KR20180098360A - 레이저 스캔 시스템, 레이저 스캔 방법, 이동 레이저 스캔 시스템 및 프로그램 - Google Patents
레이저 스캔 시스템, 레이저 스캔 방법, 이동 레이저 스캔 시스템 및 프로그램 Download PDFInfo
- Publication number
- KR20180098360A KR20180098360A KR1020187021417A KR20187021417A KR20180098360A KR 20180098360 A KR20180098360 A KR 20180098360A KR 1020187021417 A KR1020187021417 A KR 1020187021417A KR 20187021417 A KR20187021417 A KR 20187021417A KR 20180098360 A KR20180098360 A KR 20180098360A
- Authority
- KR
- South Korea
- Prior art keywords
- rotation
- detection
- rotation angle
- laser
- angle range
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/25—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures by projecting a pattern, e.g. one or more lines, moiré fringes on the object
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4817—Constructional features, e.g. arrangements of optical elements relating to scanning
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/002—Measuring arrangements characterised by the use of optical techniques for measuring two or more coordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/4808—Evaluating distance, position or velocity data
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/10—Scanning systems
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/10—Scanning systems
- G02B26/101—Scanning systems with both horizontal and vertical deflecting means, e.g. raster or XY scanners
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Electromagnetism (AREA)
- Optics & Photonics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
도 2는 레이저 스캐너(11)가 방사하는 레이저 펄스에 의해, 좌표점 추출부(12)가 검지 대상물에 대응하는 공간 광 점의 삼차원 공간에 있어서의 좌표를 추출하는 처리를 설명하는 도면이다.
도 3은 지면(地面)에 대응하는 공간 광 점이 제거된 점군(point group)에 있어서의 공간 광 점의 각각의 클러스터링(clustering) 처리를 설명하는 도면이다.
도 4는 검지 대상 검지부(17)가 특징량을 검지하여 클러스터의 삼차원 점군으로부터 클러스터(cluster)의 분류를 행하는 처리를 설명하는 도면이다.
도 5는 트래킹부(18)가 행하는 클러스터의 삼차원 점군의 트래킹 처리를 설명하는 도면이다.
도 6은 회전 테이블의 회전과 레이저 스캐너(11)의 레이저 펄스의 방사 방향의 관계를 설명하는 도면이다.
도 7은 회전 테이블을 0°에서부터 360°의 회전 각도 범위에서 공전(公轉)시키고, 레이저 펄스의 방사 방향을 0°에서부터 270°의 회전 각도 범위에서 자전(自轉)시켰을 경우의 레이저 펄스의 방사면을 나타내는 도면이다.
도 8은 회전 테이블의 회전 속도에 대응하여 변화하는 레이저 펄스의 방사 밀도를 나타내는 도면이다.
도 9는 회전 테이블의 회전에 있어서의 검지 회전 각도 범위 및 비검지 회전 각도 범위의 각각을 설명하는 도면이다.
도 10은 회전 테이블의 회전 속도에 대응한 검지 회전 각도 범위 및 비검지 회전 각도 범위의 각각에 있어서의 레이저 펄스의 방사 밀도를 나타내는 도면이다.
도 11은 제2 실시 형태에 따른 레이저 스캔 시스템의 구성예를 나타내는 도면이다.
도 12는 제4 실시 형태에 따른 레이저 스캔 시스템의 구성예를 나타내는 도면이다.
도 13은 제4 실시 형태에 있어서의 검지 회전 각도 범위에 대한 레이저 펄스의 조사 밀도의 조정 결과의 일례를 나타내는 도면이다.
도 14는 제5 실시 형태에 따른 레이저 스캔 시스템의 구성예를 나타내는 도면이다.
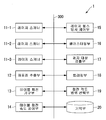
도 15는 제5 실시 형태에 따른 자세 및 위치의 추정을 행하는 처리의 동작예를 나타내는 순서도이다.
12…좌표점 추출부 13…테이블 회전 기구부
14, 14A…테이블 회전 속도 제어부 15…레이저 펄스 방사 제어부
16…클러스터링부 17, 17A…검지 대상 검지부
18, 18A…트래킹부 19…회전 각도 범위 선택부
20…기억부 21, 21B…삼차원 복원부
22…대상 물체 추출부 23, 23B…회전 각도 범위 추정부
24…자세 추정부 25…환경 매칭부
D, E…방사 영역
Claims (15)
- 제1 회전축을 회전 중심으로 하여 소정의 제1 회전축 회전 속도로 회전하는 제1 회전 기구와,
상기 제1 회전 기구의 상기 제1 회전축 회전 속도를 제어하는 제1 회전 속도 제어부와,
상기 제1 회전 기구에 마련되어, 상기 제1 회전 기구와 함께 회전하고, 레이저를 조사하여 검지 대상의 거리를 계측하는 레이저 거리 계측 유닛을 가지는 레이저 스캐너를 구비하고,
상기 제1 회전 속도 제어부가, 검지 대상이 존재하는 영역에 대응하는 검지 회전 각도 범위 및 검지 대상이 존재하지 않는 영역에 대응하는 비검지 회전 각도 범위의 각각에 있어서의 제1 회전축 회전 속도를 제어하는 것을 특징으로 하는 레이저 스캔 시스템. - 청구항 1에 있어서,
상기 검지 대상이 존재하는 영역을 검지하는 검지 대상 검지부를 추가로 구비하는 것을 특징으로 하는 레이저 스캔 시스템. - 청구항 2에 있어서,
상기 검지 대상 검지부가 상기 검지 대상을 검지한 상기 제1 회전 기구의 회전 각도의 범위를 나타내는 상기 검지 회전 각도 범위와, 상기 검지 대상을 검지하고 있지 않은 상기 제1 회전 기구의 회전 각도의 범위를 나타내는 상기 비검지 회전 각도 범위를 구하는 회전 각도 범위 선택부를 추가로 가지는 것을 특징으로 하는 레이저 스캔 시스템. - 청구항 3에 있어서,
미리 설정된 추출 조건에 대응하는 상기 검지 대상을 검지한 상기 제1 회전 기구의 회전 각도의 범위를 상기 검지 회전 각도 범위로서 추출하는 대상 물체 추출부를 추가로 구비하는 것을 특징으로 하는 레이저 스캔 시스템. - 청구항 4에 있어서,
상기 추출 조건에 대응하는 상기 검지 대상이 존재하는 상기 제1 회전 기구의 회전 각도의 범위를 나타내는 상기 검지 회전 각도 범위와, 당해 검지 대상이 존재하지 않는 상기 제1 회전 기구의 회전 각도의 범위를 나타내는 상기 비검지 회전 각도 범위를, 상기 검지 대상과 레이저 스캔 시스템의 상대 위치 관계 및 상대 속도의 각각에 기초하여 추정하는 회전 각도 범위 추정부를 추가로 가지는 것을 특징으로 하는 레이저 스캔 시스템. - 청구항 1 내지 청구항 5 중 어느 한 항에 있어서,
상기 제1 회전 속도 제어부가 상기 검지 회전 각도 범위에 있어서의 상기 제1 회전축 회전 속도를, 상기 비검지 회전 각도 범위에 있어서의 상기 제1 회전축 회전 속도보다 느리게 하는 제어를 행하는 것을 특징으로 하는 레이저 스캔 시스템. - 청구항 1 내지 청구항 6 중 어느 한 항에 있어서,
상기 레이저 스캐너가,
소정의 주사면상에 상기 레이저가 조사되도록, 당해 레이저의 방사 방향을 주사하는 기구를 가지는 것을 특징으로 하는 레이저 스캔 시스템. - 청구항 7에 있어서,
상기 레이저 스캐너가,
상기 레이저의 방사 방향을 디지털 미러 디바이스로 주사하는 것을 특징으로 하는 레이저 스캔 시스템. - 청구항 1 내지 청구항 8 중 어느 한 항에 있어서,
상기 레이저 스캐너가,
상기 제1 회전축에 대해서 소정의 각도를 이루는 직선을 제2 회전축으로 하고, 상기 제2 회전축에 대해서 소정의 각도 방향으로 레이저를 방사하는 레이저 거리 계측 유닛을 소정의 제2 회전축 회전 속도로 회전시키는 제2 회전 기구를 가지는 것을 특징으로 하는 레이저 스캔 시스템. - 청구항 7에 있어서,
상기 제1 회전축과, 상기 제2 회전축이 이루는 상기 각도가 0도를 초과하고, 180도 미만인 것을 특징으로 하는 레이저 스캔 시스템. - 청구항 9 또는 청구항 10에 있어서,
상기 검지 회전 각도 범위 및 상기 비검지 회전 각도 범위의 각각에 있어서의 상기 제2 회전축 회전 속도를 제어하는 제2 회전 속도 제어부를 추가로 가지는 것을 특징으로 하는 레이저 스캔 시스템. - 청구항 1 내지 청구항 11 중 어느 한 항에 있어서,
n개의 상기 레이저 스캐너가 상기 제1 회전 기구에, 상기 제1 회전축의 회전에 대해서 n회 대칭인 위치에 배치되어 있는 것을 특징으로 하는 레이저 스캔 시스템. - 청구항 1 내지 청구항 12 중 어느 한 항에 기재된 레이저 스캔 시스템을 이동체에 탑재한 것을 특징으로 하는 이동 레이저 스캔 시스템.
- 제1 회전 속도 제어부가, 제1 회전축을 회전 중심으로 하여 소정의 제1 회전축 회전 속도로 회전하는 제1 회전 기구에 있어서, 상기 제1 회전축 회전 속도를 제어하는 제1 회전 속도 제어 과정과,
레이저 스캐너가, 상기 제1 회전 기구에 마련되어, 상기 제1 회전 기구와 함께 회전하고, 레이저를 조사하여 검지 대상의 거리를 계측하는 레이저 거리 계측 유닛을 가지는 레이저 스캐너 조작 과정을 포함하고,
상기 제1 회전 속도 제어부가, 검지 대상이 존재하는 영역에 대응하는 검지 회전 각도 범위 및 검지 대상이 존재하지 않는 영역에 대응하는 비검지 회전 각도 범위의 각각에 있어서의 제1 회전축 회전 속도를 제어하는 것을 특징으로 하는 레이저 스캔 방법. - 컴퓨터를,
제1 회전축을 회전 중심으로 하여 소정의 제1 회전축 회전 속도로 회전하는 제1 회전 기구에 있어서, 상기 제1 회전축 회전 속도를 제어하는 제1 회전 속도 제어 수단,
상기 제1 회전 기구에 마련되어, 상기 제1 회전 기구와 함께 회전하고, 레이저를 조사하여 검지 대상의 거리를 계측하는 레이저 거리 계측 유닛을 조작하는 레이저 스캐너 조작 수단으로서 기능시키고,
상기 제1 회전 속도 제어 수단이, 검지 대상이 존재하는 영역에 대응하는 검지 회전 각도 범위 및 검지 대상이 존재하지 않는 영역에 대응하는 비검지 회전 각도 범위의 각각에 있어서의 제1 회전축 회전 속도를 제어하는 처리를 행하는 프로그램.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JPJP-P-2016-016353 | 2016-01-29 | ||
| JP2016016353 | 2016-01-29 | ||
| PCT/JP2017/001229 WO2017130770A1 (ja) | 2016-01-29 | 2017-01-16 | レーザスキャンシステム、レーザスキャン方法、移動レーザスキャンシステム及びプログラム |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207026932A Division KR20200110823A (ko) | 2016-01-29 | 2017-01-16 | 레이저 스캔 시스템, 레이저 스캔 방법, 이동 레이저 스캔 시스템 및 프로그램 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20180098360A true KR20180098360A (ko) | 2018-09-03 |
| KR102159376B1 KR102159376B1 (ko) | 2020-09-23 |
Family
ID=59397680
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207026932A Withdrawn KR20200110823A (ko) | 2016-01-29 | 2017-01-16 | 레이저 스캔 시스템, 레이저 스캔 방법, 이동 레이저 스캔 시스템 및 프로그램 |
| KR1020217040311A Active KR102460225B1 (ko) | 2016-01-29 | 2017-01-16 | 레이저 스캔 시스템, 레이저 스캔 방법, 이동 레이저 스캔 시스템 및 프로그램 |
| KR1020187021417A Active KR102159376B1 (ko) | 2016-01-29 | 2017-01-16 | 레이저 스캔 시스템, 레이저 스캔 방법, 이동 레이저 스캔 시스템 및 프로그램 |
Family Applications Before (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207026932A Withdrawn KR20200110823A (ko) | 2016-01-29 | 2017-01-16 | 레이저 스캔 시스템, 레이저 스캔 방법, 이동 레이저 스캔 시스템 및 프로그램 |
| KR1020217040311A Active KR102460225B1 (ko) | 2016-01-29 | 2017-01-16 | 레이저 스캔 시스템, 레이저 스캔 방법, 이동 레이저 스캔 시스템 및 프로그램 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US11187790B2 (ko) |
| EP (1) | EP3407089B1 (ko) |
| JP (2) | JP6301029B2 (ko) |
| KR (3) | KR20200110823A (ko) |
| CN (1) | CN108603936B (ko) |
| SG (1) | SG11201806223XA (ko) |
| TW (2) | TWI764322B (ko) |
| WO (1) | WO2017130770A1 (ko) |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3315907B1 (de) * | 2016-10-27 | 2025-03-26 | Leica Geosystems AG | Verfahren zur visuellen darstellung von scandaten |
| US10942272B2 (en) * | 2016-12-13 | 2021-03-09 | Waymo Llc | Power modulation for a rotary light detection and ranging (LIDAR) device |
| US10663584B2 (en) * | 2017-05-26 | 2020-05-26 | Toyota Motor Engineering & Manufacturing North America, Inc. | Publishing LIDAR cluster data |
| JP7148229B2 (ja) * | 2017-07-31 | 2022-10-05 | 株式会社トプコン | 三次元点群データの縦断面図作成方法,そのための測量データ処理装置,および測量システム |
| US12298439B2 (en) * | 2018-08-22 | 2025-05-13 | Josephus M. van Seeters | Detection systems, communications systems and induction motors |
| CN109059902B (zh) | 2018-09-07 | 2021-05-28 | 百度在线网络技术(北京)有限公司 | 相对位姿确定方法、装置、设备和介质 |
| JP7096176B2 (ja) * | 2019-02-01 | 2022-07-05 | 株式会社日立製作所 | 物体位置推定装置およびその方法 |
| US10613203B1 (en) * | 2019-07-01 | 2020-04-07 | Velodyne Lidar, Inc. | Interference mitigation for light detection and ranging |
| US11630209B2 (en) * | 2019-07-09 | 2023-04-18 | Waymo Llc | Laser waveform embedding |
| US20210011135A1 (en) * | 2019-07-11 | 2021-01-14 | Electronics And Telecommunications Research Institute | Method for detection of laser reflectors for mobile robot localization and apparatus for the same |
| DE102019129099A1 (de) * | 2019-10-29 | 2021-04-29 | Valeo Schalter Und Sensoren Gmbh | Objekterkennung anhand eines aktiven optischen Sensorsystems |
| CN111290117A (zh) * | 2019-12-24 | 2020-06-16 | 哈尔滨新光光电科技股份有限公司 | 一种光束指向控制方法及系统 |
| CN115667993B (zh) * | 2020-05-26 | 2025-06-03 | 三菱电机株式会社 | 预测追踪装置、预测追踪方法以及计算机能读取的记录介质 |
| EP3944192B1 (en) * | 2020-07-22 | 2025-10-22 | Dassault Systèmes | Method for 3d scanning of a real object |
| CN111928797B (zh) * | 2020-10-12 | 2021-01-01 | 山东海德智汇智能装备有限公司 | 一种基于激光扫描成像的3d高精密检测系统 |
| CN113869196B (zh) * | 2021-09-27 | 2022-04-19 | 中远海运科技股份有限公司 | 一种基于激光点云数据多特征分析的车型分类方法及装置 |
| TWI800287B (zh) | 2022-03-03 | 2023-04-21 | 緯創資通股份有限公司 | 雷達偵測系統及雷達視界方向調整方法 |
| CN114754702B (zh) * | 2022-04-13 | 2023-06-30 | 湖北中烟工业有限责任公司 | 一种物体表面轮廓三维扫描方法、装置及电子设备 |
| JP7467562B1 (ja) | 2022-10-07 | 2024-04-15 | 本田技研工業株式会社 | 外界認識装置 |
| WO2025234400A1 (ja) * | 2024-05-10 | 2025-11-13 | 日本電気株式会社 | 認識装置、認識方法、及びプログラム |
Citations (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07325154A (ja) * | 1994-06-02 | 1995-12-12 | Mazda Motor Corp | スキャン式レーザレーダ装置 |
| JP2002098765A (ja) * | 2000-09-27 | 2002-04-05 | Nissan Motor Co Ltd | 車両用レーダ装置 |
| JP2003329453A (ja) * | 2002-05-10 | 2003-11-19 | Kyokuto Sanki Co Ltd | 部屋の寸法測定装置 |
| JP2005128722A (ja) | 2003-10-23 | 2005-05-19 | Matsushita Electric Works Ltd | 障害物回避機能付き車両 |
| US20070219720A1 (en) * | 2006-03-16 | 2007-09-20 | The Gray Insurance Company | Navigation and control system for autonomous vehicles |
| JP2008186375A (ja) * | 2007-01-31 | 2008-08-14 | Univ Of Tokyo | 物体測定システム |
| US20100053593A1 (en) * | 2008-08-26 | 2010-03-04 | Honeywell International Inc. | Apparatus, systems, and methods for rotating a lidar device to map objects in an environment in three dimensions |
| JP2011196749A (ja) * | 2010-03-18 | 2011-10-06 | Toyota Central R&D Labs Inc | 物体検出装置 |
| JP5107928B2 (ja) * | 2005-10-24 | 2012-12-26 | シエル・インターナシヨネイル・リサーチ・マーチヤツピイ・ベー・ウイ | 現場熱処理法液体からのアルキル化炭化水素の製造方法 |
| JP2013078978A (ja) * | 2011-10-03 | 2013-05-02 | Japan Aerospace Exploration Agency | 航空機搭載レーザ装置用レーザ光反射方法および装置 |
| US20140233790A1 (en) * | 2013-02-19 | 2014-08-21 | Caterpillar Inc. | Motion estimation systems and methods |
| KR101449931B1 (ko) * | 2013-11-27 | 2014-10-15 | 이대봉 | 라이다용 3차원 공간 스캔장치 |
| JP2015081921A (ja) * | 2013-10-21 | 2015-04-27 | ジック アーゲー | 回転軸を中心に運動する走査ユニットを備えるセンサ |
| JP2015535337A (ja) * | 2012-09-14 | 2015-12-10 | ファロ テクノロジーズ インコーポレーテッド | 角度スキャン速度の動的調整を伴うレーザスキャナ |
| KR20160078043A (ko) * | 2014-12-24 | 2016-07-04 | 전자부품연구원 | 2차원 라이더 스캐너의 광학계 및 제어장치 |
| KR20160084084A (ko) * | 2015-01-05 | 2016-07-13 | 한화테크윈 주식회사 | 스캐닝 라이다 장치 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001147269A (ja) | 1999-11-22 | 2001-05-29 | Tokin Corp | 3次元位置測定装置 |
| EP2259125B1 (de) | 2007-10-22 | 2017-07-26 | Tecan Trading AG | Laser Scanner-Gerät für Fluoreszenzmessungen |
| JP2009157269A (ja) * | 2007-12-27 | 2009-07-16 | Ricoh Co Ltd | 光走査装置・画像形成装置 |
| US9322646B2 (en) * | 2010-04-09 | 2016-04-26 | The Trustees Of The Stevens Institute Of Technology | Adaptive mechanism control and scanner positioning for improved three-dimensional laser scanning |
| JP5293686B2 (ja) * | 2010-06-16 | 2013-09-18 | パルステック工業株式会社 | 3次元形状測定装置 |
| CN102971657B (zh) | 2010-07-22 | 2016-06-22 | 瑞尼斯豪公司 | 激光扫描设备和使用方法 |
| JP5583523B2 (ja) * | 2010-08-31 | 2014-09-03 | ダイハツ工業株式会社 | 物体認識装置 |
| TW201329509A (zh) | 2012-01-10 | 2013-07-16 | Walsin Lihwa Corp | 立體掃瞄裝置及其立體掃瞄方法 |
| CN103608696B (zh) * | 2012-05-22 | 2016-05-11 | 韩国生产技术研究院 | 3d扫描系统和获得3d图像的方法 |
| US9383753B1 (en) * | 2012-09-26 | 2016-07-05 | Google Inc. | Wide-view LIDAR with areas of special attention |
| US9043069B1 (en) | 2012-11-07 | 2015-05-26 | Google Inc. | Methods and systems for scan matching approaches for vehicle heading estimation |
| EP2972081B1 (en) * | 2013-03-15 | 2020-04-22 | Apple Inc. | Depth scanning with multiple emitters |
| US10203412B2 (en) | 2013-09-20 | 2019-02-12 | Caterpillar Inc. | Positioning system |
| JP2015206796A (ja) | 2015-05-19 | 2015-11-19 | コモンウェルス サイエンティフィック アンド インダストリアル リサーチ オーガナイゼーション | 3次元走査ビーム・システムおよび方法 |
-
2017
- 2017-01-16 WO PCT/JP2017/001229 patent/WO2017130770A1/ja not_active Ceased
- 2017-01-16 KR KR1020207026932A patent/KR20200110823A/ko not_active Withdrawn
- 2017-01-16 US US16/071,551 patent/US11187790B2/en active Active
- 2017-01-16 TW TW109135752A patent/TWI764322B/zh active
- 2017-01-16 KR KR1020217040311A patent/KR102460225B1/ko active Active
- 2017-01-16 TW TW106101425A patent/TWI710798B/zh active
- 2017-01-16 JP JP2017554531A patent/JP6301029B2/ja active Active
- 2017-01-16 KR KR1020187021417A patent/KR102159376B1/ko active Active
- 2017-01-16 SG SG11201806223XA patent/SG11201806223XA/en unknown
- 2017-01-16 EP EP17744001.3A patent/EP3407089B1/en active Active
- 2017-01-16 CN CN201780008436.7A patent/CN108603936B/zh active Active
-
2018
- 2018-02-26 JP JP2018032288A patent/JP6935346B2/ja active Active
Patent Citations (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07325154A (ja) * | 1994-06-02 | 1995-12-12 | Mazda Motor Corp | スキャン式レーザレーダ装置 |
| JP2002098765A (ja) * | 2000-09-27 | 2002-04-05 | Nissan Motor Co Ltd | 車両用レーダ装置 |
| JP2003329453A (ja) * | 2002-05-10 | 2003-11-19 | Kyokuto Sanki Co Ltd | 部屋の寸法測定装置 |
| JP2005128722A (ja) | 2003-10-23 | 2005-05-19 | Matsushita Electric Works Ltd | 障害物回避機能付き車両 |
| JP5107928B2 (ja) * | 2005-10-24 | 2012-12-26 | シエル・インターナシヨネイル・リサーチ・マーチヤツピイ・ベー・ウイ | 現場熱処理法液体からのアルキル化炭化水素の製造方法 |
| US20070219720A1 (en) * | 2006-03-16 | 2007-09-20 | The Gray Insurance Company | Navigation and control system for autonomous vehicles |
| JP2008186375A (ja) * | 2007-01-31 | 2008-08-14 | Univ Of Tokyo | 物体測定システム |
| US20100053593A1 (en) * | 2008-08-26 | 2010-03-04 | Honeywell International Inc. | Apparatus, systems, and methods for rotating a lidar device to map objects in an environment in three dimensions |
| JP2011196749A (ja) * | 2010-03-18 | 2011-10-06 | Toyota Central R&D Labs Inc | 物体検出装置 |
| JP2013078978A (ja) * | 2011-10-03 | 2013-05-02 | Japan Aerospace Exploration Agency | 航空機搭載レーザ装置用レーザ光反射方法および装置 |
| JP2015535337A (ja) * | 2012-09-14 | 2015-12-10 | ファロ テクノロジーズ インコーポレーテッド | 角度スキャン速度の動的調整を伴うレーザスキャナ |
| US20140233790A1 (en) * | 2013-02-19 | 2014-08-21 | Caterpillar Inc. | Motion estimation systems and methods |
| JP2015081921A (ja) * | 2013-10-21 | 2015-04-27 | ジック アーゲー | 回転軸を中心に運動する走査ユニットを備えるセンサ |
| KR101449931B1 (ko) * | 2013-11-27 | 2014-10-15 | 이대봉 | 라이다용 3차원 공간 스캔장치 |
| KR20160078043A (ko) * | 2014-12-24 | 2016-07-04 | 전자부품연구원 | 2차원 라이더 스캐너의 광학계 및 제어장치 |
| KR20160084084A (ko) * | 2015-01-05 | 2016-07-13 | 한화테크윈 주식회사 | 스캐닝 라이다 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN108603936B (zh) | 2022-04-05 |
| US20190025411A1 (en) | 2019-01-24 |
| TWI764322B (zh) | 2022-05-11 |
| US11187790B2 (en) | 2021-11-30 |
| KR20210152036A (ko) | 2021-12-14 |
| WO2017130770A1 (ja) | 2017-08-03 |
| TW202111384A (zh) | 2021-03-16 |
| KR102460225B1 (ko) | 2022-10-31 |
| EP3407089A1 (en) | 2018-11-28 |
| EP3407089B1 (en) | 2024-03-27 |
| JP6935346B2 (ja) | 2021-09-15 |
| TW201740160A (zh) | 2017-11-16 |
| JPWO2017130770A1 (ja) | 2018-02-22 |
| TWI710798B (zh) | 2020-11-21 |
| JP6301029B2 (ja) | 2018-03-28 |
| KR20200110823A (ko) | 2020-09-25 |
| KR102159376B1 (ko) | 2020-09-23 |
| EP3407089A4 (en) | 2019-11-20 |
| CN108603936A (zh) | 2018-09-28 |
| SG11201806223XA (en) | 2018-08-30 |
| JP2018124283A (ja) | 2018-08-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102159376B1 (ko) | 레이저 스캔 시스템, 레이저 스캔 방법, 이동 레이저 스캔 시스템 및 프로그램 | |
| JP6029446B2 (ja) | 自律飛行ロボット | |
| JP3561473B2 (ja) | 物体位置の追跡・検知方法及びビークル | |
| JP6938846B2 (ja) | 物体認識装置 | |
| JP6777403B2 (ja) | 物体認識装置及びプログラム | |
| JP2020507072A (ja) | 実時間オンライン自己運動推定を備えたレーザスキャナ | |
| EP3656138A1 (en) | Aligning measured signal data with slam localization data and uses thereof | |
| JP2020021326A (ja) | 情報処理方法、情報処理装置およびプログラム | |
| Joe et al. | Sensor fusion of two sonar devices for underwater 3D mapping with an AUV | |
| KR20180044279A (ko) | 깊이 맵 샘플링을 위한 시스템 및 방법 | |
| JP6140458B2 (ja) | 自律移動ロボット | |
| JP6014484B2 (ja) | 自律移動ロボット | |
| JP6758068B2 (ja) | 自律移動ロボット | |
| JP2017068639A (ja) | 自律移動ロボット | |
| CN112313535A (zh) | 距离检测方法、距离检测设备、自主移动平台和存储介质 | |
| CN113433566A (zh) | 地图建构系统以及地图建构方法 | |
| HK1259865A1 (en) | Laser scanning system, laser scanning method, moving laser scanning system, and program | |
| HK1259865B (zh) | 激光扫描系统、激光扫描方法、非暂时性计算机可读存储介质 | |
| JP7649571B1 (ja) | 移動体、及びプログラム | |
| CN120802288A (zh) | 无人机对靶心的精准定位方法、装置、终端及存储介质 | |
| JP2024031992A (ja) | 移動体、及びプログラム | |
| KR20250074601A (ko) | 객체 검출을 위한 방법 및 그 장치 | |
| CN120213079A (zh) | 一种定位精度评估方法及相关装置 | |
| Joung et al. | Two-dimensional depth data measurement using an active omni-directional range sensor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PA0104 | Divisional application for international application |
St.27 status event code: A-0-1-A10-A17-div-PA0104 St.27 status event code: A-0-1-A10-A16-div-PA0104 |
|
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 6 |