定するRSSI値は、人体等の遮蔽物により、携帯装置2が判定エリア4内に存在する場合であっても、しきい値Th2以下になることがある。そのような場合、RSSI値のみに基づいて携帯装置2が判定エリア4内から判定エリア4の外へ出たか否かの判定を行うと、実際には携帯装置2が判定エリア4内に存在するにもかかわらず、携帯装置2が判定エリア4の外へ出たとの誤判定が行われる。したがって、報知されるタイミング(車両からの離れ度合い)のばらつきが大きくなってしまう。
The RSSI value measured by the in-vehicle device 15 may be equal to or less than the threshold value Th2 even when the portable device 2 exists in the determination area 4 due to a shield such as a human body. In such a case, when the mobile device 2 determines whether or not the mobile device 2 has moved out of the determination area 4 based on only the RSSI value, the mobile device 2 actually exists in the determination area 4. Nevertheless, an erroneous determination that the portable device 2 has gone out of the determination area 4 is performed. Therefore, the variation of the notified timing (degree of separation from the vehicle) becomes large.
一方、第1実施形態の携帯装置2は、RSSI値に加えて、携帯装置2の加速度(延いては、加速度に基づいてカウントされる歩数)に基づき、携帯装置2が判定エリア4の外へ出たか否かの判定を行う。
On the other hand, the mobile device 2 of the first embodiment moves the mobile device 2 out of the determination area 4 based on the acceleration of the mobile device 2 (and thus the number of steps counted based on the acceleration) in addition to the RSSI value. Judgment is made as to whether or not it has come out.
したがって、携帯装置2は、人体等の遮蔽物によりRSSI値がしきい値Th2以下になったとしても、歩数がしきい値Th1以上でない場合は、携帯装置2が判定エリア4の外へ出たとの誤判定を抑制することができる。その結果、携帯装置2が判定エリア4内から判定エリア4の外へ出たと判定されるタイミングと、実際に携帯装置2が判定エリア4の外へ出たタイミングと、のばらつきを抑える(判定精度を高くする)ことができる。
Therefore, even if the RSSI value becomes equal to or less than the threshold value Th2 due to a shield such as a human body, the portable device 2 assumes that the portable device 2 has gone outside the determination area 4 if the number of steps is not equal to or greater than the threshold value Th1 Can be suppressed. As a result, variation between the timing at which the mobile device 2 is determined to have moved out of the determination area 4 from within the determination area 4 and the timing at which the mobile device 2 has actually moved out of the determination area 4 is suppressed (determination accuracy). Can be increased).
また、携帯装置2は、車載装置15から送信された車両1の各ドアの開閉状態を表す開閉情報に基づき、車両1のドアのいずれかが開閉されたと判定した場合に、カウントされた歩数をリセットする。そのため、例えば、使用者3が降車後、バックドアを開閉して車両1後部から荷物を降ろした後に車両1を離れる場合であっても、降車してから車両1後部に行くまでの移動の歩数はリセットされ、正味、車両1を離れる移動の歩数のみをカウントすることができる。
Further, when the portable device 2 determines that one of the doors of the vehicle 1 is opened or closed based on the opening / closing information indicating the opened / closed state of each door of the vehicle 1 transmitted from the in-vehicle device 15, the portable device 2 calculates the counted number of steps. Reset. Therefore, for example, even when the user 3 leaves the vehicle 1 after opening and closing the back door and unloading the baggage from the rear of the vehicle 1 after getting off, the number of steps taken until the user 1 goes to the rear of the vehicle 1 Is reset, and only the number of steps of movement leaving the vehicle 1 can be counted.
なお、第1実施形態では、車載装置15及び携帯装置2を備えるシステムが位置検出システムの一例に相当する。また、S203が取得部としての処理の一例に相当し、加速度センサ21が第一の測定部の一例に相当する。また、S205が第一の判定部としての処理の一例に相当する。また、車両1のドアを開閉することが降車の契機となる所定の動作の一例に相当し、車載装置から送信される一連の開閉情報が動作情報の一例に相当する。また、S206が第二の判定部及び第三の判定部としての処理の一例に相当する。また、車両情報が状態情報の一例に相当し、報知要因がない状態が乗員が存在しない場合に実現されるべき所定の状態の一例に相当する。乗員が存在しない場合とは、乗員が非存在の場合とも呼びうる。また、S208が第一の報知部としての処理の一例に相当し、S212が第二の報知部としての処理の一例に相当する。また、S103が動作情報送信部、開閉情報送信部、信号強度送信部及び状態情報送信部としての処理の一例に相当し、通信部151が第三の測定部の一例に相当する。
In the first embodiment, a system including the in-vehicle device 15 and the portable device 2 corresponds to an example of a position detection system. Further, S203 corresponds to an example of processing as an acquisition unit, and the acceleration sensor 21 corresponds to an example of a first measurement unit. S205 corresponds to an example of processing as the first determination unit. Moreover, opening and closing the door of the vehicle 1 corresponds to an example of a predetermined operation that triggers getting off, and a series of opening and closing information transmitted from the in-vehicle device corresponds to an example of operation information. S206 corresponds to an example of processing as the second determination unit and the third determination unit. Further, the vehicle information corresponds to an example of state information, and a state without a notification factor corresponds to an example of a predetermined state that should be realized when no occupant is present. The case where no occupant is present can also be called the case where no occupant is present. S208 corresponds to an example of processing as the first notification unit, and S212 corresponds to an example of processing as the second notification unit. S103 corresponds to an example of processing as an operation information transmission unit, an opening / closing information transmission unit, a signal intensity transmission unit, and a state information transmission unit, and the communication unit 151 corresponds to an example of a third measurement unit.
[2.第2実施形態]
[2-1.構成]
第2実施形態は、基本的な構成は第1実施形態と同様であるため、共通する構成については説明を省略し、相違点を中心に説明する。また、共通する構成には同一の符号を用いる。 [2. Second Embodiment]
[2-1. Constitution]
Since the basic configuration of the second embodiment is the same as that of the first embodiment, the description of the common configuration will be omitted, and the description will focus on the differences. Moreover, the same code | symbol is used for a common structure.
[2-1.構成]
第2実施形態は、基本的な構成は第1実施形態と同様であるため、共通する構成については説明を省略し、相違点を中心に説明する。また、共通する構成には同一の符号を用いる。 [2. Second Embodiment]
[2-1. Constitution]
Since the basic configuration of the second embodiment is the same as that of the first embodiment, the description of the common configuration will be omitted, and the description will focus on the differences. Moreover, the same code | symbol is used for a common structure.
第2実施形態の車両1が備える構成は、第1実施形態と同一である。
The configuration of the vehicle 1 of the second embodiment is the same as that of the first embodiment.
一方、第2実施形態の携帯装置5は、図6に示されるように、加速度センサ21、通信部22、アンテナ23、表示部24、ジャイロセンサ51及び制御部52を備える。つまり、第2実施形態の携帯装置5は、ジャイロセンサ51を更に備える点で、第1実施形態の携帯装置2と相違する。第2実施形態の制御部52は、第1実施形態の制御部25とハードウェア構成は同じであるが、実行する車両情報報知処理が制御部25のものと異なる。
On the other hand, the mobile device 5 of the second embodiment includes an acceleration sensor 21, a communication unit 22, an antenna 23, a display unit 24, a gyro sensor 51, and a control unit 52, as shown in FIG. That is, the mobile device 5 of the second embodiment is different from the mobile device 2 of the first embodiment in that it further includes a gyro sensor 51. The control unit 52 of the second embodiment has the same hardware configuration as the control unit 25 of the first embodiment, but the vehicle information notification process to be executed is different from that of the control unit 25.
