KR20160032014A - 타임 오브 플라이트 시스템 구동 방법 - Google Patents
타임 오브 플라이트 시스템 구동 방법 Download PDFInfo
- Publication number
- KR20160032014A KR20160032014A KR1020157035188A KR20157035188A KR20160032014A KR 20160032014 A KR20160032014 A KR 20160032014A KR 1020157035188 A KR1020157035188 A KR 1020157035188A KR 20157035188 A KR20157035188 A KR 20157035188A KR 20160032014 A KR20160032014 A KR 20160032014A
- Authority
- KR
- South Korea
- Prior art keywords
- signal
- taps
- tap
- pixel
- pair
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 37
- 238000005286 illumination Methods 0.000 claims abstract description 22
- 238000003384 imaging method Methods 0.000 claims abstract description 16
- 238000005259 measurement Methods 0.000 claims description 13
- 238000001514 detection method Methods 0.000 description 12
- 230000003287 optical effect Effects 0.000 description 5
- 239000000969 carrier Substances 0.000 description 4
- 230000000737 periodic effect Effects 0.000 description 3
- 230000001276 controlling effect Effects 0.000 description 2
- 230000002596 correlated effect Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 230000005684 electric field Effects 0.000 description 2
- 230000015654 memory Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 238000011160 research Methods 0.000 description 2
- 239000000758 substrate Substances 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 230000000875 corresponding effect Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000009792 diffusion process Methods 0.000 description 1
- 239000003292 glue Substances 0.000 description 1
- 230000008447 perception Effects 0.000 description 1
- 230000010363 phase shift Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/491—Details of non-pulse systems
- G01S7/4912—Receivers
- G01S7/4913—Circuits for detection, sampling, integration or read-out
- G01S7/4914—Circuits for detection, sampling, integration or read-out of detector arrays, e.g. charge-transfer gates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/32—Systems determining position data of a target for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S17/36—Systems determining position data of a target for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated with phase comparison between the received signal and the contemporaneously transmitted signal
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
- G01S17/894—3D imaging with simultaneous measurement of time-of-flight at a 2D array of receiver pixels, e.g. time-of-flight cameras or flash lidar
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L27/00—Devices consisting of a plurality of semiconductor or other solid-state components formed in or on a common substrate
- H01L27/14—Devices consisting of a plurality of semiconductor or other solid-state components formed in or on a common substrate including semiconductor components sensitive to infrared radiation, light, electromagnetic radiation of shorter wavelength or corpuscular radiation and specially adapted either for the conversion of the energy of such radiation into electrical energy or for the control of electrical energy by such radiation
- H01L27/144—Devices controlled by radiation
- H01L27/146—Imager structures
- H01L27/14601—Structural or functional details thereof
- H01L27/14603—Special geometry or disposition of pixel-elements, address-lines or gate-electrodes
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L27/00—Devices consisting of a plurality of semiconductor or other solid-state components formed in or on a common substrate
- H01L27/14—Devices consisting of a plurality of semiconductor or other solid-state components formed in or on a common substrate including semiconductor components sensitive to infrared radiation, light, electromagnetic radiation of shorter wavelength or corpuscular radiation and specially adapted either for the conversion of the energy of such radiation into electrical energy or for the control of electrical energy by such radiation
- H01L27/144—Devices controlled by radiation
- H01L27/146—Imager structures
- H01L27/14601—Structural or functional details thereof
- H01L27/14609—Pixel-elements with integrated switching, control, storage or amplification elements
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L27/00—Devices consisting of a plurality of semiconductor or other solid-state components formed in or on a common substrate
- H01L27/14—Devices consisting of a plurality of semiconductor or other solid-state components formed in or on a common substrate including semiconductor components sensitive to infrared radiation, light, electromagnetic radiation of shorter wavelength or corpuscular radiation and specially adapted either for the conversion of the energy of such radiation into electrical energy or for the control of electrical energy by such radiation
- H01L27/144—Devices controlled by radiation
- H01L27/146—Imager structures
- H01L27/14643—Photodiode arrays; MOS imagers
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Electromagnetism (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Power Engineering (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Abstract
본 발명은 변조 신호로 씬(scene)에 조명을 비추도록 적응된 조명 시스템에 사용하기 위한 타임-오브-플라이트(Time-of-Flight; ToF) 시스템을 구동하는 방법에 관한 것이다. 이 때, 상기 ToF 시스템은 적어도 하나의 픽셀을 포함하는 이미징 센서를 가지며, 상기 픽셀은 상기 씬으로부터 반사된 변조 신호를 검출하기 위해 구동 신호들에 의해 구동되는 탭들을 포함하며, 본 방법은, 각각의 픽셀에 대해 : 적어도 제1 탭 쌍 및 제2 탭 쌍을 결정하는 단계; 및 상기 변조 신호의 미리 정해진 N 사이클 동안, 상기 반사된 변조 신호를 검출하기 위해 각각의 탭 쌍을 순차적으로 구동하는 단계를 포함한다.
Description
본 방법은 타임-오브-플라이트(Time-of-Flight; ToF) 시스템들에 대한 것이며, 더 상세하게는, 타임-오브-플라이트 시스템 구동 방법에 대한 것이다.
컴퓨터 시각(computer vision)은 이미지들을 취득, 처리, 분석 및 이해하기 위한 방법들을 포함하는 성장하는 연구 분야이다. 이 분야의 주요 주도적 아이디어는 씬(scene)의 이미지들을 컴퓨터로(electronically) 감지하고 이해함으로써 인간의 시각 능력을 복제하는 것이다. 특히, 컴퓨터 시각에 대한 연구 중 하나의 주제는 깊이 인식, 또는 환언하면, 3차원(3-D) 비젼(vision)이다.
카메라 및 데이터 처리 수단을 포함하는 타임-오브-플라이트(Time-of-Flight; ToF) 시스템들은 최근에 등장하였으며, 광원으로부터 물체(object)까지의 광(light)의 비행시간을 분석함으로써 씬(scene)의 3차원(3-D) 이미지들을 캡처할 수 있다. 그러한 카메라 시스템들은 고정된 포인트로부터의 깊이 또는 거리 정보가 판별될 필요가 있는 많은 응용 분야들에서 사용된다.
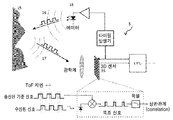
도 1에 도시된 ToF 시스템(3)의 기본적인 동작 원리는 펄스와 같이 변조된 광(16)으로 씬(15)에 조명을 비추는 것이다. 상기 변조된 광(16)은 그 씬(15) 내의 물체들로부터 반대로 반사되며, 그리고 렌즈가 그 반사된 광(17)을 모으며, 이미징 센서(35) 상에, 그리고 특히 상기 센서의 센서 평면상에, 상기 씬 내의 물체들의 이미지를 형성한다. 상기 카메라로부터 물체들까지의 거리에 따라, 상기 변조된 광의 방사, 예를 들면 펄스들의 방사, 그리고 상기 카메라에서의 상기 반사된 광의 수신 사이에 지연이 존재한다. 예를 들면, 상기 카메라로부터 2.5m 떨어진 물체는 16.66 ns의 시간 지연을 초래한다. 이러한 지연을 분석함으로써, 그리고 특히 상관관계(correlation) 계산을 구현함으로써, 상기 카메라로부터 상기 물체까지의 거리가 취득될 수 있다.
카메라로부터 물체들까지의 거리는 다음과 같이 계산될 수 있다. 명확히 하기 위해, 신호들의 예가 도 2에 주어진다. 변조 신호(16)(S)는 물체를 향해 송신된다. 상기 물체에서 반사된 후, 신호(17)(  )는 광검출기에 의해 감지된다. 이 신호(
)는 광검출기에 의해 감지된다. 이 신호(  )는 이동 시간 때문에 원 신호(original signal)(S)에 비해 위상
)는 이동 시간 때문에 원 신호(original signal)(S)에 비해 위상  만큼 위상-변이된다.
만큼 위상-변이된다.


