KR20200097816A - 수술용 장착 플랫폼의 사용자 개시 브레이크-어웨이 클러칭 - Google Patents
수술용 장착 플랫폼의 사용자 개시 브레이크-어웨이 클러칭 Download PDFInfo
- Publication number
- KR20200097816A KR20200097816A KR1020207023019A KR20207023019A KR20200097816A KR 20200097816 A KR20200097816 A KR 20200097816A KR 1020207023019 A KR1020207023019 A KR 1020207023019A KR 20207023019 A KR20207023019 A KR 20207023019A KR 20200097816 A KR20200097816 A KR 20200097816A
- Authority
- KR
- South Korea
- Prior art keywords
- linkage
- joint
- manual
- signal
- posture
- Prior art date
Links
Images











Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/77—Manipulators with motion or force scaling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1628—Programme controls characterised by the control loop
- B25J9/1633—Programme controls characterised by the control loop compliant, force, torque control, e.g. combined with position control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1656—Programme controls characterised by programming, planning systems for manipulators
- B25J9/1669—Programme controls characterised by programming, planning systems for manipulators characterised by special application, e.g. multi-arm co-operation, assembly, grasping
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/301—Surgical robots for introducing or steering flexible instruments inserted into the body, e.g. catheters or endoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/304—Surgical robots including a freely orientable platform, e.g. so called 'Stewart platforms'
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/064—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension
- A61B2090/066—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension for measuring torque
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
- A61B2090/508—Supports for surgical instruments, e.g. articulated arms with releasable brake mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/35—Surgical robots for telesurgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Master-slave robots
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40414—Man robot interface, exchange of information between operator and robot
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/02—Arm motion controller
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Robotics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Mechanical Engineering (AREA)
- Pathology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Manipulator (AREA)
Abstract
로봇 및/또는 수술 장치, 시스템 및 방법은 사용을 위한 시스템의 준비를 용이하게 해주도록 구성된 기구학적 링키지 구조와 연계된 제어 시스템을 포함한다. 하나 이상의 기구학적 링키지 서브시스템이 능동적으로 구동되거나, 피동형이거나 능동적 구동과 피동형의 혼합인 조인트들을 포함할 수 있다. 셋업 모드가 하나 이상의 조인트가 초기에 브레이크 또는 조인트 구동 시스템에 의해 정적으로 유지되게 되는 직관적인 사용자 인터페이스를 채용한다. 사용자가 수동식 관절운동 임계값을 초과하는 힘, 토크 등으로 링키지를 수동식으로 미는 것에 의해 조인트를 관절운동시킬 수 있다. 운동하는 조인트의 관절운동은 브레이크 또는 구동 시스템에 전달되는 신호를 수정함으로써 용이하게 된다. 시스템은 임계값 미만으로 떨어진, 선택적으로 소정의 체류 시간 동안의, 조인트의 속도로부터 재구성의 완료를 감지할 수 있다. 그시스템은 기계적으로 미리 정해진 디텐트 조인트 구성에 한정되지 않는 디텐트형 수동식 관절운동을 제공할 수 있다. 본발명의 실시형태는 직관적인 사용자 인터페이스를 제공하고, 특히 추가적인 입력 장치를 부가할 필요 없이 로봇 수술 시스템 등에서 복수의 수술용 매니퓰레이터를 지지하는 플랫폼의 수동식 운동에 적합화될 수 있다.
Description
본 발명은 대체로 수술 시스템에 사용하기 위한 로봇 시스템 및 그 로봇 시스템을 구성하는 방법에 관한 것이다.
최소 침습 의료 기술은 진단 또는 수술 과정 중에 손상되게 되는 무관한 조직의 양을 감소시킴으로써, 환자의 회복 시간, 불편함 및 유해한 부작용을 감소시키도록 의도되어 있다. 예컨대, 최소 침습 수술의 한 가지 효과는 감소된 수술 후의 병원내 회복 시간이다. 표준 수술의 평균 입원 기간이 일반적으로 유사한 최소 침습 수술의 평균 입원 기간보다 상당히 더 길기 때문에, 최소 침습 기술의 이용의 증가가 매년 수백만 달러의 병원 비용을 절감시킬 수 있을 것이다. 미국에서 매년 시행되는 수많은 수술들이 잠재적으로 최소 침습식으로 시행될 수 있겠지만, 한정된 최소 침습 수술 기구들과 그것들을 완전히 익히는 데 수반되는 추가적인 수술 훈련으로 인해, 현행 수술들의 일부만이 이 유리한 기술을 이용하고 있다.
최소 침습 로봇 수술 또는 원격 수술 시스템은 외과의의 조작술을 증대시키고 통상적인 최소 침습 기술 상의 어떤 한계를 회피하도록 개발되어 왔다. 원격 수술에 있어서, 외과의는 수술 기구 운동을 조작하기 위해 기구를 직접 손으로 파지하여 이동시키는 것이 아니라 어떤 형태의 원격 제어(예컨대, 서보기구 등)를 이용한다. 원격 수술 시스템에 있어서, 외과의는 수술용 워크스테이션에서 수술 부위의 영상을 제공받을 수 있다. 디스플레이 상의 수술 부위의 2차원 또는 3차원 영상을 보면서, 외과의는 마스터 제어 장치를 조작하고, 결과적으로 서보기구적으로 작동되는 기구들의 운동을 제어함으로써 환자에 대한 수술 과정을 수행한다.
원격 수술을 위해 사용되는 서보기구는 흔히 2개의 마스터 컨트롤러(외과의의 각각의 손마다 하나씩)로부터 입력을 수취하고, 각각에 수술 기구가 장착되는 2개 이상의 로봇 암을 구비할 수 있다. 마스터 컨트롤러와 연계된 로봇 암 및 기구 어셈블리 간의 작동 통신은 일반적으로 제어 시스템을 통해 성취된다. 제어 시스템은 일반적으로 마스터 컨트롤러로부터의 입력 명령을 연계된 로봇 암 및 기구 어셈블리로 전달하고, 예컨대 힘 피드백 등의 경우에 기구 및 암 어셈블리로부터 연계된 마스터 컨트롤러로 다시 전달하는 적어도 하나의 프로세서를 포함한다. 로봇 수술 시스템의 하나의 예는 미국 캘리포니아주 서니베일 소재의 인튜어티브 서지컬 인코포레이티드(Intuitive Surgical, Inc.)의 DA VINCI® 시스템이다.
다양한 구조 장치들이 로봇 수술 중에 수술 부위에 위치한 수술 기구를 지지하는 데 사용될 수 있다. 피구동 링키지(driven linkage) 또는 "슬레이브(slave)"는 흔히 로봇 수술용 매니퓰레이터라 불려지고, 최소 침습 로봇 수술 중에 로봇 수술용 매니퓰레이터로서 사용하기 위한 예시의 링키지 구성이 예시의 링키지 구성들이 미국 특허 제7,594,912호; 제6,758,843호; 제6,246,200호; 및 제5,800,423호에 개시되어 있으며; 이들의 전체 개시사항이 여기에 참조된다. 이들 링키지는 흔히 샤프트를 가진 기구를 유지하기 위한 샤프트를 가진 기구를 유지하기 위한 평행사변형 배열구조를 이용한다. 그러한 매니퓰레이터 구조는 기구가 강성 샤프트의 길이를 따른 공간 내에 포지셔닝된 조작의 원격 중심(remote center) 둘레로 피벗운동하도록 기구의 운동을 제한할 수 있다. 조작의 원격 중심을 내부 수술 부위로의 절개점과 정렬시킴으로써(예컨대, 복강경 수술 중에 복벽에 위치하는 트로카(trocar) 또는 캐뉼라(cannula)에 의해), 수술 기구의 엔드 이펙터는 매니퓰레이터 링키지를 이용하여 샤프트의 근위 단부를 이동시키는 것에 의해 복벽에 잠재적으로 위험한 힘을 강제하는 일 없이 안전하게 포지셔닝될 수 있다. 대안적인 매니퓰레이터 구조가 예컨대 미국 특허 제7,763,015호; 제6,702,805호; 제6,676,669호; 제5,855,583호; 제5,808,665호; 제5,445,166호; 및 제5,184,601호에 개시되어 있으며; 이들의 전체 개시사항이 여기에 참조된다.
다양한 구조적 배열들이 또한 로봇 수술 중에 로봇 수술용 매니퓰레이터 및 수술 부위에 위치한 수술 기구를 지지하고 포지셔닝시키는 데 사용될 수 있다. 종종 셋업 조인트(set-up joint) 또는 셋업 조인트 암이라고 불려지는 지지 링키지 기구들이 흔히 각각의 매니퓰레이터를 환자의 신체 내의 각각의 절개점에 대해 포지셔닝시키고 정렬시키는 데 사용된다. 지지 링키지 기구는 수술용 매니퓰레이터의 소정의 수술 절개점 및 목표한 인체 구조부와의 정렬을 용이하게 해준다. 예시적인 지지 링키지 기구가 미국 특허 제6,246,200호 및 제6,788,018호에 개시되어 있으며, 이들의 전체 개시사항이 여기에 참조된다.
이 신규한 원격 수술 시스템 및 장치들이 매우 효과적이고 유익한 것으로 판명되었지만, 여전히 추가적인 개선점들이 요망되고 있다. 전반적으로, 개선된 최소 침습 로봇 수술 시스템이 요망되고 있다. 이러한 개선된 기술들이 로봇 수술 시스템의 이용의 효율성 및 편이성을 향상시킨다면 특히 유익할 것이다. 예컨대, 기동성을 증대시키고, 수술실 내의 공간 활용을 개선시키고, 더 신속하고 더 쉬운 구성을 제공하고, 사용 중의 로봇 장치들 간의 충돌을 방지하고, 그리고/또는 이러한 신규한 수술 시스템의 기계적 복잡성 및 크기를 감소시키는 것이 특히 유익할 것이다.
이하 본 발명의 기초적 이해를 제공하기 위한 발명의 몇 가지 실시형태의 간략한 개요를 제시한다. 이 개요는 본 발명의 폭넓은 개관은 아니다. 이 개요는 발명의 주요한/결정적인 요소들을 확인하거나 본 발명의 범위를 기술하고자 하는 것은 아니다. 그 목적은 단지 본 발명의 몇 가지 실시형태를 추후에 제공될 보다 상세한 설명의 선도적인 간략한 형태로 제시하고자 하는 것일 뿐이다.
본 발명은 대체로 개선된 로봇 및/또는 수술 장치, 시스템 및 방법을 제공한다. 여기에 설명되는 기구학적 링키지 구조와 연계된 제어 시스템은 특히 시스템 사용자가 수술 과정을 준비하는 것을 포함하여 사용을 위한 준비에 있어 특정 환자에 대해 로봇 구조부를 배열하는 것을 도와주는 데 특히 유익하다. 여기에 설명되는 예시의 로봇 수술 시스템은 매니퓰레이터 구조부를 수술 작업 부위와 정렬시키는 것을 돕도록 구성되어 있는 하나 이상의 기구학적 링키지 서브시스템(sub-system)을 가질 수 있다. 이러한 셋업 시스템(set-up system)들의 조인트들은 능동적으로 구동될 수 있거나 피동형일 수 있으며(셋업 시스템들의 조인트들이 수동식(manual)으로 관절운동(articulation)된 다음 매니퓰레이터가 치료상으로 사용되는 동안 소정의 구성으로 잠금되도록), 또는 능동적 구동과 피동형의 혼합일 수 있다. 여기에 설명되는 로봇 시스템의 실시형태들은 하나 이상의 조인트가 초기에 브레이크 또는 조인트 구동 시스템에 의해 정적으로 유지되게 되는 셋업 모드(set-up mode)를 채용할 수 있다. 의도하지 않은 관절운동이 브레이크 또는 구동 시스템에 의해 제한되지만, 사용자가 그 조인트의 수동식 관절운동 임계값(threshold)을 초과하는 힘, 토크 등으로 링키지를 수동식으로 미는 것에 의해 조인트를 수동식으로 관절운동시킬 수 있다. 일단 그 조인트가 이동하기 시작하면, 프로세서가 브레이크 또는 구동 시스템에 전달되는 신호를 수정함으로써 더 작은 사용자 조작력에 의한 관절운동을 가능하게 해줄 수 있다. 사용자가 원하는 소정의 구성에 도달했을 때, 시스템은 사용자가 임계값 미만의, 선택적으로 소정의 체류 시간(dwell time) 동안의, 조인트의 속도로부터 재구성을 완료하였는지를 감지할 수 있다. 그런 다음 시스템은 다시 조인트의 의도하지 않은 관절운동을 방지할 수 있다. 상기 체류 시간은 방향을 반전시킬 때 링키지를 잠금하게 되는 것을 회피하는 것을 도와줄 수 있으며, 시스템은 기계적으로 미리 정해진 디텐트 조인트 구성에 한정되지 않는 "디텐트형(detent-like)" 수동식 관절운동을 제공할 수 있다. 본발명의 실시형태는 직관적인(intuitive) 사용자 인터페이스를 제공하고, 특히 추가적인 입력 장치를 부가할 필요 없이 로봇 수술 시스템 등에서 복수의 수술용 매니퓰레이터를 지지하는 플랫폼의 수동식 운동에 적합화될 수 있다.
제1 양태에 있어서, 본 발명은 로봇 시스템을 구성하는 방법을 제공한다. 상기 방법은 소정의 관절운동 임계값 미만인 링키지에 대한 제1 수동식 조작력에 응답하여, 제1 자세로부터의 상기 시스템의 상기 링키지의 수동식 관절운동을 방지하는 단계를 포함한다. 상기 소정의 관절운동 임계값을 초과하여 상기 링키지를 관절운동시키는 제2 수동식 조작력에 응답하여, 상기 제1 자세로부터 제2 자세를 향한 상기 링키지의 수동식 운동이 가능해진다. 상기 제2 자세는 상기 링키지의 상기 수동식 운동에 응답하여 결정된다. 상기 제2 자세로부터의 상기 링키지의 수동식 운동이 방지된다.
그에 따라, 제1 양태에 있어서, 로봇 시스템을 구성하는 방법에 제공된다. 상기 방법은 링키지에 대한 제1 수동식 조작력에 응답하여, 제1 자세로부터의 상기 시스템의 상기 링키지의 수동식 관절운동을 방지하는 단계, 상기 제1 자세로부터 제2 자세를 향한 상기 링키지의 수동식 운동을 가능하게 해주는 단계, 상기 링키지의 상기 수동식 운동에 응답하여 상기 제2 자세를 결정하는 단계, 및 상기 제2 자세로부터의 상기 링키지의 수동식 운동을 방지하는 단계를 포함한다. 상기 수동식 운동을 가능하게 해주는 단계는 상기 소정의 관절운동 임계값을 초과하는 상기 링키지에 대한 제2 수동식 조작력에 응답하여 이루어진다.
다른 예시의 실시형태 있어서, 조인트 센서가 조인트에 가해지는 상기 제1 수동식 조작력의 제1 토크를 감지할 수 있고, 프로세서가 상기 링키지를 상기 제1 자세를 향해 되돌아가게 가압하도록 상기 제1 토크에 대항하는 상기 링키지에 대한 대항 토크를 유발하도록 구성된 구동 신호를 결정함으로써 상기 수동 관절운동을 방지할 수 있다. 또 다른 실시형태에 있어서, 상기 조인트 센서는 상기 조인트에 가해지는 상기 제2 수동식 조작력의 제2 토크를 감지할 수 있고, 상기 프로세서는 상기 제2 조작력이 상기 소정의 관절운동 임계값을 초과하는지를 판정하도록 구성될 수 있다. 예컨대, 몇몇의 실시형태에 있어서, 상기 관절운동 임계값은 토크 임계값일 수 있고, 상기 프로세서는 상기 제2 토크가 상기 토크 임계값을 초과하는지를 판정함으로써 상기 제2 조작력이 상기 소정의 관절운동 임계값을 초과하는지를 판정할 수 있다. 상기 소정의 관절운동 임계값을 초과하는 상기 제2 조작력에 응답하여, 상기 프로세서는 상기 제1 토크가 매니퓰레이터를 수동식으로 이동시키기에 충분하도록 상기 대항 토크를 감소시키기 위해 상기 구동 신호를 변경시킬 수 있다.
상기 방법의 몇몇의 실시형태에 있어서, 프로세서가 상기 소정의 관절운동 임계값을 초과하는 상기 제2 조작력에 응답하여, 상기 제2 자세를 향한 상기 수동식 운동을 위해 상기 링키지의 마찰을 경감시키도록 상기 구동 신호에 마찰 보상 성분을 부가함으로써, 상기 구동 신호를 변경시킬 수 있다.
다른 실시형태에 있어서, 상기 제2 자세는 상기 수동식 운동의 속도가 임계값 속도 미만인 것을 판정함으로써 결정될 수 있다. 또한, 상기 제2 자세는 또한 상기 수동식 운동을 방지하는 일없이 운동 방향의 반전을 가능하게 해주도록, 상기 수동식 운동의 속도가 일정한 임계값 체류 시간 동안 상기 임계값 속도 미만으로 유지되는 것을 판정함으로써 결정될 수 있다.
또 다른 실시형태에 있어서, 상기 로봇 시스템을 구성하는 방법은상기 소정의 관절운동 임계값 미만인 매니퓰레이터에 대한 제3 수동식 조작력에 응답하여, 상기 제2 자세로부터의 상기 링키지의 수동식 운동을 방지하도록, 상기 제2 자세에서 구동 신호에 의해 상기 링키지를 구동시키는 단계를 포함한다.
상기 예시의 방법은 수술 로봇 시스템을 구성하는 데 사용될 수 있다. 예컨대, 상기 링키지는 근위 베이스 및 상기 근위 베이스와의 사이에 배치된 조인트를 구비한 플랫폼을 가지는 가진 셋업 구조부일 수 있다. 상기 플랫폼은 복수의 수술용 매니퓰레이터를 지지할 수 있고, 각각의 매니퓰레이터는 수술 기구를 분리가능하게 수용하도록 구성된 기구 홀더일 수 있다. 상기 수동식 운동은 수술 부위에 대한 상기 복수의 매니퓰레이터의 포지션을 변경시키는 운동일 수 있다. 또 다른 예에서, 상기 링키지는 수술 기구를 분리가능하게 수용하도록 구성된 홀더를 가지는 수술용 매니퓰레이터 내에 포함될 수 있다. 상기 수술용 매니퓰레이터는 또한 캐뉼라를 분리가능하게 수용하도록 구성된 캐뉼라 인터페이스를 포함할 수 있다. 상기 매니퓰레이터는 또한 최소 침습 수술 개구부 내에서 상기 기구의 엔드 이펙터를 조작하기 위해 상기 캐뉼라에 인접한 개구부 내에서 상기 기구의 샤프트를 피벗운동시키도록 구성될 수 있다. 상기 로봇 시스템을 구성하는 방법은 또한 상기 캐뉼라 인터페이스에 장착되어 있는 캐뉼라에 응답하여, 상기 소정의 관절운동 임계값을 초과하는 수동식 조작력에 의한 조인트의 수동식 관절운동을 방지하는 단계를 포함할 수 있다.
또 다른 양태에 있어서, 로봇 시스템이 제공된다. 상기 로봇 시스템은 조인트를 가진 링키지, 상기 링키지에 연결된 구동 또는 브레이크 시스템, 및 상기 구동 또는 브레이크 시스템에 연결된 프로세서를 포함하고 있다. 상기 프로세서는 소정의 관절운동 임계값 미만인 상기 링키지에 대한 제1 수동식 조작력에 응답하여, 제1 자세로부터의 상기 링키지의 수동식 관절운동을 방지하도록, 상기 구동 또는 브레이크 시스템에 신호를 전달하도록 구성될 수 있다. 상기 프로세서는 상기 소정의 관절운동 임계값을 초과하여 상기 링키지를 관절운동시키는 제2 수동식 조작력에 응답하여 상기 신호를 변경시키도록 구성될 수 있다. 이 변경된 신호는 상기 제1 자세로부터 제2 자세를 향한 상기 링키지의 수동식 운동을 가능하게 해주도록 구성될 수 있다. 상기 프로세서는 또한 상기 링키지의 상기 수동식 운동에 응답하여 상기 제2 자세를 결정할 수 있고, 상기 제2 자세로부터의 상기 링키지의 수동식 운동을 방지하도록, 상기 구동 시스템에 신호를 전달할 수 있다.
또 다른 예시의 실시혀태에 있어서, 상기 로봇 시스템은 또한 상기 조인트에 연결된 조인트 센서를 포함하고 있다. 상기 조인트 센서는 상기 조인트에 가해지는 상기 제1 수동식 조작력의 제1 토크를 감지하도록 구성될 수 있다. 상기 프로세서는 상기 제1 토크에 대항하는 상기 링키지에 대한 대항 토크를 가하여 상기 링키지를 상기 제1 자세로 되돌아가게 가압하기 위한 신호를 결정하도록 구성될 수 있다. 특정 실시형태에 있어서, 상기 구동 또는 브레이크 시스템은 구동 시스템을 포함할 수 있다. 또한, 상기 조인트 센서는 상기 조인트에 가해지는 상기 제2 수동식 조작력의 제2 토크를 상기 프로세서에 전달하도록 구성될 수 있다. 상기 프로세서는 또한 상기 제2 토크를 이용하여 상기 제2 조작력이 상기 소정의 관절운동 임계값을 초과하는지를 판정하도록 구성될 수 있다. 예컨대, 상기 프로세서는 상기 제2 토크가 임계값 토크를 초과하는지의 여부를 판정함으로써, 상기 제2 조작력이 상기 소정의 관절운동 임계값을 초과하는지를 판정하도록 구성될 수 있다. 상기 소정의 관절운동 임계값을 초과하는 상기 제2 조작력에 응답하여, 상기 프로세서는 상기 제1 토크가 매니퓰레이터를 수동식으로 이동시키기에 충분하도록 상기 대항 토크를 감소시키기 위해 상기 구동 신호를 변경시킬 수 있다.
몇몇의 실시형태에 있어서, 상기 로봇 시스템의 상기 신호는 구동 신호를 포함할 수 있고, 상기 프로세서는 상기 소정의 관절운동 임계값을 초과하는 상기 제2 조작력에 응답하여, 상기 제2 자세를 향한 상기 수동식 운동을 위해 상기 링키지의 마찰을 경감시키도록 상기 구동 신호에 마찰 보상 성분을 부가함으로써, 상기 구동 신호를 변경시키도록 구성될 수 있다.
상기 프로세서는 임계값 속도 미만인 상기 수동식 운동의 속도에 응답하여 상기 제2 자세를 결정하도록 구성될 수 있다. 상기 프로세서는 또한 상기 수동식 운동을 방지하는 일없이 수동식 운동 방향의 반전을 가능하게 해주도록, 상기 수동식 운동의 속도가 일정한 임계값 체류 시간 동안 상기 임계값 속도 미만인지를 판정함으로써 상기 제2 자세를 결정하도록 구성될 수 있다. 상기 프로세서는 또한 상기 소정의 관절운동 임계값 미만인 매니퓰레이터에 대한 제3 수동식 조작력에 응답하여, 상기 제2 자세로부터의 상기 링키지의 수동식 운동을 방지하도록 구성될 수 있다.
상기 예시의 시스템은 수술 로봇 시스템일 수 있다. 예컨대, 상기 링키지는 근위 베이스 및 상기 근위 베이스와의 사이에 배치된 조인트를 구비한 플랫폼을 가지는 가진 셋업 구조부일 수 있다. 상기 플랫폼은 복수의 수술용 매니퓰레이터를 지지할 수 있고, 각각의 매니퓰레이터는 수술 기구를 분리가능하게 수용하도록 구성된 기구 홀더일 수 있다. 상기 수동식 운동은 수술 부위에 대한 상기 복수의 매니퓰레이터의 포지션을 변경시키는 운동일 수 있다. 또 다른 예에서, 상기 링키지는 수술 기구를 분리가능하게 수용하도록 구성된 홀더를 가지는 수술용 매니퓰레이터 내에 포함될 수 있다. 상기 수술용 매니퓰레이터는 또한 캐뉼라를 분리가능하게 수용하도록 구성된 캐뉼라 인터페이스를 포함할 수 있다. 상기 매니퓰레이터는 또한 최소 침습 수술 개구부 내에서 상기 기구의 엔드 이펙터를 조작하기 위해 상기 캐뉼라에 인접한 개구부 내에서 상기 기구의 샤프트를 피벗운동시키도록 구성될 수 있다. 상기 시스템은 또한 상기 캐뉼라 인터페이스에 장착되어 있는 캐뉼라에 응답하여, 상기 소정의 관절운동 임계값을 초과하는 수동식 조작력에 의한 조인트의 수동식 관절운동을 방지하는 과정을 포함할 수 있다.
또 다른 양태에 있어서, 로봇 수술 시스템이 제공된다. 상기 로봇 수술 시스템은 조인트를 가진 링키지, 상기 링키지에 연결된 구동 시스템, 상기 조인트에 연결된 토크 센서 시스템, 및 상기 토크 센서 시스템을 상기 구동 시스템과 연결시킨 프로세서를 포함하고 있다. 상기 조인트는 근위 베이스와 기구 홀더 사이에 배치될 수 있다. 상기 기구 홀더는 수술 기구를 분리가능하게 지지하도록 구성될 수 있다. 상기 프로세서는 소정의 관절운동 임계값 미만인 감지된 토크에 응답하여, 제1 구성으로부터의 상기 조인트의 수동식 관절운동을 방지하도록, 상기 구동 시스템에 구동 신호를 전달하도록 구성되어 있다. 상기 소정의 관절운동 임계값을 초과하는 상기 감지된 토크에 응답하여, 상기 프로세서는 상기 관절운동 임계값보다 작은 운동 토크를 이용하여 상기 제1 구성으로부터 제2 구성을 향한 상기 조인트의 수동식 운동을 가능하게 해주도록 상기 구동 신호를 변경시킬 수 있다. 임계값 속도 미만인 상기 수동식 운동의 속도에 응답하여, 상기 프로세서는 상기 제2 구성을 결정할 수 있다. 상기 프로세서는 또한 소정의 관절운동 임계값 미만인 감지된 토크에 응답하여, 상기 제2 구성으로부터의 상기 링키지의 수동식 운동을 방지하도록, 상기 구동 시스템에 구동 신호를 전달하도록 구성될 수 있다.
또 다른 양태에 있어서, 로봇 시스템을 구성하는 방법이 제공된다. 상기 방법은 수동식 조작 중에 제1 링키지 자세 및 제2 링키지 자세에서의 링키지의 제1 디텐트 및 제2 디텐트를 각각 시뮬레이트(simulate)하도록 로봇 어셈블리의 링키지를 이동시키도록 로봇 어셈블리를 구동시키는 단계를 포함한다. 상기 방법은 또한 상기 제2 자세로의 상기 링키지의 수동식 운동에 응답하여 상기 제2 자세를 결정하는 단계를 포함한다.
본 발명의 특성들 및 장점들의 보다 완전한 이해를 위해, 이어지는 상세한 설명과 첨부도면의 참조가 이루어져야 한다. 본 발명의 다른 양태들, 목적들 및 장점들은 도면 및 이어지는 상세한 설명으로부터 명백해질 것이다.
도 1은 다수의 실시형태에 따르는, 수술을 수행하기 위해 사용되는 최소 침습 로봇 수술 시스템의 평면도이다.
도 2는 다수의 실시형태에 따르는 로봇 수술 시스템용 외과의 제어 콘솔의 사시도이다.
도 3은 다수의 실시형태에 따르는 로봇 수술 시스템 전자장치 카트의 사시도이다.
도 4는 다수의 실시형태에 따르는 로봇 수술 시스템을 다이어그램으로 도시하고 있다.
도 5a는 다수의 실시형태에 따르는 로봇 수술 시스템의 환자측 카트(수술 로봇)의 부분도이다.
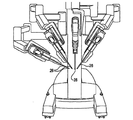
도 5b는 다수의 실시형태에 따르는 로봇 수술 툴의 정면도이다.
도 6은 다수의 실시형태에 따르는 로봇 수술 시스템의 사시 개략도이다.
도 7은 다수의 실시형태에 따르는 또 다른 로봇 수술 시스템의 사시 개략도이다.
도 8은 도 7의 개략도에 부합하는, 다수의 실시형태에 따르는 로봇 수술 시스템을 도시하고 있다.
도 9는 도 8의 로봇 수술 시스템의 배향 플랫폼에 대한 셋업 링키지들의 회전 배향 한계를 도시하고 있다.
도 10은 다수의 실시형태에 따르는 로봇 수술 시스템용 붐 어셈블리의 회전 한계와 관련된 무게 중심 도면이다.
도 11은 수술을 위해 로봇 수술 시스템을 준비하는 방법을 개략적으로 도시하고 있는 플로 차트이다.
도 2는 다수의 실시형태에 따르는 로봇 수술 시스템용 외과의 제어 콘솔의 사시도이다.
도 3은 다수의 실시형태에 따르는 로봇 수술 시스템 전자장치 카트의 사시도이다.
도 4는 다수의 실시형태에 따르는 로봇 수술 시스템을 다이어그램으로 도시하고 있다.
도 5a는 다수의 실시형태에 따르는 로봇 수술 시스템의 환자측 카트(수술 로봇)의 부분도이다.
도 5b는 다수의 실시형태에 따르는 로봇 수술 툴의 정면도이다.
도 6은 다수의 실시형태에 따르는 로봇 수술 시스템의 사시 개략도이다.
도 7은 다수의 실시형태에 따르는 또 다른 로봇 수술 시스템의 사시 개략도이다.
도 8은 도 7의 개략도에 부합하는, 다수의 실시형태에 따르는 로봇 수술 시스템을 도시하고 있다.
도 9는 도 8의 로봇 수술 시스템의 배향 플랫폼에 대한 셋업 링키지들의 회전 배향 한계를 도시하고 있다.
도 10은 다수의 실시형태에 따르는 로봇 수술 시스템용 붐 어셈블리의 회전 한계와 관련된 무게 중심 도면이다.
도 11은 수술을 위해 로봇 수술 시스템을 준비하는 방법을 개략적으로 도시하고 있는 플로 차트이다.
이하의 설명에서, 본 발명의 여러 가지 실시형태들이 설명될 것이다. 설명을 목적으로 하여, 특정 구성들 및 세부사항들이 실시형태들의 완전한 이해를 제공하기 위해 기술된다. 하지만, 본 발명은 특정 세부사항들 없이 실시될 수 있다는 것도 당업자에게 명백할 것이다. 또한, 잘 알려진 세부형상부들은 설명되는 실시형태를 불분명하게 만들지 않도록 하기 위해 생략되거나 단순화될 수 있을 것이다.
여기에 기술되는 기구학적 링키지 구조와 제어 시스템은 특히 시스템 사용자가 시술 로봇 구조부를 특정 환자에 배열하는 것을 도와주는 데 특히 유익하다. 치료 중에 조직 등과 상호작용하도록 사용되는 능동적으로 구동되는 매니퓰레이터와 더불어, 로봇 수술 시스템은 매니퓰레이터 구조부를 지지하고 수술 작업 부위와 정렬시키는 것을 돕도록 구성되어 있는 하나 이상의 기구학적 링키지 시스템을 가질 수 있다. 이러한 셋업 시스템은 수동식으로 관절운동된 다음 매니퓰레이터가 치료상으로 사용되는 동안 소정의 구성으로 잠금되도록, 능동적으로 구동될 수 있거나 피동형일 수 있다. 피동형 셋업 기구학적 시스템은 치수, 중량, 복잡성 및 비용에 있어 장점을 가질 수 있다. 유감스럽게도, 각각의 환자의 조직들을 치료하기 위해서는 복수의 매니퓰레이터가 사용될 수 있으며, 복수의 매니퓰레이터 각각은 해당 매니퓰레이터에 의해 지지되는 기구가 그 작업 공간 전반에 걸쳐 소정의 운동을 가지도록 해주기 위한 정확한 포지셔닝에 의해 독립적으로 유용할 수 있고, 인접한 매니퓰레이터의 상대 위치에 있어서의 작은 변화가 매니퓰레이터 간의 상호 작용에 중대한 영향을 미칠 수 있다(불량하게 포지셔닝된 매니퓰레이터들은 잠재적으로 충돌하거나 그들의 운동의 범위 및/또는 용이성을 크게 감소시킬 수 있다). 따라서, 로봇 시스템을 수술을 위한 준비 상태로 신속하게 배열시키고자 하는 도전 과제가 중요할 수 있다.
한 가지 선택적 방법은 다수의 매니퓰레이터를 단일 플랫폼에 장착하는 것이며, 이 매니퓰레이터 지지 플랫폼은 종종 배향 플랫폼이라고 불려진다. 이 배향 플랫폼은 능동적으로 구동되는 지지 링키지(종종 여기에서 셋업 구조부라고 불려지며, 일반적으로 셋업 구조부 링키지 등을 가진다)에 의해 지지될 수 있다. 이 시스템은 또한 배향 플랫폼을 지지하는 로봇 셋업 구조부의 전동식 축선들(motorized axes)을 제공하고, 사용자가 그 축선들을 원하는 대로 독립된 형태로 능동적으로 구동시키는 것을 가능하게 해주는 몇 가지 종류의 조이스틱이나 버튼 세트에 의해 제어할 수 있다. 이러한 접근법은 일부의 상황에서는 유용하지만 여러 단점들에 의해 어려움을 겪을 수 있다. 특히, 복잡한 시스템의 모든 요소들을 위한 하나의 구동 버튼을 배치하여 시스템에 접근하는 사용자가 각각의 요소의 모든 가능한 구성에 액세스 가능하도록 하는 것은 어려울 수 있다. 브레이크 또는 구동 시스템을 해제하는 데 개별의 클러치 버튼(clutch button)들이 사용될 수도 있겠지만, 여러 가지 기능들을 갖는 버튼들 사이에서 혼란의 가능성이 존재할 수 있다. 또한, 수술 팀 중의 멸균 부원과 비멸균 부원 모두가 일부의 조인트 또는 링키지를 관절운동시키기를 원할 수 있다(무균 영역 내외의 여러 위치들을 붙잡는 등에 의해). 따라서, 보다 직관적이고 유연성 있는 사용자 인터페이스가 바람직할 것이다. 이는 특히 복합 4분면 수술(multi-quadrant surgery)에 사용되거나, 복수의 수술용 매니퓰레이터를 지지하고 수술대 또는 다른 지지대 위의 환자에 대해 매니퓰레이터들을 배향시키도록 적어도 대략 수직방향으로 뻗어 있는 축선 둘레로 피벗운동할 수 있는 구조부를 위한 배향 플랫폼인 경우에 그러하다.
최소 침습 로봇 수술
이제 동일한 도면부호가 여러 도면에 걸쳐 동일한 부분을 나타내고 있는 도면을 참조하면, 도 1은 일반적으로 수술대(14) 위에 누워 있는 환자(12)에 대해 최소 침습 진단 또는 수술 과정을 수행하기 위해 사용되는 최소 침습 로봇 수술(MIRS) 시스템(10)의 평면도이다. 이 시스템은 수술 과정 중에 외과의(18)에 의해 사용되는 외과의 콘솔(16)을 포함할 수 있다. 한 명 이상의 보조원(20)도 이 수술 과정에 참여할 수 있다. MIRS 시스템(10)은 또한 환자측 카트(22)(수술 로봇) 및 전자장치 카트(24)를 포함할 수 있다. 환자측 카트(22)는, 외과의(18)가 콘솔(16)을 통해 수술 부위를 보고 있는 동안에, 환자(12)의 신체 내의 최소 침습 절개부를 통해 적어도 하나의 제거가능하게 결합된 툴 어셈블리(26)(이하 간단히 "툴"이라 함)를 조작할 수 있다. 수술 부위의 영상이 환자측 카트(22)에 의해 배향 조작될 수 있는 입체 내시경과 같은 내시경(28)에 의해 얻어질 수 있다. 전자장치 카트(24)가 외과의 콘솔(16)을 통한 외과의(18)에게 제공되는 후속적인 화면표시를 위해 수술 부위의 영상을 처리하는 데 사용될 수 있다. 한번에 사용되는 수술 툴(26)의 개수는 일반적으로 무엇보다 진단 또는 수술 절차 및 수술실 내의 공간 제약에 좌우된다. 수술 과정 중에 사용되는 하나 이상의 툴(26)을 교체하는 것이 필요한 경우에는, 보조원(20)이 환자측 카트(22)로부터 툴(26)을 제거하고, 수술실 내의 트레이(30)로부터 또 다른 툴(26)로 교체할 수 있다.
도 2는 외과의 콘솔(16)의 사시도이다. 외과의 콘솔(16)은 외과의(18)에게 깊이 지각을 가능하게 해주는 수술 부위의 통합 입체 뷰(coordinated stereo view)를 제공하는 좌안 디스플레이(32) 및 우안 디스플레이(34)를 구비하고 있다. 콘솔(16)은 또한 환자측 카트(22)(도 1 도시)가 하나 이상의 툴을 조작하게 만드는 하나 이상의 입력 제어 장치(36)를 구비하고 있다. 입력 제어 장치(36)는 외과의에게 원격 현장감 또는 외과의가 툴(26)을 직접 제어한다는 강한 느낌을 가지도록 입력 제어 장치(36)가 툴(26)과 일체라는 지각을 제공하기 위해 연계된 툴(26)(도 1 도시)과 동일한 자유도를 제공할 수 있다. 이를 위해, 포지션, 힘 및 촉각 피드백 센서들(도시 안됨)이 툴(26)로부터의 포지션, 힘 및 촉각 감각을 입력 제어 장치(36)를 통해 외과의의 손으로 다시 전달하기 위해 채용될 수 있다.
외과의 콘솔(16)은 일반적으로 외과의가 수술 과정을 직접 모니터하고, 필요한 경우 직접 현장에 위치하고, 전화나 다른 통신 매체를 통하기보다 직접 보조원에게 이야기할 수 있도록 환자와 동일한 방에 배치된다. 하지만, 외과의는 원격 수술 과정을 허용하는 다른 방, 완전히 다른 건물 또는 환자로부터의 다른 원격지에 위치될 수도 있다.
도 3은 전자장치 카트(24)의 사시도이다. 전자장치 카트(24)는 내시경(28)과 결합될 수 있고, 외과의 콘솔 위의 외과의에게 제공되는 후속적인 화면표시, 또는 근처 및/또는 원격지에 배치되는 또 다른 적합한 디스플레이 상의 후속적인 화면표시 등을 위해 촬영된 영상을 처리하는 프로세서를 구비하고 있다. 예컨대, 입체 내시경이 사용되는 경우, 전자장치 카트(24)는 외과의에게 수술 부위의 통합 입체 영상(coordinated stereo image)을 제공하도록 촬영된 영상을 처리할 수 있다. 이러한 입체 영상의 통합(coordination)은 양쪽 영상들 간의 정렬을 포함할 수 있고, 입체 내시경의 입체 작동 거리를 조절하는 것을 포함할 수 있다. 또 다른 예로서, 영상 처리는 광학 수차와 같은 영상 촬영 장치의 촬영 오차를 보정하기 위한 선결정된 카메라 보정 파라미터의 이용을 포함할 수 있다.
도 4는 로봇 수술 시스템(50)(도 1의 MIRS 시스템(10)과 같은)을 다이어그램으로 도시하고 있다. 전술한 바와 같이, 외과의 콘솔(52)(도 1의 외과의 콘솔(16)과 같은)은 외과의에 의해 최소 침습 수술 과정 중에 환자측 카트(수술 로봇)(54)(도 1의 환자측 카트(22)와 같은)를 제어하도록 사용될 수 있다. 환자측 카트(54)는 수술 부위의 영상을 촬영하고 촬영된 영상을 전자장치 카트(56)(도 1의 전자장치 카트(24)와 같은)로 출력하기 위해 입체 내시경과 같은 촬영 장치를 사용할 수 있다. 전술한 바와 같이, 전자장치 카트(56)는 임의의 후속적인 화면표시 전에 다양한 방법으로 촬영된 영상을 처리할 수 있다. 예컨대, 전자장치 카트(56)는 결합된 영상을 외과의 콘솔(52)을 통해 외과의에게 화면표시하기 전에 촬영된 영상들을 가상 제어 인터페이스로 중첩시킬 수 있다. 환자측 카트(54)는 촬영된 영상을 전자장치 카트(56) 외부에서 처리하기 위해 출력할 수 있다. 예컨대, 환자측 카트(54)는 촬영된 영상을 처리하기 위해 사용될 수 있는 프로세서(58)로 촬영된 영상을 출력할 수 있다. 영상은 또한 촬영된 영상을 공동적으로, 순차적으로 그리고/또는 공동과 순차의 조합으로 처리하도록 함께 결합될 수 있는 전자장치 카트(56)와 프로세서(58)의 조합에 의해 처리될 수도 있다. 하나 이상의 별개의 디스플레이(60)가 또한 수술 부위의 영상이나 다른 관련 영상과 같은 영상의 현지 및/또는 원격 디스플레이를 위해 프로세서(58) 및/또는 전자장치 카트(56)와 결합될 수도 있다.
프로세서(58)는 일반적으로 하드웨어와 소프트웨어의 조합을 포함할 것이며, 소프트웨어는 여기에 기능적으로 설명되는 제어의 방법 단계들을 수행하기 위한 컴퓨터 판독가능 코드 명령을 구현한 실감형 매체를 포함한다. 하드웨어는 일반적으로 같은 장소에 배치될 수 있지만 종종 구성요소들을 여기에 설명되는 로봇 구조부들 중에 분포시키는 하나 이상의 데이터 처리 보드를 포함한다. 소프트웨어는 종종 비휘발성 매체를 포함할 것이며, 또한 모놀리식 코드를 포함할 수도 있지만, 더 일반적으로는 다수의 서브루틴을 포함할 것이며, 다양한 분산된 데이터 처리 아키텍처들에서 선택적으로 운용된다.
도 5a 및 5b는 각각 환자측 카트(22) 및 수술 툴(62)을 도시하고 있다. 수술 툴(62)은 수술 툴(26)의 한 예이다. 도시된 환자측 카트(22)는 3개의 수술 툴(26) 및 수술 부위의 영상의 촬영을 위해 사용되는 입체 내시경과 같은 촬영 장치(28)의 조작을 제공한다. 조작은 다수의 로봇 조인트를 갖는 로봇 기구에 의해 제공된다. 촬영 장치(28) 및 수술 툴(26)은 절개부의 크기를 최소화하기 위해 기구학적 원격 중심이 절개부에 유지되도록 환자의 절개부를 통해 포지셔닝되고 조작될 수 있다. 수술 부위의 영상은 수술 툴(26)의 원위 단부가 촬영 장치(28)의 시계 내에 포지셔닝될 때는 수술 툴(26)의 원위 단부의 영상을 포함할 수 있다.
수술 툴(26)은 절개부, 자연적 인체 구멍, 경피적 침투공 등과 같은 최소 침습 액세스 구멍을 통해 튜브형 캐뉼라(64)를 삽입함으로써 환자 내부로 삽압된다. 캐뉼라(64)는 로봇 매니퓰레이터 암에 장착되고, 수술 툴(26)의 샤프트가 캐뉼라의 관강을 통과한다. 매니퓰레이터 암은 캐뉼라가 장착 완료되었다는 것을 지시하는 신호를 전달할 수 있다.
로봇 수술 시스템 및 모듈형 매니퓰레이터 지지부
도 6은 다수의 실시형태에 따르는 로봇 수술 시스템(70)의 사시 개략도이다. 수술 시스템(70)은 장착 베이스(72), 지지 링키지(74), 배향 플랫폼(76), 복수의 외측 셋업 링키지(78)(2개 도시됨), 복수의 내측 셋업 링키지(80)(2개 도시됨), 및 복수의 수술 기구 매니퓰레이터(82)를 포함하고 있다. 매니퓰레이터(82)의 각각은 매니퓰레이터(82)에 장착되어 삽입 축선을 따라 환자 내부로 삽입가능한 수술 기구를 선택적으로 관절운동시키도록 작동가능하다. 매니퓰레이터(82)의 각각은 셋업 링키지(78, 80) 중의 하나에 부착되어 지지된다. 외측 셋업 링키지(78)의 각각은 제1 셋업 링키지 조인트(84)에 의해 배향 플랫폼(76)에 회전가능하게 연결되어 지지된다. 내측 셋업 링키지(80)의 각각은 배향 플랫폼(76)에 고정 부착되어 지지된다. 배향 플랫폼(76)은 지지 링키지(74)에 회전가능하게 연결되어 지지된다. 또한, 지지 링키지(74)는 장착 베이스(72)에 고정 부착되어 지지된다.
다수의 실시형태에 있어서, 장착 베이스(72)는 이동가능하며 플로어에 지지되어, 예컨대 수술실 내에서의 전체 수술 시스템(70)의 선택적인 리포지셔닝을 가능하게 해준다. 장착 베이스(72)는 조향가능한 휠 어셈블리 및/또는 선택적인 리포지셔닝과 더불어 선택된 포지션으로부터의 장착 베이스(72)의 운동을 선택적으로 방지하는 것 모두를 제공하는 임의의 다른 적합한 지지 피처를 구비할 수 있다. 장착 베이스(72)는 또한 예컨대 천장 장착부, 고정된 플로어/받침대 장착부, 벽 장착부 또는 임의의 다른 적합한 장착 표면에 의해 지지되도록 형성된 인터페이스와 같은 다른 적합한 형태부를 가질 수 있다.
지지 링키지(74)는 장착 베이스(72)에 대해 배향 플랫폼(76)을 선택적으로 포지셔닝 및/또는 배향시키도록 작동가능하다. 지지 링키지(74)는 칼럼 베이스(86), 병진운동 가능한 칼럼 부재(88), 쇼울더 조인트(90), 붐 베이스 부재(92), 붐 제1단 부재(94), 붐 제2단 부재(96), 및 리스트 조인트(wrist joint)(98)를 포함하고 있다. 칼럼 베이스(86)는 장착 베이스(72)에 고정 부착된다. 병진운동 가능한 칼럼 부재(88)는 칼럼 베이스(86)에 대한 병진운동을 위해 칼럼 베이스(86)에 슬라이드 가능하게 연결되어 있다. 다수의 실시형태에 있어서, 병진운동 가능한 칼럼 부재(88)는 수직방향으로 배향된 축선을 따라 칼럼 베이스(86)에 대해 병진운동한다. 붐 베이스 부재(92)는 쇼울더 조인트(90)에 의해 병진운동 가능한 칼럼 부재(88)에 회전가능하게 연결된다. 쇼울더 조인트(90)는 칼럼 베이스(86)와 장착 베이스(72)에 대해 고정된 각도 배향을 가지는 병진운동 가능한 칼럼 부재(88)에 대해 수평방향 평면 내에서 붐 베이스 부재(92)를 선택적으로 배향시키도록 작동가능하다. 붐 제1단 부재(94)는 붐 베이스 부재(92)에 대해 수평방향으로 선택적으로 병진운동 가능하고, 이 수평방향은, 다수의 실시형태에 있어, 붐 베이스 부재(92) 및 붐 제1단 부재(94)의 양자 모두와 정렬된다. 붐 제2단 부재(96)도 마찬가지로 붐 제1단 부재(94)에 대해 수평방향으로 선택적으로 병진운동 가능하고, 이 수평 방향은, 다수의 실시형태에 있어, 붐 제1단 부재(94) 및 붐 제2단 부재(96)와 정렬된다. 따라서, 지지 링키지(74)는 쇼울더 조인트(90)와 붐 제2단 부재(96)의 원위 단부 사이의 거리를 선택적으로 설정하도록 작동가능하다. 리스트 조인트(98)는 붐 제2단 부재(96)의 원위 단부를 배향 플랫폼(76)에 회전가능하게 연결시킨다. 리스트 조인트(98)는 장착 베이스(72)에 대한 배향 플랫폼(76)의 각도 배향을 선택적으로 설정하도록 작동가능하다.
셋업 링키지(78, 80)의 각각은 배향 플랫폼(76)에 대해 연계된 매니퓰레이터(82)를 선택적으로 포지셔닝 및/또는 배향시키도록 작동가능하다. 셋업 링키지(78, 80)의 각각은 셋업 링키지 베이스 링크(100), 셋업 링키지 확장 링크(102), 셋업 링키지 평행사변형 링키지부(104), 셋업 링키지 수직방향 링크(106), 제2 셋업 링키지 조인트(108), 및 매니퓰레이터 지지 링크(110)를 포함하고 있다. 외측 셋업 링키지(78)의 셋업 링키지 베이스 링크(100)의 각각은 제1 셋업 링키지 조인트(84)의 작동을 통해 배향 플랫폼(76)에 대해 선택적으로 배향될 수 있다. 도시된 실시형태에 있어서, 내측 셋업 링키지(80)의 셋업 링키지 베이스 링크(100)의 각각은 배향 플랫폼(76)에 고정 부착된다. 내측 셋업 링키지(80)의 각각은 외측 셋업 링키지와 마찬가지로 추가적인 제1 셋업 링키지 조인트(84)를 통해 배향 플랫폼(76)에 회전가능하게 부착될 수도 있다. 셋업 링키지 확장 링크(102)의 각각은 연계된 셋업 링키지 베이스 링크(100)에 대해 수평 방향으로 병진운동 가능하고, 이 수평방향은, 다수의 실시형태에 있어, 연계된 셋업 링키지 베이스 링크 및 셋업 링키지 확장 링크(102)와 정렬된다. 셋업 링키지 평행사변형 링키지부(104)의 각각은 셋업 링키지 수직방향 링크(106)를 수직방향으로 배향된 상태로 유지하면서 셋업 링키지 수직방향 링크(106)를 수직방향으로 선택적으로 병진운동시키도록 작동가능하게 형성되어 있다. 예시의 실시형태에 있어서, 셋업 링키지 평행사변형 링키지부(104)의 각각은 제1 평행사변형 조인트(112), 연결 링크(114), 및 제2 평행사변형 조인트(116)를 포함하고 있다. 제1 평행사변형 조인트(112)는 연결 링크(114)를 셋업 링키지 확장 링크(102)에 회전가능하게 연결시킨다. 제2 평행사변형 조인트(116)는 셋업 링키지 수직방향 링크(106)를 연결 링크(114)에 회전가능하게 연결시킨다. 제1 평행사변형 조인트(112)는, 셋업 링키지 확장 링크(102)에 대한 연결 링크(114)의 회전이 연결 링크(114)에 대한 셋업 링키지 수직방향 링크(106)의 대항하는 회전과 조화되어, 셋업 링키지 수직방향 링크(106)를 수직방향으로 배향된 상태로 유지하면서 셋업 링키지 수직방향 리크106)가 수직방향으로 선택적으로 병진운동되도록, 제2 평행사변형 조인트(116)에 회전가능하게 결속된다. 제2 셋업 링키지 조인트(108)는 셋업 링키지 수직방향 링크(106)에 대해 매니퓰레이터 지지 링크(110)를 선택적으로 배향시키도록 작동가능하고, 이에 의해 셋업 링키지 수직방향 링크(106)에 대해 연계된 매니퓰레이터(82)를 선택적으로 배향시킨다.
도 7은 다수의 실시형태에 따르는 로봇 수술 시스템(120))의 사시 개략도이다. 수술 시스템(120)은 도 6의 수술 시스템(70)의 구성요소들과 유사한 구성요소들을 포함하고 있기 때문에, 유사한 구성요소에 대해서는 동일한 도면부호가 사용되고, 전술한 유사한 구성요소의 대응하는 설명이 수술 시스템(120)에도 적용될 수 있어 반복을 피하기 위해 그 설명을 여기서는 생략하기로 한다. 수술 시스템(120)은 장착 베이스(72), 지지 링키지(122), 배향 플랫폼(124), 복수의 셋업 링키지(126)(4개가 도시됨), 및 복수의 수술 기구 매니퓰레이터(82)를 포함하고 있다. 매니퓰레이터(82)의 각각은 매니퓰레이터(82)에 장착된 수술 기구를 선택적으로 관절운동시키도록 작동가능하고, 삽입 축선을 따라 환자 내로 삽입가능하다. 매니퓰레이터(82)의 각각은 셋업 링키지(126) 중의 하나에 부착되어 지지된다. 셋업 링키지(126)의 각각은 제1 셋업 링키지 조인트(84)에 의해 배향 플랫폼(124)에 회전가능하게 연결되어 지지된다. 배향 플랫폼(124)은 지지 링키지(122)에 회전가능하게 연결되어 지지된다. 또한, 지지 링키지(122)는 장착 베이스(72)에 고정 부착되어 지지된다.
지지 링키지(122)는 장착 베이스(72)에 대해 배향 플랫폼(124)을 선택적으로 포지셔닝 및/또는 배향시키도록 작동가능하다. 지지 링키지(122)는 칼럼 베이스(86), 병진운동 가능한 칼럼 부재(88), 쇼울더 조인트(90), 붐 베이스 부재(92), 붐 제1단 부재(94), 및 리스트 조인트(98)를 포함하고 있다. 지지 링키지(122)는 쇼울더 조인트(90)와 붐 제1단 부재(94)의 원위 단부 사이의 거리를 선택적으로 설정하도록 작동가능하다. 리스트 조인트(98)는 붐 제1단 부재(94)의 원위 단부를 배향 플랫폼(124)에 회전가능하게 연결시킨다. 리스트 조인트(98)는 장착 베이스(72)에 대한 배향 플랫폼(124)의 각도 배향을 선택적으로 설정하도록 작동가능하다.
셋업 링키지(126)의 각각은 배향 플랫폼(124)에 대해 연계된 매니퓰레이터(82)를 선택적으로 포지셔닝 및/또는 배향시키도록 작동가능하다. 셋업 링키지(126)의 각각은 셋업 링키지 베이스 링크(100), 셋업 링키지 확장 링크(102), 셋업 링키지 수직방향 링크(106), 제2 셋업 링키지 조인트(108), 토네이도 기구 지지 링크(128), 및 토네이도 기구(tornado mechanism)(130)를 포함하고 있다. 셋업 링키지(126)의 셋업 링키지 베이스 링크(100)의 각각은 연계된 제1 셋업 링키지 조인트(84)의 작동을 통해 배향 플랫폼(124)에 대해 선택적으로 배향될 수 있다. 셋업 링키지 수직방향 링크(106)의 각각은 연계된 셋업 링키지 확장 링크(102)에 대해 수직방향으로 선택적으로 병진운동 가능하다. 제2 셋업 링키지 조인트(108)는 셋업 링키지 수직방향 링크(106)에 대해 토네이도 기구 지지 링크(128)를 선택적으로 배향시키도록 작동가능하다.
토네이도 기구(130)의 각각은 토네이도 조인트(132), 연결 링크(134), 및 매니퓰레이터 지지부(136)를 포함하고 있다. 연결 링크(134)는 매니퓰레이터 지지부(136)를 토네이도 조인트(132)에 고정 연결시킨다. 토네이도 조인트(130)는 매니퓰레이터 지지부(136)를 토네이도 기구 지지 링크(128)에 대해 토네이도 축선(136) 둘레로 회전시키도록 작동가능하다. 토네이도 기구(130)는, 매니퓰레이터(82)의 조작의 원격 중심(RC)이 토네이도 축선(136)과 교차되도록, 매니퓰레이터 지지부(136)를 포지셔닝 및 배향시키도록 형성되어 있다. 따라서, 토네이도 조인트(132)의 작동은 환자에 대해 연계된 조작의 원격 중심(RC)을 이동시키는 일없이 연계된 매니퓰레이터(82)를 환자에 대해 재배향시키도록 이용될 수 있다.
도 8은 도 7의 로봇 수술 시스템(120)의 개략도에 부합하는, 다수의 실시형태에 따르는 로봇 수술 시스템(140)의 간략도이다. 수술 시스템(140)은 도 7의 로봇 수술 시스템(120)에 맞추어져 있기 때문에, 유사한 구성요소에 대해서는 동일한 도면부호가 사용되고, 전술한 유사한 구성요소의 대응하는 설명이 수술 시스템(140)에도 적용될 수 있어 반복을 피하기 위해 그 설명을 여기서는 생략하기로 한다.
지지 링키지(122)는 다수의 셋업 구조부 축선을 따른 지지 링키지(122)의 링크들 간의 상대 운동을 통해 장착 베이스(72)에 대해 배향 플랫폼(124)을 선택적으로 포지셔닝 및 배향시키도록 구성되어 있다. 병진운동 가능한 칼럼 부재(88)는 다수의 실시형태에 있어 수직방향으로 배향되는 제1 셋업 구조부(SUS) 축선(142)을 따라 칼럼 베이스(86)에 대해 선택적으로 리포지셔닝 가능하다. 쇼울더 조인트(90)는 다수의 실시형태에 있어 수직방향으로 배향되는 제2 SUS 축선(144) 둘레로 병진운동 가능한 칼럼 부재(88)에 대해 붐 베이스 부재(92)를 선택적으로 배향시키도록 작동가능하다. 붐 제1단 부재(94)는 다수의 실시형태에 있어 수평방향으로 배향되는 제3 SUS 축선(146)을 따라 붐 베이스 부재(92)에 대해 선택적으로 리포지셔닝 가능하다. 리스트 조인트(98)는 다수의 실시형태에 있어 수직방향으로 배향되는 제4 SUS 축선(148) 둘레로 붐 제1단 부재(94)에 대해 배향 플랫폼(124)을 선택적으로 배향시키도록 작동가능하다.
셋업 링키지(126)의 각각은 다수의 셋업 조인트(SUJ) 축선을 따른 셋업 링키지(126)의 링크들 간의 상대 운동을 통해 배향 플랫폼(124)에 대해 연계된 매니퓰레이터(82)를 선택적으로 포지셔닝 및 배향시키도록 구성되어 있다. 제1 셋업 링키지 조인트(84)의 각각은 다수의 실시형태에 있어 수직방향으로 배향되는 제1 SUJ 축선(150) 둘레로 배향 플랫폼(124)에 대해 연계된 셋업 링키지 베이스 링크(100)를 선택적으로 배향시키도록 작동가능하다. 셋업 링키지 확장 링크(102)의 각각은 다수의 실시형태에 있어 수평방향으로 배향되는 제2 SUJ 축선(152)을 따라 연계된 셋업 링키지 베이스 링크(100)에 대해 선택적으로 리포지셔닝될 수 있다. 셋업 링키지 수직방향 링크(106)의 각각은 다수의 실시형태에 있어 수직방향으로 배향되는 제3 SUJ 축선(154)을 따라 연계된 셋업 링키지 확장 링크(102)에 대해 선택적으로 리포지셔닝될 수 있다. 제2 셋업 링키지 조인트(108)의 각각은 제3 SUJ 축선(154) 둘레로 셋업 링키지 수직방향 링크(106)에 대해 토네이도 기구 지지 링크(128)를 선택적으로 배향시키도록 작동가능하다. 토네이도 조인트(132)의 각각은 연계된 토네이도 축선(138) 둘레로 연계된 매니퓰레이터(82)를 회전시키도록 작동가능하다.
도 9는 다수의 실시형태에 따르는, 배향 플랫폼(124)에 대한 셋업 링키지(126)의 회전 배향 한계를 도시하고 있다. 셋업 링키지(126)의 각각은 배향 플랫폼(124)에 대해 시계방향 한계 배향된 상태로 도시되어 있다. 대응하는 반시계방향 한계 배향은 수직방향으로 배향되는 거울면에 대한 도 9의 거울상으로 나타난다. 도시된 바와 같이, 2개의 내측 셋업 링키지(126)의 각각은 수직방향 기준선(156)에서 한쪽 방향으로 5도로부터 시작하여 수직방향 기준선(156)에서 반대쪽 방향으로 75도까지 배향될 수 있다. 또한, 도시된 바와 같이, 2개의 외측 셋업 링키지의 각각은 수직방향 기준선(156)에서 한쪽 방향으로 15도로부터 시작하여 반대쪽 방향으로 95도까지 배향될 수 있다.
사용 시에, 종종 수술 보조원, 외과의, 기술 보조 또는 기타 사용자가 셋업 구조부 링키지, 셋업 조인트 및/또는 각각의 매니퓰레이터를 포함하여, 수술을 위한 로봇 수술 시스템(140)의 링키지들 중의 일부 또는 전부를 구성하는 것이 바람직할 것이다. 이들 링키지를 구성하는 작업 중에는, 제1단 부재(94)에 대해 리스트 조인트(98)의 수직방향 제4 SUS 축선(148)을 중심으로 배향 플랫폼(124)을 포지셔닝시키는 것이 포함될 것이다. 조인트 구동 모터(121) 및/또는 브레이크 시스템(123)이 리스트 조인트(98)에 연결되고, 하나의 예시의 실시형태에서는 구동기(121)와 브레이크(123)의 양자 모두를 포함한다. 또한, 조인트 센서 시스템이 일반적으로 리스트 조인트(98)의 각도 구성 또는 포지션을 감지할 것이다.
사용을 위한 시스템을 수동식으로 구성하기 위한 하나의 예시의 사용자 인터페이스, 시스템 및 방법이 화살표(127)로 개략적으로 도시한 바와 같은 제4 SUS 축선(148)을 중심으로 한 리스트 조인트(98)의 관절운동에 의한 배향 플랫폼(124)의 수동식 관절운동을 참조하여 여기에 설명될 것이다. 대안적인 셋업 구조부의 하나 이상의 조인트, 하나 이상의 셋업 조인트 또는 매니퓰레이터 링키지의 하나 이상의 조인트를 포함하여, 전체 기구학적 시스템의 대안적인 하나 이상의 조인트를 관절운동시키는 대안적인 실시형태들이 채용될 수 있다는 것을 이해해야 한다. 전동식(motorized) 리스트 조인트를 관절운동시키는 예시의 실시형태의 이용은 사용자가 매니퓰레이터(82)를 효과적으로 포지셔닝시키는 것을 가능하게 해줄 수 있다. 여기에 설명되는 바와 같은 리스트 조인트(98)의 수동식 관절운동은 속도와 사용의 용이성을 개선시킬 수 있는 동시에 매니퓰레이터(82)를 도 5b에 도시된 바와 같은 연계된 캐뉼라(64)에 수동식으로 결합시킨다.
도 10은 다수의 실시형태에 따르는 로봇 수술 시스템(160)용 지지 링키지의 회전 한계와 관련된 무게 중심 도면을 도시하고 있다. 로봇 수술 시스템(160)의 무게 중심(162)을 수술 시스템(160)의 지지 링키지(164)에 대해 최대한 한쪽으로 이동시키도록 로봇 수술 시스템(160)의 구성요소들이 포지셔닝 및 배향되어 있기 때문에, 지지 링키지(164)의 쇼울더 조인트는 장착 베이스의 소정의 안정성 한계를 초과하는 것을 방지하도록 셋업 구조부(SUS) 쇼울더 조인트 축선(166) 둘레로의 지지 구조부(164)의 회전을 제한하도록 구성될 수 있다.
도 11은 리스트 조인트(98)를 관절운동시킴으로써 배향 플랫폼(124)을 포지셔닝시키는 방법을 개략적으로 도시하고 있다. 대략적으로 전술된 바와 같이, 로봇 시스템(140)은 조직 등을 치료하기 위해 마스터 추종 모드(master following mode)로 사용될 수 있다. 로봇 시스템은 일반적으로 추종을 중단하고, 사용자가 제4 SUS 축선(148)을 중심으로 한 소정의 배향으로 배향 플랫폼을 수동식으로 구성하는 것을 가능하게 해주는 구성 모드(configuration mode)를 시작하게 될 것이다(131). 일단 구성 모드가 시작되면, 조인트 센서 시스템에 의해 감지되는 리스트 조인트(98)의 현재의 각도(θC)가 단계 133에서 소정의 각도(θD)로서 설정된다. 캐뉼라가 플랫폼(124)에 의해 지지된 매니퓰레이터들 중의 어느 하나에 장착되면, 시스템은 단계 135를 통해 리스트 조인트의 수동식 운동을 방지하도록 리스트 조인트에 브레이크를 적용하고 구성 모드를 빠져나갈 수 있다.
구성 모드에서, 플랫폼이 리스트 조인트 둘레로 이동하지 않을 때에는, 시스템 프로세서는 일반적으로 설정된 소정의 각도(θD)를 유지하도록 리스트 조인트에 연계된 조인트 모터에 신호를 전달할 될 것이다. 따라서, 시스템이 가볍게 부딪쳐지거나, 밀쳐지거나, 당겨질 때, 리스트 모터는 감지된 조인트 포지션과 소정의 조인트 포지션 간의 차이로 변동하는 오차(E)에 대해 조인트 토크를 적용함으로써 플랫폼을 다시 소정의 각도를 향해 가압할 수 있다.
E = θ-θD
단계 137에서의 소정의 자세를 향한 조인트의 이 구동은 종종 사용자가 링키지 시스템에 대해 충분한 조작력을 가함으로써(139) 리스트 조인트의 서보잉(servoing)을 극복하는 것을 가능하게 해주기 위해 제한될 것이다. 예컨대, 조인트 감지 시스템이 임계값 크기를 넘어서는 조인트의 변위를 지시할 때, 가해진 힘에 대항하도록 모터에 가해지는 토크가 임계값 크기에 도달할 때, 조인트의 원위측으로 링키지 시스템에 가해지는 감지된 힘이 임계값 크기를 초과할 때 등에, 프로세서는 조인트의 관절운동에 대항하기 위한 리스트 조인트의 서보잉을 중단할 수 있다. 몇몇의 실시형태에 있어서, 일정 시간 동안에 임계값을 초과하는 토크에 응답하여 서보잉을 중단하는 등과 같이, 서보잉을 극복하기 위한 조작력 임계값의 시간 요소가 존재할 수 있다. 임계값 토크 또는 힘과 시간과의 사이의 더 복잡한 관계를 포함하는 것, 리스트(또는 다른 관절운동가능한 조인트)에 의해 지지되는 특정 링키지 또는 링키지의 서브세트(subset)에 힘이 가해지는 것을 감지하는 것 등의 다른 선택지가 가능하다. 하나의 예시의 실시형태에 있어서, 배향 플랫폼과 셋업 구조부의 휴지부(rest) 사이의 조인트 센서가 배향 플랫폼에 가해지는 토크를 추정하는 데 사용되는 신호를 제공하고, 조인트 변위와 서보 스티프니스(servo stiffness)가 수술용 암 및/또는 셋업 조인트에 가해지는 외란 토크(disturbance torque)를 추정하는 데 사용된다. 하나의 또 다른 예시의 실시형태에 있어서, 오차 신호는 느린 또는 정상 상태 신호보다 시스템을 일시적인 밀기에 더 민감하게 만들도록 필터링될 수 있다. 이러한 오차 필터링은 트리거(trigger)를 더 민감하게 만들 수 있음과 동시에, 셋업 구조부가 경사면 상에 위치될 때의 트리거 오류를 제한할 수 있다.
사용자가 소정의 관절운동 임계값을 초과하기에 충분한 조작력으로 수술용 매니퓰레이터들, 셋업 조인트 링키지들 중의 하나 이상을 또는 플랫폼을 직접적으로 밀거나 당길 때, 사용자는 서보 제어와 다툴 필요없이 배향 플랫폼을 회전시킬 수 있다. 플랫폼의 사용자 운동에 대항하기 위한 서보잉이 단계 141에서 중단되지만, 구동 신호는 여전히 리스트 모터로 전송될 수 있다. 예컨대, 마찰 보상, 중력 보상, 모멘텀 보상 등이 플랫폼의 수동식 운동 중에 적합한 구동 신호를 적용함으로서 제공될 수 있을 것이다(143). 예시적인 보상 구동 시스템이 나이메이어(Neimeyer) 명의의 "최소 침습 수술 장치에서의 마찰 보상(Friction Compensation in a Minimally Invasive Surgical Apparatus)"이라는 명칭의 미국 특허출원 공개 2009/0326557호, 프리스코(Prisco) 등의 명의의 "수술용 매니퓰레이터의 수동식 포지셔닝에 대해 내부적으로 발생되는 마찰 및 관성 저항을 감소시키기 위한 제어 시스템(Control System for Reducing Internally Generated Frictional and Inertial Resistance to Manual Positioning of a Surgical Manipulator)"이라는 명칭의 미국 특허출원 공개 2011/0009880호 등에 상세히 설명되어 있다. 몇몇의 실시형태에 있어서, 시스템은 서보잉이 중단되었을 때 조인트 운동 한계의 범위만을 단독으로 채용하거나 조인트 운동 한계 외에 구동 신호를 추가적으로 채용할 수 있다. 이러한 운동 한계의 범위는 일방적으로 되는 경우를 제외하고는 사용자가 운동 한계 범위를 넘어서 밀 때 서보잉에 유사하게 대응될 수 있다.
일단 사용자가 소정의 배향에 가까운 리스트로 수동식으로 관절운동시켰다면, 사용자는 플랫폼의 속도를 늦출 것이고, 소정의 구성에 도달했을 때 플랫폼의 운동을 중단시킬 것이다. 시스템은 이러한 장점을 가지며, 조인트 센서가 플랫폼의 운동이 0의 소정의 임계값 미만으로 떨어졌을 때, 프로세서는 그에 응답하여 소정의 조인트 각도를 재설정하고, 그 조인트 포지션으로부터의 운동을 방지하도록 서보잉(또는 제동)을 재시작할 수 있다. 사용자가 임의의 오버슈트(overshoot)를 보정하기 위해 수동식 조인트 관절운동의 방향을 반전시키는 것을 원할 때에는, 프로세서는 관절운동 속도가 소정의 체류 기간 동안 임계값 미만으로 유지될 때까지는 서보를 재사용할 수 없다.
다른 변경예들도 본 발명의 기술사상 내에 있다. 따라서, 본 발명이 다양한 수정 및 변경이 용이지만, 특정 실시형태를 도면에 도시하여 상세히 설명하였다. 하지만, 본 발명을 개시한 특정 형태로 한정하고자 하는 것은 아니며, 그 반대로, 본 발명은 첨부된 청구범위에 한정된 바와 같은 발명의 범위에 속하는 모든 수정, 변경 구조 및 균등적 구성을 커버하고자 한다는 것을 이해해야 한다.
본 발명의 설명하는 문맥에서(특히 이하의 청구범위의 문맥에서)에서의 "하나의", "그 하나의" 및 이와 유사한 표현은, 달리 지시되지 않았거나 문장에서 명백하게 부정되지 않았다면, 단일 형태와 복수 형태를 모두 포괄하는 것을 해석되어야 한다. "포함하다", "가지다", "구비하다", "보유하다"의 상당 표현은, 달리 지시되지 않았다면, 개방형의 표현(즉, 구비하되 그것에 한정되지 않는다는 것을 의미)으로 해석되어야 한다. "연결되다"의 상당 표현은, 달리 지적되지 않았다면, 일부 또는 전체가 수용되거나, 부착되거나, 서로 결합되는 것으로 해석되어야 한다. 여기에서의 수치값의 범위의 기술은, 달리 지시되지 않았다면, 단지 그 범위 내에 속하는 각각의 개별의 수치값을 개별적으로 기술하는 것을 대신하는 방법으로 작용하며, 각각의 개별의 수치값은 마치 개별적으로 언급된 것처럼 본 명세서에 포함된다. 여기에 설명되는 모든 방법은, 달리 지시되지 않았거나 문장에서 명백하게 부정되지 않았다면, 임의의 적합한 순서로 실행될 수 있다. 실시예의 사용 또는 여기에 사용된 예시의 표현(예컨대, "와 같은")는 단지 발명을 더 명확하게 설명하기 위한 것으로, 달리 청구되지 않는다면 발명의 범위를 제한하지 않는다. 명세서 내의 어떠한 표현도 본 발명의 실시에 필수적인 것으로 청구되지 않은 요소를 지시하는 것으로 해석되어서는 안된다.
본 발명자들에게 알려진 본 발명을 실시하기 위한 최적의 모드를 포함하여, 바람직한 실시형태를 설명하였다. 그러한 바람직한 실시형태의 변경은 이상의 설명으로부터 당업자에게 자명할 수 있다. 본 발명자들은 당업자가 그러한 변경을 적절히 채용할 것으로 기대하며, 본 발명자들은 본 발명이 여기에 특정적으로 설명된 것과 다른 방식으로 실시되는 것을 의도하고 있다. 따라서, 본 발명은 적용가능한 법에 의해 허용되는 것으로서 첨부의 청구범위에 기술된 청구대상의 모든 변경들 및 균등 사항들을 포함한다. 또한, 모든 가능한 변형에 있어 전술한 요소들의 임의의 조합도, 달리 지시되지 않았거나 문장에서 명백하게 부정되지 않았다면, 본 발명에 포함되는 것이다.
여기에 인용된, 공보, 특허출원 및 특허를 포함한 모든 참고문헌들은 마치 각각의 참고문헌이 개별적이고 특정적으로 참고되는 것을 지시되어 있고 그 전체 내용이 기술된 것처럼 여기에 인용된다.
Claims (15)
- 로봇 시스템이며,
조인트에 연결된 링키지;
상기 링키지에 연결된 매니퓰레이터; 및
프로세서를 포함하고,
상기 프로세서는:
상기 매니퓰레이터에 캐뉼라의 장착을 감지하고;
상기 캐뉼라가 상기 매니퓰레이터에 장착되었다는 판정에 응답하여 상기 조인트의 수동식 관절운동을 방지하도록 구성되는, 로봇 시스템. - 제 1 항에 있어서, 상기 프로세서는 브레이크 시스템을 사용함으로써 상기 조인트의 수동식 관절운동을 방지하도록 구성되는, 로봇 시스템.
- 제 1 항에 있어서, 상기 매니퓰레이터는 상기 캐뉼라를 분리가능하게 수용하기 위한 캐뉼러 인터페이스를 포함하는, 로봇 시스템.
- 제 1 항 내지 제 3 항 중 어느 한 항에 있어서,
상기 로봇 시스템은 수술 로봇 시스템이고;
상기 링키지는 복수의 매니퓰레이터를 지지하고;
상기 복수의 매니퓰레이터 각각은 수술 기구를 분리가능하게 수용하도록 구성되는, 로봇 시스템. - 제 1 항 내지 제 3 항 중 어느 한 항에 있어서,
상기 조인트에 연결된 구동 또는 브레이크 시스템을 추가로 포함하고,
상기 프로세서는:
소정의 관절운동 임계값 미만인 상기 링키지에 대한 제1 수동식 조작력에 응답하여, 제1 자세로부터의 상기 링키지의 수동식 관절운동을 방지하도록, 상기 구동 또는 브레이크 시스템에 신호를 전달하고;
상기 소정의 관절운동 임계값을 초과하여 상기 링키지를 관절운동시키는 제2 수동식 조작력에 응답하여 상기 신호를 변경시키도록 추가로 구성되고, 변경된 신호는 상기 제1 자세로부터 제2 자세를 향한 상기 링키지의 수동식 운동을 가능하게 하도록 구성되는, 로봇 시스템. - 제 5 항에 있어서,
상기 프로세서는:
상기 수동식 운동의 속도가 제1 임계값 속도 미만인 것을 판정하는 것에 응답하여 상기 제2 자세를 결정하고;
상기 제2 자세로부터의 상기 링키지의 수동식 운동을 방지하도록, 상기 구동 또는 브레이크 시스템에 신호를 전달하도록 추가로 구성되는, 로봇 시스템. - 제 5 항에 있어서, 상기 조인트에 연결된 조인트 센서를 추가로 포함하고, 상기 조인트 센서는 상기 조인트에 가해지는 상기 제1 수동식 조작력의 제1 토크를 감지하도록 구성되고,
상기 프로세서는 상기 제1 토크에 대항하는 상기 링키지에 대한 대항 토크를 가하여 상기 링키지를 상기 제1 자세를 향해 되돌아가게 하기 위한 신호를 결정하도록 구성되고, 상기 구동 또는 브레이크 시스템은 구동 시스템을 포함하는, 로봇 시스템. - 제 7 항에 있어서, 상기 조인트 센서는 상기 조인트에 가해지는 상기 제2 수동식 조작력의 제2 토크를 상기 프로세서에 전달하도록 구성되고,
상기 프로세서는 상기 제2 토크를 이용하여 상기 제2 수동식 조작력이 상기 소정의 관절운동 임계값을 초과하는지를 판정하고, 상기 소정의 관절운동 임계값을 초과하는 상기 제2 수동식 조작력에 응답하여, 상기 제1 토크가 상기 링키지를 수동식으로 이동시키기에 충분하도록 상기 대항 토크를 감소시키기 위해 상기 신호를 변경시키도록 구성되는, 로봇 시스템. - 제 5 항에 있어서, 상기 신호는 구동 신호를 포함하고, 상기 프로세서는 상기 소정의 관절운동 임계값을 초과하는 상기 제2 수동식 조작력에 응답하여, 상기 제2 자세를 향한 상기 수동식 운동을 위해 상기 링키지의 마찰을 경감시키도록 상기 구동 신호에 마찰 보상 성분을 부가함으로써, 상기 구동 신호를 변경시키도록 구성되는, 로봇 시스템.
- 로봇 시스템을 구성하는 방법이며,
링키지에 연결되어 있는 매니퓰레이터에 캐뉼라의 장착을 감지하는 단계;
상기 캐뉼라가 상기 매니퓰레이터에 장착되었다는 판정에 응답하여 상기 링키지에 연결된 조인트의 수동식 관절운동을 방지하는 단계를 포함하는, 로봇 시스템을 구성하는 방법. - 제 10 항에 있어서, 브레이크 시스템을 사용하여 상기 조인트의 수동식 관절운동을 방지하는 단계를 추가로 포함하는, 로봇 시스템을 구성하는 방법.
- 제 10 항 또는 제 11 항에 있어서,
소정의 관절운동 임계값 미만인 상기 링키지에 대한 제1 수동식 조작력에 응답하여, 제1 자세로부터의 상기 링키지의 수동식 관절운동을 방지하도록, 구동 또는 브레이크 시스템에 신호를 전달하는 단계;
상기 소정의 관절운동 임계값을 초과하여 상기 링키지를 관절운동시키는 제2 수동식 조작력에 응답하여 상기 신호를 변경시키는 단계를 추가로 포함하고, 변경된 신호는 상기 제1 자세로부터 제2 자세를 향한 상기 링키지의 수동식 운동을 가능하게 하도록 구성되는, 로봇 시스템을 구성하는 방법. - 제 12 항에 있어서,
상기 수동식 운동의 속도가 제1 임계값 속도 미만인 것을 판정하는 것에 응답하여 상기 제2 자세를 결정하는 단계;
상기 제2 자세로부터의 상기 링키지의 수동식 운동을 방지하도록, 상기 구동 또는 브레이크 시스템에 신호를 전달하는 단계를 추가로 포함하는, 로봇 시스템을 구성하는 방법. - 제 12 항에 있어서, 상기 조인트에 가해지는 상기 제1 수동식 조작력의 제1 토크에 대항하는 상기 링키지에 대한 대항 토크를 가하여 상기 링키지를 상기 제1 자세를 향해 되돌아가게 하기 위한 신호를 결정하는 단계를 추가로 포함하고, 상기 구동 또는 브레이크 시스템은 구동 시스템을 포함하는, 로봇 시스템을 구성하는 방법.
- 제 12 항에 있어서, 상기 신호는 구동 신호를 포함하고, 상기 방법은 상기 소정의 관절운동 임계값을 초과하는 상기 제2 수동식 조작력에 응답하여, 상기 제2 자세를 향한 상기 수동식 운동을 위해 상기 링키지의 마찰을 경감시키도록 상기 구동 신호에 마찰 보상 성분을 부가함으로써, 상기 구동 신호를 변경시키는 단계를 추가로 포함하는, 로봇 시스템을 구성하는 방법.
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201261683626P | 2012-08-15 | 2012-08-15 | |
| US61/683,626 | 2012-08-15 | ||
| KR1020157006553A KR102145801B1 (ko) | 2012-08-15 | 2013-08-15 | 수술용 장착 플랫폼의 사용자 개시 브레이크-어웨이 클러칭 |
| PCT/US2013/055081 WO2014028702A1 (en) | 2012-08-15 | 2013-08-15 | User initiated break-away clutching of a surgical mounting platform |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020157006553A Division KR102145801B1 (ko) | 2012-08-15 | 2013-08-15 | 수술용 장착 플랫폼의 사용자 개시 브레이크-어웨이 클러칭 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200097816A true KR20200097816A (ko) | 2020-08-19 |
| KR102283182B1 KR102283182B1 (ko) | 2021-07-29 |
Family
ID=50100576
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020157006553A KR102145801B1 (ko) | 2012-08-15 | 2013-08-15 | 수술용 장착 플랫폼의 사용자 개시 브레이크-어웨이 클러칭 |
| KR1020207023019A KR102283182B1 (ko) | 2012-08-15 | 2013-08-15 | 수술용 장착 플랫폼의 사용자 개시 브레이크-어웨이 클러칭 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020157006553A KR102145801B1 (ko) | 2012-08-15 | 2013-08-15 | 수술용 장착 플랫폼의 사용자 개시 브레이크-어웨이 클러칭 |
Country Status (6)
| Country | Link |
|---|---|
| US (4) | US9452020B2 (ko) |
| EP (2) | EP3824840A1 (ko) |
| JP (1) | JP6247296B2 (ko) |
| KR (2) | KR102145801B1 (ko) |
| CN (2) | CN104717936B (ko) |
| WO (1) | WO2014028702A1 (ko) |
Families Citing this family (296)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8004229B2 (en) | 2005-05-19 | 2011-08-23 | Intuitive Surgical Operations, Inc. | Software center and highly configurable robotic systems for surgery and other uses |
| US9468501B2 (en) * | 1999-09-17 | 2016-10-18 | Intuitive Surgical Operations, Inc. | Systems and methods for using the null space to emphasize manipulator joint motion anisotropically |
| US9060770B2 (en) | 2003-05-20 | 2015-06-23 | Ethicon Endo-Surgery, Inc. | Robotically-driven surgical instrument with E-beam driver |
| US20070084897A1 (en) | 2003-05-20 | 2007-04-19 | Shelton Frederick E Iv | Articulating surgical stapling instrument incorporating a two-piece e-beam firing mechanism |
| JP4755638B2 (ja) | 2004-03-05 | 2011-08-24 | ハンセン メディカル,インク. | ロボットガイドカテーテルシステム |
| US11896225B2 (en) | 2004-07-28 | 2024-02-13 | Cilag Gmbh International | Staple cartridge comprising a pan |
| JP2009500086A (ja) | 2005-07-01 | 2009-01-08 | ハンセン メディカル,インク. | ロボットガイドカテーテルシステム |
| US10159482B2 (en) | 2005-08-31 | 2018-12-25 | Ethicon Llc | Fastener cartridge assembly comprising a fixed anvil and different staple heights |
| US7669746B2 (en) | 2005-08-31 | 2010-03-02 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US11246590B2 (en) | 2005-08-31 | 2022-02-15 | Cilag Gmbh International | Staple cartridge including staple drivers having different unfired heights |
| US20070106317A1 (en) | 2005-11-09 | 2007-05-10 | Shelton Frederick E Iv | Hydraulically and electrically actuated articulation joints for surgical instruments |
| US7845537B2 (en) | 2006-01-31 | 2010-12-07 | Ethicon Endo-Surgery, Inc. | Surgical instrument having recording capabilities |
| US20110290856A1 (en) | 2006-01-31 | 2011-12-01 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical instrument with force-feedback capabilities |
| US11793518B2 (en) | 2006-01-31 | 2023-10-24 | Cilag Gmbh International | Powered surgical instruments with firing system lockout arrangements |
| US20120292367A1 (en) | 2006-01-31 | 2012-11-22 | Ethicon Endo-Surgery, Inc. | Robotically-controlled end effector |
| US8708213B2 (en) | 2006-01-31 | 2014-04-29 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a feedback system |
| US8186555B2 (en) | 2006-01-31 | 2012-05-29 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with mechanical closure system |
| US8820603B2 (en) | 2006-01-31 | 2014-09-02 | Ethicon Endo-Surgery, Inc. | Accessing data stored in a memory of a surgical instrument |
| US10568652B2 (en) | 2006-09-29 | 2020-02-25 | Ethicon Llc | Surgical staples having attached drivers of different heights and stapling instruments for deploying the same |
| US11980366B2 (en) | 2006-10-03 | 2024-05-14 | Cilag Gmbh International | Surgical instrument |
| US8684253B2 (en) | 2007-01-10 | 2014-04-01 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between a control unit of a robotic system and remote sensor |
| US7434717B2 (en) | 2007-01-11 | 2008-10-14 | Ethicon Endo-Surgery, Inc. | Apparatus for closing a curved anvil of a surgical stapling device |
| WO2008097853A2 (en) | 2007-02-02 | 2008-08-14 | Hansen Medical, Inc. | Mounting support assembly for suspending a medical instrument driver above an operating table |
| US11672531B2 (en) | 2007-06-04 | 2023-06-13 | Cilag Gmbh International | Rotary drive systems for surgical instruments |
| US8931682B2 (en) | 2007-06-04 | 2015-01-13 | Ethicon Endo-Surgery, Inc. | Robotically-controlled shaft based rotary drive systems for surgical instruments |
| US11849941B2 (en) | 2007-06-29 | 2023-12-26 | Cilag Gmbh International | Staple cartridge having staple cavities extending at a transverse angle relative to a longitudinal cartridge axis |
| US11986183B2 (en) | 2008-02-14 | 2024-05-21 | Cilag Gmbh International | Surgical cutting and fastening instrument comprising a plurality of sensors to measure an electrical parameter |
| JP5410110B2 (ja) | 2008-02-14 | 2014-02-05 | エシコン・エンド−サージェリィ・インコーポレイテッド | Rf電極を有する外科用切断・固定器具 |
| US8636736B2 (en) | 2008-02-14 | 2014-01-28 | Ethicon Endo-Surgery, Inc. | Motorized surgical cutting and fastening instrument |
| US9386983B2 (en) | 2008-09-23 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Robotically-controlled motorized surgical instrument |
| US11648005B2 (en) | 2008-09-23 | 2023-05-16 | Cilag Gmbh International | Robotically-controlled motorized surgical instrument with an end effector |
| US9005230B2 (en) | 2008-09-23 | 2015-04-14 | Ethicon Endo-Surgery, Inc. | Motorized surgical instrument |
| US8210411B2 (en) | 2008-09-23 | 2012-07-03 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument |
| US8608045B2 (en) | 2008-10-10 | 2013-12-17 | Ethicon Endo-Sugery, Inc. | Powered surgical cutting and stapling apparatus with manually retractable firing system |
| US10945731B2 (en) | 2010-09-30 | 2021-03-16 | Ethicon Llc | Tissue thickness compensator comprising controlled release and expansion |
| US10405854B2 (en) | 2010-09-30 | 2019-09-10 | Ethicon Llc | Surgical stapling cartridge with layer retention features |
| US11812965B2 (en) | 2010-09-30 | 2023-11-14 | Cilag Gmbh International | Layer of material for a surgical end effector |
| US11849952B2 (en) | 2010-09-30 | 2023-12-26 | Cilag Gmbh International | Staple cartridge comprising staples positioned within a compressible portion thereof |
| US8978954B2 (en) | 2010-09-30 | 2015-03-17 | Ethicon Endo-Surgery, Inc. | Staple cartridge comprising an adjustable distal portion |
| US9386988B2 (en) | 2010-09-30 | 2016-07-12 | Ethicon End-Surgery, LLC | Retainer assembly including a tissue thickness compensator |
| US9629814B2 (en) | 2010-09-30 | 2017-04-25 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator configured to redistribute compressive forces |
| US9119655B2 (en) | 2012-08-03 | 2015-09-01 | Stryker Corporation | Surgical manipulator capable of controlling a surgical instrument in multiple modes |
| US20120191086A1 (en) | 2011-01-20 | 2012-07-26 | Hansen Medical, Inc. | System and method for endoluminal and translumenal therapy |
| KR102181391B1 (ko) | 2011-02-15 | 2020-11-20 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 조임 예측을 나타내는 시스템 |
| RU2606493C2 (ru) | 2011-04-29 | 2017-01-10 | Этикон Эндо-Серджери, Инк. | Кассета со скобками, содержащая скобки, расположенные внутри ее сжимаемой части |
| US9072535B2 (en) | 2011-05-27 | 2015-07-07 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments with rotatable staple deployment arrangements |
| KR101917076B1 (ko) * | 2012-02-21 | 2018-11-09 | 삼성전자주식회사 | 링크 유닛 및 이를 가지는 암 모듈 |
| MX358135B (es) | 2012-03-28 | 2018-08-06 | Ethicon Endo Surgery Inc | Compensador de grosor de tejido que comprende una pluralidad de capas. |
| BR112014024098B1 (pt) | 2012-03-28 | 2021-05-25 | Ethicon Endo-Surgery, Inc. | cartucho de grampos |
| US10383765B2 (en) | 2012-04-24 | 2019-08-20 | Auris Health, Inc. | Apparatus and method for a global coordinate system for use in robotic surgery |
| KR102309822B1 (ko) * | 2012-06-01 | 2021-10-08 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 멀티포트 수술 로봇 시스템 구조 |
| US9101358B2 (en) | 2012-06-15 | 2015-08-11 | Ethicon Endo-Surgery, Inc. | Articulatable surgical instrument comprising a firing drive |
| US9289256B2 (en) | 2012-06-28 | 2016-03-22 | Ethicon Endo-Surgery, Llc | Surgical end effectors having angled tissue-contacting surfaces |
| US9649111B2 (en) | 2012-06-28 | 2017-05-16 | Ethicon Endo-Surgery, Llc | Replaceable clip cartridge for a clip applier |
| US20140001234A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Coupling arrangements for attaching surgical end effectors to drive systems therefor |
| US20140001231A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Firing system lockout arrangements for surgical instruments |
| US9226796B2 (en) | 2012-08-03 | 2016-01-05 | Stryker Corporation | Method for detecting a disturbance as an energy applicator of a surgical instrument traverses a cutting path |
| KR102530836B1 (ko) | 2012-08-03 | 2023-05-10 | 스트리커 코포레이션 | 로봇 수술을 위한 시스템 및 방법 |
| EP3824840A1 (en) * | 2012-08-15 | 2021-05-26 | Intuitive Surgical Operations, Inc. | User initiated break-away clutching of a surgical mounting platform |
| US9700310B2 (en) | 2013-08-23 | 2017-07-11 | Ethicon Llc | Firing member retraction devices for powered surgical instruments |
| MX368026B (es) | 2013-03-01 | 2019-09-12 | Ethicon Endo Surgery Inc | Instrumento quirúrgico articulable con vías conductoras para la comunicación de la señal. |
| US20140277334A1 (en) | 2013-03-14 | 2014-09-18 | Hansen Medical, Inc. | Active drives for robotic catheter manipulators |
| US9326822B2 (en) | 2013-03-14 | 2016-05-03 | Hansen Medical, Inc. | Active drives for robotic catheter manipulators |
| US20140276936A1 (en) | 2013-03-15 | 2014-09-18 | Hansen Medical, Inc. | Active drive mechanism for simultaneous rotation and translation |
| US9408669B2 (en) | 2013-03-15 | 2016-08-09 | Hansen Medical, Inc. | Active drive mechanism with finite range of motion |
| US10274553B2 (en) | 2013-03-15 | 2019-04-30 | Canon U.S.A., Inc. | Needle placement manipulator with attachment for RF-coil |
| US9222996B2 (en) | 2013-03-15 | 2015-12-29 | The Brigham And Women's Hospital, Inc. | Needle placement manipulator with two rotary guides |
| BR112015026109B1 (pt) | 2013-04-16 | 2022-02-22 | Ethicon Endo-Surgery, Inc | Instrumento cirúrgico |
| CN110074844B (zh) | 2013-12-11 | 2023-02-17 | 柯惠Lp公司 | 用于机器人手术系统的腕组件及钳夹组件 |
| JP6467434B2 (ja) | 2014-02-27 | 2019-02-13 | ザ ブリガム アンド ウィメンズ ホスピタル インコーポレイテッドThe Brigham and Women’s Hospital, Inc. | 載置装置 |
| KR102646014B1 (ko) * | 2014-03-17 | 2024-03-12 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 액티브 바이어스를 가진 일정 힘 스프링 |
| CN110251233B (zh) * | 2014-03-17 | 2023-02-03 | 直观外科手术操作公司 | 用于与基准靶对准的系统和方法 |
| KR102457538B1 (ko) * | 2014-03-17 | 2022-10-24 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 관절방식 암에서 브레이크어웨이 클러칭을 위한 시스템 및 방법 |
| EP3119336A4 (en) | 2014-03-17 | 2017-11-15 | Intuitive Surgical Operations, Inc. | Methods of controlling motion of under-actuated joints in a surgical set-up structure |
| US9597153B2 (en) | 2014-03-17 | 2017-03-21 | Intuitive Surgical Operations, Inc. | Positions for multiple surgical mounting platform rotation clutch buttons |
| US20220218344A1 (en) * | 2014-03-26 | 2022-07-14 | Cilag Gmbh International | Surgical instrument comprising a sensor system |
| US20150297222A1 (en) | 2014-04-16 | 2015-10-22 | Ethicon Endo-Surgery, Inc. | Fastener cartridges including extensions having different configurations |
| CN106456158B (zh) | 2014-04-16 | 2019-02-05 | 伊西康内外科有限责任公司 | 包括非一致紧固件的紧固件仓 |
| BR112016023807B1 (pt) | 2014-04-16 | 2022-07-12 | Ethicon Endo-Surgery, Llc | Conjunto de cartucho de prendedores para uso com um instrumento cirúrgico |
| CN106456176B (zh) | 2014-04-16 | 2019-06-28 | 伊西康内外科有限责任公司 | 包括具有不同构型的延伸部的紧固件仓 |
| US10046140B2 (en) | 2014-04-21 | 2018-08-14 | Hansen Medical, Inc. | Devices, systems, and methods for controlling active drive systems |
| WO2015171988A1 (en) | 2014-05-09 | 2015-11-12 | Canon U.S.A., Inc. | Positioning apparatus |
| KR102414384B1 (ko) * | 2014-08-12 | 2022-06-30 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 비제어 이동 검출 |
| US10390853B2 (en) | 2014-08-13 | 2019-08-27 | Covidien Lp | Robotically controlling mechanical advantage gripping |
| BR112017004361B1 (pt) | 2014-09-05 | 2023-04-11 | Ethicon Llc | Sistema eletrônico para um instrumento cirúrgico |
| US20160066913A1 (en) | 2014-09-05 | 2016-03-10 | Ethicon Endo-Surgery, Inc. | Local display of tissue parameter stabilization |
| EP3190996A4 (en) | 2014-09-12 | 2018-04-25 | Canon U.S.A., Inc. | Needle positioning apparatus |
| US10499999B2 (en) | 2014-10-09 | 2019-12-10 | Auris Health, Inc. | Systems and methods for aligning an elongate member with an access site |
| US9924944B2 (en) | 2014-10-16 | 2018-03-27 | Ethicon Llc | Staple cartridge comprising an adjunct material |
| KR102628659B1 (ko) | 2014-10-27 | 2024-01-25 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 반응 운동 동안 제어점을 감시하기 위한 시스템 및 방법 |
| WO2016069655A1 (en) | 2014-10-27 | 2016-05-06 | Intuitive Surgical Operations, Inc. | System and method for registering to a surgical table |
| KR102545930B1 (ko) | 2014-10-27 | 2023-06-22 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 통합 수술 테이블을 위한 시스템 및 방법 |
| KR102655083B1 (ko) | 2014-10-27 | 2024-04-08 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 브레이크 해제가 능동적으로 제어되는 의료 장치 |
| KR102479015B1 (ko) * | 2014-10-27 | 2022-12-20 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 통합 수술 테이블 운동을 위한 시스템 및 방법 |
| US10272569B2 (en) | 2014-10-27 | 2019-04-30 | Intuitive Surgical Operations, Inc. | System and method for instrument disturbance compensation |
| EP3212148A4 (en) | 2014-10-27 | 2018-07-11 | Intuitive Surgical Operations, Inc. | System and method for integrated surgical table icons |
| US11141153B2 (en) | 2014-10-29 | 2021-10-12 | Cilag Gmbh International | Staple cartridges comprising driver arrangements |
| US10517594B2 (en) | 2014-10-29 | 2019-12-31 | Ethicon Llc | Cartridge assemblies for surgical staplers |
| DE102014224122B4 (de) * | 2014-11-26 | 2018-10-25 | Siemens Healthcare Gmbh | Verfahren zum Betreiben eines robotischen Gerätes und robotisches Gerät |
| US10085748B2 (en) | 2014-12-18 | 2018-10-02 | Ethicon Llc | Locking arrangements for detachable shaft assemblies with articulatable surgical end effectors |
| US10004501B2 (en) | 2014-12-18 | 2018-06-26 | Ethicon Llc | Surgical instruments with improved closure arrangements |
| US9987000B2 (en) | 2014-12-18 | 2018-06-05 | Ethicon Llc | Surgical instrument assembly comprising a flexible articulation system |
| RU2703684C2 (ru) | 2014-12-18 | 2019-10-21 | ЭТИКОН ЭНДО-СЕРДЖЕРИ, ЭлЭлСи | Хирургический инструмент с упором, который выполнен с возможностью избирательного перемещения относительно кассеты со скобами вокруг дискретной неподвижной оси |
| CA2975907C (en) | 2015-02-19 | 2023-10-10 | Covidien Lp | Repositioning method of input device for robotic surgical system |
| US11154301B2 (en) | 2015-02-27 | 2021-10-26 | Cilag Gmbh International | Modular stapling assembly |
| US10441279B2 (en) | 2015-03-06 | 2019-10-15 | Ethicon Llc | Multiple level thresholds to modify operation of powered surgical instruments |
| JP2020121162A (ja) | 2015-03-06 | 2020-08-13 | エシコン エルエルシーEthicon LLC | 測定の安定性要素、クリープ要素、及び粘弾性要素を決定するためのセンサデータの時間依存性評価 |
| US10716639B2 (en) | 2015-03-10 | 2020-07-21 | Covidien Lp | Measuring health of a connector member of a robotic surgical system |
| CN107427326B (zh) * | 2015-03-17 | 2020-10-13 | 直观外科手术操作公司 | 用于在手动关节定位期间提供反馈的系统和方法 |
| US10390825B2 (en) | 2015-03-31 | 2019-08-27 | Ethicon Llc | Surgical instrument with progressive rotary drive systems |
| JP6697480B2 (ja) * | 2015-04-10 | 2020-05-20 | マコ サージカル コーポレーション | 外科用工具の自律移動の際に同外科用工具を制御するためのシステム及び方法 |
| US10959788B2 (en) | 2015-06-03 | 2021-03-30 | Covidien Lp | Offset instrument drive unit |
| EP4331522A3 (en) * | 2015-06-10 | 2024-05-22 | Intuitive Surgical Operations, Inc. | System and method for patient-side instrument control |
| US10507068B2 (en) | 2015-06-16 | 2019-12-17 | Covidien Lp | Robotic surgical system torque transduction sensing |
| CN107820412B (zh) | 2015-06-23 | 2021-01-15 | 柯惠Lp公司 | 机器人手术组合件 |
| US9867673B2 (en) | 2015-07-14 | 2018-01-16 | Canon U.S.A, Inc. | Medical support device |
| US10639065B2 (en) | 2015-07-21 | 2020-05-05 | Canon U.S.A., Inc. | Medical assist device |
| JP6240689B2 (ja) * | 2015-07-31 | 2017-11-29 | ファナック株式会社 | 人の行動パターンを学習する機械学習装置、ロボット制御装置、ロボットシステム、および機械学習方法 |
| EP3342556A4 (en) * | 2015-08-25 | 2019-05-29 | Kawasaki Jukogyo Kabushiki Kaisha | ROBOTIC SYSTEM |
| US10105139B2 (en) | 2015-09-23 | 2018-10-23 | Ethicon Llc | Surgical stapler having downstream current-based motor control |
| EP3352699B1 (en) | 2015-09-25 | 2023-08-23 | Covidien LP | Robotic surgical assemblies and instrument drive connectors thereof |
| US11890015B2 (en) | 2015-09-30 | 2024-02-06 | Cilag Gmbh International | Compressible adjunct with crossing spacer fibers |
| US10285699B2 (en) | 2015-09-30 | 2019-05-14 | Ethicon Llc | Compressible adjunct |
| ITUB20155057A1 (it) * | 2015-10-16 | 2017-04-16 | Medical Microinstruments S R L | Assieme robotico di chirurgia |
| CN108135670B (zh) | 2015-10-23 | 2021-02-26 | 柯惠Lp公司 | 用于检测灌注中逐步变化的手术系统 |
| WO2017083163A1 (en) | 2015-11-11 | 2017-05-18 | Mako Surgical Corp. | Robotic system and method for backdriving the same |
| US10660714B2 (en) | 2015-11-19 | 2020-05-26 | Covidien Lp | Optical force sensor for robotic surgical system |
| US10292704B2 (en) | 2015-12-30 | 2019-05-21 | Ethicon Llc | Mechanisms for compensating for battery pack failure in powered surgical instruments |
| JP6827041B2 (ja) * | 2016-01-20 | 2021-02-10 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 医療デバイスの再配置可能なアームにおける運動偏差の急速な停止及び回復のためのシステム及び方法 |
| WO2017132505A1 (en) | 2016-01-29 | 2017-08-03 | Canon U.S.A., Inc. | Tool placement manipulator |
| CN108472087B (zh) | 2016-01-29 | 2021-08-27 | 直观外科手术操作公司 | 用于可变速外科手术器械的系统和方法 |
| US11213293B2 (en) | 2016-02-09 | 2022-01-04 | Cilag Gmbh International | Articulatable surgical instruments with single articulation link arrangements |
| US10448948B2 (en) | 2016-02-12 | 2019-10-22 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| WO2017173524A1 (en) | 2016-04-07 | 2017-10-12 | Titan Medical Inc. | Camera positioning method and apparatus for capturing images during a medical procedure |
| US10357247B2 (en) | 2016-04-15 | 2019-07-23 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US10426467B2 (en) | 2016-04-15 | 2019-10-01 | Ethicon Llc | Surgical instrument with detection sensors |
| US10828028B2 (en) | 2016-04-15 | 2020-11-10 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US10426469B2 (en) | 2016-04-18 | 2019-10-01 | Ethicon Llc | Surgical instrument comprising a primary firing lockout and a secondary firing lockout |
| US20170296173A1 (en) | 2016-04-18 | 2017-10-19 | Ethicon Endo-Surgery, Llc | Method for operating a surgical instrument |
| US10624667B2 (en) * | 2016-05-20 | 2020-04-21 | Ethicon Llc | System and method to track usage of surgical instrument |
| WO2017205333A1 (en) | 2016-05-26 | 2017-11-30 | Covidien Lp | Robotic surgical assemblies |
| CA3022139A1 (en) | 2016-05-26 | 2017-11-30 | Covidien Lp | Instrument drive units |
| WO2017210074A1 (en) | 2016-06-03 | 2017-12-07 | Covidien Lp | Passive axis system for robotic surgical systems |
| WO2017210500A1 (en) | 2016-06-03 | 2017-12-07 | Covidien Lp | Robotic surgical system with an embedded imager |
| EP3463162A4 (en) | 2016-06-03 | 2020-06-24 | Covidien LP | SYSTEMS, METHODS AND COMPUTER READABLE PROGRAM PRODUCTS FOR CONTROLLING A ROBOT CONTROLLED MANIPULATOR |
| CN113180835A (zh) | 2016-06-03 | 2021-07-30 | 柯惠Lp公司 | 用于机器人手术系统的控制臂 |
| US11020191B2 (en) | 2016-07-14 | 2021-06-01 | Intuitive Surgical Operations, Inc. | Automatic manipulator assembly deployment for draping |
| US11241559B2 (en) | 2016-08-29 | 2022-02-08 | Auris Health, Inc. | Active drive for guidewire manipulation |
| US10568703B2 (en) | 2016-09-21 | 2020-02-25 | Verb Surgical Inc. | User arm support for use in a robotic surgical system |
| JP6948389B2 (ja) | 2016-10-19 | 2021-10-13 | キヤノン ユーエスエイ, インコーポレイテッドCanon U.S.A., Inc | 穿刺器具を位置決めするための配置マニピュレータおよびアタッチメント |
| JP2018075121A (ja) * | 2016-11-08 | 2018-05-17 | ソニー株式会社 | 医療用支持アーム装置 |
| EP3554414A1 (en) | 2016-12-16 | 2019-10-23 | MAKO Surgical Corp. | Techniques for modifying tool operation in a surgical robotic system based on comparing actual and commanded states of the tool relative to a surgical site |
| US20180168625A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Surgical stapling instruments with smart staple cartridges |
| US10675025B2 (en) | 2016-12-21 | 2020-06-09 | Ethicon Llc | Shaft assembly comprising separately actuatable and retractable systems |
| US20180168575A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Surgical stapling systems |
| US10537325B2 (en) | 2016-12-21 | 2020-01-21 | Ethicon Llc | Staple forming pocket arrangement to accommodate different types of staples |
| JP7010956B2 (ja) | 2016-12-21 | 2022-01-26 | エシコン エルエルシー | 組織をステープル留めする方法 |
| US20180168615A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Method of deforming staples from two different types of staple cartridges with the same surgical stapling instrument |
| CA3048039A1 (en) | 2017-02-15 | 2018-08-23 | Covidien Lp | System and apparatus for crush prevention for medical robot applications |
| US10792119B2 (en) | 2017-05-22 | 2020-10-06 | Ethicon Llc | Robotic arm cart and uses therefor |
| US11717361B2 (en) | 2017-05-24 | 2023-08-08 | Covidien Lp | Electrosurgical robotic system having tool presence detection |
| EP3629980A4 (en) | 2017-05-25 | 2021-03-10 | Covidien LP | ROBOTIC SURGICAL SYSTEM WITH AUTOMATED GUIDANCE |
| JP7130003B2 (ja) | 2017-05-25 | 2022-09-02 | コヴィディエン リミテッド パートナーシップ | 画像捕捉デバイスの視野内の物体の検出のためのシステムおよび方法 |
| JP2020520694A (ja) | 2017-05-25 | 2020-07-16 | コヴィディエン リミテッド パートナーシップ | ロボット手術システムおよびロボット手術システムのコンポーネントを覆うためのドレープ |
| US10856948B2 (en) | 2017-05-31 | 2020-12-08 | Verb Surgical Inc. | Cart for robotic arms and method and apparatus for registering cart to surgical table |
| US10485623B2 (en) | 2017-06-01 | 2019-11-26 | Verb Surgical Inc. | Robotic arm cart with fine position adjustment features and uses therefor |
| US10913145B2 (en) | 2017-06-20 | 2021-02-09 | Verb Surgical Inc. | Cart for robotic arms and method and apparatus for cartridge or magazine loading of arms |
| US10881399B2 (en) | 2017-06-20 | 2021-01-05 | Ethicon Llc | Techniques for adaptive control of motor velocity of a surgical stapling and cutting instrument |
| US11517325B2 (en) | 2017-06-20 | 2022-12-06 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured displacement distance traveled over a specified time interval |
| US10779820B2 (en) | 2017-06-20 | 2020-09-22 | Ethicon Llc | Systems and methods for controlling motor speed according to user input for a surgical instrument |
| US10307170B2 (en) | 2017-06-20 | 2019-06-04 | Ethicon Llc | Method for closed loop control of motor velocity of a surgical stapling and cutting instrument |
| US11653914B2 (en) | 2017-06-20 | 2023-05-23 | Cilag Gmbh International | Systems and methods for controlling motor velocity of a surgical stapling and cutting instrument according to articulation angle of end effector |
| US10993716B2 (en) | 2017-06-27 | 2021-05-04 | Ethicon Llc | Surgical anvil arrangements |
| US11484310B2 (en) | 2017-06-28 | 2022-11-01 | Cilag Gmbh International | Surgical instrument comprising a shaft including a closure tube profile |
| US10765427B2 (en) | 2017-06-28 | 2020-09-08 | Ethicon Llc | Method for articulating a surgical instrument |
| US11564686B2 (en) | 2017-06-28 | 2023-01-31 | Cilag Gmbh International | Surgical shaft assemblies with flexible interfaces |
| US11395703B2 (en) | 2017-06-28 | 2022-07-26 | Auris Health, Inc. | Electromagnetic distortion detection |
| CN110809452B (zh) | 2017-06-28 | 2023-05-23 | 奥瑞斯健康公司 | 电磁场发生器对准 |
| USD906355S1 (en) | 2017-06-28 | 2020-12-29 | Ethicon Llc | Display screen or portion thereof with a graphical user interface for a surgical instrument |
| EP4070740A1 (en) | 2017-06-28 | 2022-10-12 | Cilag GmbH International | Surgical instrument comprising selectively actuatable rotatable couplers |
| US10932772B2 (en) | 2017-06-29 | 2021-03-02 | Ethicon Llc | Methods for closed loop velocity control for robotic surgical instrument |
| US11672621B2 (en) | 2017-07-27 | 2023-06-13 | Intuitive Surgical Operations, Inc. | Light displays in a medical device |
| US11944300B2 (en) | 2017-08-03 | 2024-04-02 | Cilag Gmbh International | Method for operating a surgical system bailout |
| US11974742B2 (en) | 2017-08-03 | 2024-05-07 | Cilag Gmbh International | Surgical system comprising an articulation bailout |
| US11628022B2 (en) | 2017-09-05 | 2023-04-18 | Covidien Lp | Collision handling algorithms for robotic surgical systems |
| CN111132629B (zh) | 2017-09-06 | 2024-04-16 | 柯惠Lp公司 | 手术机器人的边界缩放 |
| KR102370879B1 (ko) * | 2017-09-12 | 2022-03-07 | 주식회사 한화 | 협동로봇제어장치 및 협동로봇을 제어하는 방법 |
| US10034721B1 (en) * | 2017-09-27 | 2018-07-31 | Verb Surgical Inc. | Robotic arm cart having shock absorbing mechanisms and uses therefor |
| US10464209B2 (en) | 2017-10-05 | 2019-11-05 | Auris Health, Inc. | Robotic system with indication of boundary for robotic arm |
| US10016900B1 (en) * | 2017-10-10 | 2018-07-10 | Auris Health, Inc. | Surgical robotic arm admittance control |
| US10842490B2 (en) | 2017-10-31 | 2020-11-24 | Ethicon Llc | Cartridge body design with force reduction based on firing completion |
| US10779826B2 (en) | 2017-12-15 | 2020-09-22 | Ethicon Llc | Methods of operating surgical end effectors |
| US20190192151A1 (en) | 2017-12-21 | 2019-06-27 | Ethicon Llc | Surgical instrument having a display comprising image layers |
| CN112315585B (zh) | 2017-12-27 | 2022-04-08 | 上海微创医疗机器人(集团)股份有限公司 | 手术机器人终端 |
| WO2019136062A1 (en) | 2018-01-04 | 2019-07-11 | Covidien Lp | Systems and assemblies for mounting a surgical accessory to robotic surgical systems, and providing access therethrough |
| US11189379B2 (en) | 2018-03-06 | 2021-11-30 | Digital Surgery Limited | Methods and systems for using multiple data structures to process surgical data |
| CN111787880A (zh) | 2018-03-08 | 2020-10-16 | 柯惠Lp公司 | 手术机器人系统 |
| JP7071045B2 (ja) | 2018-04-20 | 2022-05-18 | コヴィディエン リミテッド パートナーシップ | 外科用ロボットカートの配置のためのシステムおよび方法 |
| EP3781073A4 (en) | 2018-04-20 | 2022-01-26 | Covidien LP | COMPENSATION OF OBSERVER MOTION IN ROBOTIC SURGICAL SYSTEMS WITH STEREOSCOPIC DISPLAYS |
| IT201800005431A1 (it) * | 2018-05-16 | 2019-11-16 | Apparato di posizionamento di un arto di un paziente | |
| US11576739B2 (en) | 2018-07-03 | 2023-02-14 | Covidien Lp | Systems, methods, and computer-readable media for detecting image degradation during surgical procedures |
| US11207065B2 (en) | 2018-08-20 | 2021-12-28 | Cilag Gmbh International | Method for fabricating surgical stapler anvils |
| GB2577717B (en) * | 2018-10-03 | 2023-06-21 | Cmr Surgical Ltd | Monitoring performance during manipulation of user input control device of robotic system |
| US11109746B2 (en) | 2018-10-10 | 2021-09-07 | Titan Medical Inc. | Instrument insertion system, method, and apparatus for performing medical procedures |
| WO2020092312A1 (en) * | 2018-10-30 | 2020-05-07 | Covidien Lp | Binding and non-binding articulation limits for robotic surgical systems |
| GB2578791B (en) * | 2018-11-09 | 2022-08-17 | Cmr Surgical Ltd | Haptic control of a surgeon console |
| AU2019391083A1 (en) | 2018-12-04 | 2021-06-10 | Mako Surgical Corp. | Mounting system with sterile barrier assembly for use in coupling surgical components |
| KR102149008B1 (ko) * | 2018-12-13 | 2020-08-31 | (주)미래컴퍼니 | 수술용 로봇의 충돌을 완화시키는 방법 및 시스템 |
| US11586106B2 (en) | 2018-12-28 | 2023-02-21 | Titan Medical Inc. | Imaging apparatus having configurable stereoscopic perspective |
| US11717355B2 (en) | 2019-01-29 | 2023-08-08 | Covidien Lp | Drive mechanisms for surgical instruments such as for use in robotic surgical systems |
| US11576733B2 (en) | 2019-02-06 | 2023-02-14 | Covidien Lp | Robotic surgical assemblies including electrosurgical instruments having articulatable wrist assemblies |
| US11484372B2 (en) | 2019-02-15 | 2022-11-01 | Covidien Lp | Articulation mechanisms for surgical instruments such as for use in robotic surgical systems |
| EP3927270A4 (en) * | 2019-02-22 | 2022-11-23 | Covidien LP | INSERT SHAPER FOR ROBOTIC SURGICAL SYSTEM |
| WO2020185797A1 (en) * | 2019-03-14 | 2020-09-17 | Covidien Lp | Instrument drive unit torque compensation using inertial measurement unit |
| US11696761B2 (en) | 2019-03-25 | 2023-07-11 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11903581B2 (en) | 2019-04-30 | 2024-02-20 | Cilag Gmbh International | Methods for stapling tissue using a surgical instrument |
| US11350938B2 (en) | 2019-06-28 | 2022-06-07 | Cilag Gmbh International | Surgical instrument comprising an aligned rfid sensor |
| US11638587B2 (en) | 2019-06-28 | 2023-05-02 | Cilag Gmbh International | RFID identification systems for surgical instruments |
| US11553971B2 (en) | 2019-06-28 | 2023-01-17 | Cilag Gmbh International | Surgical RFID assemblies for display and communication |
| US11660163B2 (en) | 2019-06-28 | 2023-05-30 | Cilag Gmbh International | Surgical system with RFID tags for updating motor assembly parameters |
| US11684434B2 (en) | 2019-06-28 | 2023-06-27 | Cilag Gmbh International | Surgical RFID assemblies for instrument operational setting control |
| US11627959B2 (en) | 2019-06-28 | 2023-04-18 | Cilag Gmbh International | Surgical instruments including manual and powered system lockouts |
| US11771419B2 (en) | 2019-06-28 | 2023-10-03 | Cilag Gmbh International | Packaging for a replaceable component of a surgical stapling system |
| US11324558B2 (en) | 2019-09-03 | 2022-05-10 | Auris Health, Inc. | Electromagnetic distortion detection and compensation |
| US11844520B2 (en) | 2019-12-19 | 2023-12-19 | Cilag Gmbh International | Staple cartridge comprising driver retention members |
| US11576672B2 (en) | 2019-12-19 | 2023-02-14 | Cilag Gmbh International | Surgical instrument comprising a closure system including a closure member and an opening member driven by a drive screw |
| US11559304B2 (en) | 2019-12-19 | 2023-01-24 | Cilag Gmbh International | Surgical instrument comprising a rapid closure mechanism |
| US11911032B2 (en) | 2019-12-19 | 2024-02-27 | Cilag Gmbh International | Staple cartridge comprising a seating cam |
| US11701111B2 (en) | 2019-12-19 | 2023-07-18 | Cilag Gmbh International | Method for operating a surgical stapling instrument |
| US11529137B2 (en) | 2019-12-19 | 2022-12-20 | Cilag Gmbh International | Staple cartridge comprising driver retention members |
| USD976401S1 (en) | 2020-06-02 | 2023-01-24 | Cilag Gmbh International | Staple cartridge |
| USD975850S1 (en) | 2020-06-02 | 2023-01-17 | Cilag Gmbh International | Staple cartridge |
| USD974560S1 (en) | 2020-06-02 | 2023-01-03 | Cilag Gmbh International | Staple cartridge |
| USD975851S1 (en) | 2020-06-02 | 2023-01-17 | Cilag Gmbh International | Staple cartridge |
| USD963851S1 (en) | 2020-07-10 | 2022-09-13 | Covidien Lp | Port apparatus |
| US20220031346A1 (en) | 2020-07-28 | 2022-02-03 | Cilag Gmbh International | Articulatable surgical instruments with articulation joints comprising flexible exoskeleton arrangements |
| CN116322553A (zh) * | 2020-10-07 | 2023-06-23 | 奥瑞斯健康公司 | 使用连杆交互感测来激活手动操纵的系统和方法 |
| CN114376734B (zh) * | 2020-10-19 | 2024-01-16 | 上海微创医疗机器人(集团)股份有限公司 | 一种手术机器人系统 |
| US11779330B2 (en) | 2020-10-29 | 2023-10-10 | Cilag Gmbh International | Surgical instrument comprising a jaw alignment system |
| US11517390B2 (en) | 2020-10-29 | 2022-12-06 | Cilag Gmbh International | Surgical instrument comprising a limited travel switch |
| US11617577B2 (en) | 2020-10-29 | 2023-04-04 | Cilag Gmbh International | Surgical instrument comprising a sensor configured to sense whether an articulation drive of the surgical instrument is actuatable |
| US11844518B2 (en) | 2020-10-29 | 2023-12-19 | Cilag Gmbh International | Method for operating a surgical instrument |
| US11896217B2 (en) | 2020-10-29 | 2024-02-13 | Cilag Gmbh International | Surgical instrument comprising an articulation lock |
| US11534259B2 (en) | 2020-10-29 | 2022-12-27 | Cilag Gmbh International | Surgical instrument comprising an articulation indicator |
| US11931025B2 (en) | 2020-10-29 | 2024-03-19 | Cilag Gmbh International | Surgical instrument comprising a releasable closure drive lock |
| US11717289B2 (en) | 2020-10-29 | 2023-08-08 | Cilag Gmbh International | Surgical instrument comprising an indicator which indicates that an articulation drive is actuatable |
| USD980425S1 (en) | 2020-10-29 | 2023-03-07 | Cilag Gmbh International | Surgical instrument assembly |
| USD1013170S1 (en) | 2020-10-29 | 2024-01-30 | Cilag Gmbh International | Surgical instrument assembly |
| US11944296B2 (en) | 2020-12-02 | 2024-04-02 | Cilag Gmbh International | Powered surgical instruments with external connectors |
| US11653915B2 (en) | 2020-12-02 | 2023-05-23 | Cilag Gmbh International | Surgical instruments with sled location detection and adjustment features |
| US11744581B2 (en) | 2020-12-02 | 2023-09-05 | Cilag Gmbh International | Powered surgical instruments with multi-phase tissue treatment |
| US11890010B2 (en) | 2020-12-02 | 2024-02-06 | Cllag GmbH International | Dual-sided reinforced reload for surgical instruments |
| US11627960B2 (en) | 2020-12-02 | 2023-04-18 | Cilag Gmbh International | Powered surgical instruments with smart reload with separately attachable exteriorly mounted wiring connections |
| US11678882B2 (en) | 2020-12-02 | 2023-06-20 | Cilag Gmbh International | Surgical instruments with interactive features to remedy incidental sled movements |
| US11737751B2 (en) | 2020-12-02 | 2023-08-29 | Cilag Gmbh International | Devices and methods of managing energy dissipated within sterile barriers of surgical instrument housings |
| US11849943B2 (en) | 2020-12-02 | 2023-12-26 | Cilag Gmbh International | Surgical instrument with cartridge release mechanisms |
| US11653920B2 (en) | 2020-12-02 | 2023-05-23 | Cilag Gmbh International | Powered surgical instruments with communication interfaces through sterile barrier |
| US11925349B2 (en) | 2021-02-26 | 2024-03-12 | Cilag Gmbh International | Adjustment to transfer parameters to improve available power |
| US11744583B2 (en) | 2021-02-26 | 2023-09-05 | Cilag Gmbh International | Distal communication array to tune frequency of RF systems |
| US11793514B2 (en) | 2021-02-26 | 2023-10-24 | Cilag Gmbh International | Staple cartridge comprising sensor array which may be embedded in cartridge body |
| US11730473B2 (en) | 2021-02-26 | 2023-08-22 | Cilag Gmbh International | Monitoring of manufacturing life-cycle |
| US11812964B2 (en) | 2021-02-26 | 2023-11-14 | Cilag Gmbh International | Staple cartridge comprising a power management circuit |
| US11950777B2 (en) | 2021-02-26 | 2024-04-09 | Cilag Gmbh International | Staple cartridge comprising an information access control system |
| US11950779B2 (en) | 2021-02-26 | 2024-04-09 | Cilag Gmbh International | Method of powering and communicating with a staple cartridge |
| US11701113B2 (en) | 2021-02-26 | 2023-07-18 | Cilag Gmbh International | Stapling instrument comprising a separate power antenna and a data transfer antenna |
| US11696757B2 (en) | 2021-02-26 | 2023-07-11 | Cilag Gmbh International | Monitoring of internal systems to detect and track cartridge motion status |
| US11980362B2 (en) | 2021-02-26 | 2024-05-14 | Cilag Gmbh International | Surgical instrument system comprising a power transfer coil |
| US11723657B2 (en) | 2021-02-26 | 2023-08-15 | Cilag Gmbh International | Adjustable communication based on available bandwidth and power capacity |
| US11749877B2 (en) | 2021-02-26 | 2023-09-05 | Cilag Gmbh International | Stapling instrument comprising a signal antenna |
| US11751869B2 (en) | 2021-02-26 | 2023-09-12 | Cilag Gmbh International | Monitoring of multiple sensors over time to detect moving characteristics of tissue |
| US11737749B2 (en) | 2021-03-22 | 2023-08-29 | Cilag Gmbh International | Surgical stapling instrument comprising a retraction system |
| US11806011B2 (en) | 2021-03-22 | 2023-11-07 | Cilag Gmbh International | Stapling instrument comprising tissue compression systems |
| US11723658B2 (en) | 2021-03-22 | 2023-08-15 | Cilag Gmbh International | Staple cartridge comprising a firing lockout |
| US11759202B2 (en) | 2021-03-22 | 2023-09-19 | Cilag Gmbh International | Staple cartridge comprising an implantable layer |
| US11826012B2 (en) | 2021-03-22 | 2023-11-28 | Cilag Gmbh International | Stapling instrument comprising a pulsed motor-driven firing rack |
| US11826042B2 (en) | 2021-03-22 | 2023-11-28 | Cilag Gmbh International | Surgical instrument comprising a firing drive including a selectable leverage mechanism |
| US11717291B2 (en) | 2021-03-22 | 2023-08-08 | Cilag Gmbh International | Staple cartridge comprising staples configured to apply different tissue compression |
| US11903582B2 (en) | 2021-03-24 | 2024-02-20 | Cilag Gmbh International | Leveraging surfaces for cartridge installation |
| US11793516B2 (en) | 2021-03-24 | 2023-10-24 | Cilag Gmbh International | Surgical staple cartridge comprising longitudinal support beam |
| US11744603B2 (en) | 2021-03-24 | 2023-09-05 | Cilag Gmbh International | Multi-axis pivot joints for surgical instruments and methods for manufacturing same |
| US11896219B2 (en) | 2021-03-24 | 2024-02-13 | Cilag Gmbh International | Mating features between drivers and underside of a cartridge deck |
| US11786239B2 (en) | 2021-03-24 | 2023-10-17 | Cilag Gmbh International | Surgical instrument articulation joint arrangements comprising multiple moving linkage features |
| US11944336B2 (en) | 2021-03-24 | 2024-04-02 | Cilag Gmbh International | Joint arrangements for multi-planar alignment and support of operational drive shafts in articulatable surgical instruments |
| US11849945B2 (en) | 2021-03-24 | 2023-12-26 | Cilag Gmbh International | Rotary-driven surgical stapling assembly comprising eccentrically driven firing member |
| US11786243B2 (en) | 2021-03-24 | 2023-10-17 | Cilag Gmbh International | Firing members having flexible portions for adapting to a load during a surgical firing stroke |
| US11896218B2 (en) | 2021-03-24 | 2024-02-13 | Cilag Gmbh International | Method of using a powered stapling device |
| US11832816B2 (en) | 2021-03-24 | 2023-12-05 | Cilag Gmbh International | Surgical stapling assembly comprising nonplanar staples and planar staples |
| US11857183B2 (en) | 2021-03-24 | 2024-01-02 | Cilag Gmbh International | Stapling assembly components having metal substrates and plastic bodies |
| US11849944B2 (en) | 2021-03-24 | 2023-12-26 | Cilag Gmbh International | Drivers for fastener cartridge assemblies having rotary drive screws |
| EP4312857A1 (en) | 2021-03-31 | 2024-02-07 | Moon Surgical SAS | Co-manipulation surgical system for use with surgical instruments for performing laparoscopic surgery |
| US11948226B2 (en) | 2021-05-28 | 2024-04-02 | Covidien Lp | Systems and methods for clinical workspace simulation |
| US11918217B2 (en) | 2021-05-28 | 2024-03-05 | Cilag Gmbh International | Stapling instrument comprising a staple cartridge insertion stop |
| US11980363B2 (en) | 2021-10-18 | 2024-05-14 | Cilag Gmbh International | Row-to-row staple array variations |
| US11937816B2 (en) | 2021-10-28 | 2024-03-26 | Cilag Gmbh International | Electrical lead arrangements for surgical instruments |
| US11986165B1 (en) | 2023-01-09 | 2024-05-21 | Moon Surgical Sas | Co-manipulation surgical system for use with surgical instruments for performing laparoscopic surgery while estimating hold force |
| US11839442B1 (en) | 2023-01-09 | 2023-12-12 | Moon Surgical Sas | Co-manipulation surgical system for use with surgical instruments for performing laparoscopic surgery while estimating hold force |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06278066A (ja) * | 1993-03-31 | 1994-10-04 | Daihen Corp | ロボットの手動運転の制御方法及び制御装置 |
| WO2006124390A2 (en) * | 2005-05-19 | 2006-11-23 | Intuitive Surgical, Inc | Software center and highly configurable robotic systems for surgery and other uses |
| US20070142823A1 (en) * | 2005-12-20 | 2007-06-21 | Intuitive Surgical Inc. | Control system for reducing internally generated frictional and inertial resistance to manual positioning of a surgical manipulator |
| JP2010058202A (ja) * | 2008-09-02 | 2010-03-18 | Yaskawa Electric Corp | ロボットの教示再生装置および教示再生方法 |
| KR20110005829A (ko) * | 2008-03-31 | 2011-01-19 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 수술 로봇 셋업 암에서의 힘과 토크의 감지 |
Family Cites Families (43)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6278066A (ja) | 1985-10-02 | 1987-04-10 | 株式会社 リ−プ | 防錆シ−トと防錆方法 |
| US5279309A (en) | 1991-06-13 | 1994-01-18 | International Business Machines Corporation | Signaling device and method for monitoring positions in a surgical operation |
| US5184601A (en) | 1991-08-05 | 1993-02-09 | Putman John M | Endoscope stabilizer |
| DE69331789T2 (de) | 1992-01-21 | 2003-03-13 | Stanford Res Inst Int | Endoskopisches chirurgisches Instrument |
| EP0699053B1 (en) | 1993-05-14 | 1999-03-17 | Sri International | Surgical apparatus |
| US6406472B1 (en) | 1993-05-14 | 2002-06-18 | Sri International, Inc. | Remote center positioner |
| US5649956A (en) | 1995-06-07 | 1997-07-22 | Sri International | System and method for releasably holding a surgical instrument |
| US5855583A (en) | 1996-02-20 | 1999-01-05 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive cardiac procedures |
| US6699177B1 (en) * | 1996-02-20 | 2004-03-02 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive surgical procedures |
| US6714839B2 (en) * | 1998-12-08 | 2004-03-30 | Intuitive Surgical, Inc. | Master having redundant degrees of freedom |
| AU5391999A (en) * | 1998-08-04 | 2000-02-28 | Intuitive Surgical, Inc. | Manipulator positioning linkage for robotic surgery |
| US6659939B2 (en) * | 1998-11-20 | 2003-12-09 | Intuitive Surgical, Inc. | Cooperative minimally invasive telesurgical system |
| US6852107B2 (en) * | 2002-01-16 | 2005-02-08 | Computer Motion, Inc. | Minimally invasive surgical training using robotics and tele-collaboration |
| US8600551B2 (en) | 1998-11-20 | 2013-12-03 | Intuitive Surgical Operations, Inc. | Medical robotic system with operatively couplable simulator unit for surgeon training |
| US6459926B1 (en) * | 1998-11-20 | 2002-10-01 | Intuitive Surgical, Inc. | Repositioning and reorientation of master/slave relationship in minimally invasive telesurgery |
| US6565554B1 (en) | 1999-04-07 | 2003-05-20 | Intuitive Surgical, Inc. | Friction compensation in a minimally invasive surgical apparatus |
| US6788018B1 (en) | 1999-08-03 | 2004-09-07 | Intuitive Surgical, Inc. | Ceiling and floor mounted surgical robot set-up arms |
| US7594912B2 (en) | 2004-09-30 | 2009-09-29 | Intuitive Surgical, Inc. | Offset remote center manipulator for robotic surgery |
| US6702805B1 (en) | 1999-11-12 | 2004-03-09 | Microdexterity Systems, Inc. | Manipulator |
| EP1351619A4 (en) | 2001-01-16 | 2011-01-05 | Microdexterity Systems Inc | SURGICAL MANIPULATOR |
| US7699835B2 (en) | 2001-02-15 | 2010-04-20 | Hansen Medical, Inc. | Robotically controlled surgical instruments |
| US7763015B2 (en) | 2005-01-24 | 2010-07-27 | Intuitive Surgical Operations, Inc. | Modular manipulator support for robotic surgery |
| WO2007096322A2 (en) * | 2006-02-23 | 2007-08-30 | Abb Ab | A system for controlling the position and orientation of an object in dependence on received forces and torques from a user |
| CN100463661C (zh) * | 2006-12-04 | 2009-02-25 | 天津大学 | 具有重力补偿功能的被动式手动锁紧支架 |
| US8620473B2 (en) * | 2007-06-13 | 2013-12-31 | Intuitive Surgical Operations, Inc. | Medical robotic system with coupled control modes |
| US9084623B2 (en) * | 2009-08-15 | 2015-07-21 | Intuitive Surgical Operations, Inc. | Controller assisted reconfiguration of an articulated instrument during movement into and out of an entry guide |
| EP2230054A4 (en) * | 2007-12-07 | 2011-11-09 | Yaskawa Denki Seisakusho Kk | ROBOT MOTION CONTROL METHOD, ROBOT SYSTEM, AND ROBOT MOTION CONTROL DEVICE |
| US8864652B2 (en) * | 2008-06-27 | 2014-10-21 | Intuitive Surgical Operations, Inc. | Medical robotic system providing computer generated auxiliary views of a camera instrument for controlling the positioning and orienting of its tip |
| US8414469B2 (en) * | 2008-06-27 | 2013-04-09 | Intuitive Surgical Operations, Inc. | Medical robotic system having entry guide controller with instrument tip velocity limiting |
| US8335590B2 (en) | 2008-12-23 | 2012-12-18 | Intuitive Surgical Operations, Inc. | System and method for adjusting an image capturing device attribute using an unused degree-of-freedom of a master control device |
| US8352076B2 (en) * | 2009-06-03 | 2013-01-08 | Canon Kabushiki Kaisha | Robot with camera |
| US8888789B2 (en) * | 2009-09-23 | 2014-11-18 | Intuitive Surgical Operations, Inc. | Curved cannula surgical system control |
| US9724167B2 (en) * | 2009-10-01 | 2017-08-08 | Mako Surgical Corp. | System with brake to limit manual movement of member and control system for same |
| WO2011109041A1 (en) | 2010-03-04 | 2011-09-09 | Mako Surgical Corp. | System with brake to limit manual movement of member and control system for same |
| CN101822558B (zh) * | 2010-04-27 | 2012-06-27 | 天津理工大学 | 一种手术机器人系统 |
| CN103607968B (zh) * | 2011-05-31 | 2017-07-04 | 直观外科手术操作公司 | 机器人外科器械末端执行器的主动控制 |
| KR102184960B1 (ko) * | 2012-08-15 | 2020-12-01 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 로봇 암의 수동식 운동에 의해 제어되는 이동가능한 수술용 장착 플랫폼 |
| EP3824840A1 (en) | 2012-08-15 | 2021-05-26 | Intuitive Surgical Operations, Inc. | User initiated break-away clutching of a surgical mounting platform |
| JP6535653B2 (ja) * | 2013-03-15 | 2019-06-26 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | ゼロ空間を使用してデカルト座標空間の端へのアクセスを容易にするためのシステム及び方法 |
| US9283048B2 (en) | 2013-10-04 | 2016-03-15 | KB Medical SA | Apparatus and systems for precise guidance of surgical tools |
| CN106028994B (zh) * | 2014-02-20 | 2019-01-22 | 直观外科手术操作公司 | 由机器人手臂的手动运动控制的手术安装平台的受限移动 |
| US9597153B2 (en) | 2014-03-17 | 2017-03-21 | Intuitive Surgical Operations, Inc. | Positions for multiple surgical mounting platform rotation clutch buttons |
| US20160081753A1 (en) | 2014-09-18 | 2016-03-24 | KB Medical SA | Robot-Mounted User Interface For Interacting With Operation Room Equipment |
-
2013
- 2013-08-15 EP EP20198221.2A patent/EP3824840A1/en active Pending
- 2013-08-15 CN CN201380053748.1A patent/CN104717936B/zh active Active
- 2013-08-15 KR KR1020157006553A patent/KR102145801B1/ko active IP Right Grant
- 2013-08-15 KR KR1020207023019A patent/KR102283182B1/ko active IP Right Grant
- 2013-08-15 JP JP2015527626A patent/JP6247296B2/ja active Active
- 2013-08-15 US US13/967,594 patent/US9452020B2/en active Active
- 2013-08-15 CN CN201711403313.1A patent/CN107961076B/zh active Active
- 2013-08-15 WO PCT/US2013/055081 patent/WO2014028702A1/en active Application Filing
- 2013-08-15 EP EP13829146.3A patent/EP2884933B1/en active Active
-
2016
- 2016-09-08 US US15/259,951 patent/US10034718B2/en active Active
-
2018
- 2018-06-28 US US16/022,602 patent/US11432886B2/en active Active
-
2022
- 2022-07-27 US US17/875,266 patent/US20220361970A1/en active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06278066A (ja) * | 1993-03-31 | 1994-10-04 | Daihen Corp | ロボットの手動運転の制御方法及び制御装置 |
| WO2006124390A2 (en) * | 2005-05-19 | 2006-11-23 | Intuitive Surgical, Inc | Software center and highly configurable robotic systems for surgery and other uses |
| KR20080047318A (ko) * | 2005-05-19 | 2008-05-28 | 인튜어티브 서지컬 인코포레이티드 | 수술 및 다른 용도를 위한 소프트웨어 센터 및 고도로구성설정가능한 로봇 시스템 |
| US20070142823A1 (en) * | 2005-12-20 | 2007-06-21 | Intuitive Surgical Inc. | Control system for reducing internally generated frictional and inertial resistance to manual positioning of a surgical manipulator |
| KR20110005829A (ko) * | 2008-03-31 | 2011-01-19 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 수술 로봇 셋업 암에서의 힘과 토크의 감지 |
| JP2010058202A (ja) * | 2008-09-02 | 2010-03-18 | Yaskawa Electric Corp | ロボットの教示再生装置および教示再生方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2014028702A1 (en) | 2014-02-20 |
| KR20150045469A (ko) | 2015-04-28 |
| CN107961076B (zh) | 2020-07-07 |
| KR102145801B1 (ko) | 2020-08-28 |
| JP2015527137A (ja) | 2015-09-17 |
| EP2884933B1 (en) | 2020-10-07 |
| CN104717936A (zh) | 2015-06-17 |
| US11432886B2 (en) | 2022-09-06 |
| US10034718B2 (en) | 2018-07-31 |
| EP3824840A1 (en) | 2021-05-26 |
| CN104717936B (zh) | 2018-01-26 |
| US20160374768A1 (en) | 2016-12-29 |
| US20220361970A1 (en) | 2022-11-17 |
| JP6247296B2 (ja) | 2017-12-13 |
| KR102283182B1 (ko) | 2021-07-29 |
| US20140052154A1 (en) | 2014-02-20 |
| US9452020B2 (en) | 2016-09-27 |
| EP2884933A4 (en) | 2016-04-13 |
| EP2884933A1 (en) | 2015-06-24 |
| US20180303565A1 (en) | 2018-10-25 |
| CN107961076A (zh) | 2018-04-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102145801B1 (ko) | 수술용 장착 플랫폼의 사용자 개시 브레이크-어웨이 클러칭 | |
| US20210378770A1 (en) | Methods and devices for tele-surgical table registration | |
| JP6698184B2 (ja) | 手動でのロボットアームの運動によって制御される可動な手術用装着プラットフォーム | |
| KR102375479B1 (ko) | 수술 세트업 구조에서 불충분하게 작동되는 조인트의 운동을 제어하는 방법 | |
| US9597153B2 (en) | Positions for multiple surgical mounting platform rotation clutch buttons | |
| KR102636293B1 (ko) | 멀티포트 수술 로봇 시스템 구조 | |
| JP6559691B2 (ja) | ロボットアームの手動の動きによって制御される外科取付けプラットフォームの限定的な移動 | |
| US11571269B2 (en) | Surgeon disengagement detection during termination of teleoperation |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A107 | Divisional application of patent | ||
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right |