KR20230006829A - 융착 접속기, 융착 접속 시스템, 및 광파이버를 융착 접속하는 방법 - Google Patents
융착 접속기, 융착 접속 시스템, 및 광파이버를 융착 접속하는 방법 Download PDFInfo
- Publication number
- KR20230006829A KR20230006829A KR1020227039187A KR20227039187A KR20230006829A KR 20230006829 A KR20230006829 A KR 20230006829A KR 1020227039187 A KR1020227039187 A KR 1020227039187A KR 20227039187 A KR20227039187 A KR 20227039187A KR 20230006829 A KR20230006829 A KR 20230006829A
- Authority
- KR
- South Korea
- Prior art keywords
- discrimination
- optical fibers
- pair
- fusion
- algorithm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B6/00—Light guides; Structural details of arrangements comprising light guides and other optical elements, e.g. couplings
- G02B6/24—Coupling light guides
- G02B6/255—Splicing of light guides, e.g. by fusion or bonding
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B6/00—Light guides; Structural details of arrangements comprising light guides and other optical elements, e.g. couplings
- G02B6/24—Coupling light guides
- G02B6/255—Splicing of light guides, e.g. by fusion or bonding
- G02B6/2553—Splicing machines, e.g. optical fibre fusion splicer
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B6/00—Light guides; Structural details of arrangements comprising light guides and other optical elements, e.g. couplings
- G02B6/24—Coupling light guides
- G02B6/255—Splicing of light guides, e.g. by fusion or bonding
- G02B6/2551—Splicing of light guides, e.g. by fusion or bonding using thermal methods, e.g. fusion welding by arc discharge, laser beam, plasma torch
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B6/00—Light guides; Structural details of arrangements comprising light guides and other optical elements, e.g. couplings
- G02B6/24—Coupling light guides
- G02B6/255—Splicing of light guides, e.g. by fusion or bonding
- G02B6/2555—Alignment or adjustment devices for aligning prior to splicing
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N20/00—Machine learning
- G06N20/20—Ensemble learning
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/045—Combinations of networks
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Plasma & Fusion (AREA)
- Optics & Photonics (AREA)
- Theoretical Computer Science (AREA)
- Software Systems (AREA)
- General Engineering & Computer Science (AREA)
- Data Mining & Analysis (AREA)
- Evolutionary Computation (AREA)
- Mathematical Physics (AREA)
- Artificial Intelligence (AREA)
- Computing Systems (AREA)
- Biomedical Technology (AREA)
- Molecular Biology (AREA)
- General Health & Medical Sciences (AREA)
- Computational Linguistics (AREA)
- Biophysics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Medical Informatics (AREA)
- Mechanical Coupling Of Light Guides (AREA)
Abstract
본 개시의 융착 접속기는, 촬상부, 판별부 및 접속부를 구비한다. 촬상부는, 한 쌍의 광파이버를 촬상하여 촬상 데이터를 생성한다. 판별부는, 촬상부로부터 제공된 촬상 데이터로부터 얻어지는 복수의 특징량에 근거하여 한 쌍의 광파이버 각각의 종류를 판별한다. 판별부는, 제 1 및 제 2 판별 알고리즘 중 어느 하나에 의한 판별 결과를 채용한다. 제 1 판별 알고리즘은, 광파이버의 촬상 데이터로부터 얻어지는 복수의 특징량과 그 광파이버의 종류의 상관에 근거하여 기계 학습 이외의 방법에 의해 미리 규정된다. 제 2 판별 알고리즘은, 판별 모델을 포함한다. 판별 모델은, 광파이버의 촬상 데이터로부터 얻어지는 복수의 특징량과 그 광파이버의 종류의 대응 관계를 나타내는 샘플 데이터를 이용한 기계 학습에 의해 작성된 것이다. 접속부는, 판별부에 있어서의 판별 결과에 근거하여, 한 쌍의 광파이버의 종류의 조합에 따른 접속 조건으로 한 쌍의 광파이버를 서로 융착 접속한다.
Description
본 개시는, 융착 접속기, 융착 접속 시스템, 및 광파이버를 융착 접속하는 방법에 관한 것이다. 본 출원은, 2020년 4월 17일 출원의 국제 출원 제PCT/JP2020/016859호에 근거하는 우선권을 주장하고, 상기 국제 출원에 기재된 모든 기재 내용을 원용한다.
특허 문헌 1 및 특허 문헌 2에는, 융착 접속기, 융착 접속 시스템, 및 광파이버를 융착 접속하는 방법이 개시되어 있다.
본 개시의 융착 접속기는, 촬상부, 판별부 및 접속부를 구비한다. 촬상부는, 한 쌍의 광파이버를 촬상하여 촬상 데이터를 생성한다. 판별부는, 촬상부로부터 제공된 촬상 데이터로부터 얻어지는 복수의 특징량에 근거하여 한 쌍의 광파이버 각각의 종류를 판별한다. 판별부는, 광파이버의 종류를 판별하기 위한 제 1 및 제 2 판별 알고리즘을 갖고, 제 1 및 제 2 판별 알고리즘 중 어느 하나에 의한 판별 결과를 채용한다. 제 1 판별 알고리즘은, 광파이버의 촬상 데이터로부터 얻어지는 복수의 특징량과 상기 특징량을 얻은 광파이버의 종류의 상관에 근거하여 기계 학습 이외의 방법에 의해 미리 규정된 것이다. 제 2 판별 알고리즘은, 접속하려고 하는 광파이버의 종류를 상기 접속하려고 하는 광파이버의 촬상 데이터에 근거하여 판별하기 위한 판별 모델을 포함한다. 판별 모델은, 광파이버의 촬상 데이터로부터 얻어지는 복수의 특징량과 상기 특징량을 얻은 광파이버의 종류의 대응 관계를 나타내는 샘플 데이터를 이용한 기계 학습에 의해 작성된 것이다. 접속부는, 판별부에 있어서의 판별 결과에 근거하여, 한 쌍의 광파이버의 종류의 조합에 따른 접속 조건으로 한 쌍의 광파이버를 서로 융착 접속한다.
본 개시의 융착 접속 시스템은, 상기 융착 접속기인 복수의 융착 접속기와 모델 작성 장치를 구비한다. 모델 작성 장치는, 복수의 융착 접속기로부터 샘플 데이터를 모아 기계 학습을 행하여 판별 모델을 작성하고, 상기 판별 모델을 복수의 융착 접속기에 제공한다.
본 개시의 광파이버를 융착 접속하는 방법은, 촬상 데이터를 생성하는 공정과, 판별하는 공정과, 융착 접속하는 공정을 포함한다. 촬상 데이터를 생성하는 공정에서는, 한 쌍의 광파이버를 촬상하여 촬상 데이터를 생성한다. 판별하는 공정에서는, 촬상 데이터를 생성하는 공정에 있어서 취득된 촬상 데이터로부터 얻어지는 복수의 특징량에 근거하여 한 쌍의 광파이버 각각의 종류를 판별한다. 판별하는 공정에서는, 광파이버의 종류를 판별하기 위한 제 1 및 제 2 판별 알고리즘 중 어느 하나에 의한 판별 결과를 채용한다. 제 1 판별 알고리즘은, 광파이버의 촬상 데이터로부터 얻어지는 복수의 특징량과 상기 특징량을 얻은 광파이버의 종류의 상관에 근거하여, 기계 학습 이외의 방법에 의해 미리 규정된 것이다. 제 2 판별 알고리즘은, 접속하려고 하는 광파이버의 종류를 상기 접속하려고 하는 광파이버의 촬상 데이터에 근거하여 판별하기 위한 판별 모델을 포함한다. 판별 모델은, 광파이버의 촬상 데이터로부터 얻어지는 복수의 특징량과 상기 특징량을 얻은 광파이버의 종류의 대응 관계를 나타내는 샘플 데이터를 이용한 기계 학습에 의해 작성된 것이다. 융착 접속하는 공정에서는, 판별하는 공정에 있어서의 판별 결과에 근거하여, 한 쌍의 광파이버의 종류의 조합에 따른 접속 조건으로 한 쌍의 광파이버를 서로 융착 접속한다.
도 1은, 본 개시의 일 실시 형태에 따른 광파이버 융착 접속 시스템의 구성을 개략적으로 나타내는 도면이다.
도 2는, 융착 접속기의 외관을 나타내는 사시도로서, 방풍 커버가 닫혀 있는 상태의 외관을 나타낸다.
도 3은, 융착 접속기의 외관을 나타내는 사시도로서, 방풍 커버가 열려 융착 접속기의 내부 구조가 보이는 상태의 외관을 나타낸다.
도 4는, 융착 접속기의 기능적인 구성을 나타내는 블럭도이다.
도 5는, 융착 접속기의 하드웨어 구성을 나타내는 블럭도이다.
도 6은, 접속부의 동작을 나타내는 도면이다.
도 7은, 접속부의 동작을 나타내는 도면이다.
도 8은, 접속부의 동작을 나타내는 도면이다.
도 9는, 한쪽의 광파이버의 단면을 정면에서 본 도면이다.
도 10은, 촬상부에 있어서 얻어지는 촬상 데이터를 모식적으로 나타내는 도면이다.
도 11은, 모델 작성 장치의 기능적인 구성을 나타내는 블럭도이다.
도 12는, 모델 작성 장치의 하드웨어 구성을 나타내는 블럭도이다.
도 13은, 일 실시 형태에 따른 방법을 나타내는 흐름도이다.
도 14는, 변형예에 따른 방법을 나타내는 흐름도이다.
도 2는, 융착 접속기의 외관을 나타내는 사시도로서, 방풍 커버가 닫혀 있는 상태의 외관을 나타낸다.
도 3은, 융착 접속기의 외관을 나타내는 사시도로서, 방풍 커버가 열려 융착 접속기의 내부 구조가 보이는 상태의 외관을 나타낸다.
도 4는, 융착 접속기의 기능적인 구성을 나타내는 블럭도이다.
도 5는, 융착 접속기의 하드웨어 구성을 나타내는 블럭도이다.
도 6은, 접속부의 동작을 나타내는 도면이다.
도 7은, 접속부의 동작을 나타내는 도면이다.
도 8은, 접속부의 동작을 나타내는 도면이다.
도 9는, 한쪽의 광파이버의 단면을 정면에서 본 도면이다.
도 10은, 촬상부에 있어서 얻어지는 촬상 데이터를 모식적으로 나타내는 도면이다.
도 11은, 모델 작성 장치의 기능적인 구성을 나타내는 블럭도이다.
도 12는, 모델 작성 장치의 하드웨어 구성을 나타내는 블럭도이다.
도 13은, 일 실시 형태에 따른 방법을 나타내는 흐름도이다.
도 14는, 변형예에 따른 방법을 나타내는 흐름도이다.
[본 개시가 해결하려고 하는 과제]
광파이버에는 여러 가지 종류가 존재한다. 광파이버의 종류는, 예를 들면, 용도 및 광학 특성에 관한 특징, 및 구조적인 특징에 의해 구별된다. 용도 및 광학 특성에 관한 특징으로서는, 싱글 모드 파이버(SMF:Single Mode Fiber), 멀티 모드 파이버(MMF:Multi Mode Fiber), 범용 싱글 모드 파이버, 분산 시프트·싱글 모드 파이버(DSF:Dispersion Shifted SMF), 및 비영 분산 시프트·싱글 모드 파이버(NZDSF:Non-Zero DSF)와 같은 특징이 있다. 구조적인 특징으로서는, 광파이버의 직경, 코어 지름, 코어 및 클래드의 재질, 지름 방향의 굴절률 분포 등이 있다. 그리고, 한 쌍의 광파이버끼리를 융착 접속할 때의 최적인 융착 조건, 예를 들면 방전 시간 및 광파이버끼리의 상대 위치는, 한 쌍의 광파이버의 종류의 조합에 따라 변화한다. 그렇지만, 이미 부설된 광파이버의 종류는 불명인 경우가 많다. 따라서, 접속 대상인 한 쌍의 광파이버의 종류의 조합을, 융착 접속기에 있어서 정확하게 판별하는 것이 중요해진다.
