KR20220080477A - 광학식 줌을 지원하는 카메라 모듈 및 이를 포함하는 전자 장치 - Google Patents
광학식 줌을 지원하는 카메라 모듈 및 이를 포함하는 전자 장치 Download PDFInfo
- Publication number
- KR20220080477A KR20220080477A KR1020200169625A KR20200169625A KR20220080477A KR 20220080477 A KR20220080477 A KR 20220080477A KR 1020200169625 A KR1020200169625 A KR 1020200169625A KR 20200169625 A KR20200169625 A KR 20200169625A KR 20220080477 A KR20220080477 A KR 20220080477A
- Authority
- KR
- South Korea
- Prior art keywords
- coil
- optical axis
- electronic device
- lens assembly
- driving magnet
- Prior art date
Links
- 230000003287 optical effect Effects 0.000 title claims abstract description 118
- 238000000034 method Methods 0.000 claims description 33
- 238000004804 winding Methods 0.000 claims description 15
- 238000004891 communication Methods 0.000 description 49
- 230000006870 function Effects 0.000 description 44
- 238000001514 detection method Methods 0.000 description 26
- 238000012545 processing Methods 0.000 description 14
- 238000013528 artificial neural network Methods 0.000 description 9
- 238000005516 engineering process Methods 0.000 description 9
- 239000003381 stabilizer Substances 0.000 description 7
- 230000008859 change Effects 0.000 description 6
- 238000010586 diagram Methods 0.000 description 6
- 238000013473 artificial intelligence Methods 0.000 description 5
- 238000004590 computer program Methods 0.000 description 4
- 230000005684 electric field Effects 0.000 description 4
- 230000003993 interaction Effects 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- 230000006641 stabilisation Effects 0.000 description 3
- 238000011105 stabilization Methods 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 230000000712 assembly Effects 0.000 description 2
- 238000000429 assembly Methods 0.000 description 2
- 238000013527 convolutional neural network Methods 0.000 description 2
- 230000009977 dual effect Effects 0.000 description 2
- 238000010801 machine learning Methods 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000000306 recurrent effect Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000002457 bidirectional effect Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000010267 cellular communication Effects 0.000 description 1
- 230000001413 cellular effect Effects 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 230000005674 electromagnetic induction Effects 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 238000009499 grossing Methods 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000003155 kinesthetic effect Effects 0.000 description 1
- 239000000696 magnetic material Substances 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000001537 neural effect Effects 0.000 description 1
- 238000011017 operating method Methods 0.000 description 1
- 230000001151 other effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000002787 reinforcement Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000005236 sound signal Effects 0.000 description 1
- 230000000638 stimulation Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 238000003786 synthesis reaction Methods 0.000 description 1
- 230000002194 synthesizing effect Effects 0.000 description 1
- 229910052724 xenon Inorganic materials 0.000 description 1
- FHNFHKCVQCLJFQ-UHFFFAOYSA-N xenon atom Chemical compound [Xe] FHNFHKCVQCLJFQ-UHFFFAOYSA-N 0.000 description 1
Images








Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/54—Mounting of pick-up tubes, electronic image sensors, deviation or focusing coils
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
- G02B7/10—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification by relative axial movement of several lenses, e.g. of varifocal objective lens
- G02B7/102—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification by relative axial movement of several lenses, e.g. of varifocal objective lens controlled by a microcomputer
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
- G02B7/08—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification adapted to co-operate with a remote control mechanism
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
- G02B7/09—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification adapted for automatic focusing or varying magnification
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B13/00—Viewfinders; Focusing aids for cameras; Means for focusing for cameras; Autofocus systems for cameras
- G03B13/32—Means for focusing
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B17/00—Details of cameras or camera bodies; Accessories therefor
- G03B17/02—Bodies
- G03B17/12—Bodies with means for supporting objectives, supplementary lenses, filters, masks, or turrets
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B17/00—Details of cameras or camera bodies; Accessories therefor
- G03B17/02—Bodies
- G03B17/17—Bodies with reflectors arranged in beam forming the photographic image, e.g. for reducing dimensions of camera
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B3/00—Focusing arrangements of general interest for cameras, projectors or printers
- G03B3/10—Power-operated focusing
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B30/00—Camera modules comprising integrated lens units and imaging units, specially adapted for being embedded in other devices, e.g. mobile phones or vehicles
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B5/00—Adjustment of optical system relative to image or object surface other than for focusing
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/20—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for measuring, monitoring, testing, protecting or switching
- H02K11/21—Devices for sensing speed or position, or actuated thereby
- H02K11/215—Magnetic effect devices, e.g. Hall-effect or magneto-resistive elements
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K41/00—Propulsion systems in which a rigid body is moved along a path due to dynamo-electric interaction between the body and a magnetic field travelling along the path
- H02K41/02—Linear motors; Sectional motors
- H02K41/03—Synchronous motors; Motors moving step by step; Reluctance motors
- H02K41/031—Synchronous motors; Motors moving step by step; Reluctance motors of the permanent magnet type
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/57—Mechanical or electrical details of cameras or camera modules specially adapted for being embedded in other devices
-
- H04N5/2253—
-
- H04N5/2254—
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B2205/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B2205/0007—Movement of one or more optical elements for control of motion blur
- G03B2205/0023—Movement of one or more optical elements for control of motion blur by tilting or inclining one or more optical elements with respect to the optical axis
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B2205/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B2205/0046—Movement of one or more optical elements for zooming
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B2205/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B2205/0053—Driving means for the movement of one or more optical element
- G03B2205/0069—Driving means for the movement of one or more optical element using electromagnetic actuators, e.g. voice coils
Abstract
본 문서의 일 실시 예에 따른 전자 장치는, 제1 광축을 따라 배열되는 렌즈 어셈블리, 상기 렌즈 어셈블리에 결합되고 상기 제1 광축을 따라 교대로 배치되는 N극 및 S극을 적어도 2회 포함하는 구동 마그넷, 상기 구동 마그넷과 대면하고 상기 제1 광축을 따라 나란히 배치되는 제1 코일 및 제2 코일, 및 상기 제1 코일 및 상기 제2 코일과 전기적으로 연결되는 제어 회로를 포함할 수 있다. 상기 제어 회로는 상기 제1 코일에 인가되는 제1 전류 및 상기 제2 코일에 인가되는 제2 전류를 제어하여, 상기 렌즈 어셈블리가 상기 제1 코일 및 상기 제2 코일에 대해 상기 제1 광축 방향으로 이동하도록 제어할 수 있다. 이 외에도 명세서를 통해 파악되는 다양한 실시 예가 가능하다.
Description
본 개시는 광학식 줌을 지원하는 카메라 모듈과 이를 포함하는 전자 장치에 관한 것이다.
기존의 모바일 디바이스에서는 줌(zoom) 기능을 구현하기 위해 스텝 줌(step zoom) 방식을 이용하였다. 스텝 줌 방식이란 특정한 초점 거리를 가지는 복수의 카메라들, 예를 들면, 13mm, 26mm, 및 52mm의 초점 거리를 가지는 3개의 카메라를 모바일 디바이스에 실장하고, 상기 특정한 초점 거리를 가지는 이미지를 획득하는 방식이다.
또한 모바일 디바이스는 AF(auto focus) 기능을 구현하기 위해 볼 베어링 액추에이터(ball bearing actuator)를 이용하였다. 볼 베어링 액추에이터를 이용하는 카메라 모듈은 코일과 마그넷을 포함할 수 있고, 카메라 모듈은 코일에 인가되는 전류를 제어하여 렌즈 어셈블리(lens assembly)를 광축 방향으로 이동시킬 수 있다.
모바일 디바이스는 다양한 기술들을 구현할 수 있는 카메라 모듈을 실장할 것이 요구됨과 동시에, 휴대성 향상에 대한 요구도 존재한다.
스텝 줌 방식을 이용하는 경우, 특정한 초점 거리 외에 다른 초점 거리를 가지는 이미지를 획득하기 위해서는 특정한 초점 거리를 가지는 복수의 이미지들을 합성하여 디지털 줌(digital zoom) 이미지를 생성해야 한다. 디지털 줌 이미지의 경우, 렌즈 어셈블리의 이동으로 초점 거리를 변화시키는 광학식 줌(optical zoom) 이미지와 비교할 때 해상도가 떨어지는 문제가 있다.
볼 베어링 액추에이터는 약 1mm의 짧은 스트로크(stroke)를 가진다. 광학식 줌 기능을 구현하기 위해서는 렌즈 어셈블리를 약 10mm 이상 이동할 필요가 있기 때문에, 기존의 액추에이터를 활용하여 광학식 줌 기능을 구현하기에는 스트로크가 짧다는 문제가 있다.
본 문서에 개시되는 다양한 실시 예들은, 모바일 디바이스의 두께를 증가시키지 않으면서도 광학식 줌을 지원할 수 있는 액추에이터와 이를 포함하는 카메라 모듈을 제시한다.
본 문서의 일 실시 예에 따른 전자 장치(electronic device)는, 제1 광축을 따라 배열되는 렌즈 어셈블리, 상기 렌즈 어셈블리에 결합되고 상기 제1 광축을 따라 교대로 배치되는 N극 및 S극을 적어도 2회 포함하는 구동 마그넷, 상기 구동 마그넷과 대면하고 상기 제1 광축을 따라 나란히 배치되는 제1 코일 및 제2 코일, 및 상기 제1 코일 및 상기 제2 코일과 전기적으로 연결되는 제어 회로를 포함할 수 있다. 상기 제어 회로는 상기 제1 코일에 인가되는 제1 전류 및 상기 제2 코일에 인가되는 제2 전류를 제어하여, 상기 렌즈 어셈블리가 상기 제1 코일 및 상기 제2 코일에 대해 상기 제1 광축 방향으로 이동하도록 제어할 수 있다.
본 문서의 일 실시 예에 따른 전자 장치의 동작 방법은, 상기 전자 장치에 포함된 제어 회로가 제1 코일에 제1 전류를 인가하고, 제2 코일에 제2 전류를 인가하는 동작, 상기 제1 코일 및 상기 제2 코일은 제1 광축을 따라 나란히 배치됨, 상기 제어 회로가 상기 제1 코일 및 상기 제2 코일에 대면하고 상기 제1 광축을 따라 교대로 배치되는 N극 및 S극을 적어도 2회 포함하는 구동 마그넷을 상기 제1 광축 방향으로 이동하도록 제어하여, 상기 구동 마그넷에 결합되고 상기 제1 광축을 따라 배열되는 렌즈 어셈블리가 상기 제1 광축 방향으로 이동하도록 제어하는 동작을 포함할 수 있다.
본 문서의 일 실시 예에 따른 카메라 모듈은, 제1 광축을 따라 배열되는 렌즈 어셈블리, 상기 렌즈 어셈블리에 결합되고 상기 제1 광축을 따라 교대로 배치되는 N극 및 S극을 적어도 2회 포함하는 구동 마그넷, 및 상기 구동 마그넷과 대면하고 상기 제1 광축을 따라 나란히 배치되는 제1 코일 및 제2 코일을 포함할 수 있다. 상기 제1 코일 및 상기 제2 코일에 인가되는 전류에 따라 상기 렌즈 어셈블리는 상기 제1 광축을 따라 이동할 수 있고, 상기 구동 마그넷의 상기 N극 사이의 거리는 상기 제1 코일의 중심과 상기 제2 코일의 중심에 대해 지정된 비율을 가질 수 있다.
본 문서에 개시되는 다양한 실시 예에 따르면, 약 10mm 이상의 스트로크를 가지는 액추에이터와 상기 액추에이터를 포함하는 카메라 모듈을 구현할 수 있다. 상기 카메라 모듈을 포함하는 모바일 디바이스는 광학식 줌 기능을 통한 이미지를 획득할 수 있다. 광학식 줌 이미지는 디지털 줌 이미지와 비교할 때 연속적인 초점 거리를 가질 수 있고, 해상도가 감소하지 않을 수 있다.
본 문서에 개시되는 다양한 실시 예에 따르면, 기존에 AF 기능을 구현하기 위해 이용된 액추에이터에 포함되는 구성 및 부품들을 이용할 수 있다. 따라서 AF 기능을 위해 이용되는 정도의 제어 정밀도는 유지하면서도 추가로 필요한 비용은 최소화할 수 있다.
본 개시에서 얻을 수 있는 효과는 이상에서 언급한 효과들로 제한되지 않으며, 언급하지 않은 또 다른 효과들은 아래의 기재로부터 본 개시가 속하는 기술 분야에서 통상의 지식을 가진 자에게 명확하게 이해될 수 있다.
도 1은 일 실시 예에 따른 전자 장치를 도시한다.
도 2는 일 실시 예에 따른 전자 장치의 단면을 도시한다.
도 3은 일 실시 예에 따른 전자 장치에 포함된 카메라 모듈의 사시도이다.
도 4는 일 실시 예에 따른 카메라 모듈의 분해사시도이다.
도 5는 일 실시 예에 따른 렌즈 어셈블리, 구동 마그넷, 및 코일의 배치를 도시한다.
도 6은 일 실시 예에 따른, 제1 코일 또는 제2 코일의 제어에 따른 구동 마그넷의 이동을 도시한다.
도 7은 일 실시 예에 따라 제1 홀 센서와 제2 홀 센서의 검출 신호 값을 도시하는 그래프이다.
도 8은 일 실시 예에 따른 제1 코일과 제2 코일의 형태를 도시한다.
도 9는 일 실시 예에 따라 센싱 마그넷을 포함하는 카메라 모듈의 일부를 도시한다.
도 10은 다양한 실시 예들에 따른, 네트워크 환경 내의 전자 장치의 블록도이다.
도 11는 다양한 실시 예들에 따른, 카메라 모듈을 예시하는 블록도이다.
도 2는 일 실시 예에 따른 전자 장치의 단면을 도시한다.
도 3은 일 실시 예에 따른 전자 장치에 포함된 카메라 모듈의 사시도이다.
도 4는 일 실시 예에 따른 카메라 모듈의 분해사시도이다.
도 5는 일 실시 예에 따른 렌즈 어셈블리, 구동 마그넷, 및 코일의 배치를 도시한다.
도 6은 일 실시 예에 따른, 제1 코일 또는 제2 코일의 제어에 따른 구동 마그넷의 이동을 도시한다.
도 7은 일 실시 예에 따라 제1 홀 센서와 제2 홀 센서의 검출 신호 값을 도시하는 그래프이다.
도 8은 일 실시 예에 따른 제1 코일과 제2 코일의 형태를 도시한다.
도 9는 일 실시 예에 따라 센싱 마그넷을 포함하는 카메라 모듈의 일부를 도시한다.
도 10은 다양한 실시 예들에 따른, 네트워크 환경 내의 전자 장치의 블록도이다.
도 11는 다양한 실시 예들에 따른, 카메라 모듈을 예시하는 블록도이다.
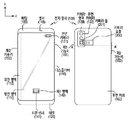
도 1은 일 실시 예에 따른 전자 장치(100)를 도시한다.
도 1을 참고하면, 일 실시 예에 따른 전자 장치(100)의 전면에는 디스플레이(110)가 배치될 수 있다. 일 실시 예에서, 디스플레이(110)는 전자 장치(100)의 전면의 대부분을 차지할 수 있다. 전자 장치(100)의 전면에는 디스플레이(110), 및 디스플레이(110)의 적어도 일부 가장자리를 둘러싸는 베젤(bezel)(120) 영역이 배치될 수 있다. 도 1의 예시에서, 디스플레이(110)는 평면 영역(flat area)(111)과, 평면 영역(111)에서 전자 장치(100)의 측면을 향해 연장되는 곡면 영역(curved area)(112)을 포함할 수 있다. 도 1에서는 일측(예: 좌측)에 대해서만 곡면 영역(112)을 표시하였으나, 반대측에도 동일하게 곡면 영역이 형성되는 것으로 이해될 수 있다. 또한, 도 1의 도시된 전자 장치(100)는 하나의 예시이며, 다양한 실시 예가 가능하다. 예를 들어, 전자 장치(100)의 디스플레이(110)는 곡면 영역(112)없이 평면 영역(111)만 포함하거나, 양측이 아닌 한쪽 가장자리에만 곡면 영역(112)을 구비할 수 있다. 또한 일 실시 예에서, 곡면 영역은 전자 장치(100)의 후면으로 연장되어, 전자 장치(100)는 추가적인 평면 영역을 구비할 수도 있다.
일 실시 예에서, 디스플레이(110)의 제1 영역(140)에 사용자의 지문 인식을 위한 지문 센서(141)가 포함될 수 있다. 지문 센서(141)는 디스플레이(110)의 아래 층에 배치됨으로써, 사용자에 의해 시인되지 않거나, 시인이 어렵게 배치될 수 있다. 또한, 지문 센서(141) 외에 추가적인 사용자/생체 인증을 위한 센서가 디스플레이(110)의 일부 영역에 배치될 수 있다. 다른 실시 예에서, 사용자/생체 인증을 위한 센서는 베젤(120)의 일 영역에 배치될 수 있다. 예를 들어, 홍채 인증을 위한 IR(infrared) 센서가 디스플레이(110)의 일 영역을 통해 노출되거나, 베젤(120)의 일 영역을 통해 노출될 수 있다.
일 실시 예에서, 전자 장치(100)의 베젤(120) 중 적어도 일 영역 또는 디스플레이(110)의 적어도 일 영역에 센서(143)가 포함될 수 있다. 상기 센서(143)는 거리 감지를 위한 센서 및/또는 객체 검출을 하기 위한 센서일 수 있다. 예를 들면, 상기 센서(143)는 IR 카메라(예: TOF(time of flight) 카메라, structured light 카메라)의 적어도 일부로 동작하거나 센서 모듈의 적어도 일부로 동작될 수 있다.
일 실시 예에서, 전자 장치(100)의 전면에는 전면 카메라(131)가 배치될 수 있다. 도 1의 실시 예에서는 전면 카메라(131)가 디스플레이(110)의 일 영역을 통해 노출되는 것으로 도시되었으나, 다른 실시 예에서 전면 카메라(131)가 베젤(120)을 통해 노출될 수 있다.
일 실시 예에서, 디스플레이(110)는 화면 표시 영역(예: 평면 영역(111), 곡면 영역(112))의 배면에, 센서 모듈, 카메라 모듈(예: 전면 카메라(131)), 및 발광 소자(예: LED) 중 적어도 하나 이상을 포함할 수 있다.
일 실시 예에서, 전자 장치(100)의 전면, 측면 중 적어도 하나의 면의 배면에, 카메라 모듈(미도시)이 상기 전면 및/또는 상기 측면을 향하도록 배치될 수 있다. 예를 들어, 전면 카메라(131)는 화면 표시 영역(예: 평면 영역(111), 곡면 영역(112))으로 시각적으로 노출되지 않을 수 있고, 감춰진 디스플레이 배면 카메라(UDC, under display camera)를 포함할 수 있다. 일 실시 예에서, 전자 장치(100)는 하나 이상의 전면 카메라(131)를 포함할 수 있다. 예를 들어, 전자 장치(100)는 제1 전면 카메라 및 제2 전면 카메라와 같이 2개의 전면 카메라를 포함할 수 있다. 일 실시 예에서, 제1 전면 카메라와 제2 전면 카메라는 동등한 사양(예: 화소)을 가지는 동종의 카메라일 수 있으나, 제1 전면 카메라와 제2 전면 카메라는 다른 사양의 카메라로 구현될 수 있다. 전자 장치(100)는 2개의 전면 카메라를 통해 듀얼 카메라와 관련된 기능(예: 3D 촬영, AF)을 지원할 수 있다.
일 실시 예에서, 전자 장치(100)의 후면에는 후면 카메라(132)가 배치될 수 있다. 후면 카메라(132)의 일부는 후면 커버(160)의 카메라 영역(130)을 통해 노출될 수 있다. 후면 카메라(132)는 카메라 모듈(200)을 포함할 수 있다. 후면 커버(160)의 배면에는 상기 후면을 향하도록 카메라 모듈(200)이 배치될 수 있다.
일 실시 예에 따르면, 카메라 영역(130)에는 카메라 홀(201)이 위치할 수 있다. 카메라 모듈(200)은 카메라 홀(201)을 통해 입사되는 광에 대응하는 이미지를 획득할 수 있다. 전자 장치(100)의 카메라 홀(201)이 배치되는 면을 전자 장치(100)의 후면이라고 지칭할 수 있다.
일 실시 예에서, 카메라 홀(201)을 포함하는 전자 장치(100)의 후면 중 적어도 일부 영역(예: 카메라 영역(130))은 전자 장치(100)의 후면 중 나머지 영역보다 돌출되어 있을 수 있다. 예를 들면, 후면 커버(160)의 나머지 영역에 비하여 카메라 영역(130)이 돌출되어 있을 수 있다. 다른 실시 예에서, 카메라 홀(201)을 포함하는 전자 장치(100)의 후면은 돌출되는 부분이 없이 평평한 평면을 형성할 수 있다. 예를 들면, 카메라 영역(130)이 후면 커버(160)의 나머지 영역보다 돌출되어 있지 않을 수 있다.
일 실시 예에서, 전자 장치(100)는 카메라 영역(130)에 배치되는 다수의 후면 카메라(132)를 포함할 수 있다. 예를 들어, 전자 장치(100)는 2개 이상의 후면 카메라(132)를 포함할 수 있다. 예를 들어, 전자 장치(100)는 제1 후면 카메라, 제2 후면 카메라, 및 제3 후면 카메라를 포함할 수 있다. 제1 후면 카메라, 제2 후면 카메라, 및 제3 후면 카메라는 서로 다른 사양을 가질 수 있다. 예를 들어, 제1 후면 카메라와 제2 후면 카메라 및/또는 제3 후면 카메라의 FOV(field of view), 화소, 조리개, OIS(optical image stabilization, 이미지 흔들림 보정) 기능의 지원 여부, 각 카메라에 포함되는 렌즈 세트의 종류 및/또는 배열 등은 서로 다를 수 있다. 본 문서의 실시 예들에서, 전면 카메라(131)의 기능이나 특성에 대한 설명은 후면 카메라(132)에 대해 적용될 수 있으며, 그 역도 같다.
일 실시 예에서, 전자 장치(100)가 다수의 후면 카메라(132)를 포함하는 경우, 다수의 후면 카메라(132) 중 적어도 하나의 후면 카메라(132)는 카메라 모듈(200)을 포함할 수 있다.
일 실시 예에서, 전자 장치(100)의 후면 카메라(132)에 포함되는 카메라 모듈(200)의 z 방향의 길이는 y 방향의 길이보다 길게 배치될 수 있다. 예를 들면, 카메라 모듈(200)은 전자 장치(100)의 가로 방향(예: z 방향)으로 긴 형상을 가질 수 있다. 다른 실시 예에서, 카메라 모듈(200)은 도 1에서 도시된 카메라 모듈(200)을 x축을 기준으로 약 90도 회전시켜 세로 방향(예: y 방향)으로 긴 형상을 가질 수도 있다.
일 실시 예에서, 카메라 영역(130)에는 플래시와 같이 촬영을 보조하는 각종 하드웨어나 센서가 추가적으로 배치될 수 있다. 예를 들어, 피사체와 전자 장치(100) 사이의 거리를 감지하기 위한 거리 센서와 같은 다양한 센서가 더 포함될 수 있다. 예를 들면, 거리 센서는 IR 카메라(예: TOF 카메라, structured light 카메라)의 적어도 일부로 동작하거나 센서 모듈의 적어도 일부로 동작될 수 있다. 예를 들어, TOF 카메라는 피사체와의 거리를 감지하기 위한 센서 모듈의 적어도 일부로 동작될 수 있다.
일 실시 예에서, 전자 장치(100)의 측면부에는 적어도 하나의 물리 키가 배치될 수 있다. 예를 들어, 디스플레이(110)를 ON/OFF하거나 전자 장치(100)의 전원을 ON/OFF하기 위한 제1 기능 키(151)가 전자 장치(100)의 전면을 기준으로 우측 가장자리에 배치될 수 있다. 일 실시 예에서, 전자 장치(100)의 볼륨을 제어하거나 화면 밝기 등을 제어하기 위한 제2 기능 키(152)가 전자 장치(100)의 전면을 기준으로 좌측 가장자리에 배치될 수 있다. 이 외에도 추가적인 버튼이나 키가 전자 장치(100)의 전면이나 후면에도 배치될 수 있다. 예를 들어, 전면의 베젤(120) 중 하단 영역에 특정 기능에 맵핑된 물리 버튼이나 터치 버튼이 배치될 수 있다.
도 1에 도시된 전자 장치(100)는 하나의 예시에 해당하며, 본 문서에 개시된 기술적 사상이 적용되는 장치의 형태를 제한하는 것은 아니다. 예를 들면, 도시된 예의 전자 장치(100)는 바형(bar type), 또는 평판형(plate type)의 외관을 도시하고 있지만, 본 문서의 다양한 실시 예들은 이에 한정되지 않는다. 예를 들어, 도시된 전자 장치(100)는 롤러블 전자 장치의 일부일 수 있다. 롤러블 전자 장치(rollable electronic device)는 디스플레이(110)의 굽힘 변형이 가능해, 적어도 일부분이 말아지거나(wound or rolled), 전자 장치(100)의 내부로 수납될 수 있는 전자 장치로 이해될 수 있다. 롤러블 전자 장치는 사용자의 필요에 따라, 디스플레이(110)를 펼침으로써 또는 디스플레이(110)의 더 넓은 면적을 외부로 노출시킴으로써 화면 표시 영역(예: 평면 영역(111), 곡면 영역(112))을 확장하여 사용할 수 있다. 디스플레이(110)는 슬라이드 아웃 디스플레이(slide-out display) 또는 익스펜더블 디스플레이(expandable display)로 지칭될 수도 있다.
이하에서는 설명의 편의상 도 1에 도시된 전자 장치(100)를 기준으로 다양한 실시 예를 설명한다.
도 2는 일 실시 예에 따른 전자 장치(100)의 단면을 도시한다. 도 3은 일 실시 예에 따른 전자 장치(100)에 포함된 카메라 모듈(200)의 사시도이다. 도 4는 일 실시 예에 따른 카메라 모듈(200)의 분해사시도이다.
도 2는, 도 1에서 도시된 라인 A-A'를 따라 전자 장치(100)를 절개하여 나타난 단면을 +y 방향으로 바라본 모습을 개략적으로 나타낸 도면이다. 도 3은 도 1 및 도 2에서 도시된 전자 장치(100)에 포함된 카메라 모듈(200)을 도시한다. 도 4는 도 3에서 도시된 카메라 모듈(200)의 구성들을 분리하여 도시한다.
도 2를 참조하면, 전자 장치(100)는 카메라 모듈(200)을 포함할 수 있다. 카메라 모듈(200)은 하우징(260) 및 프리즘(270)을 포함할 수 있다. 카메라 모듈(200)은 z축 방향의 길이가 x축 방향의 길이보다 긴 형상을 가질 수 있다. 카메라 모듈(200)에 제2 광축(예: -x 방향)을 따라 입사된 광은, 프리즘(270)에 의해 반사되어 제1 광축(예: +z 방향)을 따라 진행될 수 있다.
일 실시 예에 따르면, 전자 장치(100)의 후면에서 카메라 영역(130)은 후면 커버(160)의 나머지 영역보다 돌출되어 있을 수 있다. 다른 실시 예에서, 카메라 영역(130)은 돌출되어 있지 않고 전자 장치(100)의 후면은 돌출되는 부분이 없이 평평한 평면으로 형성될 수 있다.
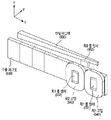
도 3을 참조하면, 카메라 모듈(200)은 하우징(260)에 대해 이동이 가능하게 설치된 제1 렌즈 어셈블리(211), 제2 렌즈 어셈블리(212) 중 적어도 하나의 렌즈 어셈블리를 포함할 수 있다. 일 실시 예에서, 카메라 모듈(200)은 하우징(260)에 고정된 제3 렌즈 어셈블리(213)를 더 포함할 수 있다.
일 실시 예에 따르면, 제1 렌즈 어셈블리(211), 제2 렌즈 어셈블리(212), 제3 렌즈 어셈블리(213)는 각각 제1 광축(예: z축 방향)을 따라 정렬된 복수의 렌즈들을 포함할 수 있다. 각 렌즈 어셈블리마다 포함하는 렌즈들의 개수 및 렌즈들의 특성(예: 배율)은 서로 다를 수 있다. 다른 실시 예에서, 제1 렌즈 어셈블리(211), 제2 렌즈 어셈블리(212), 제3 렌즈 어셈블리(213) 중 적어도 하나의 렌즈 어셈블리는 하나의 렌즈를 포함할 수 있다.
일 실시 예에 따르면, 제1 렌즈 어셈블리(211)는 제1 렌즈 캐리어(carrier)(221)를 통해 하우징(260)에 설치될 수 있다. 제1 렌즈 캐리어(221)는 제1 렌즈 어셈블리(211)를 수용하도록 구성될 수 있다. 제1 렌즈 어셈블리(211)는 제1 렌즈 캐리어(221)에 결합되어, 제1 렌즈 캐리어(221)와 일체로 움직일 수 있다. 예를 들면, 제1 렌즈 어셈블리(211)를 수용하는 제1 렌즈 캐리어(221)은 하우징(260)에 대해 +z 방향 및/또는 -z 방향으로 이동할 수 있다. 일 실시 예에서, 제1 렌즈 어셈블리(211)와 제1 렌즈 캐리어(221)는 일체로 형성될 수 있다. 이는 제2 렌즈 어셈블리(212)에도 동일하게 적용될 수 있다.
일 실시 예에 따르면, 제3 렌즈 어셈블리(213)는 하우징(260)에 설치될 수 있다. 제3 렌즈 어셈블리(213)는 하우징(260)에 고정되어 하우징(260)에 대해 이동할 수 없게 배치될 수 있다. 다른 실시 예에서, 제3 렌즈 어셈블리(213)는 제3 렌즈 캐리어(미도시)를 통해 하우징(260)에 설치되고, 제3 렌즈 캐리어는 하우징(260)에 대해 +z 방향 및/또는 -z 방향으로 이동할 수 있다.
일 실시 예에 따르면, 카메라 모듈(200)은 프리즘(270)을 포함할 수 있다. 프리즘(270)은 제3 렌즈 어셈블리(213)의 전방에 위치할 수 있다. 프리즘(270)은 제2 광축(예: -x 방향)을 따라 입사된 광을 약 90도 전환하여 제1 광축(예: +z 방향)을 따라 진행하도록 반사할 수 있다. 전자 장치(100)의 카메라 홀(201)을 통해 프리즘(270)에 제2 광축(예: -x 방향)을 따라 입사된 광은, 프리즘(270)에 의해 반사되어 제1 광축(예: +z 방향)을 따라 제3 렌즈 어셈블리(213)에 입사될 수 있다.
일 실시 예에 따르면, 프리즘(270)에 의해 반사된 광은 제3 렌즈 어셈블리(213)의 전방(예: -z 방향)에서 제1 렌즈 어셈블리(211)의 후방(예: +z 방향)으로 진행할 수 있다. 제3 렌즈 어셈블리(213)의 전방에서 제3 렌즈 어셈블리(213)의 최전방의 렌즈(예: 프리즘(270)과 적어도 일부 대면하는 렌즈)로 입사한 광은, 제3 렌즈 어셈블리(213), 제2 렌즈 어셈블리(212), 제1 렌즈 어셈블리(211)의 복수의 렌즈들을 거쳐 제1 렌즈 어셈블리(211)의 후방으로(예: 이미지 센서로) 진행할 수 있다.
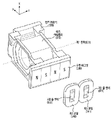
도 4를 참조하면, 카메라 모듈(200)은 하우징(260) 및 하우징(260)의 적어도 일부를 덮는 커버(269)를 포함할 수 있다.
일 실시 예에 따르면, 카메라 모듈(200)은 OIS 기능을 구현하기 위한 구성을 포함할 수 있다. 일 실시 예에서, 카메라 모듈(200)은 프리즘(270)의 각도를 조절하여 OIS 기능을 구현하기 위한 제1 OIS 코일(243), 제2 OIS 코일(244), 제3 OIS 코일(245), 제1 OIS 마그넷(233), 제2 OIS 마그넷(234), 제3 OIS 마그넷(235), 및 OIS 홀더(273)를 포함할 수 있다. 제1 OIS 코일(243)은 OIS 홀더(273)에 고정되고, OIS 홀더(273)는 하우징(260)에 결합될 수 있다. 제2 OIS 코일(244), 및 제3 OIS 코일(245)은 하우징(260)에 고정될 수 있다. 제1 OIS 마그넷(233), 제2 OIS 마그넷(234), 및 제3 OIS 마그넷(235)은 프리즘(270) 또는 프리즘 캐리어(271)에 고정되어 프리즘(270)과 일체로 움직일 수 있다. 카메라 모듈(200)은 프리즘(270)의 움직임(예: 회전)을 보조하는 프리즘 가이드(272)를 포함할 수 있다.
일 실시 예에 따르면, 카메라 모듈(200)은 제1 OIS 코일(243), 제2 OIS 코일(244), 제3 OIS 코일(245)과 전기적으로 연결된 제어 회로를 포함할 수 있고, 상기 제어 회로는 카메라 모듈(200)의 OIS 기능을 구현하기 위해 제1 OIS 코일(243), 제2 OIS 코일(244), 제3 OIS 코일(245) 중 적어도 하나의 코일에 인가되는 전류를 제어할 수 있다. 예를 들면, 제어 회로는 제1 OIS 코일(243)에 인가되는 전류를 제어하여, 프리즘(270)의 움직임(예: y축을 중심으로 회전)을 제어할 수 있다. 제1 OIS 코일(243)에 전류가 인가되는 경우, 제1 OIS 코일(243)과 제1 OIS 마그넷(233)의 상호 작용을 통해 프리즘(270)이 움직일 수 있다. 다른 예를 들면, 제어 회로는 제2 OIS 코일(244), 제3 OIS 코일(245) 중 적어도 하나의 코일에 인가되는 전류를 제어하여, 프리즘(270)의 움직임(예: x축을 중심으로 회전)을 제어할 수 있다. 제2 OIS 코일(244) 및/또는 제3 OIS 코일(245)에 전류가 인가되는 경우, 제2 OIS 코일(244)과 제2 OIS 마그넷(234)의 상호 작용 및/또는 제3 OIS 코일(245)과 제3 OIS 마그넷(235)의 상호 작용을 통해 프리즘(270)이 움직일 수 있다.
일 실시 예에 따르면, 카메라 모듈(200)은 프리즘 가이드(272)와 OIS 홀더(273) 사이의 갭에 적어도 하나의 볼을 포함하는 제1 OIS 볼 그룹(253)을 포함할 수 있고, 프리즘 캐리어(271)와 프리즘 가이드(272) 사이의 갭에 적어도 하나의 볼을 포함하는 제2 OIS 볼 그룹(254)를 포함할 수 있다. 카메라 모듈(200)은 제1 OIS 볼 그룹(253), 및 제2 OIS 볼 그룹(254)을 통해 프리즘(270)의 움직임(예: 회전)을 원활하게 할 수 있다. 예를 들면, 제1 OIS 볼 그룹(253)은 프리즘(270)이 y축을 중심으로 회전 운동을 할 때 발생하는 마찰력을 감소시킬 수 있고, 제2 OIS 볼 그룹(254)은 프리즘(270)이 x축을 중심으로 회전 운동을 할 때 발생하는 마찰력을 감소시킬 수 있다.
일 실시 예에 따르면, OIS 홀더(273) 및 프리즘 가이드(272)는 제1 OIS 볼 그룹(253)의 적어도 일부를 수용하기 위한 적어도 하나의 가이드 홈을 포함할 수 있다. 상기 가이드 홈을 따라 움직이는 제1 OIS 볼 그룹(253)에 의해 프리즘(270)은 y축을 중심으로 회전 운동을 할 수 있다.
일 실시 예에 따르면, 프리즘 가이드(272) 및 프리즘 캐리어(271)는 제2 OIS 볼 그룹(254)의 적어도 일부를 수용하기 위한 적어도 하나의 가이드 홈을 포함할 수 있다. 상기 가이드 홈을 따라 움직이는 제2 OIS 볼 그룹(254)에 의해 프리즘(270)은 x축을 중심으로 회전 운동을 할 수 있다.
일 실시 예에 따르면, 카메라 모듈(200)은 프리즘(270)에 의해 제1 광축(예: +z 방향)으로 반사된 광에 대해 AF 기능 및/또는 광학식 줌 기능을 수행하기 위한 구성을 포함할 수 있다. 일 실시 예에서, 카메라 모듈(200)은 하우징(260)에 고정된 제3 렌즈 어셈블리(213), 하우징(260)에 대해 +z 방향 및/또는 -z 방향으로 이동 가능하도록 제2 렌즈 캐리어(222)를 통해 설치된 제2 렌즈 어셈블리(212), 및 하우징(260)에 대해 +z 방향 및/또는 -z 방향으로 이동 가능하도록 제1 렌즈 캐리어(221)를 통해 설치된 제1 렌즈 어셈블리(211) 중 적어도 하나의 렌즈 어셈블리를 포함할 수 있다. 카메라 모듈(200)은 AF 기능 및/또는 광학식 줌 기능을 지원하기 위해 제1 렌즈 캐리어(221)에 고정된 제1 구동 마그넷(231), 하우징(260)에 고정된 제1 코일 그룹(241), 제1 렌즈 캐리어(221)와 하우징(260) 사이의 갭에 적어도 하나의 볼을 포함하는 제1 볼 그룹(251)을 포함할 수 있고, 제2 렌즈 캐리어(222)에 고정된 제2 구동 마그넷(232), 하우징(260)에 고정된 제2 코일 그룹(242), 제2 렌즈 캐리어(222)와 하우징(260) 사이의 갭에 적어도 하나의 볼을 포함하는 제2 볼 그룹(252)을 포함할 수 있다. 카메라 모듈(200)은 제1 렌즈 어셈블리(211)의 이동을 제어하기 위한 제1 PCB(261)와 제2 렌즈 어셈블리(212)의 이동을 제어하기 위한 제2 PCB(262)를 포함할 수 있다.
일 실시 예에 따르면, 제1 구동 마그넷(231)은 제1 렌즈 캐리어(221)의 -y 방향에 위치하는 면에 결합되고, 제1 코일 그룹(241)은 하우징(260) 중 제1 구동 마그넷(231)과 대면하는 일 면에 결합될 수 있다. 일 실시 예에 따르면, 제2 구동 마그넷(232)은 제2 렌즈 캐리어(222)의 +y 방향에 위치하는 면에 결합되고, 제2 코일 그룹(242)은 하우징(260) 중 제2 구동 마그넷(232)과 대면하는 일 면에 결합될 수 있다.
일 실시 예에 따르면, 제1 코일 그룹(241)은 적어도 2개의 코일을 포함할 수 있고, 제2 코일 그룹(242)은 적어도 2개의 코일을 포함할 수 있고, 카메라 모듈(200)은 제1 코일 그룹(241) 및 제2 코일 그룹(242)에 포함되는 각각의 코일과 전기적으로 연결되는 제어 회로를 포함할 수 있다. 상기 제어 회로는 카메라 모듈(200)의 AF 기능 및/또는 광학식 줌 기능을 구현하기 위해 제1 코일 그룹(241)에 포함된 코일들, 제2 코일 그룹(242)에 포함된 코일들 중 적어도 하나의 코일에 인가되는 전류를 제어할 수 있다. 예를 들면, 제어 회로는 제1 코일 그룹(241)에 포함된 코일들 중 적어도 하나의 코일에 인가되는 전류를 제어하여, 제1 렌즈 어셈블리(211)의 움직임(예: +z 방향 또는 -z 방향으로 이동)을 제어할 수 있다. 제1 코일 그룹(241)에 포함된 코일들 중 적어도 하나의 코일에 전류가 인가되는 경우, 전류가 인가된 코일과 제1 구동 마그넷(231)의 상호 작용을 통해 제1 렌즈 어셈블리(211)가 움직일 수 있다. 다른 예를 들면, 제어 회로는 제2 코일 그룹(241)에 포함된 코일들 중 적어도 하나의 코일에 인가되는 전류를 제어하여, 제2 렌즈 어셈블리(212)의 움직임(예: +z 방향 또는 -z 방향으로 이동)을 제어할 수 있다. 제2 코일 그룹(242)에 포함된 코일들 중 적어도 하나의 코일에 전류가 인가되는 경우, 전류가 인가된 코일과 제2 구동 마그넷(232)의 상호 작용을 통해 제2 렌즈 어셈블리(212)가 움직일 수 있다.
일 실시 예에 따르면, 제1 코일 그룹(241) 및 제2 코일 그룹(242)은 각각의 코일에 둘러싸인 적어도 하나의 홀 센서(hall sensor)를 포함할 수 있다. 예를 들면, 제1 코일 그룹(241)은 2개의 코일을 포함하고, 2개의 코일에 각각 둘러싸인 2개의 홀 센서를 포함할 수 있다. 일 실시 예에서, 각각의 홀 센서는 하우징(260)에 고정되어 구동 마그넷(예: 제1 구동 마그넷(231), 제2 구동 마그넷(232))의 위치를 감지할 수 있다. 제1 코일 그룹(241) 및 제2 코일 그룹(242)에 포함된 적어도 하나의 홀 센서와 전기적으로 연결된 제어 회로는, 제1 코일 그룹(241) 또는 제2 코일 그룹(242)에 포함된 적어도 하나의 코일과 적어도 하나의 홀 센서에 각각 전력을 제공할 수 있다. 제어 회로는 각각의 홀 센서를 통해 구동 마그넷(예: 제1 구동 마그넷(231), 제2 구동 마그넷(232))의 위치를 감지할 수 있다.
일 실시 예에 따르면, 카메라 모듈(200)은 적어도 하나의 자성체(예: 제1 OIS 마그넷(233), 제2 OIS 마그넷(234), 제3 OIS 마그넷(235), 제1 구동 마그넷(231), 또는 제2 구동 마그넷(232))의 이동(회전)(예: x축, y축, 및 z축 방향의 위치)을 확인하기 위한 다른 센서를 포함할 수 있다. 예를 들면, 카메라 모듈(200)은, TMR 센서(tunnel magneto-resistance sensor)를 포함할 수 있고, TMR 센서의 복수의 자성체들의 상대 각도에 기반하여 변하는 저항값을 이용하여, 자성체의 이동(회전)을 확인할 수 있다. 또한, 다른 실시 예에 따르면, 카메라 모듈(200)은 AMR(anisotropic magneto-resistance) 센서, 또는 GMR(giant magneto-resistance) 센서를 이용하여 자성체의 이동(회전)을 확인할 수 있다.
일 실시 예에 따르면, 상기 제어 회로는 제1 PCB(261) 또는 제2 PCB(262)에 배치될 수 있다. 예를 들면, 제1 코일 그룹(241)을 제어하는 제1 제어 회로는 제1 PCB(261)에 포함되고, 제2 코일 그룹(242)을 제어하는 제2 제어 회로는 제2 PCB(262)에 포함될 수 있다. 다른 예를 들면, 상기 제어 회로는 제1 PCB(261) 및 제2 PCB(262) 중 어느 하나에 배치되어 제1 코일 그룹(241)과 제2 코일 그룹(242)를 모두 제어할 수 있다. 예를 들면, 카메라 모듈(200)은, 제어 회로의 제어 하에, 적어도 하나의 코일을 통과하는 전류의 방향 및/또는 세기를 제어하여 전자기력을 제어할 수 있고, 전자기력(전자기 유도 방식)에 의한 로렌츠 힘을 이용하여 렌즈 어셈블리(예: 제1 렌즈 어셈블리(211), 제2 렌즈 어셈블리(212), 또는 제3 렌즈 어셈블리(213))를 이동할 수 있다.
일 실시 예에 따르면, 카메라 모듈(200)은 하우징(260)과 제1 렌즈 캐리어(221) 사이의 갭에 적어도 하나의 볼을 포함하는 제1 볼 그룹(251)을 포함할 수 있고, 하우징(260)과 제2 렌즈 캐리어(222) 사이의 갭에 적어도 하나의 볼을 포함하는 제2 볼 그룹(252)을 포함할 수 있다. 하우징(260)과 제1 렌즈 캐리어(221)는 제1 볼 그룹(251)의 적어도 일부를 수용하기 위해 제1 광축(예: -z 방향, 또는 +z 방향)을 따라 연장되는 적어도 하나의 가이드 홈을 포함할 수 있고, 하우징(260)과 제2 렌즈 캐리어(222)는 제2 볼 그룹(252)의 적어도 일부를 수용하기 위해 제1 광축(예: -z 방향, 또는 +z 방향)을 따라 연장되는 적어도 하나의 가이드 홈을 포함할 수 있다. 제1 볼 그룹(251)은 하우징(260)과 제1 렌즈 캐리어(221) 사이에서 각각 회전하면서 마찰력을 감소시켜 제1 렌즈 캐리어(221)의 z축 이동을 원활하게 할 수 있고, 제2 볼 그룹(252)은 하우징(260)과 제2 렌즈 캐리어(222) 사이에서 각각 회전하면서 마찰력을 감소시켜 제2 렌즈 캐리어(222)의 z축 이동을 원활하게 할 수 있다.
일 실시 예들에 따르면, 카메라 모듈(200)의 코일들(예: 제1 OIS 코일(243), 제2 OIS 코일(244), 제3 OIS 코일(245), 제1 코일 그룹(241), 또는 제2 코일 그룹(242)) 및 마그넷들(예: 제1 OIS 마그넷(233), 제2 OIS 마그넷(234), 제3 OIS 마그넷(235), 제1 구동 마그넷(231), 또는 제2 구동 마그넷(232))은 반드시 도면에 도시된 배치로 한정되지 않는다. 다양한 실시 예에서, 제1 OIS 코일(243)와 제2 OIS 코일(244)(및/또는 제3 OIS 코일(245))이 서로 마주보게 배치될 수 있다. 예를 들어, 제1 OIS 코일(243) 및 제2 OIS 코일(244)(및/또는 제3 OIS 코일(245)) 중 어느 하나는 대응되는 마그넷과 솔레노이드 타입으로 구동되고, 다른 하나는 로렌츠 타입으로 구동되도록 구성될 수 있다. 예를 들면, 제1 OIS 코일(243)과 제2 OIS 코일(244)(및/또는 제3 OIS 코일(245))은 서로 마주보도록 배치되어, 렌즈 캐리어(예: 제1 렌즈 캐리어(221), 제2 렌즈 캐리어(222), 또는 프리즘 캐리어(271))를 서로 실질적으로 수직한 두 개의 방향으로 구동시킬 수 있다.
일 실시 예에 따르면, 카메라 모듈(200)은 이미지 센서(280)를 포함할 수 있다. 카메라 홀(201)을 통해 제2 광축(예: -x 방향)을 따라 입사되어 프리즘(270)에 의해 제1 광축(예: +z 방향)을 따라 제3 렌즈 어셈블리(213), 제2 렌즈 어셈블리(212), 제1 렌즈 어셈블리(211)를 통과한 광 신호는, 이미지 센서(280)에 의해 전기적 신호로 변환될 수 있다. 이미지 센서(280)와 연결된 적어도 하나의 프로세서(예: ISP(image signal processor), AP(application processor))는 이미지 센서(280)를 통해 상기 광 신호에 대응하는 이미지 데이터를 획득할 수 있다. 일 실시 예에서, 제어 회로는 상기 적어도 하나의 프로세서를 포함하는 개념으로 이해될 수 있다.
일 실시 예에 따르면, 전자 장치(100)는 프로세서(미도시)를 포함할 수 있다. 프로세서는 ISP(image signal processor), AP(application processor) 중 적어도 하나의 프로세서를 포함할 수 있다. 프로세서는 상기 카메라 모듈(200)에 포함된 제어 회로와 전기적으로 연결될 수 있다. 상기 제어 회로는 이미지 센서(280)를 통해 획득한 이미지 데이터를 상기 프로세서에 제공할 수 있다. 프로세서는 제어 회로를 통해 제1 렌즈 어셈블리(211), 제2 렌즈 어셈블리(212) 중 적어도 하나의 렌즈 어셈블리의 이동을 제어할 수 있고, 광학식 줌 기능을 구현할 수 있다. 다른 예시로, 이미지 센서(280)를 통해 이미지 데이터를 획득하는 프로세서와, 렌즈를 제어하는 제어 회로는 별개의 하드웨어로 구현될 수도 있다.
일 실시 예에 따르면, 전자 장치(100)는 광학식 줌 기능과 디지털 줌 기능을 결합하여 이미지 데이터를 처리할 수 있다. 예를 들면, 전자 장치(100)는 광학식 줌 1.08배와 디지털 줌 및 크롭(crop)을 결합하여 3배 줌을 제공하거나, 광학식 줌 4배와 디지털 줌 및 크롭을 결합하여 10배 줌을 제공할 수 있다.
일 실시 예에서, 이미지 시그널 프로세서(ISP)(예: 도 11의 이미지 시그널 프로세서(1160))는 카메라 모듈(200)로부터 획득되는 이미지들에 대한 안정화 작업을 수행할 수 있다. 일 실시 예에서, 안정화 작업은 자동 노출(AE; auto exposure), 자동 초점(AF; auto focus), 및 자동 화이트 밸런스(AWB; auto white balance) 중 적어도 하나를 포함할 수 있다. 다른 실시 예에서, 이미지 시그널 프로세서(ISP)는 화질 조절(예: 해상도)/튜닝 작업을 통해 카메라 모듈(200)로부터 획득된 이미지의 품질을 개선할 수 있다.
도 5는 일 실시 예에 따른 렌즈 어셈블리(510), 구동 마그넷(530), 및 코일(541, 542)의 배치를 도시한다. 도 5에 도시된 구성은 도 1 내지 도 4에서 도시된 카메라 모듈(200)의 일부 구성으로 이해될 수 있다.
일 실시 예에 따르면, 카메라 모듈(200)은 제1 광축(501)을 따라 배열되는 렌즈 어셈블리(510), 상기 렌즈 어셈블리(510)에 결합되고 제1 광축(501)을 따라 교대로 배치되는 N극 및 S극을 적어도 2회 포함하는 구동 마그넷(530), 구동 마그넷(530)과 대면하고 제1 광축(501)을 따라 나란히 배치되는 제1 코일(541) 및 제2 코일(542)을 포함할 수 있다. 일 실시 예에서, 카메라 모듈(200)은 제1 코일(541)에 둘러싸인 제1 홀 센서(551), 제2 코일(542)에 둘러싸인 제2 홀 센서(552)를 포함할 수 있다. 일 실시 예에서, 카메라 모듈(200)은 렌즈 어셈블리(510) 및 구동 마그넷(530)과 결합되어 일체로 움직일 수 있는 렌즈 캐리어(520)를 포함할 수 있다.
일 실시 예에 따르면, 렌즈 어셈블리(510)는 도 4에서 도시된 제1 렌즈 어셈블리(211) 또는 제2 렌즈 어셈블리(212)로 이해될 수 있다. 렌즈 캐리어(520)는 도 4에서 도시된 제1 렌즈 캐리어(221) 또는 제2 렌즈 캐리어(222)로 이해될 수 있다. 구동 마그넷(530)은 도 4에서 도시된 제1 구동 마그넷(231) 또는 제2 구동 마그넷(232)으로 이해될 수 있다. 제1 코일(541), 제2 코일(542), 제1 홀 센서(551), 및 제2 홀 센서(552)는 제1 코일 그룹(241)에 포함되는 것으로 이해되거나, 제2 코일 그룹(242)에 포함되는 것으로 이해될 수 있다.
일 실시 예에 따르면, 렌즈 어셈블리(510)는 적어도 하나의 렌즈를 포함하고, 적어도 하나의 렌즈는 제1 광축(501)을 따라 배열될 수 있다. 일 실시 예에서, 제1 광축(501)은 z축으로 이해될 수 있다.
일 실시 예에 따르면, 렌즈 캐리어(520)는 렌즈 어셈블리(510)를 수용할 수 있고, 렌즈 어셈블리(510)는 렌즈 캐리어(520)를 통해 하우징(260)에 설치될 수 있다. 렌즈 어셈블리(510)는 렌즈 캐리어(520)에 결합되어 렌즈 캐리어(520)와 일체로 움직일 수 있다. 렌즈 어셈블리(510)를 수용하는 렌즈 캐리어(520)는 하우징(260)에 대해 제1 광축(501)(예: +z 방향 또는 -z 방향)을 따라 이동할 수 있다. 일 실시 예에서, 렌즈 어셈블리(510)와 렌즈 캐리어(520)는 일체로 형성될 수 있다.
