KR20200049189A - 가전 기기 - Google Patents
가전 기기 Download PDFInfo
- Publication number
- KR20200049189A KR20200049189A KR1020180132148A KR20180132148A KR20200049189A KR 20200049189 A KR20200049189 A KR 20200049189A KR 1020180132148 A KR1020180132148 A KR 1020180132148A KR 20180132148 A KR20180132148 A KR 20180132148A KR 20200049189 A KR20200049189 A KR 20200049189A
- Authority
- KR
- South Korea
- Prior art keywords
- noise
- collected
- robot cleaner
- home appliance
- processor
- Prior art date
Links
- 230000002159 abnormal effect Effects 0.000 claims abstract description 36
- 238000004891 communication Methods 0.000 claims abstract description 14
- 238000001514 detection method Methods 0.000 claims description 12
- 238000000034 method Methods 0.000 claims description 9
- 238000010586 diagram Methods 0.000 description 9
- 230000014509 gene expression Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000005406 washing Methods 0.000 description 2
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 238000013473 artificial intelligence Methods 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
Images



Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B13/00—Burglar, theft or intruder alarms
- G08B13/16—Actuation by interference with mechanical vibrations in air or other fluid
- G08B13/1654—Actuation by interference with mechanical vibrations in air or other fluid using passive vibration detection systems
- G08B13/1672—Actuation by interference with mechanical vibrations in air or other fluid using passive vibration detection systems using sonic detecting means, e.g. a microphone operating in the audio frequency range
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4036—Parts or details of the surface treating tools
- A47L11/4041—Roll shaped surface treating tools
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1679—Programme controls characterised by the tasks executed
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/0011—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot associated with a remote control arrangement
- G05D1/0038—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot associated with a remote control arrangement by providing the operator with simple or augmented images from one or more cameras located onboard the vehicle, e.g. tele-operation
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/0011—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot associated with a remote control arrangement
- G05D1/005—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot associated with a remote control arrangement by providing the operator with signals other than visual, e.g. acoustic, haptic
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0276—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle
- G05D1/028—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle using a RF signal
- G05D1/0282—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle using a RF signal generated in a local control room
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B13/00—Burglar, theft or intruder alarms
- G08B13/18—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength
- G08B13/189—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using passive radiation detection systems
- G08B13/194—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using passive radiation detection systems using image scanning and comparing systems
- G08B13/196—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using passive radiation detection systems using image scanning and comparing systems using television cameras
- G08B13/19602—Image analysis to detect motion of the intruder, e.g. by frame subtraction
- G08B13/19613—Recognition of a predetermined image pattern or behaviour pattern indicating theft or intrusion
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B13/00—Burglar, theft or intruder alarms
- G08B13/18—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength
- G08B13/189—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using passive radiation detection systems
- G08B13/194—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using passive radiation detection systems using image scanning and comparing systems
- G08B13/196—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using passive radiation detection systems using image scanning and comparing systems using television cameras
- G08B13/19639—Details of the system layout
- G08B13/19647—Systems specially adapted for intrusion detection in or around a vehicle
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B13/00—Burglar, theft or intruder alarms
- G08B13/18—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength
- G08B13/189—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using passive radiation detection systems
- G08B13/194—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using passive radiation detection systems using image scanning and comparing systems
- G08B13/196—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using passive radiation detection systems using image scanning and comparing systems using television cameras
- G08B13/19697—Arrangements wherein non-video detectors generate an alarm themselves
Abstract
본 발명의 일 실시 예에 따른 가전 기기는 상기 가전 기기의 외출 모드 하에서, 소음을 수집하는 마이크로폰과 로봇 청소기와 무선 통신을 수행하는 통신부 및 수집된 소음이 이상 소음인지를 판단하고, 수집된 소음이 상기 이상 소음으로 판단된 경우, 상기 통신부를 통해, 상기 로봇 청소기를 상기 가전 기기가 위치한 곳으로 이동시키기 위한 이동 명령을 상기 로봇 청소기에 전송한다.
Description
본 발명은 가전 기기에 관한 것으로, 보다 상세하게는, 인공 지능을 이용하여, 사용자의 외출 시, 이상 소음을 감지할 수 있는 가전 기기에 관한 것이다.
일반적인 무인보안 경보시스템은 가정집이나 사무실이나 공장에 관리자 즉 내부인이 아닌 침입자(사람 또는 동물)를 감지하여 경고등이나 경고알람으로 침입사실을 알려주는 것을 말한다.
이와 같은 무인보안 경보시스템은 출입구에 설치되는 도어감지장치에 의해서 출입도어의 개폐여부를 감지하여 침입사실을 알려주는 단순한 시스템이 개발된 후에 상기 단순시스템의 단점을 보안하고 시스템의 성능을 향상시킨 첨단의 비젼경 보시스템이 개발되고 있는 추세에 있다.
