KR20170033129A - 판상물용 이송로봇시스템 - Google Patents
판상물용 이송로봇시스템 Download PDFInfo
- Publication number
- KR20170033129A KR20170033129A KR1020150131062A KR20150131062A KR20170033129A KR 20170033129 A KR20170033129 A KR 20170033129A KR 1020150131062 A KR1020150131062 A KR 1020150131062A KR 20150131062 A KR20150131062 A KR 20150131062A KR 20170033129 A KR20170033129 A KR 20170033129A
- Authority
- KR
- South Korea
- Prior art keywords
- robot
- plate
- coupled
- suction
- fixed
- Prior art date
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G49/00—Conveying systems characterised by their application for specified purposes not otherwise provided for
- B65G49/05—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles
- B65G49/06—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles for fragile sheets, e.g. glass
- B65G49/061—Lifting, gripping, or carrying means, for one or more sheets forming independent means of transport, e.g. suction cups, transport frames
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/06—Gripping heads and other end effectors with vacuum or magnetic holding means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B35/00—Supplying, feeding, arranging or orientating articles to be packaged
- B65B35/10—Feeding, e.g. conveying, single articles
- B65B35/16—Feeding, e.g. conveying, single articles by grippers
- B65B35/18—Feeding, e.g. conveying, single articles by grippers by suction-operated grippers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/74—Feeding, transfer, or discharging devices of particular kinds or types
- B65G47/90—Devices for picking-up and depositing articles or materials
- B65G47/91—Devices for picking-up and depositing articles or materials incorporating pneumatic, e.g. suction, grippers
- B65G47/912—Devices for picking-up and depositing articles or materials incorporating pneumatic, e.g. suction, grippers provided with drive systems with rectilinear movements only
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G49/00—Conveying systems characterised by their application for specified purposes not otherwise provided for
- B65G49/05—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles
- B65G49/06—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles for fragile sheets, e.g. glass
- B65G49/063—Transporting devices for sheet glass
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2249/00—Aspects relating to conveying systems for the manufacture of fragile sheets
- B65G2249/04—Arrangements of vacuum systems or suction cups
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Manipulator (AREA)
Abstract
본 발명은 중대형 평판디스플레이를 제조 및 이송, 검사하는 라인에 적용하는 것은 물론이고, 다양한 구성의 판상물을 포장용 박스 등에 투입하거나 또는 투입되어 있는 판상물을 인출하는 용도로 사용될 수 있는 판상물 이송로봇시스템에 관한 것으로서, 크기가 다른 중대형의 판상물을 흡착식으로 안전하게 이송할 수 있음은 물론이고, 얼라인수단을 통해서 판상물을 정위치에 투입할 수 있는 기능성도 함께 제공할 수 있도록 한 판상물 이송로봇시스템을 제공코자 하는 것이다.
즉, 본 발명은 지지체에 설치된 X축 이동용 직선로봇 및 X축 이동용 LM가이드에 의해 이동하는 이동부재와; 상기 이동부재에 일체 형성되어 지지체 전방에 위치하는 수직판과 Y축 이동용 LM가이드 및 정역회전하는 모터에 의해 구동하는 볼스크루를 매개로 승강하는 승강브래킷과; 승강브래킷의 하측으로 결합되며, 판상물을 흡착하는 복수의 흡착패드가 장착된 흡착부를 포함하는 구성으로 이루어지되;
상기 흡착부는 승강브래킷에 결합된 흡착부 설치판과; X축 이동용 직선로봇과 평형하도록 흡착부 설치판에 고정되는 복수의 좌우신축용 양방향 직선로봇과; 상기 양방향 직선로봇의 테이블에 결합되어 신축되는 좌우신축용 가변부재와; X축 이동용 직선로봇과 직각으로 배치되어 상기 가변부재의 선단에 고정되는 좌우측흡착패드 고정프레임과; X축 이동용 직선로봇과 직각으로 배치되어 흡착부 설치판에 고정되는 전후신축용 양방향 직선로봇과; 전후신축용 양방향 직선로봇의 테이블에 결합되어 신축되는 전후신축용 가변부재와; 상기 전후신축용 가변부재에 고정되고 양측으로 결합된 신축봉이 흡착패드 고정프레임과 신축용 LM가이드로 연결 구성되는 신축봉 지지용 하우징과; 상기 흡착패드 고정프레임의 바깥쪽과 안쪽에 설치한 복수의 흡착패드와; 상기 신축봉의 선단에 결합되는 흡착패드를 포함하도록 구성한 것이다.
즉, 본 발명은 지지체에 설치된 X축 이동용 직선로봇 및 X축 이동용 LM가이드에 의해 이동하는 이동부재와; 상기 이동부재에 일체 형성되어 지지체 전방에 위치하는 수직판과 Y축 이동용 LM가이드 및 정역회전하는 모터에 의해 구동하는 볼스크루를 매개로 승강하는 승강브래킷과; 승강브래킷의 하측으로 결합되며, 판상물을 흡착하는 복수의 흡착패드가 장착된 흡착부를 포함하는 구성으로 이루어지되;
상기 흡착부는 승강브래킷에 결합된 흡착부 설치판과; X축 이동용 직선로봇과 평형하도록 흡착부 설치판에 고정되는 복수의 좌우신축용 양방향 직선로봇과; 상기 양방향 직선로봇의 테이블에 결합되어 신축되는 좌우신축용 가변부재와; X축 이동용 직선로봇과 직각으로 배치되어 상기 가변부재의 선단에 고정되는 좌우측흡착패드 고정프레임과; X축 이동용 직선로봇과 직각으로 배치되어 흡착부 설치판에 고정되는 전후신축용 양방향 직선로봇과; 전후신축용 양방향 직선로봇의 테이블에 결합되어 신축되는 전후신축용 가변부재와; 상기 전후신축용 가변부재에 고정되고 양측으로 결합된 신축봉이 흡착패드 고정프레임과 신축용 LM가이드로 연결 구성되는 신축봉 지지용 하우징과; 상기 흡착패드 고정프레임의 바깥쪽과 안쪽에 설치한 복수의 흡착패드와; 상기 신축봉의 선단에 결합되는 흡착패드를 포함하도록 구성한 것이다.
Description
본 발명은 중대형 평판디스플레이를 제조 및 이송, 검사하는 라인에 적용하는 것은 물론이고, 다양한 구성의 판상물(흡착패드로 흡착 하능한 판상물)을 포장용 박스 등에 투입하거나 또는 투입되어 있는 판상물을 인출하는 용도로 사용될 수 있는 판상물 이송로봇시스템에 관한 것으로서, 보다 구체적으로는 크기가 다른 중대형의 판상물을 흡착식으로 안전하게 이송할 수 있음은 물론이고, 얼라인수단을 통해서 판상물을 정위치에 투입할 수 있는 기능성도 함께 제공할 수 있도록 한 판상물 이송로봇시스템을 제공코자 하는 것이다.
판상물용 이송로봇시스템은 중대형 평판디스플레이를 제조 및 이송, 검사하는 라인에 적용하는 것은 물론이고, 다양한 구성의 판상물을 포장용 박스 등에 투입하거나 또는 투입되어 있는 판상물을 인출하는 용도로도 사용되고 있다.
일례로 평판 디스플레이용 이송로봇은 이웃 공정의 지그로 이송할 수 있는 행정거리를 갖는 이송수단에 의해 이송되고 승강수단에 의해 승강되는 판상에 다수의 흡착패드를 설치한 구성으로, 이러한 이송로봇을 사용할 경우 불량률이 매우 높은 문제점이 있었다.
즉, 평판 디스플레이를 흡착한 상태에서 상향 이동시키는 승강수단으로 서보모터나 실린더를 사용하였는바, 기체의 외형이 커지고 정밀한 동작 구현이 어려워 흡착패드의 가압상태를 정확하게 유지하지 못함으로 인해 평판 디스플레이를 흡착하는 과정에서의 위치 정밀성이 떨어지므로, 이동 후 수작업에 의해 위치를 교정해야 하는 문제점이 있고, 평판 디스플레이 크기에 따라 복수의 그리퍼 위치를 개별적으로 이동시켜야 하는 바, 그리퍼 조정성이 떨어지고, 조정 불량으로 인해 흡착이 정확하게 이루어지지 않아 평판디스플레이가 파손되며, 그로 인한 검사 애러 등의 문제점이 있었다. 또한 종래 평판 디스플레이용 이송로봇은 평판 디스플레이 크기에 호환성이 떨어져 크기가 다른 여러 종류의 평판 디스플레이 이송이 어려웠다.
이러한 문제점을 해결하기 위한 수단으로 대한민국 공개특허공보(A)10-2007-0013113(2007.01.30.)의 평판 디스플레이용 이송로봇이 제안되고 있으며, 이의 구성은 지지체에 지지되도록 설치되는 이송수단과, 상기 이송수단에 슬라이드 되도록 결합되어 있는 이송테이블에 고정되며 이송수단과 직각방향으로 설치되는 승강수단과, 상기 승강수단에 슬라이드 되도록 결합되어 있는 승강테이블에 설치되는 연결프레임과, 상기 연결프레임의 하측에 설치되는 베이스플레이트와, 상기 베이스플레이트 양측으로 설치되는 흡착패드 설치판 및 수개의 흡착패드와, 상기 각 흡착패드 설치판 가장자리측에 설치되는 복수의 기판흡착수단을 포함하는 것으로서, 이송수단 및 승강수단이 리니어모터 가이드장치로 구성되어 있어 정확하고 신속하게 이송이 가능하여 작업 능률을 높일 수 있으면서도 이송 안전성을 보장할 수 있고, 흡착패드의 위치를 다양하게 변환할 수 있으므로 다양한 규격의 평판 디스플레이를 수용할 수 있는 것이다.
상기한 평판 디스플레이용 이송로봇의 경우 베이스 플레이트 상에서 양측 흡착패드 설치판이 신축되는 구성을 제공하고 있는데, 이러한 구성의 경우 흡착패드 설치판이 커짐에 따라 수평도가 저하되는 문제점이 있어, 중대형 평판디스플레이와 같은 판상물에 적용하는데 한계가 있었다.
또한 판상물을 정위치로 조절할 수 있는 얼라인수단이 없어 판상물을 정위치로 공급하는 데에도 상당한 어려움이 있었다.
이에 본 발명자는 종래 판상물용 이송로봇시스템에서 다양한 크기의 판상물을 적용함에 따른 문제점과, 박스에 투입되는 판상물을 정위치에 투입하기 위한 문제점 등을 일소코자 본 발명을 연구 개발한 것이다.
즉, 본 발명에서는 복수의 흡착패드가 구비되는 흡착부를 구성함에 있어서, 좌우측프레임 사이에 복수의 가변직선로봇을 설치하여 다양한 크기의 판상물에 적용이 가능하게 하며, 또한 수직방향으로 승강되는 승강브래킷과 흡착부를 얼라인수단으로 조립되도록 함으로 해서 판상물의 정위치 정렬이 용이하게 이루어질 수 있도록 하였다.
과제 해결 수단으로 본 발명에서는, 첫째 지지체에 설치된 X축 이동용 직선로봇 및 X축 이동용 LM가이드에 의해 이동하는 이동부재와; 상기 이동부재에 일체 형성되어 지지체 전방에 위치하는 수직판과 Y축 이동용 LM가이드 및 정역회전하는 모터에 의해 구동하는 볼스크루를 매개로 승강하는 승강브래킷과; 승강브래킷의 하측으로 결합되며, 판상물을 흡착하는 복수의 흡착패드가 장착된 흡착부를 포함하는 구성으로 이루어지되;
상기 흡착부는 승강브래킷에 결합된 흡착부 설치판과; X축 이동용 직선로봇과 평형하도록 흡착부 설치판에 고정되는 좌우신축용 양방향 직선로봇과; 상기 양방향 직선로봇의 테이블에 결합되어 신축되는 좌우신축용 가변부재와; X축 이동용 직선로봇과 직각으로 배치되어 상기 가변부재의 선단에 고정되는 좌우측 흡착패드 고정프레임과; X축 이동용 직선로봇과 직각으로 배치되어 흡착부 설치판에 고정되는 전후신축용 양방향 직선로봇과; 전후신축용 양방향 직선로봇의 테이블에 결합되어 신축되는 전후신축용 가변부재와; 상기 전후신축용 가변부재에 고정되고 양측으로 결합된 신축봉이 흡착패드 고정프레임과 신축용 LM가이드로 연결 구성되는 신축봉 지지용 하우징과; 상기 흡착패드 고정프레임의 바깥쪽과 안쪽에 설치한 복수의 흡착패드와; 상기 신축봉의 선단에 결합되는 흡착패드를 포함하도록 구성하였다.