ジャイロセンサ51は、携帯装置5の角速度を測定する。例えば、使用者3が携帯装置5を携帯した状態で歩くと、使用者3の動きに伴い携帯装置5の角速度が変化し得る。このように変化し得る角速度がジャイロセンサ51により測定される。
The gyro sensor 51 measures the angular velocity of the portable device 5. For example, when the user 3 walks with the portable device 5 carried, the angular velocity of the portable device 5 may change with the movement of the user 3. The angular velocity that can change in this way is measured by the gyro sensor 51.
制御部52は、第1実施形態の制御部25と同様な機能に加え、ジャイロセンサ51から角速度を取得する機能を備える。また、制御部52は、取得した角速度を積分することで、比較的短い所定時間(例えば100ms)当たりの携帯装置5の角度変化を測定する。制御部52は、加速度、RSSI値、車両情報及び角度変化に基づき、後述する車両情報報知処理を実行する。
The control unit 52 has a function of acquiring an angular velocity from the gyro sensor 51 in addition to the same function as the control unit 25 of the first embodiment. Moreover, the control part 52 measures the angle change of the portable apparatus 5 per relatively short predetermined time (for example, 100 ms) by integrating the acquired angular velocity. The controller 52 executes a vehicle information notification process described later based on the acceleration, the RSSI value, the vehicle information, and the angle change.
[2-2.処理]
次に、携帯装置5の制御部52が実行する車両情報報知処理について説明する。制御部52が実行する車両情報報知処理は、第1実施形態の車両情報報知処理(図4)と判定ロジック(S205)を除き同一である。そのため、以下では、第2実施形態の判定ロジックのみを図7を用いて説明する。 [2-2. processing]
Next, vehicle information notification processing executed by thecontrol unit 52 of the portable device 5 will be described. The vehicle information notification process executed by the controller 52 is the same except for the vehicle information notification process (FIG. 4) of the first embodiment and the determination logic (S205). Therefore, only the determination logic of the second embodiment will be described below with reference to FIG.
次に、携帯装置5の制御部52が実行する車両情報報知処理について説明する。制御部52が実行する車両情報報知処理は、第1実施形態の車両情報報知処理(図4)と判定ロジック(S205)を除き同一である。そのため、以下では、第2実施形態の判定ロジックのみを図7を用いて説明する。 [2-2. processing]
Next, vehicle information notification processing executed by the
図7におけるS401~S404及びS406は、図5におけるS301~S305と同様な処理である。つまり、第2実施形態の判定ロジック(図7)は、S405の処理が追加されている点で、第1実施形態の判定ロジック(図5)と相違する。したがって、S401~S404については、その説明を省略する。
7 are the same processes as S301 to S305 in FIG. That is, the determination logic (FIG. 7) of the second embodiment is different from the determination logic (FIG. 5) of the first embodiment in that the process of S405 is added. Therefore, the description of S401 to S404 is omitted.
制御部52は、S404で歩数がしきい値Th1以上であると判定した場合は(S404:YES)、測定された最新の角度変化がしきい値Th3以下であるか否かを判定する(S405)。しきい値Th3は、例えば、携帯装置5を携帯した使用者3が、方向を変えて移動している場合、換言すれば、直進していない場合にとり得る角度変化を目安に設定される。
When determining that the number of steps is equal to or greater than the threshold value Th1 in S404 (S404: YES), the control unit 52 determines whether or not the latest measured angle change is equal to or less than the threshold value Th3 (S405). ). For example, when the user 3 who carries the portable device 5 is moving in a different direction, in other words, the threshold value Th3 is set based on an angle change that can be taken when the user 3 is not moving straight.
制御部52は、角度変化がしきい値Th3以下であると判定した場合には(S405:YES)、RSSI値がしきい値Th2以下であるか否かを判定する(S406)。制御部52は、RSSI値がしきい値Th2以下であると判定した場合には(S406:YES)、携帯装置5は判定エリア4の外に存在すると判定し、図7の判定ロジックを終了する。
When it is determined that the angle change is equal to or less than the threshold value Th3 (S405: YES), the control unit 52 determines whether the RSSI value is equal to or less than the threshold value Th2 (S406). When the control unit 52 determines that the RSSI value is equal to or less than the threshold value Th2 (S406: YES), the control unit 52 determines that the portable device 5 exists outside the determination area 4, and ends the determination logic of FIG. .
一方、制御部52は、歩数がしきい値Th1以上でないと判定した場合(S404:NO)、又は、角度変化がしきい値Th3以下でないと判定した場合(S405:NO)は、携帯装置5は判定エリア4内に存在すると判定し、図7の判定ロジックを終了する。同様に、制御部52は、RSSI値がしきい値Th2以下でないと判定した場合(S406:NO)は、携帯装置5は判定エリア4内に存在すると判定し、図7の判定ロジックを終了する。
On the other hand, if the control unit 52 determines that the number of steps is not equal to or greater than the threshold value Th1 (S404: NO), or determines that the angle change is not equal to or less than the threshold value Th3 (S405: NO), the mobile device 5 Determines that it exists in the determination area 4 and ends the determination logic of FIG. Similarly, when the control unit 52 determines that the RSSI value is not equal to or less than the threshold value Th2 (S406: NO), the control unit 52 determines that the portable device 5 exists in the determination area 4, and ends the determination logic of FIG. .
[2-3.効果]
以上詳述した第2実施形態によれば、前述した第1実施形態の効果に加え、以下の効果が得られる。 [2-3. effect]
According to the second embodiment described in detail above, the following effects are obtained in addition to the effects of the first embodiment described above.
以上詳述した第2実施形態によれば、前述した第1実施形態の効果に加え、以下の効果が得られる。 [2-3. effect]
According to the second embodiment described in detail above, the following effects are obtained in addition to the effects of the first embodiment described above.
第2実施形態の携帯装置5は、RSSI値と歩数とに加え、携帯装置5の角度変化に基づいて、携帯装置5が判定エリア4内から判定エリア4の外へ出たか否かの判定を行う。
The mobile device 5 of the second embodiment determines whether or not the mobile device 5 has moved out of the determination area 4 from the determination area 4 based on the angle change of the mobile device 5 in addition to the RSSI value and the number of steps. Do.
歩数は、使用者3が車両1を離れない場合であっても、歩いていれば加算される。そのため、使用者3が降車後、判定エリア4の外へ向かって真っ直ぐ歩くのではなく、車両周辺をうろうろするような場合には、判定エリア4内において歩数がしきい値Th1以上になることがある。
The number of steps is added if the user 3 is walking even if the user 3 does not leave the vehicle 1. For this reason, after the user 3 gets off the vehicle, instead of walking straight out of the determination area 4 and walking around the vehicle, the number of steps in the determination area 4 may exceed the threshold Th1. is there.