일 실시 예에 따르면, 구동 마그넷(530)은 렌즈 캐리어(520)에 고정되어 렌즈 어셈블리(510)와 일체로 이동할 수 있다. 예를 들면, 구동 마그넷(530)은 렌즈 어셈블리(510)를 수용하는 렌즈 캐리어(520)의 일 면(예: +y 방향 또는 -y 방향)에 배치될 수 있다. 일 실시 예에서, 렌즈 캐리어(520)와 구동 마그넷(530)의 사이에 요크(yoke)가 더 포함될 수 있다. 예를 들면, 요크는 마그넷(예: 제1 OIS 마그넷(233), 제2 OIS 마그넷(234), 제3 OIS 마그넷(235), 제1 구동 마그넷(231), 또는 제2 구동 마그넷(232))에 의한 자기장이 카메라 모듈(200)의 내부에 배치된 전기 소자들(예: 도 4의 제1 PCB(261), 제2 PCB(262), 또는 이미지 센서(280))에 영향을 주지 않도록 자기장을 차폐할 수 있다.
일 실시 예에 따르면, 구동 마그넷(530)은 제1 광축(501)(예: z축)을 따라 N극 및 S극이 적어도 2회 교대로 배치된 마그넷일 수 있다. 일 실시 예에서, 구동 마그넷(530)은 제1 광축(501)을 따라 N극 및 S극이 적어도 2회 교대로 배치되는 하나의 마그넷으로 구성될 수 있다. 다른 실시 예에서, 구동 마그넷(530)은 N극과 S극이 1회 배치된 마그넷을 2개 이상 연달아 배치한 마그넷 그룹일 수 있다. 다른 실시 예에서, 구동 마그넷(530)은 N극과 S극이 1회 배치된 마그넷이 일정 거리 이상 떨어진 위치에 배치된 마그넷 그룹일 수 있다. 일 실시 예에서, 구동 마그넷(530)은 제1 광축을 따라 N극 및 S극이 3회 이상 교대로 배치된 마그넷일 수 있다.
일 실시 예에 따르면, 제1 코일(541)과 제2 코일(542)은 하우징(260)에 고정될 수 있고, 구동 마그넷(530)과 대면하게 배치될 수 있으며, 제1 광축(501)을 따라 나란히 배치될 수 있다. 예를 들면, 구동 마그넷(530)이 렌즈 어셈블리(510)의 -y 방향에 위치하는 경우, 제1 코일(541)과 제2 코일(542)은 구동 마그넷(530)의 -y 방향에서 구동 마그넷(530)을 대면하게 배치될 수 있다. 다른 예를 들면, 구동 마그넷(530)이 렌즈 어셈블리(510)의 +y 방향에 위치하는 경우, 제1 코일(541)과 제2 코일(542)은 구동 마그넷(530)의 +y 방향에서 구동 마그넷(530)을 대면하게 배치될 수 있다. 일 실시 예에서, 카메라 모듈(200)은 제1 코일(541) 및 제2 코일(542)과 제1 광축(501)을 따라 나란히 배치된 제3 코일(미도시), 제4 코일(미도시)을 더 포함할 수도 있다.
일 실시 예에 따르면, 제1 코일(541)과 제2 코일(542)은 밀착하게 배치될 수 있다. 예를 들면, 구동 마그넷(530)의 N극 사이의 거리는 제1 코일(541)의 중심과 제2 코일(542)의 중심에 대해 4/3의 비율을 가질 수 있다. 다른 실시 예에서, 제1 코일(541)과 제2 코일(542)은 일정 거리를 가지고 떨어진 형태로 배치될 수 있다. 예를 들면, 구동 마그넷(530)의 N극 사이의 거리는 제1 코일(541)의 중심과 제2 코일(542)의 중심에 대해 4/7 또는 4/11의 비율을 가질 수 있다. 자세한 내용은 도 8을 참조하여 후술한다.
일 실시 예에 따르면, 제1 코일(541) 및/또는 제2 코일(542) 각각의 코일 권선 폭 및 코일 내측 홀의 폭은 1:1로 동일할 수 있다. 다른 실시 예에서, 제1 코일(541) 및/또는 제2 코일(542) 각각의 코일 권선 폭 및 코일 내측 홀의 폭은 동일하지 않을 수 있다. 자세한 내용은 도 8을 참조하여 후술한다.
일 실시 예에 따르면, 카메라 모듈(200)은 제1 코일(541) 및 제2 코일(542)와 전기적으로 연결된 제어 회로를 포함할 수 있다. 제어 회로는 제1 코일(541)에 인가되는 제1 전류 및 제2 코일(542)에 인가되는 제2 전류를 제어하여, 렌즈 어셈블리(510)가 제1 코일(541), 제2 코일(542)에 대해 제1 광축(501) 방향으로 이동하도록 제어할 수 있다. 예를 들면, 제어 회로는 제1 전류 및 제2 전류를 제어하여 렌즈 어셈블리(510) 및 구동 마그넷(530)과 결합된 렌즈 캐리어(520)를 하우징(260)에 대해 +z 방향 또는 -z 방향으로 이동하도록 제어할 수 있다.
일 실시 예에 따르면, 제1 홀 센서(551)는 제1 코일(541)에 둘러싸인 상태로 하우징(260)에 고정될 수 있고, 제2 홀 센서(552)는 제2 코일(542)에 둘러싸인 상태로 하우징(260)에 고정될 수 있다. 제어 회로는 제1 홀 센서(551) 및 제2 홀 센서(552)와 전기적으로 연결될 수 있고, 제어 회로는 제1 홀 센서(551)와 제2 홀 센서(552)를 통해 구동 마그넷(530)의 위치를 감지할 수 있다. 제어 회로는 구동 마그넷(530)의 위치 값을 통해 렌즈 어셈블리(510)가 원하는 위치로 이동하였는지 여부를 판단할 수 있다. 예를 들면, 제어 회로는 렌즈 어셈블리(510)가 특정한 위치로 이동해야 한다고 판단한 경우, 제1 코일(541)에 인가되는 제1 전류를 제어할 수 있고, 제1 코일(541)과 구동 마그넷(530)의 상호 작용을 통해 렌즈 어셈블리(510)의 이동을 제어할 수 있다. 제어 회로는 제1 홀 센서(551)를 통해 구동 마그넷(530)의 위치 값을 획득할 수 있고, 렌즈 어셈블리(510)가 이동해야 하는 특정한 위치로 이동했는지 여부를 판단할 수 있다. 제어 회로는 렌즈 어셈블리(510)가 해당 위치로 이동하지 않은 경우, 제1 코일(541)에 인가되는 제1 전류를 적절한 값으로 다시 제어할 수 있다.
도 2 내지 도 5를 참조하면, 제1 코일(541) 및 제2 코일(542)은 제1 광축(501)을 따라 z축 방향으로 나란하게 배열될 수 있다. 제1 코일(541) 및 제2 코일(542)이 z축 방향으로 나란하게 배열되는 경우(예: 제1 코일(541)과 제2 코일(542)의 y축 방향의 위치, 및 x축 방향의 위치가 동일한 경우)는 그렇지 않은 경우와 비교할 때, 카메라 모듈(200)의 x축 방향의 길이를 감소시킬 수 있다. 제1 코일(541)과 제2 코일(542)가 z축 방향을 따라 나란하게 배치될 때 전자 장치(100)의 x축 방향의 길이(예: 전자 장치(100)의 두께) 또한 감소할 수 있다.
일 실시 예에 따르면, 본 개시의 카메라 모듈(200)은 기존에 AF 기능을 구현하기 위해 이용된 액추에이터에 포함되는 구성 및 부품들을 이용할 수 있다. 따라서 AF 기능을 위해 이용되는 정도의 제어 정밀도는 유지하면서도 추가로 필요한 비용은 최소화할 수 있다.
도 6은 일 실시 예에 따른, 제1 코일(541) 또는 제2 코일(542)의 제어에 따른 구동 마그넷(530)의 이동을 도시한다.
도 6은, 도 5에서 렌즈 어셈블리(510), 렌즈 캐리어(520), 제1 홀 센서(551), 및 제2 홀 센서(552)의 도시를 생략하고, 제1 코일(541), 및 제2 코일(542)에 대한 구동 마그넷(530)의 이동을 개략적으로 도시한다. 일 실시 예에서, 구동 마그넷(530)은 N극 및 S극이 4회 교대로 배치되는 마그넷일 수 있다. 일 실시 예에서, 제1 코일(541) 및 제2 코일(542)은 하우징(260)에 고정되어 있으므로, 제어 회로가 제1 코일(541)에 인가되는 제1 전류 및 제2 코일(542)에 인가되는 제2 전류를 제어함에 따라 구동 마그넷(530)이 제1 광축(예: +z 방향 또는 -z 방향)을 따라서 이동할 수 있다. 구동 마그넷(530)은 렌즈 어셈블리(510)와 결합되어 있으므로, 제어 회로는 구동 마그넷(530)의 이동을 통해 렌즈 어셈블리(510)의 이동을 제어할 수 있고, 렌즈 어셈블리(510)의 이동을 통해 카메라 모듈(200)의 AF 기능 및/또는 광학식 줌 기능을 구현할 수 있다.
일 실시 예에 따르면, 참조번호 610의 위치에서, 제어 회로는 제1 코일(541)에 인가되는 제1 전류는 OFF, 제2 코일(542)에는 인가되는 제2 전류는 ON이 되도록 제어할 수 있다. 예를 들면, 제2 코일(542)에 인가되는 제2 전류는 시계 방향의 전류일 수 있다. 구동 마그넷(530)의 자기장은 제2 코일(542)에 인가되는 제2 전류에 의한 전기장과 상호 작용할 수 있고, 구동 마그넷(530)은 -z 방향으로 일정 거리 이동할 수 있다. 예를 들면, 구동 마그넷(530)은 -z 방향으로 1mm 이동할 수 있다.
일 실시 예에 따르면, 참조번호 620의 위치에서, 제어 회로는 제1 코일(541)에 인가되는 제1 전류는 ON, 제2 코일(542)에는 인가되는 제2 전류는 OFF가 되도록 제어할 수 있다. 예를 들면, 제1 코일(541)에 인가되는 제1 전류는 시계 방향의 전류일 수 있다. 구동 마그넷(530)의 자기장은 제1 코일(541)에 인가되는 제1 전류에 의한 전기장과 상호 작용할 수 있고, 구동 마그넷(530)은 -z 방향으로 일정 거리 이동할 수 있다. 예를 들면, 구동 마그넷(530)은 -z 방향으로 1mm 이동할 수 있다.
일 실시 예에 따르면, 참조번호 630의 위치에서, 제어 회로는 제1 코일(541)에 인가되는 제1 전류는 OFF, 제2 코일(542)에는 인가되는 제2 전류는 ON이 되도록 제어할 수 있다. 예를 들면, 제2 코일(542)에 인가되는 제2 전류는 반시계 방향의 전류일 수 있다. 구동 마그넷(530)의 자기장은 제2 코일(542)에 인가되는 제2 전류에 의한 전기장과 상호 작용할 수 있고, 구동 마그넷(530)은 -z 방향으로 일정 거리 이동할 수 있다. 예를 들면, 구동 마그넷(530)은 -z 방향으로 1mm 이동할 수 있다.
일 실시 예에 따르면, 참조번호 640의 위치에서, 제어 회로는 제1 코일(541)에 인가되는 제1 전류는 ON, 제2 코일(542)에는 인가되는 제2 전류는 OFF가 되도록 제어할 수 있다. 예를 들면, 제1 코일(541)에 인가되는 제1 전류는 반시계 방향의 전류일 수 있다. 구동 마그넷(530)의 자기장은 제1 코일(541)에 인가되는 제1 전류에 의한 전기장과 상호 작용할 수 있고, 구동 마그넷(530)은 -z 방향으로 일정 거리 이동할 수 있다. 예를 들면, 구동 마그넷(530)은 -z 방향으로 1mm 이동할 수 있다.
일 실시 예에 따르면, 참조번호 650의 위치에서, 제어 회로는 참조번호 610의 경우와 동일하게 동작할 수 있다. 참조번호 610 내지 참조번호 640과 관련하여 설명된 동작은 참조번호 690의 위치에 도달할 때까지 반복될 수 있다.
일 실시 예에 따르면, 참조번호 690의 위치에서, 제어 회로는 참조번호 630과 관련하여 설명된 동작을 수행할 수 있다. 제2 코일(542)에 인가되는 반시계 방향의 제2 전류를 통해 구동 마그넷(530)을 -z 방향으로 일정 거리 이동시킬 수 있다. 일 실시 예에서, 참조번호 690의 위치에서 -z 방향으로 일정 거리 더 이동하도록 제2 전류를 제어한 경우, 구동 마그넷(530)은 더 이상 -z 방향으로 이동하지 못할 수 있다. 제어 회로는 구동 마그넷(530)을 +z 방향으로 이동하기 위해 참조번호 610 내지 참조번호 640과 관련하여 설명된 내용 중 제1 코일(541)에 인가한 제1 전류 또는 제2 코일(542)에 인가한 제2 전류와 반대 방향의 전류를 각각의 코일에 인가할 수 있고, 구동 마그넷(530)을 +z 방향으로 이동하도록 제어할 수 있다.
일 실시 예에 따르면, 제어 회로는 제1 코일(541)에 인가되는 제1 전류와 제2 코일(542)에 인가되는 제2 전류를 교대로 ON/OFF할 수 있다. 다른 실시 예에 따르면, 제어 회로는 제1 전류와 제2 전류를 ON/OFF하지 않고, 제1 전류와 제2 전류의 세기를 교대로 강/약으로 조절할 수 있다.
일 실시 예에 따르면, 도 6과 관련하여 설명된 내용을 참조하면, 카메라 모듈(200)은 약 10mm 이상의 긴 스트로크(stroke)를 가질 수 있다. 상기 카메라 모듈(200)을 포함하는 전자 장치(100)는 광학식 줌 기능을 통한 이미지를 획득할 수 있다. 광학식 줌 이미지는 디지털 줌 이미지와 비교할 때 연속적인 초점 거리를 가질 수 있고, 해상도가 감소하지 않을 수 있다.
도 7은 일 실시 예에 따라 제1 홀 센서(551)와 제2 홀 센서(552)의 검출 신호 값을 도시하는 그래프이다.
일 실시 예에 따르면, 제어 회로는 제1 홀 센서(551)와 제2 홀 센서(552)를 통해 구동 마그넷(530)의 위치를 감지할 수 있다. 일 실시 예에서, 제어 회로는 제1 홀 센서(551)와 제2 홀 센서(552)의 결과 값을 교대로 이용하여 렌즈 어셈블리(510)의 이동을 제어할 수 있다. 예를 들면, 제어 회로는 제1 홀 센서(551)의 검출 신호 값 또는 제2 홀 센서(552)의 검출 신호 값을 통해 구동 마그넷(530)의 위치 값을 획득할 수 있고, 제2 홀 센서(552)의 검출 신호 값 또는 제1 홀 센서(551)의 검출 신호 값을 교대로 이용하기 위해 제어를 전환할 수 있다.
일 실시 예에 따르면, 참조번호 710의 위치부터 참조번호 720의 위치까지는 제2 홀 센서(552)의 검출 신호 값이 직선에 가깝게 나타나고, 참조 번호 720의 위치부터 참조번호 730의 위치까지는 제1 홀 센서(551)의 검출 신호가 직선에 가깝게 나타난다.
일 실시 예에 따르면, 홀 센서의 검출 신호 값이 직선에 가깝게 나타날수록 홀 센서의 검출 신호 값과 구동 마그넷(530)의 위치 값이 선형으로(linearly) 변화할 수 있다. 홀 센서의 검출 신호 값과 구동 마그넷(530)의 위치 값이 비례하게 변화할수록 제어 회로가 구동 마그넷(530)의 이동을 제어하기에 용이할 수 있다. 따라서, 제어 회로는 참조번호 710 내지 720의 위치에서는 제2 홀 센서(552)의 검출 신호 값을 이용하여 구동 마그넷(530)의 위치 값을 계산하고, 참조번호 720 내지 참조번호 730의 위치에서는 제1 홀 센서(551)의 검출 신호 값을 이용하여 구동 마그넷(530)의 위치 값을 계산할 수 있다. 제어 회로는 참조번호 710 내지 720의 위치와 참조번호 720 내지 730의 위치에서 서로 다른 홀 센서의 검출 신호 값을 이용하도록 제어를 전환할 수 있다. 제어 회로는 제1 홀 센서(551)의 전원을 켤 때 제2 홀 센서(552)의 전원은 끄고, 제2 홀 센서(552)의 전원을 켤 때 제1 홀 센서(551)의 전원은 끌 수 있다. 제어 회로는 제1 홀 센서(551)와 제2 홀 센서(552)의 결과 값을 교대로 이용하여 렌즈 어셈블리(510)의 위치를 감지할 수 있다.
일 실시 예에 따르면, 참조번호 710의 위치는 도 6에서 도시된 참조번호 610의 위치에 대응할 수 있다. 참조번호 720은 도 6의 620, 참조번호 730은 도 6의 630, 참조번호 740은 도 6의 640, 참조번호 750은 도 6의 650, 참조번호 790은 도 6의 690의 위치에 대응할 수 있다.
일 실시 예에 따르면, 제어 회로는 도 6에서 도시된 참조번호 610 내지 참조번호 620의 위치에서는 제2 코일(542)에 인가되는 제2 전류를 제어하여 구동 마그넷(530)의 이동을 제어할 수 있고, 도 6의 참조번호 610 내지 620의 위치에 대응하는 참조번호 710 내지 720의 위치에서 제2 홀 센서(552)의 검출 신호 값을 이용하여 구동 마그넷(530)의 위치 값을 계산할 수 있다. 이는 참조번호 720 내지 790의 경우에도 적용될 수 있다. 일 실시 예에서, 제어 회로는 홀 센서의 검출 신호 값이 직선에 가깝게 나타나는 홀 센서를 교대로 이용하여 구동 마그넷(530)의 위치 값을 계산할 수 있다.
일 실시 예에 따르면, 전자 장치(100)에 포함된 프로세서는 이미지 센서(280)를 통해 획득한 이미지 데이터를 획득하고, 이미지 데이터를 분석하여 렌즈 어셈블리(510)의 위치를 특정 위치로 이동시킬 필요가 있다고 판단할 수 있다. 다른 실시 예에서, 전자 장치(100)의 사용자 입력에 따라 프로세서는 렌즈 어셈블리(510)의 이동이 필요하다고 판단할 수 있다. 프로세서는 렌즈 어셈블리(510)의 이동이 필요하다고 판단한 경우, 카메라 모듈(200)에 포함된 제어 회로에 렌즈 어셈블리(510)를 이동시키라는 신호를 제공할 수 있다. 제어 회로는 렌즈 어셈블리(510)를 특정 위치로 이동시키기 위해 제1 코일(541)에 인가되는 제1 전류와 제2 코일(542)에 인가되는 제2 전류를 제어하여 렌즈 어셈블리(510)의 이동을 제어할 수 있다. 일 실시 예에서, 제어 회로는 제1 홀 센서(551)의 결과 값과 제2 홀 센서(552)의 결과 값을 교대로 이용하여 구동 마그넷(530)의 위치 값을 계산할 수 있다. 제어 회로는 구동 마그넷(530)의 위치 값을 통해 렌즈 어셈블리(510)가 특정 위치로 이동했는지 여부를 판단할 수 있다. 일 실시 예에서, 제어 회로는 렌즈 어셈블리(510)가 특정 위치로 이동하지 않았다고 판단한 경우에 제1 전류와 제2 전류를 새롭게 제어할 수 있다. 제어 회로는 제1 전류와 제2 전류를 제어하여 렌즈 어셈블리(510)의 이동을 제어할 수 있고, 렌즈 어셈블리(510)를 특정 위치로 이동시킬 수 있다.
도 8은 일 실시 예에 따른 제1 코일(541)과 제2 코일(542)의 형태를 도시한다.
일 실시 예에 따르면, 구동 마그넷(530)의 N극 또는 S극의 길이는 d, 두 N극의 중심 사이의 거리는 2d일 수 있다.
일 실시 예에 따르면, 제1 코일(541)의 중심과 제2 코일(542)의 중심 사이의 거리는 (3/2)d일 수 있다. 구동 마그넷(530)의 N극 사이의 거리는 제1 코일(541)의 중심과 제2 코일(542)의 중심에 대해 4/3의 비율을 가질 수 있다. 구동 마그넷(530)의 N극 사이의 거리가 제1 코일(541)의 중심과 제2 코일(542)의 중심에 대해 4/3의 비율을 가지는 경우, 카메라 모듈(200)은 도 6 내지 도 7과 관련하여 설명된 동작들을 연속적으로 수행할 수 있다.
일 실시 예에 따르면, 제1 코일(541)의 중심과 제2 코일(542)의 중심 사이의 거리는 (7/2)d일 수 있다. 구동 마그넷(530)의 N극 사이의 거리는 제1 코일(541)의 중심과 제2 코일(542)의 중심에 대해 4/7의 비율을 가질 수 있다. 일 실시 예에서, 구동 마그넷(530)의 N극 사이의 거리와 제1 코일(541)의 중심과 제2 코일(542)의 중심 간의 비율은 카메라 모듈(200)이 도 6 내지 도 7과 관련하여 설명된 동작들을 연속적으로 수행할 수 있는 모든 위치를 포함한다. 예를 들면, 구동 마그넷(530)의 N극 사이의 거리와 제1 코일(541)의 중심과 제2 코일(542)의 중심 간의 비율은 4/3, 4/7, 4/11, 4/15일 수 있다.
일 실시 예에 따르면, 제1 코일(541) 및 제2 코일(542) 각각의 코일 권선 폭 및 코일 내측 홀의 폭은 l일 수 있다. 제1 코일(541) 및 제2 코일(542) 각각의 코일 권선 폭 및 코일 내측 홀의 폭은 1:1일 수 있다. 이 경우, l은 (1/2)d에 해당할 수 있다.
일 실시 예에서, 구동 마그넷(530)의 N극 사이의 거리는 제1 코일(541) 및 제2 코일(542) 각각의 코일 권선 폭 및 코일 내측 홀의 폭에 대해 각각 4/1의 비율을 가질 수 있다. 구동 마그넷(530)의 N극 또는 S극의 길이 d는 제1 코일(541) 및 제2 코일(542) 각각의 코일 권선 폭 및 코일 내측 홀의 폭인 l의 2배일 수 있다. 제어 회로가 제1 전류 및 제2 전류를 제어함에 따라 구동 마그넷(530)의 이동을 제어하는 구동력은, 상기 d가 상기 l의 2배일 때 최대일 수 있다.
일 실시 예에 따르면, 제1 코일(541) 및 제2 코일(542) 각각의 코일 권선 폭은 n이고, 제1 코일(541) 및 제2 코일(542) 각각의 코일 내측 홀의 폭은 m일 수 있다. 제1 코일(541) 및 제2 코일(542) 각각의 코일 권선 폭과 각각의 코일 내측 홀의 폭은 1:1이 아닐 수 있다. 제1 코일(541) 및 제2 코일(542)은, 각각의 코일 권선 폭의 중심 간 거리(예: m+n)가 구동 마그넷(530)의 N극 또는 S극의 길이(예: d)와 일치하는 코일일 수 있다. 각각의 코일의 코일 권선 폭의 중심과 구동 마그넷(530)의 각각의 극 중심이 만나는 지점에서 구동력이 최대가 되므로, m+n과 d가 일치하는 모든 코일이 가능할 수 있다. 예를 들면, 제1 코일(541) 및 제2 코일(542)은 각각의 코일 권선 폭 및 코일 내측 홀의 폭이 1:1이 아니더라도, 각각의 코일 권선 폭이 더 얇은 코일일 수도 있고, 각각의 코일 권선 폭이 더 두꺼운 코일일 수도 있다. 일 실시 예에서, 제1 코일(541)과 제2 코일(542)은 형태가 서로 동일한 코일일 수 있고, 다른 실시 예에서, 제1 코일(541)과 제2 코일(542)은 형태가 서로 다른 코일일 수 있다.
도 9는 일 실시 예에 따라 센싱 마그넷(930)을 포함하는 카메라 모듈(200)의 일부를 도시한다.
일 실시 예에 따르면, 카메라 모듈(200)은 제1 광축(501)을 따라 체적이 변화하는 센싱 마그넷(930)을 포함할 수 있다. 일 실시 예에서, 도 5에서 도시된 제1 광축(501)은 도 9에서 도시된 z축으로 이해될 수 있다. 예를 들면, 카메라 모듈(200)은 z축을 따라 체적이 변화하는 센싱 마그넷(930)을 포함할 수 있다. 예를 들면, 센싱 마그넷(930)은 z축 방향의 위치에 따라서 y축 방향의 길이가 변화할 수 있다. 일 실시 예에서, 센싱 마그넷(930)은 구동 마그넷(530)과 함께 렌즈 어셈블리(510)에 결합될 수 있고, 렌즈 어셈블리(510)와 일체로 이동할 수 있다. 예를 들면, 센싱 마그넷(930)은 렌즈 어셈블리(510)와 함께 +z 방향 또는 -z 방향으로 이동할 수 있다.
일 실시 예에 따르면, 카메라 모듈(200)은 센싱 마그넷(930)과 대면하는 제3 홀 센서(953)를 포함할 수 있다. 제3 홀 센서(953)는 제1 홀 센서(551), 제2 홀 센서(552)와 함께 하우징(260)에 고정될 수 있다.
일 실시 예에 따르면, 센싱 마그넷(930)의 체적이 제1 광축(501)을 따라 변화하므로, 센싱 마그넷(930)이 +z 방향 또는 -z 방향으로 이동함에 따라 제3 홀 센서(953)가 검출할 수 있는 센싱 마그넷(930)의 자기장 세기가 변화할 수 있다. 제3 홀 센서(953)의 검출 신호 값은, 렌즈 어셈블리(510)의 이동에 따라 변화할 수 있다. 제어 회로는 제3 홀 센서(953)를 통해 센싱 마그넷(930)의 위치를 감지할 수 있다. 카메라 모듈(200)은 제3 홀 센서(953)의 검출 신호 값을 통해 렌즈 어셈블리(510)의 위치 값을 획득할 수 있다.
일 실시 예에 따르면, 구동 마그넷(530), 제1 코일(541), 제2 코일(542), 제1 홀 센서(551), 및 제2 홀 센서(552)를 통해 렌즈 어셈블리(510)의 이동을 제어하는 카메라 모듈(200)의 경우, 제1 홀 센서(551) 및 제2 홀 센서(552)의 검출 신호 값만을 통해서는 구동 마그넷(530)의 정확한 위치를 파악하기 어려울 수 있다. 예를 들면, 도 6의 참조번호 610의 위치와 참조번호 650의 위치에서 제1 홀 센서(551)와 제2 홀 센서(552)의 검출 신호 값은 동일할 수 있다. 도 7에서 참조번호 710과 참조번호 750에서 제1 홀 센서(551)와 제2 홀 센서(552)의 검출 신호 값은 실질적으로 동일할 수 있다. 상기 설명된 문제를 해결하기 위해서는 카메라 모듈(200)을 이용한 촬영 동작의 초기에 구동 마그넷(530)의 위치를 초기화하는 동작이 추가될 수 있다. 일 실시 예에서, 구동 마그넷(530), 제1 코일(541), 제2 코일(542), 제1 홀 센서(551), 제2 홀 센서(552)과 함께 센싱 마그넷(930)과 제3 홀 센서(953)를 더 포함하는 카메라 모듈(200)의 경우에는, 구동 마그넷(530)의 위치를 초기화하는 동작이 생략될 수 있다. 예를 들면, 제어 회로는 제3 홀 센서(953)의 검출 신호 값을 통해 센싱 마그넷(930)의 위치 값을 획득할 수 있고, 제1 홀 센서(551) 또는 제2 홀 센서(552)의 검출 신호 값을 통해 구동 마그넷(530)의 정확한 위치 값을 파악할 수 있다. 예를 들면, 제어 회로는 제3 홀 센서(953)의 검출 신호 값과 제1 홀 센서(551), 제2 홀 센서(552)의 검출 신호 값을 함께 이용하여 렌즈 어셈블리(510)의 위치를 정확하게 감지할 수 있다.
일 실시 예에 따르면, 제어 회로는 렌즈 어셈블리(510)를 특정 위치로 이동시키기 위해 제1 코일(541)에 인가되는 제1 전류 및 제2 코일(542)에 인가되는 제2 전류를 제어하여, 렌즈 어셈블리(510)가 제1 광축(501)을 따라 특정 위치로 이동하도록 제어할 수 있고, 제1 홀 센서(551), 제2 홀 센서(552), 및 제3 홀 센서(953)의 검출 신호 값을 통해 렌즈 어셈블리(510)가 특정 위치로 이동되었는지 판단할 수 있다. 제어 회로는 렌즈 어셈블리(510)가 특정 위치로 이동하지 않았다고 판단한 경우, 제1 전류 및 제2 전류를 제어하여 렌즈 어셈블리(510)가 특정 위치로 이동하도록 제어할 수 있다.
도 10은, 다양한 실시 예들에 따른, 네트워크 환경(1000) 내의 전자 장치(1001)의 블록도이다. 도 10을 참조하면, 네트워크 환경(1000)에서 전자 장치(1001)는 제1 네트워크(1098)(예: 근거리 무선 통신 네트워크)를 통하여 전자 장치(1002)와 통신하거나, 또는 제2 네트워크(1099)(예: 원거리 무선 통신 네트워크)를 통하여 전자 장치(1004) 또는 서버(1008)와 통신할 수 있다. 일 실시 예에 따르면, 전자 장치(1001)는 서버(1008)를 통하여 전자 장치(1004)와 통신할 수 있다. 일 실시 예에 따르면, 전자 장치(1001)는 프로세서(1020), 메모리(1030), 입력 모듈(1050), 음향 출력 모듈(1055), 디스플레이 모듈(1060), 오디오 모듈(1070), 센서 모듈(1076), 인터페이스(1077), 연결 단자(1078), 햅틱 모듈(1079), 카메라 모듈(1080), 전력 관리 모듈(1088), 배터리(1089), 통신 모듈(1090), 가입자 식별 모듈(1096), 또는 안테나 모듈(1097)을 포함할 수 있다. 어떤 실시 예에서는, 전자 장치(1001)에는, 이 구성요소들 중 적어도 하나(예: 연결 단자(1078))가 생략되거나, 하나 이상의 다른 구성요소가 추가될 수 있다. 어떤 실시 예에서는, 이 구성요소들 중 일부들(예: 센서 모듈(1076), 카메라 모듈(1080), 또는 안테나 모듈(1097))은 하나의 구성요소(예: 디스플레이 모듈(1060))로 통합될 수 있다.
프로세서(1020)는, 예를 들면, 소프트웨어(예: 프로그램(1040))를 실행하여 프로세서(1020)에 연결된 전자 장치(1001)의 적어도 하나의 다른 구성요소(예: 하드웨어 또는 소프트웨어 구성요소)를 제어할 수 있고, 다양한 데이터 처리 또는 연산을 수행할 수 있다. 일 실시 예에 따르면, 데이터 처리 또는 연산의 적어도 일부로서, 프로세서(1020)는 다른 구성요소(예: 센서 모듈(1076) 또는 통신 모듈(1090))로부터 수신된 명령 또는 데이터를 휘발성 메모리(1032)에 저장하고, 휘발성 메모리(1032)에 저장된 명령 또는 데이터를 처리하고, 결과 데이터를 비휘발성 메모리(1034)에 저장할 수 있다. 일 실시 예에 따르면, 프로세서(1020)는 메인 프로세서(1021)(예: 중앙 처리 장치 또는 어플리케이션 프로세서) 또는 이와는 독립적으로 또는 함께 운영 가능한 보조 프로세서(1023)(예: 그래픽 처리 장치, 신경망 처리 장치(NPU: neural processing unit), 이미지 시그널 프로세서, 센서 허브 프로세서, 또는 커뮤니케이션 프로세서)를 포함할 수 있다. 예를 들어, 전자 장치(1001)가 메인 프로세서(1021) 및 보조 프로세서(1023)를 포함하는 경우, 보조 프로세서(1023)는 메인 프로세서(1021)보다 저전력을 사용하거나, 지정된 기능에 특화되도록 설정될 수 있다. 보조 프로세서(1023)는 메인 프로세서(1021)와 별개로, 또는 그 일부로서 구현될 수 있다.
보조 프로세서(1023)는, 예를 들면, 메인 프로세서(1021)가 인액티브(예: 슬립) 상태에 있는 동안 메인 프로세서(1021)를 대신하여, 또는 메인 프로세서(1021)가 액티브(예: 어플리케이션 실행) 상태에 있는 동안 메인 프로세서(1021)와 함께, 전자 장치(1001)의 구성요소들 중 적어도 하나의 구성요소(예: 디스플레이 모듈(1060), 센서 모듈(1076), 또는 통신 모듈(1090))와 관련된 기능 또는 상태들의 적어도 일부를 제어할 수 있다. 일 실시 예에 따르면, 보조 프로세서(1023)(예: 이미지 시그널 프로세서 또는 커뮤니케이션 프로세서)는 기능적으로 관련 있는 다른 구성요소(예: 카메라 모듈(1080) 또는 통신 모듈(1090))의 일부로서 구현될 수 있다. 일 실시 예에 따르면, 보조 프로세서(1023)(예: 신경망 처리 장치)는 인공지능 모델의 처리에 특화된 하드웨어 구조를 포함할 수 있다. 인공지능 모델은 기계 학습을 통해 생성될 수 있다. 이러한 학습은, 예를 들어, 인공지능이 수행되는 전자 장치(1001) 자체에서 수행될 수 있고, 별도의 서버(예: 서버(1008))를 통해 수행될 수도 있다. 학습 알고리즘은, 예를 들어, 지도형 학습(supervised learning), 비지도형 학습(unsupervised learning), 준지도형 학습(semi-supervised learning) 또는 강화 학습(reinforcement learning)을 포함할 수 있으나, 전술한 예에 한정되지 않는다. 인공지능 모델은, 복수의 인공 신경망 레이어들을 포함할 수 있다. 인공 신경망은 심층 신경망(DNN: deep neural network), CNN(convolutional neural network), RNN(recurrent neural network), RBM(restricted boltzmann machine), DBN(deep belief network), BRDNN(bidirectional recurrent deep neural network), 심층 Q-네트워크(deep Q-networks) 또는 상기 중 둘 이상의 조합 중 하나일 수 있으나, 전술한 예에 한정되지 않는다. 인공지능 모델은 하드웨어 구조 이외에, 추가적으로 또는 대체적으로, 소프트웨어 구조를 포함할 수 있다.
메모리(1030)는, 전자 장치(1001)의 적어도 하나의 구성요소(예: 프로세서(1020) 또는 센서 모듈(1076))에 의해 사용되는 다양한 데이터를 저장할 수 있다. 데이터는, 예를 들어, 소프트웨어(예: 프로그램(1040)) 및, 이와 관련된 명령에 대한 입력 데이터 또는 출력 데이터를 포함할 수 있다. 메모리(1030)는, 휘발성 메모리(1032) 또는 비휘발성 메모리(1034)를 포함할 수 있다.
프로그램(1040)은 메모리(1030)에 소프트웨어로서 저장될 수 있으며, 예를 들면, 운영 체제(1042), 미들 웨어(1044) 또는 어플리케이션(1046)을 포함할 수 있다.
입력 모듈(1050)은, 전자 장치(1001)의 구성요소(예: 프로세서(1020))에 사용될 명령 또는 데이터를 전자 장치(1001)의 외부(예: 사용자)로부터 수신할 수 있다. 입력 모듈(1050)은, 예를 들면, 마이크, 마우스, 키보드, 키(예: 버튼), 또는 디지털 펜(예: 스타일러스 펜)을 포함할 수 있다.
음향 출력 모듈(1055)은 음향 신호를 전자 장치(1001)의 외부로 출력할 수 있다. 음향 출력 모듈(1055)은, 예를 들면, 스피커 또는 리시버를 포함할 수 있다. 스피커는 멀티미디어 재생 또는 녹음 재생과 같이 일반적인 용도로 사용될 수 있다. 리시버는 착신 전화를 수신하기 위해 사용될 수 있다. 일 실시 예에 따르면, 리시버는 스피커와 별개로, 또는 그 일부로서 구현될 수 있다.
디스플레이 모듈(1060)은 전자 장치(1001)의 외부(예: 사용자)로 정보를 시각적으로 제공할 수 있다. 디스플레이 모듈(1060)은, 예를 들면, 디스플레이, 홀로그램 장치, 또는 프로젝터 및 해당 장치를 제어하기 위한 제어 회로를 포함할 수 있다. 일 실시 예에 따르면, 디스플레이 모듈(1060)은 터치를 감지하도록 설정된 터치 센서, 또는 상기 터치에 의해 발생되는 힘의 세기를 측정하도록 설정된 압력 센서를 포함할 수 있다.
오디오 모듈(1070)은 소리를 전기 신호로 변환시키거나, 반대로 전기 신호를 소리로 변환시킬 수 있다. 일 실시 예에 따르면, 오디오 모듈(1070)은, 입력 모듈(1050)을 통해 소리를 획득하거나, 음향 출력 모듈(1055), 또는 전자 장치(1001)와 직접 또는 무선으로 연결된 외부 전자 장치(예: 전자 장치(1002))(예: 스피커 또는 헤드폰)를 통해 소리를 출력할 수 있다.
센서 모듈(1076)은 전자 장치(1001)의 작동 상태(예: 전력 또는 온도), 또는 외부의 환경 상태(예: 사용자 상태)를 감지하고, 감지된 상태에 대응하는 전기 신호 또는 데이터 값을 생성할 수 있다. 일 실시 예에 따르면, 센서 모듈(1076)은, 예를 들면, 제스처 센서, 자이로 센서, 기압 센서, 마그네틱 센서, 가속도 센서, 그립 센서, 근접 센서, 컬러 센서, IR(infrared) 센서, 생체 센서, 온도 센서, 습도 센서, 또는 조도 센서를 포함할 수 있다.
인터페이스(1077)는 전자 장치(1001)가 외부 전자 장치(예: 전자 장치(1002))와 직접 또는 무선으로 연결되기 위해 사용될 수 있는 하나 이상의 지정된 프로토콜들을 지원할 수 있다. 일 실시 예에 따르면, 인터페이스(1077)는, 예를 들면, HDMI(high definition multimedia interface), USB(universal serial bus) 인터페이스, SD카드 인터페이스, 또는 오디오 인터페이스를 포함할 수 있다.
연결 단자(1078)는, 그를 통해서 전자 장치(1001)가 외부 전자 장치(예: 전자 장치(1002))와 물리적으로 연결될 수 있는 커넥터를 포함할 수 있다. 일 실시 예에 따르면, 연결 단자(1078)는, 예를 들면, HDMI 커넥터, USB 커넥터, SD 카드 커넥터, 또는 오디오 커넥터(예: 헤드폰 커넥터)를 포함할 수 있다.
햅틱 모듈(1079)은 전기적 신호를 사용자가 촉각 또는 운동 감각을 통해서 인지할 수 있는 기계적인 자극(예: 진동 또는 움직임) 또는 전기적인 자극으로 변환할 수 있다. 일 실시 예에 따르면, 햅틱 모듈(1079)은, 예를 들면, 모터, 압전 소자, 또는 전기 자극 장치를 포함할 수 있다.
카메라 모듈(1080)은 정지 영상 및 동영상을 촬영할 수 있다. 일 실시 예에 따르면, 카메라 모듈(1080)은 하나 이상의 렌즈들, 이미지 센서들, 이미지 시그널 프로세서들, 또는 플래시들을 포함할 수 있다.
전력 관리 모듈(1088)은 전자 장치(1001)에 공급되는 전력을 관리할 수 있다. 일 실시 예에 따르면, 전력 관리 모듈(1088)은, 예를 들면, PMIC(power management integrated circuit)의 적어도 일부로서 구현될 수 있다.
배터리(1089)는 전자 장치(1001)의 적어도 하나의 구성요소에 전력을 공급할 수 있다. 일 실시 예에 따르면, 배터리(1089)는, 예를 들면, 재충전 불가능한 1차 전지, 재충전 가능한 2차 전지 또는 연료 전지를 포함할 수 있다.
통신 모듈(1090)은 전자 장치(1001)와 외부 전자 장치(예: 전자 장치(1002), 전자 장치(1004), 또는 서버(1008)) 간의 직접(예: 유선) 통신 채널 또는 무선 통신 채널의 수립, 및 수립된 통신 채널을 통한 통신 수행을 지원할 수 있다. 통신 모듈(1090)은 프로세서(1020)(예: 어플리케이션 프로세서)와 독립적으로 운영되고, 직접(예: 유선) 통신 또는 무선 통신을 지원하는 하나 이상의 커뮤니케이션 프로세서를 포함할 수 있다. 일 실시 예에 따르면, 통신 모듈(1090)은 무선 통신 모듈(1092)(예: 셀룰러 통신 모듈, 근거리 무선 통신 모듈, 또는 GNSS(global navigation satellite system) 통신 모듈) 또는 유선 통신 모듈(1094)(예: LAN(local area network) 통신 모듈, 또는 전력선 통신 모듈)을 포함할 수 있다. 이들 통신 모듈 중 해당하는 통신 모듈은 제1 네트워크(1098)(예: 블루투스, WiFi(wireless fidelity) direct 또는 IrDA(infrared data association)와 같은 근거리 통신 네트워크) 또는 제2 네트워크(1099)(예: 레거시 셀룰러 네트워크, 5G 네트워크, 차세대 통신 네트워크, 인터넷, 또는 컴퓨터 네트워크(예: LAN 또는 WAN)와 같은 원거리 통신 네트워크)를 통하여 외부의 전자 장치(1004)와 통신할 수 있다. 이런 여러 종류의 통신 모듈들은 하나의 구성요소(예: 단일 칩)로 통합되거나, 또는 서로 별도의 복수의 구성요소들(예: 복수 칩들)로 구현될 수 있다. 무선 통신 모듈(1092)은 가입자 식별 모듈(1096)에 저장된 가입자 정보(예: 국제 모바일 가입자 식별자(IMSI))를 이용하여 제1 네트워크(1098) 또는 제2 네트워크(1099)와 같은 통신 네트워크 내에서 전자 장치(1001)를 확인 또는 인증할 수 있다.
무선 통신 모듈(1092)은 4G 네트워크 이후의 5G 네트워크 및 차세대 통신 기술, 예를 들어, NR 접속 기술(new radio access technology)을 지원할 수 있다. NR 접속 기술은 고용량 데이터의 고속 전송(eMBB(enhanced mobile broadband)), 단말 전력 최소화와 다수 단말의 접속(mMTC(massive machine type communications)), 또는 고신뢰도와 저지연(URLLC(ultra-reliable and low-latency communications))을 지원할 수 있다. 무선 통신 모듈(1092)은, 예를 들어, 높은 데이터 전송률 달성을 위해, 고주파 대역(예: mmWave 대역)을 지원할 수 있다. 무선 통신 모듈(1092)은 고주파 대역에서의 성능 확보를 위한 다양한 기술들, 예를 들어, 빔포밍(beamforming), 거대 배열 다중 입출력(massive MIMO(multiple-input and multiple-output)), 전차원 다중입출력(FD-MIMO: full dimensional MIMO), 어레이 안테나(array antenna), 아날로그 빔형성(analog beam-forming), 또는 대규모 안테나(large scale antenna)와 같은 기술들을 지원할 수 있다. 무선 통신 모듈(1092)은 전자 장치(1001), 외부 전자 장치(예: 전자 장치(1004)) 또는 네트워크 시스템(예: 제2 네트워크(1099))에 규정되는 다양한 요구사항을 지원할 수 있다. 일 실시 예에 따르면, 무선 통신 모듈(1092)은 eMBB 실현을 위한 Peak data rate(예: 20Gbps 이상), mMTC 실현을 위한 손실 Coverage(예: 164dB 이하), 또는 URLLC 실현을 위한 U-plane latency(예: 다운링크(DL) 및 업링크(UL) 각각 0.5ms 이하, 또는 라운드 트립 1ms 이하)를 지원할 수 있다.
안테나 모듈(1097)은 신호 또는 전력을 외부(예: 외부의 전자 장치)로 송신하거나 외부로부터 수신할 수 있다. 일 실시 예에 따르면, 안테나 모듈(1097)은 서브스트레이트(예: PCB) 위에 형성된 도전체 또는 도전성 패턴으로 이루어진 방사체를 포함하는 안테나를 포함할 수 있다. 일 실시 예에 따르면, 안테나 모듈(1097)은 복수의 안테나들(예: 어레이 안테나)을 포함할 수 있다. 이런 경우, 제1 네트워크(1098) 또는 제2 네트워크(1099)와 같은 통신 네트워크에서 사용되는 통신 방식에 적합한 적어도 하나의 안테나가, 예를 들면, 통신 모듈(1090)에 의하여 상기 복수의 안테나들로부터 선택될 수 있다. 신호 또는 전력은 상기 선택된 적어도 하나의 안테나를 통하여 통신 모듈(1090)과 외부의 전자 장치 간에 송신되거나 수신될 수 있다. 어떤 실시 예에 따르면, 방사체 이외에 다른 부품(예: RFIC(radio frequency integrated circuit))이 추가로 안테나 모듈(1097)의 일부로 형성될 수 있다.
다양한 실시 예에 따르면, 안테나 모듈(1097)은 mmWave 안테나 모듈을 형성할 수 있다. 일 실시 예에 따르면, mmWave 안테나 모듈은 인쇄 회로 기판, 상기 인쇄 회로 기판의 제1 면(예: 아래 면)에 또는 그에 인접하여 배치되고 지정된 고주파 대역(예: mmWave 대역)을 지원할 수 있는 RFIC, 및 상기 인쇄 회로 기판의 제2 면(예: 윗 면 또는 측 면)에 또는 그에 인접하여 배치되고 상기 지정된 고주파 대역의 신호를 송신 또는 수신할 수 있는 복수의 안테나들(예: 어레이 안테나)을 포함할 수 있다.
상기 구성요소들 중 적어도 일부는 주변 기기들간 통신 방식(예: 버스, GPIO(general purpose input and output), SPI(serial peripheral interface), 또는 MIPI(mobile industry processor interface))을 통해 서로 연결되고 신호(예: 명령 또는 데이터)를 상호간에 교환할 수 있다.
일 실시 예에 따르면, 명령 또는 데이터는 제2 네트워크(1099)에 연결된 서버(1008)를 통해서 전자 장치(1001)와 외부의 전자 장치(1004)간에 송신 또는 수신될 수 있다. 외부의 전자 장치(1002, 또는 1004) 각각은 전자 장치(1001)와 동일한 또는 다른 종류의 장치일 수 있다. 일 실시 예에 따르면, 전자 장치(1001)에서 실행되는 동작들의 전부 또는 일부는 외부의 전자 장치들(1002, 1004, 또는 1008) 중 하나 이상의 외부의 전자 장치들에서 실행될 수 있다. 예를 들면, 전자 장치(1001)가 어떤 기능이나 서비스를 자동으로, 또는 사용자 또는 다른 장치로부터의 요청에 반응하여 수행해야 할 경우에, 전자 장치(1001)는 기능 또는 서비스를 자체적으로 실행시키는 대신에 또는 추가적으로, 하나 이상의 외부의 전자 장치들에게 그 기능 또는 그 서비스의 적어도 일부를 수행하라고 요청할 수 있다. 상기 요청을 수신한 하나 이상의 외부의 전자 장치들은 요청된 기능 또는 서비스의 적어도 일부, 또는 상기 요청과 관련된 추가 기능 또는 서비스를 실행하고, 그 실행의 결과를 전자 장치(1001)로 전달할 수 있다. 전자 장치(1001)는 상기 결과를, 그대로 또는 추가적으로 처리하여, 상기 요청에 대한 응답의 적어도 일부로서 제공할 수 있다. 이를 위하여, 예를 들면, 클라우드 컴퓨팅, 분산 컴퓨팅, 모바일 에지 컴퓨팅(MEC: mobile edge computing), 또는 클라이언트-서버 컴퓨팅 기술이 이용될 수 있다. 전자 장치(1001)는, 예를 들어, 분산 컴퓨팅 또는 모바일 에지 컴퓨팅을 이용하여 초저지연 서비스를 제공할 수 있다. 다른 실시 예에 있어서, 외부의 전자 장치(1004)는 IoT(internet of things) 기기를 포함할 수 있다. 서버(1008)는 기계 학습 및/또는 신경망을 이용한 지능형 서버일 수 있다. 일 실시 예에 따르면, 외부의 전자 장치(1004) 또는 서버(1008)는 제2 네트워크(1099) 내에 포함될 수 있다. 전자 장치(1001)는 5G 통신 기술 및 IoT 관련 기술을 기반으로 지능형 서비스(예: 스마트 홈, 스마트 시티, 스마트 카, 또는 헬스 케어)에 적용될 수 있다.
본 문서에 개시된 다양한 실시 예들에 따른 전자 장치는 다양한 형태의 장치가 될 수 있다. 전자 장치는, 예를 들면, 휴대용 통신 장치(예: 스마트폰), 컴퓨터 장치, 휴대용 멀티미디어 장치, 휴대용 의료 기기, 카메라, 웨어러블 장치, 또는 가전 장치를 포함할 수 있다. 본 문서의 실시 예에 따른 전자 장치는 전술한 기기들에 한정되지 않는다.
본 문서의 다양한 실시 예들 및 이에 사용된 용어들은 본 문서에 기재된 기술적 특징들을 특정한 실시 예들로 한정하려는 것이 아니며, 해당 실시 예의 다양한 변경, 균등물, 또는 대체물을 포함하는 것으로 이해되어야 한다. 도면의 설명과 관련하여, 유사한 또는 관련된 구성요소에 대해서는 유사한 참조 부호가 사용될 수 있다. 아이템에 대응하는 명사의 단수 형은 관련된 문맥상 명백하게 다르게 지시하지 않는 한, 상기 아이템 한 개 또는 복수 개를 포함할 수 있다. 본 문서에서, "A 또는 B", "A 및 B 중 적어도 하나", "A 또는 B 중 적어도 하나", "A, B 또는 C", "A, B 및 C 중 적어도 하나", 및 "A, B, 또는 C 중 적어도 하나"와 같은 문구들 각각은 그 문구들 중 해당하는 문구에 함께 나열된 항목들 중 어느 하나, 또는 그들의 모든 가능한 조합을 포함할 수 있다. "제1", "제2", 또는 "첫째" 또는 "둘째"와 같은 용어들은 단순히 해당 구성요소를 다른 해당 구성요소와 구분하기 위해 사용될 수 있으며, 해당 구성요소들을 다른 측면(예: 중요성 또는 순서)에서 한정하지 않는다. 어떤(예: 제1) 구성요소가 다른(예: 제2) 구성요소에, "기능적으로" 또는 "통신적으로"라는 용어와 함께 또는 이런 용어 없이, "커플드" 또는 "커넥티드"라고 언급된 경우, 그것은 상기 어떤 구성요소가 상기 다른 구성요소에 직접적으로(예: 유선으로), 무선으로, 또는 제3 구성요소를 통하여 연결될 수 있다는 것을 의미한다.
본 문서의 다양한 실시 예들에서 사용된 용어 "모듈"은 하드웨어, 소프트웨어 또는 펌웨어로 구현된 유닛을 포함할 수 있으며, 예를 들면, 로직, 논리 블록, 부품, 또는 회로와 같은 용어와 상호 호환적으로 사용될 수 있다. 모듈은, 일체로 구성된 부품 또는 하나 또는 그 이상의 기능을 수행하는, 상기 부품의 최소 단위 또는 그 일부가 될 수 있다. 예를 들면, 일 실시 예에 따르면, 모듈은 ASIC(application-specific integrated circuit)의 형태로 구현될 수 있다.
본 문서의 다양한 실시 예들은 기기(machine)(예: 전자 장치(1001)) 의해 읽을 수 있는 저장 매체(storage medium)(예: 내장 메모리(1036) 또는 외장 메모리(1038))에 저장된 하나 이상의 명령어들을 포함하는 소프트웨어(예: 프로그램(1040))로서 구현될 수 있다. 예를 들면, 기기(예: 전자 장치(1001))의 프로세서(예: 프로세서(1020))는, 저장 매체로부터 저장된 하나 이상의 명령어들 중 적어도 하나의 명령을 호출하고, 그것을 실행할 수 있다. 이것은 기기가 상기 호출된 적어도 하나의 명령어에 따라 적어도 하나의 기능을 수행하도록 운영되는 것을 가능하게 한다. 상기 하나 이상의 명령어들은 컴파일러에 의해 생성된 코드 또는 인터프리터에 의해 실행될 수 있는 코드를 포함할 수 있다. 기기로 읽을 수 있는 저장 매체는, 비일시적(non-transitory) 저장 매체의 형태로 제공될 수 있다. 여기서, '비일시적'은 저장 매체가 실재(tangible)하는 장치이고, 신호(signal)(예: 전자기파)를 포함하지 않는다는 것을 의미할 뿐이며, 이 용어는 데이터가 저장 매체에 반영구적으로 저장되는 경우와 임시적으로 저장되는 경우를 구분하지 않는다.
일 실시 예에 따르면, 본 문서에 개시된 다양한 실시 예들에 따른 방법은 컴퓨터 프로그램 제품(computer program product)에 포함되어 제공될 수 있다. 컴퓨터 프로그램 제품은 상품으로서 판매자 및 구매자 간에 거래될 수 있다. 컴퓨터 프로그램 제품은 기기로 읽을 수 있는 저장 매체(예: compact disc read only memory(CD-ROM))의 형태로 배포되거나, 또는 어플리케이션 스토어(예: 플레이 스토어TM)를 통해 또는 두 개의 사용자 장치들(예: 스마트 폰들) 간에 직접, 온라인으로 배포(예: 다운로드 또는 업로드)될 수 있다. 온라인 배포의 경우에, 컴퓨터 프로그램 제품의 적어도 일부는 제조사의 서버, 어플리케이션 스토어의 서버, 또는 중계 서버의 메모리와 같은 기기로 읽을 수 있는 저장 매체에 적어도 일시 저장되거나, 임시적으로 생성될 수 있다.
다양한 실시 예들에 따르면, 상기 기술한 구성요소들의 각각의 구성요소(예: 모듈 또는 프로그램)는 단수 또는 복수의 개체를 포함할 수 있으며, 복수의 개체 중 일부는 다른 구성요소에 분리 배치될 수도 있다. 다양한 실시 예들에 따르면, 전술한 해당 구성요소들 중 하나 이상의 구성요소들 또는 동작들이 생략되거나, 또는 하나 이상의 다른 구성요소들 또는 동작들이 추가될 수 있다. 대체적으로 또는 추가적으로, 복수의 구성요소들(예: 모듈 또는 프로그램)은 하나의 구성요소로 통합될 수 있다. 이런 경우, 통합된 구성요소는 상기 복수의 구성요소들 각각의 구성요소의 하나 이상의 기능들을 상기 통합 이전에 상기 복수의 구성요소들 중 해당 구성요소에 의해 수행되는 것과 동일 또는 유사하게 수행할 수 있다. 다양한 실시 예들에 따르면, 모듈, 프로그램 또는 다른 구성요소에 의해 수행되는 동작들은 순차적으로, 병렬적으로, 반복적으로, 또는 휴리스틱하게 실행되거나, 상기 동작들 중 하나 이상이 다른 순서로 실행되거나, 생략되거나, 또는 하나 이상의 다른 동작들이 추가될 수 있다.
도 11는 다양한 실시 예들에 따른, 카메라 모듈(1080)을 예시하는 블럭도(1100)이다. 도 11을 참조하면, 카메라 모듈(1080)은 렌즈 어셈블리(1110), 플래쉬(1120), 이미지 센서(1130), 이미지 스태빌라이저(1140), 메모리(1150)(예: 버퍼 메모리), 또는 이미지 시그널 프로세서(1160)를 포함할 수 있다. 렌즈 어셈블리(1110)는 이미지 촬영의 대상인 피사체로부터 방출되는 빛을 수집할 수 있다. 렌즈 어셈블리(1110)는 하나 또는 그 이상의 렌즈들을 포함할 수 있다. 일 실시 예에 따르면, 카메라 모듈(1080)은 복수의 렌즈 어셈블리(1110)들을 포함할 수 있다. 이런 경우, 카메라 모듈(1080)은, 예를 들면, 듀얼 카메라, 360도 카메라, 또는 구형 카메라(spherical camera)를 형성할 수 있다. 복수의 렌즈 어셈블리(1110)들 중 일부는 동일한 렌즈 속성(예: 화각, 초점 거리, 자동 초점, f 넘버(f number), 또는 광학 줌)을 갖거나, 또는 적어도 하나의 렌즈 어셈블리는 다른 렌즈 어셈블리의 렌즈 속성들과 다른 하나 이상의 렌즈 속성들을 가질 수 있다. 렌즈 어셈블리(1110)는, 예를 들면, 광각 렌즈 또는 망원 렌즈를 포함할 수 있다.
플래쉬(1120)는 피사체로부터 방출 또는 반사되는 빛을 강화하기 위하여 사용되는 빛을 방출할 수 있다. 일 실시 예에 따르면, 플래쉬(1120)는 하나 이상의 발광 다이오드들(예: RGB(red-green-blue) LED, white LED, infrared LED, 또는 ultraviolet LED), 또는 xenon lamp를 포함할 수 있다. 이미지 센서(1130)는 피사체로부터 방출 또는 반사되어 렌즈 어셈블리(1110)를 통해 전달된 빛을 전기적인 신호로 변환함으로써, 상기 피사체에 대응하는 이미지를 획득할 수 있다. 일 실시 예에 따르면, 이미지 센서(1130)는, 예를 들면, RGB 센서, BW(black and white) 센서, IR 센서, 또는 UV 센서와 같이 속성이 다른 이미지 센서들 중 선택된 하나의 이미지 센서, 동일한 속성을 갖는 복수의 이미지 센서들, 또는 다른 속성을 갖는 복수의 이미지 센서들을 포함할 수 있다. 이미지 센서(1130)에 포함된 각각의 이미지 센서는, 예를 들면, CCD(charged coupled device) 센서 또는 CMOS(complementary metal oxide semiconductor) 센서를 이용하여 구현될 수 있다.
이미지 스태빌라이저(1140)는 카메라 모듈(1080) 또는 이를 포함하는 전자 장치(1001)의 움직임에 반응하여, 렌즈 어셈블리(1110)에 포함된 적어도 하나의 렌즈 또는 이미지 센서(1130)를 특정한 방향으로 움직이거나 이미지 센서(1130)의 동작 특성을 제어(예: 리드 아웃(read-out) 타이밍을 조정 등)할 수 있다. 이는 촬영되는 이미지에 대한 상기 움직임에 의한 부정적인 영향의 적어도 일부를 보상하게 해 준다. 일 실시 예에 따르면, 이미지 스태빌라이저(1140)는, 일 실시 예에 따르면, 이미지 스태빌라이저(1140)는 카메라 모듈(1080)의 내부 또는 외부에 배치된 자이로 센서(미도시) 또는 가속도 센서(미도시)를 이용하여 카메라 모듈(1080) 또는 전자 장치(1001)의 그런 움직임을 감지할 수 있다. 일 실시 예에 따르면, 이미지 스태빌라이저(1140)는, 예를 들면, 광학식 이미지 스태빌라이저로 구현될 수 있다. 메모리(1150)는 이미지 센서(1130)를 통하여 획득된 이미지의 적어도 일부를 다음 이미지 처리 작업을 위하여 적어도 일시 저장할 수 있다. 예를 들어, 셔터에 따른 이미지 획득이 지연되거나, 또는 복수의 이미지들이 고속으로 획득되는 경우, 획득된 원본 이미지(예: Bayer-patterned 이미지 또는 높은 해상도의 이미지)는 메모리(1150)에 저장이 되고, 그에 대응하는 사본 이미지(예: 낮은 해상도의 이미지)는 표시 장치(1060)를 통하여 프리뷰 될 수 있다. 이후, 지정된 조건이 만족되면(예: 사용자 입력 또는 시스템 명령) 메모리(1150)에 저장되었던 원본 이미지의 적어도 일부가, 예를 들면, 이미지 시그널 프로세서(1160)에 의해 획득되어 처리될 수 있다. 일 실시 예에 따르면, 메모리(1150)는 메모리(1030)의 적어도 일부로, 또는 이와는 독립적으로 운영되는 별도의 메모리로 구성될 수 있다.
이미지 시그널 프로세서(1160)는 이미지 센서(1130)를 통하여 획득된 이미지 또는 메모리(1150)에 저장된 이미지에 대하여 하나 이상의 이미지 처리들을 수행할 수 있다. 상기 하나 이상의 이미지 처리들은, 예를 들면, 깊이 지도(depth map) 생성, 3차원 모델링, 파노라마 생성, 특징점 추출, 이미지 합성, 또는 이미지 보상(예: 노이즈 감소, 해상도 조정, 밝기 조정, 블러링(blurring), 샤프닝(sharpening), 또는 소프트닝(softening)을 포함할 수 있다. 추가적으로 또는 대체적으로, 이미지 시그널 프로세서(1160)는 카메라 모듈(1080)에 포함된 구성 요소들 중 적어도 하나(예: 이미지 센서(1130))에 대한 제어(예: 노출 시간 제어, 또는 리드 아웃 타이밍 제어 등)를 수행할 수 있다. 이미지 시그널 프로세서(1160)에 의해 처리된 이미지는 추가 처리를 위하여 메모리(1150)에 다시 저장되거나 카메라 모듈(1080)의 외부 구성 요소(예: 메모리(1030), 표시 장치(1060), 전자 장치(1002), 전자 장치(1004), 또는 서버(1008))로 제공될 수 있다. 일 실시 예에 따르면, 이미지 시그널 프로세서(1160)는 프로세서(1020)의 적어도 일부로 구성되거나, 프로세서(1020)와 독립적으로 운영되는 별도의 프로세서로 구성될 수 있다. 이미지 시그널 프로세서(1160)가 프로세서(1020)와 별도의 프로세서로 구성된 경우, 이미지 시그널 프로세서(1160)에 의해 처리된 적어도 하나의 이미지는 프로세서(1020)에 의하여 그대로 또는 추가의 이미지 처리를 거친 후 표시 장치(1060)를 통해 표시될 수 있다.
일 실시 예에 따르면, 전자 장치(1001)는 각각 다른 속성 또는 기능을 가진 복수의 카메라 모듈(1080)들을 포함할 수 있다. 이런 경우, 예를 들면, 상기 복수의 카메라 모듈(1080)들 중 적어도 하나는 광각 카메라이고, 적어도 다른 하나는 망원 카메라일 수 있다. 유사하게, 상기 복수의 카메라 모듈(1080)들 중 적어도 하나는 전면 카메라이고, 적어도 다른 하나는 후면 카메라일 수 있다.
본 문서의 일 실시 예에 따른 전자 장치는, 제1 광축을 따라 배열되는 렌즈 어셈블리, 상기 렌즈 어셈블리에 결합되고 상기 제1 광축을 따라 교대로 배치된 N극 및 S극을 적어도 2회 포함하는 구동 마그넷, 상기 구동 마그넷과 대면하고 상기 제1 광축을 따라 나란히 배치되는 제1 코일 및 제2 코일, 및 상기 제1 코일 및 상기 제2 코일과 전기적으로 연결되는 제어 회로를 포함할 수 있다. 상기 제어 회로는 상기 제1 코일에 인가되는 제1 전류 및 상기 제2 코일에 인가되는 제2 전류를 제어하여, 상기 렌즈 어셈블리가 상기 제1 코일 및 상기 제2 코일에 대해 상기 제1 광축 방향으로 이동하도록 제어할 수 있다.
본 문서의 일 실시 예에 따른 전자 장치에 있어서, 상기 구동 마그넷의 상기 N극 사이의 거리는 상기 제1 코일의 중심과 상기 제2 코일의 중심에 대해 지정된 비율을 가질 수 있다.
본 문서의 일 실시 예에 따른 전자 장치에 있어서, 상기 지정된 비율은 4/3일 수 있다.
본 문서의 일 실시 예에 따른 전자 장치에 있어서, 상기 제1 코일에 둘러싸인 제1 홀 센서(hall sensor)를 포함하고, 상기 제2 코일에 둘러싸인 제2 홀 센서를 포함하고, 상기 제어 회로는 상기 제1 홀 센서와 상기 제2 홀 센서를 통해 상기 구동 마그넷의 위치를 감지할 수 있다.
본 문서의 일 실시 예에 따른 전자 장치에 있어서, 상기 제어 회로는 상기 제1 홀 센서와 상기 제2 홀 센서의 결과 값을 교대로 이용하여 상기 렌즈 어셈블리의 이동을 제어할 수 있다.
본 문서의 일 실시 예에 따른 전자 장치에 있어서, 상기 구동 마그넷의 상기 N극 사이의 거리는 상기 제1 코일 및 상기 제2 코일 각각의 코일 권선 폭 및 코일 내측 홀의 폭에 대해 각각 4/1의 비율을 가질 수 있다.
본 문서의 일 실시 예에 따른 전자 장치는, 상기 구동 마그넷과 결합되고 상기 제1 광축을 따라 체적이 변화하는 센싱 마그넷을 포함하고, 상기 센싱 마그넷과 대면하는 제3 홀 센서를 더 포함하고, 상기 제어 회로는 상기 제3 홀 센서의 결과 값을 통해 상기 구동 마그넷의 위치를 감지할 수 있다.
본 문서의 일 실시 예에 따른 전자 장치는, 상기 렌즈 어셈블리와 대면하는 프리즘을 포함하고, 상기 프리즘은 상기 전자 장치의 카메라 홀을 통해 상기 제1 광축과 직각인 제2 광축으로 입사되는 광을 상기 제1 광축으로 전환하고, 상기 제1 광축으로 전환된 광은 상기 렌즈 어셈블리로 입사될 수 있다.
본 문서의 일 실시 예에 따른 전자 장치에 있어서, 상기 카메라 홀은 상기 전자 장치의 후면에 배치되고, 상기 렌즈 어셈블리, 상기 구동 마그넷, 상기 제1 코일, 상기 제2 코일 및 상기 프리즘을 포함하는 카메라 모듈은 상기 전자 장치의 후면 카메라에 포함될 수 있다.
본 문서의 일 실시 예에 따른 전자 장치에 있어서, 상기 카메라 홀을 포함하는 상기 전자 장치의 후면 중 적어도 일부 영역은 상기 전자 장치의 후면 중 나머지 영역보다 돌출될 수 있다.
본 문서의 일 실시 예에 따른 전자 장치에 있어서, 상기 카메라 홀을 포함하는 상기 전자 장치의 후면은 돌출되는 부분이 없이 평평한 평면을 형성할 수 있다.
본 문서의 일 실시 예에 따른 전자 장치에 있어서, 상기 제어 회로와 전기적으로 연결되는 적어도 하나의 프로세서를 포함하고, 상기 적어도 하나의 프로세서는 상기 제어 회로를 통해 상기 렌즈 어셈블리의 이동을 제어할 수 있다.
본 문서의 일 실시 예에 따른 전자 장치의 동작 방법은, 상기 전자 장치에 포함된 제어 회로가 제1 코일에 제1 전류를 인가하고, 제2 코일에 제2 전류를 인가하는 동작, 상기 제1 코일 및 상기 제2 코일은 제1 광축을 따라 나란히 배치됨, 상기 제어 회로가 상기 제1 코일 및 상기 제2 코일에 대면하고 상기 제1 광축을 따라 교대로 배치되는 N극 및 S극을 적어도 2회 포함하는 구동 마그넷을 상기 제1 광축 방향으로 이동하도록 제어하여, 상기 구동 마그넷에 결합되고 상기 제1 광축을 따라 배열되는 렌즈 어셈블리가 상기 제1 광축 방향으로 이동하도록 제어하는 동작을 포함할 수 있다.
본 문서의 일 실시 예에 따른 전자 장치의 동작 방법은, 상기 제어 회로가 상기 제1 코일에 둘러싸인 제1 홀 센서 및 상기 제2 코일에 둘러싸인 제2 홀 센서를 통해 상기 구동 마그넷의 위치를 감지하는 동작을 포함할 수 있다.
본 문서의 일 실시 예에 따른 전자 장치의 동작 방법은, 상기 제어 회로가 제3 홀 센서를 통해 상기 구동 마그넷과 결합되고 상기 제1 광축을 따라 체적이 변화하는 센싱 마그넷의 위치를 감지하는 동작을 포함할 수 있다.
본 문서의 일 실시 예에 따른 카메라 모듈은, 제1 광축을 따라 배열되는 렌즈 어셈블리, 상기 렌즈 어셈블리에 결합되고 상기 제1 광축을 따라 교대로 배치되는 N극 및 S극을 적어도 2회 포함하는 구동 마그넷, 및 상기 구동 마그넷과 대면하고 상기 제1 광축을 따라 나란히 배치되는 제1 코일 및 제2 코일을 포함할 수 있다. 상기 제1 코일 및 상기 제2 코일에 인가되는 전류에 따라 상기 렌즈 어셈블리가 상기 제1 광축을 따라 이동하고, 상기 구동 마그넷의 상기 N극 사이의 거리는 상기 제1 코일의 중심과 상기 제2 코일의 중심에 대해 지정된 비율을 가질 수 있다.
본 문서의 일 실시 예에 따른 카메라 모듈에 있어서, 상기 지정된 비율은 4/3일 수 있다.
본 문서의 일 실시 예에 따른 카메라 모듈은, 상기 제1 코일에 둘러싸인 제1 홀 센서를 포함하고, 상기 제2 코일에 둘러싸인 제2 홀 센서를 포함할 수 있다.
본 문서의 일 실시 예에 따른 카메라 모듈은, 상기 구동 마그넷과 결합되고 상기 제1 광축을 따라 체적이 변화하는 센싱 마그넷을 포함하고, 상기 센싱 마그넷과 대면하는 제3 홀 센서를 더 포함할 수 있다.
본 문서의 일 실시 예에 따른 카메라 모듈은, 상기 렌즈 어셈블리와 대면하는 프리즘을 포함하고, 상기 프리즘은 상기 제1 광축과 직각인 제2 광축으로 입사되는 광을 상기 제1 광축으로 전환하고, 상기 제1 광축으로 전환된 광은 상기 렌즈 어셈블리로 입사될 수 있다.
100: 전자 장치
110: 디스플레이
111: 평면 영역
112: 곡면 영역
120: 배젤
130: 카메라 영역
131: 전면 카메라
132: 후면 카메라
140: 제1 영역
141: 지문 센서
143: 센서
151: 제1 기능키
152: 제2 기능키
160: 후면 커버
200: 카메라 모듈
201: 카메라 홀
211: 제1 렌즈 어셈블리
212: 제2 렌즈 어셈블리
213: 제3 렌즈 어셈블리
221: 제1 렌즈 캐리어
222: 제2 렌즈 캐리어
231: 제1 구동 마그넷
232: 제2 구동 마그넷
233: 제1 OIS 마그넷
234: 제2 OIS 마그넷
235: 제3 OIS 마그넷
241: 제1 코일 그룹
242: 제2 코일 그룹
243: 제1 OIS 코일
244: 제2 OIS 코일
245: 제3 OIS 코일
251: 제1 볼 그룹
252: 제2 볼 그룹
253: 제1 OIS 볼 그룹
254: 제2 OIS 볼 그룹
260: 하우징
261: 제1 PCB
262: 제2 PCB
269: 커버
270: 프리즘
271: 프리즘 캐리어
272: 프리즘 가이드
273: OIS 홀더
280: 이미지 센서
501: 제1 광축
510: 렌즈 어셈블리
520: 렌즈 캐리어
530: 구동 마그넷
541: 제1 코일
542: 제2 코일
551: 제1 홀 센서
552: 제2 홀 센서
930: 센싱 마그넷
953: 제3 홀 센서
1000: 네트워크 환경
1001: 전자 장치
1002: 전자 장치
1004: 전자 장치
1008: 서버
1020: 프로세서
1021: 메인 프로세서
1023: 보조 프로세서
1030: 메모리
1032: 휘발성 메모리
1034: 비휘발성 메모리
1036: 내장 메모리
1038: 외장 메모리
1040: 프로그램
1042: 운영 체제
1044: 미들 웨어
1046: 어플리케이션
1050: 입력 모듈
1055: 음향 출력 모듈
1060: 디스플레이 모듈
1070: 오디오 모듈
1076: 센서 모듈
1077: 인터페이스
1078: 연결 단자
1079: 햅틱 모듈
1080: 카메라 모듈
1088: 전력 관리 모듈
1089: 배터리
1090: 통신 모듈
1092: 무선 통신 모듈
1094: 유선 통신 모듈
1096: 가입자 식별 모듈
1097: 안테나 모듈
1098: 제1 네트워크
1099: 제2 네트워크
1100: 블록도
1110: 렌즈 어셈블리
1120: 플래쉬
1130: 이미지 센서
1140: 이미지 스태빌라이저
1150: 메모리
1160: 이미지 시그널 프로세서
110: 디스플레이
111: 평면 영역
112: 곡면 영역
120: 배젤
130: 카메라 영역
131: 전면 카메라
132: 후면 카메라
140: 제1 영역
141: 지문 센서
143: 센서
151: 제1 기능키
152: 제2 기능키
160: 후면 커버
200: 카메라 모듈
201: 카메라 홀
211: 제1 렌즈 어셈블리
212: 제2 렌즈 어셈블리
213: 제3 렌즈 어셈블리
221: 제1 렌즈 캐리어
222: 제2 렌즈 캐리어
231: 제1 구동 마그넷
232: 제2 구동 마그넷
233: 제1 OIS 마그넷
234: 제2 OIS 마그넷
235: 제3 OIS 마그넷
241: 제1 코일 그룹
242: 제2 코일 그룹
243: 제1 OIS 코일
244: 제2 OIS 코일
245: 제3 OIS 코일
251: 제1 볼 그룹
252: 제2 볼 그룹
253: 제1 OIS 볼 그룹
254: 제2 OIS 볼 그룹
260: 하우징
261: 제1 PCB
262: 제2 PCB
269: 커버
270: 프리즘
271: 프리즘 캐리어
272: 프리즘 가이드
273: OIS 홀더
280: 이미지 센서
501: 제1 광축
510: 렌즈 어셈블리
520: 렌즈 캐리어
530: 구동 마그넷
541: 제1 코일
542: 제2 코일
551: 제1 홀 센서
552: 제2 홀 센서
930: 센싱 마그넷
953: 제3 홀 센서
1000: 네트워크 환경
1001: 전자 장치
1002: 전자 장치
1004: 전자 장치
1008: 서버
1020: 프로세서
1021: 메인 프로세서
1023: 보조 프로세서
1030: 메모리
1032: 휘발성 메모리
1034: 비휘발성 메모리
1036: 내장 메모리
1038: 외장 메모리
1040: 프로그램
1042: 운영 체제
1044: 미들 웨어
1046: 어플리케이션
1050: 입력 모듈
1055: 음향 출력 모듈
1060: 디스플레이 모듈
1070: 오디오 모듈
1076: 센서 모듈
1077: 인터페이스
1078: 연결 단자
1079: 햅틱 모듈
1080: 카메라 모듈
1088: 전력 관리 모듈
1089: 배터리
1090: 통신 모듈
1092: 무선 통신 모듈
1094: 유선 통신 모듈
1096: 가입자 식별 모듈
1097: 안테나 모듈
1098: 제1 네트워크
1099: 제2 네트워크
1100: 블록도
1110: 렌즈 어셈블리
1120: 플래쉬
1130: 이미지 센서
1140: 이미지 스태빌라이저
1150: 메모리
1160: 이미지 시그널 프로세서
Claims (20)
- 전자 장치에 있어서,
제1 광축을 따라 배열되는 렌즈 어셈블리;
상기 렌즈 어셈블리에 결합되고 상기 제1 광축을 따라 교대로 배치되는 N극 및 S극을 적어도 2회 포함하는 구동 마그넷;
상기 구동 마그넷과 대면하고 상기 제1 광축을 따라 나란히 배치되는 제1 코일 및 제2 코일; 및
상기 제1 코일 및 상기 제2 코일과 전기적으로 연결되는 제어 회로를 포함하고,
상기 제어 회로는 상기 제1 코일에 인가되는 제1 전류 및 상기 제2 코일에 인가되는 제2 전류를 제어하여, 상기 렌즈 어셈블리가 상기 제1 코일 및 상기 제2 코일에 대해 상기 제1 광축 방향으로 이동하도록 제어하는, 전자 장치. - 청구항 1에 있어서,
상기 구동 마그넷의 상기 N극 사이의 거리는 상기 제1 코일의 중심과 상기 제2 코일의 중심에 대해 지정된 비율을 가지는, 전자 장치. - 청구항 3에 있어서,
상기 지정된 비율은 4/3인, 전자 장치. - 청구항 2에 있어서,
상기 제1 코일에 둘러싸인 제1 홀 센서(hall sensor)를 포함하고,
상기 제2 코일에 둘러싸인 제2 홀 센서를 포함하고,
상기 제어 회로는 상기 제1 홀 센서와 상기 제2 홀 센서를 통해 상기 구동 마그넷의 위치를 감지하는, 전자 장치. - 청구항 4에 있어서,
상기 제어 회로는 상기 제1 홀 센서와 상기 제2 홀 센서의 결과 값을 교대로 이용하여 상기 렌즈 어셈블리의 이동을 제어하는, 전자 장치. - 청구항 1에 있어서,
상기 구동 마그넷의 상기 N극 사이의 거리는 상기 제1 코일 및 상기 제2 코일 각각의 코일 권선 폭 및 코일 내측 홀의 폭에 대해 각각 4/1의 비율을 가지는, 전자 장치. - 청구항 4에 있어서,
상기 구동 마그넷과 결합되고 상기 제1 광축을 따라 체적이 변화하는 센싱 마그넷을 포함하고,
상기 센싱 마그넷과 대면하는 제3 홀 센서를 더 포함하고,
상기 제어 회로는 상기 제3 홀 센서의 결과 값을 통해 상기 구동 마그넷의 위치를 감지하는, 전자 장치. - 청구항 1에 있어서,
상기 렌즈 어셈블리와 대면하는 프리즘을 포함하고,
상기 프리즘은 상기 전자 장치의 카메라 홀을 통해 상기 제1 광축과 직각인 제2 광축으로 입사되는 광을 상기 제1 광축으로 전환하고,
상기 제1 광축으로 전환된 광은 상기 렌즈 어셈블리로 입사되는, 전자 장치. - 청구항 8에 있어서,
상기 카메라 홀은 상기 전자 장치의 후면에 배치되고,
상기 렌즈 어셈블리, 상기 구동 마그넷, 상기 제1 코일, 상기 제2 코일 및 상기 프리즘을 포함하는 카메라 모듈은 상기 전자 장치의 후면 카메라에 포함되는, 전자 장치. - 청구항 9에 있어서,
상기 카메라 홀을 포함하는 상기 전자 장치의 후면 중 적어도 일부 영역은 상기 전자 장치의 후면 중 나머지 영역보다 돌출된, 전자 장치. - 청구항 9에 있어서,
상기 카메라 홀을 포함하는 상기 전자 장치의 후면은 돌출되는 부분이 없이 평평한 평면을 형성하는, 전자 장치. - 청구항 1에 있어서,
상기 제어 회로와 전기적으로 연결되는 적어도 하나의 프로세서를 포함하고,
상기 적어도 하나의 프로세서는 상기 제어 회로를 통해 상기 렌즈 어셈블리의 이동을 제어하는, 전자 장치. - 전자 장치의 동작 방법에 있어서,
상기 전자 장치에 포함된 제어 회로가 제1 코일에 제1 전류를 인가하고, 제2 코일에 제2 전류를 인가하는 동작, 상기 제1 코일 및 상기 제2 코일은 제1 광축을 따라 나란히 배치됨;
상기 제어 회로가 상기 제1 코일 및 상기 제2 코일에 대면하고 상기 제1 광축을 따라 교대로 배치되는 N극 및 S극을 적어도 2회 포함하는 구동 마그넷을 상기 제1 광축 방향으로 이동하도록 제어하여, 상기 구동 마그넷에 결합되고 상기 제1 광축을 따라 배열되는 렌즈 어셈블리가 상기 제1 광축 방향으로 이동하도록 제어하는 동작을 포함하는, 전자 장치의 동작 방법. - 청구항 13에 있어서,
상기 제어 회로가 상기 제1 코일에 둘러싸인 제1 홀 센서 및 상기 제2 코일에 둘러싸인 제2 홀 센서를 통해 상기 구동 마그넷의 위치를 감지하는 동작을 포함하는, 전자 장치의 동작 방법. - 청구항 14에 있어서,
상기 제어 회로가 제3 홀 센서를 통해 상기 구동 마그넷과 결합되고 상기 제1 광축을 따라 체적이 변화하는 센싱 마그넷의 위치를 감지하는 동작을 포함하는, 전자 장치의 동작 방법. - 카메라 모듈에 있어서,
제1 광축을 따라 배열되는 렌즈 어셈블리;
상기 렌즈 어셈블리에 결합되고 상기 제1 광축을 따라 교대로 배치되는 N극 및 S극을 적어도 2회 포함하는 구동 마그넷; 및
상기 구동 마그넷과 대면하고 상기 제1 광축을 따라 나란히 배치되는 제1 코일 및 제2 코일을 포함하고,
상기 제1 코일 및 상기 제2 코일에 인가되는 전류에 따라 상기 렌즈 어셈블리가 상기 제1 광축을 따라 이동하고,
상기 구동 마그넷의 상기 N극 사이의 거리는 상기 제1 코일의 중심과 상기 제2 코일의 중심에 대해 지정된 비율을 가지는, 카메라 모듈. - 청구항 16에 있어서,
상기 지정된 비율은 4/3인, 카메라 모듈. - 청구항 16에 있어서,
상기 제1 코일에 둘러싸인 제1 홀 센서를 포함하고,
상기 제2 코일에 둘러싸인 제2 홀 센서를 포함하는, 카메라 모듈. - 청구항 18에 있어서,
상기 구동 마그넷과 결합되고 상기 제1 광축을 따라 체적이 변화하는 센싱 마그넷을 포함하고,
상기 센싱 마그넷과 대면하는 제3 홀 센서를 더 포함하는, 카메라 모듈. - 청구항 19에 있어서,
상기 렌즈 어셈블리와 대면하는 프리즘을 포함하고,
상기 프리즘은 상기 제1 광축과 직각인 제2 광축으로 입사되는 광을 상기 제1 광축으로 전환하고,
상기 제1 광축으로 전환된 광은 상기 렌즈 어셈블리로 입사되는, 카메라 모듈.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020200169625A KR20220080477A (ko) | 2020-12-07 | 2020-12-07 | 광학식 줌을 지원하는 카메라 모듈 및 이를 포함하는 전자 장치 |
| EP21903688.6A EP4242742A1 (en) | 2020-12-07 | 2021-11-23 | Camera module for supporting optical zoom, and electronic device comprising same |
| PCT/KR2021/017233 WO2022124642A1 (ko) | 2020-12-07 | 2021-11-23 | 광학식 줌을 지원하는 카메라 모듈 및 이를 포함하는 전자 장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020200169625A KR20220080477A (ko) | 2020-12-07 | 2020-12-07 | 광학식 줌을 지원하는 카메라 모듈 및 이를 포함하는 전자 장치 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20220080477A true KR20220080477A (ko) | 2022-06-14 |
Family
ID=81973781
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020200169625A KR20220080477A (ko) | 2020-12-07 | 2020-12-07 | 광학식 줌을 지원하는 카메라 모듈 및 이를 포함하는 전자 장치 |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP4242742A1 (ko) |
| KR (1) | KR20220080477A (ko) |
| WO (1) | WO2022124642A1 (ko) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024014672A1 (ko) * | 2022-07-15 | 2024-01-18 | 삼성전자주식회사 | 카메라 및 이를 포함하는 전자 장치 |
| WO2024019283A1 (ko) * | 2022-07-19 | 2024-01-25 | 삼성전자주식회사 | 카메라 및 이를 포함하는 전자 장치 |
| WO2024039016A1 (ko) * | 2022-08-19 | 2024-02-22 | 삼성전자주식회사 | 렌즈들을 포함하는 카메라 및 이를 포함하는 전자 장치 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007256144A (ja) * | 2006-03-24 | 2007-10-04 | Shicoh Eng Co Ltd | 位置検出装置及びレンズ駆動装置 |
| JP5359443B2 (ja) * | 2009-03-25 | 2013-12-04 | Tdk株式会社 | レンズアクチュエータ |
| JP2017111193A (ja) * | 2015-12-14 | 2017-06-22 | オリンパス株式会社 | 撮像装置および内視鏡 |
| KR102072810B1 (ko) * | 2017-02-08 | 2020-02-03 | 삼성전기주식회사 | 카메라 모듈 및 이를 포함하는 휴대용 전자기기 |
| CN114615399A (zh) * | 2019-01-03 | 2022-06-10 | 核心光电有限公司 | 双重相机 |
-
2020
- 2020-12-07 KR KR1020200169625A patent/KR20220080477A/ko active Search and Examination
-
2021
- 2021-11-23 EP EP21903688.6A patent/EP4242742A1/en active Pending
- 2021-11-23 WO PCT/KR2021/017233 patent/WO2022124642A1/ko unknown
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024014672A1 (ko) * | 2022-07-15 | 2024-01-18 | 삼성전자주식회사 | 카메라 및 이를 포함하는 전자 장치 |
| WO2024019283A1 (ko) * | 2022-07-19 | 2024-01-25 | 삼성전자주식회사 | 카메라 및 이를 포함하는 전자 장치 |
| WO2024039016A1 (ko) * | 2022-08-19 | 2024-02-22 | 삼성전자주식회사 | 렌즈들을 포함하는 카메라 및 이를 포함하는 전자 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2022124642A1 (ko) | 2022-06-16 |
| EP4242742A1 (en) | 2023-09-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP4242742A1 (en) | Camera module for supporting optical zoom, and electronic device comprising same | |
| KR20220049952A (ko) | 카메라 모듈 및 이를 포함하는 전자 장치 | |
| KR20220072616A (ko) | 복수의 카메라를 포함하는 전자 장치 및 그 전자 장치의 제어 방법 | |
| US20230384556A1 (en) | Camera module and electronic device having same | |
| US20230014687A1 (en) | Electronic device including camera and method of operating the same | |
| US20230007149A1 (en) | Electronic device including camera module and method for operating the electronic device | |
| US20220385822A1 (en) | Camera module and electronic device having same | |
| EP4258647A1 (en) | Method and electronic device for correcting camera shake | |
| US20230229058A1 (en) | Camera module that performs image stabilization | |
| KR20230165667A (ko) | 카메라 모듈 및 이를 포함하는 모바일 전자 장치 | |
| US20230418129A1 (en) | Camera module and electronic device comprising same | |
| US20230135247A1 (en) | Electronic device including structure that reduces vibration in camera module | |
| EP4328669A1 (en) | Camera module and electronic apparatus including same | |
| EP4310588A1 (en) | Image stabilizer and electronic device comprising same | |
| EP4311251A1 (en) | Camera module and electronic device comprising same | |
| US20230224564A1 (en) | Electronic device including camera module | |
| KR20220133525A (ko) | 이미지 안정화 어셈블리를 포함하는 카메라 모듈 및 상기 카메라 모듈을 포함하는 전자 장치 | |
| KR20230165097A (ko) | 이미지 센서를 포함하는 전자 장치 및 그 동작 방법 | |
| KR20220046820A (ko) | 카메라 모듈 및 이를 포함하는 전자 장치 | |
| KR20230059103A (ko) | 카메라 모듈을 포함하는 전자 장치 및 그 전자 장치의 동작 방법 | |
| KR20220142135A (ko) | 반사체 및 렌즈 어셈블리를 포함하는 전자 장치 | |
| KR20230175085A (ko) | 액추에이터, 그 액추에이터를 포함하는 카메라 모듈 및 그 카메라 모듈을 포함하는 전자 장치 | |
| KR20240010374A (ko) | 카메라 및 이를 포함하는 전자 장치 | |
| KR20220061811A (ko) | 카메라 모듈을 포함하는 전자 장치 및 그 전자 장치의 동작 방법 | |
| KR20220142205A (ko) | 카메라 촬영 시 스캔하는 방법 및 그 전자 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination |