WO2012172961A1 - 磁気粘性流体緩衝器 - Google Patents
磁気粘性流体緩衝器 Download PDFInfo
- Publication number
- WO2012172961A1 WO2012172961A1 PCT/JP2012/063708 JP2012063708W WO2012172961A1 WO 2012172961 A1 WO2012172961 A1 WO 2012172961A1 JP 2012063708 W JP2012063708 W JP 2012063708W WO 2012172961 A1 WO2012172961 A1 WO 2012172961A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- cylinder
- magnetorheological fluid
- piston
- magnetic
- shock absorber
- Prior art date
Links
Images


Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16F—SPRINGS; SHOCK-ABSORBERS; MEANS FOR DAMPING VIBRATION
- F16F9/00—Springs, vibration-dampers, shock-absorbers, or similarly-constructed movement-dampers using a fluid or the equivalent as damping medium
- F16F9/32—Details
- F16F9/53—Means for adjusting damping characteristics by varying fluid viscosity, e.g. electromagnetically
- F16F9/535—Magnetorheological [MR] fluid dampers
Definitions
- the present invention relates to a magnetorheological fluid shock absorber using a magnetorheological fluid whose apparent viscosity changes due to the action of a magnetic field.
- Some shock absorbers mounted on vehicles such as automobiles change the damping force by applying a magnetic field to the flow path through which the magnetorheological fluid passes to change the apparent viscosity of the magnetorheological fluid.
- JP 2007-239982A discloses a magnetorheological fluid damper in which permanent magnets are attached to both axial ends of a cylinder in which magnetorheological fluid is sealed.
- a magnetorheological fluid damper In this magnetorheological fluid damper, a yoke material is provided on the outer periphery of a cylinder, and a piston and a part of the piston rod are formed of a ferromagnetic material.
- the magnetic force of the permanent magnet does not act on the magnetorheological fluid.
- the piston strokes beyond the neutral region a magnetic circuit is formed from the permanent magnet through the piston rod, the piston, and the yoke material. As a result, the magnetic force of the permanent magnet acts on the magnetorheological fluid between the piston and the cylinder, and the viscosity of the magnetorheological fluid increases and the damping coefficient increases.
- the present invention has been made in view of the above problems, and in a magnetorheological fluid shock absorber in which a magnet is attached to a cylinder, magnetism is efficiently applied to continuously reduce the damping coefficient with respect to the stroke amount of the piston.
- the purpose is to change.
- a magnetorheological fluid shock absorber using a magnetorheological fluid whose viscosity is changed by the action of a magnetic field is formed by a nonmagnetic material, and the magnetorheological fluid is enclosed in the inner periphery thereof.
- a piston formed by a cylindrical cylinder and a non-magnetic material and slidably disposed in the cylinder with an interval through which the magnetorheological fluid can pass is connected between the cylinder and the piston.
- a piston rod that is attached to the cylinder and causes a magnetic field to act in the cylinder, and the magnet portion is formed by a permanent magnet having an inner peripheral shape along the outer periphery of the cylinder, and a magnetic body. And a ring member disposed on the outer peripheral side of the permanent magnet.
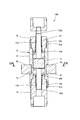
- FIG. 1 is a cross-sectional view of a magnetorheological fluid damper according to a first embodiment of the present invention.
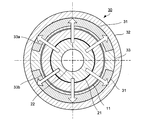
- 2A is a cross-sectional view taken along the line IIA-IIA in FIG.
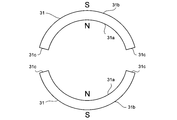
- FIG. 2B is a diagram illustrating a permanent magnet of the magnetorheological fluid shock absorber according to the first embodiment of the present invention.
- FIG. 3 is a graph illustrating the operation of the magnetorheological fluid damper according to the first embodiment of the present invention.
- FIG. 4A is a sectional view of a piston, a cylinder, and a magnet part of a magnetorheological fluid shock absorber according to a second embodiment of the present invention.
- FIG. 4B is a diagram illustrating a permanent magnet of a magnetorheological fluid shock absorber according to the second embodiment of the present invention.
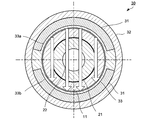
- FIG. 5A is a cross-sectional view of a piston, a cylinder, and a magnet part of a modification of the magnetorheological fluid damper according to the second embodiment of the present invention.
- FIG. 5B is a diagram illustrating a permanent magnet of a modification of the magnetorheological fluid damper according to the second embodiment of the present invention.
- FIG. 1 is a cross-sectional view of a magnetorheological fluid shock absorber 100.
- the magnetorheological fluid shock absorber 100 is a damper capable of changing a damping coefficient with respect to a force applied in the axial direction by using a magnetorheological fluid whose viscosity is changed by the action of a magnetic field.
- the magnetorheological fluid shock absorber 100 is formed such that the damping coefficient thereof changes in proportion to the stroke amount of the piston 21.
- the magnetorheological fluid shock absorber 100 includes a cylindrical cylinder 10 in which a magnetorheological fluid is sealed on the inner periphery thereof, a piston 21 disposed in the cylinder 10 so as to be slidable in the axial direction of the cylinder 10, and a piston The piston rod 22 to which the reference numeral 21 is connected, and the magnet portion 30 that is fixed to the outer periphery of the cylinder 10 and applies a magnetic field to the cylinder 10.
- the magnetorheological fluid sealed in the cylinder 10 changes its apparent viscosity by the action of a magnetic field, and is a liquid in which fine particles having ferromagnetism are dispersed in a liquid such as oil.
- the viscosity of the magnetorheological fluid changes according to the strength of the applied magnetic field, and becomes the minimum when there is no influence of the magnetic field.
- the cylinder 10 includes a cylindrical portion 11 formed in a cylindrical shape having openings at both ends thereof, and a head member 12 and a bottom member 13 attached to the openings at both ends of the cylindrical portion 11.
- the cylindrical part 11 has a screwing part 11a formed on the inner periphery of one opening part and a screwing part 11b formed on the inner periphery of the other opening part.
- a screwing portion 12b that is screwed with the screwing portion 11a of the cylindrical portion 11 is formed.
- a seal member 14a is provided between the inner periphery of the cylindrical portion 11 and the outer periphery of the head member 12, and the magnetorheological fluid in the cylinder 10 is sealed.
- the head member 12 is formed with a hole 12a through which the piston rod 22 is inserted.
- a screwing portion 13b that is screwed with the screwing portion 11b of the cylindrical portion 11 is formed on the outer periphery of the bottom member 13.
- a seal member 14b is provided between the inner periphery of the cylindrical portion 11 and the outer periphery of the bottom member 13, and the magnetorheological fluid in the cylinder 10 is sealed.
- the bottom member 13 is formed with a hole 13a through which the piston rod 22 is inserted.
- the cylinder 10 is formed of a nonmagnetic material. Accordingly, the cylinder 10 is prevented from becoming a magnetic path, and a magnetic field can be efficiently applied from the magnet unit 30 to the magnetorheological fluid sealed in the cylinder 10.
- the cylinder 10 has an annular recess 15 formed on the outer periphery of the cylindrical portion 11 so as to be thinner than other portions of the cylinder 10.
- a magnet unit 30 is fitted around the recess 15.
- the piston 21 is formed in a columnar shape whose outer diameter is smaller than the inner diameter of the cylindrical portion 11 in the cylinder 10. That is, the piston 21 is formed between the inner periphery of the cylindrical portion 11 in the cylinder 10 with an annular interval through which the magnetorheological fluid can pass.
- the magnetorheological fluid shock absorber 100 When the piston 21 slides in the cylinder 10 in the axial direction, the magnetorheological fluid passes through the space between the piston 21 and the cylinder 10.
- the magnetorheological fluid shock absorber 100 generates a damping force by the annular space between the piston 21 and the cylinder 10 acting as a throttle.
- Piston 21 is formed of a non-magnetic material. Thereby, the magnetic field of the magnet part 30 does not act directly on the piston 21, and it is possible to prevent the piston 21 from being brought to one side and increasing the friction.
- the piston rod 22 is formed so as to be coaxial with the piston 21 and is inserted through the center of the piston 21.
- the piston rod 22 is formed integrally with the piston 21.
- the piston rod 22 may be formed separately from the piston 21 and joined by screws or the like.
- One end 22a of the piston rod 22 is inserted into the hole 12a of the head member 12, is slidably supported by the head member 12, and extends to the outside of the cylinder 10.
- the other end 22 b of the piston rod 22 is inserted into the hole 13 a of the bottom member 13 and is slidably supported by the bottom member 13.
- the piston rod 22 is slidably supported by the head member 12 and the bottom member 13, so that even if there is an annular interval between the outer periphery of the piston 21 and the inner periphery of the cylinder 10, The cylinder 10 can slide in the axial direction without being displaced in the radial direction.
- FIG. 2A is a cross-sectional view taken along the line IIA-IIA in FIG.
- FIG. 2B is a diagram illustrating the permanent magnet 31 of the magnetorheological fluid shock absorber 100 according to the first embodiment of the present invention.
- the magnet part 30 has a circular cross section.
- the magnet unit 30 is fitted around the recess 15 of the cylinder 10.
- the recess 15 is formed thinner than the other part of the cylinder 10. Therefore, it does not prevent the magnetic field of the magnet unit 30 from acting on the magnetorheological fluid sealed in the cylinder 10.
- the magnet unit 30 includes a pair of permanent magnets 31, a support member 33 that supports the permanent magnets 31, and an annular magnetic ring member 32 that is fitted around the permanent magnets 31 and the support member 33.
- the permanent magnet 31 has an inner peripheral surface 31a composed of a partial arc of the first circumference centered on the same axis as the center of the cylinder 10, and the same center as the first circumference. Surrounded by an outer peripheral surface 31b made of a partial arc of a second circumference having a larger diameter than the first circumference, and a pair of side surfaces 31c connecting the inner peripheral face 31a and the outer peripheral face 31b. This is a C-shaped segment magnet having an arc shape.
- the pair of permanent magnets 31 are formed in the same shape and are arranged symmetrically with respect to the central axis of the cylinder 10.
- the permanent magnet 31 has a pair of magnetic poles magnetized in the radial direction.
- the permanent magnets 31 are magnetized so that the inner peripheral surface 31a side is an N pole and the outer peripheral surface 31b side is an S pole.
- the pair of permanent magnets 31 are arranged such that their magnetic poles face each other with respect to the central axis of the cylinder 10. That is, the pair of permanent magnets 31 are magnetized in the same direction and are arranged symmetrically with respect to a line segment passing through the central axis of the cylinder 10.
- the inner peripheral side of the support member 33 is formed in a cylindrical shape along the periphery of the annular recess 15.
- a groove 33a and a groove 33b for fixing the permanent magnet 31 to the outer shape on the circumference are formed on the outer peripheral side of the support member 33.
- the support member 33 forms a circle having the same outer circumference as the second circumference described above in a state where the permanent magnets 31 are fixed to the groove 33a and the groove 33b, respectively.
- the support member 33 is formed of a non-magnetic material in the same manner as the cylinder 10. Thereby, it is prevented that the supporting member 33 becomes a magnetic path, and the magnetic field from the magnet part 30 acts on a magnetorheological fluid efficiently.
- An annular magnetic ring member 32 made of a magnetic material is fitted on the outer periphery of the support member 33.
- the magnetic ring member 32 is fitted in close contact with the outer periphery of the support member 33 in a state where the permanent magnets 31 are fixed to the groove 33a and the groove 33b, respectively.
- the magnetic ring member 32 constitutes a magnetic path of a magnetic field generated by the permanent magnet 31.
- the magnetic ring member 32 is formed of a soft magnetic material having a high magnetic permeability and a small coercivity of the residual magnetic field.
- the pair of permanent magnets 31 are fixed separately from each other by the support member 33. That is, in the permanent magnet 31, the center angle of the inner peripheral surface 31a and the outer peripheral surface 31b is set to be less than 180 °. Further, the outer peripheral surface 31 b of the permanent magnet 31 is in close contact with the inner peripheral surface of the magnetic ring member 32.
- the magnet unit 30 generates a magnetic field in the direction indicated by the arrow in FIG. 2A. That is, by arranging the magnetic poles of the pair of permanent magnets 31 to face each other, a radial magnetic force is generated from the central axis of the cylinder 10. This magnetic force acts evenly on the magnetorheological fluid existing in the interval between the piston 21 and the cylinder 10, and can increase the viscosity of the magnetorheological fluid.
- the magnetic ring member 32 made of a magnetic material is disposed outside the permanent magnet 31, the magnetic field directed toward the outer peripheral surface 31b passes through the inside of the magnetic ring member 32 without being diverged. Thereby, a magnetic field can be made to act on a magnetorheological fluid more efficiently.
- the magnet unit 30 is arranged corresponding to the position of the piston 21 when the piston rod 22 enters the cylinder 10 most. Therefore, the viscosity of the magnetorheological fluid in the cylinder 10 differs depending on the position in the axial direction. Specifically, the magnetic viscous fluid in the cylinder 10 is more affected by the magnetic field as it gets closer to the magnet unit 30, and the viscosity increases due to the collection of ferromagnetic particles. On the other hand, as the magnetorheological fluid in the cylinder 10 moves away from the magnet unit 30, the influence of the magnetic field becomes smaller and the viscosity becomes lower.
- the horizontal axis represents the stroke amount S [m], which is the amount of the piston rod 22 entering the cylinder 10, and the vertical axis represents the damping coefficient C [N ⁇ s / m] of the magnetorheological fluid shock absorber 100. is there.
- a straight line X indicates the damping coefficient C of the magnetorheological fluid shock absorber 100
- a straight line Y indicates the magnetorheological fluid in the cylinder 10 without providing the magnet unit 30 in the magnetorheological fluid shock absorber 100.
- the attenuation coefficient C when no magnetic field acts on is shown.
- the attenuation coefficient C in this case is always a constant value with respect to the change in the stroke amount S as shown by the straight line Y.
- the damping coefficient C is the minimum when the stroke amount in which the piston rod 22 is most retracted from the cylinder 10 is S min as shown by the straight line X.
- the stroke amount is S min
- the magnetorheological fluid in the cylinder 10 is affected by the magnetic field by the magnet unit 30 and the ferromagnetic particles are aligned, so the magnet unit 30 is not provided.
- the damping coefficient C is larger.
- the damping coefficient C of the magnetorheological fluid shock absorber 100 can be increased proportionally.
- the cylinder 10 and the piston 21 are formed of a non-magnetic material, and the cylinder 10 is attached with a magnet unit 30 that applies a magnetic field to the magnetorheological fluid in the cylinder 10. Therefore, the cylinder 10 and the piston 21 do not form a magnetic path, and the influence of the magnetic field on the magnetorheological fluid passing through the interval between the cylinder 10 and the piston 21 is caused by the piston 21 strokes to the magnet unit 30. It will gradually increase as you get closer. Therefore, the damping coefficient can be continuously changed with respect to the stroke amount of the piston 21.
- the magnet unit 30 includes a pair of permanent magnets 31 that are C-shaped segment magnets having an inner peripheral shape along the outer peripheral shape of the cylindrical cylinder 10 in which the magnetorheological fluid is enclosed. Thereby, a magnetic field acts on the magnetorheological fluid which exists in the space
- the magnetic ring member 32 of magnetic material is disposed outside the permanent magnet 31, the magnetic field toward the outer peripheral surface 31b passes through the magnetic ring member 32 without being diverged. Thereby, a magnetic field can be made to act on a magnetorheological fluid efficiently.
- FIG. 4A is a cross-sectional view of the cylinder 10 and the magnet unit 30 of the magnetorheological fluid shock absorber according to the second embodiment of the present invention
- FIG. 4B illustrates the magnetorheological fluid shock absorber according to the second embodiment of the present invention. It is a figure explaining the permanent magnet 31.
- FIG. FIG. 4A is a cross-sectional view of the cylinder 10 and the magnet unit 30 of the magnetorheological fluid shock absorber according to the second embodiment of the present invention
- FIG. 4B illustrates the magnetorheological fluid shock absorber according to the second embodiment of the present invention. It is a figure explaining the permanent magnet 31.
- FIG. 5A is a cross-sectional view of a cylinder 10 and a magnet unit 30 of a modification of the magnetorheological fluid shock absorber according to the second embodiment of the present invention
- FIG. 5B is a magnetic diagram according to the second embodiment of the present invention. It is a figure explaining the permanent magnet 31 of the modification of the viscous fluid shock absorber 100.
- FIG. 5A is a cross-sectional view of a cylinder 10 and a magnet unit 30 of a modification of the magnetorheological fluid shock absorber according to the second embodiment of the present invention
- FIG. 5B is a magnetic diagram according to the second embodiment of the present invention. It is a figure explaining the permanent magnet 31 of the modification of the viscous fluid shock absorber 100.
- the magnetic viscous fluid shock absorber according to the second embodiment has the same basic configuration as the magnetic viscous fluid shock absorber 100 according to the first embodiment shown in FIG.
- the magnetorheological fluid shock absorber according to the second embodiment is different from the magnetorheological fluid shock absorber 100 according to the first embodiment only in the configuration of the magnet unit 30.
- the magnet unit 30 is fitted around a pair of permanent magnets 31, a support member 33 that supports the permanent magnets 31, and the permanent magnet 31 and the support member 33. And an annular magnetic ring member 32.
- the permanent magnet 31 is a C-shaped segment magnet.
- the pair of permanent magnets 31 are formed in the same shape and are arranged symmetrically with respect to the central axis of the cylinder 10.
- the permanent magnet 31 has a pair of magnetic poles magnetized in the radial direction.
- one permanent magnet 31 is magnetized so that the inner peripheral surface 31a side is an N pole and the outer peripheral surface 31b side is an S pole.
- the other permanent magnet 31 is magnetized so that the inner peripheral surface 31a side is an S pole and the outer peripheral surface 31b side is an N pole.
- the pair of permanent magnets 31 are arranged so that the respective magnetic poles are opposed to the central axis of the cylinder 10. That is, the magnetic poles of the pair of permanent magnets 31 are different from each other.
- the magnet unit 30 generates a magnetic field in the direction indicated by the arrow in FIG. 4A. That is, by arranging the magnetic poles of the pair of permanent magnets 31 to be opposite to each other, a magnetic force from one permanent magnet 31 toward the other permanent magnet 31 is generated. This magnetic force acts on the magnetorheological fluid existing in the space between the piston 21 and the cylinder 10 to increase the viscosity of the magnetorheological fluid.
- a magnetic field in a direction along the peripheral surface of the cylinder 10 is generated along the peripheral surface of the cylinder 10, particularly near the boundary between the pair of permanent magnets 31. Therefore, the magnetic field can be effectively applied to the magnetorheological fluid.
- the magnetic ring member 32 made of a magnetic material is disposed outside the permanent magnet 31, the magnetic field from one permanent magnet 31 toward the other permanent magnet 31 passes through the magnetic ring member 32 without being diverged. . Thereby, a magnetic field can be made to act on a magnetorheological fluid efficiently.
- the pair of permanent magnets 31 are arranged such that their magnetic poles are opposite to the central axis of the cylinder 10. That is, different magnetic poles face each other on the inner peripheral side of the permanent magnet 31.
- the permanent magnet 31 may be formed in a ring shape and magnetized so that different magnetic poles face each other on the inner peripheral side thereof. Specifically, in the permanent magnet 31 formed in a ring shape, one half circumference part of the permanent magnet 31 is magnetized to N pole and the other half circumference part is magnetized to S pole. In this case, the support member 33 does not have a groove and has an outer peripheral shape along the inner periphery of the ring-shaped permanent magnet 31.
- the magnet unit 30 With such a configuration, the magnet unit 30 generates a magnetic field in the direction indicated by the arrow in FIG. 5A. That is, in the ring-shaped permanent magnet 31, a magnetic field from the north pole to the south pole is generated. This magnetic field acts on the magnetorheological fluid existing in the sense between the piston 21 and the cylinder 10 and increases the viscosity of the magnetorheological fluid.