둘째 지지체에 설치된 X축 이동용 직선로봇 및 X축 이동용 LM가이드에 의해 이동하는 이동부재와; 상기 이동부재에 일체 형성되어 지지체 전방에 위치하는 수직판과 Y축 이동용 LM가이드 및 정역회전하는 모터에 의해 구동하는 볼스크루를 매개로 승강하는 승강브래킷과; 승강브래킷의 하측으로 결합되며, 판상물을 흡착하는 복수의 흡착패드가 장착된 흡착부를 포함하는 구성으로 이루어지되;
상기 흡착부는 승강브래킷에 결합된 흡착부 설치판과; X축 이동용 직선로봇과 평형하도록 흡착부 설치판에 고정되는 좌우신축용 양방향 직선로봇과; 상기 양방향 직선로봇의 테이블에 결합되어 신축되는 좌우신축용 가변부재와; X축 이동용 직선로봇과 직각으로 배치되어 상기 가변부재의 선단에 고정되는 좌우측 흡착패드 고정프레임과; 흡착패드 프레임의 양측에 설치되어 가변용 LM가이드에 의해 슬라이드 이동하는 가변 고정프레임과; X축 이동용 직선로봇과 직각으로 배치되어 흡착부 설치판에 고정되는 전후신축용 양방향 직선로봇과; 전후신축용 양방향 직선로봇의 테이블에 결합되어 신축되는 전후신축용 가변부재와; 상기 전후신축용 가변부재에 고정되고 양측으로 결합된 신축봉이 흡착패드 고정프레임에 슬라이드 이동하도록 설치한 가변 고정프레임에 연결 구성되는 신축봉지지용 하우징과; 상기 흡착패드 고정프레임의 바깥쪽과 안쪽에 설치한 복수의 흡착패드와; 상기 신축봉의 선단에 결합되는 흡착패드를 포함하도록 구성하였다.
셋째 상기 흡착부 설치판의 하측으로는 좌우신축용 양방향 직선로봇과 나란하도록 복수의 가이드부재 및 가이드부재에 결합되어 신축되는 신축가이드부재를 마련하여, 상기 좌우신축용 양방향 직선로봇 및 좌우신축용 가변부재와 연동하여 작동될 수 있도록 하였다.
넷째 상기 흡착패드 고정프레임의 바깥쪽과 안쪽에 설치한 복수의 흡착패드는, 흡착패드 고정프레임에 고정된 레일을 따라서 이동하는 흡착패드 고정구에 고정볼트를 조립하여 임의의 위치에서 고정할 수 있도록 하였다.
다섯째 상기 승강브래킷과 흡착부 설치판의 결합은 얼라인수단에 의해 이루어지며; 상기 얼라인수단은 흡착부 설치판에 결합되는 크로스베어링과, 승강브래킷의 수평설치판 상측으로 X축 이동용 직선로봇과 직각으로 배치되는 전후이동용 LM가이드로 조립되며 하측으로 크로스베어링에 결합되는 결합구를 갖는 이동판과, 승강브래킷에 베어링 지지되도록 설치되고 구동모터에 의해 회전하며 이동판과 조립되는 볼스크루를 포함하는 전후이동수단과;
승강브래킷의 바깥쪽에 위치하도록 볼스크루의 축방향으로 흡착부 설치판에 고정한 회전용 직선로봇과, 회전용 직선로봇의 테이블과 베어링으로 결합되는 회동판과, 회동판과 회동용 LM가이드로 조립되며, 승강브래킷의 측벽에 형성된 작동공으로 내입되는 회동작동구를 포함하는 구성의 회동수단에 의해 구성되도록 하였다.
여섯째 상기 흡착패드 고정프레임에 설치된 복수의 흡착패드와, 신축봉의 선단에 결합되는 흡착패드는 판상물이 내입되는 박스의 깊이보다 길게 형성하였다.
본 발명에서 제공하는 판상물용 이송로봇시스템을 사용할 경우 하기와 같은 효과가 있다.
-흡착부의 구성이 전후방향 및 좌우 방향으로 가변되도록 구성되므로 다양한 규격의 판상물에 적용할 수 있다.
-승강브래킷과 흡착부가 얼라인수단에 의해 결합되므로 판상물을 흡착한 상태에서 전후 이동 및 회동하는 방법으로 교정하여 정확하게 공급할 수 있다.
-흡착패드 고정프레임에 설치된 복수의 흡착패드와, 신축봉의 선단에 결합되는 흡착패드는 판상물이 내입되는 박스의 깊이보다 길게 형성되므로, 작은 판상물을 위해 흡착부를 축소한 상태에서 판상물을 박스에 내입할 때에도 흡착패드 고정프레임이 박스에 부딪히지 않아 판상물의 안전한 공급이 가능하다.
-흡착패드 고정프레임이 복수의 좌우신축용 양방향 직선로봇과 신축봉지지용 하우징에 조립된 신축봉에 의해 결합되므로 흡착패드 고정프레임의 수평도를 유지할 수 있어 판상물의 정밀한 이송이 가능하게 된다.
-흡착패드 프레임의 양측에 가변 고정프레임이 결합되는 구성이므로 판상물을 박스에 내입할 때에도 흡착패드 고정프레임을 박스에 내입 형태로 제공할 수 있어 판상물의 안전한 공급이 가능하다.