또한, 최근에는 댁내에 구비된 이동 가능한 로봇 청소기의 카메라를 통해 외부인의 침입(움직임)을 감지해 사진을 촬영 후, 사용자에게 촬영된 영상을 전송할 수도 있다.
그러나, 로봇 청소기는 주위만 촬영하므로, 로봇 청소기가 위치하지 않은 곳에 외부인 침입 시, 침입자를 감지할 수 없는 문제가 있었다.
본 발명은 전술한 문제 및 다른 문제를 해결하는 것을 목적으로 한다.
본 발명은 사용자의 외출 시, 댁내의 가전 기기에 구비된 마이크로폰에 입력된 주변 소음을 이용하여, 침입자를 감지할 수 있는 가전 기기의 제공을 그 목적으로 한다.
본 발명의 일 실시 예에 따른 가전 기기는 상기 가전 기기의 외출 모드 하에서, 소음을 수집하는 마이크로폰과 로봇 청소기와 무선 통신을 수행하는 통신부 및 수집된 소음이 이상 소음인지를 판단하고, 수집된 소음이 상기 이상 소음으로 판단된 경우, 상기 통신부를 통해, 상기 로봇 청소기를 상기 가전 기기가 위치한 곳으로 이동시키기 위한 이동 명령을 상기 로봇 청소기에 전송한다.
본 발명의 일 실시 예에 따른 침입 감지 시스템은 사용자의 외출 모드 하에서, 소음을 수집하고, 수집된 소음에 변이가 발생한 경우, 상기 소음에 대한 정보를 서버에 전송하는 가전 기기와 상기 가전 기기로부터 수신된 소음이 이상 소음인지를 판단하고, 수신된 소음이 상기 이상 소음으로 판단된 경우, 로봇 청소기를 상기 가전 기기가 위치한 곳으로 이동시키기 위한 이동 명령을 상기 로봇 청소기에 전송하는 상기 서버 및 상기 서버로부터 수신된 이동 명령에 따라 상기 가전 기기의 위치로 이동하는 상기 로봇 청소기를 포함한다.
본 발명의 적용 가능성의 추가적인 범위는 이하의 상세한 설명으로부터 명백해질 것이다. 그러나 본 발명의 사상 및 범위 내에서 다양한 변경 및 수정은 당업자에게 명확하게 이해될 수 있으므로, 상세한 설명 및 본 발명의 바람직한 실시 예와 같은 특정 실시 예는 단지 예시로 주어진 것으로 이해되어야 한다.
본 발명의 실시 예에 따르면, 댁내에 별도의 값비싼 보안 시스템을 갖추지 않고도, 침입자를 감지할 수 있다.
또한, 본 발명의 실시 예에 따르면, 댁내에 로봇 청소기가 위치하지 않은 곳에 침입자가 침입한 경우에도, 침입자를 감지할 수 있다.
도 1은 본 발명의 일 실시 예에 따른 침입 감지 시스템의 구성을 설명하기 위한 도면이다.
도 2는 본 발명의 일 실시 예에 따른 가전 기기의 구성을 설명하기 위한 블록도이다.
도 3은 본 발명의 일 실시 예에 따른 가전 기기의 동작 방법을 설명하기 위한 흐름도이다.
도 4는 본 발명의 일 실시 예에 따라 발자국 소리에 대응하는 음성 파형의 예를 설명하는 도면이고, 도 5는 발자국 소리에 대응하는 음성 파형의 에너지 레벨의 예를 설명하는 도면이다.
도 6은 본 발명의 일 실시 예에 따른 침입 감지 시스템의 동작 방법을 설명하기 위한 래더다이어 그램이다.
도 7은 댁내에 침입자가 침입한 상황에서, 가전 기기 및 로봇 청소기의 동작 시나리오를 설명하는 도면이다.
도 2는 본 발명의 일 실시 예에 따른 가전 기기의 구성을 설명하기 위한 블록도이다.
도 3은 본 발명의 일 실시 예에 따른 가전 기기의 동작 방법을 설명하기 위한 흐름도이다.
도 4는 본 발명의 일 실시 예에 따라 발자국 소리에 대응하는 음성 파형의 예를 설명하는 도면이고, 도 5는 발자국 소리에 대응하는 음성 파형의 에너지 레벨의 예를 설명하는 도면이다.
도 6은 본 발명의 일 실시 예에 따른 침입 감지 시스템의 동작 방법을 설명하기 위한 래더다이어 그램이다.
도 7은 댁내에 침입자가 침입한 상황에서, 가전 기기 및 로봇 청소기의 동작 시나리오를 설명하는 도면이다.
이하, 첨부된 도면을 참조하여 본 명세서에 개시된 실시 예를 상세히 설명하되, 도면 부호에 관계없이 동일하거나 유사한 구성요소는 동일한 참조 번호를 부여하고 이에 대한 중복되는 설명은 생략하기로 한다. 이하의 설명에서 사용되는 구성요소에 대한 접미사 "모듈" 및 "부"는 명세서 작성의 용이함만이 고려되어 부여되거나 혼용되는 것으로서, 그 자체로 서로 구별되는 의미 또는 역할을 갖는 것은 아니다. 또한, 본 명세서에 개시된 실시 예를 설명함에 있어서 관련된 공지 기술에 대한 구체적인 설명이 본 명세서에 개시된 실시 예의 요지를 흐릴 수 있다고 판단되는 경우 그 상세한 설명을 생략한다. 또한, 첨부된 도면은 본 명세서에 개시된 실시 예를 쉽게 이해할 수 있도록 하기 위한 것일 뿐, 첨부된 도면에 의해 본 명세서에 개시된 기술적 사상이 제한되지 않으며, 본 발명의 사상 및 기술 범위에 포함되는 모든 변경, 균등물 내지 대체물을 포함하는 것으로 이해되어야 한다.
제1, 제2 등과 같이 서수를 포함하는 용어는 다양한 구성요소들을 설명하는데 사용될 수 있지만, 상기 구성요소들은 상기 용어들에 의해 한정되지는 않는다. 상기 용어들은 하나의 구성요소를 다른 구성요소로부터 구별하는 목적으로만 사용된다.
어떤 구성요소가 다른 구성요소에 "연결되어" 있다거나 "접속되어" 있다고 언급된 때에는, 그 다른 구성요소에 직접적으로 연결되어 있거나 또는 접속되어 있을 수도 있지만, 중간에 다른 구성요소가 존재할 수도 있다고 이해되어야 할 것이다. 반면에, 어떤 구성요소가 다른 구성요소에 "직접 연결되어" 있다거나 "직접 접속되어" 있다고 언급된 때에는, 중간에 다른 구성요소가 존재하지 않는 것으로 이해되어야 할 것이다.
단수의 표현은 문맥상 명백하게 다르게 뜻하지 않는 한, 복수의 표현을 포함한다. 본 출원에서, "포함한다" 또는 "가지다" 등의 용어는 명세서상에 기재된 특징, 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것이 존재함을 지정하려는 것이지, 하나 또는 그 이상의 다른 특징들이나 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것들의 존재 또는 부가 가능성을 미리 배제하지 않는 것으로 이해되어야 한다.
본 명세서에서 설명되는 가전 기기는 휴대폰, 스마트 폰(smart phone), 노트북 컴퓨터(laptop computer), 에어컨, 냉장고, 세탁기, TV, 스타일러 중 어느 하나일 수 있다.
도 1은 본 발명의 일 실시 예에 따른 침입 감지 시스템의 구성을 설명하기 위한 도면이다.
본 발명의 일 실시 예에 따른 침입 감지 시스템(1)은 복수의 가전 기기들(100-1 내지 100-4), 로봇 청소기(200) 및 서버(300)를 포함할 수 있다.
복수의 가전 기기들(100-1 내지 100-4) 각각은 댁 내에 배치되며, 에어컨, 냉장고, 세탁기, TV, 스타일러 중 어느 하나일 수 있다.
복수의 가전 기기들(100-1 내지 100-4) 및 로봇 청소기(200)는 서로 근거리 무선 통신을 수행할 수 있다. 이를 위해, 복수의 가전 기기들(100-1 내지 100-4) 및 로봇 청소기(200) 각각은 와이파이 모듈, 블루투스 모듈과 같은 근거리 통신 모듈을 포함할 수 있다.
복수의 가전 기기들(100-1 내지 100-4) 및 로봇 청소기(200)는 서버(300)와 통신을 수행할 수 있다.
복수의 가전 기기들(100-1 내지 100-4) 각각은 수집한 소음 정보를 서버에 전송할 수 있다.
로봇 청소기(200)는 서버로부터 댁내의 특정 위치로 이동을 요청하는 명령을 수신할 수 있다.
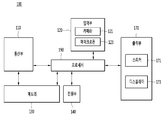
도 2는 본 발명의 일 실시 예에 따른 가전 기기의 구성을 설명하기 위한 블록도이다.
도 2를 참조하면, 가전 기기(100)는 통신부(110), 입력부(120), 메모리(130), 전원부(140), 출력부(170) 및 프로세서(190)를 포함할 수 있다.
통신부(110)는 다른 가전 기기, 로봇 청소기(200) 또는 서버(300)와 무선으로 통신을 수행할 수 있다.
입력부(120)는 카메라(121) 및 마이크로폰(123)을 포함할 수 있다.
카메라(121)는 가전 기기(100)의 주변을 촬영할 수 있다.
마이크로폰(123)은 주위의 소음을 입력 받을 수 있다.
마이크로폰(123)은 사용자의 외출 모드 하에서, 실시간으로, 주위의 소음을 입력 받을 수 있다.
메모리(130)는 카메라(121)가 촬영한 영상 또는 마이크로폰(123)에 입력된 소음을 저장할 수 있다.
전원부(140)는 가전 기기(100)의 각 구성 요소들에 전원을 공급할 수 있다.
출력부(170)는 오디오 출력부(171) 및 디스플레이(173)를 포함할 수 있다.
오디오 출력부(171)는 오디오를 출력할 수 있다.
디스플레이(173)는 영상을 표시할 수 있다.
프로세서(190)는 가전 기기(100)의 전반적인 동작을 제어할 수 있다.
도 3은 본 발명의 일 실시 예에 따른 가전 기기의 동작 방법을 설명하기 위한 흐름도이다.
도 3을 참조하면, 가전 기기(100)의 프로세서(190)는 가전 기기(100)의 동작 모드를 외출 모드로 진입시킨다(S301).
일 실시 예에서, 프로세서(190)는 사용자의 이동 단말기(예를 들어, 휴대폰)로부터 외출 모드로의 진입을 위한 요청을 수신할 수 있다.
또 다른 실시 예에서, 프로세서(190)는 가전 기기(100)에 구비된 버튼을 선택하는 입력에 따라 가전 기기(100)의 동작 모드를 외출 모드로 진입시킬 수 있다.
댁 내에 구비된 복수의 가전 기기들(100-1 내지 100-4) 및 로봇 청소기(200) 중 어느 하나는 외출 모드로의 진입을 위한 요청을 이동 단말기로부터 수신한 경우, 나머지 가전 기기에 상기 요청을 전송할 수 있다.
이에 따라, 어느 하나의 가전 기기(100)가 외출 모드로 진입하는 경우, 나머지 가전 기기들도, 외출 모드로 진입할 수 있다.
가전 기기(100)의 외출 모드 하에서, 프로세서(190)는 마이크로폰(123)을 통해 주변 소음을 수집할 수 있다.
마이크로폰(123)은 외출 모드 하에서, 실시간 또는 주기적으로, 소음을 입력 받을 수 있다.
프로세서(190)는 외출 모드로의 진입에 따라 마이크로폰(123)을 통해 소음을 수집한다(S303). 수집된 소음은 메모리(130)에 저장될 수 있다.
마이크로폰(123)은 10초 간격으로, 소음을 수집할 수 있으나, 이는 예시에 불과한 수치이다.
프로세서(190)는 수집된 소음이 이상 소음인지를 판단한다(S305).
일 실시 예에서, 프로세서(190)는 소음에 대응하는 음성 파형의 패턴이 기 설정된 패턴을 갖는 경우, 수집된 소음을 이상 소음으로 판단할 수 있다.
구체적으로, 프로세서(190)는 수집된 소음에 대응하는 음성 파형의 크기가 주기적으로, 기준 크기를 넘는 경우, 해당 소음을 이상 소음으로 판단할 수 있다.
또 다른 실시 예에서, 프로세서(190)는 소음에 대응하는 음성 파형의 에너지 레벨이 주기적으로, 기준 에너지 레벨을 넘는 경우, 해당 소음을 이상 소음으로 판단할 수 있다.
이에 대해서는 도 4 및 도 5를 참조하여, 설명한다.
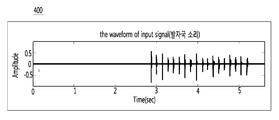
도 4는 본 발명의 일 실시 예에 따라 발자국 소리에 대응하는 음성 파형의 예를 설명하는 도면이고, 도 5는 발자국 소리에 대응하는 음성 파형의 에너지 레벨의 예를 설명하는 도면이다.
먼저, 도 4를 참조하면, 발자국 소리에 대한 음성 파형(400)이 도시되어 있다. 음성 파형(400)의 크기는 주기적 또는 비주기적으로, 기준 크기(0)를 초과할 수 있다.
프로세서(190)는 음성 파형(400)의 크기가 일정 시간 동안 기준 횟수 이상 기준 크기를 초과하는 경우, 해당 소음을 이상 소음으로 판단할 수 있다.
프로세서(400)는 도 4에 도시된 바와 같은 음성 파형(400)의 패턴이 감지된 경우, 수집된 소음을 이상 소음으로 판단할 수 있다.
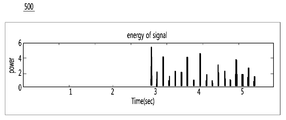
다음으로, 도 5를 설명한다.
도 5를 참조하면, 발자국 소리에 대한 음성 파형에 대응하는 에너지 레벨(500)이 도시되어 있다.
프로세서(190)는 에너지 레벨이 일정 시간 동안 기준 횟수 이상 기준 레벨을 초과하는 경우, 해당 소음을 이상 소음으로 판단할 수 있다.
또 다른 실시 예에서, 프로세서(190)는 소음에 대응하는 음성 파형(400)의 크기가 일정 시간 동안 기준 횟수 이상 기준 크기를 초과하고, 소음에 대응하는 에너지 레벨이 일정 시간 동안 기준 횟수 이상 기준 레벨을 초과하는 경우, 해당 소음을 이상 소음으로 판단할 수 있다.
다시, 도 3을 설명한다.
프로세서(190)는 수집된 소음이 이상 소음으로 판단된 경우, 로봇 청소기(200)의 위치를 가전 기기(100)가 위치한 곳으로 이동시키기 위한, 이동 명령을 로봇 청소기(200)에 전송한다(S309).
프로세서(190)는 수집된 소음이 이상 소음으로 판단된 경우, 통신부(110)를 통해 상기 이동 명령을 로봇 청소기(200)에 전송할 수 있다.
로봇 청소기(200)는 댁내에 구비된 복수의 가전 기기들(100-1 내지 100-4) 각각의 위치 정보를 미리 저장할 수 있다.
또 다른 실시 예에서, 프로세서(190)는 이동 명령과 함께 가전 기기(100)의 위치 정보를 로봇 청소기(200)에 전송할 수 있다.
로봇 청소기(200)는 가전 기기(100)로부터 수신된 이동 명령에 따라 가전 기기(100)가 위치한 곳으로 이동하도록 내부에 구비된 모터를 제어하고, 이동 후, 구비된 카메라를 이용하여, 주변 영상을 촬영한다(S309).
로봇 청소기(200)는 이동 명령에 따라 댁내에 침입자가 침입한 것으로 판단하고, 이동 명령을 전송한 가전 기기(100)의 위치로, 이동할 수 있다.
그 후, 로봇 청소기(200)는 구비된 카메라를 이용하여, 가전 기기(100)의 주위를 촬영할 수 있다.
로봇 청소기(200)는 촬영된 주변 영상, 소음 정보, 댁내에 침입자가 있음을 알리는 침입 알림을 사용자의 이동 단말기(미도시)에 전송한다(S311).
로봇 청소기(200)는 가전 기기(100)의 주위를 촬영한 영상, 로봇 청소기(200)에 구비된 마이크로폰을 통해 입력된 소음 정보, 댁내에 침입자가 있음을 알리는 메시지 중 적어도 하나 이상을 사용자의 이동 단말기에 전송할 수 있다.
이에 따라, 사용자는 외출 시에도, 자신의 집에 침입자가 있음을 빠르게 확인할 수 있다.
또한, 본 발명의 실시 예에 따르면, 댁내에 별도의 값비싼 보안 시스템을 갖추지 않고도, 침입자를 감지할 수 있다.
또한, 본 발명의 실시 예에 따르면, 로봇 청소기(200)가 위치하지 않은 곳에 침입자가 침입한 경우에도, 침입자를 감지할 수 있다.
위에서는, 로봇 청소기(200)가 가전 기기(100)의 주위를 촬영하여, 촬영된 영상을 사용자의 이동 단말기에 전송하는 것을 예로 들었으나, 이에 한정될 필요는 없다.
즉, 단계(S305)에서, 프로세서(190)는 수집된 소음이 이상 소음으로 판단된 경우, 가전 기기(100)에 구비된 카메라(121)를 이용하여, 가전 기기(100)의 주변을 촬영하고, 촬영된 영상을 사용자의 이동 단말기에 전송할 수도 있다.
또한, 프로세서(190)는 수집된 소음이 이상 소음으로 판단된 경우, 자신의 카메라(121) 이외에, 다른 가전 기기들 각각에 구비된 카메라를 온 시키기 위한 온 명령을 다른 가전 기기들에 전송할 수도 있다.
다른 가전 기기들 각각은 수신된 온 명령에 따라 카메라를 온 시켜, 자신의 주위를 촬영할 수 있다. 촬영된 영상은 사용자의 이동 단말기로 전송될 수 있다.
이에 따라, 침입자가 다른 가전 기기 쪽으로 이동된 경우에도, 침입자의 상황이 모니터링 될 수 있다.
도 6은 본 발명의 일 실시 예에 따른 침입 감지 시스템의 동작 방법을 설명하기 위한 래더다이어 그램이다.
특히, 도 6은 가전 기기들 및 서버(300)와 연동하여, 침입자를 감지하는 방법에 관한 도면이다.
도 6을 참조하면, 제1 가전 기기(100-1) 및 제2 가전 기기(100-2)는 사용자의 요청에 따라 외출 모드로 진입한다(S601, S602).
제1 가전 기기(100-1) 및 제2 가전 기기(100-2)는 외출 모드로의 진입에 따라 마이크로폰(123)을 통해 소음을 수집한다(S603, S605).
제1 가전 기기(100-1) 및 제2 가전 기기(100-2)는 수집된 소음의 변이가 발생했는지를 판단한다(S605, S606).
일 실시 예에서, 각 가전 기기는 수집된 소음의 크기가 변화된 경우, 소음의 변이가 발생한 것으로 판단할 수 있다.
제1 가전 기기(100-1) 및 제2 가전 기기(100-2)는 소음의 변이가 발생한 경우, 소음 정보를 서버(300)에 전송한다(S607, S608).
소음의 변이를 감지한 가전 기기(100)는 해당 소음에 대한 정보를 서버(300)에 전송할 수 있다.
서버(300)는 제1 가전 기기(100-1) 및 제2 가전 기기(100-2) 각각으로부터 수신된 소음 정보에 기초하여, 이상 소음이 발생했는지를 판단한다(S609).
서버(300)가 이상 소음이 발생한 것으로 판단하는 과정은 도 4 및 도 5의 실시 예로 대체한다.
서버(300)는 이상 소음이 발생한 경우, 이상 소음이 발생한 가전 기기의 위치로 로봇 청소기(200)의 이동을 명령하는 이동 명령을 로봇 청소기(200)에 전송한다(S611).
서버(300)는 댁내에 구비된 가전 기기들(100-1, 100-2) 각각의 위치 정보를 미리 저장하고 있을 수 있다.
가전 기기(100)의 위치 정보는 댁내에서, 가전 기기(100)의 위치를 나타내는 좌표 정보를 포함할 수 있다.
로봇 청소기(200)는 수신된 이동 명령에 따라 이상 소음이 발생된 가전 기기(100)의 위치로 이동하도록 내부에 구비된 모터를 제어하고, 이동 후, 구비된 카메라를 이용하여, 주변 영상을 촬영한다(S613).
로봇 청소기(200)는 촬영된 주변 영상, 소음 정보, 댁내에 침입자가 있음을 알리는 침입 알림을 사용자의 이동 단말기(미도시)에 전송한다(S615).
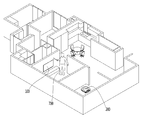
도 7은 댁내에 침입자가 침입한 상황에서, 가전 기기 및 로봇 청소기의 동작 시나리오를 설명하는 도면이다.
도 7을 참조하면, 가전 기기(100)는 외출 모드로 동작하고, 가전 기기(100)가 위치한 곳에, 침입자(700)가 들어온 상황을 가정한다.
가전 기기(100)에 구비된 마이크로폰(123)은 주변 소음을 수집할 수 있다.
가전 기기(100)는 수집된 소음이 이상 소음으로 판단된 경우, 로봇 청소기(200)를 가전 기기(100)가 위치한 곳으로 이동시키는 이동 명령을 전송할 수 있다.
로봇 청소기(200)는 이동 명령의 수신에 따라 가전 기기(100)가 위치한 곳으로 이동하고, 가전 기기(100)의 주변을 촬영할 수 있다.
로봇 청소기(200)는 촬영된 영상을 사용자의 이동 단말기에 전송할 수 있다.
사용자는 이동 단말기를 통해 수신된 영상을 통해, 침입자가 댁내에 침입했는지 여부를 빠르게 확인할 수 있고, 이에 따른 조치를 수행할 수 있다.
전술한 본 발명은, 프로그램이 기록된 매체에 컴퓨터가 읽을 수 있는 코드로서 구현하는 것이 가능하다. 컴퓨터가 읽을 수 있는 매체는, 컴퓨터 시스템에 의하여 읽혀질 수 있는 데이터가 저장되는 모든 종류의 기록장치를 포함한다. 컴퓨터가 읽을 수 있는 매체의 예로는, HDD(Hard Disk Drive), SSD(Solid State Disk), SDD(Silicon Disk Drive), ROM, RAM, CD-ROM, 자기 테이프, 플로피 디스크, 광 데이터 저장 장치 등이 있다. 또한, 상기 컴퓨터는 단말기의 제어부(180)를 포함할 수도 있다.
따라서, 상기의 상세한 설명은 모든 면에서 제한적으로 해석되어서는 아니되고, 예시적인 것으로 고려되어야 한다. 본 발명의 범위는 첨부된 청구항의 합리적 해석에 의해 결정되어야 하고, 본 발명의 등가적 범위 내에서의 모든 변경은 본 발명의 범위에 포함된다.
Claims (10)
- 가전 기기에 있어서,
상기 가전 기기의 외출 모드 하에서, 소음을 수집하는 마이크로폰;
로봇 청소기와 무선 통신을 수행하는 통신부; 및
수집된 소음이 이상 소음인지를 판단하고, 수집된 소음이 상기 이상 소음으로 판단된 경우, 상기 통신부를 통해, 상기 로봇 청소기를 상기 가전 기기가 위치한 곳으로 이동시키기 위한 이동 명령을 상기 로봇 청소기에 전송하는 프로세서를 포함하는
가전 기기. - 제1항에 있어서,
상기 프로세서는
상기 수집된 소음에 대응하는 음성 파형이 기 설정된 패턴을 갖는 경우, 상기 수집된 소음을 상기 이상 소음으로 판단하는
가전 기기. - 제1항에 있어서,
상기 프로세서는
일정 시간 동안 상기 수집된 소음에 대응하는 음성 파형의 크기가 기준 횟수 이상 기준 크기를 초과하는 경우, 상기 수집된 소음을 상기 이상 소음으로 판단하는
가전 기기. - 제1항에 있어서,
상기 프로세서는
일정 시간 동안 상기 수집된 소음의 에너지 레벨이 기준 횟수 이상 기준 레벨을 초과하는 경우, 상기 수집된 소음을 상기 이상 소음으로 판단하는
가전 기기. - 제1항에 있어서,
상기 프로세서는
일정 시간 동안 상기 수집된 소음에 대응하는 음성 파형의 크기가 기준 횟수 이상 기준 크기를 초과하고, 상기 소음의 에너지 레벨이 기준 횟수 이상 기준 레벨을 초과하는 경우, 상기 수집된 소음을 상기 이상 소음으로 판단하는
가전 기기. - 제1항에 있어서,
영상을 촬영하는 카메라를 더 포함하고,
상기 프로세서는
상기 이상 소음이 발생한 것으로 판단한 경우,
상기 카메라를 통해 상기 가전 기기의 주위를 촬영하는
가전 기기. - 침입 감지 시스템에 있어서,
사용자의 외출 모드 하에서, 소음을 수집하고, 수집된 소음에 변이가 발생한 경우, 상기 소음에 대한 정보를 서버에 전송하는 가전 기기;
상기 가전 기기로부터 수신된 소음이 이상 소음인지를 판단하고, 수신된 소음이 상기 이상 소음으로 판단된 경우, 로봇 청소기를 상기 가전 기기가 위치한 곳으로 이동시키기 위한 이동 명령을 상기 로봇 청소기에 전송하는 상기 서버; 및
상기 서버로부터 수신된 이동 명령에 따라 상기 가전 기기의 위치로 이동하는 상기 로봇 청소기를 포함하는
침입 감지 시스템. - 제7항에 있어서,
상기 로봇 청소기는
상기 가전 기기의 주변을 촬영하고, 촬영된 영상 및 상기 가전 기기의 주변에서 수집한 소음을 상기 사용자의 이동 단말기로 전송하는
침입 감지 시스템. - 제7항에 있어서,
상기 서버는
상기 프로세서는
일정 시간 동안 상기 수집된 소음에 대응하는 음성 파형의 크기가 기준 횟수 이상 기준 크기를 초과하는 경우, 상기 수집된 소음을 상기 이상 소음으로 판단하는
침입 감지 시스템. - 제7항에 있어서,
상기 서버는
일정 시간 동안 상기 수집된 소음의 에너지 레벨이 기준 횟수 이상 기준 레벨을 초과하는 경우, 상기 수집된 소음을 상기 이상 소음으로 판단하는
침입 감지 시스템.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180132148A KR20200049189A (ko) | 2018-10-31 | 2018-10-31 | 가전 기기 |
| US16/398,639 US20200134995A1 (en) | 2018-10-31 | 2019-04-30 | Home device |
| PCT/KR2019/014552 WO2020091441A2 (ko) | 2018-10-31 | 2019-10-31 | 가전 기기 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180132148A KR20200049189A (ko) | 2018-10-31 | 2018-10-31 | 가전 기기 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200049189A true KR20200049189A (ko) | 2020-05-08 |
Family
ID=70327407
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180132148A KR20200049189A (ko) | 2018-10-31 | 2018-10-31 | 가전 기기 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20200134995A1 (ko) |
| KR (1) | KR20200049189A (ko) |
| WO (1) | WO2020091441A2 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022234944A1 (ko) * | 2021-05-03 | 2022-11-10 | 삼성전자 주식회사 | 청소 로봇을 제어하는 방법 및 시스템 |
| WO2023140489A1 (ko) * | 2022-01-20 | 2023-07-27 | 삼성전자주식회사 | 건조기, 서버 및 그 제어 방법 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20090012542A (ko) * | 2007-07-30 | 2009-02-04 | 주식회사 마이크로로봇 | 로봇을 이용한 홈 모니터링 시스템 |
| JP2014137767A (ja) * | 2013-01-18 | 2014-07-28 | Hochiki Corp | イベント監視システム |
| JP2014229097A (ja) * | 2013-05-23 | 2014-12-08 | 三菱電機株式会社 | 監視機能付空気調和機 |
| KR102195897B1 (ko) * | 2013-06-05 | 2020-12-28 | 삼성전자주식회사 | 음향 사건 검출 장치, 그 동작 방법 및 그 동작 방법을 컴퓨터에서 실행시키기 위한 프로그램을 기록한 컴퓨터 판독 가능 기록 매체 |
| JP6726082B2 (ja) * | 2016-10-24 | 2020-07-22 | 株式会社アニモ | 防犯に関わる音の判定方法及び情報処理装置 |
-
2018
- 2018-10-31 KR KR1020180132148A patent/KR20200049189A/ko not_active IP Right Cessation
-
2019
- 2019-04-30 US US16/398,639 patent/US20200134995A1/en not_active Abandoned
- 2019-10-31 WO PCT/KR2019/014552 patent/WO2020091441A2/ko active Application Filing
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022234944A1 (ko) * | 2021-05-03 | 2022-11-10 | 삼성전자 주식회사 | 청소 로봇을 제어하는 방법 및 시스템 |
| WO2023140489A1 (ko) * | 2022-01-20 | 2023-07-27 | 삼성전자주식회사 | 건조기, 서버 및 그 제어 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2020091441A2 (ko) | 2020-05-07 |
| WO2020091441A3 (ko) | 2020-06-25 |
| US20200134995A1 (en) | 2020-04-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102155535B1 (ko) | 홈 모니터링 방법 및 장치 | |
| EP4343728A2 (en) | Digital fingerprint tracking | |
| US10043377B2 (en) | Monitoring system | |
| US11457183B2 (en) | Dynamic video exclusion zones for privacy | |
| CN110011997A (zh) | 入侵检测方法及装置和计算机可读存储介质 | |
| CN105049807A (zh) | 监控画面声音采集方法及装置 | |
| KR100760209B1 (ko) | 바닥센서부를 이용한 방범시스템 | |
| KR20200049189A (ko) | 가전 기기 | |
| KR101446416B1 (ko) | 자동 녹화 및 실시간 영상 통화가 가능한 가정용 블랙박스 장치 및 그 시스템 | |
| KR101020670B1 (ko) | 원격테스트 기능을 구비한 방범 시스템 | |
| CN104678770A (zh) | 位移事件检测方法和系统 | |
| CN105488965A (zh) | 报警方法及装置 | |
| JP2003123177A (ja) | 情報処理装置、センサネットワークシステム、情報処理プログラム、および情報処理プログラムを記録したコンピュータ読み取り可能な記録媒体 | |
| KR20170077113A (ko) | 모니터링 장치 및 그 장치의 제어 방법 | |
| KR20150035108A (ko) | 와이파이 다이렉트를 이용한 로봇 청소기 및 방범 시스템 | |
| KR101914813B1 (ko) | 통신 단말기를 이용한 도어락 제어 장치 및 방법 | |
| KR102194903B1 (ko) | 착탈식 가정용 현관 도어 블랙박스 | |
| KR20150136226A (ko) | 출입자 관리 시스템 및 이의 제어 방법 | |
| KR20070061081A (ko) | 보안 로봇 및 로봇을 이용한 보안 방법 | |
| KR101622610B1 (ko) | Uwb 센서를 이용한 홈 무선 네트워크 카메라 스마트 인증 시스템 및 이를 이용한 인증 방법 | |
| KR20160102914A (ko) | 스마트폰을 이용한 무선 보안 시스템 | |
| CN105100749A (zh) | 摄像方法、装置及终端 | |
| KR102241027B1 (ko) | 착탈식 가정용 블랙박스 | |
| JP2024053859A (ja) | 警備システム | |
| CN104038483A (zh) | 安全控制方法及装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| AMND | Amendment | ||
| X091 | Application refused [patent] | ||
| AMND | Amendment | ||
| X601 | Decision of rejection after re-examination |