WO2014181870A1 - X線診断装置及び穿刺針挿入支援方法 - Google Patents
X線診断装置及び穿刺針挿入支援方法 Download PDFInfo
- Publication number
- WO2014181870A1 WO2014181870A1 PCT/JP2014/062499 JP2014062499W WO2014181870A1 WO 2014181870 A1 WO2014181870 A1 WO 2014181870A1 JP 2014062499 W JP2014062499 W JP 2014062499W WO 2014181870 A1 WO2014181870 A1 WO 2014181870A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- puncture needle
- unit
- ray
- image
- imaging
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images













Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/12—Arrangements for detecting or locating foreign bodies
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/44—Constructional features of apparatus for radiation diagnosis
- A61B6/4429—Constructional features of apparatus for radiation diagnosis related to the mounting of source units and detector units
- A61B6/4435—Constructional features of apparatus for radiation diagnosis related to the mounting of source units and detector units the source unit and the detector unit being coupled by a rigid structure
- A61B6/4441—Constructional features of apparatus for radiation diagnosis related to the mounting of source units and detector units the source unit and the detector unit being coupled by a rigid structure the rigid structure being a C-arm or U-arm
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/46—Arrangements for interfacing with the operator or the patient
- A61B6/461—Displaying means of special interest
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/46—Arrangements for interfacing with the operator or the patient
- A61B6/467—Arrangements for interfacing with the operator or the patient characterised by special input means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/48—Diagnostic techniques
- A61B6/486—Diagnostic techniques involving generating temporal series of image data
- A61B6/487—Diagnostic techniques involving generating temporal series of image data involving fluoroscopy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/52—Devices using data or image processing specially adapted for radiation diagnosis
- A61B6/5211—Devices using data or image processing specially adapted for radiation diagnosis involving processing of medical diagnostic data
- A61B6/5217—Devices using data or image processing specially adapted for radiation diagnosis involving processing of medical diagnostic data extracting a diagnostic or physiological parameter from medical diagnostic data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/52—Devices using data or image processing specially adapted for radiation diagnosis
- A61B6/5211—Devices using data or image processing specially adapted for radiation diagnosis involving processing of medical diagnostic data
- A61B6/5229—Devices using data or image processing specially adapted for radiation diagnosis involving processing of medical diagnostic data combining image data of a patient, e.g. combining a functional image with an anatomical image
- A61B6/5247—Devices using data or image processing specially adapted for radiation diagnosis involving processing of medical diagnostic data combining image data of a patient, e.g. combining a functional image with an anatomical image combining images from an ionising-radiation diagnostic technique and a non-ionising radiation diagnostic technique, e.g. X-ray and ultrasound
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H50/00—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics
- G16H50/30—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics for calculating health indices; for individual health risk assessment
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2065—Tracking using image or pattern recognition
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/376—Surgical systems with images on a monitor during operation using X-rays, e.g. fluoroscopy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/54—Control of apparatus or devices for radiation diagnosis
Definitions
- the system control unit 10 includes a CPU (Central Processing Unit) and a semiconductor memory.
- the system control unit 10 temporarily stores information input to the X-ray diagnostic apparatus 1 via the input unit 11 in a semiconductor memory.
- the system control unit 10 controls each unit of the X-ray diagnostic apparatus 1 based on the input information.
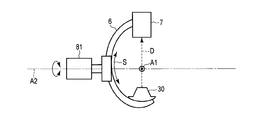
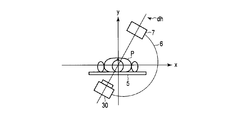
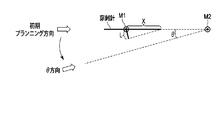
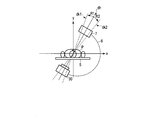
- the first projection direction is a direction along the insertion direction of the puncture needle.
- the second projection direction is a direction orthogonal to the insertion direction of the puncture needle.
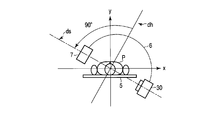
- the shooting center line dh and the shooting center line dk form an angle ⁇ .
- the angle ⁇ can be set to an angle of about 3 ° to 10 °, for example.
