KR20200087604A - 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법 - Google Patents
모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법 Download PDFInfo
- Publication number
- KR20200087604A KR20200087604A KR1020190004136A KR20190004136A KR20200087604A KR 20200087604 A KR20200087604 A KR 20200087604A KR 1020190004136 A KR1020190004136 A KR 1020190004136A KR 20190004136 A KR20190004136 A KR 20190004136A KR 20200087604 A KR20200087604 A KR 20200087604A
- Authority
- KR
- South Korea
- Prior art keywords
- motor
- current
- waveform current
- stator
- waveform
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 68
- 238000001514 detection method Methods 0.000 claims description 20
- 230000004907 flux Effects 0.000 claims description 12
- 238000005516 engineering process Methods 0.000 description 7
- 238000006243 chemical reaction Methods 0.000 description 6
- 238000012986 modification Methods 0.000 description 5
- 230000004048 modification Effects 0.000 description 5
- 239000003990 capacitor Substances 0.000 description 4
- 238000005406 washing Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000009499 grossing Methods 0.000 description 3
- 230000001360 synchronised effect Effects 0.000 description 3
- 238000004364 calculation method Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 229920006395 saturated elastomer Polymers 0.000 description 2
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 239000003795 chemical substances by application Substances 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images






Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/12—Stator flux based control involving the use of rotor position or rotor speed sensors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/34—Arrangements for starting
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
- H02P21/18—Estimation of position or speed
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/22—Current control, e.g. using a current control loop
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters with pulse width modulation
- H02P27/12—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters with pulse width modulation pulsing by guiding the flux vector, current vector or voltage vector on a circle or a closed curve, e.g. for direct torque control
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/18—Circuit arrangements for detecting position without separate position detecting elements
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2209/00—Indexing scheme relating to controlling arrangements characterised by the waveform of the supplied voltage or current
- H02P2209/11—Sinusoidal waveform
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
- Control Of Ac Motors In General (AREA)
Abstract
본 명세서는 모터의 운전을 시작하여 회전자의 위치를 정렬할 시, 진동 및 소음이 저감되도록 상기 회전자를 정렬시키는 특정 전류를 고정자에 인가하여 상기 회전자의 위치를 정렬시키는 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법에 관한 것이다.
Description
본 명세서는 모터의 위치 검출을 위해 모터의 위치를 정렬시키는 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법에 관한 것이다.
본 발명의 배경이 되는 기술은, 가전 기기에 사용되는 모터의 위치 검출 및 모터의 위치 정렬 제어에 관한 것이다.
가전 기기에 사용되는 모터는 동작원리상 회전자의 정확한 위치를 파악해야만 전류 제어가 가능하다. 위치 정보를 얻기 위해 엔코더, 레졸버, 홀센서 등을 사용할 수 있는데, 이러한 위치 검출 수단은 일반적으로 고가이고, 배선이나 구조가 복잡하여 사용 환경에 제한을 받는다. 이에 따라 최근에는 위치 검출 수단을 이용하지 않는 센서리스 제어가 활발히 연구되고 있으나, 센서리스 제어는 초기 위치 검출의 문제가 있다. 모터(회전자)의 초기 위치가 정확하지 않으면 기동 토크가 작아지고, 모터의 회전 방향이 역전하는 문제가 발생하여 위험을 초래할 수 있다.
기존의 세탁기 모터의 센서리스 제어에서는 초기의 기동 특성을 안정화시키고 감지 성능을 안정시키기 위하여 초기 위치 정렬(Align)을 수행한다. 초기 위치 정렬 동작은, 도 1에 도시된 바와 같이 모터의 자속축인 d축에 직류 전류를 인가하여 모터의 위치를 특정 위치에 정렬시킨 후 위치를 검출하게 되는데, 이 때의 전압과 전류 정보를 이용하여 센서리스 제어에 필수적인 파라미터인 고정자 저항(Rs)을 검출하게 된다. 이 경우, 전압 오차(△V)가 존재한다면 저항의 검출 값에서도 저항 오차(△Rs)가 존재하게 되어, 정확한 검출이 이루어지지 못하게 되는 문제가 발생하게 된다.
한편, 한국공개특허 10-2016-0136931(2016년 11월 30일 공개, 이하 선행문헌이라 칭한다)에는 상기와 같은 오차 문제를 개선하기 위한 방법으로, 2-point 연산을 통하여 공통적으로 포함되어 있는 전압 오차(△V)를 제거하여 고정자 저항을 검출하는 기술이 개시되어 있다. 그러나, 선행문헌에 개시된 기술은 직류 전류를 인가함으로써 세탁기의 터브에 진동이 발생하게 되고, 이로 인한 소음이 발생하게 되는 문제가 있다. 또한, 선행문헌에 개시된 기술은 일정 시간(3초 내외) 동안 정렬 동작을 수행하게 됨으로써, 세탁기의 실동률을 낮추게 되는 한계가 있었다.
즉, 종래에 제안된 기술은 고정자의 저항의 검출 정확성을 부분적으로 개선할 수 있으나, 직류 전류의 인가로 인한 모터(터브)의 진동 및 소음 발생의 문제 및 실동률의 문제를 야기시키게 되는 한계가 있었다.
본 발명은 상술한 바와 같은 종래기술의 한계를 개선하는 것을 과제로 한다.
즉, 본 명세서는 상술한 바와 같은 종래기술의 한계를 개선할 수 있는 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법을 제공하고자 한다.
구체적으로는, 모터의 정렬로 인한 진동 및 소음 발생을 방지할 수 있는 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법을 제공하고자 한다.
또한, 모터의 정렬 시간을 감소시킬 수 있는 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법을 제공하고자 한다.
게다가, 모터의 운전 시작 전 회전자를 정확하게 정렬시켜, 모터의 위치 및 고정자 저항을 정확하게 검출할 수 있는 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법을 제공하고자 한다.
아울러, 모터의 위치 및 고정자 저항을 정확하게 검출하여, 모터의 운전을 정확하고 안정적으로 제어할 수 있는 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법을 제공하고자 한다.
상술한 바와 같은 과제를 해결하기 위한 본 발명에 따른 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법은, 모터의 운전 시작시, 상기 모터의 고정자에 특정 전류를 인가하여 상기 모터의 회전자의 위치를 정렬시키는 것을 해결 수단으로 한다.
구체적으로는, 상기 회전자의 정렬 시 진동 및 소음이 저감되도록 상기 회전자를 정렬시키는 전류를 인가함으로써, 상기 회전자의 위치를 정렬시킨다.
또한, 상기 전류를 복수 회 인가하여, 각각의 인가 결과에 따른 전압의 측정 결과를 근거로 고정자 저항을 검출한다.
즉, 본 발명에 따른 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법은, 모터의 운전을 시작하여 상기 회전자의 위치를 정렬할 시 진동 및 소음이 저감되도록 상기 회전자를 정렬시키는 전류를 복수 회 인가하여 상기 회전자의 위치를 정렬시키는 것을 기술적 특징으로 한다.
이와 같은 해결 수단을 통해 본 발명에 따른 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법은, 상기 회전자의 정렬 시 진동 및 소음이 발생되지 않도록 상기 회전자를 정렬시키게 되어, 상술한 바와 같은 과제를 해결하게 된다.
상기와 같은 기술적 특징은, 모터에 구동 전원을 인가하는 인버터부를 통해 모터의 구동을 제어하는 제어 장치, 제어 시스템 및 제어 방법 등으로 실시될 수 있으며, 본 명세서는 상기와 같은 기술적 특징을 과제 해결 수단으로 하는 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법의 실시 예를 제공한다.
상기와 같은 기술적 특징을 과제 해결 수단으로 하는 본 발명에 따른 모터 제어 장치의 실시 예는, 스위칭 동작을 통해 외부 전원으로부터 입력된 입력 전류를 상기 모터를 구동하기 위한 구동 전류로 변환하여 상기 모터에 출력하는 인버터부 및 상기 모터에 흐르는 모터 전류를 검출하여, 검출 결과를 근거로 상기 인버터부의 스위칭 동작을 제어하여 상기 모터의 운전을 제어하는 제어부를 포함하고, 상기 제어부는, 상기 모터의 운전을 시작하기 전, 상기 모터의 고정자에 시간에 따라 크기가 변하는 형태의 제1 파형 전류 및 제2 파형 전류가 인가되도록 상기 스위칭 동작을 제어하여 상기 모터의 회전자의 위치를 정렬시킨다.
또한, 상기와 같은 기술적 특징을 과제 해결 수단으로 하는 본 발명에 따른 모터 제어 시스템의 실시 예는, 모터 및 스위칭 동작을 통해 외부 전원으로부터 입력된 입력 전류를 상기 모터를 구동하기 위한 구동 전류로 변환하여 상기 모터에 출력하는 인버터부를 포함하여, 상기 인버터부의 스위칭 동작을 통해 상기 모터의 운전을 제어하는 제어 장치를 포함하고, 상기 제어 장치는, 상기 모터가 운전을 시작하는 경우, 상기 모터의 고정자에 시간에 따라 크기가 변하는 형태의 제1 파형 전류 및 제2 파형 전류를 인가하여 상기 모터의 회전자의 위치를 정렬시킨다.
