KR20160051810A - 변위펌프의 측정 프로필을 개선하기 위한 방법 - Google Patents
변위펌프의 측정 프로필을 개선하기 위한 방법 Download PDFInfo
- Publication number
- KR20160051810A KR20160051810A KR1020167007967A KR20167007967A KR20160051810A KR 20160051810 A KR20160051810 A KR 20160051810A KR 1020167007967 A KR1020167007967 A KR 1020167007967A KR 20167007967 A KR20167007967 A KR 20167007967A KR 20160051810 A KR20160051810 A KR 20160051810A
- Authority
- KR
- South Korea
- Prior art keywords
- pressure
- closed
- displacer element
- measurement
- model
- Prior art date
Links
Images



Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B17/00—Pumps characterised by combination with, or adaptation to, specific driving engines or motors
- F04B17/03—Pumps characterised by combination with, or adaptation to, specific driving engines or motors driven by electric motors
- F04B17/04—Pumps characterised by combination with, or adaptation to, specific driving engines or motors driven by electric motors using solenoids
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B17/00—Pumps characterised by combination with, or adaptation to, specific driving engines or motors
- F04B17/03—Pumps characterised by combination with, or adaptation to, specific driving engines or motors driven by electric motors
- F04B17/04—Pumps characterised by combination with, or adaptation to, specific driving engines or motors driven by electric motors using solenoids
- F04B17/042—Pumps characterised by combination with, or adaptation to, specific driving engines or motors driven by electric motors using solenoids the solenoid motor being separated from the fluid flow
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B43/00—Machines, pumps, or pumping installations having flexible working members
- F04B43/02—Machines, pumps, or pumping installations having flexible working members having plate-like flexible members, e.g. diaphragms
- F04B43/04—Pumps having electric drive
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B49/00—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00
- F04B49/06—Control using electricity
- F04B49/065—Control using electricity and making use of computers
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B17/00—Systems involving the use of models or simulators of said systems
- G05B17/02—Systems involving the use of models or simulators of said systems electric
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B2203/00—Motor parameters
- F04B2203/02—Motor parameters of rotating electric motors
- F04B2203/0201—Current
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B2203/00—Motor parameters
- F04B2203/02—Motor parameters of rotating electric motors
- F04B2203/0202—Voltage
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B2203/00—Motor parameters
- F04B2203/04—Motor parameters of linear electric motors
- F04B2203/0401—Current
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B2203/00—Motor parameters
- F04B2203/04—Motor parameters of linear electric motors
- F04B2203/0402—Voltage
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2210/00—Working fluid
- F05B2210/10—Kind or type
- F05B2210/11—Kind or type liquid, i.e. incompressible
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S417/00—Pumps
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Computer Hardware Design (AREA)
- Fluid Mechanics (AREA)
- Control Of Positive-Displacement Pumps (AREA)
- Electromagnetic Pumps, Or The Like (AREA)
Abstract
본 발명은 이동 가능한 디스플레이서 요소가 측정 챔버의 범위를 결정하는 변위 펌프들의 측정 프로필을 최적화하기 위한 방법에 관한 것으로, 상기 측정 챔버는 밸브들에 의해서 흡입 라인과 압력 라인에 연결되고, 운반 유체는 상기 흡입 라인에 의해서 상기 측정 챔버 내로 교호적으로 흡입될 수 있고, 상기 디스플레이서 요소의 진동운동에 의해서 상기 압력 라인에 의해서 상기 측정 챔버 밖으로 강제 배출될 수 있으며, 상기 디스플레이서 요소의 진동운동을 위한 드라이브가 제공된다. 시스템이 뜻하지 않은 장애에 노출되더라도 제어 매개변수들의 사전 상정없이 압력부분 운동의 제어를 가능하게 하는 본 발명에 따른 방법을 제공하기 위해서, 본 발명에 따른 모델-기반 제어가 드라이브를 위해서 사용된다.
Description
본 발명은 양변위 펌프의 측정 프로필을 개선하기 위한 방법에 관한 것이다.
양변위 펌프들은 밸브들에 의해서 흡입라인과 압력라인에 연결되는 측정챔버의 한계를 정하는 가동 디스플레이서 요소를 갖는다. 그 결과, 운반유체가 디스플레이서 요소의 진동운동에 의해서 흡입라인에 의해 측정챔버 내로 흡입될 수 있고 압력라인에 의해서 측정챔버 밖으로 강제 배출될 수 있다. 디스플레이서 요소의 진동운동을 위한 드라이브가 디스플레이서 요소와 연관된다.
전자기적으로 구동되는 다이아프램 펌프들을 예로 들 수 있는데, 여기에서 상기 디스플레이서 요소는 2개의 말단 위치들 사이에서 왕복할 수 있는 다이아프램이고, 측정챔버의 체적은 제 1 말단위치에서 최소가 되고 제 2 말단위치에서 최대가 된다. 그러므로 만약 다이아프램이 제 1 위치로부터 제 2 위치로 이동하면, 측정챔버 내의 압력은 떨어지고 그래서 운반유체는 흡입라인에 의해서 측정챔버 내로 흡입된다. 복귀운동에 있어서, 즉 제 2 위치로부터 제 1 위치로의 운동에 있어서, 흡입라인에 대한 연결은 폐쇄되고, 운반유체의 압력은 측정챔버에서 체적의 감소에 의해 상승하게 되며, 그래서 압력라인에 대한 밸브가 개방되고 운반유체는 압력라인 내로 운반된다. 운반유체는 흡입라인으로부터 측정챔버 내로 흡입되고 이와는 달리 다이아프램의 진동운동에 의해서 측정챔버로부터 압력라인 내로 운반된다. 압력라인에서 운반유체 흐름은 측정 프로필로서 또한 언급된다. 측정 프로필은 디스플레이서 요소의 운동 프로필에 의해서 실질적으로 결정된다.
전자기적으로 구동되는 다이아프램 펌프들의 경우에 있어서, 다이아프램은 압력부분에 연결되는데, 이것은 대부분의 경우에 있어서 솔레노이드 내에 적어도 부분적으로 탄력있게 항상 압축응력을 받는 방식으로 지지된다. 솔레노이드가 자체를 통해서 유동하는 전류를 갖지 않아서 그 내부에 자기 플럭스가 축적되지 않는 한, 상기 압력부분에 탄력있는 압축응력이 제공되어 다이어프램이 소정위치, 예를 들면 제 2 위치, 다시 말해서 측정챔버가 최대 체적을 갖는 위치에 유지된다.
만약 전류가 솔레노이드에 인가되면, 자기 플럭스가 생성되어 솔레노이드 내에서 적절히 설계된 압력부분을 제 2 위치로부터 제 1 위치로 이동시키고, 이에 의해서 측정챔버 내의 운반유체는 그로부터 압력라인 내로 운반된다.
그러므로, 솔레노이드의 활성화는 압력부분의 스트로크 운동을 갑작스럽게 수반하게 되고 그래서 측정 다이아프램이 제 2 위치로부터 제 1 위치로 이동하게 된다.
통상적으로 그러한 전자기적으로 구동되는 다이아프램 펌프들은 측정될 유체 체적이 측정챔버의 체적보다 상당히 큰 경우에 사용되고, 그래서 측정속도는 솔레노이드를 통한 전류 흐름의 사이클링 또는 주파수에 의해서 필수적으로 결정된다. 만약 예를 들어 측정속도가 2배가 되면, 솔레노이드는 그와 동시에 2배의 전류로 전력을 공급받으며, 이것에 의해서 다이아프램의 운동주기는 2배가 된다.
그러한 자기 측정펌프는 예를 들어 EP 1 757 809에 개시되어 있다.
그러나 그러한 자기 측정펌프들의 사용은 단지 낮은 측정속도만이 필요한 한계에 부딪히게 되는데, 그래서 전체적인 스트로크 운동의 갑작스런 측정 작용은 원하지 않게 된다.
위에서 언급한 EP 1 757 809 B1에서는 압력부분 또는 여기에 연결된 다이아프램의 위치가 결정될 수 있는 위치센서를 제공하는 것을 이미 제안한 바 있다. 운동의 폐-루프 제어는 압력부분의 실제위치와 압력부분의 소정의 목표 위치 사이를 비교하는 것에 의해서 실행될 수 있다.
압력부분의 운동의 폐-루프 제어는 스트로크 운동이 더이상 갑작스럽게 이루어지는 것이 아니라 조절된 방식으로 이루어짐에 따라서 자기 측정 펌프들이 상당히 적은 양의 유체를 운반하기 위해서 사용될 수 있게 한다.
그러나, 실제로는, 적당한 폐-루프 제어 매개변수들을 발견하는 것은 어렵다. 실제로, 다른 폐-루프 제어 매개변수들은 다양한 압력부분의 위치 상태에 대해 경험적으로 결정되어 메모리 수단에 저장되고, 그래서 펌프는 압력부분의 위치에 따라서 대응하는 폐-루프 제어 매개변수들을 상정하여 이용할 수 있다.
