RU2215840C1 - Блок-модуль фронтальных механизмов швейной машины - Google Patents
Блок-модуль фронтальных механизмов швейной машины Download PDFInfo
- Publication number
- RU2215840C1 RU2215840C1 RU2002118789/12A RU2002118789A RU2215840C1 RU 2215840 C1 RU2215840 C1 RU 2215840C1 RU 2002118789/12 A RU2002118789/12 A RU 2002118789/12A RU 2002118789 A RU2002118789 A RU 2002118789A RU 2215840 C1 RU2215840 C1 RU 2215840C1
- Authority
- RU
- Russia
- Prior art keywords
- frame
- block module
- needle bar
- block
- serves
- Prior art date
Links
- 238000009958 sewing Methods 0.000 title claims abstract description 14
- 230000007246 mechanism Effects 0.000 title claims description 13
- 229920003023 plastic Polymers 0.000 claims description 2
- 239000004033 plastic Substances 0.000 claims description 2
- 238000010276 construction Methods 0.000 abstract 1
- 230000000694 effects Effects 0.000 abstract 1
- 230000001105 regulatory effect Effects 0.000 abstract 1
- 239000000126 substance Substances 0.000 abstract 1
- 238000009434 installation Methods 0.000 description 3
- 238000005266 casting Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 229910000838 Al alloy Inorganic materials 0.000 description 1
- 239000004698 Polyethylene Substances 0.000 description 1
- 230000033228 biological regulation Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000005489 elastic deformation Effects 0.000 description 1
- 230000008030 elimination Effects 0.000 description 1
- 238000003379 elimination reaction Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- -1 polyethylene Polymers 0.000 description 1
- 229920000573 polyethylene Polymers 0.000 description 1
Images





Landscapes
- Sewing Machines And Sewing (AREA)
Abstract
Блок-модуль предназначен для использования в бытовых швейных машинах зигзаг и обеспечивает упрощение конструкции швейной машины. Блок-модуль содержит корпус, несущий рамку игловодителя, и стержень лапки с устройством его ручного подъема. Стержень смонтирован в разъемных подшипниках со сферическими втулками. Основанием подшипников служит корпус, а крышка верхнего подшипника служит опорой сферической втулки игловодителя и опорой оси качания рамки. Крышка нижнего подшипника служит направляющей рамки. На дополнительной опоре оси качания смонтирован регулятор натяжения верхней нитки. Монтируется блок во фронтовой части машины посредством призматической направляющей, обеспечивающей его регулирование в отношении паза в игольной пластине. 4 з.п. ф-лы, 8 ил.
Description
Изобретение относится к швейному машиностроению и более конкретно к бытовым швейным машинам зигзаг, в которых предварительно собранный блок устанавливается или монтируется во фронтальной части машины на заранее подготовленное место с последующей и соответствующей регулировкой при монтаже, при условии, что рамка качания игловодителя, применяемая в блок-модуле, качается на верхней оси и относится к рамкам маятникового типа.
Известна швейная машина (1), в которой блок-модуль с фронтальными механизмами - рамкой качания игловодителя, механизмом лапки - располагаются на отдельном корпусе (раме), который прикрепляется к корпусу машины (головке) с возможностью регулирования иглы относительно паза игольной пластины.
К недостаткам данной конструкции следует отнести большую материалоемкость корпуса блока, который включает угловую пластину, прикрепленную с возможностью регулирования к головке машины, и несущую рамку качания игловодителя, и стержень лапки, установленный в верхней и нижней направляющих втулках.
Известна швейная машина (2), в которой корпус блока фронтальных механизмов имеет ось для качания рамки игловодителя с верхней и нижней опорами для возвратно-поступательного перемещения игловодителя, подпружиненный стержень лапки, установленный в верхней и нижней опорах и снабженный поводком для рычага подъема лапки. Блок-модуль снабжен опорами для его установки в корпусе (головке) швейной машины. Опоры позволяют производить регулировку иглы вдоль и поперек линии строчки.
Стержень лапки выполнен в виде пластины, установленной посредством пазов на шпильках, при этом пазы выполнены со смещением относительно друг друга, а пружина расположена на плече пластины, создавая момент силы, действующий на шпильку. Сама пластина является тяжелой, материалоемкой, сложна в изготовлении, в т.ч. и из-за наличия пазов для перемещения в вертикальной плоскости, параллельность которых должна быть достаточно точной.
