KR890000552B1 - 원격조작에 의한 케이블 등의 굴곡장치 - Google Patents
원격조작에 의한 케이블 등의 굴곡장치 Download PDFInfo
- Publication number
- KR890000552B1 KR890000552B1 KR1019830006154A KR830006154A KR890000552B1 KR 890000552 B1 KR890000552 B1 KR 890000552B1 KR 1019830006154 A KR1019830006154 A KR 1019830006154A KR 830006154 A KR830006154 A KR 830006154A KR 890000552 B1 KR890000552 B1 KR 890000552B1
- Authority
- KR
- South Korea
- Prior art keywords
- connecting shaft
- cylinder
- holder
- main connecting
- piston rod
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired
Links
Images




Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
- A61B1/0051—Flexible endoscopes with controlled bending of insertion part
- A61B1/0055—Constructional details of insertion parts, e.g. vertebral elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/06—Program-controlled manipulators characterised by multi-articulated arms
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B23/00—Telescopes, e.g. binoculars; Periscopes; Instruments for viewing the inside of hollow bodies; Viewfinders; Optical aiming or sighting devices
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Surgery (AREA)
- Optics & Photonics (AREA)
- Animal Behavior & Ethology (AREA)
- Veterinary Medicine (AREA)
- Pathology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Biophysics (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Radiology & Medical Imaging (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Astronomy & Astrophysics (AREA)
- General Physics & Mathematics (AREA)
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
- Endoscopes (AREA)
- Investigating Strength Of Materials By Application Of Mechanical Stress (AREA)
- Actuator (AREA)
- Rigid Pipes And Flexible Pipes (AREA)
- Mechanical Control Devices (AREA)
Abstract
Description
Claims (2)
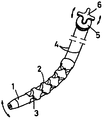
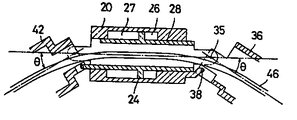
- 북동식 유체압실린더의 피스톤로드 일단에 제1주연결축에 의해서 제1호울더를 회동 자재하게 연결하고, 그 제1주연결축에 대한 피스톤로드의 힘의 작용선으로부터 소요의 간격을 둔 위치에서, 실린더의 일단과 상기 제1호울더를 제1주연결축과 평행인 제1보조연결축에 의해서 소요의 여유분을 가지고 회동자재하게 연결하며, 상기 실린더의 타단에 제2주연결축에 의해서 제2호울더를 회전 자재하게 연결하고, 그 제2주연결축에 대한 실린더의 힘의 작용선으로부터 소요의 간격을 둔 위치에서 상기 피스톤로드의 타단과 상기 제2호울더를 제2주연결축과 평행인 제2보조연결축에 의해서 소요의 여유분을 가지고 회동 자재하게 연결한 것을 특징으로 하는 원격조작에 의한 케이블 등의 굴곡장치.
- 제1항에 있어서, 상기 피스톤로드를 통형으로 형성한 것을 특징으로 하는 원격조작에 의한 케이블 등의 굴곡장치.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP58022481A JPS59146636A (ja) | 1983-02-12 | 1983-02-12 | 遠隔操作によるケ−ブルなどの屈曲装置 |
| JP22481 | 1983-02-12 | ||
| JP58-22481 | 1983-02-12 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR840009007A KR840009007A (ko) | 1984-12-20 |
| KR890000552B1 true KR890000552B1 (ko) | 1989-03-21 |
Family
ID=12083904
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1019830006154A Expired KR890000552B1 (ko) | 1983-02-12 | 1983-12-23 | 원격조작에 의한 케이블 등의 굴곡장치 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US4522113A (ko) |
| EP (1) | EP0116897B1 (ko) |
| JP (1) | JPS59146636A (ko) |
| KR (1) | KR890000552B1 (ko) |
| AU (1) | AU563128B2 (ko) |
| CA (1) | CA1233388A (ko) |
| DE (1) | DE3460582D1 (ko) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4832473A (en) * | 1987-02-06 | 1989-05-23 | Olympus Optical Co., Ltd. | Endoscope with elastic actuator comprising a synthetic rubber tube with only radial expansion controlled by a mesh-like tube |
| JPH0740088B2 (ja) * | 1987-02-06 | 1995-05-01 | オリンパス光学工業株式会社 | 内視鏡 |
| DE3914889A1 (de) * | 1989-05-05 | 1990-11-08 | Knorr Bremse Ag | Kolbenstangenloser arbeitszylinder |
| DE4303311A1 (de) * | 1993-02-05 | 1994-08-11 | Kernforschungsz Karlsruhe | Modularer, in einer Ebene symmetrisch schwenkbarer, miniaturisierter Gelenkmechanismus für die Anwendung in der Medizin |
| US6610007B2 (en) * | 2000-04-03 | 2003-08-26 | Neoguide Systems, Inc. | Steerable segmented endoscope and method of insertion |
| WO2006001146A1 (ja) * | 2004-06-25 | 2006-01-05 | Kabushiki Kaisha Yaskawa Denki | ポジショナおよび複合カールコード |
| US11027323B2 (en) | 2016-06-10 | 2021-06-08 | Advanced Orthodontic Solutions | Method and apparatus for auto-calibration of a wire bending machine |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1818679A (en) * | 1930-06-25 | 1931-08-11 | A E Feragen Inc | Axle press |
