KR20200094817A - 이동 로봇 및 복수의 이동 로봇의 제어방법 - Google Patents
이동 로봇 및 복수의 이동 로봇의 제어방법 Download PDFInfo
- Publication number
- KR20200094817A KR20200094817A KR1020190006059A KR20190006059A KR20200094817A KR 20200094817 A KR20200094817 A KR 20200094817A KR 1020190006059 A KR1020190006059 A KR 1020190006059A KR 20190006059 A KR20190006059 A KR 20190006059A KR 20200094817 A KR20200094817 A KR 20200094817A
- Authority
- KR
- South Korea
- Prior art keywords
- mobile robot
- liquid
- cleaning
- area
- robot
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 93
- 239000007788 liquid Substances 0.000 claims abstract description 332
- 238000004140 cleaning Methods 0.000 claims abstract description 259
- 238000004891 communication Methods 0.000 claims abstract description 42
- 238000001514 detection method Methods 0.000 claims description 52
- 239000000428 dust Substances 0.000 description 34
- 238000005516 engineering process Methods 0.000 description 13
- 230000006870 function Effects 0.000 description 10
- 230000008901 benefit Effects 0.000 description 8
- 230000003287 optical effect Effects 0.000 description 8
- 230000001678 irradiating effect Effects 0.000 description 6
- 238000012545 processing Methods 0.000 description 6
- 238000013528 artificial neural network Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 5
- 238000010801 machine learning Methods 0.000 description 5
- 230000002093 peripheral effect Effects 0.000 description 5
- 239000000463 material Substances 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 230000035945 sensitivity Effects 0.000 description 3
- 238000012790 confirmation Methods 0.000 description 2
- 238000013135 deep learning Methods 0.000 description 2
- 230000007613 environmental effect Effects 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 239000003550 marker Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 238000003860 storage Methods 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 238000000342 Monte Carlo simulation Methods 0.000 description 1
- 235000004443 Ricinus communis Nutrition 0.000 description 1
- 238000004887 air purification Methods 0.000 description 1
- 238000013473 artificial intelligence Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 238000007418 data mining Methods 0.000 description 1
- 238000003066 decision tree Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000002068 genetic effect Effects 0.000 description 1
- 230000005283 ground state Effects 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 238000003703 image analysis method Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000003032 molecular docking Methods 0.000 description 1
- 210000002569 neuron Anatomy 0.000 description 1
- 230000001151 other effect Effects 0.000 description 1
- 238000005192 partition Methods 0.000 description 1
- 230000008447 perception Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 238000012549 training Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0084—Programme-controlled manipulators comprising a plurality of manipulators
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4011—Regulation of the cleaning machine by electric means; Control systems and remote control systems therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/008—Manipulators for service tasks
- B25J11/0085—Cleaning
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4072—Arrangement of castors or wheels
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2836—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means characterised by the parts which are controlled
- A47L9/2852—Elements for displacement of the vacuum cleaner or the accessories therefor, e.g. wheels, casters or nozzles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
- B25J5/007—Manipulators mounted on wheels or on carriages mounted on wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1656—Programme controls characterised by programming, planning systems for manipulators
- B25J9/1664—Programme controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1674—Programme controls characterised by safety, monitoring, diagnostic
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/246—Arrangements for determining position or orientation using environment maps, e.g. simultaneous localisation and mapping [SLAM]
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/648—Performing a task within a working area or space, e.g. cleaning
- G05D1/6484—Performing a task within a working area or space, e.g. cleaning by taking into account parameters or characteristics of the working area or space, e.g. size or shape
- G05D1/6486—Performing a task within a working area or space, e.g. cleaning by taking into account parameters or characteristics of the working area or space, e.g. size or shape by taking into account surface condition, e.g. soiled
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/69—Coordinated control of the position or course of two or more vehicles
- G05D1/698—Control allocation
- G05D1/6985—Control allocation using a lead vehicle, e.g. primary-secondary arrangements
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/04—Automatic control of the travelling movement; Automatic obstacle detection
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2105/00—Specific applications of the controlled vehicles
- G05D2105/10—Specific applications of the controlled vehicles for cleaning, vacuuming or polishing
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2107/00—Specific environments of the controlled vehicles
- G05D2107/40—Indoor domestic environment
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2109/00—Types of controlled vehicles
- G05D2109/10—Land vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Electric Vacuum Cleaner (AREA)
Abstract
본 발명은 본체를 이동시키는 주행부; 청소영역에 대한 장애물 지도가 저장되는 메모리; 상기 청소영역에 대한 정보를 수집하는 센싱부; 제1 이동로봇과 통신하는 통신부; 및 상기 제1 이동로봇으로부터 상기 청소영역 내에 존재하는 액체 영역 위치정보를 포함하는 장애물 지도가 수신되면, 상기 본체를 상기 액체 영역으로 이동한 후, 적어도 상기 액체 영역을 청소하도록 제어하는 제어부를 포함하는 것을 특징으로 한다.
Description
본 발명은 이동 로봇에 관한 것으로 상세하게는 복수의 이동 로봇 사이에 지도 공유 및 협업하여 청소를 수행할 수 있는 이동로봇에 관한 것이다.
로봇은 산업용으로 개발되어 공장 자동화의 일 부분을 담당하여 왔다. 최근에는 로봇을 응용한 분야가 더욱 확대되어, 의료용 로봇, 우주 항공 로봇 등이 개발되고, 일반 가정에서 사용할 수 있는 가정용 로봇도 만들어지고 있다. 이러한 로봇 중에서 자력으로 주행이 가능한 것을 이동 로봇이라고 한다. 가정에서 사용되는 이동 로봇의 대표적인 예는 로봇 청소기이다.
로봇 청소기에 구비된 여러 센서를 통하여 로봇 청소기 주변의 환경 및 사용자를 감지하는 여러 기술들이 알려져 있다. 또한, 로봇 청소기가 스스로 청소 영역을 학습하여 맵핑하고, 맵 상에서 현재 위치를 파악하는 기술들이 알려져 있다. 청소 영역을 기 설정된 방식으로 주행하며 청소하는 로봇 청소기가 알려져 있다.
종래의 로봇 청소기는 청소기의 주변 환경에서 장애물과 벽과의 거리 및 매핑을 위해, 거리판단, 지형 파악 및 장애물의 영상 파악이 용이한 광센서를 통해서 이를 식별해 왔다.
또한, 종래 기술(한국특허공개번호 10-2014-0138555)에는, 다수의 센서를 통해 맵을 작성하는 데, 복수의 로봇이 맵을 공유하는 경우, 각 로봇들은 초기 시작점을 중심으로 위치 인식하게 되고, 각 로봇들은 각각의 시작점을 가지고 있기 때문에 다른 로봇의 위치 및 환경 정보를 알 수 없는 문제점이 존재한다.
특히, 서로 다른 종류의 로봇의 경우, 맵을 작성하는 방법, 다수의 센서의 종류 및 감도 차이에 의해 같은 청소 구역에 대해 서로 다른 맵이 작성되고, 각각의 맵 사이의 사이즈, 좌표 방향 등이 일치되지 않는 문제점이 존재한다. 또한, 이렇게 각 맵이 상이한 경우, 협동 청소, 위치정보 공유 및 환경 정보 공유가 어렵게 되면, 협동 청소가 불가능한 문제점이 존재한다.
또한, 이와 같이 여러 대의 이동로봇을 이용한 협업 청소가 효율적으로 이루어지는 위해서는, 복수의 이동로봇이 각각 서로의 위치를 파악하고 있어야 할 것이다. 이를 위해, 초음파, 레이더 등의 위치 센서를 추가로 사용하여 서로의 상대 위치를 파악할 수도 있겠으나, 복수의 이동로봇의 이격거리가 멀어지면 상대 위치를 파악하기가 어려워지는 단점이 있다. 이러한 단점을 극복하기 위해 복수의 이동로봇들이 멀리 떨어져 있는 경우에도 서로의 위치를 정확하게 인식할 수 있는 고성능 센서를 탑재하게 되면 제품 전체의 비용이 증가하게 되는 단점이 있다.
또한, 복수의 이동로봇의 청소 방식이 서로 상이하여서, 청소구역 내에서 청소할 수 있는 영역과 청소를 할수 없는 영역이 발생할 수 있다. 구체적으로, 건식 청소기가 액체를 발견했을 경우, 건식 청소기가 청소를 수행하는 경우, 건식 청소기의 필터 등에 손상이 발생하거나, 점도가 높은 액체의 경우 청소가 안되는 문제점이 존재한다.
본 발명이 해결하고자 하는 과제는, 서로 다른 청소방식을 사용하는 복수의 이동로봇이 동일한 공간에서 협업하여 효율적으로 청소 할 수 있는 복수의 이동로봇의 제어방법을 제공하는 것이다.
본 발명이 해결하고자 하는 다른 과제는, 서로 다른 청소방식을 사용하는 복수의 이동로봇들이 청소영역에서 액체를 감지하는 경우, 협업하여 효율적으로 청소 할 수 있는 복수의 이동로봇의 제어방법을 제공하는 것이다
본 발명이 해결하고자 하는 또 다른 과제는, 서로 다른 청소방식을 사용하는 복수의 이동로봇들 중 어느 하나가 다른 하나에 액체 영역의 위치를 정확하게 전달하기 위한 복수의 이동로봇의 제어방법을 제공하는 것이다
본 발명이 해결하고자 하는 또 다른 과제는, 서로 다른 청소방식을 사용하는 복수의 이동로봇들 중 어느 하나가 다른 하나에 액체 영역의 위치를 정확하게 전달하기 위한 복수의 이동로봇의 제어방법을 제공하는 것이다
본 발명이 해결하고자 하는 또 다른 과제는, 복수의 이동로봇이 동일한 공간에 대해 서로 다른 청소 맵을 사용하는 경우에 서로 다른 청소 맵들을 서로 효율적이고 정확하게 매칭시키는 이동로봇을 제공하는 것이다.
상기 과제들을 해결하기 위하여, 본 발명은 액체 영역 정보가 포함된 장애물 지도를 수신하면, 액체 영역을 청소하는 것이다.
구체적으로, 본 발명은 본체를 이동시키는 주행부; 청소영역에 대한 장애물 지도가 저장되는 메모리; 상기 청소영역에 대한 정보를 수집하는 센싱부; 제1 이동로봇과 통신하는 통신부; 및 상기 제1 이동로봇으로부터 상기 청소영역 내에 존재하는 액체 영역 위치정보를 포함하는 장애물 지도가 수신되면, 상기 본체를 상기 액체 영역으로 이동한 후, 적어도 상기 액체 영역을 청소하도록 제어하는 제어부를 포함한다.
상기 제어부는, 상기 장애물 지도에서 상기 액체 영역의 좌표 값을 바탕으로 상기 액체 영역을 특정할 수 있다.
상기 액체 영역 위치정보는 상기 액체 영역 주변의 이미지를 포함하고, 상기 제어부는, 상기 센싱부에서 입력된 상기 본체 주변의 영상을 바탕으로 상기 액체 영역을 특정할 수 있다.
상기 제어부는 상기 장애물 지도에서 상기 액체 영역의 좌표와 상기 통신부와 상기 제1 이동로봇 사이의 수신신호 강도(RSSI)를 바탕으로 상기 액체 영역을 특정할 수 있다.
상기 액체 영역 위치정보는 상기 액체 영역에서 라우터와 상기 제1 이동로봇 사이의 수신신호 강도 값을 포함하고, 상기 제어부는, 상기 장애물 지도에서 상기 액체 영역의 좌표와 상기 라우터와 상기 제2 이동로봇 사이의 수신신호 강도(RSSI) 값을 바탕으로 상기 액체 영역을 특정할 수 있다.
본 발명은 액체를 감지하는 액체 감지센서를 더 포함하고, 상기 제어부는, 상기 장애물 지도에서 상기 액체 영역의 좌표와 상기 라우터와 상기 액체 감지센서에서 감지된 감지 값을 바탕으로 상기 액체 영역을 특정할 수 있다.
상기 제어부는, 상기 액체 영역의 청소를 완료 후에, 상기 본체가 상기 제1 이동로봇을 따라가며 청소하도록 상기 주행부를 제어할 수 있다.
상기 제어부는, 상기 액체 영역의 청소를 완료 후에, 상기 본체가 정 위치로 복귀하도록 상기 주행부를 제어할 수 있다.
또한, 본 발명은 제1 이동 로봇과 상기 제1 이동 로봇과 청소 방식이 상이한 제2 이동 로봇을 포함하는 복수의 이동 로봇의 제어방법에 있어서, 상기 제1 이동 로봇이 청소 영역 내에 존재하는 액체를 감지하는 단계; 상기 제1 이동 로봇이 액체를 감지하면, 상기 제2 이동 로봇으로 액체 영역 위치정보를 포함하는 장애물 지도와 상기 액체 영역 청소명령을 송신하는 단계; 상기 제2 이동 로봇이 상기 액체 영역 청소명령을 수신하면, 상기 제2 이동 로봇이 상기 액체 영역으로 이동하는 단계; 및 상기 제2 이동 로봇이 상기 액체 위치 영역을 청소하는 단계를 포함한다.
상기 제2 이동 로봇이 상기 장애물 지도에서 상기 액체 영역의 좌표 값, 상기 액체 영역 주변의 이미지, 상기 제1 이동 로봇과 상기 제2 이동 로봇 사이의 수신신호 강도 값 및 라우터와 상기 각 이동 로봇들 사이의 수신신호 강도 값 중 적어도 하나를 바탕으로 상기 액체 영역을 특정하는 단계를 더 포함할 수 있다.
상기 제1 이동 로봇은, 상기 제2 이동 로봇이 상기 액체 영역으로 이동을 완료할 때까지, 상기 액체 영역의 주변에서 대기할 수 있다.
상기 제1 이동 로봇은 상기 제2 이동 로봇이 상기 액체 영역의 청소를 완료한 후에 상기 액체 영역에 액체가 존재하는 지 판단하는 단계를 더 포함할 수 있다.
상기 제1 이동 로봇은 상기 제2 이동 로봇이 상기 액체 영역의 청소를 완료한 후에 상기 액체 영역에 액체가 존재한다고 판단하는 경우, 상기 제2 이동 로봇에 상기 액체 영역의 재청소를 명령하는 신호를 송신하는 단계를 더 포함할 수 있다.
본 발명은 상기 제1 이동 로봇은 상기 제2 이동 로봇이 상기 액체 영역의 청소를 완료한 후에 상기 액체 영역에 액체가 존재하지 않는다고 판단하는 경우, 상기 청소 영역에 대한 청소를 수행하는 단계를 더 포함할 수 있다.
또한, 본 발명은 상기 제2 이동 로봇은 상기 액체 영역에 대한 청소를 완료한 후, 상기 제1 이동 로봇을 따라가며 청소하는 단계를 더 포함할 수 있다.
또한, 본 발명은 상기 제2 이동 로봇은, 상기 액체 영역에 대한 청소를 완료한 후, 정 위치로 복귀하는 단계를 더 포함할 수 있다.
상기 제1 이동 로봇은, 상기 제2 이동 로봇으로 상기 액체 영역 청소명령을 송신 한 후, 상기 액체 영역을 제외한 상기 청소 영역에 대한 청소를 수행하는 단계를 더 포함할 수 있다.
또한, 본 발명은 제1 이동 로봇과 상기 제1 이동 로봇과 청소 방식이 상이한 제2 이동 로봇을 포함하는 복수의 이동 로봇의 제어방법에 있어서, 상기 제1 이동 로봇이 청소 영역 내에 존재하는 액체를 감지하는 단계; 상기 제1 이동 로봇이 액체 영역을 제외한 상기 청소 영역에 대한 청소를 완료하고 정 위치로 복귀하는 단계; 상기 제1 이동 로봇이 액체를 감지하면, 상기 제2 이동 로봇으로 액체 영역 위치정보를 포함하는 장애물 지도와 상기 액체 영역 청소명령을 송신하는 단계; 상기 제2 이동 로봇이 상기 액체 영역 청소명령을 수신하면, 상기 제2 이동 로봇이 상기 액체 영역으로 이동하는 단계; 및 상기 제2 이동 로봇이 상기 액체 영역을 청소하는 단계를 포함할 수 있다.
여기서, 상기 제2 이동 로봇은, 상기 액체 영역에 대한 청소를 완료한 후, 정 위치로 복귀하는 단계를 더 포함할 수 있다.
또한, 본 발명은 제1 이동 로봇과 상기 제1 이동 로봇과 청소 방식이 상이한 제2 이동 로봇을 포함하는 복수의 이동 로봇의 제어방법에 있어서, 상기 제1 이동 로봇이 청소 영역 내에 존재하는 액체를 감지하는 단계; 상기 제1 이동 로봇이 액체 영역을 제외한 상기 청소 영역에 대한 청소를 완료하고 상기 제2 이동 로봇 주변으로 이동하는 단계; 상기 제1 이동 로봇이 액체를 감지하면, 상기 제2 이동 로봇으로 추종명령을 송신하고, 상기 액체 영역으로 이동하는 단계; 상기 추종명령을 수신하면, 상기 제2 이동 로봇이 상기 제1 이동 로봇을 따라서 상기 액체 영역으로 이동하는 단계; 및 상기 제1 이동 로봇이 상기 액체 영역에 도착 한 후, 상기 제2 이동 로봇이 상기 제1 이동 로봇 주변 기설정된 영역을 청소하는 단계를 포함할 수 있다.