また、その際、人体等の遮蔽物によりRSSI値がしきい値Th2以下になると、携帯装置5が判定エリア4内に存在するにもかかわらず、歩数がしきい値Th1以上になり、RSSI値がしきい値Th2以下になる。
At that time, if the RSSI value becomes equal to or less than the threshold value Th2 due to a shield such as a human body, the number of steps becomes equal to or more than the threshold value Th1 even though the mobile device 5 exists in the determination area 4, and the RSSI value Falls below the threshold Th2.
しかしながら、第2実施形態の携帯装置5は、上記のような場合でも、角度変化がしきい値Th3以下でない場合(すなわち、使用者3がうろうろし進行方向を頻繁に変える場合)は、当該携帯装置5が判定エリア4内に存在すると判定する。したがって、携帯装置5は、上記のような場合であっても角度変化がしきい値Th3以下でない場合は、当該携帯装置5が判定エリア4の外へ出たとの誤判定を抑制することができる。
However, even in the case described above, the portable device 5 of the second embodiment is not portable when the change in angle is not equal to or less than the threshold value Th3 (that is, when the user 3 frequently changes the direction of travel). It is determined that the device 5 exists in the determination area 4. Therefore, the mobile device 5 can suppress erroneous determination that the mobile device 5 has gone out of the determination area 4 if the angle change is not equal to or less than the threshold Th3 even in the above case. .
なお、第2実施形態中の構成であって第1実施形態と共通する構成については、第1実施形態の構成に相当する。また、第2実施形態では、車載装置15及び携帯装置5を備えるシステムが位置検出システムの一例に相当し、ジャイロセンサ51及び制御部52が第二の測定部の一例に相当する。
The configuration in the second embodiment that is common to the first embodiment corresponds to the configuration in the first embodiment. Moreover, in 2nd Embodiment, the system provided with the vehicle-mounted apparatus 15 and the portable apparatus 5 is equivalent to an example of a position detection system, and the gyro sensor 51 and the control part 52 are equivalent to an example of a 2nd measurement part.
[3.第3実施形態]
[3-1.構成]
第3実施形態のハードウェア構成は、第1実施形態と同一である。すなわち、第3実施形態の車両1が備えるハードウェア構成及び携帯装置2のハードウェア構成は、第1実施形態と同一である。ただし、第3実施形態において実行される車両情報送信処理及び情報送信処理は、第1実施形態のものと異なる。そのため、以下では第3実施形態の車両情報送信処理及び情報送信処理のみを説明する。 [3. Third Embodiment]
[3-1. Constitution]
The hardware configuration of the third embodiment is the same as that of the first embodiment. That is, the hardware configuration of thevehicle 1 of the third embodiment and the hardware configuration of the portable device 2 are the same as those of the first embodiment. However, the vehicle information transmission process and the information transmission process executed in the third embodiment are different from those in the first embodiment. Therefore, only the vehicle information transmission process and the information transmission process of the third embodiment will be described below.
[3-1.構成]
第3実施形態のハードウェア構成は、第1実施形態と同一である。すなわち、第3実施形態の車両1が備えるハードウェア構成及び携帯装置2のハードウェア構成は、第1実施形態と同一である。ただし、第3実施形態において実行される車両情報送信処理及び情報送信処理は、第1実施形態のものと異なる。そのため、以下では第3実施形態の車両情報送信処理及び情報送信処理のみを説明する。 [3. Third Embodiment]
[3-1. Constitution]
The hardware configuration of the third embodiment is the same as that of the first embodiment. That is, the hardware configuration of the
[3-2.処理]
まず、携帯装置2の制御部25が行う車両情報報知処理を図8を用いて説明する。図8におけるS501~S514は、図4におけるS201~S214と同様である。つまり、第3実施形態の車両情報報知処理(図8)は、S515~S516の処理が追加されている点で、第1実施形態の車両情報報知処理(図4)と相違する。したがって、S501~S514については、その説明は省略する。 [3-2. processing]
First, vehicle information notification processing performed by thecontrol unit 25 of the portable device 2 will be described with reference to FIG. S501 to S514 in FIG. 8 are the same as S201 to S214 in FIG. That is, the vehicle information notification process (FIG. 8) of the third embodiment is different from the vehicle information notification process (FIG. 4) of the first embodiment in that the processes of S515 to S516 are added. Therefore, the description of S501 to S514 is omitted.
まず、携帯装置2の制御部25が行う車両情報報知処理を図8を用いて説明する。図8におけるS501~S514は、図4におけるS201~S214と同様である。つまり、第3実施形態の車両情報報知処理(図8)は、S515~S516の処理が追加されている点で、第1実施形態の車両情報報知処理(図4)と相違する。したがって、S501~S514については、その説明は省略する。 [3-2. processing]
First, vehicle information notification processing performed by the
制御部25は、S510にてリンクロスがないと判定すると(S510:NO)、報知要因の中にドアロックのし忘れがあるか否かを判定する(S515)。
When it is determined that there is no link loss in S510 (S510: NO), the control unit 25 determines whether there is forgetting to lock the door among the notification factors (S515).
制御部25は、S515にてドアロックのし忘れがあると判定した場合は(S515:YES)、ドアを施錠する旨の施錠命令を通信部22を介して車載装置15へ送信する(S516)。制御部25は、施錠命令を送信した後、又は、S515にてドアロックのし忘れがないと判定した場合(S515:NO)は、S503に戻り、S503以降の処理を繰り返す。
If it is determined in S515 that the door has been forgotten to be locked (S515: YES), the control unit 25 transmits a locking command for locking the door to the in-vehicle device 15 via the communication unit 22 (S516). . After transmitting the locking command or when determining in S515 that the door is not forgotten to be locked (S515: NO), the control unit 25 returns to S503 and repeats the processing after S503.
次に、車載装置15の制御部152が実行する情報送信処理を図9を用いて説明する。図9におけるS601~S606は、図3におけるS101~S106と同様である。つまり、第3実施形態の情報送信処理(図9)は、S607~S608の処理が追加されている点で、第1実施形態の情報送信処理(図3)と相違する。したがって、S601~S606については、その説明は省略する。
Next, information transmission processing executed by the control unit 152 of the in-vehicle device 15 will be described with reference to FIG. S601 to S606 in FIG. 9 are the same as S101 to S106 in FIG. That is, the information transmission process (FIG. 9) of the third embodiment is different from the information transmission process (FIG. 3) of the first embodiment in that the processes of S607 to S608 are added. Therefore, the description of S601 to S606 is omitted.
制御部152は、S604でリンクロスがないと判定した場合は(S604:NO)、通信部151が施錠命令を受信したか否かを判定する(S607)。制御部152は、通信部151が施錠命令を受信したと判定した場合は(S607:YES)、施錠されていないドアの施錠をドアロックアクチュエータ108に行わせる(S608)。制御部152はS608にてドアを施錠すると、S602に戻り、S602以降の処理を繰り返す。
When it is determined that there is no link loss in S604 (S604: NO), the control unit 152 determines whether the communication unit 151 has received a locking command (S607). When it is determined that the communication unit 151 has received the locking command (S607: YES), the control unit 152 causes the door lock actuator 108 to lock the door that is not locked (S608). If the door is locked in S608, the control unit 152 returns to S602 and repeats the processing from S602 onward.