- a magnetic field substantially parallel to the peripheral surface of the cylinder 10 is generated along the peripheral surface of the cylinder 10, particularly near the boundary between the north pole and the south pole of the ring-shaped permanent magnet 31. To do. Therefore, the magnetic field can be effectively applied to the magnetorheological fluid.
- the damping coefficient can be continuously changed with respect to the stroke amount of the piston 21 as in the first embodiment described above.
- the second embodiment of the present invention includes a pair of permanent magnets 31 that are C-shaped segment magnets having an inner peripheral shape along the outer peripheral shape of a cylindrical cylinder 10 in which a magnetorheological fluid is sealed.
- the magnetic poles were arranged so as to oppose each other. Thereby, since the magnetic field of the direction along the surrounding surface of the cylinder 10 generate
- the magnetic ring member 32 made of a magnetic material is disposed outside the permanent magnet 31, the magnetic field from one permanent magnet 31 toward the other permanent magnet 31 does not diverge, and the inside of the magnetic ring member 32 Therefore, the magnetic field can be applied to the magnetorheological fluid more efficiently.
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Mechanical Engineering (AREA)
- Fluid-Damping Devices (AREA)
- Vibration Prevention Devices (AREA)
Abstract
本発明は、磁界の作用によって粘性が変化する磁気粘性流体が用いられる磁気粘性流体緩衝器であって、非磁性体によって形成され、その内周に磁気粘性流体が封入される筒状のシリンダと、非磁性体によって形成され、前記シリンダの内周との間に磁気粘性流体が通過可能な間隔をもって前記シリンダ内に摺動自在に配置されるピストンと、前記ピストンが連結されるピストンロッドと、前記シリンダに取り付けられて前記シリンダ内に磁界を作用させる磁石部と、を備え、前記磁石部は、前記シリンダの外周に沿った内周形状を有する永久磁石と、磁性体によって形成され、前記永久磁石の外周側に配置されるリング部材と、を備える。
Description
本発明は、磁界の作用によって見かけの粘性が変化する磁気粘性流体を利用した磁気粘性流体緩衝器に関するものである。
自動車等の車両に搭載される緩衝器として、磁気粘性流体が通過する流路に磁界を作用させ、磁気粘性流体の見かけの粘性を変化させることによって、減衰力を変化させるものがある。
JP2007-239982Aには、磁気粘性流体が封入されたシリンダにおける軸方向の両端部に永久磁石が取り付けられた磁気粘性流体ダンパが開示されている。この磁気粘性流体ダンパは、シリンダの外周にヨーク材が設けられ、ピストンとピストンロッドの一部とが強磁性体で形成されるものである。この磁気粘性流体ダンパでは、ピストンが中立領域に位置しているときには、永久磁石の磁力は磁気粘性流体に作用しない。一方、ピストンが中立領域を越えてストロークしたときには、永久磁石からピストンロッドとピストンとヨーク材とを介して磁気回路が形成される。これにより、永久磁石の磁力がピストンとシリンダとの間の磁気粘性流体に作用し、磁気粘性流体の粘度が高くなって減衰係数が大きくなる。
しかしながら、JP2007-239982Aに記載の磁気粘性流体ダンパは、ピストンが中立領域を越えてストロークしたときに、永久磁石の磁力が磁気粘性流体に作用して減衰係数が大きく変化するものである。そのため、この磁気粘性流体ダンパは、ピストンが中立領域に位置するときと、ピストンが中立位置を越えたときとで、磁気粘性流体の粘度、すなわち減衰係数が段階的に変化する。また、磁場発生装置の周囲を磁気粘性流体が覆う構造であるため、磁場発生装置が発生する磁界が発散してしまい、磁気を効率よく磁気粘性流体に作用させることができなかった。
本発明は、上記の問題点に鑑みてなされたものであり、シリンダに磁石が取り付けられる磁気粘性流体緩衝器において、磁気を効率よく作用させて、ピストンのストローク量に対して減衰係数を連続的に変化させることを目的とする。
本発明のある態様によれば、磁界の作用によって粘性が変化する磁気粘性流体が用いられる磁気粘性流体緩衝器であって、非磁性体によって形成され、その内周に磁気粘性流体が封入される筒状のシリンダと、非磁性体によって形成され、前記シリンダの内周との間に磁気粘性流体が通過可能な間隔をもって前記シリンダ内に摺動自在に配置されるピストンと、前記ピストンが連結されるピストンロッドと、前記シリンダに取り付けられて前記シリンダ内に磁界を作用させる磁石部と、を備え、前記磁石部は、前記シリンダの外周に沿った内周形状を有する永久磁石と、磁性体によって形成され、前記永久磁石の外周側に配置されるリング部材と、を備える磁気粘性流体緩衝器が提供される。
本発明の実施形態、本発明の利点については、添付された図面を参照しながら以下に詳細に説明する。
以下、図面を参照して、本発明の実施形態について説明する。
まず、図1を参照して、本発明の第一の実施形態による磁気粘性流体緩衝器100の全体構成について説明する。図1は、磁気粘性流体緩衝器100の断面図である。
磁気粘性流体緩衝器100は、磁界の作用によって粘性が変化する磁気粘性流体を用いることによって、軸方向に加わる力に対する減衰係数が変化可能なダンパである。磁気粘性流体緩衝器100は、その減衰係数が、ピストン21のストローク量に応じて比例的に変化するように形成される。
磁気粘性流体緩衝器100は、その内周に磁気粘性流体が封入される筒状のシリンダ10と、シリンダ10の軸方向に摺動自在なようにシリンダ10内に配置されるピストン21と、ピストン21が連結されるピストンロッド22と、シリンダ10の外周に固定されてシリンダ10内に磁界を作用させる磁石部30と、を備える。
シリンダ10内に封入される磁気粘性流体は、磁界の作用によって見かけの粘性が変化するものであり、油等の液体中に強磁性を有する微粒子を分散させた液体である。磁気粘性流体の粘度は、作用する磁界の強さに応じて変化し、磁界の影響がない場合に最低となる。
シリンダ10は、その両端に開口部を有する円筒状に形成される円筒部11と、円筒部11における両端の開口部に取り付けられるヘッド部材12とボトム部材13とを備える。
円筒部11は、一方の開口部における内周に形成される螺合部11aと、他方の開口部における内周に形成される螺合部11bと、を有する。
ヘッド部材12の外周には、円筒部11の螺合部11aと螺合する螺合部12bが形成される。円筒部11の内周とヘッド部材12の外周との間には、シール部材14aが設けられ、シリンダ10内の磁気粘性流体がシールされる。ヘッド部材12には、ピストンロッド22が挿通する孔12aが形成される。
同様に、ボトム部材13の外周には、円筒部11の螺合部11bと螺合する螺合部13bが形成される。円筒部11の内周とボトム部材13の外周との間には、シール部材14bが設けられ、シリンダ10内の磁気粘性流体がシールされる。ボトム部材13には、ピストンロッド22が挿通する孔13aが形成される。
シリンダ10は、非磁性体によって形成される。これにより、シリンダ10が磁路になることが防止され、シリンダ10内に封入された磁気粘性流体に磁石部30から効率的に磁場が作用するようにできる。
シリンダ10は、円筒部11の外周にシリンダ10の他の部分と比較して薄肉に形成される環状の凹部15を有する。凹部15の周囲には、磁石部30が嵌装される。
ピストン21は、その外径がシリンダ10における円筒部11の内径よりも小径の円柱状に形成される。つまり、ピストン21は、シリンダ10における円筒部11の内周との間に磁気粘性流体が通過可能な環状の間隔をもって形成される。
ピストン21がシリンダ10内を軸方向に摺動すると、ピストン21とシリンダ10との間の間隔を磁気粘性流体が通過する。磁気粘性流体緩衝器100は、ピストン21とシリンダ10との間の環状の間隔が絞りの役割をすることによって、減衰力を発生するものである。
ピストン21は、非磁性体によって形成される。これにより、ピストン21に磁石部30の磁界が直接作用することはなく、また、ピストン21が片側に寄せられてフリクションが増加することを防止できる。
ピストンロッド22は、ピストン21と同軸になるように形成され、ピストン21の中心を挿通する。ピストンロッド22は、ピストン21と一体に形成される。ピストンロッド22をピストン21と別体に形成して、ねじ等によって接合してもよい。
ピストンロッド22の一方の端部22aは、ヘッド部材12の孔12aを挿通し、ヘッド部材12に摺動自在に支持されるとともに、シリンダ10の外部へと延在する。ピストンロッド22の他方の端部22bは、ボトム部材13の孔13aを挿通し、ボトム部材13に摺動自在に支持される。
このように、ピストンロッド22は、ヘッド部材12及びボトム部材13に摺動自在に支持されることによって、ピストン21の外周とシリンダ10の内周との間に環状の間隔があいていても、シリンダ10内にて径方向にずれることなく軸方向に摺動可能である。
次に、図2A及び図2Bを参照して、磁石部30について説明する。図2Aは、図1におけるIIA-IIA断面図である。図2Bは、本発明の第一の実施形態による磁気粘性流体緩衝器100の永久磁石31について説明する図である。
磁石部30は、図2Aに示すように、その断面が円環状に形成されている。磁石部30は、シリンダ10の凹部15の周囲に嵌装される。凹部15は、シリンダ10の他の部分と比較して薄肉に形成される。そのため、磁石部30の磁界がシリンダ10内に封入された磁気粘性流体に作用することを妨げない。
磁石部30は、一対の永久磁石31と、永久磁石31を支持する支持部材33と、永久磁石31と支持部材33との周囲に嵌装される円環状の磁性リング部材32と、から構成される。
永久磁石31は、シリンダ10の軸の中心と同一の軸を中心とする第一の円周の一部の弧からなる内周面31aと、第一の円周と同一の中心を有して第一の円周と比較して径が大きな第二の円周の一部の弧からなる外周面31bと、内周面31aと外周面31bとを結ぶ一対の側面31cと、によって囲まれた円弧状の形状を有するC型のセグメント磁石である。一対の永久磁石31は、同一の形状に形成され、シリンダ10の中心軸に対して対称に配置される。
永久磁石31は、図2Bに示すように、径方向に一組の磁極が着磁されている。図2Bに示す例では、永久磁石31は、それぞれ、内周面31a側がN極となり、外周面31b側がS極となるように着磁されている。磁石部30において、一対の永久磁石31は、それぞれの磁極がシリンダ10の中心軸に対して向かい合わせに配置される。すなわち、一対の永久磁石31は、互いに同方向に着磁され、シリンダ10の中心軸を通過する線分に対して線対称に配置される。
支持部材33の内周側は、環状に形成された凹部15の周囲に沿うような円筒形状に形成される。支持部材33の外周側には、円周上の外形に永久磁石31を固定するための溝部33aと溝部33bとが形成される。支持部材33は、溝部33aと溝部33bとに永久磁石31がそれぞれ固定された状態で、その外周が、前述した第二の円周と同一の円を形成する。
支持部材33は、シリンダ10と同様に、非磁性体によって形成される。これにより、支持部材33が磁路になることが防止され、磁石部30からの磁界が磁気粘性流体に効率的に作用する。
支持部材33の外周には、磁性体によって構成される円環状の磁性リング部材32が嵌装される。磁性リング部材32は、溝部33aと溝部33bとに永久磁石31がそれぞれ固定された状態の支持部材33の外周に密着して嵌装される。
磁性リング部材32は、永久磁石31が発生する磁界の磁路を構成する。磁性リング部材32は、透磁率が大きく、残留磁場の保磁力が小さい軟磁性体によって形成される。
一対の永久磁石31は、支持部材33によって互いに分離して固定される。すなわち、永久磁石31は、内周面31a及び外周面31bの中心角が180°未満に設定される。また、永久磁石31の外周面31bは、磁性リング部材32の内周面に密接している。
このような構成により、磁石部30は、図2Aに矢印で示す方向に磁界を発生する。すなわち、一対の永久磁石31の磁極が向かい合わせになるように配設されることによって、シリンダ10の中心軸から放射方向の磁力が発生する。この磁力は、ピストン21とシリンダ10との間の間隔に存在する磁気粘性流体に満遍なく作用し、磁気粘性流体の粘度を上昇させることができる。
また、永久磁石31の外側には磁性体の磁性リング部材32が配置されているので、外周面31b側に向かう磁界は、発散することなく磁性リング部材32の内部を通過する。これにより、磁界をより効率的に磁気粘性流体に作用させることができる。
磁石部30は、ピストンロッド22がシリンダ10内に最も進入したときのピストン21の位置に対応して配設される。そのため、シリンダ10内の磁気粘性流体の粘度は、軸方向の位置によって相違する。具体的には、シリンダ10内の磁気粘性流体は、磁石部30に近付くほど磁界の影響が大きくなり強磁性を有する微粒子が集まることによって粘度が高くなる。一方、シリンダ10内の磁気粘性流体は、磁石部30から離れるほど磁界の影響が小さくなって粘度が低くなる。
そのため、ピストンロッド22がシリンダ10内に進入する方向にストロークすると、ピストン21とシリンダ10との間の間隔を通過する磁気粘性流体への磁石部30による磁界の影響が徐々に大きくなる。よって、シリンダ10内に進入する方向へのピストンロッド22のストロークに応じて、磁気粘性流体の見かけの粘度が高くなる。したがって、磁気粘性流体緩衝器100の減衰係数は、ピストンロッド22がシリンダ10内に進入するほど大きくなることとなり、ピストン21のストローク量に対して減衰係数を連続的に変化させることができる。
次に、図3を参照して、磁気粘性流体緩衝器100の作用について説明する。
図3において、横軸は、シリンダ10に対するピストンロッド22の進入量であるストローク量S[m]であり、縦軸は、磁気粘性流体緩衝器100の減衰係数C[N・s/m]である。図3において、直線Xは、磁気粘性流体緩衝器100の減衰係数Cを示すものであり、直線Yは、磁気粘性流体緩衝器100に磁石部30を設けずに、シリンダ10内の磁気粘性流体に磁界が作用しない場合の減衰係数Cを示すものである。
磁石部30が設けられない場合には、シリンダ10に対してピストンロッド22が進入していっても、絞りの役割をするピストン21とシリンダ10との間の環状の間隔は、常に一定である。また、磁石部30が設けられないため、シリンダ10内の磁気粘性流体に磁界が影響せず、シリンダ10内における磁気粘性流体の粘度はピストンロッド22のストローク量にかかわらず一定である。よって、この場合の減衰係数Cは、直線Yのようにストローク量Sの変化に対して常に一定の値である。
これに対して、磁気粘性流体緩衝器100では、直線Xのように、シリンダ10からピストンロッド22が最も退出したストローク量がSminの状態では、減衰係数Cは最小である。ただし、このストローク量がSminの状態においても、シリンダ10内の磁気粘性流体には磁石部30による磁界が影響して強磁性を有する微粒子が整列しているため、磁石部30が設けられない場合と比較すると減衰係数Cは大きくなっている。
ストローク量がSminの状態からピストンロッド22がシリンダ10内に進入してゆくと、減衰係数Cは比例的に大きくなり、ストローク量がSmaxのときに減衰係数Cが最大となる。これは、ピストン21とシリンダ10との間の環状の間隔における磁気粘性流体の粘度が徐々に大きくなるためである。また、ピストン21が、磁界の影響が大きい磁石部30の内周側に進入し、ピストン21とシリンダ10との間の環状の間隔のうち、磁界の影響を直接的に受ける長さが徐々に大きくなるためである。
このように、ピストンロッド22がシリンダ10内に最も進入したときのピストン21の位置に相当する位置に磁石部30を配設することによって、ピストンロッド22がシリンダ10内に進入する方向のストローク量に対して、磁気粘性流体緩衝器100の減衰係数Cを比例的に大きくすることができる。
以上の第一の実施形態によれば、以下に示す効果を奏する。
シリンダ10とピストン21とは非磁性体によって形成され、シリンダ10にはシリンダ10内の磁気粘性流体に磁界を作用させる磁石部30が取り付けられる。よって、シリンダ10やピストン21が磁路を形成することはなく、シリンダ10とピストン21との間の間隔を通過する磁気粘性流体への磁界の影響は、ピストン21がストロークして磁石部30に近付くにつれて徐々に大きくなることとなる。したがって、ピストン21のストローク量に対して減衰係数を連続的に変化させることができる。
また、磁石部30は、磁気粘性流体が封入される円筒形のシリンダ10の外周形状に沿う内周形状を有するC型のセグメント磁石である一対の永久磁石31を備える。これにより、磁界がピストン21とシリンダ10との間の間隔に存在する磁気粘性流体に作用し、磁気粘性流体の粘度を上昇させる。
また、永久磁石31の外側には磁性体の磁性リング部材32が配置されているので、外周面31b側に向かう磁界は、発散することなく磁性リング部材32を通過する。これにより、磁界を効率的に磁気粘性流体に作用させることができる。
次に、図4Aから図5Bを参照して、本発明の第二の実施形態について説明する。なお、第二の実施形態では、前述した第一の実施形態と同様の構成には同一の符号を付し、重複する説明は適宜省略する。図4Aは、本発明の第二の実施形態による磁気粘性流体緩衝器のシリンダ10及び磁石部30の断面図であり、図4Bは、本発明の第二の実施形態による磁気粘性流体緩衝器の永久磁石31について説明する図である。また、図5Aは、本発明の第二の実施形態による磁気粘性流体緩衝器の変形例のシリンダ10及び磁石部30の断面図であり、図5Bは、本発明の第二の実施形態による磁気粘性流体緩衝器100の変形例の永久磁石31について説明する図である。
第二の実施形態による磁気粘性流体緩衝器は、図1に示される第一の実施形態による磁気粘性流体緩衝器100と全体の基本構成は同一である。第二の実施形態による磁気粘性流体緩衝器は、第一の実施形態による磁気粘性流体緩衝器100とは、磁石部30の構成のみが相違する。
磁石部30は、図2に示される第一の実施形態と同様に、一対の永久磁石31と、永久磁石31を支持する支持部材33と、永久磁石31と支持部材33との周囲に嵌装される円環状の磁性リング部材32と、から構成される。
永久磁石31は、C型のセグメント磁石である。一対の永久磁石31は、同一の形状に形成され、シリンダ10の中心軸に対して対称に配置される。
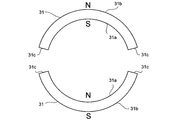
第二の実施形態においては、永久磁石31は、図4Bに示すように、径方向に一組の磁極が着磁されている。図4Bに示す例では、一方の永久磁石31は、内周面31a側がN極となり、外周面31b側がS極となるように着磁されている。他方の永久磁石31は、内周面31a側がS極となり、外周面31b側がN極となるように着磁されている。磁石部30において、一対の永久磁石31は、それぞれの磁極がシリンダ10の中心軸に対して相反するように配置される。すなわち、一対の永久磁石31の磁極は、互いに相違する。
このような構成により、磁石部30は、図4Aに矢印で示す方向に磁界を発生する。すなわち、一対の永久磁石31の磁極が相反するように配設されることによって、一方の永久磁石31から他方の永久磁石31に向かう磁力が発生する。この磁力は、ピストン21とシリンダ10との間の間隔に存在する磁気粘性流体に作用し、磁気粘性流体の粘度を上昇させる。
シリンダ10では、特に一対の永久磁石31の境目付近で、シリンダ10の周面に沿ってシリンダ10の周面に沿う方向の磁界が発生する。よって、磁界を磁気粘性流体に有効に作用させることができる。
また、永久磁石31の外側には磁性体の磁性リング部材32が配置されているので、一方の永久磁石31から他方の永久磁石31に向かう磁界は、発散することなく磁性リング部材32を通過する。これにより、磁界を効率的に磁気粘性流体に作用させることができる。
図4Bに示されるように、磁石部30において、一対の永久磁石31は、それぞれの磁極がシリンダ10の中心軸に対して相反するように配設される。すなわち、永久磁石31の内周側にて、異なる磁極どうしが対峙している。
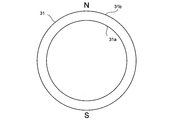
これと同様の磁界を形成するために、図5Bに示すように、永久磁石31をリング状に形成し、その内周側に異なる磁極どうしが対峙するように着磁させてもよい。具体的には、リング状に形成した永久磁石31において、永久磁石31の一方の半周部分をN極に、他の半周部分をS極に着磁させる。この場合、支持部材33は溝部を有せず、リング状の永久磁石31の内周に沿う外周形状を有する。
このような構成により、磁石部30は、図5Aに矢印で示す方向に磁界を発生する。すなわち、リング状の永久磁石31において、N極からS極に向かう磁界が発生する。この磁界は、ピストン21とシリンダ10との間の感覚に存在する磁気粘性流体に作用し、磁気粘性流体の粘度を上昇させる。
この場合にも同様に、シリンダ10では、特にリング状の永久磁石31のN極とS極との境目付近で、シリンダ10の周面に沿ってシリンダ10の周面と略平行な磁界が発生する。よって、磁界を磁気粘性流体に有効に作用させることができる。
以上のように、本発明の第二の実施形態では、前述した第一の実施形態と同様に、ピストン21のストローク量に対して減衰係数を連続的に変化させることができる。
また、本発明の第二の実施形態では、磁気粘性流体が封入される円筒形のシリンダ10の外周形状に沿う内周形状を有するC型のセグメント磁石である一対の永久磁石31を備え、これらの磁極が互いに相反するように配設した。これにより、シリンダ10の周面に沿う方向の磁界が発生するので、磁界を磁気粘性流体に有効に作用させることができる。
また、永久磁石31の外側には磁性体の磁性リング部材32が配置されているので、一方の永久磁石31から他方の永久磁石31に向かった磁界は、発散することなく磁性リング部材32の内部を通過するので、磁界をより効率的に磁気粘性流体に作用させることができる。
以上、本発明の実施形態について説明したが、上記実施形態は本発明の適用例の一部を示したに過ぎず、本発明の技術的範囲を上記実施形態の具体的構成に限定する趣旨ではない。
本願は、2011年6月13日に日本国特許庁に出願された特願2011-131257に基づく優先権を主張し、この出願の全ての内容は参照により本明細書に組み込まれる。
この発明の実施例が包含する排他的性質又は特徴は、以下のようにクレームされる。
Claims (6)
- 磁界の作用によって粘性が変化する磁気粘性流体が用いられる磁気粘性流体緩衝器であって、
非磁性体によって形成され、その内周に磁気粘性流体が封入される筒状のシリンダと、
非磁性体によって形成され、前記シリンダの内周との間に磁気粘性流体が通過可能な間隔をもって前記シリンダ内に摺動自在に配置されるピストンと、
前記ピストンが連結されるピストンロッドと、
前記シリンダに取り付けられて前記シリンダ内に磁界を作用させる磁石部と、を備え、
前記磁石部は、
前記シリンダの外周に沿った内周形状を有する永久磁石と、
磁性体によって形成され、前記永久磁石の外周側に配置されるリング部材と、を備える磁気粘性流体緩衝器。 - 請求項1に記載の磁気粘性流体緩衝器であって、
前記磁石部は、前記ピストンロッドが前記シリンダ内に最も進入したときの前記ピストンの位置に対応して配設される磁気粘性流体緩衝器。 - 請求項1に記載の磁気粘性流体緩衝器であって、
前記永久磁石は、前記シリンダの外周に沿った内周形状を有する円弧状に形成され、前記シリンダの中心軸を挟んで対向するように一対設けられる磁気粘性流体緩衝器。 - 請求項3に記載の磁気粘性流体緩衝器であって、
一対の前記永久磁石は、径方向に着磁されており、それぞれの磁極が前記シリンダの中心軸に対して互いに対称となるように配置されている磁気粘性流体緩衝器。 - 請求項3に記載の磁気粘性流体緩衝器であって、
一対の前記永久磁石は、径方向に着磁されており、それぞれの磁極が前記シリンダの中心軸に対して互いに相反するように配置されている磁気粘性流体緩衝器。 - 請求項1に記載の磁気粘性流体緩衝器であって、
前記永久磁石は、前記シリンダの外周に沿った内周形状を有するリング状に形成され、その磁極が前記シリンダの中心軸に対して互いに相反するように配置されている磁気粘性流体緩衝器。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201280024748.4A CN103562591B (zh) | 2011-06-13 | 2012-05-29 | 磁粘性流体缓冲器 |
| KR1020137033319A KR20140012172A (ko) | 2011-06-13 | 2012-05-29 | 자기 점성 유체 완충기 |
| US14/125,921 US20140116827A1 (en) | 2011-06-13 | 2012-05-29 | Magnetorheological fluid shock absorber |
| EP12801131.9A EP2719918A4 (en) | 2011-06-13 | 2012-05-29 | MAGNETIC VISCOUS SHOCK |
| KR1020157035265A KR101748980B1 (ko) | 2011-06-13 | 2012-05-29 | 자기 점성 유체 완충기 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011131257A JP5821095B2 (ja) | 2011-06-13 | 2011-06-13 | 磁気粘性流体緩衝器 |
| JP2011-131257 | 2011-06-13 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2012172961A1 true WO2012172961A1 (ja) | 2012-12-20 |
Family
ID=47356954
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2012/063708 WO2012172961A1 (ja) | 2011-06-13 | 2012-05-29 | 磁気粘性流体緩衝器 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20140116827A1 (ja) |
| EP (1) | EP2719918A4 (ja) |
| JP (1) | JP5821095B2 (ja) |
| KR (2) | KR101748980B1 (ja) |
| CN (1) | CN103562591B (ja) |
| WO (1) | WO2012172961A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104141730B (zh) * | 2014-06-30 | 2016-08-24 | 北京交通大学 | 一种磁固式磁性液体阻尼减振器 |
| KR102481566B1 (ko) * | 2020-12-28 | 2022-12-26 | 한국해양과학기술원 | 엠알(mr) 유체 댐퍼 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60121948A (ja) * | 1983-12-01 | 1985-06-29 | Nippon Denso Co Ltd | 電気回転機械の磁石回転子の永久磁石固定方式 |
| JPH0552235A (ja) * | 1991-08-23 | 1993-03-02 | Toshiba Corp | 粘性ダンパ |
| JPH0541357U (ja) * | 1991-11-05 | 1993-06-01 | 株式会社荻原製作所 | 永久磁石回転子および電動機 |
| JP2005291338A (ja) * | 2004-03-31 | 2005-10-20 | Hitachi Ltd | ダンパ |
| JP2005333762A (ja) * | 2004-05-21 | 2005-12-02 | Mitsubishi Electric Corp | 回転電機の回転子および回転電機 |
| JP2007239982A (ja) | 2006-02-09 | 2007-09-20 | Central Res Inst Of Electric Power Ind | 磁気粘性流体ダンパ |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5610844A (en) * | 1979-07-02 | 1981-02-03 | Toyota Motor Corp | Feedback control system vibration absorbing suspension |
| JPS57161330A (en) * | 1981-03-27 | 1982-10-04 | Matsushita Electric Works Ltd | Oil dashpot |
| US5105114A (en) * | 1991-05-20 | 1992-04-14 | General Motors Corporation | Frame and magnet assembly for a dynamoelectric machine |
| US5947238A (en) * | 1997-03-05 | 1999-09-07 | Lord Corporation | Passive magnetorheological fluid device with excursion dependent characteristic |
| US6471018B1 (en) * | 1998-11-20 | 2002-10-29 | Board Of Regents Of The University And Community College System On Behalf Of The University Of Nevada-Reno, The University Of Reno | Magneto-rheological fluid device |
| US6279700B1 (en) * | 1999-09-13 | 2001-08-28 | Delphi Technologies, Inc. | Magnetorheological fluid damper |
| JP2003090398A (ja) * | 2001-09-18 | 2003-03-28 | Bando Chem Ind Ltd | オートテンショナー |
| US7422092B2 (en) * | 2003-07-07 | 2008-09-09 | Gregory Hitchcock | Controllable compressible fluid damper |
| CN100356082C (zh) * | 2004-07-09 | 2007-12-19 | 北京工业大学 | 逆变型磁流变阻尼器 |
| JP4682086B2 (ja) * | 2006-05-15 | 2011-05-11 | 株式会社コガネイ | Mr流体バルブ |
| US20090277733A1 (en) * | 2007-05-19 | 2009-11-12 | Stabilus Gmbh | Kolben-Zylinderaggregat |
| US8651250B2 (en) * | 2008-10-15 | 2014-02-18 | Thomas Wolfgang Nehl | Magnetorheological devices with permanent magnet field bias |
| DE102009034298A1 (de) * | 2009-07-21 | 2011-01-27 | Dt Swiss Ag | Dämpfereinrichtung für ein Zweirad |
| US8327984B2 (en) * | 2009-10-30 | 2012-12-11 | Bwi Company Limited S.A. | Magnetorheological (MR) piston assembly with primary and secondary channels to improve MR damper force |
| DE102009060525B4 (de) * | 2009-12-23 | 2012-05-03 | Inventus Engineering Gmbh | Ventil für eine magnetorheologische Flüssigkeit |
| CN101915283B (zh) * | 2010-08-06 | 2011-12-07 | 浙江大学 | 一种磁流变复合阻尼控制方法与装置 |
| TWI391578B (zh) * | 2011-02-22 | 2013-04-01 | Univ Nat Taipei Technology | 磁流變液煞車器 |
| JP5789422B2 (ja) * | 2011-06-13 | 2015-10-07 | カヤバ工業株式会社 | 磁気粘性流体緩衝器 |
| JP5743785B2 (ja) * | 2011-07-28 | 2015-07-01 | 日立オートモティブシステムズ株式会社 | 電磁サスペンション |
-
2011
- 2011-06-13 JP JP2011131257A patent/JP5821095B2/ja not_active Expired - Fee Related
-
2012
- 2012-05-29 CN CN201280024748.4A patent/CN103562591B/zh not_active Expired - Fee Related
- 2012-05-29 KR KR1020157035265A patent/KR101748980B1/ko active IP Right Grant
- 2012-05-29 WO PCT/JP2012/063708 patent/WO2012172961A1/ja active Application Filing
- 2012-05-29 KR KR1020137033319A patent/KR20140012172A/ko active Application Filing
- 2012-05-29 US US14/125,921 patent/US20140116827A1/en not_active Abandoned
- 2012-05-29 EP EP12801131.9A patent/EP2719918A4/en not_active Withdrawn
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60121948A (ja) * | 1983-12-01 | 1985-06-29 | Nippon Denso Co Ltd | 電気回転機械の磁石回転子の永久磁石固定方式 |
| JPH0552235A (ja) * | 1991-08-23 | 1993-03-02 | Toshiba Corp | 粘性ダンパ |
| JPH0541357U (ja) * | 1991-11-05 | 1993-06-01 | 株式会社荻原製作所 | 永久磁石回転子および電動機 |
| JP2005291338A (ja) * | 2004-03-31 | 2005-10-20 | Hitachi Ltd | ダンパ |
| JP2005333762A (ja) * | 2004-05-21 | 2005-12-02 | Mitsubishi Electric Corp | 回転電機の回転子および回転電機 |
| JP2007239982A (ja) | 2006-02-09 | 2007-09-20 | Central Res Inst Of Electric Power Ind | 磁気粘性流体ダンパ |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2719918A4 * |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5821095B2 (ja) | 2015-11-24 |
| CN103562591B (zh) | 2016-06-15 |
| US20140116827A1 (en) | 2014-05-01 |
| KR101748980B1 (ko) | 2017-06-19 |
| JP2013002470A (ja) | 2013-01-07 |
| KR20140012172A (ko) | 2014-01-29 |
| EP2719918A1 (en) | 2014-04-16 |
| KR20160003872A (ko) | 2016-01-11 |
| CN103562591A (zh) | 2014-02-05 |
| EP2719918A4 (en) | 2016-03-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9004243B2 (en) | Magneto-rheological damping assembly | |
| WO2012172963A1 (ja) | 磁気粘性流体緩衝器 | |
| KR101591221B1 (ko) | 자기 점성 유체 완충기 | |
| JP6778239B2 (ja) | マウントブッシュ | |
| KR101679244B1 (ko) | 영구 자석을 이용한 mr 유체 댐퍼 | |
| KR20180049041A (ko) | 자기 점성 유체 완충기 | |
| US6866127B2 (en) | Piston damper assembly, and dust tube subassembly, having a velocity sensor | |
| KR101671009B1 (ko) | 와전류 감쇠 특성을 이용한 철도차량용 댐퍼 및 축상스프링 | |
| WO2012172961A1 (ja) | 磁気粘性流体緩衝器 | |
| JP4728862B2 (ja) | 磁気粘性流体ダンパ | |
| JP2016023721A (ja) | ダンパ装置 | |
| JP5539243B2 (ja) | 磁気粘性流体緩衝器 | |
| JP5679864B2 (ja) | 磁気粘性流体緩衝器 | |
| KR101984633B1 (ko) | Mr 댐퍼 | |
| JP2015152077A (ja) | 圧力緩衝装置 | |
| JP6295465B2 (ja) | 磁気粘性流体ダンパー | |
| JP2007303581A (ja) | 磁気粘性流体緩衝器 | |
| JP5840972B2 (ja) | 磁気粘性流体緩衝器 | |
| CA2984533C (en) | Smart fluid damper | |
| KR20210087821A (ko) | 영구자석 기반의 mr 댐퍼 | |
| RU2506476C1 (ru) | Поршневой магнитожидкостный амортизатор | |
| JP2004301332A (ja) | 液体封入式振動吸収装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 12801131 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 14125921 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 20137033319 Country of ref document: KR Kind code of ref document: A |