그러나, 폐-루프 제어 매개변수들을 결정하는 작동은 매우 힘들다. 또한, 예를 들어 운반유체의 밀도와 점성과 같은 측정챔버에서의 상태에 크게 의존한다.
그러므로, 폐-루프 제어는 시스템이 원하는 상태에 대략적으로 대응할 때만 만족스럽게 기능한다. 특히, 흡입 및/또는 압력 라인에서의 압력 요동에 따라, 공동현상의 발생 시에, 측정챔버 내에서 공기의 수집 또는 운반유체의 점성에서 변화가 일어날 때, 메모리 수단에 저장된 폐-루프 제어 매개변수들은 적당하지 않고, 폐-루프 제어 정확도가 감소하며 그래서 실제적인 측정 프로필은 원하는 측정 프로필과 크게 다르다. 그러나, 예를 들어 음료수의 염소처리에서와 같이 매우 적은 양의 연속적인 측정에서는 특히 바람직하지 않다.
기본적인 출발점으로서 종래기술의 상기한 상태를 고려하여, 본 발명의 목적은 본 명세서의 도입부에서 친절하게 설명한 방법을 제공하기 위한 것으로, 이 방법은 심지어 시스템가 뜻하지 않은 장애에 노출되는 경우에도 폐-루프 제어 매개변수들의 사전 상정함이 없이 압력부의 운동의 폐-루프 제어를 가능하게 한다.
본 발명에 따르면, 본 발명의 목적은 모델-기반 폐-루프 제어, 특히 비-선형 모델-기반 제어가 디스플레이서 요소의 드라이브에 대해서 사용되는 것에 의해 달성된다.
모델-기반 제어의 경우에 있어서, 공정 동특성의 가능성으로 완벽한 모델이 개발되었다. 그 모델에 의해서, 간단히 말하자면, 시스템 변수들이 다음 순간으로 이동하게 되는 것에 대한 예측이 가능해진다.
적당한 조정 매개변수는 그 모델로부터 또한 계산될 수 있다. 그러한 모델-기반 제어의 특징은 상기 모델에 의해서 주어진 시스템 매개변수들을 사용하여 가변적인 측정을 기반하여 필수적인 조정 매개변수들의 계산을 진행하는 것이다.
기본적으로, 기반적인 물리적 시스템은 모델링에 의해서 대략적으로 수학적으로 설명된다. 수학적인 설명은 얻어진 측정 변수들을 기반하여 조정 매개변수들을 계산하기 위해서 사용된다. 알려진 측정 프로필 최적화 모델과는 달리, 그러므로 드라이브는 더이상 "블랙 박스(black box)"로서 보여지지 않는다. 알려진 물리적 관계 대신에 조정 매개변수를 결정하기 위해서 사용된다.
그 방식에 있어서, 아주 양호한 폐-루프 제어 품질을 달성할 수 있다.
비록 상기한 방법은 어느 변위펌프의 측정 프로필을 개선하는데 주로 사용될 수 있을지라도, 동일한 목적을 위해서 개발되었고 바람직한 실시 예를 나타내므로, 전자기적으로 구동되는 다이어프램 펌프들의 측정 프로필에서의 개선과 관련하여 설명된다.
바람직한 실시 예에 있어서, 디스플레이서 요소의 위치와 전자기 드라이브를 통과하는 전류가 측정되고, 모델-기반 폐-루프 제어를 위해서 상태 공간 모델이 사용되는데, 이 모델은 측정 변수들로서 디스플레이서 요소의 위치와 전자기 드라이브의 솔레노이드를 통과하는 전류를 사용한다.
특히 바람직한 실시 예에 있어서, 상태 공간 모델은 탐지될 추가적인 측정변수들을 갖지 않는다. 즉, 상기 모델은 탐지된 압력부분 위치와 상기 솔레노이드를 통과하는 탐지된 전류만을 기반하여 개발되었고, 압력부분의 바로 다음 운동에 대한 예측을 가능하게 한다.
그러한 모델-기반 폐-루프 제어는 예를 들어 위에서 언급한 EP 1 757 809에 개시된 자기 측정 펌프에 대해 저비용으로 실행될 수 있으며, 디스플레이서 요소의 위치 및 상기 솔레노이드를 통과하는 전류를 측정하기 위한 측정시스템를 갖는다.
용어 상태 공간 모델은 상기 시스템의 순간적인 상태의 물리적인 설명을 나타낸다. 예를 들면, 상태 매개변수들은 시스템에 포함된 에너지 저장 요소들의 에너지 함량을 나타낸다.
예를 들면, 모델-기반 폐-루프 제어에 대한 모델로서 디스플레이서 요소에 대해 다른 방정식이 설정될 수 있다. 예를 들면, 다른 방정식은 운동 방정식이 될 수 있다. 용어 운동 방정식은 외부영향의 작용하에서 디스플레이서 요소의 공간적인 운동 및 일시적인 운동을 나타내는 수학적 방정식을 의미하기 위해서 사용된다. 그 점에 있어서, 바람직한 실시 예에서, 양변위 펌프에 대해 특별하고 압력부분에 작용하는 힘들이 운동방정식에서 모델화된다. 그러므로, 예를 들면 스프링에 의해서 압력부분에 발휘되는 힘, 스프링 상수 k, 및/또는 자기 드라이브에 의해서 압력부분에 발휘된 자기 힘이 모델화될 수 있다. 운반유체에 의해서 압력부분에 발휘된 힘은 간섭변수로서 취급될 수 있다.
만약 측정변수들이 탐지된다면, 바로 다음의 시스템 거동에 대한 예측은 그러한 상태 공간 변수에 의해서 이루어질 수 있다.
그러한 방식으로 예측된 바로 다음의 거동이 원하는 소정의 거동으로부터 벗어나면, 이것을 바로잡으려는 영향력이 상기 시스템에 가해진다.
적당한 영향력을 계산하기 위해서, 폐-루프 제어 변수에 대한 유용한 조정 매개변수들의 영향이 동일한 모델에서 시뮬레이션 될 수 있다. 즉각적인 최선의 제어 전략이 공지된 최적 방법들에 의해서 적합하게 선택될 수 있다. 그것에 대한 대안으로서, 단 한번의 제어 전략을 결정하고 다음에는 탐지된 측정변수들에 따라 그것을 적용하기 위해서 상기 모델을 기반하는 것이 또한 가능하다.
바람직한 실시 예에 있어서, 그러므로 비-선형 상태 공간모델이 상태 공간 모델로서 선택되고, 비-선형 폐-루프 제어는, 제어-리아프노프 함수들에 의해서, 평탄-기반 사전적 통제에 따른 평탄-기반 폐-루프 제어 방법들에 의해서, 적분형 백스텝핑법(integrator backstepping methods)에 의해서, 슬라이딩 모드 방법에 의해서 또는 예측적인 폐-루프 제어에 의해서 실행된다. 그 경우에 있어서, 제어-리아프노프 함수들에 의한 비-선형 폐-루프 제어가 바람직하다.
모든 5가지 방법들은 수학으로부터 알려져 있고, 따라서 여기에서는 상세하게 설명하지 않는다.
제어-리아프노프 함수들은 예를 들면 리아프노프 함수들의 일반화된 설명이다. 적당하게 선택된 제어-리아프노프 함수들은 모델의 맥락에서 안정한 거동을 초래한다.
다시 말해서, 교정 함수가 계산되는데, 기본적 모델은 상기 모델에 대한 안정한 솔루션을 초래한다.
일반적으로, 실제 프로필과 타겟 프로필간 차이를 낳는 다수의 제어 옵션들은 기본 모델에서 작아진다.
바람직한 실시 예에 있어서, 모델-기반 폐-루프 제어에 대해 기반를 형성하는 모델은 최적화와 관련하여 2차 조건으로서 최적화 문제를 체계화하기 위해서 사용되는데, 전기 모터에서의 전압 및 측정 펌프에 공급된 에너지는 가능한한 작고, 이와 동시에 가능한한 빠르고 작은 초과를 갖는 타겟 프로필에 대한 실제 프로필의 근사치가 달성된다. 또한, 노이즈의 영향을 줄이기 위해서 측정된 신호들이 기반 모델에서의 처리 전에 저역 통과 필터링을 받는 것이 바람직하다.
특히 바람직한 실시 예에 있어서, 흡입-압력 사이클 동안에 디스플레이서 요소의 탐지된 실제 위치 프로필과 디스플레이서 요소의 원하는 목표 위치 프로필 사이의 차이가 탐지되고, 상기 차이에 의해서 감소된 원하는 목표 위치 프로필은 다음의 흡입-압력 사이클을 위해서 사용된다.