도 1은 본 발명에서 제공하는 판상물용 이송로봇시스템의 바람직한 일 실시례를 보인 외형 사시도
도 2는 본 발명에서 제공하는 판상물용 이송로봇시스템의 정면도
도 3은 본 발명에서 제공하는 판상물용 이송로봇시스템의 측면도
도 4는 본 발명에서 제공하는 판상물용 이송로봇시스템의 평면도
도 5는 본 발명에 적용된 흡착패드 고정프레임의 구성 예를 보인 사시도
도 6은 도 5의 정면도
도 7은 도 5의 평면도
도 8은 본 발명에 적용될 수 있는 흡착패드 고정프레임의 다른 예를 보인 요부 발췌 사시도
도 9는 도 8의 평면도
도 10은 본 발명에 적용된 얼라인수단에서 전후이동수단의 구성을 보이기 위한 분해사시도
도 11은 본 발명에 적용된 얼라인수단에서 회동수단의 구성을 보이기 위한 분해사시도
도 112는 본 발명에 적용된 얼라인수단의 작동을 보인 평면도
도 2는 본 발명에서 제공하는 판상물용 이송로봇시스템의 정면도
도 3은 본 발명에서 제공하는 판상물용 이송로봇시스템의 측면도
도 4는 본 발명에서 제공하는 판상물용 이송로봇시스템의 평면도
도 5는 본 발명에 적용된 흡착패드 고정프레임의 구성 예를 보인 사시도
도 6은 도 5의 정면도
도 7은 도 5의 평면도
도 8은 본 발명에 적용될 수 있는 흡착패드 고정프레임의 다른 예를 보인 요부 발췌 사시도
도 9는 도 8의 평면도
도 10은 본 발명에 적용된 얼라인수단에서 전후이동수단의 구성을 보이기 위한 분해사시도
도 11은 본 발명에 적용된 얼라인수단에서 회동수단의 구성을 보이기 위한 분해사시도
도 112는 본 발명에 적용된 얼라인수단의 작동을 보인 평면도
이하 본 발명에서 제공하는 판상물용 이송로봇시스템의 바람직한 실시례를 첨부 도면에 의거하여 설명한다.
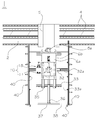
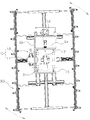
도 1은 본 발명에서 제공하는 판상물용 이송로봇시스템의 바람직한 일 실시례를 보인 외형 사시도를 도시한 것이고, 도 2 내지 도 4는 본 발명에서 제공하는 판상물용 이송로봇시스템의 정면도, 측면도, 평면도를 각각 도시한 것이다.
본 발명에서 제공하는 판상물용 이송로봇시스템(1)은 중대형 평판디스플레이는 물론이고, 다양한 구성의 판상물(100)을 포장용 박스 등에 투입하거나 또는 투입되어 있는 판상물(100)을 인출하는 용도로 사용될 수 있도록 한 것이다.
이를 위한 구성으로 본 발명에서는 도시된 바와 같이 지지체(2)의 상측으로 X축 이동용 직선로봇(3)을 설치하고, X축 이동용 직선로봇(3)의 양측으로는 X축 이동용 직선로봇(3)과 나란하도록 X축 이동용 LM가이드(4)의 레일을 지지체(2)에 고정 설치한다.
상기 X축 이동용 직선로봇(3)의 테이블에는 이동부재(5)를 설치하고, 이동부재(5)의 하측에는 상기 X축 이동용 LM가이드(4)의 레일에 결합되는 블록을 고정하여 이동부재(5)에 고하중이 제공되더라도 안전하게 슬라이드 이동되게 한다.
상기 이동부재(5)에는 지지체(2)의 전방에 위치되도록 수직판(5a)을 형성하고, 이 수직판(5a)에 승강브래킷(6)을 설치한다. 이동부재(5)를 구성하고 있는 수직판(5a)과 승강브래킷(6)은 Y축 이동용 LM가이드(7)를 매개로 설치되며, 바람직하기로는 지지체(2)의 전방으로 절곡된 수직판(5a)에 레일을 고정하고, 승강브래킷(6)에 블록을 고정한 예가 제안될 수 있다. 또한 이동부재(5)에는 정역회전하는 모터(8a)에 의해 구동하는 볼스크루(8)를 베어링 지지되게 설치하고, 볼스크루(8)에 승강브래킷(6)과 결합된 너트부재(9)를 결하하여 승강브래킷(6)이 Y축으로 이동될 수 있게 한다.
상기 승강브래킷(6)은 수평설치판(6a)을 수평방향으로 마련하며, 상기 수평설치판(6a)의 하측으로는 수평설치판(6a)에 결합되는 얼라인수단(10)에 의해 전후 이동 및 회동이 될 수 있도록 흡착부(30)를 설치한다.
상기 흡착부(30)는 승강브래킷(6)의 수평설치판(6a)과 얼라인수단(10)으로 결합된 흡착부 설치판(31)을 마련하고, 흡착부 설치판(31)의 하측으로는 X축 이동용 직선로봇(3)과 평형하도록 좌우신축용 양방향 직선로봇(32)을 고정한다.
상기 좌우신축용 양방향 직선로봇(32)의 테이블에는 좌우신축용 가변부재(32a)를 결합하여 좌우신축용 양방향 직선로봇(32)의 작동에 의해 좌우 신축되도록 하고, 좌우신축용 가변부재(32a)의 선단에는 X축 이동용 직선로봇(3)과 직각으로 배치되는 좌우측으로 흡착패드 고정프레임(34)을 고정한다. 이때 흡착부 설치판(31)의 하측으로는 좌우신축용 양방향 직선로봇(32)과 나란하도록 복수의 가이드부재(33) 및 가이드부재(33)에 결합되어 신축되는 신축가이드부재(33a)를 마련하여 상기 좌우신축용 양방향 직선로봇(32) 및 좌우신축용 가변부재(32a)와 연동하여 작동될 수 있도록 한다.
