WO2009113144A1 - 対象物追跡装置および対象物追跡方法 - Google Patents
対象物追跡装置および対象物追跡方法 Download PDFInfo
- Publication number
- WO2009113144A1 WO2009113144A1 PCT/JP2008/004015 JP2008004015W WO2009113144A1 WO 2009113144 A1 WO2009113144 A1 WO 2009113144A1 JP 2008004015 W JP2008004015 W JP 2008004015W WO 2009113144 A1 WO2009113144 A1 WO 2009113144A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- image
- contour
- search
- processing
- edge
- Prior art date
Links
Images













Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/277—Analysis of motion involving stochastic approaches, e.g. using Kalman filters
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/246—Analysis of motion using feature-based methods, e.g. the tracking of corners or segments
- G06T7/251—Analysis of motion using feature-based methods, e.g. the tracking of corners or segments involving models
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10016—Video; Image sequence
Abstract
図7において、1つ前のフレームにおける追跡対象の存在確率分布に基づき、パーティクルフィルタを用いて現在のフレームにおける追跡対象の輪郭の候補曲線を定める。候補曲線と現在のフレームの輪郭画像90とをマッチングするために、候補曲線を構成するノット92ごとに、候補曲線の最近傍にある輪郭線を探索する処理を分割し、複数の処理部によって並列に実行する。各処理部のローカルメモリ60a~60dには、画像記憶部24に格納した輪郭画像90から、処理対象のノット92の探索領域94の画像データをコピーする。
Description
本発明は情報処理技術に関し、特に入力画像中の対象物の追跡を行う対象物追跡装置およびそこで実行される対象物追跡方法に関する。
視覚追跡はコンピュータビジョン、特にセキュリティ分野における視覚監視やAV分野における記録映像の解析・分類、編集、またはマンマシンインターフェース、さらには人間同士のインターフェース、すなわちテレビ会議やテレビ電話など、多岐に渡る応用が見込まれる。そのため、追跡精度および処理効率の向上等を目的に、多くの研究がなされている。中でも、カルマンフィルタで扱うことのできない非ガウス性雑音が加算された信号の時系列解析手法として注目されているパーティクルフィルタを視覚追跡に応用する研究が多くなされており、特にCondensation(Conditional Density Propagation)アルゴリズムが有名である(例えば非特許文献1から非特許文献3参照)。
パーティクルフィルタはベイズフィルタの近似計算法であり、有限個のパーティクルを追跡候補として導入することにより対象の確率分布を表現し、それを用いて時系列推定や予測を行う。Condensationアルゴリズムはパーティクルフィルタを用いて、追跡対象の形状についての確率分布の時間変化を推定する。具体的には、追跡対象と同一形状を有する候補の輪郭線を1つのパーティクルで表し、運動モデルによるパラメータ遷移と観測による遷移結果の尤度計算によって、対象のパラメータ空間上での存在確率分布を逐次推定する。
Contour tracking by stochastic propagation of conditional density, Michael Isard and Andrew Blake, Proc. European Conf. on Computer Vision, vol. 1, pp.343-356, Cambridge UK (1996) CONDENSATION - conditional density propagation for visual tracking, Michael Isard and Andrew Blake, Int. J. Computer Vision, 29, 1, 5-28 (1998) ICondensation: Unifying low-level and high-level tracking in a stochastic framework, Michael Isard and Andrew Blake, Proc 5th European Conf. Computer Vision, 1998
Contour tracking by stochastic propagation of conditional density, Michael Isard and Andrew Blake, Proc. European Conf. on Computer Vision, vol. 1, pp.343-356, Cambridge UK (1996) CONDENSATION - conditional density propagation for visual tracking, Michael Isard and Andrew Blake, Int. J. Computer Vision, 29, 1, 5-28 (1998) ICondensation: Unifying low-level and high-level tracking in a stochastic framework, Michael Isard and Andrew Blake, Proc 5th European Conf. Computer Vision, 1998
パーティクルフィルタを利用して視覚追跡を行う場合、当然、早い処理速度で結果が出力されることが望ましい。このことは、撮影中の映像における対象物をリアルタイムで追跡する場合は特に重要である。この場合、1フレームごとに必要な処理、すなわちパーティクルの生成消滅、各パーティクルが定める候補の輪郭線とそのフレームのエッジ画像とのマッチング、尤度取得、存在確率分布の推定、といった処理をフレームの入力周期以内に終了させる必要がある。しかし、追跡対象の数や大きさが変化すると、処理時間や処理に必要なリソースが変動してしまうため、それらのパラメータの見積もりが難しく、常に最適な環境で高速に追跡処理を行うことは困難であった。
本発明はこのような課題に鑑みてなされたものであり、追跡処理の効率性が追跡対象の変化の影響を受けにくく、スケーラビリティの高い視覚追跡技術を提供することにある。
本発明のある態様は対象物追跡装置に関する。この対象物追跡装置は、追跡したい対象物を撮影した動画像データを構成する画像ストリームに含まれる第1の画像フレームおよび第2の画像フレームのうち、第1の画像フレームにおける対象物の推定存在確率分布に基づき、第2の画像フレームにおける対象物の候補輪郭を定める候補輪郭決定部と、候補輪郭決定部が定めた候補輪郭と、第2の画像フレームのエッジ画像とをマッチングして、候補輪郭の尤度を観測する観測部と、観測部が観測した尤度に基づき、第2の画像フレームにおける対象物の存在確率分布を推定する結果取得部と、を備え、観測部は、候補輪郭の曲線を構成するノットから最近傍にあるエッジを探索する処理を、当該ノットごとに並列に実行する複数の探索部と、探索部が探索した結果を統合して候補輪郭ごとに尤度を求める尤度取得部と、を備えたことを特徴とする。
ここで「第1の画像フレーム」と「第2の画像フレーム」は、画像ストリームにおいて隣接する画像フレームでもよいし、離れて位置する画像フレームでもよい。時間軸の順方向へ追跡していく一般的な対象物追跡においては、「第1の画像フレーム」は「第2の画像フレーム」より時間的に前の画像フレームであるが、本実施の形態はこれに限らない。
「存在確率分布」は、対象物の画像フレーム内の位置座標に対する存在確率分布であってもよいし、形状、色、大きさなど対象物の有する属性のいずれかまたはそれらの組み合わせを表すパラメータが張る空間に対する存在確率分布であってもよい。「候補輪郭」は対象物の一部または全体の輪郭線の候補を表す図形である。また「尤度」は候補輪郭がどの程度対象物と近い態様となっているかを表す度合いであり、例えば対象物との重なり具合、対象物との距離などを数値で示したものなどである。
本発明の別の態様は対象物追跡方法に関する。この対象物追跡方法は、追跡したい対象物を撮影した動画像データを構成する画像ストリームに含まれる第1の画像フレームおよび第2の画像フレームのうち、第1の画像フレームにおける対象物の推定存在確率分布に基づき、第2の画像フレームにおける対象物の候補輪郭を定めるステップと、第2の画像フレームのエッジ画像を生成してメモリに格納するステップと、メモリに格納したエッジ画像の一部の領域の画像データを読み出し、探索することにより、候補輪郭の曲線を構成するノットから最近傍にあるエッジを検出する処理を、ノットごとに並列に実行するステップと、エッジ検出の結果を統合して候補輪郭ごとに尤度を求め、第2の画像フレームにおける対象物の存在確率分布を推定するステップと、を含むことを特徴とする。
なお、以上の構成要素の任意の組合せ、本発明の表現を方法、装置、システム、コンピュータプログラム、コンピュータプログラムを記録した記録媒体などの間で変換したものもまた、本発明の態様として有効である。
本発明によれば、高速でスケーラビリティの高い視覚追跡技術を実現することができる。
10 視覚追跡システム、 12 撮像装置、 14 追跡装置、 16 表示装置、 20 画像取得部、 22 輪郭画像生成部、 24 画像記憶部、 26 追跡処理部、 28 追跡開始終了判定部、 29 サンプリング部、 30 観測部、 34 結果取得部、 36 結果記憶部、 40 出力制御部、 50 輪郭画像切り出し部、 52 輪郭探索タスクキュー、 54 尤度取得部、 56 輪郭探索部、 58a 第1処理部、 60a ローカルメモリ、 62 平滑化フィルタ、 64 低階調化部、 66 エッジ抽出フィルタ。
実施の形態1
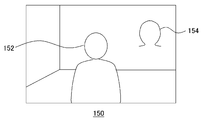
初めに、本実施の形態の特徴および効果を明らかにするために、パーティクルフィルタによる視覚追跡について概説する。図1は人物を追跡対象とした場合の視覚追跡手法を説明するための図である。人物画像150は実写した動画像やコンピュータグラフィックスなどにより生成された動画像の画像ストリームを構成する画像フレームのひとつであり、追跡対象である人物152が写っている。
