KR20220132616A - 센서 테스팅 스테이션 - Google Patents
센서 테스팅 스테이션 Download PDFInfo
- Publication number
- KR20220132616A KR20220132616A KR1020227029576A KR20227029576A KR20220132616A KR 20220132616 A KR20220132616 A KR 20220132616A KR 1020227029576 A KR1020227029576 A KR 1020227029576A KR 20227029576 A KR20227029576 A KR 20227029576A KR 20220132616 A KR20220132616 A KR 20220132616A
- Authority
- KR
- South Korea
- Prior art keywords
- container
- storage
- storage container
- testing station
- column
- Prior art date
Links
- 238000012360 testing method Methods 0.000 title claims abstract description 58
- 238000003860 storage Methods 0.000 claims abstract description 187
- 238000005259 measurement Methods 0.000 claims abstract description 62
- 238000000034 method Methods 0.000 claims abstract description 20
- 238000004891 communication Methods 0.000 claims abstract 2
- 241000894006 Bacteria Species 0.000 claims description 4
- 238000011179 visual inspection Methods 0.000 claims description 2
- 241000700605 Viruses Species 0.000 claims 1
- 230000032258 transport Effects 0.000 description 20
- 238000009826 distribution Methods 0.000 description 11
- 239000007789 gas Substances 0.000 description 11
- 235000013305 food Nutrition 0.000 description 9
- CURLTUGMZLYLDI-UHFFFAOYSA-N Carbon dioxide Chemical compound O=C=O CURLTUGMZLYLDI-UHFFFAOYSA-N 0.000 description 6
- 210000004027 cell Anatomy 0.000 description 6
- 238000012546 transfer Methods 0.000 description 6
- RWSOTUBLDIXVET-UHFFFAOYSA-N Dihydrogen sulfide Chemical compound S RWSOTUBLDIXVET-UHFFFAOYSA-N 0.000 description 3
- 229910002092 carbon dioxide Inorganic materials 0.000 description 3
- 239000001569 carbon dioxide Substances 0.000 description 3
- 238000006073 displacement reaction Methods 0.000 description 3
- 229910000037 hydrogen sulfide Inorganic materials 0.000 description 3
- 239000000523 sample Substances 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- VNWKTOKETHGBQD-UHFFFAOYSA-N methane Chemical compound C VNWKTOKETHGBQD-UHFFFAOYSA-N 0.000 description 2
- 210000000352 storage cell Anatomy 0.000 description 2
- 241000233866 Fungi Species 0.000 description 1
- 240000005561 Musa balbisiana Species 0.000 description 1
- 235000002245 Penicillium camembertii Nutrition 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 235000021015 bananas Nutrition 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000002845 discoloration Methods 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
Images










Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D21/00—Measuring or testing not otherwise provided for
- G01D21/02—Measuring two or more variables by means not covered by a single other subclass
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0464—Storage devices mechanical with access from above
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61L—METHODS OR APPARATUS FOR STERILISING MATERIALS OR OBJECTS IN GENERAL; DISINFECTION, STERILISATION OR DEODORISATION OF AIR; CHEMICAL ASPECTS OF BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES; MATERIALS FOR BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES
- A61L2/00—Methods or apparatus for disinfecting or sterilising materials or objects other than foodstuffs or contact lenses; Accessories therefor
- A61L2/02—Methods or apparatus for disinfecting or sterilising materials or objects other than foodstuffs or contact lenses; Accessories therefor using physical phenomena
- A61L2/08—Radiation
- A61L2/10—Ultraviolet radiation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61L—METHODS OR APPARATUS FOR STERILISING MATERIALS OR OBJECTS IN GENERAL; DISINFECTION, STERILISATION OR DEODORISATION OF AIR; CHEMICAL ASPECTS OF BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES; MATERIALS FOR BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES
- A61L2/00—Methods or apparatus for disinfecting or sterilising materials or objects other than foodstuffs or contact lenses; Accessories therefor
- A61L2/24—Apparatus using programmed or automatic operation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0478—Storage devices mechanical for matrix-arrangements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/06—Storage devices mechanical with means for presenting articles for removal at predetermined position or level
- B65G1/065—Storage devices mechanical with means for presenting articles for removal at predetermined position or level with self propelled cars
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/137—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed
- B65G1/1373—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed for fulfilling orders in warehouses
- B65G1/1378—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed for fulfilling orders in warehouses the orders being assembled on fixed commissioning areas remote from the storage areas
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61L—METHODS OR APPARATUS FOR STERILISING MATERIALS OR OBJECTS IN GENERAL; DISINFECTION, STERILISATION OR DEODORISATION OF AIR; CHEMICAL ASPECTS OF BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES; MATERIALS FOR BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES
- A61L2202/00—Aspects relating to methods or apparatus for disinfecting or sterilising materials or objects
- A61L2202/10—Apparatus features
- A61L2202/11—Apparatus for generating biocidal substances, e.g. vaporisers, UV lamps
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61L—METHODS OR APPARATUS FOR STERILISING MATERIALS OR OBJECTS IN GENERAL; DISINFECTION, STERILISATION OR DEODORISATION OF AIR; CHEMICAL ASPECTS OF BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES; MATERIALS FOR BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES
- A61L2202/00—Aspects relating to methods or apparatus for disinfecting or sterilising materials or objects
- A61L2202/10—Apparatus features
- A61L2202/14—Means for controlling sterilisation processes, data processing, presentation and storage means, e.g. sensors, controllers, programs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2201/00—Indexing codes relating to handling devices, e.g. conveyors, characterised by the type of product or load being conveyed or handled
- B65G2201/02—Articles
- B65G2201/0235—Containers
- B65G2201/0258—Trays, totes or bins
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2203/00—Indexing code relating to control or detection of the articles or the load carriers during conveying
- B65G2203/04—Detection means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2203/00—Indexing code relating to control or detection of the articles or the load carriers during conveying
- B65G2203/04—Detection means
- B65G2203/041—Camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2203/00—Indexing code relating to control or detection of the articles or the load carriers during conveying
- B65G2203/04—Detection means
- B65G2203/042—Sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2203/00—Indexing code relating to control or detection of the articles or the load carriers during conveying
- B65G2203/04—Detection means
- B65G2203/042—Sensors
- B65G2203/045—Thermic
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2207/00—Indexing codes relating to constructional details, configuration and additional features of a handling device, e.g. Conveyors
- B65G2207/30—Modular constructions
Landscapes
- Mechanical Engineering (AREA)
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Veterinary Medicine (AREA)
- Epidemiology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Physics & Mathematics (AREA)
- Public Health (AREA)
- Mathematical Physics (AREA)
- General Physics & Mathematics (AREA)
- Warehouses Or Storage Devices (AREA)
- Automatic Analysis And Handling Materials Therefor (AREA)
- Measuring Pulse, Heart Rate, Blood Pressure Or Blood Flow (AREA)
- Measurement Of Mechanical Vibrations Or Ultrasonic Waves (AREA)
- Measuring Fluid Pressure (AREA)
Abstract
물품을 저장하기 위한 저장 컨테이너(502) 내에서 측정을 수행하기 위한 시스템 및 방법으로서, 저장 컨테이너(502)는 저장 컨테이너(502)를 저장하기 위한 3-차원적인 저장 그리드 구조물(104)을 형성하는 프레임워크 구조물(100)을 포함하는 자동화된 저장 시스템 내에 저장되고, 그리드 구조물(104)은 수직 저장 컬럼(105)을 형성하고, 각각의 수직 저장 컬럼은 수직 저장 컬럼(105)의 접근 개구부(112)의 크기에 의해서 형성되는 동일한 수평 면적을 갖고, 레일 시스템(108)이, 각각의 저장 컬럼(105)의 상단부에서 각각의 접근 개구부(112)의 원주를 형성하는 프레임워크 구조물(100) 상에 배열되고, 레일 시스템(108)은 저장 컨테이너(502)를 핸들링하고 저장 컬럼(105)으로 그리고 그로부터 전달하는 컨테이너 핸들링 운반체(201)를 위한 이용 가능 루트를 제공하며, 각각의 운반체(201)는 저장 시스템의 동작을 제어하는 중앙 컴퓨터 시스템과 통신하는 운반체 제어기(230)를 포함하고, 상기 시스템은, 대기 조건을 측정하기 위한 그리고 상기 저장 컨테이너(502) 내에서 측정을 수행하기 위한 측정 장비를 갖춘, 레일 시스템(108)을 통해서 컨테이너 핸들링 운반체에 접근할 수 있는, 테스팅 스테이션(504)을 더 포함하고, 테스팅 스테이션(504)은 측정 데이터를 컴퓨터 시스템에 통신하도록 구성된다.
Description
본 발명은 컨테이너를 저장 및 회수하기 위한 자동화된 저장 및 회수 시스템, 특히 측정 장비를 포함하는 테스팅 스테이션 내에 배치될 때 컨테이너 내에서 측정을 수행하기 위한 시스템 및 방법에 관한 것이다.
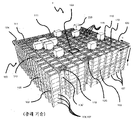
도 1은 프레임워크 구조물(100)을 갖는 전형적인 종래 기술의 자동화된 저장 및 회수 시스템(1)을 개시하고, 도 2 및 도 3은 그러한 시스템(1)에서의 동작에 적합한 2개의 상이한 종래 기술의 컨테이너 핸들링 운반체(201, 301)를 개시한다.
프레임워크 구조물(100)은 직립 부재(102), 수평 부재(103), 및 직립 부재(102)와 수평 부재(103) 사이에서 행(row)으로 배열되는 저장 컬럼(105)을 포함하는 저장 부피를 포함한다. 이러한 저장 컬럼(105) 내에서, 빈(bin)으로도 알려져 있는 저장 컨테이너(106)가 서로 상하로 적층되어 적층체(107)를 형성한다. 부재(102, 103)는 전형적으로 금속, 예를 들어 압축 알루미늄 프로파일로 제조될 수 있다.
자동화된 저장 및 회수 시스템(1)의 프레임워크 구조물(100)은 프레임워크 구조물(100)의 상단부에 걸쳐 배열된 레일 시스템(108)을 포함하고, 레일 시스템(108) 상에서 복수의 컨테이너 핸들링 운반체(201, 301)가 동작되어 저장 컨테이너(106)를 저장 컬럼(105)으로부터 상승시키고, 저장 컨테이너(106)를 저장 컬럼 내로 하강시키며, 또한 저장 컨테이너(106)를 저장 컬럼(105) 위에서 운송한다. 레일 시스템(108)은 프레임 구조물(100)의 상단부에 걸친 제1 방향(X)으로 컨테이너 핸들링 운반체(201, 301)의 이동을 안내하도록 배열된 평행 레일의 제1 세트(110), 및 제1 방향(X)에 수직인 제2 방향(Y)으로 컨테이너 핸들링 운반체(201, 301)의 이동을 안내하기 위한, 레일의 제1 세트(110)에 수직으로 배열된, 평행 레일의 제2 세트(111)를 포함한다. 컨테이너 핸들링 운반체는 레일 시스템(108) 내의 접근 개구부(112)를 통해서 컬럼(105) 내에 저장된 컨테이너(106)에 접근한다. 컨테이너 핸들링 운반체(201, 301)는 저장 컬럼(105) 위에서 측방향으로, 즉 수평 X-Y 평면에 평행한 평면 내에서 이동할 수 있다.
프레임워크 구조물(100)의 직립 부재(102)는, 컨테이너를 컬럼(105)으로부터 상승시키고 컨테이너를 컬럼 내로 하강시키는 동안 저장 컨테이너를 안내하기 위해서 사용된다. 컨테이너(106)의 적층체(107)는 전형적으로 자가-지지형이다.
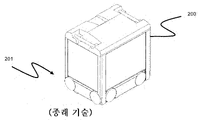
각각의 종래 기술의 컨테이너 핸들링 운반체(201, 301)는 운반체 본체(201a, 301a), 및 X 방향 및 Y 방향 각각을 따른 컨테이너 핸들링 운반체(201, 301)의 측방향 이동을 가능하게 하는 휠의 제1 및 제2 세트(201b, 301b, 201c, 301c)를 포함한다. 도 2 및 도 3에서, 각각의 세트 내의 2개의 휠을 완전히 확인할 수 있다. 휠의 제1 세트(201b, 301b)는 레일의 제1 세트(110) 중의 2개의 인접 레일들과 결합되도록 배열되고, 휠의 제2 세트(201c, 301c)는 레일의 제2 세트(111) 중의 2개의 인접 레일들과 결합되도록 배열된다. 휠의 세트(201b, 301b, 201c, 301c) 중 적어도 하나가 상승 및 하강될 수 있고, 그에 따라 휠의 제1 세트(201b, 301b) 및/또는 휠의 제2 세트(201c, 301c)가 언제든지 레일의 각각의 세트(110, 111)와 결합될 수 있다.
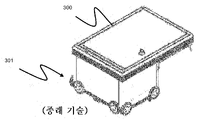
각각의 종래 기술의 컨테이너 핸들링 운반체(201, 301)는 또한 저장 컨테이너(106)의 수직 운송을 위한, 예를 들어 저장 컨테이너(106)를 저장 컬럼(105)으로부터 상승시키고 저장 컨테이너(106)를 저장 컬럼 내로 하강시키기 위한 승강 장치(미도시)를 포함한다. 승강 장치는 하나 이상의 파지/결합 장치를 포함하고, 그러한 파지/결합 장치는 저장 컨테이너(106)와 결합되도록 구성되고, 그러한 파지/결합 장치는 운반체(201, 301)로부터 하강될 수 있고, 그에 따라 운반체(201, 301)에 대한 파지/결합 장치의 위치가, 제1 방향(X) 및 제2 방향(Y)에 수직인, 제3 방향(Z)으로 조정될 수 있다. 컨테이너 핸들링 운반체(301)의 파지 장치의 일부가 도 3에 도시되어 있고 참조 번호 304로 표시되어 도시되어 있다. 컨테이너 핸들링 장치(201)의 파지 장치는 도 2에서 운반체 본체(301a) 내에 위치된다.
통상적으로 그리고 또한 본원의 목적을 위해서, Z=1은 저장 컨테이너의 최상부 층, 즉 레일 시스템(108) 바로 아래의 층을 나타내고, Z=2는 레일 시스템(108) 아래의 2번째 층, 그리고 Z=3은 3번째 층 등을 나타낸다. 도 1에 개시된 예시적인 종래 기술에서, Z=8은 저장 컨테이너의 최하부의 하단 층을 나타낸다. 유사하게, X=1…n 및 Y=1…n은 수평 평면 내의 각각의 저장 컬럼(105)의 위치를 나타낸다. 결과적으로, 예로서, 그리고 도 1에 표시된 데카르트 좌표계(X, Y, Z)를 이용하면, 도 1에서 106'으로 표시된 저장 컨테이너는 X=10, Y=2, Z=3의 저장 위치를 점유한다고 할 수 있다. 컨테이너 핸들링 운반체(201, 301)가 층(Z=0) 내에서 이동된다고 할 수 있고, 각각의 저장 컬럼(105)은 그 X 및 Y 좌표에 의해서 표시될 수 있다.
프레임워크 구조물(100)의 저장 부피는 종종 그리드(104)로 지칭되고, 이러한 그리드 내의 가능한 저장 위치는 저장 셀로 지칭된다. 각각의 저장 컬럼은 X- 및 Y-방향을 따른 위치에 의해서 표시될 수 있는 한편, 각각의 저장 셀은 X-, Y- 및 Z-방향을 따른 컨테이너 번호에 의해서 표시될 수 있다.
각각의 종래 기술의 컨테이너 핸들링 운반체(201, 301)는, 저장 컨테이너(106)를 레일 시스템(108)을 가로질러 운송할 때 저장 컨테이너(106)를 수용 및 수납하기 위한 저장 격실 또는 공간을 포함한다. 저장 공간은, 도 2에 도시된 바와 같은 그리고 예를 들어 기재 내용이 본원에서 참조로 포함되는 WO2015/193278A1에서 설명된 바와 같은, 운반체 본체(201a) 내의 중앙에 배열된 공동을 포함할 수 있다.
도 3은 외팔보 구성을 갖는 컨테이너 핸들링 운반체(301)의 대안적인 구성을 도시한다. 그러한 운반체는, 기재 내용이 또한 본원에서 참조로 포함되는 예를 들어 NO317366에 구체적으로 설명되어 있다.
도 2에 도시된 중앙 공동 컨테이너 핸들링 운반체(201)는, 예를 들어 기재 내용이 본원에서 참조로 포함되는 WO2015/193278A1에서 설명된 바와 같이, 저장 컬럼(105)의 측방향 범위와 일반적으로 동일한 X 및 Y 방향을 따른 치수를 가지는 면적을 커버하는 풋프린트(footprint)를 가질 수 있다. 본원에서 사용된 '측방향'이라는 용어는 '수평'을 의미할 수 있다.
대안적으로, 중앙 공동 컨테이너 핸들링 운반체(101)는, 예를 들어 WO2014/090684A1에 개시된 바와 같이, 저장 컬럼(105)에 의해서 형성된 측방향 면적보다 큰 풋프린트를 가질 수 있다.
레일 시스템(108)은 전형적으로, 운반체의 휠이 내부로 삽입되는 홈을 갖는 레일을 포함한다. 대안적으로, 레일은 상향 돌출 요소를 포함할 수 있고, 운반체의 휠은 레일 이탈을 방지하기 위한 플랜지를 포함한다. 이러한 홈 및 상향 돌출 요소는 집합적으로 트랙으로서 알려져 있다. 각각의 레일은 하나의 트랙을 포함할 수 있거나, 각각의 레일은 2개의 평행한 트랙들을 포함할 수 있다.
기재 내용이 본원에서 참조로 포함되는 WO2018146304는, X 및 Y 방향 모두를 따라서 평행한 트랙 및 레일을 포함하는 레일 시스템(108)의 전형적인 구성을 도시한다.
프레임워크 구조물(100) 내에서, 컬럼(105)의 대부분은 저장 컬럼(105)이고, 즉 저장 컨테이너(106)가 적층체(107)로 저장되는 컬럼(105)이다. 그러나, 일부 컬럼(105)이 다른 목적을 가질 수 있다. 도 1에서, 컬럼(119 및 120)은, 프레임워크 구조물(100)의 외부로부터 저장 컨테이너(106)에 접근할 수 있는 또는 저장 컨테이너가 프레임워크 구조물(100)의 내외로 전달될 수 있는 접근 스테이션(미도시)으로 운송될 수 있도록, 저장 컨테이너(106)를 드롭 오프(drop off) 및/또는 픽업(pick up)하기 위해서 컨테이너 핸들링 운반체(201, 301)에 의해서 이용되는 그러한 특별한-목적의 컬럼이다. 당업계에서, 그러한 위치는 일반적으로 '포트'로 지칭되고, 포트가 내부에 위치되는 컬럼은 '포트 컬럼'(119, 120)으로 지칭될 수 있다. 접근 스테이션으로의 운송은 임의의 방향일 수 있고, 즉 수평, 틸팅, 및/또는 수직일 수 있다. 예를 들어, 저장 컨테이너(106)는 프레임워크 구조물(100) 내에서 무작위적인 또는 지정된 컬럼(105) 내에 배치될 수 있고, 이어서 임의의 컨테이너 핸들링 운반체에 의해서 픽업될 수 있고, 접근 스테이션으로의 추가적인 운송을 위해서 포트 컬럼(119, 120)으로 운반될 수 있다. '틸팅된'이라는 용어는 수평과 수직 사이의 일반적인 운송 배향을 가지는 저장 컨테이너(106)의 운송을 의미한다는 것에 주목하여야 한다.
도 1에서, 제1 포트 컬럼(119)은 예를 들어, 컨테이너 핸들링 운반체(201, 301)가 접근 또는 전달 스테이션으로 운송하기 위한 저장 컨테이너(106)를 드롭 오프시킬 수 있는, 지정된 드롭-오프 포트 컬럼일 수 있고, 제2 포트 컬럼(120)은, 접근 또는 전달 스테이션으로부터 운송된 저장 컨테이너(106)를 컨테이너 핸들링 운반체(201, 301)가 픽업할 수 있는 지정된 픽업 포트 컬럼일 수 있다.
접근 스테이션은 전형적으로, 제품 아이템이 저장 컨테이너(106)로부터 제거되거나 그 내부에 배치되는 픽킹(picking) 또는 보관 스테이션일 수 있다. 픽킹 또는 보관 스테이션에서, 저장 컨테이너(106)는 일반적으로 자동화된 저장 및 회수 시스템(1)으로부터 제거되지 않고, 다시 접근되는 경우에 프레임워크 구조물(100) 내로 복귀된다. 포트가 또한 저장 컨테이너를 다른 저장 설비로(예를 들어, 다른 프레임워크 구조물로 또는 다른 자동화된 저장 및 회수 시스템으로), 운송 운반체(예를 들어, 기차 또는 대형 트럭)로, 또는 생산 설비로 전달하기 위해서 사용될 수 있다.
컨베이어를 포함하는 컨베이어 시스템을 일반적으로 이용하여, 저장 컨테이너를 포트 컬럼(119, 120)과 접근 스테이션 사이에서 운송한다.
포트 컬럼(119, 120) 및 접근 스테이션이 상이한 레벨들에 위치되는 경우에, 컨베이어 시스템은, 저장 컨테이너(106)를 포트 컬럼(119, 120)과 접근 스테이션 사이에서 수직으로 운송하기 위한 수직 구성요소를 갖춘 승강 장치를 포함할 수 있다.
컨베이어 시스템은, 예를 들어 기재 내용이 본원에서 참조로 포함되는 WO2014/075937A1에 설명된 바와 같이, 저장 컨테이너(106)를 상이한 프레임워크 구조물들 사이에서 전달하도록 배열될 수 있다.
도 1에 개시된 컬럼(105) 중 하나 내에 저장된 저장 컨테이너(106)에 접근할 때, 컨테이너 핸들링 운반체(201, 301) 중 하나는 목표 저장 컨테이너(106)를 그 위치로부터 회수하도록 그리고 이를 드롭-오프 포트 컬럼(119)으로 운송하도록 명령을 받는다. 이러한 동작은, 컨테이너 핸들링 운반체(201, 301)를, 목표 저장 컨테이너(106)가 내부에 배치되는 저장 컬럼(105) 위의 위치로 이동시키는 것, 컨테이너 핸들링 운반체(201, 301) 상승 장치(미도시)를 이용하여 저장 컨테이너(106)를 저장 컬럼(105)으로부터 회수하는 것, 그리고 저장 컨테이너(106)를 드롭-오프 포트 컬럼(119)으로 운송하는 것을 포함한다. 목표 저장 컨테이너(106)가 적층체(107) 내에 깊이 위치되는 경우에, 즉 목표 저장 컨테이너(106) 위에 하나의 또는 복수의 다른 저장 컨테이너(106)가 배치된 경우에, 동작은 또한, 목표 저장 컨테이너(106)를 저장 컬럼(105)으로부터 상승시키기 전에, 위에-배치된 저장 컨테이너를 일시적으로 이동시키는 것을 포함한다. 당업계에서 종종 "디깅(digging)"으로 지칭되는 이러한 단계는, 목표 저장 컨테이너를 드롭-오프 포트 컬럼(119)으로 운송하기 위해서 추후에 이용되는 동일한 컨테이너 핸들링 운반체를 이용하여, 하나 또는 복수의 다른 협력 컨테이너 핸들링 운반체를 이용하여 수행될 수 있다. 대안적으로 또는 부가적으로, 자동화된 저장 및 회수 시스템(1)은, 저장 컨테이너를 저장 컬럼(105)으로부터 일시적으로 제거하는 과제를 위해서 특별히 지정된 컨테이너 핸들링 운반체를 가질 수 있다. 목표 저장 컨테이너(106)가 저장 컬럼(105)으로부터 제거되면, 일시적으로 제거된 저장 컨테이너가 원래의 저장 컬럼(105) 내로 재배치될 수 있다. 그러나, 대안적으로, 제거된 저장 컨테이너가 다른 저장 컬럼으로 재배치될 수 있다.
저장 컨테이너(106)를 컬럼(105) 중 하나 내에 저장하고자 할 때, 컨테이너 핸들링 운반체(201, 301) 중 하나는, 저장 컨테이너(106)를 픽업 포트 컬럼(120)으로부터 픽업하도록 그리고 이를 저장하고자 하는 저장 컬럼(105) 위의 위치로 운송하도록 명령을 받는다. 저장 컬럼 적층체(107) 내의 목표 위치에 또는 그 위에 배치된 임의의 저장 컨테이너가 제거된 후에, 컨테이너 핸들링 운반체(201, 301)는 저장 컨테이너(106)를 희망 위치에 배치한다. 이어서, 제거된 저장 컨테이너는 저장 컬럼(105) 내로 다시 하강될 수 있거나, 다른 저장 컬럼으로 재배치될 수 있다.
자동화된 저장 및 회수 시스템(1)을 모니터링 및 제어하기 위해서, 예를 들어 프레임워크 구조물(100) 내의 각각의 저장 컨테이너(106)의 위치, 각각의 저장 컨테이너(106)의 내용물; 및 컨테이너 핸들링 운반체들(201, 301)이 서로 충돌하지 않고 희망 저장 컨테이너(106)가 희망 시간에 희망 위치로 전달될 수 있도록 하는 컨테이너 핸들링 운반체(201, 301)의 이동을 모니터링 및 제어하기 위해서, 자동화된 저장 및 회수 시스템(1)은 제어 시스템(500)을 포함하고, 그러한 제어 시스템은 전형적으로 컴퓨터화되고 전형적으로 저장 컨테이너(106)를 계속 추적하기 위한 데이터베이스를 포함한다.
도 4는 전달 운반체를 설명한다. 전달 운반체는 컨테이너 핸들링 운반체에서와 동일한 휠의 셋업을 갖는 기부를 포함한다. 휠 기부 유닛은 휠 배열체를 특징으로 하고, 이러한 휠 배열체는 레일 그리드(즉, 상단 레일 그리드 및 전달 레일 그리드 중 임의의 것) 상에서 제1 방향으로 이동하기 위한 휠의 제1 세트 및 제1 방향에 수직인 제2 방향으로 이동하기 위한 휠의 제2 세트를 갖는다. 각각의 휠의 세트는 휠 기부 유닛의 대향 측면들에 배열된 2개의 휠의 쌍을 포함한다. 휠 기부 유닛이 레일 그리드 상으로 이동할 수 있는 방향을 변경하기 위해서, 휠의 세트 중 하나가 휠 변위 조립체에 연결된다. 휠 변위 조립체는, 희망 방향으로 이동하는 휠의 세트만이 레일 그리드와 접촉되도록, 연결된 휠의 세트를 휠의 다른 세트에 대해서 상승 및 하강시킬 수 있다. 휠 변위 조립체는 전기 모터에 의해서 구동된다. 또한, 재충전 가능 배터리에 의해서 전력을 공급 받는 2개의 전기 모터가 휠의 세트에 연결되어, 휠 기부 유닛을 희망 방향으로 이동시킨다. 휠 기부 유닛의 수평 주변부는, 2개의 휠-기부 유닛들이 레일 그리드의 임의의 인접 그리드 셀 상에서 서로 통과할 수 있도록, 레일 그리드의 그리드 셀에 의해서 형성된 수평 면적 내에 피팅되는 치수를 갖는다. 다시 말해서, 휠 기부 유닛은, 예를 들어 기재 내용이 본원에서 참조로 포함되는 WO2015/193278A1에서 설명된 바와 같이, 그리드 셀의 수평 면적과 일반적으로 동일한, 풋프린트, 즉 X 및 Y 방향의 범위, 즉 X 및 Y 방향을 따른 그리드 셀의 범위를 가질 수 있다.