예를 들면, 특허 문헌 2에 기재된 시스템에서는, 광파이버의 지름 방향의 휘도 분포 데이터로부터 그 광파이버의 종류를 판별할 수 있는 판별 모델을, 기계 학습을 이용하여 작성하고 있다. 그렇지만, 기계 학습에 의한 판별 모델만을 이용하여도, 그 판별 정밀도에는 한계가 있다.
[본 개시의 효과]
본 개시에 의하면, 광파이버 종류의 판별 정밀도를 높일 수가 있는 융착 접속기, 융착 접속 시스템, 및 광파이버를 융착 접속하는 방법을 제공하는 것이 가능해진다.
[본 개시의 실시 형태의 설명]
최초로, 본 개시의 실시 형태를 열기하여 설명한다. 일 실시 형태에 따른 융착 접속기는, 촬상부, 판별부 및 접속부를 구비한다. 촬상부는, 한 쌍의 광파이버를 촬상하여 촬상 데이터를 생성한다. 판별부는, 촬상부로부터 제공된 촬상 데이터로부터 얻어지는 복수의 특징량에 근거하여 한 쌍의 광파이버 각각의 종류를 판별한다. 판별부는, 광파이버의 종류를 판별하기 위한 제 1 및 제 2 판별 알고리즘을 갖고, 제 1 및 제 2 판별 알고리즘 중 어느 하나에 의한 판별 결과를 채용한다. 제 1 판별 알고리즘은, 광파이버의 촬상 데이터로부터 얻어지는 복수의 특징량과 상기 특징량을 얻은 광파이버의 종류의 상관에 근거하여, 기계 학습 이외의 방법에 의해 미리 규정된 것이다. 제 2 판별 알고리즘은, 접속하려고 하는 광파이버의 종류를 상기 접속하려고 하는 광파이버의 촬상 데이터에 근거하여 판별하기 위한 판별 모델을 포함한다. 판별 모델은, 광파이버의 촬상 데이터로부터 얻어지는 복수의 특징량과 상기 특징량을 얻은 광파이버의 종류의 대응 관계를 나타내는 샘플 데이터를 이용한 기계 학습에 의해 작성된 것이다. 접속부는, 판별부에 있어서의 판별 결과에 근거하여, 한 쌍의 광파이버의 종류의 조합에 따른 접속 조건으로 한 쌍의 광파이버를 서로 융착 접속한다.
일 실시 형태에 따른 융착 접속 시스템은, 상기 융착 접속기인 복수의 융착 접속기와 모델 작성 장치를 구비한다. 모델 작성 장치는, 복수의 융착 접속기로부터 샘플 데이터를 모아 기계 학습을 행하여 판별 모델을 작성하고, 그 판별 모델을 복수의 융착 접속기에 제공한다.
일 실시 형태에 따른 광파이버를 융착 접속하는 방법은, 촬상 데이터를 생성하는 공정과, 판별하는 공정과, 융착 접속하는 공정을 포함한다. 촬상 데이터를 생성하는 공정은, 한 쌍의 광파이버를 촬상하여 촬상 데이터를 생성한다. 판별하는 공정에서는, 생성하는 공정에 있어서 취득된 촬상 데이터로부터 얻어지는 복수의 특징량에 근거하여 한 쌍의 광파이버 각각의 종류를 판별한다. 판별하는 공정에서는, 광파이버의 종류를 판별하기 위한 제 1 및 제 2 판별 알고리즘 중 어느 하나에 의한 판별 결과를 채용한다. 제 1 판별 알고리즘은, 광파이버의 촬상 데이터로부터 얻어지는 복수의 특징량과 상기 특징량을 얻은 광파이버의 종류의 상관에 근거하여, 기계 학습 이외의 방법에 의해 미리 규정된 것이다. 제 2 판별 알고리즘은, 접속하려고 하는 광파이버의 종류를 상기 접속하려고 하는 광파이버의 촬상 데이터에 근거하여 판별하기 위한 판별 모델을 포함한다. 판별 모델은, 광파이버의 촬상 데이터로부터 얻어지는 복수의 특징량과 상기 특징량을 얻은 광파이버의 종류의 대응 관계를 나타내는 샘플 데이터를 이용한 기계 학습에 의해 작성된 것이다. 융착 접속하는 공정에서는, 판별하는 공정에 있어서의 판별 결과에 근거하여, 한 쌍의 광파이버의 종류의 조합에 따른 접속 조건으로 한 쌍의 광파이버를 서로 융착 접속한다.
상기의 융착 접속기, 융착 접속 시스템, 및 융착 접속하는 방법에서는, 제 1 및 제 2 판별 알고리즘을 이용하여 광파이버의 종류를 판별한다. 이 중 제 1 판별 알고리즘은, 광파이버의 촬상 데이터로부터 얻어지는 복수의 특징량과 그 광파이버의 종류의 상관에 근거하여 기계 학습 이외의 방법에 의해 미리 규정된 것으로, 종래와 동등의 판별 정밀도를 기대할 수 있다. 제 2 판별 알고리즘은, 복수의 특징량과 광파이버의 종류의 대응 관계를 나타내는 샘플 데이터를 이용한 기계 학습에 의해 작성된 판별 모델을 포함한다. 따라서, 제 1 판별 알고리즘으로 판별 불능 또는 오판별을 하기 쉬운 광파이버의 종류에 대해서, 기계 학습에 근거하는 고정밀의 판별을 기대할 수 있다. 고로, 상기의 융착 접속기, 융착 접속 시스템, 및 융착 접속하는 방법에 의하면, 제 1 및 제 2 판별 알고리즘 중 어느 하나에 의한 판별 결과를 채용하는 것에 의해, 종래와 비교하여 광파이버 종류의 판별 정밀도를 높일 수가 있다.
상기의 융착 접속기, 융착 접속 시스템, 및 융착 접속하는 방법에 있어서, 기계 학습은 심층 학습이어도 좋다. 이 경우, 광파이버 종류의 판별 정밀도를 더욱 높일 수가 있다.
상기의 융착 접속기, 융착 접속 시스템, 및 융착 접속하는 방법에 있어서, 판별부는(판별하는 공정에서는), 복수의 특징량에 포함되는 소정의 특징량이 임계값보다 큰 경우에 제 1 및 제 2 판별 알고리즘 중 한쪽에 의한 판별 결과를 채용하고, 소정의 특징량이 임계값보다 작은 경우에 제 1 및 제 2 판별 알고리즘 중 다른 쪽에 의한 판별 결과를 채용해도 좋다. 예를 들면 이러한 방식에 의해, 제 1 및 제 2 판별 알고리즘 중 어느 하나의 판별 결과를 채용할지를 용이하게 선택할 수가 있다. 이 경우, 임계값은, 소정의 특징량이 변화했을 때의, 제 1 판별 알고리즘에 의한 판별 정밀도와 제 2 판별 알고리즘에 의한 판별 정밀도의 비교에 근거하여 결정된 값이어도 좋다. 이것에 의해, 광파이버 종류의 판별 정밀도를 더욱 높일 수가 있다.
상기의 융착 접속기, 융착 접속 시스템, 및 융착 접속하는 방법에 있어서, 판별부는(판별하는 공정에서는), 제 1 판별 알고리즘에 의해 한 쌍의 광파이버 각각의 종류를 판별할 수 있었던 경우에 그 판별 결과를 채용하고, 제 1 판별 알고리즘에 의해 한 쌍의 광파이버 각각의 종류를 판별할 수 없었던 경우에 제 2 판별 알고리즘에 의한 판별 결과를 채용해도 좋다. 예를 들면 이러한 방식에 의해, 광파이버 종류의 판별 정밀도를 높일 수가 있다. 이 경우, 판별부는(판별하는 공정에서는), 먼저 제 1 판별 알고리즘을 실행하고, 제 1 판별 알고리즘에 의해 한 쌍의 광파이버 각각의 종류를 판별할 수 없었던 경우에 제 2 판별 알고리즘을 실행해도 좋다. 이것에 의해, 판별부의(판별하는 공정에 있어서의) 연산량을 저감할 수가 있다. 혹은, 판별부는(판별하는 공정에서는), 제 1 판별 알고리즘과, 제 2 판별 알고리즘을 병행하여 실행해도 좋다. 이것에 의해, 최종적인 판별 결과를 얻을 때까지의 소요 시간을 단축할 수가 있다.
상기의 융착 접속기, 융착 접속 시스템, 및 융착 접속하는 방법에 있어서, 촬상부는(촬상 데이터를 생성하는 공정에서는), 한 쌍의 광파이버를 적어도 2회 촬상하여 적어도 2회 분의 촬상 데이터를 생성해도 좋다. 그리고, 판별부는(판별하는 공정에서는), 적어도 2회 분의 촬상 데이터로부터 얻어지는, 복수의 특징량으로 이루어지는 적어도 2개의 특징량군 사이에 있어서의 소정의 특징량의 격차가 임계값보다 큰 경우에, 제 1 및 제 2 판별 알고리즘 중 한쪽에 의한 판별 결과를 채용해도 좋다. 판별부는(판별하는 공정에서는), 소정의 특징량의 격차가 임계값보다 작은 경우에, 제 1 및 제 2 판별 알고리즘 중 어느 하나에 의한 판별 결과를 채용해도 좋다. 이것에 의해, 광파이버 종류의 판별 정밀도를 더욱 높일 수가 있다.
상기의 융착 접속기, 융착 접속 시스템, 및 융착 접속하는 방법에 있어서, 촬상부는(촬상 데이터를 생성하는 공정에서는), 한 쌍의 광파이버를 적어도 2회 촬상하여 적어도 2회 분의 촬상 데이터를 생성해도 좋다. 그리고, 판별부는(판별하는 공정에서는), 적어도 2회 분의 촬상 데이터로부터 얻어지는, 복수의 특징량으로 이루어지는 적어도 2개의 특징량군에 근거하여 제 1 및 제 2 판별 알고리즘을 실행해도 좋다. 판별부는(판별하는 공정에서는), 제 1 판별 알고리즘에 의한 적어도 2개의 판별 결과와, 제 2 판별 알고리즘에 의한 적어도 2개의 판별 결과 중, 판별 결과의 격차가 작은 쪽을 채용해도 좋다. 이것에 의해, 광파이버 종류의 판별 정밀도를 더욱 높일 수가 있다.
상기의 융착 접속기, 융착 접속 시스템, 및 융착 접속하는 방법에 있어서, 한 쌍의 광파이버의 광축 방향에 있어서의, 상기 적어도 2회 분의 촬상 데이터의 촬상 위치는, 서로 같아도 좋고, 혹은 서로 달라도 좋다.
상기의 융착 접속 시스템에 있어서, 모델 작성 장치는, 복수의 융착 접속기를 촬상 데이터의 경향이 유사하다고 추정되는 2 이상의 그룹으로 분류하여 그룹마다 판별 모델을 작성해도 좋다. 그리고, 각 융착 접속기의 판별부의 제 2 판별 알고리즘은, 그 융착 접속기가 속하는 그룹에 대응하는 판별 모델을 모델 작성 장치로부터 얻어도 좋다. 이것에 의해, 촬상 데이터의 경향이 유사한 그룹 내, 예를 들면, 융착 접속기의 기계적 및 구조적인 격차가 적은 그룹 내, 촬상부의 기계적 및 구조적인 격차가 적은 그룹 내로 한정하여 기계 학습을 행할 수가 있다. 고로, 제 2 판별 알고리즘에 의한 광파이버 종류의 판별 정밀도를 더욱 높일 수가 있다.
상기의 융착 접속 시스템에 있어서, 모델 작성 장치의 기계 학습에 제공되는 샘플 데이터에는, 제 1 판별 알고리즘에 의해 한 쌍의 광파이버 각각의 종류를 판별할 수 있었을 때의 샘플 데이터와, 제 1 판별 알고리즘에 의해 한 쌍의 광파이버 각각의 종류를 판별할 수 없었을 때 및 오판별했을 때의 샘플 데이터의 양쪽이 포함되어도 좋다. 이 경우, 제 1 판별 알고리즘의 약점인 광파이버 종류를 모델 작성 장치의 기계 학습에 포함할 수가 있어, 종합적인 광파이버 종류의 판별 정밀도를 높일 수가 있다.
상기의 융착 접속 시스템에 있어서, 모델 작성 장치의 기계 학습에 제공되는 샘플 데이터에는, 제 1 판별 알고리즘에 의해 한 쌍의 광파이버 각각의 종류를 판별할 수 있었을 때의 샘플 데이터만이 포함되고, 각 융착 접속기의 판별부는, 제 1 판별 알고리즘에 의해 한 쌍의 광파이버 각각의 종류를 판별할 수 없었을 때 및 오판별했을 때의 자신의 샘플 데이터를 이용하여 기계 학습을 행하여 판별 모델을 개량해도 좋다. 이 경우, 각 융착 접속기의 기계적 및 구조적인 격차, 예를 들면 촬상부의 기계적 및 구조적인 격차 등에 의해 제 1 판별 알고리즘에서는 판별할 수 없는 광파이버 종류에 대해서, 제 2 판별 알고리즘의 판별 정밀도를 융착 접속기마다 높일 수가 있다.
상기의 융착 접속 시스템에 있어서, 모델 작성 장치의 기계 학습에 제공되는 샘플 데이터에는, 제 1 판별 알고리즘에 의해 한 쌍의 광파이버 각각의 종류를 판별할 수 있었을 때의 샘플 데이터와, 제 1 판별 알고리즘에 의해 한 쌍의 광파이버 각각의 종류를 판별할 수 없었을 때 및 오판별했을 때의 샘플 데이터가 포함되어도 좋다. 그리고, 각 융착 접속기의 판별부는, 제 1 판별 알고리즘에 의해 한 쌍의 광파이버 각각의 종류를 판별할 수 없었을 때 및 오판별했을 때의 자신의 샘플 데이터를 이용하여 기계 학습을 행하여 판별 모델을 개량해도 좋다. 단, 모델 작성 장치에 제공한 샘플 데이터를 제외한다. 이 경우, 제 1 판별 알고리즘의 약점인 광파이버 종류를 모델 작성 장치의 기계 학습에 포함할 수가 있다. 더하여, 각 융착 접속기의 기계적 및 구조적인 격차, 예를 들면 촬상부의 기계적 및 구조적인 격차 등에 의해 제 1 판별 알고리즘에서는 판별할 수 없는 광파이버 종류에 대해서, 제 2 판별 알고리즘의 판별 정밀도를 융착 접속기마다 높일 수가 있다. 고로, 종합적인 광파이버 종류의 판별 정밀도를 보다 높일 수가 있다.
상기의 융착 접속하는 방법에 있어서, 종류가 기지(旣知)인 2 이상의 광파이버를 촬상하여 촬상 데이터를 생성하고, 그 촬상 데이터로부터 얻어지는 복수의 특징량에 근거하여, 제 1 및 제 2 판별 알고리즘에 의해 2 이상의 광파이버의 종류를 판별해도 좋다. 그리고, 제 1 및 제 2 판별 알고리즘 중 판별 정밀도가 높은 쪽을, 상기의 판별하는 공정에 있어서 채용해도 좋다. 이것에 의해, 광파이버 종류의 판별 정밀도를 더욱 높일 수가 있다.
[본 개시의 실시 형태의 상세]
본 개시의, 융착 접속기, 융착 접속 시스템, 및 광파이버를 융착 접속하는 방법의 구체예를, 이하에 도면을 참조하면서 설명한다. 또한, 본 발명은 이들 예시로 한정되는 것은 아니고, 청구의 범위에 의해 나타나고, 청구의 범위와 균등의 의미 및 범위 내에서의 모든 변경이 포함되는 것이 의도된다. 이하의 설명에서는, 도면의 설명에 있어서 동일한 요소에는 동일한 부호를 부여하고, 중복하는 설명을 생략한다.
도 1은, 본 개시의 일 실시 형태에 따른 융착 접속 시스템(1A)의 구성을 개략적으로 나타내는 도면이다. 이 융착 접속 시스템(1A)은, 복수의 융착 접속기(10)와, 모델 작성 장치(20)를 구비한다. 융착 접속기(10)는, 광파이버의 융착 접속을 행하는 장치이다. 모델 작성 장치(20)는, 광파이버의 종류를 판별하기 위한 판별 모델을 작성하는 장치이다. 모델 작성 장치(20)는, 정보 통신망(30)을 통하여 복수의 융착 접속기(10)와 통신 가능한 컴퓨터이다. 정보 통신망(30)은, 예를 들면 인터넷이다. 모델 작성 장치(20)의 소재 지역은, 융착 접속기(10)의 소재 지역에서 떨어져 있다.
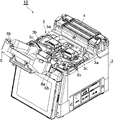
도 2 및 도 3은, 융착 접속기(10)의 외관을 나타내는 사시도이다. 도 2는 방풍 커버가 닫혀 있는 상태의 외관을 나타내고, 도 3은 방풍 커버가 열려 융착 접속기(10)의 내부 구조가 보이는 상태의 외관을 나타낸다. 도 2 및 도 3에 나타내는 바와 같이, 융착 접속기(10)는 상자 형상의 하우징(2)을 구비하고 있다. 이 하우징(2)의 상부에는, 광파이버끼리를 융착 접속하기 위한 접속부(3)와, 가열기(4)가 마련되어 있다. 가열기(4)는, 접속부(3)에 있어서 융착 접속된 광파이버끼리의 접속 부분에 씌워진 파이버 보강 슬리부를 가열 수축시키는 부분이다. 융착 접속기(10)는, 하우징(2)의 내부에 배치된 촬상부(후술)에 의해 촬상된 광파이버끼리의 융착 접속 상황을 표시하는 모니터(5)를 구비하고 있다. 또한, 융착 접속기(10)는, 접속부(3)로의 바람의 진입을 방지하기 위한 방풍 커버(6)를 구비하고 있다.
접속부(3)는, 한 쌍의 광파이버 홀더(3a)를 탑재 가능한 홀더 탑재부와, 한 쌍의 파이버 위치 결정부(3b)와, 한 쌍의 방전 전극(3c)을 가지고 있다. 융착 대상의 광파이버 각각은 광파이버 홀더(3a)에 유지 고정되고, 광파이버 홀더(3a)는 각각 홀더 탑재부에 탑재 고정된다. 파이버 위치 결정부(3b)는, 한 쌍의 광파이버 홀더(3a)의 사이에 배치되고, 광파이버 홀더(3a)의 각각에 유지된 광파이버의 선단부를 위치 결정한다. 방전 전극(3c)은, 아크 방전에 의해 광파이버의 선단끼리를 융착하기 위한 전극으로서, 한 쌍의 파이버 위치 결정부(3b) 사이에 배치되어 있다.
방풍 커버(6)는, 접속부(3)를 개폐 자재로 덮도록 하우징(2)에 연결되어 있다. 방풍 커버(6)의 측면(6a)의 각각에는, 접속부(3)에, 즉 광파이버 홀더(3a)의 각각에 광파이버를 도입하기 위한 도입구(6b)가 형성되어 있다.
도 4는, 융착 접속기(10)의 기능적인 구성을 나타내는 블럭도이다. 도 5는, 융착 접속기(10)의 하드웨어 구성을 나타내는 블럭도이다. 도 4에 나타내는 바와 같이, 융착 접속기(10)는, 기능적으로는, 접속부(3), 통신부(11), 촬상부(12), 특징량 추출부(13), 판별부(14), 및 융착 제어부(15)를 구비한다. 촬상부(12)는, 촬상 소자와, 촬상 대상물의 확대상을 촬상 소자에 출력하는 관찰용 광학부를 포함한다. 관찰용 광학부는, 예를 들면 하나 또는 복수의 렌즈를 포함한다. 융착 접속기(10)는, 도 5에 나타내는 바와 같이, CPU(10a), RAM(10b), ROM(10c), 입력 장치(10d), 보조 기억 장치 (10e), 및 출력 장치(10f) 등의 하드웨어를 구비하는 컴퓨터를 제어부로서 포함한다. 이들 구성 요소가 프로그램 등에 의해 동작하는 것에 의해, 융착 접속기(10)의 각 기능이 실현된다. 제어부에 있어서의 이들 요소는, 전술한 접속부(3), 모니터(5), 통신부(11)로서의 무선 통신 모듈, 및 촬상부(12)와 전기적으로 접속되어 있다. 입력 장치(10d)는, 모니터(5)에 일체로 하여 마련된 터치 패널을 포함해도 좋다.
통신부(11)는, 예를 들면, 무선 LAN 모듈에 의해 구성된다. 통신부(11)는, 인터넷 등의 정보 통신망(30)을 통하여, 모델 작성 장치(20)와의 사이에서 각종 데이터의 송수신을 행한다. 촬상부(12)는, 접속 대상인 한 쌍의 광파이버를, 그 한 쌍의 광파이버가 서로 대향한 상태에서, 관찰용 광학부(렌즈)를 통하여 광파이버의 지름 방향에서 촬상하여, 촬상 데이터를 생성한다. 특징량 추출부(13)는, 촬상부(12)로부터 얻어지는 촬상 데이터로부터, 광파이버의 종류를 특정하기 위한 복수의 특징량을 추출한다. 특징량은, 광파이버의 지름 방향에 있어서의 휘도 정보를 포함한다. 광파이버의 지름 방향에 있어서의 휘도 정보는, 예를 들면, 광파이버의 지름 방향에 있어서의 휘도 분포, 광파이버의 외경, 코어의 외경, 코어 외경과 광파이버의 외경의 비, 광파이버의 코어와 클래드의 면적의 비율, 광파이버의 휘도의 총계, 광파이버의 단면 내에 있어서의 휘도 분포의 변곡점 위치나 수, 광파이버의 코어부와 클래드부의 휘도차, 및 특정의 휘도 이상이 되는 코어부의 폭 등 중 적어도 하나를 포함한다. 또, 특징량의 추출에 이용하는 촬상 데이터에는, 접속 대상인 한 쌍의 광파이버를 서로 대향시킨 상태에서 방전하면서 취득한 것이 포함되어도 좋다. 이 경우, 특징량은, 예를 들면, 특정 위치에 있어서의 광 강도, 및 특정 위치에 있어서의 광 강도의 시간 변화 중 적어도 하나를 포함한다.
판별부(14)는, 특징량 추출부(13)로부터 제공되는 복수의 특징량에 근거하여, 접속 대상인 한 쌍의 광파이버 각각의 종류를 판별한다. 그를 위하여, 판별부(14)는, 광파이버의 종류를 판별하기 위한 제 1 판별 알고리즘(14a) 및 제 2 판별 알고리즘(14b)을 기억하여 유지하고 있다. 제 1 판별 알고리즘(14a)은, 복수의 특징량과 광파이버의 종류의 상관에 근거하여, 기계 학습 이외의 방법에 의해 미리 규정된 것이다. 예를 들면, 제 1 판별 알고리즘(14a)은, 광파이버의 종류에 따른 전형적인 특징량의 임계값을 경험적으로, 혹은 시험에 의해 정하고, 그 특징량과 임계값의 대소 관계에 근거하여 광파이버의 종류를 판별한다. 일례로서는, 싱글 모드 파이버와 멀티 모드 파이버를 판별하기 위해서, 특징량으로서 코어 외경을 이용한다. 그 경우, 특징량으로서의 코어 외경이 소정의 임계값보다 작은 경우에는 싱글 모드 파이버로 판정하고, 코어 외경이 소정의 임계값보다 큰 경우에는 멀티 모드 파이버로 판정한다.
제 2 판별 알고리즘(14b)은, 접속하려고 하는 광파이버의 종류를 상기 접속하려고 하는 광파이버의 촬상 데이터에 근거하여 판별하기 위한 판별 모델 Md를 포함한다. 판별 모델 Md는, 복수의 특징량과 광파이버의 종류의 대응 관계를 나타내는 샘플 데이터를 이용한, 모델 작성 장치(20)에 의한 기계 학습에 의해 작성된 것이다. 판별 모델 Md는, 특징량 추출부(13)로부터 얻어지는 특징량의 입력에 의해, 한 쌍의 광파이버 각각의 종류를 판별한다. 이들 판별 알고리즘(14a), (14b)은, 예를 들면 ROM(10c) 또는 보조 기억 장치 (10e)에 기억되어 있다. 판별부(14)는, 하기의 방식 A, B, C, D 중 어느 하나에 의해, 판별 알고리즘(14a), (14b) 중 어느 하나에 의한 판별 결과를 선택하여 채용한다.
(방식 A)
판별부(14)는, 제 1 판별 알고리즘(14a)에 의한 오판별의 우려가 낮은 경우에 제 1 판별 알고리즘(14a)의 판별 결과를 채용하고, 제 1 판별 알고리즘(14a)에 의한 오판별의 우려가 높은 경우에 제 2 판별 알고리즘(14b)의 판별 결과를 채용한다. 오판별의 우려의 고저는, 예를 들면, 복수의 특징량에 포함되는 소정의 특징량과 임계값의 대소에 의해 결정될 수 있다. 즉, 복수의 특징량에 포함되는 소정의 특징량이 소정의 임계값보다 큰 경우에, 판별 알고리즘(14a), (14b) 중 한쪽에 의한 판별 결과를 채용하고, 소정의 특징량이 소정의 임계값보다 작은 경우에, 판별 알고리즘(14a), (14b) 중 다른 쪽에 의한 판별 결과를 채용한다. 바꾸어 말하면, 소정의 특징량이 소정의 임계값보다 작은(또는 큰) 경우에 제 1 판별 알고리즘(14a)을 채용하고, 상기 소정의 특징량이 소정의 임계값보다 큰(또는 작은) 경우에 제 2 판별 알고리즘(14b)을 채용한다.
소정의 임계값은, 소정의 특징량이 변화했을 때의, 제 1 판별 알고리즘(14a)에 의한 판별 정밀도와, 제 2 판별 알고리즘(14b)에 의한 판별 정밀도의 비교에 근거하여 결정된 값이다. 바꾸어 말하면, 소정의 임계값은, 제 1 판별 알고리즘(14a)과 제 2 판별 알고리즘(14b) 사이에서 판별 정밀도의 높이가 역전할 때의 소정의 특징량의 값이다. 따라서, 소정의 특징량이 소정의 임계값보다 작은 범위에 있어서는, 제 1 판별 알고리즘(14a)에 의한 판별 정밀도는 제 2 판별 알고리즘(14b)에 의한 판별 정밀도보다 높다(또는 낮다). 소정의 특징량이 소정의 임계값보다 큰 범위에 있어서는, 제 2 판별 알고리즘(14b)에 의한 판별 정밀도는 제 1 판별 알고리즘(14a)에 의한 판별 정밀도보다 높다(또는 낮다). 그리고, 판별부(14)는, 소정의 특징량과 소정의 임계값의 대소 관계에 근거하여, 판별 알고리즘(14a), (14b) 중 판별 정밀도가 높은 쪽의 판별 결과를 채용한다. 또한, 융착 접속기(10)를 가동함에 따라, 판별 알고리즘(14a), (14b)의 판별 정밀도는 경시적으로 변화한다. 상기의 소정의 임계값은, 예를 들면, 융착 접속기(10)의 가동 중에 판별 알고리즘(14a), (14b)의 판별 정밀도를 순차 산출하여 결정된다.
(방식 B)
판별부(14)는, 제 1 판별 알고리즘(14a)에 의해 한 쌍의 광파이버 각각의 종류를 판별할 수 있었던 경우에 그 판별 결과를 채용한다. 판별부(14)는, 제 1 판별 알고리즘(14a)에 의해 한 쌍의 광파이버 각각의 종류를 판별할 수 없었던 경우에, 제 2 판별 알고리즘(14b)에 의한 판별 결과를 채용한다. 여기서, 「광파이버 종류를 판별할 수 있다」란, 특징량 추출부(13)에 의해 추출된 복수의 특징량에 대응하는 광파이버 종류가 제 1 판별 알고리즘(14a)에 있어서 존재하는 것을 의미한다. 「광파이버 종류를 판별할 수 없다」란, 특징량 추출부(13)에 의해 추출된 복수의 특징량에 대응하는 광파이버 종류가 제 1 판별 알고리즘(14a)에 있어서 존재하지 않는 것을 의미한다. 이 방식 B에 있어서, 판별부(14)는, 먼저 제 1 판별 알고리즘(14a)을 실행하고, 제 1 판별 알고리즘(14a)에 의해 한 쌍의 광파이버 각각의 종류를 판별할 수 없었던 경우에, 제 2 판별 알고리즘(14b)을 실행해도 좋다. 혹은, 판별부(14)는, 제 1 판별 알고리즘(14a)과, 제 2 판별 알고리즘(14b)을 병행하여 실행해도 좋다.
(방식 C)
이 방식에서는, 우선, 촬상부(12)가, 한 쌍의 광파이버 F1, F2를 적어도 2회 촬상하여, 적어도 2회 분의 촬상 데이터 PX, PY를 생성한다. 특징량 추출부(13)는, 적어도 2회 분의 촬상 데이터 PX, PY로부터, 복수의 특징량으로 이루어지는 적어도 2개의 특징량군을 추출한다. 판별부(14)는, 적어도 2개의 특징량군 사이에 있어서의 소정의 특징량의 격차가 임계값보다 큰 경우에, 판별 알고리즘(14a), (14b) 중 한쪽, 즉 소정의 특징량의 격차에 기인하는 판별 정밀도의 저하가 작은 쪽의 알고리즘에 의한 판별 결과를 채용한다. 판별부(14)는, 소정의 특징량의 격차가 임계값보다 작은 경우에는, 판별 알고리즘(14a), (14b) 중 어느 하나에 의한 판별 결과를 채용한다. 소정의 특징량은, 예를 들면 코어의 외경이다. 이 방식에 있어서, 한 쌍의 광파이버 F1, F2의 광축 방향에 있어서의, 적어도 2회 분의 촬상 데이터 PX, PY의 촬상 위치는, 서로 같아도 좋고, 또는 서로 달라도 좋다. 촬상 위치가 서로 다른 촬상 데이터 PX, PY는, 예를 들면 촬상부(12)를 촬상할 때마다 한 쌍의 광파이버 F1, F2의 광축 방향으로 이동시키는 것에 의해 얻어진다.
(방식 D)
이 방식에 있어서도, 우선, 촬상부(12)가, 한 쌍의 광파이버 F1, F2를 적어도 2회 촬상하여, 적어도 2회 분의 촬상 데이터 PX, PY를 생성한다. 특징량 추출부(13)는, 적어도 2회 분의 촬상 데이터 PX, PY로부터, 복수의 특징량으로 이루어지는 적어도 2개의 특징량군을 추출한다. 판별부(14)는, 적어도 2개의 특징량군에 근거하여, 판별 알고리즘(14a), (14b)의 양쪽을 실행한다. 판별부(14)는, 제 1 판별 알고리즘(14a)에 의해 얻어지는 적어도 2개의 판별 결과와, 제 2 판별 알고리즘(14b)에 의해 얻어지는 적어도 2개의 판별 결과 중, 판별 결과의 격차가 작은 쪽을 채용한다. 이 방식에 있어서도, 한 쌍의 광파이버 F1, F2의 광축 방향에 있어서의, 적어도 2회 분의 촬상 데이터 PX, PY의 촬상 위치는, 서로 같아도 좋고, 또는 서로 달라도 좋다.
판별부(14)에 의해 채용된 판별 결과는, 모니터(5)에 표시된다. 사용자는, 모니터(5)에 표시된 한 쌍의 광파이버 각각의 종류가 잘못인 경우, 올바른 종류를 입력 장치(10d)를 통하여 입력하여, 판별 결과를 정정한다. 이 경우, 판별부(14)는 오판별을 한 것으로 되고, 이 정정은, 전술한 각 판별 알고리즘(14a), (14b)의 판별 정밀도에 피드백된다. 혹은, 사용자는, 판별부(14)에 의한 판별 결과에 관계없이, 한 쌍의 광파이버 각각의 종류를 입력 장치(10d)를 통하여 입력해도 좋다. 그 경우, 사용자에 의한 입력이 우선하여 채용되고, 한 쌍의 광파이버 각각의 종류가 특정된다. 혹은, 광파이버의 종류마다 미리 설정된 제조 조건 중 하나를 선택하는 것으로, 대응하는 광파이버의 종류 그 자체의 입력을 대신해도 좋다. 이 경우에 있어서도, 각 판별 알고리즘(14a), (14b)의 판별 결과의 정오(正誤)가 판별 정밀도에 피드백된다.
융착 제어부(15)는, 접속부(3)의 동작을 제어한다. 즉, 융착 제어부(15)는, 사용자에 의한 스위치의 조작을 받아, 접속부(3)에 있어서의 한 쌍의 광파이버의 선단끼리의 접촉 동작 및 아크 방전을 제어한다. 한 쌍의 광파이버의 선단끼리의 접촉 동작에는, 파이버 위치 결정부(3b)에 의한 광파이버의 위치 결정 처리, 즉 각 광파이버의 선단 위치의 제어가 포함된다. 아크 방전의 제어에는, 방전 파워, 방전 개시 타이밍 및 방전 종료 타이밍의 제어가 포함된다. 광파이버의 선단 위치 및 방전 파워와 같은 각종의 접속 조건은, 한 쌍의 광파이버의 종류의 조합마다 미리 설정되어 있고, 예를 들면 ROM(10c)에 저장되어 있다. 융착 제어부(15)는, 판별부(14)에 의해 판별된, 또는 사용자에 의해 입력된 한 쌍의 광파이버의 종류의 조합에 따라, 접속 조건을 선택한다. 즉, 접속부(3)는, 판별부(14)에 있어서의 판별 결과 또는 사용자에 의한 입력 결과에 근거하여, 한 쌍의 광파이버의 종류의 조합을 인식하고, 그 조합에 따른 접속 조건으로, 한 쌍의 광파이버를 서로 융착 접속한다.
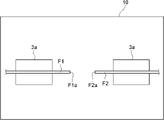
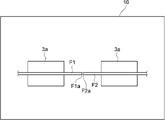
접속부(3)의 동작은 다음과 같다. 우선, 도 6에 나타나는 바와 같이, 사용자가, 접속 대상인 한 쌍의 광파이버 F1 및 F2를, 각각 광파이버 홀더(3a)에 유지시킨다. 이때, 광파이버 F1의 단면 F1a와, 광파이버 F2의 단면 F2a가, 서로 대향하여 배치된다. 다음에, 사용자가, 융착 접속기(10)에 융착 접속의 개시를 지시한다. 이 지시는, 예를 들면 스위치 입력을 통하여 행해진다. 이 지시를 받아, 도 7에 나타내는 바와 같이, 융착 제어부(15)가, 접속 조건으로서 설정된 단면 F1a, F2a의 위치에 근거하여, 광파이버 F1, F2의 위치 결정을 행한다. 그 후, 도 8에 나타내는 바와 같이, 융착 제어부(15)가, 한 쌍의 방전 전극(3c) 간의 아크 방전을 개시한다.
아크 방전의 개시 직후는, 단면 F1a, F2a가 서로 떨어져 있다. 그 아크 방전은, 단면 F1a, F2a를 융착 전에 미리 연화시키기 위한 예비 방전에 상당한다. 아크 방전이 개시되면, 융착 제어부(15)는, 파이버 위치 결정부(3b)의 위치를 제어하는 것에 의해, 단면 F1a, F2a를 서로 가까이 하여 서로 접촉시킨다. 그리고, 융착 제어부(15)는, 아크 방전을 계속하는 것에 의해 본 방전을 행한다. 이것에 의해, 단면 F1a, F2a가 더욱 연화하여, 서로 융착한다.
본 실시 형태에 있어서, 접속 조건에는, 방전 개시 전에 있어서의 단면 F1a, F2a의 위치, 방전 개시 전에 있어서의 각 단면 F1a, F2a끼리의 간격, 예비 방전 시간, 본 방전 시간, 단면 F1a, F2a끼리가 접한 후의 압입량, 단면 F1a, F2a끼리를 압입한 후의 되돌림 양, 예비 방전 파워, 본 방전 파워, 및 되돌림 시의 방전 파워 중 적어도 하나가 포함된다.
방전 개시 전에 있어서의 각 단면 F1a, F2a의 위치란, 도 7에 나타난 상태, 즉 예비 방전의 개시 시점에 있어서의, 한 쌍의 방전 전극(3c)의 중심축을 잇는 선 즉 방전 중심축을 기준으로 한 각 단면 F1a, F2a의 위치를 말한다. 이들 단면 위치에 따라, 방전 중심축과 각 단면 F1a, F2a의 거리가 바뀐다. 이것에 의해 가열량 즉 용융량이 증감한다. 더하여, 또 단면 F1a, F2a끼리가 접촉할 때까지의 이동에 필요로 하는 시간이 변화한다. 방전 개시 전에 있어서의 각 단면 F1a, F2a끼리의 간격이란, 도 7에 나타난 상태, 즉 예비 방전의 개시 시점에 있어서의 단면 F1a, F2a끼리의 간격을 말한다. 이 간격에 따라, 단면 F1a, F2a끼리가 접촉할 때까지의 이동에 필요로 하는 시간이 변화한다. 예비 방전 시간이란, 도 7에 나타난 상태에서 아크 방전을 개시하고 나서, 단면 F1a, F2a끼리를 접촉시키기 위해서 광파이버 F1, F2의 상대적인 이동을 개시할 때까지의 시간을 말한다. 본 방전 시간이란, 단면 F1a, F2a끼리가 접촉하고 나서, 아크 방전을 종료할 때까지의 시간, 바꾸어 말하면, 한 쌍의 방전 전극(3c)으로의 전압의 인가를 정지할 때까지의 시간을 말한다. 예비 방전과 본 방전은, 시간적으로 연속하여 행해진다. 단면 F1a, F2a끼리가 접한 후의 압입량이란, 광파이버 F1, F2를 상대적으로 이동시켜 단면 F1a, F2a끼리를 접촉시키고 나서, 방전 중에 있어서 같은 방향으로 광파이버 F1, F2를 상대적으로 더 이동시킬 때의 광파이버 홀더(3a)의 이동 거리를 말한다. 단면 F1a, F2a끼리를 압입한 후의 되돌림 양이란, 단면 F1a, F2a끼리를 접촉시킨 후, 단면 F1a, F2a를 더 압입하고 나서, 방전 중에 있어서 역방향, 즉 단면 F1a, F2a끼리가 떨어지는 방향으로 광파이버 F1, F2를 상대적으로 이동시킬 때의 각 광파이버 홀더(3a)의 이동 거리를 말한다. 예비 방전 파워란, 도 7에 나타난 상태에서 아크 방전을 개시하고 나서, 단면 F1a, F2a끼리를 접촉시키기 위해서 광파이버 F1, F2의 상대적인 이동을 개시할 때까지의 기간에 있어서의 아크 방전 파워를 말한다.
여기서, 도 9는, 한쪽의 광파이버 F2의 단면 F2a를 정면 즉 광축 방향에서 본 도면이다. 도면 중의 화살표 MSX 및 MSY는, 촬상부(12)에 의한 촬상 방향을 나타내고 있다. 즉, 이 예에서는 촬상부(12)가 적어도 2개 설치되고, 2개의 촬상부(12)가, 광파이버 F1, F2의 지름 방향으로 서로 직교하는 방향에서 단면 F1a, F2a를 각각 촬상한다. 광파이버 F1, F2를 사이에 두고 촬상부(12)와 대향하는 위치에는, 광파이버 F1, F2를 조명하기 위한 광원이 배치된다. 광원은 예를 들면 발광 다이오드이다.
도 10은, 방향 MSX에서 촬상하는 촬상부(12)에 있어서 얻어지는 촬상 데이터 PX와, 방향 MSY에서 촬상하는 촬상부(12)에 있어서 얻어지는 촬상 데이터 PY를 모식적으로 나타내는 도면이다. 도 10에 나타나는 바와 같이, 이들 촬상 데이터 PX, PY에 있어서, 광파이버 F1, F2의 위치 및 형상은, 코어 CR 및 클래드 CL의 윤곽에 의해 확인된다. 코어 CR은, 광원으로부터의 조명 광에 의해 밝아진다. 클래드 CL는, 광원으로부터의 조명 광의 굴절에 의해 어두워진다.
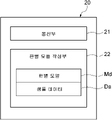
도 11은, 모델 작성 장치(20)의 기능적인 구성을 나타내는 블럭도이다. 도 12는, 모델 작성 장치(20)의 하드웨어 구성을 나타내는 블럭도이다. 도 11에 나타내는 바와 같이, 모델 작성 장치(20)는, 기능적으로는, 통신부(21) 및 판별 모델 작성부(22)를 구비한다. 모델 작성 장치(20)는, 도 12에 나타나는 바와 같이, CPU(20a), RAM(20b), ROM(20c), 입력 장치(20d), 통신 모듈(20e), 보조 기억 장치(20f), 및 출력 장치(20g) 등의 하드웨어를 구비하는 컴퓨터를 포함한다. 이들 구성 요소가 프로그램 등에 의해 동작하는 것에 의해, 모델 작성 장치(20)의 각 기능이 실현된다.
도 11에 나타나는 통신부(21)는, 인터넷 등의 정보 통신망(30)(도 1을 참조)을 통하여 복수의 융착 접속기(10)와의 사이에서 통신을 행한다. 통신부(21)는, 정보 통신망(30)을 통하여, 복수의 융착 접속기(10)로부터, 촬상 데이터 PX, PY로부터 추출된 특징량, 및 광파이버 F1, F2의 종류에 관한 정보를 수신한다. 통신부(21)는, 촬상 데이터 PX, PY로부터 추출된 특징량을 대신하여, 촬상 데이터 PX, PY 그 자체를 수신해도 좋다. 그 경우, 모델 작성 장치(20)가 촬상 데이터 PX, PY로부터 특징량을 추출한다. 광파이버 F1, F2의 종류에 관한 정보는, 사용자에 의해 입력된 정보만이어도 좋다. 바꾸어 말하면, 통신부(21)는, 사용자에 의해 입력된 광파이버 F1, F2의 종류에 관한 정보와, 광파이버 F1, F2의 촬상 데이터 PX, PY로부터 추출된 특징량 또는 촬상 데이터 그 자체를, 각 융착 접속기(10)로부터 수신한다. 사용자에 의해 입력된 광파이버 F1, F2의 종류에 관한 정보는, 광파이버 F1, F2의 종류 그 자체의 입력을 대신하여, 광파이버 F1, F2의 종류마다 미리 설정된 제조 조건 중 하나를 선택하는 경우를 포함한다. 통신부(21)는, 수신한 이들 정보를, 광파이버 F1, F2의 촬상 데이터 PX, PY로부터 얻어지는 특징량과, 광파이버 F1, F2의 종류의 대응 관계를 나타내는 샘플 데이터 Da로서, 판별 모델 작성부(22)에 제공한다.
판별 모델 작성부(22)는, 통신부(21)로부터 제공된 샘플 데이터 Da를 이용하여 기계 학습을 행한다. 그리고, 판별 모델 작성부(22)는, 촬상 데이터 PX, PY에 근거하여 광파이버 F1, F2의 종류를 판별하기 위한 판별 모델 Md를 작성한다. 기계 학습은, 바람직하게는 심층 학습(딥 러닝)이다. 기계 학습의 기법으로서는, 예를 들면 뉴럴 네트워크, 서포트 벡터 머신 등, 이른바 지도 학습에 포함되는 여러 가지 기법을 적용할 수 있다. 판별 모델 작성부(22)는, 가동 중인 다수의 융착 접속기(10)로부터 얻어지는 방대한 샘플 데이터 Da를 이용하여 기계 학습을 계속적으로 행하여, 판별 모델 Md의 정밀도를 높인다. 본 실시 형태의 판별 모델 작성부(22)는, 복수의 융착 접속기(10)를, 촬상 데이터 PX, PY의 경향이 유사하다고 추정되는 둘 이상의 그룹으로 분류한다. 그리고, 판별 모델 작성부(22)는, 그룹마다 샘플 데이터 Da를 모아, 판별 모델 Md를 그룹마다 작성한다. 판별 모델 Md를 그룹마다 작성한다는 것은, 어느 그룹에 속하는 복수의 융착 접속기(10)로부터 얻어지는 샘플 데이터 Da만을 이용하여 기계 학습을 행하고, 작성된 판별 모델 Md를, 그 그룹에 속하는 융착 접속기(10)에만 제공하는 것을 의미한다.
촬상 데이터 PX, PY의 경향이 유사하다고 추정되는 2 이상의 그룹은, 예를 들면, 융착 접속기(10)의 검사 결과의 유사성, 융착 접속기(10)의 검사 조건의 유사성, 융착 접속기(10)의 제조자 및 제조 일시의 유사성, 촬상부(12)의 제조자 및 제조 일시의 유사성, 융착 접속기(10)의 사용 장소에 있어서의 환경 조건의 유사성, 융착 접속기(10)의 열화 상태의 유사성, 및, 접속 대상 광파이버의 종류의 유사성, 등에 기초를 두어 분류된다. 융착 접속기(10)의 검사 결과의 유사성은, 예를 들면 촬상 데이터 PX, PY에 있어서의 휘도 분포 등의 유사성이다. 융착 접속기(10)의 검사 조건의 유사성은, 융착 접속기(10)의 검사 시에 기준이 되는 광파이버를 촬상했을 때의 환경 조건의 유사성으로서, 예를 들면, 기준이 되는 광파이버를 촬상했을 때의 온도(기온), 습도, 및 기압 중 적어도 1개의 유사성이다. 융착 접속기(10)의 사용 장소에 있어서의 환경 조건의 유사성은, 예를 들면, 융착 접속기(10)의 사용 장소에 있어서의 온도, 습도, 및 기압 중 적어도 1개의 유사성이다. 융착 접속기(10)의 열화 상태의 유사성은, 예를 들면, 융착 접속기(10)의 방전 횟수, 접속 빈도, 방전 전극(3c)의 오염 상태, 촬상부(12)의 반대 측으로부터 광파이버를 조명하는 광원의 조광 상태, 촬상부(12)의 관찰용 광학부의 오염 상태, 및 기기 진단 결과 중 적어도 1개의 유사성이다.
이렇게 하여 그룹마다 샘플 데이터 Da를 모아 작성된 판별 모델 Md는, 통신부(21)를 통하여, 각각 대응하는 그룹에 속하는 융착 접속기(10)에 송신되어 제공된다. 각 융착 접속기(10)의 판별부(14)의 제 2 판별 알고리즘(14b)은, 그 각 융착 접속기(10)가 속하는 그룹에 대응하는 판별 모델 Md를 모델 작성 장치(20)로부터 얻어, 한 쌍의 광파이버 F1, F2 각각의 종류를 판별한다.
판별 모델 작성부(22)의 기계 학습에 제공되는 샘플 데이터 Da에는, 제 1 판별 알고리즘(14a)에 의해 한 쌍의 광파이버 F1, F2 각각의 종류를 판별할 수 있었을 때의 샘플 데이터와, 제 1 판별 알고리즘(14a)에 의해 한 쌍의 광파이버 F1, F2 각각의 종류를 판별할 수 없었을 때 및 오판별했을 때의 샘플 데이터의 양쪽이 포함된다. 혹은, 판별 모델 작성부(22)의 기계 학습에 제공되는 샘플 데이터 Da에는, 제 1 판별 알고리즘(14a)에 의해 한 쌍의 광파이버 F1, F2 각각의 종류를 판별할 수 있었을 때의 샘플 데이터만이 포함되어도 좋다. 그 경우, 각 융착 접속기(10)의 판별부(14)는, 제 1 판별 알고리즘(14a)에 의해 한 쌍의 광파이버 F1, F2 각각의 종류를 판별할 수 없었을 때 및 오판별했을 때의 자신의 샘플 데이터를 이용하여 추가의 기계 학습을 행하여, 자신이 보유하는 판별 모델 Md를 개량한다.
판별 모델 작성부(22)의 기계 학습에 제공되는 샘플 데이터 Da에는, 제 1 판별 알고리즘(14a)에 의해 한 쌍의 광파이버 F1, F2 각각의 종류를 판별할 수 있었을 때의 샘플 데이터와, 제 1 판별 알고리즘(14a)에 의해 한 쌍의 광파이버 F1, F2 각각의 종류를 판별할 수 없었을 때 및 오판별했을 때의 샘플 데이터의 양쪽이 포함되어도 좋다. 그 경우, 각 융착 접속기(10)의 판별부(14)는, 제 1 판별 알고리즘(14a)에 의해 한 쌍의 광파이버 F1, F2 각각의 종류를 판별할 수 없었을 때 및 오판별했을 때의 자신의 샘플 데이터를 이용하여 추가의 기계 학습을 행하여, 자신이 보유하는 판별 모델 Md를 개량해도 좋다. 단, 추가의 기계 학습에 이용하는 샘플 데이터에는, 모델 작성 장치(20)에 제공한 샘플 데이터 Da는 포함되지 않는다. 이 경우, 융착 접속기(10)의 출하로부터 어느 기간 또는 개수까지의, 판별할 수 없었던 및 오판별한 샘플 데이터에 대해서는 판별 모델 작성부(22)의 기계 학습에 제공해도 좋다. 그리고, 그 이후의 판별할 수 없었던 및 오판별한 샘플 데이터에 대해서는, 각 융착 접속기(10)의 판별부(14)에 있어서의 추가의 기계 학습에 제공해도 좋다.