なお、S608にてドアが施錠されると、S603で送信される車両情報の内容が変わる。すなわち、車両情報の中の車両1の各ドアの施錠開錠状態を表す情報は、各ドアが施錠されていることを表す。また、報知要因がドアロックのし忘れだけである場合は、携帯装置2が車両情報を受信すると、車両情報報知処理(図8)のS506にて報知要因はないと判定されるため、報知は解除される(S512)。
Note that when the door is locked in S608, the content of the vehicle information transmitted in S603 changes. That is, the information indicating the unlocked state of each door of the vehicle 1 in the vehicle information represents that each door is locked. In addition, when the notification factor is only forgetting to lock the door, when the portable device 2 receives the vehicle information, it is determined that there is no notification factor in S506 of the vehicle information notification process (FIG. 8). It is released (S512).
一方、制御部152は、S607にて通信部151が施錠命令を受信していないと判定した場合は(S607:NO)、S605の処理を実行する。
On the other hand, if the control unit 152 determines in S607 that the communication unit 151 has not received the locking command (S607: NO), the control unit 152 executes the process of S605.
[3-3.効果]
以上詳述した第3実施形態によれば、前述した第1実施形態の効果に加え、以下の効果が得られる。 [3-3. effect]
According to the third embodiment described in detail above, the following effects can be obtained in addition to the effects of the first embodiment described above.
以上詳述した第3実施形態によれば、前述した第1実施形態の効果に加え、以下の効果が得られる。 [3-3. effect]
According to the third embodiment described in detail above, the following effects can be obtained in addition to the effects of the first embodiment described above.
第3実施形態では、報知要因がある場合、携帯装置2は、車両1が報知要因が除去された状態、つまり、「し忘れ」が解消された状態へ自動的に遷移可能であるか否かを判定する。なお、上記判定は、ドアロックのし忘れがあるか否かの判定(S515)に対応する。また、携帯装置2は、車両1が報知要因が除去された状態へ自動的に遷移可能であると判定した場合、つまり、ドアロックのし忘れがあると判定した場合は、報知要因が除去された状態への遷移を命じる旨の遷移命令情報(施錠命令)を車両1へ無線送信する。
In the third embodiment, when there is a notification factor, the mobile device 2 can automatically shift the vehicle 1 to a state where the notification factor is removed, that is, a state where "forgetting to do" is eliminated. Determine. Note that the above determination corresponds to the determination (S515) as to whether or not the door lock is forgotten. In addition, when the portable device 2 determines that the vehicle 1 can automatically transition to the state where the notification factor is removed, that is, when it is determined that the door lock is forgotten, the notification factor is removed. Transition command information (locking command) for instructing the transition to the state is wirelessly transmitted to the vehicle 1.
そして、施錠命令を受信した車両1は、施錠されていないドアを施錠する。したがって、第3実施形態では、使用者3が車両1へ戻ることなく、車両1は自動的に報知要因が除去された状態へと遷移することができる。
And the vehicle 1 which received the locking command locks the door which is not locked. Therefore, in 3rd Embodiment, the user 1 can change to the state from which the alerting | reporting factor was removed automatically, without the user 3 returning to the vehicle 1. FIG.
なお、第3実施形態中の構成であって第1実施形態と共通する構成については、第1実施形態の構成に相当する。また、第3実施形態では、S503が取得部としての処理の一例に相当し、S505が第一の判定部としての処理の一例に相当する。また、S506が第二の判定部及び第三の判定部としての処理の一例に相当し、S508が第一の報知部としての処理の一例に相当する。また、S512が第二の報知部としての処理の一例に相当し、S603が動作情報送信部、開閉情報送信部、信号強度送信部及び状態情報送信部としての処理の一例に相当する。また、S515が第四の判定部としての処理の一例に相当し、S516が遷移命令送信部としての処理の一例に相当し、S608が遷移処理部としての処理の一例に相当する。
The configuration in the third embodiment that is common to the first embodiment corresponds to the configuration in the first embodiment. In the third embodiment, S503 corresponds to an example of processing as an acquisition unit, and S505 corresponds to an example of processing as a first determination unit. S506 corresponds to an example of processing as the second determination unit and the third determination unit, and S508 corresponds to an example of processing as the first notification unit. S512 corresponds to an example of processing as a second notification unit, and S603 corresponds to an example of processing as an operation information transmission unit, an opening / closing information transmission unit, a signal strength transmission unit, and a state information transmission unit. Further, S515 corresponds to an example of processing as a fourth determination unit, S516 corresponds to an example of processing as a transition command transmission unit, and S608 corresponds to an example of processing as a transition processing unit.
[4.他の実施形態]
以上、実施形態について説明したが、携帯装置及び位置検出システムは、上記実施形態に限定されることなく、種々の形態を採り得ることは言うまでもない。 [4. Other Embodiments]
Although the embodiments have been described above, it goes without saying that the portable device and the position detection system are not limited to the above-described embodiments and can take various forms.
以上、実施形態について説明したが、携帯装置及び位置検出システムは、上記実施形態に限定されることなく、種々の形態を採り得ることは言うまでもない。 [4. Other Embodiments]
Although the embodiments have been described above, it goes without saying that the portable device and the position detection system are not limited to the above-described embodiments and can take various forms.
上記各実施形態では、制御部25,52が車載装置15との間の無線通信の信号強度を取得するに当たり、車載装置15が信号強度を測定し、測定された信号強度を携帯装置2,5へ送信したが、信号強度の測定は携帯装置2,5で直接行ってもよい。例えば、通信部22が信号強度を測定し、制御部25,52が通信部22から信号強度を取得してもよい。
In each said embodiment, when the control parts 25 and 52 acquire the signal strength of the radio | wireless communication between the vehicle-mounted apparatuses 15, the vehicle-mounted apparatus 15 measures a signal strength and uses the measured signal strength for the portable apparatuses 2 and 5. However, the signal strength may be measured directly by the portable devices 2 and 5. For example, the communication unit 22 may measure the signal strength, and the control units 25 and 52 may acquire the signal strength from the communication unit 22.
上記各実施形態では、携帯装置2,5が行う車両情報報知処理は、携帯装置2,5において、専用のアプリケーションが起動されることにより開始されたが、上記アプリケーションはバックグラウンドで作動していてもよい。また、使用者3が上記アプリケーションを起動させるための起動操作をしなくても、上記アプリケーションが起動するようにしてもよい。例えば、携帯装置2,5のオペレーティングシステムが起動されることにより起動されてもよい。
In each said embodiment, although the vehicle information alerting | reporting process which the portable apparatuses 2 and 5 perform was started by starting a dedicated application in the portable apparatuses 2 and 5, the said application is operating in the background. Also good. Further, the application may be activated without the user 3 performing an activation operation for activating the application. For example, it may be started by starting the operating system of the mobile devices 2 and 5.
また、上記各実施形態では、携帯装置2,5の加速度に基づいて携帯装置2,5と車両1との間の距離が推定されるに当たり、使用者3の歩数が用いられたが、加速度に基づく量であって歩数以外の量を用いて距離が推定されてもよい。
Moreover, in each said embodiment, when estimating the distance between the portable apparatuses 2 and 5 and the vehicle 1 based on the acceleration of the portable apparatuses 2 and 5, the number of steps of the user 3 was used. The distance may be estimated using an amount based on the amount other than the number of steps.
