RU2654611C2 - Автоматическое позиционирование стандартных плоскостей для оценки сердца плода в режиме реального времени - Google Patents
Автоматическое позиционирование стандартных плоскостей для оценки сердца плода в режиме реального времени Download PDFInfo
- Publication number
- RU2654611C2 RU2654611C2 RU2015124063A RU2015124063A RU2654611C2 RU 2654611 C2 RU2654611 C2 RU 2654611C2 RU 2015124063 A RU2015124063 A RU 2015124063A RU 2015124063 A RU2015124063 A RU 2015124063A RU 2654611 C2 RU2654611 C2 RU 2654611C2
- Authority
- RU
- Russia
- Prior art keywords
- image
- plane
- data
- planes
- real time
- Prior art date
Links
Images





Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/54—Control of the diagnostic device
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three dimensional [3D] modelling, e.g. data description of 3D objects
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0866—Detecting organic movements or changes, e.g. tumours, cysts, swellings involving foetal diagnosis; pre-natal or peri-natal diagnosis of the baby
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/13—Tomography
- A61B8/14—Echo-tomography
- A61B8/145—Echo-tomography characterised by scanning multiple planes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/483—Diagnostic techniques involving the acquisition of a 3D volume of data
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T15/00—3D [Three Dimensional] image rendering
- G06T15/08—Volume rendering
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T19/00—Manipulating 3D models or images for computer graphics
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/30—Determination of transform parameters for the alignment of images, i.e. image registration
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C2270/00—Control; Monitoring or safety arrangements
- F04C2270/04—Force
- F04C2270/042—Force radial
- F04C2270/0421—Controlled or regulated
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10132—Ultrasound image
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
- G06T2207/30048—Heart; Cardiac
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2210/00—Indexing scheme for image generation or computer graphics
- G06T2210/41—Medical
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2219/00—Indexing scheme for manipulating 3D models or images for computer graphics
- G06T2219/028—Multiple view windows (top-side-front-sagittal-orthogonal)
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Radiology & Medical Imaging (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- Veterinary Medicine (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Computer Graphics (AREA)
- Software Systems (AREA)
- Computer Hardware Design (AREA)
- General Engineering & Computer Science (AREA)
- Gynecology & Obstetrics (AREA)
- Pregnancy & Childbirth (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Geometry (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
Группа изобретений относится к медицинской технике, а именно к медицинским системам ультразвуковой диагностики. Система ультразвуковой диагностики содержит матричный зонд, выполненный с возможностью сканирования в режиме реального времени множества плоскостей изображения в области тела, контроллер для управления сканированием посредством матричного зонда, процессор изображений, соединенный с матричный зондом, дисплей, соединенный с процессором изображений, данные, представляющие анатомическую модель анатомического объекта, процессор совмещения изображений, при этом контроллер сконфигурирован для побуждения матричного зонда сканировать в режиме реального времени плоскость изображения, соответствующую данным ориентации плоскости изображения. Способ ультразвуковой визуализации содержит выбор множества отличных друг от друга плоскостей изображения анатомического объекта, причем первая плоскость изображения является одной из выбранных плоскостей изображения, позиционирование матричного зонда в акустическом окне для целевого анатомического объекта, получение 2D-изображения первой плоскости анатомического объекта, совмещение 2D-изображения с данными анатомической модели целевого анатомического объекта, идентификацию данных ориентации второй плоскости изображения целевого анатомического объекта в ответ на совмещение 2D-изображения первой плоскости, при этом координаты плоскости второй плоскости изображения находятся из данных анатомической модели, управление посредством контроллера формы луча матричным зондом для сканирования первой плоскости и второй плоскости изображения в режиме реального времени в ответ на данные об ориентации, причем данные об ориентации соединяют в стробирующий сигнал для контроллера формы луча, и одновременное отображение ультразвуковых изображений первой плоскости и второй плоскости изображения в режиме реального времени. В способе ультразвуковой визуализации по второму варианту выполнения способа получают объем данных объемного изображения целевого анатомического объекта, совмещают одну плоскость из набора данных с данными анатомической модели и идентифицируют данные об ориентации множества выбранных плоскостей изображения в ответ на совмещение одной плоскости изображения из набора данных объемного изображения. Использование группы изобретений позволяет получить стандартные срезы целевой анатомии в режиме реального времени. 3 н. и 12 з.п. ф-лы, 6 ил.
Description
Данное изобретение относится к медицинским системам ультразвуковой диагностики, в частности к ультразвуковым системам, которые могут выполнять диагностику сердца плода посредством визуализации в режиме реального времени плоскостей изображения, полезных с точки зрения диагностики.
Ультразвуковая визуализация обычно используется во время беременности для того, чтобы оценить развитие плода в утробе матери. Ультразвуковой скрининг сердца плода предназначен для обнаружения структурных аномалий (как правило, врожденных пороков сердца или ИБС) и включает в себя анализ стандартных двумерных (2D) срезов изображения сердца плода. Типичные стандартные срезы включают в себя четырехкамерный срез и срезы, которые позволяют оценить выводные тракты левого желудочка (ЛЖ) и правого желудочка (ПЖ). Другие срезы, которые могут потребоваться, включают в себя пятикамерный срез, срез через три главных сосуда и срез через трахею. На практике эти срезы, как правило, выявляют большинство форм ИБС. Традиционный путь врача для того, чтобы получить изображения каждого требуемого среза, состоит в манипулировании ультразвуковым зондом, находящимся в акустическом контакте с животом, до тех пор, пока требуемая анатомическая ориентация не окажется в плоскости изображения зонда для 2D визуализации. Например, врач сначала манипулирует зондом до тех пор, пока сердца плода не будет видно на четырехкамерном срезе. Врач затем сохраняет изображение этого среза или последовательность изображений для одного или нескольких ударов сердца. Сохранение изображений заканчивается, и врач манипулирует зондом снова, на этот раз пытаясь выровнять плоскость изображения со срезом выводного тракта ЛЖ. Когда врач успешно выровнял плоскость изображения с этим срезом, сохраняются еще одно изображение или последовательность изображений. Процесс манипулирования зондом и сохранение повторяется для среза через три главных сосуда и других срезов по мере необходимости. При этой процедуре может быть пропущено значительное число случаев патологических изменений, потому что получение и анализ этих срезов требует высокой квалификации: эхокардиография плода очень зависит от оператора. Кроме того, плод может двигаться во время процедуры, что требует от врача переориентироваться относительно сердца плода каждый раз, когда плод движется.
Теперь, с внедрением получения трехмерного (3D) ультразвукового изображения (а именно, протокола пространственно-временной корреляции изображений или STIC), стало возможно захватить весь объем сердца плода и прилегающие к нему сосуды и выполнить компьютерную реконструкцию из 2D срезов любой ориентации в сердце, в том числе стандартных, даже после того, как пациент будет отпущен. Процедура STIC проводится путем выполнения медленного непрестанного перемещения плоскости 2D изображения по сердцу плода, которая может занять 10 секунд или более. Цель состоит в получении изображения каждой прилегающей анатомической плоскости сердца плода в каждой фазе сердечного цикла плода. Это делается путем сбора большого количества изображений по большому количеству сердечных циклов по мере того, как плоскость изображения перемещается по сердцу. Затем используется управляемая пользователем обработка изображения для извлечения преобладающего временного цикла всего сердца плода из собранных 2D кадров. Эта информация затем используется для повторной сборки кадров в серии объемных изображений, каждая в другой фазе сердечного цикла. Стандартные 2D срезы затем извлекаются пользователем из этих объемов с помощью процесса, известного как многопланарная реконструкция (MPR). Врач должен выполнять поиск в объемах при разных ориентациях плоскости, ища каждый стандартный срез. Некоторые срезы могут быть искажены или анатомически неправильны, что зависит от скорости и равномерности перемещения плоскости изображения. Качество и корректность STIC-объемов может значительно варьироваться от одного исследования к другому. Кроме того, STIC изображения не являются изображениями в реальном времени, а синтезированными ретроспективными реконструкциями анатомических срезов, сконструированных из нескольких различных сердечных циклов. Несмотря на трудности и ограничения процедуры STIC, сейчас является сложившейся практикой то, что исследования 3D сердца плода могут потенциально уменьшить процент ошибочных диагнозов и совершенствовать рабочий процесс и зависимость от оператора (более низкой квалификации), что обусловлено тем, что 3D рабочий процесс является интуитивно понятным и для изучения данных объемных изображений предоставляются адекватные средства (например, MPR).
Можно предполагать, что ультразвуковая 3D визуализация в реальном времени может использоваться для получения прямой передачи объемных изображений сердца плода. К сожалению, в большинстве случаев нынешние частоты объемных кадров недостаточно высоки для того, чтобы обеспечить как достаточное пространственное разрешение, так и разрешение по времени (объемную частоту) для того, чтобы сделать осуществимой на практике прямую передачу 3D визуализации для визуализации сердца плода. Кроме того, так как требуются только определенные плоскости 2D изображения для диагностики сердца плода, большая часть 3D информации не используется. Если бы можно было получить только необходимые плоскости, в принципе, их можно было бы получать при значительно более высоких частотах кадров с гораздо более высоким разрешением. Таким образом, существует необходимость в том, чтобы иметь возможность получать, с хорошим пространственным и временным разрешением, ультразвуковые данные, которые предоставляют при этом необходимые 2D стандартные срезы в режиме реального времени.
В статье «Automatic Alignment of Standard Views in 3D Echocardiograms Using Real-Time racking», Oderus, H. Torp, S.I. Rabbe, Proceedings of PIE, vol. 7265, 26 февраля 2009, страницы 7265QD-1-72650D-7, XPQ4Q495310, раскрывается автоматизированный подход для выравнивания стандартных апикальных срезов и срезов по короткой оси и их коррекции для внеплоскостного движения в 3D эхокардиографии. Способ дает возможность работать в режиме реального времени, потенциально во время получения изображения.
В соответствии с принципами настоящего изобретения описываются система ультразвуковой диагностики и способ, который делает возможным получение нескольких стандартных срезов целевой анатомии, такой как сердце плода, в режиме реального времени. Матричный зонд находится в контакте с подходящим акустическим окном на теле матери для того, чтобы видеть сердца плода. Матричный зонд может сканировать выбираемые по-разному ориентированные плоскости изображения в быстрой последовательности, что делает возможной визуализацию выбранных плоскостей изображения в режиме реального времени. Сначала зондом манипулируют, визуализируя при этом одну плоскость в режиме реального времени до тех пор, пока не будет получена первая опорная плоскость, такая как четырехкамерный срез. Затем используется модель целевой анатомии, такая как модель сердца, с тем, чтобы сопоставить ультразвуковое изображение четырехкамерного среза с соответствующим четырехкамерным срезом в модели сердца. Из относительной ориентации требуемых плоскостей в модели, модель сердца предоставляет информацию об относительных ориентациях других стандартных срезов относительно полученной опорной плоскости. Эта информация используется для управления матричным зондом для того, чтобы дополнительно сканировать плоскости изображения одного или более других срезов в режиме реального времени. Затем пользователь может отобразить опорный стандартный срез и одновременно один или более других требуемых срезов в режиме реального времени.
НА ЧЕРТЕЖАХ:
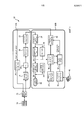
На Фиг. 1 в виде блок-схемы показана ультразвуковая система, выполненная в соответствии с принципами настоящего изобретения.
На Фиг. 2 показан один способ получения изображения плода и отображения в соответствии с настоящим изобретением.
На Фиг. 3 показан второй способ получения изображения плода и отображения в соответствии с настоящим изобретением.
На Фиг. 4 показан третий способ получения изображения плода и отображения в соответствии с настоящим изобретением.
На Фиг. 5 показаны три стандартных среза сердца плода совместно с их соответствующими плоскостями модели сердца плода.
На Фиг. 6 показан дисплей ультразвуковой системы с тремя срезами стандартных плоскостей изображения сердца плода в режиме реального времени, полученных в соответствии с принципами настоящего изобретения.
Обратимся сначала к Фиг. 1, ультразвуковая система 10, сконструированная в соответствии с принципами настоящего изобретения, представлена в виде блок-схемы. Ультразвуковая система скомпонована из двух подсистем - подсистемы 10A сбора с предварительной обработкой и подсистемы 10B отображения. Ультразвуковой зонд соединен с подсистемой сбора, которая включает в себя двумерный матричный преобразователь 70 и микроформирователь 72 луча. Микроформирователь луча содержит схемы, которые управляют сигналами, применяемыми к группе элементов («излучатели») матричного преобразователя 70 и делает начальную обработку эхосигналов, принятых элементами каждой группы. Микроформирователь луча в зонде предпочтительно уменьшает количество проводов в кабеле между зондом и ультразвуковой системой и описывается в патенте США 5997479 (автор Savord и др.) и в патенте США 6436048 (автор Pesque).
Зонд связан с подсистемой 10A сбора ультразвуковой системы. Подсистема сбора включает в себя контроллер 74 формы луча, который способен реагировать на стробирующий сигнал, как описано ниже, и подает сигналы управления на микроформирователь 72 луча, дающие инструкции зонду относительно синхронизации, частоты, направления и фокусировки переданных лучей на плоскости 2D изображения или в 3D объемах. Контроллер формы луча также управляет формированием лучей эхосигналов, принятых подсистемой сбора, с помощью управления аналого-цифровыми (А/Ц) преобразователями 18 и формирователем 20 луча. Частично сформированные лучи эхо-сигналов, принятые зондом, усиливаются схемой 16 предусилителя и ДРУ (дифференциальная регулировка усиления) в подсистеме сбора, затем оцифровываются А/Ц преобразователями 18. Оцифрованные эхо-сигналы затем формируются в полностью управляемые и сфокусированные лучи формирователем 20 луча. Эхо-сигналы затем обрабатываются процессором 22 изображений, который осуществляет цифровую фильтрацию, обнаружение в B-режиме и доплеровскую обработку, а также может выполнять другие обработки сигнала, такие как разделение гармоник, понижение уровня спеклов и другие требуемые обработки сигнала изображения.
Эхо-сигналы, производимые подсистемой 10A сбора, связываются с подсистемой 10B отображения, которая обрабатывает эхо-сигналы для отображения в нужном формате изображения. Эхо-сигналы обрабатываются процессором 24 строки изображения, который выполнен с возможностью провести дискретизацию по времени эхо-сигналов, сопряжение сегментов лучей в полные линейные сигналы и усреднение линейных сигналов для улучшения отношения сигнал-шум или установки уровня усреднения потока. Строки изображения для двумерного изображения сканирования преобразуются в нужный формат изображения посредством сканирующего преобразователя 26, который выполняет преобразование полярных координат, как известно в данной области техники. Затем изображение сохраняется в памяти 28 для хранения изображений, из которой оно может быть отображено на устройстве 38 отображения. Изображение в памяти также совмещается с графиками, которые должны отображаться с изображением, которые генерируются генератором 34 графических изображений. Отдельные изображения или последовательности изображений могут быть сохранены в кино-памяти 30 в течение фиксации циклов изображений или последовательностей.
В некоторых реализациях может быть желательно получение изображения на отдельных фазах сердечного цикла плода. Генератор 54 частоты сердечных сокращений плода обеспечивает эту возможность. Генератор частоты сердечных сокращений плода синтезирует периодичность сердечного цикла плода, как описано в международных патентных публикациях WO 2011/001309 (Jago и др.) и WO 2011/158136 (Schauf). Генератор частоты сердечных сокращений плода производит стробирующий сигнал на выбранной фазе сердца плода, которую можно использовать для стробирования сбора изображений или обработки, как описано ниже.
В соответствии с принципами настоящего изобретения подсистема отображения включает в себя данные 32 модели сердца для сердца плода. Данными модели сердца являются данные 3D анатомической сеточной модели сердца плода, как описано в патенте США №2008/0304744 (Peters и др.) и в предварительной заявке США №61/569450, поданной 12 декабря 2011 (Radulescu и др.). Такая модель представляет собой структуру сердца, включающую в себя его внутреннее пространство и наружную структуру, такую как кровеносные сосуды и клапаны. Модель сердца может быть моделью одной фазы сердца, такой как конечная диастола, или она может включать в себя несколько моделей сердца при разных фазах сердечного цикла. Для настоящего изобретения важно, что отдельные плоскости могут быть извлечены из данных модели сердца и сопоставлены или совмещены с фактическими ультразвуковыми 2D-изображениями плода. Это совмещение выполняется процессором 36 совмещения изображений, который принимает ультразвуковые изображения сердца плода, производимые сканирующим преобразователем 26, и совмещает их с соответствующей плоскостью данных модели сердца. Сопоставление с плоскостью модели сердца запускает формирование данных 44 об ориентации плоскости изображения, которые, в свою очередь, объединяют координаты плоскости изображения или данные об ориентации в стробирующий сигнал контроллеру 74 формы луча, который в ответ направляет матричный зонд для того, чтобы сканировать идентифицированную плоскость изображения. Информация о координатах плоскости для ориентации плоскости изображения предоставляется из данных модели сердца. Данные 32 модели сердца доступны для выбранных плоскостей 42 изображения, которые выбираются из панели 40 управления пользователя. Генератор 54 сигналов режима синхронизации с ЭКГ соединен с процессором 36 совмещения изображений.
Один из способов использования ультразвуковой системы, показанной на Фиг. 1, для получения стандартных изображений для исследования сердца плода показан на Фиг. 2. На этапе 202 пользователь выбирает стандартные срезы, которые желательны для этого конкретного исследования сердца плода. Как указано выше, типичные стандартные срезы включают в себя четырехкамерный срез, выводные тракты ЛЖ, выводные тракты ПЖ, пятикамерный срез, срез через три главных сосуда и срез трахеи. Пользователь может выбрать эти стандартные срезы из списка стандартных срезов, доступных из выпадающего списка на дисплее системы. Пользователь выбирает требуемые срезы с помощью управления панели 40 управления, и плоскости изображения выбранных срезов сохраняются в 42, где они используются для выбора срезов из плоскостей из данных 32 модели сердца. На этапе 204 пользователь прижимает апертуру матричного зонда напротив живота пациента и манипулирует зондом до тех пор, пока не найдет подходящее акустическое окно, из которого пользователь может сформировать изображение сердца плода. На этапе 206 пользователь манипулирует матричным зондом, который в это время сканирует только одну плоскость 2D изображения до тех пор, пока плоскость изображения не пересечет сердце плода и не получит изображение первого выбранного среза сердца. Как правило, этот первый стандартный срез будет четырехкамерным срезом сердца плода. Этот первый стандартный срез соединяется с процессором 36 совмещения изображений, который на этапе 208 совмещает ультразвуковое изображение с плоскостью модели сердца. Совмещение ультразвукового изображения с моделью сердца описано в вышеуказанной публикации Peters и др. и заявке Radulescu и др. и наглядно иллюстрируется в положении a) на Фиг. 5.С левой стороны положения a) находится четырехкамерное ультразвуковое изображение 502 сердца плода, и с правой стороны положения a) находится четырехкамерная плоскость 504 3D-модели сердца плода. Плоскость 504 модели сердца ориентирована по отношению к поперечному сечению нисходящей аорты 122' в нижней части в соответствии с ее расположением в 122 на ультразвуковом изображении 502. Камеры сердца на ультразвуковом изображении были помечены (RA, LA, RV, LV), и их соответствие с камерами на плоскости 504 модели сердца является очевидным. Таким образом, процессор совмещения изображений определяет плоскость модели сердца, которая наиболее близко соответствует анатомии четырехкамерного среза 502, используя инструменты, такие как блочное сравнение пикселей ультразвукового изображения в разных плоскостях через данные модели сердца. Стрелка на плоскости 504 модели сердца и на других показанных плоскостях модели сердца указывает анатомические ориентиры на плоскостях модели сердца, которые можно легче всего найти и сопоставить с ультразвуковыми изображениями, ускоряя процесс совмещения. На Фиг. 5 также показано сопоставление других стандартных срезов в модели сердца. Положение b) иллюстрирует изображение 506 выводного тракта ЛЖ в соответствии с выводным трактом ЛЖ плоскости 508 модели сердца плода, и положение с) иллюстрирует изображение 510 среза протоковой дуги в соответствии с протоковой дугой плоскости 512 модели сердца. Как видно, изображение 510 протоковой дуги перевернуто по отношению к плоскости 512 модели сердца. Это может быть решено путем переворачивания ультразвукового изображения, как описано в патентах США 6669641 (Poland и др.), или путем обращения на противоположные данные модели сердца в процессе совмещения, как описано в вышеуказанных публикации Peters и др. и заявке Radulescu и др.
После того как была найдена плоскость модели сердца, которая лучше всего соответствует анатомии первого стандартного среза ультразвукового изображения, ориентации других выбранных стандартных срезов могут быть легко идентифицированы с помощью модели сердца. Когда первая плоскость стандартного среза будет идентифицирована в модели сердца, из модели сердца станут известны относительные ориентации других плоскостей стандартного среза на основании априорных статистических данных о нормальных геометрических соотношениях структур внутри сердца плода. Например, когда конкретная плоскость модели сердца идентифицируется как четырехкамерный срез, следующий стандартный срез может находиться, например, в плоскости, повернутой на 35° и наклоненной на 15° по отношению к плоскости четырехкамерного среза в модели. Координаты этой повернутой и наклоненной плоскости связаны с данными 44 об ориентации плоскости изображения и используются для управления матричным зондом для сканирования второй плоскости изображения в этой конкретной ориентации по отношению к первой плоскости стандартного среза. Аналогично, координаты плоскости других выбранных стандартных плоскостей находятся в данных модели сердца, связанных с данными об ориентации плоскости изображения, и используются для стробирования сканирования дополнительных плоскостей изображения во всех выбранных плоскостях стандартного среза, как указано на этапе 210. На этапе 212 выбранные стандартные срезы отображаются на ультразвуковом дисплее 38 в режиме реального времени. На Фиг. 6 показан экран дисплея ультразвуковой системы, на котором в режиме реального времени отображаются три таких стандартных среза. В левом верхнем квадранте экрана показан четырехкамерный срез 602 прямой передачи, в правом верхнем квадранте показан срез 610 протоковой дуги в прямой передаче, и в левом нижнем квадранте показан срез 606 прямой передачи выводного тракта ЛЖ. Три среза могут одновременно отображаться в режиме реального времени, потому что только три плоскости изображения должны быть отсканированы в сменяющем друг друга следовании, а не весь 3D объем, из которого должны быть определены и извлечены MPR кадры. Когда в качестве исходного стандартного среза используется четырехкамерный срез 602, другие стандартные срезы будут, как правило, находиться в плоскостях, которые также пересекают апертуру преобразователя, позволяя всем стандартным срезам отображаться как изображения в B-режиме. Это наиболее желательно, так как изображение в C-режиме потребует фактически того же времени сканирования, как полного объема, и преимущество сканирования с высокой частотой кадров только нескольких плоскостей будет утрачено. Реализация Фиг. 6 содержит графическую иконку 610 типичного сердца 612 плода, который показывает пользователю, как плоскости 614 изображений пересекают сердце. Контур графического изображения 612 сердца плода может быть предоставлен моделью 32 сердца плода. Каждое изображение на Фиг. 6 очерчено прямоугольником. Когда пользователь выбирает манипулятором типа «мышь» изображение, его прямоугольник подсвечивается, указывая, что графическое изображение 614 плоскости показывает ориентацию этого изображения по отношению к сердцу. Альтернативно, каждый прямоугольник может быть очерчен разными цветами, и несколько графических изображений 614 плоскостей такого же цвета могут отображаться на графическом изображении одновременно. Другая возможность, предоставляемая дисплеем, состоит в построении трех плоскостей в трех измерениях, изображающих относительную ориентацию всех трех изображений в режиме реального времени. Изображения в режиме реального времени также могут быть перекрыты посредством подвижных курсоров 13, 14 и 15 (смотри Фиг. 5), которые могут быть передвинуты пользователем, и выбираемых манипулятором типа «мышь» элементов 12 управления настройками изображения для показа плоскостей изображения, ортогональных плоскостям стандартного среза. Другим графическим изображением, которое обычно отображается с изображениями, является частота сердечных сокращений плода, производимая генератором 54 частоты сердечных сокращений плода, что является важным фактором для многих диагнозов.
В принципе, в работе и управлении матричным зондом в реализации согласно настоящему изобретению можно использовать элементы функциональности матричного зонда при работе в двухпроекционном режиме. Патенты США 6709394 (Frisa и др.) и 6755786 (Frisa и др.) описывают ультразвуковую двухпроекционную визуализацию. При двухпроекционной визуализации зонд с двумерным матричным преобразователем сканирует две различные двумерные плоскости изображения в быстром сменяющем друг друга следовании, тем самым производя изображения прямой передачи в реальном времени в обеих плоскостях. Одна из плоскостей изображения определяется как опорная плоскость изображения. Эта плоскость изображения ориентирована, как правило, перпендикулярно плоскости матричного преобразователя, продолжаясь прямо от зонда вокруг центральной ортогональной оси к массиву. Ориентацию опорного изображения обычно поддерживают неподвижной, а вторая плоскость изображения может двигаться пользователем по отношению к этой опорной плоскости. В патенте '394 описана двухпроекционная визуализация, при которой вторую плоскость изображения можно наклонять или поворачивать относительно опорной плоскости. В коммерческом варианте осуществления, доступном от Philips Healthcare of Andover, MA, наклоненная плоскость изображения имеет заданную ориентацию центральной оси на одной линии с центральной осью опорной плоскости. Наклонную плоскость можно двигать (наклонять) таким образом, что она ориентируется под разными углами по отношению к центральной оси опорной плоскости, но ее центральная ось всегда расположена в опорной плоскости. Эта реализация двухпроекционного вращения, в свою очередь, имеет поначалу центральную ось второй (поворачивающейся) плоскости изображения, выровненной с центральной осью опорного изображения, и ориентация второго изображения ортогональна плоскости опорного изображения. Из этого исходного положения поворачивающуюся плоскость можно поворачивать вокруг ее центральной оси под углами относительно опорного изображения, которые отличаются от прямого.
Патент '786 описывает то, что известно как двухпроекционная визуализация с изменением по высоте и наклоном. При визуализации с изменением по высоте и наклоном второе изображение имеет исходное положение на одной линии с опорным изображением. Затем второе изображение отодвигают от опорной плоскости изображения в вертикальном направлении и могут отодвигать к разным плоскостям, которые не пересекают опорную плоскость изображения в интересующей области. Таким образом, две плоскости могут быть абсолютно параллельны или параллельны под углом, причем последнее является состоянием, когда вторая плоскость имеет общее с опорной плоскостью расположение вершины или пересекает опорную плоскость выше верха (на незначительную глубину) изображения. Двухпроекционные изображения позволяют клиницисту позиционировать опорную плоскость так, чтобы просмотреть целевую анатомию или интересующую область, а затем перемещать вторую плоскость для наблюдения других плоскостных изображений целевой анатомии. Как показано в вышеприведенных патентах, два двухпроекционных изображения отображаются рядом одновременно, так что клиницист может постоянно видеть опорное изображение при движении второй плоскости. Двухпроекционная визуализация позволяет клиницисту сканировать и наблюдать две плоскости изображения одновременно, при постоянном сохранении координат местоположений изображений внутри трехмерного объема, подлежащего сканированию, его или ее навигационным средством. Когда клиницист определяет место интересующей анатомии на обеих плоскостях изображения, одиночное изображение или цикл (последовательность изображений прямой передачи) могут быть зафиксированы или сохранены и отображены или воспроизведены позже при постановке окончательного диагноза. Реализация согласно настоящему изобретению может использовать два (двухпроекционных) изображения, когда требуются только два стандартных среза, и распространяется на изображения дополнительных плоскостей, когда нужны три стандартных среза или более. Центральная опорная плоскость изображения двухпроекционной визуализации может использоваться для получения исходного стандартного среза, такого как четырехкамерный срез. Когда четырехкамерный срез видно на опорном изображении, процессор 36 совмещения изображений сопоставляет изображение с ближайшей четырехкамерной плоскостью модели сердца, и модель сердца предоставляет относительные ориентации других требуемых стандартных срезов из их положений в модели сердца. Эти ориентации плоскостей увязываются в контроллере 74 формы луча, который затем автоматически начинает сканирование и отображение изображений этих других срезов в режиме реального времени. Если плод движется во время исследования, пользователь должен только переместить зонд для того, чтобы повторно захватить четырехкамерный срез в опорной плоскости изображения, процессор совмещения изображений снова сопоставляет изображение с четырехкамерной плоскостью модели сердца, ориентации других стандартных срезов идентифицируются в модели сердца, соединенной с контроллером формы луча, и возобновляется визуализация прямой передачи всех стандартных срезов.
Реализация согласно настоящему изобретению может работать с фиксированной моделью сердца или моделью, которую можно настроить. Например, модель сердца может быть моделью, которая представляет сердце в фазе конечной диастолы сердечного цикла. Затем совершается процесс совмещения изображения с изображением, зафиксированным в этой фазе сердцебиения плода. Это может быть сделано путем использования генератора 54 частоты сердечных сокращений плода, который может стробировать изображения в выбранных фазах сердечного цикла плода, который позволяет процессору совмещения выполнять сопоставление в тот момент, когда было получено изображение конечной диастолы.
На Фиг. 3 показан способ согласно настоящему изобретению, где модель сердца адаптируется к конкретному плоду. На этапе 302 установки пользователь не только выбирает стандартные срезы, которые требуются, но также вводит характеристики плода, такие как внутриутробный возраст плода, форму и развитие сердца плода, известные или подозреваемые нарушения сердечной деятельности или пороки развития или другую информацию, которая более конкретно описывает сердце плода, которое должно исследоваться. Эта информация затем используется на этапе 308 для адаптации модели сердца к конкретному плоду. Один из способов адаптации состоит в том, чтобы иметь библиотеку различных моделей сердца плода для разных внутриутробных возрастов плода. Ввод данных о внутриутробном возрасте плода позволяет выбрать модель сердца, которая наиболее близко подходит внутриутробному возрасту плода, который будет исследоваться, делая совмещение изображения проще и надежнее. Другой способ адаптации состоит в том, чтобы трансформировать или деформировать модель сердца к размеру и форме элементов в полученном изображении сердца плода, как описано в вышеуказанных публикации Peters и др. и заявке Radulescu и др. Смотри также международную патентную публикацию WO 2007/034425 (Ecabert и др.). Данная модель сердца может быть адаптирована практически к любым изображениям сердца плода и к разным фазам сердечного цикла. Изображение исходного стандартного среза совмещается с адаптированными данными модели сердца на этапе 310, и идентификация, сканирование и отображение других изображений стандартных срезов происходят на этапах 210 и 212, как и ранее.
На Фиг. 4 показана реализация с еще более высокой степенью автоматизации согласно настоящему изобретению. В этом способе пользователь начинает визуализацию не в 2D, а в 3D-режиме сбора данных. На этапе 404 пользователь находит подходящее 3D акустическое окно, из которого изображается все сердце плода в 3D, и на этапе 406 получается объемное изображение сердца плода. Процессор совмещения затем сопоставляет, по меньшей мере, одну плоскость объемного изображения так же, как при MPR реконструкции, например, с соответствующей плоскостью в модели 32 сердца. Плоскости стандартных срезов затем идентифицируются в модели сердца либо путем сопоставления всех плоскостей стандартного среза объемного ультразвукового изображения с соответствующими плоскостями модели сердца, либо посредством относительных ориентаций плоскостей стандартного среза модели сердца с одной сопоставляемой плоскостью модели ультразвукового изображения- сердца. Ориентации плоскостей стандартного среза поставляются матричному зонду (этап 210), который начнет сканирование и отображение 2D-плоскостей выбранного стандартного среза (этап 212). При этой реализации пользователь не должен находить даже первоначальный стандартный срез. Надо только захватить данные объемного изображения сердца плода, и ультразвуковая система идентифицирует и извлекает нужные плоскости стандартного среза и начинает их визуализацию без последующего ввода пользователя. Способ, показанный на Фиг. 4, может также включать адаптацию модели сердца, как уже было указано в описании Фиг. 3.
Для учета движения зонда или плода в способе, показанном на Фиг. 4, матричный зонд периодически получает другой набор данных объемного изображения на этапе 414. Новые данные объемного изображения снова используются, начиная с шага 406, для повторного определения ориентаций плоскостей стандартного среза и обновляют управление матричного зонда для того, чтобы изобразить требуемые плоскости стандартного среза. Пользователю необходимо только поместить зонд таким образом, чтобы полный набор данных объемного изображения мог непрерывно собираться по мере необходимости. Таким образом, система может продолжать отслеживать и отображать требуемые стандартные срезы в режиме реального времени без какого-либо взаимодействия с пользователем, что упрощает и ускоряет способность производить диагностику плода.
Claims (44)
1. Система ультразвуковой диагностики для визуализации нескольких плоскостей целевого анатомического объекта, содержащая:
матричный зонд, выполненный с возможностью сканирования в режиме реального времени множества плоскостей изображения в области тела;
контроллер для управления сканированием посредством матричного зонда;
процессор изображений, соединенный с матричный зондом, выполненный с возможностью формирования в режиме реального времени ультразвуковых изображений плоскостей изображения, сканируемых матричным зондом;
дисплей, соединенный с процессором изображений, для отображения ультразвуковых изображений в режиме реального времени;
данные, представляющие анатомическую модель анатомического объекта;
процессор совмещения изображений, выполненный с возможностью совмещения ультразвукового изображения с данными, представляющими анатомическую модель, генерирования данных ориентации плоскости изображения, выделенных из анатомической модели в ответ на совмещение ультразвукового изображения, и передачи данных ориентации плоскости изображения контроллеру,
при этом контроллер сконфигурирован для побуждения матричного зонда сканировать в режиме реального времени плоскость изображения, соответствующую данным ориентации плоскости изображения.
2. Система ультразвуковой диагностики по п. 1, в которой в качестве целевого анатомического объекта рассматривается сердце плода и анатомическая модель содержит модель сердца, при этом
процессор совмещения изображений обеспечивает совмещение опорного 2D-изображения сердца плода с плоскостью анатомической модели, при этом
данные об ориентации плоскости изображения идентифицируют по меньшей мере одну плоскость изображения стандартного среза.
3. Система ультразвуковой диагностики по п. 2, дополнительно содержащая пользовательский блок управления, посредством которого пользователь выбирает множество стандартных срезов.
4. Система ультразвуковой диагностики по п. 3, в которой опорное 2D-изображение сердца плода дополнительно содержит четырехкамерный срез.
5. Система ультразвуковой диагностики по п. 4, в которой по меньшей мере одна плоскость изображения стандартного среза является плоскостью изображения выводного тракта ЛЖ, или выводного тракта ПЖ, или пятикамерным срезом, или срезом через три главных сосуда, или срезом трахеи.
6. Система ультразвуковой диагностики по п. 5, в которой дисплей отображает одновременно ультразвуковые изображения множества стандартных срезов в режиме реального времени и
в которой дисплей дополнительно отображает графическую иконку сердца, указывающую относительную ориентацию плоскости по меньшей мере одного ультразвукового изображения в режиме реального времени сердца плода.
7. Способ ультразвуковой визуализации множества различных выбранных плоскостей изображения целевого анатомического объекта в режиме реального времени, содержащий:
выбор множества отличных друг от друга плоскостей изображения анатомического объекта, причем первая плоскость изображения является одной из выбранных плоскостей изображения;
позиционирование матричного зонда в акустическом окне для целевого анатомического объекта;
получение 2D-изображения первой плоскости анатомического объекта;
совмещение 2D-изображения с данными анатомической модели целевого анатомического объекта;
идентификацию данных ориентации второй плоскости изображения целевого анатомического объекта в ответ на совмещение 2D-изображения первой плоскости, при этом координаты плоскости второй плоскости изображения находятся из данных анатомической модели;
управление посредством контроллера формы луча матричным зондом для сканирования первой плоскости и второй плоскости изображения в режиме реального времени в ответ на данные об ориентации, причем данные об ориентации соединяют в стробирующий сигнал для контроллера формы луча; и
одновременное отображение ультразвуковых изображений первой плоскости и второй плоскости изображения в режиме реального времени.
8. Способ по п. 7, в котором качестве целевого анатомического объекта рассматривают сердце плода и анатомическая модель содержит модель сердца, при этом
первая плоскость и вторая плоскость изображения дополнительно содержат плоскости изображения стандартных срезов сердца плода.
9. Способ по п. 7, дополнительно содержащий отображение графической иконки, которая определяет относительные ориентации одной из плоскостей анатомического объекта.
10. Способ по п. 7, дополнительно содержащий адаптацию анатомической модели к характеристикам пациента.
11. Способ по п. 10, дополнительно содержащий:
ввод данных характеристик пациента в ультразвуковую систему и
адаптацию анатомической модели к введенным данным характеристик пациента.
12. Способ по п. 11, в котором адаптация анатомической модели к введенным данным характеристик пациента дополнительно содержит выбор данных анатомической модели в ответ на введенные данные характеристик пациента.
13. Способ по п. 10, в котором адаптация анатомической модели дополнительно содержит деформацию или трансформацию данных анатомической модели в 2D-изображении.
14. Способ ультразвуковой визуализации множества различных выбранных плоскостей изображения целевого анатомического объекта в режиме реального времени, содержащий:
выбор множества отличных друг от друга плоскостей изображения целевого анатомического объекта, причем первая плоскость изображения является одной из выбранных плоскостей изображения;
позиционирование матричного зонда в акустическом окне на целевом анатомическом объекте;
получение набора данных объемного изображения целевого анатомического объекта;
совмещение по меньшей мере одной плоскости из набора данных объемного изображения с данными анатомической модели целевого анатомического объекта;
идентификацию данных об ориентации множества выбранных плоскостей изображения целевого анатомического объекта в ответ на совмещение по меньшей мере одной плоскости изображения из набора данных объемного изображения, при этом плоскости стандартного среза идентифицируют в анатомической модели;
управление посредством контроллера формы луча матричным зондом для сканирования множества выбранных плоскостей изображения в ответ на данные ориентации плоскостей стандартного среза, причем данные об ориентации соединяются в стробирующем сигнале для контроллера формы луча; и
одновременное отображение ультразвуковых изображений выбранных плоскостей изображения в режиме реального времени.
15. Способ по п. 14, дополнительно включающий в себя:
периодическое получение другого набора данных объемного изображения целевого анатомического объекта и
обновление данных об ориентации в ответ на другой набор данных объемного изображения.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201261728566P | 2012-11-20 | 2012-11-20 | |
| US61/728,566 | 2012-11-20 | ||
| PCT/IB2013/060105 WO2014080319A1 (en) | 2012-11-20 | 2013-11-13 | Automatic positioning of standard planes for real-time fetal heart evaluation |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2015124063A RU2015124063A (ru) | 2017-01-10 |
| RU2654611C2 true RU2654611C2 (ru) | 2018-05-21 |
Family
ID=49713434
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2015124063A RU2654611C2 (ru) | 2012-11-20 | 2013-11-13 | Автоматическое позиционирование стандартных плоскостей для оценки сердца плода в режиме реального времени |
Country Status (7)
| Country | Link |
|---|---|
| US (2) | US9734626B2 (ru) |
| EP (1) | EP2922477B1 (ru) |
| JP (1) | JP6180539B2 (ru) |
| CN (1) | CN104797199B (ru) |
| BR (1) | BR112015011288B1 (ru) |
| RU (1) | RU2654611C2 (ru) |
| WO (1) | WO2014080319A1 (ru) |
Families Citing this family (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6272618B2 (ja) * | 2013-09-25 | 2018-01-31 | ハートフロー, インコーポレイテッド | 自動医療画像注釈の検証及び修正のためのシステム、方法及びコンピュータ可読媒体 |
| EP3066643B1 (en) * | 2013-11-05 | 2020-05-27 | Koninklijke Philips N.V. | Automated segmentation of tri-plane images for real time ultrasonic imaging |
| KR20150074304A (ko) * | 2013-12-23 | 2015-07-02 | 삼성전자주식회사 | 의료 영상 정보를 제공하는 방법 및 그 장치 |
| US11684343B2 (en) | 2014-06-30 | 2023-06-27 | Koninklijke Philips N.V. | Translation of ultrasound array responsive to anatomical orientation |
| JP5918324B2 (ja) * | 2014-09-08 | 2016-05-18 | 日立アロカメディカル株式会社 | 超音波診断装置 |
| JP6619431B2 (ja) * | 2014-11-28 | 2019-12-11 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 解剖学的構造のモデルベースセグメンテーション |
| KR102446343B1 (ko) * | 2015-06-15 | 2022-09-22 | 삼성메디슨 주식회사 | 초음파 장치 및 그 제어방법 |
| JP7080177B6 (ja) * | 2016-03-01 | 2022-06-23 | コーニンクレッカ フィリップス エヌ ヴェ | 項部襞透過像の自動超音波測定 |
| WO2017181288A1 (en) | 2016-04-21 | 2017-10-26 | The University Of British Columbia | Echocardiographic image analysis |
| US11298104B2 (en) * | 2016-08-10 | 2022-04-12 | Canon Medical Systems Corporation | Medical processing apparatus, ultrasound diagnostic apparatus, and medical processing method |
| JP6987558B2 (ja) * | 2016-08-10 | 2022-01-05 | キヤノンメディカルシステムズ株式会社 | 医用処理装置、超音波診断装置および医用処理プログラム |
| US11696745B2 (en) * | 2017-03-16 | 2023-07-11 | Koninklijke Philips N.V. | Optimal scan plane selection for organ viewing |
| US20180322627A1 (en) * | 2017-05-05 | 2018-11-08 | General Electric Company | Methods and systems for acquisition of medical images for an ultrasound exam |
| EP3422048A1 (en) * | 2017-06-26 | 2019-01-02 | Koninklijke Philips N.V. | Ultrasound imaging method and system |
| WO2019045144A1 (ko) * | 2017-08-31 | 2019-03-07 | (주)레벨소프트 | 의료용 항법 장치를 위한 의료 영상 처리 장치 및 의료 영상 처리 방법 |
| US10628932B2 (en) * | 2017-10-27 | 2020-04-21 | Butterfly Network, Inc. | Quality indicators for collection of and automated measurement on ultrasound images |
| US11666305B2 (en) | 2018-02-12 | 2023-06-06 | Koninklijke Philips N.V. | Workflow assistance for medical doppler ultrasound evaluation |
| EP3549528A1 (en) * | 2018-04-05 | 2019-10-09 | Koninklijke Philips N.V. | Ultrasound imaging system and method |
| US10751029B2 (en) | 2018-08-31 | 2020-08-25 | The University Of British Columbia | Ultrasonic image analysis |
| KR20200099910A (ko) | 2019-02-15 | 2020-08-25 | 삼성메디슨 주식회사 | 초음파 영상을 표시하는 방법, 장치 및 컴퓨터 프로그램 제품 |
| US11517290B2 (en) * | 2019-03-13 | 2022-12-06 | GE Precision Healthcare LLC | Method and system for providing standard ultrasound scan plane views using automatic scan acquisition rotation and view detection |
| EP3711673A1 (en) * | 2019-03-18 | 2020-09-23 | Koninklijke Philips N.V. | Methods and systems for adjusting the field of view of an ultrasound probe |
| US20210015449A1 (en) * | 2019-07-16 | 2021-01-21 | GE Precision Healthcare LLC | Methods and systems for processing and displaying fetal images from ultrasound imaging data |
| CN111127305B (zh) * | 2019-10-14 | 2021-01-26 | 李胜利 | 基于早孕期胎儿颅面部三维容积自动获取标准切面的方法 |
| US20210204908A1 (en) * | 2020-01-08 | 2021-07-08 | GE Precision Healthcare LLC | Method and system for assisted ultrasound scan plane identification based on m-mode analysis |
| JP6874199B1 (ja) * | 2020-12-01 | 2021-05-19 | 信二 福家 | 心臓モデル導入装置、心臓診断支援システム、プログラム、および心臓モデル導入方法 |
| JP2022090787A (ja) * | 2020-12-08 | 2022-06-20 | 富士フイルムヘルスケア株式会社 | 超音波診断システム及び操作支援方法 |
| US11593936B2 (en) | 2020-12-28 | 2023-02-28 | GE Precision Healthcare LLC | Ultrasound imaging system and method for providing feedback regarding acquisition quality |
| CN116687445B (zh) * | 2023-07-31 | 2024-01-30 | 深圳华声医疗技术股份有限公司 | 超声胎儿心脏自动定位跟踪方法、装置、设备及存储介质 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5050610A (en) * | 1990-11-14 | 1991-09-24 | Advanced Technology Laboratories, Inc. | Transesophageal ultrasonic scanhead |
| US20050251036A1 (en) * | 2003-04-16 | 2005-11-10 | Eastern Virginia Medical School | System, method and medium for acquiring and generating standardized operator independent ultrasound images of fetal, neonatal and adult organs |
| US20050283079A1 (en) * | 2004-06-22 | 2005-12-22 | Steen Erik N | Method and apparatus for medical ultrasound navigation user interface |
| US20070249935A1 (en) * | 2006-04-20 | 2007-10-25 | General Electric Company | System and method for automatically obtaining ultrasound image planes based on patient specific information |
| US20080009722A1 (en) * | 2006-05-11 | 2008-01-10 | Constantine Simopoulos | Multi-planar reconstruction for ultrasound volume data |
| US20120078097A1 (en) * | 2010-09-27 | 2012-03-29 | Siemens Medical Solutions Usa, Inc. | Computerized characterization of cardiac motion in medical diagnostic ultrasound |
Family Cites Families (48)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5207225A (en) * | 1990-11-14 | 1993-05-04 | Advanced Technology Laboratories, Inc. | Transesophageal ultrasonic scanhead |
| US6106466A (en) * | 1997-04-24 | 2000-08-22 | University Of Washington | Automated delineation of heart contours from images using reconstruction-based modeling |
| US5997479A (en) | 1998-05-28 | 1999-12-07 | Hewlett-Packard Company | Phased array acoustic systems with intra-group processors |
| US6174285B1 (en) * | 1999-02-02 | 2001-01-16 | Agilent Technologies, Inc. | 3-D ultrasound imaging system with pre-set, user-selectable anatomical images |
| US6669641B2 (en) | 2000-08-17 | 2003-12-30 | Koninklijke Philips Electronics N.V. | Method of and system for ultrasound imaging |
| US6755788B2 (en) | 2000-08-17 | 2004-06-29 | Koninklijke Philips Electronics N. V. | Image orientation display for a three dimensional ultrasonic imaging system |
| US7037264B2 (en) * | 2000-08-17 | 2006-05-02 | Koninklijke Philips Electronics N.V. | Ultrasonic diagnostic imaging with steered image plane |
| US6709394B2 (en) | 2000-08-17 | 2004-03-23 | Koninklijke Philips Electronics N.V. | Biplane ultrasonic imaging |
| US6468216B1 (en) | 2000-08-24 | 2002-10-22 | Kininklijke Philips Electronics N.V. | Ultrasonic diagnostic imaging of the coronary arteries |
| US20030160786A1 (en) * | 2002-02-28 | 2003-08-28 | Johnson Richard K. | Automatic determination of borders of body structures |
| US7599730B2 (en) * | 2002-11-19 | 2009-10-06 | Medtronic Navigation, Inc. | Navigation system for cardiac therapies |
| AU2004231713A1 (en) * | 2003-04-16 | 2004-11-04 | Eastern Virginia Medical School | System and method for generating operator independent ultrasound images |
| US7092749B2 (en) | 2003-06-11 | 2006-08-15 | Siemens Medical Solutions Usa, Inc. | System and method for adapting the behavior of a diagnostic medical ultrasound system based on anatomic features present in ultrasound images |
| WO2005004065A1 (en) * | 2003-06-25 | 2005-01-13 | Siemens Corporate Research, Inc. | Model assisted planning of medical imaging |
| US20050028307A1 (en) * | 2003-08-06 | 2005-02-10 | Kuei-Kun Wu | Snake |
| US7599136B2 (en) * | 2005-07-27 | 2009-10-06 | Honda Motor Co., Ltd. | Ambient light lens |
| EP1929444B1 (en) | 2005-09-23 | 2011-11-16 | Philips Intellectual Property & Standards GmbH | A method of and a system for adapting a geometric model using multiple partial transformations |
| JP5113077B2 (ja) | 2005-12-19 | 2013-01-09 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 変形可能なメッシュを用いて画像の後処理を容易にする方法 |
| JP2010512218A (ja) * | 2006-12-12 | 2010-04-22 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 医用イメージングシステム |
| US8706195B2 (en) * | 2007-05-08 | 2014-04-22 | Mediguide Ltd. | Method for producing an electrophysiological map of the heart |
| US8057394B2 (en) * | 2007-06-30 | 2011-11-15 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Ultrasound image processing to render three-dimensional images from two-dimensional images |
| US8073215B2 (en) * | 2007-09-18 | 2011-12-06 | Siemens Medical Solutions Usa, Inc. | Automated detection of planes from three-dimensional echocardiographic data |
| US8172753B2 (en) * | 2008-07-11 | 2012-05-08 | General Electric Company | Systems and methods for visualization of an ultrasound probe relative to an object |
| EP2340444A1 (en) * | 2008-10-22 | 2011-07-06 | Koninklijke Philips Electronics N.V. | 3-d ultrasound imaging |
| CN102197413B (zh) * | 2008-10-29 | 2017-03-22 | 皇家飞利浦电子股份有限公司 | 分析至少三维医学图像 |
| US20100172559A1 (en) * | 2008-11-11 | 2010-07-08 | Eigen, Inc | System and method for prostate biopsy |
| RU2539006C2 (ru) * | 2009-06-30 | 2015-01-10 | Конинклейке Филипс Электроникс Н.В. | Формирование трехмерного изображения сердца плода посредством физиологически стробированного получения данных, не связанного с экг |
| KR101121353B1 (ko) * | 2009-08-03 | 2012-03-09 | 한국과학기술원 | 2차원 초음파 영상에 대응하는 2차원 ct 영상을 제공하는 시스템 및 방법 |
| ITGE20090070A1 (it) * | 2009-08-31 | 2011-03-01 | Esaote Spa | Metodo e dispositivo per il rilevamento e la visualizzazione di informazioni emodinamiche in particolare del flusso ematico nelle vene, mediante ultrasoni |
| DE102009053471B4 (de) * | 2009-11-16 | 2018-08-02 | Siemens Healthcare Gmbh | Verfahren und Vorrichtung zur Identifizierung und Zuordnung von Koronarkalk zu einem Herzkranzgefäß sowie Computerprogrammprodukt |
| JP5394299B2 (ja) * | 2010-03-30 | 2014-01-22 | 富士フイルム株式会社 | 超音波診断装置 |
| CN102946810B (zh) | 2010-06-17 | 2015-06-24 | 皇家飞利浦电子股份有限公司 | 用于3d超声胎儿成像的自动心率检测 |
| US20110317897A1 (en) * | 2010-06-29 | 2011-12-29 | General Electric Company | Method and apparatus for automated localization of a moving structure |
| US8633907B2 (en) * | 2010-07-06 | 2014-01-21 | Padmanabhan Mahalingam | Touch screen overlay for visually impaired persons |
| TWI483017B (zh) * | 2010-07-07 | 2015-05-01 | Hon Hai Prec Ind Co Ltd | 光纖耦合連接器 |
| US9668716B2 (en) * | 2010-12-10 | 2017-06-06 | General Electric Company | Ultrasound imaging system and method for ultrasound imaging a three dimensional volume |
| EP2651307B1 (en) * | 2010-12-13 | 2017-11-15 | Koninklijke Philips N.V. | Adjusting measurements of the effects of acoustic radiation force for background motion effects |
| US8657750B2 (en) * | 2010-12-20 | 2014-02-25 | General Electric Company | Method and apparatus for motion-compensated ultrasound imaging |
| US20120165671A1 (en) * | 2010-12-27 | 2012-06-28 | Hill Anthony D | Identification of objects in ultrasound |
| KR101792590B1 (ko) * | 2011-04-26 | 2017-11-01 | 삼성전자주식회사 | 빔포밍 방법, 이를 수행하는 장치 및 의료영상시스템 |
| US20130007099A1 (en) * | 2011-06-30 | 2013-01-03 | Michael Lee | System and Method for Interactive Identification and Matching of Funding and/or Advisory Seekers and Funding and/or Advisory Providers |
| US9204862B2 (en) * | 2011-07-08 | 2015-12-08 | General Electric Company | Method and apparatus for performing ultrasound elevation compounding |
| KR101286222B1 (ko) * | 2011-09-19 | 2013-07-15 | 삼성메디슨 주식회사 | 영상을 처리하는 방법, 장치, 초음파 진단장치 및 의료영상시스템 |
| US8867822B2 (en) * | 2011-10-14 | 2014-10-21 | Fujifilm Corporation | Model-based coronary artery calcium scoring |
| BR112014016816A8 (pt) * | 2012-01-10 | 2017-07-04 | Koninklijke Philips Nv | aparelho de processamento de imagem para processar uma imagem médica; estação de trabalho; aparelho de obtenção de imagem; método de processamento de uma imagem médica; e produto de programa de computador |
| WO2013114257A2 (en) * | 2012-02-03 | 2013-08-08 | Koninklijke Philips N.V. | Imaging apparatus for imaging an object |
| US9427211B2 (en) * | 2012-07-10 | 2016-08-30 | General Electric Company | Ultrasound imaging system and method |
| KR20140024190A (ko) * | 2012-08-20 | 2014-02-28 | 삼성메디슨 주식회사 | 초음파 영상 관리 방법, 표시 방법 및 그 장치 |
-
2013
- 2013-11-13 WO PCT/IB2013/060105 patent/WO2014080319A1/en active Application Filing
- 2013-11-13 RU RU2015124063A patent/RU2654611C2/ru active
- 2013-11-13 EP EP13799689.8A patent/EP2922477B1/en active Active
- 2013-11-13 US US14/646,048 patent/US9734626B2/en active Active
- 2013-11-13 BR BR112015011288-9A patent/BR112015011288B1/pt active IP Right Grant
- 2013-11-13 JP JP2015542393A patent/JP6180539B2/ja active Active
- 2013-11-13 CN CN201380060524.3A patent/CN104797199B/zh active Active
-
2017
- 2017-07-26 US US15/659,934 patent/US10410409B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5050610A (en) * | 1990-11-14 | 1991-09-24 | Advanced Technology Laboratories, Inc. | Transesophageal ultrasonic scanhead |
| US20050251036A1 (en) * | 2003-04-16 | 2005-11-10 | Eastern Virginia Medical School | System, method and medium for acquiring and generating standardized operator independent ultrasound images of fetal, neonatal and adult organs |
| US20050283079A1 (en) * | 2004-06-22 | 2005-12-22 | Steen Erik N | Method and apparatus for medical ultrasound navigation user interface |
| US20070249935A1 (en) * | 2006-04-20 | 2007-10-25 | General Electric Company | System and method for automatically obtaining ultrasound image planes based on patient specific information |
| US20080009722A1 (en) * | 2006-05-11 | 2008-01-10 | Constantine Simopoulos | Multi-planar reconstruction for ultrasound volume data |
| US20120078097A1 (en) * | 2010-09-27 | 2012-03-29 | Siemens Medical Solutions Usa, Inc. | Computerized characterization of cardiac motion in medical diagnostic ultrasound |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2014080319A1 (en) | 2014-05-30 |
| US10410409B2 (en) | 2019-09-10 |
| US9734626B2 (en) | 2017-08-15 |
| EP2922477A1 (en) | 2015-09-30 |
| JP2015534872A (ja) | 2015-12-07 |
| CN104797199A (zh) | 2015-07-22 |
| BR112015011288A2 (pt) | 2017-07-11 |
| BR112015011288B1 (pt) | 2022-06-21 |
| US20150302638A1 (en) | 2015-10-22 |
| CN104797199B (zh) | 2018-02-23 |
| RU2015124063A (ru) | 2017-01-10 |
| JP6180539B2 (ja) | 2017-08-16 |
| EP2922477B1 (en) | 2018-01-10 |
| US20170337731A1 (en) | 2017-11-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2654611C2 (ru) | Автоматическое позиционирование стандартных плоскостей для оценки сердца плода в режиме реального времени | |
| US11653897B2 (en) | Ultrasonic diagnostic apparatus, scan support method, and medical image processing apparatus | |
| JP5715123B2 (ja) | 非ecgの生体同期収集による三次元胎児心臓撮像方法を用いた超音波画像診断システム及び方法 | |
| JP5620666B2 (ja) | 超音波診断装置、超音波画像処理装置 | |
| JP5586203B2 (ja) | 超音波診断装置、超音波画像処理装置及び超音波画像処理プログラム | |
| US20140108053A1 (en) | Medical image processing apparatus, a medical image processing method, and ultrasonic diagnosis apparatus | |
| CN109310399B (zh) | 医学超声图像处理设备 | |
| JP5897674B2 (ja) | 超音波診断装置、画像処理装置及び画像処理プログラム | |
| US10368841B2 (en) | Ultrasound diagnostic apparatus | |
| JP2009045252A (ja) | 超音波診断装置 | |
| US9888905B2 (en) | Medical diagnosis apparatus, image processing apparatus, and method for image processing | |
| US9437043B2 (en) | Display and export of individual biplane images | |
| JP6720001B2 (ja) | 超音波診断装置、及び医用画像処理装置 | |
| JP2007143606A (ja) | 超音波診断装置 | |
| US20200196981A1 (en) | Automated sweep and export of 2d ultrasound images of 3d volumes | |
| JP5417047B2 (ja) | 超音波診断装置 | |
| WO2010109514A1 (ja) | 超音波診断装置 |