도 13은, 본 실시 형태에 따른, 광파이버를 융착 접속하는 방법을 나타내는 흐름도이다. 이 방법은, 상술한 융착 접속 시스템(1A)을 이용하여 매우 적합하게 실현될 수 있다. 우선, 모델 작성 공정 ST1로서, 광파이버의 촬상 데이터로부터 얻어지는 복수의 특징량과 그 광파이버의 종류의 대응 관계를 나타내는 샘플 데이터 Da를 이용하여 기계 학습을 행한다. 그리고, 접속하려고 하는 광파이버 F1, F2의 종류를 광파이버 F1, F2의 촬상 데이터 PX, PY에 근거하여 판별하기 위한 판별 모델 Md를 작성한다. 이 모델 작성 공정 ST1에서는, 복수의 융착 접속기(10)를, 촬상 데이터 PX, PY의 경향이 유사하다고 추정되는 둘 이상의 그룹으로 분류한다. 그리고, 그룹마다 샘플 데이터 Da를 모아 판별 모델 Md를 작성한다.
다음에, 촬상 공정 ST2로서, 한 쌍의 광파이버 F1, F2를 촬상하여 촬상 데이터 PX, PY를 생성한다. 계속하여, 판별 공정 ST3으로서, 촬상 공정 ST2에 있어서 생성된 촬상 데이터 PX, PY로부터 얻어지는 복수의 특징량에 근거하여, 한 쌍의 광파이버 F1, F2 각각의 종류를 판별한다. 이 판별 공정 ST3에서는, 광파이버 F1, F2의 종류를 판별하기 위한 판별 알고리즘(14a), (14b) 중 어느 하나에 의한 판별 결과를 채용한다. 전술한 바와 같이, 제 1 판별 알고리즘(14a)은, 광파이버 F1, F2의 촬상 데이터 PX, PY로부터 얻어지는 복수의 특징량과 광파이버 F1, F2의 종류의 상관에 근거하여, 기계 학습 이외의 방법에 의해 미리 규정된 것이다. 제 2 판별 알고리즘(14b)은, 모델 작성 공정 ST1에 있어서 작성된 판별 모델 Md를 포함한다. 판별 모델 Md는, 그 판별 공정 ST3을 행하는 융착 접속기(10)가 속하는 그룹에 대응하는 것이다. 계속하여, 접속 공정 ST4로서, 판별 공정 ST3에 있어서의 판별 결과에 근거하여, 한 쌍의 광파이버 F1, F2의 종류의 조합에 따른 접속 조건으로 한 쌍의 광파이버 F1, F2를 서로 융착 접속한다.
도 14에 나타내는 바와 같이, 상기의 방법에 있어서, 공정 ST5를 추가해도 좋다. 공정 ST5에서는, 판별 알고리즘(14a), (14b)마다 판별 정밀도를 측정한다. 이 공정 ST5는, 촬상 공정 ST2 또는 판별 공정 ST3의 전에 실시된다. 구체적으로는, 우선, 종류가 기지인 2 이상의 광파이버를 촬상부(12)에 의해 촬상하여, 촬상 데이터 PX, PY를 생성한다. 다음에, 특징량 추출부(13)에 있어서, 그 촬상 데이터 PX, PY로부터 복수의 특징량을 추출한다. 그리고, 복수의 특징량에 근거하여, 판별부(14)에 있어서 판별 알고리즘(14a), (14b)의 양쪽에 의해 상기 둘 이상의 광파이버의 종류를 판별하고, 판별 결과를 기지의 종류와 대조하여, 판별 알고리즘(14a), (14b) 각각의 판별 정밀도를 구한다. 판별 공정 ST3에서는, 판별 알고리즘(14a), (14b) 중, 공정 ST5에 있어서의 판별 정밀도가 높은 쪽을 채용한다.
이상으로 설명한 본 실시 형태의 융착 접속 시스템(1A), 융착 접속기(10), 및 융착 접속하는 방법에 의해 얻어지는 효과에 대해 설명한다. 본 실시 형태에서는, 판별 알고리즘(14a) 및 (14b)를 이용하여 광파이버 F1, F2의 종류를 판별한다. 이 중 제 1 판별 알고리즘(14a)은, 광파이버 F1, F2의 촬상 데이터로부터 얻어지는 복수의 특징량과 상기 광파이버 F1, F2의 종류의 상관에 근거하여 기계 학습 이외의 방법에 의해 미리 규정된 것으로, 종래와 동등의 판별 정밀도를 기대할 수 있다. 제 2 판별 알고리즘(14b)은, 복수의 특징량과 광파이버 F1, F2의 종류의 대응 관계를 나타내는 샘플 데이터 Da를 이용한 기계 학습에 의해 작성된 판별 모델 Md를 포함한다. 따라서, 제 1 판별 알고리즘(14a)으로 판별 불능 또는 오판별을 하기 쉬운 광파이버 F1, F2의 종류에 대해서, 기계 학습에 근거하는 고정밀의 판별을 기대할 수 있다. 고로, 본 실시 형태에 의하면, 판별 알고리즘(14a) 및 (14b) 중 어느 하나에 의한 판별 결과를 채용하는 것에 의해, 종래와 비교하여 광파이버 F1, F2의 종류의 판별 정밀도를 높일 수가 있다.
전술한 바와 같이, 기계 학습은 심층 학습이어도 좋다. 이 경우, 광파이버 F1, F2의 종류의 판별 정밀도를 더욱 높일 수가 있다.
전술한 바와 같이, 판별부(14)는(판별 공정 ST3에서는), 복수의 특징량에 포함되는 소정의 특징량이 임계값보다 큰 경우에 판별 알고리즘(14a) 및 (14b) 중 한쪽에 의한 판별 결과를 채용하고, 소정의 특징량이 임계값보다 작은 경우에 판별 알고리즘(14a) 및 (14b) 중 다른 쪽에 의한 판별 결과를 채용해도 좋다. 예를 들면 이러한 방식에 의해, 판별 알고리즘(14a) 및 (14b) 중 어느 하나의 판별 결과를 채용할지를 용이하게 선택할 수가 있다. 이 경우, 임계값은, 소정의 특징량이 변화했을 때의, 제 1 판별 알고리즘(14a)에 의한 판별 정밀도와 제 2 판별 알고리즘(14b)에 의한 판별 정밀도의 비교에 근거하여 결정된 값이어도 좋다. 이것에 의해, 광파이버 F1, F2의 종류의 판별 정밀도를 더욱 높일 수가 있다.
전술한 바와 같이, 판별부(14)는(판별 공정 ST3에서는), 제 1 판별 알고리즘(14a)에 의해 광파이버 F1, F2 각각의 종류를 판별할 수 있었던 경우에 그 판별 결과를 채용하고, 제 1 판별 알고리즘(14a)에 의해 광파이버 F1, F2 각각의 종류를 판별할 수 없었던 경우에 제 2 판별 알고리즘(14b)에 의한 판별 결과를 채용해도 좋다. 예를 들면 이러한 방식에 의해, 광파이버 F1, F2의 종류의 판별 정밀도를 높일 수가 있다. 이 경우, 판별부(14)는(판별 공정 ST3에서는), 먼저 제 1 판별 알고리즘(14a)을 실행하고, 제 1 판별 알고리즘(14a)에 의해 광파이버 F1, F2 각각의 종류를 판별할 수 없었던 경우에 제 2 판별 알고리즘(14b)을 실행해도 좋다. 이것에 의해, 판별부(14)의(판별 공정 ST3에 있어서의) 연산량을 저감할 수가 있다. 혹은, 판별부(14)는(판별 공정 ST3에서는), 제 1 판별 알고리즘(14a)과, 제 2 판별 알고리즘(14b)을 병행하여 실행해도 좋다. 이것에 의해, 최종적인 판별 결과를 얻을 때까지의 소요 시간을 단축할 수가 있다.
전술한 바와 같이, 촬상부(12)는(촬상 공정 ST2에서는), 한 쌍의 광파이버 F1, F2를 적어도 2회 촬상하여 적어도 2회 분의 촬상 데이터 PX, PY를 생성해도 좋다. 그리고, 판별부(14)는(판별 공정 ST3에서는), 적어도 2회 분의 촬상 데이터 PX, PY로부터 얻어지는, 복수의 특징량으로 이루어지는 적어도 2개의 특징량군 사이에 있어서의 소정의 특징량의 격차가 임계값보다 큰 경우에, 판별 알고리즘(14a), (14b) 중 한쪽에 의한 판별 결과를 채용해도 좋다. 판별부(14)는(판별 공정 ST3에서는), 소정의 특징량의 격차가 임계값보다 작은 경우에, 판별 알고리즘(14a), (14b) 중 어느 하나에 의한 판별 결과를 채용해도 좋다. 이것에 의해, 광파이버 F1, F2의 종류의 판별 정밀도를 더욱 높일 수가 있다.
전술한 바와 같이, 촬상부는(촬상 공정 ST2에서는), 한 쌍의 광파이버 F1, F2를 적어도 2회 촬상하여 적어도 2회 분의 촬상 데이터 PX, PY를 생성해도 좋다. 그리고, 판별부(14)는(판별 공정 ST3에서는), 적어도 2회 분의 촬상 데이터 PX, PY로부터 얻어지는, 복수의 특징량으로 이루어지는 적어도 2개의 특징량군에 근거하여 판별 알고리즘(14a), (14b)을 실행해도 좋다. 판별부(14)는(판별 공정 ST3에서는), 제 1 판별 알고리즘(14a)에 의한 적어도 2개의 판별 결과와, 제 2 판별 알고리즘(14b)에 의한 적어도 2개의 판별 결과 중, 판별 결과의 격차가 작은 쪽을 채용해도 좋다. 이것에 의해, 광파이버 F1, F2의 종류의 판별 정밀도를 더욱 높일 수가 있다.
전술한 바와 같이, 모델 작성 장치(20)는, 복수의 융착 접속기(10)를 촬상 데이터 PX, PY의 경향이 유사하다고 추정되는 둘 이상의 그룹으로 분류하여 그룹마다 판별 모델 Md를 작성해도 좋다. 그리고, 각 융착 접속기(10)의 판별부(14)의 제 2 판별 알고리즘(14b)은, 상기 각 융착 접속기(10)가 속하는 그룹에 대응하는 판별 모델 Md를 모델 작성 장치(20)로부터 얻어도 좋다. 이것에 의해, 촬상 데이터 PX, PY의 경향이 유사한 그룹 내, 예를 들면, 각 융착 접속기(10)의 기계적 및 구조적인 격차가 적은 그룹 내, 또는 촬상부(12)의 기계적 및 구조적인 격차가 적은 그룹 내로 한정하여 기계 학습을 행할 수가 있다. 고로, 제 2 판별 알고리즘(14b)에 의한 광파이버 F1, F2의 종류의 판별 정밀도를 더욱 높일 수가 있다.
전술한 바와 같이, 모델 작성 장치(20)의 기계 학습에 제공되는 샘플 데이터 Da에는, 제 1 판별 알고리즘(14a)에 의해 광파이버 F1, F2 각각의 종류를 판별할 수 있었을 때의 샘플 데이터와, 제 1 판별 알고리즘(14a)에 의해 광파이버 F1, F2 각각의 종류를 판별할 수 없었을 때 및 오판별했을 때의 샘플 데이터의 양쪽이 포함되어도 좋다. 이 경우, 제 1 판별 알고리즘(14a)의 약점인 광파이버 F1, F2의 종류를 모델 작성 장치(20)의 기계 학습에 포함할 수가 있어, 종합적인 광파이버 F1, F2의 종류의 판별 정밀도를 높일 수가 있다.
전술한 바와 같이, 모델 작성 장치(20)의 기계 학습에 제공되는 샘플 데이터 Da에는, 제 1 판별 알고리즘(14a)에 의해 광파이버 F1, F2 각각의 종류를 판별할 수 있었을 때의 샘플 데이터만이 포함되고, 각 융착 접속기(10)의 판별부(14)는, 제 1 판별 알고리즘(14a)에 의해 광파이버 F1, F2 각각의 종류를 판별할 수 없었을 때 및 오판별했을 때의 자신의 샘플 데이터를 이용하여 기계 학습을 행하여, 판별 모델 Md를 개량해도 좋다. 이 경우, 각 융착 접속기(10)의 기계적 및 구조적인 격차, 예를 들면 촬상부(12)의 기계적 및 구조적인 격차 등에 의해 제 1 판별 알고리즘(14a)에서는 판별할 수 없는 광파이버 F1, F2의 종류에 대해서, 제 2 판별 알고리즘(14b)의 판별 정밀도를 융착 접속기(10)마다 높일 수가 있다.
전술한 바와 같이, 모델 작성 장치(20)의 기계 학습에 제공되는 샘플 데이터 Da에는, 제 1 판별 알고리즘(14a)에 의해 광파이버 F1, F2 각각의 종류를 판별할 수 있었을 때의 샘플 데이터와, 제 1 판별 알고리즘(14a)에 의해 광파이버 F1, F2 각각의 종류를 판별할 수 없었을 때 및 오판별했을 때의 샘플 데이터가 포함되어도 좋다. 그리고, 각 융착 접속기(10)의 판별부(14)는, 제 1 판별 알고리즘(14a)에 의해 광파이버 F1, F2 각각의 종류를 판별할 수 없었을 때 및 오판별했을 때의 자신의 샘플 데이터를 이용하여 기계 학습을 행하여, 판별 모델 Md를 개량해도 좋다. 단, 모델 작성 장치(20)에 제공한 샘플 데이터를 제외한다. 이 경우, 제 1 판별 알고리즘(14a)의 약점인 광파이버 F1, F2의 종류를 모델 작성 장치(20)의 기계 학습에 포함할 수가 있다. 더하여, 각 융착 접속기(10)의 기계적 및 구조적인 격차, 예를 들면 촬상부(12)의 기계적 및 구조적인 격차 등에 의해 제 1 판별 알고리즘(14a)에서는 판별할 수 없는 광파이버 F1, F2의 종류에 대해서, 제 2 판별 알고리즘(14b)의 판별 정밀도를 융착 접속기(10)마다 높일 수가 있다. 고로, 종합적인 광파이버 F1, F2의 종류의 판별 정밀도를 보다 높일 수가 있다.
전술한 바와 같이, 종류가 기지인 둘 이상의 광파이버를 촬상하여 촬상 데이터 PX, PY를 생성하고, 그 촬상 데이터 PX, PY로부터 얻어지는 복수의 특징량에 근거하여, 판별 알고리즘(14a), (14b)에 의해 둘 이상의 광파이버의 종류를 판별해도 좋다. 그리고, 판별 알고리즘(14a), (14b) 중 판별 정밀도가 높은 쪽을, 판별 공정 ST3에 있어서 채용해도 좋다. 이것에 의해, 광파이버 F1, F2의 종류의 판별 정밀도를 더욱 높일 수가 있다.
본 개시에 의한 융착 접속기, 융착 접속 시스템, 및 광파이버를 융착 접속하는 방법은, 상술한 실시 형태에 한정되는 것은 아니고, 그 밖에 여러 가지 변형이 가능하다. 예를 들면, 상기 실시 형태의 융착 접속기(10)에서는, 제 2 판별 알고리즘(14b)의 판별 결과를 채용하는 기준으로서, 제 1 판별 알고리즘(14a)에 의해 판별할 수 없었던 경우, 및 제 1 판별 알고리즘(14a)에 의한 판별 결과가 잘못일 우려가 높은 경우를 예시했다. 종합적인 판별 정밀도를 높일 수 있는 것이면 다른 기준을 이용하여도 좋다.
상기 실시 형태의 융착 접속기(10)에서는, 한 쌍의 광파이버의 종류의 조합에 따른 접속 조건으로 한 쌍의 광파이버를 서로 융착 접속하기 위해서 판별 알고리즘(14a), (14b) 중 어느 하나를 이용하고 있지만, 더하여, 한 쌍의 광파이버의 종류를 판별한 후에 한 쌍의 광파이버를 조심(alignment)할 때에, 예를 들면 코어의 위치를 인식하기 위해서, 판별 알고리즘(14a), (14b) 중 어느 하나를 이용하여도 좋다.
1A…융착 접속 시스템
2…케이스
3…접속부
3a…광파이버 홀더
3b…파이버 위치 결정부
3c…방전 전극
4…가열기
5…모니터
6…방풍 커버
6a…측면
6b…도입구
10…융착 접속기
10a…CPU
10b…RAM
10c…ROM
10d…입력 장치
10e…보조 기억 장치
10f…출력 장치
11…통신부
12…촬상부
13…특징량 추출부
14…판별부
14a…제 1 판별 알고리즘
14b…제 2 판별 알고리즘
15…융착 제어부
20…모델 작성 장치
20a…CPU
20b…RAM
20c…ROM
20d…입력 장치
20e…통신 모듈
20f…보조 기억 장치
20g…출력 장치
21…통신부
22…판별 모델 작성부
30…정보 통신망
CL…클래드
CR…코어
Da…샘플 데이터
F1, F2…광파이버
F1a, F2a…단면
Md…판별 모델
MSX, MSY…방향
PX, PY…촬상 데이터
ST1…모델 작성 공정
ST2…촬상 공정
ST3…판별 공정
ST4…접속 공정
2…케이스
3…접속부
3a…광파이버 홀더
3b…파이버 위치 결정부
3c…방전 전극
4…가열기
5…모니터
6…방풍 커버
6a…측면
6b…도입구
10…융착 접속기
10a…CPU
10b…RAM
10c…ROM
10d…입력 장치
10e…보조 기억 장치
10f…출력 장치
11…통신부
12…촬상부
13…특징량 추출부
14…판별부
14a…제 1 판별 알고리즘
14b…제 2 판별 알고리즘
15…융착 제어부
20…모델 작성 장치
20a…CPU
20b…RAM
20c…ROM
20d…입력 장치
20e…통신 모듈
20f…보조 기억 장치
20g…출력 장치
21…통신부
22…판별 모델 작성부
30…정보 통신망
CL…클래드
CR…코어
Da…샘플 데이터
F1, F2…광파이버
F1a, F2a…단면
Md…판별 모델
MSX, MSY…방향
PX, PY…촬상 데이터
ST1…모델 작성 공정
ST2…촬상 공정
ST3…판별 공정
ST4…접속 공정
Claims (18)
- 한 쌍의 광파이버를 촬상하여 촬상 데이터를 생성하는 촬상부와,
상기 촬상부로부터 제공된 촬상 데이터로부터 얻어지는 복수의 특징량에 근거하여 상기 한 쌍의 광파이버 각각의 종류를 판별하는 판별부로서, 광파이버의 종류를 판별하기 위한 제 1 및 제 2 판별 알고리즘을 갖고, 상기 제 1 및 제 2 판별 알고리즘 중 어느 하나에 의한 판별 결과를 채용하고, 상기 제 1 판별 알고리즘은 광파이버의 촬상 데이터로부터 얻어지는 복수의 특징량과 상기 특징량을 얻은 광파이버의 종류의 상관에 근거하여 기계 학습 이외의 방법에 의해 미리 규정된 것이고, 상기 제 2 판별 알고리즘은 접속하려고 하는 광파이버의 종류를 상기 접속하려고 하는 광파이버의 촬상 데이터에 근거하여 판별하기 위한 판별 모델을 포함하고, 상기 판별 모델은 광파이버의 촬상 데이터로부터 얻어지는 복수의 특징량과 상기 특징량을 얻은 광파이버의 종류의 대응 관계를 나타내는 샘플 데이터를 이용한 기계 학습에 의해 작성된 것인 상기 판별부와,
상기 판별부에 있어서의 판별 결과에 근거하여, 상기 한 쌍의 광파이버의 종류의 조합에 따른 접속 조건으로 상기 한 쌍의 광파이버를 서로 융착 접속하는 접속부
를 구비하는, 융착 접속기. - 제 1 항에 있어서,
상기 기계 학습은 심층 학습인, 융착 접속기. - 제 1 항 또는 제 2 항에 있어서,
상기 판별부는, 상기 복수의 특징량에 포함되는 소정의 특징량이 임계값보다 큰 경우에 상기 제 1 및 제 2 판별 알고리즘 중 한쪽에 의한 판별 결과를 채용하고, 상기 소정의 특징량이 임계값보다 작은 경우에 상기 제 1 및 제 2 판별 알고리즘 중 다른 쪽에 의한 판별 결과를 채용하는, 융착 접속기. - 제 3 항에 있어서,
상기 임계값은, 상기 소정의 특징량이 변화했을 때의, 상기 제 1 판별 알고리즘에 의한 판별 정밀도와 상기 제 2 판별 알고리즘에 의한 판별 정밀도의 비교에 근거하여 결정된 값인, 융착 접속기. - 제 1 항 또는 제 2 항에 있어서,
상기 판별부는, 상기 제 1 판별 알고리즘에 의해 상기 한 쌍의 광파이버 각각의 종류를 판별할 수 있었던 경우에 그 판별 결과를 채용하고, 상기 제 1 판별 알고리즘에 의해 상기 한 쌍의 광파이버 각각의 종류를 판별할 수 없었던 경우에 상기 제 2 판별 알고리즘에 의한 판별 결과를 채용하는, 융착 접속기. - 제 5 항에 있어서,
상기 판별부는, 먼저 상기 제 1 판별 알고리즘을 실행하고, 상기 제 1 판별 알고리즘에 의해 상기 한 쌍의 광파이버 각각의 종류를 판별할 수 없었던 경우에 상기 제 2 판별 알고리즘을 실행하는, 융착 접속기. - 제 5 항에 있어서,
상기 판별부는, 상기 제 1 판별 알고리즘과, 상기 제 2 판별 알고리즘을 병행하여 실행하는, 융착 접속기. - 제 1 항 또는 제 2 항에 있어서,
상기 촬상부는, 상기 한 쌍의 광파이버를 적어도 2회 촬상하여 적어도 2회 분의 촬상 데이터를 생성하고,
상기 판별부는, 상기 촬상부로부터 제공된 적어도 2회 분의 촬상 데이터로부터 얻어지는, 상기 복수의 특징량으로 이루어지는 적어도 2개의 특징량군 사이에 있어서의 소정의 특징량의 격차가 임계값보다 큰 경우에 상기 제 1 및 제 2 판별 알고리즘 중 한쪽에 의한 판별 결과를 채용하고, 상기 소정의 특징량의 격차가 임계값보다 작은 경우에 상기 제 1 및 제 2 판별 알고리즘 중 어느 하나에 의한 판별 결과를 채용하는, 융착 접속기. - 제 1 항 또는 제 2 항에 있어서,
상기 촬상부는, 상기 한 쌍의 광파이버를 적어도 2회 촬상하여 적어도 2회 분의 촬상 데이터를 생성하고,
상기 판별부는, 상기 촬상부로부터 제공된 적어도 2회 분의 촬상 데이터로부터 얻어지는, 상기 복수의 특징량으로 이루어지는 적어도 2개의 특징량군에 근거하여 상기 제 1 및 제 2 판별 알고리즘을 실행하고, 상기 제 1 판별 알고리즘에 의한 적어도 2개의 판별 결과와, 상기 제 2 판별 알고리즘에 의한 적어도 2개의 판별 결과 중, 판별 결과의 격차가 작은 쪽을 채용하는, 융착 접속기. - 제 8 항 또는 제 9 항에 있어서,
상기 한 쌍의 광파이버의 광축 방향에 있어서의, 상기 적어도 2회 분의 촬상 데이터의 촬상 위치가 서로 같은, 융착 접속기. - 제 8 항 또는 제 9 항에 있어서,
상기 한 쌍의 광파이버의 광축 방향에 있어서의, 상기 적어도 2회 분의 촬상 데이터의 촬상 위치가 서로 다른, 융착 접속기. - 청구항 1 내지 청구항 6 중 어느 한 항에 기재된 융착 접속기인 복수의 융착 접속기와,
상기 복수의 융착 접속기로부터 상기 샘플 데이터를 모아 상기 기계 학습을 행하여 상기 판별 모델을 작성하고, 상기 판별 모델을 상기 복수의 융착 접속기에 제공하는 모델 작성 장치
를 구비하는, 융착 접속 시스템. - 제 12 항에 있어서,
상기 모델 작성 장치는, 상기 복수의 융착 접속기를 촬상 데이터의 경향이 유사하다고 추정되는 둘 이상의 그룹으로 분류하여 그룹마다 상기 판별 모델을 작성하고,
각 융착 접속기의 상기 판별부의 상기 제 2 판별 알고리즘은, 상기 각 융착 접속기가 속하는 상기 그룹에 대응하는 상기 판별 모델을 상기 모델 작성 장치로부터 얻는, 융착 접속 시스템. - 제 12 항 또는 제 13 항에 있어서,
상기 모델 작성 장치의 상기 기계 학습에 제공되는 상기 샘플 데이터에는, 상기 제 1 판별 알고리즘에 의해 상기 한 쌍의 광파이버 각각의 종류를 판별할 수 있었을 때의 상기 샘플 데이터와, 상기 제 1 판별 알고리즘에 의해 상기 한 쌍의 광파이버 각각의 종류를 판별할 수 없었을 때 및 오판별했을 때의 상기 샘플 데이터의 양쪽이 포함되는, 융착 접속 시스템. - 제 12 항 또는 제 13 항에 있어서,
상기 모델 작성 장치의 상기 기계 학습에 제공되는 상기 샘플 데이터에는, 상기 제 1 판별 알고리즘에 의해 상기 한 쌍의 광파이버 각각의 종류를 판별할 수 있었을 때의 상기 샘플 데이터만이 포함되고,
각 융착 접속기의 상기 판별부는, 상기 제 1 판별 알고리즘에 의해 상기 한 쌍의 광파이버 각각의 종류를 판별할 수 없었을 때 및 오판별했을 때의 자신의 상기 샘플 데이터를 이용하여 상기 기계 학습을 행하여 상기 판별 모델을 개량하는, 융착 접속 시스템. - 제 12 항 또는 제 13 항에 있어서,
상기 모델 작성 장치의 상기 기계 학습에 제공되는 상기 샘플 데이터에는, 상기 제 1 판별 알고리즘에 의해 상기 한 쌍의 광파이버 각각의 종류를 판별할 수 있었을 때의 상기 샘플 데이터와, 상기 제 1 판별 알고리즘에 의해 상기 한 쌍의 광파이버 각각의 종류를 판별할 수 없었을 때 및 오판별했을 때의 상기 샘플 데이터의 양쪽이 포함되고,
