WO2015072062A1 - X線画像処理装置、x線画像処理方法、及びプログラム - Google Patents
X線画像処理装置、x線画像処理方法、及びプログラム Download PDFInfo
- Publication number
- WO2015072062A1 WO2015072062A1 PCT/JP2014/004977 JP2014004977W WO2015072062A1 WO 2015072062 A1 WO2015072062 A1 WO 2015072062A1 JP 2014004977 W JP2014004977 W JP 2014004977W WO 2015072062 A1 WO2015072062 A1 WO 2015072062A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- image
- pixel
- difference
- processing
- region
- Prior art date
Links
Images









Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/30—Determination of transform parameters for the alignment of images, i.e. image registration
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus for radiation diagnosis, e.g. combined with radiation therapy equipment
- A61B6/48—Diagnostic techniques
- A61B6/481—Diagnostic techniques involving the use of contrast agents
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus for radiation diagnosis, e.g. combined with radiation therapy equipment
- A61B6/50—Clinical applications
- A61B6/504—Clinical applications involving diagnosis of blood vessels, e.g. by angiography
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0012—Biomedical image inspection
- G06T7/0014—Biomedical image inspection using an image reference approach
- G06T7/0016—Biomedical image inspection using an image reference approach involving temporal comparison
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10116—X-ray image
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20212—Image combination
- G06T2207/20224—Image subtraction
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
- G06T2207/30101—Blood vessel; Artery; Vein; Vascular
Definitions
- the present invention relates to an X-ray image processing apparatus, an X-ray image processing method, and a program.
- DSA digital subtraction angiography
- the DSA image is an image obtained by acquiring images before and after the contrast agent flows into the subject, and subtracting the image before the contrast agent inflow (mask image) from the image after the contrast agent inflow (live image).
- the difference process between images that obtains a difference between a live image and a mask image is to acquire a blood vessel region that is a region of interest in diagnosis as a change region between images due to the inflow of a contrast agent.
- the inter-image difference process removes a region other than the blood vessel region that is the region of interest as a background region.
- the DSA image generated thereby is a diagnostically useful image because the blood vessel region that is the region of interest can be observed without being affected by the subject structure.
- the purpose of diagnosis of DSA images is to clearly display a contrasted blood vessel image. This purpose is fulfilled by subtracting the mask image from the live image, but generally a subject is subject to movement, and thus appears as a motion artifact in the DSA image.
- motion artifacts hinder clear rendering of the blood vessel image.
- stenosis of the blood vessel becomes very difficult to see.
- Patent Document 1 discloses a technique in which a region of interest is determined based on motion artifacts in a subtraction image obtained by subtracting a mask image from a live image, and alignment by pixel shift is limited to the region of interest. ing.
- the alignment by pixel shift is a technique for reducing motion artifacts by shifting the difference pixel to the upper, lower, left or right when performing the inter-image difference between the live image and the mask image.
- the pixel shift amount is calculated from the region of interest determined based on the motion artifact, thereby automatically reducing the effective motion artifact.
- Patent Document 1 focuses on the reduction of motion artifacts, and does not state that the region of clinical interest is the region of interest.
- the present invention provides an X-ray image processing technique capable of aligning a live image and a mask image using a contrasted blood vessel region of clinical interest and its peripheral region in the alignment processing of a DSA image. To do.
- An X-ray image processing apparatus performs a difference process between a mask image obtained by imaging a subject before inflow of a contrast agent and a live image after inflow of a contrast agent, thereby obtaining a first difference image.
- First difference processing means to generate; Using a distribution of pixel values in the first difference image, a first acquisition processing means for acquiring a linear region indicating a region into which a contrast agent has flowed; Second acquisition processing means for acquiring a peripheral region of the linear region from the first difference image using a pixel value of a pixel adjacent to the linear region; Alignment processing means for performing alignment between pixels of the live image and the mask image by comparing the positions using the linear region and the peripheral region.
- the present invention it is possible to align the live image and the mask image using the contrasted blood vessel region of clinical interest and its peripheral region in the alignment process for the DSA image.
- the effect of motion artifacts in the DSA image can be reduced, and the live image and the mask image can be aligned.
- the accompanying drawings are included in the specification, constitute a part thereof, show an embodiment of the present invention, and are used to explain the principle of the present invention together with the description.
- region acquisition process concerning 2nd Embodiment. 1 is a diagram illustrating an example of a system using an X-ray image processing apparatus according to an embodiment.
- the figure which shows the difference between images by the 1st image difference process part exemplarily.
- FIG. 1 is a diagram illustrating a schematic configuration of an image processing apparatus (hereinafter, “X-ray image processing apparatus 100”) according to an embodiment.
- the X-ray image processing apparatus 100 includes an X-ray generation unit 101, a two-dimensional X-ray sensor 104, a preprocessing unit 105, an image storage unit 106, an operation unit 107, an image processing unit 108, and a display unit 109.
- the X-ray generator 101 can generate 3 to 30 X-ray pulses per second.
- the two-dimensional X-ray sensor 104 receives the X-ray 103 transmitted through the subject 102 and captures a moving image synchronized with the X-ray pulse as an X-ray image.
- the two-dimensional X-ray sensor 104 functions as an imaging unit that captures a moving image of the subject 102 irradiated with X-rays.
- the preprocessing unit 105 performs preprocessing on each frame of a moving image captured by the two-dimensional X-ray sensor 104 at different timings.
- the image processing unit 108 performs image processing on the captured X-ray image.
- the operation unit 107 inputs an operation instruction from the user, and the display unit 109 displays an X-ray image.
- the image storage unit 106 stores the moving image preprocessed by the preprocessing unit 105 and the X-ray image processed by the image processing unit 108.
- the image processing unit 108 further includes a mask image generation unit 110, a first inter-image difference processing unit 111, a second inter-image difference processing unit 112, a first region acquisition processing unit 113, and a second region acquisition processing unit. 114 and an alignment processing unit 115.
- the X-ray generation unit 101, the two-dimensional X-ray sensor 104, the preprocessing unit 105, the image storage unit 106, the image processing unit 108, the operation unit 107, and the display unit 109 are connected via a bus 116.
- the above-described X-ray image processing apparatus 100 images the flow of a contrast agent inside a blood vessel (hereinafter, X-ray moving image imaging).
- the X-ray image processing apparatus 100 starts X-ray moving image imaging in response to an imaging start instruction from the user via the operation unit 107.
- the user sets shooting conditions through the operation unit 107 so as to obtain a desired image quality.
- the shooting condition set by the operation unit 107 is reflected in the shooting start instruction output from the operation unit 107.
- the X-ray generation unit 101 When an imaging start instruction is input, the X-ray generation unit 101 generates an X-ray pulse in accordance with the imaging conditions set by the user.
- the two-dimensional X-ray sensor 104 generates an X-ray image frame by frame in synchronization with the X-ray pulse, and outputs the generated frame to the preprocessing unit 105.
- the pre-processing unit 105 performs predetermined pre-processing considering the characteristics of the two-dimensional X-ray sensor 104 for each frame of the X-ray image.
- the image storage unit 106 stores the X-ray image in accordance with a storage instruction from the user via the operation unit 107.
- the preprocessing unit 105 When performing digital subtraction angiography (DSA processing) in X-ray moving image shooting, the preprocessing unit 105 inputs the preprocessed X-ray image to the mask image generation unit 110.
- the image before the contrast agent inflow (hereinafter referred to as a mask image) is generally several frames immediately after the start of X-ray moving image capturing, and more preferably, the positional deviation from the image after the contrast agent inflow (hereinafter referred to as a live image) is small. It is a frame immediately before the contrast agent inflow. Several frames after the start of X-ray moving image imaging are used to generate a mask image.
- a frame number for example, a condition such as a frame number after the start of X-ray moving image capturing
- the mask image generating unit 110 sets the condition according to the setting.
- a frame that satisfies the condition is output to the image storage unit 106 as a mask image.
- the mask image generation unit 110 detects the inflow of the contrast agent by analyzing a frame obtained by X-ray moving image capturing, and the mask image generation unit 110 automatically selects the frame immediately before the inflow of the contrast agent. May be.
- the mask image generation unit 110 may add the pixel values I of a plurality of frames and output as a single mask image M as in the following Expression 1.
- n is the frame number of the image output from the two-dimensional X-ray sensor 104
- the nth frame image is In.
- the parameters startNo and endNo in Equation 1 indicate the start frame number and end frame number of frame addition specified in advance by the user.
- (x, y) is the pixel index of the image
- In (x, y) is the pixel value at the coordinates (x, y) of the image I in the nth frame
- M (x, y) is the coordinates ( x, y) is the pixel value.
- the mask image generation unit 110 outputs the generated mask image, and the image storage unit 106 stores the mask image generated by the mask image generation unit 110. Frames taken before and during the creation of the mask image can be displayed on the display unit 109 in real time after image processing for predetermined display (not shown) is performed.
- the X-ray image processing apparatus 100 performs DSA on the basis of the inter-image difference using the mask image stored in the image storage unit 106 with respect to each frame of the image (live image) after the contrast agent inflow taken after the mask image is created.
- DSA image generation processing is performed as processing for generating an image. The flow of DSA image generation processing will be described below.
- FIG. 2 is a flowchart for explaining the flow of DSA image generation processing.
- the first inter-image difference processing unit 111 converts a live image that is an image preprocessed by the preprocessing unit 105 and a mask image stored in the image storage unit 106 according to Equation 2 below.
- a first subtraction image (difference image) obtained by difference between images is generated.
- S1 represents a first subtraction image (difference image)
- L represents a live image
- M represents a mask image.
- (X, y) represents the pixel index of the image
- S1 (x, y), L (x, y), and M (x, y) represent the pixel values of the first subtraction image, live image, and mask image, respectively.
- FIG. 7A is a diagram exemplarily showing an inter-image difference by the first inter-image difference processing unit 111.
- a live image 701 corresponds to L in Expression 2 (hereinafter also referred to as a live image L), and a mask image 702.
- Corresponds to M in Equation 2 hereinafter also referred to as mask image M).
- a subtraction image 703 (difference image) obtained by the inter-image difference corresponds to S1 in Expression 2.
- the first region acquisition processing unit 113 acquires a blood vessel region (contrast blood vessel region) into which the contrast agent has flowed using the distribution of pixel values in the first subtraction image S1 (difference image).
- the blood vessel region (contrast vessel region) is acquired from the first subtraction image S1 (difference image) as a linear region.
- FIG. 7B is a diagram exemplarily showing a linear region indicating a region into which a contrast agent has flowed as a vascular region (contrast vascular region), and the first region acquisition processing unit 113 is a first subtraction image.
- a linear region 704 is acquired in the subtraction image 703 (difference image). The specific contents of the acquisition process of the linear region 704 in this step will be described later with reference to FIG.
- step S203 the second region acquisition processing unit 114 uses the first subtraction image S1 and the pixel values of the pixels adjacent to the linear region 704 (contrast vessel region) indicating the region into which the contrast agent has flowed.
- a peripheral region (contrast blood vessel peripheral region) of the linear region is acquired. The specific contents of the acquisition process in this step will be described later with reference to FIG.
- step S204 the alignment processing unit 115 compares the positions using the linear region (contrast vessel region) and the peripheral region of the linear region (contrast vessel peripheral region).
- the alignment processing unit 115 obtains a correction amount that minimizes the displacement between pixels (between pixel sets) in the live image L and the mask image M by comparing the positions, and aligns the live image L and the mask image M. Do.
- FIG. 8A is a diagram exemplarily showing correction amount calculation processing by the alignment processing unit 115.
- the alignment processing unit 115 compares the positions using the acquired linear region (contrast vessel region) and the peripheral region (contrast vessel peripheral region), and the positional deviation between corresponding pixels in the live image L and the mask image M. The correction amount that minimizes is acquired. Then, the alignment processing unit 115 aligns the live image L and the mask image M using the acquired correction amount.
- the alignment processing unit 115 aligns the live image with the mask image, for example, using the mask image as a reference as the alignment processing. Alternatively, the alignment processing unit 115 aligns the mask image with the live image, for example, based on the live image as the alignment process. Alternatively, the alignment processing unit 115 may deform both the live image and the mask image and align both.
- a mask image M ′ that has been aligned is acquired by aligning the mask image M with the live image L with the live image L as a reference, and an alignment processing unit A case of 115 output will be described.
- FIG. 8B is a diagram exemplarily showing the alignment processing by the alignment processing unit 115, and the mask image L follows the comparison of the positions in the linear region and the peripheral region according to the correction amount calculated by the correction amount calculation processing. Alignment is applied.