그 다음, 두 개의 파라미터들 I 및 Q는 다음과 같이 계산된다 :

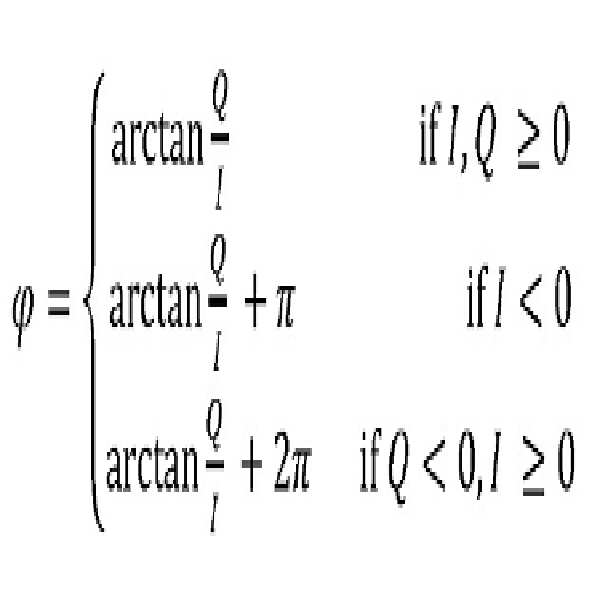
상기 위상  가 알려지면, 상기 카메라로부터 물체들까지의 거리
가 알려지면, 상기 카메라로부터 물체들까지의 거리  는 다음의 공식을 사용하여 획득될 수 있다 :
는 다음의 공식을 사용하여 획득될 수 있다 :
이 때,  는 변조 주파수이며, n은
는 변조 주파수이며, n은  의 정수(integer number)이다.
의 정수(integer number)이다.
방정식 1-4로부터, 이론상으로,  ,
,  ,
,  및
및  을 획득하기 위해 동일한 신호(
을 획득하기 위해 동일한 신호( )가 기준 신호들
)가 기준 신호들  ,
,  ,
,  및
및  각각과 상관되어야 한다는 것을 알 수 있다.
각각과 상관되어야 한다는 것을 알 수 있다.
실제로, ToF 측정들은 일반적으로 ToF 픽셀들의 배열을 포함하는 ToF 센서들에 의해 수행된다. 종래 기술에서, 각각의 픽셀들은 일반적으로 하나 또는 두 개의 “탭(tap)들”을 포함한다. “탭”은  와 같은 광 신호들에 노출될 때 전하들(charges)을 광생성하는데 사용되는, 제어 노드 및 검출 영역을 포함하는 컴포넌트이다. 픽셀 당 오직 하나 또는 두 개의 탭들을 갖는 사실은, 실제로,
와 같은 광 신호들에 노출될 때 전하들(charges)을 광생성하는데 사용되는, 제어 노드 및 검출 영역을 포함하는 컴포넌트이다. 픽셀 당 오직 하나 또는 두 개의 탭들을 갖는 사실은, 실제로,  의 측정이 순차적이라는 것을 수반한다. 예를 들어, 오직 하나의 탭만을 포함하는 픽셀은 I, Q, 그리고
의 측정이 순차적이라는 것을 수반한다. 예를 들어, 오직 하나의 탭만을 포함하는 픽셀은 I, Q, 그리고  를 계산하기 위해, 연속적인 4 개의 별개의 신호들(
를 계산하기 위해, 연속적인 4 개의 별개의 신호들(  )을 측정하여야한다. 이러한 구성들에서, 여러 노출들이 발생하며, 각각의 노출 사이에 상기 물체가 이동한 경우, 깊이 데이터
)을 측정하여야한다. 이러한 구성들에서, 여러 노출들이 발생하며, 각각의 노출 사이에 상기 물체가 이동한 경우, 깊이 데이터  에 오류가 생긴다.
에 오류가 생긴다.
픽셀 당 오직 하나 또는 두 개의 탭들을 사용한다는 사실은, 깊이 계산의 일관성 문제에 대해 문제가 있을 뿐만 아니라, 또한 설계 이유들로도 문제가 있다. 실제로, 여러 개별 신호들(  )이 측정된다면, 계산 단계들 전에 상기 신호들(
)이 측정된다면, 계산 단계들 전에 상기 신호들(  )을 저장하기 위해, 상기 센서 상의 또는 시스템 레벨에서의 픽셀들에 메모리가 추가되어야한다. 그러면, ToF 시스템들의 크기는 급격히 증가하게 된다.
)을 저장하기 위해, 상기 센서 상의 또는 시스템 레벨에서의 픽셀들에 메모리가 추가되어야한다. 그러면, ToF 시스템들의 크기는 급격히 증가하게 된다.
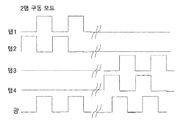
마지막으로, 단일 픽셀에 여러 탭들이 포함될 때, 탭들을 구동하는데 사용되는 구동 신호들은 종종 필요 대역폭이 너무 높아서 최적이 아니다. 하나의 탭에 다른 탭들에 대해 상대적으로 양의 전위가 인가될 때, 그 탭은 활성화되며, 검출능력(detectivity)이 높다. 이는, 상기 활성화된 탭의 검출 영역이 픽셀 내의 광생성된 소수 캐리어들 대부분을 수신하게 될 것이라는 것을 의미한다. 4-탭 픽셀 아키텍처를 사용하면, 도 3에 도시된 바와 같이, 직접적인 접근 방식은 변조 주기의 25%동안 네 개의 탭들 각각을 인에이블링(enabling)하는 것이다. 주파수가 50MHz인 송신된 변조 신호에 대해, 상기 4-탭 기기 탭들은 각각의 탭의 25% 듀티 사이클로 인해 100MHz와 상응하는 응답 시간을 필요로 할 것이다.
종래 기술에서 제시된 것에도 불구하고, ToF 시스템들의 크기와 상기 탭들에 대해 필요한 대역폭을 모두 줄이면서, ToF 시스템으로부터 물체까지의 비-편향된 거리들(non-based distances)을 측정하기 위한 방법 및 시스템이 제안되어야 한다.
본 발명은 먼저, 변조 신호로 씬(scene)에 조명을 비추도록 적응된 조명 시스템에 사용하기 위한 타임-오브-플라이트(Time-of-Flight; ToF) 시스템을 구동하는 방법에 관한 것이다. 이 때, 상기 ToF 시스템은 적어도 하나의 픽셀을 포함하는 이미징 센서를 가지며, 상기 픽셀은 상기 씬으로부터 반사된 변조 신호를 검출하기 위해 구동 신호들에 의해 구동되는 탭들을 포함하며, 본 방법은, 각각의 픽셀에 대해 : 적어도 제1 탭 쌍 및 제2 탭 쌍을 결정하는 단계; 및 상기 변조 신호의 미리 정해진 N 사이클 동안, 상기 반사된 변조 신호를 검출하기 위해 각각의 탭 쌍을 구동하는 단계를 포함한다.
각각의 탭 쌍은 상기 변조 신호의 N 사이클들의 시간 동안 50% 듀티 사이클에서 작동되며, 이로써 상기 탭들을 위해 필요한 대역폭을 감소시킬 수 있다는 것이 본 발명의 이점이다.
또한, 상관 측정치들을 판단할 때, 신호들(  )이 거의 동시에 측정되기 때문에 모션 견고성(motion robustness)이 개선된다는 것도 본 발명의 이점이다.
)이 거의 동시에 측정되기 때문에 모션 견고성(motion robustness)이 개선된다는 것도 본 발명의 이점이다.
또 다른 이점으로는, 각각의  데이터들을 저장하기 위한 메모리들이 더 이상 필요 없다는 것이며, 이로써 상기 ToF 시스템들의 크기를 감소시킬 수 있다.
데이터들을 저장하기 위한 메모리들이 더 이상 필요 없다는 것이며, 이로써 상기 ToF 시스템들의 크기를 감소시킬 수 있다.
또한 본 발명은, 변조 신호로 씬(scene)에 조명을 비추도록 적응된 조명 시스템에 사용하기 위한 타임-오브-플라이트(Time-of-Flight; ToF) 시스템에 관한 것이며, 이 때, 상기 ToF 시스템은 : 적어도 두 개의 픽셀들을 포함하는 이미징 센서로서, 각각의 픽셀은 탭들을 포함하는, 이미징 센서; 상기 탭들을 구동하기 위해 구동 신호들을 생성하는 신호 발생기; 및 상기 신호 발생기로부터 상기 구동 신호들을 수신하고 상기 구동 신호들을 상기 탭들에게 전송하도록 적응된 탭 드라이버들을 포함하며, 상기 ToF 시스템은 : 각각의 픽셀은 적어도 두 쌍의 탭들을 포함하며; 각각의 픽셀의 상기 두 쌍의 탭들의 각각의 탭은 서로 다른 드라이버들에 연결되며; 그리고 각각의 드라이버는 각각의 픽셀의 탭에 연결되며, 상기 각각의 드라이버에 연결된 상기 이미징 센서의 픽셀들의 탭들은 탭들의 세트를 형성하는 것을 특징으로 한다.
이 경우의 방법 및 시스템은, 바람직하게는 상기 변조 신호의 미리 정해진 N 사이클 동안, 탭들의 쌍들을 구동하는 것인 동일 발명 개념으로 연결되어 있다.
본 발명의 시스템의 이점으로는, 각각의 픽셀이 4 개의 탭들을 포함하여, 4개의 상관 측정값들을, 즉  ,
,  ,
,  및
및  을, 거의 동시에 판단할 수 있다는 것이다.
을, 거의 동시에 판단할 수 있다는 것이다.
본 발명의 다른 이점으로는, 각각의 픽셀은 다수의 대칭축들을 정의하도록 공간이 구성되어, 더 정확한 측정값들을 획득하는 것을 가능하게 한다는 것이다.
또 다른 이점으로는, 각각의 픽셀은 다수의 픽셀들끼리 회로를 공유할 수 있게 하는 8각형이어서, 이는 훨씬 더 정확한 측정값들을 획득할 수 있게 한다는 것이다.
본 발명은 다음의 상세한 설명 및 첨부 도면들을 고려하여 더 잘 이해될 것이다.
도 1은 ToF 시스템의 기본적인 동작 원리를 도시한다.
도 2는 ToF 시스템에서의 상관 측정값들을 결정하는데 사용되는 신호들의 예를 도시한다.
도 3은 일반적으로 사용되는 4-탭 구동 모드를 도시하며, 각각의 탭은 변조 주기 중 25% 동안 인에이블링된다.
도 4는 본 발명의 실시예에 따른 ToF 시스템을 도시한다.
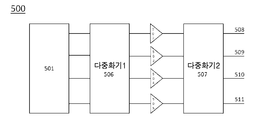
도 5는 다수의 탭 드라이버들(tap driver), 다수의 다중화기들 및 신호 발생기를 포함하는 구동 유닛을 도시한다.
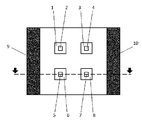
도 6은 본 발명의 실시예에 따른, 픽셀의 4-탭 토폴로지를 도시한다.
도 7은 도 6에 도시된 점선을 따르는 4-탭 픽셀의 단면도를 도시한다.
도 8은 본 발명의 다른 실시예에 따른, 픽셀의 4-탭 토폴로지를 도시한다.
도 9는 본 발명의 추가 실시예에 따른, 픽셀의 4-탭 토폴로지를 도시한다.
도 10은 본 발명의 실시예에 따른, 구동 신호들의 예를 도시한다.
본 발명의 이점들 및 신규한 특징들은 첨부 도면들을 참조한 다음의 상세한 설명으로부터 더욱 명백해질 것이다.
도 1은 ToF 시스템의 기본적인 동작 원리를 도시한다.
도 2는 ToF 시스템에서의 상관 측정값들을 결정하는데 사용되는 신호들의 예를 도시한다.
도 3은 일반적으로 사용되는 4-탭 구동 모드를 도시하며, 각각의 탭은 변조 주기 중 25% 동안 인에이블링된다.
도 4는 본 발명의 실시예에 따른 ToF 시스템을 도시한다.
도 5는 다수의 탭 드라이버들(tap driver), 다수의 다중화기들 및 신호 발생기를 포함하는 구동 유닛을 도시한다.
도 6은 본 발명의 실시예에 따른, 픽셀의 4-탭 토폴로지를 도시한다.
도 7은 도 6에 도시된 점선을 따르는 4-탭 픽셀의 단면도를 도시한다.
도 8은 본 발명의 다른 실시예에 따른, 픽셀의 4-탭 토폴로지를 도시한다.
도 9는 본 발명의 추가 실시예에 따른, 픽셀의 4-탭 토폴로지를 도시한다.
도 10은 본 발명의 실시예에 따른, 구동 신호들의 예를 도시한다.
본 발명의 이점들 및 신규한 특징들은 첨부 도면들을 참조한 다음의 상세한 설명으로부터 더욱 명백해질 것이다.
이제부터 본 발명은 4-탭 픽셀들에 관해 기술될 것이지만, 본 발명은 4-탭 픽셀들에 제한되지 않는다. 본 발명은 다수의 탭들을 포함하는, 바람직하게는 적어도 세 개의 탭들을 포함하는, 더 바람직하게는 4 개의 탭들을 포함하는, 픽셀들로 구현될 수 있다
도 4는 본 발명의 제1 실시예에 따른 타임-오브-플라이트(Time-of-Flight; ToF) 시스템(3)을 도시한다. 상기 ToF 시스템(3)은 여러 사이클로 이루어진 변조 광(16)으로 씬(scene)에 조명을 비추도록 적응된 조명 시스템(18)에 사용하기 위한 것이다. 상기 조명 유닛(18)은 상기 변조 광(16)을 방사하기 위해 하나 이상의 광원들을 포함할 수 있다. 상기 변조 광(16)은 주기적인 광일 수 있다. 상기 주기적 광은 파동 또는 펄스 또는 이 둘의 조합의 형태일 수 있다. 상기 광은 스펙트럼의 가시 영역 또는 비-가시 영역에 있을 수 있다. 예를 들어, 바람직하게는, 상기 광은 적외선 영역에 있어서, 센서들 시스템들이 효율적이고, 사람이 볼 수 없고, 그리고 LED들, 레이저들 등과 같은 적합한 광원들이 이용가능한 범위에 있을 수 있다.
상기 ToF 시스템(3)은 픽셀들(35a)의 배열을 포함하는 이미징 센서(35)를 포함하며, 상기 픽셀들 각각은 네 개의 탭들을 포함한다. 상기 이미징 센서(35)는 상기 씬으로부터 반사된 변조 신호(17)를 검출하기 위해 사용된다. 각각의 픽셀은 아래에서 각각 위-탭들(up-taps), 왼쪽-탭들(left-taps), 아래-탭들(down-taps), 오른쪽-탭들(right-taps)로 지명된 네 개의 탭들을 포함한다. 4-탭 픽셀들의 기본 설계 및 동작들은 후에 설명된다.
ToF 시스템(3)은 구동 신호들을 생성하는 신호 발생기(30)를 더 포함한다. 한 쌍당 구동하는 버스트 신호들은 상기 변조 신호의 사이클들의 미리 정해진 개수(N)일 수 있다. 상기 개수 N은 동작 중에 잠재적으로 조절될 수 있지만, 바람직하게는 상이한 탭 쌍 트라이버들에 대해 순간적으로 동일한 N으로 조절된다. 상기 신호 발생기(501)는 상기 조명 유닛에 의해 송신된 상기 변조 신호와 비교할 때 위상-변이된 신호들인 구동 신호들을 상기 탭들에게 제공하도록 적응될 수 있다. 구동 신호들은 상기 탭들의 동작들을 제어하기 위한, 즉 상기 탭들이 활성화되어있거나 비활성되어있는 경우 제어하기 위한 신호들이다. 탭이 활성화되어 있다면, 이는 그것이 신호, 즉 상기 씬으로부터 반사된 변조 신호(17)를 검출할 수 있다는 것을 의미한다. 상기 신호 발생기는 기본 클록(base clock) 또는 주파수 중에서 상이한 탭 신호들을 생성하는 블록일 수 있다. 이는 PLL 또는 DLL 또는 일부 글루 로직과 유사한 것일 수 있다.
상기 ToF 시스템(3)은 4 개의 탭 드라이버들(31a, 31b, 32a, 32b)을 더 포함하며, 각각의 탭 드라이버는 상기 신호 발생기(30)로부터의 구동 신호들을 수신하고 데이터 라인들(33a,33b, 34a, 34b)을 통해 그 구동 신호들을 상기 탭들에게 전송하도록 적응되어 있다. 각각의 탭 드라이버는 상기 신호 발생기(30)로부터 디지털 신호를 수신하며, 데이터 라인들을 통해, 올바른 전압 레벨들과 전류 밀도들로 상기 디지털 신호를 미리정해진 탭 세트에 전송한다.
상기 ToF 시스템은 각각의 픽셀이 적어도 두 쌍의 탭들을 포함하는 것을 특징으로 하며, 각각의 픽셀의 상기 두 쌍의 탭들은 각각 서로 다른 드라이버들에 연결되며, 그리고 각각의 드라이버는 각각의 픽셀의 탭에 연결되며, 상기 각각의 드라이버에 연결된 상기 이미징 센서의 픽셀들의 탭들은 탭들의 세트를 형성한다.
바람직하게는, 탭 드라이버들의 개수는 상기 픽셀 당 탭들의 개수 이상이다.
예를 들어, 도 4에서, 상기 데이터 라인들(33a,33b, 34a, 34b)은 탭 드라이버들을 미리정해진 탭 세트와 연결하는데 사용된다. 예를 들어, 도 4에서, 참조번호 32a의 탭 드라이버는 참조번호 34a의 데이터 라인을 통해 픽셀들(35a)의 왼쪽-탭들과 연관(associated)되며, 참조번호 31a의 탭 드라이버는 참조번호 33a의 데이터 라인을 통해 픽셀들(35a)의 위-탭들(up-taps)과 연관되며, 참조번호 32b의 탭 드라이버는 참조번호 34b의 데이터 라인을 통해 픽셀들(35a)의 오른쪽-탭들(up-taps)과 연관되며, 그리고 참조번호 31b의 탭 드라이버는 참조번호 33b의 데이터 라인을 통해 픽셀들(35a)의 아래-탭들(down-taps)과 연관된다. 이러한 구조가 의미하는 것은, 미리 정해진 탭 세트의 각각의 탭은 연관된 탭 드라이버로부터 동일한 구동 신호들을 수신한다는 것과, 상기 탭 세트는 상기 씬으로부터 반사된 동일한 변조 신호를 동시에 검출하는 것이 가능하다는 것이다.
도 5는 본 발명의 또 다른 실시예를 도시한다. 상기 ToF 시스템(3)은 상기 탭 드라이버들과 연관된 적어도 하나의 다중화기를 더 포함할 수 있다. 도 5는 네 개의 탭 드라이버들(502, 503, 504, 505), 두 개의 다중화기들(506, 507), 신호 발생기(501), 그리고 4개의 데이터 라인들(508, 509, 510, 511)을 포함하는 구동 유닛(500)을 도시한다. 상기 다중화기들(506, 507)은 상기 탭 드라이버들의 앞 및/또는 뒤에 연결된다. 상기 다중화기들은 상기 구동 신호들 내에 있을 수 있는 오프셋들 및 불일치들(mismatches)을 제거할 수 있다. 또한, 상기 다중화기들은 상기 탭 드라이버들의 입력 신호 및 출력 신호 모두 교환(permuting)하는 것을 가능하게 할 수 있다.
도 6은 픽셀의 4-탭 토폴로지를 도시한다. 상기 픽셀은 4 개의 복조 노드들 또는 탭들을 포함한다. 각각의 탭은 각각 제어 노드(즉, 기판 컨택트(substate contact))(1,3,5,7) 및 검출 영역(2,4,6,8)으로 구성된다. 또한 상기 픽셀은 상기 탭들과 결부된 회로들(9, 10)도 포함한다.
도 7은 도 6에 도시된 점선을 따르는 4-탭 픽셀의 단면도를 도시한다. 각각의 탭은 제어 노드(325)로 둘러싸진 검출 영역(326)으로 구성된다. 각각의 검출 영역(326)은 공핍 영역(327)에 연관될 수 있다. 참조번호 321 및 324의 요소들은 회로 요소들이다. 회로 요소들(321, 324) 및 제어 노드(325)는 고농도로 도핑된 영역들(p+)이며, 반면 상기 검출 영역(326)은 n-형 영역이다.
EP1513202 B1에서, 유사 기기가 제시되며, 이때 픽셀들은 오직 하나의 탭만을 포함한다. 동일한 물리적 원리들이 상기 4-탭 픽셀이 작동하는 방법을 설명하기 위해 본원에 적용 가능하다. 간단히 말해서, 상기 참조번호 321의 회로(또는 참조번호 324의 회로) 및 상기 제어 노드(325) 사이에 인가되는 포텐셜(potential)을 제어함으로써, 그와 연관된 탭의 검출능력을 제어하는 것을 가능하게 한다. 광자가 픽셀의 감광 영역 내에 입사할 때, 전자-홀 쌍(e-/h+)이 특정 위치에서 생성될 수 있다. 상기 전자-홀 쌍은 흐르고 있는 대부분의 전류와 연관된, 존재하는 전계에 의해 분리될 것이다. 이 전계는 상기 광생성된 소수 캐리어들이 상기 흐르고 있는 대부분의 전류와 반대 방향으로, 즉 참조번호 325의 영역을 향하여, 이동하도록 유발할 것이다. 확산에 의해, 마침내, 상기 소수 캐리어들은 상기 검출 영역(326)에 도착할 것이다.
근본적으로, 픽셀이 여러 탭들을 포함할 때, 그리고 하나의 탭에 나머지 탭들에 대한 양의 포텐셜이 인가될 때, 상기 탭은 활성화되며, 그리고 그 검출능력은 높다. 이는, 상기 활성화된 탭의 검출 영역이 상기 픽셀 내의 광생성된 소수 캐리어들 대부분을 수신하게 될 것이라는 것을 의미한다. 상기 구동 신호들, 즉 상기 탭들에 인가된 포텐셜 신호들은, 그들이 어느 탭이 활성화되고 언제 활성화될지를 제어하기 때문에, 중요하다.
도 8은 본 발명의 실시예에 따른, 픽셀의 4-탭 토폴로지를 도시한다. 상기 탭들은 다수의 대칭축들을 정의하도록 공간적으로 구성될 수 있다. 상기 탭들은 상기 거리들(101, 102)이 실질적으로 같도록 상기 픽셀 내에 공간적으로 구성될 수 있다. 이러한 거리들은 상기 컴포넌트들 사이의 이용 가능한 광학 영역에 의해 한정될 수 있다. 예를 들어, 상기 탭들의 검출 영역들 간의 거리들(103, 106, 109, 112)은 실질적으로 동일할 수 있다. 뿐만 아니라, 상기 검출 영역들 및 그와 가장 가까운 주변 회로 사이 거리들(102, 103, 105, 107, 108, 110, 111, 101, 102) 또한 실질적으로 동일할 수 있다. 상기 픽셀들 내부에 다수의 대칭축들을 정의하도록 상기 탭들을 공간적으로 구성한다는 사실은 유익하다. 실제로, 상기 탭들은 광학 영역의 동일 평면에 결부되며, 상기 주변 회로로부터 동일한 영향을 받는다. 이러한 공간적 구성은 상기 씬으로부터 반사된, 실질적으로 동일한 변조 신호들을 측정하는 것을 가능하게 한다. 즉, 이러한 공간적 구성은  과 실질적으로 동일한 4 개의 신호들(
과 실질적으로 동일한 4 개의 신호들(  )을 측정하는 것을 가능하게 한다.
)을 측정하는 것을 가능하게 한다.
도 9는 본 발명의 추가 실시예에 따른, 픽셀의 4-탭 토폴로지를 도시한다. 상기 ToF 시스템의 이미징 센서는 8각형 픽셀들을 포함할 수 있다. 각각의 픽셀은 회로(605, 606, 607, 608)에 의해 둘러싸진 4 개의 탭들(601, 602, 603, 604)을 포함할 수 있다. 상기 8각형 픽셀은 유익할 수 있다. 이러한 특정 모양은 여러 픽셀들과 탭들끼리 회로를 공유하는 것을 가능하게 하면서, 사용되는 기판의 표면 및 픽셀들의 광학 영역을 최적화한다. 또한, 상기 팔각형 모양은 픽셀들 내부에 여러 대칭 축들을 정의할 수 있으며, 이는 상기 씬으로부터 반사된 변조 신호들을 더 정확하게 측정하는 것을 도와준다.
또한 본 발명은 적어도 하나의 픽셀을 포함하는 이미징 센서를 갖는 타임-오브-플라이트(Time-of-Flight; ToF) 시스템을 구동하는 방법에 관한 것이며, 상기 픽셀은 구동 신호들에 의해 구동되는 다수의 탭들을 포함하며, 상기 타임-오브-플라이트(ToF) 시스템은 변조 신호로 씬(scene)에 조명을 비추도록 적응된 조명 시스템에 사용하기 위한 것이며, 상기 방법은 다음의 단계들을 포함하며, 이하 단계들은 각각의 픽셀에 대한 것이다 : 적어도 제1 탭 쌍 및 제2 탭 쌍을 결정하는 단계; 및 상기 변조 신호의 미리 정해진 N 사이클 동안, 상기 씬으로부터 반사된 상기 변조 신호를 검출하기 위해 각각의 탭 쌍을 구동하는 단계.
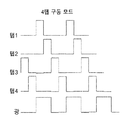
이해를 돕기 위해, 상기 방법은 탭1 내지 탭4로 설계된 4 개의 탭들을 포함하는 4-탭 픽셀에 관하여 설명될 것이지만, 상기 방법은 4-탭 픽셀에 한정되는 것이 아니다.
도 10은 상기 방법의 제2 단계 동안, 상기 탭들을 구동하기 위해 사용되는 구동 신호들의 예를 도시하며, 이 때 N은 2이다. 이 도면에서, 상기 변조 신호(16)는 “광”이라 불리는 신호로 표현되어있다.
본 방법의 제1 단계에 따르면, 제1 탭 쌍 및 제2 탭 쌍은 각각 (탭1, 탭2) 및 (탭3, 탭4)으로 결정된다.
본 방법의 제2 단계에 따르면, 상기 제1 탭 쌍(탭1, 탭2) 및 상기 제2 탭 쌍(탭3, 탭4)은 상기 변조 신호의 2번의 사이클 동안 상기 씬으로부터 반사된 변조 신호(17)를 검출하기 위해 구동된다.
바람직하게는, 한 쌍 중 제1 탭은 제1 구동 신호에 의해 구동되며, 상기 한 쌍 중 제2 탭은 상기 제1 구동 신호를 인버팅한 신호인 제2 구동 신호에 의해 구동된다. 이는 도 10에 도시되어 있다. 탭1 및 탭2(각각 탭3 및 탭4)의 구동 신호들은 인버팅된다. 즉, 상기 제2 구동 신호는 상기 제1 구동 신호에 비해 180도만큼 위상이 변이된다.
더 바람직하게는, 상기 제1 탭 쌍의 제1 구동 신호는 상기 조명 유닛에 의해 송신된 상기 변조 신호(16)의 N 사이클에 상응하며, 상기 제2 탭 쌍의 상기 제1 구동 신호는 상기 조명 유닛에 의해 송신된 상기 변조 신호(16)에 비해 90도 위상-변이된 신호의 N 사이클에 상응한다.
이 실시예 또한 도 10에 도시되어 있다. 실제로, 탭1의 구동 신호는 상기 변조 신호(16)(또는 “광”)의 2 사이클에 상응하며, 탭3의 구동 신호는 상기 변조 신호(16)에 비해 90도 위상-변이된 신호의 2 사이클에 상응한다.
특정 예에서, 탭1, 탭2, 탭3 및 탭4에 송신된 구동 신호들은 상기 조명 유닛에 의해 송신된 변조 신호에 비해 각각, 0도, 180도, 90도 및 270도 위상-변이된 신호의 2 사이클에 상응한다.
픽셀 당 Y개의 탭 쌍이 있는 경우, ‘y(0≤y≤(Y-1))'번째 쌍에 대한 구동 신호 및 상기 조명 유닛에 의해 송신된 변조 신호 간의 위상-변이는 각각의 다음 쌍을 위해 y*180도/Y일 수 있다.
이러한 특정 예에서, 상기 제1 탭 쌍은 2 사이클 동안 그들의 각각의 구동 신호들을 따르는 상기 반사된 변조 광(17)을 검출할 수 있으며, 그 다음, 순차적으로, 상기 제2 탭 쌍은 2 사이클 동안 그들의 각각의 구동 신호들을 따르는 상기 반사된 변조 광(17)을 검출할 수 있다. 한 쌍 당 탭들을 구동함으로써 상기 구동 신호들 간의 중첩을 방지할 수 있다. 이는, 하나의 픽셀 안에서, 한번에 오직 하나의 탭만이 활성화되며 이 때 나머지 탭들을 비활성화된다는 것을 의미한다. 이는 도 10에 명확히 도시되어 있다. 이 방법으로 인해, 상기 탭들을 위해 필요한 대역폭을 감소시킬 수 있으며, 상기 구동 신호들의 듀티 사이클을 감소시키는 것을 방지할 수 있다.
추가 실시예에서, 상기 타임-오브-플라이트 시스템은 기준 신호 및 상기 씬으로부터 반사된 변조 신호(17) 사이의 상관 측정값들을 판단하도록 더 적응될 수 있다. 상기 방법은 다음의 단계를 더 포함할 수 있으며, 다음의 단계는 각각의 결정된 탭 쌍에 대한 것이다 : 상기 씬으로부터 반사된 변조 신호(17) 및 제1 기준 신호 간의 제1 상관 측정값(correlation measurement), 그리고 상기 씬으로부터 반사된 변조 신호(17) 및 제2 기준 신호 간의 제2 상관 측정값을 판단하는 단계.
상기 제1 탭 쌍에 대해, 상기 제1 기준 신호는 상기 조명 유닛에 의해 송신된 상기 변조 신호(16)에 상응할 수 있으며, 상기 제2 기준 신호는 상기 제1 기준 신호가 인버팅된 신호일 수 있다.
상기 제2 탭 쌍에 대해, 상기 제1 기준 신호는 상기 조명 유닛에 의해 송신된 상기 변조 신호(16)와 비교할 때, 90도 위상-변이된 신호에 상응할 수 있으며, 상기 제2 기준 신호는 상기 제1 기준 신호가 인버팅된 신호일 수 있다.
이전에 도입된 표기법을 참조하여, 탭1은 상기 조명 유닛에 의해 송신된 상기 변조 신호(16)의 2사이클인 구동 신호에 의해 구동될 수 있으며, 탭2는 상기 조명 유닛에 의해 송신된 상기 변조 신호(16)와 비교할 때, 180도 위상-변이된 신호의 2사이클인 구동 신호에 의해 구동될 수 있다. 뿐만 아니라, 상기 제1 탭 쌍(탭1, 탭2)은 상관 측정값들(  ,
,  )을 획득하기 위해, 상기 씬으로부터 반사된 변조 신호(또는
)을 획득하기 위해, 상기 씬으로부터 반사된 변조 신호(또는  ) 및 기준 신호들(
) 및 기준 신호들(  ,
,  ) 간의 상관 측정값들을 판단할 수 있다. 탭1은
) 간의 상관 측정값들을 판단할 수 있다. 탭1은  의 측정에 기인할 수 있는 반면, 탭2는
의 측정에 기인할 수 있는 반면, 탭2는  의 측정에 기인할 수 있다.
의 측정에 기인할 수 있다.
이와 유사하게, 탭3은 상기 조명 유닛에 의해 송신된 상기 변조 신호와 비교할 때, 90도 위상-변이된 신호의 2 사이클인 구동 신호에 의해 구동될 수 있으며, 탭4는 상기 조명 유닛에 의해 송신된 상기 변조 신호와 비교할 때, 270도 위상-변이된 신호의 2 사이클인 구동 신호에 의해 구동될 수 있다. 뿐만 아니라, 상기 제2 탭 쌍(탭3, 탭4)은 상관 측정값들(  ,
,  )을 획득하기 위해, 상기 씬으로부터 반사된 변조 신호(또는
)을 획득하기 위해, 상기 씬으로부터 반사된 변조 신호(또는  ) 및 기준 신호들(
) 및 기준 신호들(  ,
,  ) 간의 상관 측정값들을 판단할 수 있다. 탭3은
) 간의 상관 측정값들을 판단할 수 있다. 탭3은  의 측정에 기인할 수 있는 반면, 탭4는
의 측정에 기인할 수 있는 반면, 탭4는  의 측정에 기인할 수 있다.
의 측정에 기인할 수 있다.
상기 방법은 거의 동시에 상기 4개의 탭들에 의해  를 측정하는 것을 가능하게 하며, 이는 상기 측정의 정확도와 신뢰도를 증가시키며, 모션 견고성(motion robustness)을 가능하게 한다. 바람직하게는, 높은 모션 견고성을 보장하기 위해, 상기 탭 쌍의 각각의 구동 간의 시간 간격은 가능한 짧아야 하며, 예를 들어, 상기 변조 광(16)의 8 순환 기간보다 작아야 한다. 바람직하게는, 상기 구동은 양자택일로 수행될 수 있다. 즉, 상기 제1 탭 쌍이 먼저 구동될 수 있고, 그 다음 상기 제2 탭 쌍이 구동될 수 있고, 그런 다음 상기 제1 탭 쌍이 다시 구동될 수 있다. 상기 검출은 주기적인 방법으로 각 쌍에 대한 N 사이클 후에 재개될 수 있다.
를 측정하는 것을 가능하게 하며, 이는 상기 측정의 정확도와 신뢰도를 증가시키며, 모션 견고성(motion robustness)을 가능하게 한다. 바람직하게는, 높은 모션 견고성을 보장하기 위해, 상기 탭 쌍의 각각의 구동 간의 시간 간격은 가능한 짧아야 하며, 예를 들어, 상기 변조 광(16)의 8 순환 기간보다 작아야 한다. 바람직하게는, 상기 구동은 양자택일로 수행될 수 있다. 즉, 상기 제1 탭 쌍이 먼저 구동될 수 있고, 그 다음 상기 제2 탭 쌍이 구동될 수 있고, 그런 다음 상기 제1 탭 쌍이 다시 구동될 수 있다. 상기 검출은 주기적인 방법으로 각 쌍에 대한 N 사이클 후에 재개될 수 있다.
상기 이미징 센서가 도 4에 도시된 바와 같이 여러 픽셀들을 포함한다면, 탭 세트에 송신되는 구동 신호들은 동일할 수 있다는 것이 이해되어야 한다. 예를 들어, 탭1에 송신된 구동 신호들은 전에 정의된 위-탭들에 송신된 구동 신호들에 상응할 수 있으며, 탭2에 송신된 구동 신호들은 아래-탭들에 송신된 구동 신호들에 상응할 수 있으며, 탭3에 송신된 구동 신호들은 오른쪽-탭들에 송신된 구동 신호들에 상응할 수 있으며, 그리고 탭4에 송신된 구동 신호들은 왼쪽-탭들에 송신된 구동 신호들에 상응할 수 있다.
뿐만 아니라, 제1 탭 쌍은 (위-탭들, 아래-탭들) 일 수 있으며, 제2 탭 쌍은 (오른쪽-탭들, 왼쪽-탭들)일 수 있다. 바람직하게는, 하나의 탭 쌍에 포함되어 있는 탭들은 픽셀들에서 대향하여 위치한다. 예를 들어, 상기 탭들이 픽셀 내에서 정사각형을 형성한다면, 하나의 탭 쌍에 포함된 탭들은 대각선 위치들에 배치되는 탭들일 것이다. 한 쌍의 탭들에 속하는 탭들은 동일한 픽셀에 속할 수 있다.
상기 위, 아래, 오른쪽 및 왼쪽이란 용어들은 제한하는 용어들이 아니며, 명확성을 위해 사용된 것임이 이해되어야 한다.
Claims (16)
- 변조 신호(16)로 씬(scene)(15)에 조명을 비추도록 적응된 조명 시스템(18)에 사용하기 위한 타임-오브-플라이트(Time-of-Flight; ToF) 시스템을 구동하는 방법으로서,
상기 ToF 시스템은 적어도 하나의 픽셀(35a)을 포함하는 이미징 센서(35)를 가지며,
상기 픽셀은 상기 씬으로부터 반사된 변조 신호(17)를 검출하기 위해 구동 신호들에 의해 구동되는 탭(tap)들을 포함하며,
본 방법은, 각각의 픽셀에 대해 :
- 적어도 제1 탭 쌍 및 제2 탭 쌍을 결정하는 단계; 및
- 상기 변조 신호(16)의 미리 정해진 N 사이클 동안, 상기 반사된 변조 신호(17)를 검출하기 위해 각각의 탭 쌍을 구동하는 단계를 포함하는, 타임-오브-플라이트 시스템 구동 방법. - 제1 항에 있어서,
상기 탭 쌍들은 순차적으로 구동되는, 타임-오브-플라이트 시스템 구동 방법. - 제1 항 또는 제2 항에 있어서,
한 쌍 중 제1 탭은 제1 구동 신호에 의해 구동되며,
상기 한 쌍 중 제2 탭은 상기 제1 구동 신호를 인버팅한 신호인 제2 구동 신호에 의해 구동되는, 타임-오브-플라이트 시스템 구동 방법. - 제3 항에 있어서,
상기 제1 탭 쌍의 상기 제1 구동 신호는 상기 조명 유닛에 의해 송신된 상기 변조 신호(16)의 N 사이클에 상응하는, 타임-오브-플라이트 시스템 구동 방법. - 제3 항 또는 제4 항에 있어서,
상기 제2 탭 쌍의 상기 제1 구동 신호는 상기 조명 유닛에 의해 송신된 상기 변조 신호(16)에 비해 90도 위상-변이된 신호의 N 사이클에 상응하는, 타임-오브-플라이트 시스템 구동 방법. - 제1 항 내지 제5 항 중 어느 한 항에 있어서,
상기 타임-오브-플라이트(ToF) 시스템은 기준 신호 및 상기 씬으로부터 반사된 변조 신호(17)간의 상관 측정값(correlation measurement)들을 판단하도록 더 적응되며,
상기 방법은 :
- 각각의 결정된 탭 쌍에 대해, 상기 씬으로부터 반사된 변조 신호(17) 및 제1 기준 신호 간의 제1 상관 측정값(correlation measurement), 그리고 상기 씬으로부터 반사된 변조 신호(17) 및 제2 기준 신호 간의 제2 상관 측정값을 판단하는 단계를 더 포함하는, 타임-오브-플라이트 시스템 구동 방법. - 제6 항에 있어서,
- 상기 제1 탭 쌍에 대해 :
상기 제1 기준 신호는 상기 조명 유닛에 의해 송신된 상기 변조 신호(16)에 상응하며, 그리고
상기 제2 기준 신호는 상기 제1 기준 신호를 인버팅한 신호이며; 그리고
- 상기 제2 탭 쌍에 대해 :
상기 제1 기준 신호는 상기 조명 유닛에 의해 송신된 상기 변조 신호(16)에 비해 90도 위상-변이된 신호에 상응하며, 그리고
상기 제2 기준 신호는 상기 제1 기준 신호를 인버팅한 신호인, 타임-오브-플라이트 시스템 구동 방법. - 제1 항 내지 제7 항 중 어느 한 항에 있어서,
각각의 픽셀은 4 개의 탭들을 포함하는, 타임-오브-플라이트 시스템 구동 방법. - 변조 신호(16)로 씬(scene)(15)에 조명을 비추도록 적응된 조명 시스템(18)에 사용하기 위한 타임-오브-플라이트(Time-of-Flight; ToF) 시스템으로서,
상기 ToF 시스템(3)은 :
- 적어도 두 개의 픽셀들(35a)을 포함하는 이미징 센서(35)로서, 각각의 픽셀은 탭들을 포함하는, 이미징 센서(35);
- 상기 탭들을 구동하기 위해 구동 신호들을 생성하는 신호 발생기(30, 501); 및
- 상기 신호 발생기(501, 30)로부터 상기 구동 신호들을 수신하고 상기 구동 신호들을 상기 탭들에게 전송하도록 적응된 탭 드라이버들(31a, 31b, 32a, 32b, 502, 503, 504, 505)을 포함하며,
- 각각의 픽셀은 적어도 두 쌍의 탭들을 포함하며;
- 각각의 픽셀의 상기 두 쌍의 탭들의 각각의 탭은 서로 다른 드라이버들에 연결되며; 그리고
- 각각의 드라이버는 각각의 픽셀의 탭에 연결되며, 상기 각각의 드라이버에 연결된 상기 이미징 센서의 픽셀들의 탭들은 탭들의 세트를 형성하는 것을 특징으로 하는, 타임-오브-플라이트 시스템. - 제9 항에 있어서,
상기 신호 발생기(30, 501)는 상기 조명 유닛(18)에 의해 송신된 상기 변조 신호(16)와 비교할 때 위상-변이된 신호들인 구동 신호들을 상기 탭들에게 제공하도록 적응되는, 타임-오브-플라이트 시스템. - 제9 항 또는 제10 항에 있어서,
상기 탭 드라이버들은 상기 변조 신호(16)의 미리 정해진 N 사이클 동안 상기 씬으로부터 반사된 변조 신호(17)를 검출하기 위해, 각각의 탭 쌍을 순차적으로 구동하도록 적응되는, 타임-오브-플라이트 시스템. - 제9 항 내지 제11 항 중 어느 한 항에 있어서,
상기 탭 드라이버들(502, 503, 504, 505)과 연관된(associated) 적어도 하나의 다중화기(506, 507)를 더 포함하는, 타임-오브-플라이트 시스템. - 제9 항 내지 제12 항 중 어느 한 항에 있어서,
각각의 픽셀은 네 개의 탭들을 포함하는, 타임-오브-플라이트 시스템. - 제9 항 내지 제13 항 중 어느 한 항에 있어서,
각각의 픽셀은 다수의 대칭축들을 정의하도록 공간이 구성되는, 타임-오브-플라이트 시스템. - 제14 항에 있어서,
각각의 픽셀은 8각형인, 타임-오브-플라이트 시스템. - 제9 항 내지 제15 항 중 어느 한 항에 있어서,
상기 탭 드라이버들의 개수는 상기 픽셀 당 탭들의 개수 이상인, 타임-오브-플라이트 시스템.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14150922.4 | 2014-01-13 | ||
| EP14150922.4A EP2894492B1 (en) | 2014-01-13 | 2014-01-13 | A method for driving a time-of-flight system |
| PCT/EP2015/050195 WO2015104307A1 (en) | 2014-01-13 | 2015-01-08 | A method for driving a time-of-flight system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20160032014A true KR20160032014A (ko) | 2016-03-23 |
Family
ID=49955917
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020157035188A KR20160032014A (ko) | 2014-01-13 | 2015-01-08 | 타임 오브 플라이트 시스템 구동 방법 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US10509126B2 (ko) |
| EP (2) | EP3792662A1 (ko) |
| JP (1) | JP6529487B2 (ko) |
| KR (1) | KR20160032014A (ko) |
| CN (1) | CN105518485B (ko) |
| BE (1) | BE1022490B1 (ko) |
| WO (1) | WO2015104307A1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180023786A (ko) * | 2016-08-26 | 2018-03-07 | 삼성전자주식회사 | 범위 측정을 위한 진폭 변조를 사용하는 전파 시간 이미지 센서 |
| US10861886B2 (en) | 2018-10-05 | 2020-12-08 | Samsung Electronics Co., Ltd. | Image sensor and image processing system having pixel structure to improve demodulation contrast performance |
Families Citing this family (40)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3363050B1 (en) | 2015-07-23 | 2020-07-08 | Artilux Inc. | High efficiency wide spectrum sensor |
| US10761599B2 (en) | 2015-08-04 | 2020-09-01 | Artilux, Inc. | Eye gesture tracking |
| US10707260B2 (en) | 2015-08-04 | 2020-07-07 | Artilux, Inc. | Circuit for operating a multi-gate VIS/IR photodiode |
| EP3370259B1 (en) | 2015-08-04 | 2020-03-11 | Artilux Inc. | Germanium-silicon light sensing apparatus |
| US10861888B2 (en) | 2015-08-04 | 2020-12-08 | Artilux, Inc. | Silicon germanium imager with photodiode in trench |
| EP3341970B1 (en) | 2015-08-27 | 2020-10-07 | Artilux Inc. | Wide spectrum optical sensor |
| US10418407B2 (en) | 2015-11-06 | 2019-09-17 | Artilux, Inc. | High-speed light sensing apparatus III |
| US10741598B2 (en) | 2015-11-06 | 2020-08-11 | Atrilux, Inc. | High-speed light sensing apparatus II |
| US10886309B2 (en) | 2015-11-06 | 2021-01-05 | Artilux, Inc. | High-speed light sensing apparatus II |
| US10739443B2 (en) | 2015-11-06 | 2020-08-11 | Artilux, Inc. | High-speed light sensing apparatus II |
| US10254389B2 (en) | 2015-11-06 | 2019-04-09 | Artilux Corporation | High-speed light sensing apparatus |
| EP3193369B1 (en) * | 2016-01-15 | 2021-11-17 | Sony Depthsensing Solutions N.V. | A detector device with majority current and isolation means |
| EP3193190B1 (en) * | 2016-01-15 | 2023-04-12 | Sony Depthsensing Solutions N.V. | A detector device with majority current and a circuitry for controlling the current |
| CN107851656B (zh) | 2016-03-04 | 2022-12-16 | 索尼公司 | 摄像装置和测距系统 |
| WO2018100082A1 (en) | 2016-11-30 | 2018-06-07 | Sony Semiconductor Solutions Corporation | Apparatus and method |
| EP3552044B1 (en) | 2016-12-07 | 2023-05-24 | Sony Semiconductor Solutions Corporation | Time-of-flight imaging apparatus and method |
| CN109729759B (zh) * | 2017-08-30 | 2021-09-17 | 索尼半导体解决方案公司 | 成像元件和成像装置 |
| US11592536B2 (en) | 2018-01-10 | 2023-02-28 | Sony Semiconductor Solutions Corporation | Control of image capture |
| US11482553B2 (en) | 2018-02-23 | 2022-10-25 | Artilux, Inc. | Photo-detecting apparatus with subpixels |
| US11105928B2 (en) | 2018-02-23 | 2021-08-31 | Artilux, Inc. | Light-sensing apparatus and light-sensing method thereof |
| WO2019165220A1 (en) | 2018-02-23 | 2019-08-29 | Artilux, Inc. | Photo-detecting apparatus and photo-detecting method thereof |
| TWI758599B (zh) | 2018-04-08 | 2022-03-21 | 美商光程研創股份有限公司 | 光偵測裝置 |
| TWI795562B (zh) | 2018-05-07 | 2023-03-11 | 美商光程研創股份有限公司 | 雪崩式之光電晶體 |
| US10969877B2 (en) | 2018-05-08 | 2021-04-06 | Artilux, Inc. | Display apparatus |
| KR102606240B1 (ko) * | 2018-07-09 | 2023-11-24 | 삼성전자주식회사 | 멀티탭 픽셀을 포함하는 이미지 센서 |
| KR102534247B1 (ko) | 2018-10-01 | 2023-05-18 | 삼성전자주식회사 | 편광판을 포함한 3d 이미지 센서, 및 그 3d 이미지 센서를 기반으로 한 깊이 보정방법과 3d 영상 생성방법 |
| KR102562360B1 (ko) * | 2018-10-05 | 2023-08-02 | 엘지이노텍 주식회사 | 깊이 정보를 획득하는 방법 및 카메라 모듈 |
| US11506763B2 (en) | 2018-10-31 | 2022-11-22 | Infineon Technologies Ag | Image sensor with interleaved hold for single-readout depth measurement |
| US11574942B2 (en) | 2018-12-12 | 2023-02-07 | Artilux, Inc. | Semiconductor device with low dark noise |
| US11798960B2 (en) * | 2019-03-13 | 2023-10-24 | Sony Semiconductor Solutions Corporation | Processing circuit and method for time-of-flight image sensor |
| WO2020193161A1 (en) * | 2019-03-25 | 2020-10-01 | Sony Semiconductor Solutions Corporation | Time-of-flight apparatus and method |
| JP7536757B2 (ja) | 2019-05-24 | 2024-08-20 | ソニーセミコンダクタソリューションズ株式会社 | 固体撮像装置及び測距装置 |
| CN110320528B (zh) * | 2019-06-14 | 2021-04-30 | 奥比中光科技集团股份有限公司 | 时间深度相机及多频调制解调的降低噪声的距离测量方法 |
| CN110361751B (zh) * | 2019-06-14 | 2021-04-30 | 奥比中光科技集团股份有限公司 | 时间飞行深度相机及单频调制解调的降低噪声的距离测量方法 |
| CN114930192B (zh) * | 2019-08-21 | 2024-04-19 | 亮锐有限责任公司 | 红外成像组件 |
| JP7310010B2 (ja) | 2019-08-28 | 2023-07-18 | アーティラックス・インコーポレイテッド | 低暗電流による光検出装置 |
| DE102019131988A1 (de) | 2019-11-26 | 2021-05-27 | Sick Ag | 3D-Lichtlaufzeitkamera und Verfahren zur Erfassung dreidimensionaler Bilddaten |
| US11380004B2 (en) * | 2019-12-13 | 2022-07-05 | Sony Semiconductor Solutions Corporation | Imaging devices and decoding methods thereof for determining distances to objects |
| KR20210151497A (ko) * | 2020-06-05 | 2021-12-14 | 에스케이하이닉스 주식회사 | 이미지 센싱 장치 |
| KR20220010192A (ko) * | 2020-07-17 | 2022-01-25 | 삼성전자주식회사 | 다기능 비행 거리 센서 및 그 동작 방법 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| MXPA99002142A (es) * | 1996-09-05 | 2004-08-27 | Rudolf Schwarte | Metodo y aparato para determinar la informacion defase y/o amplitud de una onda electromagnetica. |
| EP2023399B1 (en) | 2003-09-02 | 2020-01-08 | Sony Depthsensing Solutions SA/NV | Photonic Mixer |
| CA2631468C (en) * | 2006-10-18 | 2013-07-09 | Matsushita Electric Works, Ltd. | Spatial information detecting apparatus |
| JP5171158B2 (ja) | 2007-08-22 | 2013-03-27 | 浜松ホトニクス株式会社 | 固体撮像装置及び距離画像測定装置 |
| US20090051984A1 (en) * | 2007-08-23 | 2009-02-26 | O'brien Michele | Image sensor having checkerboard pattern |
| CN102027388B (zh) * | 2008-04-11 | 2013-08-28 | 瑞士联邦理工大学,洛桑(Epfl) | 采用显示器作为照明源的基于飞行时间的成像系统 |
| JP5431810B2 (ja) * | 2009-07-03 | 2014-03-05 | 株式会社豊田中央研究所 | 画像センサとその画像センサに用いられる受光装置 |
| JP5629134B2 (ja) * | 2010-06-14 | 2014-11-19 | パナソニック株式会社 | 電荷結合素子の駆動装置、空間情報検出装置 |
| KR101862914B1 (ko) * | 2012-12-28 | 2018-05-31 | 노키아 테크놀로지스 오와이 | 거리 감지 카메라로부터의 데이터에서 노이즈를 제거하기 위한 방법 및 장치 |
-
2014
- 2014-01-13 EP EP20201875.0A patent/EP3792662A1/en not_active Withdrawn
- 2014-01-13 EP EP14150922.4A patent/EP2894492B1/en active Active
- 2014-02-28 BE BE2014/0136A patent/BE1022490B1/fr not_active IP Right Cessation
-
2015
- 2015-01-08 WO PCT/EP2015/050195 patent/WO2015104307A1/en active Application Filing
- 2015-01-08 US US14/897,275 patent/US10509126B2/en active Active
- 2015-01-08 KR KR1020157035188A patent/KR20160032014A/ko not_active Application Discontinuation
- 2015-01-08 JP JP2016518541A patent/JP6529487B2/ja active Active
- 2015-01-08 CN CN201580001003.XA patent/CN105518485B/zh active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180023786A (ko) * | 2016-08-26 | 2018-03-07 | 삼성전자주식회사 | 범위 측정을 위한 진폭 변조를 사용하는 전파 시간 이미지 센서 |
| US10861886B2 (en) | 2018-10-05 | 2020-12-08 | Samsung Electronics Co., Ltd. | Image sensor and image processing system having pixel structure to improve demodulation contrast performance |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2894492B1 (en) | 2020-10-28 |
| JP2016527482A (ja) | 2016-09-08 |
| US20160306045A1 (en) | 2016-10-20 |
| EP2894492A1 (en) | 2015-07-15 |
| CN105518485A (zh) | 2016-04-20 |
| CN105518485B (zh) | 2018-11-13 |
| BE1022490B1 (fr) | 2016-05-04 |
| WO2015104307A1 (en) | 2015-07-16 |
| JP6529487B2 (ja) | 2019-06-12 |
| US10509126B2 (en) | 2019-12-17 |
| EP3792662A1 (en) | 2021-03-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20160032014A (ko) | 타임 오브 플라이트 시스템 구동 방법 | |
| US11561085B2 (en) | Resolving multipath interference using a mixed active depth system | |
| US10091492B2 (en) | Imaging apparatuses and a time of flight imaging method | |
| US10101453B2 (en) | Time of flight apparatuses and an illumination source | |
| CN106911888B (zh) | 一种装置 | |
| KR102136850B1 (ko) | 깊이 센서, 및 이의 동작 방법 | |
| US9081095B2 (en) | Range image sensor | |
| KR20110059253A (ko) | 거리 정보를 감지할 수 있는 이미지 센서 | |
| JP2017201760A (ja) | 撮像装置および測距装置 | |
| CN112946686B (zh) | 飞行时间感测系统及其中使用的图像传感器 | |
| US11290673B2 (en) | Sensor operating based on measuring range of depth and sensing system including the same | |
| CN113030999B (zh) | 飞行时间感测系统和其中使用的图像传感器 | |
| US20220018946A1 (en) | Multi-function time-of-flight sensor and method of operating the same | |
| JP2023001122A (ja) | 撮像装置 | |
| WO2021049151A1 (ja) | 距離測定装置及び該装置における測距機構のずれ調整方法 | |
| US8614411B2 (en) | 2D/3D dual-mode image sensing circuitry with a pull-down unit | |
| JP6238229B2 (ja) | 視差センサ及び相関信号の生成方法 | |
| US20240129630A1 (en) | Image-capturing system, image-capturing device, and image-capturing method | |
| JP2017133931A (ja) | 画像生成装置、ならびに距離画像およびカラー画像の生成方法 | |
| KR20160038842A (ko) | 촬상 장치 및 촬상 방법 | |
| JP2022165344A (ja) | 測距装置及び測距システム | |
| EP2138865A1 (en) | Method and device for recording 3D images of a scene |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| AMND | Amendment | ||
| E601 | Decision to refuse application | ||
| E601 | Decision to refuse application | ||
| E801 | Decision on dismissal of amendment |