그리고 X축 이동용 직선로봇(3)과 직각으로 배치되는 전후신축용 양방향 직선로봇(35)에는 흡착부 설치판(31)에 고정하고, 전후신축용 양방향 직선로봇(35)의 테이블에는 전후신축용 가변부재(36)를 결합하여 가변될 수 있도록 하며, 전후신축용 가변부재(36)에는 신축봉지지용 하우징(37)을 결합하고, 신축봉지지용 하우징(37)에는 선단이 흡착패드 고정프레임(34)에 설치된 신축용 LM가이드(39)과 연결되도록 신축봉(38)을 결합하여 좌우신축용 양방향 직선로봇(32)과 전후신축용 양방향 직선로봇(35)의 작동에 연동하여 작동될 수 있도록 한다.
한편 상기 흡착패드 고정프레임(34)의 바깥쪽과 안쪽에는 복수의 흡착패드(40)를 결합하며, 또한 상기 신축봉(38)의 선단에도 흡착패드(40)를 결합토록 한다.
도 5는 본 발명에 적용된 흡착패드 고정프레임의 구성 예를 보인 사시도를 도시한 것이고, 도 6은 도 5의 정면도, 도 7은 도 5의 평면도를 도시한 것이다.
흡착패드 고정프레임(34)의 바깥쪽에 설치한 복수의 흡착패드(40)는, 흡착패드 고정프레임(34)에 고정된 레일을 따라서 이동하는 흡착패드 고정구(41)에 결합되어 있으며, 흡착패드 고정구(41)에는 고정볼트(42)를 조립하여 임의의 위치에서 흡착패드 고정프레임(34)에 흡착패드 고정구(41)를 고정할 수 있도록 하여 다양한 규격의 판상물(100)에 적용이 가능하도록 한다. 즉, 대형 판상물(100)인 경우 흡착패드 고정프레임(34)의 양단부에 적어도 1개의 흡착패드(40)가 위치될 수 있도록 하고, 중형 판상물(100)인 경우 흡착패드 고정프레임(34)의 양단부에 위치한 흡착패드(40)를 판상물(100) 크기에 부합하는 위치로 이동시켜 고정하여 사용토록 한다.
그리고 흡착패드 고정프레임(34)의 안쪽에 설치한 복수의 흡착패드(40)는, 흡착패드 고정프레임(34)에 고정 상태로 있는 흡착패드 고정구(41)에 흡착패드(40)를 고정한다. 이때 고정된 흡착패드(40)의 경우 흡착부(30)로 흡착하는 판상물(100) 중 가장 작은 것에 부합하도록 배치하여 고정하면 된다.
한편 상기 흡착패드 고정프레임(34)에 설치된 복수의 흡착패드(40)와, 신축봉(38)의 선단에 결합되는 흡착패드(40)는 흡착패드 고정프레임(34)의 하측으로 판상물(100)이 내입되는 박스의 깊이보다 길게 형성한다. 이는 중소형 판상물(100)을 박스에 내입할 때 흡착패드 고정프레임(34)이 박스 상부에 위치하는 형상이 되므로 판상물(100)을 박스에 안전하게 내입할 수 있는 기능성을 제공하게 되는 것이다.
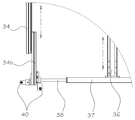
도 8은 본 발명에 적용될 수 있는 흡착패드 고정프레임의 다른 예를 보인 요부 발췌 사시도를 도시한 것이고, 도 9는 도 8의 평면도를 도시한 것이다.
도 8, 도 9에서 제공하는 흡착패드 고정프레임(34)의 경우 중소형 판상물(100)을 박스에 내입할 때 흡착패드 고정프레임(34)이 박스 내부로 내입될 수 있도록 가변되는 구성을 제안한 것이다.
즉, 본 발명에서는 흡착패드 프레임(34)에 가변용 LM가이드(34a)를 설치하고, 가변용 LM가이드(34a)에 가변 고정프레임(34b)을 조립하며, 가변용 고정프레임(34b)의 선단으로 신축봉지지용 하우징(37)에서 인출되도록 조립되어 있는 신축봉(38)을 결합토록 한다.
이러한 구성의 경우 전후신축용 양방향 직선로봇(35)에 의해 신축봉지지용 하우징(37)이 당겨질 때 가변 고정프레임(34b)이 흡착패드 프레임(34)에 설치되어 있는 가변용 LM가이드(34a)을 따라 이동되면서 신축이 이루어지게 되는 바, 박스 내측으로 가변 고정프레임(34b)을 이동시킬 수 있으므로 흡착패드 고정프레임(34)이 박스 내부로 내입된 상태가 되면서 판상물(100)을 박스에 안전하게 내입할 수 있는 기능성을 제공할 수 있게 되는 것이다.
도 10은 본 발명에 적용된 얼라인수단에서 전후이동수단의 구성을 보이기 위한 분해사시도를 도시한 것이고, 도 11은 본 발명에 적용된 얼라인수단에서 회동수단의 구성을 보이기 위한 분해사시도, 도 12는 본 발명에 적용된 얼라인수단의 작동을 보인 평면도를 각각 도시한 것이다.
본 발명에 적용되는 얼라인수단(10)은 크게 전후이동수단(11)과, 회동수단(18)으로 대분되는 구성을 갖는다.
상기 전후이동수단(11)은 흡착부(30)의 흡착부 설치판(31)에 형성된 베어링하우징(31a)에 크로스베어링(12)을 결합하고, 크로스베어링(12)에는 이동판(13)의 하측으로 형성된 결합구(14)를 조립한다. 이때 이동판(13)은 승강브래킷(6)의 수평설치판(6a) 상부에 배치되며, 수평설치판(6a)과 이동판(13) 사이에는 X축 이동용 직선로봇(3)과 직각으로 배치되는 전후이동용 LM가이드(15)을 설치하며, 이동판(13)에는 승강브래킷(6)에 베어링 지지되도록 설치되며 구동모터(16)에 의해 회전하는 볼스크루(17)를 조립하여 이동판(13)을 이동시킬 수 있도록 구성한다.