각 융착 접속기의 상기 판별부는, 상기 제 1 판별 알고리즘에 의해 상기 한 쌍의 광파이버 각각의 종류를 판별할 수 없었을 때의 자신의 상기 샘플 데이터(단, 상기 모델 작성 장치에 제공한 상기 샘플 데이터를 제외한다)를 이용하여 상기 기계 학습을 행하여 상기 판별 모델을 개량하는, 융착 접속 시스템. - 한 쌍의 광파이버를 촬상하여 촬상 데이터를 생성하는 공정과,
상기 생성하는 공정에 있어서 취득된 촬상 데이터로부터 얻어지는 복수의 특징량에 근거하여 상기 한 쌍의 광파이버 각각의 종류를 판별하는 공정으로서, 광파이버의 종류를 판별하기 위한 제 1 및 제 2 판별 알고리즘 중 어느 하나에 의한 판별 결과를 채용하고, 상기 제 1 판별 알고리즘은 광파이버의 촬상 데이터로부터 얻어지는 복수의 특징량과 상기 특징량을 얻은 광파이버의 종류의 상관에 근거하여 기계 학습 이외의 방법에 의해 미리 규정된 것이고, 상기 제 2 판별 알고리즘은 접속하려고 하는 광파이버의 종류를 상기 접속하려고 하는 광파이버의 촬상 데이터에 근거하여 판별하기 위한 판별 모델을 포함하고, 상기 판별 모델은 광파이버의 촬상 데이터로부터 얻어지는 복수의 특징량과 상기 특징량을 얻은 광파이버의 종류의 대응 관계를 나타내는 샘플 데이터를 이용한 기계 학습에 의해 작성된 것인 공정과,
상기 판별하는 공정에 있어서의 판별 결과에 근거하여, 상기 한 쌍의 광파이버의 종류의 조합에 따른 접속 조건으로 상기 한 쌍의 광파이버를 서로 융착 접속하는 공정
을 포함하는, 광파이버를 융착 접속하는 방법. - 제 17 항에 있어서,
종류가 기지인 둘 이상의 광파이버를 촬상하여 촬상 데이터를 생성하고, 그 촬상 데이터로부터 얻어지는 복수의 특징량에 근거하여, 상기 제 1 및 제 2 판별 알고리즘에 의해 상기 둘 이상의 광파이버의 종류를 판별하고, 상기 제 1 및 제 2 판별 알고리즘 중 판별 정밀도가 높은 쪽을 상기 판별하는 공정에 있어서 채용하는, 광파이버를 융착 접속하는 방법.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JPPCT/JP2020/016859 | 2020-04-17 | ||
| PCT/JP2020/016859 WO2021210161A1 (ja) | 2020-04-17 | 2020-04-17 | 融着接続機、融着接続システム、及び光ファイバを融着接続する方法 |
| PCT/JP2021/015225 WO2021210552A1 (ja) | 2020-04-17 | 2021-04-12 | 融着接続機、融着接続システム、及び光ファイバを融着接続する方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20230006829A true KR20230006829A (ko) | 2023-01-11 |
Family
ID=78084303
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020227039187A Pending KR20230006829A (ko) | 2020-04-17 | 2021-04-12 | 융착 접속기, 융착 접속 시스템, 및 광파이버를 융착 접속하는 방법 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20230185026A1 (ko) |
| EP (1) | EP4137852A4 (ko) |
| JP (1) | JP7648039B2 (ko) |
| KR (1) | KR20230006829A (ko) |
| CN (1) | CN115398293A (ko) |
| WO (2) | WO2021210161A1 (ko) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20240019633A1 (en) * | 2022-07-15 | 2024-01-18 | At&T Intellectual Property I, L.P. | Apparatuses and methods for facilitiating hollow core fiber splicing evacuation |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002169050A (ja) | 2000-12-05 | 2002-06-14 | Sumitomo Electric Ind Ltd | 融着接続装置および融着接続方法 |
| JP2020020997A (ja) | 2018-08-02 | 2020-02-06 | 古河電気工業株式会社 | 融着接続システム、融着接続機及び光ファイバ種判別方法 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SE506956C2 (sv) * | 1995-10-24 | 1998-03-09 | Ericsson Telefon Ab L M | Förfarande och anordning för att bestämma vinkelläget för en optisk axiell asymmetri, samt användning av förfarandet respektive anordningen |
| JP2002109050A (ja) * | 2000-09-28 | 2002-04-12 | Terumo Corp | 医薬品配送システム及びその方法 |
| JP4102707B2 (ja) * | 2003-05-19 | 2008-06-18 | 株式会社フジクラ | 定偏波光ファイバ自動判別方法及びその装置並びに定偏波光ファイバ接続方法及びその装置 |
| EP1508825A1 (en) | 2003-08-18 | 2005-02-23 | CCS Technology, Inc. | Method and device for determining the angular position of a polarization maintaining fiber |
| JP5303618B2 (ja) * | 2011-09-02 | 2013-10-02 | 株式会社フジクラ | 融着接続機及び光ファイバ判別方法 |
| CN102567745B (zh) * | 2011-12-29 | 2013-10-16 | 北京航天时代光电科技有限公司 | 一种光纤熔接质量的自动检测方法 |
| JP6350325B2 (ja) * | 2014-02-19 | 2018-07-04 | ヤマハ株式会社 | 音声解析装置およびプログラム |
| JP6362521B2 (ja) * | 2014-11-26 | 2018-07-25 | 株式会社日立システムズ | 行動分類システム、行動分類装置及び行動分類方法 |
| CN104515672B (zh) * | 2014-12-31 | 2018-11-23 | 中国电子科技集团公司第四十一研究所 | 一种光纤种类识别方法 |
| JP6219865B2 (ja) * | 2015-02-19 | 2017-10-25 | ファナック株式会社 | 制御装置の故障予測システム |
| JP6915265B2 (ja) * | 2016-12-19 | 2021-08-04 | 大日本印刷株式会社 | 化粧シート及び化粧ボード |
| JP6926472B2 (ja) * | 2016-12-27 | 2021-08-25 | 株式会社ジェイテクト | 解析装置および解析システム |
| JP6680809B2 (ja) * | 2018-01-09 | 2020-04-15 | ファナック株式会社 | ファイバレーザ装置及び機械学習装置 |
| JP6943820B2 (ja) | 2018-08-02 | 2021-10-06 | 古河電気工業株式会社 | 融着接続システム、融着接続機及び光ファイバの回転角判定方法 |
-
2020
- 2020-04-17 WO PCT/JP2020/016859 patent/WO2021210161A1/ja active Application Filing
-
2021
- 2021-04-12 US US17/995,501 patent/US20230185026A1/en active Pending
- 2021-04-12 EP EP21789509.3A patent/EP4137852A4/en active Pending
- 2021-04-12 JP JP2022515384A patent/JP7648039B2/ja active Active
- 2021-04-12 WO PCT/JP2021/015225 patent/WO2021210552A1/ja unknown
- 2021-04-12 CN CN202180027323.8A patent/CN115398293A/zh active Pending
- 2021-04-12 KR KR1020227039187A patent/KR20230006829A/ko active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002169050A (ja) | 2000-12-05 | 2002-06-14 | Sumitomo Electric Ind Ltd | 融着接続装置および融着接続方法 |
| JP2020020997A (ja) | 2018-08-02 | 2020-02-06 | 古河電気工業株式会社 | 融着接続システム、融着接続機及び光ファイバ種判別方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4137852A1 (en) | 2023-02-22 |
| WO2021210161A1 (ja) | 2021-10-21 |
| JP7648039B2 (ja) | 2025-03-18 |
| CN115398293A (zh) | 2022-11-25 |
| WO2021210552A1 (ja) | 2021-10-21 |
| US20230185026A1 (en) | 2023-06-15 |
| JPWO2021210552A1 (ko) | 2021-10-21 |
| EP4137852A4 (en) | 2023-09-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4367597B2 (ja) | 融着接続装置および融着接続方法 | |
| US10921520B2 (en) | Fusion splicing system, fusion splicer and method of determining rotation angle of optical fiber | |
| CN102567745A (zh) | 一种光纤熔接质量的自动检测方法 | |
| WO2007015917A2 (en) | Methods and apparatus for estimating optical insertion loss | |
| KR102517633B1 (ko) | 광섬유의 융착접속 분석 장치 및 그 분석 방법 | |
| KR20230006829A (ko) | 융착 접속기, 융착 접속 시스템, 및 광파이버를 융착 접속하는 방법 | |
| KR20230003501A (ko) | 광파이버를 위한 융착 접속 시스템, 융착 접속기, 모델 작성 장치, 및 광파이버를 융착 접속하는 방법 | |
| KR20210134626A (ko) | 광섬유의 융착 접속기, 및 광섬유의 융착 접속 방법 | |
| US6816244B2 (en) | Determining optical fiber types | |
| EP4105697A1 (en) | Optical fiber fusion splicer and method for fusion splicing optical fiber | |
| JP4032960B2 (ja) | 光ファイバ融着接続装置 | |
| KR101181895B1 (ko) | 다파장의 광원을 이용하는 광섬유 융착 접속 장치 및 융착 접속 방법 | |
| CN117666029A (zh) | 一种基于图像识别和电动控制的光纤拼接系统 | |
| CN116094586A (zh) | 一种光纤通信检测方法及装置、设备、介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20221109 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20240313 Comment text: Request for Examination of Application |
|
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20250701 Patent event code: PE09021S01D |