- step S205 the second inter-image difference processing unit 112 generates and outputs a second subtraction image by subtracting the registered mask image M 'from the live image L.
- the X-ray image processing apparatus 100 inputs this second subtraction image as a DSA image to the display unit 109, and the display unit 109 displays the DSA image.
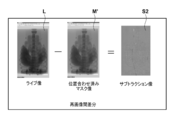
- FIG. 9A is a diagram exemplarily showing an inter-image difference by the second inter-image difference processing unit 112, and the second subtraction image (S2) is obtained by subtracting the registered mask image M ′ from the live image L. Is shown.
- FIG. 9B is a diagram illustrating a second subtraction image (DSA image: S2) acquired by the inter-image difference by the second inter-image difference processing unit 112.
- the first area acquisition processing unit 113 calculates the pixel value Tbg of the background area in the first subtraction image.
- the pixel value Tbg of the background region is 0 (zero).
- the pixel value Tbg in the background region may not be zero.
- the first region acquisition processing unit 113 converts the pixel value of the first subtraction image into a histogram using the fact that the background region occupies a large area with respect to the entire area of the first subtraction image. Then, the first region acquisition processing unit 113 calculates the pixel value that is the mode value as the pixel value (background pixel value) Tbg of the background region.
- step S302 the first region acquisition processing unit 113 performs threshold processing on the first subtraction image using the pixel value Tbg of the background region as a threshold, sets the contrast blood vessel region to “1”, and other background regions. Is output as a binary image represented by “0”.
- the contrasted blood vessel region is generally a region having a pixel value smaller than the pixel value Tbg of the background region, acquisition of the contrasted blood vessel region ( Coarse acquisition).
- S1 is a first subtraction image
- B0 is a binary image that is the result of threshold processing
- (x, y) represents the coordinates of the image.
- S1 (x, y) represents a pixel value in the pixel (x, y) of the first subtraction image S1.
- B0 (x, y) represents a pixel value in the pixel (x, y) of the binary image B0. Therefore, the first area acquisition processing unit 113 performs a comparison process for comparing the pixel value S1 (x, y) of the first subtraction image S1 with the pixel value Tbg (threshold value) of the background area in accordance with Equation 3 for all pixels. To obtain a binary image B0.
- the first region acquisition processing unit 113 performs the threshold processing of the following Expression 4 using an offset offset that is a value larger than zero. It is also possible.
- step S303 the first region acquisition processing unit 113 applies the shrinkage process of the morphological operation to the binary image B0 a predetermined number of times, and outputs the shrinked binary image B1 (shrinkage process). Since this process replaces the isolated pixel (1-pixel) indicating “1” on the binary image B0 with the pixel (0-pixel) indicating “0”, there is an effect of reducing noise.
- the number of times the shrinkage process is applied depends on the image resolution, the shooting conditions, and the pixel value Tbg (threshold value) of the background area, and therefore an appropriate number determined experimentally may be set. If noise reduction is not necessary, this step can be omitted.
- step S304 the first region acquisition processing unit 113 applies the expansion process of the morphological operation to the binary image B0 or the contracted binary image B1 a predetermined number of times, and outputs the binary image B2 that has been expanded.
- This process is a process of replacing the 0-pixel (pixel indicating the background) adjacent to the 1-pixel (pixel indicating the contrasted blood vessel region (linear region)) with 1-pixel in B1.
- the number of times that the expansion process is applied depends on the image resolution, shooting conditions, the pixel value Tbg (threshold value) of the background area, and the number of times that the above-described contraction process is applied.
- Tbg threshold value
- the desired contrasted blood vessel region is only the central portion of a thick blood vessel or the region where the contrast agent is dark, the number of times of applying the expansion process may be reduced or omitted.
- the above processing is performed by the first region acquisition processing unit 113, and 1-pixel of the obtained binary image B2 is a contrast blood vessel region (linear region).
- step S305 the second region acquisition processing unit 114 performs a dilation process using the binary image B2 that is a contrast blood vessel region as an initial image, thereby further generating a binary image B3 having the contrast blood vessel peripheral region as one pixel.
- the number of times of application of the expansion processing is determined appropriately in consideration of the image resolution and the desired size of the peripheral region of the contrast blood vessel.
- step S306 the second region acquisition processing unit 114 removes the contrasted blood vessel region by subtracting the binary image B2 from the binary image B3 according to the following formula 5, and only the contrasted blood vessel peripheral region is set to 1-pixel.
- the obtained binary image B4 is acquired (difference between binary images).
- the contrasted blood vessel region is defined as a connected region, the binary image obtained by threshold processing is labeled, and the region with the largest area or the region having a linear structure is defined as the contrasted blood vessel region. You may get it. Also, using the fact that the subtraction image (difference image) that is the region acquisition target is a moving image, the contrast blood vessel region is obtained by the above threshold processing and morphological calculation for the first frame, and the second and subsequent frames are the previous frame. You may perform an acquisition process based on an acquisition result. Specifically, a method can be used in which a contrasted blood vessel region acquired in the previous frame is used as a start region, and a region that is likely to be a contrasted blood vessel in a nearby region is acquired by threshold processing or expansion processing.
- step S204 the alignment process in step S204 in FIG. 2 will be described.
- various methods can be used for the alignment process in step S204.
- shifting the pixel of the mask image M pixel shift
- the method of aligning will be described.
- the image M ′ obtained by pixel-shifting the mask image M can be expressed by the following equation 6 where the shift amount in the x-axis direction is i and the shift amount in the y-axis direction is j.
- W and H are the horizontal size and vertical size of the mask image M and the image M ′.
- the coordinates (xi, yj) are outside the mask image M, there is no pixel value, and therefore an arbitrary predetermined value dummy is set as the value of M ′ (x, y).
- the alignment processing by pixel shift that shifts the pixels generates an image M ′ while moving the shift amounts i and j within a predetermined shift range, and sequentially compares with the live image L, so that the amount of correction is minimized.
- the maximum shift amount is smax, and the shift range is ( ⁇ smax ⁇ i ⁇ smax, ⁇ smax ⁇ j ⁇ smax). If the evaluation value of the positional deviation between the live image L when the shift amount is i, j and the pixel-shifted image M ′ is E (i, j), the evaluation value E (evaluation function) is, for example, It can obtain
- the image M ′ obtained by pixel-shifting the mask image M by the shift amount (i, j) that minimizes the evaluation value E is the aligned mask image output from the alignment processing unit 115 in step S204.
- Expression 7 is a coefficient indicating a predetermined weight in the region represented by the binary images B2 and B4 with respect to a value obtained by squaring the difference in pixel value between the live image L and the pixel-shifted mask image M ′.
- the coefficients a and b are multiplied to mean the sum. Further, by taking the sum in a range in which the maximum shift amount smax is taken into consideration, the variation in the total number of pixels due to the shift amount and the dummy value are prevented from affecting the evaluation value E.
- a and b are coefficients that determine the degree of contribution to the evaluation value of the region represented by the binary images B2 and B4, respectively.
- the contributions a and b are set as different weights for the binary images B2 and B4.
- the contrasted blood vessel region represented by the binary image B2 has a contrasted blood vessel region in the live image and no contrasted blood vessel region in the mask image. Therefore, the evaluation value based on the pixel value comparison as shown in Equation 7 has a value of It will not be zero. For this reason, a more preferable evaluation value can be obtained by setting the contribution degree as a ⁇ b.
- the evaluation values may be obtained using the functions f and g for the binary images B2 and B4, respectively.
- the function g is defined so as to calculate the evaluation value based on the pixel value, as in Equation 7.
- a function f that compares the edges may be defined in order to compare the structure in the blood vessel rather than the pixel value considering the presence or absence of the contrast agent.
- the alignment processing unit 115 can perform edge detection processing on the live image L and the mask image M, and can align the live image L and the mask image M by comparing the obtained edge information.
- the function f can be expressed by the following formula 9, for example.
- Equation 9 obtains the differential values in the horizontal direction and the vertical direction in the target pixel (x, y) of the mask image M ′ and the live image L, and uses them as evaluation values.
- the second inter-image difference processing unit 112 generates a second subtraction image S2 by subtracting the registered mask image M ′ from the live image L (Equation 10). At this time, pixels having a dummy value (xi ⁇ 0, xi ⁇ W, yj ⁇ 0, yj ⁇ H) in the aligned mask image M ′ are also included in the second subtraction image. Let it be a dummy value.
- the alignment method is not limited to the method using the pixel shift.
- parametric image deformation such as rotation, enlargement, or reduction may be used depending on the movement of the subject that occurs between mask image generation and live image shooting.
- control points are arranged in a mesh shape on the mask image and the live image, the correspondence between the mask image and the live image is obtained at each control point, and the movement of the control points and the interpolation of the pixel values between the control points are performed.
- Non-rigid registration such as warping to be performed may be used.
- the alignment processing unit 115 divides the mask image M and the live image L into a plurality of meshes, and associates control points indicating the nodes of the mesh between the mask image M and the live image L. Then, the alignment processing unit 115 performs a mask image and a non-rigid registration process using the movement amount of the control point and a value interpolated from the movement amount between the control points for the position of the mesh other than the control point. It is also possible to align live images. The alignment processing unit 115 performs a non-rigid registration process using the comparison result of the positions of the linear region and the peripheral region, and moves the corresponding position between the mask image and the live image and the corresponding position. The interpolated movement amount is acquired as the correction amount. Based on the acquired correction amount, the alignment processing unit 115 can align the live image and the mask image.
- the mask Mn that minimizes the evaluation value E (n) is input to the second inter-image difference processing unit 112.
- the evaluation value can be expressed by the following Expression 12.
- the mask Mn that minimizes the evaluation value E (i, j, n) and the image aligned with the shift amount i, j are input to the second inter-image difference processing unit 112. .
- the alignment between the live image and the mask image is performed based on the contrasted blood vessel region acquired from the first subtraction image and its surrounding pixels. This makes it possible to reduce motion artifacts in contrasted blood vessel regions that are of particular clinical interest.
- the X-ray image processing apparatus 100 can specify display frame changes such as playback, stop, frame advance, and frame return of stored X-ray moving images in accordance with instructions from the user via the operation unit 107. Further, the X-ray image processing apparatus 100 can change conditions such as a frame number used as a mask image according to an instruction from the user via the operation unit 107.
- the X-ray image processing apparatus 100 inputs an X-ray image stored in the image storage unit 106 to the mask image generation unit 110 in accordance with the changed conditions.
- the mask image generation unit 110 generates a mask image M from the input X-ray image according to new conditions, and outputs the mask image M to the image storage unit 106 as a mask image M.
- the X-ray image processing apparatus 100 updates the displayed DSA image in accordance with a display frame or mask image M change instruction from the user via the operation unit 107. That is, the new frame designated by the user is set as the live image L, and the new mask image M is input to the first inter-image difference processing unit 111.
- the first inter-image difference processing unit 111 generates a first subtraction image obtained by subtracting the mask image M from the new live image L and displays it on the display unit 109.
- the X-ray image processing apparatus 100 applies the DSA image generation process described in the flowchart shown in FIG. 2 to this new input, and displays the generated DSA image (second subtraction image) on the display unit 109. May be.
- the X-ray image processing apparatus 100 can set the region of interest of the displayed DSA image according to an instruction from the user via the operation unit 107.
- various methods can be considered for the instruction from the user.
- the coordinates of the pixel are designated by the mouse pointer of the operation unit 107 on the subtraction image displayed on the display unit 109.
- step S401 the X-ray image processing apparatus 100 generates a set of a live image L and a mask image M for generating a subtraction image for performing motion artifact reduction again based on an instruction from the user via the operation unit 107. Read from the image storage unit 106.
- step S402 the X-ray image processing apparatus 100 generates a subtraction image from the read live image L and mask image M, and displays the subtraction image on the display unit 109.
- This subtraction image may be a first subtraction image that is the output of the first inter-image difference processing unit 111, or may be a second subtraction image that has undergone the DSA image generation processing shown in FIG. In the following description, it is simply called a subtraction image.
- step S403 the X-ray image processing apparatus 100 acquires a pixel whose coordinates are specified in the subtraction image based on an instruction from the user via the operation unit 107.
- the pixel whose coordinates are specified is a pixel unit in the contrasted blood vessel region of the subtraction image.
- step S404 the X-ray image processing apparatus 100 inputs the subtraction image and the coordinate-designated pixel to the first region acquisition processing unit 113, and the first region acquisition processing unit 113 acquires the contrasted blood vessel region. Output.
- step S405 the X-ray image processing apparatus 100 inputs the subtraction image and the contrasted blood vessel region output from the first region acquisition processing unit 113 to the second region acquisition processing unit 114, and the second region acquisition processing unit.
- Reference numeral 114 acquires and outputs the contrasted blood vessel peripheral region.
- step S406 the X-ray image processing apparatus 100 inputs the contrast blood vessel region, the contrast blood vessel peripheral region, and the live image L and the mask image M read in step S401 to the alignment processing unit 115.
- the alignment processing unit 115 obtains a correction amount that minimizes a positional shift between pixels (between pixel sets) in the live image L and the mask image M in the contrasted blood vessel region and the contrasted blood vessel peripheral region, and determines the live image L and the mask image. Align M.
- the alignment processing unit 115 aligns the live image with the mask image, for example, using the mask image as a reference.
- the alignment processing unit 115 aligns the mask image with the live image, for example, based on the live image as the alignment process.
- the alignment processing unit 115 may deform both the live image and the mask image and align both.
- the mask image M ′′ is obtained by aligning the mask image M with the live image L using the live image L as a reference, and the alignment processing is performed. A case where the output of the unit 115 is used will be described.
- step S407 the X-ray image processing apparatus 100 inputs the set of the live image and the registered mask image to the second inter-image difference processing unit 112.
- the second inter-image difference processing unit 112 generates and outputs a third subtraction image by subtracting the registered mask image M ′′ from the live image L.
- the X-ray image processing apparatus 100 inputs the third subtraction image as a DSA image to the display unit 109, and the display unit 109 displays the DSA image.
- step S404 of the present embodiment various methods can be used to acquire the contrasted blood vessel region based on the coordinates designated by the user.
- a method of acquiring the acquisition target binary image B5 by the region expansion method using the pixel designated by coordinates as the start point will be further described with reference to the flowchart shown in FIG.
- 1 is set for the contrasted blood vessel region
- 0 is set for the other background regions.
- step S501 the first region acquisition processing unit 113 acquires the pixel value S (x0, y0) of the pixel (x0, y0) whose coordinates are specified in the subtraction image S as the reference pixel value V0.
- the first area acquisition processing unit 113 can directly use the pixel value S (x0, y0) as the reference pixel value V0.
- the first area acquisition processing unit 113 considers noise in accordance with the following Expression 13, and averages the pixel values of the peripheral pixels (x ⁇ W to x + W, y ⁇ W to y + W) of the pixel (x0, y0). It is also possible to calculate and use the value.
- step S502 the first area acquisition processing unit 113 initializes the pixel value of the pixel (x0, y0) to 1 and the other background area to 0 in the binary image B5. Furthermore, the first area acquisition processing unit 113 puts the pixel (x0, y0) into a queue that is a data structure for performing first-in first-out.
- step S504 the first region acquisition processing unit 113 acquires a neighboring pixel Pn of the target pixel Pt starting from the coordinate-designated pixel.
- the first area acquisition processing unit 113 can also use the average value of the pixel values of the neighboring pixels of the neighboring pixel Pn in consideration of noise according to Equation 13 as the pixel value Vn of the subtraction image S.
- step S506 the first region acquisition processing unit 113 updates the value of the binary image B5 based on the values of B5n and Vn (1 ⁇ n ⁇ 4). For example, the first region acquisition processing unit 113 updates the value of the binary image B5 as in the following Expression 14.
- the value of the binary image B5 is updated from 0 to 1 because the pre-update value B5n is 0, and the value of Vn is the contrast blood vessel whose pixel Pn is the acquisition target. It is a pixel determined to have an area-like feature. Further, the pixel Pn in which the value of the binary image B5 is updated from 0 to 1 in Expression 14 is newly added to the queue.
- the first region acquisition processing unit 113 determines that the contrasted blood vessel region has a characteristic when the absolute value of the difference from the reference pixel value V0 obtained in step S501 falls within the predetermined threshold value “Trange”. To do.
- the first area acquisition processing unit 113 updates the value of the binary image B5 and adds a pixel to the queue.
- step S506 the first area acquisition processing unit 113 determines whether a pixel is in the queue or is empty. When there is a pixel in the queue (S507-Yes), the first area acquisition processing unit 113 returns the process to step S503, and repeats the same processes after step S503. If it is determined in step S507 that the queue is empty (S507-No), the process ends.
- the first area acquisition processing unit 113 acquires a set of pixels that are connected to the pixel whose coordinates are specified by the user and has pixel values that are likely to be contrasted blood vessel areas, and is used as a binary image B5. Output.
- the method for acquiring the contrasted blood vessel region intended by the present embodiment is not limited to this.
- the user designates the coordinates of the start point and end point of the contrast vessel region that the user particularly wants to align, and the first region acquisition processing unit 113 acquires the contrast vessel region existing between them based on the two specified points. You may do it.
- the target is an image that has already been captured and stored in the image storage unit 106
- the live image that fluctuates in time is read from the image storage unit 106 and used, thereby improving the acquisition accuracy of the region acquisition process. It can also be increased.
- region acquisition that considers that the acquisition result of each frame is continuous between frames is applicable. .
- alignment between the live image and the mask image is performed using the contrasted blood vessel region acquired based on a simple instruction from the user. This makes it possible to reduce motion artifacts particularly in contrasted blood vessel regions that are of interest to the user.
- Each unit shown in FIG. 1 may be configured by dedicated hardware, but the functional configuration of the hardware may be realized by software.
- the function of each unit illustrated in FIG. 1 can be realized by installing software in the information processing apparatus and using the arithmetic function of the information processing apparatus for an image processing method by executing the software.
- pre-processing is performed on each frame of the moving image output from the two-dimensional X-ray sensor 104 to acquire a mask image M and a live image L before and after the contrast agent inflow.
- a subtraction image is acquired in the inter-image difference processing step.
- FIG. 6 is a block diagram showing the hardware configuration of the information processing apparatus and the configuration of its peripheral devices.
- the information processing apparatus 1000 is connected to the imaging apparatus 2000 and is configured to be capable of data communication with each other.
- the CPU 1010 can perform overall control of the information processing apparatus 1000 using programs and data stored in the RAM 1020 and the ROM 1030, and can execute arithmetic processing related to image processing that is predetermined by execution of the program. is there.
- the RAM 1020 includes an area for temporarily storing programs and data loaded from the magneto-optical disk 1060 and the hard disk 1050. Further, the RAM 1020 includes an area for temporarily storing image data such as a mask image, a live image, and a subtraction image acquired from the imaging apparatus 2000. The RAM 1020 also includes a work area used when the CPU 1010 executes various processes. The ROM 1030 stores setting data of the information processing apparatus 1000, a boot program, and the like.
- the hard disk 1050 holds an OS (operating system) and programs and data for causing the CPU 1010 included in the computer to execute each process performed by each unit illustrated in FIG. These are appropriately loaded into the RAM 1020 in accordance with the control by the CPU 1010 and are processed by the CPU 1010 (computer). It is also possible to store the mask image, live image, and subtraction image data in the hard disk 1050.
- OS operating system
- programs and data for causing the CPU 1010 included in the computer to execute each process performed by each unit illustrated in FIG. These are appropriately loaded into the RAM 1020 in accordance with the control by the CPU 1010 and are processed by the CPU 1010 (computer). It is also possible to store the mask image, live image, and subtraction image data in the hard disk 1050.
- the magneto-optical disk 1060 is an example of an information storage medium, and a part or all of programs and data stored in the hard disk 1050 can be stored in the magneto-optical disk 1060.
- the mouse 1070 and the keyboard 1080 can be operated by an operator of the information processing apparatus 1000 to input various instructions to the CPU 1010 such as coordinate designation of a region of interest by the operation unit 107.
- the printer 1090 can print out an image displayed on the display unit 109 on a recording medium.
- the display device 1100 includes a CRT, a liquid crystal screen, and the like, and can display a processing result by the CPU 1010 using an image, text, or the like. For example, an image processed by each unit shown in FIG. 1 and finally output from the display unit 109 can be displayed.
- the display unit 109 functions as a display control unit for displaying an image on the display device 1100.
- the bus 1040 connects the units in the information processing apparatus 1000 and enables data transmission / reception between the units.
- the imaging device 2000 can capture a moving image during inflow of a contrast medium, such as an X-ray fluoroscopy device, and the captured image data is transmitted to the information processing device 1000.
- a contrast medium such as an X-ray fluoroscopy device
- image data may be transmitted sequentially each time an image is captured.
- the present invention can also be realized by executing the following processing. That is, software (program) that realizes the functions of the above-described embodiments is supplied to a system or apparatus via a network or various storage media, and a computer (or CPU, MPU, or the like) of the system or apparatus reads the program. It is a process to be executed.
Abstract
X線画像処理装置は、造影剤流入前の被写体を撮像したマスク像と造影剤流入後のライブ像との間で差分処理を行うことで第一の差分画像を生成する第一の差分処理部と、第一の差分画像における画素値の分布を用いて、造影剤が流入した領域を示す線状領域を取得する第一の取得処理部と、線状領域に隣接する画素の画素値を用いて、線状領域の周辺領域を第一の差分画像から取得する第二の取得処理部と、線状領域と周辺領域とを用いた位置の比較により、ライブ像およびマスク像の画素間の位置合わせを行う位置合わせ処理部と、を備える。
Description
本発明は、X線画像処理装置、X線画像処理方法、及びプログラムに関する。
近年のディジタル技術の進歩により、医療の分野でも画像にディジタル処理を施すことが一般的になっている。ディジタル画像処理の好適な適用例としては、デジタル・サブトラクション・アンギオグラフィー(以下、DSA)を取得するDSA処理が挙げられる。DSA像は、被写体への造影剤流入の前後で画像を取得し、造影剤流入後の画像(ライブ像)から造影剤流入前の画像(マスク像)を画像間差分して得られる画像である。ライブ像からマスク像の差分をとる画像間の差分処理は、診断上の関心領域である血管領域を、造影剤流入による画像間の変化領域として取得するものである。また、画像間差分処理は、関心領域である血管領域以外の領域を背景領域として取り除く。これにより生成されるDSA像は、被写体構造の影響を受けることなく関心領域である血管領域の観察行うことができるため、診断上有用な画像である。
DSA像の診断上の利用目的は造影された血管像の明瞭な描出にある。この目的は、ライブ像からマスク像を減算することによって果たされるが、一般に被写体には動きが生じるため、DSA像にモーションアーチファクトとして現れてしまう。理想的には造影剤が流入した血管領域だけを描出することが期待されるDSA像において、モーションアーチファクトは血管像の明瞭な描出の妨げとなる。特に血管領域内にモーションアーチファクトが生じた場合は血管の狭窄などが非常に見辛いものとなる。
この問題に対し、特許文献1では、ライブ像からマスク像を差分したサブトラクション像内に特にモーションアーチファクトに基づいて関心領域を定め、関心領域に限局してピクセルシフトによる位置合わせを行う手法が開示されている。ピクセルシフトによる位置合わせは、ライブ像とマスク像との間で画像間差分を行う際、差分する画素を上下左右のいずれかにずらすことでモーションアーチファクトを低減する手法である。ここでピクセルシフト量を、モーションアーチファクトに基づいて定めた関心領域から算出することにより、効果的なモーションアーチファクトの低減を自動で行っている。
DSA像において完全な位置合わせ処理を行うことは困難なものとなる。被写体は3次元的な動きを伴うため、ピクセルシフトのような2次元的な処理では原理的に位置合わせを行うことはできない。また、3次元的な動きにも対応するため、非剛体レジストレーションを用いる手法も考えられるが、アルゴリズムが複雑になるため非常に計算コストが高くなる他、場合によっては実際の被写体には存在しない偽像を生じる可能性もある。
そこで、特許文献1のようにモーションアーチファクトに基づいて定めた領域に限局した位置合わせなどを行うことで部分最適化を行う手法が考えられる。部分最適化を行う場合、画像全体の位置合わせを行うのではなく、特に必要な部分において位置合わせを行うことで計算コストを抑えることができる。
DSA像では臨床上興味のある領域である造影血管領域において位置合わせを行うことが望ましい。しかし、特許文献1に示される手法はモーションアーチファクトの低減に主眼が置かれており、臨床上興味のある領域を関心領域とすることは述べられていない。
本発明は、DSA像における位置合わせ処理において、臨床上の関心のある造影血管領域およびその周辺領域を用いて、ライブ像およびマスク像の位置合わせを行うことが可能なX線画像処理技術を提供する。
本発明の一つの側面にかかるX線画像処理装置は、造影剤流入前の被写体を撮像したマスク像と造影剤流入後のライブ像との間で差分処理を行うことで第一の差分画像を生成する第一の差分処理手段と、
前記第一の差分画像における画素値の分布を用いて、造影剤が流入した領域を示す線状領域を取得する第一の取得処理手段と、
前記線状領域に隣接する画素の画素値を用いて、前記線状領域の周辺領域を前記第一の差分画像から取得する第二の取得処理手段と、
前記線状領域と前記周辺領域とを用いた位置の比較により、前記ライブ像および前記マスク像の画素間の位置合わせを行う位置合わせ処理手段と、を備えることを特徴とする。
前記第一の差分画像における画素値の分布を用いて、造影剤が流入した領域を示す線状領域を取得する第一の取得処理手段と、
前記線状領域に隣接する画素の画素値を用いて、前記線状領域の周辺領域を前記第一の差分画像から取得する第二の取得処理手段と、
前記線状領域と前記周辺領域とを用いた位置の比較により、前記ライブ像および前記マスク像の画素間の位置合わせを行う位置合わせ処理手段と、を備えることを特徴とする。
本発明によれば、DSA像における位置合わせ処理において、臨床上の関心のある造影血管領域およびその周辺領域を用いて、ライブ像およびマスク像の位置合わせを行うことが可能になる。DSA像におけるモーションアーチファクトの影響を低減して、ライブ像およびマスク像の位置合わせを行うことが可能になる。
本発明のその他の特徴及び利点は、添付図面を参照とした以下の説明により明らかになるであろう。なお、添付図面においては、同じ若しくは同様の構成には、同じ参照番号を付す。
添付図面は明細書に含まれ、その一部を構成し、本発明の実施の形態を示し、その記述と共に本発明の原理を説明するために用いられる。
第1及び第2実施形態にかかるX線画像処理装置を説明する図。
第1実施形態にかかる処理の流れを説明する図。
第1実施形態にかかる領域取得処理の一例の流れを説明する図。
第2実施形態にかかる処理の流れを説明する図。
第2実施形態にかかる領域取得処理の一例の流れを説明する図。
実施形態のX線画像処理装置を用いたシステムの一例を示す図。
第一の画像間差分処理部による画像間差分を例示的に示す図。
第一の画像間差分処理部による画像間差分を例示的に示す図。
位置合わせ処理を例示的に示す図。
位置合わせ処理を例示的に示す図。
第二の画像間差分処理部による画像間差分を例示的に示す図。
第二の画像間差分処理部による画像間差分を例示的に示す図。
以下、図面を参照して、本発明の実施形態を例示的に詳しく説明する。ただし、この実施形態に記載されている構成要素はあくまで例示であり、本発明の技術的範囲は、特許請求の範囲によって確定されるのであって、以下の個別の実施形態によって限定されるわけではない。
(第1実施形態)
図1は実施形態に係る画像処理装置(以下、「X線画像処理装置100」)の概略構成を示す図である。X線画像処理装置100は、X線発生部101、2次元X線センサ104、前処理部105、画像記憶部106、操作部107、画像処理部108および表示部109を有する。
図1は実施形態に係る画像処理装置(以下、「X線画像処理装置100」)の概略構成を示す図である。X線画像処理装置100は、X線発生部101、2次元X線センサ104、前処理部105、画像記憶部106、操作部107、画像処理部108および表示部109を有する。
X線発生部101は、毎秒3~30パルスのX線パルスを発生することが可能である。2次元X線センサ104は被写体102を透過したX線103を受けてX線パルスに同期した動画像をX線画像として撮像する。2次元X線センサ104は、X線照射された被写体102の動画像を撮像する撮像部として機能する。前処理部105は2次元X線センサ104が異なるタイミングで撮像した動画像の各フレームに対して前処理を行う。
画像処理部108は撮像したX線画像に画像処理を行う。操作部107はユーザからの操作指示を入力し、表示部109はX線画像の表示を行う。画像記憶部106は前処理部105により前処理された動画像や画像処理部108により画像処理されたX線画像を記憶する。
画像処理部108は、更に、マスク像生成部110、第一の画像間差分処理部111、第二の画像間差分処理部112、第一の領域取得処理部113、第二の領域取得処理部114、位置合わせ処理部115を有する。
X線発生部101、2次元X線センサ104、前処理部105、画像記憶部106、画像処理部108、操作部107および表示部109は、バス116を介して接続されているものとする。
本実施形態では、上述のX線画像処理装置100により、血管内部の造影剤の流れを撮影する(以下、X線動画撮影)場合について説明する。X線画像処理装置100は操作部107を介したユーザからの撮影開始指示により、X線動画撮影を開始する。ユーザは操作部107を介して所望の画質が得られるよう撮影条件を設定する。操作部107から出力される撮影開始指示には、操作部107で設定された撮影条件が反映される。
撮影開始指示が入力されると、X線発生部101は、ユーザにより設定された撮影条件に従うX線パルスを発生する。
2次元X線センサ104はX線パルスに同期してX線画像を1フレームずつ生成し、生成したフレームを前処理部105に出力する。前処理部105は、X線画像の各フレームに対し2次元X線センサ104の特性を考慮した所定の前処理を行う。
撮影後に再生する必要がある場合、操作部107を介したユーザからの保存指示し従って、画像記憶部106はX線画像を保存する。
X線動画撮影においてデジタル・サブトラクション・アンギオグラフィー(DSA処理)を行う場合、前処理部105は、前処理を行ったX線画像をマスク像生成部110に入力する。造影剤流入前の画像(以下、マスク像)は、一般にX線動画撮影の開始直後の数フレームであり、より好ましくは、造影剤流入後の画像(以下、ライブ像)との位置ずれが小さい造影剤流入の直前フレームである。X線動画撮影の開始後の数フレームはマスク像の生成に用いられる。操作部107を介して、ユーザが予めマスク像として使うフレーム番号(例えば、X線動画撮影の開始後のフレーム番号などの条件)を設定すれば、設定に応じて、マスク像生成部110は条件を満たすフレームをマスク像として画像記憶部106に出力する。
あるいは、マスク像生成部110がX線動画撮影によるフレームを解析することで造影剤の流入を検知し、マスク像生成部110が造影剤流入の直前のフレームを自動的に選択するように構成しても良い。
また、次の式1のようにマスク像生成部110において複数のフレームの画素値Iを加算して一枚のマスク像Mとして出力しても良い。