그리고 상기 회동수단(18)은 승강브래킷(6)의 바깥쪽에 위치하도록, 볼스크루(17)의 축방향으로 흡착부 설치판(31)에 회전용 직선로봇(19)을 고정하고, 회전용 직선로봇(19)의 테이블에는 베어링을 매개로 회동판(20)을 설치한다. 회동판(20)의 상측에는 회동용 LM가이드(21)로 회동작동구(22)를 조립하되, 회동작동구(22)는 승강브래킷(6)의 측벽(6b)에 형성된 작동공(6c)으로 내입되도록 구성한다. 이러한 구성은 회전용 직선로봇(19)을 작동할 때 작동공(6c) 내에 위치하는 회동작동구(22)가 작동공(6c) 내에서 걸림 되는데, 이때 베어링을 매개로 설치되어 있는 회동판(20)이 1차 회동되고, 이어서 크로스베어링(12)을 중심으로 흡착부(30) 전체가 회동되게 되는 것이다.
따라서 본 발명에 적용된 얼라인수단(10)을 사용할 경우 흡착부(30)를 전후 이동과 함께 회동시킬 수 있으므로 판상물(100)을 정위치에 위치하도록 공급할 수 있게 되는 것이다.
이상과 같이 구성되는 본 발명의 판상물용 이송로봇시스템(1)을 이용하여 판상물(100)을 적층시스템 등에 제공코자 할 시에는 먼저 X축 이동용 직선로봇(3)을 이용하여 대상 판상물(100) 상부로 흡착부(30)를 이동시킨 후 상태에서 승강브래킷(6)에 설치되어 있는 모터(8a)를 구동시켜 흡착부(30)를 Y축 방향으로 이동시켜 흡착부(30)에 구비되는 흡착패드(40)로 판상물(100)을 흡착 고정한다.
상기와 같이 판상물(100)을 흡착 고정한 상태에서, 상기와는 역순으로 판상물(100)을 들어 올린 후 X축 이동용 직선로봇(3)을 이용하여 공급처로 이동시킨다. 이때 판상물(100)의 정위치를 확인하는 감지센서(도시되지 않음)등에 의해 감지되고, 얼라인수단(10)에 의해 교정된 흡착부(30)를 Y축 방향으로 이동시켜 안전하게 공급차로 판상물(100)을 공급하면 되는 것이다.
본 발명의 상세한 설명에서는 구체적인 실시례에 관해 설명하고 있으나, 본 발명의 범주에서 벗어나지 않는 한도 내에서 다양한 변형이 가능함은 물론이다. 그러므로 본 발명의 보호 범위는 설명된 실시례에 국한되어 정해져서는 안 되며, 후술하는 청구범위 뿐만 아니라 균등한 것들에 의해 정해져야 한다.
1:판상물용 이송로봇시스템 2:지지체
3:X축 이동용 직선로봇 4:X축 이동용 LM가이드
5:이동부재 5a:수직판
6:승강브래킷 6a:수평설치판
6b:측벽 6c:작동공
7:Y축 이동용 LM가이드 8:볼스크루
8a:모터 9:너트부재
10:얼라인수단 11:전후이동수단
12:크로스베어링 13:이동판
14:결합구 15:전후이동용 LM가이드
16:구동모터 17:볼스크루
18:회동수단 19:회전용 직선로봇
20:회동판 21:회동용 LM가이드
22:회동작동구 30:흡착부
31:흡착부 설치판 31a:베어링하우징
32:좌우신축용 양방향 직선로봇 32a:좌우신축용 가변부재
33:가이드부재 33a:신축가이드부재
34:흡착패드 고정프레임 34a:가변용 LM가이드
34b:가변 고정프레임 35:전후신축용 양방향 직선로봇
36:전후신축용 가변부재 37:신축봉지지용 하우징
38:신축봉 39:신축용 LM가이드
40:흡착패드 41:흡착패드 고정구
42:고정볼트 100:판상물
3:X축 이동용 직선로봇 4:X축 이동용 LM가이드
5:이동부재 5a:수직판
6:승강브래킷 6a:수평설치판
6b:측벽 6c:작동공
7:Y축 이동용 LM가이드 8:볼스크루
8a:모터 9:너트부재
10:얼라인수단 11:전후이동수단
12:크로스베어링 13:이동판
14:결합구 15:전후이동용 LM가이드
16:구동모터 17:볼스크루
18:회동수단 19:회전용 직선로봇
20:회동판 21:회동용 LM가이드
22:회동작동구 30:흡착부
31:흡착부 설치판 31a:베어링하우징
32:좌우신축용 양방향 직선로봇 32a:좌우신축용 가변부재
33:가이드부재 33a:신축가이드부재
34:흡착패드 고정프레임 34a:가변용 LM가이드
34b:가변 고정프레임 35:전후신축용 양방향 직선로봇
36:전후신축용 가변부재 37:신축봉지지용 하우징
38:신축봉 39:신축용 LM가이드
40:흡착패드 41:흡착패드 고정구
42:고정볼트 100:판상물
Claims (6)
- 지지체(2)에 설치된 X축 이동용 직선로봇(3) 및 X축 이동용 LM가이드(4)에 의해 이동하는 이동부재(5)와; 상기 이동부재(5)에 일체 형성되어 지지체(2) 전방에 위치하는 수직판(5a)과 Y축 이동용 LM가이드(7) 및 정역회전하는 모터(8)에 의해 구동하는 볼스크루(9)를 매개로 승강하는 승강브래킷(6)과; 승강브래킷(6)의 하측으로 결합되며, 판상물(100)을 흡착하는 복수의 흡착패드(40)가 장착된 흡착부(30)를 포함하는 구성으로 이루어지되;
상기 흡착부(30)는 승강브래킷(6)에 결합된 흡착부 설치판(31)과;
X축 이동용 직선로봇(3)과 평형하도록 흡착부 설치판(31)에 고정되는 좌우신축용 양방향 직선로봇(32)과;
상기 좌우신축용 양방향 직선로봇(32)의 테이블에 결합되어 신축되는 좌우신축용 가변부재(32a)와;
X축 이동용 직선로봇(3)과 직각으로 배치되어 상기 좌우신축용 가변부재(32a)의 선단에 고정되는 흡착패드 고정프레임(34)과;
X축 이동용 직선로봇(3)과 직각으로 배치되어 흡착부 설치판(31)에 고정되는 전후신축용 양방향 직선로봇(35)과;
전후신축용 양방향 직선로봇(35)의 테이블에 결합되어 신축되는 전후신축용 가변부재(36)와;
상기 전후신축용 가변부재(36)에 고정되고 양측으로 결합된 신축봉(38)이 흡착패드 고정프레임(34)과 신축용 LM가이드(39)로 연결 구성되는 신축봉지지용 하우징(37)과;
상기 흡착패드 고정프레임(34)의 바깥쪽과 안쪽에 설치한 복수의 흡착패드(40)와;
상기 신축봉(38)의 선단에 결합되는 흡착패드(40)를 포함하도록 구성한 것을 특징으로 하는 판상물용 이송로봇시스템.