아울러, 상기와 같은 기술적 특징을 과제 해결 수단으로 하는 본 발명에 따른 모터 제어 방법의 실시 예는, 스위칭 동작을 통해 외부 전원으로부터 입력된 입력 전류를 상기 모터를 구동하기 위한 구동 전류로 변환하여 상기 모터에 출력하는 인버터부 및 상기 모터에 흐르는 모터 전류를 검출하여, 검출 결과를 근거로 상기 인버터부의 스위칭 동작을 제어하여 상기 모터의 운전을 제어하는 제어부를 포함하는 모터 제어 장치의 모터 제어 방법으로, 상기 모터의 고정자에 시간에 따라 크기가 변하는 형태의 제1 파형 전류를 인가하는 단계, 상기 고정자에 시간에 따라 크기가 변하는 형태의 제2 파형 전류를 인가하는 단계 및 상기 제1 파형 전류 및 상기 제2 파형 전류 각각을 인가한 결과를 근거로 상기 고정자의 고정자 저항을 검출하는 단계를 포함한다.
상술한 바와 같은 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법의 실시 예들은, 모터의 초기 운전을 제어하는 제어 장치, 제어 시스템 및 제어 방법으로 실시될 수 있다.
또한, 상술한 바와 같은 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법의 실시 예들은, 모터의 위치를 정렬시키는 제어 장치, 제어 시스템 및 제어 방법으로 실시될 수도 있다.
특히, 모터의 위치를 검출하는 제어 장치, 제어 시스템 및 제어 방법으로 실시될 수 있다.
본 발명에 따른 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법은, 회전자의 정렬 시 진동 및 소음이 저감되도록 상기 회전자를 정렬시키는 전류를 복수 회 인가하여 상기 회전자의 위치를 정렬시킴으로써, 모터의 정렬로 인한 진동 및 소음 발생을 방지하고, 모터의 정렬 시간을 감소시킬 수 있게 되는 효과가 있다.
또한, 본 발명에 따른 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법은, 회전자의 정렬 시 진동 및 소음이 저감되도록 상기 회전자를 정렬시키는 전류를 복수 회 인가하여 상기 회전자의 위치를 정렬시킴으로써, 모터의 운전 시작 전 회전자를 정확하게 정렬시키고, 모터의 위치 및 고정자 저항을 정확하게 검출할 수 있게 되는 효과가 있다.
게다가, 본 발명에 따른 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법은, 모터의 위치 및 고정자 저항을 정확하게 검출하게 됨으로써, 모터의 운전을 정확하고 안정적으로 제어할 수 있게 되는 효과가 있다.
결과적으로, 본 발명에 따른 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법은, 종래기술의 한계를 개선하게 됨은 물론, 모터 제어의 안정성, 정확성, 용이성, 효용성, 활용성 및 신뢰성을 증대시킬 수 있게 되는 효과가 있다.
도 1은 종래의 직류 전류를 인가하여 위치를 정렬시키는 경우의 위치 정렬 결과를 나타낸 예시도.
도 2는 본 발명에 따른 모터 제어 장치를 포함하는 모터 제어 시스템의 구성을 나타낸 구성도.
도 3은 본 발명에 따른 모터 제어 장치의 구성을 나타낸 구성도.
도 4는 본 발명에 따른 모터 제어 장치의 실시 예에 따른 제어부의 구성을 나타낸 구성도.
도 5는 본 발명에 따른 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법의 실시 예에 따른 파형 전류의 예시를 나타낸 예시도.
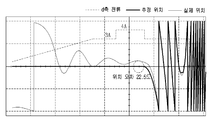
도 6은 본 발명에 따른 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법의 실시 예에 따른 위치 정렬의 결과를 나타낸 예시도.
도 7은 본 발명에 따른 모터 제어 방법의 순서를 나타낸 순서도.
도 2는 본 발명에 따른 모터 제어 장치를 포함하는 모터 제어 시스템의 구성을 나타낸 구성도.
도 3은 본 발명에 따른 모터 제어 장치의 구성을 나타낸 구성도.
도 4는 본 발명에 따른 모터 제어 장치의 실시 예에 따른 제어부의 구성을 나타낸 구성도.
도 5는 본 발명에 따른 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법의 실시 예에 따른 파형 전류의 예시를 나타낸 예시도.
도 6은 본 발명에 따른 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법의 실시 예에 따른 위치 정렬의 결과를 나타낸 예시도.
도 7은 본 발명에 따른 모터 제어 방법의 순서를 나타낸 순서도.
이하, 첨부된 도면을 참조하여 본 명세서에 개시된 실시 예들을 상세히 설명하되, 도면 부호에 관계없이 동일하거나 유사한 구성 요소는 동일한 참조 번호를 부여하고 이에 대한 중복되는 설명은 생략하되, 본 명세서에 개시된 실시 예를 설명함에 있어서 관련된 공지 기술에 대한 구체적인 설명이 본 명세서에 개시된 실시 예의 요지를 흐릴 수 있다고 판단되는 경우 그 상세한 설명을 생략한다.
또한, 첨부된 도면은 본 명세서에 개시된 실시 예를 쉽게 이해할 수 있도록 하기 위한 것일 뿐, 첨부된 도면에 의해 본 명세서에 개시된 기술적 사상이 제한되지 않으며, 본 발명의 사상 및 기술 범위에 포함되는 모든 변경, 균등물 내지 대체물을 포함하는 것으로 이해되어야 한다.
먼저, 본 발명에 따른 모터 제어 장치(이하, 제어 장치라 칭한다)를 설명한다.
상기 제어 장치(100)는, 도 2에 도시된 바와 같이 모터(200)를 제어하는 모터 제어 시스템(1000)에서, 모터(200)의 구동을 제어하는 장치를 의미한다.
상기 제어 장치(100)로 운전을 제어하는 상기 모터(200)는, 고정자와 회전자를 구비하며, 3상 각 상의 고정자의 코일에 소정 주파수의 교류 전원이 인가되어, 회전자가 회전을 하게 되는 3상 모터를 의미한다.
이를테면, 표면 부착형 영구자석 동기전동기(Surface-Mounted Permanent-Magnet Synchronous Motor; SMPMSM), 매입형 영구자석 동기전동기(Interior Permanent Magnet Synchronous Motor; IPMSM) 및 동기 릴럭턴스 전동기(Synchronous Reluctance Motor; Synrm) 중 하나 일 수 있다.
상기 제어 장치(100)는, 상기 모터(200)에 구동 전원을 공급하여, 상기 모터(200)의 구동을 제어하는 장치일 수 있다.
상기 제어 장치(100)는 또한, 상기 모터(200)의 운전을 제어하여 상기 모터(200)가 포함된 압축기의 구동을 제어하는 장치일 수 있다.
상기 제어 장치(100)는, 인버터 방식으로 상기 모터(200)를 제어하는 장치일 수 있다.
즉, 상기 제어 장치(100)는, 상기 모터(200)의 구동을 제어하는 인버터이거나, 또는 상기 인버터를 포함하는 장치일 수 있다.
상기 제어 장치(100)는, 상기 인버터의 스위칭 동작을 제어하여, 상기 모터(200)에 인가되는 상기 구동 전원을 제어함으로써, 상기 모터(200)의 운전을 제어할 수 있다.
상기 제어 장치(100)는, 상기 스위칭 동작의 제어를 통해 상기 구동 전원을 제어하여, 상기 모터(200)의 운전을 제어할 수 있다.
상기 제어 장치(100)는, 상기 모터(200)의 초기 운전을 제어하는 장치일 수 있다
상기 제어 장치(100)는, 센서리스 방식으로 상기 모터(200)의 운전을 제어하는 장치일 수 있다
상기 제어 장치(100)는, 도 2에 도시된 바와 같이, 스위칭 동작을 통해 외부 전원(10)으로부터 입력된 입력 전류를 상기 모터(200)를 구동하기 위한 구동 전류로 변환하여 상기 모터(200)에 출력하는 인버터부(110) 및 상기 모터(200)에 흐르는 모터 전류를 검출하여, 검출 결과를 근거로 상기 인버터부(110)의 스위칭 동작을 제어하여 상기 모터(200)의 운전을 제어하는 제어부(120)를 포함한다.
즉, 상기 제어 장치(100)는, 상기 제어부(120)가 상기 모터 전류의 검출 결과를 근거로 상기 인버터부(110)의 상기 스위칭 동작을 제어하여, 상기 스위칭 동작을 통해 변환되는 상기 구동 전류를 제어하게 됨으로써, 상기 구동 전류의 제어를 통해 상기 모터(200)의 운전을 제어하게 된다.
이와 같이 상기 인버터부(110) 및 상기 제어부(120)를 포함하는 상기 제어 장치(100)에서 상기 제어부(120)는, 상기 모터(200)의 운전을 시작하기 전, 상기 모터(200)의 고정자에 시간에 따라 크기가 변하는 형태의 제1 파형 전류 및 제2 파형 전류가 인가되도록 상기 스위칭 동작을 제어하여 상기 모터(200)의 회전자의 위치를 정렬시킨다.
즉, 상기 제어 장치(100)는, 상기 모터(200)의 운전 시작 시, 상기 인버터부(110)의 스위칭 동작을 제어하여 상기 고정자에 상기 제1 파형 전류 및 상기 제2 파형 전류가 인가되도록 제어함으로써, 상기 회전자의 위치를 정렬시키게 된다.