| US3580099A (en) * | 1969-09-24 | 1971-05-25 | Gen Electric | Articulating mechanism |
| JPS5219171B2 (ko) * | 1972-05-17 | 1977-05-26 | ||
| US3934450A (en) * | 1974-08-12 | 1976-01-27 | General Steel Industries, Inc. | Method and apparatus for bending elongated members |
| FR2352640A1 (fr) * | 1976-05-24 | 1977-12-23 | Bretagne Atel Chantiers | Telemanipulateur a faible encombrement |
| US4141235A (en) * | 1976-09-18 | 1979-02-27 | Masamitsu Ishihara | Hydraulic bending machine |
| DE2835331C3 (de) * | 1978-08-11 | 1981-11-05 | Siemens AG, 1000 Berlin und 8000 München | Endoskop mit elektrischer Bildübertragung |
| US4351228A (en) * | 1980-07-02 | 1982-09-28 | General Motors Corporation | Power assist rack and pinion steering gear |
-
1983
- 1983-02-12 JP JP58022481A patent/JPS59146636A/ja active Pending
- 1983-12-23 KR KR1019830006154A patent/KR890000552B1/ko not_active Expired
-
1984
- 1984-02-02 US US06/576,101 patent/US4522113A/en not_active Expired - Fee Related
- 1984-02-03 AU AU24059/84A patent/AU563128B2/en not_active Ceased
- 1984-02-08 DE DE8484101297T patent/DE3460582D1/de not_active Expired
- 1984-02-08 EP EP84101297A patent/EP0116897B1/en not_active Expired
- 1984-02-10 CA CA000447214A patent/CA1233388A/en not_active Expired
Also Published As
| Publication number | Publication date |
|---|---|
| US4522113A (en) | 1985-06-11 |
| CA1233388A (en) | 1988-03-01 |
| JPS59146636A (ja) | 1984-08-22 |
| KR840009007A (ko) | 1984-12-20 |
| EP0116897A1 (en) | 1984-08-29 |
| AU563128B2 (en) | 1987-06-25 |
| AU2405984A (en) | 1984-08-16 |
| DE3460582D1 (en) | 1986-10-09 |
| EP0116897B1 (en) | 1986-09-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0462908B1 (en) | Fluid controlled biased bending neck | |
| US4655257A (en) | Guide tube assembly for industrial endoscope | |
| US4832473A (en) | Endoscope with elastic actuator comprising a synthetic rubber tube with only radial expansion controlled by a mesh-like tube | |
| CN102239611B (zh) | 用于将缆线穿入已有的管网中的穿入装置 | |
| KR890000552B1 (ko) | 원격조작에 의한 케이블 등의 굴곡장치 | |
| US4784117A (en) | Endoscope insertion assisting device | |
| CN110811493B (zh) | 一种蛇骨单元、蛇骨、内窥镜及内窥镜转动的控制方法 | |
| CN101610709B (zh) | 多关节弯曲机构以及具备多关节弯曲机构的多关节医疗器械 | |
| EP1106137A2 (en) | Linear transmission member driving unit for endoscope | |
| WO1993007816A1 (en) | Generic endoscopic instrument | |
| JP2003305683A (ja) | ロボットの手首における線条体の敷設構造 | |
| CN114828760B (zh) | 手术器具 | |
| US9039607B2 (en) | Shaft element for an endoscopic instrument | |
| CN100414335C (zh) | 紧凑的微光缆驱动器 | |
| CN116098561A (zh) | 医疗设备 | |
| WO2022247504A1 (en) | Robotic surgery device and feeding system | |
| KR20010034496A (ko) | 신장된 물체를 클램프 속에 삽입하기 위한 장치 | |
| JPS59219503A (ja) | 駆動機構 | |
| KR102499052B1 (ko) | 내시경 수술 로봇 | |
| CN115137284A (zh) | 一种3d内窥镜 | |
| US20210094105A1 (en) | Technoscopic instrument | |
| US20220163427A1 (en) | Articulated non-destructive testing device having a plurality of actuation systems and a method of articulating the device | |
| GB2074686A (en) | Multi line hose or cable connector | |
| KR20190112877A (ko) | 내시경 | |
| CN118058687A (zh) | 医疗设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| R17-X000 | Change to representative recorded |
St.27 status event code: A-3-3-R10-R17-oth-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| G160 | Decision to publish patent application | ||
| PG1605 | Publication of application before grant of patent |
St.27 status event code: A-2-2-Q10-Q13-nap-PG1605 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| FPAY | Annual fee payment |
Payment date: 19950310 Year of fee payment: 7 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 7 |
|
| LAPS | Lapse due to unpaid annual fee | ||
| PC1903 | Unpaid annual fee |
St.27 status event code: A-4-4-U10-U13-oth-PC1903 Not in force date: 19960322 Payment event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: N-4-6-H10-H13-oth-PC1903 Ip right cessation event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date: 19960322 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R13-asn-PN2301 St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |