RU2570958C2 - Идентификатор положения начала и/или конца сканирования - Google Patents
Идентификатор положения начала и/или конца сканирования Download PDFInfo
- Publication number
- RU2570958C2 RU2570958C2 RU2013111842/14A RU2013111842A RU2570958C2 RU 2570958 C2 RU2570958 C2 RU 2570958C2 RU 2013111842/14 A RU2013111842/14 A RU 2013111842/14A RU 2013111842 A RU2013111842 A RU 2013111842A RU 2570958 C2 RU2570958 C2 RU 2570958C2
- Authority
- RU
- Russia
- Prior art keywords
- scan
- subject
- support
- identifier
- area
- Prior art date
Links
- 238000000034 method Methods 0.000 claims abstract description 17
- 238000012800 visualization Methods 0.000 claims abstract description 9
- 238000003384 imaging method Methods 0.000 claims description 12
- 230000008859 change Effects 0.000 claims description 9
- 239000000463 material Substances 0.000 claims description 6
- 230000000007 visual effect Effects 0.000 claims description 6
- 239000003550 marker Substances 0.000 claims description 5
- 230000005540 biological transmission Effects 0.000 claims description 4
- 238000007689 inspection Methods 0.000 claims description 4
- 230000015572 biosynthetic process Effects 0.000 claims description 2
- 230000005855 radiation Effects 0.000 abstract description 14
- 239000003814 drug Substances 0.000 abstract 1
- 239000000126 substance Substances 0.000 abstract 1
- 238000013459 approach Methods 0.000 description 9
- 230000003993 interaction Effects 0.000 description 8
- 238000003825 pressing Methods 0.000 description 7
- 238000002591 computed tomography Methods 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 239000002245 particle Substances 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 238000004659 sterilization and disinfection Methods 0.000 description 2
- 206010028980 Neoplasm Diseases 0.000 description 1
- 206010038743 Restlessness Diseases 0.000 description 1
- 230000003213 activating effect Effects 0.000 description 1
- 230000002730 additional effect Effects 0.000 description 1
- 210000001124 body fluid Anatomy 0.000 description 1
- 239000010839 body fluid Substances 0.000 description 1
- 210000004556 brain Anatomy 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 230000001066 destructive effect Effects 0.000 description 1
- 238000002059 diagnostic imaging Methods 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 210000002216 heart Anatomy 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 210000004072 lung Anatomy 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 239000012528 membrane Substances 0.000 description 1
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000012552 review Methods 0.000 description 1
- 238000010187 selection method Methods 0.000 description 1
- 238000002603 single-photon emission computed tomography Methods 0.000 description 1
- 230000001954 sterilising effect Effects 0.000 description 1
Images



Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/04—Positioning of patients; Tiltable beds or the like
- A61B6/0492—Positioning of patients; Tiltable beds or the like using markers or indicia for aiding patient positioning
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/02—Arrangements for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis
- A61B6/03—Computed tomography [CT]
- A61B6/032—Transmission computed tomography [CT]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/04—Positioning of patients; Tiltable beds or the like
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/04—Positioning of patients; Tiltable beds or the like
- A61B6/0407—Supports, e.g. tables or beds, for the body or parts of the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/04—Positioning of patients; Tiltable beds or the like
- A61B6/0487—Motor-assisted positioning
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/08—Auxiliary means for directing the radiation beam to a particular spot, e.g. using light beams
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/54—Control of apparatus or devices for radiation diagnosis
- A61B6/545—Control of apparatus or devices for radiation diagnosis involving automatic set-up of acquisition parameters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/54—Control of apparatus or devices for radiation diagnosis
- A61B6/547—Control of apparatus or devices for radiation diagnosis involving tracking of position of the device or parts of the device
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/54—Control of apparatus or devices for radiation diagnosis
- A61B6/548—Remote control of the apparatus or devices
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/44—Constructional features of apparatus for radiation diagnosis
- A61B6/4423—Constructional features of apparatus for radiation diagnosis related to hygiene or sterilisation
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Radiology & Medical Imaging (AREA)
- Molecular Biology (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Physics & Mathematics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- High Energy & Nuclear Physics (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Pulmonology (AREA)
- Theoretical Computer Science (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
- Apparatus For Radiation Diagnosis (AREA)
Abstract
Изобретение относится к медицинской технике. Опора содержит подвижную часть, которая включает в себя поверхность, на которой помещается субъект, и которая сконфигурирована с возможностью двигаться в область обследования системы визуализации, где субъект должен сканироваться; и идентификатор положения сканирования, который формирует сигнал, указывающий по меньшей мере одно из начального положения сканирования или конечного положения сканирования для заранее заданной интересующей области субъекта на основе расположения интересующей области на подвижной части опоры для субъекта для произвольного относительного положения подвижной части по отношению к области обследования. Идентификатор положения сканирования включает в себя линию передачи с емкостной лентой. Раскрыт способ создания плана сканирования с использованием опоры для субъекта. Изобретения повышают точность совпадения сканированного объема с объемом, необходимым для сканирования интересующей ткани, а также снижают дозу излучения для пациента. 2 н. и 13 з.п. ф-лы, 11 ил.
Description
Следующее в целом относится к визуализации объекта или субъекта и, в частности, к идентификации по меньшей мере одного из: начального положения сканирования и конечного положения сканирования объекта или субъекта, который должен быть просканирован.
Медицинская визуализация была использована для целевого исследования конкретных тканей, таких как сердце, легкие, головной мозг, рука, нога, туловище, тело в целом, опухоль и т.д. Системы визуализации, такие как компьютерный томограф, вообще являются стационарными, а субъект (или объект) для сканирования перемещается в область обследования системы визуализации и из нее с помощью опоры для субъекта, чтобы определенный продольный объем субъекта, охватывающий ткани, подлежащие сканированию, проходил через область обследования и сканировался. Объем обычно определяется начальным положением по отношению к горизонтальному перемещению опоры для субъекта и длиной или конечным положением по отношению к начальному положению. Начальное положение определяется по результатам предварительного сканирования (обзора, поиска или пробы).
Для предварительного сканирования субъект помещается на опору для субъекта. По одной методике техник перемещает опору для субъекта в область обследования, и лазер, неподвижно прикрепленный к сканеру, обеспечивает визуальную индикацию изоцентра области обследования для техника. Техник позиционирует опору для субъекта в области обследования так, что положение начала сканирования для интересующей области субъекта, подлежащего сканированию, определяется по отношению к изоцентру с использованием фиксированного лазера. По другой методике положение начала сканирования устанавливается по отношению к внешнему лазеру, и опора для субъекта автоматически перемещается на заранее запрограммированное расстояние от внешнего лазера до изоцентра. Техник может инициировать предварительное сканирование, чтобы начать сканирование от положения начала сканирования.
По другой методике техник позиционирует субъект в области обследования по отношению к изоцентру и горизонтальное положение опоры для субъекта устанавливается на ноль, чтобы обозначить исходное положение. Техник затем может свободно перемещать опору для субъекта от этого положения, для облегчения подготовки субъекта к сканированию. Техник затем может ввести исходное положение нуля на консоли, чтобы начать предварительное сканирование, и опора для субъекта автоматически перемещается в нулевое положение для предварительного сканирования.
К сожалению, все вышеприведенные методики требуют перемещения опоры для субъекта к фиксированному положению, отмечающему начало сканирования, чтобы определить начальное положение относительно области обследования, что требует дополнительных шагов, что требует времени, которое могло бы в противном случае быть использовано для работы с субъектом, для собственно процедуры и/или для улучшения пропускной способности.
Как только положение начала сканирования определено, обычно определяется длина или положение конца сканирования. По одной методике длина сканирования по умолчанию автоматически выбирается в зависимости от выбранного протокола сканирования. К сожалению, настройка по умолчанию может не быть оптимальной или хорошо подходящей для каждого субъекта и, как следствие, может привести к получению пациентом неоправданной дозы облучения. По другой методике техник устанавливает длину на основе своих знаний требуемой длины сканирования или размера пациента. Как правило, эта длина будет значительно завышена по сравнению с необходимой длиной, так как если ошибиться в определении длины сканирования в меньшую сторону, то может понадобиться повторное сканирование субъекта, чтобы получить необходимую для планирования длину. К сожалению, излишнее сканирование и повторное сканирование увеличивают дозу облучения, получаемую пациентом.
По другой методике длина сканирования не устанавливается, и техник начинает сканирование и просто останавливает сканирование с помощью элементов управления на консоли, когда сочтет, что покрытие пациента достаточно, чтобы планировать диагностическое сканирование. Однако этот подход требует от техника быть очень внимательным, в то время как сканирование отображается строка за строкой в реальном времени и зависит от их быстрой реакции для остановки сканирования, подходящее время. Даже в этом случае все еще может быть некоторая задержка с того момента, когда изображение положения на пациенте фактически создано, до того времени, когда соответствующая строка отобразится на экране консоли. Дополнительное время может потребоваться также для реакции техника, а затем для системы, чтобы отработать запрос на остановку. Любая дополнительная длина сканирования занимает дополнительное время и может повлечь за собой излишнюю дозу облучения пациента.
Аспекты настоящей заявки решают вышеуказанные и другие вопросы.
Согласно одному аспекту, опора для субъекта для системы визуализации включает в себя подвижную часть, которая включает в себя поверхность, на которую помещается субъект, и которая сконфигурирована с возможностью двигаться в область обследования системы визуализации, где должен быть просканирован субъект. Опора дополнительно включает в себя идентификатор положения сканирования, который формирует сигнал, указывающий по меньшей мере на одно из начального положения сканирования или конечного положения сканирования для заданной интересующей области субъекта на основе расположения целевой области на подвижной части опоры для субъекта для произвольного относительного положения подвижной части по отношению к области обследования.
Согласно другому аспекту, способ включает в себя формирование первого сигнала, указывающего одно из начального положения сканирования или конечного положения сканирования путем совмещения первого маркера сканирования с первой интересующей областью субъекта, помещенного на подвижную часть опоры для субъекта независимо от положения подвижной части по отношению к области обследования, в которой сканируется целевая область, и создание плана сканирования с по меньшей мере одним из положения начала или конца сканирования на основе сигнала.
Согласно другому аспекту, система визуализации включает в себя стационарный гентри и вращающийся гентри. Вращающийся гентри включает в себя источник излучения, который испускает излучение, и воспринимающую излучение детекторную матрицу, расположенную напротив источника с противоположной стороны области обследования. Опора для субъекта поддерживает сканируемый субъект и сконфигурирована с возможностью перемещения субъекта в область обследования и из нее. Идентификатор положения сканирования идентифицирует по меньшей мере начальное положение сканирования субъекта исключительно на основе положения субъекта на опоре для субъекта.
Изобретение может принимать форму различных компонентов и компоновок компонентов, а также различных этапов и различных расположений этапов. Чертежи служат только для целей иллюстрации предпочтительных вариантов осуществления и не должны рассматриваться как ограничивающие изобретение.
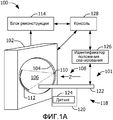
Фиг.1 иллюстрирует пример системы визуализации в связи с идентификатором положения сканирования, который облегчает идентификацию по меньшей мере одного из положения начала сканирования, положения конца сканирования или протяженности (длины) сканирования.
Фиг.2-9 показывают различные неограничивающие варианты осуществления идентификатора положения сканирования в связи с примерной системой визуализации по Фиг.1.
Фиг.10 иллюстрирует неограничивающую примерную реализацию идентификатора положения сканирования.
Фиг.11 иллюстрирует способ для идентификации по меньшей мере одного из положений начала или конца сканирования с использованием идентификатора положения сканирования.
Фиг.1 иллюстрирует систему 100 визуализации, такую как сканер компьютерной томографии (КТ). В других вариантах осуществления система 100 визуализации дополнительно или альтернативно включает в себя один или несколько других методов визуализации. Иллюстрированная система 100 визуализации включает в себя стационарный гентри 102 и вращающийся гентри 104. Вращающийся гентри 104 поддерживается с возможностью вращения стационарным гентри 102 и вращается вокруг области 106 обследования вдоль продольной или z-оси 108. Источник 110 излучения, такой как рентгеновская трубка, поддерживается вращающимся гентри 104. Источник 110 излучения испускает излучение, которое проходит через область 106 обследования и объект или субъект в ней. Коллиматор источника коллимирует излучение с образованием пучка излучения обычно конической, клиновидной, веерообразной или другой формы. Воспринимающая излучение детекторная матрица 112 противолежит на угловой дуге, противоположной источнику 110 излучения с другой стороны области 106 обследования. Детекторная матрица 112 включает в себя один или несколько рядов детекторов. Детекторная матрица 112 обнаруживает излучение, проходящее через область 106 обследования, и формирует показывающие ее проекционные данные. Блок 114 реконструкции реконструирует проекционные данные и формирует соответствующие им данные объемного изображения.
Опора 118 для субъекта поддерживает сканируемый объект или субъект, такой как пациент в виде человека или животного. Иллюстрированная опора 118 для субъекта включает в себя стационарную часть 120 и подвижную часть 122, которая является подвижной относительно неподвижной части 120. Подвижная часть 122 сконфигурирована, по меньшей мере, для горизонтального движения в область 106 обследования и из нее. Фиг.1A показывает подвижную часть 122 во втянутом положении 101, в котором подвижная часть 122 находится вне области 106 обследования, а Фиг.1B показывает подвижную часть 122 в вытянутом положении 103, в котором часть подвижной части 122 расположена в области 106 обследования. Датчик 124 положения обеспечивает сигнал, указывающий на горизонтальное положение подвижной части 122 относительно области 106 обследования.
Идентификатор 126 положения сканирования облегчает идентификацию по меньшей мере одного из положения начала сканирования или положения конца сканирования для предварительного сканирования и/или диагностического сканирования. Как более подробно описано ниже, в одном случае идентификатор 126 положения сканирования может быть использован для идентификации положения начала и/или конца сканирования на основе расположения субъекта на опоре для субъекта. В одном случае это включает в себя идентификацию положения начала и/или конца сканирования без необходимости перемещения опоры для субъекта к какому-нибудь положению, отмечающему начало сканирования и/или без привязки и/или независимо от расположения подвижной части 122 по отношению к области 106 обследования. Это позволяет технику избежать необходимости выполнения дополнительных, не связанных с визуализацией шагов для определения положения начала и/или конца сканирования, и, следовательно, может упростить рабочий процесс подготовки пациента к исследованию, уменьшить время, в течение которого пациент должен находиться на опоре 118 для пациента и в кабинете обследования, и т.д., и может оптимизировать или повысить точность совпадения сканированного объема с объемом, необходимым для сканирования интересующей ткани, и уменьшить дозу по сравнению с конфигурацией, в которой идентификатор 126 положения сканирования не используется или опущен.
Вычислительная система общего назначения или компьютер служит консолью 128 оператора. Консоль 128 включает в себя различные устройства ввода и вывода, такие как клавиатура, мышь, дисплей и т.д. Консоль включает в себя один или несколько процессоров, которые выполняют машиночитаемые команды, вложенные в или закодированные на машиночитаемых носителях (невременная физическая память), которые позволяют оператору управлять работой системы 100, например, запускать предварительное сканирование и/или диагностическое сканирование на основе начального и/или конечного положения сканирования, определенного с помощью идентификатора 126 положения сканирования, останавливать сканирование, устанавливать параметры протокола и т.д.
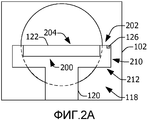
Фиг.2 иллюстрирует пример варианта осуществления идентификатора 126 положения сканирования. Для этого варианта осуществления подвижная часть 122 опоры 118 для субъекта расположена в углублении 200 стационарной части 120, а идентификатор 126 положения сканирования находится на той стороне 202 стационарной части 120, которая, как правило, параллельна и смежна со стороной 204 подвижной части 122, на которой располагался бы субъект для сканирования. Такое расположение обеспечивает технику легкий доступ и хорошую видимость. Как показано на Фиг.2B, идентификатор 126 положения сканирования может перемещаться на заданную длину вдоль стороны 202. В этом варианте осуществления длина меньше, чем полная длина стороны. В других вариантах осуществления длина идентификатора 126 положения сканирования по сравнению со стороной 202 может быть длиннее или короче.
На Фиг.2 идентификатор 126 положения сканирования включает в себя чувствительный к взаимодействию компонент, который сконфигурирован с возможностью формирования сигнала в ответ на взаимодействие с идентификатором 126 положения сканирования. Неограничивающие примеры взаимодействий включают в себя, не ограничиваясь этим, нажатие или физический контакт, например, с пальцем или с другим объектом, нажимающим на идентификатор 126 положения сканирования, тепловое взаимодействие, например, посредством тепла, передающегося между пальцем, касающимся идентификатора 126 положения сканирования, и идентификатором 126 положения сканирования, бесконтактное взаимодействие, такое как распространение волн, индуцированных пальцем, приближающимся к идентификатору 126 положения сканирования, электрические характеристики (например, емкость, индуктивность, сопротивление, ток, напряжение и т.д.) между пальцем и идентификатором 126 положения сканирования, оптические сигналы и т.д. между пальцем и идентификатором 126 положения сканирования, звуковые (например, распознавание голоса) и/или другие взаимодействия.
В качестве неограничивающего примера и как показано на Фиг.2B, после того, как субъект (не показан) был помещен на подвижную часть 122, техник может приблизиться к опоре 118 для пациента и прикоснуться к первой области 206 идентификатора 126 положения сканирования, чтобы идентифицировать начальное положение сканирования и необязательно прикоснуться ко второй области 208 идентификатора 126 положения сканирования, чтобы идентифицировать конечное положение сканирования. После прикосновения к первому положению 206 на идентификаторе 126 положения сканирования формируется первый сигнал, указывающий на относительное местоположение первого положения 206 по отношению к подвижной части 122. Аналогично, при прикосновении ко второй области формируется второй сигнал, указывающий на относительное местоположение второго положения 208 по отношению к подвижной части 122. В обоих случаях подвижная часть 122 может быть расположена произвольно по отношению к стационарному гентри 102 и, следовательно, к области 106 обследования.
Эти сформированные сигналы передаются на консоль 128 (Фиг.1) и/или в другую вычислительную систему, которая может объединять информацию, связанную с выполнением приложения для планирования процесса сканирования, чтобы задать начальное и/или конечное положения сканирования для предварительного сканирования и/или диагностического сканирования. Техник может принять эти положения, например, путем ввода с консоли, показывающего принятие положений, просто начав сканирование, и/или иным образом. Техник также может отклонить одно или несколько положений и/или вручную ввести одно или несколько положений с помощью консоли 128 или через идентификатор 126 положения сканирования, или вручную ввести расстояние вместо конечного положения с помощью консоли 128 или другим способом. Если техник идентифицирует через идентификатор 126 положения сканирования только положение начала сканирования, он может вручную ввести конечное положение или протяженность/длину сканирования с помощью консоли 128.
Для идентификации, изменения и/или отмены идентифицированного положения могут быть использованы различные методики. Например, в одном из вариантов осуществления идентификация положения может вызывать несколько касаний, таких как два касания в одном и том же месте (например, в области 206), одно касание в области 206 и одно касание в другом месте, например, в области проверки и т.д. В другом варианте осуществления техник идентифицирует положение путем нажатия на область 206 в течение определенного периода времени. В другом варианте осуществления техник идентифицирует положение нажатием кнопки, переключением переключателя и т.д. В другом варианте осуществления техник идентифицирует положение, предоставляя голосовую команду (например, "начальное положение") при нажатии на область 206. В другом варианте осуществления техник может коснуться и сдвинуть область 206 в другое место на идентификаторе 126 положения сканирования, чтобы переместить идентифицированную область. В другом варианте осуществления последующее взаимодействие (например, последующее касание) с областью 206 снимает выбор либо отменяет идентифицированную область 206. Приведенные выше примеры дают неограничивающие подходы, и в настоящем документе также рассматриваются другие подходы.
Для информирования техника о идентифицированной области (областях) могут быть использованы различные подходы, такие как визуальная, звуковая, тактильная и/или другая обратная связь через опору 118 для субъекта, стационарный гентри 102, консоль 128 и/или другие компоненты системы 100 и/или компоненты, внешние по отношению к системе 100. Например, в одном случае осветительное устройство (устройства) (например, светоизлучающий диод (LED)) используется для подсветки идентифицированной области. В показанном варианте осуществления это может включать в себя подсветку области 206 и 208 на идентификаторе 126 положения сканирования. Осветительное устройство может быть внутренним и/или внешним по отношению к идентификатору 126 положения сканирования. В другом случае механический компонент, такой как прицел, переключатель, ручка и т.д., используется для обозначения идентифицированной области (областей). В этом случае перемещение прицела, переключателя, ручки и т.д. может идентифицировать область и одновременно обеспечивать технику визуальный маркер посредством его местоположения, состояния (открытый или закрытый), и т.д.
Следует отметить, что идентификатор 126 положения сканирования может дополнительно или альтернативно быть расположен на других сторонах стационарной части 120, например, на стороне 210, которая перпендикулярна стороне 204 и смотрит наружу от опоры 118 для субъекта, на стороне 212 , параллельной стороне 204, но обращенной в противоположном направлении, и/или на другой стороне. Если идентификатор 126 положения сканирования будет расположен дальше и/или в более труднодоступных местах, это может снижать риск случайного контакта (например, с техником, пациентом, оборудованием и т.д.) и/или преднамеренного разрушительного контакта (например, со стороны беспокойного пациента, ребенка, и т.д.). В показанном варианте осуществления идентификатор 126 положения сканирования расположен на обеих сторонах опоры 118 для субъекта. В другом варианте осуществления идентификатор 126 положения сканирования расположен только на одной из сторон. В другом варианте осуществления начальное положение идентифицировано на одной из сторон, а конечное положение находится на другой из сторон.
Для реализации идентификатора 126 положения сканирования могут быть использованы различные подходы. Примеры включают, не ограничиваясь этим, электрические (емкостные, индуктивные, резистивные и т.д.), магнитные, оптические, радиочастотные, преобразовательные и т.д.
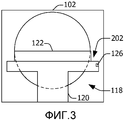
Фиг.3 иллюстрирует вариант осуществления, в котором подвижная часть 122 опоры 118 для субъекта находится по меньшей мере частично над стационарной частью 120, а идентификатор 126 положения сканирования находится на стороне 202 стационарной части 120.
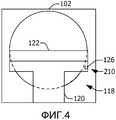
Фиг.4 иллюстрирует вариант осуществления, в котором подвижная часть 122 опоры 118 для субъекта находится по меньшей мере частично над стационарной частью 120, а идентификатор 126 положения сканирования находится на стороне 210 стационарной части 120.
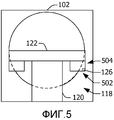
Фиг.5 иллюстрирует вариант осуществления, в котором подвижная часть 122 опоры 118 для субъекта находится по меньшей мере частично над стационарной частью 120, а идентификатор 126 положения сканирования расположен по меньшей мере частично на нижней стороне 502 подвижной части 122 и по меньшей мере частично на стороне 504 подвижной части 122. В этом случае, так как идентификатор 126 положения сканирования расположен на подвижной части 122, по меньшей мере часть идентификатора 126 положения сканирования будет расположена в области 106 обследования во время сканирования. Таким образом, идентификатор 126 положения сканирования может быть изготовлен из материала, который сводит к минимуму любое взаимодействие между идентификатором 126 положения сканирования и пучком излучения, которое может проявляться в восстановленном изображении.
Что касается примерных вариантов осуществления, показанных на Фиг.2-5, идентификатор 126 положения сканирования может быть по меньшей мере частично заключен в материал, такой как мембрана, контейнер или тому подобное. Использование герметичного или непроницаемого для частиц материала и т.п. может защитить идентификатор 126 положения сканирования от частиц, таких как биологические жидкости, пыль и так далее, и/или облегчить чистку, стерилизацию, дезинфекцию и т.д. идентификатора 126 положения сканирования.
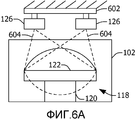
Фиг.6 иллюстрирует вариант осуществления, в котором идентификатор 126 положения сканирования размещен снаружи по отношению к системе 100. Более конкретно, показанный идентификатор 126 положения сканирования соединен с возможностью скольжения с неподвижно прикрепленным, например, к потолку или к другой структуре в кабинете обследования, трактом 602. Идентификатор 126 положения сканирования сконфигурирован для движения вперед и назад по тракту 602, как показано на Фиг.6B. В показанном варианте осуществления идентификатор 126 положения сканирования включает в себя осветительное устройство (устройства), которое испускает луч 604 света, освещающий часть поверхности 204 подвижной части 122 опоры 118 для субъекта.
В процессе работы техник вручную перемещается и выравнивает луч 604 света по отношению к субъекту (не показан) на опоре 118 для пациента, чтобы идентифицировать по меньшей мере одно из начального положения 206 сканирования и, при необходимости, конечного положения 208 сканирования. Аналогично вышеописанному, для принятия, изменения, отмены и т.д. идентифицированного положения могут быть использованы различные подходы. Например, простой сдвиг идентификатора 126 положения сканирования может активировать идентификатор 126 положения сканирования, а последующее оставление идентификатора 126 положения сканирования в новом положении в течение некоторого периода времени может означать принятие идентифицированной области. Последующее перемещение идентификатора 126 положения сканирования может или не может изменить или отменить идентифицированное положение.
В других вариантах осуществления идентификатор 126 положения сканирования может включать в себя один или более компонентов (например, кнопки, переключатели, датчики, рычаги и т.д.) для активации луча 604 света, принятия идентифицированного положения, изменения положения, отмены положения и т.д. В другом варианте осуществления может быть перемещен зафиксированный светоизлучающий объект, или, в качестве альтернативы, может быть перемещен угол проецирования света, чтобы найти начальное и/или конечное положение на основе расстояния, рассчитанного по углу проецирования.
В других вариантах осуществления пульт дистанционного управления включает в себя элементы управления для управления идентификатором 126 положения сканирования, например, для перемещения идентификатора 126 положения сканирования вдоль трактов 602, для остановки идентификатора 126 положения сканирования в конкретном положении, включения и выключения луча 604, и т.д. Пульт дистанционного управления может быть сконфигурирован для связи с идентификатором 126 положения сканирования с помощью проводной и/или беспроводной связи, напрямую и/или через другое устройство (например, консоль 128, гентри 102 и т.д.).
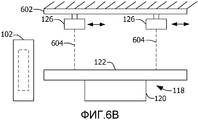
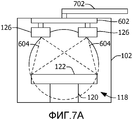
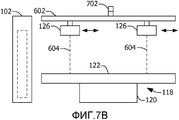
Фиг.7 иллюстрирует вариант осуществления, в котором тракты 602 крепятся к структуре, такой как балка 702, которая может быть установлена на стационарном гентри 102 или на другой структуре, отдельной от системы 100, например, на портативном аппарате с колесами, на стене кабинета и т.д.
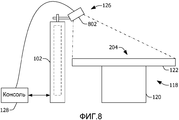
Фиг.8 иллюстрирует примерный вариант осуществления, в котором идентификатор 126 положения сканирования включает в себя датчик изображения 802, такой как камера, видеозаписывающее устройство или им подобное, прикрепленный к стационарному гентри 102 непосредственно или через одну или более деталей (как показано). В другом варианте осуществления идентификатор 126 положения сканирования прикреплен к устройству, отличному от стационарного гентри 102. Датчик изображения 802 настроен на прием информации (например, фото и/или видео) о поверхности 204 подвижной части 122, такой как информация о субъекте на поверхности 204. Показанный идентификатор 126 положения сканирования может воспринимать всю площадь подвижной части 122. В других вариантах осуществления область покрытия может быть больше или меньше. Кроме того, идентификатор 126 положения сканирования может быть прикреплен подвижно так, чтобы идентификатор 126 положения сканирования можно было наклонять, вращать, поворачивать и/или передвигать иным образом, чтобы охватить интересующую область.
Воспринятая информация предоставляется на консоль 128 или другое вычислительное устройство и может быть зарегистрирована с опорой 118 для субъекта, введена в программное обеспечение выполнения планирования сканирования и отображена с помощью монитора или другого устройства в связи с пользовательским интерфейсом планирования сканирования. Оператор может взаимодействовать с программным обеспечением выполнения планирования сканирования, чтобы идентифицировать на основе отображенной информации начальное положение сканирования и необязательно конечное положение сканирования или протяженность сканирования. Оператор может также взаимодействовать с программным обеспечением выполнения планирования сканирования, чтобы изменить и/или отменить идентифицированные начальные и/или конечные положения сканирования. Этот вариант осуществления может уменьшить возможности субъекта на поверхности 204 опоры 118 для субъекта, взаимодействовать с идентификатором 126 положения сканирования. В другом варианте осуществления идентификатор 126 положения сканирования может альтернативно быть прикреплен к опоре 118 для пациента. В другом варианте осуществления используется более одного идентификатора 126 положения сканирования.
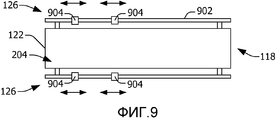
Фиг.9 иллюстрирует пример варианта осуществления, в котором идентификатор 126 положения сканирования включает в себя направляющие 902 и одну или несколько деталей 904, прикрепленных к направляющим 902 с возможностью скольжения. Одна или несколько деталей 904 могут быть использованы для идентификации начального положения сканирования и необязательно конечного положения. Например, в одном варианте осуществления техник сдвигает детали 904 вдоль направляющей 902 до тех пор, пока детали 904 не совместятся с желаемыми положениями начала и конца сканирования. Формируется сигнал, указывающий начальное положение (и конечное положение, если оно идентифицировано), и сканирование будет автоматически использовать начальное положение (и конечное положение) на основе сигнала. Когда конечное положение не идентифицировано, автоматически может быть определена протяженность сканирования, например, на основе выбранного протокола или иначе, либо он может быть вручную определен техником на консоли. Примеры подходящих деталей 904 включают, не ограничиваясь этим, позиционируемые кольца, прицел и тому подобное.
На Фиг.6-9, аналогично Фиг.2-5, идентификатор 126 положения сканирования показан с обеих сторон опоры 118 для субъекта и позволяет идентифицировать как начальное, так и конечное положения. В другом варианте осуществления идентификатор 126 положения сканирования находится только на одной стороне опоры 118 для субъекта. Дополнительно или альтернативно, идентификатор 126 положения сканирования позволяет идентифицировать только одно положение - начальное или конечное. Затем может быть определена протяженность сканирования для идентифицированного начального или конечного положения, что облегчает определение начального положения или конечного положения. В другом варианте осуществления идентификатор 126 положения сканирования расположен по обеим сторонам, и одна сторона используется для идентификации начального положения, в то время как другая сторона используется для идентификации конечного положения.
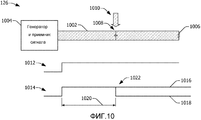
Как кратко обсуждено выше, для реализации идентификатора 126 положения сканирования могут быть использованы различные подходы. Для краткости и в целях пояснения Фиг.10 иллюстрирует вариант осуществления, использующий неограничивающий емкостный подход. Более конкретно, на Фиг.10 идентификатор 126 положения сканирования включает в себя линию передачи с емкостной лентой 1002 или подобное. В показанном варианте осуществления одна оконечная область ленты 1002 электрически связана с генератором и приемником сигнала 1004, а другая оконечная область ленты 1002 электрически замкнута через сопротивление 1006.
В этом варианте осуществления положение 1008 воспринимается посредством отражения линии передачи, когда давление 1010 прикладывается к емкостной ленте 1002, что в этом примере приводит к изменению сопротивления, которое вызывает отражение, и отражение используется для расчета положения. Пример этого показан на сигналах 1012 и 1014. Сигнал 1012 представляет собой сигнал, который видит генератор и приемник сигнала 1004, когда к ленте 1002 не прикасаются. В этом примере сигнал имеет "высокий" уровень. В другом варианте осуществления это состояние может представлять сигнал "низкого" уровня или другой сигнал. Сигнал 1014 показывает изменение 1022 сигнала с высокого 1016 на низкий 1018 при прикладывании давления 1010 к ленте 1002. Время 1020 возвращения отраженной волны соответствует положению нажатия 1010 на ленте 1002, совпадает с местом изменения сигнала и используется для определения положения 1008.
Сигнал, указывающий на позицию 1008, отправляется на консоль и вводится в выполняющееся приложение для сканирования, чтобы обозначить начальное и конечное положение сканирования по длине опоры 118 для субъекта. Положение сканирования указывается оператору на консоли 128, на сенсорной панели стационарного гентри 102, звуковым способом и т.д. Направление сканирования может быть определено по порядку положений нажатий. Длина сканирования может быть настроена путем нажатия вблизи одного из предыдущих выбранных положений, а затем скольжением пальца по длине. Положение будет выделяться, а затем переноситься на графический дисплей в режиме реального времени по мере перемещения пальца. Альтернативным датчиком положения может быть массив ленточных переключателей, расположенных линейно вдоль длины кушетки, и которые могут использовать те же способы выбора положения, которые описаны выше.
Другие подходящие компоненты включают, не ограничиваясь этим, пьезоэлектрические, магнитные, оптические, радиочастотные, механические, электрические и/или другие компоненты.
Фиг.11 иллюстрирует примерный способ. Следует отметить, что порядок нижеописанных действий не является ограничивающим. Таким образом, одно или более действий могут происходить в ином порядке, в том числе одновременно с одним или несколькими действиями. Кроме того, одно или более действий могут быть опущены и/или одно или несколько дополнительных действий могут быть включены.
На этапе 1102 субъект помещается на подвижную часть 122 опоры 118 для субъекта.
На этапе 1104 техник может перемещать подвижную часть 122 в произвольное положение по отношению к области 106 обследования. В другом варианте осуществления техник может оставить подвижную часть 122 там, где она есть.
На этапе 1106 техник идентифицирует начальное положение сканирования путем размещения или выравнивания маркера начала сканирования по отношению к субъекту через идентификатор 126 положения сканирования, как описано в данном документе.
На этапе 1108 формируется сигнал, указывающий на начальное положение, и передается на консоль или другое устройство, используемое для планирования и/или начала сканирования.
На этапе 1110, необязательно, техник идентифицирует конечное положение сканирования путем размещения или выравнивания маркера конца сканирования по отношению к субъекту через идентификатор 126 положения сканирования, как описано в данном документе.
На этапе 1112, в том случае, если идентифицируется конечное положение, формируется сигнал, указывающий на конечное положение, и передается на консоль или другое устройство, используемое для планирования и/или начала сканирования.
На этапе 1114 инициируется сканирование с использованием по меньшей мере сигнала, указывающего начальное положение сканирования. Если конечное положение сканирования идентифицировано, для установки конечного положения сканирования может быть использован соответствующий сигнал. В качестве альтернативы протяженность сканирования может быть идентифицирована автоматически или вручную техником.
Как описано в данном документе, в одном варианте осуществления начальное и/или конечное положения и/или протяженность сканирования могут быть подтверждены или проверены техником. Более того, начальное положение, конечное положение и/или протяженность сканирования могут быть изменены, отменены и т.д. Кроме того, может быть выдано визуальное и/или звуковое уведомление (например, предупреждение), если протяженность сканирования является слишком большой или слишком маленькой, например, на основе сравнения с пороговым размером протяженности сканирования для данного протокола. Дополнительно может быть выдано визуальное и/или звуковое уведомление, если есть какие-либо изменения в начальном/конечном положении, включая изменения. Более того, начальное и/или конечное положения могут быть заблокированы на консоли или при начале сканирования, что может гарантировать, что они не изменятся или не будут сброшены во время сканирования.
В вышеприведенных вариантах осуществления идентификатор 126 положения сканирования описан в связи со сканером КТ. Однако следует понимать, что идентификатор 126 положения сканирования может быть использован с другими методами визуализации, такими как PET, SPECT, MRI, US, мультимодальные сканеры, системы визуализации, где пациент находится на опоре для пациента, которая передвигается в область обследования, и/или другие системы визуализации.
Следует отметить, что опору 118 для субъекта может также использоваться для других приложений, включая, но не ограничиваясь этим, позиционирование пациента вне магнита для сканирования в связи с системой визуализации MRI. Пример подходящего позиционирования пациента вне магнита для сканирования описан в патентной заявке №11/914,951 под названием "Off-Magnet Patient Scan Positioning", поданной 20 ноября 2007 г., которая включена в данный документ в качестве ссылки в полном объеме.
Изобретение было описано в данном документе со ссылкой на различные варианты осуществления. После прочтения описания могут возникнуть модификации и изменения в вариантах осуществления. Предполагается, что изобретение должно быть истолковано как включающее все такие модификации и изменения постольку, поскольку они входят в объем прилагаемой формулы изобретения или ее эквивалентов.
Claims (15)
1. Опора (118) для субъекта, подлежащего сканированию системой (100) визуализации, содержащая:
подвижную часть (122), которая включает в себя поверхность (204), на которой помещается субъект, и которая сконфигурирована с возможностью двигаться в область обследования системы визуализации, где субъект должен сканироваться; и
идентификатор (126) положения сканирования, который формирует сигнал, указывающий по меньшей мере одно из начального положения сканирования или конечного положения сканирования для заранее заданной интересующей области субъекта на основе расположения интересующей области на подвижной части опоры для субъекта для произвольного относительного положения подвижной части по отношению к области обследования, причем идентификатор положения сканирования включает в себя линию передачи с емкостной лентой.
подвижную часть (122), которая включает в себя поверхность (204), на которой помещается субъект, и которая сконфигурирована с возможностью двигаться в область обследования системы визуализации, где субъект должен сканироваться; и
идентификатор (126) положения сканирования, который формирует сигнал, указывающий по меньшей мере одно из начального положения сканирования или конечного положения сканирования для заранее заданной интересующей области субъекта на основе расположения интересующей области на подвижной части опоры для субъекта для произвольного относительного положения подвижной части по отношению к области обследования, причем идентификатор положения сканирования включает в себя линию передачи с емкостной лентой.
2. Опора для субъекта по п. 1, причем идентификатор положения сканирования формирует сигнал независимо от положения подвижной части относительно области обследования.
3. Опора для субъекта по любому из пп. 1 или 2, причем идентификатор положения сканирования обеспечивает подвижный маркер положения, который перемещается к субъекту для идентификации по меньшей мере одного из начального положения сканирования или конечного положения сканирования.
4. Опора для субъекта по п. 1 или 2, причем сигнал задает по меньшей мере одно из первоначального положения начала сканирования или начального положения конца сканирования для по меньшей мере одного из предварительного или диагностического сканирований.
5. Опора для субъекта по п. 1 или 2, причем идентификатор положения сканирования прикреплен к подвижной части.
6. Опора для субъекта по п. 1 или 2, дополнительно содержащая:
неподвижную часть (120), причем подвижная часть прикреплена к неподвижной части с возможностью сдвига, и в которой идентификатор положения сканирования прикреплен к неподвижной части.
неподвижную часть (120), причем подвижная часть прикреплена к неподвижной части с возможностью сдвига, и в которой идентификатор положения сканирования прикреплен к неподвижной части.
7. Опора для субъекта по п. 1 или 2, причем идентификатор положения сканирования находится снаружи по отношению к опоре для пациента.
8. Опора для субъекта по п. 1 или 2, причем идентификатор положения сканирования включает в себя датчик изображения, который воспринимает неподвижное изображение или видеоизображение положения субъекта по отношению к подвижной части.
9. Опора для субъекта по п. 8, причем по меньшей мере одно из начального положения сканирования или конечного положения сканирования идентифицируется с помощью неподвижного изображения или видеоизображения.
10. Опора для субъекта по п. 1 или 2, причем идентификатор положения сканирования включает в себя чувствительный к прикосновению материал, который формирует сигнал, указывающий прикосновение, соответствующее по меньшей мере одному из положения начала сканирования или положения конца сканирования.
11. Опора для субъекта по п. 10, причем прикосновение к чувствительному к прикосновению материалу для идентификации по меньшей мере одного из положения начала сканирования или положения конца сканирования вызывает изменение электрической характеристики чувствительного к прикосновению материала, а сигнал указывает изменение электрической характеристики
12. Опора для субъекта по п. 11, причем электрическая характеристика включает в себя по меньшей мере одно из: импеданса, емкости, сопротивления, напряжения или тока.
13. Опора для субъекта по п. 11, причем по меньшей мере одно из положения начала сканирования или положения конца сканирования определяется на основе изменения состояния сигнала.
14. Опора для субъекта по п. 1 или 2, причем идентификатор положения сканирования включает в себя компонент обратной связи, который обеспечивает по меньшей мере одно из визуальной, звуковой или тактильной обратной связи, соответствующей по меньшей мере одному из положения начала сканирования или положения конца сканирования.
15. Способ создания плана сканирования для субъекта, подлежащего сканированию системой (100) визуализации, содержащий этапы:
формирование, с помощью линии передачи с емкостной лентой, первого сигнала, указывающего одно из начального положения сканирования или конечного положения сканирования, посредством приведения в действие части упомянутой ленты, совмещенной с первой представляющей интерес областью субъекта, помещенного на подвижную часть опоры для субъекта, независимо от расположения подвижной части по отношению к области обследования, в которой сканируется представляющая интерес область; и
создание плана сканирования с по меньшей мере одним из положения начала сканирования или положения конца сканирования, на основе первого сигнала.
формирование, с помощью линии передачи с емкостной лентой, первого сигнала, указывающего одно из начального положения сканирования или конечного положения сканирования, посредством приведения в действие части упомянутой ленты, совмещенной с первой представляющей интерес областью субъекта, помещенного на подвижную часть опоры для субъекта, независимо от расположения подвижной части по отношению к области обследования, в которой сканируется представляющая интерес область; и
создание плана сканирования с по меньшей мере одним из положения начала сканирования или положения конца сканирования, на основе первого сигнала.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US37400910P | 2010-08-16 | 2010-08-16 | |
| US61/374,009 | 2010-08-16 | ||
| PCT/IB2011/053570 WO2012023088A1 (en) | 2010-08-16 | 2011-08-10 | Scan start and/or end position identifier |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2013111842A RU2013111842A (ru) | 2014-09-27 |
| RU2570958C2 true RU2570958C2 (ru) | 2015-12-20 |
Family
ID=44645758
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2013111842/14A RU2570958C2 (ru) | 2010-08-16 | 2011-08-10 | Идентификатор положения начала и/или конца сканирования |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US8995611B2 (ru) |
| EP (1) | EP2605704A1 (ru) |
| CN (1) | CN103079470B (ru) |
| BR (1) | BR112013003337A8 (ru) |
| IN (1) | IN2013CN01309A (ru) |
| RU (1) | RU2570958C2 (ru) |
| WO (1) | WO2012023088A1 (ru) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102012216850B3 (de) * | 2012-09-20 | 2014-02-13 | Siemens Aktiengesellschaft | Verfahren zur Planungsunterstützung und Computertomographiegerät |
| CN103767722B (zh) * | 2012-10-25 | 2016-04-27 | 上海联影医疗科技有限公司 | Ct或pet-ct系统及其进行扫描的定位方法 |
| CN108324311B (zh) * | 2013-01-31 | 2022-02-11 | Ge医疗系统环球技术有限公司 | 患者身体外形自动检测和患者智能定位 |
| CN103494613B (zh) * | 2013-09-06 | 2015-10-14 | 沈阳东软医疗系统有限公司 | 一种平片扫描方法及装置 |
| DE102013220665A1 (de) | 2013-10-14 | 2015-04-16 | Siemens Aktiengesellschaft | Bestimmung eines Werts eines Aufnahmeparameters mittels einer anatomischen Landmarke |
| DE102013226242A1 (de) * | 2013-12-17 | 2015-06-18 | Siemens Aktiengesellschaft | Einstellung eines Aufnahmebereichs |
| DE202014008084U1 (de) | 2014-10-07 | 2014-11-05 | Siemens Aktiengesellschaft | Medizinisches Gerät aufweisend wenigstens eine streifenförmige, berührungsempfindliche Eingabevorrichtung |
| US10313487B2 (en) * | 2015-03-27 | 2019-06-04 | Qualcomm Incorporated | Support of location services using a positioning protocol |
| EP3224801B1 (en) * | 2015-08-07 | 2021-12-15 | Shanghai United Imaging Healthcare Co., Ltd. | Multi-modality imaging system and method |
| CN106821408B (zh) * | 2017-01-04 | 2020-07-10 | 东软医疗系统股份有限公司 | 一种扫描方法及装置 |
| CN108634975A (zh) * | 2018-04-26 | 2018-10-12 | 沈阳东软医疗系统有限公司 | 扫描定位方法和装置 |
| WO2019228359A1 (en) * | 2018-05-28 | 2019-12-05 | Shanghai United Imaging Healthcare Co., Ltd. | Systems and methods for taking x-ray images |
| CN108720859A (zh) * | 2018-07-09 | 2018-11-02 | 杭州美诺瓦医疗科技股份有限公司 | 散射低剂量x射线的骨龄测试仪器 |
| EP3834717B1 (de) * | 2019-12-11 | 2024-09-18 | Siemens Healthineers AG | Verfahren zu einem positionieren eines patienten |
| CN113081014B (zh) | 2021-03-19 | 2023-05-30 | 东软医疗系统股份有限公司 | 定位片扫描方法、装置及系统 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2085120C1 (ru) * | 1994-02-22 | 1997-07-27 | Производственно-коммерческая фирма товарищества с ограниченной ответственностью "Герма" | Стол пациента |
| WO2006126108A1 (en) * | 2005-05-25 | 2006-11-30 | Koninklijke Philips Electronics N.V. | Off-magnet patient scan positioning |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5149918A (en) * | 1990-10-29 | 1992-09-22 | International Business Machines Corporation | Touch sensitive overlay |
| US6078315A (en) * | 1997-11-03 | 2000-06-20 | Microtouch System Inc. | Touch panel using acoustic wave reflection |
| US6137282A (en) * | 1998-06-25 | 2000-10-24 | Becs Technology, Inc. | Time-domain reflectometry user input device |
| DE19947328B4 (de) | 1999-10-01 | 2006-06-14 | Siemens Ag | Bildgebendes medizinisches Diagnosegerät |
| US7072501B2 (en) * | 2000-11-22 | 2006-07-04 | R2 Technology, Inc. | Graphical user interface for display of anatomical information |
| DE10109219B4 (de) | 2001-02-26 | 2005-07-07 | Siemens Ag | Positioniereinrichtung für bildgebende Diagnosesysteme |
| DE10232676B4 (de) * | 2002-07-18 | 2006-01-19 | Siemens Ag | Verfahren und Vorrichtung zur Positionierung eines Patienten in einem medizinischen Diagnose- oder Therapiegerät |
| DE102004039683A1 (de) * | 2004-08-16 | 2006-03-09 | Siemens Ag | Verfahren und Vorrichtung zur Einstellung eines Scanbereichs bei einem Tomographen |
| US7639782B2 (en) * | 2005-08-23 | 2009-12-29 | Ge Medical Systems Israel, Ltd. | Methods and systems for automatic patient table positioning |
| DE102006033500B4 (de) | 2006-07-19 | 2009-02-05 | Siemens Ag | Verfahren zur Positionierung einer Patientenliege sowie Patientenpositioniervorrichtung |
| US8581852B2 (en) * | 2007-11-15 | 2013-11-12 | Microsoft Corporation | Fingertip detection for camera based multi-touch systems |
| TWI533184B (zh) * | 2008-10-08 | 2016-05-11 | 禾瑞亞科技股份有限公司 | 辨別觸碰之觸控方法及裝置 |
| CN201465057U (zh) * | 2009-05-25 | 2010-05-12 | 汉王科技股份有限公司 | 基于可变电容的坐标获取装置 |
-
2011
- 2011-08-10 CN CN201180039504.9A patent/CN103079470B/zh active Active
- 2011-08-10 RU RU2013111842/14A patent/RU2570958C2/ru active
- 2011-08-10 US US13/816,576 patent/US8995611B2/en active Active
- 2011-08-10 BR BR112013003337A patent/BR112013003337A8/pt not_active Application Discontinuation
- 2011-08-10 EP EP11755446.9A patent/EP2605704A1/en not_active Ceased
- 2011-08-10 IN IN1309CHN2013 patent/IN2013CN01309A/en unknown
- 2011-08-10 WO PCT/IB2011/053570 patent/WO2012023088A1/en active Application Filing
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2085120C1 (ru) * | 1994-02-22 | 1997-07-27 | Производственно-коммерческая фирма товарищества с ограниченной ответственностью "Герма" | Стол пациента |
| WO2006126108A1 (en) * | 2005-05-25 | 2006-11-30 | Koninklijke Philips Electronics N.V. | Off-magnet patient scan positioning |
Also Published As
| Publication number | Publication date |
|---|---|
| CN103079470A (zh) | 2013-05-01 |
| RU2013111842A (ru) | 2014-09-27 |
| US20130148778A1 (en) | 2013-06-13 |
| IN2013CN01309A (ru) | 2015-07-31 |
| WO2012023088A1 (en) | 2012-02-23 |
| BR112013003337A2 (pt) | 2017-10-24 |
| EP2605704A1 (en) | 2013-06-26 |
| CN103079470B (zh) | 2016-02-10 |
| BR112013003337A8 (pt) | 2018-02-06 |
| US8995611B2 (en) | 2015-03-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2570958C2 (ru) | Идентификатор положения начала и/или конца сканирования | |
| US7787929B2 (en) | Control system for medical equipment | |
| CN109069131B (zh) | 用于乳腺组织成像的超声系统和方法 | |
| US10737117B2 (en) | Medical apparatus and method | |
| JP4484462B2 (ja) | 医療用診断または治療装置における患者の位置決め方法および装置 | |
| JP6809888B2 (ja) | マンモグラフィ装置 | |
| US20230103969A1 (en) | Systems and methods for correlating regions of interest in multiple imaging modalities | |
| US7308075B2 (en) | Method and apparatus for adjusting a scanning region in a computed tomography system | |
| US20120101388A1 (en) | System for Locating Anatomical Objects in Ultrasound Imaging | |
| EP2584968A1 (en) | Medical tomosynthesis system | |
| JP2001245880A (ja) | 医療器具の位置判定方法 | |
| US9720512B2 (en) | Device and method for the gesture-controlled setting of setting variables on an X-ray source | |
| CN204428155U (zh) | 用于重新定位移动式成像设备的图像采集单元 | |
| JP2013521032A (ja) | 医療用検査および/または治療装置 | |
| JP6659560B2 (ja) | 介入手順のためのレジストレーション装置及びその作動方法 | |
| JP2010060428A (ja) | 放射線撮像装置 | |
| JP2024529987A (ja) | 改善された撮像システムおよび方法 | |
| JP6714097B2 (ja) | マルチモーダルx線撮像における光学カメラ選択 | |
| KR101923183B1 (ko) | 의료 영상 표시 방법 및 의료 영상 표시 장치 | |
| US20180070882A1 (en) | Method, medical imaging apparatus and mobile terminal for planning and/or controlling a medical imaging examination | |
| US20200008785A1 (en) | Ultrasound imaging apparatus and control method thereof | |
| CN110101404B (zh) | 一种pet-ct系统及其控制方法 | |
| KR101167249B1 (ko) | 초음파 진단 장치 및 그 제어 방법 | |
| EP3991637A1 (en) | Providing scan progress indications during medical imaging | |
| JP2015116409A (ja) | X線ct装置 |