RU2468944C2 - Устройство управления для дисплея парковочного устройства и способ отображения - Google Patents
Устройство управления для дисплея парковочного устройства и способ отображения Download PDFInfo
- Publication number
- RU2468944C2 RU2468944C2 RU2010115965/11A RU2010115965A RU2468944C2 RU 2468944 C2 RU2468944 C2 RU 2468944C2 RU 2010115965/11 A RU2010115965/11 A RU 2010115965/11A RU 2010115965 A RU2010115965 A RU 2010115965A RU 2468944 C2 RU2468944 C2 RU 2468944C2
- Authority
- RU
- Russia
- Prior art keywords
- parking space
- vehicle
- border
- display
- control device
- Prior art date
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/027—Parking aids, e.g. instruction means
- B62D15/028—Guided parking by providing commands to the driver, e.g. acoustically or optically
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q9/00—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling
- B60Q9/002—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling for parking purposes, e.g. for warning the driver that his vehicle has contacted or is about to contact an obstacle
- B60Q9/004—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling for parking purposes, e.g. for warning the driver that his vehicle has contacted or is about to contact an obstacle using wave sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/027—Parking aids, e.g. instruction means
- B62D15/0275—Parking aids, e.g. instruction means by overlaying a vehicle path based on present steering angle over an image without processing that image
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/10—Automatic or semi-automatic parking aid systems
Abstract
Группа изобретений относится к области поддержки процесса парковки транспортных средств. Устройство (10) управления для дисплея (14) парковочного устройства содержит интерфейс (19) для сопряжения с первым измерительным устройством (11), предназначенным для измерения парковочного пространства (41) при проезде мимо этого парковочного пространства (41) сбоку от него. Интерфейс (17, 18) служит для сопряжения со вторым измерительным устройством (3, 5), предназначенным для регистрации положения передней и/или задней границы парковочного пространства при въезде в парковочное пространство. Интерфейс (50) обеспечивает сопряжение с дисплеем (14), предназначенным для отображения размеров парковочного пространства (41). Изображение передней границы (42) и/или задней границы (44) парковочного пространства (41), полученное посредством первого измерительного устройства (11), отличается от изображения передней (42') и/или задней (44') границы парковочного пространства (41), полученного посредством второго измерительного устройства (3, 5). Группа изобретений позволяет водителю транспортного средства получать непосредственное представление о том, насколько надежны полученные данные о границах парковочного пространства. 2 н. и 5 з.п. ф-лы, 5 ил.
Description
Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству управления для дисплея парковочного устройства и к способу отображения передней и/или задней границ парковочного пространства.
Уровень техники
Из DE 10354661 А1 известно устройство для полуавтоматической поддержки процесса парковки транспортных средств. При проезде мимо парковочного пространства определяется величина парковочного пространства. На основании этого водителю транспортного средства сообщаются сведения и/или инструкции относительно процесса парковки, причем вычислительный блок задает - на основе измеренных размеров парковочного пространства - траекторию парковочного маневра для въезда в это парковочное пространство. Если на основании заданной траектории парковочного маневра транспортное средство по меньшей мере частично заехало в парковочное пространство, осуществляется повторная оценка ориентации транспортного средства относительно парковочного пространства и зазоров для маневрирования перед транспортным средством и позади него, чтобы в случае необходимости задать траекторию дополнительного парковочного маневра.
Раскрытие изобретения
Предлагаемое в изобретении устройство управления, охарактеризованное в соответствующем независимом пункте формулы изобретения, имеет по сравнению с известным решением то преимущество, что водитель получает информацию о том, каким образом определяются передняя или задняя границы парковочного пространства. Когда транспортное средство проезжает мимо парковочного пространства, оно обычно движется, по крайней мере в жилых зонах или на автостоянках, с обычной для движения скоростью. Поскольку транспортное средство находится в движении, это может привести к неточности в определении размеров парковочного пространства. В частности, при проезде мимо парковочного пространства трудно определить с точностью положение ее передней и задней границ. Наряду со скоростью, здесь необходимо учитывать угол падения луча измерительного устройства, проходящего приблизительно сбоку относительно передней и задней границ парковочного пространства. При наличии дополнительной измерительной системы, в частности задействуемой после начала парковочного маневрирования, можно точнее определить местонахождение передней и задней границ парковочного пространства. Если необходимо, увеличивается количество датчиков или время измерения. Кроме того, во время парковки транспортное средство движется, как правило, медленнее. Если водитель информируется о том, посредством какой измерительной системы осуществляется определение положение границ парковочного пространства, он может получить непосредственное представление о том, насколько надежны полученные данные об этих границах. При наличии более точного результата измерений водитель может чувствовать себя более уверенно в ходе парковки. В отсутствие более точной измерительной системы, например из-за сложных условий для измерения или по причине неисправности измерительной системы, водитель также может осознавать это и сам будет вести себя более осторожно в ходе парковки. При наличии автоматической парковочной системы водитель может, в случае необходимости и в дополнение к автоматическому управлению, внимательно контролировать процесс парковки в парковочном пространстве.
Технические решения, приведенные в зависимых пунктах формулы изобретения, обеспечивают возможность усовершенствования и улучшения устройства управления, указанного в независимом пункте формулы изобретения. Так, размеры парковочного пространства предпочтительно отображать при взгляде "с высоты птичьего полета", поскольку в этом случае размеры парковочного пространства воспринимаются водителем легко и интуитивно понятно.
Далее, в предпочтительном варианте устройство управления выполнено с возможностью расчета пути движения транспортного средства от его фактического положения до заданного конечного положения в пределах парковочного пространства. Благодаря этому возможно, с одной стороны, не только предоставить водителю информацию о размерах парковочного пространства, но и дополнительно выполнить проводку его транспортного средства в это пространство. Это может быть осуществлено, с одной стороны, с помощью выдачи инструкций и, с другой стороны, автоматического воздействия на трансмиссию и/или рулевой механизм транспортного средства, так что последнее частично или полностью автоматическим образом заводится в парковочное пространство посредством управления его тормозной системой, приводом и/или рулевым механизмом.
Для усиления впечатления о надежно работающей системе в предпочтительном варианте предусмотрено отображение на дисплее заданного конечного положения транспортного средства.
Для повышения уверенности водителя в предпочтительном варианте предусмотрено сигнальное устройство, предупреждающее водителя об уменьшении расстояния до передней и/или задней границы парковочного пространства ниже порогового.
Соответствующие преимущества достигаются и в предлагаемом в изобретении способе отображения передней и/или задней границ парковочного пространства. Особенно предпочтительное и интуитивно понятное изображение достигается в том случае, если граница парковочного пространства изображается в виде линии, толщина и/или цвет которой выбираются в зависимости от того, посредством какой измерительной системы или каких измерительных систем осуществляется обнаружение передней или задней границы парковочного пространства. В случае необходимости можно также предусмотреть в одном из вариантов осуществления планку ("усы") погрешностей обнаружения таким образом, что величина планки будет оказывать влияние на толщину линии в изображении границ парковочного пространства.
Краткое описание чертежей
Примеры осуществления настоящего изобретения иллюстрируются чертежами и подробнее поясняются в приведенном ниже описании.
На чертежах показано:
на фиг.1 - схематическое изображение транспортного средства с предлагаемым в изобретении устройством управления,
на фиг.2 - вариант осуществления изобретения на примере пути транспортного средства из исходного положения в конечное положение в парковочном пространстве с использованием предлагаемого в изобретении способа,
на фиг.3-5 - последовательность реализации способа отображения передней и/или задней границы парковочного пространства транспортного средства, расположенной сбоку от потока дорожного движения.
Осуществление изобретения
Предлагаемое в изобретении устройство управления в предпочтительном варианте устанавливается на транспортных средствах, участвующих в дорожном движении и паркующихся в парковочных пространствах (на свободных местах для парковки) с помощью вспомогательных средств. Предлагаемый в изобретении способ применим к парковочным пространствам, расположенным как поперек протяженности проезжей части, так и, в особенности, параллельно ей, где парковка, как правило, более сложна, чем при въезде в поперечно расположенные парковочные пространства.
На фиг.1 схематически представлено транспортное средство 1. В передней части 2 транспортного средства 1 расположены датчики 3 расстояния, предназначенные для измерения расстояния до препятствия. Датчики 3 расстояния могут быть, например, радарными или оптическими. В частности, датчики 3 расстояния могут быть и ультразвуковыми датчиками, посылающими ультразвуковой сигнал, принимающими отраженный ультразвуковой сигнал и позволяющими определить расстояние до препятствия перед транспортным средством 1 на основе времени прохождения ультразвукового сигнала с учетом скорости звука. Данные датчиков 3 расстояния обрабатываются и оцениваются устройством 10 управления, куда они поступают через интерфейс 17. Кроме того, к устройству 10 управления подсоединены через интерфейс 18 расположенные в задней части 4 транспортного средства датчики 5, которые в предпочтительном варианте измеряют, аналогично датчикам 3 расстояния, расстояние до препятствия, находящегося позади транспортного средства 1.
Далее, через интерфейс 19 устройство 10 управления связано с ориентированным вбок датчиком 11 расстояния, измеряющим расстояние до препятствий с правой стороны 6 транспортного средства. Данные о расстояниях коррелируются с данными об отрезке пути, пройденном транспортным средством и измеряемом датчиком 7 пройденного пути. Благодаря этому можно скоррелировать положение препятствий, находящихся рядом с транспортирующим средством с его правой стороны 6, с пройденным отрезком пути, таким образом получив изображение обстановки с правой стороны 6 транспортного средства 1 применительно к фактическому положению последнего. Для оценки окружающей обстановки устройство 10 управления содержит вычислительный блок 8. В одном из вариантов осуществления изобретения предусмотрена дополнительная возможность оценки угла поворота руля транспортного средства посредством датчика 9 угла поворота, что позволяет наряду с пройденным отрезком пути учитывать и углы выполненных поворотов.