ここで、nを2次元X線センサ104が出力する画像のフレーム番号とし、nフレーム目の画像をInとする。式1中のパラメータであるstartNoとendNoはユーザが予め指定するフレーム加算の開始フレーム番号と終了フレーム番号を示す。また(x,y)は画像の画素インデックスとし、In(x,y)はnフレーム目の画像Iの座標(x,y)における画素値、M(x,y)はマスク像Mの座標(x,y)における画素値である。
マスク像生成部110は生成したマスク像を出力し、画像記憶部106はマスク像生成部110において生成されたマスク像を保存する。マスク像の作成前、及び作成中に撮影されたフレームは、図示しない所定の表示用の画像処理がなされた後、表示部109にリアルタイムに表示可能である。
X線画像処理装置100は、マスク像作成後に撮影した造影剤流入後の画像(ライブ像)の各フレームに対し、画像記憶部106に保存されているマスク像を用いた画像間差分により、DSA像を生成するための処理としてDSA像生成処理を行なう。DSA像生成処理の流れを以下に説明する。
(DSA像生成処理)
図2はDSA像の生成処理の流れを説明するフローチャートである。 ステップS201で、第一の画像間差分処理部111は、前処理部105によって前処理された画像であるライブ像と、画像記憶部106に保存されているマスク像とを、以下の式2に従って画像間差分した第一のサブトラクション像(差分画像)を生成する。
図2はDSA像の生成処理の流れを説明するフローチャートである。 ステップS201で、第一の画像間差分処理部111は、前処理部105によって前処理された画像であるライブ像と、画像記憶部106に保存されているマスク像とを、以下の式2に従って画像間差分した第一のサブトラクション像(差分画像)を生成する。