기본적으로, 자체-학습 시스템이 여기에서 실행된다. 인정하건대, 본 발명에 따른 모델-기반 폐-루프 제어는 제어 특징에서 두드러진 개선을 이미 유발했고, 그럼에도 불구하고 타겟 프로필과 실제 프로필 사이에 편차가 발생할 수 있다. 특히 제어 중재의 에너지-최소화 선택에 있어서 회피하지 않는다. 적어도 다음 사이클들에 대하여 편차를 줄이기 위해서, 사이클 동안의 편차가 탐지되고, 탐지된 편차는 다음 사이클에서 원하는 목표 위치 프로필로부터 적어도 부분적으로 차감된다.
다시 말해서, "거짓" 목표값 프로필은 다음의 압력-흡입 사이클에 대하여 의도적으로 미리 결정되고, 여기에서 “거짓” 목표값 프로필은 선행하는 사이클에서 획득한 경험으로부터 계산된다. 만약 보다 특별하게, 다음의 흡입-압력 사이클이 선행하는 사이클에서와 같이 실제와 타겟 프로필 사이에서 정확히 동일한 편차를 수반하면, "거짓” 목표값 프로필의 사용은 실제로 원하는 목표값 프로필이 결과로서 달성되는 결과를 갖는다.
인정하건대, 그것은 기본적으로 가능하고, 몇몇 응용에서 시스템의 주기적인 거동에 의해서 기설명된 자체-학습 단계가 한번에 수행되기에 충분하며, 다시 말해서, 첫번째 사이클에서 측정될 차이 및 2차 사이클과 모든 후속 사이클로부터 대략적으로 보정될 목표값 프로필에 대하여 충분하다. 실제 프로필과 타겟 프로필 사이의 차이가 규칙적인 인터벌로 결정되는 것이 특히 바람직하고, 각각의 사이클에서 가장 바람직하며, 그에 대응하여 후속 사이클에서 고려된다.
후속 사이클이나 사이클들에 대한 프로필 보정으로서 탐지된 차이의 일부만을 사용하는 것이 가능함을 알 수 있을 것이다. 목표값에서의 갑작스런 변화로 인하여 시스템의 불안정성을 만들지 않기 위해서, 탐지된 차이가 매우 큰 상황이 바람직할 수 있다.
또한, 타겟 프로필과 실제 프로필 사이에서 현재 우세한 차이를 기반하여 프로필 보정으로서 사용되는 탐지된 차이의 일부 크기를 결정하는 것이 가능하다.
다수의 사이클에 걸쳐서 측정될 실제 프로필과 타겟 프로필 사이의 차이에 대해, 그것으로부터 계산될 평균 차이는 예를 들면 2이고, 다음의 사이클들의 타겟 프로필로부터 적어도 부분적으로 차감된다.
대안적인 실시 예에 있어서, 탐지된 차이에 따른 어느 함수가 다음 목표 위치 프로필의 보정을 위해서 사용될 수 있다. 본 발명에 따른 모델링은 변위펌프에서 물리적인 변수를 결정하기 위해 다른 바람직한 실시 예에서 사용될 수 있다. 예를 들면 측정 챔버에서 유체압력은 그 방식으로 결정될 수 있다.
디스플레이서 요소의 운동 방정식은 디스플레이서 요소에 작용하는 모든 힘을 고려한다. 드라이브에 의해서 디스플레이서 요소에 작용하는 힘 이외에, 다이어프램에 대항력이 작용하고, 그러므로 측정 챔버에서 유체 압력이 디스플레이서 요소에 작용한다.
그러므로, 만약 드라이브에 의해서 디스플레이서 요소에 작용하는 힘이 알려져 있으면, 측정 헤드에서 유체 압력에 대한 결론이 디스플레이서 요소의 위치 또는 속도로부터 추론될 수 있는데, 이때 속도는 그로부터 또는 디스플레이서 요소의 가속으로부터 추론될 수 있다.
예를 들면, 만약 실제 유체 압력이 소정의 최대값에 도달하거나 이를 초과하면, 경고신호가 출력될 수 있고, 경고신호는 경고신호의 수신에 반응하여 측정 펌프를 작동중단시키는 자동 작동중단장치로 보내질 수 있다. 만약 그러므로 어느 이유로 밸브가 열리지 않거나 또는 압력 라인의 압력이 크게 상승하면, 이것은 압력센서를 사용함이 없이 본 발명에 따른 방법에 의해서 확인될 수 있고, 펌프는 안전을 위해서 작동중단될 수 있다. 기본적으로, 연관된 드라이브와 함께 디스플레이서 요소는 압력센서의 기능을 추가적으로 수행한다.
디스플레이서 요소의 운동 사이클에 대한 방법의 바람직한 실시 예에 있어서, 타겟 유체 압력곡선, 디스플레이서 요소의 타겟 위치 곡선 및/또는 전자기 드라이브를 통한 타겟 전류 패턴이 저장된다. 그 경우에 있어서, 실제 유체 압력은 타겟 유체 압력에 비교될 수 있고, 디스플레이서 요소의 실제 위치는 디스플레이서 요소의 타겟 위치에 비교될 수 있고 및/또는 전자기 드라이브를 통한 실제 전류는 전자기 드라이브를 통한 타겟 전류에 비교될 수 있으며, 만약 실제 값과 목표값 사이의 차이가 소정의 기준을 만족시키면 경고신호가 출력될 수 있다.
상기 방법은 예를 들면 유압 시스템에서 기포들 또는 펌프 헤드에서의 공동과 같은 주어진 사건들이 예상될 유체 압력에서의 인식 가능한 변화를 야기하는 옵션에 기반하고, 그러므로 상기 사건들에 대한 결론들이 유체 압력의 결정 작동으로부터 얻어질 수 있다.
경고신호는 예를 들면 광학적 디스플레이나 음향 디스플레이를 활성화시킬 수 있다. 교호적으로 또는 그것과 결합하여, 경고신호는 경고신호의 수신에 반응하여 적당한 측정을 수행하는 제어 유닛에 대하여 직접적으로 유용하게 생성될 수 있다.
단순한 경우에 있어서, 실제값과 목표값들 사이의 차이는 하나 또는 그 이상의 측정된 또는 주어진 변수들에 대해 결정되고, 만약 그 차이들 중 하나가 소정 값을 초과하는 경우에 경고신호가 출력된다.
예를 들어 측정챔버내의 기포들 또는 공동의 발생과 같은 가능한 실패 사건들을 탐지하는것 뿐만아니라 그것들을 서로 구별하기 위해서, 각각의 실패 경우에 대해 전용 기준을 한정할 수 있다.
바람직한 실시 예에 있어서, 목표값에 대한 상대적인 편차의 가중합이 결정될 수 있고, 만약 가중합이 소정 값을 초과하면 경고신호가 출력되도록 기준이 선택될 수 있다.
다른 가중 계수들은 다른 실패 사건들과 연관될 수 있다. 이상적인 경우에 있어서, 실패 사건의 발생시에, 정확히는 하나의 기준이 충족되고 실패사건이 진단될 수 있다.
그러므로, 측정 헤드에서 압력을 결정하는 작동은 압력센서에 대해 의지함이 없이 상기한 방법에 의해서 가능하고, 측정 헤드에서 주어진 상태에 대한 결론이 그 방식에서 결정된 압력으로부터 얻어질 수 있고, 이것들은 주어진 측정치들의 개시를 시작할 수 있다.
압력 변수들은 본 발명에 따른 방법에 의해서 매우 정확히 결정될 수 있다.
추가의 실시 예에서, 그러므로 측정되거나 주어진 변수의 시간 구배가 확인되고, 만약 소정의 한계값을 초과하면, 밸브 개방 또는 밸브 폐쇄가 진단된다.
대안적인 실시 예에 있어서, 디스플레이서 요소의 질량 m, 디스플레이서 요소에 압축응력을 가하는 스프링의 스프링 상수 k, 전자기 드라이브의 댐핑 d 및/또는 전기저항 RCu는 물리적인 변수로서 결정된다.
특히 바람직한 실시 예에 있어서, 모든 상태 변수들이 결정된다. 그것은 예를 들면 최소 계산에 의해서 실행될 수 있다. 측정 챔버에서 압력을 제외하고 모든 특정 변수들은 실험에 의해서 결정될 수 있고 펌프 작동에서 일반적으로 변하지 않는 상수들을 나타낸다. 그럼에도 불구하고, 다른 요소들에 대한 피로현상이 발생하는데, 이것은 상수들의 값을 변화시킨다. 예를 들면, 측정된 압력-이동 관계는 예상된 압력-이동 관계와 비교될 수 있다. 두 관계로부터 사이클 동안에 걸쳐서 집적된 차이는 일정한 매개변수들에서의 변화에 의해서 최소화될 수 있다. 만약 예를 들어 스프링 상수가 변화하면, 결함 있는 스프링이 진단될 수 있다.