Техническим результатом изобретения является устранение указанных недостатков и создание такого блока-модуля, в котором корпус одновременно служит опорой стержня лапки.
Указанный технический результат достигается тем, что в блоке-модуле фронтальных механизмов швейной машины, содержащим корпус, несущий ось качания рамки игловодителя, корпус рамки которой имеет верхнюю и нижнюю опоры для возвратно-поступательного перемещения игловодителя, подпружиненный стержень лапки, установленный в верхней и нижней опорах и снабженный поводком для рычага подъема лапки, опоры для установки блок-модуля во фронтовой части рукава машины, верхняя и нижняя опоры стержня лапки выполнены в виде сферических втулок, смонтированных в разъемных подшипниках, основаниями которых служит корпус блок-модуля, при этом крышка верхнего подшипника снабжена сферической втулкой и служит верхней опорой игловодителя, а крышка нижнего подшипника служит в качестве направляющей рамки игловодителя, ось которой закреплена на крышке верхнего подшипника.
Кроме того, одна из опор для установки блока-модуля во фронтовой части рукава машины выполнена в виде призматической направляющей.
Анализ известных технических решений в исследуемой области позволяет сделать вывод об отсутствии в них признаков, сходных с существенными отличительными признаками в заявляемом блоке, и признать заявляемое решение, соответствующим критерию "изобретательский уровень".
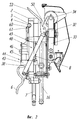
На фиг.1 изображена швейная машина с блок-модулем, вид спереди, передняя крышка снята;
На фиг.2 - вид с фронта швейной машины с блок-модулем;
На фиг.3 - вид с фронта блок-модуля;
На фиг.4 - вид спереди блок модуля;
На фиг.5 - разрез по А-А на фиг.4;
На фиг.6 - корпус блок-модуля;
На фиг.7 - разрез по Б-Б на фиг.6;
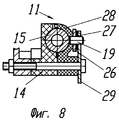
На фиг. 8 - вариант исполнения крышки верхнего разъемного подшипника стержня лапки.
На фиг.2 - вид с фронта швейной машины с блок-модулем;
На фиг.3 - вид с фронта блок-модуля;
На фиг.4 - вид спереди блок модуля;
На фиг.5 - разрез по А-А на фиг.4;
На фиг.6 - корпус блок-модуля;
На фиг.7 - разрез по Б-Б на фиг.6;
На фиг. 8 - вариант исполнения крышки верхнего разъемного подшипника стержня лапки.
Блок-модуль 1 фронтальных механизмов швейной машины содержит корпус блока 2, который в верхней части содержит призматический паз 3. Посредством последнего блок-модуль монтируется на оси 4 нитепритягивателя.
На корпусе 2 смонтирована рамка 5 качания игловодителя, рычаг 6 ручного подъема лапки. В корпусе 2 установлен стержень 7 лапки, подпружиненный пружиной 8.
Корпус блока 2 представляет собой отливку, выполненную, например, из алюминиевого сплава и служащую основанием 9 и 10 соответственно для разъемных подшипников: верхнего 11 и нижнего 12.
Внутри указанных подшипников размещены сферические втулки 13, которые служат направляющими втулками или опорами для подпружиненного стержня 7 лапки.
В крышке 14 верхнего разъемного подшипника смонтирована сферическая втулка 15, которая служит верхней опорой игловодителя 16, нижняя опора последнего также выполнена в виде сферической втулки 17, которая установлена в нижней съемной полке 18 рамки 5 качания игловодителя. Рамка 5 маятникового типа и в верхней части установлена на оси 19, закрепленной на крышке 14 верхнего 11 разъемного подшипника.
Таким образом, крышка 14 служит верхней полкой игловодителя, но поскольку она выполнена неподвижной, поворот (качание) игловодителя в верхней опоре обеспечивается за счет поворота сферической втулки 15 в крышке 14.
Нижняя съемная полка 18 выполнена в виде разъемного подшипника 20, основание 21 которого контактирует с крышкой 22 нижнего 12 разъемного подшипника, т.е. последняя служит в качестве направляющей рамки 5 игловодителя.