ここで、S1は第一のサブトラクション像(差分画像)、Lはライブ像、Mはマスク像を表す。(x,y)は画像の画素インデックス、S1(x,y)、L(x,y)、M(x,y)はそれぞれ第一のサブトラクション像、ライブ像、マスク像の画素値を表す。図7Aは第一の画像間差分処理部111による画像間差分を例示的に示す図であり、ライブ像701は式2のLに対応し(以下、ライブ像Lとも表記する)、マスク像702は式2のM(以下、マスク像Mとも表記する)に対応する。画像間差分により得られたサブトラクション像703(差分画像)は式2のS1に対応する。
ステップS202において、第一の領域取得処理部113は、第一のサブトラクション像S1(差分画像)における画素値の分布を用いて、造影剤が流入した血管領域(造影血管領域)を取得する。血管領域(造影血管領域)は、線状の領域として、第一のサブトラクション像S1(差分画像)から取得される。図7Bは、血管領域(造影血管領域)として、造影剤が流入した領域を示す線状領域を例示的に示す図であり、第一の領域取得処理部113は、第一のサブトラクション像であるサブトラクション像703(差分画像)内において、線状領域704を取得する。本ステップにおける線状領域704の取得処理の具体的な内容については、後に図3で説明する。
ステップS203において、第二の領域取得処理部114は、第一のサブトラクション像S1と、造影剤が流入した領域を示す線状領域704(造影血管領域)に隣接する画素の画素値とを用いて線状領域の周辺領域(造影血管周辺領域)を取得する。本ステップにおける取得処理の具体的な内容については、後に図3で説明する。
ステップS204において、位置合わせ処理部115は、線状領域(造影血管領域)と線状領域の周辺領域(造影血管周辺領域)とを用いた位置の比較を行う。位置合わせ処理部115は、位置の比較により、ライブ像Lおよびマスク像Mにおける画素間(画素集合間)の位置ずれを最小にする補正量を求め、ライブ像Lおよびマスク像Mの位置合わせを行う。
図8Aは、位置合わせ処理部115による補正量算出処理を例示的に示す図である。位置合わせ処理部115は、取得した線状領域(造影血管領域)と周辺領域(造影血管周辺領域)とを用いた位置の比較により、ライブ像Lおよびマスク像Mにおける対応する画素間の位置ずれが最小となるような補正量を取得する。そして、位置合わせ処理部115は、取得した補正量を用いて、ライブ像Lおよびマスク像Mの位置合わせを行う。
位置合わせ処理部115は、位置合わせ処理として、例えば、マスク像を基準として、ライブ像をマスク像に対して位置合わせする。あるいは、位置合わせ処理部115は、位置合わせ処理として、例えば、ライブ像を基準として、マスク像をライブ像に対して位置合わせする。あるいは、位置合わせ処理部115は、ライブ像およびマスク像の両方を変形し、両者の位置合わせを行うものであってもよい。 本実施形態では、説明を簡単にするために、ライブ像Lを基準として、マスク像Mをライブ像Lに対して位置合わせすることで位置合わせ済みマスク像M’を取得し、位置合わせ処理部115の出力とする場合を説明する。図8Bは、位置合わせ処理部115による位置合わせ処理を例示的に示す図であり、マスク像Lは補正量算出処理により算出された補正量に従い、線状領域および周辺領域における位置の比較に従った位置合わせが施される。
ステップS205において、第二の画像間差分処理部112は、ライブ像Lから位置合わせ済みマスク像M’を差分することで第二のサブトラクション像を生成し、出力する。X線画像処理装置100は、この第二のサブトラクション像をDSA像として表示部109に入力し、表示部109はDSA像の表示を行う。図9Aは、第二の画像間差分処理部112による画像間差分を例示的に示す図であり、ライブ像Lから位置合わせ済みマスク像M’を差分して、第二のサブトラクション像(S2)が生成される様子が示されている。図9Bは、第二の画像間差分処理部112による画像間差分により取得された第二のサブトラクション像(DSA像:S2)を例示する図である。
(造影血管領域および造影血管周辺領域の取得)
次に、造影血管領域および造影血管周辺領域の取得処理を具体的に説明する。ステップS202における造影血管領域の取得、及び、ステップS203における造影血管周辺領域の取得は、様々な手法を用いることができる。本実施形態では、閾値処理とモルフォロジ演算とを用いる手法を図3に示すフローチャートを用いて説明する。
次に、造影血管領域および造影血管周辺領域の取得処理を具体的に説明する。ステップS202における造影血管領域の取得、及び、ステップS203における造影血管周辺領域の取得は、様々な手法を用いることができる。本実施形態では、閾値処理とモルフォロジ演算とを用いる手法を図3に示すフローチャートを用いて説明する。
ステップS301において、第一の領域取得処理部113は、第一のサブトラクション像における背景領域の画素値Tbgを算出する。ライブ像Lとマスク像Mとが同じX線量で取得された理想的な状態では背景領域の画素値Tbg=0(ゼロ)である。しかしながら、実際には照射X線のばらつきによりライブ像Lの撮影時のX線量とマスク像Mの撮影時のX線量とは異なるため背景領域の画素値Tbgはゼロではない場合がある。第一のサブトラクション像の全体の面積に対して背景領域が大きな面積を占めることを利用して、第一の領域取得処理部113は、第一のサブトラクション像の画素値をヒストグラムに変換する。そして、第一の領域取得処理部113は、最頻値となる画素値を背景領域の画素値(背景画素値)Tbgとして算出する。
ステップS302において、第一の領域取得処理部113は、第一のサブトラクション像に対して背景領域の画素値Tbgを閾値とした閾値処理を行い、造影血管領域を「1」、それ以外の背景領域を「0」で表した二値画像を出力する。第一のサブトラクション像では、一般に造影血管領域が背景領域の画素値Tbgよりも小さな画素値を取る領域であることを利用し、次の式3で示される閾値処理にて造影血管領域の取得(粗取得)を行う。

ここで、S1は第一のサブトラクション像、B0は閾値処理の結果である二値画像であり、(x,y)は画像の座標を表す。さらに、S1(x,y)は第一のサブトラクション像S1の画素(x,y)における画素値を表す。B0(x,y)は二値画像B0の画素(x,y)における画素値を表す。従って、第一の領域取得処理部113は、式3に従って、第一のサブトラクション像S1の画素値S1(x,y)と背景領域の画素値Tbg(閾値)とを比較する比較処理を全画素について行い、二値画像B0を得る。ただし、一般にX線画像にはノイズが存在するため、造影血管領域(線状領域)は、上述の閾値で明確に切り分けられない場合がある。そこでノイズの影響を避け、造影剤の濃い血管領域のみを取得するために、第一の領域取得処理部113は、ゼロより大きな値であるオフセットoffsetを用いて次の式4の閾値処理を行うことも可能である。

ステップS303において、第一の領域取得処理部113は、二値画像B0に対してモルフォロジ演算の収縮処理を所定回数適用し、収縮済み二値画像B1を出力する(収縮処理)。この処理は二値画像B0上の孤立している「1」を示す画素(1-画素)を、「0」を示す画素(0-画素)に置き換えるため、ノイズの低減の効果がある。収縮処理の適用回数は、画像解像度や撮影条件、背景領域の画素値Tbg(閾値)に依存するため、実験的に定めた適当な回数を設定すれば良い。またノイズ低減が不要な場合はこのステップは省略できる。
ステップS304において、第一の領域取得処理部113は、二値画像B0または収縮済み二値画像B1に対してモルフォロジ演算の膨張処理を所定回数適用し、膨張処理済みの二値画像B2を出力する(膨張処理1)。この処理はB1において1-画素(造影血管領域(線状領域)を示す画素)に隣接する0-画素(背景を示す画素)を1-画素で置き換える処理である。これにより、上述した閾値処理や収縮処理あるいはライブ像Lとマスク像Mとの間の位置ずれによって生じた、本来ならば、つながっている造影血管領域をつなげる効果がある。膨張処理の適用回数は、画像解像度や撮影条件、背景領域の画素値Tbg(閾値)、上述した収縮処理の適用回数に依存する。また所望の造影血管領域が、太い血管の中央部あるいは造影剤の濃い領域のみとする場合は膨張処理の適用回数を少なくするか、省略しても良い。以上の処理が第一の領域取得処理部113で行われる処理であり、得られた二値画像B2の1-画素が造影血管領域(線状領域)である。
ステップS305において、第二の領域取得処理部114は、造影血管領域である二値画像B2を初期画像として膨張処理を行うことで、さらに造影血管周辺領域を1―画素とした二値画像B3を取得する(膨張処理2)。この膨張処理の適用回数は、画像解像度や所望する造影血管周辺領域の大きさを考慮して適当な回数を定める。
ステップS306において、第二の領域取得処理部114は、以下の式5により、二値画像B3から二値画像B2を差分することで造影血管領域を除き、造影血管周辺領域のみを1-画素とした二値画像B4を取得する(二値画像間差分)。

以上が第二の領域取得処理部114で行われる処理であり、得られた二値画像B4の1-画素が造影血管周辺領域である。
上述した手法の他にも、造影血管領域を連結した領域と定義し、閾値処理にて得られた二値画像をラベリングし、最も面積の大きな領域や線状構造を持つ領域を造影血管領域として取得しても良い。また、領域取得の対象であるサブトラクション像(差分画像)が動画であることを利用し、1フレーム目に関しては上述の閾値処理とモルフォロジ演算で造影血管領域を求め、2フレーム目以降は前フレームの取得結果に基づいて取得処理を行っても良い。具体的には前フレームで取得した造影血管領域を開始領域とし、近傍領域で造影血管らしい領域を閾値処理や膨張処理で取得する方法を用いることができる。
(位置合わせ処理)
次に、図2のステップS204の位置合わせ処理について説明する。本実施形態では、ステップS204における位置合わせ処理は、様々な手法を用いることができる。ここでは、上述の造影血管領域を表す二値画像B2、及び造影血管周辺領域を表す二値画像B4に基づいて、マスク像Mの画素をずらすことで(ピクセルシフト)、ライブ像Lとの間で位置合わせをする方法を説明する。
次に、図2のステップS204の位置合わせ処理について説明する。本実施形態では、ステップS204における位置合わせ処理は、様々な手法を用いることができる。ここでは、上述の造影血管領域を表す二値画像B2、及び造影血管周辺領域を表す二値画像B4に基づいて、マスク像Mの画素をずらすことで(ピクセルシフト)、ライブ像Lとの間で位置合わせをする方法を説明する。
マスク像Mをピクセルシフトした画像M’は、x軸方向のシフト量をi、y軸方向のシフト量をjとすると次の式6で表すことができる。

WとHはマスク像Mおよび画像M’の横サイズと縦サイズである。座標(x-i,y-j)がマスク像Mの外側となる場合は画素値が存在しないため、予め定めた任意の値dummyをM’(x,y)の値とする。
画素をずらすピクセルシフトによる位置合わせ処理は、シフト量i,jを予め定めたシフト範囲内で動かしながら画像M’を生成し、ライブ像Lと順次比較することで位置ずれが最小となる補正量として、シフト量i,jを求める処理である。最大のシフト量をsmaxとし、シフト範囲を(-smax≦i≦smax,-smax≦j≦smax)とする。シフト量がi,jの場合のライブ像Lと、ピクセルシフトした画像M’との間の位置ずれの評価値をE(i,j)とすれば、評価値E(評価関数)は、例えば次の式7で求めることができる。

評価値Eが最小となるシフト量(i,j)によりマスク像Mをピクセルシフトした画像M’が、ステップS204において位置合わせ処理部115が出力する位置合わせ済みのマスク像である。式7は、ライブ像Lとピクセルシフトしたマスク像M’との間の画素値の差を二乗した値に対して、二値画像B2,B4が表す領域内で所定の重みづけを示す係数として、係数a,bを乗じて総和することを意味している。また、最大シフト量smaxを考慮した範囲で総和をとることにより、シフト量による総和画素数の変動及びdummy値が評価値Eに影響しないようにしている。
ここでa,bは、それぞれ二値画像B2,B4が表す領域の評価値への寄与度を決める係数である。二値画像B2,B4に対し異なる重みづけとして、寄与度a,bを設定しているのは、二値画像B2で表す造影血管領域と、二値画像B4で表す造影血管領域周辺領域と、は異なる特性を持つと考えられるためである。すなわち、二値画像B4で表す造影血管周辺領域は、ライブ像では造影血管領域が存在せず、マスク像でも造影血管領域が存在しないため、理想的な位置合わせが行われたシフト量では評価値はゼロになる。一方、二値画像B2で表す造影血管領域は、ライブ像では造影血管領域が存在し、マスク像では造影血管領域が存在しないため、式7のような画素値の比較に基づく評価値では値はゼロにはならない。このため、寄与度をa<bのように設定することでより好ましい評価値を得ることができる。