- 지지체(2)에 설치된 X축 이동용 직선로봇(3) 및 X축 이동용 LM가이드(4)에 의해 이동하는 이동부재(5)와; 상기 이동부재(5)에 일체 형성되어 지지체(2) 전방에 위치하는 수직판(5a)과 Y축 이동용 LM가이드(7) 및 정역회전하는 모터(8)에 의해 구동하는 볼스크루(9)를 매개로 승강하는 승강브래킷(6)과; 승강브래킷(6)의 하측으로 결합되며, 판상물(100)을 흡착하는 복수의 흡착패드(40)가 장착된 흡착부(30)를 포함하는 구성으로 이루어지되;
상기 흡착부(30)는 승강브래킷(6)에 결합된 흡착부 설치판(31)과;
X축 이동용 직선로봇(3)과 평형하도록 흡착부 설치판(31)에 고정되는 좌우신축용 양방향 직선로봇(32)과;
상기 좌우신축용 양방향 직선로봇(32)의 테이블에 결합되어 신축되는 좌우신축용 가변부재(32a)와;
X축 이동용 직선로봇(3)과 직각으로 배치되어 상기 좌우신축용 가변부재(32a)의 선단에 고정되는 흡착패드 고정프레임(34)과;
흡착패드 프레임(34)의 양측에 설치되어 가변용 LM가이드(34a)에 의해 슬라이드 이동하는 가변 고정프레임(34b)과;
X축 이동용 직선로봇(3)과 직각으로 배치되어 흡착부 설치판(31)에 고정되는 전후신축용 양방향 직선로봇(35)과;
전후신축용 양방향 직선로봇(35)의 테이블에 결합되어 신축되는 전후신축용 가변부재(36)와;
상기 전후신축용 가변부재(36)에 고정되고 양측으로 결합된 신축봉(38)이 흡착패드 고정프레임(34)에 슬라이드 이동하도록 설치한 가변 고정프레임(34b)에 연결 구성되는 신축봉지지용 하우징(37)과;
상기 흡착패드 고정프레임(34)의 바깥쪽과 안쪽에 설치한 복수의 흡착패드(40)와;
상기 신축봉(38)의 선단에 결합되는 흡착패드(40)를 포함하도록 구성한 것을 특징으로 하는 판상물용 이송로봇시스템.
- 청구항 1 또는 청구항 2에 있어서;
상기 흡착부 설치판(31)의 하측으로는 좌우신축용 양방향 직선로봇(32)가 나란하도록 복수의 가이드부재(33) 및 가이드부재(33)에 결합되어 신축되는 신축가이드부재(33a)를 마련하여 상기 좌우신축용 양방향 직선로봇(32) 및 좌우신축용 가변부재(32a)와 연동하여 작동될 수 있도록 한 것을 특징으로 하는 판상물용 이송로봇시스템.
- 청구항 1 또는 청구항 2에 있어서;
상기 흡착패드 고정프레임(34)의 바깥쪽에 설치한 복수의 흡착패드(40)는, 흡착패드 고정프레임(34)에 고정된 레일을 따라서 이동하는 흡착패드 고정구(41)에 고정볼트(42)를 조립하여 임의의 위치에서 고정할 수 있도록 한 것을 특징으로 하는 판상물용 이송로봇시스템.
- 청구항 1 또는 청구항 2에 있어서;
상기 승강브래킷(6)과 흡착부 설치판(31)의 결합은 얼라인수단(10)에 의해 이루어지며;
상기 얼라인수단(10)은 흡착부 설치판(31)에 결합되는 크로스베어링(12)과, 승강브래킷(6)의 수평설치판(6a) 상측으로 X축 이동용 직선로봇(3)과 직각으로 배치되는 전후이동용 LM가이드(15)로 조립되며, 하측으로 크로스베어링(12)에 결합되는 결합구(14)를 갖는 이동판(13)과, 승강브래킷(6)에 베어링 지지되도록 설치되고 구동모터(16)에 의해 회전하며 이동판(13)과 조립되는 볼스크루(17)를 포함하는 전후이동수단(11)과;
승강브래킷(6)의 바깥쪽에 위치하도록 볼스크루(17)의 축방향으로 흡착부 설치판(31)에 고정한 회전용 직선로봇(19)과, 회전용 직선로봇(19)의 테이블과 베어링으로 결합되는 회동판(20)과, 회동판(20)과 회동용 LM가이드(21)로 조립되며, 승강브래킷(6)의 측벽(6b)에 형성된 작동공(6c)으로 내입되는 회동작동구(22)를 포함하는 구성의 회동수단(18)에 의해 구성되도록 한 것을 특징으로 하는 판상물용 이송로봇시스템.
- 청구항 1에 있어서;
상기 흡착패드 고정프레임(34)에 설치된 복수의 흡착패드(40)와, 신축봉(38)의 선단에 결합되는 흡착패드(40)는 판상물(100)이 내입되는 박스의 깊이보다 길게 형성한 것을 특징으로 하는 판상물용 이송로봇시스템.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150131062A KR101774828B1 (ko) | 2015-09-16 | 2015-09-16 | 판상물용 이송로봇시스템 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150131062A KR101774828B1 (ko) | 2015-09-16 | 2015-09-16 | 판상물용 이송로봇시스템 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170033129A true KR20170033129A (ko) | 2017-03-24 |
| KR101774828B1 KR101774828B1 (ko) | 2017-09-05 |
Family
ID=58500562
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020150131062A KR101774828B1 (ko) | 2015-09-16 | 2015-09-16 | 판상물용 이송로봇시스템 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101774828B1 (ko) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019147096A1 (ko) * | 2018-01-29 | 2019-08-01 | 주식회사 테라젠테크 | 수평수직 방향전환 및 정렬 기능을 갖는 유리기판 이송장치 |
| KR20200104953A (ko) * | 2019-02-27 | 2020-09-07 | (주)대봉기연 | 프레스 라인용 소재 이송 장치 |
| WO2021139417A1 (zh) * | 2020-01-07 | 2021-07-15 | 江苏宏芯亿泰智能装备有限公司 | 用于显示面板宏观检测装置的取送料机构和显示面板宏观检测装置 |
| KR102291935B1 (ko) * | 2020-04-23 | 2021-08-23 | (주)대성사 | 철판 이송용 진공 흡착장치 |
| KR20210123115A (ko) * | 2020-04-02 | 2021-10-13 | 주식회사 제이스텍 | 흡착위치 및 크기조절가변이 가능한 디스플레이 패널 흡착장치 |
| KR20220028722A (ko) * | 2020-08-31 | 2022-03-08 | (주)대봉기연 | 프레스 라인용 고속 트랜스퍼 |
| KR102383954B1 (ko) * | 2021-12-09 | 2022-04-08 | 웍스탭 주식회사 | 폭 조절이 가능한 지그 장치 |
| CN115231192A (zh) * | 2022-06-25 | 2022-10-25 | 深圳市优达智控技术有限公司 | 一种基于伺服模组的新能源电池抓取及搬运机构 |
| CN116062488A (zh) * | 2023-03-02 | 2023-05-05 | 上海图灵智造机器人有限公司 | 一种移动式码垛机器人及使用方法 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR200497077Y1 (ko) * | 2021-04-02 | 2023-07-20 | 주식회사 스마트터치 | 조립의 편리성이 증대된 대형 전자칠판 조립대 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20070013113A (ko) | 2005-07-25 | 2007-01-30 | 강삼태 | 평판 디스플레이용 이송로봇 |
-
2015
- 2015-09-16 KR KR1020150131062A patent/KR101774828B1/ko active IP Right Grant
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20070013113A (ko) | 2005-07-25 | 2007-01-30 | 강삼태 | 평판 디스플레이용 이송로봇 |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019147096A1 (ko) * | 2018-01-29 | 2019-08-01 | 주식회사 테라젠테크 | 수평수직 방향전환 및 정렬 기능을 갖는 유리기판 이송장치 |
| KR20200104953A (ko) * | 2019-02-27 | 2020-09-07 | (주)대봉기연 | 프레스 라인용 소재 이송 장치 |
| WO2021139417A1 (zh) * | 2020-01-07 | 2021-07-15 | 江苏宏芯亿泰智能装备有限公司 | 用于显示面板宏观检测装置的取送料机构和显示面板宏观检测装置 |
| KR20210123115A (ko) * | 2020-04-02 | 2021-10-13 | 주식회사 제이스텍 | 흡착위치 및 크기조절가변이 가능한 디스플레이 패널 흡착장치 |
| KR102291935B1 (ko) * | 2020-04-23 | 2021-08-23 | (주)대성사 | 철판 이송용 진공 흡착장치 |
| KR20220028722A (ko) * | 2020-08-31 | 2022-03-08 | (주)대봉기연 | 프레스 라인용 고속 트랜스퍼 |
| KR102383954B1 (ko) * | 2021-12-09 | 2022-04-08 | 웍스탭 주식회사 | 폭 조절이 가능한 지그 장치 |
| CN115231192A (zh) * | 2022-06-25 | 2022-10-25 | 深圳市优达智控技术有限公司 | 一种基于伺服模组的新能源电池抓取及搬运机构 |
| CN116062488A (zh) * | 2023-03-02 | 2023-05-05 | 上海图灵智造机器人有限公司 | 一种移动式码垛机器人及使用方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101774828B1 (ko) | 2017-09-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101774828B1 (ko) | 판상물용 이송로봇시스템 | |
| JP5916137B2 (ja) | ワーク搬入装置 | |
| RU2102239C1 (ru) | Устройство для передачи заготовки от первого станка к второму станку | |
| JP2019147693A (ja) | 物品移送装置、物品検査装置、物品移送方法及び物品検査方法 | |
| US8882431B2 (en) | Substrate transfer robot and substrate transfer system | |
| KR101421351B1 (ko) | 병렬로봇 | |
| KR20110039455A (ko) | 판상 워크의 이송 설비 및 이송 방법 | |
| CN103771113A (zh) | 送料装置 | |
| KR102388699B1 (ko) | 유지보수 장치 | |
| CN104822612A (zh) | 快速运送板材方法及装置 | |
| KR101606223B1 (ko) | 산업용 로보트 | |
| JP2009113186A (ja) | ねじ締付装置 | |
| US20220193929A1 (en) | Holding device and robot provided with same | |
| CN102655979A (zh) | 工件定位装置和方法以及对焊用工件定位装置 | |
| KR20180130739A (ko) | 트랜스퍼 로봇 | |
| KR101691506B1 (ko) | 4주식 베드형 석재 자동 흡착 이송 및 적재장치 | |
| TWI586497B (zh) | Substrate transport arm and substrate transfer method | |
| KR20160115123A (ko) | 진공흡착부와 고자유도 관절을 구비한 하역장비 | |
| US20220088666A1 (en) | Machine tool with working surface defined by orientable suction cups | |
| KR101789117B1 (ko) | 2주식 리프트형 석재 자동 흡착 이송 및 적재장치 | |
| KR101535068B1 (ko) | 틀어짐을 보정하는 8축 이송로봇 | |
| CN112810876A (zh) | 一种紧固件自动化套网工艺 | |
| JP2010155690A (ja) | 方向転換装置 | |
| CN217728721U (zh) | 配送机器人及运输装置 | |
| JP2824892B2 (ja) | ワーク把持装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E701 | Decision to grant or registration of patent right |