본 발명의 이동 로봇에 따르면 다음과 같은 효과가 하나 혹은 그 이상 있다.
첫째, 본 발명은 서로 다른 방식으로 청소하는 이동로봇이 각자 자기가 청소 가능한 영역과 청소가 불가능한 영역을 구분하여, 청소 영역의 상태에 따라 알맞은 청소를 수행할 수 있는 이점이 존재한다.
둘째, 본 발명은 건식 청소기가 청소 중에 액체류를 발견한 경우, 액체류 청소에 특화된 습식 청소기가 액체를 청소하여서, 건식 청소기가 액체류를 흡입하여서 발생하는 건식 청소기의 흡입률 저하 및 필터의 손상을 방지하고, 액체를 효과적으로 제거할 수 있는 이점이 존재한다.
셋째, 본 발명은 습도센서, 카메라 등으로 액체류를 정확하게 감지하여서, 습식 청소기가 점도가 높은 액체류를 청소할 때, 청소가 완료될 때까지 반복하여 청소하여서, 액체류에 대해 완벽한 청소를 수행할 수 있는 이점이 존재한다.
넷째, 본 발명은 건식 청소기가 액체 영역의 주변에 대기하고, 습식 청소기가 건식 청소기와의 통신 신호 강도에 따라 액체 영역을 특정하여서, 좌표 값만으로 습식 청소기가 정확한 액체 영역을 찾지 못하는 것을 방지할 수 있는 이점이 존재한다.
다섯째, 본 발명은 라우터와의 통신 신호 강도 값 및 액체 영역 주변의 이미지를 바탕으로 액체 영역의 위치를 보강하여서, 건식 청소기가 다른 일을 하더라도, 습식 청소기가 액체 영역으로 정확하게 이동할 수 있는 이점이 존재한다.
여섯째, 본 발명은 건식 청소기가 액체를 감지하면, 청소를 완료 후 정 위치로 복위하여서, 습식 청소기를 이끌고, 다시 액체 영역으로 돌아가서 액체 영역을 청소하므로, 건식 청소기가 습식 청소기에 장애물 지도를 전달할 필요가 없고, 습식 청소기가 액체 영역으로 정확하게 이동할 수 있는 이점이 존재한다.
일곱째, 본 발명은 서로 다른 이동 로봇이 동일한 공간에 대해 수집한 이종의 청소 맵을 인공표식을 이용하여 효율적이고 정확하게 매칭시킬 수 있는 장점이 있다.
본 발명의 효과들은 이상에서 언급한 효과들로 제한되지 않으며, 언급되지 않은 또 다른 효과들은 청구범위의 기재로부터 당업자에게 명확하게 이해될 수 있을 것이다.
도 1은 본 발명에 따른 로봇 청소기의 일 예를 보인 사시도이다.
도 2는 도 1에 도시된 로봇 청소기의 평면도이다.
도 3은 도 1에 도시된 로봇 청소기의 측면도이다.
도 4는 본 발명의 일 실시예에 따른 로봇 청소기의 예시 구성요소를 나타내는 블록도이다.
도 5a는 본 발명의 일 실시예에 따른 복수의 로봇 청소기 간의 네트워크 통신을 도시한 개념도이고, 도 5b는 도 5a의 네트워크 통신의 일 예를 도시한 개념도이다.
도 5c는 본 발명의 일 실시예에 따른 복수의 로봇 청소기 간의 추종 제어를 설명하기 위한 도면이다.
도 6은 본 발명의 일 실시예에 따른 복수의 로봇 청소기가 협업청소를 위한 방법을 설명하기 위한 대표 흐름도이다.
도 7은 본 발명의 일 실시예에 따른 복수의 로봇 청소기의 협업청소를 도시한 개념도이다.
도 8은 본 발명의 제1 실시예에 따른 복수의 로봇 청소기의 제어방법의 순서도이다.
도 9는 본 발명의 제2 실시예에 따른 복수의 로봇 청소기의 제어방법의 순서도이다.
도 10은 본 발명의 제3 실시예에 따른 복수의 로봇 청소기의 제어방법의 순서도이다.
도 11은 본 발명의 제4 실시예에 따른 복수의 로봇 청소기의 제어방법의 순서도이다.
도 2는 도 1에 도시된 로봇 청소기의 평면도이다.
도 3은 도 1에 도시된 로봇 청소기의 측면도이다.
도 4는 본 발명의 일 실시예에 따른 로봇 청소기의 예시 구성요소를 나타내는 블록도이다.
도 5a는 본 발명의 일 실시예에 따른 복수의 로봇 청소기 간의 네트워크 통신을 도시한 개념도이고, 도 5b는 도 5a의 네트워크 통신의 일 예를 도시한 개념도이다.
도 5c는 본 발명의 일 실시예에 따른 복수의 로봇 청소기 간의 추종 제어를 설명하기 위한 도면이다.
도 6은 본 발명의 일 실시예에 따른 복수의 로봇 청소기가 협업청소를 위한 방법을 설명하기 위한 대표 흐름도이다.
도 7은 본 발명의 일 실시예에 따른 복수의 로봇 청소기의 협업청소를 도시한 개념도이다.
도 8은 본 발명의 제1 실시예에 따른 복수의 로봇 청소기의 제어방법의 순서도이다.
도 9는 본 발명의 제2 실시예에 따른 복수의 로봇 청소기의 제어방법의 순서도이다.
도 10은 본 발명의 제3 실시예에 따른 복수의 로봇 청소기의 제어방법의 순서도이다.
도 11은 본 발명의 제4 실시예에 따른 복수의 로봇 청소기의 제어방법의 순서도이다.
본 발명의 이점 및 특징, 그리고 그것들을 달성하는 방법은 첨부되는 도면과 함께 상세하게 후술되어 있는 실시예들을 참조하면 명확해질 것이다. 그러나 본 발명은 이하에서 개시되는 실시예들에 한정되는 것이 아니라 서로 다른 다양한 형태로 구현될 수 있으며, 단지 본 실시예들은 본 발명의 개시가 완전하도록 하고, 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자에게 발명의 범주를 완전하게 알려주기 위해 제공되는 것이며, 본 발명은 청구항의 범주에 의해 정의될 뿐이다. 명세서 전체에 걸쳐 동일 참조 부호는 동일 구성 요소를 지칭한다.
공간적으로 상대적인 용어인 "아래(below)", "아래(beneath)", "하부(lower)", "위(above)", "상부(upper)" 등은 도면에 도시되어 있는 바와 같이 하나의 구성 요소들과 다른 구성 요소들과의 상관관계를 용이하게 기술하기 위해 사용될 수 있다. 공간적으로 상대적인 용어는 도면에 도시되어 있는 방향에 더하여 사용시 또는 동작 시 구성요소의 서로 다른 방향을 포함하는 용어로 이해되어야 한다. 예를 들면, 도면에 도시되어 있는 구성요소를 뒤집을 경우, 다른 구성요소의 "아래(below)"또는 "아래(beneath)"로 기술된 구성요소는 다른 구성요소의 "위(above)"에 놓여질 수 있다. 따라서, 예시적인 용어인 "아래"는 아래와 위의 방향을 모두 포함할 수 있다. 구성요소는 다른 방향으로도 배향될 수 있고, 이에 따라 공간적으로 상대적인 용어들은 배향에 따라 해석될 수 있다.
본 명세서에서 사용된 용어는 실시예들을 설명하기 위한 것이며 본 발명을 제한하고자 하는 것은 아니다. 본 명세서에서, 단수형은 문구에서 특별히 언급하지 않는 한 복수형도 포함한다. 명세서에서 사용되는 "포함한다(comprises)" 및/또는 "포함하는(comprising)"은 언급된 구성요소, 단계 및/또는 동작은 하나 이상의 다른 구성요소, 단계 및/또는 동작의 존재 또는 추가를 배제하지 않는다.
다른 정의가 없다면, 본 명세서에서 사용되는 모든 용어(기술 및 과학적 용어를 포함)는 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자에게 공통적으로 이해될 수 있는 의미로 사용될 수 있을 것이다. 또 일반적으로 사용되는 사전에 정의되어 있는 용어들은 명백하게 특별히 정의되어 있지 않은 한 이상적으로 또는 과도하게 해석되지 않는다.
본 발명인 이동 로봇(100)은 바퀴 등을 이용하여 스스로 이동이 가능한 로봇을 의미하고, 가정 도우미 로봇 및 로봇 청소기 등이 될 수 있다.
이하, 본 발명에 관련된 로봇 청소기에 대하여 도면을 참조하여 보다 상세하게 설명한다.
첨부된 도면을 참조하여 본 명세서에 개시된 실시 예를 상세히 설명하되, 본 명세서에서 사용되는 기술적 용어는 단지 특정한 실시 예를 설명하기 위해 사용된 것으로, 본 명세서에 개시된 기술의 사상을 한정하려는 의도가 아님을 유의해야 한다.
본 발명에 따른 이동로봇(100)의 일 예를 보인 사시도이고, 도 2는 도 1에 도시된 이동로봇(100)의 평면도이며, 도 3은 도 1에 도시된 로봇 청소기(100)의 측면도이다.
본 명세서에서 이동 로봇, 이동로봇 및 자율 주행을 수행하는 청소기가 동일한 의미로 사용될 수 있다. 또한, 본 명세서에서 복수의 청소기는 이하 도 1 내지 도 3에 도시된 구성 중 적어도 일부를 포함하여 이루어질 수 있다.
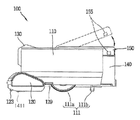
도 1 내지 도 3을 참조하면, 로봇 청소기(100)는 일정 영역을 스스로 주행하면서 바닥을 청소하는 기능을 수행한다. 여기서 말하는 바닥의 청소에는, 바닥의 먼지(이물질을 포함한다)를 흡입하거나 바닥을 걸레질하는 것이 포함된다.
로봇 청소기(100)는 청소기 본체(110), 청소 유닛(120), 센싱유닛(130) 및 먼지통(140)을 포함할 수 있다. 청소기 본체(110)에는 로봇 청소기(100)의 제어를 위한 제어부(1800)를 포함하여 각종 부품들이 내장 또는 장착된다. 또한, 청소기 본체(110)에는 로봇 청소기(100)의 주행을 위한 휠 유닛(111)이 구비된다. 휠 유닛(111)에 의해 로봇 청소기(100)는 전후좌우로 이동되거나 회전될 수 있다.
도 3을 참조하면, 휠 유닛(111)은 메인 휠(111a) 및 서브 휠(111b)을 포함한다.
메인 휠(111a)은 청소기 본체(110)의 양측에 각각 구비되어, 제어부의 제어 신호에 따라 일 방향 또는 타 방향으로 회전 가능하게 구성된다. 각각의 메인 휠(111a)은 서로 독립적으로 구동 가능하게 구성될 수 있다. 예를 들어, 각각 의 메인 휠(111a)은 서로 다른 모터에 의해서 구동될 수 있다. 또는, 하나의 모터에 구비된 복수의 서로 다른 축에 의해서 구동될 수 있다.
서브 휠(111b)은 메인 휠(111a)과 함께 청소기 본체(110)를 지지하며, 메인 휠(111a)에 의한 로봇 청소기(100)의 주행을 보조하도록 이루어진다. 이러한 서브 휠(111b)은 후술하는 청소 유닛(120)에도 구비될 수 있다.
제어부는 휠 유닛(111)의 구동을 제어함으로써, 로봇 청소기(100)는 바닥을 자율 주행하도록 이루어진다.
한편, 청소기 본체(110)에는 로봇 청소기(100)에 전원을 공급하는 배터리(미도시)가 장착된다. 배터리는 충전 가능하게 구성되며, 청소기 본체(110)의 저면부에 착탈 가능하게 구성될 수 있다.
도 1에서, 청소 유닛(120)은 청소기 본체(110)의 일측으로부터 돌출된 형태로 배치되어, 먼지가 포함된 공기를 흡입하거나 또는 걸레질을 할 수 있다. 일측은 청소기 본체(110)가 정방향(F)으로 주행하는 측, 즉 청소기 본체(110)의 앞쪽이 될 수 있다.
본 도면에서는, 청소 유닛(120)이 청소기 본체(110)의 일측에서 전방 및 좌우 양측방으로 모두 돌출된 형태를 가지는 것을 보이고 있다. 구체적으로, 청소 유닛(120)의 전단부는 청소기 본체(110)의 일측으로부터 전방으로 이격된 위치에 배치되고, 청소 유닛(120)의 좌우 양단부는 청소기 본체(110)의 일측으로부터 좌우 양측으로 각각 이격된 위치에 배치된다.
청소기 본체(110)가 원형으로 형성되고, 청소 유닛(120)의 후단부 양측이 청소기 본체(110)로부터 좌우 양측으로 각각 돌출 형성됨에 따라, 청소기 본체(110)와 청소 유닛(120) 사이에는 빈 공간, 즉 틈이 형성될 수 있다. 빈 공간은 청소기 본체(110)의 좌우 양단부와 청소 유닛(120)의 좌우 양단부 사이의 공간으로서, 로봇 청소기(100)의 내측으로 리세스된 형태를 가진다.
상술한 빈 공간에 장애물이 끼이는 경우, 로봇 청소기(100)가 장애물에 걸려 움직이지 못하는 문제가 초래될 수 있다. 이를 방지하기 위하여, 커버 부재(129)가 빈 공간의 적어도 일부를 덮도록 배치될 수 있다.
커버부재(129)는 청소기 본체(110) 또는 청소 유닛(120)에 구비될수 있다. 본 실시예에서는, 청소 유닛(120)의 후단부 양측에 각각 커버부재(129)가 돌출 형성되어, 청소기 본체(110)의 외주면을 덮도록 배치된 것을 보이고 있다.
커버부재(129)는 빈 공간, 즉 청소기 본체(110)와 청소 유닛(120) 간의 빈 공간의 적어도 일부를 메우도록 배치된다. 따라서, 빈 공간에 장애물이 끼이는 것이 방지되거나, 빈 공간에 장애물이 끼이더라도 장애물로 부터 용이하게 이탈 가능한 구조가 구현될 수 있다.
청소 유닛(120)에서 돌출 형성된 커버부재(129)는 청소기 본체(110)의 외주면에 지지될 수 있다. 만일, 커버부재(129)가 청소기 본체(110)에서 돌출 형성되는 경우라면, 커버부재(129)는 청소 유닛(120)의 후면부에 지지될 수 있다. 구조에 따 르면, 청소 유닛(120)이 장애물과 부딪혀 충격을 받았을 때, 그 충격의 일부가 청소기 본체(110)로 전달되어 충격이 분산될 수 있다.
청소 유닛(120)은 청소기 본체(110)에 착탈 가능하게 결합될 수 있다. 청소 유닛(120)이 청소기 본체(110)로 분리되면, 분리된 청소 유닛(120)을 대체하여 걸레 모듈(미도시)이 청소기 본체(110)에 착탈 가능하게 결합될 수 있다.
따라서, 사용자는 바닥의 먼지를 제거하고자 하는 경우에는 청소기 본체(110)에 청소 유닛(120)을 장착하고, 바닥을 닦고자 하는 경우에는 청소기 본체(110)에 걸레 모듈을 장착할 수 있다.
실시예는 액체를 감지하는 액체 감지센서를 더 포함할 수 있다. 액체 감지센서는 청소 유닛(120)의 전방 하단에 배치되어서, 액체류가 청소 유닛(120)으로 흡입되는 것을 방지하고, 액체류를 신속하게 발견하여서, 액체류 위를 청소기 본체(110)가 주행하지 못하게 할 수 있다.
액체 감지센서는 액체를 감지하는 다양한 구성을 포함할 수 있다. 일 예로, 액체 감지센서는 습도센서를 포함할 수 있다. 습도센서는 전기 저항식 습도센서 또는 전기 용량식 습도센서가 사용될 수 있다.
다른 예로, 액체 감지센서는 감지부(미도시)가 물이 접촉하면 전기저항이 변하는 것을 이용하여 액체를 감지할 수 있다. 액체 감지센서의 감지부는 청소 유닛(120)의 전방 하단에 배치되는 것이 바람직하다.
또 다른 예로, 액체 감지센서는 저항선과 전도선을 포함하고, 액체의 전도성에 의해 저항선 또는 전도선에 쇼트가 일어나는 것을 감지하는 방식으로 구현될 수도 있다.
청소 유닛(120)이 청소기 본체(110)에 장착시, 상술한 커버부재(129)에 의해 장착이 가이드될 수 있다. 즉, 커버부재(129)가 청소기 본체(110)의 외주면을 덮도록 배치됨으로써, 청소기 본체(110)에 대한 청소 유닛(120)의 상대적 위치가 결정될 수 있다.
청소 유닛(120)에는 캐스터(castor, 123)가 구비될 수 있다. 캐스터(123)는 로봇 청소기(100)의 주행을 보조하고, 또한 로봇 청소기(100)를 지지하도록 이루어진다. 청소기 본체(110)에는 센싱 유닛(130)이 배치된다. 도시된 바와 같이, 센싱 유닛(130)은 청소 유닛(120)이 위치하는 청소기 본체(110)의 일측, 즉 청소기 본체(110)의 앞쪽에 배치될 수 있다.
센싱 유닛(130)은 청소기 본체(110)의 상하 방향으로 청소 유닛(120)과 오버랩되도록 배치될 수 있다. 센싱 유닛(130)은 청소 유닛(120)의 상부에 배치되어, 로봇 청소기(100)의 가장 앞쪽에 위치하는 청소 유닛(120)이 장애물과 부딪히지 않도록 전방의 장애물이나 지형지물 등을 감지하도록 이루어진다.
센싱 유닛(130)은 이러한 감지 기능 외의 다른 센싱 기능을 추가로 수행하도록 구성될 수 있다. 예로써, 센싱 유닛(130)은 주변의 영상을 획득하기 위한 카메라(131)를 포함할 수 있다. 카메라(131)는 렌즈와 영상 센서(image sensor)를 포함할 수 있다. 또한, 카메라(131)는 청소기 본체(110) 주변의 영상을 제어부(1800)가 처리할수 있는 전기적 신호로 변환하며, 예를 들어 상방 영상에 대응되는 전기적 신호를 제어부(1800)에 전달할 수 있다. 상방 영상에 대응되는 전기적 신호는 제어부(1800)가 청소기 본체(110)의 위치를 검출하는데 사용될 수 있다.
또한, 센싱 유닛(130)은 로봇 청소기(100)의 주행 면상 또는 주행 경로 상의 벽체, 가구, 및 낭떠러지 등의 장애물을 감지할 수 있다. 또한, 센싱 유닛(130)은 배터리 충전을 수행하는 도킹 기기의 존재를 감지할 수 있다. 또한, 센싱 유닛(130)은 천장 정보를 감지하여서, 로봇 청소기(100)의 청소 영역 또는 청소 구역을 맵핑(Mapping)할 수 있다.
청소기 본체(110)에는 흡입된 공기 중의 먼지를 분리하여 집진하는 먼지통(140)이 착탈 가능하게 결합된다. 또한, 먼지통(140)에는 먼지통(140)을 덮는 먼지통 덮개(150)가 구비된다. 일 실시예로, 먼지통 덮개(150)는 청소기 본체(110)에 힌지 결합되어 회동 가능하게 구성될 수 있다. 먼지통 덮개(150)는 먼지통(140) 또는 청소기 본체(110)에 고정되어 먼지통(140)의 상면을 덮은 상태를 유지할 수 있다. 먼지통 덮개(150)가 먼지통(140)의 상면을 덮도록 배치된 상태에서는, 먼지통 덮개(150)에 의해 먼지통(140)이 청소기 본체(110)로부터 분리되는 것이 방지될 수 있다.
먼지통(140)의 일부는 먼지통 수용부(113)에 수용되되, 먼지통(140)의 다른 일부는 청소기 본체(110)의 후방(즉, 정방향(F)에 반대되는 역방향(R))을 향하여 돌출되게 형성될 수 있다.
먼지통(140)에는 먼지가 포함된 공기가 유입되는 입구와 먼지가 분리된 공기가 배출되는 출구가 형성되며, 청소기 본체(110)에 먼지통(140)의 장착시 입구와 출구는 본체(110)의 내측벽에 형성된 개구(155)를 통해 연통되도록 구성된다. 이에 의하여, 청소기 본체(110) 내부의 흡기유로와 배기유로가 형성될 수 있다.
이러한 연결관계에 따라, 청소 유닛(120)을 통하여 유입된 먼지가 포함된 공기는 청소기 본체(110) 내부의 흡기유로를 거쳐, 먼지통(140)으로 유입되고, 먼지통(140)의 필터 내지는 사이클론을 거치면서 공기와 먼지가 상호 분리된다. 먼지는 먼지통(140)에 집진되며, 공기는 먼지통(140)에서 배출된 후 청소기 본체(110) 내부의 배기유로를 거쳐 최종적으로 배기구(112)를 통하여 외부로 배출된다.
이하의 도 4에서는 로봇 청소기(100)의 구성요소와 관련된 일 실시예가 설명된다.
본 발명의 일 실시 예에 따른 로봇 청소기(100)는, 통신부(1100), 입력부(1200), 주행부(1300), 센싱부(1400), 출력부(1500), 전원부(1600), 메모리(1700), 제어부(1800), 청소부(1900) 중 적어도 하나 또는 이들의 조합을 포함할 수 있다.
이때, 도 4에 도시한 구성요소들이 필수적인 것은 아니어서, 그보다 많은 구성요소들을 갖거나 그보다 적은 구성요소들을 갖는 이동로봇이 구현될 수 있음은 물론이다. 또한, 전술한 바와 같이, 본 발명에서 설명되는 복수의 로봇 청소기는 이하에서 설명된 구성요소들 중 일부만 동일한 구성요소를 포함할 수 있다. 즉, 복수의 이동로봇이 각각 서로 다른 구성요소로 이루어질 수 있다.
이하, 각 구성요소들에 대해 살펴보기로 한다. 우선, 전원부(1600)는 외부 상용 전원에 의해 충전 가능한 배터리를 구비하여 이동 로봇 내로 전원을 공급한다. 전원부(1600)는 이동 로봇에 포함된 각 구성들에 구동 전원을 공급하여, 이동 로봇이 주행하거나 특정 기능을 수행하는데 요구되는 동작 전원을 공급할 수 있다.
이때, 제어부(1800)는 배터리의 전원 잔량을 감지하고, 전원 잔량이 부족하면 외부 상용 전원과 연결된 충전대로 이동하도록 제어하여, 충전대로부터 충전 전류를 공급받아 배터리를 충전할 수 있다. 배터리는 배터리 감지부와 연결되어 배터리 잔량 및 충전 상태가 제어부(1800)에 전달될 수 있다. 출력부(1500)은 제어부(1800)에 의해 배터리 잔량을 출력부(1500)에 표시할 수 있다.
배터리는 이동로봇 중앙의 하부에 위치할 수도 있고, 좌, 우측 중 어느 한쪽에 위치할 수도 있다. 후자의 경우, 이동 로봇은 배터리의 무게 편중을 해소하기 위해 균형추를 더 구비할 수 있다.
제어부(1800)는, 인공 지능 기술에 기반하여 정보들을 처리하는 역할을 수행하는 것으로, 정보의 학습, 정보의 추론, 정보의 지각, 자연 언어의 처리 중 적어도 하나를 수행하는 하나 이상의 모듈을 포함할 수 있다.
제어부(1800)는 머신 러닝(machine running) 기술을 이용하여, 청소기 내에 저장된 정보, 이동 단말기 주변의 환경 정보, 통신 가능한 외부 저장소에 저장된 정보 등 방대한 양의 정보(빅데이터, big data)를 학습, 추론, 처리 중 적어도 하나를 수행할 수 있다.
그리고, 제어부(1800)는 머신 러닝 기술을 이용하여 학습된 정보들을 이용하여, 실행 가능한 적어도 하나의 청소기의 동작을 예측(또는 추론)하고, 적어도 하나의 예측된 동작들 중 실현성이 가장 높은 동작이 실행되도록 청소기를 제어할 수 있다. 머신 러닝 기술은 적어도 하나의 알고리즘에 근거하여, 대규모의 정보들을 수집 및 학습하고, 학습된 정보를 바탕으로 정보를 판단 및 예측하는 기술이다.
정보의 학습이란 정보들의 특징, 규칙, 판단 기준 등을 파악하여, 정보와 정보 사이의 관계를 정량화하고, 정량화된 패턴을 이용하여 새로운 데이터들을 예측 하는 동작이다.
머신 러닝 기술이 사용하는 알고리즘은 통계학에 기반한 알고리즘이 될 수 있으며, 예를 들어, 트리 구조 형태를 예측 모델로 사용하는 의사 결정 나무(decision tree), 생물의 신경 네트워크 구조와 기능을 모방하는 인공 신경망(neural network), 생물의 진화 알고리즘에 기반한 유전자 프로그래밍(genetic programming), 관측된 예를 군집이라는 부분집합으로 분배하는 군집화(Clustering), 무작위로 추출된 난수를 통해 함수값을 확률로 계산하는 몬테카를로 방법(Monter carlo method) 등이 될 수 있다.
머신 러닝 기술의 한 분야로써, 딥러닝 기술은 인공 신경망(Deap Neuron Network, DNN) 알고리즘을 이용하여, 정보들을 학습, 판단, 처리 중 적어도 하나를 수행하는 기술이다. 인공 신경망(DNN)은 레이어와 레이어 사이를 연결하고, 레이어와 레이어 사이의 데이터를 전달하는 구조를 가질 수 있다. 이러한 딥러닝 기술은 병렬 연산에 최적화된 GPU(graphic processing unit)를 이용하여 인공 신경망(DNN)을 통하여 방대한 양의 정보를 학습할 수 있다.
제어부(1800)는 외부의 서버 또는 메모리에 저장된 트레이닝 데이터를 이용하며, 소정의 물체를 인식하기 위한 특징을 검출하는 학습 엔진을 탑재할 수 있다. 이때, 물체를 인식하기 위한 특징에는 물체의 크기, 형태 및 음영 등을 포함할 수 있다.
구체적으로, 제어부(1800)는 청소기에 구비된 카메라를 통해 획득된 영상 중 일부를 학습 엔진에 입력하면, 학습 엔진은 입력된 영상에 포함된 적어도 하나의 사물 또는 생명체를 인식할 수 있다. 더욱 구체적으로, 제어부(1800)는 사물로 인식된 것 중에 인공표식을 다양한 방법을 통해 인식할 수 있다.
여기서, 인공표식은 인공적으로 표시된 모양, 기호 등을 포함할 수 있다. 인공표식은 적어도 2개의 선분을 포함할 수 있다. 구체적으로, 인공 표식은 2개 이상의 직선, 곡선의 조합을 포함할 수 있다. 바람직하게는, 인공 표식은, 다각형, 별 모양, 사물의 특정한 외관일 수 있다. 인공표식의 크기는 벽 및 천장 보다 작은 크기일 수 있다. 바람직하게는 인공표식의 크기는 벽 또는 천장의 크기 대비 1% 내지 5% 일 수 있다.
구체적으로, 제어부(1800)는 청소영역 내에서 수집된 이미지를 분석하여, 수집된 이미지 중 이동 불가능한 모양을 판단하고, 이동 불가능한 모양으로 판단된 모양 중 적어도 하나를 인공 표식으로 특정할 수 있다. 이동 불가능한 모양이란 이동 불가능한 사물에 표시된 모양을 의미한다. 이렇게 이동 불가능한 사물에 표시된 모양을 인공 표식으로 인식함으로 인해, 인공 표식의 이동으로 인해 발생하는 장애물 지도의 미스 매칭을 방지할 수 있다.
또한, 제어부(1800)는 청소영역 내에서 수집된 이미지를 분석하여, 수집된 이미지 중 벽 또는 천장에 위치된 모양으로 판단된 모양 중 적어도 하나를 인공 표식으로 특정할 수 있다.
이와 같이, 학습 엔진을 청소기의 주행에 적용하는 경우, 제어부(1800)는 청소기의 주행에 방해되는 의자 다리, 선풍기, 특정 형태의 발코니 틈과 같은 장애물이 청소기 주변에 존재하는지 여부를 인식할 수 있으므로, 청소기 주행의 효율 및 신뢰도를 높일 수 있다.
한편, 위와 같은 학습 엔진은 제어부(1800)에 탑재될 수도 있고, 외부 서버에 탑재될 수도 있다. 학습 엔진이 외부 서버에 탑재된 경우, 제어부(1800)는 분석의 대상인 적어도 하나의 영상을 외부 서버로 전송하도록 통신부(1100)를 제어할 수 있다.
외부 서버는 청소기로부터 전송받은 영상을 학습 엔진에 입력함으로서, 해당 영상에 포함된 적어도 하나의 사물 또는 생명체를 인식할 수 있다. 아울러, 외부 서버는 인식결과와 관련된 정보를 다시 청소기로 전송할 수 있다. 이때, 인식결과와 관련된 정보는 분석의 대상인 영상에 포함된 객체의 개수, 각 개체의 이름과 관련된 정보를 포함할 수 있다.
한편, 주행부(1300)는 모터를 구비하여, 모터를 구동함으로써, 좌, 우측 주바퀴를 양 방향으로 회전시켜 본체를 회전 또는 이동시킬 수 있다. 이때, 좌, 우측 주바퀴는 독립적으로 움직일 수 있다. 주행부(1300)는 이동 로봇의 본체를 전후좌우로 진행시키거나, 곡선주행시키거나, 제자리 회전시킬 수 있다.
한편, 입력부(1200)는 사용자로부터 이동로봇에 대한 각종 제어 명령을 입력받는다. 입력부(1200)는 하나 이상의 버튼을 포함할 수 있고, 예를 들어, 입력부(1200)는 확인버튼, 설정버튼 등을 포함할 수 있다. 확인버튼은 감지 정보, 장애물 정보, 위치 정보, 맵 정보를 확인하는 명령을 사용자로부터 입력 받기 위한 버튼이고, 설정버튼은 정보들을 설정하는 명령을 사용자로부터 입력받기 위한 버튼이다.
또한, 입력부(1200)는 이전 사용자 입력을 취소하고 다시 사용자 입력을 받기 위한 입력재설정버튼, 기 설정된 사용자 입력을 삭제하기 위한 삭제버튼, 작동 모드를 설정하거나 변경하는 버튼, 충전대로 복귀하도록 하는 명령을 입력받는 버튼 등을 포함할 수 있다.
또한, 입력부(1200)는 하드 키나 소프트 키, 터치패드 등으로 이동로봇의 상부에 설치될 수 있다. 또, 입력부(1200)는 출력부(1500)와 함께 터치 스크린의 형태를 가질 수 있다.
한편, 출력부(1500)는, 이동 로봇의 상부에 설치될 수 있다. 물론 설치 위치나 설치 형태는 달라질 수 있다. 예를 들어, 출력부(1500)는 배터리 상태 또는 주행 방식 등을 화면에 표시할 수 있다.
또한, 출력부(1500)는, 센싱부(1400)가 검출한 이동 로봇 내부의 상태 정보, 예를 들어 이동 로봇에 포함된 각 구성들의 현재 상태를 출력할 수 있다. 또, 출력부(1500)는 센싱부(1400)가 검출한 외부의 상태 정보, 장애물 정보, 위치 정보, 지도 정보 등을 화면에 디스플레이할 수 있다.
출력부(1500)는 발광 다이오드(Light Emitting Diode; LED), 액정 표시 장치(Liquid Crystal Display; LCD), 플라즈마 표시 패널(Plasma Display Panel), 유기 발광 다이오드(Organic Light Emitting Diode; OLED) 중 어느 하나의 소자로 형성될 수 있다.
출력부(1500)는, 제어부(1800)에 의해 수행되는 이동 로봇의 동작 과정 또는 동작 결과를 청각적으로 출력하는 음향 출력 수단을 더 포함할 수 있다. 예를 들어, 출력부(1500)는 제어부(1800)에 의해 생성된 경고 신호에 따라 외부에 경고음을 출력할 수 있다.
이때, 음향 출력 수단(미도시)은 비퍼(beeper), 스피커 등의 음향을 출력하는 수단일 수 있고, 출력부(1500)는 메모리(1700)에 저장된 소정의 패턴을 가진 오디오 데이터 또는 메시지 데이터 등을 이용하여 음향 출력 수단을 통해 외부로 출력할 수 있다.
따라서, 본 발명의 일 실시예에 따른 이동 로봇은, 출력부(1500)를 통해 주행 영역에 대한 환경 정보를 화면에 출력하거나 음향으로 출력할 수 있다. 또 다른 실시예에 따라, 이동 로봇은 출력부(1500)를 통해 출력할 화면이나 음향을 단말 장치가 출력하도록, 지도 정보 또는 환경 정보를 통신부(1100)릍 통해 단말 장치에 전송할 수 있다.
메모리(1700)는 이동로봇을 제어 또는 구동하는 제어 프로그램 및 그에 따른 데이터를 저장한다. 메모리(1700)는 오디오 정보, 영상 정보, 장애물 정보, 위치 정보, 지도 정보 등을 저장할 수 있다. 또, 메모리(1700)는 주행 패턴과 관련된 정보를 저장할 수 있다.