- the user can set and change the tilt angle ⁇ via, for example, the input unit 11.
- the input unit 11 inputs the insertion target position and the arrival target position to the X-ray diagnostic apparatus 1. These inputs are performed by a user operation on the insertion condition setting screen displayed on the display unit 12.
- the insertion target position is set on the body surface of the subject P.
- the insertion target position is a position where the puncture needle is inserted into the subject P.
- the reaching target position is set inside the subject P.
- the reaching target position is a position for reaching the tip of the puncture needle.
- the insertion condition input screen includes a cross-sectional image related to the subject P and a determination button.
- the cross-sectional image related to the subject P is generated by performing projection processing on the volume data related to the subject P by the image processing unit 16. Volume data relating to the subject P is stored in the data storage unit 14.
- FIG. 11 is a diagram illustrating an example of a support image generated by the support image generation unit 21 according to the first embodiment.
- the support image 102 is generated by the support image synthesis unit 216.
- the support image 102 is an image obtained by synthesizing the puncture needle model image NM, the insertion position marker M1, and the arrival position marker M2 with the image related to the subject P.
- the support image composition unit 216 arranges the insertion position marker M1 at the insertion target position on the image related to the subject P, and arranges the arrival position marker M2 at the arrival target position.
- the support image synthesis unit 216 arranges the puncture needle model image NM so as to correspond to the position of the puncture needle image NI extracted by the puncture needle extraction unit 212.
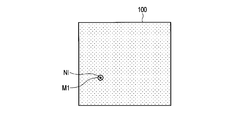
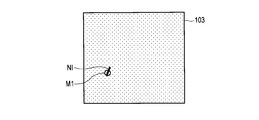
- FIG. 13 is a diagram showing an example of a fluoroscopic image corresponding to the parallel mode in the second embodiment.
- the perspective image 103 shown in FIG. 13 is taken from the initial planning direction.
- the illustrated fluoroscopic image 103 includes an insertion position marker M1 indicating the insertion target position.
- the puncture needle image NI is represented in a straight line instead of a point.
- the puncture needle image NI may be curved instead of linear.
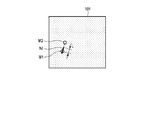
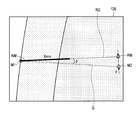
- FIG. 15 is an explanatory diagram for explaining a method of determining the rotation direction by the rotation direction determination unit 23.
- FIG. 15 is a diagram showing the central axis C of the puncture needle image NI and the rotation direction R in the fluoroscopic image 105 shown in FIG.
- the rotation direction determination unit 23 obtains the center axis C of the puncture needle image NI.
- the central axis C is, for example, an approximate straight line having each pixel constituting the puncture needle image NI as an element.
- the puncture needle image NI has an oval or rectangular shape. Therefore, the central axis C is an elliptical long axis or a rectangular long axis.
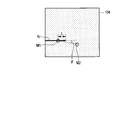
- the shift angle ⁇ indicates how much the puncture needle that should have been inserted straight from the insertion target position to the target position is inserted at a bent angle.
- a procedure for specifying the insertion deviation angle ⁇ will be described with reference to a fluoroscopic image 104 shown in FIG.
- the deviation amount specifying unit 217 specifies an angle ⁇ ′ formed by the insertion guideline connecting the insertion position marker M1 and the arrival position marker M2 and the central axis of the puncture needle image NI.
- the angle ⁇ ′ represents an apparent shift angle in the fluoroscopic image.
- step S412 When the parallel switch is pressed (YES in step S412), the imaging control unit 17 controls the C arm driving mechanism 8 so that the imaging unit 40 returns to the position corresponding to the parallel mode, and the C arm 6 is set to ⁇ 90. Rotate (step S413). Then, the photographing unit 40 is returned to the position corresponding to the parallel mode. After step S413, the process proceeds to step S404. Then, the processing from step S404 to step S413 is repeatedly executed until the puncturing operation by the user while performing fluoroscopy is completed (NO in step S414). When the puncturing operation is finished and the fluoroscopic switch is released, the second example of a series of workflows using the X-ray diagnostic apparatus 1 according to the second embodiment is finished (YES in step S414).
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Pathology (AREA)
- Optics & Photonics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Veterinary Medicine (AREA)
- Animal Behavior & Ethology (AREA)
- Surgery (AREA)
- Physics & Mathematics (AREA)
- Molecular Biology (AREA)
- Biophysics (AREA)
- High Energy & Nuclear Physics (AREA)
- Heart & Thoracic Surgery (AREA)
- Radiology & Medical Imaging (AREA)
- Human Computer Interaction (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physiology (AREA)
- Data Mining & Analysis (AREA)
- Epidemiology (AREA)
- Databases & Information Systems (AREA)
- Primary Health Care (AREA)
- Apparatus For Radiation Diagnosis (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/936,241 US20160058399A1 (en) | 2013-05-09 | 2015-11-09 | X ray diagnostic apparatus and puncture needle insertion assistant method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013-099199 | 2013-05-09 | ||
| JP2013099199A JP6157919B2 (ja) | 2013-05-09 | 2013-05-09 | X線診断装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US14/936,241 Continuation US20160058399A1 (en) | 2013-05-09 | 2015-11-09 | X ray diagnostic apparatus and puncture needle insertion assistant method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2014181870A1 true WO2014181870A1 (ja) | 2014-11-13 |
Family
ID=51867342
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2014/062499 Ceased WO2014181870A1 (ja) | 2013-05-09 | 2014-05-09 | X線診断装置及び穿刺針挿入支援方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20160058399A1 (enExample) |
| JP (1) | JP6157919B2 (enExample) |
| WO (1) | WO2014181870A1 (enExample) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017209333A (ja) * | 2016-05-26 | 2017-11-30 | 株式会社日立製作所 | 放射線治療システム |
| JP2019134917A (ja) * | 2017-12-21 | 2019-08-15 | シーメンス ヘルスケア ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 器具の配置調整時の整列方法とロボットシステム |
| US11464465B2 (en) | 2019-02-13 | 2022-10-11 | Canon Medical Systems Corporation | X-ray diagnosis apparatus and console |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NL2016800B1 (en) * | 2016-05-19 | 2017-12-05 | Umc Utrecht Holding Bv | Method of positioning an interventional device. |
| CN114569201B (zh) * | 2022-02-16 | 2023-11-17 | 佛山市柏康机器人技术有限公司 | 一种图像导航穿刺进针点检测方法及装置 |
| CN116712173B (zh) * | 2023-05-24 | 2025-01-10 | 首都医科大学宣武医院 | 椎弓根穿刺机器人 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001218765A (ja) * | 1999-12-28 | 2001-08-14 | Siemens Ag | 対象物のビジュアル化方法及びシステム |
| JP2002248098A (ja) * | 2000-11-17 | 2002-09-03 | Siemens Ag | 検査対象物における位置を特定するための方法および装置 |
| US20070255292A1 (en) * | 2006-04-28 | 2007-11-01 | Siemens Aktiengesellschaft | X-ray C-arm system, frame for a flat-panel x-ray detector of an x-ray C-arm system and method for technical support of targeting during puncturing of a patient |
| US20080234575A1 (en) * | 2007-03-20 | 2008-09-25 | Siemens Aktiengesellschaft | Method and device for making correction information available |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6505065B1 (en) * | 1999-10-29 | 2003-01-07 | Koninklijke Philips Electronics, N.V. | Methods and apparatus for planning and executing minimally invasive procedures for in-vivo placement of objects |
| JP2006262989A (ja) * | 2005-03-22 | 2006-10-05 | Toshiba Corp | X線診断装置 |
| WO2007012990A2 (en) * | 2005-07-25 | 2007-02-01 | Koninklijke Philips Electronics, N.V. | System and method for providing lateral and frontal x-ray images of a patient |
| GB2480586B (en) * | 2009-02-28 | 2013-04-03 | Univ Stellenbosch | A method for positioning an instrument |
| JP5550355B2 (ja) * | 2010-01-12 | 2014-07-16 | 株式会社東芝 | X線画像診断装置 |
| EP2831841B1 (en) * | 2012-06-20 | 2016-05-18 | Koninklijke Philips N.V. | Multicamera tracking |
| US20140100550A1 (en) * | 2012-10-10 | 2014-04-10 | Christie Digital Systems Canada Inc. | Catheter discrimination and guidance system |
-
2013
- 2013-05-09 JP JP2013099199A patent/JP6157919B2/ja active Active
-
2014
- 2014-05-09 WO PCT/JP2014/062499 patent/WO2014181870A1/ja not_active Ceased
-
2015
- 2015-11-09 US US14/936,241 patent/US20160058399A1/en not_active Abandoned
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001218765A (ja) * | 1999-12-28 | 2001-08-14 | Siemens Ag | 対象物のビジュアル化方法及びシステム |
| JP2002248098A (ja) * | 2000-11-17 | 2002-09-03 | Siemens Ag | 検査対象物における位置を特定するための方法および装置 |
| US20070255292A1 (en) * | 2006-04-28 | 2007-11-01 | Siemens Aktiengesellschaft | X-ray C-arm system, frame for a flat-panel x-ray detector of an x-ray C-arm system and method for technical support of targeting during puncturing of a patient |
| US20080234575A1 (en) * | 2007-03-20 | 2008-09-25 | Siemens Aktiengesellschaft | Method and device for making correction information available |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017209333A (ja) * | 2016-05-26 | 2017-11-30 | 株式会社日立製作所 | 放射線治療システム |
| JP2019134917A (ja) * | 2017-12-21 | 2019-08-15 | シーメンス ヘルスケア ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 器具の配置調整時の整列方法とロボットシステム |
| US10779788B2 (en) | 2017-12-21 | 2020-09-22 | Siemens Healthcare Gmbh | Registration on setting an alignment of an instrument |
| US11464465B2 (en) | 2019-02-13 | 2022-10-11 | Canon Medical Systems Corporation | X-ray diagnosis apparatus and console |
| US12268536B2 (en) | 2019-02-13 | 2025-04-08 | Canon Medical Systems Corporation | X-ray diagnosis apparatus and console |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6157919B2 (ja) | 2017-07-05 |
| US20160058399A1 (en) | 2016-03-03 |
| JP2014217603A (ja) | 2014-11-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102970928B (zh) | 放射线图像拍摄显示方法及系统 | |
| CN102858249B (zh) | X射线图像诊断装置 | |
| CN104244831B (zh) | 医疗用x射线装置 | |
| WO2014181870A1 (ja) | X線診断装置及び穿刺針挿入支援方法 | |
| CN101212931B (zh) | X射线诊断装置 | |
| JP2011036600A (ja) | 画像処理装置、画像処理プログラムおよび医用診断システム | |
| US20150374325A1 (en) | X-ray diagnostic apparatus | |
| CN104244833A (zh) | X射线焦斑移动的方向控制 | |
| US7845851B2 (en) | Low-dose iso-centering | |
| JPWO2015030091A1 (ja) | X線撮影装置およびx線透視画像表示方法 | |
| JP7363878B2 (ja) | 放射線画像表示装置および画像表示方法 | |
| CN112043359A (zh) | 乳腺穿刺方法、装置、设备及存储介质 | |
| JP2007061426A (ja) | X線ct装置及びx線撮影方法 | |
| US20140046177A1 (en) | X-ray radiographic apparatus | |
| JP2014068874A (ja) | 画像表示システム、放射線画像撮影システム、画像表示制御プログラム、及び画像表示制御方法。 | |
| US20140028717A1 (en) | Radiation image displaying apparatus and radiation image displaying method | |
| JP2022112175A (ja) | X線診断装置及び医用画像処理装置 | |
| JP7392478B2 (ja) | 拡大倍率算出装置、長尺撮影システム、プログラム及び拡大倍率算出方法 | |
| JP7565772B2 (ja) | X線撮像装置及び処置具認識方法 | |
| CN110604588A (zh) | X射线图像摄影装置和x射线图像摄影方法 | |
| JP2023073627A (ja) | X線診断装置およびx線画像収集方法 | |
| JP7160529B2 (ja) | 医用画像処理装置、x線診断装置及び医用画像処理方法 | |
| JP2024110691A (ja) | X線診断装置 | |
| JP2017086561A (ja) | 医用画像処理装置及び医用画像処理プログラム | |
| CN104955395A (zh) | X射线诊断装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 14793990 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 14793990 Country of ref document: EP Kind code of ref document: A1 |