初めに、本実施の形態の特徴および効果を明らかにするために、パーティクルフィルタによる視覚追跡について概説する。図1は人物を追跡対象とした場合の視覚追跡手法を説明するための図である。人物画像150は実写した動画像やコンピュータグラフィックスなどにより生成された動画像の画像ストリームを構成する画像フレームのひとつであり、追跡対象である人物152が写っている。
この人物152の動きを追跡するために、人物152の頭部輪郭の形状を近似するΩ形の曲線154を既知の表現で記述する。一方、人物152を含む人物画像150にはエッジ抽出処理を施し、エッジ画像を取得しておく。そして曲線154を規定するパラメータを変化させながら形状および位置を変化させて、その近傍にあるエッジを探索することにより、人物152の頭部輪郭と最もマッチすると推定されるパラメータの値を特定する。以上の処理をフレームごとに繰り返すことにより人物152の追跡が進捗する。ここでエッジとは一般的には画像の濃度や色に急な変化を有する箇所のことである。
様々な曲線154と人物152の頭部輪郭とのマッチングを行うために、パーティクルフィルタによる確率分布予測技術を導入する。すなわち、ひとつ前のフレームにおけるパラメータ空間上の対象物の確率分布に応じて曲線154のサンプリング数を増減させ、追跡候補の絞り込みを行う。これにより存在確率の高い部分に対しては重点的に探索を行うことができ、精度のよいマッチングが効率的に行える。
対象物の輪郭に着目した追跡に対するパーティクルフィルタの適用手法は、例えば非特許文献3(ICondensation: Unifying low-level and high-level tracking in a stochastic framework, Michael Isard and Andrew Blake, Proc 5th European Conf. Computer Vision, 1998)に詳述されている。ここでは本実施の形態に係る点に着目して説明する。
まずΩ形の曲線154を、Bスプライン曲線で記述する。Bスプライン曲線はn個の制御点列(Q0,・・・,Qn)とノット列(s0,・・・,sn)とから定義される。そして基本となる曲線形状、この場合はΩ形の曲線となるように、それらのパラメータをあらかじめ設定しておく。このときの設定によって得られる曲線を以後、テンプレートQ0と呼ぶ。なお、図1で示した人物画像150における人物152の追跡を行う場合は、テンプレートQ0はΩ形であるが、その形状は追跡対象によって変化させる。すなわち追跡対象がボールであれば円形、手のひらであれば手の形状などとなる。
次にテンプレートの形状を変化させるための変換パラメータとして、形状空間ベクトルxを準備する。形状空間ベクトルxは以下のような6つのパラメータで構成される。

ここで(shiftx,shifty)は(x,y)方向への並進量、(extendx,extendy)は倍率、θは回転角である。そして形状空間ベクトルxをテンプレートQ0に作用させるための作用行列Wを用いると、変形後の曲線、すなわち候補曲線Qは以下のように記述できる。
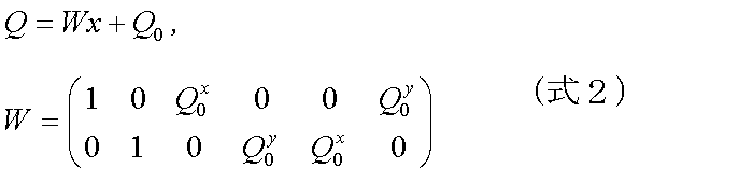
式2を用いれば、形状空間ベクトルxを構成する6つのパラメータを適宜変化させることにより、テンプレートを並進、伸縮、回転させることができ、組み合わせによって候補曲線Qの形状や位置を種々変化させることができる。
そして、制御点列、およびノット列の間隔といったテンプレートQ0のパラメータや、形状空間ベクトルxを構成する6つのパラメータを変化させることによって表現される複数の候補曲線について、各ノットの近傍にある人物152のエッジを探索する。その後、エッジとの距離などから各候補曲線の尤度を求めることにより、形状空間ベクトルxを構成する6つのパラメータが張る6次元空間における確率密度分布を推定する。
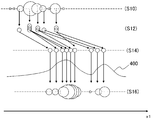
図2はパーティクルフィルタを用いた確率密度分布推定の手法を説明する図である。同図では理解を簡単にするために、形状空間ベクトルxを構成する6つのパラメータのうち、あるパラメータx1の変化を横軸に表しているが、実際には6次元空間において同様の処理が行われる。ここで確率密度分布を推定したい画像フレームが時刻tの画像フレームであるとする。
まず、時刻tの画像フレームのひとつ前のフレームである時刻t-1の画像フレームにおいて推定された、パラメータx1軸上の確率密度分布を用いて(S10)、時刻tにおけるパーティクルを生成する(S12)。それまでにフィルタリングを行い、すでにパーティクルが存在する場合は、その分裂、および消滅を決定する。S10において表した確率密度分布は、パラメータ空間上の座標に対応して離散的に求められたものであり、円が大きいほど確率密度が高いことを表している。
パーティクルはサンプリングするパラメータx1の値とサンプリング密度とを実体化したものであり、例えば時刻t-1において確率密度が高かったパラメータx1の領域は、パーティクル密度を高くすることで重点的にサンプリングを行い、確率密度の低かった範囲はパーティクルを少なくすることでサンプリングをあまり行わない。これにより、例えば人物152のエッジ近傍において候補曲線を多く発生させて、効率よくマッチングを行う。
次に所定の運動モデルを用いて、パーティクルをパラメータ空間上で遷移させる(S14)。所定の運動モデルとは例えば、ガウシアン型運動モデル、自己回帰予測型運動モデルなどである。前者は、時刻tにおける確率密度は時刻t-1における各確率密度の周囲にガウス分布している、とするモデルである。後者は、サンプルデータから取得した2次以上の自己回帰予測モデルを仮定する手法で、例えば人物152がある速度で等速運動をしているといったことを過去のパラメータの変化から推定する。図2の例では、自己回帰予測型運動モデルによりパラメータx1の正方向への動きが推定され、各パーティクルをそのように遷移させている。
次に、各パーティクルで決定される候補曲線の近傍にある人物152のエッジを、時刻tのエッジ画像を用いて探索することにより、各候補曲線の尤度を求め、時刻tにおける確率密度分布を推定する(S16)。前述のとおり、このときの確率密度分布はS16に示すように、真の確率密度分布400を離散的に表したものになる。以降、これを繰り返すことにより、各時刻における確率密度分布がパラメータ空間において表される。例えば確率密度分布が単峰性であった場合、すなわち追跡対象が唯一であった場合は、得られた確率密度を用いて各パラメータの値に対し重み付けした和を最終的なパラメータとすることにより、追跡対象に最も近い輪郭の曲線が得られることになる。
S16において推定される時刻tにおける確率密度分布p(xt
i)は以下のように計算される。
ここでiはパーティクルに一意に与えられた番号、p(xt
i|xt
i, ut-1)は所定の運動モデル、p(yt|xt
i)は尤度である。
図3は本実施の形態における視覚追跡システムの構成例を示している。視覚追跡システム10は、追跡対象18を撮像する撮像装置12、追跡処理を行う追跡装置14、撮像装置12が撮像した画像のデータや追跡結果のデータを出力する表示装置16を含む。追跡対象18は人、物、それらの一部など、視覚追跡システム10の使用目的によって異なっていてよいが、以後の説明では上記の例同様、人であるとする。
追跡装置14と、撮像装置12あるいは表示装置16との接続は、有線、無線を問わず、また種々のネットワークを介していてもよい。あるいは撮像装置12、追跡装置14、表示装置16のうちいずれか2つ、または全てが組み合わされて一体的に装備されていてもよい。また使用環境によっては、撮像装置12と表示装置16は同時に追跡装置14に接続されていなくてもよい。
撮像装置12は追跡対象18を含む画像、または追跡対象18の有無に関わらずある場所の画像のデータを、所定のフレームレートで取得する。取得された画像データは追跡装置14に入力され、追跡対象18の追跡処理がなされる。処理結果は出力データとして追跡装置14の制御のもと、表示装置16へ出力される。追跡装置14は別の機能を実行するコンピュータを兼ねていてもよく、追跡処理の結果得られたデータ、すなわち追跡対象18の位置情報や形状情報などを利用して様々な機能を実現してよい。
図4は本実施の形態における追跡装置14の構成を詳細に示している。追跡装置14は、撮像装置12から入力される入力画像データを取得する画像取得部20、当該入力画像データや輪郭画像データを記憶する画像記憶部24、入力画像データから輪郭画像を生成する輪郭画像生成部22、追跡の開始および終了を判定する追跡開始終了判定部28、パーティクルフィルタを用いて追跡処理を行う追跡処理部26、最終的な追跡結果のデータを記憶する結果記憶部36、追跡結果の表示装置16への出力を制御する出力制御部40を含む。
図4において、様々な処理を行う機能ブロックとして記載される各要素は、ハードウェア的には、CPU、メモリ、その他のLSIで構成することができ、ソフトウェア的には、画像処理を行うプログラムなどによって実現される。したがって、これらの機能ブロックがハードウェアのみ、ソフトウェアのみ、またはそれらの組合せによっていろいろな形で実現できることは当業者には理解されるところであり、いずれかに限定されるものではない。
輪郭画像生成部22は追跡対象の輪郭線を入力画像の画像フレームから抽出し、輪郭画像を生成する。当該輪郭画像は画像記憶部24に格納され、後に追跡処理部26の観測部30において候補曲線の尤度観測に用いられる。通常、「輪郭線」はエッジ画像における「エッジ」として扱われるため、従来の技術では「エッジ画像」を用いた尤度観測が行われていた。しかし一般的なエッジ抽出フィルタでは、入力画像によっては物の輪郭線以外にも多くのエッジが抽出されるため、輪郭線以外のエッジとのマッチングにより尤度観測が正確に行われないことが考えられる。また、エッジ抽出のしきい値を高く設定してエッジの数を減らすと、輪郭線がとぎれてしまい、やはり尤度観測が正確に行われない可能性がある。
そこで本実施の形態の輪郭画像生成部22は、一般的な「エッジ画像」ではなく、特に入力画像中の物の「輪郭」に着目し、尤度観測を精度よく行うことのできる画像を生成する。具体的な手法は後に述べるが、以後の説明では、輪郭画像生成部22が生成する画像を「輪郭画像」として一般的な「エッジ画像」と区別する。また輪郭画像生成部22は、背景差分を利用した前景抽出器(図示せず)を実装していてもよい。そして輪郭画像生成処理の前処理として入力画像から追跡対象を含む前景を抽出することにより、追跡対象の輪郭を効率的に抽出するようにしてもよい。
追跡開始終了判定部28は、例えば輪郭画像生成部22によって得られた輪郭線または前景の形状を評価し、所定の条件によって、追跡を開始するか終了するかを判定する。なおここでの「終了」はオクルージョンなどによる追跡の一時停止を含んでもよい。追跡は、追跡対象が撮像装置の視野角内に現れた場合や、物陰などから現れた場合などに開始し、追跡対象が撮像装置の視野角内から去った場合や物陰などに入った場合などに終了する。追跡を開始すると判定した場合は、追跡処理部26にその旨の通知をし、追跡処理を開始させる。
追跡処理部26は、サンプリング部29、観測部30、および結果取得部34を含む。サンプリング部29は、一つ前の時刻t-1における画像フレームに対して推定された確率密度分布に基づき、パーティクルの生成および消滅の処理を行う。そして全てのパーティクルに対し所定の運動モデルを適用して、パーティクルをパラメータ空間上で遷移させる。これにより、時刻tの画像フレームにおける複数の候補曲線が決定する。サンプリング部29は、追跡開始終了判定部28から追跡開始を示す信号を受けたら処理を開始し、追跡終了を示す信号を受けたら処理を終了する。