また、上記各実施形態では、使用者3の降車の契機となる所定の動作は、使用者3が車両1を降りる際に車両1のドアを開閉する動作であったが、上記所定の動作は、これに限定されるものではない。例えば、上記所定の動作は、使用者3が降車時に運転席を立つ動作であってもよい。その場合、運転席は着座センサを備え、運転席を立つ動作は着座センサにより検出されてもよい。
Moreover, in each said embodiment, although the predetermined operation | movement used as the opportunity of the user 3 getting off was an operation | movement which opens and closes the door of the vehicle 1 when the user 3 gets off the vehicle 1, the said predetermined operation | movement is However, the present invention is not limited to this. For example, the predetermined operation may be an operation in which the user 3 stands on the driver's seat when getting off the vehicle. In that case, the driver's seat may be provided with a seating sensor, and the motion of standing up the driver's seat may be detected by the seating sensor.
また、上記第2実施形態の判定ロジック(図7)では、角度変化の瞬時値(測定された最新の角度変化)が用いられたが、角度変化の積算値が用いられてもよい。角度変化の積算値としては、例えば、使用者3が車両1を降車してからの積算値が考えられる。
In the determination logic (FIG. 7) of the second embodiment, the instantaneous value of the angle change (the latest measured angle change) is used, but the integrated value of the angle change may be used. As the integrated value of the angle change, for example, an integrated value after the user 3 gets off the vehicle 1 can be considered.
また、第2実施形態の判定ロジック(図7)の変形例は、例えば、角度変化に応じて歩数のしきい値Th1が変化するといった要件を備える判定ロジックや角度変化に応じてカウントされた歩数が減少又はリセットされるといった要件を備える判定ロジックであってもよい。
The modification of the determination logic (FIG. 7) according to the second embodiment is, for example, determination logic having a requirement that the threshold value Th1 of the number of steps changes according to an angle change or the number of steps counted according to the angle change. It may be a determination logic having a requirement that is reduced or reset.
また、上記第3実施形態では、報知要因の中にドアロックのし忘れがあるか否かの判定(S515)は携帯装置2側で行われたが、上記判定は車両1側で行われてもよい。すなわち、制御部152が上記判定を行い、ドアロックのし忘れがあると判定した場合はドアロックアクチュエータ108に施錠させてもよい。なお、この場合、ドアロックのし忘れ以外にも報知要因があるときは、制御部152は、報知要因がある旨の情報を通信部151を介して携帯装置2へ無線送信する。
Moreover, in the said 3rd Embodiment, although the determination (S515) of whether there is forgetting to lock a door among notification factors was performed by the portable apparatus 2 side, the said determination is performed by the vehicle 1 side. Also good. That is, when the control unit 152 performs the above determination and determines that the door lock is forgotten, the door lock actuator 108 may be locked. In this case, when there is a notification factor other than forgetting to lock the door, the control unit 152 wirelessly transmits information to the effect that there is a notification factor to the portable device 2 via the communication unit 151.
また、上記第3実施形態では、車両1側で自動的に除去可能な報知要因はドアロックのし忘れとしたが、報知要因はこれに限定されない。例えば、ドアロックのし忘れに代えて、又は、ドアロックのし忘れに加えて、窓の閉め忘れも自動的に除去されるようにしてもよい。
In the third embodiment, the notification factor that can be automatically removed on the vehicle 1 side is forgotten to lock the door, but the notification factor is not limited to this. For example, instead of forgetting to lock the door or in addition to forgetting to lock the door, forgetting to close the window may be automatically removed.
また、上記第2実施形態において、報知要因の中に車両1側で自動的に除去可能な報知要因がある場合は車両1に報知要因を除去させてもよい。すなわち、第2実施形態において、車載装置15の制御部152が行う図3の情報送信処理を図9の情報送信処理に変更し、携帯装置5の制御部52が行う図4の車両情報報知処理を図8の車両情報報知処理に変更してもよい。なお、この場合、車両情報報知処理の判定ロジック(S505)は、図7の判定ロジックである。
In the second embodiment, when there is a notification factor that can be automatically removed on the vehicle 1 side in the notification factor, the vehicle 1 may be caused to remove the notification factor. That is, in 2nd Embodiment, the information transmission process of FIG. 3 which the control part 152 of the vehicle-mounted apparatus 15 performs is changed into the information transmission process of FIG. 9, and the vehicle information alerting | reporting process of FIG. May be changed to the vehicle information notification process of FIG. In this case, the determination logic (S505) of the vehicle information notification process is the determination logic of FIG.
また、上記各実施形態では、携帯装置2,5は、全ての報知要因が除去された場合には報知を解除すること、すなわち、報知形態を変化させることにより車両1が報知要因のない状態になったことを使用者3に報知した。しかし、携帯装置2,5は、例えば、報知要因が解消された旨を文字等の画像として表示部24に表示すること等により車両1が報知要因のない状態になったことを使用者3に報知してもよい。
Moreover, in each said embodiment, the portable apparatuses 2 and 5 cancel | release alerting | reporting, when all the alerting factors are removed, ie, change the alerting | reporting form, and the vehicle 1 will be in the state without alerting | reporting factor. The user 3 was notified that it became. However, the portable devices 2 and 5 indicate to the user 3 that the vehicle 1 is in a state where there is no notification factor, for example, by displaying on the display unit 24 as an image such as a character that the notification factor has been eliminated. You may notify.
上記実施形態における1つの構成要素が有する機能を複数の構成要素として分散させたり、複数の構成要素が有する機能を1つの構成要素に統合したりしてもよい。また、上記実施形態の構成の少なくとも一部を、同様の機能を有する公知の構成に置き換えてもよい。また、上記実施形態の構成の一部を、課題を解決できる限りにおいて省略してもよい。また、上記実施形態の構成の少なくとも一部を、他の上記実施形態の構成に対して付加、置換等してもよい。
The functions of one component in the above embodiment may be distributed as a plurality of components, or the functions of a plurality of components may be integrated into one component. Further, at least a part of the configuration of the above embodiment may be replaced with a known configuration having the same function. Moreover, you may abbreviate | omit a part of structure of the said embodiment as long as a subject can be solved. In addition, at least a part of the configuration of the above embodiment may be added to or replaced with the configuration of the other embodiment.
この出願に記載されるフローチャート、あるいは、フローチャートの処理は、複数のステップ(あるいはセクションと言及される)から構成され、各ステップは、たとえば、S101と表現される。さらに、各ステップは、複数のサブステップに分割されることができる、一方、複数のステップが合わさって一つのステップにすることも可能である。
The flowchart described in this application or the process of the flowchart is composed of a plurality of steps (or referred to as sections), and each step is expressed as S101, for example. Further, each step can be divided into a plurality of sub-steps, while a plurality of steps can be combined into one step.
以上、携帯装置及び位置検出システムの実施形態、構成、態様を例示したが、実施形態、構成、態様は、上述した各実施形態、各構成、各態様に限定されるものではない。例えば、異なる実施形態、構成、態様にそれぞれ開示された技術的部を適宜組み合わせて得られる実施形態、構成、態様についても携帯装置及び位置検出システムに係わる実施形態、構成、態様の範囲に含まれる。
As described above, the embodiments, configurations, and aspects of the portable device and the position detection system have been illustrated, but the embodiments, configurations, and aspects are not limited to the above-described embodiments, configurations, and aspects. For example, embodiments, configurations, and aspects obtained by appropriately combining technical units disclosed in different embodiments, configurations, and aspects are also included in the scope of the embodiments, configurations, and aspects related to the portable device and the position detection system. .
Claims (15)
- 車両(1)に搭載された車載装置(15)と無線通信を行う携帯装置(2,5)であって、
前記携帯装置と前記車載装置との間の無線通信の信号強度を取得する取得部(S203,S503)と、
当該携帯装置の加速度を測定する第一の測定部(21)と、
前記取得部により取得された前記信号強度と、前記第一の測定部により測定された前記加速度と、に基づき、当該携帯装置が前記車両周辺の判定エリア(4)内に存在するか否かを判定する第一の判定部(S205,S505)と、
を備え、
前記第一の判定部は、前記加速度に基づき、当該携帯装置と前記車両との間の距離を推定し、前記距離が第一のしきい値以上であり、かつ、前記信号強度が第二のしきい値以下である場合に、当該携帯装置が前記判定エリア内に存在しないと判定する、携帯装置。 A portable device (2, 5) for performing wireless communication with an in-vehicle device (15) mounted on a vehicle (1),
An acquisition unit (S203, S503) for acquiring signal strength of wireless communication between the portable device and the in-vehicle device;
A first measurement unit (21) for measuring the acceleration of the portable device;
Based on the signal intensity acquired by the acquisition unit and the acceleration measured by the first measurement unit, whether or not the portable device exists in the determination area (4) around the vehicle. A first determination unit (S205, S505) for determination;
With
The first determination unit estimates a distance between the portable device and the vehicle based on the acceleration, the distance is equal to or greater than a first threshold value, and the signal strength is a second value. A portable device that determines that the portable device does not exist in the determination area when the threshold is equal to or less than a threshold value. - 請求項1に記載の携帯装置であって、
前記車載装置は、当該携帯装置の使用者(3)が降車の契機となる所定の動作を行ったか否かを表す動作情報を送信し、
前記第一の判定部は、前記加速度に基づき当該携帯装置の使用者の移動量の積算値を測定し、前記車載装置からの前記動作情報をもとに前記所定の動作を当該携帯装置の使用者が行ったと判定した場合には前記積算値をリセットし、最後のリセットからの前記積算値に基づき当該携帯装置と前記車両との間の距離を推定する、携帯装置。 The portable device according to claim 1,
The in-vehicle device transmits operation information indicating whether or not the user (3) of the portable device has performed a predetermined operation that triggers getting off,
The first determination unit measures an integrated value of a movement amount of a user of the portable device based on the acceleration, and uses the predetermined operation based on the operation information from the in-vehicle device. A portable device that resets the integrated value when it is determined that the person has performed, and estimates the distance between the portable device and the vehicle based on the integrated value from the last reset. - 請求項1又は請求項2に記載の携帯装置であって、
前記車載装置は、前記車両に設けられたドアの開閉状態を表す開閉情報を送信し、
前記第一の判定部は、前記加速度に基づき当該携帯装置の使用者の移動量の積算値を測定し、前記車載装置からの前記開閉情報をもとに前記ドアが開閉されたと判定した場合には前記積算値をリセットし、最後のリセットからの前記積算値に基づき当該携帯装置と前記車両との間の距離を推定する、携帯装置。 A portable device according to claim 1 or claim 2,
The in-vehicle device transmits opening / closing information representing an opening / closing state of a door provided in the vehicle,
The first determination unit measures an integrated value of a movement amount of a user of the portable device based on the acceleration, and determines that the door has been opened / closed based on the opening / closing information from the in-vehicle device. Is a portable device that resets the integrated value and estimates the distance between the portable device and the vehicle based on the integrated value from the last reset. - 請求項1から請求項3までのいずれか1項に記載の携帯装置であって、
当該携帯装置の角度変化を測定する第二の測定部(51,52)を更に備え、
前記第一の判定部は、前記距離が第一のしきい値以上であり、かつ、前記信号強度が第二のしきい値以下であっても、前記角度変化に応じて、当該携帯装置が前記判定エリア内に存在すると判定する、携帯装置。 A portable device according to any one of claims 1 to 3,
A second measuring unit (51, 52) for measuring a change in angle of the portable device;
In the first determination unit, even if the distance is greater than or equal to a first threshold and the signal strength is less than or equal to a second threshold, the portable device A portable device that determines to be in the determination area. - 請求項4に記載の携帯装置であって、
前記第一の判定部は、前記距離が第一のしきい値以上であり、かつ、前記信号強度が第二のしきい値以下であり、かつ、前記角度変化が第三のしきい値以下である場合に当該携帯装置が前記判定エリア内に存在しないと判定する、携帯装置。 The portable device according to claim 4,
In the first determination unit, the distance is greater than or equal to a first threshold, the signal intensity is less than or equal to a second threshold, and the angle change is less than or equal to a third threshold. A portable device that determines that the portable device does not exist within the determination area. - 請求項1から請求項5までのいずれか1項に記載の携帯装置であって、
前記第一の判定部により当該携帯装置が前記判定エリア内に存在しないと判定された場合に、前記車載装置から送信された前記車両の状態を表す状態情報に基づき、前記車両の状態が、乗員が存在しない場合に実現されるべき所定の状態であるか否かを判定する第二の判定部(S206,S506)と、
前記車両の状態が前記所定の状態でないと前記第二の判定部により判定された場合に、当該携帯装置の使用者に報知する第一の報知部(S208,S508)と、
を更に備える携帯装置。 A portable device according to any one of claims 1 to 5,
When the first determination unit determines that the portable device does not exist in the determination area, the vehicle state is determined based on the state information indicating the vehicle state transmitted from the in-vehicle device. A second determination unit (S206, S506) for determining whether or not a predetermined state to be realized when there is no
A first notification unit (S208, S508) for notifying the user of the portable device when the second determination unit determines that the state of the vehicle is not the predetermined state;
A portable device further comprising: - 請求項6に記載の携帯装置であって、
前記第二の判定部により前記車両の状態が前記所定の状態でないと判定された後に前記車載装置から送信された前記状態情報に基づき、前記車両の状態が前記所定の状態であるか否かを判定する第三の判定部(S206,S506)と、
前記車両の状態が前記所定の状態であると前記第三の判定部により判定された場合に、当該携帯装置の使用者に報知する第二の報知部(S212,S512)と、
を更に備える携帯装置。 The portable device according to claim 6,
Whether the state of the vehicle is the predetermined state based on the state information transmitted from the in-vehicle device after the second determination unit determines that the state of the vehicle is not the predetermined state. A third determination unit (S206, S506) for determination;
A second notification unit (S212, S512) for notifying the user of the portable device when the third determination unit determines that the state of the vehicle is the predetermined state;
A portable device further comprising: - 請求項6又は請求項7に記載の携帯装置であって、
前記車両の状態が前記所定の状態でないと前記第二の判定部により判定された場合に、当該携帯装置の使用者が前記車両へ戻ることなく前記車両側で自動的に前記所定の状態へ遷移可能であるか否かを判定する第四の判定部(S515)と、
前記車両側で自動的に前記所定の状態へ遷移可能であると前記第四の判定部により判定された場合に、前記車両に前記所定の状態への遷移を命じる旨の遷移命令情報を送信する遷移命令送信部(S516)と、
を更に備える携帯装置。 A portable device according to claim 6 or claim 7,
When the second determination unit determines that the state of the vehicle is not the predetermined state, the user of the portable device automatically transitions to the predetermined state on the vehicle side without returning to the vehicle. A fourth determination unit (S515) for determining whether it is possible;
When the fourth determination unit determines that the vehicle can automatically shift to the predetermined state, it transmits transition command information for instructing the vehicle to shift to the predetermined state. A transition command transmission unit (S516);
A portable device further comprising: - 車両(1)に搭載された車載装置(15)と、前記車載装置と無線通信を行う携帯装置(2,5)と、を備える位置検出システムであって、
前記携帯装置は、
前記車載装置との間の無線通信の信号強度を取得する取得部(S203,S503)と、
当該携帯装置の加速度を測定する第一の測定部(21)と、
前記取得部により取得された前記信号強度と、前記第一の測定部により測定された前記加速度と、に基づき、当該携帯装置が前記車両周辺の判定エリア(4)内に存在するか否かを判定する第一の判定部(S205,S505)と、
を備え、
前記第一の判定部は、前記加速度に基づき、当該携帯装置と前記車両との間の距離を推定し、前記距離が第一のしきい値以上であり、かつ、前記信号強度が第二のしきい値以下である場合に、当該携帯装置が前記判定エリア内に存在しないと判定する、位置検出システム。 A position detection system comprising an in-vehicle device (15) mounted on a vehicle (1) and a portable device (2, 5) that performs wireless communication with the in-vehicle device,
The portable device is:
An acquisition unit (S203, S503) for acquiring signal strength of wireless communication with the in-vehicle device;
A first measurement unit (21) for measuring the acceleration of the portable device;
Based on the signal intensity acquired by the acquisition unit and the acceleration measured by the first measurement unit, whether or not the portable device exists in the determination area (4) around the vehicle. A first determination unit (S205, S505) for determination;
With
The first determination unit estimates a distance between the portable device and the vehicle based on the acceleration, the distance is equal to or greater than a first threshold value, and the signal strength is a second value. The position detection system which determines with the said portable apparatus not existing in the said determination area when it is below a threshold value. - 請求項9に記載の位置検出システムであって、
前記車載装置は、前記携帯装置の使用者(3)が降車の契機となる所定の動作を行ったか否かを表す動作情報を送信する動作情報送信部(S103,S603)を更に備え、
前記第一の判定部は、前記加速度に基づき当該携帯装置の使用者の移動量の積算値を測定し、前記車載装置からの前記動作情報をもとに前記所定の動作を当該携帯装置の使用者が行ったと判定した場合には前記積算値をリセットし、最後のリセットからの前記積算値に基づき当該携帯装置と前記車両との間の距離を推定する、位置検出システム。 The position detection system according to claim 9,
The in-vehicle device further includes an operation information transmission unit (S103, S603) that transmits operation information indicating whether or not the user (3) of the portable device has performed a predetermined operation that triggers getting off,
The first determination unit measures an integrated value of a movement amount of a user of the portable device based on the acceleration, and uses the predetermined operation based on the operation information from the in-vehicle device. A position detection system that resets the integrated value when it is determined that the person has performed, and estimates the distance between the portable device and the vehicle based on the integrated value from the last reset. - 請求項9又は請求項10に記載の位置検出システムであって、
前記車載装置は、前記車両に設けられたドアの開閉状態を表す開閉情報を送信する開閉情報送信部(S103,S603)を更に備え、
前記第一の判定部は、前記加速度に基づき当該携帯装置の使用者の移動量の積算値を測定し、前記車載装置からの前記開閉情報をもとに前記ドアが開閉されたと判定した場合には前記積算値をリセットし、最後のリセットからの前記積算値に基づき当該携帯装置と前記車両との間の距離を推定する、位置検出システム。 The position detection system according to claim 9 or 10,
The in-vehicle device further includes an opening / closing information transmitting unit (S103, S603) that transmits opening / closing information indicating an opening / closing state of a door provided in the vehicle,
The first determination unit measures an integrated value of a movement amount of a user of the portable device based on the acceleration, and determines that the door has been opened / closed based on the opening / closing information from the in-vehicle device. Is a position detection system that resets the integrated value and estimates the distance between the portable device and the vehicle based on the integrated value from the last reset. - 請求項9から請求項11までのいずれか1項に記載の位置検出システムであって、
前記車載装置は、
前記携帯装置との間の無線通信の信号強度を測定する第三の測定部(151)と、
前記第三の測定部により測定された前記信号強度を送信する信号強度送信部(S103,S603)と、
を更に備え、
前記取得部は、前記信号強度送信部により送信された前記信号強度を、前記車載装置との間の無線通信の信号強度として取得する、位置検出システム。 The position detection system according to any one of claims 9 to 11,
The in-vehicle device is
A third measuring unit (151) for measuring signal strength of wireless communication with the portable device;
A signal strength transmitter (S103, S603) for transmitting the signal strength measured by the third measuring unit;
Further comprising
The said acquisition part is a position detection system which acquires the said signal strength transmitted by the said signal strength transmission part as signal strength of the radio | wireless communication between the said vehicle-mounted apparatuses. - 請求項9から請求項12までのいずれか1項に記載の位置検出システムであって、
前記車載装置は、前記車両の状態を表す状態情報を送信する状態情報送信部(S103,S603)を更に備え、
前記携帯装置は、
前記第一の判定部により当該携帯装置が前記判定エリア内に存在しないと判定された場合に、前記車載装置からの前記状態情報に基づき、前記車両の状態が、乗員が存在しない場合に実現されるべき所定の状態であるか否かを判定する第二の判定部(S206,S506)と、
前記車両の状態が前記所定の状態でないと前記第二の判定部により判定された場合に、当該携帯装置の使用者に報知する第一の報知部(S208,S508)と、
を更に備える位置検出システム。 A position detection system according to any one of claims 9 to 12,
The in-vehicle device further includes a state information transmission unit (S103, S603) that transmits state information indicating the state of the vehicle,
The portable device is:
When the first determination unit determines that the portable device does not exist in the determination area, the vehicle state is realized based on the state information from the in-vehicle device when no occupant is present. A second determination unit (S206, S506) for determining whether or not the predetermined state should be satisfied;
A first notification unit (S208, S508) for notifying the user of the portable device when the second determination unit determines that the state of the vehicle is not the predetermined state;
A position detection system further comprising: - 請求項13に記載の位置検出システムであって、
前記携帯装置は、
前記第二の判定部により前記車両の状態が前記所定の状態でないと判定された後に前記車載装置から送信された前記状態情報に基づき、前記車両の状態が前記所定の状態であるか否かを判定する第三の判定部(S206,S506)と、
前記車両の状態が前記所定の状態であると前記第三の判定部により判定された場合に、当該携帯装置の使用者に報知する第二の報知部(S212,S512)と、
を更に備える位置検出システム。 The position detection system according to claim 13,
The portable device is:
Whether the state of the vehicle is the predetermined state based on the state information transmitted from the in-vehicle device after the second determination unit determines that the state of the vehicle is not the predetermined state. A third determination unit (S206, S506) for determination;
A second notification unit (S212, S512) for notifying the user of the portable device when the third determination unit determines that the state of the vehicle is the predetermined state;
A position detection system further comprising: - 請求項13又は請求項14に記載の位置検出システムであって、
前記携帯装置は、
前記車両の状態が前記所定の状態でないと前記第二の判定部により判定された場合に、当該携帯装置の使用者が前記車両へ戻ることなく前記車両側で自動的に前記所定の状態へ遷移可能であるか否かを判定する第四の判定部(S515)と、
前記車両側で自動的に前記所定の状態へ遷移可能であると前記第四の判定部により判定された場合に、前記車両に前記所定の状態への遷移を命じる旨の遷移命令情報を送信する遷移命令送信部(S516)と、
を更に備え、
前記車載装置は、
前記携帯装置からの前記遷移命令情報に基づき、前記車両の状態を前記所定の状態へ遷移させるための処理を行う遷移処理部(S608)と、
を更に備える位置検出システム。
The position detection system according to claim 13 or 14,
The portable device is:
When the second determination unit determines that the state of the vehicle is not the predetermined state, the user of the portable device automatically transitions to the predetermined state on the vehicle side without returning to the vehicle. A fourth determination unit (S515) for determining whether it is possible;
When the fourth determination unit determines that the vehicle can automatically shift to the predetermined state, it transmits transition command information for instructing the vehicle to shift to the predetermined state. A transition command transmission unit (S516);
Further comprising
The in-vehicle device is
A transition processing unit (S608) that performs processing for transitioning the state of the vehicle to the predetermined state based on the transition command information from the portable device;
A position detection system further comprising:
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014-138074 | 2014-07-03 | ||
| JP2014138074A JP6233213B2 (en) | 2014-07-03 | 2014-07-03 | Portable device and position detection system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016002131A1 true WO2016002131A1 (en) | 2016-01-07 |
Family
ID=55018714
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/002720 WO2016002131A1 (en) | 2014-07-03 | 2015-05-29 | Portable device and position detection system |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6233213B2 (en) |
| WO (1) | WO2016002131A1 (en) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10539668B2 (en) * | 2016-02-26 | 2020-01-21 | Sony Corporation | Positioning device, communication device, and positioning system for reduction of power consumption |
| DE102016213867B4 (en) * | 2016-07-28 | 2022-12-29 | Continental Automotive Technologies GmbH | Method and device for distance measurement |
| JP6839522B2 (en) * | 2016-11-01 | 2021-03-10 | 株式会社東海理化電機製作所 | Vehicle door lock device |
| JP6754314B2 (en) * | 2017-03-16 | 2020-09-09 | 本田技研工業株式会社 | Notification system and notification method |
| JP2018188883A (en) * | 2017-05-09 | 2018-11-29 | 株式会社デンソー | Vehicle door unlocking system and vehicle door unlocking method |
| JP2019100797A (en) * | 2017-11-30 | 2019-06-24 | 株式会社オートネットワーク技術研究所 | On-vehicle device, position estimation method and computer program |
| JP7262948B2 (en) * | 2018-09-09 | 2023-04-24 | 株式会社ネクスティエレクトロニクス | Portable device, communication control method applied to portable device |
| JP7342627B2 (en) * | 2019-11-05 | 2023-09-12 | 株式会社デンソー | vehicle control system |
| JP7046900B2 (en) * | 2019-12-17 | 2022-04-04 | 本田技研工業株式会社 | Position measurement system, position measurement method, position measurement instruction method, position measurement instruction program, and vehicle control device |
| WO2023277023A1 (en) * | 2021-07-02 | 2023-01-05 | ミネベアミツミ株式会社 | Lock control system, program, terminal device, and lock control method |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008095441A (en) * | 2006-10-13 | 2008-04-24 | Toyota Motor Corp | Vehicle security system |
| JP2010275701A (en) * | 2009-05-26 | 2010-12-09 | Tokai Rika Co Ltd | Electronic key |
| JP2012067463A (en) * | 2010-09-21 | 2012-04-05 | Tokai Rika Co Ltd | Electronic key system |
| JP2013133623A (en) * | 2011-12-26 | 2013-07-08 | Mitsubishi Electric Corp | Keyless entry system, on-vehicle machine and portable machine |
| WO2014171081A1 (en) * | 2013-04-15 | 2014-10-23 | 株式会社デンソー | Position detection device of mobile terminal |
-
2014
- 2014-07-03 JP JP2014138074A patent/JP6233213B2/en not_active Expired - Fee Related
-
2015
- 2015-05-29 WO PCT/JP2015/002720 patent/WO2016002131A1/en active Application Filing
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008095441A (en) * | 2006-10-13 | 2008-04-24 | Toyota Motor Corp | Vehicle security system |
| JP2010275701A (en) * | 2009-05-26 | 2010-12-09 | Tokai Rika Co Ltd | Electronic key |
| JP2012067463A (en) * | 2010-09-21 | 2012-04-05 | Tokai Rika Co Ltd | Electronic key system |
| JP2013133623A (en) * | 2011-12-26 | 2013-07-08 | Mitsubishi Electric Corp | Keyless entry system, on-vehicle machine and portable machine |
| WO2014171081A1 (en) * | 2013-04-15 | 2014-10-23 | 株式会社デンソー | Position detection device of mobile terminal |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6233213B2 (en) | 2017-11-22 |
| JP2016014638A (en) | 2016-01-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6233213B2 (en) | Portable device and position detection system | |
| JP6167690B2 (en) | Vehicle interior monitoring device | |
| JP6520800B2 (en) | Occupant information acquisition system | |
| JP5327149B2 (en) | In-vehicle communication device | |
| JP6754314B2 (en) | Notification system and notification method | |
| US9533576B2 (en) | Control of a user equipment based on in-vehicle position | |
| CN104584594B (en) | Vehicular communication device | |
| US9981598B2 (en) | Alighting notification device | |
| KR20230113291A (en) | Radio frequency sensing in the vehicular environment | |
| US20160159279A1 (en) | Alert system for user of vehicle | |
| EP3023943B1 (en) | Controller, control method, and computer-readable recording medium | |
| JP2016088201A (en) | Halt-time vehicle control unit | |
| US20160086491A1 (en) | System and method for assisting emergency situation for drivers using wearable smart device | |
| WO2016170610A1 (en) | Onboard device, portable terminal, and emergency notification system | |
| JP2017224049A (en) | On-vehicle device and notification method | |
| WO2016007407A1 (en) | Object detection for vehicles | |
| JP6444575B2 (en) | In-vehicle device, notification system, and notification method | |
| JP2011111070A (en) | Device, system, and method of detecting approaching object | |
| KR20150042477A (en) | System and Method for Providing Black Box Function Using Wire and Wireless Gateway | |
| WO2014208012A1 (en) | Communication device for vehicle | |
| JP5897096B1 (en) | Vehicle travel support communication device and communication system | |
| JP2018206186A (en) | Pedestrian terminal device, on-vehicle terminal device, pedestrian-vehicle communication system, and alighting notification method | |
| KR101647625B1 (en) | Bus terminal having checking function to image in vehicle and system for Bus safety therefor | |
| JP2018157360A (en) | Vehicle control system and vehicle control method | |
| JP2008234177A (en) | Emergency notification device for vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15814439 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 15814439 Country of ref document: EP Kind code of ref document: A1 |