また、式8のように、二値画像B2,B4にそれぞれ関数f,gを用いて評価値を求めても良い。例えば、二値画像B4で表される造影血管周辺領域に関しては、式7と同様に画素値に基づく評価値を算出するように関数gを定義する。一方、二値画像B2で表される造影血管領域に関しては、造影剤の有無を考慮した画素値ではなく血管内の構造を比較するために、エッジを比較するような関数fを定義すれば良い。位置合わせ処理部115は、ライブ像Lおよびマスク像Mに対してエッジ検出処理を施し、得られたエッジ情報に比較によりライブ像Lおよびマスク像Mの位置合わせを行うことができる。関数fは例えば、次の式9で表すことができる。

式9は、マスク像M’とライブ像Lの注目画素(x,y)における横方向、及び縦方向の微分値を求め、評価値とするものである。
(第二のサブトラクション像の生成)
次に、ステップS205で説明した第二のサブトラクション像の生成処理を説明する。第二の画像間差分処理部112は、ライブ像Lからこの位置合わせ済みマスク像M’を差分して第二のサブトラクション像S2を生成する(式10)。このとき、位置合わせ済みマスク像M’においてdummy値とした画素(x-i<0,x-i≧W,y-j<0,y-j≧H)は、第二のサブトラクション像においてもdummy値とする。
次に、ステップS205で説明した第二のサブトラクション像の生成処理を説明する。第二の画像間差分処理部112は、ライブ像Lからこの位置合わせ済みマスク像M’を差分して第二のサブトラクション像S2を生成する(式10)。このとき、位置合わせ済みマスク像M’においてdummy値とした画素(x-i<0,x-i≧W,y-j<0,y-j≧H)は、第二のサブトラクション像においてもdummy値とする。

以上の説明では、位置合わせ手法として、ピクセルシフトを用いる場合について説明したが、位置合わせ手法はピクセルシフトを用いる手法に限定されるものではない。例えば、マスク像生成とライブ像撮影の間に生じた被写体の動きによっては、回転、拡大または縮小等、パラメトリックな画像変形を用いても良い。また、マスク像とライブ像にそれぞれメッシュ状に制御点を配置し、各制御点においてマスク像とライブ像との間で対応関係を求め、制御点の移動と制御点間の画素値の補間を行うワーピングなどの非剛体レジストレーションを用いても良い。位置合わせ処理部115は、マスク像Mおよびライブ像Lを、それぞれ複数のメッシュに分割し、メッシュの節点を示す制御点をマスク像Mとライブ像Lとの間で対応づける。そして、位置合わせ処理部115は、制御点の移動量と、制御点以外のメッシュの位置については制御点間の移動量から補間した値と、を用いた非剛体レジストレーション処理により、マスク像およびライブ像の位置合わせを行うことも可能である。位置合わせ処理部115は、線状領域と周辺領域の位置の比較結果を用いた非剛体レジストレーション処理により、マスク像およびライブ像の間で対応する位置の移動量と、対応する位置の間を補間した移動量と、を補正量として取得する。取得した補正量に基づき、位置合わせ処理部115は、ライブ像およびマスク像の位置合わせを行うことが可能である。
また、上記の説明では、マスク像生成部110においてマスク像を一枚生成し、ライブ像との位置合わせを行う方法を説明した。しかし、マスク像を予め複数枚生成し、ライブ像との位置合わせの代わりに最も位置ずれの少ないマスク像を選択しても良い。すなわち、異なる画像から生成したN枚のマスクMn(n=1,...,N)が画像記憶部106に保存されている時、最適なマスク像を選択するための評価値は、式8と同様の関数f,gを用いて次の式11で表すことができる。

このとき、評価値E(n)を最小にするマスクMnが、第二の画像間差分処理部112への入力となる。
さらに、マスク像の選択と位置合わせの両方を行うことで最適な位置合わせを行うものとしても良く、このとき、評価値は次の式12で表すことができる。

式12においては、評価値E(i,j,n)を最小にするマスクMn、及びシフト量i,jで位置合わせされた画像が、第二の画像間差分処理部112への入力となる。
本実施形態では、ライブ像とマスク像との間の位置合わせを、第一のサブトラクション像から取得した造影血管領域とその周辺の画素に基づいて行う。これにより、特に臨床上興味のある造影血管領域においてモーションアーチファクトの低減が可能となる。
(第2実施形態)
本実施形態では、X線画像処理装置100において、画像記憶部106に保存したX線動画像に対し、再度のモーションアーチファクトの低減を行う場合について説明する。X線画像処理装置100は、第1実施形態で説明したX線動画撮影により得られたX線画像とマスク像とを画像記憶部106に保存しているものとする。
本実施形態では、X線画像処理装置100において、画像記憶部106に保存したX線動画像に対し、再度のモーションアーチファクトの低減を行う場合について説明する。X線画像処理装置100は、第1実施形態で説明したX線動画撮影により得られたX線画像とマスク像とを画像記憶部106に保存しているものとする。
X線画像処理装置100は、操作部107を介したユーザからの指示により、保存されているX線動画の再生、停止、コマ送り、コマ戻しなどの表示フレームの変更指定が可能である。また、X線画像処理装置100は、操作部107を介したユーザからの指示により、マスク像として使うフレーム番号などの条件を変更することが可能である。X線画像処理装置100は、変更された条件に従い、画像記憶部106に保存されているX線画像をマスク像生成部110に入力する。マスク像生成部110は入力されたX線画像から新たな条件に従ってマスク像Mを生成し、画像記憶部106にマスク像Mとして出力する。
X線画像処理装置100は、操作部107を介したユーザからの表示フレームあるいはマスク像Mの変更指示に従い、表示するDSA像の更新を行う。すなわち、ユーザにより指示された新しいフレームをライブ像Lとし、新しいマスク像Mと合わせて第一の画像間差分処理部111への入力とする。
第一の画像間差分処理部111は、この新しいライブ像Lからマスク像Mを画像間差分した第一のサブトラクション像を生成し、表示部109に表示する。あるいは、X線画像処理装置100は、この新しい入力に対して図2に示すフローチャートで説明したDSA像生成処理を適用し、生成したDSA像(第二のサブトラクション像)を表示部109に表示しても良い。
また、X線画像処理装置100は、操作部107を介したユーザからの指示により、表示しているDSA像の関心領域の設定が可能である。ここで、ユーザからの指示は様々な方法が考えられる。ここでは、表示部109に表示しているサブトラクション像上で、操作部107のマウスポインタにより画素を座標指定するものとする。
操作部107を介したユーザからの指示により再度のモーションアーチファクト低減を行う処理を、図4に示すフローチャートを用いてさらに説明する。
ステップS401において、X線画像処理装置100は、操作部107を介したユーザからの指示に基づいて再度のモーションアーチファクト低減を行うサブトラクション像を生成するためのライブ像Lとマスク像Mとの組を画像記憶部106から読み出す。
ステップS402において、X線画像処理装置100は読み出されたライブ像Lとマスク像Mからサブトラクション像を生成し、表示部109にて表示する。このサブトラクション像は、第一の画像間差分処理部111の出力である第一のサブトラクション像でも良いし、図2に示すDSA像生成処理を経た第二のサブトラクション像でも良い。以降の説明では、単にサブトラクション像と呼ぶ。
ステップS403において、X線画像処理装置100は、操作部107を介したユーザからの指示に基づいてサブトラクション像で座標指定された画素を取得する。ここで座標指定される画素はサブトラクション像の造影血管領域内の一画素単位とする。
ステップS404において、X線画像処理装置100は、サブトラクション像と座標指定された画素を、第一の領域取得処理部113に入力し、第一の領域取得処理部113は造影血管領域を取得して出力する。
ステップS405において、X線画像処理装置100は、サブトラクション像と第一の領域取得処理部113が出力する造影血管領域を、第二の領域取得処理部114に入力し、第二の領域取得処理部114は造影血管周辺領域を取得して出力する。
ステップS406において、X線画像処理装置100は、造影血管領域、造影血管周辺領域、ステップS401にて読み出されたライブ像Lとマスク像Mを、位置合わせ処理部115に入力する。位置合わせ処理部115は、造影血管領域と造影血管周辺領域において、ライブ像Lとマスク像Mにおける画素間(画素集合間)の位置ずれを最小にする補正量を求め、ライブ像Lおよびマスク像Mの位置合わせを行う。位置合わせ処理部115は、位置合わせ処理として、例えば、マスク像を基準として、ライブ像をマスク像に対して位置合わせする。あるいは、位置合わせ処理部115は、位置合わせ処理として、例えば、ライブ像を基準として、マスク像をライブ像に対して位置合わせする。あるいは、位置合わせ処理部115は、ライブ像およびマスク像の両方を変形し、両者の位置合わせを行うものであってもよい。本実施形態では、説明を簡単にするために、ライブ像Lを基準として、マスク像Mをライブ像Lに対して位置合わせすることで位置合わせ済みマスク像M’’を取得し、位置合わせ処理部115の出力とする場合を説明する。
ステップS407において、X線画像処理装置100は、ライブ像と位置合わせ済みマスク像の組を第二の画像間差分処理部112に入力する。第二の画像間差分処理部112は、ライブ像Lから位置合わせ済みマスク像M’’を差分することで第三のサブトラクション像を生成し、出力する。
X線画像処理装置100は、この第三のサブトラクション像をDSA像として、表示部109に入力し、表示部109はDSA像の表示を行う。
(造影血管領域の取得)
本実施形態のステップS404における、ユーザから指定された座標に基づく造影血管領域の取得は、様々な手法を用いることができる。ここでは、座標指定された画素を開始点とした領域拡張法により、取得対象の二値画像B5を取得する手法を、図5に示すフローチャートを用いてさらに説明する。取得対象の二値画像B5において、造影血管領域には1が設定され、それ以外の背景領域には0が設定される。
本実施形態のステップS404における、ユーザから指定された座標に基づく造影血管領域の取得は、様々な手法を用いることができる。ここでは、座標指定された画素を開始点とした領域拡張法により、取得対象の二値画像B5を取得する手法を、図5に示すフローチャートを用いてさらに説明する。取得対象の二値画像B5において、造影血管領域には1が設定され、それ以外の背景領域には0が設定される。
ステップS501において、第一の領域取得処理部113は、サブトラクション像Sにおいて座標指定された画素(x0,y0)の画素値S(x0,y0)を参照画素値V0として取得する。第一の領域取得処理部113は、参照画素値V0として、画素値S(x0,y0)をそのまま用いることが可能である。また、第一の領域取得処理部113は、以下の式13に従って、ノイズを考慮して画素(x0,y0)の周辺画素(x-W~x+W,y-W~y+W)の画素値の平均値を算出して用いることも可能である。

ステップS502において、第一の領域取得処理部113は、二値画像B5において、画素(x0,y0)の画素値を1、それ以外の背景領域を0で初期化する。さらに、第一の領域取得処理部113は、画素(x0、y0)を、先入れ先出しを行うデータ構造であるキューに入れる。
ステップS503において、第一の領域取得処理部113は、キューから画素を一つ取り出し、注目画素Pt=(xt,yt)とする。
ステップS504において、第一の領域取得処理部113は、座標指定された画素を始点とした注目画素Ptの近傍画素Pnを取得する。ここでは説明を簡単にするために近傍画素は上下左右の4近傍Pn(1≦n≦4)、P1=(xt、yt-1),P2=(xt、yt+1),P3=(xt-1、yt),P4=(xt+1、yt)とする。
ステップS505において、第一の領域取得処理部113は、近傍画素Pnの二値画像上B5での画素値B5n=B5(Pn)と、近傍画素Pnに対応するサブトラクション像Sの画素の画素値Vn(第一の差分画像上の画素の画素値)を取得する。第一の領域取得処理部113は、サブトラクション像Sの画素値Vnとして、画素の値をそのまま用いて、Vn=S(Pn)として用いることが可能である。また、第一の領域取得処理部113は、サブトラクション像Sの画素値Vnとして、式13に従い、ノイズを考慮して近傍画素Pnの周辺画素の画素値の平均値を用いることも可能である。
ステップS506において、第一の領域取得処理部113は、B5nとVn(1≦n≦4)の値に基づき、二値画像B5の値の更新を行う。第一の領域取得処理部113は、例えば、次の式14のように二値画像B5の値の更新を行う。

ここで、| |は絶対値記号であり、Trangeは撮影条件や使用する造影剤濃度を考慮して定められる閾値である。式14を用いれば、二値画像B5の値が0から1に更新されるのは、更新前の値であるB5nが0であり、かつVnの値が、画素Pnが取得対象である造影血管領域らしい特徴を持つと判定される画素である。更に、式14において二値画像B5の値が0から1に更新された画素Pnは、新しくキューに追加される。すなわち、本実施形態では、第一の領域取得処理部113は、ステップS501で求めた参照画素値V0との差の絶対値が所定の閾値Trangeに収まる場合、造影血管領域らしい特徴を持つと判定する。第一の領域取得処理部113は二値画像B5の値の更新、及びキューへの画素の追加を行う。
ステップS506において、第一の領域取得処理部113は、キューに画素が入っているか、空になっているかを判定する。キューに画素がある場合(S507-Yes)、第一の領域取得処理部113は処理をステップS503に戻し、ステップS503以降の同様の処理を繰り返す。ステップS507の判定で、キューが空であれば(S507-No)、処理を終了する。
領域拡張処理を用いる手法によれば、第一の領域取得処理部113はユーザが座標指定した画素に連結し、かつ造影血管領域らしい画素値を持つ画素の集合を取得し、二値画像B5として出力する。
以上の説明では、ユーザが座標指定した画像上の一画素を開始点とした領域拡張法による方法を述べたが、本実施形態が意図する造影血管領域の取得手法はこれに限られるものではない。例えば、ユーザが特に位置合わせをしたい造影血管領域の始点と終点の二点を座標指定し、第一の領域取得処理部113は指定された二点に基づいてその間に存在する造影血管領域を取得しても良い。具体的には二点間を結ぶ帯状の領域を領域取得の対象範囲として限定し、上述した閾値処理とモルフォロジ演算に基づく手法や領域拡張法を用いて造影血管領域を取得することが可能である。
また、本実施形態では対象がすでに撮影され画像記憶部106に保存された画像であることから時間的に前後するライブ像を画像記憶部106から読み出して利用することで領域取得処理の取得精度を高めることもできる。具体的には、領域取得の対象フレームの時間的に前後するフレームでは造影血管領域が大きく変動しないことから、各フレームの取得結果がフレーム間で連続することを考慮した領域取得が適用可能である。
本実施形態では、ライブ像とマスク像との間の位置合わせを、ユーザによる簡単な指示に基づいて取得した造影血管領域を用いて行う。これにより、特にユーザが興味のある造影血管領域においてモーションアーチファクトの低減が可能となる。
(第3実施形態)
図1に示した各部は専用のハードウェアにより構成しても良いが、ハードウェアの機能構成をソフトウェアにより実現することも可能である。この場合、図1に示す各部の機能は、情報処理装置にソフトウェアをインストールし、ソフトウェアの実行による画像処理方法を情報処理装置の演算機能を利用して実現することができる。ソフトウェアの実行により、例えば、2次元X線センサ104が出力する動画像の各フレームに対して前処理を行って造影剤流入前後のマスク像M及びライブ像Lを取得する。画像間差分処理工程にてサブトラクション像が取得される。
図1に示した各部は専用のハードウェアにより構成しても良いが、ハードウェアの機能構成をソフトウェアにより実現することも可能である。この場合、図1に示す各部の機能は、情報処理装置にソフトウェアをインストールし、ソフトウェアの実行による画像処理方法を情報処理装置の演算機能を利用して実現することができる。ソフトウェアの実行により、例えば、2次元X線センサ104が出力する動画像の各フレームに対して前処理を行って造影剤流入前後のマスク像M及びライブ像Lを取得する。画像間差分処理工程にてサブトラクション像が取得される。
図6は、情報処理装置のハードウェア構成、及びその周辺機器の構成を示すブロック図である。情報処理装置1000は、撮像装置2000と接続しており、互いにデータ通信が可能な構成となっている。
CPU1010は、RAM1020やROM1030に格納されているプログラムやデータを用いて情報処理装置1000の全体的な制御を行うとともに、プログラムの実行により予め定められた画像処理に関する演算処理を実行することが可能である。
RAM1020は、光磁気ディスク1060やハードディスク1050からロードされたプログラムやデータを一時的に記憶するためのエリアを備える。更にRAM1020は、撮像装置2000から取得したマスク像及びライブ像、サブトラクション像等の画像データを一時的に記憶するためのエリアを備える。また、RAM1020は、CPU1010が各種の処理を実行する際に用いるワークエリアも備える。ROM1030は、情報処理装置1000の設定データや、ブートプログラムなどを格納する。
ハードディスク1050は、OS(オペレーティングシステム)や、図1に示した各部が行う各処理をコンピュータが備えるCPU1010に実行させるためのプログラムやデータを保持している。そして、これらはCPU1010による制御に従って適宜、RAM1020にロードされ、CPU1010(コンピュータ)による処理対象となる。また、マスク像及びライブ像、サブトラクション像のデータをこのハードディスク1050に保存することも可能である。
光磁気ディスク1060は、情報記憶媒体としての一例であり、ハードディスク1050に保存されているプログラムやデータの一部若しくは全部をこの光磁気ディスク1060に格納することが可能である。
マウス1070、キーボード1080は、情報処理装置1000の操作者が操作することで、操作部107による関心領域の座標指定など、各種の指示をCPU1010に対して入力することができる。
プリンタ1090は、表示部109に表示された画像を記録媒体上に印刷出力することが可能である。表示装置1100は、CRTや液晶画面などにより構成されており、CPU1010による処理結果を画像や文字などでもって表示することが可能である。例えば、図1に示した各部により処理され、最終的に表示部109から出力された画像を表示することが可能である。この場合、表示部109は、表示装置1100に画像を表示するための表示制御部として機能する。バス1040は、情報処理装置1000内の各部を繋ぎ、各部の間でデータの送受信を行うことを可能にする。
(撮像装置2000)
次に、撮像装置2000について説明する。撮像装置2000は、例えば、X線透視装置のような、造影剤流入中の動画像を撮像することが可能であり、撮像された画像データは情報処理装置1000に送信される。なお、画像データは複数をまとめて情報処理装置1000に送信するようにしても良いし、撮像の都度、順次、画像データの送信を行うようにしてもよい。
次に、撮像装置2000について説明する。撮像装置2000は、例えば、X線透視装置のような、造影剤流入中の動画像を撮像することが可能であり、撮像された画像データは情報処理装置1000に送信される。なお、画像データは複数をまとめて情報処理装置1000に送信するようにしても良いし、撮像の都度、順次、画像データの送信を行うようにしてもよい。
(その他の実施形態)
また、本発明は、以下の処理を実行することによっても実現される。即ち、上述した実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステム或いは装置に供給し、そのシステム或いは装置のコンピュータ(またはCPUやMPU等)がプログラムを読み出して実行する処理である。
また、本発明は、以下の処理を実行することによっても実現される。即ち、上述した実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステム或いは装置に供給し、そのシステム或いは装置のコンピュータ(またはCPUやMPU等)がプログラムを読み出して実行する処理である。
本発明は上記実施の形態に制限されるものではなく、本発明の精神及び範囲から離脱することなく、様々な変更及び変形が可能である。従って、本発明の範囲を公にするために、以下の請求項を添付する。
本願は、2013年11月13日提出の日本国特許出願特願2013-235387を基礎として優先権を主張するものであり、その記載内容の全てを、ここに援用する。
Claims (23)
- 造影剤流入前の被写体を撮像したマスク像と造影剤流入後のライブ像との間で差分処理を行うことで第一の差分画像を生成する第一の差分処理手段と、
前記第一の差分画像における画素値の分布を用いて、造影剤が流入した領域を示す線状領域を取得する第一の取得処理手段と、
前記線状領域に隣接する画素の画素値を用いて、前記線状領域の周辺領域を前記第一の差分画像から取得する第二の取得処理手段と、
前記線状領域と前記周辺領域とを用いた位置の比較により、前記ライブ像および前記マスク像の画素間の位置合わせを行う位置合わせ処理手段と、
を備えることを特徴とするX線画像処理装置。 - 前記位置合わせがなされた、前記ライブ像および前記マスク像の間で差分処理を行うことで第二の差分画像を生成する第二の差分処理手段を更に備えることを特徴とする請求項1に記載のX線画像処理装置。
- 前記位置合わせ処理手段は、
前記位置の比較により、前記ライブ像および前記マスク像における画素間の位置ずれを最小にする補正量を求め、前記補正量を用いて前記ライブ像およびマスク像の位置合わせを行う
ことを特徴とする請求項1または2に記載のX線画像処理装置。 - 前記位置合わせ処理手段は、
前記ライブ像と、画素をずらしたマスク像との間の画素値の差を示す項と、前記線状領域および前記周辺領域に対して異なる重みづけを設定した係数の項と、を有する評価関数を最小にする画素のずらし量を、前記補正量として取得することを特徴とする請求項3に記載のX線画像処理装置。 - 前記位置合わせ処理手段は、
前記補正量に応じて、前記ライブ像およびマスク像の間で対応する画素の位置をずらして、前記ライブ像およびマスク像の位置合わせを行うことを特徴とする請求項3または4に記載のX線画像処理装置。 - 前記位置合わせ処理手段は、
前記補正量に応じて、回転、拡大、または縮小による画像変形により、前記ライブ像およびマスク像の位置合わせを行うことを特徴とする請求項3乃至5のいずれか1項に記載のX線画像処理装置。 - 前記位置合わせ処理手段は、
前記位置の比較結果を用いた非剛体レジストレーション処理により、前記マスク像および前記ライブ像の間で対応する位置の移動量と、前記対応する位置の間を補間した移動量と、を前記補正量として取得して、前記ライブ像およびマスク像の位置合わせを行うことを特徴とする請求項3乃至6のいずれか1項に記載のX線画像処理装置。 - 前記位置合わせ処理手段は、
前記ライブ像および前記マスク像に対してエッジ検出処理を施し、得られたエッジ情報の比較により前記ライブ像および前記マスク像の位置合わせを行うことを特徴とする請求項1乃至7のいずれか1項に記載のX線画像処理装置。 - 前記位置合わせ処理手段は、
前記補正量を用いた位置合わせ処理として、前記マスク像を基準として、前記ライブ像を前記マスク像に対して位置合わせすることを特徴とする請求項3乃至7のいずれか1項に記載のX線画像処理装置。 - 前記位置合わせ処理手段は、
前記補正量を用いた位置合わせ処理として、前記ライブ像を基準として、前記マスク像を前記ライブ像に対して位置合わせすることを特徴とする請求項3乃至7のいずれか1項に記載のX線画像処理装置。 - 前記位置合わせ処理手段は、前記補正量を用いた位置合わせ処理として、前記ライブ像および前記マスク像を変形し、前記ライブ像および前記マスク像の位置合わせを行うことを特徴とする請求項3乃至7のいずれか1項に記載のX線画像処理装置。
- 前記位置合わせ処理手段は、
前記線状領域と前記周辺領域とを用いた位置の比較により、複数のマスク像の中から、前記ライブ像との間の位置ずれが最も小さくなるマスク像を選択し、
前記第二の差分処理手段は、
前記ライブ像および前記選択されたマスク像の間で差分処理を行うことで前記第二の差分画像を生成する
ことを特徴とする請求項2に記載のX線画像処理装置。 - 前記第一の取得処理手段は、
前記第一の差分画像における画素値の分布から最頻値となる画素値を、前記前記第一の差分画像の背景領域の画素値として算出する算出手段と、
前記背景領域の画素値を閾値とした閾値処理により、前記線状領域および前記周辺領域を表す二値画像を取得する閾値処理手段と、
を有することを特徴とする請求項1に記載のX線画像処理装置。 - 前記第一の取得処理手段は、
前記二値画像において孤立した線状領域を示す画素を、前記背景領域を示す画素に置き換える収縮処理を行う収縮処理手段を更に有することを特徴とする請求項13に記載のX線画像処理装置。 - 前記第一の取得処理手段は、
前記閾値処理手段により取得された前記二値画像、または、前記収縮処理が行われた前記二値画像に対して、前記線状領域に隣接する背景領域を示す画素を、前記線状領域を示す画素に置き換える膨張処理を行う膨張処理手段を更に有することを特徴とする請求項14に記載のX線画像処理装置。 - 前記第一の取得処理手段は、
前記第一の差分画像において座標指定された画素の画素値を参照画素値として取得する取得手段と、
取得対象の二値画像の画素値を初期化する初期化手段と、
前記座標指定された画素を始点とした注目画素を取得する取得手段と、
前記注目画素の近傍画素を取得する取得手段と、
前記近傍画素の二値画像上の画素値と、前記近傍画素に対応する前記第一の差分画像上の画素の画素値とを取得する取得手段と、
前記第一の差分画像上の画素の画素値と参照画素値との比較結果、および前記二値画像上の画素値、を用いて、前記二値画像上の画素値の値を更新する更新手段と、
を有することを特徴とする請求項13乃至15のいずれか1項に記載のX線画像処理装置。 - 前記参照画素値は、前記座標指定された画素の周辺画素の画素値の平均値として取得されることを特徴とする請求項16に記載のX線画像処理装置。
- 前記近傍画素の周辺画素の画素値の平均値を用いて、前記第一の差分画像上の画素の画素値は取得されることを特徴とする請求項16に記載のX線画像処理装置。
- 前記第二の取得処理手段は、
前記膨張処理手段から出力された二値画像に対して、前記膨張処理を行う第二の膨張処理手段と、
前記第二の膨張処理手段で前記膨張処理された二値画像から、前記膨張処理手段で前記膨張処理された二値画像を差分することで、前記周辺領域を取得する差分処理手段と、
を更に有することを特徴とする請求項15に記載のX線画像処理装置。 - 前記第一の差分画像あるいは前記第二の差分画像を表示する表示手段と、
前記表示手段に表示された画像上の一部の画素を指定する指定手段と、
を更に備え、
前記第一の取得処理手段は、前記第一の差分画像における画素値の分布および前記指定された画素を用いて、前記線状領域を取得し、
前記第二の領域取得手段は、前記線状領域に隣接する画素の画素値および前記指定された画素の画素値を用いて、前記線状領域の周辺領域を前記第一の差分画像から取得し、
前記位置合わせ処理手段は、前記線状領域と前記周辺領域とを用いた位置の比較により、前記ライブ像および前記マスク像の画素間の位置合わせを行い、
前記第二の差分処理手段は、前記位置合わせがなされた、前記ライブ像および前記マスク像の間で差分処理を行うことで前記第二の差分画像を生成することを特徴とする請求項2に記載のX線画像処理装置。 - X線画像処理方法であって、
造影剤流入前の被写体を撮像したマスク像と造影剤流入後のライブ像との間で差分処理を行うことで第一の差分画像を生成する第一の差分処理工程と、
前記第一の差分画像における画素値の分布を用いて、造影剤が流入した領域を示す線状領域を取得する第一の取得処理工程と、
前記線状領域に隣接する画素の画素値を用いて、前記線状領域の周辺領域を前記第一の差分画像から取得する第二の取得処理工程と、
前記線状領域と前記周辺領域とを用いた位置の比較により、前記ライブ像および前記マスク像の画素間の位置合わせを行う位置合わせ処理工程と、
を有することを特徴とするX線画像処理方法。 - 前記位置合わせがなされた、前記ライブ像および前記マスク像の間で差分処理を行うことで第二の差分画像を生成する第二の差分処理工程を更に有することを特徴とする請求項21に記載のX線画像処理方法。
- コンピュータを、請求項1乃至20のいずれか1項に記載のX線画像処理装置の各手段として機能させるためのプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/140,652 US10217230B2 (en) | 2013-11-13 | 2016-04-28 | X-ray image processing apparatus, X-ray image processing method, and storage medium |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013235387A JP6371515B2 (ja) | 2013-11-13 | 2013-11-13 | X線画像処理装置、x線画像処理方法、及びプログラム |
| JP2013-235387 | 2013-11-13 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US15/140,652 Continuation US10217230B2 (en) | 2013-11-13 | 2016-04-28 | X-ray image processing apparatus, X-ray image processing method, and storage medium |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2015072062A1 true WO2015072062A1 (ja) | 2015-05-21 |
Family
ID=53057018
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2014/004977 WO2015072062A1 (ja) | 2013-11-13 | 2014-09-29 | X線画像処理装置、x線画像処理方法、及びプログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10217230B2 (ja) |
| JP (1) | JP6371515B2 (ja) |
| WO (1) | WO2015072062A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10147171B2 (en) * | 2016-09-21 | 2018-12-04 | General Electric Company | Systems and methods for generating subtracted images |
| US11058385B2 (en) | 2017-07-26 | 2021-07-13 | Canon U.S.A., Inc. | Method for evaluating cardiac motion using an angiography image |
| US11139069B2 (en) | 2018-06-26 | 2021-10-05 | Canon Medical Systems Corporation | Medical image diagnostic apparatus, image processing apparatus, and registration method |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006187511A (ja) * | 2005-01-07 | 2006-07-20 | Hitachi Medical Corp | X線撮像装置 |
| JP2008212241A (ja) * | 2007-02-28 | 2008-09-18 | Toshiba Corp | X線診断装置及び画像表示方法 |
| JP2011245158A (ja) * | 2010-05-28 | 2011-12-08 | Toshiba Corp | X線画像診断装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4559557A (en) * | 1984-06-01 | 1985-12-17 | General Electric Company | Region-of-interest digital subtraction angiography |
| FR2645300B1 (fr) * | 1989-03-29 | 1994-09-09 | Gen Electric Cgr | Procede de recalage automatique d'images |
| WO1994018639A1 (en) * | 1993-02-09 | 1994-08-18 | Siemens Medical Systems, Inc. | Method and apparatus for generating well-registered subtraction images for digital subtraction angiography |
| US7310437B2 (en) * | 2000-03-08 | 2007-12-18 | Fujifilm Corporation | Image processing method and system, and storage medium |
| FR2885717B1 (fr) * | 2005-05-16 | 2007-08-03 | Gen Electric | Procede d'estimation de correction d'une image et dispositif d'angiographie le mettant en oeuvre |
| JP5085031B2 (ja) * | 2005-11-10 | 2012-11-28 | 株式会社東芝 | X線アンギオ撮影装置 |
| US7522701B2 (en) * | 2005-12-20 | 2009-04-21 | General Electric Company | System and method for image composition using position sensors |
| JP5161427B2 (ja) | 2006-02-20 | 2013-03-13 | 株式会社東芝 | 画像撮影装置、画像処理装置及びプログラム |
| US8023732B2 (en) * | 2006-07-26 | 2011-09-20 | Siemens Aktiengesellschaft | Accelerated image registration by means of parallel processors |
| JP5197140B2 (ja) | 2008-05-07 | 2013-05-15 | キヤノン株式会社 | X線透視装置、動画処理方法、プログラム及び記憶媒体 |
| CN102548478B (zh) * | 2009-09-29 | 2014-12-03 | 皇家飞利浦电子股份有限公司 | 血管处置的实况配准 |
| JP5631030B2 (ja) | 2010-03-16 | 2014-11-26 | キヤノン株式会社 | 放射線画像処理装置、画像処理方法、放射線撮影システムおよびプログラム |
| JP6021420B2 (ja) | 2012-05-07 | 2016-11-09 | キヤノン株式会社 | 画像処理装置、画像処理方法およびプログラム |
| JP6071444B2 (ja) | 2012-11-07 | 2017-02-01 | キヤノン株式会社 | 画像処理装置及びその作動方法、プログラム |
-
2013
- 2013-11-13 JP JP2013235387A patent/JP6371515B2/ja active Active
-
2014
- 2014-09-29 WO PCT/JP2014/004977 patent/WO2015072062A1/ja active Application Filing
-
2016
- 2016-04-28 US US15/140,652 patent/US10217230B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006187511A (ja) * | 2005-01-07 | 2006-07-20 | Hitachi Medical Corp | X線撮像装置 |
| JP2008212241A (ja) * | 2007-02-28 | 2008-09-18 | Toshiba Corp | X線診断装置及び画像表示方法 |
| JP2011245158A (ja) * | 2010-05-28 | 2011-12-08 | Toshiba Corp | X線画像診断装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6371515B2 (ja) | 2018-08-08 |
| US20160253803A1 (en) | 2016-09-01 |
| US10217230B2 (en) | 2019-02-26 |
| JP2015093131A (ja) | 2015-05-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4600209B2 (ja) | 画像処理方法、画像処理装置、プログラムおよび記録媒体 | |
| JP5643304B2 (ja) | 胸部トモシンセシスイメージングにおけるコンピュータ支援肺結節検出システムおよび方法並びに肺画像セグメント化システムおよび方法 | |
| JP4342493B2 (ja) | 手ぶれ補正装置 | |
| JP2004105737A (ja) | 心臓磁気共振潅流データのための統合的画像記録方法 | |
| JP6594170B2 (ja) | 画像処理装置、画像処理方法、画像投影システムおよびプログラム | |
| JP2012208553A (ja) | 画像処理装置、および画像処理方法、並びにプログラム | |
| JP6071444B2 (ja) | 画像処理装置及びその作動方法、プログラム | |
| JP6371515B2 (ja) | X線画像処理装置、x線画像処理方法、及びプログラム | |
| WO2019220825A1 (ja) | 胸部x線画像の階調変換方法、画像階調変換プログラム、画像階調変換装置、サーバ装置、及び変換方法 | |
| JP2021133247A5 (ja) | ||
| JP6016403B2 (ja) | 画像処理装置、画像処理方法 | |
| JP2018000926A (ja) | 動態解析システム | |
| JP6185023B2 (ja) | 断層画像生成装置、方法およびプログラム | |
| JP5146159B2 (ja) | 画像復元方法、画像復元プログラム、および画像復元装置 | |
| JP2005270635A (ja) | 画像処理方法及び処理装置 | |
| JP5051025B2 (ja) | 画像生成装置、プログラム、および画像生成方法 | |
| JP2005136594A (ja) | 画像処理装置及びその制御方法 | |
| US9251576B2 (en) | Digital image subtraction | |
| JP6789620B2 (ja) | 画像処理装置及びその制御方法、コンピュータプログラム | |
| JP6383145B2 (ja) | 画像処理装置、画像処理装置の制御方法およびプログラム | |
| JP6854629B2 (ja) | 画像処理装置、画像処理方法 | |
| JP2006247293A (ja) | 画像処理方法および画像処理装置ならびにプログラム | |
| JP2006026396A (ja) | 画像処理装置及び方法、制御プログラム並びに記憶媒体 | |
| JP2007075150A (ja) | 画像データ処理装置および画像データ処理方法 | |
| JPWO2018212272A1 (ja) | 画像処理装置、画像処理プログラム及び画像処理方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 14861258 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 14861258 Country of ref document: EP Kind code of ref document: A1 |