Крышка 23 разъемного подшипника 20 снабжена выступом 24, на который посредством отверстия 25 одета пластина 26. Последняя служит корпусом рамки 5 и к ней посредством винтов прикреплена нижняя съемная полка 18. Верхним отверстием 27 пластина 26 одета на упомянутую ось 19.
Таким образом, игловодитель 16 в рамке 5 качания перемещается возвратно-поступательно в сферических втулках 15 и 17, которые и служат опорами игловодителя, а качание рамки 5 игловодителя поперек линии строчки осуществлено посредством подвешивания ее на оси 19 и поворота сферической втулки 15 в крышке 14 верхнего разъемного подшипника 11. Ось качания рамки и геометрическая ось сферической втулки 15 совпадают.
Сферическая втулка 15 вводится в посадочное место на верхней полке или, что то же самое, в крышке 14 путем проталкивания благодаря повышенной способности к упругой деформации материала, из которого выполнена крышка 14, например полиэтилена.
В варианте исполнения верхняя опора игловодителя - сферическая втулка 15 может быть установлена в разъемном подшипнике, представленным основанием, в качестве которого служит крышка 14 верхнего 11 разъемного подшипника стержня лапки, и крышкой 28, несущую упомянутую ось 19. На последнюю, как и в первом случае, посредством отверстия 27 одета пластина 26 для качания рамки 5 игловодителя. Также рамка 5 может быть снабжена дополнительной опорой 29, прикрепленной к корпусу блока, в отверстие которой входит упомянутая ось 19. На дополнительной опоре 29 смонтирован также регулятор натяжения верхней нитки 30.
Регулятор состоит из шарнирно установленной рукоятки 31 с цифровой индикацией и спиралевидным кулачком 32, взаимодействующим с плоской фигурной пружиной 33, верхним концом надетой на шпиндель 34 и взаимодействующей с шайбами натяжения 35 через втулку освобождения 36, надетой также на шпиндель 34.
Нижний конец пружины взаимодействует с упором 37. При повороте рукоятки по часовой или против часовой стрелки кулачок 32 взаимодействует с пружиной 33 и тем самым увеличивает или уменьшает давление на шайбы натяжения 35.
Рычаг 6 ручного подъема стержня лапки имеет верхнюю поверхность 38. Ось 39 рычага 6 установлена в призматических направляющих 40, а рычаг подпружинен фигурной пружиной 41, закрепленной на корпусе винтом 42.
Верхняя поверхность 38 рычага 6 ручного подъема взаимодействует с поводком 43, который закреплен на стержне 7 лапки. Свободный конец поводка находится в направляющем пазу 44 пластины 45, прикрепленной к корпусу блока 2 посредством винта 46.
Для подъема стержня 7 лапки необходимо повернуть рычаг 6, который, преодолевая усилие пружины 8, поднимает стержень 7, а вместе с ним и лапку 47.
Блок-модуль также несет устройство 48 освобождения натяжения верхней нитки. Оно выполнено в виде штанги 49, нижним концом шарнирно соединенным с рычагом 6 подъема, а верхним взаимодействующим с колпачком освобождения посредством вилки 50, которой она охватывает буртик на втулке 36.
Штанга 49 в верхней части снабжена выступом 51, взаимодействующим при подъеме рычага 6 ручного подъема лапки с отводчиком штанги, выполненным в виде пальца 52, закрепленным на дополнительной опоре 29.
При подъеме рычага 6 ручного подъема лапки штанга 49, поднимаясь, выступом 51 взаимодействует с пальцем 52. В результате верхняя часть штанги, т. е. вилка 50, взаимодействует с втулкой освобождения 36 и, преодолевая усилие верхнего конца пружины 33, освобождает шайбы натяжения 35.
На штанге 49 закреплен нитенаправитель 53, который удерживает верхнюю нитку в процессе пошива, благодаря чему обеспечивается больший угол охвата ниткой стержня между шайбами, т.е. нитка зажимается на большей длине и, как следствие, улучшается процесс стежкообразования.
Нитка располагается под изогнутой частью нитенаправителя. Средство крепления нитенаправителя выполняет роль выступа 51 на штанге 49.
Таким образом, в собранном виде блок-модуль содержит механизм лапки, включающий подпружиненный стержень 7 лапки, рычаг 6 ручного подъема лапки, механизм иглы, включающий рамку 5 качания игловодителя, игловодитель с поводком 54, регулятор 30 натяжения верхней нитки, устройство 48 освобождения натяжения верхней нитки, нитенаправитель 53.
Все указанные элементы смонтированы на корпусе блока 2. В таком виде блок-модуль монтируется посредством верхнего призматического паза 3 во фронтальной части 55 рукава 56 машины.
Паз 3 позволяет регулировать блок вдоль и поперек строчки, т.е. регулировать положение иглы 57 относительно паза 58 игольной пластины 59 в продольном и поперечном направлениях.
Достигается это посредством продвижения блок-модуля 1 по оси 4 и поворотом его вокруг указанной оси. Крепление к оси 4 осуществляется посредством прижима 60 и болта 61, ввернутого в корпус блока 2.
После требуемой установки блок-модуля по отношению к пазу 58 игольной пластины 59 болтом 61 закрепляют прижим 60. Окончательное крепление блок-модуля достигается подводной опорой, выполненной в виде контактирующего с рукавом 56 машины винта 62, ввернутого в корпус блока 2, и фиксирующего винта 63, установленного в отверстии 64, выполненном с ощутимым зазором в корпусе блока 2. Благодаря чему регулировка и юстировка блок-модуля просты и надежны.
При этом призматический паз в корпусе блока 2 выполнен при литье корпуса и дальнейшей обработки не требует.
Также не требуют дальнейшей обработки и посадочные места, служащие основанием 9 и 10 в корпусе блока, соответственно верхнего 11 и нижнего 12 разъемных подшипников для стержня 7 лапки.
Не требуют дальнейшей обработки и крышки 14 и 22 указанных разъемных подшипников, поскольку они выполняются литьем из пластмассы.
В целом предлагаемая конструкция блок-модуля компактна, менее трудоемка в изготовлении, удобна в юстировке.
Источники информации
1. Европейский патент 0939159, D 04 B 73/02.
1. Европейский патент 0939159, D 04 B 73/02.
2. Патент США 4044701, кл. США 112-259.7
Claims (5)
1. Блок-модуль фронтальных механизмов швейной машины, содержащий корпус блока, несущий ось качания рамки игловодителя, корпус рамки которой имеет верхнюю и нижнюю опоры для возвратно-поступательного перемещения игловодителя, подпружиненный стержень лапки, установленный в верхней и нижней опорах и снабженный поводком для рычага ручного подъема лапки, опоры для установки блок-модуля во фронтовой части рукава машины, отличающийся тем, что верхняя и нижняя опоры стержня лапки выполнены в виде сферических втулок, смонтированных в разъемных подшипниках, основаниями которых служит корпус блок-модуля, при этом крышка верхнего подшипника снабжена сферической втулкой и служит верхней опорой игловодителя, а крышка нижнего подшипника служит в качестве направляющей рамки игловодителя, ось которой закреплена на крышке верхнего подшипника.
2. Блок-модуль фронтальных механизмов по п. 1, отличающийся тем, что одна из опор для установки блок-модуля во фронтовой части рукава машины выполнена в виде призматической направляющей.
3. Блок-модуль фронтальных механизмов по п. 1, отличающийся тем, что ось качания рамки игловодителя и геометрическая ось сферической втулки совпадают.
4. Блок-модуль фронтальных механизмов по п. 1, отличающийся тем, что крышки разъемных подшипников выполнены из пластмассы.
5. Блок-модуль фронтальных механизмов по п. 1, отличающийся тем, что ось качания рамки снабжена дополнительной опорой, выполненной в виде пластины, прикрепленной к корпусу и несущей регулятор натяжения верхней нитки.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2002118789/12A RU2215840C1 (ru) | 2002-07-17 | 2002-07-17 | Блок-модуль фронтальных механизмов швейной машины |
| EA200300592A EA005359B1 (ru) | 2002-07-17 | 2003-06-05 | Блок-модуль фронтальных механизмов швейной машины |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2002118789/12A RU2215840C1 (ru) | 2002-07-17 | 2002-07-17 | Блок-модуль фронтальных механизмов швейной машины |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| RU2215840C1 true RU2215840C1 (ru) | 2003-11-10 |
Family
ID=32028103
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2002118789/12A RU2215840C1 (ru) | 2002-07-17 | 2002-07-17 | Блок-модуль фронтальных механизмов швейной машины |
Country Status (2)
| Country | Link |
|---|---|
| EA (1) | EA005359B1 (ru) |
| RU (1) | RU2215840C1 (ru) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4044701A (en) * | 1973-03-16 | 1977-08-30 | Husqvarna Aktiebolag | Sewing machine frame with presser foot and needle bar unit |
| DE3421995A1 (de) * | 1983-06-22 | 1985-01-10 | The Singer Co., Stamford, Conn. | Naehmaschinenkopfendteil in modulbauweise |
| RU2055960C1 (ru) * | 1992-04-20 | 1996-03-10 | Конструкторское бюро приборостроения | Механизм игловодителя швейной машины зигзаг |
| EP0939159A1 (de) * | 1998-02-27 | 1999-09-01 | Fritz Gegauf Ag Bernina-Nähmaschinenfabrik | Nähmascine mit einem einstellbaren Kopf-Modul |
| RU2151225C1 (ru) * | 1999-02-16 | 2000-06-20 | Умяров Равиль Константинович | Швейная машина зигзаг |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CH676999A5 (ru) * | 1988-11-30 | 1991-03-28 | Mefina Sa |
-
2002
- 2002-07-17 RU RU2002118789/12A patent/RU2215840C1/ru not_active IP Right Cessation
-
2003
- 2003-06-05 EA EA200300592A patent/EA005359B1/ru not_active IP Right Cessation
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4044701A (en) * | 1973-03-16 | 1977-08-30 | Husqvarna Aktiebolag | Sewing machine frame with presser foot and needle bar unit |
| DE3421995A1 (de) * | 1983-06-22 | 1985-01-10 | The Singer Co., Stamford, Conn. | Naehmaschinenkopfendteil in modulbauweise |
| RU2055960C1 (ru) * | 1992-04-20 | 1996-03-10 | Конструкторское бюро приборостроения | Механизм игловодителя швейной машины зигзаг |
| EP0939159A1 (de) * | 1998-02-27 | 1999-09-01 | Fritz Gegauf Ag Bernina-Nähmaschinenfabrik | Nähmascine mit einem einstellbaren Kopf-Modul |
| RU2151225C1 (ru) * | 1999-02-16 | 2000-06-20 | Умяров Равиль Константинович | Швейная машина зигзаг |
Also Published As
| Publication number | Publication date |
|---|---|
| EA005359B1 (ru) | 2005-02-24 |
| EA200300592A1 (ru) | 2004-02-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JPH05277274A (ja) | ミシン装置 | |
| JPS632393Y2 (ru) | ||
| JP2003177741A (ja) | 電気ギターのトレモロ装置及び電気ギター | |
| RU2215840C1 (ru) | Блок-модуль фронтальных механизмов швейной машины | |
| US3420200A (en) | Modular sewing machines | |
| US4552081A (en) | Skeletal frame sewing machine | |
| US9340911B2 (en) | Sewing machine | |
| JPH0429400B2 (ru) | ||
| JPS63283692A (ja) | ミシン | |
| JP5050493B2 (ja) | ミシンの糸通し装置 | |
| RU2215838C1 (ru) | Швейная машина зигзаг | |
| JPH075821Y2 (ja) | ミシン | |
| US2730979A (en) | Sewing machine | |
| RU2202017C1 (ru) | Регулятор натяжения нитки иглы на швейных машинах | |
| JP3104037U (ja) | 筒型ミシンのオープナー装置 | |
| JPH0325744Y2 (ru) | ||
| RU22667U1 (ru) | Устройство для намотки нити на челночную шпулю швейной машины | |
| JP2003326005A (ja) | 針送りミシン | |
| JPH0223253Y2 (ru) | ||
| JP2696838B2 (ja) | ミシンの天ビン機構 | |
| JPH0314149Y2 (ru) | ||
| JPS5927907Y2 (ja) | ミシンの針棒運動制御装置 | |
| JPH0323175Y2 (ru) | ||
| US4535710A (en) | Stabilizing arrangement for a sewing machine cam post | |
| JP2696836B2 (ja) | ミシン |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20060718 |