종래 기술의 해결책의 문제점은, 저장부 내에 부패 가능 물품이 있는 경우에, 제품의 신선도 및 물품이 저장되는 조건을 측정할 필요가 있다는 것이다. 그러나, 고가의 장비 및 광범위한 재구축을 필요로 하는 비용이 많이 드는 해결책으로 전환할 필요가 없이 물품을 정확하게 판독하는데 있어서 문제점이 있다. 그에 따라, 본 발명의 목적은 전술한 문제점을 해결하는 것이다.
본 발명은 독립 청구항에 기재되어 있고 특성화되는 한편, 종속 청구항은 본 발명의 다른 특성을 설명한다.
일 양태에서, 본 발명은 물품을 저장하기 위한 저장 컨테이너 내에서 측정을 수행하기 위한 시스템에 관한 것으로서, 저장 컨테이너는 저장 컨테이너를 저장하기 위한 3-차원적인 저장 그리드 구조물을 형성하는 프레임워크 구조물을 포함하는 자동화된 저장 시스템 내에 저장되고, 그리드 구조물은 수직 저장 컬럼을 형성하고, 각각의 수직 저장 컬럼은 수직 저장 컬럼의 접근 개구부의 크기에 의해서 형성되는 수평 면적을 갖고, 레일 시스템이, 각각의 저장 컬럼의 상단부에서 각각의 접근 개구부의 원주를 형성하는 프레임워크 구조물 상에 배열되고, 레일 시스템은 저장 컨테이너를 핸들링하고 저장 컬럼으로 그리고 그로부터 전달하는 컨테이너 핸들링 운반체를 위한 이용 가능 루트를 제공하며, 상기 시스템은 대기 조건을 측정하기 위한 그리고 상기 저장 컨테이너 내에서 측정을 수행하기 위한 측정 장비를 갖춘, 레일 시스템을 통해서 컨테이너 핸들링 운반체에 접근할 수 있는, 테스팅 스테이션을 더 포함하고, 테스팅 스테이션은 측정 데이터를 컴퓨터 시스템에 통신하도록 구성된다.
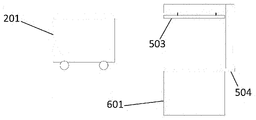
또한, 테스팅 스테이션은 측정 플랫폼이 부착되는 상부 부분, 컨테이너를 수용하는 하부 부분, 및 상부 부분과 하부 부분을 연결하는 부분을 포함할 수 있다. 또한, 테스팅 스테이션은 상부 부분과 하부 부분 사이에서 컨테이너를 수용하기 위한 공간을 가질 수 있고, 테스팅 스테이션은 측정 플랫폼을 상승 및 하강시키도록 구성될 수 있다.
테스팅 스테이션은 상단부에서 컨테이너를 갖는 컨테이너 핸들링 운반체를 수용하도록 구성될 수 있다.
측정 플랫폼은 전기 모터에 의해서 제어되는 로프, 밴드 또는 와이어에 의해서 상승 및 하강될 수 있거나, 측정 플랫폼은 로봇 아암에 의해서 상승 및 하강될 수 있고, 측정 플랫폼은 온도 측정 장비, 수분 검출기, 가스 검출기 및 카메라를 포함한다.
본 발명의 제3 양태는 자동화된 저장 시스템에서 저장하기 위한 컨테이너 내에서 측정을 수행하는 방법에 관한 것으로서, 자동화된 저장 시스템은 하부측 저장 시스템(1)의 3-차원적인 그리드(4), 컨테이너를 운송하기 위한 적어도 하나의 컨테이너 핸들링 운반체, 추가적인 분배를 위해서 물품을 픽킹하기 위한 포트, 저장 시스템의 동작을 제어하기 위한 중앙 컴퓨터 시스템을 포함하고, 상기 방법은:
컨테이너를 컨테이너 핸들링 운반체로 테스팅 스테이션 내에 배치하는 단계,
테스팅 스테이션에 부착된 측정 플랫폼을 컨테이너 상으로 하강시키는 단계,
측정을 수행하고, 측정을 중앙 컴퓨터 시스템에 전송하고, 측정을 기초로 분석을 수행하고, 분석을 기초로 컨테이너 핸들링 운반체에 명령어를 전송하고, 측정 플랫폼을 상승시키고, 컨테이너를 컨테이너 핸들링 운반체로 다른 목적지로 운송하는 단계를 포함한다. 컨테이너 내의 온도, 수분 및 가스 레벨의 측정 수행 및 물품의 시각적 검사를 위해서 카메라를 이용하는 것.
이하의 도면은 본 발명의 이해를 돕기 위해서 첨부된 것이다. 도면은, 단지 예로서 이제 설명할 본 발명의 실시형태를 도시한다.
도 1은 종래 기술의 자동화된 저장 및 회수 시스템의 프레임워크 구조물의 사시도이다.
도 2는 저장 컨테이너를 내부에서 운반하기 위한 중앙 배열 공동을 가지는 종래 기술의 컨테이너 핸들링 운반체의 사시도이다.
도 3은 저장 컨테이너를 아래에서 운반하기 위한 외팔보를 가지는 종래 기술의 컨테이너 핸들링 운반체의 사시도이다.
도 4는 전달 운반체의 측면도이다.
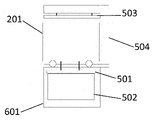
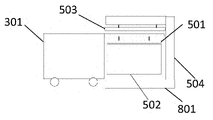
도 5a 내지 도 5d는 본 발명의 실시형태의 측면도로서, 여기에서 중앙 공동을 가지는 컨테이너 핸들링 운반체가 측정을 위해서 컨테이너를 테스팅 스테이션 내에 배치한다.
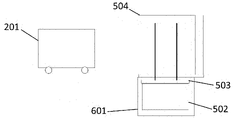
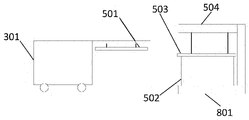
도 6a 내지 도 6d는 본 발명의 실시형태의 측면도로서, 여기에서 외팔보 해결책을 가지는 컨테이너 핸들링 운반체가 측정을 위해서 컨테이너를 테스팅 스테이션 내에 배치한다.
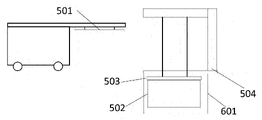
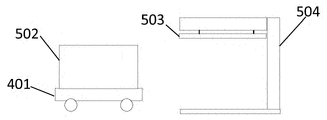
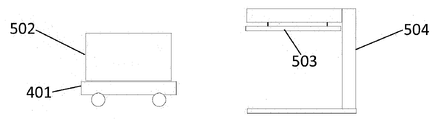
도 7a 내지 도 7c는 본 발명의 실시형태의 측면도로서, 여기에서 컨테이너를 운반하는 전달 운반체가 테스팅 스테이션 내에 배치된다.
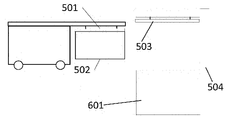
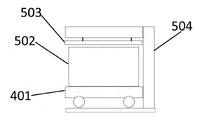
도 8a 내지 도 8d는 본 발명의 대안적인 실시형태의 측면도로서, 여기에서 외팔보 해결책을 가지는 컨테이너 핸들링 운반체가 측정을 위해서 컨테이너를 테스팅 스테이션 내에 배치한다.
도 9a 내지 도 9c는 본 발명의 대안적인 실시형태의 측면도로서, 여기에서 컨테이너를 운반하는 전달 운반체가 테스팅 스테이션 내에 배치된다.
도 10은 본 발명의 실시형태의 프로세스 내의 단계들을 설명하는 흐름도이다.
도 1은 종래 기술의 자동화된 저장 및 회수 시스템의 프레임워크 구조물의 사시도이다.
도 2는 저장 컨테이너를 내부에서 운반하기 위한 중앙 배열 공동을 가지는 종래 기술의 컨테이너 핸들링 운반체의 사시도이다.
도 3은 저장 컨테이너를 아래에서 운반하기 위한 외팔보를 가지는 종래 기술의 컨테이너 핸들링 운반체의 사시도이다.
도 4는 전달 운반체의 측면도이다.
도 5a 내지 도 5d는 본 발명의 실시형태의 측면도로서, 여기에서 중앙 공동을 가지는 컨테이너 핸들링 운반체가 측정을 위해서 컨테이너를 테스팅 스테이션 내에 배치한다.
도 6a 내지 도 6d는 본 발명의 실시형태의 측면도로서, 여기에서 외팔보 해결책을 가지는 컨테이너 핸들링 운반체가 측정을 위해서 컨테이너를 테스팅 스테이션 내에 배치한다.
도 7a 내지 도 7c는 본 발명의 실시형태의 측면도로서, 여기에서 컨테이너를 운반하는 전달 운반체가 테스팅 스테이션 내에 배치된다.
도 8a 내지 도 8d는 본 발명의 대안적인 실시형태의 측면도로서, 여기에서 외팔보 해결책을 가지는 컨테이너 핸들링 운반체가 측정을 위해서 컨테이너를 테스팅 스테이션 내에 배치한다.
도 9a 내지 도 9c는 본 발명의 대안적인 실시형태의 측면도로서, 여기에서 컨테이너를 운반하는 전달 운반체가 테스팅 스테이션 내에 배치된다.
도 10은 본 발명의 실시형태의 프로세스 내의 단계들을 설명하는 흐름도이다.
이하에서, 첨부 도면을 참조하여 본 발명의 실시형태를 더 구체적으로 설명할 것이다. 그러나, 도면은 본 발명을 도면에 도시된 청구-대상으로 제한하기 위한 것이 아님을 이해하여야 할 것이다.
자동화된 저장 및 회수 시스템(1)의 프레임워크 구조물(100)은 도 1 내지 도 3과 관련하여 전술한 종래 기술의 프레임워크 구조물(100)에 따라 구성되고, 즉 많은 수의 직립 부재(102) 및 직립 부재(102)에 의해서 지지되는 많은 수의 수평 부재(103)로 구성되고, 또한 프레임워크 구조물(100)은 X 방향 및 Y 방향의 제1 상부 레일 시스템(108)을 포함한다.
프레임워크 구조물(100)은 부재들(102, 103) 사이에 제공된 저장 컬럼(105) 형태의 저장 격실을 더 포함하고, 저장 컨테이너(106)는 저장 컬럼(105) 내에서 적층체(107)로 적층될 수 있다.
프레임워크 구조물(100)은 임의의 크기일 수 있다. 특히, 프레임워크 구조물은 도 1에 개시된 것보다 상당히 더 넓을 수 있고/있거나 더 길 수 있고/있거나 더 깊을 수 있다. 예를 들어, 프레임워크 구조물(100)은 700 x 700 컬럼 초과의 수평 범위 및 12개 초과의 컨테이너의 저장 깊이를 가질 수 있다.
이제, 도 5a 내지 도 5d, 도 6a 내지 도 6d, 도 7a 내지 도 7c, 도 8a 내지 도 8d, 도 9a 내지 도 9c 및 도 10을 참조하여, 본 발명에 따른 자동화된 저장 및 회수 시스템의 실시형태를 더 구체적으로 설명할 것이다.
본 발명의 바람직한 실시형태에서, 테스팅 스테이션은 상단 부분을 포함한다. 이러한 상단 부분은 측정 플랫폼을 수용한다. 측정 플랫폼은 적어도 하나의 센서를 포함한다. 적어도 하나의 센서는 저장 컨테이너 내의 적어도 하나의 대기 조건을 측정하기 위해서 사용된다. 하나의 그러한 대기 조건은 컨테이너 내의 온도일 수 있고, 또한 센서는 식품이 썩는 동안 방출되는 가스의 존재를 검출하기 위해서 사용될 수 있다. 하나의 그러한 가스는 메탄일 수 있다. 식품의 부패 중에 방출되는 다른 가스는 이산화탄소 및 황화수소이다. 이산화탄소 및 황화수소의 경우에, 이들은 공기보다 무겁고 그에 따라 컨테이너의 하단부에 모일 것이다. 이산화탄소 및 황화수소를 감지하기 위한 센서는 그에 따라, 컨테이너 내로 하강되는 탐침에 부착될 수 있다. 대안적으로, 컨테이너의 측면 및 하단부 내에 홀이 있을 수 있고, 이러한 홀 내로 센서를 삽입할 수 있다. 또 다른 해결책에서, 예를 들어 컨테이너의 내측 연부를 따라서 슬릿 또는 터널이 있을 수 있고, 컨테이너의 내용물이 탐침을 방해하지 않게, 탐침이 컨테이너의 하단부 내로 하강될 수 있다. 또한, 수분을 검출하기 위한 검출기가 있을 수 있다. 수분의 존재는, 식품이 썩는 동안 식품의 세포가 파괴되고 세포 내의 액체가 누출된다는 사실에 기인한다. 추가적인 유형의 측정 장비가 카메라일 수 있다. 카메라는, 식품이 썩는다는 것에 관한 임의의 징후가 있는지를 검출하기 위해서, 컨테이너 내부의, 즉 내용물의 사진을 촬영할 수 있다. 카메라는, 예를 들어 바나나의 갈색 반점이나 흰곰팡이로 인한 표면 변색과 같이 음식에 표시가 있는지를 검출하기 위해서 컬러 화상을 촬영하는 일반 카메라일 수 있다. 대안적으로 또는 부가적으로, 곰팡이를 검출하기 위해서 자외선 광을 가지는 카메라를 이용할 수 있다.
또한, 식품 상의 박테리아를 사멸시키기 위해서 UV 광을 사용할 수 있다. 또한, 곰팡이를 사멸시키기 위해서 UV 광을 이용할 수 있다. 그에 따라, 측정 플랫폼은, 썩고 있는 식품을 검출하기 위해서 그리고 식품 상의 그리고 컨테이너 내의 박테리아 및 곰팡이를 사멸시키기 위해서 사용될 수 있는 UV 광원을 가질 수 있다. 부패를 검출하기 위해서 그리고 박테리아 및 곰팡이를 사멸하기 위해서 UV 광원을 사용하는 것들 사이의 차이는, 광의 파장 및 광원의 파워이다.
도 5a 내지 도 5d는 본 발명의 실시형태의 측면도로서, 여기에서 중앙 공동을 가지는 컨테이너 핸들링 운반체가 측정을 위해서 컨테이너를 테스팅 스테이션 내에 배치한다. 중앙 공동 내에서 컨테이너를 갖는 컨테이너 핸들링 운반체가 테스팅 스테이션 내로 이동한다. 컨테이너는 컨테이너 핸들링 운반체 아래의 공동 내로 하강된다. 컨테이너 핸들링 운반체가 테스팅 스테이션 내에 컨테이너를 배치한 후에, 컨테이너 핸들링 운반체는 멀리 이동한다. 컨테이너 핸들링 운반체가 멀리 이동한 후에, 측정 장비가 측정 플랫폼 상으로 하강된다. 테스팅 스테이션은 측정 플랫폼을 컨테이너 상으로 하강시킨다. 측정 플랫폼은 전기 모터에 부착된 라인을 이용하여 하강된다. 이러한 라인은 와이어, 벨트, 체인, 로프 또는 유사물일 수 있다. 측정 플랫폼은 상단 개구부 위에 피팅된다. 플랫폼은 하부측에 부착된 측정 장비를 더 포함한다. 측정 장비는, 플랫폼이 컨테이너 상에 배치될 때 컨테이너 내부에 피팅되도록, 배치된다. 측정 장비는 온도 센서, 수분 센서, 가스 센서, 및/또는 카메라일 수 있다. 측정 플랫폼에 장착될 수 있는 임의의 다른 종류의 측정 장비가 사용될 수 있다. 측정 장비가 데이터를 수집한 후에, 이는 중앙 컴퓨터 시스템에 송신될 수 있다. 중앙 컴퓨터 시스템은, 컨테이너의 내용물의 상태를 계속 추적하기 위해서 컨테이너의 ID와 함께 데이터를 저장할 수 있다. 컨테이너의 내용물의 상태를 기초로, 중앙 컴퓨터 시스템은 명령어를 컨테이너 핸들링 운반체에 송신하여, 컨테이너를 컨테이너 내의 물품의 상태에 따른 목적지로 운송할 수 있다. 물품이 고객에게 분배할 수 있는 상태에 있는 경우에, 물품을 갖는 컨테이너가, 희망 물품이 추가적인 분배를 위해서 픽킹될 수 있는 스테이션으로 운송되거나, 물품을 갖는 컨테이너가 저장 시스템 내로 다시 운송될 수 있다. 컨테이너 내의 하나 이상의 물품의 품질이 좋지 못한 경우에, 컨테이너는, 오염 물품을 컨테이너로부터 제거할 수 있는 목적지로 운송될 수 있다. 물품이 제거된 후에, 컨테이너는 저장 시스템으로 다시 운반되거나, 고객에게 추가적으로 분배하기 위해서 물품이 픽킹되는 픽킹 스테이션으로의 추가적인 분배를 위한 포트로 운송된다.
도 6a 내지 도 6d는 본 발명의 실시형태의 측면도로서, 여기에서 외팔보 해결책을 가지는 컨테이너 핸들링 운반체가 측정을 위해서 컨테이너를 테스팅 스테이션 내에 배치한다. 컨테이너 핸들링 운반체는 저장 시스템으로부터 컨테이너를 운반하는 테스팅 스테이션에 접근한다. 컨테이너 핸들링 운반체는 컨테이너를 테스팅 스테이션 내에 배치한다. 컨테이너 핸들링 운반체가 후퇴되어, 테스팅 스테이션이 상단 개구부를 통해서 컨테이너의 내용물에 접근할 수 있게 한다. 테스팅 스테이션은 측정 플랫폼을 컨테이너 상으로 하강시킨다. 측정 플랫폼은 전기 모터에 부착된 라인을 이용하여 하강된다. 이러한 라인은 와이어, 벨트, 체인, 로프 또는 유사물일 수 있다. 측정 플랫폼은 상단 개구부 위에 피팅된다. 플랫폼은 하부측에 부착된 측정 장비를 포함한다. 측정 장비는, 예를 들어, 플랫폼이 컨테이너 상에 배치될 때 컨테이너 내부에 피팅되도록, 하부측에 배치된다. 측정 장비는 온도 센서, 수분 센서, 가스 센서, 및/또는 카메라일 수 있다. 측정 플랫폼에 장착될 수 있는 임의의 다른 종류의 측정 장비가 사용될 수 있다. 수집된 데이터는 중앙 컴퓨터 시스템에 송신될 수 있다. 중앙 컴퓨터 시스템은 데이터를 저장 및 분석할 수 있다. 컨테이너의 내용물의 상태를 계속 추적하기 위해서, 데이터가 컨테이너의 ID와 함께 저장될 수 있다. 컨테이너의 내용물의 상태를 기초로, 중앙 컴퓨터 시스템은 명령어를 컨테이너 핸들링 운반체에 송신하여, 컨테이너를 컨테이너 내의 물품의 상태에 따른 목적지로 운송할 수 있다. 물품이 고객에게 분배할 수 있는 상태에 있는 경우에, 물품을 갖는 컨테이너가, 희망 물품이 추가적인 분배를 위해서 픽킹될 수 있는 스테이션으로 운송되거나, 물품을 갖는 컨테이너가 저장 시스템 내로 역으로 운송될 수 있다. 컨테이너 내의 하나 이상의 물품의 품질이 좋지 못한 경우에, 컨테이너는, 오염 물품을 컨테이너로부터 제거할 수 있는 목적지로 운송될 수 있다. 물품이 제거된 후에, 컨테이너는 저장 시스템으로 다시 운반되거나, 고객에게 추가적으로 분배하기 위해서 물품이 픽킹되는 픽킹 스테이션으로의 추가적인 분배를 위한 포트로 운송된다.
도 7a 내지 도 7d는 본 발명의 실시형태의 측면도로서, 여기에서 컨테이너를 운반하는 전달 운반체가 테스팅 스테이션 내에 배치된다. 전달 운반체가, 전술한 핸들링 운반체와 같은, 컨테이너 위에 배열된 승강 플랫폼을 가지지 않기 때문에, 전달 운반체는 도움이 없이 컨테이너를 테스팅 스테이션 내에 배치할 수 없다. 본 발명의 실시형태에서, 상단부에서 컨테이너를 갖는 전달 운반체는 테스팅 스테이션 내로 피팅된다. 이러한 실시형태에서, 그에 따라, 상단부에서 컨테이너를 갖는 전달 운반체 자체가 테스팅 스테이션으로 이동할 수 있도록, 테스팅 스테이션은 하단부에서 트랙을 갖는다. 테스팅 스테이션은 측정 플랫폼을 컨테이너 상으로 하강시킨다. 측정 플랫폼은 전기 모터에 부착된 와이어, 벨트, 체인, 로프 또는 유사물을 이용하여 하강된다. 측정 플랫폼은 상단 개구부 위에 피팅된다. 플랫폼은 하부측에 부착된 측정 장비를 더 포함한다. 측정 장비는, 플랫폼이 컨테이너 상에 배치될 때 컨테이너 내부에 피팅되도록, 배치된다. 측정 장비는 온도 센서, 수분 센서, 가스 센서, 및/또는 카메라일 수 있다. 측정 플랫폼에 장착될 수 있는 임의의 다른 종류의 측정 장비가 사용될 수 있다. 측정 장비로부터 데이터가 수집된 후에, 데이터는 중앙 컴퓨터 시스템에 송신될 수 있다. 데이터가 수집되었을 때, 상단부에서 컨테이너를 가지는 전달 운반체가 다음 목적지로 운송될 수 있다.
도 8a 내지 도 8d는 본 발명의 대안적인 실시형태의 측면도로서, 여기에서 외팔보 해결책을 가지는 컨테이너 핸들링 운반체가 측정을 위해서 컨테이너를 테스팅 스테이션 내에 배치한다. 컨테이너 핸들링 운반체는 저장 시스템으로부터 컨테이너를 운반하는 테스팅 스테이션에 접근한다. 컨테이너 핸들링 운반체는 컨테이너를 테스팅 스테이션의 기부 상에 배치한다. 컨테이너 핸들링 운반체가 후퇴되어, 테스팅 스테이션이 상단 개구부를 통해서 컨테이너의 내용물에 접근할 수 있게 한다. 테스팅 스테이션은 측정 플랫폼을 컨테이너 상으로 하강시킨다. 측정 플랫폼은 전기 모터에 부착된 와이어, 벨트, 체인, 로프 또는 유사물을 이용하여 하강된다. 측정 플랫폼은 상단 개구부 위에 피팅된다. 플랫폼은 하부측에 부착된 측정 장비를 더 포함한다. 측정 장비는, 플랫폼이 컨테이너 상에 배치될 때 컨테이너 내부에 피팅되도록, 배치된다. 측정 장비는 온도 센서, 수분 센서, 가스 센서, 및/또는 카메라일 수 있다. 측정 플랫폼에 장착될 수 있는 임의의 다른 종류의 측정 장비가 사용될 수 있다. 수집된 데이터는 중앙 컴퓨터 시스템에 송신될 수 있다. 중앙 컴퓨터 시스템은 데이터를 저장 및 분석할 수 있다. 컨테이너의 내용물의 상태를 계속 추적하기 위해서, 데이터가 컨테이너의 ID와 함께 저장될 수 있다. 컨테이너의 내용물의 상태를 기초로, 중앙 컴퓨터 시스템은 명령어를 컨테이너 핸들링 운반체에 송신하여, 컨테이너를 컨테이너 내의 물품의 상태에 따른 목적지로 운송할 수 있다. 물품이 고객에게 분배할 수 있는 상태에 있는 경우에, 물품을 갖는 컨테이너가, 희망 물품이 추가적인 분배를 위해서 픽킹될 수 있는 스테이션으로 운송되거나, 물품을 갖는 컨테이너가 저장 시스템 내로 역으로 운송될 수 있다. 컨테이너 내의 하나 이상의 물품의 품질이 좋지 못한 경우에, 컨테이너는, 오염 물품을 컨테이너로부터 제거할 수 있는 목적지로 운송될 수 있다. 물품이 제거된 후에, 컨테이너는 저장 시스템으로 다시 운반되거나, 고객에게 추가적으로 분배하기 위해서 물품이 픽킹되는 픽킹 스테이션으로의 추가적인 분배를 위한 포트로 운송된다.
도 9a 내지 도 9c는 본 발명의 대안적인 실시형태의 측면도로서, 여기에서 컨테이너를 운반하는 전달 운반체가 테스팅 스테이션 내에 배치된다. 전달 운반체가 컨테이너를 유지하는 승강 플랫폼을 가지지 않기 때문에, 전달 운반체는 도움이 없이 컨테이너를 테스팅 스테이션 내에 배치할 수 없다. 본 발명의 실시형태에서, 상단부에서 컨테이너를 갖는 전달 운반체는 테스팅 스테이션 내로 피팅된다. 이러한 실시형태에서, 상단부에서 컨테이너를 갖는 전달 운반체 자체가 테스팅 스테이션으로 이동할 수 있도록, 테스팅 스테이션은 테스팅 스테이션의 기부에서 트랙을 갖는다. 테스팅 스테이션은 측정 플랫폼을 컨테이너 상으로 하강시킨다. 측정 플랫폼은 전기 모터에 부착된 와이어, 벨트, 체인, 로프 또는 유사물을 이용하여 하강된다. 측정 플랫폼은 상단 개구부 위에 피팅된다. 플랫폼은 하부측에 부착된 측정 장비를 더 포함한다. 측정 장비는, 플랫폼이 컨테이너 상에 배치될 때 컨테이너 내부에 피팅되도록, 배치된다. 측정 장비는 온도 센서, 수분 센서, 가스 센서, 및/또는 카메라일 수 있다. 측정 플랫폼에 장착될 수 있는 임의의 다른 종류의 측정 장비가 사용될 수 있다. 측정 장비로부터 데이터가 수집된 후에, 데이터는 중앙 컴퓨터 시스템에 송신될 수 있다. 데이터가 수집되었을 때, 상단부에서 컨테이너를 가지는 전달 운반체가 다음 목적지로 운송될 수 있다.
도 10은 본 발명의 실시형태의 프로세스 내의 단계들을 설명하는 흐름도이다. 컨테이너 핸들링 운반체 또는 전달 운반체가 컨테이너를 저장 시스템으로부터 운송한다. 저장 시스템은 프레임워크 구조물(100)을 갖는 자동화된 저장 및 회수 시스템(1)이고, 직립 부재(102), 수평 부재(103), 및 직립 부재(103)와 수평 부재(102) 사이에서 행으로 배열되는 저장 컬럼(105)을 포함하는 저장 부피를 포함한다. 이러한 저장 컬럼(105) 내에서, 빈으로도 알려져 있는 저장 컨테이너(106)가 서로 상하로 적층되어 적층체(107)를 형성한다. 컨테이너 핸들링 운반체 또는 전달 운반체가 컨테이너를 측정 스테이션으로 운송한다. 컨테이너를 운송하는 운반체에 따라, 컨테이너가 테스팅 스테이션 내에 배치되거나, 상단부에서 컨테이너를 갖는 전달 운반체가 테스팅 스테이션 내에 주차된다. 테스팅 스테이션은 측정 플랫폼을 낮추고, 측정 플랫폼은 컨테이너의 상단부 위에 피팅된다. 측정 플랫폼은 부착 센서를 갖는다. 센서는 온도 센서, 가스 센서, 수분 검출기, 및/또는 카메라일 수 있다. 센서로부터의 데이터가 수집되고 중앙 컴퓨터 시스템으로 송신된다. 중앙 컴퓨터 시스템에서, 수집된 데이터가 컨테이너의 ID와 함께 저장된다. 또한, 데이터가 분석될 수 있고, 분석 결과는 컨테이너 및 그 내용물이 측정 후에 가야 할 곳을 결정하는 기초가 된다. 측정이 수행된 후에, 중앙 컴퓨터 시스템은 명령어를 컨테이너 핸들링 운반체 또는 전달 운반체에 송신하여, 컨테이너를 미리 결정된 목적지로 운송하게 한다. 미리 결정된 목적지는 컨테이너 내의 물품의 품질에 따라 달라진다. 물품이 고객에게 분배할 수 있을 정도로 충분히 양호한 품질을 가지는 경우에, 컨테이너는 포트로 운송되고, 컨테이너는 그러한 포트로부터 추가적인 분배를 위해서 물품이 수집되는 픽킹 스테이션으로 운송되며, 대안적으로, 컨테이너는 저장 그리드 구조물로 다시 운송될 수 있다. 컨테이너 내의 물품이 인간의 소비를 위한 충분한 품질을 가지지 못하는 경우에, 이는, 오염 물품이 컨테이너로부터 픽킹되고 미리 규정된 지시에 따라 폐기되는 목적지로 운송된다.
선행 설명에서, 본 발명에 따른 전달 운반체 및 자동화된 저장 및 회수 시스템의 여러 양태가 예시적인 실시형태를 참조하여 설명되었다. 설명을 위해서, 특정 숫자, 시스템 및 구성이 시스템 및 그 작업의 완전한 이해를 제공하기 위해서 기술되었다. 그러나, 이러한 설명은 제한적인 의미로 해석되는 것으로 의도되지 않는다. 개시된 청구 대상과 관련된 당업자에게 명확한, 예시적인 실시형태의 여러 수정 및 변경뿐만 아니라, 시스템의 다른 실시형태가 본 발명의 범위에 포함되는 것으로 간주된다.
종래 기술(도 1 내지 도 10):
100 프레임워크 구조물
102 프레임워크 구조물의 직립 부재
103 프레임워크 구조물의 수평 부재
104 저장 그리드
105 저장 컬럼
106 저장 컨테이너
106' 저장 컨테이너의 특정 위치
107 적층체
108 레일 시스템
110 제1 방향(X)의 평행 레일
110a 제1 방향(X)의 제1 레일
110b 제1 방향(X)의 제2 레일
111 제2 방향(Y)의 평행 레일
111a 제2 방향(Y)의 제1 레일
111b 제2 방향(Y)의 제2 레일
112 접근 개구부
119 제1 포트 컬럼
120 제2 포트 컬럼
201 종래 기술의 저장 컨테이너 운반체
201a 저장 컨테이너 운반체(101)의 운반체 본체
201b 구동 수단/바퀴 배열체, 제1 방향(X)
201c 구동 수단/바퀴 배열체, 제2 방향(Y)
301 종래 기술의 외팔보 저장 컨테이너 운반체
301a 저장 컨테이너 운반체(101)의 운반체 본체
301b 제1 방향(X)의 구동 수단
301c 제2 방향(Y)의 구동 수단
X 제1 방향
Y 제2 방향
Z 제3 방향
401 전달 운반체
501 컨테이너 상승 플랫폼
502 컨테이너
503 측정 플랫폼
504 테스팅 스테이션
601 컨테이너 배치 면적
801 판
100 프레임워크 구조물
102 프레임워크 구조물의 직립 부재
103 프레임워크 구조물의 수평 부재
104 저장 그리드
105 저장 컬럼
106 저장 컨테이너
106' 저장 컨테이너의 특정 위치
107 적층체
108 레일 시스템
110 제1 방향(X)의 평행 레일
110a 제1 방향(X)의 제1 레일
110b 제1 방향(X)의 제2 레일
111 제2 방향(Y)의 평행 레일
111a 제2 방향(Y)의 제1 레일
111b 제2 방향(Y)의 제2 레일
112 접근 개구부
119 제1 포트 컬럼
120 제2 포트 컬럼
201 종래 기술의 저장 컨테이너 운반체
201a 저장 컨테이너 운반체(101)의 운반체 본체
201b 구동 수단/바퀴 배열체, 제1 방향(X)
201c 구동 수단/바퀴 배열체, 제2 방향(Y)
301 종래 기술의 외팔보 저장 컨테이너 운반체
301a 저장 컨테이너 운반체(101)의 운반체 본체
301b 제1 방향(X)의 구동 수단
301c 제2 방향(Y)의 구동 수단
X 제1 방향
Y 제2 방향
Z 제3 방향
401 전달 운반체
501 컨테이너 상승 플랫폼
502 컨테이너
503 측정 플랫폼
504 테스팅 스테이션
601 컨테이너 배치 면적
801 판
Claims (15)
- 물품을 저장하기 위한 저장 컨테이너(502) 내에서 측정을 수행하기 위한 시스템으로서, 상기 저장 컨테이너(502)는 상기 저장 컨테이너(502)를 저장하기 위한 3-차원적인 저장 그리드 구조물(104)을 형성하는 프레임워크 구조물(100)을 포함하는 자동화된 저장 시스템 내에 저장되고, 상기 그리드 구조물(104)은 수직 저장 컬럼(105)을 형성하고, 각각의 수직 저장 컬럼은 상기 수직 저장 컬럼(105)의 접근 개구부(112)의 크기에 의해서 형성되는 수평 면적을 갖고, 레일 시스템(108)이, 각각의 저장 컬럼(105)의 상단부에서 각각의 접근 개구부(112)의 원주를 형성하는 상기 프레임워크 구조물(100) 상에 배열되고, 상기 레일 시스템(108)은 상기 저장 컨테이너(502)를 핸들링하고 상기 저장 컬럼(105)으로 그리고 그로부터 전달하는 컨테이너 핸들링 운반체(201)를 위한 이용 가능 루트를 제공하는, 시스템에 있어서, 상기 시스템은, 대기 조건을 측정하기 위한 그리고 상기 저장 컨테이너(502) 내에서 측정을 수행하기 위한 측정 장비를 갖춘, 상기 레일 시스템(108)을 통해서 컨테이너 핸들링 운반체에 접근할 수 있는, 테스팅 스테이션(504)을 더 포함하고, 상기 테스팅 스테이션(504)은 측정 데이터를 컴퓨터 시스템에 통신하도록 구성되는 것을 특징으로 하는, 시스템.
- 제1항에 있어서,
상기 테스팅 스테이션은 측정 장비를 갖춘 측정 플랫폼(503)이 부착되는 상부 부분(505), 컨테이너(502)를 유지하기 위한 하부 부분(601), 및 상기 상부 부분(505)과 하부 부분(601)을 연결하기 위한 연결 수단을 포함하는, 시스템. - 제2항에 있어서,
상기 하부 부분(601)은 레일의 세트 아래에서 공동을 포함하고, 저장 컨테이너(502)가 상기 공동 내로 하강될 수 있는, 시스템. - 제2항에 있어서,
상기 하부 부분(601)은 그 위에 트랙의 세트를 갖는 판(801)을 포함하는, 시스템. - 제1항 내지 제5항 중 어느 한 항에 있어서,
상기 테스팅 스테이션은, 저장 컨테이너(502)를 수용하도록 구성된, 상기 상부 부분(505)과 상기 하부 부분(601) 사이의 공간을 포함하는, 시스템. - 제2항 내지 제4항 중 어느 한 항에 있어서,
상기 테스팅 스테이션은 상기 측정 플랫폼(503)을 상승 및 하강시키도록 구성된 승강 장치를 포함하는, 시스템. - 제1항 내지 제6항 중 어느 한 항에 있어서,
상기 테스팅 스테이션은 상단부에서 저장 컨테이너(502)를 갖는 컨테이너 핸들링 운반체를 수용하도록 구성되는, 시스템. - 제1항 내지 제7항 중 어느 한 항에 있어서,
상기 측정 장비(503)가 전기 모터에 의해서 제어되는 로프, 밴드 또는 와이어에 의해서 상승 및 하강되는, 시스템. - 제1항 내지 제8항 중 어느 한 항에 있어서,
상기 측정 장비가 로봇 아암에 의해서 상승 및 하강되는, 시스템. - 제1항 내지 제7항 중 어느 한 항에 있어서,
상기 측정 장비가 온도 측정 장비, 수분 검출기, 가스 검출기 및/또는 카메라를 포함하는, 시스템. - 제1항 내지 제10항 중 어느 한 항에 있어서,
상기 저장 컨테이너(502) 내에 저장된 물품 상의 곰팡이를 검출하기 위한 UV 광원을 더 포함하는, 시스템. - 제1항 내지 제11항 중 어느 한 항에 있어서,
상기 저장 컨테이너(502) 내에 저장된 물품 상의 곰팡이, 바이러스 및 박테리아를 사멸하기 위한 UV-C 광원을 더 포함하는, 시스템. - 테스팅 스테이션(504)을 이용하여, 물품을 저장하기 위한 저장 컨테이너(502) 내에서 측정을 수행하기 위한 방법이며, 상기 저장 컨테이너(502)는 상기 저장 컨테이너(502)를 저장하기 위한 3-차원적인 저장 그리드 구조물(104)을 형성하는 프레임워크 구조물(100)을 포함하는 자동화된 저장 시스템 내에 저장되고, 상기 그리드 구조물(104)은 수직 저장 컬럼(105)을 형성하고, 각각의 수직 저장 컬럼은 상기 수직 저장 컬럼(105)의 접근 개구부(112)의 크기에 의해서 형성되는 수평 면적을 갖고, 레일 시스템(108)이, 각각의 저장 컬럼(105)의 상단부에서 각각의 접근 개구부(112)의 원주를 형성하는 상기 프레임워크 구조물(100) 상에 배열되고, 상기 레일 시스템(108)은 상기 저장 컨테이너(502)를 핸들링하고 상기 저장 컬럼(105)으로 그리고 그로부터 전달하는 컨테이너 핸들링 운반체(201)를 위한 이용 가능 루트를 제공하고, 각각의 운반체(201, 301, 401)는 상기 저장 시스템의 동작을 제어하는 중앙 컴퓨터 시스템과 통신하는 운반체 제어기(230)를 포함하고, 상기 방법은:
- 저장 컨테이너(502)를 컨테이너 핸들링 운반체(201, 301, 401)로 상기 테스팅 스테이션(504) 내에 배치하는 단계,
- 상기 테스팅 스테이션(504)에 부착된 측정 장비(503)를 상기 저장 컨테이너(502) 상으로 제공하는 단계,
- 측정 데이터를 수집하기 위해서 측정을 수행하는 단계,
- 상기 측정 데이터를 컴퓨터 시스템에 전송하는 단계,
- 상기 전송된 측정 데이터를 저장하고 상기 측정 데이터의 분석을 수행하는 단계,
- 상기 분석의 결과를 기초로, 상기 컨테이너를 운송하는 곳에 관한 명령어를, 상기 중앙 컴퓨터 시스템으로부터 상기 컨테이너 핸들링 운반체로 전송하는 단계,
- 상기 측정 장비를 상승시키는 단계,
- 컨테이너 핸들링 운반체로 상기 저장 컨테이너(502)를 다음 목적지로 운송하는 단계를 포함하는, 방법. - 제13항에 있어서,
상기 저장 컨테이너(502) 내의 온도, 수분 및/또는 가스 레벨의 측정을 수행하는 및/또는 상기 물품의 시각적 검사를 위해서 카메라를 이용하는, 방법. - 제14항에 있어서,
상기 가스 검출기가 상기 저장 컨테이너(502) 내로 하강되는, 방법.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| NO20200120 | 2020-01-31 | ||
| NO20200120A NO345921B1 (en) | 2020-01-31 | 2020-01-31 | System and method for performing measurements in storage containers |
| PCT/EP2021/051779 WO2021151906A1 (en) | 2020-01-31 | 2021-01-26 | Sensor testing station |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20220132616A true KR20220132616A (ko) | 2022-09-30 |
Family
ID=74347085
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020227029576A KR20220132616A (ko) | 2020-01-31 | 2021-01-26 | 센서 테스팅 스테이션 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US20230056161A1 (ko) |
| EP (2) | EP4097029B1 (ko) |
| JP (1) | JP2023512240A (ko) |
| KR (1) | KR20220132616A (ko) |
| CN (1) | CN115038655A (ko) |
| CA (1) | CA3164334A1 (ko) |
| NO (1) | NO345921B1 (ko) |
| WO (1) | WO2021151906A1 (ko) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024083632A1 (en) * | 2022-10-18 | 2024-04-25 | Autostore Technology AS | A container transport vehicle with internal receiving space for receiving a storage container from another vehicle, associated system and methods |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10034435B2 (en) * | 2012-10-26 | 2018-07-31 | GreenTech Agro LLC | Self-sustaining artificially controllable environment within a storage container or other enclosed space |
| NO334806B1 (no) | 2012-11-13 | 2014-06-02 | Jakob Hatteland Logistics As | Lagringssystem |
| NO335839B1 (no) | 2012-12-10 | 2015-03-02 | Jakob Hatteland Logistics As | Robot for transport av lagringsbeholdere |
| NO337544B1 (no) | 2014-06-19 | 2016-05-02 | Jakob Hatteland Logistics As | Fjernstyrt kjøretøysammenstilling for å plukke opp lagringsbeholdere fra et lagringssystem |
| KR20240024346A (ko) * | 2015-04-15 | 2024-02-23 | 오카도 이노베이션 리미티드 | 보관 시스템 및 방법 |
| EP3326452B1 (en) * | 2016-11-24 | 2020-06-10 | Heliospectra AB | Cultivation storage system |
| NO20170216A1 (en) | 2017-02-13 | 2018-08-14 | Autostore Tech As | Rail arrangement for wheeled vehicles in a storage system |
| CN109720830B (zh) * | 2017-10-30 | 2024-02-20 | 杭州海康机器人股份有限公司 | 自动导向搬运车的上件装置及其控制方法、上件控制系统 |
| GB201720633D0 (en) * | 2017-12-11 | 2018-01-24 | Ocado Innovation Ltd | Robotic parking device and handling method |
| CN207844078U (zh) * | 2018-02-08 | 2018-09-11 | 深圳捷佳德现金自动化处理设备有限公司 | 一种利用机器人的高密度智能仓储系统 |
| NO344302B1 (en) * | 2018-04-25 | 2019-10-28 | Autostore Tech As | Automated storage and retrieval system comprising a relay module and a method of operating such a system |
| GB201809020D0 (en) * | 2018-06-01 | 2018-07-18 | Ocado Innovation Ltd | Control device and method for item verification |
| CN110304388B (zh) * | 2019-07-10 | 2021-03-02 | 四川易景智能终端有限公司 | 无人仓库智能调度系统 |
-
2020
- 2020-01-31 NO NO20200120A patent/NO345921B1/en unknown
-
2021
- 2021-01-26 WO PCT/EP2021/051779 patent/WO2021151906A1/en active Search and Examination
- 2021-01-26 KR KR1020227029576A patent/KR20220132616A/ko unknown
- 2021-01-26 CA CA3164334A patent/CA3164334A1/en active Pending
- 2021-01-26 EP EP21702233.4A patent/EP4097029B1/en active Active
- 2021-01-26 US US17/796,020 patent/US20230056161A1/en active Pending
- 2021-01-26 JP JP2022546003A patent/JP2023512240A/ja active Pending
- 2021-01-26 EP EP24160715.9A patent/EP4371909A2/en active Pending
- 2021-01-26 CN CN202180012189.4A patent/CN115038655A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| EP4097029A1 (en) | 2022-12-07 |
| JP2023512240A (ja) | 2023-03-24 |
| US20230056161A1 (en) | 2023-02-23 |
| NO20200120A1 (en) | 2021-08-02 |
| WO2021151906A1 (en) | 2021-08-05 |
| EP4097029B1 (en) | 2024-04-24 |
| EP4371909A2 (en) | 2024-05-22 |
| CA3164334A1 (en) | 2021-08-05 |
| NO345921B1 (en) | 2021-10-25 |
| CN115038655A (zh) | 2022-09-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20230053090A1 (en) | System and method for performing measurements in storage containers | |
| US20230065714A1 (en) | Conveyor system | |
| CN113950453B (zh) | 储存系统 | |
| JP2022545665A (ja) | コンテナを輸送する送達システム、自動倉庫システム、および方法 | |
| KR20220132616A (ko) | 센서 테스팅 스테이션 | |
| KR20230048123A (ko) | 3-차원적인 보관 시스템의 트랙의 이상을 검출하기 위한 시스템 및 방법 | |
| KR20220131997A (ko) | 자동화된 저장 및 회수 시스템에서 대기 상태를 모니터링하기 위한 시스템 및 방법 | |
| US20230131214A1 (en) | Robotic consolidation station and storage system | |
| TW202334012A (zh) | 一種車輛可攜式電網評估裝置 | |
| NO346814B1 (en) | Container handler and method for handling a storage container | |
| NO346957B1 (en) | A gripper assembly | |
| JP3101850B2 (ja) | 原子力燃料ペレット検査品の搬送管理装置 | |
| CN118103306A (zh) | 用于配送货物保持器中容纳的货物的配送端口 | |
| CN117794834A (zh) | 用于组装混合货盘和便于订单拣选的自动仓库系统、组件、设备和方法 |