観測部30はサンプリング部が生成・消滅、遷移させた各パーティクルが定める候補曲線の尤度を観測する。例えば各パーティクルが定める候補曲線をそれぞれBスプライン曲線で表現した場合、当該Bスプライン曲線のノットごとに、輪郭画像生成部22が生成した輪郭画像において最近傍にある輪郭線を探索し距離を求めることにより、所定のルールでノットをスコアリングする。そして候補曲線を構成する全ノットのスコアに基づき当該候補曲線の尤度を求める。観測部30は、複数のプロセッサユニットを利用してこの探索処理を並列に実行する。
詳細な手法は後に述べるが、本実施の形態では、輪郭線の探索処理をノットごとに分割したものを一の処理単位とし、複数のプロセッサユニットで並列処理する。各プロセッサユニットは、一のノットの最近傍にある輪郭線を探索するために、輪郭画像のうち、当該ノットとその探索領域を含む一部の領域の画像データのみを配下のローカルメモリにコピーする。この処理を複数のプロセッサで繰り返すことにより、一の追跡対象につき、(パーティクルの数)×(候補曲線を構成するノットの数)の個数の処理単位を短時間で処理する。それぞれのプロセッサユニットが並列に取得した各ノットのスコアは候補曲線ごとに統合し、尤度を算出する。スコアリングや尤度算出の手法は従来技術を採用できる。
結果取得部34は、観測部30が観測した尤度に基づき式3で示すような確率密度分布p(xt
i)を算出し、それにより重み付け平均したパラメータによって得られる曲線のデータなどの追跡結果を算出し、結果記憶部36に格納する。また次の時刻t+1における追跡処理に使用するため、サンプリング部29にそのデータを返す。結果記憶部36に格納するデータは、重み付け平均した各パラメータの値でもよいし、それにより定まる曲線のみで構成される画像や、曲線と入力画像とを合成してできた画像のデータなどのいずれでもよい。
追跡対象が複数存在する場合、結果取得部34はさらに、それぞれに用意したテンプレートを用いて、追跡対象ごとに追跡を行い、それらの追跡結果を合成することによりひとつの追跡結果としてもよい。また複数の追跡対象が重なるような場合を追跡結果によって検出し、後ろに隠れる追跡対象については所定のタイミングで追跡処理対象からはずすなどの措置を講じる。これにより追跡対象が別の追跡対象の背後に回ったことによって観測尤度が一時的に低下しても、不適当な追跡結果を出力するのを避けることができる。
輪郭画像生成部22、追跡処理部26における上述の処理を、各フレームに対して行うことにより、結果記憶部36には例えば追跡結果を含む動画像のデータが記憶される。この場合、出力制御部40の制御のもと、当該動画像のデータを表示装置16に出力することにより、テンプレートの曲線が追跡対象の動きと同様に動く様を表示することができる。なお上述のとおり、追跡結果は動画として表示する以外に、追跡の目的に応じて別の演算モジュールに出力するなどの処理を適宜行ってよい。
次にこれまで述べた構成による追跡装置14の動作について説明する。以下、例としてある場所にいる人物を追跡する場合について説明する。このとき撮像装置12は、撮影対象の場所を所定のフレームレートで撮影する。撮影された画像は入力画像データとして追跡装置14の画像取得部20へ入力され、画像記憶部24に格納される。このような状態において以下に述べる追跡処理が行われる。
図5は本実施の形態における追跡処理の手順を示すフローチャートである。この例の場合、追跡対象は人物であるため、追跡装置14には前述のとおりΩ型のテンプレートを用意する。なおテンプレートの表現手法はBスプライン曲線に限らず、所望の曲線を表現できる記述形式であればよい。またテンプレート形状の変形手法も、その記述形式に適合し、数種類のパラメータを変化させることによって上述のような柔軟な変形を行うことのできる手法を適宜選択してよい。
まず追跡開始終了判定部28は、画像記憶部24に格納された入力画像データをフレームごとに読み出し、追跡を開始するかどうかの判定を行う(S20、S22)。例えば、画像フレームから抽出した前景として、人物と推定できる所定のサイズ、形を有する対象が出現した場合には、追跡を開始する判定を行う。判定基準となる前景のサイズや形はあらかじめ論理的にまたは実験的に定めておく。前景の抽出処理は、輪郭画像生成部22に実装された図示しない前景抽出器を利用してもよい。この場合は、追跡開始終了判定部28が、輪郭画像生成部22に対し前景抽出処理の要求を行う。あるいは追跡開始終了判定部28が前景抽出器を実装していてもよい。
追跡開始と判定されるまでS20とS22を繰り返し、追跡開始と判定されたら(S22のY)、追跡処理部26が追跡処理を開始する。ここで、追跡開始を判定された画像フレームに対応する時刻をt=0とし、以後の画像フレームは時刻t=1,2,3,・・・にそれぞれ対応するとする。まず、サンプリング部29が輪郭画像生成部22に対し、輪郭画像生成処理の要求を行うことにより、輪郭画像生成部22はt=0画像フレームの輪郭画像を生成する(S26)。このときサンプリング部29は、後続フレームの輪郭画像生成処理要求も行い、輪郭画像生成部22は順次処理を行ってよい。
そしてサンプリング部29は、例えばパラメータ空間の所定領域に均等にパーティクルを配置してサンプリングを行い、観測部30が各パーティクルが定める候補曲線と輪郭画像とをマッチングすることにより尤度を観測し、結果取得部34が式3により率密度分布の初期値p(x0
i)を算出する(S28、S30、S32)。
一方、輪郭画像生成部22は、画像記憶部24より時刻t=1の画像フレームを読み出し輪郭画像を生成する(S34のN、S26)。サンプリング部29は、生成した確率密度分布の初期値p(x0
i)に対応した数のパーティクルをパラメータ空間上に発生させ、所定の運動モデルに基づきパーティクルをそれぞれ遷移させることによりサンプリングを行う(S28)。発生させるパーティクルの数は、追跡装置14が有する演算リソースの量や、求められる結果出力速度などに基づき、処理の負荷を考慮して制御する。運動モデルは追跡対象の種類に応じてガウシアン型運動モデル、自己回帰予測型運動モデルなどから追跡精度が高く得られるものをあらかじめ決定しておく。
すると観測部30は、遷移後のパーティクルが定める各候補曲線の尤度p(yt|xt
i)を観測する(S30)。尤度の観測は、輪郭画像生成部22が生成した時刻t=1の輪郭画像を用いて、各候補曲線近傍にある輪郭線を探索することにより行われる。このとき上述のとおり、探索処理をノットごとに複数のプロセッサに割り振る。詳細は後に述べる。
次いで結果取得部34は、観測された尤度に基づき時刻t=1の確率密度分布p(x1
i)を求める。複数の追跡対象が存在する場合は、上記の処理を全ての追跡対象について行う。そして結果取得部34は、時刻t=1における追跡対象の形状および位置として、確率密度分布p(x1
i)によって各パラメータを重み付け平均して得られるΩ型の曲線を最終的に決定し、元の入力画像フレームに重ねた画像フレームのデータを生成するなど、所望の追跡結果データを生成して結果記憶部に保存する(S32)。
追跡開始終了判定部28は、追跡処理をこれ以上続行するか終了するかの判定を行う(S34)。例えば人物と推定できる所定のサイズ、形を有する対象が前景として現れない状態が所定時間継続した場合に追跡終了の判定を行う。あるいは、実空間上においてある追跡対象が別の追跡対象の背後に回った場合など、オクルージョンの状態が所定時間継続した場合に追跡終了の判定を行う。オクルージョンの状態は、過去の追跡処理結果から推定してもよいし、図示しない距離計測系などによって検出してもよい。さらに、追跡対象が撮像装置12の画角から外れた状態が所定時間継続した状況も、オクルージョンと同様の手法で検出し、追跡終了の判定を行う。
S34において追跡処理を終了しないと判定した場合は(S34のN)、時刻t=2の画像フレームから輪郭画像を生成するとともに、S32で得られた時刻t=1のときの確率密度分布p(x1
i)を用いて、パーティクルの生成または消滅、および運動モデルによる遷移を行い、時刻t=2のフレームに対する尤度観測、確率密度分布算出を行う(S26~S32)。以降、S34で追跡開始終了判定部28が追跡終了の判定を行うまでS26からS32までの処理を、各フレームに対して繰り返す。これにより、Ω型の曲線が追跡対象の来訪者の頭部と同じ動きおよび形状で、時間に対して変化していくような動画のデータが結果記憶部36に格納される。出力制御部40が当該データを、表示装置16や別の機能を提供するモジュールなどに出力することにより、ユーザは所望の形態で追跡結果を利用することができる。
次にS30において観測部30が候補曲線と輪郭画像上の輪郭線とをマッチングして尤度を観測する処理について説明する。図6は観測部30の構成をより詳細に示している。観測部30は、輪郭画像切り出し部50、輪郭探索タスクキュー52、輪郭探索部56、尤度取得部54を含む。輪郭画像切り出し部50は、候補曲線を表す曲線のノットの座標に基づき、各ノットに対応する領域を輪郭画像から切り出す。ここで各ノットに対応する領域とは、当該ノットとそのノットのための探索領域を含む領域である。探索領域と等しくてもよく、以後の説明では「探索領域」とも呼ぶ。そしてノットの座標情報と、対応する領域に係る情報とを含む輪郭探索の処理要求を発行する。発行された処理要求は輪郭探索タスクキュー52における処理待ち行列に加えられる。
輪郭探索部56は、第1処理部58a、第2処理部58b、第3処理部58c、・・・、第N処理部58nのN個の処理ユニットと、それぞれに接続するローカルメモリ60a、60b、60c、・・・、60nを含む。各処理ユニットは、輪郭探索タスクキュー52より輪郭探索処理要求を順次読み出し、要求されたノットに対して輪郭探索処理を実行する。具体的には、画像記憶部24に格納された輪郭画像から、処理要求で指定された領域の画像データを配下のローカルメモリにコピーする。そして指定されたノットの座標に基づき、当該ノットの最近傍にある輪郭線を、ローカルメモリにコピーした領域内で探索し、所定の規則に則りスコアリングする。
輪郭の探索には一般的に用いられるエッジ探索の手法を利用することができる。そして探索領域は、選択した探索手法やマッチングに求められる精度により決定することができる。第1処理部58a、第2処理部58b、第3処理部58c、・・・、第N処理部58nは各自、1つの処理要求を実行すると、得られたスコアを尤度取得部54に出力する。そして次の輪郭探索処理要求を輪郭探索タスクキュー52より読み出し、同様の処理を繰り返す。
尤度取得部54は、輪郭探索部の第1処理部58a、第2処理部58b、第3処理部58c、・・・、第N処理部58nからそれぞれ入力された各ノットのスコアを統合して、候補曲線ごとの尤度を算出する。具体的には候補曲線を構成する全ノットのスコアを集めて合計したり、平均値を算出したり、所定の変換式に代入する。輪郭探索部56の各処理ユニットからはノットに対するスコアが次々出力されるが、ノットの識別情報と、そのノットが属する候補曲線の識別情報とを対応付けた情報を、観測部30内で共通に保持しておき、処理要求やスコアの出力時に、必要な識別情報を含めることにより、候補曲線ごとに結果を統合できる。
図7は、輪郭探索部56の第1処理部58a、第2処理部58b、第3処理部58c、・・・、第N処理部58nが輪郭探索処理要求に従い、画像記憶部24に格納された輪郭画像から、指定された領域の画像データを各自のローカルメモリ60a、60b、60c、・・・、60dにコピーする様子を模式的に示している。まず画像記憶部24には、輪郭画像生成部22が生成した輪郭画像90が格納されている。そしてサンプリング部29が決定したパーティクルによって、候補曲線の各ノット92の座標が定められる。
輪郭画像切り出し部50はノット92の座標を取得すると、そのノットの探索領域94をノットごとに切り出す。探索領域の決定の仕方は、精度、メモリ容量、処理速度などに鑑み決定する。図7の例では、ノット92の座標を重心とする正方形を探索領域94として切り出している。探索精度の観点から、探索領域94の大きさは、候補曲線の大きさによって変化させることが望ましい。例えば、候補曲線がとり得る最大サイズに対する探索領域94の最大データサイズを、ローカルメモリ60a、60b、60c、・・・、60dのコピー領域に格納できる最大データサイズと等しくなるように設定する。そして探索領域94を、候補曲線の大きさの比率に応じて変化させることにより正方形の大きさを決定する。候補曲線の大きさは、各パーティクルが有するパラメータのうち倍率(extendx,extendy)に基づき決定できる。
探索領域94の決定の仕方は図7で示したものに限らない。後に述べるように当該領域の画像データをローカルメモリ60a、60b、60c、・・・、60dにコピーする時間や、探索処理に要する時間などを考慮して増減させてもよい。また、探索領域94の重心にノットがなくてもよい。例えばパーティクルを運動モデルによって遷移させた際用いた自己回帰予測モデルによって追跡対象の動きを推定し、動くと推定される方向に探索領域94を広く設けるようにしてもよい。また探索領域94は正方形でなくてもよく、探索手法や追跡対象の動きの特徴などによってその他の矩形や菱形、横や縦一列の画素などでもよい。
輪郭画像切り出し部50は、ノット92の座標とそれに対応する探索領域94の情報、例えば正方形の一角の座標と一辺の長さの情報、を含む輪郭探索処理要求を輪郭探索タスクキュー52に入れる。輪郭探索部の第1処理部58a、第2処理部58b、第3処理部58c、・・・、第N処理部58nは、輪郭探索タスクキュー52から輪郭探索処理要求を1つ読み込むと、当該要求に含まれる正方形の情報に基づき画像記憶部24に格納された輪郭画像90から正方形の領域の画像データのみを、配下のローカルメモリにコピーする。
本実施の形態では、処理単位をノットごととすることにより、一の処理単位に必要なデータの量を限定的にしている。すなわち一の候補曲線に対する輪郭線の探索を処理単位とした場合などと比較し、ノットごとに処理を分割することにより探索領域のデータ量が格段に小さくなるうえ、候補曲線の大きさに影響をうけにくい。これにより、追跡対象がいかなる大きさであっても、ローカルメモリへの格納が可能となる。ローカルメモリは一般的に、容量が小さい一方で高速アクセスが可能である。そのため、ノットごとに探索領域を定め、その領域の画像データのみをコピーするようにすることで、並列処理による効果とともに、高速な追跡処理が可能となる。この効果は、複数のプロセッサを有するいかなる情報処理装置でも得ることができる。特にこのような構成とすると、「ヘテロジニアスマルチコア」を実装する情報処理装置への適用が容易となる。
「ヘテロジニアスマルチコア」は異種のコアを実装する情報処理装置であり、各コアが使用するメモリ容量が小さい、各コアのメモリに処理に必要なデータをコピーする必要がある、といった特徴を有する。上述のように探索領域94を定めると、その画像データのサイズは、各コアが有するメモリ容量より小さくできる。これにより本実施の形態をヘテロジニアスマルチコアに適用することが可能となり、装置を限定せずに高速な追跡処理を実現できる。
なお輪郭探索部56に含まれる第1処理部58a~第N処理部58nの機能を実現する複数のプロセッサユニットのいずれかが、輪郭画像切り出し部50および尤度取得部54を兼ねていてもよい。さらに追跡装置14に含まれる観測部30以外の各機能も、複数のプロセッサユニットのいずれかが実現するようにしてよい。
図8は輪郭探索部56の第1処理部58a、第2処理部58b、・・・、第N処理部58nが輪郭探索処理を行う際の処理の推移を模式的に示している。図の右方向を時間軸とし、時刻T1から、第1処理部58a~第N処理部58nのN個の処理部が、ある候補曲線のノット1、ノット2、・・・、ノットNについての探索処理要求を実行する。輪郭探索タスクキュー52から探索処理要求を読み出すと、各処理部は画像記憶部24の輪郭画像から、当該探索処理要求が指定する領域の画像データを配下のローカルメモリにコピーし、探索処理を開始する。図8では、コピーに要する時間と探索に要する時間をそれぞれ矩形で表している。
本実施の形態では、あるノットについて輪郭の探索を行っている間に、次に輪郭探索タスクキュー52から読み出した探索処理要求が指定する領域のコピーを開始するようにパイプライン処理することでさらなる処理時間の短縮を実現する。同図の例では、時刻T1において、第1処理部58aがノット1に対応する領域、第2処理部58bがノット2に対応する領域、・・・、第N処理部58nがノットNに対応する領域の画像データのコピーをそれぞれ開始する。そしてコピーが終了した時刻T2において、コピーした領域内での輪郭線の探索を開始する。このとき第1処理部58a、第2処理部58b、・・・、第N処理部58nは、ノットNの次に探索処理要求が発行されているノットN+1、ノットN+2、・・・、ノット2Nの探索領域のコピーを、パイプライン処理により開始する。
そして前のノットの探索処理が終了し、かつ、次のノットの探索領域のコピーが終了した時刻T3から、コピーした領域内での輪郭線の探索を開始する。以後、ノット2N+1~3N、ノット3N+1~4N、・・・について、それぞれの処理部がコピー、探索の処理を、探索時間中に次の領域のコピーを開始するようにして繰り返す。これにより、探索処理を並列化することによって発生するコピー処理の時間を最小限に抑えることができ、並列処理、ローカルメモリに対する高速アクセスといった構成による処理速度の向上をより効果的に実現できる。
図8はコピーに要する時間と探索処理に要する時間がほぼ同一の場合を示しているが、本実施の形態をそれに限る趣旨ではない。すなわち、ある領域について輪郭探索処理を行っている時間帯のいずれかのタイミングで次の処理対象の領域のコピーを開始し、前の探索が終了しコピーも終了したら当該領域について探索処理を行うような態様であればよい。ただし図8に示したようにコピー時間と探索処理時間がほぼ等しいと、コピーの完了を待ちにより探索処理が開始されないといったオーバーヘッドを吸収することができる。輪郭画像全体をコピーして全ノットに対し連続的に輪郭探索を行うようにした場合、最初に大きなサイズの画像データをコピーする時間が必要となるため、このような場合と比較しても、上述のようにすると処理時間が短縮できる。
そのため、コピーに要する時間と探索処理に要する時間が同程度となるように、探索領域の大きさを調整するようにしてもよい。例えば実際の追跡処理前に、同様の画像構成を有するテスト画像を用いて様々なサイズの探索領域で実験を行って、各処理の所用サイクル数を実測し、それらがおよそ等しくなるように切り出す領域のサイズを決定するようにしてもよい。このとき、輪郭画像切り出し部50が輪郭探索部56を制御して実際に探索処理を行わせ、コピーおよび探索処理に要する時間を取得することで、最も効率のよい探索領域のサイズを決定するようにフィードバック制御してもよい。
同様に、切り出す領域のサイズを別の観点から調整するようにしてもよい。例えば撮影中の画像における対象物をリアルタイムで追跡する場合など、尤度観測にかけることのできる時間が限られている場合がある。このような状況下では、追跡対象の数が多くなる程、一のノットに対する輪郭探索を短縮する必要がある。このような場合も、実際の追跡処理に先んじて実験することにより領域のサイズを調整し、サイズを小さくすることによってコピーおよび探索処理の時間を短縮できる。あるいは、様々な追跡対象の数に対して探索領域の最適サイズを設定したテーブルをあらかじめ準備しておき、追跡開始後、追跡対象の数を取得したら輪郭画像切り出し部50が当該テーブルを参照することにより探索領域のサイズを決定するようにしてもよい。
追跡対象の数以外に、候補曲線の形状、動作の複雑性、画像のコントラストなど、追跡のしやすさを決定づけるパラメータと、求められる追跡精度など多角的な要素から探索領域のサイズを決定できるテーブルを準備してもよい。
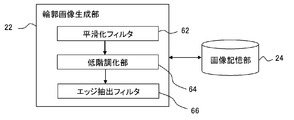
次に輪郭画像生成部22による輪郭画像の生成処理について説明する。図9は輪郭画像生成部22の詳細な構成を示している。輪郭画像生成部22は、平滑化フィルタ62、低階調化部64、エッジ抽出フィルタ66を含む。輪郭画像生成部22は、画像記憶部24に格納された入力画像の画像フレームを読み出し、平滑化フィルタ62による平滑化、低階調化部64による低階調化、エッジ抽出フィルタ66によるエッジ抽出をこの順で施すことにより、輪郭画像を生成する。
輪郭画像生成部22が輪郭画像を生成する原理は次の通りである。図10は一般的なエッジ抽出処理と本実施の形態における輪郭画像生成処理との差を説明するための図である。同図におけるグラフの横軸は全て、画像の位置、すなわち画素の並びを表し、範囲は共通とする。最上段のグラフは、入力画像である原画像の輝度値の分布を表している。同図は一例として、矢印で表す領域110に追跡対象の像があり、画素Aと画素Bに追跡対象の輪郭があるような画素列を示している。
この原画像の輝度値の分布をみると、画素A近傍の輝度値の変化は画素B近傍の輝度値の変化より位置に対してなだらかである。このようなことは、画素A近傍で追跡対象と背景の色が似通っていたり、画素A側だけ日影に入っていたりすることにより、頻繁に起こりうる。また、追跡対象の像の領域110内においても色が変化していたり影ができていたりしてその輝度値は一定ではなく、凹凸112のような輝度値の変動がある。
このような輝度値の分布を示す原画像のエッジ画像を生成する場合、一般的にはラプラシアンフィルタなどのエッジ抽出フィルタでフィルタリングすることによってエッジを抽出する。このとき、輝度値の画像平面に対する変化の大きさに対してあるしきい値を設定し、そのしきい値を超えるような変化が見られる箇所をエッジとして抽出する。図10の2段目はそのようにエッジ画像を生成した場合のグラフを示している。すなわち当該グラフに示すような輝度値の変化量の大きさがエッジ値として算出され、あらかじめ設定されたしきい値116を上回るエッジ値を有する箇所、すなわち画素B近傍の画素がエッジとして抽出される。
しかし図10の例では、もう一方の輪郭である画素A近傍は、そのエッジ値がしきい値116より小さいためエッジとして抽出されない。画素A近傍をエッジとして抽出するためにはしきい値116を小さく設定することになるが、そのようにすることで、輪郭と関係しないが輝度値の凹凸112によって比較的大きなエッジ値を有する箇所114もエッジとして抽出されてしまう。本実施の形態では、追跡対象の輪郭に対して候補曲線を設定し、実際の輪郭とマッチングすることにより尤度を観測して追跡対象の位置を推定する。したがって、輪郭線に抽出されない箇所が存在したり、逆に輪郭以外の線が多く抽出されたりすると、当然、追跡精度が低くなる。そのため精度よい追跡を行うためには、これらの状況を回避できるしきい値116の最適値を見つけ出す必要があるが、画像ごとに最適値が変化するほか、画像によってはそもそも最適値といえるしきい値がない、といった状況が発生し得る。
そこで本実施の形態では、画像中の線やグラデーションなどの詳細な情報より、物を面として大まかに捉えることにより、「画像中のエッジ」というより「物の輪郭」を抽出できるようにする。具体的には、図10の3段目に示すように、原画像の輝度値を低階調化した低階調画像を生成する。同図では理解を容易にするために原画像の輝度値を3階調で表している。すると、輝度値の画像平面上の変化と関わりなく、追跡対象が存在する領域110の輝度値は、他の領域の輝度値から不連続に変化し、領域として追跡対象の存在を表す情報となる。
この低階調画像にエッジ抽出フィルタを施すと、低階調化した輝度値が不連続に変化した箇所にのみ値を有する図10の4段目に示すようなエッジ値が得られる。このようなエッジ値の場合、エッジ値が突出した箇所が限定的となるため、しきい値118を詳細に最適化する必要もなく、輪郭画像を容易に得ることができる。
図9に示した構成において輪郭画像生成部22はまず、入力画像の画像フレームを平滑化フィルタ62により平滑化する。平滑化フィルタ62としては、ガウシアンフィルタ、メディアンフィルタ、単純平均化フィルタ、ローパスフィルタなど一般的な平滑化フィルタを用いることができる。これにより余分な高周波成分を除去して、物の面を領域として捉えやすくする。次に低階調化部64によって、上述のような低階調化画像を生成する。低階調化部64は一般的なビットシフト操作で実現でき、あらかじめ定めた境界で輝度値を区分けし、各区分内の輝度値を一の輝度値に変換する。このとき、輝度値を下から均等に区分けしてもよいし、画像フレームのカラーヒストグラムを作成し、区分けした際、画素の数が均等になるような輝度値を境界としてもよい。一般的なポスタリゼーションの手法を用いてもよい。低階調画像の階調数は例えば8~32階調程度とすることができる。
また追跡対象や背景、画像の内容、種別などによって、低階調画像の階調数を設定し直すようにしてもよい。この場合、実際の追跡時と同様のテスト画像などによって様々な階調の低階調画像を生成し、最も精度よく輪郭画像が生成できる、または追跡を失敗しない階調を求める。次に、低階調化部64によって得られた低階調画像にエッジ抽出フィルタ66を施すことにより輪郭画像を生成する。エッジ抽出フィルタ66として、ラプラシアンフィルタ、ソーベルフィルタ、キャニーエッジフィルタなど一般的なエッジ抽出フィルタを利用することができる。これにより、輪郭部分とその他の部分で値の異なる2値画像が輪郭画像として得られる。
次に本実施の形態の輪郭画像生成手法を実際の画像に適用した結果を、一般的なエッジ画像とともに示す。まず図11は処理対象である原画像の例を示す。図12、13は、当該原画像に対し一般的なエッジ画像生成手法でエッジ画像を生成した結果を示しており、図12はしきい値が低い場合、図13はしきい値が高い場合のエッジ画像である。まず図12では、被写体である人物の輪郭の他に、服の模様、しわや顔の部位など、多くのエッジが抽出され、輪郭との区別がつきにくい。また人物の頭部左側の影となっている部分などはエッジがほとんど抽出されていない。しきい値を大きくすると、図13に示すように、抽出されるエッジが少なくなり、輪郭もほとんど抽出されなくなってしまう。
図14は、本実施の形態における輪郭画像生成部22の平滑化フィルタ62、低階調化部64が図11で示した原画像を処理することによって得られた低階調画像を示している。同図に示すように低階調画像では、図12のエッジ画像で見られるような、服の模様などの詳細な情報は省かれ、人物や物の面を領域として捉えた画像となっている。図15はエッジ抽出フィルタ66によって当該低階調画像にエッジ抽出処理を施して生成される輪郭画像を示す。同図では、人物や物の輪郭がおよそ連続した線で表されており、図12ではエッジが抽出されなかった、人物の頭部左側も輪郭線が抽出されている。
本実施の形態は画像内の人物や物の動きを追跡することを主な目的としているため、画素レベルでの画像の詳細な情報より、輪郭線の存在およびおよその位置の情報を優先して取り出すことにより、追跡対象を取り違えたり見失ったりすることなくその動きを正しく検出することができる。低階調化の処理は、輝度値に基づき画像を粗く領域に分割する意味を持ち、これにより発生する領域の境界を輪郭ととらえるため、途中で線がとぎれることが少なく、探索が容易となる。
また一般的なエッジ画像は、エッジ値がしきい値を上回る画素がある幅をもって表れる場合が多い。これは図10の2段目に示したように、通常のエッジ値が多階調でおよそ連続的に変化し、ある幅をもってピークに到達するためである。さらにエッジを確実に抽出しようとしきい値116を低く設定するほど抽出されるエッジの幅も広くなる。一方、本実施の形態の輪郭画像は、隣り合う画素でも階調が大きく変化し、1つの画素でエッジ値がピークとなるため、抽出される箇所が画素単位となり、結果として抽出結果が線状になる。エッジが幅をもっていると、候補曲線とマッチングするためにエッジを細線化する処理が必要となるが、本実施の形態における輪郭線の場合はその処理が必要なくなり、より簡素な構成で高速に追跡処理を行うことができる。
以上述べた本実施の形態によれば、パーティクルフィルタを用いた視覚追跡装置において各パーティクルの尤度を観測する際、パーティクルが定める候補曲線のノットに着目し、ノットごとに輪郭探索の処理を分割して複数のプロセッサに割り当て、並列に処理する。輪郭探索の処理はノットごとに独立であるため、プロセッサへの割り振りや結果の統合が容易である。また、一のノットに対する輪郭探索処理に必要な画像データは、当該ノットの近傍の限られた領域であるため、そのデータサイズが小さく、各プロセッサは当該データをローカルメモリへコピーして輪郭探索処理を実行できる。そのため輪郭画像データへのアクセスを高速に行え、処理速度をさらに向上できる。
元の動画の輪郭画像からローカルメモリへのコピーが可能なサイズの領域を切り出すことにより、ヘテロジニアスマルチコアのように、データを各コアにコピーして処理を遂行することを前提とした構造を有する情報処理装置への適用が可能となる。これにより、特にハイビジョン映像など高画質画像に対する追跡処理でも、装置の構造を問わず高速に処理できるようになる。
例えば追跡対象ごとに探索処理を分割して並列処理した場合、追跡対象の数によって必要となるプロセッサの数が変動するため、追跡対象の数がプロセッサの数より小さいと装置の処理能力を十分使い切れなくなる。逆に追跡対象の数がプロセッサの数より大きいと、割り振れなかった一部の処理を後から実行することになり、結局は処理能力を余らせてしまう可能性がある。また、追跡対象の大きさによって個々の探索処理に必要な画像データサイズが大きく変動するため、メモリ容量不足やデータ転送時間の変動などが起こりうる。このように入力画像の内容によって処理時間や必要なメモリサイズが大きく変動すると、装置の仕様を決定するうえでの障害となりうるほか、汎用性に乏しくなる。
一方本実施の形態では、ノットごとに探索処理を分割して処理単位の粒度を細かく、処理単位の数を多くしたことにより、追跡人数や追跡対象の大きさなど追跡条件が変化しても、処理時間や必要なメモリサイズへの影響が少なく、それらのパラメータを見積もりやすい。そのため装置の仕様を容易に決定でき、入力画像の内容に関わらず好適な環境で追跡処理を行うことができる。同様に、プロセッサの数によらず同様の処理手順で並列処理が可能であり、1フレームにつき数千個オーダー以上の処理単位が生成されるため、各プロセッサへ容易に割り振ることができるうえ、一の処理単位は比較的短時間で終了するためスケーラビリティが高い。
またノットごとの探索処理を処理単位とすることで、処理単位同士に依存関係がないため、あるノットについて輪郭探索処理を行っている間に、次の処理対象である領域のコピーを開始するようにパイプライン処理が可能となる。これにより、ローカルメモリへのコピー時間を探索処理時間で吸収することができ、処理の並列化との相乗効果により、より高速な処理が可能になる。特に、輪郭画像から切り出す領域のサイズを変化させることにより、コピーに要する時間と探索処理に要する時間、およびそれらのバランスを調整することができ、追跡精度と処理時間のいずれを優先させるかといったユーザの意志を反映させることが容易にできる。
さらに輪郭画像を生成する際は、まず元の画像を平滑化、低階調化することにより撮像対象の面を大まかに捉えて領域分けしてからエッジ抽出を行う。これにより、面と面との境界を輪郭線として抽出することができる。通常のエッジ抽出処理では、抽出のためのしきい値によって輪郭線以外の余分なエッジが多く抽出されたり、輪郭線がとぎれてしまったり、といったことが起こり、追跡精度に影響を与えていた。本実施の形態では、上述のとおり面と面との境界が強調されるため、しきい値の許容範囲が広く、輪郭線を容易に抽出できる。
また、低階調化する前処理として画像を平滑化することにより、面を捉えるのに有効な情報を抽出し、より正確に低階調画像、ひいては精度のよい輪郭画像を生成できる。例えば上記のように、輪郭画像生成に用いられる平滑化フィルタ、低階調部、エッジ抽出フィルタはいずれもラスタースキャンでの処理が可能であり、かつラインごとに独立した処理であるため、高速処理が可能となる。また、本実施の形態で生成する輪郭画像は、その輪郭が1画素分の幅を有する線状に表れるため、尤度観測のための細線化処理の必要もなくなる。
実施の形態2
実施の形態1ではノットと探索領域を一対一に対応させて切り出しを行い、各ノットに対して輪郭探索要求が発行された。本実施の形態では、あらかじめ輪郭画像を所定のサイズに分割しておき、分割後の領域単位で輪郭探索要求を発行する。追跡装置14や観測部30の構成は、図4および図6で示したのと同様であり、主な処理手順も実施の形態1で説明した手順と同様である。以下、実施の形態1と同様の処理については説明を省略し、実施の形態1と異なる点に着目して説明する。
実施の形態1ではノットと探索領域を一対一に対応させて切り出しを行い、各ノットに対して輪郭探索要求が発行された。本実施の形態では、あらかじめ輪郭画像を所定のサイズに分割しておき、分割後の領域単位で輪郭探索要求を発行する。追跡装置14や観測部30の構成は、図4および図6で示したのと同様であり、主な処理手順も実施の形態1で説明した手順と同様である。以下、実施の形態1と同様の処理については説明を省略し、実施の形態1と異なる点に着目して説明する。
図16は本実施の形態において、輪郭探索部の第1処理部58a、第2処理部58b、第3処理部58c、・・・、第N処理部58nが、画像記憶部24に格納された輪郭画像から、分割後の領域の画像データを各自のローカルメモリ60a、60b、60c、・・・、60nにコピーする様子を模式的に示している。本実施の形態では、輪郭画像をノットの位置に関わらず分割する。同図では輪郭画像90を横方向に6等分、縦方向に5等分している。この際、分割後の各領域98のサイズがローカルメモリ60a、60b、60c、・・・、60nの容量以下となるようにあらかじめ分割数を決定しておく。また分割は均等に行わなくてもよい。このような分割パターンの座標情報はあらかじめ設定したものを画像記憶部24などに格納しておき、画像切り出し部50がその情報を読み出す。
そして画像切り出し部50は、候補曲線のノット96がどの領域に含まれるかを、サンプリング部29が決定したパーティクルが定める全ての候補曲線について求める。そして、ノット96を含む領域98を抽出し、当該領域に係る情報と当該領域98に含まれる全てのノットの座標の情報を含む輪郭探索処理要求を輪郭探索タスクキュー52に発行する。分割パターンの境界線の座標情報と分割後の領域98の識別情報とを対応付けて画像記憶部24に記憶させておくことにより、輪郭探索要求に含める領域に係る情報は、当該識別情報のみでもよくなる。
輪郭探索部56の第1処理部58a、第2処理部58b、第3処理部58c、・・・、第N処理部58nは、輪郭探索タスクキュー52から輪郭探索処理要求を1つ読み込むと、指定された領域98の識別情報などに基づき画像記憶部24に格納された輪郭画像90から指定された領域98の画像データを、配下のローカルメモリにコピーする。そしてノットの座標情報に基づき、ノットの最近傍にある輪郭線を、コピーした領域内で探索する。コピーした領域に複数のノットが含まれる場合は、全てのノットについて連続して輪郭線探索を行い、ノットごとにスコアリングした結果を尤度取得部54に出力する。コピーした領域に含まれる全てのノットについて探索が完了したら、次の輪郭探索処理要求を輪郭探索タスクキュー52より読み出し、同様の処理を繰り返す。
例えばある人物の追跡を行う場合、輪郭探索を行うべきノットは、当該人物の輪郭の近傍に集中していると考えられる。ノットが互いに近接していると、それぞれの探索領域が重なり合っていることが多くなる。本実施の形態ではその性質を利用して、領域のコピー処理の頻度を減らす。そして一回にコピーした領域の一部の領域を対象とする探索処理は、どの候補曲線のノットかに関わらず一度に実行することにより処理の効率を上げる。
この場合も、実施の形態1で説明したのと同様、尤度取得部54はノットの情報とそのノットが属する候補曲線の識別情報とを対応付けた情報を参照することにより、候補曲線ごとに尤度を取得できる。
以上述べた本実施の形態によれば、輪郭画像を所定のパターンで分割し、分割後の領域ごとに輪郭探索の処理を分割して複数のプロセッサに割り当て、並列に処理する。各プロセッサは、分割後の領域をローカルメモリへコピーし、候補曲線に関わらず当該領域に含まれる全ノットについて、コピーした領域内で輪郭線の探索を行う。パーティクルフィルタの性質上、複数の候補曲線が互いに近接し、ノットが限られた領域に多数存在する状況が多く発生するが、このような場合に1度にコピーした領域を利用して複数のノットの探索を行うことができ、効率性が向上する。結果的に、実施の形態1で述べた並列処理やローカルメモリを利用することとの相乗効果で、より高速に処理を進捗させることができる。
以上、本発明を実施の形態をもとに説明した。上記実施の形態は例示であり、それらの各構成要素や各処理プロセスの組合せにいろいろな変形例が可能なこと、またそうした変形例も本発明の範囲にあることは当業者に理解されるところである。
例えば、実施の形態1において、輪郭画像生成部22は、図9に示すように平滑化フィルタ62、低階調化部64、エッジ抽出フィルタ66を含み、これらの処理により輪郭画像を生成した。一方、輪郭画像生成部22は、一般的なエッジ抽出器であってもよく、例えば平滑化フィルタ62とエッジ抽出フィルタ66のみの構成としてもよい。例えば追跡対象の表面や背景が複雑な変化をしていない場合はエッジ抽出器での輪郭画像生成も可能である。この場合も、生成されたエッジ画像を用いてエッジ探索を行うことにより尤度を観測できる。そして処理の並列化などによって高速の追跡処理が可能となる。
また、輪郭画像生成部22は図示しない前景抽出器によって輪郭画像を生成してもよい。例えばサッカーの試合の映像を入力画像として、選手の動きを追跡するような場合、主な背景はグラウンドであり、選手はユニフォームを着ているため、それぞれの画素値が限定的である。このような場合は、一般的な前景抽出処理により、精度よく追跡対象の輪郭を抽出することができる。輪郭画像生成部22が上記したどの処理を行うかを、入力画像の種類などにより決定できるように、それらを対応付けたテーブルを準備しておいてもよい。あるいはユーザが設定を変更できるようにしてもよい。
さらに、輪郭画像生成部22を追跡装置14以外の画像処理装置に備えてもよい。例えば、自動で写真撮影を行う装置に備え、被写体の画像を一旦取り込み、輪郭画像生成部22によって被写体の輪郭画像を生成してもよい。この場合、輪郭画像から被写体の位置を算出し、その情報をカメラの向きや位置の制御装置へフィードバックすることにより、被写体が写真の中央など所望の位置に写るように自動調整を行う。あるいはレタッチ装置に備え、入力された画像において被写体の輪郭線を抽出することにより、特定の物以外の領域あるいは物の内部の領域のみに所望の加工を施すなどの機能を実現できる。
さらに、FAXで送信された書面や、ダビングされた録画テープに記録された映像内のテロップなど、字の輪郭が不明確になるような状況において、それらを画像として取り込み輪郭画像生成部22に入力することにより、不明確な部分に境界を設けることができ、結果として字の輪郭がはっきりする。したがって、OCR(Optical Character Reader)やデータ形式変換器などに備えることも有効である。
以上のように本発明は視覚追跡装置、コンピュータ、ゲーム機、撮像装置、動画再生装置などの情報処理装置に利用可能である。
Claims (13)
- 追跡したい対象物を撮影した動画像データを構成する画像ストリームに含まれる第1の画像フレームおよび第2の画像フレームのうち、前記第1の画像フレームにおける対象物の推定存在確率分布に基づき、前記第2の画像フレームにおける対象物の候補輪郭を定める候補輪郭決定部と、
前記候補輪郭決定部が定めた候補輪郭と、前記第2の画像フレームのエッジ画像とをマッチングして、前記候補輪郭の尤度を観測する観測部と、
前記観測部が観測した尤度に基づき、前記第2の画像フレームにおける対象物の存在確率分布を推定する結果取得部と、を備え、
前記観測部は、
前記候補輪郭の曲線を構成するノットから最近傍にあるエッジを探索する処理を、当該ノットごとに並列に実行する複数の探索部と、
前記探索部が探索した結果を統合して前記候補輪郭ごとに尤度を求める尤度取得部と、
を備えたことを特徴とする対象物追跡装置。 - 前記候補輪郭決定部は、前記第1の画像フレームにおける対象物の推定存在確率分布に基づき、前記第2の画像フレームにおける対象物の候補輪郭を定めるパラメータ空間上にパーティクルフィルタに用いるパーティクルを生成し、各パーティクルを所定の運動モデルに則り遷移させることにより前記候補輪郭を定めることを特徴とする請求項1に記載の対象物追跡装置。
- 前記探索部は、探索処理対象のノットとその探索領域を含む領域の画像データを前記エッジ画像から切り出して配下のローカルメモリに保存したうえ、当該探索処理を実行することを特徴とする請求項1または2に記載の対象物追跡装置。
- 前記探索部は、探索処理対象のノットを重心とする矩形の領域の画像データを前記エッジ画像から切り出すことを特徴とする請求項3に記載の対象物追跡装置。
- 前記探索部は、あらかじめ定められた分割パターンで分割された前記エッジ画像のうち、探索処理対象のノットを含む領域の画像データを前記エッジ画像から切り出して前記ローカルメモリに保存し、当該ノットについての探索処理後、保存した領域に含まれる全ノットについての探索処理を連続して実行することを特徴とする請求項3に記載の対象物追跡装置。
- 前記探索部は、前記候補輪郭の大きさによって切り出す領域のサイズを変化させることを特徴とする請求項3に記載の対象物追跡装置。
- 前記探索部は、あるノットについて探索処理を行っている期間内に、次のノットの探索処理のために前記エッジ画像から切り出した領域のローカルメモリへの保存処理を開始することを特徴とする請求項3に記載の対象物追跡装置。
- 前記探索部は、前記ローカルメモリへの保存処理に要する時間と前記探索処理に要する時間を実測し、それらの時間が所定の条件を満たすように、切り出す領域のサイズを調整することを特徴とする請求項7に記載の対象物追跡装置。
- 前記探索部は、あらかじめ設定した、追跡対象の数に対する切り出す領域の最適サイズを参照し、実際の追跡対象の数に応じて切り出す領域のサイズを決定することを特徴とする請求項3に記載の対象物追跡装置。
- 前記探索部は、探索処理対象のノットの座標情報と、当該ノットに対応して前記エッジ画像から切り出す領域に係る情報とを含む輪郭探索の処理要求をタスクキューに格納する輪郭画像切り出し部と、
前記タスクキューから処理要求を順次読み出し、当該処理要求に応じて前記エッジ画像から切り出した領域をローカルメモリへ保存したうえ探索処理を実行する複数の探索処理ユニットと
を備えたことを特徴とする請求項3に記載の対象物追跡装置。 - 追跡したい対象物を撮影した動画像データを構成する画像ストリームに含まれる第1の画像フレームおよび第2の画像フレームのうち、前記第1の画像フレームにおける対象物の推定存在確率分布に基づき、前記第2の画像フレームにおける対象物の候補輪郭を定めるステップと、
前記第2の画像フレームのエッジ画像を生成してメモリに格納するステップと、
前記メモリに格納したエッジ画像の一部の領域の画像データを読み出し、探索することにより、前記候補輪郭の曲線を構成するノットから最近傍にあるエッジを検出する処理を、前記ノットごとに並列に実行するステップと、
エッジ検出の結果を統合して前記候補輪郭ごとに尤度を求め、前記第2の画像フレームにおける対象物の存在確率分布を推定するステップと、
を含むことを特徴とする対象物追跡方法。 - 追跡したい対象物を撮影した動画像データを構成する画像ストリームに含まれる第1の画像フレームおよび第2の画像フレームのうち、前記第1の画像フレームにおける対象物の推定存在確率分布に基づき、前記第2の画像フレームにおける対象物の候補輪郭を定める機能と、
前記第2の画像フレームのエッジ画像を生成してメモリに格納する機能と、
前記メモリに格納したエッジ画像の一部の領域の画像データを読み出し、探索することにより、前記候補輪郭の曲線を構成するノットから最近傍にあるエッジを検出する処理を、前記ノットごとに並列に実行する機能と、
エッジ検出の結果を統合して前記候補輪郭ごとに尤度を求め、前記第2の画像フレームにおける対象物の存在確率分布を推定する機能と、
をコンピュータに実現させることを特徴とするコンピュータプログラム。 - 追跡したい対象物を撮影した動画像データを構成する画像ストリームに含まれる第1の画像フレームおよび第2の画像フレームのうち、前記第1の画像フレームにおける対象物の推定存在確率分布に基づき、前記第2の画像フレームにおける対象物の候補輪郭を定める機能と、
前記第2の画像フレームのエッジ画像を生成してメモリに格納する機能と、
前記メモリに格納したエッジ画像の一部の領域の画像データを読み出し、探索することにより、前記候補輪郭の曲線を構成するノットから最近傍にあるエッジを検出する処理を、前記ノットごとに並列に実行する機能と、
エッジ検出の結果を統合して前記候補輪郭ごとに尤度を求め、前記第2の画像フレームにおける対象物の存在確率分布を推定する機能と、
をコンピュータに実現させることを特徴とするコンピュータプログラムを記録した、コンピュータ読み取り可能な記録媒体。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP08873286.2A EP2265023B1 (en) | 2008-03-14 | 2008-12-26 | Subject tracking device and subject tracking method |
| US12/919,793 US8233661B2 (en) | 2008-03-14 | 2008-12-26 | Object tracking apparatus and object tracking method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008065198A JP5213486B2 (ja) | 2008-03-14 | 2008-03-14 | 対象物追跡装置および対象物追跡方法 |
| JP2008-065198 | 2008-03-14 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2009113144A1 true WO2009113144A1 (ja) | 2009-09-17 |
Family
ID=41064827
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2008/004015 WO2009113144A1 (ja) | 2008-03-14 | 2008-12-26 | 対象物追跡装置および対象物追跡方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8233661B2 (ja) |
| EP (1) | EP2265023B1 (ja) |
| JP (1) | JP5213486B2 (ja) |
| WO (1) | WO2009113144A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105551063A (zh) * | 2016-01-29 | 2016-05-04 | 中国农业大学 | 一种用于跟踪视频中运动目标的方法以及装置 |
| CN112037254A (zh) * | 2020-08-11 | 2020-12-04 | 浙江大华技术股份有限公司 | 目标跟踪方法及相关装置 |
| CN114219832A (zh) * | 2021-11-29 | 2022-03-22 | 浙江大华技术股份有限公司 | 人脸跟踪方法、装置及计算机可读存储介质 |
Families Citing this family (38)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011040993A (ja) * | 2009-08-11 | 2011-02-24 | Nikon Corp | 被写体追尾プログラム、およびカメラ |
| JP5528151B2 (ja) * | 2010-02-19 | 2014-06-25 | パナソニック株式会社 | 対象物追跡装置、対象物追跡方法、および対象物追跡プログラム |
| US8503539B2 (en) | 2010-02-26 | 2013-08-06 | Bao Tran | High definition personal computer (PC) cam |
| CN102236899B (zh) * | 2010-05-07 | 2013-12-04 | 株式会社理光 | 物体检测方法和装置 |
| JP5762730B2 (ja) * | 2010-12-09 | 2015-08-12 | パナソニック株式会社 | 人検出装置および人検出方法 |
| KR101733116B1 (ko) * | 2010-12-10 | 2017-05-08 | 한국전자통신연구원 | 고속 스테레오 카메라를 이용한 구형 물체의 비행 정보 측정 시스템 및 방법 |
| JP4784709B1 (ja) * | 2011-03-10 | 2011-10-05 | オムロン株式会社 | 対象物追跡装置、対象物追跡方法、および制御プログラム |
| KR102026651B1 (ko) * | 2012-04-25 | 2019-09-30 | 삼성전자주식회사 | 입자 필터 프레임 워크를 이용한 강건한 객체 추적 방법 및 시스템 |
| US10009579B2 (en) | 2012-11-21 | 2018-06-26 | Pelco, Inc. | Method and system for counting people using depth sensor |
| US9367733B2 (en) * | 2012-11-21 | 2016-06-14 | Pelco, Inc. | Method and apparatus for detecting people by a surveillance system |
| US9639747B2 (en) | 2013-03-15 | 2017-05-02 | Pelco, Inc. | Online learning method for people detection and counting for retail stores |
| JP6295122B2 (ja) * | 2014-03-27 | 2018-03-14 | 株式会社メガチップス | 状態推定装置、プログラムおよび集積回路 |
| US9779307B2 (en) | 2014-07-07 | 2017-10-03 | Google Inc. | Method and system for non-causal zone search in video monitoring |
| US9449229B1 (en) | 2014-07-07 | 2016-09-20 | Google Inc. | Systems and methods for categorizing motion event candidates |
| US9158974B1 (en) | 2014-07-07 | 2015-10-13 | Google Inc. | Method and system for motion vector-based video monitoring and event categorization |
| US10127783B2 (en) | 2014-07-07 | 2018-11-13 | Google Llc | Method and device for processing motion events |
| US10140827B2 (en) | 2014-07-07 | 2018-11-27 | Google Llc | Method and system for processing motion event notifications |
| US9501915B1 (en) | 2014-07-07 | 2016-11-22 | Google Inc. | Systems and methods for analyzing a video stream |
| USD782495S1 (en) | 2014-10-07 | 2017-03-28 | Google Inc. | Display screen or portion thereof with graphical user interface |
| US10133927B2 (en) * | 2014-11-14 | 2018-11-20 | Sony Corporation | Method and system for processing video content |
| US9715622B2 (en) * | 2014-12-30 | 2017-07-25 | Cognizant Technology Solutions India Pvt. Ltd. | System and method for predicting neurological disorders |
| KR101635973B1 (ko) * | 2015-04-23 | 2016-07-04 | 국방과학연구소 | Ir 영상 추적에서 파티클 필터를 이용한 기억 추적 성능 향상 방법 및 장치 |
| US9361011B1 (en) | 2015-06-14 | 2016-06-07 | Google Inc. | Methods and systems for presenting multiple live video feeds in a user interface |
| US9449254B1 (en) * | 2015-08-04 | 2016-09-20 | Adobe Systems Incorporated | Adaptive environment targeting |
| US10506237B1 (en) | 2016-05-27 | 2019-12-10 | Google Llc | Methods and devices for dynamic adaptation of encoding bitrate for video streaming |
| US10380429B2 (en) | 2016-07-11 | 2019-08-13 | Google Llc | Methods and systems for person detection in a video feed |
| US10346715B2 (en) * | 2017-04-07 | 2019-07-09 | GM Global Technology Operations LLC | Camera misalignment determination methods and systems |
| US11783010B2 (en) | 2017-05-30 | 2023-10-10 | Google Llc | Systems and methods of person recognition in video streams |
| CN107426497A (zh) * | 2017-06-15 | 2017-12-01 | 深圳天珑无线科技有限公司 | 一种记录影像的方法、装置及计算机可读存储介质 |
| US10664688B2 (en) | 2017-09-20 | 2020-05-26 | Google Llc | Systems and methods of detecting and responding to a visitor to a smart home environment |
| JP6412998B1 (ja) * | 2017-09-29 | 2018-10-24 | 株式会社Qoncept | 動体追跡装置、動体追跡方法、動体追跡プログラム |
| CN109819178B (zh) * | 2017-11-21 | 2022-07-08 | 虹软科技股份有限公司 | 一种用于帧处理的方法和装置 |
| US11494922B2 (en) * | 2018-03-23 | 2022-11-08 | Nec Corporation | Object tracking device, object tracking method, and object tracking program |
| WO2020141565A1 (en) * | 2018-12-31 | 2020-07-09 | I-Deal S.R.L. | Anthropometric data portable acquisition device and method of collecting anthropometric data |
| CN111107319B (zh) * | 2019-12-25 | 2021-05-28 | 眸芯科技(上海)有限公司 | 基于区域摄像头的目标追踪方法、装置及系统 |
| CN111402288A (zh) * | 2020-03-26 | 2020-07-10 | 杭州博雅鸿图视频技术有限公司 | 目标检测跟踪方法及装置 |
| CN114313883B (zh) * | 2022-02-08 | 2024-03-12 | 深圳市铁越电气有限公司 | 基于图像处理技术的皮带跑偏自动检测方法及系统 |
| CN116469041B (zh) * | 2023-06-20 | 2023-09-19 | 成都理工大学工程技术学院 | 一种目标对象的运动轨迹预测方法、系统及设备 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05216988A (ja) * | 1992-02-04 | 1993-08-27 | Hitachi Ltd | テンプレート演算処理方法および装置 |
| JPH11167455A (ja) * | 1997-12-05 | 1999-06-22 | Fujitsu Ltd | 手形状認識装置及び単色物体形状認識装置 |
| JP2007328746A (ja) * | 2006-06-09 | 2007-12-20 | Sony Computer Entertainment Inc | 対象物追跡装置および対象物追跡方法 |
| JP2007328747A (ja) * | 2006-06-09 | 2007-12-20 | Sony Computer Entertainment Inc | 特徴点探索装置、画像解析装置、および最近傍特徴点検出方法 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3288086B2 (ja) * | 1992-10-26 | 2002-06-04 | 株式会社東芝 | 動物体抽出装置 |
| JP2006268097A (ja) * | 2005-03-22 | 2006-10-05 | Nissan Motor Co Ltd | 車載物体検出装置、および物体検出方法 |
| FR2885719B1 (fr) * | 2005-05-10 | 2007-12-07 | Thomson Licensing Sa | Procede et dispositif de suivi d'objets dans une sequence d'images |
-
2008
- 2008-03-14 JP JP2008065198A patent/JP5213486B2/ja active Active
- 2008-12-26 US US12/919,793 patent/US8233661B2/en active Active
- 2008-12-26 EP EP08873286.2A patent/EP2265023B1/en active Active
- 2008-12-26 WO PCT/JP2008/004015 patent/WO2009113144A1/ja active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05216988A (ja) * | 1992-02-04 | 1993-08-27 | Hitachi Ltd | テンプレート演算処理方法および装置 |
| JPH11167455A (ja) * | 1997-12-05 | 1999-06-22 | Fujitsu Ltd | 手形状認識装置及び単色物体形状認識装置 |
| JP2007328746A (ja) * | 2006-06-09 | 2007-12-20 | Sony Computer Entertainment Inc | 対象物追跡装置および対象物追跡方法 |
| JP2007328747A (ja) * | 2006-06-09 | 2007-12-20 | Sony Computer Entertainment Inc | 特徴点探索装置、画像解析装置、および最近傍特徴点検出方法 |
Non-Patent Citations (3)
| Title |
|---|
| MICHAEL ISARD; ANDREW BLAKE: "CONDENSATION - conditional density propagation for visual tracking", INT. J. COMPUTER VISION, vol. 29, no. 1, 1998, pages 5 - 28, XP002329561, DOI: doi:10.1023/A:1008078328650 |
| MICHAEL ISARD; ANDREW BLAKE: "Contour tracking by stochastic propagation of conditional density", PROC. EUROPEAN CONF. ON COMPUTER VISION, vol. 1, 1996, pages 343 - 356, XP019190190 |
| MICHAEL ISARD; ANDREW BLAKE: "ICondensation: Unifying low-level and high-level tracking in a stochastic framework", PROC 5TH EUROPEAN CONF. COMPUTER VISION, 1998 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105551063A (zh) * | 2016-01-29 | 2016-05-04 | 中国农业大学 | 一种用于跟踪视频中运动目标的方法以及装置 |
| CN105551063B (zh) * | 2016-01-29 | 2018-04-17 | 中国农业大学 | 一种用于跟踪视频中运动目标的方法以及装置 |
| CN112037254A (zh) * | 2020-08-11 | 2020-12-04 | 浙江大华技术股份有限公司 | 目标跟踪方法及相关装置 |
| CN114219832A (zh) * | 2021-11-29 | 2022-03-22 | 浙江大华技术股份有限公司 | 人脸跟踪方法、装置及计算机可读存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| US8233661B2 (en) | 2012-07-31 |
| JP5213486B2 (ja) | 2013-06-19 |
| EP2265023B1 (en) | 2019-05-29 |
| JP2009224924A (ja) | 2009-10-01 |
| US20110058708A1 (en) | 2011-03-10 |
| EP2265023A1 (en) | 2010-12-22 |
| EP2265023A4 (en) | 2016-05-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5213486B2 (ja) | 対象物追跡装置および対象物追跡方法 | |
| JP4756660B2 (ja) | 画像処理装置および画像処理方法 | |
| JP6030617B2 (ja) | 画像処理装置および画像処理方法 | |
| JP5520463B2 (ja) | 画像処理装置、対象物追跡装置および画像処理方法 | |
| JP4766495B2 (ja) | 対象物追跡装置および対象物追跡方法 | |
| US6658136B1 (en) | System and process for locating and tracking a person or object in a scene using a series of range images | |
| EP1969559B1 (en) | Contour finding in segmentation of video sequences | |
| WO2010073432A1 (ja) | 画像処理装置および画像処理方法 | |
| JP4597391B2 (ja) | 顔領域検出装置およびその方法並びにコンピュータ読み取り可能な記録媒体 | |
| EP1969561A1 (en) | Segmentation of video sequences | |
| WO2019071976A1 (zh) | 基于区域增长和眼动模型的全景图像显著性检测方法 | |
| JP2010152556A (ja) | 画像処理装置および画像処理方法 | |
| Langmann et al. | Multi-modal background subtraction using gaussian mixture models | |
| Rao et al. | Object tracking system using approximate median filter, Kalman filter and dynamic template matching | |
| KR20170015299A (ko) | 배경 추적을 통한 오브젝트 추적 및 분할을 위한 방법 및 장치 | |
| JP2010057105A (ja) | オブジェクトの3次元追跡方法およびシステム | |
| JP5468773B2 (ja) | 画像処理装置および画像処理方法 | |
| JP4449483B2 (ja) | 画像解析装置、および画像解析方法、並びにコンピュータ・プログラム | |
| JP2016081252A (ja) | 画像処理装置および画像処理方法 | |
| EP3956864A1 (en) | Augmented reality implementation method | |
| JP2009003615A (ja) | 注目領域抽出方法、注目領域抽出装置、コンピュータプログラム、及び、記録媒体 | |
| Rashi et al. | Analysis of different image processing strategies | |
| Cinque et al. | Real-time foreground segmentation with Kinect sensor | |
| JP7341712B2 (ja) | 画像処理装置、画像処理方法、撮像装置、およびプログラム | |
| JP2005071125A (ja) | 被写体検出装置、被写体検出方法、被写体データ選定プログラムおよび被写体位置検出プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 08873286 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2008873286 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 12919793 Country of ref document: US |