이처럼, 상기 모터(200)의 운전을 시작하기 전, 상기 회전자의 위치를 정렬시키게 됨으로써, 상기 회전자의 위치 및 상기 고정자의 고정자 저항을 정확하게 검출할 수 있게 된다.
이와 같이 상기 회전자의 위치 및 상기 고정자 저항을 정확하게 검출하게 됨으로써, 검출 결과를 근거로 한 상기 모터(200)의 초기 운전 제어가 정확하게 이루어질 수 있게 되며, 상기 모터(200)의 전반적인 운전이 안정적으로 이루어질 수 있게 된다.
상기 제어 장치(100)의 구체적인 구성은, 도 3에 도시된 바와 같을 수 있다.
상기 인버터부(110)는, 도 3에 도시된 바와 같이, 상기 외부 전원(1)으로부터 직류 전원, 또는 교류 전원이 입력되는 입력부(111) 및 상기 입력부(111)에 입력된 전원을 전달받아 상기 구동 전류로 변환하는 스위칭부(112)를 포함할 수 있다.
상기 입력부(111)에 입력된 전원이 상기 직류 전원인 경우, 상기 외부 전원(10)은, 상기 직류 전원이 저장되는 배터리, 또는 상기 직류 전원을 공급하는 전원 공급 수단일 수 있다.
상기 입력부(111)에 입력된 전원이 상기 교류 전원인 경우, 상기 외부 전원(10)은, 직류 전원을 상기 교류 전원으로 변환하는 전력 변환 수단, 또는 상기 교류 전원을 공급하는 전원 공급 수단일 수 있다.
상기 입력부(111)는, 상기 입력된 전원을 평활화하는 평활 커패시터를 포함할 수 있다.
상기 평활 커패시터는, 상기 입력된 전원의 리플을 감소시켜 직류 전원의 형태로 평활화하는 직류 링크 커패시터일 수 있다.
상기 입력부(111)에 입력된 전원이 상기 교류 전원인 경우, 상기 입력부(111)는, 상기 외부 전원(10)으로부터 입력된 상기 교류 전원을 직류 전원으로 정류하는 정류부(미도시)를 더 포함할 수 있다.
상기 입력부(111)는, 상기 스위칭부(1120)와 연결되어, 상기 평활 커패시터를 통해 평활화한 직류 전원을 상기 스위칭부(112)에 전달할 수 있다.
상기 스위칭부(112)는, 상기 모터(200)와 연결되어, 상기 입력부(111)를 통해 전달받은 직류 전원을 상기 구동 전원으로 변환하여 상기 모터(200)에 출력할 수 있다.
여기서, 상기 구동 전원은 3상 교류 전원의 형태일 수 있다.
상기 스위칭부(112)는, 스위칭 동작을 통해 상기 직류 전원을 상기 교류 전원의 형태인 상기 구동 전류로 변환하여 상기 모터(200)에 출력할 수 있다.
상기 스위칭부(112)는, 상기 직류 전원을 3상의 교류 전원으로 변환하는 복수의 스위칭 모듈을 포함할 수 있다.
상기 복수의 스위칭 모듈은, 바람직하게는 절연 게이트 양극성 트랜지스터(IGBT: Insulated Gate Bipolar Transistor) 모듈일 수 있다.
상기 복수의 스위칭 모듈은, 상기 제어부(120)에 의해 스위칭 동작이 제어될 수 있다.
즉, 상기 스위칭부(112)는, 상기 제어부(120)에 의해 제어될 수 있다.
상기 복수의 스위칭 모듈은, 상기 제어부(120)로부터 상기 스위칭 동작에 대한 제어 신호를 인가받아, 상기 제어 신호에 따라 스위칭 동작하여 상기 직류 전원을 상기 교류 전원으로 변환할 수 있다.
상기 스위칭부(112)는, 상기 제어부(120)에 의해 상기 스위칭 동작이 제어되어, 상기 모터(200)의 운전을 제어할 수 있다.
상기 스위칭부(112)는, 상기 스위칭 동작의 제어를 통해, 상기 모터(200)로 출력되어 상기 모터(200)에 인가되는 상기 구동 전류를 제어하여 상기 모터(200)의 운전 속도를 제어할 수 있다.
여기서, 상기 운전 속도는, 상기 모터(200)가 회전하는 속도를 의미할 수 있다.
상기 운전 속도는 또한, 상기 운전 속도와 연관된 상기 모터(200)가 운전하는 운전 주파수 또는 상기 모터(200)의 회전수로 대체될 수 있다.
이하에서는 설명의 편의를 위해 상기 운전 속도를 중점으로 실시 예를 설명하지만, 본 발명의 실시는 상기 운전 속도를 상기 운전 주파수 또는 상기 회전수로 대체하는 형태로도 실시될 수 있다.
상기 스위칭부(112)의 스위칭 동작을 제어하여 상기 모터(200)의 운전을 제어하는 상기 제어부(120)는, 상기 모터(200)의 전압 및 전류를 검출하고, 검출한 모터 전압 및 모터 전류를 근거로 상기 모터(200)의 운전 속도를 측정하여, 측정한 상기 운전 속도에 따라 상기 스위칭 동작을 제어할 수 있다.
상기 제어부(120)는, 상기 스위칭 동작에 따라 상기 모터(200)에 인가되는 모터 전압 및 모터 전류를 검출하여, 상기 모터 전압 및 상기 모터 전류를 근거로 상기 운전 속도를 측정할 수 있다.
상기 제어부(120)는, 상기 운전 속도에 따라 상기 스위칭 동작을 제어하기 위한 제어 신호를 생성하고, 상기 제어 신호를 상기 스위칭부(112)에 인가하여 상기 스위칭 동작을 제어할 수 있다.
상기 제어부(120)는, 상기 운전 속도에 따라 상기 모터 전압에 대한 지령 전압, 상기 모터 전류에 대한 지령 전류, 상기 운전 속도에 대한 속도 지령 및 상기 스위칭 주파수에 대한 주파수 지령 중 하나 이상을 판단하여, 판단 결과에 따라 상기 제어 신호를 생성할 수 있다.
즉, 상기 제어부(120)는, 상기 모터 전압 및 상기 모터 전류를 검출한 상기 검출 결과 및 상기 운전 속도를 측정한 상기 측정 결과 중 하나 이상을 근거로 상기 지령 전압, 상기 지령 전류, 상기 속도 지령 및 상기 주파수 지령 중 하나 이상을 판단하고, 상기 판단 결과에 따라 상기 제어 신호를 생성하여 상기 스위칭 동작을 제어함으로써, 상기 모터 전압, 상기 모터 전류, 상기 운전 속도 및 상기 스위칭 주파수 중 하나 이상을 제어하게 될 수 있다.
이와 같이 상기 제어부(120)가 상기 스위칭 동작의 제어를 통해 상기 모터 전압, 상기 모터 전류, 상기 운전 속도 및 상기 스위칭 주파수 중 하나 이상을 제어하게 됨으로써, 상기 모터(200)의 운전을 제어하게 될 수 있다.
상기 스위칭 동작을 제어하는 상기 제어부(120)의 구체적인 구성은, 도 4에 도시된 바와 같을 수 있다.
상기 제어부(120)는, 도 4에 도시된 바와 같이, 상기 지령 속도(ωm)에 따라 지령 전류를 생성하는 속도 제어기(121), 상기 지령 전류(iq*)에 따라 상기 지령 전압을 생성하는 전류 제어기(122), 상기 지령 전압(Vd* 및 Vq*)을 α- β/U-V-W 변환하고, 이에 따라 상기 인버터부(110)의 상기 스위칭 동작을 제어하기 위한 PWM 제어 신호를 생성하는 신호 생성부(123), 상기 인버터부(110)에서 상기 모터(200)로 인가되는 상기 모터 전류를 검출하는 전류 검출부(124), 측정한 전류를 U-V-W/d-q 변환하여 상기 전류 제어기(122)에 피드백하는 축 변환부(125), 축 변환한 결과를 근거로 상기 모터(200)의 위치를 검출하고, 이를 근거로 상기 운전 속도를 측정하여, 상기 속도 제어기(121)에 측정 속도(^ω)를 전달하고, 자속 제어부(128)에 관측 자속(^λαβ)을 전달하고, 상기 축 변환부(125)에 위치 검출 결과(θr)를 전달하는 위치 검출부(126)(센서리스 제어부), 상기 축 변환한 결과 및 상기 측정 속도를 근거로 상기 스위칭 동작에 대한 스위칭 주파수 지령을 생성하여, 상기 신호 생성부(123)에 전달하는 스위칭 주파수 가변기(127) 및 상기 관측 자속(^λαβ)을 근거로 상기 전류 제어기(122)에 자속을 제어하기 위한 지령 전류(id*)를 생성하여 상기 전류 제어기(122)에 전달하는 상기 자속 제어부(128)를 포함할 수 있다.
상기 제어부(120)는, 상기와 같은 제어기 구성을 포함하여, 상기 운전 속도에 따라 상기 제어 신호를 생성하고, 상기 제어 신호를 상기 인버터부(110)에 인가하여 상기 인버터부(110)의 상기 스위칭 동작을 제어하게 될 수 있다.
이와 같이 상기 운전 속도에 따라 상기 스위칭 동작을 제어하는 상기 제어부(120)는, 상기 모터(200)의 운전을 시작하기 전, 상기 고정자에 시간에 따라 크기가 변하는 형태의 상기 제1 파형 전류 및 상기 제2 파형 전류가 인가되도록 상기 스위칭 동작을 제어하여 상기 회전자의 위치를 정렬시킴으로써, 상기 회전자의 위치를 검출하여 상기 모터(200)의 운전을 제어하게 될 수 있다.
즉, 상기 제어부(120)는, 상기 모터(200)가 운전을 시작하는 초기 운전을 제어하는 경우, 상기 인버터부(110)를 통해 상기 제1 파형 전류 및 상기 제2 파형 전류가 인가되도록 제어하여 상기 회전자의 위치를 정렬시킨 후, 상기 모터(200)의 초기 운전을 제어하게 될 수 있다.
상기 제1 파형 전류 및 상기 제2 파형 전류는, 상기 회전자의 위치를 정렬시키기 위한 전류일 수 있다.
상기 제1 파형 전류 및 상기 제2 파형 전류는, 상기 모터(200)의 운전 시작 시, 상기 고정자에 인가되어 상기 회전자의 위치를 정렬시키는 전류일 수 있다.
상기 제1 파형 전류 및 상기 제2 파형 전류는, 시간에 따라 크기가 변하는 형태의 전류일 수 있다.
즉, 상기 제1 파형 전류 및 상기 제2 파형 전류는, 시간에 따라 크기가 변하는 파형의 전류일 수 있다.
이에 따라, 상기 제어부(120)는, 상기 인버터부(110)가 상기 고정자에 상기 회전자의 위치를 정렬시키기 위한 전류를 시간에 따라 크기가 변하는 형태로 인가하도록 상기 인버터부(110)의 스위칭 동작을 제어하게 되고, 상기 인버터부(110)는, 상기 제어부(120)의 제어에 따라 스위칭 동작하여 상기 고정자에 상기 회전자의 위치를 정렬시키기 위한 전류를 시간에 따라 크기가 변하는 형태로 인가하게 될 수 있다.
상기 형태는, 상기 제1 파형 전류 및 상기 제2 파형 전류가 인가되는 파형의 형태일 수 있다.
상기 형태는, 상기 제1 파형 전류 및 상기 제2 파형 전류의 기설정된 파형 형태일 수 있다.
상기 형태는, 도 5에 도시된 바와 같은 사인파 형태일 수 있다.
즉, 상기 제1 파형 전류 및 상기 제2 파형 전류는, 시간에 따라 크기가 변하는 사인파의 형태로 상기 고정자에 인가될 수 있다.
이에 따라, 상기 고정자에는, 사인파형의 상기 제1 파형 전류 및 상기 제2 파형 전류가 인가될 수 있다.
상기 형태는 또한, 상기 사인파가 반파 정류된 형태일 수 있다.
즉, 상기 제1 파형 전류 및 상기 제2 파형 전류는, 시간에 따라 크기가 변하는 상기 사인파가 반파 정류되어 양(+)의 크기를 가지는 형태로 상기 고정자에 인가될 수 있다.
상기 형태는 또한, 복수의 주기를 가지는 펄스 형태일 수 있다.
즉, 상기 제1 파형 전류 및 상기 제2 파형 전류는, 시간에 따라 크기가 변하는 상기 사인파가 반파 정류되어 복수의 펄스 형태로 상기 고정자에 인가될 수 있다.
상기 형태는, 상기 펄스 간에 기설정된 간격(y)을 가지는 형태일 수 있다.
즉, 상기 제1 파형 전류 및 상기 제2 파형 전류는, 시간에 따라 크기가 변하는 상기 사인파가 반파 정류되어, 기설정된 간격(y)의 복수의 펄스 형태로 상기 고정자에 인가될 수 있다.
여기서, 상기 간격(y)은, 시간 단위의 간격일 수 있고, 전기각, 또는 위상 단위의 간격일 수도 있다.
상기 간격은, 바람직하게는 60도 간격으로 설정될 수 있다.
상기 형태는, 톱니 형태일 수 있다.
즉, 상기 제1 파형 전류 및 상기 제2 파형 전류는, 톱니 파형의 형태로 상기 고정자에 인가될 수 있다.
상기 형태는 또한, 삼각파의 형태일 수도 있다.
이와 같이 시간에 따라 크기가 변하는 형태의 상기 제1 파형 전류 및 상기 제2 파형 전류는, 상기 모터(200)의 자속축에 대한 d축 전류일 수 있다.
즉, 상기 제어부(120)는, 상기 모터(200)의 자속을 제어하기 위한 상기 d축 전류를 제어하여 상기 제1 파형 전류 및 상기 제2 파형 전류가 인가되도록 상기 인버터부(110)를 제어하게 되고, 이에 따라, 상기 제1 파형 전류 및 상기 제2 파형 전류가 상기 d축 전류로 상기 고정자에 인가될 수 있게 된다.
상기 제1 파형 전류 및 상기 제2 파형 전류는, 기설정된 인가 시간(T) 동안 상기 고정자에 인가될 수 있다.
즉, 상기 제어부(120)는, 상기 모터(200)의 운전을 시작하는 경우, 상기 제1 파형 전류 및 상기 제2 파형 전류가 상기 인가 시간(T) 동안 상기 고정자에 인가되도록 상기 인버터부(110)를 제어하고, 상기 인버터부(110)는, 상기 제어부(120)의 제어에 따라 상기 인가 시간(T) 동안 상기 제1 파형 전류 및 상기 제2 파형 전류를 상기 고정자에 인가하게 될 수 있다.
상기 인가 시간은, 상기 회전자의 위치를 정렬하기 위한 시간일 수 있다.
상기 인가 시간은, 상기 제1 파형 전류 및 상기 제2 파형 전류가 인가되어 상기 회전자의 위치가 정렬되는 시간일 수 있다.
상기 인가 시간은, 바람직하게는 3초 이내로 설정될 수 있다.
상기 제1 파형 전류 및 상기 제2 파형 전류는, 상기 인가 시간 동안 상기 제1 파형 전류가 인가된 후, 상기 제2 파형 전류가 인가될 수 있다.
상기 제1 파형 전류 및 상기 제2 파형 전류는, 기설정된 제1 인가 시간(T1) 동안 상기 제1 파형 전류가 인가된 후, 기설정된 제2 인가 시간(T2) 동안 상기 제2 파형 전류가 인가될 수 있다.
상기 제1 인가 시간(T1) 및 상기 제2 인가 시간(T2)은, 상기 제1 파형 전류 및 상기 제2 파형 전류 각각에 대한 인가 시간을 의미할 수 있다.
즉, 상기 제1 파형 전류는, 상기 제1 인가 시간(T1) 동안 인가되고, 상기 제2 파형 전류는, 상기 제1 인가 시간(T1)이 경과된 후, 상기 제2 인가 시간(T2) 동안 인가될 수 있다.
상기 제2 파형 전류는, 상기 제1 파형 전류의 크기보다 클 수 있다.
즉, 상기 제1 파형 전류 및 상기 제2 파형 전류는, 일정 비율의 서로 다른 크기로 상기 고정자에 인가될 수 있다.
이를테면, 상기 제1 파형 전류의 크기가 x[A]인 경우, 상기 제2 파형 전류는 ax[A]의 크기일 수 있다.
상기 제1 파형 전류 및 상기 제2 파형 전류는, 기설정된 인가 기준에 따른 전류일 수 있다.
즉, 상기 제어부(120)는, 상기 제1 파형 전류 및 상기 제2 파형 전류가 상기 인가 기준에 따라 상기 고정자에 인가되도록 상기 인버터부(110)의 스위칭 동작을 제어하게 되고, 이에 따라 상기 인버터부(110)는, 상기 제1 파형 전류 및 상기 제2 파형 전류를 상기 인가 기준에 따라 상기 고정자에 인가하게 될 수 있다.
상기 인가 기준은, 상기 모터(200)가 회전하지 않는 주파수에 대한 기준 및 상기 고정자의 공극을 포화시키는 크기에 대한 기준 중 하나 이상을 포함할 수 있다.
즉, 상기 제1 파형 전류 및 상기 제2 파형 전류는, 시간에 따라 크기가 변하는 형태이되, 상기 모터(200)가 회전하지 않는 주파수 및 상기 고정자의 공극을 포화시키는 크기로 인가될 수 있다.
이에 따라, 상기 모터(200)는, 상기 제1 파형 전류 및 상기 제2 파형 전류가 상기 고정자에 인가됐을 시, 상기 회전자의 회전 정지가 유지되면서 상기 고정자의 공극이 포화되는 상태로 상기 회전자가 정렬하게 될 수 있다.
이와 같이 상기 고정자에 상기 제1 파형 전류 및 상기 제2 파형 전류를 인가하여 상기 회전자의 위치를 정렬시킨 결과는, 도 6에 도시된 바와 같을 수 있다.