메모리(1700)는 비휘발성 메모리를 주로 사용한다. 여기서, 비휘발성 메모리(Non-Volatile Memory, NVM, NVRAM)는 전원이 공급되지 않아도 저장된 정보를 계속 유지할 수 있는 저장 장치로서, 일 예로, 롬(ROM), 플래시 메모리(Flash Memory), 마그네틱 컴퓨터 기억 장치(예를 들어, 하드 디스크, 디스켓 드라이브, 마그네틱 테이프), 광디스크 드라이브, 마그네틱 RAM, PRAM 등일 수 있다.
한편, 센싱부(1400)는, 외부 신호 감지 센서, 전방 감지 센서, 낭떠러지 감지 센서, 2차원 카메라 센서, 액체 감지센서 및 3차원 카메라 센서 중 적어도 하나를 포함할 수 있다.
외부 신호 감지 센서는 이동 로봇의 외부 신호를 감지할 수 있다. 외부 신호 감지 센서는, 일 예로, 적외선 센서(Infrared Ray Sensor), 초음파 센서(Ultra Sonic Sensor), RF 센서(Radio Frequency Sensor) 등일 수 있다.
이동 로봇은 외부 신호 감지 센서를 이용하여 충전대가 발생하는 안내 신호를 수신하여 충전대의 위치 및 방향을 확인할 수 있다. 이때, 충전대는 이동 로봇이 복귀 가능하도록 방향 및 거리를 지시하는 안내 신호를 발신할 수 있다. 즉, 이동 로봇은 충전대로부터 발신되는 신호를 수신하여 현재의 위치를 판단하고 이동 방향을 설정하여 충전대로 복귀할 수 있다.
한편, 전방 감지 센서는, 이동 로봇의 전방, 구체적으로 이동 로봇의 측면 외주면을 따라 일정 간격으로 설치될 수 있다. 전방 감지 센서는 이동 로봇의 적어도 일 측면에 위치하여, 전방의 장애물을 감지하기 위한 것으로서, 전방 감지 센서는 이동 로봇의 이동 방향에 존재하는 물체, 특히 장애물을 감지하여 검출 정보를 제어부(1800)에 전달할 수 있다. 즉, 전방 감지 센서는, 이동 로봇의 이동 경로 상에 존재하는 돌출물, 집안의 집기, 가구, 벽면, 벽 모서리 등을 감지하여 그 정보를 제어부(1800)에 전달할 수 있다.
전방 감지 센서는, 일 예로, 적외선 센서, 초음파 센서, RF 센서, 지자기 센서 등일 수 있고, 이동 로봇은 전방 감지 센서로 한 가지 종류의 센서를 사용하거나 필요에 따라 두 가지 종류 이상의 센서를 함께 사용할 수 있다.
일 예로, 초음파 센서는 일반적으로 원거리의 장애물을 감지하는 데 에 주로 사용될 수 있다. 초음파 센서는 발신부와 수신부를 구비하여, 제어부(1800)는 발신부를 통해 방사된 초음파가 장애물 등에 의해 반사되어 수신부에 수신되는 지의 여부로 장애물의 존부를 판단하고, 초음파 방사 시간과 초음파 수신시간을 이용하여 장애물과의 거리를 산출할 수 있다.
또한, 제어부(1800)는 발신부에서 방사된 초음파와, 수신부에 수신되는 초음파를 비교하여, 장애물의 크기와 관련된 정보를 검출할 수 있다. 예를 들어, 제어부(1800)는 수신부에 더 많은 초음파가 수신될수록, 장애물의 크기가 큰 것으로 판단할 수 있다.
일 실시 예에서, 복수(일 예로, 5개)의 초음파 센서가 이동 로봇의 전방 측면에 외주면을 따라 설치될 수 있다. 이때, 바람직하게 초음파 센서는 발신부와 수신부가 교대로 이동 로봇의 전면에 설치될 수 있다.
즉, 발신부는 본체의 전면 중앙으로부터 좌, 우측에 이격되도록 배치될 수 있고, 수신부의 사이에 하나 또는 둘 이상의 발신부가 배치되어 장애물 등 으로부터 반사된 초음파 신호의 수신 영역을 형성할 수 있다. 이와 같은 배치로 센서의 수를 줄이면서 수신 영역을 확장할 수 있다. 초음파의 발신 각도는 크로스토크(crosstalk) 현상을 방지하도록 서로 다른 신호에 영향을 미치지 아니하는 범위의 각을 유지할 수 있다. 또한, 수신부들의 수신 감도는 서로 다르게 설정될 수 있다.
또한, 초음파 센서에서 발신되는 초음파가 상향으로 출력되도록 초음파 센서는 일정 각도만큼 상향으로 설치될 수 있고, 이때, 초음파가 하향으로 방사되는 것을 방지하기 위해 소정의 차단 부재를 더 포함할 수 있다.
한편, 전방 감지 센서는, 전술한 바와 같이, 두 가지 종류 이상의 센서를 함께 사용할 수 있고, 이에 따라, 전방 감지 센서는 적외선 센서, 초음파 센서, RF 센서 등 중 어느 한 가지 종류의 센서를 사용할 수 있다.
일 예로, 전방 감지 센서는 초음파 센서 이외에 다른 종류의 센서로 적외선 센서를 포함할 수 있다. 적외선 센서는 초음파 센서와 함께 이동 로봇의 외주면에 설치될 수 있다. 적외선 센서 역시, 전방이나 측면에 존재하는 장애물을 감지하여 장애물 정보를 제어부(1800)에 전달할 수 있다. 즉, 적외선 센서는, 이동 로봇의 이동 경로 상에 존재하는 돌출물, 집안의 집기, 가구, 벽면, 벽 모서리 등을 감지하여 그 정보를 제어부(1800)에 전달한다. 따라서, 이동 로봇은 본체가 장애물과의 충돌없이 특정 영역 내에서 이동할 수 있다.
한편, 낭떠러지 감지 센서(또는 클리프 센서(Cliff Sensor))는, 다양한 형태의 광 센서를 주로 이용하여, 이동 로봇의 본체를 지지하는 바닥의 장애물을 감지할 수 있다. 즉, 낭떠러지 감지 센서는, 바닥의 이동 로봇의 배면에 설치되되, 이동 로봇의 종류에 따라 다른 위치에 설치될 수 있음은 물론이다.
낭떠러지 감지 센서는 이동 로봇의 배면에 위치하여, 바닥의 장애물을 감지하기 위한 것으로서, 낭떠러지 감지 센서는 장애물 감지 센서와 같이 발광부와 수광부를 구비한 적외선 센서, 초음파 센서, RF 센서, PSD(Position Sensitive Detector) 센서 등 일수 있다.
일 예로, 낭떠러지 감지 센서 중 어느 하나는 이동 로봇의 전방에 설치되고, 다른 두 개의 낭떠러지 감지 센서는 상대적으로 뒤쪽에 설치될 수 있다. 예를 들어, 낭떠러지 감지 센서는 PSD 센서일 수 있으나, 복수의 서로 다른 종류의 센서로 구성될 수도 있다.
PSD 센서는 반도체 표면저항을 이용해서 1개의 p-n접합으로 입사광의 단장거리 위치를 검출한다. PSD 센서에는 일축 방향만의 광을 검출하는 1차원 PSD 센서와, 평면상의 광위치를 검출할 수 있는 2차원 PSD 센서가 있으며, 모두 pin 포토 다이오드 구조를 가질 수 있다. PSD 센서는 적외선 센서의 일종으로서, 적외선을 이용하여, 적외선을 송신한 후 장애물에서 반사되어 돌아오는 적외선의 각도를 측정하여 거리를 측정한다. 즉, PSD 센서는 삼각측량방식을 이용하여, 장애물과의 거리를 산출한다.
PSD 센서는 장애물에 적외선을 발광하는 발광부와, 장애물로부터 반사되어 돌아오는 적외선을 수광하는 수광부를 구비하되, 일반적으로 모듈 형태로 구성된다. PSD 센서를 이용하여, 장애물을 감지하는 경우, 장애물의 반사율, 색의 차이에 상관없이 안정적인 측정값을 얻을 수 있다.
청소부(1900)는 제어부(1800)로부터 전달되는 제어명령에 따라, 지정된 청소 영역을 청소한다. 청소부(1900)는 지정된 청소 영역의 먼지를 비산시키는 브러쉬(미도시)를 통해 주변의 먼지를 비산시킨 다음, 흡입 팬 및 흡입 모터를 구동하여 비산된 먼지를 흡입한다. 또한, 청소부(1900)는 구성의 교체에 따라 지정된 청소 영역에 걸레질을 수행할 수도 있다.
또한, 제어부(1800)는 낭떠러지 감지 센서가 지면을 향해 발광한 적외선의 발광신호와 장애물에 의해 반사되어 수신되는 반사신호 간의 적외선 각도를 측정하여, 낭떠러지를 감지하고 그 깊이를 분석할 수 있다.
한편, 제어부(1800)는 낭떠러지 감지 센서를 이용하여 감지한 낭떠 러지의 지면 상태에 따라 통과 여부를 판단할 수 있고, 판단 결과에 따라 낭떠러지의 통과 여부를 결정할 수 있다. 예를 들어, 제어부(1800)는 낭떠러지 감지 센서를 통해 낭떠러지의 존재 여부 및 낭떠러지 깊이를 판단한 다음, 낭떠러지 감지 센서를 통해 반사 신호를 감지한 경우에만 낭떠러지를 통과하도록 한다. 다른 예로, 제어부(1800)는 낭떠러지 감지 센서를 이용하여 이동 로봇의 들림 현상을 판단할 수도 있다.
한편, 2차원 카메라 센서는, 이동 로봇의 일면에 구비되어, 이동 중 본체 주변과 관련된 이미지 정보를 획득한다. 옵티컬 플로우 센서(Optical Flow Sensor)는, 센서 내에 구비된 이미지 센서로부터 입력되는 하방 영상을 변환하여 소정 형식의 영상 데이터를 생성한다. 생성된 영상 데이터는 메모리(1700)에 저장될 수 있다.
또한, 하나 이상의 광원이 옵티컬 플로우 센서에 인접하여 설치될 수 있다. 하나 이상의 광원은, 이미지 센서에 의해 촬영되는 바닥면의 소정 영역에 빛을 조사한다. 즉, 이동 로봇이 바닥면을 따라 특정 영역을 이동하는 경우에, 바닥면이 평탄하면 이미지 센서와 바닥면 사이에는 일정한 거리가 유지된다.
반면, 이동 로봇이 불균일한 표면의 바닥면을 이동하는 경우에는 바닥면의 요철 및 장애물에 의해 일정 거리 이상 멀어지게 된다. 이때 하나 이상의 광원은 조사되는 빛의 양을 조절하도록 제어부(1800)에 의해 제어될 수 있다. 광원은 광량 조절이 가능한 발광 소자, 예를 들어 LED(Light Emitting Diode) 등일 수 있다.
옵티컬 플로우 센서를 이용하여, 제어부(1800)는 이동 로봇의 미끄러짐과 무관하게 이동 로봇의 위치를 검출할 수 있다. 제어부(1800)는 옵티컬 플로우 센서에 의해 촬영된 영상 데이터를 시간에 따라 비교 분석하여 이동 거리 및 이동 방향을 산출하고, 이를 근거로 이동 로봇의 위치를 산출할 수 있다. 옵티컬 플로우 센서를 이용하여 이동 로봇의 하방에 대한 이미지 정보를 이용함으로써, 제어부(1800)는 다른 수단에 의해 산출한 이동 로봇의 위치에 대하여 미끄러짐에 강인한 보정을 할 수 있다.
3차원 카메라 센서는 이동 로봇의 본체 일면 또는 일부분에 부착되어, 본체의 주위와 관련된 3차원 좌표 정보를 생성할 수 있다. 즉, 3차원 카메라 센서는 이동 로봇과 피촬영 대상체의 원근거리를 산출하는 3차원 뎁스 카메라(3D Depth Camera)일 수 있다.
구체적으로, 3차원 카메라 센서는 본체의 주위와 관련된 2차원 영상을 촬영할 수 있으며, 촬영된 2차원 영상에 대응되는 복수의 3차원 좌표 정보를 생성할 수 있다.
일 실시예에서 3차원 카메라 센서는 기존의 2차원 영상을 획득하는 카메라를 2개 이상 구비하여, 2개 이상의 카메라에서 획득되는 2개 이상의 영상을 조합하여, 3차원 좌표 정보를 생성하는 스테레오 비전 방식으로 형성될 수 있다.
구체적으로, 실시예에 따른 3차원 카메라 센서는 본체의 전방을 향해 하측으로 제1 패턴의 광을 조사하는 제1 패턴 조사부와, 본체의 전방을 향해 상측으로 제2 패턴의 광을 조사하는 제2 패턴 조사부 및 본체의 전방의 영상을 획득하는 영상 획득부를 포함할 수 있다. 이로써, 영상 획득부는 제1 패턴의 광과 제2 패턴의 광이 입사된 영역의 영상을 획득할 수 있다.
또 다른 실시예에서 3차원 카메라 센서는 단일 카메라와 함께 적외선 패턴을 조사하는 적외선 패턴 방출부를 구비하고, 적외선 패턴 방출부에서 조사된 적외선 패턴이 피촬영 대상체에 투영된 모양을 캡쳐함으로써, 3차원 카메라 센서와 피촬영 대상체 사이의 거리를 측정할 수 있다. 이러한 3차원 카메라 센서는 IR(Infra Red) 방식의 3차원 카메라 센서일 수 있다.
또 다른 실시예에서 3차원 카메라 센서는 단일 카메라와 함께 빛을 방출하는 발광부를 구비하고, 발광부에서 방출되는 레이저 중 피촬영 대상체로부터 반사되는 일부를 수신하며, 수신된 레이저를 분석함으로써, 3차원 카메라 센서와 피촬영 대상체 사이의 거리를 측정할 수 있다. 이러한 3차원 카메라 센서는 TOF(Time of Flight) 방식의 3차원 카메라 센서일 수 있다.
구체적으로, 위와 같은 3차원 카메라 센서의 레이저는 적어도 일방향으로 연장된 형태의 레이저를 조사하도록 구성된다. 일 예에서, 3차원 카메라 센서는 제1 및 제2 레이저를 구비할 수 있으며, 제1 레이저는 서로 교차하는 직선 형태의 레이저를 조사하고, 제2 레이저는 단일의 직선 형태의 레이저를 조사할 수 있다. 이에 따르면, 최하단 레이저는 바닥 부분의 장애물을 감지하는 데에 이용되고, 최상단 레이저는 상부의 장애물을 감지하는 데에 이용되며, 최하단 레이저와 최상단 레이저 사이의 중간 레이저는 중간 부분의 장애물을 감지하는 데에 이용된다.
센싱부(1400)는 청소영역에 대해 인공 표식의 정보를 수집한다. 구체적으로, 2차원 또는 3차원 카메라 센서는 청소영역에 대해 인공 표식의 정보를 포함하는 이미지를 수집할 수 있다.
한편, 통신부(1100)는 단말 장치 및/또는 특정 영역 내 위치한 타기기(본 명세서에서는 "가전 기기"라는 용어와 혼용하기로 한다)와 유선, 무선, 위성 통신 방식들 중 하나의 통신 방식으로 연결되어 신호와 데이터를 송수신한다.
통신부(1100)는 특정 영역 내에 위치한 타 기기와 데이터를 송수신할 수 있다. 이때, 타 기기는 네트워크에 연결하여 데이터를 송수신할 수 있는 장치이면 어느 것이어도 무방하며, 일 예로, 공기 조화 장치, 난방 장치, 공기 정화 장치, 전등, TV, 자동차 등과 같은 장치일 수 있다. 또한, 타 기기는, 문, 창문, 수도 밸브, 가스 밸브 등을 제어하는 장치 등일 수 있다. 또한, 타 기기는, 온도, 습도, 기압, 가스 등을 감지하는 센서 등일 수 있다.
또한, 통신부(1100)는 특정 영역 또는 일정 범위 내에 위치한 다른 로봇 청소기(100)와 통신할 수 있다.
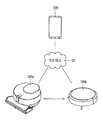
도 5a 및 도 5b를 참조하면, 자율주행을 수행하는 제1 이동로봇(100a)과 제2 이동로봇(100b)은 네트워크 통신(50)을 통해 서로 데이터를 주고 받을 수 있다. 또한, 자율주행을 수행하는 제1 이동로봇(100a) 및/또는 제2 이동로봇(100b)은 네트워크 통신(50) 또는 다른 통신을 통해 단말기(300)로부터 수신되는 제어명령에 의해 청소 관련 동작을 수행하거나 또는 대응되는 동작을 수행할 수 있다.
즉, 비록 도시되지는 않았지만, 자율주행을 수행하는 복수의 이동로봇(100a, 100b)가 제1 네트워크 통신을 통해서는 단말기(300)와 통신을 수행하고, 제2 네트워크 통신을 통해서는 상호간에 통신을 수행할 수 있다.
여기에서, 네트워크 통신(50)은 WLAN(Wireless LAN), WPAN(Wireless Personal Area Network), Wi-Fi(Wireless-Fidelity), Wi-Fi(Wireless Fidelity)Direct, DLNA(Digital Living Network Alliance), WiBro(Wireless Broadband), WiMAX(World Interoperability for Microwave Access), Zigbee, Z-wave, Blue-Tooth, RFID(Radio Frequency Identification), 적외선 통신(Infrared Data Association; IrDA), UWB(Ultrawide-Band), Wireless USB(Wireless Universal Serial Bus) 등과 같은 무선 통신 기술 중 적어도 하나를 이용한 근거리 통신을 의미할 수 있다.
도시된 네트워크 통신(50)은 서로 통신하고자 하는 이동로봇의 통신방식이 무엇인지에 따라 달라질 수 있다.
도 5a에서, 자율주행을 수행하는 제1 이동로봇(100a)의 및/또는 제2 이동로봇(100b)은 각각의 센싱 유닛을 통해 센싱된 정보를 네트워크 통신(50)을 통해 단말기(300)에 제공할 수 있다. 또한, 단말기(300)는 수신된 정보를 기초로 생성된 제어명령을 네트워크 통신(50)을 통해 제1 이동로봇(100a)의 및/또는 제2 이동로봇(100b)에 전달할 수 있다.
또한, 도 5a에서, 제1 이동로봇(100a)의 통신부와 제2 이동로봇(100b)의 통신부가 직접 무선 통신하거나 다른 공유기(미도시) 등을 매개로 간접 무선 통신하여, 주행 상태에 관한 정보 및 서로의 위치 정보 등을 파악할 수 있다.
일 예에서, 제2 이동로봇(100b)은 제1 이동로봇(100a)으로부터 수신되는 제어명령에 따라 주행 동작 및 청소 동작을 수행할 수 있다. 이러한 경우, 제1 이동로봇(100a)은 마스터로, 제2 이동로봇(100b)은 슬레이브로 동작한다고 말할 수 있다.
또는, 제2 이동로봇(100b)은 제1 이동로봇(100a)을 추종한다고 말할 수 있다. 또는, 경우에 따라서는 제1 이동로봇(100a)과 제2 이동로봇(100b)이 서로 협업한다고 말할 수도 있다.
이하 도 5b에서는 본 발명의 일 실시예에 따른 자율주행을 수행하는 복수의 이동로봇(100a, 100b)를 포함하는 시스템이 설명된다.
도 5b를 참조하면, 본 발명의 일 실시예에 따른 청소 시스템은, 자율 주행을 수행하는 복수의 이동로봇(100a, 100b), 네트워크 통신(50), 서버(500), 및 복수의 단말기(300a, 300b)을 포함할 수 있다.
이 중 복수의 이동로봇(100a, 100b)와, 네트워크 통신(50), 그리고 적어도 하나의 단말기(300a)는 건물(10) 내에 배치되고, 다른 단말기(300b)와 서버(500)는 건물(10) 외부에 위치할 수 있다.
복수의 이동로봇(100a, 100b)은, 스스로 주행하며 청소를 수행하는 청소기로서, 자율 주행 및 자율 청소를 수행할 수 있다. 복수의 이동로봇(100a, 100b)은, 주행 기능 및 청소 기능 외에, 내부에 각각 통신부(1100)를 구비할 수 있다.
또한, 복수의 이동로봇(100a, 100b), 서버(500), 및 복수의 단말기(300a, 300b)는 네트워크 통신(50)를 통해 서로 연결되어 서로 데이터를 교환할 수 있다. 이를 위해, 비록 도시되지는 않았지만, AP(access point; AP) 장치 등의 무선 공유기를 더 포함할 수 있다. 이러한 경우, 내부 네트워크 내에 위치한 단말기(300a)는, AP 장치를 통해 복수의 이동로봇(100a, 100b) 중 적어도 하나와 접속함으로써, 청소기에 대한 모니터링, 원격제어 등을 수행할 수 있다. 또한, 외부 네트워크에 위치한 단말기(300b)도, AP 장치를 통해 복수의 이동로봇(100a, 100b) 중 적어도 하나와 접속함으로써, 청소기에 대한 모니터링, 원격제어 등을 수행할 수 있게 된다.
서버(500)는 이동 단말기(300b)를 통해서 직접 무선 연결될 수 있다. 또는, 서버(500)는 이동 단말기(300b)를 통하지 않고 복수의 이동로봇(100a,100b) 중 적어도 하나와 연결될 수도 있다.
서버(500)는 프로그램 처리가능한 프로세서를 포함할 수 있으며, 각종 알고리즘을 구비할 수 있다. 예로서, 서버(500)는 머신 러닝(machine learning) 및/또는 데이터 마이닝(data mining)의 수행과 관련된 알고리즘을 구비할 수 있다.
또 예로써, 서버(500)는, 음성 인식 알고리즘을 구비할 수 있다. 이러한 경우, 음성 데이터 수신시, 수신되는 음성 데이터를, 텍스트 형식의 데이터로 변환하여, 출력할 수 있다.
서버(500)는, 복수의 이동로봇(100a, 100b)에 대한 펌웨어 정보, 운전정보(코스 정보 등)를 저장하고, 복수의 이동로봇(100a, 100b)에 대한 제품 정보를 등록할 수 있다. 예를 들어, 서버(500)는, 청소기 제조자가 운영하는 서버이거나 또는 공개된 애플리케이션 스토어 운영자가 운영하는 서버일 수 있다.
다른 예에서, 서버(500)는 내부 네트워크(10) 내에 구비되어, 홈 기기들에 대한 상태 정보를 저장하거나, 홈 기기에서 공유되는 컨텐츠를 저장하는 홈 서버일 수도 있다. 서버(500)가 홈 서버인 경우, 이물질과 관련된 정보, 예를 들어, 이물질 이미지 등을 저장할 수 있다.
한편, 복수의 이동로봇(100a, 100b)은 지그비(Zigbee), 지-웨이브(Zwave), 블루투스(Blue-Tooth), 초광대역 무선기술(Ultra-wide Band) 등을 통해 직접 무선 연결될 수 있다. 이러한 경우, 복수의 이동로봇(100a, 100b)은 서로의 위치정보 및 주행 정보를 교환할 수 있다.
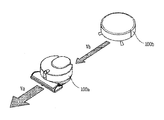
이때, 복수의 이동로봇(100a, 100b) 중 어느 하나는 마스터 이동로봇(100a)이 되고, 다른 하나는 슬레이브 이동로봇(100b)이 될 수 있다. 예로써, 제1 이동로봇(100a)은 청소 바닥의 먼지를 흡입하는 건식 청소기이고, 제2 이동로봇(100b)은 제1 이동로봇(100a)이 청소한 바닥을 걸레질하는 습식 청소기일 수 있다.
또한, 제1 이동로봇(100a)과 제2 이동로봇(100b)의 구조 및 사양은 서로 상이할 수 있다. 이러한 경우, 제1 이동로봇(100a)이 제2 이동로봇(100b)의 주행 및 청소를 제어할 수 있다. 또, 제2 이동로봇(100b)은 제1 이동로봇(100a)을 추종하며 주행 및 청소를 수행할 수 있다. 여기에서, 제2 이동로봇(100b)이 제1 이동로봇(100a)을 추종한다는 것은, 제2 이동로봇(100b)이 제1 이동로봇(100a)과 적절한 거리를 유지하면서 제1 이동로봇(100a)을 좇아서 주행 및 청소를 수행하는 것을 의미한다.
도 5c를 참조하면, 제1 이동로봇(100a)은 제2 이동로봇(100b)이 제1 이동로봇(100a)을 추종하도록 제2 이동로봇(100b)을 제어할 수 있다.
이를 위해, 제1 이동로봇(100a)과 제2 이동로봇(100b)은 상호 통신이 가능한 특정 영역 내에 존재하며, 제2 이동로봇(100b)은 적어도 제1 이동로봇(100a)의 상대위치를 파악하고 있어야 한다.
예로써, 제1 이동로봇(100a)의 통신부와 제2 이동로봇(100b)의 통신부가 상호 IR 신호, 초음파 신호, 반송파 주파수, 임펄스 신호 등을 교환하고, 삼각측량 등을 통해 이를 분석하여 제1 이동로봇(100a)과 제2 이동로봇(100b)의 이동변위를 산출함으로써 제1 이동로봇(100a)과 제2 이동로봇(100b)의 상대 위치를 파악할 수 있을 것이다.
그러나, 이러한 신호 교환을 통한 위치 파악은 제1 이동로봇(100a)과 제2 이동로봇(100b)이 각각 위치 센서를 탑재하거나 또는 서로 충분히 거리가 가까울 것을 전제로 한다. 이에, 본 발명에서는 추가적인 위치 센서를 구비하지 않고도 그리고 제1 이동로봇(100a)과 제2 이동로봇(100b) 간의 거리와 관계없이 지정된 공간 내에서 서로의 상대 위치를 쉽게 파악할 수 방법을 제시한다.
이와 같이 제1 이동로봇(100a)은 제2 이동로봇(100b) 간의 상대 위치가 인식되면, 제2 이동로봇(100b)은 제1 이동로봇(100a)에 저장된 맵 정보 또는 서버나 단말기 등에 저장된 맵 정보를 기준으로 제어될 수 있다. 또한, 제2 이동로봇(100b)은 제1 이동로봇(100a)에서 센싱된 장애물 정보를 공유할 수 있다. 또한, 제2 이동로봇(100b)은 제1 이동로봇(100a)에서 수신되는 제어명령(예, 주행방향, 주행속도, 정지 등의 주행과 관련된 제어명령)에 의해 동작을 수행할 수 있다.
구체적으로, 제2 이동로봇(100b)은 제1 이동로봇(100a)의 주행 경로를 따라 주행하면서 청소를 수행한다. 다만, 제1 이동로봇(100a)과 제2 이동로봇(100b)의 진행방향이 항상 일치하지는 않는다. 예를 들어, 제1 이동로봇(100a)이 상/하/좌/우로 이동하거나 회전하는 경우, 제2 이동로봇(100b)은 소정 시간 후에 상/하/좌/우로 이동하거나 회전하므로, 현재 진행방향이 서로 달라질 수 있다.
또한, 제1 이동로봇(100a)의 주행 속도(Va)와 제2 이동로봇(100b)의 주행속도(Vb)는 서로 다를 수 있다. 제1 이동로봇(100a)은 제1 이동로봇(100a)과 제2 이동로봇(100b)의 통신가능한 거리를 고려하여, 제1 이동로봇(100a) 및/또는 제2 이동로봇(100b)의 주행 속도(Vb)를 가변하도록 제어할 수 있다.
예로써, 제1 이동로봇(100a)과 제2 이동로봇(100b)이 일정거리 이상으로 멀어지면, 제1 이동로봇(100a)은 제2 이동로봇(100b)의 주행 속도(Vb)가 이전보다 빨라지도록 제어할 수 있다. 또, 제1 이동로봇(100a)과 제2 이동로봇(100b)이 일정 거리 이상으로 가까워지면 제2 이동로봇(100b)의 주행 속도(Vb)가 이전보다 느리도록 제어하거나 또는 소정 시간 정지하도록 제어할 수 있다. 이를 통해, 제2 이동로봇(100b)이 제1 이동로봇(100a)을 계속 추종하며 청소를 수행할 수 있다.
또한, 비록 도시되지는 않았지만, 제1 이동로봇(100a)과 제2 이동로봇(100b)은 지정된 공간을 나누어 협업하며 청소하도록 동작할 수 있다. 이를 위해, 제1 이동로봇(100a)과 제2 이동로봇(100b)은 지정된 공간을 청소했던 이력이 적어도 한번 은 있으며 자신의 위치 좌표가 표시된 장애물 지도를 각각 보유할 수 있다.
장애물 지도는, 특정 공간의 영역 관련 정보(예, 영역의 형상, 벽의 위치, 바닥의 높낮이, 문/문턱의 위치 등), 청소기의 위치 정보, 충전 스테이션의 위치 정보, 그리고 특정 공간 내에 존재하는 장애물에 관한 정보(예, 장애물의 위치, 크기 등)를 포함할 수 있다. 여기서, 장애물은 청소영역의 바닥으로부터 돌출 되어 청소기의 주행을 방해하는 벽(wall), 가구, 집기 등의 고정 장애물과 움직이는 이동 장애물뿐만 아니라, 낭떠러지(cliff)도 포함할 수 있다.
제1 이동로봇(100a)이 보유한 장애물 지도와 제2 이동로봇(100b)이 보유한 장애물 지도는 서로 다를 수 있다. 예를 들어, 제1 이동로봇(100a)과 제2 이동로봇(100b)이 이종이거나 또는 탑재된 장애물 센서(예, 초음파 센서, 레이저 센서, 전파 센서, 적외선 센서, 범퍼 등)가 서로 다른 경우, 동일한 공간에 대해 작성된 것이라도 서로 다른 장애물 지도가 생성될 수 있다.
또한, 제1 이동로봇(100a)과 제2 이동로봇(100b)의 각 메모리(1700)에는 적어도 협업 청소를 하기 전에 지정된 공간에 대해 미리 작성된 장애물 지도 및 이와 관련된 맵 데이터가 저장될 수 있다.
여기에서, 각 장애물 지도는 지정된 공간에 대한 2D 또는 3D 영상 또는 그리드 맵 형태로 구현될 수 있다. 또한, 각 장애물 지도는 적어도 하나의 장애물 정보, 예를 들어 테이블, 벽면, 문턱 등의 위치 정보 및 크기 정보와 함께, 자신(즉, 제1 이동로봇(100a) 또는 제2 이동로봇(100b))의 위치 정보 및 청소 영역 내에 액체 영역(A1)의 위치정보를 포함할 수 있다.
또한, 각 장애물 지도는 지정된 실제 공간의 형상과 동일하며, 평면도 실측값을 기초로 실제 공간과 동일한 스케일로 생성될 수 있다.
한편, 제1 이동로봇(100a)과 제2 이동로봇(100b)은 지정된 공간 내에서 각각 독립적으로 주행 및 청소를 수행할 수 있다. 그러나, 협업이 아닌 별개의 시나리오로 청소를 수행할 경우, 제1 이동로봇(100a)의 주행 궤적과 제2 이동로봇(100b)의 주행 궤적이 중첩되는 등, 복수의 이동로봇을 사용하여 효율적으로 청소를 수행하려는 목적에 반할 수 있다.
이에, 본 발명에서는 복수의 이동로봇이 협업/추종 청소 동작을 수행하기 위해, 위치 센서 없이도 지정된 공간 내에서 서로의 상대 위치를 인식할 수 있다.
구체적으로, 본 발명에서는 제1 이동로봇(100a)이 제2 이동로봇(100b)과 통신하여, 제2 이동로봇(100b)으로부터 제2 이동로봇(100b)의 위치 및 인공표식이 표시된 장애물 지도를 수신한다. 그리고, 수신된 장애물 지도를 제1 이동로봇(100a)의 장애물 지도의 인공표식을 기준으로 캘리브레이션하여 좌표계를 통일한다. 그리고, 좌표계가 통일된 제2 이동로봇(100b)의 장애물 지도를 사용하여 제1 이동로봇(100a)이 제2 이동로봇(100b)의 상대 위치를 인식할 수 있다. 즉, 본 발명에서는 제1 이동로봇(100a)과 제2 이동로봇(100b)이 동일 공간에 대하여 각각 장애물 지도를 갖고 있기만 하면, 서로 다른 장애물 센서의 사용으로 인해 지도의 좌표계가 다르거나 서로 근거리 무선신호를 주고받을 정도로 가까이 있지 않거나 위치 센서를 탑재하지 않더라도, 동일 공간 내에서 서로의 상대 위치를 인식할 수 있다.
이하, 도 6을 참고하여, 본 발명의 실시예들에 따른 복수의 로봇 청소기의 제어방법 및 제어 시스템을 설명하면 다음과 같다. 제어방법은, 실시예에 따라 제어부(1800)에 의해서만 수행될 수도 있고, 제어부(1800)와 단말기(300) 또는 서버(500)에 의해 수행될 수도 있다. 본 발명은, 제어방법의 각 단계를 구현하는 컴퓨터 프로그램이 될 수도 있고, 제어방법을 구현하기 위한 프로그램이 기록된 기록매체가 될 수도 있다. ‘기록매체’는 컴퓨터로 판독 가능한 기록매체를 의미한다. 본 발명은, 하드웨어와 소프트웨어를 모두 포함하는 시스템이 될 수도 있다.
몇 가지 실시예들에서는 단계들에서 언급된 기능들이 순서를 벗어나서 발생하는 것도 가능하다. 예컨대, 잇달아 도시되어 있는 두 개의 단계들은 사실 실질적으로 동시에 수행되는 것도 가능하고 또는 그 단계들이 때때로 해당하는 기능에 따라 역순으로 수행되는 것도 가능하다.
먼저, 복수의 이동 로봇이 협업 청소를 수행하기 위해 복수의 청소기를 하나의 그룹으로 선택하고, 함께 청소할 영역을 지정할 수 있다.
구체적으로 도 6을 참고하면, 복수의 이동 로봇의 제어방법은 복수의 로봇 청소기를 등록시키는 단계(S10)를 포함한다. 제어방법은, 단계(S10) 후, 사용자에 의해 협업 청소 모드가 선택 입력되는 단계(S20)를 포함한다. 제어방법은, 협업 청소가 선택 입력된 후, 협업할 복수의 로봇 청소기(복수의 협업 로봇 청소기라 칭할 수 있음)가 선택되고 복수의 협업 모드 중 어느 하나가 선택되는 단계(S30)를 포함한다. 제어방법은, 복수의 로봇 청소기가 청소를 수행하는 단계(S90)를 포함한다.
로봇 청소기 등록 단계(S10)에서, 복수의 로봇 청소기(100a, 100b)는 단말기(300)에 등록될 수 있다. 복수의 로봇 청소기(100a, 100b)는 서버(500)에 등록될 수도 있다.
사용자는 단말기(300)의 화면에서 제품 등록 입력부를 터치하여, 네트워크 상 연결 가능한 로봇 청소기를 등록시킬 수 있다. 제품 등록을 마치면, 단말기(300)의 화면에 등록 완료된 로봇 청소기가 표시될 수 있다.
협업 청소 선택 단계(S20)에서, 사용자는 단말기(300)를 통해 협업 청소 모드를 선택할 수 있다. 위 단계(S30)는, 등록 완료된 복수의 로봇 청소기 중 협업 청소를 수행할 복수의 협업 로봇 청소기를 선택하는 로봇 청소기 선택 단계(S30)를 포함한다.
예를 들어, 사용자는 선택항를 선택하여, 로봇 청소기1이 제 1로봇 청소기(100a)가 되도록 입력할 수 있다. 또한, 위의 단계(S30)에서, 사용자는 단말기(300)의 화면에서 적어도 하나 이상의 선택항 중 제 2로봇 청소기(100b)를 선택할 수 있다. 예를 들어, 사용자는 선택항를 선택하여, 로봇 청소기2(물걸레)가 제 2로봇 청소기(100b)가 되도록 입력할 수 있다. 후술할 제 2실시예에서는, 사용자가 복수의 협업 로봇 청소기 중 주 로봇 청소기만을 선택하여 입력할 수 있다.
위의 단계(S30)는, 복수의 협업 모드 중 어느 하나가 선택되는 모드 선택 단계(S30)를 포함한다. 사용자는 복수의 선택항) 중 선택하고자 하는 협업 모드에 대응하는 어느 하나를 선택할 수 있다.
청소 단계(S90)에서, 로봇 청소기 선택 단계(S30)에서 선택된 복수의 협업 로봇 청소기(100a, 100b)가 청소를 수행한다. 청소 단계(S90)에서, 모드 선택 단계(S30)에서 선택된 협업 모드에 따라 복수의 로봇 청소기(100a, 100b)가 청소를 수행한다.
위의 로봇 청소기 선택 단계(S30)에서, 등록된 복수의 로봇 청소기 중 제 1로봇 청소기(100a) 및 제 2로봇 청소기(100b)가 선택된다. 제 1로봇 청소기(100a) 및 제 2로봇 청소기(100b)는 협업 청소를 수행하도록 선택된 청소기를 의미한다. 단계(S30) 후, 단말기(300)가 네트워크를 통해 제 1로봇 청소기(100a) 및 제 2로봇 청소기(100b)에 지시를 주면, 제 1로봇 청소기(100a) 및 제 2로봇 청소기(100b)는 각각 현재 상태를 분석하여 맵 상의 자신의 위치를 확인한다(S150a, S150b). 제 1로봇 청소기(100a)는, 자신의 위치 확인(S150a) 후, 제 2로봇 청소기(100b)와 협업 청소를 수행한다(S90a). 제 2로봇 청소기(100b)는, 자신의 위치 확인(S150b) 후, 제 1로봇 청소기(100a)와 협업 청소를 수행한다(S90b). 제 1로봇 청소기(100a) 및 제 2로봇 청소기(100b)는, 청소를 수행(S90a, S90b)하는 중, 서로 정보를 송수신한다(S80).
이하, 상술한 협업 청소 중 청소 영역 내에 액체가 감지되는 경우에 대해 설명하도록 한다.
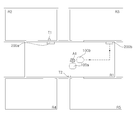
도 7 및 도 8을 참조하면, 본 발명의 제1 실시예에 따른 복수의 로봇 청소기의 제어방법은 제1 이동로봇(100a)이 청소 영역 내에 존재하는 액체를 감지하는 단계(S110), 제1 이동로봇(100a)이 액체를 감지하면, 제2 이동로봇(100b)으로 액체 영역(A1) 위치정보를 포함하는 장애물 지도와 액체 영역(A1) 청소명령을 송신하는 단계(S113), 제2 이동로봇(100b)이 액체 영역(A1) 청소명령을 수신하면, 제2 이동로봇(100b)이 액체 영역(A1)으로 이동하는 단계(S115, S120) 및 제2 이동로봇(100b)이 액체 영역(A1)을 청소하는 단계(S130)를 포함한다.
도 7a, 도 7b 및 도 8을 참조하면, 제1 이동로봇(100a)이 청소 영역 내에 존재하는 액체를 감지하는 단계 (S110)에서, 제1 이동로봇(100a)은 청소와 청소 영역 내에 액체 감지를 동시에 수행할 수 있다. 제1 이동로봇(100a)의 제어부(1800)는 주행부와 청소부를 제어하여서, 청소 구역의 장애물 지도를 작성하고 액체를 감지한다.
위의 단계(S110)에서, 구체적으로, 구체적으로, 제1 이동로봇(100a)은 초기 주행시와 같이 저장된 맵이 없는 경우, 청소 영역을 주행하여 벽추종(월팔로윙, Wall Following) 및/또는 센싱부(130)의 감지 정보 등을 통해 맵을 생성할 수 있다.
제1 이동로봇(100a)은 생성된 맵을 복수의 영역(R1, R2, R3, R4, R5, A1)으로 구분할 수 있다. 청소 영역은 소정 알고리즘에 따라 복수의 영역(R1, R2, R3, R4, R5, A1)로 구분될 수 있다.
일 예로, 로봇 청소기(100)가 기설정된 거리를 주행할 때마다 지나온 이동 궤적이 그룹화되어 어느 한 영역으로 구분될 수 있다.
다른 예로, 청소 영역의 구획 형상을 근거로 복수의 영역이 구분될 수 있다. 구체적으로, 로봇 청소기(100)는 청소 영역 내 각 실의 벽이나 개폐 가능한 문 등을 인식하여, 복수의 구역을 구분할 수 있다.
또 다른 예로, 구분된 영역의 넓이를 기준으로 청소 영역이 복수의 영역으로 구분될 수 있다. 구체적으로, 청소 영역을 각각 소정 기준에 따른 넓이를 가진 복수의 영역으로 구분하고, 복수의 영역 중에 액체가 존재하는 영역을 액체 영역(A1)으로 구분할 수 있다.
제1 이동로봇(100a)이 액체를 감지하는 방법은 카메라를 이용한 이미지 분석 방법 또는 액체 감지 센서(1411)를 이용한 방법이 사용될 수 있다.
액체 영역(A1) 청소명령을 송신하는 단계(S113)에서, 제1 이동로봇(100a)은 액체 영역(A1)의 위치정보를 수집하여 제2 이동로봇(100b)에 전송한다. 액체 영역(A1)의 위치정보는 장애물 지도에서 액체 영역(A1)의 좌표 값, 액체 영역(A1) 주변의 이미지, 액체 영역(A1)에서 적어도 하나의 라우터(T1, T2)와 제1 이동로봇(100a) 사이의 수신신호 강도 값을 포함할 수 있다.
바람직하게는 액체 영역(A1)의 위치정보는 장애물 지도에서 액체 영역(A1)의 좌표 값과 액체 영역(A1) 주변의 이미지 및 액체 영역(A1)에서 적어도 하나의 라우터(T1, T2)와 제1 이동로봇(100a) 사이의 수신신호 강도 값 중 적어도 하나의 조합일 수 있다. 이는 장애물 지도에서 액체 영역(A1)의 좌표 값 만으로는 정확한 액체 영역(A1)의 위치를 특정하기 어렵기 때문이다.
액체 영역(A1)으로 이동하는 단계(S115, S120)에서, 제2 이동로봇(100b)은 제1 이동로봇(100a)으로부터 액체 영역(A1) 청소명령과, 장애물 지도를 수신하면, 액체 영역(A1)으로 이동한다.
도 7c 및 도 8을 참조하면, 제2 이동로봇(100b)이 정확하게 액체 영역(A1)으로 이동하기 위해, 제2 이동로봇(100b)이 장애물 지도에서 액체 영역(A1)의 좌표 값, 액체 영역(A1) 주변의 이미지, 제1 이동로봇(100a)과 제2 이동로봇(100b) 사이의 수신신호 강도 값 및 라우터(T1, T2)와 각 이동 로봇들 사이의 수신신호 강도 값 중 적어도 하나를 바탕으로 액체 영역(A1)을 특정할 수 있다.
제어부(1800)는 장애물 지도에서 액체 영역(A1)의 좌표 값을 바탕으로 액체 영역(A1)을 특정할 수 있다. 제어부(1800)는 센싱부에서 입력된 본체 주변의 영상을 바탕으로 액체 영역(A1)을 특정할 수 있다. 제어부(1800)는 장애물 지도에서 액체 영역(A1)의 좌표와 통신부와 제1 이동로봇(100a) 사이의 수신신호 강도(RSSI)를 바탕으로 액체 영역(A1)을 특정할 수 있다. 제어부(1800)는 장애물 지도에서 액체 영역(A1)의 좌표와 라우터(T1, T2)와 제2 이동로봇(100b) 사이의 수신신호 강도(RSSI) 값을 바탕으로 액체 영역(A1)을 특정할 수 있다. 제어부(1800)는 장애물 지도에서 액체 영역(A1)의 좌표와 라우터(T1, T2)와 액체 감지센서에서 감지된 감지 값을 바탕으로 액체 영역(A1)을 특정할 수 있다.
제2 이동로봇(100b)이 액체 영역(A1)을 특정하는 방법의 일예로, 제2 이동로봇(100b)은 수신된 장애물 지도에서 액체 영역(A1)의 좌표 값과 자신의 센싱부의 센싱 값을 바탕으로 액체 영역(A1)을 특정할 수 있다.
제2 이동로봇(100b)이 액체 영역(A1)을 특정하는 방법의 다른 예로, 제2 이동로봇(100b)은 수신된 장애물 지도에서 액체 영역(A1)의 좌표 값과 액체 영역(A1) 주변의 이미지 및 자신의 센싱부의 센싱 값을 바탕으로 액체 영역(A1)을 특정할 수 있다. 구체적으로, 제2 이동로봇(100b)은 액체 영역(A1)의 좌표 값을 기준으로 이동한 후 액체 영역(A1)의 주변에서 수신된 액체 영역(A1) 주변의 이미지와 일치하는 위치를 탐지한다. 즉, 제2 이동로봇(100b)은 센서부를 이용하여 천장을 포함하는 자신의 주변의 이미지를 수집하면서, 수신된 액체 영역(A1) 주변의 이미지와 자신의 주변의 이미지의 일치 여부를 판단하고, 일치되면, 그 위치를 액체 영역(A1)으로 특정할 수 있다. 여기서, 액체 영역(A1) 주변의 이미지는 인공 표식이 포함될 수 있다.
제2 이동로봇(100b)이 액체 영역(A1)을 특정하는 방법의 또 다른 예로, 제2 이동로봇(100b)은 수신된 장애물 지도에서 액체 영역(A1)의 좌표 값과 적어도 하나의 라우터(T1, T2)와 각 이동 로봇 사이의 수신신호 강도 값 및 자신의 센싱부의 센싱 값을 바탕으로 액체 영역(A1)을 특정할 수 있다.
구체적으로, 제2 이동로봇(100b)은 액체 영역(A1)의 좌표 값을 기준으로 이동한 후 액체 영역(A1)의 주변을 이동하면서, 자신과 라우터(T1, T2) 사이의 수신신호 강도 값을 측정하고, 측정된 자신의 수신신호 강도 값과 라우터(T1, T2)와 제1 이동로봇(100a) 사이의 수신신호 강도 값을 비교하고, 자신의 수신신호 강도 값과 제1 이동로봇(100a)의 수신신호 강도 값이 일치 또는 비슷한 경우, 그 위치를 액체 영역(A1)으로 특정할 수 있다.
근거리 또는 중거리 무선통신에 의해 복수의 이동 로봇들은 라우터(T1, T2)와 연결되게 된다. 각 라우터(T1, T2)와 각 이동 로봇들 사이의 거리에 의해 수신신호 강도 값이 차이가 존재하므로, 이러란 수신신호 강도 값을 바탕으로 정확한 위치를 특정할 수 있다.
제2 이동로봇(100b)이 액체 영역(A1)을 특정하는 방법의 또 다른 예로, 제1 이동로봇(100a)은 제2 이동로봇(100b)이 액체 영역(A1)으로 이동을 완료할 때 까지, 액체 영역(A1)의 주변에서 대기할 수 있다(S117). 구체적으로, 제1 이동로봇(100a)은 수집된 영상 또는 제1 이동로봇(100a)과 제2 이동로봇(100b) 사이의 수신신호 감도 값을 바탕으로 제2 이동로봇(100b)의 근접을 감지할 수 있다. 제2 이동로봇(100b)은 수신된 장애물 지도에서 액체 영역(A1)의 좌표 값과 제1 이동로봇(100a)과 제2 이동로봇(100b) 사이의 수신신호 강도 값을 바탕으로 액체 영역(A1)을 특정할 수 있다.
구체적으로, 제2 이동로봇(100b)은 액체 영역(A1)의 좌표 값을 기준으로 이동한 후 액체 영역(A1)의 주변을 이동하면서, 자신과 제1 이동로봇(100a) 사이의 수신신호 강도 값을 측정하고, 측정된 수신신호 강도 값과 기설정된 수신신호 강도 값을 비교하고, 측정된 수신신호 강도 값이 기설정된 강도 값을 초과하는 경우 그 위치를 액체 영역(A1)으로 특정할 수 있다.
또 다른 예로, 제2 이동로봇(100b)의 본체 전방 하단에 액체 감지 센서(1411)가 설치되고, 제2 이동로봇(100b)은 수신된 장애물 지도에서 액체 영역(A1)의 좌표 값과 자식의 액체 감지 센서(1411)의 센싱 값을 바탕으로 액체 영역(A1)을 특정할 수 있다. 구체적으로, 제2 이동로봇(100b)은 좌표 값을 기준으로 액체 영역(A1)으로 이동하고, 액체 영역(A1)을 주행하면서, 액체가 감지되는 경우, 그 위치를 액체 영역(A1)으로 특정할 수 있다.
제2 이동로봇(100b)이 액체 영역(A1)을 청소하는 단계(S130)를 포함한다.
제2 이동로봇(100b)이 액체 영역(A1)을 청소한다는 것은, 제2 이동로봇(100b)의 제어부(1800)가 제2 이동로봇(100b)의 주행부를 제어하여서, 제2 이동로봇(100b)의 본체가 액체 영역(A1)을 적어도 1회 바람직하게는 2회 이상 주행하거나, 액체 영역(A1)을 주행하는 것 일 수 있다. 제2 이동로봇(100b)이 액체 영역(A1)을 주행하면, 제2 이동로봇(100b)의 하면에 설치된 걸레부에 의해 액체가 제거된다.
물론, 다른 예로, 제2 이동로봇(100b)이 액체 영역(A1)을 청소한다는 것은, 제2 이동로봇(100b)의 제어부(1800)가 제2 이동로봇(100b)의 주행부를 제어하여서, 제2 이동로봇(100b)의 본체가 액체 영역(A1)을 적어도 1회 바람직하게는 2회 이상 주행하면서, 청소부를 구동하여서, 스핀맙 같은 걸레를 회전시키는 것 일 수 있다.
제2 이동로봇(100b)은 액체 영역(A1)의 청소가 완료된 후, 액체 영역(A1)의 청소가 완료된 것을 제1 이동로봇(100a)에 알려줄 수 있다(S135). 제2 이동로봇(100b)의 제어부(1800)는 통신부를 제어하여서, 제1 이동로봇(100a)으로 액체 영역(A1)의 청소 완료에 대핸 신호를 제1 이동로봇(100a)으로 송신할 수 있다.
제1 이동로봇(100a)은 제2 이동로봇(100b)이 액체 영역(A1)의 청소를 완료한 후에 액체 영역(A1)에 액체가 존재하는 지 판단할 수 있다(S140). 구체적으로, 제1 이동로봇(100a)은 제2 이동로봇(100b)으로부터 액체 영역(A1)의 청소를 완료했다는 신호를 수신하면, 액체 감지 센서(1411)를 제어하여서, 액체 영역(A1) 내에 액체가 존재하는 지 판단할 수 있다.
따라서, 제1 이동로봇(100a)만 액체를 감지하므로, 제1 이동로봇(100a)에만 액체 감지 센서(1411)를 설치하고 제2 이동로봇(100b)에 액체 감지 센서(1411)를 생략할 수 있어서, 제조비용을 줄일 수 있다.
제1 이동로봇(100a)은 제2 이동로봇(100b)이 액체 영역(A1)의 청소를 완료한 후에 액체 영역(A1)에 액체가 존재한다고 판단하는 경우, 제2 이동로봇(100b)에 액체 영역(A1)의 재청소를 명령하는 신호를 송신할 수 있다(S145).
제2 이동로봇(100b)은 제1 이동로봇(100a)으로부터 액체 영역(A1)의 재청소 명령을 수시하면, 액체 영역(A1)을 다시 청소할 수 있다(S160).
제1 이동로봇(100a)은 제2 이동로봇(100b)이 액체 영역(A1)의 청소를 완료한 후에 액체 영역(A1)에 액체가 존재하지 않는다고 판단하는 경우, 청소 영역에 대한 청소를 수행할 수 있다(S163). 구체적으로, 제1 이동로봇(100a)은 액체 영역(A1)에 액체가 존재하지 않는다고 판단하는 경우, 청소 영역 중에 액체 영역(A1)을 제외한 영역 또는 액체 영역(A1)을 포함하는 청소 영역의 청소를 수행할 수 있다. 이 때, 제1 이동로봇(100a)은 액체 영역(A1)을 발견하기 전의 주행 경로를 따라 다시 주행할 수 있다. 제1 이동로봇(100a)이 청소를 한다는 것은, 제1 이동로봇(100a)이 주행을 하면서 청소부를 제어하여서, 압력에 의해 이물질을 흡입하거나, 이물질을 쓸어서 흡입하는 것이다.
제2 이동로봇(100b)은 액체 영역(A1)에 대한 청소를 완료한 후, 제1 이동로봇(100a)을 따라가며 청소할 수 있다(S165). 구체적으로, 제2 이동로봇(100b)은 제1 이동로봇(100a)의 청소 영역의 계속 청소 신호를 수신하거나, 제1 이동로봇(100a)이 액체 영역(A1)의 주변을 벗어나는 경우, 제1 이동로봇(100a)을 추종하며 협업 청소를 수행할 수 있다.
이와 같은 추종/협업을 위해, 예를 들어, 인식된 상대 위치를 기초로, 다익스트라(Dijkstra) 알고리즘, A* (A-star) 알고리즘 등의 최단 경로 알고리즘을 적용하여 제1 이동로봇(100a)과 제2 이동로봇(100b)의 주행경로 또는 주행시간의 합이 최단이 되도록 협업 시나리오를 생성할 수 있다. 또는, 복수의 분할된 영역들에 대한 청소 우선순위와 제1 이동로봇(100a) 및 제2 이동로봇(100b)의 남은 배터리양을 기초로 청소 구역을 나누어 할당하는 협업 시나리오를 생성할 수도 있을 것이다.
한편, 이상에서는 두 대의 청소기를 사용하여 협업 청소하는 것을 예시로 설명하였으나, 이에 한정되지 않으며 세대 이상의 청소기가 협업하여 서로 의 위치를 인식하면서 청소를 수행하는 경우에도 본 발명의 실시 예들이 적용될 수 있을 것이다.
이상에서 살펴본 바와 같이, 본 발명의 실시 예에 따른 복수의 자율주행 청소기에 의하면, 복수의 이동로봇이 위치 센서를 탑재하지 않고도 지정된 공간 내의 다른 청소기의 위치를 인식하여 효율적인 협업 청소를 수행할 수 있다.
또한, 복수의 이동로봇의 종류가 달라서 동일한 공간에 대해 서로 다른 청소 맵을 사용하는 경우라도 특징 맵(SLAM)을 추가로 공유하지 않고 서로의 상대 위치를 쉽게 파악할 수 있다. 그에 따라, 협업 청소를 수행하는 중에도 복수의 이동로봇의 상대 위치에 따라 협업 시나리오를 효율적으로 수정하거나 업데이트할 수 있다.
도 9는 본 발명의 제2 실시예에 따른 복수의 로봇 청소기의 제어방법의 순서도이다.
제2 실시예에 따른 로봇 청소기의 제어방법은 제1 실시예와 비교하면, 제1 이동로봇(100a)이 제2 이동로봇(100b)에 액체 영역(A1)의 청소 명령을 전송하고, 바로 액체 영역(A1)을 제외한 청소영역을 청소하고, 제2 이동로봇(100b)이 액체 영역(A1)의 청소와, 액체 영역(A1)의 액체의 잔존 여부를 판단하고 정 위치로 복귀하는 차이점이 존재한다.
이하, 제1 실시예와 동일한 단계에 대해서는 설명을 생락하고 차이점 위주로 설명하고, 제1 실시예와 동일한 단계에 대해서는 동일한 도면 부호를 사용하였다.
제1 이동로봇(100a)은 제2 이동로봇(100b)으로 액체 영역(A1) 청소명령을 송신 한 후, 액체 영역(A1)을 제외한 청소 영역에 대한 청소를 수행할 수 있다 (S169). 제1 이동로봇(100a)은 청소 영역에 대한 청소를 완료한 후 정 위치로 복귀할 수 있다.
제2 이동로봇(100b)은 액체 영역(A1)을 청소를 완료 후에, 액체 감지센서를 통해 액체 영역(A1)에 액체가 잔존하는 지 판단할 수 있다(S136). 제2 이동로봇(100b)은 액체 영역(A1)에 액체가 잔존하면, 액체 영역(A1)에 대해 재 청소를 수행할 수 있다(S160).
제2 이동로봇(100b)은 액체 영역(A1)에 대한 청소를 완료한 후, 정 위치로 복귀할 수 있다(S167). 구체적으로, 제2 이동로봇(100b)의 제어부(1800)는 액체 영역(A1)에 액체가 잔존하지 않는 다고 판단하거나, 액체 영역(A1)의 재청소를 완료하면, 주행부를 제어하여서 제2 이동로봇(100b)이 정 위치로 복귀하게 할 수 있다.
제2 이동로봇(100b)에 액체 감지센서가 설치되어서, 제1 이동로봇(100a)이 제2 이동로봇(100b)을 기다리지 않고 청소를 완료할 수 있다.
도 10은 본 발명의 제3 실시예에 따른 복수의 로봇 청소기의 제어방법의 순서도이다.
도 10을 참조하면, 제3 실시예에 따른 로봇 청소기의 제어방법은 제2 실시예와 비교하면, 제1 이동로봇(100a)이 액체 영역(A1)을 발견해도, 청소 영역에 대한 청소를 완료한 후, 제2 이동로봇(100b)으로 액체 영역(A1) 청소 명령을 송신하는 차이점이 존재한다.
제1 이동로봇(100a)은 액체를 감지하고, 청소 영역의 청소를 완료한다(S201). 제1 이동로봇(100a)은 청소를 완료한 후, 제1 이동로봇(100a)은 정 위치로 복귀하고(S202), 제2 이동로봇(100b)으로 장애물 지도와 액체 영역(A1)의 청소 명령을 전송한다.
도 11은 본 발명의 제4 실시예에 따른 복수의 로봇 청소기의 제어방법의 순서도이다.
도 11을 참조하면, 제4 실시예에 따른 로봇 청소기의 제어방법은 제3 실시예와 비교하면, 제1 이동로봇(100a)이 액체 영역(A1)을 발견하고, 제2 이동로봇(100b)의 위치로 이동하여, 제2 이동로봇(100b)을 데리고 액체 영역(A1)으로 이동하고, 제2 이동로봇(100b)이 제1 이동로봇(100a)을 추종하여 액체 영역(A1)으로 이동하여 액체 영역(A1)을 청소하는 차이점이 존재한다.
따라서, 이러한 청소방식은 제1 이동로봇(100a)과 제2 이동로봇(100b) 사이에 장애물 지도를 공유할 필요가 없고, 제2 이동로봇(100b)에 액체를 감지하는 센서를 추가적으로 설치하지 않아도 되는 이점이 존재한다.
실시예에 따른 제어방법은 제1 이동로봇(100a)이 청소 영역 내에 존재하는 액체를 감지하는 단계(S110), 제1 이동로봇(100a)이 액체 영역(A1)을 제외한 청소 영역에 대한 청소를 완료하고 제2 이동로봇(100b) 주변으로 이동하는 단계(S201) (S202), 제1 이동로봇(100a)이 액체를 감지하면, 제2 이동로봇(100b)으로 추종명령을 송신하고, 액체 영역(A1)으로 이동하는 단계(S299), 추종명령을 수신하면, 제2 이동로봇(100b)이 제1 이동로봇(100a)을 따라서 액체 영역(A1)으로 이동하는 단계(S302) 및 제1 이동로봇(100a)이 액체 영역(A1)에 도착 한 후, 제2 이동로봇(100b)이 제1 이동로봇(100a) 주변 기설정된 영역을 청소하는 단계(S130a)를 포함할 수 있다.
제1 이동로봇(100a)은 청소영역을 청소하면서 액체를 감지하고(S110), 청소 영역의 청소를 완료한다(S201). 제1 이동로봇(100a)은 청소를 완료한 후, 제1 이동로봇(100a)은 정위치(제2 이동로봇(100b) 주변)로 복귀한다(S202). 이후, 제1 이동로봇(100a)이 액체를 감지하면, 제2 이동로봇(100b)으로 추종명령과 액체 영역(A1) 청소 명령을 송신하고, 액체 영역(A1)으로 이동한다(S299).
제2 이동로봇(100b)이 추종명령을 수행하면 제2 이동로봇(100b)은 제1 이동로봇(100a)을 따라 액체 영역(A1)으로 이동한다(S302). 제1 이동로봇(100a)은 액체 영역(A1)에 도착 한 후, 제1 이동로봇(100a) 주변 기설정된 영역을 액체 영역(A1)으로 간주하고 청소한다(S130a).
이후, 제1 이동로봇(100a)은 액체 영역(A1)에 대해 청소가 완벽하게 수행됐는지 액체 영역(A1) 내에 액체를 감지하고(S140), 액체 영역(A1)에 액체가 존재하는 경우, 제2 이동로봇(100b)에 재청소를 명령하고, 액체 영역(A1)에 액체가 존재하지 않는 경우, 정 위치로 복귀할 수 있다(S202).
제2 이동로봇(100b)은 제1 이동로봇(100a)으로 부터 재청소를 명령 받으면, 액체 영역(A1)에 대해 재청소를 수행하고, 재청소가 완료되거나, 액체 영역(A1)의 청소를 완료하면 제1 이동로봇(100a)을 추종하며 다시 정 위치로 복귀할 수 있다(S303).
이상에서는 본 발명의 바람직한 실시예에 대하여 도시하고 설명하였지만, 본 발명은 상술한 특정의 실시예에 한정되지 아니하며, 특허청구범위에서 청구하는 본 발명의 요지를 벗어남이 없이 당해 발명이 속하는 기술분야에서 통상의 지식을 가진 자에 의해 다양한 변형실시가 가능한 것은 물론이고, 이러한 변형실시들은 본 발명의 기술적 사상이나 전망으로부터 개별적으로 이해되어서는 안될 것이다.
Claims (20)
- 본체를 이동시키는 주행부;
청소영역에 대한 장애물 지도가 저장되는 메모리;
상기 청소영역에 대한 정보를 수집하는 센싱부;
제1 이동로봇과 통신하는 통신부; 및
상기 제1 이동로봇으로부터 상기 청소영역 내에 존재하는 액체 영역 위치정보를 포함하는 장애물 지도가 수신되면, 상기 본체를 상기 액체 영역으로 이동한 후, 적어도 상기 액체 영역을 청소하도록 제어하는 제어부를 포함하는 이동 로봇. - 제1항에 있어서,
상기 제어부는,
상기 장애물 지도에서 상기 액체 영역의 좌표 값을 바탕으로 상기 액체 영역을 특정하는 하는 이동 로봇. - 제1항에 있어서,
상기 액체 영역 위치정보는 상기 액체 영역 주변의 이미지를 포함하고,
상기 제어부는,
상기 센싱부에서 입력된 상기 본체 주변의 영상을 바탕으로 상기 액체 영역을 특정하는 이동 로봇. - 제1항에 있어서,
상기 제어부는,
상기 장애물 지도에서 상기 액체 영역의 좌표와 상기 통신부와 상기 제1 이동로봇 사이의 수신신호 강도(RSSI)를 바탕으로 상기 액체 영역을 특정하는 이동 로봇. - 제1항에 있어서,
상기 액체 영역 위치정보는 상기 액체 영역에서 라우터와 상기 제1 이동로봇 사이의 수신신호 강도 값을 포함하고,
상기 제어부는,
상기 장애물 지도에서 상기 액체 영역의 좌표와 상기 라우터와 상기 제1 이동로봇 사이의 수신신호 강도(RSSI) 값을 바탕으로 상기 액체 영역을 특정하는 이동 로봇. - 제1항에 있어서,
액체를 감지하는 액체 감지센서를 더 포함하고,
상기 제어부는,
상기 장애물 지도에서 상기 액체 영역의 좌표와 라우터와 상기 액체 감지센서에서 감지된 감지 값을 바탕으로 상기 액체 영역을 특정하는 이동 로봇. - 제1항에 있어서,
상기 제어부는,
상기 액체 영역의 청소를 완료 후에, 상기 본체가 상기 제1 이동로봇을 따라가며 청소하도록 상기 주행부를 제어하는 이동 로봇. - 제1항에 있어서,
상기 제어부는,
상기 액체 영역의 청소를 완료 후에, 상기 본체가 정 위치로 복귀하도록 상기 주행부를 제어하는 이동 로봇. - 제1 이동 로봇과 상기 제1 이동 로봇과 청소 방식이 상이한 제2 이동 로봇을 포함하는 복수의 이동 로봇의 제어방법에 있어서,
상기 제1 이동 로봇이 청소 영역 내에 존재하는 액체를 감지하는 단계;
상기 제1 이동 로봇이 액체를 감지하면, 상기 제2 이동 로봇으로 액체 영역 위치정보를 포함하는 장애물 지도와 상기 액체 영역 청소명령을 송신하는 단계;
상기 제2 이동 로봇이 상기 액체 영역 청소명령을 수신하면, 상기 제2 이동 로봇이 상기 액체 영역으로 이동하는 단계; 및
상기 제2 이동 로봇이 상기 액체 영역을 청소하는 단계를 포함하는 복수의 이동 로봇의 제어방법.
- 제9항에 있어서,
상기 제2 이동 로봇은 상기 장애물 지도에서 상기 액체 영역의 좌표 값, 상기 액체 영역 주변의 이미지, 상기 제1 이동 로봇과 상기 제2 이동 로봇 사이의 수신신호 강도 값 및 라우터와 상기 각 이동 로봇들 사이의 수신신호 강도 값 중 적어도 하나를 바탕으로 상기 액체 영역을 특정하는 복수의 이동 로봇의 제어방법. - 제9항에 있어서,
상기 제1 이동 로봇은,
상기 제2 이동 로봇이 상기 액체 영역으로 이동을 완료할 때 까지, 상기 액체 영역의 주변에서 대기하는 복수의 이동 로봇의 제어방법. - 제11항에 있어서,
상기 제1 이동 로봇은,
상기 제2 이동 로봇이 상기 액체 영역의 청소를 완료한 후에 상기 액체 영역에 액체가 존재하는 지 판단하는 단계를 더 포함하는 복수의 이동 로봇의 제어방법. - 제12항에 있어서,
상기 제1 이동 로봇은,
상기 제2 이동 로봇이 상기 액체 영역의 청소를 완료한 후에 상기 액체 영역에 액체가 존재한다고 판단하는 경우, 상기 제2 이동 로봇에 상기 액체 영역의 재청소를 명령하는 신호를 송신하는 단계를 더 포함하는 복수의 이동 로봇의 제어방법. - 제12항에 있어서,
상기 제1 이동 로봇은,
상기 제2 이동 로봇이 상기 액체 영역의 청소를 완료한 후에 상기 액체 영역에 액체가 존재하지 않는다고 판단하는 경우, 상기 청소 영역에 대한 청소를 수행하는 단계를 더 포함하는 복수의 이동 로봇의 제어방법. - 제9항에 있어서,
상기 제2 이동 로봇은,
상기 액체 영역에 대한 청소를 완료한 후, 상기 제1 이동 로봇을 따라가며 청소하는 단계를 더 포함하는 복수의 이동 로봇의 제어방법. - 제9항에 있어서,
상기 제2 이동 로봇은,
상기 액체 영역에 대한 청소를 완료한 후, 정 위치로 복귀하는 단계를 더 포함하는 복수의 이동 로봇의 제어방법. - 제9항에 있어서,
상기 제1 이동 로봇은,
상기 제2 이동 로봇으로 상기 액체 영역 청소명령을 송신 한 후, 상기 액체 영역을 제외한 상기 청소 영역에 대한 청소를 수행하는 단계를 더 포함하는 복수의 이동 로봇의 제어방법. - 제1 이동 로봇과 상기 제1 이동 로봇과 청소 방식이 상이한 제2 이동 로봇을 포함하는 복수의 이동 로봇의 제어방법에 있어서,
상기 제1 이동 로봇이 청소 영역 내에 존재하는 액체를 감지하는 단계;
상기 제1 이동 로봇이 액체 영역을 제외한 상기 청소 영역에 대한 청소를 완료하고 정 위치로 복귀하는 단계;
상기 제1 이동 로봇이 액체를 감지하면, 상기 제2 이동 로봇으로 액체 영역 위치정보를 포함하는 장애물 지도와 상기 액체 영역 청소명령을 송신하는 단계;
상기 제2 이동 로봇이 상기 액체 영역 청소명령을 수신하면, 상기 제2 이동 로봇이 상기 액체 영역으로 이동하는 단계; 및
상기 제2 이동 로봇이 상기 액체 영역을 청소하는 단계를 포함하는 복수의 이동 로봇의 제어방법. - 제18항에 있어서,
상기 제2 이동 로봇은,
상기 액체 영역에 대한 청소를 완료한 후, 정 위치로 복귀하는 단계를 더 포함하는 복수의 이동 로봇의 제어방법. - 제1 이동 로봇과 상기 제1 이동 로봇과 청소 방식이 상이한 제2 이동 로봇을 포함하는 복수의 이동 로봇의 제어방법에 있어서,
상기 제1 이동 로봇이 청소 영역 내에 존재하는 액체를 감지하는 단계;
상기 제1 이동 로봇이 액체 영역을 제외한 상기 청소 영역에 대한 청소를 완료하고 상기 제2 이동 로봇 주변으로 이동하는 단계;
상기 제1 이동 로봇이 액체를 감지하면, 상기 제2 이동 로봇으로 추종명령을 송신하고, 상기 액체 영역으로 이동하는 단계;
상기 추종명령을 수신하면, 상기 제2 이동 로봇이 상기 제1 이동 로봇을 따라서 상기 액체 영역으로 이동하는 단계; 및
상기 제1 이동 로봇이 상기 액체 영역에 도착 한 후, 상기 제2 이동 로봇이 상기 제1 이동 로봇 주변 기설정된 영역을 청소하는 단계를 포함하는 복수의 이동 로봇의 제어방법.
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190006059A KR102234641B1 (ko) | 2019-01-17 | 2019-01-17 | 이동 로봇 및 복수의 이동 로봇의 제어방법 |
| PCT/KR2020/000860 WO2020149696A1 (en) | 2019-01-17 | 2020-01-17 | Mobile robot and method of controlling plurality of mobile robots |
| EP20741912.8A EP3911480B1 (en) | 2019-01-17 | 2020-01-17 | Mobile robot and method of controlling plurality of mobile robots |
| AU2020209330A AU2020209330B2 (en) | 2019-01-17 | 2020-01-17 | Mobile robot and method of controlling plurality of mobile robots |
| CN202080022119.2A CN113631334B (zh) | 2019-01-17 | 2020-01-17 | 移动机器人和控制多个移动机器人的方法 |
| US16/745,950 US11787041B2 (en) | 2019-01-17 | 2020-01-17 | Mobile robot and method of controlling a plurality of mobile robots |
| TW109101805A TWI731555B (zh) | 2019-01-17 | 2020-01-17 | 移動式機器人及控制複數個移動式機器人的方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190006059A KR102234641B1 (ko) | 2019-01-17 | 2019-01-17 | 이동 로봇 및 복수의 이동 로봇의 제어방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200094817A true KR20200094817A (ko) | 2020-08-10 |
| KR102234641B1 KR102234641B1 (ko) | 2021-03-31 |
Family
ID=71609582
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020190006059A KR102234641B1 (ko) | 2019-01-17 | 2019-01-17 | 이동 로봇 및 복수의 이동 로봇의 제어방법 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US11787041B2 (ko) |
| EP (1) | EP3911480B1 (ko) |
| KR (1) | KR102234641B1 (ko) |
| CN (1) | CN113631334B (ko) |
| AU (1) | AU2020209330B2 (ko) |
| TW (1) | TWI731555B (ko) |
| WO (1) | WO2020149696A1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022075614A1 (ko) * | 2020-10-08 | 2022-04-14 | 엘지전자 주식회사 | 이동 로봇 시스템 |
| WO2023171877A1 (ko) * | 2022-03-11 | 2023-09-14 | 삼성전자 주식회사 | 로봇 및 그 제어 방법 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102096564B1 (ko) * | 2018-06-25 | 2020-04-02 | 엘지전자 주식회사 | 복수의 자율주행 청소기 |
| CN114502292A (zh) * | 2019-07-15 | 2022-05-13 | 腾狮国际私人有限公司 | 一种协同清洁系统和装置 |
| CN111612342B (zh) * | 2020-05-22 | 2024-03-15 | 格力博(江苏)股份有限公司 | 一种割草机队管理装置、管理方法以及管理系统 |
| CN111539399B (zh) * | 2020-07-13 | 2021-06-29 | 追创科技(苏州)有限公司 | 自移动设备的控制方法、装置、存储介质及自移动设备 |
| TWI801829B (zh) * | 2021-03-26 | 2023-05-11 | 大陸商信泰光學(深圳)有限公司 | 移動裝置及其移動方法 |
| SE2150996A1 (en) * | 2021-08-12 | 2023-02-13 | Husqvarna Ab | Improved cooperation of robotic working tools in a robotic working tool system |
| CN113910245A (zh) * | 2021-11-17 | 2022-01-11 | 珠海格力智能装备有限公司 | 基于大数据聚类的工业机器人控制方法 |
| CN114176460B (zh) * | 2021-11-19 | 2023-04-07 | 科大讯飞股份有限公司 | 清扫控制方法、相关装置、清扫方法、设备及清扫系统 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20120058945A (ko) * | 2010-11-30 | 2012-06-08 | 이커스텍(주) | 무선 네트워크기반 로봇 청소기 제어 장치 및 방법 |
| KR20140138555A (ko) | 2014-10-24 | 2014-12-04 | 김태윤 | 에코 마그네슘 합금 제조방법과 제조장치 |
| KR20170047790A (ko) * | 2015-10-23 | 2017-05-08 | 아주대학교산학협력단 | 액체 제거 로봇 청소기 |
| KR20170048815A (ko) * | 2015-10-27 | 2017-05-10 | 삼성전자주식회사 | 청소 로봇 및 그 제어방법 |
Family Cites Families (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101240732B1 (ko) * | 2005-02-18 | 2013-03-07 | 아이로보트 코퍼레이션 | 습식 및 건식 청소를 위한 자동 표면 청소 로봇 |
| KR20080001001A (ko) * | 2006-06-28 | 2008-01-03 | 삼성전자주식회사 | 로봇 청소기 시스템 및 그 제어 방법 |
| US20090062974A1 (en) * | 2007-09-03 | 2009-03-05 | Junichi Tamamoto | Autonomous Mobile Robot System |
| KR101641237B1 (ko) * | 2009-11-20 | 2016-07-21 | 엘지전자 주식회사 | 로봇 청소기 및 이의 제어 방법 |
| KR20110119118A (ko) | 2010-04-26 | 2011-11-02 | 엘지전자 주식회사 | 로봇 청소기, 및 이를 이용한 원격 감시 시스템 |
| US20130145572A1 (en) * | 2011-07-27 | 2013-06-13 | Irobot Corporation | Surface Cleaning Robot |
| KR101954144B1 (ko) * | 2012-06-08 | 2019-03-05 | 엘지전자 주식회사 | 로봇 청소기와, 이의 제어 방법, 및 이를 포함한 로봇 청소 시스템 |
| KR102122861B1 (ko) * | 2013-06-17 | 2020-06-29 | 삼성전자주식회사 | 로봇청소기 및 그 제어 방법 |
| JP5897517B2 (ja) | 2013-08-21 | 2016-03-30 | シャープ株式会社 | 自律移動体 |
| CN104977929B (zh) * | 2014-04-09 | 2019-04-12 | 燕成祥 | 导引式清洁装置与导引式清洁组 |
| DE102014105460A1 (de) | 2014-04-16 | 2015-10-22 | Vorwerk & Co. Interholding Gmbh | Selbstfahrendes Bodenreinigungsgerät mit einem einem Führungsfahrzeug folgenden Folgewerkzeug |
| KR102293615B1 (ko) * | 2014-07-02 | 2021-08-26 | 삼성전자주식회사 | 청소 로봇 및 그 제어 방법 |
| KR101575597B1 (ko) * | 2014-07-30 | 2015-12-08 | 엘지전자 주식회사 | 로봇 청소 시스템 및 로봇 청소기의 제어방법 |
| CN104605794A (zh) * | 2014-09-23 | 2015-05-13 | 东莞市万锦电子科技有限公司 | 地面清洁机器人系统 |
| US10660496B2 (en) * | 2014-09-24 | 2020-05-26 | Samsung Electronics Co., Ltd. | Cleaning robot and method of controlling the cleaning robot |
| KR20160058594A (ko) * | 2014-11-17 | 2016-05-25 | 삼성전자주식회사 | 로봇 청소기, 단말장치 및 그 제어 방법 |
| KR102328252B1 (ko) * | 2015-02-13 | 2021-11-19 | 삼성전자주식회사 | 청소 로봇 및 그 제어방법 |
| KR20160104429A (ko) * | 2015-02-26 | 2016-09-05 | 에브리봇 주식회사 | 로봇 청소기 및 그의 제어 방법 |
| KR102445064B1 (ko) * | 2015-09-03 | 2022-09-19 | 에이비 엘렉트로룩스 | 로봇 청소 장치의 시스템 |
| US10335949B2 (en) * | 2016-01-20 | 2019-07-02 | Yujin Robot Co., Ltd. | System for operating mobile robot based on complex map information and operating method thereof |
| US9987752B2 (en) | 2016-06-10 | 2018-06-05 | Brain Corporation | Systems and methods for automatic detection of spills |
| US10383498B2 (en) * | 2016-10-05 | 2019-08-20 | Lenovo (Singapore) Pte. Ltd. | Systems and methods to command a robotic cleaning device to move to a dirty region of an area |
| CN106527446B (zh) * | 2016-12-02 | 2020-11-13 | 北京小米移动软件有限公司 | 扫地机器人的控制方法及装置 |
| JP6931994B2 (ja) * | 2016-12-22 | 2021-09-08 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 自律移動体、移動制御方法及び移動制御プログラム |
| DE102016125319A1 (de) | 2016-12-22 | 2018-06-28 | Vorwerk & Co. Interholding Gmbh | Verfahren zum Betrieb eines sich selbsttätig fortbewegenden Fahrzeugs |
| KR102235270B1 (ko) | 2017-01-18 | 2021-04-01 | 엘지전자 주식회사 | 이동 로봇 시스템 및 그 제어방법 |
| KR102235271B1 (ko) | 2017-02-27 | 2021-04-01 | 엘지전자 주식회사 | 이동 로봇 및 그 제어방법 |
| KR102348041B1 (ko) * | 2017-03-28 | 2022-01-05 | 엘지전자 주식회사 | 복수의 이동 로봇을 포함하는 로봇 시스템의 제어 방법 |
| WO2018223259A1 (zh) * | 2017-06-05 | 2018-12-13 | 深圳市海和高新技术有限公司 | 自动升降式扫地机器人 |
| AU2018203588B2 (en) * | 2017-06-05 | 2019-11-14 | Bissell Inc. | Autonomous floor cleaning system |
| KR102021834B1 (ko) * | 2017-07-12 | 2019-09-17 | 엘지전자 주식회사 | 이동 로봇 시스템 및 그 제어방법 |
| CN108958232A (zh) | 2017-12-07 | 2018-12-07 | 炬大科技有限公司 | 一种基于深度视觉的移动扫地机器人slam装置及算法 |
| KR20190073140A (ko) * | 2017-12-18 | 2019-06-26 | 엘지전자 주식회사 | 복수의 로봇 청소기 및 그 제어방법 |
| CN108247647B (zh) * | 2018-01-24 | 2021-06-22 | 速感科技(北京)有限公司 | 一种清洁机器人 |
| CN108888187A (zh) | 2018-05-31 | 2018-11-27 | 四川斐讯信息技术有限公司 | 一种基于深度相机的扫地机器人 |
| US11185207B2 (en) * | 2018-07-24 | 2021-11-30 | Qualcomm Incorporated | Managing cleaning robot behavior |
-
2019
- 2019-01-17 KR KR1020190006059A patent/KR102234641B1/ko active IP Right Grant
-
2020
- 2020-01-17 TW TW109101805A patent/TWI731555B/zh active
- 2020-01-17 CN CN202080022119.2A patent/CN113631334B/zh active Active
- 2020-01-17 WO PCT/KR2020/000860 patent/WO2020149696A1/en unknown
- 2020-01-17 AU AU2020209330A patent/AU2020209330B2/en active Active
- 2020-01-17 EP EP20741912.8A patent/EP3911480B1/en active Active
- 2020-01-17 US US16/745,950 patent/US11787041B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20120058945A (ko) * | 2010-11-30 | 2012-06-08 | 이커스텍(주) | 무선 네트워크기반 로봇 청소기 제어 장치 및 방법 |
| KR20140138555A (ko) | 2014-10-24 | 2014-12-04 | 김태윤 | 에코 마그네슘 합금 제조방법과 제조장치 |
| KR20170047790A (ko) * | 2015-10-23 | 2017-05-08 | 아주대학교산학협력단 | 액체 제거 로봇 청소기 |
| KR20170048815A (ko) * | 2015-10-27 | 2017-05-10 | 삼성전자주식회사 | 청소 로봇 및 그 제어방법 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022075614A1 (ko) * | 2020-10-08 | 2022-04-14 | 엘지전자 주식회사 | 이동 로봇 시스템 |
| KR20220047000A (ko) * | 2020-10-08 | 2022-04-15 | 엘지전자 주식회사 | 이동 로봇 시스템 |
| WO2023171877A1 (ko) * | 2022-03-11 | 2023-09-14 | 삼성전자 주식회사 | 로봇 및 그 제어 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102234641B1 (ko) | 2021-03-31 |
| EP3911480A4 (en) | 2022-11-16 |
| WO2020149696A1 (en) | 2020-07-23 |
| TWI731555B (zh) | 2021-06-21 |
| EP3911480B1 (en) | 2024-05-01 |
| US11787041B2 (en) | 2023-10-17 |
| AU2020209330A1 (en) | 2021-09-02 |
| TW202032304A (zh) | 2020-09-01 |
| US20200230806A1 (en) | 2020-07-23 |
| CN113631334B (zh) | 2024-04-23 |
| CN113631334A (zh) | 2021-11-09 |
| AU2020209330B2 (en) | 2023-07-20 |
| EP3911480A1 (en) | 2021-11-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102234641B1 (ko) | 이동 로봇 및 복수의 이동 로봇의 제어방법 | |
| KR102470532B1 (ko) | 복수의 자율주행 이동 로봇 | |
| KR102015498B1 (ko) | 복수의 자율주행 청소기 및 그 제어방법 | |
| KR20200103203A (ko) | 복수의 자율주행 이동 로봇 | |
| KR102369661B1 (ko) | 이동 로봇 및 복수의 이동 로봇의 제어방법 | |
| KR102309303B1 (ko) | 로봇 청소기 및 그 제어 방법 | |
| KR102198187B1 (ko) | 이동 로봇 | |
| KR102096564B1 (ko) | 복수의 자율주행 청소기 | |
| KR102210360B1 (ko) | 이동 로봇 및 이동 로봇의 제어방법 | |
| KR102179057B1 (ko) | 복수의 자율주행 청소기 | |
| KR102217540B1 (ko) | 이동 로봇 및 복수의 이동 로봇의 제어방법 | |
| KR102309898B1 (ko) | 도킹기기 및 이동 로봇 시스템 | |
| KR102081340B1 (ko) | 복수의 로봇 청소기 및 그 제어방법 | |
| KR102535719B1 (ko) | 이동 로봇 및 이동 로봇의 제어방법 | |
| US12004702B2 (en) | Mobile robot and method of controlling mobile robot | |
| KR20200133544A (ko) | 이동 로봇 및 그 제어방법 | |
| KR102390040B1 (ko) | 로봇 청소기 및 그 제어 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| AMND | Amendment | ||
| E601 | Decision to refuse application | ||
| X091 | Application refused [patent] | ||
| AMND | Amendment | ||
| X701 | Decision to grant (after re-examination) | ||
| GRNT | Written decision to grant |