그러한 최소 작동은 압력-부족 상태, 즉, 측정 챔버에 유체가 존재하지 않는 경우에 수행될 수 있다.
본 명세서의 도입부에서 이미 언급한 바와 같이, 폐-루프 제어는 운반유체의 밀도와 점성에 의해서 두드러지게 영향을 받는다. 폐-루프 제어 정확도는 예를 들면 측정될 운반유체의 밀도 및/또는 점성에 의해서 개선될 수 있고, 측정 결과는 폐-루프 제어 매개변수들의 치수화를 위해서 사용된다. 그러나, 그러한 측정 작동은 적어도 하나의 추가적인 센서를 필요로 하는데, 이것은 변위펌프의 판매가를 증가시키고 유지 보수를 필요로 하게 된다. 그러므로, 밀도와 점성에서의 변화는 폐-루프 제어에서 고려되지 않는다.
특히 바람직한 실시 예에 있어서, 유압 매개변수들을 갖는 물리적인 모델이 유압 시스템에 대하여 설정될 수 있고 적어도 하나의 유압 매개변수는 최적 계산에 의해서 계산된다.
용어 유압 매개변수들은 측정 챔버를 통한 운반유체의 유동에 영향을 끼치는 디스플레이서 요소의 위치로부터 떨어진 유압 시스템의 어느 매개변수를 의미하도록 사용된다.
유압 매개변수들은 그러므로 예를 들면 측정 챔버에서 운반유체의 밀도와 챔버에서 유체의 점성이다. 또한, 유압 매개변수들은 측정 챔버에 적어도 일시적으로 연결되는 호스들과 파이프들의 직경과 호스 또는 파이프의 길이이다.
그 측정은 추가적인 센서를 제공함이 없이 유압 매개변수들을 결정할 수 있다.
양변위 펌프의 고유한 특성은 측정챔버를 흡입라인과 압력라인에 연결하는 밸브들 중 하나가 개방되거나 폐쇄되든지 간에 유압 시스템이 두드러지게 변한다는 것이다.
상기 시스템은 흡입라인에 대한 밸브가 개방되고 압력라인에 대한 밸브가 폐쇄되는 상황에 대하여 간단히 모델화된다. 특히, 유연한 호스는 흡입라인에 대한 밸브 및 주위압력 하의 공급 콘테이너에 있는 호스 단부들에 자주 끼워 맞추어진다.
그 상태는 소위 흡입 스트로크 운동 동안, 즉, 디스플레이서 요소가 2차 위치로부터 1차 위치로 이동하는 동안에 일어난다. 유압 시스템은 예를 들어 층류와 난류에 대하여 비-선형 나비에-스토크스 방정식에 의해서 설명될 수 있다. 운반유체의 밀도와 점성 이외에, 흡입밸브를 공급 콘테이너에 연결하는 호스의 직경, 호스의 길이, 호스에 있는 유체의 높이 차는 유압 매개변수들로서 고려된다.
사용된 각각의 시스템에 따라서 보다 의미 있는 가정이 만들어질 수 있다. 예를 들어 공지된 경사법(gradient method) 또는 레벤버그-마쿼트 알고리즘(Levenberg-Marquardt algorithms)에 의해서 실행될 수 있는 최적의 계산에 의해서, 측정헤드에서의 압력 변수 그리고 압력부분으로부터 파생된 운동이나 속도 및 가속도를 잘 설명하는 물리적인 모델에 포함된 유압 매개변수들을 결정할 수 있다.
본 발명에 따른 결정 방법은 흡입 스트로크 성능의 반복된 분석에 의해서 단독으로 실행될 수 있다.
그것에 대한 대안으로서, 흡입라인에 대한 밸브는 폐쇄되고 압력 라인에 대한 밸브는 개방되는 상황에 대하여 유압 시스템의 물리적인 모델을 고려할 수 있다. 그러나, 펌프 제조업자가 처음에는 측정 펌프가 사용된 환경을 알지 못하여 압력 라인을 측정 챔버에 연결하는 압력 밸브에 연결된 파이프 시스템을 알지 못하므로, 여기에서는 단지 일반화된 가정만이 사용될 수 있다. 그러므로, 압력 밸브에 연결된 파이프 시스템을 알지 못하는 상황에서, 흡입 스트로크 동안에 유압 시스템에 대하여 일반적으로 가능하므로, 물리적인 모델 설정은 정확하게 설정될 수 없다.
특히 바람직한 실시 예에 있어서, 설명한 유압 시스템들에 대하여 물리적인 모델이 사용될 수 있고, 밸브 개방 시간들이 측정되거나 결정되며, 각각의 보정 물리적인 모델은 밸브 개방시간을 결정하는 결과에 따라서 선택된다. 기본적으로, 본 발명에 따른 방법은 흡입 스트로크와 압력 스트로크에 대하여 별도로 수행된다. 두 경우에 있어서, 정확히 같지 않은 값들은 예를 들어 운반유체의 밀도와 점성과 같은 유압 매개변수들에 의해서 얻어진다. 원론적으로, 다른 값들을 평균화하는 것이 가능한데, 여기에서는 몇몇 상황하에서 흡입 스트로크 동안에 물리적인 모델에 의한 실제 상황의 양호한 설명을 통해서, 흡입 스트로크 동안에 얻어진 값은 압력 스트로크 동안에 확인된 값보다 평균 연산에서 보다 크게 가중된다는 사실을 고려해야 한다.
본 발명에 따른 방식으로 유압 매개변수들이 결정된 후에, 물리적인 모델은 측정 챔버에서의 압력을 결정하기 위해서 그 방식으로 결정된 유압 매개변수들과 함께 사용될 수 있다. 유체에 의해서 압력부분에 발휘된 힘이 그 방식으로 결정된 유압 매개변수들에 의해서 모델화되는 한에 있어서는, 그 지식은 압력부분의 운동 조절을 개선하기 위해서 사용될 수 있다.
본 발명의 다른 장점들, 특징들 및 가능한 용도들은 바람직한 실시 예의 상세한 설명과 첨부 도면들을 통해서 밝혀질 것이다, 첨부도면에서:
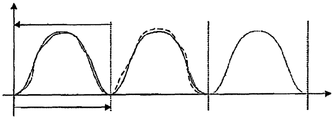
도 1은 이상적인 운동 프로필을 도식적으로 나타낸 그래프,
도 2는 자체-학습 함수를 도식적으로 나타낸 그래프,
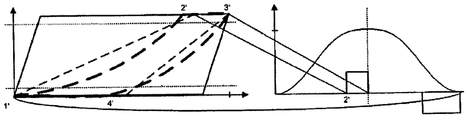
도 3은 압력-이동 그래프 및 정상 상태에 대한 이동-시간 그래프,
도 4는 압력-이동 그래프 및 측정 챔버에서 기포들이 제공된 상태에 대한 압력-이동 그래프 및 이동-시간 그래프의 개략도,
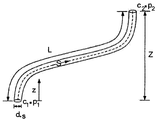
도 5는 양변위 펌프에 연결된 흡입라인의 개락도, 및
도 6a 내지 도 6e는 유압 매개변수들 및 그들의 시간에 따른 변화의 예들을 나타낸 도면.
도 1은 이상적인 운동 프로필을 도식적으로 나타낸 그래프,
도 2는 자체-학습 함수를 도식적으로 나타낸 그래프,
도 3은 압력-이동 그래프 및 정상 상태에 대한 이동-시간 그래프,
도 4는 압력-이동 그래프 및 측정 챔버에서 기포들이 제공된 상태에 대한 압력-이동 그래프 및 이동-시간 그래프의 개략도,
도 5는 양변위 펌프에 연결된 흡입라인의 개락도, 및
도 6a 내지 도 6e는 유압 매개변수들 및 그들의 시간에 따른 변화의 예들을 나타낸 도면.
본 발명에 따른 방법은 자기 측정 펌프와 관련하여 개발되었다. 바람직한 실시 예에 있어서, 그러한 측정 펌프는 거기에 단단히 연결된 스러스트 로드를 구비한 가동 압력부를 갖는다. 압력부분은 펌프 하우징에 단단히 고정된 자기 케이싱서 종축을 따라서 축방향으로 이동 가능하게 지지되고, 그래서 스러스트 로드를 갖는 압력부분은 자기 케이싱에서 자기-코일의 전기적 작동시에 압축 스프링의 힘에 대항하여 자기 케이싱에 있는 보어 내로 강제 도입되고, 압력부분은 솔레노이드의 비활성화 후에 압축 스프링으로 인하여 초기 위치로 되돌아 간다. 이것의 결과는 압력부분 및 이에 의해서 작동된 다이어프램은 자기 코일의 계속된 활성화 및 비활성화시에, 종축에 배열된 측정 헤드에서 배출구 및 유입구 밸브와 연관하여 진동운동을 수행하고, 펌프 스트로크(압력 스트로크) 및 흡기 스트로크(흡입 스트로크)를 초래한다. 자기코일의 활성화는 코일에 전압을 인가하는 것에 의해서 실행된다. 그러므로, 압력부분의 운동은 코일에 인가된 전압의 시간 패턴에 의해서 결정될 수 있다.
압력 스트로크와 흡입 스트로크는 동일한 시간 동안에 지속될 필요가 없음을 알 수 있을 것이다. 흡입 스트로크 동안에 측정이 실행되지 않고 측정 챔버가 운반유체에 의해서 단지 다시 채워짐에 따라서, 어느 경우에 가능한한 빠르게 수행되는 흡입 스트로크에 대해 바람직하게 비교되며, 압력 챔버에 공동현상이 발생하지 않는 것을 보장하도록 주의가 필요하다.
이에 비해서, 압력 스트로크는 특히 단지 매우 적은 양의 유체가 측정되는 사용 상황에서 매우 길어질 수 있다. 이것의 결과는 압력부분이 단지 측정 챔버의 방향으로 점진적으로 운동한다는 것이다. 압력부분의 운동을 달성하기 위해서, 도 1로부터 이상적으로 도시된 바와 같이, 압력부분의 운동은 폐-루프 제어를 받아야만 한다. 그 경우에 있어서, 압력부분의 위치와 자기코일을 통한 전류의 크기는 측정변수로서 일반적으로 유용하다.
본 발명에 따르면, 그러므로 비-선형 모델이 개발되었는데, 이것은 자기 시스템의 상태를 나타낸다.
다음 모델은 바람직한 실시 예에 적용된다.

여기에서,
m: 압력부분의 질량
φ: 자기 플럭스
N1: 회전수
u: 전압
d: 댐핑
k: 스프링 상수
Fvor: 스프링 압축응력으로 인해 압력부분에 작용하는 힘
Fp: 운반챔버에서의 유체 압력으로 인해 압력부분에 작용하는 힘
RCu: 코일의 옴 저항
x: 압력부분의 위치
δ: 전기자와 자석 사이의 간격 크기
이것은 시작점으로부터 시작하여 시스템의 바로 다음의 거동에 대한 예측을 제공할 수 있는 비-선형 미분방정식 시스템이다.
그러므로, 타겟 곡선과 실제 곡선 사이에서 미래에 존재할 수 있거나 또는 실제로 이미 존재하는 편차를 모델에 의해서 식별할 수 있다. 그 모델은 제어 개입의 가능한 영향을 계산하기 위해서 사용될 수 있다.
실시간으로, 그러므로 전류세기와 압력부분의 위치의 측정은 그 시스템이 어떻게 발전할 것인지를 결정한다. 제어 개입, 즉 시스템이 원하는 방향으로 다시 이동하는 것에 의해서 자기코일에서 전류의 변화를 계산하는 것 또한 가능하다.
폐-루프 제어를 위한 시스템에서 다수의 가능한 방식의 개입이 존재함을 알 수 있을 것이다. 그러므로, 동적 시스템에 대한 안정한 솔루션을 찾는 것이 어느 순간에도 가능하다. 연산단계는 최적의 폐-루프 제어를 달성할 수 있게 하는 유용한 연산력으로서 계속적으로 반복된다.
여기에서 제안된 모델을 사용하여 매순간 동적 시스템의 새로운 안정한 솔루션들을 결정하는 것은 일반적으로 필요하지 않다. 일반적으로, 적당한 보정 함수가 일단 측정변수들, 즉, 압력부분의 위치와 자기 드라이브에 인가된 전압에 따라서 결정되고 그 후에는 폐-루프 제어에 대한 보정함수로서 사용되기에 충분하다.
폐-루프 제어에도 불구하고, 목표값과 실제값 사이에는 항상 이상을 나타내는 선택된 모델로서 불가피하게 편차가 존재할 것이다. 또한, 탐지된 측정변수들은 항상 에러에 의해서 피해를 입는다(노이즈).
압력-흡입 사이클 동안에 측정되는 실제 프로필과 타겟 프로필 사이의 차이와 측정된 차이의 합을 줄이기 위해서, 원하는 타겟 프로필이 다음 사이클 동안에 타겟 프로필로서 사용된다. 다시 말해서, 사용은 압력-스트로크 사이클이 반복되는 사실에 의해서 이루어진다. 그러므로, 다음 사이클에서, 실제로 원하는 목표값 프로필과 관련하여 벗어난 소정의 목표값 프로필이 존재한다.
자체-조절 원리는 명확화 목적을 위해서 도 2에 도식적으로 나타내었다. 이것은 Y-축 상에 압력부분의 위치를, X-축 상에는 시간을 나타내었다.
제 1 사이클에 있어서, 폐-루프 제어를 위해 사용된 타겟 프로필은 점선으로 도시되어 있다. 타겟 프로필은 참조 프로필로서 제 3 사이클과 비교하기 위해서 재생성된 원하는 타겟 프로필에 대응한다. 본 발명에 따른 모델-기반 폐-루프 제어에도 불구하고, 실제 프로필은 타겟 프로필로부터 벗어날 것이다. 도 2에 나타낸 제 1 사이클에 있어서, 예로서, 실제 프로필은 실선으로 도시되어 있다. 그 경우에 있어서, 실제 프로필과 타겟 프로필 사이의 편차는 실제로 이것들이 발생하는 것보다 더 확고하게 분명히 나타나 있다.
제 2 사이클에 있어서, 제 1 사이클의 실제 프로필과 참조 프로필 사이의 차이는 제 1 사이클을 위해서 사용된 타겟 프로필로부터 차감되고, 그 차이는 제 2 사이클 동안에 폐-루프 제어를 위한 타겟 프로필로서 사용된다. 그 방식으로 얻어진 타겟 프로필은 제 2 사이클에서 점선으로 도시된다.
이상적인 경우에 있어서, 제 2 사이클에서, 실제 프로필은 제 1 사이클에서 관찰된 바와 같이 사용된 타겟 프로필로부터 동일한 범위로 벗어난다. 그 결과, 참조 프로필에 대응하는 실제 프로필(제 2 사이클에서 실선으로 도시됨)이 존재한다.
압력부분의 위치 및 자기 드라이브 Fp를 통한 전류의 측정에 의해서, 즉 운반챔버에서 유체 압력으로 인하여 압력부분에 작용하는 힘은 유일하게 알려지지 않은 변수이다. 그러므로, 그 모델을 사용하여, 유체 압력으로 인하여 압력부분에 작용하는 힘을 결정할 수 있다. 유체압력을 받는 압력부분의 영역이 알려져 있으므로, 유체압력은 그 힘으로부터 계산될 수 있다.
전자기 측정 펌프 시스템에 대한 비-선형 시스템 설명의 상기한 기안은 모델-기반 진단 방법의 사용을 가능하게 한다. 그 목적을 위해서, 시스템 모델들의 상태 매개변수들이 평가되고, 전자기 측정 펌프의 펌프 헤드에서의 압력이 결정된다. 필수적인 전류 및 위치 센서들은 제어 목적을 위해서 펌프 시스템에 이미 설치되고, 그래서 그 정보는 측정 펌프의 구조에 대한 보충없이 이미 유용하다. 진단 알고리즘은 상태 매개변수들에서의 시간 변화와 펌프의 측정 헤드에서의 압력을 기반하여 수행될 수 있다.
그러므로, 예를 들면 공정-측 초과압력 및 자동화 펌프 작동중단의 모델-기반 진단이 실행될 수 있다.
밸브 개방과 밸브 폐쇄의 인식은 예를 들면 시스템 모델의 연결된 상태 매개변수들의 시간 구배를 결정하고 평가하는 것에 의해서 실행될 수 있다. 상태 구배를 초과하거나 그 아래로 떨어지는 상황은 소정의 한계치들에 의해서 탐지될 수 있고, 이것은 밸브 개방과 밸브 폐쇄 시간의 확인을 가능하게 한다.
이와는 달리, 압력부분의 위치에 따라서 압력을 결정하고 평가 작동으로부터 밸브 개방과 밸브 폐쇄 시간을 유추할 수 있다. 대응하는 압력-이동 그래프가 도 1의 좌측에 도시되어 있다. 이동-시간 그래프는 압력부분의 시간에 따른 운동을 나타낸다. 압력부분은 시작 위치 1(x=0 mm)로부터 전방으로 먼저 이동하고 측정 챔버(압력 위상)의 체적을 줄임을 볼 수 있을 것이다. 시간 3에서 압력부분은 최대를 통과하고 다음에는 시작 위치로 다시 되돌아간다(흡입 위상).
연관된 압력-이동 그래프가 도 3에서 좌측에 도시되어 있다. 시계방향으로 이동하는데, 압력부분이 위치 1에 놓이는 좌표 원점에서 시작한다. 압력 위상 동안에 측정 챔버 내의 압력은 압력이 압력 라인에 대한 밸브의 개방위치에 놓일 때까지 초기에는 가파르게 상승한다. 압력 밸브가 개방되자마자 측정 챔버 내의 압력은 대체로 일정하게 유지된다. 개방 지점은 참조 2로 나타내었다. 도 3에서 우측에 나타낸 순간에 측정 작용이 일어난다. 압력부분의 각각의 추가 운동에 따라서, 측정 유체는 압력 라인 내로 펌핑된다. 압력부분이 최대 위치(시간 3)에 도달하자 마자, 압력부분의 운동은 역전되고, 압력 밸브는 즉각적으로 폐쇄되고 측정 챔버내의 압력은 다시 떨어진다. 최소 압력이 도달하자마자(시간 4), 측정 챔버를 흡입라인에 연결하는 흡입 밸브가 개방되고, 시작위치로 되돌아 올 때까지 측정 유체는 측정 챔버 내로 흡입된다.
압력부분의 이동 최대에 놓임에 따라서 이동-시간 그래프로부터 밸브 폐쇄 시간이 결정될 수 있다. 시간 2 및 4, 즉 밸브 개방시간은 특히 실제로 압력-이동 그래프가 굴곡진 "코너들"을 가짐에 따라서, 그렇게 쉽게 결정하지 않는다. 그러므로, 예를 들면, 압력-이동 그래프에서 위치 1로부터 시작하여 압력 최대(위치 3으로부터 알려짐)의 90%에 달할 때, 이동은 읽어낼 수 있고, 지점 1과 2 사이에서 압력-이동 그래프의 구배가 결정될 수 있다. 90% 곡선은 점선으로 나타내었다. 결과적인 직선은 밸브 개방시간에서 곡선 p=pmax를 가로지른다. 시간 4는 동일한 방식으로 결정될 수 있다. 결정 작동은 각각의 사이클에서 실행될 수 있고 그 결과는 후속 사이클에 대해 사용된다. 그 방식에 있어서, 개방 시간에서의 변화들이 또한 탐지된다.
유압 시스템에서 기포들, 측정 유닛의 펌프 헤드에서의 공동현상 및/또는 측정 유닛들의 밸브 개방 및 밸브 폐쇄는 개별적인 상태 매개변수들의 목표 및 실제 궤적의 비교에 의해서 진단될 수 있다. 특히, 소정의 실패 한계가 목표 및 실제 궤적들 사이에서 초과되는 경우, 경고신호 및 대응하는 측정이 개시될 수 있다.
예가 도 4에 도시되어 있다. 여기에는 압력-이동 그래프가 좌측에 도시되어 있고 이동-시간 그래프가 우측에 도시되어 있다. 우측 도면은 도 3에서 대응하는 그래프와 동일하다. 유압 시스템에서 압축가능한 기포들이 존재하면, 압력 밸브가 단지 시간 2'에서 개방되고 흡입 밸브는 단지 시간 4'에서 개방되는 결과를 가질 수 있다. 그러므로, 밸브 개방 시간에서 표시한 이동은 "측정 챔버 내의 공기" 상태를 진단하도록 사용될 수 있다. 공동현상의 경우에 있어서, 밸브 개방 시간 2가 아니라 단지 밸브 개방 시간 4'가 이동되고 그래서 그 거동은 "공동현상" 상태를 진단하도록 사용될 수 있다.
제공된 모델-기반 방법은, 개별적으로 연결된 시스템 상태 매개변수들의 분석에 의해서, 이미 실행된 것들보다 광범위하고 높은 등급의 진단을 가능하게 한다.
또한, 낮은 센서 시스템 비용 및 높은 수준의 신뢰성과 확실성이 달성될 수 있다. 높은 질의 진단은 측정 정확도가 극단적으로 개선될 수 있음에 따라서 전자기 측정 펌프 시스템의 사용 영역이 몇몇 상황에서 향상될 수 있음을 의미한다.
물리적인 모델의 설계에 의해서, 특히 측정 챔버 또는 전자기 측정 펌프 시스템의 측정 챔버에 연결된 라인에서 유압 프로세스의 비-선형 시스템 설명에 의해서, 실시간으로 모델-기반 확인 방법들을 사용할 수 있다. 그 목적을 위해서, 유압 매개변수들, 즉 유압 모델들의 상태 매개변수들이 평가되고 유압 프로세스의 매개변수들 뿐만아니라 시스템 동특성이 결정된다.
디스플레이서 요소의 위치 또는 디스플레이서 요소의 거리로부터 유추될 수 있는 속도와 가속도 그리고 다이아프램에 의해서 운반유체에 발휘된 힘에 의해서 결정될 수 있는 측정 챔버 내의 압력은 측정변수들 또는 결정될 외부 변수로서 기능한다.
일반적으로, 특정한 양변위 펌프에서, 흡입라인은 흡입 밸브를 공급 콘테이너에 연결하는 호스를 포함하며, 유압 시스템은 흡입 스트로크, 즉, 도 5에 나타낸 바와 같이 압력 밸브는 폐쇄되고 흡입 밸브는 개방되는 동안을 위해 단순한 형태로 설명될 수 있다. 흡입라인은 호스의 직경 DS과 호스 길이 L를 포함한다. 호스는 높이 차 Z에 걸쳐서 연결한다.
만약 흡입라인이 일정한 직경을 가지며 신축가능하지 않고 압축불가능한 유체가 사용되면, 비-선형 나비에-스토크스 방정식은 단순화될 수 있다.
예를 들어 경사법(gradient method) 또는 레벤버그-마쿼트 알고리즘(Levenberg-Marquardt algorithms)과 같은 공지된 최적화 방법들에 의해서, 유압 매개변수들이 결정되는데, 상기 모델을 기반하여 압력부분의 측정되거나 결정된 위치 및 측정 챔버에서 측정되거나 결정된 압력을 잘 설명할 수 있다.
도 6a 내지 도 6e는 운반유체로서 글리세린을 사용하여, 시간에 대비하여 본 발명에 따른 방법으로부터 얻은 값들(실선)과 유압 매개변수(점선)을 각각 나타낸다.
그러므로, 예를 들면, 도6a는 운반유체의 밀도를 나타낸다. 이것은 약 1260 kg/m3(점선)이다. 본 발명에 따른 방법은 약 100초 내에 밀도를 결정하기 위한 위치에 놓임을 알 수 있을 것이다. 인정하건대, 시간 t = 0초에서, 주어진 값은 실제 값보다 상당히 아래이다. 그러나, 진행중인 최적화에 의해서, 밀도에 대해 본 발명에 따른 방법에 의해서 결정된 값은 실제 값(실선)으로 급속하게 접근한다.
동일한 것이 호스 길이 L (도 6b 참조), 높이차 Z (도 6c 참조), 호스 직경(도 6d 참조) 및 점성 (도 6e 참조)에 적용된다.
본 발명에 따른 방법에 의해서 결정된 매개변수들은 유압 시스템에 의해서 압력부분에 발휘되는 힘을 결정하기 위해서 생성된 물리적인 모델과 함께 사용될 수 있다.
그 정보는 본 발명에 따른 폐-루프 제어를 위해서 사용될 수 있다. 그러므로, 개발된 유압 모델은 유압 시스템의 영향을 물리적으로 재생하고, 장애 가변 침해의 형태로 동일하게 고려된다.
전자기 측정 펌프 시스템의 펌프 작동이 크게 개선된다.
Claims (18)
- 이동 가능한 디스플레이서 요소는 밸브들에 의해서 흡입 라인과 압력 라인에 연결된 측정 챔버의 범위를 정하고, 그래서 운반 유체는 상기 흡입 라인에 의해서 상기 측정 챔버 내로 교호적으로 흡입될 수 있고, 상기 디스플레이서 요소의 진동운동에 의해서 상기 압력 라인에 의해서 상기 측정 챔버 밖으로 강제 배출되며, 상기 디스플레이서 요소의 진동운동을 위한 드라이브가 제공되는, 양 변위펌프의 측정 프로필을 최적화하는 방법에 있어서,
모델-기반 폐-루프 제어가 상기 드라이브에 대해서 사용되는 것을 특징으로 하는 방법. - 제 1 항에 있어서, 상기 방법은 전자기적으로 구동되는 측정 펌프들, 바람직하게는 전자기적으로 구동되는 다이아프램 펌프들의 측정 프로필을 최적화하기 위해서 사용되는 것을 특징으로 하는 방법.
- 제 2 항에 있어서, 상기 디스플레이서 요소의 위치 및/또는 상기 전자기 드라이브를 통한 전류가 측정되고, 상태 공간 모델은 상기 모델-기반 폐-루프 제어를 위해 사용되며, 상기 상태 공간 모델은 상기 디스플레이서 요소의 위치 및/또는 상기 전자기 드라이브를 통한 전류를 측정변수들로서 사용하고, 바람직하게는 상기 상태 공간 모델은 탐지될 어느 추가적인 측정변수들을 갖지않는 것을 특징으로 하는 방법.
- 제 1 항 내지 제 3 항들 중 한 항에 있어서, 미분 방정식 및 더욱 바람직하게는 상기 디스플레이서 요소의 운동 방정식은 상기 모델-기반 폐-루프 제어를 위해서 사용되는 것을 특징으로 하는 방법.
- 제 4 항에 있어서, 상기 압력부분에 작용하는 변위펌프-특정 힘들은 상기 미분 방정식 또는 운동 방정식으로 모델화되는 것을 특징으로 하는 방법.
- 제 1 항 내지 제 5 항들 중 한 항에 있어서, 비-선형 상태 공간모델이 상태 공간 모델로서 선택되고, 상기 비-선형 폐-루프 제어는, 제어-리아프노프 함수들에 의해서, 평탄-기반 사전적 통제에 따른 평탄-기반 폐-루프 제어 방법들에 의해서, 적분형 백스텝핑법(integrator backstepping methods)에 의해서, 슬라이딩 모드 방법에 의해서 또는 예측적인 폐-루프 제어에 의해서 실행되고, 상기 제어-리아프노프 함수들에 의한 비-선형 폐-루프 제어가 바람직한 것을 특징으로 하는 방법.
- 제 2 항 내지 제 6 항들 중 한 항에 있어서, 상기 디스플레이서 요소의 상기 탐지된 실제 위치 프로필과 상기 디스플레이서 요소의 소정의 목표 위치 프로필 사이의 차이는 흡입-압력 사이클 동안에 탐지되고, 탐지된 차이와 소정의 목표 위치 프로필의 적어도 일부의 차이가 다음 흡입-압력 사이클 동안에 목표값 프로필로서 사용되는 것을 특징으로 하는 방법.
- 제 4 항 내지 제 7 항들 중 한 항에 있어서, 물리적인 변수가 상기 변위펌프에서 상기 미분방정식 또는 운동 방정식에 의해서 결정되는 것을 특징으로 하는 방법.
- 제 8 항에 있어서, 변위펌프의 측정 챔버에 배치된 운반 유체의 유체 압력 p는 물리적인 변수로서 결정되는 것을 특징으로 하는 방법.
- 제 8 항 및 제 9 항 중 한 항에 있어서, 만약 실제 유체 압력이 소정의 최대 값에 도달하거나 이것을 초과하면, 경고신호가 출력되고, 바람직하게는 상기 경고신호는 상기 경고신호의 수신에 반응하여 상기 측정펌프를 작동중단시키는 자동 작동중단 장치로 보내지는 것을 특징으로 하는 방법.
- 제 8 항 내지 제 10 항들 중 한 항에 있어서, 상기 디스플레이서 요소의 운동 사이클 동안에, 타겟 유체 압력 곡선, 상기 디스플레이서 요소의 타겟 위치 곡선 및/또는 상기 전자기 드라이브를 통한 타겟 전류 패턴이 저장되고, 실제 유체 압력이 타겟 유체 압력에 비교되고, 상기 디스플레이서 요소의 실제 위치가 상기 디스플레이서 요소의 타겟 위치에 비교되고 및/또는 상기 전자기 드라이브를 통한 실제 전류는 상기 전자기 드라이브를 통한 타겟 전류와 비교되고, 실제 값과 목표 값 사이의 차이가 소정의 기준을 만족시키면 경고신호가 출력되는 것을 특징으로 하는 방법.
- 제 11 항에 있어서, 상기 목표값에 대한 상대적인 편차의 가중치 합이 결정되고, 만약 가중치 합이 소정 값을 초과하면, 경고신호가 출력되게 기준이 선택되는 것을 특징으로 하는 방법.
- 제 11 항 또는 제 12 항에 있어서, 다수의 기준이 미리 결정되고, 실패 사건은 각각의 기준과 연관되며, 만약 기준이 충족되면, 연관된 실패 사건이 진단되는 것을 특징으로 하는 방법.
- 제 8 항 내지 제 13 항들 중 한 항에 있어서, 상기 디스플레이서 요소의 질량 m, 상기 디스플레이서 요소에 압축응력을 가하는 스프링의 스피링 상수 k, 상기 전자기 드라이브의 댐핑 d 및/또는 전기저항 RCu가 물리적인 변수로서 결정되는 것을 특징으로 하는 방법.
- 제 1 항 내지 제 14 항들 중 한 항에 있어서, 상기 양 변위 펌프에서 유압 매개변수들이 결정되고, 상기 유압 시스템에 대하여, 물리적인 모델이 유압 매개변수들과 함께 설정되고, 상기 디스플레이서 요소의 위치 뿐만아니라 상기 디스플레이서 요소에 의해 상기 측정 챔버의 유체에 발휘된 힘 또는 상기 측정 챔버 내의 압력이 결정되고, 적어도 하나의 유압 매개변수는 최적 계산에 의해서 계산되는 것을 특징으로 하는 방법.
- 제 15 항에 있어서, 상기 측정 챔버 내 유체의 밀도 및/또는 상기 측정 챔버 내 유체의 점성은 유압 매개변수로서 결정되는 것을 특징으로 하는 방법.
- 제 15 항 또는 제 16 항에 있어서, 상기 물리적인 모델은 상기 흡입 라인에 대한 밸브가 개방되고 상기 압력 라인에 대한 밸브는 폐쇄되는 상황 및/또는 상기 흡입 라인에 대한 밸브가 폐쇄되고 상기 압력 라인에 대한 밸브는 개방되는 상황에 대해 설정되며, 만약 상기 물리적인 모델은 상기 흡입 라인에 대한 밸브가 개방되고 상기 압력 라인에 대한 밸브는 폐쇄되는 상황과, 상기 흡입 라인에 대한 밸브가 폐쇄되고 상기 압력 라인에 대한 밸브는 개방되는 상황에 모두에 대해 설정되면, 밸브 개방시간이 결정되고, 상기 물리적인 모델은 밸브 개방시간의 결정 결과에 따라서 선택되는 것을 특징으로 하는 방법.
- 제 15 항 내지 제 17 항들 중 한 항에 있어서, 유압 매개변수가 동일한지를 결정한 후, 운반유체 의해서 상기 디스플레이서 요소에 작용하는 힘을 결정하기 위해서 물리적인 모델이 사용되고, 그 방식으로 결정된 힘은 상기 디스플레이서 요소의 운동의 폐-루프 제어에서 사용되는 것을 특징으로 하는 방법.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102013109412.0 | 2013-08-29 | ||
| DE102013109412.0A DE102013109412A1 (de) | 2013-08-29 | 2013-08-29 | Verfahren zur Verbesserung von Dosierprofilen von Verdrängerpumpen |
| PCT/EP2014/067815 WO2015028384A1 (de) | 2013-08-29 | 2014-08-21 | Verfahren zur verbesserung von dosierprofilen von verdrängerpumpen |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20160051810A true KR20160051810A (ko) | 2016-05-11 |
Family
ID=51429271
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020167007967A KR20160051810A (ko) | 2013-08-29 | 2014-08-21 | 변위펌프의 측정 프로필을 개선하기 위한 방법 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US20160201657A1 (ko) |
| EP (1) | EP3039288B2 (ko) |
| JP (1) | JP2016529440A (ko) |
| KR (1) | KR20160051810A (ko) |
| CN (1) | CN105745443A (ko) |
| CA (1) | CA2922313C (ko) |
| DE (1) | DE102013109412A1 (ko) |
| WO (1) | WO2015028384A1 (ko) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102013109412A1 (de) | 2013-08-29 | 2015-03-05 | Prominent Gmbh | Verfahren zur Verbesserung von Dosierprofilen von Verdrängerpumpen |
| DE102013109411A1 (de) * | 2013-08-29 | 2015-03-05 | Prominent Gmbh | Verfahren zur Bestimmung von hydraulischen Parametern |
| DE102016008783A1 (de) * | 2016-07-22 | 2018-01-25 | Knf Flodos Ag | Oszillierende Verdrängerpumpe mit elektrodynamischem Antrieb und Verfahren zu deren Betrieb |
| DE102020116071A1 (de) | 2020-06-18 | 2021-12-23 | Prominent Gmbh | Verfahren zum Steuern eines mit einer Dosierpumpe förderbaren Volumens |
Family Cites Families (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19842565B4 (de) * | 1998-09-03 | 2005-08-25 | Ksb Ag | Automatische Ermittlung der PID-Reglerparameter für einen Druckregelkreis in Mehrpumpenanlagen |
| GB0005866D0 (en) * | 2000-03-10 | 2000-05-03 | Borealis Polymers Oy | Process control system |
| US7099136B2 (en) | 2002-10-23 | 2006-08-29 | Seale Joseph B | State space control of solenoids |
| JP2005207357A (ja) * | 2004-01-26 | 2005-08-04 | Honda Motor Co Ltd | エンジンの可変容量流体ポンプ |
| DE102004015618A1 (de) * | 2004-03-30 | 2005-10-20 | Zexel Valeo Compressor Europe | Hubraumvariabler Verdichter sowie Verfahren zur Regelung des Kolbenhubs in einem solchen |
| US20050225201A1 (en) * | 2004-04-02 | 2005-10-13 | Par Technologies, Llc | Piezoelectric devices and methods and circuits for driving same |
| DE202005001746U1 (de) * | 2004-08-20 | 2005-12-22 | Nash-Elmo Industries Gmbh | Vorrichtung zum Steuern einer Strömungsarbeitsmaschine |
| DE102005039772A1 (de) * | 2005-08-22 | 2007-03-08 | Prominent Dosiertechnik Gmbh | Magnetdosierpumpe |
| US20070100475A1 (en) * | 2005-10-25 | 2007-05-03 | Korchinski William J | Method and apparatus for applying reduced nonlinear models to optimization of an operation |
| SE529328C2 (sv) * | 2005-11-15 | 2007-07-10 | Johan Stenberg | Styrsystem samt metod för styrning av elektromagnetiskt drivna pumpar |
| US8079825B2 (en) * | 2006-02-21 | 2011-12-20 | International Rectifier Corporation | Sensor-less control method for linear compressors |
| TWI402423B (zh) * | 2006-02-28 | 2013-07-21 | Entegris Inc | 用於一幫浦操作之系統及方法 |
| JP2007270689A (ja) * | 2006-03-30 | 2007-10-18 | Ebara Corp | マイクロポンプ装置および流体移送方法 |
| CN100465825C (zh) * | 2007-06-13 | 2009-03-04 | 袁璞 | 变结构非线性模型预估控制器 |
| JP4476314B2 (ja) * | 2007-08-10 | 2010-06-09 | 三洋電機株式会社 | モータ制御装置及び圧縮機 |
| DE102007040538A1 (de) * | 2007-08-28 | 2009-03-05 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Zustandsdiagnose einer hydraulischen Maschine |
| DE102007047724A1 (de) * | 2007-10-05 | 2009-04-09 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Ansteuerung eines Hydraulikaggregats |
| KR100963742B1 (ko) * | 2007-10-24 | 2010-06-14 | 엘지전자 주식회사 | 왕복동식 압축기 |
| JP5504175B2 (ja) * | 2008-01-31 | 2014-05-28 | フィッシャー−ローズマウント システムズ,インコーポレイテッド | モデル不一致を補償するためのチューニングを有する頑健な適応モデル予測コントローラ |
| SE532405C2 (sv) * | 2008-05-02 | 2010-01-12 | Johan Stenberg | Pumpsystem samt förfarande för att fastställa ett tryckvärde |
| DE102008030544B4 (de) * | 2008-06-27 | 2014-05-22 | Siemens Aktiengesellschaft | Modellbasiertes Verfahren zur Überwachung von mikromechanischen Pumpen |
| DE102008064491A1 (de) | 2008-12-23 | 2010-06-24 | Kaeser Kompressoren Gmbh | Simulationsgestütztes Verfahren zur Steuerung bzw. Regelung von Druckluftstationen |
| MX2011008313A (es) * | 2009-02-12 | 2011-08-17 | S The Board Of Trustees Of The University Of Illinoi | Microbomba de transmision magnetica. |
| US20130184640A1 (en) * | 2010-04-20 | 2013-07-18 | Minipumps, Llc | Accurate flow control in drug pump devices |
| BR112012029301B1 (pt) * | 2010-05-18 | 2020-03-03 | Aktiebolaget Electrolux | Método de dispensar um volume especificado de líquido usando uma bomba, dispositivo de dosagem, e, conjunto de dispensação |
| US8538645B2 (en) * | 2010-06-23 | 2013-09-17 | Caterpillar Inc. | Control system having load-adjusted economy mode |
| BR112013012171B1 (pt) * | 2010-11-17 | 2022-03-29 | KSB SE & Co. KGaA | Método para controle de velocidade rotacional variável de uma unidade de bomba de deslocamento, dispositivo de controle e arranjo de bomba de deslocamento |
| US10280916B2 (en) * | 2011-07-28 | 2019-05-07 | Ecolab Usa Inc. | Diaphragm pump for dosing a fluid and an according method |
| DE102011110056B4 (de) * | 2011-08-12 | 2022-08-11 | Vitesco Technologies GmbH | Verfahren zur Dosierung eines Reduktionsmittels |
| CN102305998B (zh) * | 2011-09-19 | 2013-03-13 | 中国石油天然气股份有限公司 | 基于井下多参数实时监测的抽油机闭环控制方法及系统 |
| DE102011115650B4 (de) * | 2011-09-28 | 2022-03-03 | Robert Bosch Gmbh | Verfahren zur Diagnose des Zustandes einer hydrostatischen Verdrängermaschine und hydraulische Anordnung mit hydrostatischer Verdrängermaschine |
| DE102013109410A1 (de) * | 2013-08-29 | 2015-03-19 | Prominent Gmbh | Verfahren zur Bestimmung einer physikalischen Größe in einer Verdrängerpumpe |
| DE102013109412A1 (de) | 2013-08-29 | 2015-03-05 | Prominent Gmbh | Verfahren zur Verbesserung von Dosierprofilen von Verdrängerpumpen |
| DE102013109411A1 (de) * | 2013-08-29 | 2015-03-05 | Prominent Gmbh | Verfahren zur Bestimmung von hydraulischen Parametern |
-
2013
- 2013-08-29 DE DE102013109412.0A patent/DE102013109412A1/de active Pending
-
2014
- 2014-08-21 KR KR1020167007967A patent/KR20160051810A/ko not_active IP Right Cessation
- 2014-08-21 CA CA2922313A patent/CA2922313C/en active Active
- 2014-08-21 JP JP2016537236A patent/JP2016529440A/ja active Pending
- 2014-08-21 EP EP14757888.4A patent/EP3039288B2/de active Active
- 2014-08-21 CN CN201480047726.9A patent/CN105745443A/zh active Pending
- 2014-08-21 US US14/912,297 patent/US20160201657A1/en not_active Abandoned
- 2014-08-21 WO PCT/EP2014/067815 patent/WO2015028384A1/de active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| DE102013109412A1 (de) | 2015-03-05 |
| CN105745443A (zh) | 2016-07-06 |
| EP3039288B2 (de) | 2023-08-23 |
| CA2922313A1 (en) | 2015-03-05 |
| JP2016529440A (ja) | 2016-09-23 |
| WO2015028384A1 (de) | 2015-03-05 |
| US20160201657A1 (en) | 2016-07-14 |
| CA2922313C (en) | 2022-06-28 |
| EP3039288B1 (de) | 2020-04-15 |
| EP3039288A1 (de) | 2016-07-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CA2921877C (en) | Method for determining a physical variable in a positive displacement pump | |
| CA2920224C (en) | Method for determining hydraulic parameters in a displacement pump | |
| KR101668826B1 (ko) | 액추에이터의 이상 검출 시스템 | |
| JP4738171B2 (ja) | 医用ポンプの動作状態を識別する方法 | |
| DK2386027T3 (en) | WORKING MACHINE WITH FLUIDUM AND PROCEDURE FOR OPERATING A WORKING MACHINE WITH FLUIDUM | |
| KR20160051810A (ko) | 변위펌프의 측정 프로필을 개선하기 위한 방법 | |
| JP2016530444A5 (ko) | ||
| US20230052987A1 (en) | System and method for solenoid valve optimization and measurement of response deterioration | |
| CN109923288B (zh) | 用于监控在机动车辆的液压系统中的压力传感器的方法和装置 | |
| CN109642557B (zh) | 操作计量装置的方法 | |
| KR101885429B1 (ko) | 위치 전송기 모델을 이용한 공기구동 제어 밸브의 진단 방법 및 장치 | |
| JP7254505B2 (ja) | 作動流体監視センサ及び流体圧駆動装置 | |
| AU2011211439A1 (en) | Fluid-working machine and method of operating a fluid-working machine | |
| US20190154031A1 (en) | Pump Monitoring Using Acoustical Characterizations | |
| WO2023237650A1 (en) | Method for determining operational information of a metering pump | |
| WO2024114972A1 (en) | Method for evaluating the proper installation of a metering pump and metering pump | |
| JP6410293B2 (ja) | センサキャリブレーションシステム、方法、およびプログラム | |
| Muenchhof et al. | Model adjustment and multi-model based fault diagnosis for hydraulic servo axis |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| AMND | Amendment | ||
| E902 | Notification of reason for refusal | ||
| AMND | Amendment | ||
| E601 | Decision to refuse application | ||
| AMND | Amendment | ||
| X601 | Decision of rejection after re-examination |