도 6에 도시된 바와 같이, 상기 d축 전류에 상기 제1 파형 전류 및 상기 제2 파형 전류를 인가한 경우, 시간에 따라 크기가 변하는 상기 제1 파형 전류 및 상기 제2 파형 전류에 따라 상기 d축 전압이 상기 제1 파형 전류 및 상기 제2 파형 전류의 형태로 변하게 되어, 이를 근거로 상기 제1 파형 전류 및 상기 제2 파형 전류를 인가하는 동안 상기 회전자의 위치를 추정하게 되고, 상기 제1 파형 전류 및 상기 제2 파형 전류를 인가한 후, 상기 회전자의 추정 위치가 상기 회전자의 실제 위치와 일치하게 되어, 상기 회전자의 위치 정렬이 이루어지게 될 수 있다.
이와 같이 상기 고정자에 상기 제1 파형 전류 및 상기 제2 파형 전류가 인가되도록 상기 스위칭 동작을 제어하여 상기 회전자의 위치를 정렬시키는 상기 제어부(120)는, 상기 제1 파형 전류 및 상기 제2 파형 전류 각각을 인가한 결과에 따른 상기 모터(200)의 모터 전압을 근거로 상기 고정자의 고정자 저항을 검출할 수 있다.
즉, 상기 제어부(120)는, 상기 제1 파형 전류 및 상기 제2 파형 전류 각각을 인가한 결과에 따른 상기 모터 전압을 연산하고, 연산 결과를 근거로 상기 고정자 저항을 검출하게 될 수 있다.
상기 고정자 저항는, 하기 [수학식]을 통해 연산되어 검출될 수 있다.
[수학식]


즉, 상기 제어부(120)는, 상기 제1 파형 전류 및 상기 제2 파형 전류를 인가한 결과에 따른 상기 모터 전압, 상기 모터 전류 및 상기 모터(200)의 인덕턴스를 근거로, 상기 [수학식]을 통해 상기 고정자 저항값을 연산하여 상기 고정자 저항을 검출하게 될 수 있다.
이처럼 상기 제어 장치(100)는, 상기 모터(200)의 운전을 시작하기 전, 상기 고정자에 상기 제1 파형 전류 및 상기 제2 파형 전류를 인가하여 상기 회전자의 위치를 정렬시키고, 상기 제1 파형 전류 및 상기 제2 파형 전류 각각을 인가한 결과에 따라 상기 고정자 저항을 검출하게 됨으로써, 상기 회전자의 위치 및 상기 고정자 저항을 정확하게 검출하게 되어, 상기 모터(200)의 운전 제어가 안정적이고 정확하게 이루어질 수 있게 된다.
이하, 본 발명에 따른 모터 제어 시스템(이하, 시스템이라 칭한다)을 설명하되, 앞서 상기 제어 장치(100)에서 설명한 내용과 중복되는 부분은 가급적 생략한다.
상기 시스템(1000)은, 도 2에 도시된 바와 같이, 상기 모터(200) 및 스위칭 동작을 통해 상기 외부 전원(10)으로부터 입력된 입력 전류를 상기 모터(200)를 구동하기 위한 구동 전류로 변환하여 상기 모터(200)에 출력하는 상기 인버터부(110)를 포함하여, 상기 인버터부(110)의 스위칭 동작을 통해 상기 모터(200)의 운전을 제어하는 상기 제어 장치(100)를 포함하는 모터 제어 시스템을 의미한다.
상기 시스템(1000)은, 상기 모터(200) 및 상기 제어 장치(100)를 포함하여, 상기 모터(200)의 구동을 제어하는 시스템일 수 있다.
상기 시스템(1000)은, 상기 모터(200)에 구동 전류를 공급하여, 상기 모터(200)의 구동을 제어하는 시스템으로, 상기 모터(200), 또는 상기 모터(200)를 제어하기 위한 시스템에 적용될 수 있다.
상기 시스템(1000)은, 상기 모터(200) 및 상기 제어 장치(100)를 포함하는 가전 기기에 적용되는 제어 시스템일 수 있다.
이를테면, 상기 모터(200) 및 상기 제어 장치(100)를 포함하는 세탁기, 냉장고, 청소기, 공기조화기, 정수기, 또는 건조기 등에 적용될 수 있다.
상기 시스템(1000)은, 인버터 방식으로 상기 모터(200)를 제어하는 시스템일 수 있다.
상기 시스템(1000)은, 상기 인버터의 스위칭 동작을 제어하여, 상기 모터(200)에 인가되는 상기 구동 전원을 제어함으로써, 상기 모터(200)의 운전을 제어할 수 있다.
상기 시스템(1000)은, 상기 스위칭 동작의 제어를 통해 상기 구동 전류를 제어하여, 상기 모터(200)의 운전을 제어할 수 있다.
상기 시스템(1000)은, 앞서 설명한 상기 제어 장치(100)를 포함하여 상기 모터(200) 구동을 제어할 수 있다.
상기 시스템(1000)은, 상기 모터(200)의 초기 운전, 즉 상기 모터(200)의 운전 시작을 제어하는 시스템일 수 있다.
상기 시스템(1000)에서 상기 제어 장치(100)는, 상기 모터(200)가 운전을 시작하는 경우, 상기 모터(200)의 고정자에 시간에 따라 크기가 변하는 형태의 상기 제1 파형 전류 및 상기 제2 파형 전류를 인가하여 상기 모터(200)의 회전자의 위치를 정렬시킨다.
즉, 상기 시스템(1000)은, 상기 모터(200)의 운전을 시작하기 전, 상기 제어 장치(100)가 상기 고정자에 상기 제1 파형 전류 및 상기 제2 파형 전류를 인가하여 상기 모터(200)의 회전자의 위치를 정렬시킨 후, 상기 모터(200)의 초기 운전을 제어하게 될 수 있다.
상기 시스템(1000)에서 상기 제어 장치(100)는, 상기 인버터부(110) 및 상기 모터(200)에 흐르는 모터 전류를 검출하여, 검출 결과를 근거로 상기 인버터부(110)의 스위칭 동작을 제어하여 상기 모터(200)의 운전을 제어하는 상기 제어부(120)를 포함할 수 있다.
상기 시스템(1000)에서 상기 제어 장치(100)는, 상기 고정자에 상기 회전자의 위치를 정렬시키기 위한 상기 제1 파형 전류 및 상기 제2 파형 전류를 시간에 따라 크기가 변하는 형태로 인가할 수 있다.
상기 제1 파형 전류 및 상기 제2 파형 전류는, 도 5에 도시된 바와 같은 사인파 형태일 수 있다.
상기 제1 파형 전류 및 상기 제2 파형 전류는 또한, 상기 사인파가 반파 정류된 형태일 수 있다.
상기 제1 파형 전류 및 상기 제2 파형 전류는 또한, 복수의 주기를 가지는 펄스 형태일 수 있다.
상기 제1 파형 전류 및 상기 제2 파형 전류는, 상기 펄스 간에 기설정된 간격(y)을 가지는 형태일 수 있다.
상기 제1 파형 전류 및 상기 제2 파형 전류는, 톱니 형태일 수 있다.
상기 시스템(1000)에서 상기 제어 장치(100)는, 상기 모터(200)의 자속축에 대한 d축 전류를 제어하여 상기 제1 파형 전류 및 상기 제2 파형 전류를 인가할 수 있다.
상기 시스템(1000)에서 상기 제어 장치(100)는, 기설정된 인가 시간(T) 동안 상기 제1 파형 전류 및 상기 제2 파형 전류를 상기 고정자에 인가할 수 있다.
상기 시스템(1000)에서 상기 제어 장치(100)는, 상기 고정자에 기설정된 제1 인가 시간(T1) 동안 상기 제1 파형 전류를 인가한 후, 기설정된 제2 인가 시간(T2) 동안 상기 제2 파형 전류를 인가할 수 있다.
상기 시스템(1000)에서 상기 제어 장치(100)는, 상기 제1 파형 전류 및 상기 제2 파형 전류를 상기 모터(200)가 회전하지 않는 주파수로 상기 고정자에 인가할 수 있다.
이에 따라, 상기 모터(200)는, 상기 제1 파형 전류 및 상기 제2 파형 전류가 인가되는 동안 회전하지 않으면서 위치가 정렬될 수 있다.
상기 시스템(1000)에서 상기 제어 장치(100)는, 상기 제1 파형 전류 및 상기 제2 파형 전류를 상기 고정자의 공극을 포화시키는 크기로 상기 고정자에 인가할 수 있다.
이에 따라, 상기 모터(200)는, 상기 제1 파형 전류 및 상기 제2 파형 전류가 인가되는 동안 상기 고정자의 공극이 포화되면서 위치가 정렬될 수 있다.
상기 시스템(1000)에서 상기 제어 장치(100)는, 상기 제2 파형 전류를 상기 제1 파형 전류의 크기보다 큰 크기로 상기 고정자에 인가할 수 있다.
이를테면, 상기 제1 파형 전류가 x[A]의 크기로 인가되고, 상기 제2 파형 전류가 ax[A]의 크기로 인가될 수 있다.
상기 시스템(1000)에서 상기 제어 장치(100)는, 상기 제1 파형 전류 및 상기 제2 파형 전류 각각을 인가한 결과를 근거로 상기 고정자의 고정자 저항을 검출할 수 있다.
이를테면, 상기 [수학식]에 따라 상기 고정자 저항값을 연산하여 상기 고정자 저항을 검출하게 될 수 있다.
이처럼 상기 시스템(1000)은, 상기 모터(200)의 운전을 시작하기 전, 상기 고정자에 상기 제1 파형 전류 및 상기 제2 파형 전류를 인가하여 상기 회전자의 위치를 정렬시키고, 상기 제1 파형 전류 및 상기 제2 파형 전류 각각을 인가한 결과에 따라 상기 고정자 저항을 검출하게 됨으로써, 상기 회전자의 위치 및 상기 고정자 저항을 정확하게 검출하게 되어, 상기 모터(200)의 운전 제어가 안정적이고 정확하게 이루어질 수 있게 된다.
이하, 본 발명에 따른 모터 제어 방법(이하, 제어 방법이라 칭한다)을 설명하되, 앞서 상기 제어 장치(100) 및 상기 시스템(1000)에서 설명한 내용과 중복되는 부분은 가급적 생략한다.
상기 제어 방법은, 도 2에 도시된 바와 같이, 스위칭 동작을 통해 상기 외부 전원(10)으로부터 입력된 입력 전류를 상기 모터(200)를 구동하기 위한 구동 전류로 변환하여 상기 모터(200)에 출력하는 상기 인버터부(110) 및 상기 모터(200)에 흐르는 모터 전류를 검출하여, 검출 결과를 근거로 상기 인버터부(110)의 스위칭 동작을 제어하여 상기 모터(200)의 운전을 제어하는 상기 제어부(120)를 포함하는 모터 제어 장치(100)의 모터 제어 방법을 의미한다.
즉, 상기 제어 방법은, 앞서 설명한 상기 제어 장치(100)의 상기 모터(200)를 제어하는 방법일 수 있다.
상기 제어 방법은 또한, 앞서 설명한 상기 제어 장치(100)를 포함하는 상기 시스템(1000)의 제어 방법일 수도 있다.
상기 제어 방법은, 상기 제어 장치(100) 또는 상기 시스템(1000)에서, 상기 모터(200)의 고정자 저항을 검출하는 방법, 또는 상기 모터(200)의 운전 시작을 제어하는 방법일 수 있다.
상기 제어 방법은, 도 7에 도시된 바와 같이, 상기 모터(200)의 고정자에 시간에 따라 크기가 변하는 형태의 제1 파형 전류를 인가하는 단계(S10), 상기 고정자에 시간에 따라 크기가 변하는 형태의 제2 파형 전류를 인가하는 단계(S20) 및 상기 제1 파형 전류 및 상기 제2 파형 전류 각각을 인가한 결과를 근거로 상기 고정자의 고정자 저항을 검출하는 단계(S30)를 포함한다.
즉, 상기 제어 장치(100)는, 상기 제1 파형 전류를 인가(S10)하고, 상기 제2 파형 전류를 인가(S20)하여, 상기 제1 파형 전류 및 상기 제2 파형 전류 각각을 인가한 결과를 근거로 상기 고정자 저항을 검출(S30)하여 상기 모터(200)의 위치를 정렬시키고, 상기 제어 방법은, 상기와 같은 순서로 상기 모터(200)의 위치를 정렬시키게 될 수 있다.
상기 제1 파형 전류를 인가하는 단계(S10)는, 상기 모터(200)의 운전을 시작하는 경우, 상기 인버터부(110)가 상기 제어부(120)의 제어에 의해 상기 제1 파형 전류를 상기 고정자에 인가하는 단계일 수 있다.
상기 제1 파형 전류를 인가하는 단계(S10)는, 상기 모터(200)의 자속축에 해당하는 d축 전류를 제어하여 상기 제1 파형 전류를 상기 고정자에 인가할 수 있다.
상기 제1 파형 전류를 인가하는 단계(S10)는, 상기 제1 파형 전류를 시간에 따라 크기가 변하는 형태로 상기 고정자에 인가할 수 있다.
상기 제1 파형 전류를 인가하는 단계(S10)는, 상기 제1 파형 전류를 사인파 형태로 상기 고정자에 인가할 수 있다.
상기 제1 파형 전류를 인가하는 단계(S10)는, 상기 제1 파형 전류를 상기 사인파가 반파 정류된 형태로 상기 고정자에 인가할 수 있다.
상기 제1 파형 전류를 인가하는 단계(S10)는, 상기 제1 파형 전류를 복수의 주기를 가지는 펄스 형태로 상기 고정자에 인가할 수 있다.
상기 제1 파형 전류를 인가하는 단계(S10)는, 상기 제1 파형 전류를 상기 펄스 간에 기설정된 간격(y)을 가지는 형태로 상기 고정자에 인가할 수 있다.
상기 제1 파형 전류를 인가하는 단계(S10)는, 상기 제1 파형 전류를 톱니 형태로 상기 고정자에 인가할 수 있다.
상기 제1 파형 전류를 인가하는 단계(S10)는, 상기 제1 파형 전류를 상기 모터(200)가 회전하지 않는 주파수로 상기 고정자에 인가할 수 있다.
상기 제1 파형 전류를 인가하는 단계(S10)는, 상기 제1 파형 전류를 상기 고정자의 공극을 포화시키는 크기로 상기 고정자에 인가할 수 있다.
상기 제1 파형 전류를 인가하는 단계(S10)는, 상기 제1 파형 전류를 상기 제2 파형 전류보다 작은 크기로 상기 고정자에 인가할 수 있다.
상기 제1 파형 전류를 인가하는 단계(S10)는, 기설정된 제1 인가 시간 동안 상기 제1 파형 전류를 상기 고정자에 인가할 수 있다.
즉, 상기 제1 파형 전류를 인가하는 단계(S10)에서 상기 제어부(120)는, 상기 인버터부(110)가 상기 제1 인가 시간 동안 상기 제1 파형 전류를 상기 고정자에 인가하도록 상기 인버터부(110)를 제어하고, 상기 인버터부(110)는, 상기 제어부(120)의 제어에 따라 상기 제1 인가 시간 동안 상기 제1 파형 전류를 상기 고정자에 인가하게 될 수 있다.
상기 제2 파형 전류를 인가하는 단계(S20)는, 상기 제1 파형 전류를 인가하는 단계(S10)에서 상기 제1 파형 전류를 인가한 후, 상기 인버터부(110)가 상기 제어부(120)의 제어에 의해 상기 제2 파형 전류를 상기 고정자에 인가하는 단계일 수 있다.
상기 제2 파형 전류를 인가하는 단계(S20)는, 상기 모터(200)의 자속축에 해당하는 d축 전류를 제어하여 상기 제2 파형 전류를 상기 고정자에 인가할 수 있다.
상기 제2 파형 전류를 인가하는 단계(S20)는, 상기 제2 파형 전류를 시간에 따라 크기가 변하는 형태로 상기 고정자에 인가할 수 있다.
상기 제2 파형 전류를 인가하는 단계(S20)는, 상기 제2 파형 전류를 사인파 형태로 상기 고정자에 인가할 수 있다.
상기 제2 파형 전류를 인가하는 단계(S20)는, 상기 제2 파형 전류를 상기 사인파가 반파 정류된 형태로 상기 고정자에 인가할 수 있다.
상기 제2 파형 전류를 인가하는 단계(S20)는, 상기 제2 파형 전류를 복수의 주기를 가지는 펄스 형태로 상기 고정자에 인가할 수 있다.
상기 제2 파형 전류를 인가하는 단계(S20)는, 상기 제2 파형 전류를 상기 펄스 간에 기설정된 간격(y)을 가지는 형태로 상기 고정자에 인가할 수 있다.
상기 제2 파형 전류를 인가하는 단계(S20)는, 상기 제2 파형 전류를 톱니 형태로 상기 고정자에 인가할 수 있다.
상기 제2 파형 전류를 인가하는 단계(S20)는, 상기 제2 파형 전류를 상기 모터(200)가 회전하지 않는 주파수로 상기 고정자에 인가할 수 있다.
상기 제2 파형 전류를 인가하는 단계(S20)는, 상기 제2 파형 전류를 상기 고정자의 공극을 포화시키는 크기로 상기 고정자에 인가할 수 있다.
상기 제2 파형 전류를 인가하는 단계(S20)는, 상기 제2 파형 전류를 상기 제1 파형 전류보다 큰 크기로 상기 고정자에 인가할 수 있다.
상기 제2 파형 전류를 인가하는 단계(S20)는, 기설정된 제2 인가 시간 동안 상기 제2 파형 전류를 상기 고정자에 인가할 수 있다.
즉, 상기 제2 파형 전류를 인가하는 단계(S20)에서 상기 제어부(120)는, 상기 인버터부(110)가 상기 제2 인가 시간 동안 상기 제2 파형 전류를 상기 고정자에 인가하도록 상기 인버터부(110)를 제어하고, 상기 인버터부(110)는, 상기 제어부(120)의 제어에 따라 상기 제2 인가 시간 동안 상기 제2 파형 전류를 상기 고정자에 인가하게 될 수 있다.
상기 고정자 저항을 검출하는 단계(S30)는, 상기 제2 파형 전류를 인가하는 단계(S20)에서 상기 제2 파형 전류를 상기 고정자에 인가한 후, 상기 제어부(120)가 상기 제1 파형 전류 및 상기 제2 파형 전류 각각을 인가한 결과를 근거로 상기 고정자 저항을 검출하는 단계일 수 있다.