В примере осуществления изобретения, представленном на фиг.1, показано использование бокового датчика 11 расстояния. Вместе с тем, на правой стороне 6 транспортного средства может быть установлено и несколько датчиков расстояния. Соответственно, в дополнение к датчикам расстояния на правой стороне или вместо них можно также предусмотреть датчики расстояния на левой стороне 16 транспортного средства.
Все датчики 3, 5, 11 расстояния могут быть выполнены как принципиально одинаковые измерительные системы. Поскольку, однако, при измерениях преследуются различные цели - при боковых измерениях требуется быстро измерить контуры парковочного пространства, а при измерениях с передней 2 и задней 4 сторон транспортного средства необходима, в частности, точная оценка расстояния, - то могут использоваться как различные измерительные программы, так и различные измерительные устройства, например радарные и ультразвуковые.
Устройство 10 управления проверяет возможное парковочное пространство в непосредственной близости от транспортного средства путем сравнения его с параметрами транспортного средства 1, заложенными в запоминающее устройство 12, на предмет того, подходит ли это пространство для парковки транспортного средства 1. Для этого длина и ширина сравниваются с зарегистрированными размерами парковочного пространства. Если данное пространство подходит для парковки, то водителю транспортного средства через динамик 13 и/или дисплей 14 выдаются инструкции по маневрированию, следуя которым водитель может завести транспортное средство 1 из его фактического положения в найденное парковочное пространство. Устройство 10 управления связано с дисплеем 14 через интерфейс 50, а с динамиком 13 - через интерфейс 51. При приближении транспортного средства 1 к границе парковочного пространства водителю может быть выдано предупреждение об этом через динамик 13 и/или дисплей 14.
Вместе с тем, в другом варианте осуществления изобретения информация по управлению может также передаваться из устройства 10 управления (в предпочтительном варианте через шину 15 данных) на органы управления транспортного средства, чтобы вывести транспортное средство в парковочное пространство в по меньшей мере частично или полностью автоматическом режиме. Так, автоматически может осуществляться - посредством устройства 10 управления и в предпочтительном варианте через шину 15 данных - управление ускорением, торможением и/или поворотом транспортного средства.
Для информирования водителя в процессе движения управляемого им или управляемого по меньшей мере полуавтоматически транспортного средства в парковочное пространство на дисплее 14 осуществляется по меньшей мере схематическое отображение размеров этого парковочного пространства. Это отображение возможно при взгляде "с высоты птичьего полета", когда обстановка вокруг транспортного средства показана в виде сверху или в косой проекции. При этом, в частности, дополнительно к представлению размеров парковочного пространства, например схематическому представлению, на дисплее 14 отображается положение транспортного средства в парковочном пространстве, а в другом варианте осуществления изобретения - и заданное конечное положение транспортного средства.
Способ отображения парковочного пространства на дисплее 14 определяется вычислительным блоком 8. В соответствии с изобретением способы отображения границ парковочного пространства различаются в отношении того, были ли значения расстояния, необходимые для определения размеров парковочного пространства, зарегистрированы только датчиком 11 расстояния или же для определения положения границ парковочного пространства в распоряжении дополнительно имеются данные от датчиков 3 и/или 5 расстояния.
Способ парковки поясняется с помощью фиг.2, где транспортное средство 1 с предлагаемым в изобретении устройством 10 управления въезжает в парковочное пространство. На фиг.2 изображено транспортное средство 1, едущее по улице 20 параллельно ее краю 21. Боковой датчик 11 расстояния активирован и посылает в поле 22 его зрения сигнал, который в первом положении 23 транспортного средства, представленном на чертеже положением середины его задней оси, излучается в направлении припаркованного на улице второго транспортного средства 24. Транспортное средство 1 проходит по улице 20 отрезок пути 25. В свободной зоне 26 в поле 22 зрения датчика не попадает ни одно препятствие вплоть до боковой границы 21 улицы, например края бордюрного камня тротуара. При дальнейшем продвижении вперед сигнал в поле зрения датчика попадает на цветочные кадки 27, ограничивающие свободную зону 26 спереди.
Ввиду наличия скорости движения транспортного средства мимо парковочного пространства и угла раскрыва обращенного в сторону поля зрения датчика в рассматриваемом случае положение передней 31 и задней 32 границ свободной зоны 26 определяется с небольшой неточностью. Передняя граница 31 слегка накладывается на цветочную кадку 27. Задняя граница 32 отстоит на сравнительно большое расстояние от транспортного средства 24. Поскольку свободная зона 26 рассматривается как достаточно большое парковочное пространство, транспортное средство останавливается во втором положении 28 и водителю поступает инструкция повернуть руль вправо. В альтернативном варианте поворот управляемых колес осуществляется автоматически.
Теперь для въезда в парковочное пространство водитель движется задним ходом по траектории 29. Если транспортное средство въехало в парковочное пространство достаточно далеко, например до третьего положения 30, появляется возможность обнаружения задней границы 32 парковочного пространства задними датчиками 5 расстояния транспортного средства 1. Если задняя граница 32 обнаружена, то изображение задней границы на дисплее изменяется по сравнению с предшествующим, когда измерение парковочного пространства производилось только по меньшей мере одним боковым датчиком на транспортном средстве. Так, например, изменяется изображение линии, или на дисплее, где препятствие и свободная зона парковочного пространства различались исключительно цветами, появляется линия, обозначающая положение задней границы парковочного пространства. Если новое положение не совпадает с ранее определенным, то в предпочтительном варианте в измененном изображении задней границы парковочного пространства на дисплее отображается вновь определенное положение. В рассматриваемом примере осуществления коррекция положения обозначения задней границы парковочного пространства осуществляется в направлении, указываемом стрелкой 33.
Если транспортное средство заехало в парковочное пространство еще дальше, посредством передних датчиков 3 расстояния на транспортном средстве 1 можно также повторно измерить положение передней границы 31 парковочного пространства. При этом соответственно происходит изменение изображения, показывающего положение передней границы парковочного пространства, по сравнению с изображением для случая, когда данные поступали только посредством датчика 11. По достижении транспортным средством четвертого положения 34 водителю может быть также показано скорректированное положение передней границы 31 парковочного пространства, при этом коррекция положения осуществляется соответственно в направлении, указываемом стрелкой 36.
Теперь водитель может принять решение, необходимо ли выполнить точную коррекцию положения транспортного средства в пределах теперь уже практически точно изображенного парковочного пространства. При этом из полученного изображения он может уяснить, что в его распоряжении теперь имеются не только размеры парковочного пространства, полученные посредством датчика 11 расстояния, но и более точные результаты, полученные с помощью передних датчиков 3 расстояния и задних датчиков 5 расстояния.
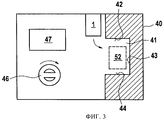
На фиг.3-5 представлены примеры изображений, формируемых на дисплее 14 для отображения размеров парковочного пространства. На фиг.3 показан экран 40 дисплея 14. Транспортное средство 1 показано относительно схематически изображенного парковочного пространства 41. Парковочное пространство 41 ограничено передней 42, боковой 43 и задней 44 границами. Показанные положения границ парковочного пространства основаны на измерениях, полученных при проезде транспортного средства 1 мимо парковочного пространства, и поэтому изображаются тонкими линиями. Кроме того, в данном случае существует возможность получения изображения, где проезжая зона отличается от непроезжей исключительно только цветом. На фиг.3 это показано посредством штриховки непроезжей зоны. В другом варианте осуществления может, кроме того, указываться направление движения транспортного средства 1 посредством стрелки 45. Далее, в еще одном варианте осуществления возможен также, в качестве альтернативы или дополнения, вывод на экран символа 46 рулевого колеса со стрелкой, указывающей направление вращения руля. Прочая информация может быть представлена, например, в текстовом окне 47. Направления движения могут отображаться и в случае автоматической системы, чтобы водитель знал, в каком направлении будет автоматически производиться вращение руля. В случае необходимости возможен также вывод на экран предупреждения, чтобы водитель не трогал рулевое колесо.
В одном из вариантов осуществления изобретения возможно также изображение на экране 40 заданного конечного положения 52 транспортного средства. На фиг.3 это конечное положение 52 показано пунктиром.
На фиг.4 представлено изображение третьего положения 30 в соответствии с процессом, пояснявшимся выше со ссылкой на фиг.2. Транспортное средство 1 частично въехало в парковочное пространство 41. Угол положения транспортного средства и расстояние от него до задней границы парковочного пространства в этом третьем положении обеспечивают возможность измерения расстояния и задними датчиками расстояния. При необходимости на экране осуществляется коррекция положения задней границы парковочного пространства относительно транспортного средства 1. В частности, теперь изображение задней границы парковочного пространства выглядит как граница 44', отличающаяся от границы 44 на фиг.3. Благодаря изменившемуся изображению водитель может теперь уяснить, что в его распоряжении имеются не только результаты измерения, полученные боковым датчиком 11 расстояния, как это видно на фиг.3, а в соответствии с изменившимся изображением задней границы парковочного пространства (фиг.4) задними датчиками расстояния дополнительно выполнена проверка положения задней границы парковочного пространства. В другом варианте осуществления изобретения дополнительно к этому на экран может быть выведен символ 49 рулевого колеса, указывающий водителю на необходимость поворота руля влево.
Если транспортное средство 1 въехало в парковочное пространство 41 и оказалось в четвертом положении 34, в этом случае возможно также обнаружение передней границы парковочного пространства передними датчиками 3 расстояния транспортного средства 1. Эта ситуация показана на изображении экрана 40 на фиг.5. Изображение передней границы парковочного пространства соответственно изменится и будет представлено другим символом 42'. Водитель теперь может уяснить, что переднюю и заднюю границы парковочного пространства смогли обнаружить дополнительные измерительные системы, состоящие, соответственно, из датчиков 3 и 5 расстояния. В другом варианте осуществления при достижении четвертого положения 34 дополнительно к этому на экран 40 может быть выведен символ 48 остановки. Теперь водитель знает, что он может соответственно оставить свое транспортное средство в парковочном пространстве 41.
Если помимо бокового датчика у транспортного средства имеются датчики расстояния только спереди или только сзади, то соответствующее изменение изображения будет иметь место только для стороны, где установлена дополнительная система измерения расстояния. Изображение границы парковочного пространства с другой стороны останется при этом неизменным.
В еще одном варианте осуществления изображение границы парковочного пространства, обнаруженной посредством только одной измерительной системы, может быть представлено, например, в предупредительной окраске. Если граница парковочного пространства была обнаружена еще одной системой, цвет предупредительной окраски на изображении меняется на другой, например с красного на зеленый. Далее, существует также возможность изменения только толщины линии, обозначающей границу парковочного пространства, например с тонкой на толстую. В одном из вариантов осуществления устройство 10 управления может производить, на основе различных измерений, определение планки ("усов") погрешностей для положения границы парковочного пространства. В этом случае ширина изображаемой линии выбирается в зависимости от величины вычисленной планки погрешностей. Кроме того, в другом варианте осуществления изобретения возможен переход от изображения с плавной сменой цветов между парковочным пространством и окружающим его участком в случае, когда парковочное пространство измерено посредством первой измерительной системы, к изображению с резкой сменой цветов в случае, когда измерение выполнено второй измерительной системой, используемой вместо первой или в дополнение к ней.
Claims (7)
1. Устройство (10) управления для дисплея (14) парковочного устройства, содержащее интерфейс (19) для сопряжения с первым измерительным устройством (11), предназначенным для измерения парковочного пространства (41) при проезде мимо этого парковочного пространства (41) сбоку от него, интерфейс (17, 18) для сопряжения со вторым измерительным устройством (3, 5), предназначенным для регистрации положения передней и/или задней границы парковочного пространства (41) при въезде в парковочное пространство, и интерфейс (50) для сопряжения с дисплеем (14), предназначенным для отображения размеров парковочного пространства (41), причем изображение передней границы (42) и/или задней границы (44) парковочного пространства (41), полученное посредством только первого измерительного устройства (11), отличается от изображения передней (42') и/или задней (44') границы парковочного пространства (41), полученного посредством второго измерительного устройства (3, 5).
2. Устройство управления по п.1, отличающееся тем, что управление дисплеем (14) осуществляется таким образом, что размеры парковочного пространства отображаются при взгляде "с высоты птичьего полета".
3. Устройство управления по п.1, отличающееся тем, что устройство (10) управления выполнено с возможностью расчета пути движения транспортного средства от его фактического положения до заданного конечного положения в пределах парковочного пространства.
4. Устройство управления по п.3, отличающееся тем, что устройство (10) управления выполнено с возможностью вывода на дисплей (14) заданного конечного положения (52) транспортного средства.
5. Устройство управления по одному из предыдущих пунктов, отличающееся наличием интерфейса (50, 51) для сопряжения с сигнальным устройством (13, 14) для выдачи предупреждения при уменьшении расстояния до передней и/или задней границы парковочного пространства ниже порогового.
6. Способ отображения передней и/или задней границы парковочного пространства, характеризующийся тем, что при проезде транспортного средства мимо парковочного пространства регистрируют размеры парковочного пространства с помощью первого метода измерения, а после по меньшей мере частичного въезда транспортного средства в парковочное пространство размеры парковочного пространства регистрируют с помощью второго метода измерения, причем изображение передней и/или задней границы парковочного пространства, полученное при регистрации положения передней или задней границы парковочного пространства только с помощью первого метода измерения, отображают иначе, чем в случае регистрации положения передней или задней границы парковочного пространства с помощью второго метода измерения.
7. Способ по п.6, отличающийся тем, что отображение передней и/или задней границы парковочного пространства осуществляют по-иному за счет того, что линии, изображающие одну и ту же границу парковочного пространства при использовании разных методов измерения, различаются по толщине и/или цвету.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102007045562.5 | 2007-09-24 | ||
| DE102007045562A DE102007045562A1 (de) | 2007-09-24 | 2007-09-24 | Steuereinrichtung für eine Anzeigeeinrichtung einer Einparkeinrichtung und Verfahren zur Darstellung |
| PCT/EP2008/059689 WO2009040156A1 (de) | 2007-09-24 | 2008-07-24 | Steuereinrichtung für eine anzeigeeinrichtung einer einparkeinrichtung und verfahren zur darstellung |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2010115965A RU2010115965A (ru) | 2011-11-10 |
| RU2468944C2 true RU2468944C2 (ru) | 2012-12-10 |
Family
ID=39885684
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2010115965/11A RU2468944C2 (ru) | 2007-09-24 | 2008-07-24 | Устройство управления для дисплея парковочного устройства и способ отображения |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US20100283634A1 (ru) |
| EP (1) | EP2203329B1 (ru) |
| KR (1) | KR101493118B1 (ru) |
| CN (1) | CN101808852B (ru) |
| DE (1) | DE102007045562A1 (ru) |
| RU (1) | RU2468944C2 (ru) |
| WO (1) | WO2009040156A1 (ru) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2618514C1 (ru) * | 2013-09-30 | 2017-05-04 | Ниссан Мотор Ко., Лтд. | Устройство беспроводной подачи энергии и устройство помощи при парковке |
| RU2677256C1 (ru) * | 2015-05-29 | 2019-01-16 | Ниссан Мотор Ко., Лтд. | Система представления информации |
| RU2690790C1 (ru) * | 2015-10-22 | 2019-06-05 | Ниссан Мотор Ко., Лтд. | Способ отображения информации помощи при парковке (варианты) и устройство помощи при парковке |
| RU2691540C1 (ru) * | 2015-10-22 | 2019-06-14 | Ниссан Мотор Ко., Лтд. | Способ отображения информации содействия при парковке и устройство содействия при парковке |
| RU2691457C1 (ru) * | 2015-10-22 | 2019-06-14 | Ниссан Мотор Ко., Лтд. | Способ и устройство помощи при парковке |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102008027779A1 (de) * | 2008-06-11 | 2009-12-17 | Valeo Schalter Und Sensoren Gmbh | Verfahren zur Unterstützung eines Fahrers eines Fahrzeugs beim Einparken in eine Parklücke |
| WO2010132677A1 (en) * | 2009-05-13 | 2010-11-18 | Rutgers, The State University | Vehicular information systems and methods |
| DE102009027650A1 (de) * | 2009-07-13 | 2011-01-20 | Robert Bosch Gmbh | Vorrichtung und Verfahren zum unterstützten Einparken eines Fahrzeugs |
| DE102010020206A1 (de) * | 2010-05-12 | 2011-11-17 | Volkswagen Ag | Verfahren zum Einparken oder Ausparken eines Fahrzeugs sowie entsprechendes Assistenzsystem und Fahrzeug |
| DE102010020204A1 (de) * | 2010-05-12 | 2011-11-17 | Volkswagen Ag | Verfahren zum Einparken eines Fahrzeugs sowie entsprechendes Einparkassistenzsystem und Fahrzeug |
| KR20110137632A (ko) | 2010-06-17 | 2011-12-23 | 삼성전자주식회사 | 디스플레이 장치 및 이에 적용되는 npr 처리방법 |
| DE102010031040A1 (de) * | 2010-07-07 | 2012-01-12 | Robert Bosch Gmbh | Verfahren zur Unterstützung eines Fahrers eines Kraftfahrzeugs |
| DE102011110214B4 (de) | 2010-08-21 | 2022-06-02 | Volkswagen Aktiengesellschaft | Verfahren und Vorrichtung zum Wenden eines Kraftfahrzeugs |
| DE102010047161A1 (de) * | 2010-09-30 | 2012-04-05 | Valeo Schalter Und Sensoren Gmbh | Verfahren und Vorrichtung zur Unterstützung eines Parkvorgangs eines Fahrzeugs |
| DE102010062322A1 (de) * | 2010-12-02 | 2012-06-06 | Robert Bosch Gmbh | Verfahren zur Kalibrierung |
| DE102011003231A1 (de) * | 2011-01-27 | 2012-08-02 | Robert Bosch Gmbh | Verfahren zum automatischen Durchführen eines Fahrmanövers |
| CN102901968B (zh) * | 2011-07-29 | 2014-10-08 | 财团法人车辆研究测试中心 | 停车空间侦测方法及其装置 |
| DE102011080933A1 (de) * | 2011-08-12 | 2013-02-14 | Robert Bosch Gmbh | Verfahren zur Unterstützung eines Fahrers beim Einparken |
| CN102431551B (zh) * | 2011-11-18 | 2014-06-11 | 奇瑞汽车股份有限公司 | 一种泊车车位探测方法以及泊车车位探测系统 |
| US9696420B2 (en) * | 2013-04-09 | 2017-07-04 | Ford Global Technologies, Llc | Active park assist object detection |
| KR102108056B1 (ko) | 2013-07-26 | 2020-05-08 | 주식회사 만도 | 주차 제어 장치 및 주차 제어 방법 |
| ES2632599T3 (es) * | 2013-12-20 | 2017-09-14 | Nokia Technologies Oy | Método y aparato para provocar el envío de una directriz de aparcamiento |
| CN106232461A (zh) * | 2014-04-01 | 2016-12-14 | 奥迪股份公司 | 自动泊车方法和装置 |
| KR101712399B1 (ko) * | 2014-11-25 | 2017-03-06 | 현대모비스 주식회사 | 차량의 후방 장애물 표시 방법 |
| US10683035B2 (en) | 2015-12-08 | 2020-06-16 | Panasonic Intellectual Property Management Co., Ltd. | Parking assistance device, parking assistance method, and non-transitory computer readable medium |
| WO2018029927A1 (ja) * | 2016-08-09 | 2018-02-15 | 株式会社Jvcケンウッド | 表示制御装置、表示装置、表示制御方法及びプログラム |
| AT519839B1 (de) | 2017-04-11 | 2019-03-15 | Zkw Group Gmbh | Fahrzeugscheinwerfer sowie verfahren zur unterstützung eines einparkvorganges |
| EP3401699A1 (en) * | 2017-05-09 | 2018-11-14 | Veoneer Sweden AB | Vehicle environmental detection system for parking detection |
| CN110239521B (zh) * | 2019-05-17 | 2020-12-01 | 浙江吉利控股集团有限公司 | 一种自动泊车方法、装置及设备 |
| JP7347406B2 (ja) * | 2020-11-30 | 2023-09-20 | トヨタ自動車株式会社 | 画像表示装置、プログラム及び画像表示方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10354661A1 (de) * | 2003-11-22 | 2005-06-30 | Robert Bosch Gmbh | Vorrichtung zur semiautonomen Unterstützung des Einparkvorgangs bei Fahrzeugen |
| WO2005120932A1 (de) * | 2004-06-05 | 2005-12-22 | Robert Bosch Gmbh | Verfahren und vorrichtung zum unterstützten einparken eines kraftfahrzeuges |
| DE102005036732A1 (de) * | 2005-08-04 | 2007-02-08 | Robert Bosch Gmbh | Vorrichtung zur Parklückenvermessung |
| RU63070U1 (ru) * | 2006-11-28 | 2007-05-10 | Борис Игоревич Чемодин | Устройство для парковки транспортных средств |
| DE102006051977A1 (de) * | 2005-11-04 | 2007-05-10 | Denso Corp., Kariya | Parkassistenzsystem |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003104149A (ja) * | 2001-09-27 | 2003-04-09 | Equos Research Co Ltd | 駐車支援装置 |
| JP4094325B2 (ja) * | 2002-04-05 | 2008-06-04 | 松下電器産業株式会社 | 駐車運転支援装置 |
| DE10324812A1 (de) * | 2003-06-02 | 2004-12-23 | Robert Bosch Gmbh | Anzeigeanordnung für ein Kraftfahrzeug und Verfahren zur Ausgabe von Fahrerinformationen, insbesondere für eine Einparkhilfe |
| DE10331235A1 (de) * | 2003-07-10 | 2005-02-03 | Robert Bosch Gmbh | Fahrhilfsvorrichtung insbesondere zum Einparken eines Fahrzeugs |
| DE10351894A1 (de) * | 2003-11-06 | 2005-06-09 | Robert Bosch Gmbh | Verfahren zur Ermittlung einer Parklücke |
| DE102004010752A1 (de) * | 2004-03-05 | 2005-09-22 | Robert Bosch Gmbh | Verfahren zur Abstandswarnung und Abstandswarneinheit |
| JP2006117165A (ja) * | 2004-10-22 | 2006-05-11 | Nissan Motor Co Ltd | 駐車支援装置 |
| CN101194027B (zh) * | 2005-06-08 | 2012-10-24 | 日立化成研究中心公司 | 用于基于瘤细胞及受刺激的白细胞内mRNA表达谱而预测对肿瘤疾病的免疫应答的方法 |
| DE102005027165B4 (de) * | 2005-06-13 | 2024-01-25 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Ausgabe von Einparkhinweisen |
| WO2007015446A1 (ja) * | 2005-08-02 | 2007-02-08 | Nissan Motor Co., Ltd. | 車両周囲監視装置及び車両周囲監視方法 |
-
2007
- 2007-09-24 DE DE102007045562A patent/DE102007045562A1/de not_active Withdrawn
-
2008
- 2008-07-24 US US12/733,785 patent/US20100283634A1/en not_active Abandoned
- 2008-07-24 KR KR1020107006300A patent/KR101493118B1/ko active IP Right Grant
- 2008-07-24 CN CN200880108412.XA patent/CN101808852B/zh active Active
- 2008-07-24 RU RU2010115965/11A patent/RU2468944C2/ru active
- 2008-07-24 WO PCT/EP2008/059689 patent/WO2009040156A1/de active Application Filing
- 2008-07-24 EP EP08786381.7A patent/EP2203329B1/de active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10354661A1 (de) * | 2003-11-22 | 2005-06-30 | Robert Bosch Gmbh | Vorrichtung zur semiautonomen Unterstützung des Einparkvorgangs bei Fahrzeugen |
| WO2005120932A1 (de) * | 2004-06-05 | 2005-12-22 | Robert Bosch Gmbh | Verfahren und vorrichtung zum unterstützten einparken eines kraftfahrzeuges |
| DE102005036732A1 (de) * | 2005-08-04 | 2007-02-08 | Robert Bosch Gmbh | Vorrichtung zur Parklückenvermessung |
| DE102006051977A1 (de) * | 2005-11-04 | 2007-05-10 | Denso Corp., Kariya | Parkassistenzsystem |
| RU63070U1 (ru) * | 2006-11-28 | 2007-05-10 | Борис Игоревич Чемодин | Устройство для парковки транспортных средств |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2618514C1 (ru) * | 2013-09-30 | 2017-05-04 | Ниссан Мотор Ко., Лтд. | Устройство беспроводной подачи энергии и устройство помощи при парковке |
| RU2677256C1 (ru) * | 2015-05-29 | 2019-01-16 | Ниссан Мотор Ко., Лтд. | Система представления информации |
| RU2690790C1 (ru) * | 2015-10-22 | 2019-06-05 | Ниссан Мотор Ко., Лтд. | Способ отображения информации помощи при парковке (варианты) и устройство помощи при парковке |
| RU2691540C1 (ru) * | 2015-10-22 | 2019-06-14 | Ниссан Мотор Ко., Лтд. | Способ отображения информации содействия при парковке и устройство содействия при парковке |
| RU2691457C1 (ru) * | 2015-10-22 | 2019-06-14 | Ниссан Мотор Ко., Лтд. | Способ и устройство помощи при парковке |
Also Published As
| Publication number | Publication date |
|---|---|
| RU2010115965A (ru) | 2011-11-10 |
| CN101808852B (zh) | 2013-03-06 |
| EP2203329A1 (de) | 2010-07-07 |
| KR101493118B1 (ko) | 2015-02-12 |
| WO2009040156A1 (de) | 2009-04-02 |
| EP2203329B1 (de) | 2014-10-01 |
| KR20100057663A (ko) | 2010-05-31 |
| CN101808852A (zh) | 2010-08-18 |
| US20100283634A1 (en) | 2010-11-11 |
| DE102007045562A1 (de) | 2009-04-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2468944C2 (ru) | Устройство управления для дисплея парковочного устройства и способ отображения | |
| US7492282B2 (en) | Method and device for determining the size and position of a parking space | |
| US8098173B2 (en) | Parking apparatus | |
| US9807352B2 (en) | Method and device for parking a vehicle | |
| US8004428B2 (en) | Display device with recording quality illustration | |
| US7786896B2 (en) | Parking assistance system and parking assistance method | |
| US7289018B2 (en) | Method for distance alert and distance alerting unit | |
| US20060080005A1 (en) | Method for displaying a vehicle driving space | |
| US20110241857A1 (en) | Driver assistance method for moving a motor vehicle and driver assistance device | |
| US20080291276A1 (en) | Method for Driver Assistance and Driver Assistance Device on the Basis of Lane Information | |
| KR102004062B1 (ko) | 자동차의 운전자 보조 시스템 조작 방법, 운전자 보조 시스템 및 자동차 | |
| JP5882456B2 (ja) | 駐車誘導用後付けセット | |
| CN106945660A (zh) | 一种自动泊车系统 | |
| GB2479998A (en) | A parking system for a vehicle | |
| US20100271237A1 (en) | Parking Angle Determination and Cross Traffic Alert | |
| US20090303080A1 (en) | Parking assist device | |
| JP4832489B2 (ja) | 車線判定装置 | |
| CN111976598A (zh) | 车辆盲区监测方法及系统 | |
| JP2017502409A (ja) | 地面のマークを検出する方法、運転支援装置、及び自動車 | |
| US20160137197A1 (en) | Acceleration Suppression Device for Vehicle, and Acceleration Suppression Method for Vehicle | |
| JP2011051586A (ja) | ドライバーアシスト方法 | |
| JP2010524102A (ja) | 車道経過を表示する方法および制御装置 | |
| JPH10244891A (ja) | 駐車補助装置 | |
| JP2020111310A (ja) | 車両およびその制御方法 | |
| GB2486814A (en) | Method for assisting a driver of a motor vehicle |