상기 고정자 저항을 검출하는 단계(S30)는, 상기 제1 파형 전류 및 상기 제2 파형 전류 각각을 인가한 결과에 따른 모터 전압을 연산하여, 연산 결과를 근거로 상기 고정자 저항을 검출할 수 있다.
상기 고정자 저항을 검출하는 단계(S30)는, 상기 [수학식]에 따라 상기 고정자 저항값을 연산하여 상기 고정자 저항을 검출할 수 있다.
이처럼 상기 제어 방법은, 상기 제1 파형 전류를 인가(S10)하고, 상기 제2 파형 전류를 인가(S20)하여, 상기 제1 파형 전류 및 상기 제2 파형 전류 각각을 인가한 결과를 근거로 상기 고정자 저항을 검출(S30)하여 상기 모터(200)의 위치를 정렬시킴으로써, 상기 회전자의 위치 및 상기 고정자 저항을 정확하게 검출하게 되어 상기 모터(200)의 운전 제어가 안정적이고 정확하게 이루어질 수 있게 된다.
상기 제1 파형 전류를 인가하는 단계(S10), 상기 제2 파형 전류를 인가하는 단계(S20) 및 상기 고정자 저항을 검출하는 단계(S30)를 포함하는 상기 제어 방법은, 프로그램이 기록된 매체에 컴퓨터가 읽을 수 있는 코드로서 구현하는 것이 가능하다. 컴퓨터가 읽을 수 있는 매체는, 컴퓨터 시스템에 의하여 읽혀질 수 있는 데이터가 저장되는 모든 종류의 기록장치를 포함한다. 컴퓨터가 읽을 수 있는 매체의 예로는, HDD(Hard Disk Drive), SSD(Solid State Disk), SDD(Silicon Disk Drive), ROM, RAM, CD-ROM, 자기 테이프, 플로피 디스크, 광 데이터 저장 장치 등이 있으며, 또한 캐리어 웨이브(예를 들어, 인터넷을 통한 전송)의 형태로 구현되는 것도 포함한다. 또한, 상기 컴퓨터는 상기 제어부(120)를 포함할 수도 있다.
상술한 바와 같은 본 발명에 따른 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법의 실시 예들은, 모터에 구비되는 모터 제어 장치, 이를테면 모터를 제어하는 인버터 장치, 이를 포함하는 모터, 또는 이러한 모터의 제어 방법 등에 적용되어 실시될 수 있다. 특히, 모터의 초기 운전을 제어하는 제어 장치, 제어 시스템 및 제어 방법, 모터의 위치를 정렬시키는 제어 장치, 제어 시스템 및 제어 방법, 모터의 위치를 검출하는 제어 장치, 제어 시스템 및 제어 방법 등에 유용하게 적용되어 실시될 수 있다. 또한, 모터를 포함하는 압축기에 구비되는 압축기 제어 장치, 이를테면 압축기의 모터를 제어하는 인버터 장치, 이를 포함하는 압축기, 또는 이러한 압축기의 제어 방법 등에도 적용되어 실시될 수 있다. 그러나 본 명세서에 개시된 기술은 이에 한정되지 않고, 상기 기술의 기술적 사상이 적용될 수 있는 모든 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법, 상기 모터를 포함하는 가전 기기, 상기 모터를 포함하는 가전 기기의 제어 장치, 상기 모터를 포함하는 가전 기기의 제어 시스템 및 제어 방법에도 적용되어 실시될 수 있다.
지금까지 본 발명에 따른 구체적인 실시 예에 관하여 설명하였으나, 본 발명의 범위에서 벗어나지 않는 한도 내에서는 여러 가지 변형이 가능함은 물론이다. 그러므로, 본 발명의 범위는 설명된 실시 예에 국한되어 정해져서는 안 되며, 후술하는 특허 청구의 범위뿐 아니라 이 특허 청구의 범위와 균등한 것들에 의해 정해져야 한다.
이상과 같이 본 발명은 비록 한정된 실시 예와 도면에 의해 설명되었으나, 본 발명은 상기의 실시 예에 한정되는 것은 아니며, 이는 본 발명이 속하는 분야에서 통상의 지식을 가진 자라면 이러한 기재로부터 다양한 수정 및 변형이 가능하다. 따라서, 본 발명 사상은 아래에 기재된 특허청구범위에 의해서만 파악되어야 하고, 이의 균등 또는 등가적 변형 모두는 본 발명 사상의 범주에 속한다고 할 것이다.
10: 외부 전원
100: 모터 제어 장치
110: 인버터부 120: 제어부
200: 모터
110: 인버터부 120: 제어부
200: 모터
Claims (20)
- 모터의 운전을 제어하는 모터 제어 장치에 있어서,
스위칭 동작을 통해 외부 전원으로부터 입력된 입력 전류를 상기 모터를 구동하기 위한 구동 전류로 변환하여 상기 모터에 출력하는 인버터부; 및
상기 모터에 흐르는 모터 전류를 검출하여, 검출 결과를 근거로 상기 인버터부의 스위칭 동작을 제어하여 상기 모터의 운전을 제어하는 제어부;를 포함하고,
상기 제어부는,
상기 모터의 운전을 시작하기 전,
상기 모터의 고정자에 시간에 따라 크기가 변하는 형태의 제1 파형 전류 및 제2 파형 전류가 인가되도록 상기 스위칭 동작을 제어하여 상기 모터의 회전자의 위치를 정렬시키는 것을 특징으로 하는 모터 제어 장치. - 제1 항에 있어서,
상기 형태는,
사인파 형태인 것을 특징으로 하는 모터 제어 장치. - 제2 항에 있어서,
상기 형태는,
상기 사인파가 반파 정류된 형태인 것을 특징으로 하는 모터 제어 장치. - 제3 항에 있어서,
상기 형태는,
복수의 주기를 가지는 펄스 형태인 것을 특징으로 하는 모터 제어 장치. - 제4 항에 있어서,
상기 형태는,
상기 펄스 간에 기설정된 간격을 가지는 형태인 것을 특징으로 하는 모터 제어 장치. - 제5 항에 있어서,
상기 형태는,
톱니 형태인 것을 특징으로 하는 모터 제어 장치. - 제1 항에 있어서,
상기 제1 파형 전류 및 상기 제2 파형 전류는,
상기 모터의 자속축에 대한 d축 전류인 것을 특징으로 하는 모터 제어 장치. - 제7 항에 있어서,
상기 제1 파형 전류 및 상기 제2 파형 전류는,
기설정된 제1 인가 시간 동안 상기 제1 파형 전류가 인가된 후, 기설정된 제2 인가 시간 동안 상기 제2 파형 전류가 인가되는 것을 특징으로 하는 모터 제어 장치. - 제8 항에 있어서,
상기 제2 파형 전류는,
상기 제1 파형 전류의 크기보다 큰 것을 특징으로 하는 모터 제어 장치. - 제7 항에 있어서,
상기 제1 파형 전류 및 상기 제2 파형 전류는,
기설정된 인가 기준에 따른 전류인 것을 특징으로 하는 모터 제어 장치. - 제10 항에 있어서,
상기 인가 기준은,
상기 모터가 회전하지 않는 주파수에 대한 기준 및 상기 고정자의 공극을 포화시키는 크기에 대한 기준 중 하나 이상을 포함하는 것을 특징으로 하는 모터 제어 장치. - 제1 항 내지 제11 항 중 어느 한 항에 있어서,
상기 제어부는,
상기 제1 파형 전류 및 상기 제2 파형 전류 각각을 인가한 결과에 따른 상기 모터의 모터 전압을 근거로 상기 고정자의 고정자 저항을 검출하는 것을 특징으로 하는 모터 제어 장치. - 모터; 및
스위칭 동작을 통해 외부 전원으로부터 입력된 입력 전류를 상기 모터를 구동하기 위한 구동 전류로 변환하여 상기 모터에 출력하는 인버터부를 포함하여, 상기 인버터부의 스위칭 동작을 통해 상기 모터의 운전을 제어하는 제어 장치;를 포함하는 모터 제어 시스템에 있어서,
상기 제어 장치는,
상기 모터가 운전을 시작하는 경우,
상기 모터의 고정자에 시간에 따라 크기가 변하는 형태의 제1 파형 전류 및 제2 파형 전류를 인가하여 상기 모터의 회전자의 위치를 정렬시키는 것을 특징으로 하는 모터 제어 시스템. - 제13 항에 있어서,
상기 제어 장치는,
상기 고정자에 기설정된 제1 인가 시간 동안 상기 제1 파형 전류를 인가한 후, 기설정된 제2 인가 시간 동안 상기 제2 파형 전류를 인가하는 것을 특징으로 하는 모터 제어 시스템. - 제13 항에 있어서,
상기 제어 장치는,
상기 제1 파형 전류 및 상기 제2 파형 전류를 상기 모터가 회전하지 않는 주파수로 상기 고정자에 인가하는 것을 특징으로 하는 모터 제어 시스템. - 제13 항에 있어서,
상기 제어 장치는,
상기 제1 파형 전류 및 상기 제2 파형 전류를 상기 고정자의 공극을 포화시키는 크기로 상기 고정자에 인가하는 것을 특징으로 하는 모터 제어 시스템. - 제13 항에 있어서,
상기 제어 장치는,
상기 제2 파형 전류를 상기 제1 파형 전류의 크기보다 큰 크기로 상기 고정자에 인가하는 것을 특징으로 하는 모터 제어 시스템. - 제13 항에 있어서,
상기 제어 장치는,
상기 제1 파형 전류 및 상기 제2 파형 전류 각각을 인가한 결과를 근거로 상기 고정자의 고정자 저항을 검출하는 것을 특징으로 하는 모터 제어 시스템. - 스위칭 동작을 통해 외부 전원으로부터 입력된 입력 전류를 상기 모터를 구동하기 위한 구동 전류로 변환하여 상기 모터에 출력하는 인버터부; 및
상기 모터에 흐르는 모터 전류를 검출하여, 검출 결과를 근거로 상기 인버터부의 스위칭 동작을 제어하여 상기 모터의 운전을 제어하는 제어부;를 포함하는 모터 제어 장치의 모터 제어 방법에 있어서,
상기 모터의 고정자에 시간에 따라 크기가 변하는 형태의 제1 파형 전류를 인가하는 단계;
상기 고정자에 시간에 따라 크기가 변하는 형태의 제2 파형 전류를 인가하는 단계; 및
상기 제1 파형 전류 및 상기 제2 파형 전류 각각을 인가한 결과를 근거로 상기 고정자의 고정자 저항을 검출하는 단계;를 포함하는 것을 특징으로 하는 모터 제어 방법. - 제19 항에 있어서,
상기 제1 파형 전류를 인가하는 단계는,
기설정된 제1 인가 시간 동안 상기 제1 파형 전류를 인가하고,
상기 제2 파형 전류를 인가하는 단계는,
기설정된 제2 인가 시간 동안 상기 제2 파형 전류를 인가하는 것을 특징으로 하는 모터 제어 방법.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190004136A KR102604003B1 (ko) | 2019-01-11 | 2019-01-11 | 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법 |
| DE102020200115.4A DE102020200115A1 (de) | 2019-01-11 | 2020-01-08 | Vorrichtung zum steuern eines motors, system zum steuern des motors und verfahren zum steuern des motors |
| US16/739,690 US11463033B2 (en) | 2019-01-11 | 2020-01-10 | Apparatus, system, and method for controlling motor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190004136A KR102604003B1 (ko) | 2019-01-11 | 2019-01-11 | 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200087604A true KR20200087604A (ko) | 2020-07-21 |
| KR102604003B1 KR102604003B1 (ko) | 2023-11-20 |
Family
ID=71131830
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020190004136A KR102604003B1 (ko) | 2019-01-11 | 2019-01-11 | 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11463033B2 (ko) |
| KR (1) | KR102604003B1 (ko) |
| DE (1) | DE102020200115A1 (ko) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210051499A (ko) * | 2019-10-30 | 2021-05-10 | 주식회사다스 | Bldc 모터 시스템 및 구동 장치 |
| DE102021214189A1 (de) | 2020-12-18 | 2022-06-23 | Lg Electronics Inc. | Vorrichtung zum Steuern eines Motors und Verfahren zum Steuern eines Motors |
| DE102021132969A1 (de) | 2020-12-18 | 2022-06-23 | Lg Electronics Inc. | Kleidungsbehandlungsvorrichtung und das Steuerverfahren dafür |
| DE102022100004A1 (de) | 2021-01-05 | 2022-07-07 | Lg Electronics Inc. | Einrichtung zum steuern eines motors und verfahren zum steuern eines motors |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014050121A (ja) * | 2012-08-29 | 2014-03-17 | Toyota Motor Corp | ロータ位置推定装置、電動機制御システムおよびロータ位置推定方法 |
| KR101663520B1 (ko) * | 2015-08-11 | 2016-10-07 | 엘지전자 주식회사 | 모터 구동장치 및 이를 구비하는 홈 어플라이언스 |
| JP2018078695A (ja) * | 2016-11-08 | 2018-05-17 | 北斗制御株式会社 | 電動機の界磁位置検出方法 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6172498B1 (en) * | 1998-09-29 | 2001-01-09 | Rockwell Technologies, Llc | Method and apparatus for rotor angle detection |
| DE502004012073D1 (de) * | 2003-11-06 | 2011-02-10 | Continental Teves Ag & Co Ohg | Verfahren zur ermittlung der rotorlage einer synchronmaschine |
| FR2933550B1 (fr) * | 2008-07-01 | 2012-10-12 | Schneider Toshiba Inverter Europe Sas | Procede de determination des inductances d'une machine synchrone a aimants permanents |
| KR101709496B1 (ko) | 2015-05-21 | 2017-02-23 | 엘지전자 주식회사 | 모터 구동장치 및 이를 구비하는 홈 어플라이언스 |
| US10742143B2 (en) * | 2018-10-17 | 2020-08-11 | Infineon Technologies Ag | Sensorless motor control |
-
2019
- 2019-01-11 KR KR1020190004136A patent/KR102604003B1/ko active IP Right Grant
-
2020
- 2020-01-08 DE DE102020200115.4A patent/DE102020200115A1/de active Pending
- 2020-01-10 US US16/739,690 patent/US11463033B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014050121A (ja) * | 2012-08-29 | 2014-03-17 | Toyota Motor Corp | ロータ位置推定装置、電動機制御システムおよびロータ位置推定方法 |
| KR101663520B1 (ko) * | 2015-08-11 | 2016-10-07 | 엘지전자 주식회사 | 모터 구동장치 및 이를 구비하는 홈 어플라이언스 |
| JP2018078695A (ja) * | 2016-11-08 | 2018-05-17 | 北斗制御株式会社 | 電動機の界磁位置検出方法 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210051499A (ko) * | 2019-10-30 | 2021-05-10 | 주식회사다스 | Bldc 모터 시스템 및 구동 장치 |
| DE102021214189A1 (de) | 2020-12-18 | 2022-06-23 | Lg Electronics Inc. | Vorrichtung zum Steuern eines Motors und Verfahren zum Steuern eines Motors |
| DE102021132969A1 (de) | 2020-12-18 | 2022-06-23 | Lg Electronics Inc. | Kleidungsbehandlungsvorrichtung und das Steuerverfahren dafür |
| US11821131B2 (en) | 2020-12-18 | 2023-11-21 | Lg Electronics Inc. | Clothes treating apparatus and the control method for the same |
| US11926951B2 (en) | 2020-12-18 | 2024-03-12 | Lg Electronics Inc. | Apparatus for controlling motor and method for controlling motor |
| DE102022100004A1 (de) | 2021-01-05 | 2022-07-07 | Lg Electronics Inc. | Einrichtung zum steuern eines motors und verfahren zum steuern eines motors |
| US11736046B2 (en) | 2021-01-05 | 2023-08-22 | Lg Electronics Inc. | Apparatus for controlling motor and method for controlling motor |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102604003B1 (ko) | 2023-11-20 |
| DE102020200115A1 (de) | 2020-07-16 |
| US20200228039A1 (en) | 2020-07-16 |
| US11463033B2 (en) | 2022-10-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106208855B (zh) | 同步电动机的温度估计装置 | |
| KR20200087604A (ko) | 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법 | |
| JP3636340B2 (ja) | 交流回転機用電力変換装置 | |
| US8519662B2 (en) | Method and apparatus for controlling motor torque | |
| JP4406552B2 (ja) | 電動機の制御装置 | |
| KR20130106505A (ko) | 센서리스 제어 방법 및 장치 | |
| US20160156294A1 (en) | Motor driving module | |
| JP2020005472A (ja) | 電動機の制御装置 | |
| JP2013141345A (ja) | モータ制御装置及び空気調和機 | |
| JP6477147B2 (ja) | 永久磁石電動機の鎖交磁束量測定方法、永久磁石電動機の鎖交磁束量測定プログラム、および永久磁石電動機の鎖交磁束量測定装置 | |
| JP5278091B2 (ja) | 誘導電動機の回転数推定装置および推定方法 | |
| JP2020014266A (ja) | 電動機の制御装置 | |
| KR20140090470A (ko) | 전동기 구동장치 | |
| JP6465236B1 (ja) | 制御装置、制御方法、制御システム、学習装置、及びモデルデータの生成方法 | |
| JP4127000B2 (ja) | モータ制御装置 | |
| JP6326927B2 (ja) | 誘導電動機の制御装置および制御方法 | |
| KR101539867B1 (ko) | 구동 신호 생성 장치, 그를 이용한 모터 구동 시스템 및 그 방법 | |
| KR101694167B1 (ko) | 동기 전동기의 위치 추정 방법 및 이를 이용한 전동기 구동장치 | |
| KR101684807B1 (ko) | 진상각 제어기 | |
| JP4312993B2 (ja) | インバータ制御方法およびその装置 | |
| US20230268864A1 (en) | A Method For Controlling A Rotary Electric Machine And A System Thereof | |
| JP2018137913A (ja) | モータ駆動装置およびこれを用いた洗濯機または洗濯乾燥機 | |
| KR20230142256A (ko) | 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법 | |
| KR20110118502A (ko) | 동기 전동기의 위치 추정 방법 및 이를 이용한 전동기 구동장치 | |
| JP2023144354A (ja) | 電動機の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant |