KR20150127147A - Gnss(global navigation satellite system) 실내 신호들의 사용을 가능하게 하는 방법 및 장치 - Google Patents
Gnss(global navigation satellite system) 실내 신호들의 사용을 가능하게 하는 방법 및 장치 Download PDFInfo
- Publication number
- KR20150127147A KR20150127147A KR1020157027136A KR20157027136A KR20150127147A KR 20150127147 A KR20150127147 A KR 20150127147A KR 1020157027136 A KR1020157027136 A KR 1020157027136A KR 20157027136 A KR20157027136 A KR 20157027136A KR 20150127147 A KR20150127147 A KR 20150127147A
- Authority
- KR
- South Korea
- Prior art keywords
- mobile device
- gnss
- indoor
- indoor position
- determining
- Prior art date
Links
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/45—Determining position by combining measurements of signals from the satellite radio beacon positioning system with a supplementary measurement
- G01S19/46—Determining position by combining measurements of signals from the satellite radio beacon positioning system with a supplementary measurement the supplementary measurement being of a radio-wave signal type
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
- G01S19/24—Acquisition or tracking or demodulation of signals transmitted by the system
- G01S19/25—Acquisition or tracking or demodulation of signals transmitted by the system involving aiding data received from a cooperating element, e.g. assisted GPS
- G01S19/258—Acquisition or tracking or demodulation of signals transmitted by the system involving aiding data received from a cooperating element, e.g. assisted GPS relating to the satellite constellation, e.g. almanac, ephemeris data, lists of satellites in view
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
- G01S19/34—Power consumption
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/48—Determining position by combining or switching between position solutions derived from the satellite radio beacon positioning system and position solutions derived from a further system
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Navigation (AREA)
Abstract
GNSS(global navigation satellite system) 실내 신호들의 사용을 가능하게 하기 위한 장치들 및 방법들이 개시된다. 방법은, 실내 트랜시버 신호들에 기초하여 모바일 디바이스의 제 1 실내 포지션을 결정하는 단계를 포함할 수 있다. 방법은 또한, 결정된 제 1 실내 포지션에 적어도 부분적으로 기초하여, GNSS(global navigation satellite system) 포지셔닝 신호들이 이용가능함을 결정하는 단계를 포함할 수 있다. 방법은 또한, GNSS 포지셔닝 신호들에 적어도 부분적으로 기초하여, 상기 모바일 디바이스의 제 2 실내 포지션을 결정하는 단계를 포함할 수 있다.
Description
[0001] GNSS(Global Navigation Satellite System) 수신기들은 전자 디바이스의 포지션을 결정하는데 이용될 수 있다. GNSS 수신기들은 GNSS 위성들로부터 GNSS 신호들, 예컨대 GPS(Global positioning System), 갈릴레오(Galileo), 글로나스(Glonass) 또는 컴파스(Compass) 신호들을 수신한다. 수신된 GNSS 신호들에 기초하여, 전자 디바이스의 포지션이 계산될 수 있다. 그러나 GNSS 신호들은 일반적으로 실내 환경들에서 이용가능하지 않거나, 크게 약화되는데, 이는 GNSS 신호들은 물리적 구조물들을 투과(penetrate)하도록 설계되지 않았기 때문이다.
[0002] 실내 환경들에서, 전자 디바이스는 그럼에도 자신의 포지션을 결정할 수있다. 전자 디바이스는 WiFi(wireless fidelity) 액세스 포인트(AP)들로부터 수신된 신호들에 기초하여 자신의 포지션을 결정할 수 있다. 예를 들어, 하나 또는 그 초과의 WiFi AP들의 포지션들을 수신하고, WI-FI AP들 포지션들로부터 전자 디바이스의 포지션을 삼변측량하도록 시도함으로써, 근사(approximate) 로케이션이 결정될 수 있다. 일부 조건들에서, 실내 트랜시버 신호들, 예컨대 WiFi 액세스 포인트 신호들에 부가하여, 또는 예컨대 WiFi 신호들 또는 다른 실내 트랜시버 신호들이 신뢰성이 없거나 이용가능하지 않은 일부 상황들에서는, 실내 트랜시버 신호들 대신에, GNSS 신호들을 이용하는 것이 유용할 수 있다. 그러나 수신이 없에도 불구하고 전자 디바이스의 GNSS 수신기에 전력이 가해진 상태로 있거나, GNSS 위성 수신에 대해 테스트하기 위해 전자 디바이스의 GNSS 수신기들에 끊임없이 전력이 가해지는 것은, 제한된 전자 디바이스의 전력 및 컴퓨팅 자원들을 소비한다.
[0003] 본원에 설명되는 것처럼, 모바일 디바이스에 의한 실내 포지션 결정을 위한 방법의 예는, 실내 트랜시버 신호들에 기초하여 모바일 디바이스의 제 1 실내 포지션을 결정하는 단계; 결정된 제 1 실내 포지션에 적어도 부분적으로 기초하여, GNSS(global navigation satellite system) 포지셔닝 신호들이 가시적임을 결정하는 단계; 및 GNSS 포지셔닝 신호들에 적어도 부분적으로 기초하여, 모바일 디바이스의 제 2 실내 포지션을 결정하는 단계를 포함한다.
[0004] 본원에 설명된 것처럼, 실내 포지션 결정을 가능하게 하기 위한 모바일 디바이스의 예는, 포지션 추정 엔진 및 검출기를 저장하는 메모리; GNSS 수신기; 및 메모리 및 GNSS 수신기와 커플링되는 프로세서를 포함하며, 상기 프로세서는, 포지션 추정 엔진 및 검출기를 실행시켜, 실내 트랜시버 신호들에 기초하여 모바일 디바이스의 제 1 실내 포지션을 결정하고, 결정된 제 1 실내 포지션에 적어도 부분적으로 기초하여, GNSS(global navigation satellite system) 포지셔닝 신호들이 가시적임을 결정하고, 그리고 GNSS 포지셔닝 신호들에 적어도 부분적으로 기초하여 모바일 디바이스의 제 2 실내 포지션을 결정하도록 구성된다.
[0005] 본원에 설명된 것처럼 컴퓨터 판독가능한 저장 매체의 예는, 프로세서에 의해 실행될 때, 프로세서로 하여금, 실내 트랜시버 신호들에 기초하여 모바일 디바이스의 제 1 실내 포지션을 결정하게 하고; 결정된 제 1 실내 포지션에 적어도 부분적으로 기초하여, GNSS 포지셔닝 신호들이 가시적임을 결정하게 하고; 그리고 GNSS 포지셔닝 신호들에 적어도 부분적으로 기초하여, 모바일 디바이스의 제 2 실내 포지션을 결정하게 하는, 모바일 디바이스에 의한 실내 포지션 결정을 위한 코드를 포함한다.
[0006] 본원에 설명된 것처럼 모바일 디바이스에 의한 실내 포지션 결정을 위한 시스템의 예는, 실내 트랜시버 신호들에 기초하여 모바일 디바이스의 제 1 실내 포지션을 결정하기 위한 수단; 결정된 제 1 실내 포지션에 적어도 부분적으로 기초하여, GNSS 포지셔닝 신호들이 가시적임을 결정하기 위한 수단; 및 GNSS 포지셔닝 신호들에 적어도 부분적으로 기초하여, 모바일 디바이스의 제 2 실내 포지션을 결정하기 위한 수단을 포함한다.
[0007] 본원에 설명된 것처럼 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하기 위한 서버 컴퓨터 시스템에 대한 방법의 예는, 물리적 구조물의 맵을 수신하는 단계 ―상기 맵은 적어도, 물리적 구조물의 실세계 레이아웃을 표시하는 데이터를 포함함―; GNSS(global navigation satellite system) 포지셔닝 신호들이 물리적 구조물내의 대응하는 실세계 포지션에서 모바일 디바이스에 가시적인, 맵에 관한 적어도 하나의 포지션을 포함하는 GNSS 신호 가시성 데이터를 결정하기 위해 맵을 분석하는 단계; 및 모바일 디바이스로부터의 요청에 응답하여 모바일 디바이스에 GNSS 신호 가시성 데이터를 제공하는 단계를 포함한다.
[0008] 본원에 설명된 것처럼 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하기 위한 서버 컴퓨터 시스템의 예는, 디렉토리 보조 엔진, 구조물 맵 분석 엔진, 및 물리적 구조물의 맵을 저장하는 메모리; 및 메모리와 커플링되는 프로세서를 포함하며, 상기 프로세서는 디렉토리 보조 엔진 및 구조물 맵 분석 엔진을 실행시켜 물리적 구조물의 맵을 수신하고 ―상기 맵은 적어도 물리적 구조물의 실세계 레이아웃을 표시하는 데이터를 포함함―, GNSS(global navigation satellite system) 포지셔닝 신호들이 물리적 구조물내의 대응하는 실세계 포지션에서 모바일 디바이스에 가시적인, 맵에 관한 적어도 하나의 포지션을 포함하는 GNSS 신호 가시성 데이터를 결정하기 위해 맵을 분석하고, 모바일 디바이스로부터의 요청에 응답하여 모바일 디바이스에 GNSS 신호 가시성 데이터를 제공하도록 구성된다.
[0009] 본원에 설명된 컴퓨터 판독가능한 저장 매체의 예는, 프로세서에 의해 실행될 때, 프로세서로 하여금, 물리적 구조물의 맵을 수신하고 ―상기 맵은 적어도 물리적 구조물의 실세계 레이아웃을 표시하는 데이터를 포함함―; 물리적 구조물내의 대응하는 실세계 포지션에서 GNSS 포지셔닝 신호들이 모바일 디바이스에 가시적인, 맵에 관한 적어도 하나의 포지션을 포함하는 GNSS 신호 가시성 데이터를 결정하기 위해 맵을 분석하게 하고; 그리고 모바일 디바이스로부터의 요청에 응답하여 모바일 디바이스에 GNSS 신호 가시성 데이터를 제공하게 하는, 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하는 코드를 포함한다.
[0010] 본원에 설명된 것처럼 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하기 위한 서버 컴퓨터 시스템에 대한 시스템의 예는, 물리적 구조물의 맵을 수신하기 위한 수단 ―상기 맵은 적어도 물리적 구조물의 실세계 레이아웃을 표시하는 데이터를 포함함―; 물리적 구조물내의 대응하는 실세계 포지션에서 GNSS 포지셔닝 신호들이 모바일 디바이스에 가시적인, 맵에 관한 적어도 하나의 포지션을 포함하는 GNSS 신호 가시성 데이터를 결정하기 위해 맵을 분석하기 위한 수단; 및 모바일 디바이스로부터의 요청에 응답하여 모바일 디바이스에 GNSS 신호 가시성 데이터를 제공하기 위한 수단을 포함한다.
[0011] 도 1은 실내 GNSS 신호들의 사용을 가능하게 하기 위한 예시적 시스템 아키텍처의 블록도이다;
[0012] 도 2는 모바일 디바이스 및 보조 데이터 서버의 일 실시예의 블록도이다;
[0013] 도 3a는 물리적 구조물의 내부의 상세한 맵의 예이다;
[0014] 도 3b는 물리적 구조물의 내부의 상세한 맵의 또 다른 예이다;
[0015] 도 4는 모바일 디바이스에 의한 실내 포지션 결정을 위한 방법의 일 실시예에 대한 흐름도이다;
[0016] 도 5a는 GNSS 신호 가시성을 결정하기 위해 물리적 구조물의 맵을 분석하기 위한 방법의 일 실시예에 대한 흐름도이다;
[0017] 도 5b는 모바일 디바이스에 GNSS 신호 가시성 데이터를 송신하기 위한 방법의 일 실시예에 대한 흐름도이다;
[0018] 도 6은 모바일 디바이스가 물리적 구조물 내부에서 GNSS 신호들을 이용하는 것을 가능하게 하기 위한 방법의 일 실시예에 대한 흐름도이다; 그리고
[0019] 도 7은 GNSS 신호 가시성 데이터를 정제(refining)하기 위한 방법의 일 실시예에 대한 흐름도이다.
[0012] 도 2는 모바일 디바이스 및 보조 데이터 서버의 일 실시예의 블록도이다;
[0013] 도 3a는 물리적 구조물의 내부의 상세한 맵의 예이다;
[0014] 도 3b는 물리적 구조물의 내부의 상세한 맵의 또 다른 예이다;
[0015] 도 4는 모바일 디바이스에 의한 실내 포지션 결정을 위한 방법의 일 실시예에 대한 흐름도이다;
[0016] 도 5a는 GNSS 신호 가시성을 결정하기 위해 물리적 구조물의 맵을 분석하기 위한 방법의 일 실시예에 대한 흐름도이다;
[0017] 도 5b는 모바일 디바이스에 GNSS 신호 가시성 데이터를 송신하기 위한 방법의 일 실시예에 대한 흐름도이다;
[0018] 도 6은 모바일 디바이스가 물리적 구조물 내부에서 GNSS 신호들을 이용하는 것을 가능하게 하기 위한 방법의 일 실시예에 대한 흐름도이다; 그리고
[0019] 도 7은 GNSS 신호 가시성 데이터를 정제(refining)하기 위한 방법의 일 실시예에 대한 흐름도이다.
[0020] 본원에서 이용되는 용어 "예시적인" 또는 "예"는 "예, 예증 또는 예시로서 기능하는"을 의미한다. "예시적인"으로서 또는 "예"로서 본원에 설명된 임의의 양상 또는 실시예가 반드시 다른 양상들 또는 실시예들에 비해 선호되거나 유리한 것으로 해석되는 것은 아니다.
[0021] 도 1은 실내 GNSS 신호들의 사용을 가능하게 하기 위한 예시적인 시스템 아키텍처의 블록도이다. 일 실시예에서, 시스템(100)은 물리적 구조물(120)내에 모바일 디바이스(110)를 포함한다. 일 실시예에서, 모바일 디바이스(110)는 모바일 컴퓨팅 디바이스, 예컨대 모바일 전화, 개인용 정보 단말기, 테블릿 컴퓨터 등일 수 있다. 일 실시예에서, 물리적 구조물(120)은 쇼핑 몰, 에이비어리(aviary), 공항, 식품점, 사옥(company building), 또는 임의의 다른 물리적 구조물일 수 있다.
[0022] 본원에 제시되는 기술들은 위성-기반 포지셔닝을 위한, GNSS 데이터, 예컨대 갈릴레오, 글로나스 또는 컴파스 데이터의 사용으로 제한되지 않는다. 예를 들어, 본원에 제공되는 기술들은 다양한 지역 시스템들, 예컨대, 예를 들어, 일본에 걸친 QZSS(Quasi-Zenith Satellite System), 인도에 걸친 IRNSS(Indian Regional Navigational Satellite System), 중국에 걸친 베이더우(Beidou) 등에 그리고/또는 하나 또는 그 초과의 글로벌 및/또는 지역 네비게이션 위성 시스템들과 연관될 수 있거나 아니면 이와의 사용이 가능한 다양한 증강 시스템들(예를 들어, SBAS(Satellite Based Augmentation System))에 적용될 수 있거나 아니면 이와의 사용이 가능할 수 있다. 제한이 아닌 예로써, SBAS는, 무결성 정보, 차동 보정들 등을 제공하는 증강 시스템(들), 예컨대, 예를 들어 WAAS(Wide Area Augmentation System), EGNOS(European Geostationary Navigation Overlay Service), MSAS(Multi-functional Satellite Augmentation System), GAGAN(GPS Aided Geo Augmented Navigation or GPS and Geo Augmented Navigation system) 등을 포함할 수 있다.
[0023] 일 실시예에서, 시스템(100)은 또한, 네트워크(102) 및 네트워크(102)에 커플링된 보조 데이터 서버(240)로의, 디바이스들(예컨대 모바일 디바이스(110))에 대한 무선 네트워크 액세스를 제공하는 물리적 구조물(120)내에 로케이팅된 복수의 실내 트랜시버들(130-1 내지 130-M)(예컨대 WiFi 액세스 포인트들, 블루투스 트랜시버들, 펨토 셀들 등), GNSS 신호들을 송신하는 복수의 GNSS 위성들(120-1 내지 120-N)을 포함한다. 보조 데이터 서버(240)는 또한 컴퓨팅 디바이스, 예컨대 서버 컴퓨터, 데스크톱 컴퓨터 등일 수 있다.
[0024] 보조 데이터 서버(240) 및 모바일 디바이스(110)는 네트워크(102)에 커플링될 수 있으며, 네트워크(102)는 정보 교환을 위한 임의의 표준 프로토콜들을 통한 데이터 전송을 제공한다. 일 실시예에서, 모바일 디바이스(110)는 실내 트랜시버들(130-1 내지 130-M) 중 하나에 의해 제공되는 무선 접속, 셀룰러 전화 접속, 또는 다른 무선 접속을 통해 네트워크(102)와 커플링된다. 모바일 디바이스(110) 및 보조 데이터 서버(240)는 하나의 LAN(Local Area Network) 상에서 실행(run)될 수 있고 동일한 물리적 또는 논리적 시스템, 또는 상이한 물리적 또는 논리적 시스템들에 통합될 수 있다. 대안적으로, 모바일 디바이스(110) 및 보조 데이터 서버(240)는, 인터넷을 통해 서로 커플링되지만 방화벽들, 라우터들 및/또는 다른 네트워크 디바이스들에 의해 분리될 수 있는 상이한 LAN들, 광역 네트워크들, 셀룰러 전화 네트워크들 등 상에 상주할 수 있다. 또 다른 구성에서, 보조 데이터 서버(240)는 공개 네트워크(예를 들어, 인터넷) 또는 사설 네트워크(예를 들어, LAN)를 통해 다른 디바이스들과 커플링되는 동일 서버 또는 상이한 서버들 상에 상주할 수 있다. 예를 들어 호스트형 구성들, 분배형 구성들, 집중형 구성들 등을 포함하는 다양한 다른 네트워크 구성들이 이용될 수 있다는 것을 주목해야 한다.
[0025] 일 실시예에서, 모바일 디바이스(110)는, GNSS 위성들(120-1 내지 120-N) 중 하나 또는 그 초과의 것에 의해 제공되는 GNSS 신호들, 및 실내 트랜시버 AP들(130-1 내지 130-M) 중 하나 또는 그 초과의 것에 의해 제공되는 신호들에 기초하여 실세계 로케이션을 결정한다. 통상적으로, 모바일 디바이스(110)는, 모바일 디바이스가 물리적 구조물(120) 외부에 있을 때 GNSS 위성들(120-1 내지 120-N)에 의해 제공되는 GNSS 신호들을 이용하여 자신의 포지션을 결정할 수 있다. 게다가, 모바일 디바이스(110)는 통상적으로, 모바일 디바이스가 물리적 구조물(120) 내에 있을 때 실내 트랜시버 AP들(130-1 내지 130-M)에 의해 제공되는 신호들을 이용하여 자신의 포지션을 결정할 수도 있다. 일 실시예에서, 아래에서 보다 상세히 논의되는 것처럼, 모바일 디바이스(110)는, 실내 트랜시버들(130-1 내지 130-M) 중 적어도 하나에 의해 송신되는 신호들로부터 결정되는, 물리적 구조물(120) 내의 결정된 로케이션에 기초하여 GNSS 수신기(미도시)가 활성화시킨다. 일 실시예에서, 모바일 디바이스(110)는, GNSS 위성들(120-1 내지 120-N) 중 하나 또는 그 초과의 모바일 디바이스(110)에 가시성을 제공하는, 물리적 구조물의 부분들(122), 예를 들어, 창문들, 채광창들(skylights), 아트리움들(atriums) 또는 GNSS 신호들이 통과하게 허용하는 다른 구조물들을 통해 GNSS 위성들(120-1 내지 120-N)로부터 GNSS 신호들을 수신한다. 모바일 디바이스(110)의 GNSS 수신기의 활성화시, 모바일 디바이스(110)는, 수신된 GNSS 신호들, 또는 GNSS 신호들 및 실내 트랜시버 신호들의 조합에 기초하여 자신의 포지션을 결정한다.
[0026] 일 실시예에서, 모바일 디바이스(110)가 실내 트랜시버들(130-1 내지 130-M) 중 하나 또는 그 초과의 것으로부터 수신된 신호들로부터 실내 포지션을 결정할 때, 모바일 디바이스(110)는 실내 GNSS 신호 가시성에 대한 요청으로서 네트워크(102)를 통해 보조 데이터 서버(240)로 포지션 데이터를 통신한다. 일 실시예에서, 보조 데이터 서버(240)는 물리적 구조물 내부 어디에 모바일 디바이스(110)가 있는지를 결정하기 위해 수신된 로케이션 데이터를 이용한다. 모바일 디바이스가 물리적 구조물(즉, 도 1에 예시된 물리적 구조물(120)) 내에 있다는 결정에 기초하여, 보조 데이터 서버(240)는, 모바일 디바이스(110)에 실내 GNSS 신호 가시성 데이터를 송신함으로써 모바일 디바이스(110)에 응답한다. 일 실시예에서, 실내 GNSS 신호 가시성 데이터는 GNSS 신호들이 모바일 디바이스(110)에 의해 수신가능한 물리적 구조물(120) 내의 로케이션들을 표시하는 데이터를 포함한다. 예를 들어, 창문, 채광창, 아트리움, 수직 창문들의 섹션, 야외 구역 등은, 모바일 디바이스(110)가 GNSS 위성들(120-1 내지 120-N) 중 하나 또는 그 초과의 것으로부터 GNSS 신호들을 수신하는 것을 가능하게 할 수 있다. 일 실시예에서, 실내 GNSS 신호 가시성 데이터는, 로케이션 포인트들, 폴리고날(polygnal) 구역들 등으로서 GNSS 신호들이 이용가능할 수 있는 물리적 구조물(120) 내의 로케이션들을 인코딩한다. 일 실시예에서, 실내 GNSS 신호 가시성 데이터는 모바일 디바이스(110)의 현재 로케이션에 응답하여 즉각(on-the-fly) 보조 데이터 서버(240)에 의해 발생될 수 있다. 일 실시예에서, 실내 GNSS 신호 가시성 데이터는 보조 데이터 서버(240)에 의해 사전에 발생될 수 있다. 실내 GNSS 신호 가시성 데이터의 발생은 도 4와 관련하여 아래에서 더 상세히 논의된다.
[0027] 일 실시예에서, 실내 GNSS 신호 가시성 데이터의 수신에 응답하여, 모바일 디바이스(110)는, GNSS 신호들이 수신될 수 있는 물리적 구조물(120) 내의 로케이션에 모바일 디바이스(110)가 있는지를 실내 GNSS 신호 가시성 데이터로부터 결정한다. 모바일 디바이스(110)가 이러한 구역 내에 있다는 것을 결정할 때, 모바일 디바이스(110)는 GNSS 위성들(120-1 내지 120-N) 중 하나 또는 그 초과의 것으로부터 GNSS 신호들을 수신하기 위해 자신의 GNSS 수신기(미도시)를 활성화시킨다. 일 실시예에서, 모바일 디바이스(110)는 수신된 GNSS 신호를 이용하여 자신의 실세계 또는 물리적 로케이션을 결정한다. 일 실시예에서, GNSS 기반 신호 측정들은 실내 트랜시버 기반 신호 측정들과 조합되어 물리적 구조물(120) 내의 모바일 디바이스(110)의 결정된 로케이션을 정제할 수 있다. 또 다른 실시예에서, 모바일 디바이스(110)는 실내 트랜시버 신호들(예컨대 WiFi AP들로부터 수신된 신호들)로부터 결정된 로케이션을 무시하고 수신된 GNSS 신호 측정들로부터 결정된 로케이션만을 이용할 수 있고, 또는 대안적으로는, GNSS 신호 측정들, 또는 수신된 신호들의 품질, 세기, 또는 다중-경로 특징들에 기초한 2개 세트들의 신호들의 일부 조합은 무시하고, 오직 실내 트랜시버 신호들로부터 로케이션을 결정할 수 있다. 모바일 디바이스(110)가 GNSS 신호 가시성 데이터를 비롯한 실내 로케이션 및 보조 데이터에 기초하여 자신의 GNSS 수신기를 턴온시키고 이용할 시기를 결정하기 때문에, 모바일 디바이스(110)는 전력 및 컴퓨팅 자원들을 보존한다. 즉, 모바일 디바이스(110)는 단순히 어떠한 GNSS 신호들도 이용가능하지 않다는 것을 결정하기 위해 자신의 GNSS 수신기를 주기적으로 턴온시킬 필요가 없다. 대신 모바일 디바이스(110)는, 이용가능한 GNSS 신호들이 있을 가능성이 있을 때, 그리고 일부 실시예들에서, 실내 트랜시버들로부터 결정된 로케이션이 또한 특정 정확도 임계치 미만인 경우에만, 자신의 GNSS 수신기를 활성화시킨다. 게다가, 실내 트랜시버 신호들로부터 결정된 로케이션을 보충하거나, 강화시키거나 또는 교체하기 위해 GNSS 신호들을 사용하는 것은, 실내 트랜시버 신호들 단독으로부터 모바일 디바이스(110)에 의해 결정되는 실내 포지션의 정확도를 증가시킨다.
[0028] 일 실시예에서, 모바일 디바이스(110)가, 실내 GNSS 신호 가시성 데이터에 기초하여, 자신의 GNSS 수신기를 활성화시키도록 결정할 때, 모바일 디바이스(110)는 성공, 실패, 신호 세기, 위성들의 수, 어떤 위성들이 가시적이었는지, 그리고/또는 보조 데이터 서버(240)에 대한 GNSS 신호 품질 관련 팩터들을 나타내는 데이터를 추가로 송신한다. 일 실시예에서, 아래에서 보다 상세히 논의되는 것처럼, 보조 데이터 서버(240)는 모바일 디바이스(110)의 통신 결과들에 기초하여 실내 GNSS 신호 가시성 데이터를 정제한다. 예를 들어, 실내 GNSS 신호 가시성 데이터는 이용가능한 위성들의 부족 또는 GNSS 신호 획득에 대한 무능력을 반영하도록 변경되어, 물리적 구조물(120)의 보조 데이터 내 로케이션에 대한 실내 GNSS 신호 가시성 데이터를 제거, 변형, 이동 또는 축소시킬 수 있다. 반대로, 실내 GNSS 신호 가시성 데이터는 모바일 디바이스(110)의 능력을 반영하도록 변경되어 이전에 결정된 약한 실내 수신 구역내에서 강한 GNSS 신호를 획득할 수 있다. 일부 실시예들에서, 수신된 위성들 및 수신 시간은 GNSS 보조 데이터내에 보고된 것처럼 주어진 물리적 로케이션으로부터 위성 신호들의 가시각(angle of visibility)을 정제하는데 이용될 수 있다. 일 실시예에서, 보조 데이터 서버(240)는 일정 시간 기간에 걸쳐 GNSS 신호 가시성 데이터의 클라우드 소싱 정제들을 수행하기 위해 복수의 모바일 디바이스들(미도시)로부터 이러한 피드백 데이터를 수신한다. GNSS 가시성 데이터의 일정한 정제는, GNSS 가시성 데이터가 정확하고, 최신의 것이며 실세계 사용자 결과들을 반영함을 보장한다. 일부 실시예들에서, 보조 데이터 서버(240)는 또한 GNSS 어시스턴스(assistance), 예컨대 GNSS 궤도력 데이터, 알마낵(almanac) 데이터, 시간 및/또는 위성 군(satellite constellation) 정보를 제공할 수 있다. 다른 실시예들에서, 개별 GNSS-가능 로케이션 서버(미도시)는 GNSS 어시스턴스, 예컨대 GNSS 궤도력 데이터, 알마낵 데이터, 시간 및/또는 위성 군 정보를 제공하는데 이용될 수 있다.
[0029] 도 2는 모바일 디바이스 및 보조 데이터 서버의 일 실시예(200)의 블록도이다. 모바일 디바이스(210) 및 보조 데이터 서버(240)는 도 1에서 앞서 논의된 모바일 디바이스(110) 및 보조 데이터 서버(240)에 대한 추가의 상세사항들을 제공한다.
[0030] 일 실시예에서, 모바일 디바이스(210)는 하나 또는 그 초과의 프로세서들(212), 메모리(205), I/O 제어기(225), GNSS 수신기(216), 네트워크 인터페이스(204), 및 디스플레이(220)를 포함할 수 있는 시스템이다. 모바일 디바이스(210)는 또한, 하드웨어, 소프트웨어, 펌웨어 또는 이들의 조합, 예컨대 검출기(235)와 포지션 추정 엔진(230)으로서 구현될 수 있는 다수의 프로세싱 모듈들을 포함할 수 있다. 모바일 디바이스(210)는 또한, 예시되지는 않았지만, 사용자 인터페이스(예를 들어, 키보드, 터치-스크린, 또는 유사한 디바이스들), 전력 디바이스(예를 들어, 배터리) 뿐만 아니라 통상적으로 전자 디바이스들과 연관된 다른 컴포넌트들을 포함할 수 있다는 것이 인식되어야 한다. 네트워크 인터페이스(204)는 또한, 네트워크로/네트워크로부터 무선 링크를 통해 데이터 스트림들을 송신 및 수신하기 위해 다수의 무선 서브시스템들(215)(예를 들어, 블루투스, WiFi, 셀룰러, 또는 다른 네트워크들)에 커플링될 수 있고, 또는 네트워크들(예를 들어, 인터넷, 이더넷, 또는 다른 무선 시스템들)에 대한 직접 접속을 위한 유선 인터페이스일 수 있다. 일 실시예에서, 네트워크 인터페이스(204) 및 무선 서브시스템 둘다는 모바일 디바이스(210)를 네트워크(202)에 커플링한다.
[0031] 프로세서(212)에 의한 실행을 위한 명령들을 저장하기 위해 메모리(205)가 프로세서(212)에 커플링된다. 일부 실시예들에서, 메모리(205)는 비-일시적 메모리이다. 메모리(205)는 또한 아래 설명된 실시예들을 구현하기 위해 하나 또는 그 초과의 GNSS 신호 가시성 데이터 또는 모듈들(즉, 포지션 추정 엔진(230) 및/또는 검출기(235))을 저장할 수 있다. 이후 설명되는 바와 같이 실시예들은 모바일 디바이스(210)의 프로세서(212) 및/또는 모바일 디바이스(210) 및/또는 다른 디바이스들의 다른 회로에 의해, 예를 들어 메모리(205) 또는 다른 엘리먼트에 저장된 것으로서, 명령들의 실행을 통해 구현될 수 있다는 것을 인식해야 한다. 특히, 이로 제한되는 것은 아니지만 프로세서(212)를 포함하는 모바일 디바이스(210)의 회로는, 일부 실시예들에 따라 방법들 또는 프로세서들을 실행하기 위해, 프로그램의 제어하에, 루틴, 또는 실행 명령들을 동작시킬 수 있다. 예를 들어, 이러한 프로그램은 펌웨어 또는 소프트웨어(예를 들어 메모리(205) 및/또는 다른 로케이션들에 저장됨)로 구현될 수 있고, 프로세서들, 예컨대 프로세서(212) 및/또는 모바일 디바이스(210)의 다른 회로에 의해 구현될 수 있다. 또한, 프로세서, 마이크로프로세서, 회로, 제어기 등의 용어들은 로직, 커맨드들, 명령들, 소프트웨어, 펌웨어, 기능 등을 실행할 수 있는 임의의 타입의 로직 또는 회로를 지칭할 수 있다는 것을 인식해야 한다.
[0032] 또한, 본원에 설명된 기능들, 엔진들 또는 모듈들 중 일부 또는 모두가 모바일 디바이스(210) 자체에 의해 수행될 수 있고 그리고/또는 본원에 설명된 기능들, 엔진들 또는 모듈들 중 일부 모두가 I/O 제어기(225) 또는 네트워크 인터페이스(204)(무선 또는 유선)를 통해 모바일 디바이스(210)에 접속된 다른 시스템에 의해 수행될 수 있다는 것을 인식해야 한다. 따라서, 기능들 중 일부 및/또는 모두가 다른 시스템에 의해 수행될 수 있고 결과들 또는 중간 계산들이 모바일 디바이스(210)로 다시 전송될 수 있다. 일부 실시예들에서, 이러한 다른 디바이스는 서버, 예컨대 실시간 또는 거의 실시간으로 정보를 프로세싱하도록 구성된 보조 데이터 서버(240)를 포함할 수 있다. 일부 실시예들에서, 다른 디바이스는 예를 들어 공지된 구성의 모바일 디바이스(210)에 기초하여, 결과들을 미리 결정하도록 구성된다.
[0033] 일 실시예에서, 보조 데이터 서버(240)는, 또한 하나 또는 그 초과의 프로세서들(242), 맵 저장소(255) 및 네트워크 인터페이스(244)를 포함할 수 있는 시스템이다. 보조 데이터 서버(240)는 또한, 하드웨어, 소프트웨어, 펌웨어, 또는 이들의 조합, 예컨대 디렉토리 보조 엔진(245), 구조 맵 분석(250) 모듈, 및 클라우드 소싱 분석(260) 모듈로서 구현될 수 있는 다수의 프로세싱 모듈들을 포함할 수 있다. 일 실시예에서, 네트워크 인터페이스(244)는 보조 데이터 서버(240)를 네트워크(202)에 커플링한다. 일 실시예에서, 보조 데이터 서버(240)의 프로세싱 모듈들은 예시된 것처럼, 단일 서버상에 로케이팅될 수 있거나 또는 네트워크(202)를 통해 서로 통신가능하게 커플링되는 2개 또는 그 초과의 서버들 사이에 분배될 수 있다. 일부 실시예들에서, 보조 데이터 서버(240)는 또한 실내 트랜시버들의 로케이션들, 실내 트랜시버 신호-관련 정보 예컨대 신호 세기 및/또는 라운드 트립 시간, 및/또는 다른 실내-포지션 관련 정보를 제공한다. 일부 실시예들에서, 정보는 또한 보조 데이터 서버(240)에 의해 제공되는 실내 맵에 대한 주석들로서 제공될 수 있다.
[0034] 일 실시예에서, 모바일 디바이스(210) 및 보조 데이터 서버(240)는 앞서 도 1에 논의된 네트워크 구성 및 다양한 네트워크들을 통해 서로 통신한다. 일 실시예에서, 네트워크를 통한 모바일 디바이스(210) 및 보조 데이터 서버(240)의 상호작용은 모바일 디바이스(210)가 물리적 구조물 내부에 있을 때 GNSS 신호들을 효과적으로 이용하게 한다.
[0035] 일 실시예에서, 모바일 디바이스(210)는, 포지션 추정 엔진(230)이 모바일 디바이스(210)의 실내 포지션을 결정하는 것을 가능하게 하는 하나 또는 그 초과의 실내 트랜시버들(미도시)로부터의 신호들을 수신한다. 일 실시예에서, 모바일 디바이스(210)는 물리적 구조물내에 있기 때문에, GNSS 수신기(216)는 디스에이블된다. 일 실시예에서, 모바일 디바이스는 자신의 결정된 실내 포지션을 네트워크(202)를 통해 보조 데이터 서버(240)에 통신한다. 개별 로케이션 서버(미도시)를 갖는 실시예들에서, 모바일 디바이스의 로케이션은 로케이션 서버에 의해 네트워크(202)를 통해 보조 데이터 서버(240)에 제공될 수 있다.
[0036] 보조 데이터 서버(240)는 모바일 디바이스(210)의 결정된 실내 포지션을 수신한다. 디렉토리 보조 엔진(245)은 메모리(255)에 저장된 맵을 로케이팅하기 위해 실내 포지션을 이용한다. 일 실시예에서, 맵은, 모바일 디바이스(210)가 내부에 로케이팅된 물리적 구조물의 맵이다. 게다가, 맵은, GNSS 신호들이 모바일 디바이스(210)에 이용가능할 수 있는 물리적 구조물 내부의 로케이션들을 표시하는 데이터를 포함한다. 일부 실시예들에서, 맵은 또한, 실내 트랜시버들의 로케이션들 및/또는 실내 트랜시버 신호들에 대해 예상되는 신호 세기 및/또는 RTT 측정들을 포함한다. 일부 실시예들에서, 맵은, 물리적 구조물들을 통해 전달되는 신호들이 가시적인 모바일 디바이스 로케이션들 이외에, 도 1에 예시된 물리적 구조물(120)의 부분들(122)과 같은 층(floor)의 크기 및 층으로부터의 높이 및/또는 물리적 구조물들에 의해 지정되는 애퍼처(aperture)들의 로케이션 및 고도의 추정들을 포함한다.
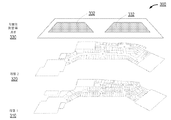
[0037] 일 실시예에서, 메모리에 저장된 맵은 구조물 맵 분석(250) 모듈에 의해 사전에 계산된다. 일 실시예에서, 물리적 구조물을 모델링하는 초기 맵은 보조 데이터 서버(240)에 의해 수신된다. 일 실시예에서, 초기 맵은 레이아웃, 고도 및 맵상의 포지션들의 경도, 맵상의 아이템들의 물리적 차원들, 구조물내에서 상점들의 포지션, 창문 로케이션들, 채광창 로케이션들, 야외 구역들 등과 같은, 물리적 구조물의 내부, 외부 및 구성에 관한 상세한 데이터를 포함하는 상업적으로 이용가능한 맵이다. 일 실시예에서, 맵은 물리적 구조물의 상세한 다차원 모델 및/또는 물리적 설명(일부 실시예들에서, 물리적 구조물(120)의 부분들(122)과 같은 신호 애퍼처들의 높이, 크기 및 로케이션을 포함)을 제공한다. 물리적 구조물의 내부의 상세 맵(300)의 예가 도 3a에 예시된다. 맵(300)은 쇼핑 몰의 제 1 레벨(310), 제 2 레벨(320) 및 지붕(330)을 예시한다. 예시된 실시예에서, 지붕(330)은, 맵(300)에 예시된 물리적 구조물의 내부 내에 로케이팅된 모바일 디바이스에 대한 GNSS 위성의 장면(view) 또는 GNSS 위성의 시선을 제공할 수 있는 2개의 창문들(332)을 포함한다.
[0038] 일 실시예에서, 보조 데이터 서버(240)의 구조물 맵 분석(250) 모듈은 GNSS 신호들이 모바일 디바이스에 대해 이용가능할 수 있는 맵(300)에 의해 모델링되는 물리적 구조물내의 로케이션들을 결정하기 위해 맵(300)을 이용한다. 일부 실시예들에서, 보조 데이터 서버(240) 및/또는 모바일 디바이스(210)는, 창문들(332)과 같은 애퍼처들을 통해 어떤 위성들이 주어진 로케이션에 대해 가시적일지를 예측하기 위해, GNSS 궤도력에 의해 제공되는 GNSS 성좌의 멤버들의 로케이션 및 시각(time of day)을 고려할 수 있다. 도 3b에 예시되고 아래에 논의되는 것처럼, 구역(340) 및 구역(350)은, 그 구역들내에 로케이팅된 디바이스가 GNSS 신호들 from 하나 또는 그 초과의 GNSS 위성들(120-1 내지 120-N)로부터 GNSS 신호들을 수신하는 것을 가능하게 할 수 있는 반면, 구역(360)은 그 구역내에 로케이팅된 디바이스가 GNSS 신호들을 수신하는 것을 가능하게 하지 않는다. 일 실시예에서, 구조물 맵 분석(250) 모듈은, 하늘에 대해 가시성이 있는 맵의 부분들을 결정하기 위해 맵 상의 로케이션들에 대한 광선 추적(광선 추적)을 수행한다. 즉, 광선 추적은, 디바이스가 GNSS 신호들을 수신하는 것을 가능하게 하도록 모바일 디바이스가 하늘에 대해 가시성이 있는 곳을 결정한다.
[0039] 일 실시예에서, 광선 추적은 맵 그리드의 각각의 포인트, 예를 들어 구역(350)내 포인트들에 대해 수행된다. 그리드의 각각의 포인트에 대해, 복수의 광선들은 랜덤한 방향들로 포인트로부터 프로젝팅되며 광선이 구조물을 투과할 수 있는지를 결정하도록 추적된다. 즉, 구조물 맵 분석(250) 모듈은 각각의 광선이 창문, 채광창, 아트리움 등을 통과(즉 하늘 투과)할지, 또는 광선이 벽, 지붕 등에 의해 차단될지를 결정한다. 일 실시예에서, 광선 추적은 컴퓨터 그래픽 프로세스이며 이는 구역(350)에 관한 상세한 물리적 모델 및 레이아웃과 같이, 맵에 의해 제공되는 물리적 구조물의 레이아웃 및 상세한 물리적 모델에 기초하여 수행된다. 예를 들어, 구역(340)에서, 그리드 포인트에서 구조물 맵 분석(250) 모듈에 의해 수행되는 광선 추적은 모든 광선들(342)이 하늘 투과함을 표시할 수 있는 반면, 구역(360)에서의 그리드 포인트에서 구조물 맵 분석(250) 모듈에 의한 광선 추적은 모든 광선들(362)이 하늘 투과하지 않음을 표시할 수 있다. 게다가, 구역(350)에서의 포인트와 같은 로케이션들이 있을 수 있고, 여기서 광선 추적은 단지 하늘 투과를 달성하는 부분적 개수의 광선들(352)만을 드러내지만, 광선 추적에서의 일부 광선들(354)은 하늘 투과를 달성하지 않는다. 일 실시예에서, 구조물 맵 분석(250) 모듈은, 맵상의 그리드 포인트들처럼, 하늘 투과(즉, GNSS 신호들이 가시적일 수 있고 모바일 디바이스(210)에 의해 수신될 수 있음)가 있는 로케이션들을 표시하는 데이터를 저장한다. 일 실시예에서, 모바일 디바이스(210)는 어떤 위성들이 기존 애퍼처들을 통해 가시적일지 그리고 어떤 위성들을 탐색해야 할지를 결정하기 위해, 광선 추적 데이터 및/또는 광선 추적 데이터로부터 유추되는 컨피던스 레벨들이 시간 및 위성 궤도력 데이터에 의해 예측되는 것처럼, 특정한 위성 포지션들에 대응하는지를 분석한다.
[0040] 다른 실시예에서, 구조물 맵 분석(250) 모듈은 폴리곤으로서 그리드 포인트들의 클러스터들을 저장할 수 있으며, 여기서 폴리곤 내의 임의의 포인트는 하늘로 투과성을 갖는다. 일 실시예에서, 하늘 투과 분석의 결과들에 기초하여, 그리드 포인트 또는 폴리곤에 대한 컨피던스 레벨이 또한 저장될 수 있다. 예를 들어, 구역(340)과 관련된 그리드 포인트 또는 폴리곤(여기서, 모든 추적 광선은 하늘로 투과를 달성함)은 높은 컨피던스 레벨과 연관될 수 있으며, 구역(350)과 관련된 그리드 포인트 또는 폴리곤(여기서, 추적 광선들의 일부가 하늘로 투과를 달성함)은 적절한 컨피던스 레벨과 연관될 수 있다. 일 실시예에서, 컨피던스 레벨은 하늘 투과를 달성하는 추적 광선들의 수에 대해 기초할 수 있다. 그리드 포인트들 및/또는 폴리곤들은, 물리적 구조물내에서, GNSS 신호들이 이용가능할 수 있음을 표시하는 모바일 디바이스 데이터를 제공하는 실내 GNSS 신호 가시성 데이터이다.
[0041] 일 실시예에서, 보조 데이터 서버(240)는 GNSS 신호 가시성 데이터 (예를 들어, 모바일 디바이스의 현재 로케이션에 대한 그리드 포인트들 또는 폴리곤들)를 모바일 디바이스(210)에 송신한다. 일 실시예에서, GNSS 신호 가시성 데이터는 구조물 맵 분석(250) 모듈의 분석 결과들로부터 발생된 맵에 제공될 수 있다. 다른 실시예에서, GNSS 신호 가시성 데이터는, 타일(tile), 예컨대 직사각형, 헥사고날 등과 같이 형상화된 타일에 제공될 수 있으며, 이는 추정되는 사용자의 로케이션에 기초하는 맵의 구역에 GNSS 신호 가시성 데이터를 제공한다. 이 실시예에서, 타일은 구조물 맵 분석(250) 모듈에 의해 분석되는 맵의 서브세트를 표현하며, GNSS 신호 가시성 데이터 (예를 들어, 타일)의 서브 세트의 송신은 모바일 디바이스(210)에서의 응답 시간 및 전력 소비를 감소시킨다. 일 실시예에서, 검출기(235)는, 포지션 추정 엔진(230)에 의해 결정되는 실내 포지션이 폴리곤 내에 있는지 또는 하늘 투과 그리드포인트에 의해 커버되는지를 결정하기 위해, 수신된 실내 GNSS 신호 가시성 데이터를 분석한다. 실내 GNSS 신호 가시성 데이터가 폴리곤들을 포함하는 경우, 검출기(235)는, 모바일 디바이스(210)의 추정된 실내 로케이션이 폴리곤 내에 있는지를 결정하기 위해, 광선 테스팅, 신호 누적 등을 이용하는 것과 같이, 폴리곤 테스트시 지리적 포인트를 이용할 수 있다. 실내 GNSS 신호 가시성 데이터가 그리드 포인트들의 세트인 경우, 검출기(235)는 모바일 디바이스(210)의 추정된 실내 포지션이 그리드포인트로부터 미리결정된 거리 내에(즉, 1미터내에, 2미터내에 등) 있는지를 결정할 수 있다.
[0042] 모바일 디바이스(210)가 GNSS 신호들이 이용가능한 물리적 구조물의 내부의 로케이션 내에 있음을 검출기(235)가 결정할 때, 검출기는 GNSS 수신기(216)를 활성화시킨다. GNSS 수신기(216)는 턴온되고 하나 또는 그 초과의 GNSS 위성들(미도시)로부터 GNSS 신호들을 수신하도록 시도한다. 일부 실시예들에서, GNSS 수신기(216)는 또한 GNSS 궤도력 데이터, 시간 및 현재 로케이션을 이용하여 예를 들어, 임의의 주어진 위성이 특정 애퍼처를 통해 가시적일 가능성에 기초하여, 어떤 위성들을 탐색할지를 결정할 수 있다. 수신된 GNSS 신호들이 GNSS 수신기(216)에 의해 포지션 추정 엔진(230)으로 포워딩되며, 이는 모바일 디바이스(210)의 GNSS-기반 또는 하이브리드 GNSS 및 실내 지상파(terrestrial) 신호-기반 로케이션을 결정한다. 일 실시예에서, 포지션 추정 엔진은 모바일 디바이스의 로케이션(210)로서 GNSS 기반 포지션을 이용한다. 다른 실시예에서, 포지션 추정 엔진(230)은 실내 트랜시버들로부터 결정되는 추정된 실내 포지션과 GNSS 기반 포지션을 결합한다. 일 실시예에서, 포지션 추정 엔진(230)은 로케이션을 결정하기 위해 GNSS 위성들 및 실내 트랜시버들 둘다로부터의 신호들을 이용한다. 일 실시예에서, GNSS 위성 신호들은, 신호 DOP(Dilution of Precision)를 개선하기 위해, 실내 트랜시버들이, 예컨대 건물의 외부 쪽에서는 이용가능하지 않지만, GNSS 신호들이 동일 방향의 애퍼처를 통해 가시적인 방향들에 대해 보상하는데 이용될 수 있다. 조합된 포지셔닝 신호들로부터 추정되는 포지션 및/또는 GNSS 기반 포지션은, 모바일 디바이스(210)가 오로지 실내 트랜시버 신호들에만 의존하는 포지션보다 모바일 디바이스(210)에 대해 보다 정확한 실내 포지션 결정을 가능하게 한다. 게다가, 모바일 디바이스(210)의 GNSS 수신기(216)는, GNSS 신호들이 이용가능했던 물리적 구조물의 구역내에 모바일 디바이스(210)가 로케이팅되었다고 결정될 때까지 달성되지 않았기 때문에, 전력 및 컴퓨팅 자원들이 보존된다.
[0043] 일 실시예에서, 검출기(235)는 추가로, GNSS 수신기(216)에 의한 GNSS 신호 포착이 성공적이었는지를 결정한다. 일 실시예에서, 검출기(235)는 예컨대, GNSS 신호 포착의 성공 및/또는 실패, 수신된 신호들에 대한 신호 세기, 위성들의 수, 검출된 위성들에 대한 위성 ID들, 및/또는 위성들이 검출된 시간 등을 표시하는 데이터를 보조 데이터 서버(240)에 송신한다. 게다가, 검출기(235)는 GNSS 신호 포착의 성공 및/또는 실패에 관련하여 폴리곤 또는 그리드 포인트(들)을 표시하는 데이터를 송신한다. 보조 데이터 서버(240)의 클라우드 소싱 분석(260)은 모바일 디바이스, 예컨대 모바일 디바이스(210)로부터 수신된 결과들을 축적하고 분석한다. 일 실시예에서, 클라우드 소싱 분석(260)은 그리드 포인트 분류(즉, GNSS 신호들이 이용가능한지/이용가능하지 않은지, 신호 세기, 컨피던스 레이팅 등)를 정제하고, 임의의 폴리곤들의 형상, 크기 및 컨피던스 레이팅을 정제한다. 클라우드 소싱 분석(260)은, GNSS 신호 포착이 복수의 모바일 디바이스들로부터 수신될 때, 실시간으로 또는 거의 실시간으로 실내 GNSS 신호 가시성 데이터의 정제를 수행할 수 있다. 정제된 실내 GNSS 신호 가시성 데이터는, 실내 GNSS 신호 가시성 데이터가 실세계 조건들에 응답하고 모바일 디바이스들의 실제 결과들을 반영함을 보장한다.
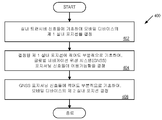
[0044] 도 4는 모바일 디바이스에 의한 실내 포지션 결정에 대한 방법(400)의 일 실시예의 흐름도이다. 방법(400)은 하드웨어(회로, 전용 로직 등), 소프트웨어(예컨대, 범용성 컴퓨터 시스템 또는 전용 머신상에서 실행), 펌웨어, 또는 조합을 포함할 수 있는 프로세싱 로직에 의해 수행된다. 일 실시예에서, 방법(400)은 모바일 디바이스(예를 들어, 모바일 디바이스(110 또는 210))에 의해 수행된다.
[0045] 도 4를 참조로, 프로세싱 로직은 실내 트랜시버 신호들에 기초하여 모바일 디바이스의 제 1 실내 포지션을 결정하는 단계 (프로세싱 블록(402))로 시작한다. 일 실시예에서, 실내 트랜시버 신호들은 WiFi AP들, 펨토셀들, 블루투스 트랜시버들, 또는 실내 트랜시버들의 조합에 의해 발생되는 신호들이다.
[0046] 프로세싱 로직은, 결정된 제 1 실내 포지션에 적어도 부분적으로 기초하여, GNSS(global navigation satellite system) 포지셔닝 신호들이 이용가능함을 결정단다(프로세싱 블록(404)). 아래에 상세히 논의되는 것처럼, 일 실시예에서, 프로세싱 로직은 제 1 실내 포지션에 기초하여 GNSS 신호 가시성 데이터를 요청하고 GNSS 신호 가시성을 표시하는 데이터를 수신할 수 있다. 일 실시예에서, 프로세싱 로직은 GNSS 신호 가시성을 표시하는 수신된 데이터를 분석하여, 결정된 제 1 실내 포지션에 적어도 부분적으로 기초하여 GNSS 신호들이 이용가능해질 가능성이 있는지를 결정하는데 이용된다. 일 실시예에서, 프로세싱 로직은 이용가능한 GNSS 신호들을 표시하는 수신된 데이터를 분석하여, 결정된 제 1 실내 포지션 및 일부 실시예들에서는 시간 및 위상 궤도력 정보에 적어도 부분적으로 기초하여 GNSS 신호들이 이용가능해질 가능성이 있는 방향을 결정하는데 이용된다.
[0047] 프로세싱 로직은 이후, GNSS 포지셔닝 신호들에 적어도 부분적으로 기초하여 모바일 디바이스의 제 2 실내 포지션을 결정한다(프로세싱 블록(406)).
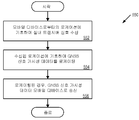
[0048] 도 5a는 GNSS 신호 가시성을 결정하기 위해 물리적 구조물의 맵을 분석하기 위한 방법(500)의 일 실시예의 흐름도이다. 방법(500)은 하드웨어(회로, 전용 로직 등), 소프트웨어(예컨대 범용성 컴퓨터 시스템 또는 전용 머신에서 실행됨), 펌웨어 또는 조합을 포함할 수 있는 프로세싱 로직에 의해 수행된다. 일 실시예에서, 방법(500)은 보조 데이터 서버(예를 들어, 보조 데이터 서버(240 또는 240))에 의해 수행된다.
[0049] 도 5a를 참조로, 프로세싱 로직은 물리적 구조물의 맵을 수신함으로써 시작된다(프로세싱 블록(502)). 일 실시예에서, 프로세싱 로직은 맵핑 데이터 및 맵들의 상업적 제공자로부터의 맵을 이용할 수 있거나, 또는 다른 실시예에서, 맵은 내부에 모바일 디바이스(110)가 있는 건물과 연관된 장소 소유자 또는 관리자에 의해 제공될 수 있다. 앞서 논의된 것처럼, 맵은, 실내 트랜시버들의 로케이션들, 실내 트랜시버 신호 정보 예컨대 신호 세기 및/또는 RTT 데이터 및/또는 애퍼처의 로케이션 등뿐만 아니라, 물리적 구조물의 레이아웃, 구성, 관심 포인트들, 맵 엘리먼트들 간의 관계(즉, 천정, 채광창, 및 야외 구역들에 관한 층 포지셔닝)에 관한 데이터를 포함할 수 있다. 일부 실시예들에서, 정보 예컨대 실내 트랜시버들의 로케이션들에 관한 데이터, 실내 트랜시버 신호 정보 예컨대 신호 세기 및/또는 RTT 데이터, 및/또는 애퍼처들의 로케이션은 장소 소유자 및/또는 관리자에 의해 제공되는 정보 및/또는 클라우드 소싱 신호 데이터에 기초하여 보조 데이터 서버(240 또는 240)에 의해 결정된다.
[0050] 프로세싱 로직은 GNSS 신호 가시성을 결정하기 위해 맵을 분석한다(프로세싱 블록(504)). 일 실시예에서, 프로세싱 로직은, 맵상의 포인트들, 예컨대 맵의 층 부분들에 걸쳐 분포된 그리드 포인트들, 맵상의 물리적으로 액세스가능한 로케이션들에 걸쳐 분포된 그리드 포인트들에 대한 하늘 투과 분석이 수행(즉, 보행자 통로들에 로케이팅된 그리드 포인트들이 분석되나, 벽들, 분수들 등 내부의 그리드 포인트들은 분석되지 않음)될 뿐만 아니라, 맵상의 다른 포인트들에 대한 하늘 투과 분석이 수행된다. 일 실시예에서, 프로세싱 로직에 의해 수행되는 하늘 투과 분석은 앞서 설명된 것처럼 광선 추적을 포함한다. 일 실시예에서, 광선 추적은 맵 상의 포인트들에 대해 수행된다. 각각의 포인트에 대해, 복수의 광선들은 랜덤한 방향들의 포인트로부터 프로젝팅되며, 광선이 구조물을 투과할지 결정하도록 추적되어, 이로써 GNSS 신호들의 잠재적 가시성/이용가능성을, 그리고 일부 실시예들에서는, 이 신호들의 예상되는 신호 세기를, 또는 다른 실시예들에서는, 이 신호들이 위성들로부터 주어진 로케이션의 시선내에 있을 가능성이 있는지 그리고/또는 이 신호들의 예상되는 품질 및/또는 세기가 표시된다. 일 실시예에서, 또한 각각의 포인트에 대한 하늘 투과 정도(즉, 모든 광선들이 하늘 투과를 달성, 어떠한 광선들도 하늘 투과를 달성하지 않음, 또는 광선들의 일부가 하늘 투과를 달성함)가 결정된다.
[0051] 프로세싱 로직은 이후, 맵 분석 결과들을 저장한다(프로세싱 블록(506)). 일 실시예에서, 프로세싱 로직은, 분석이 맵상에 하늘 투과를 표시한 로케이션들을 표시하는 데이터를 저장한다(즉, GNSS 신호들이 모바일 디바이스에 의해 수신가능할 수 있다). 일 실시예에서, 데이터는 맵상에 그리드 포인트들로 저장된다. 일 실시예에서, 포인트들의 클러스터들은 폴리곤들로서 저장될 수 있으며, 여기서 폴리곤내의 임의의 포인트는 적어도 부분적 하늘 투과를 갖는 것으로 결정된다. 일 실시예에서, 품질 정보, 예컨대 GNSS 신호 가시성의 가능성, 가능한(likely) 신호 세기 등이 그리드 포인트들 및/또는 폴리곤들과 함께 저장된다.
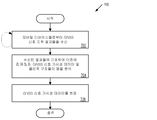
[0052] 도 5b는 GNSS 신호 가시성 데이터를 모바일 디바이스로 송신하기 위한 방법(550)의 일 실시예에 대한 흐름도이다. 방법(550)은 하드웨어(회로, 전용 로직 등), 소프트웨어(예컨대 범용성 컴퓨터 시스템 또는 전용 머신에서 실행됨), 펌웨어 또는 조합을 포함하는 프로세싱 로직에 의해 수행된다. 일 실시예에서, 방법(550)은 보조 데이터 서버(예를 들어, 보조 데이터 서버(240 또는 240))에 의해 수행된다.
[0053] 도 5b를 참조로, 프로세싱 로직은, 모바일 디바이스로부터 실내 트랜시버 신호-기반 로케이션, 예를 들어, WiFi-기반 로케이션을 수신함으로써 시작된다(프로세싱 블록(552)). 일부 실시예들에서, 실내 트랜시버들은 액세스 포인트들, 펨토 셀들, 블루투스 트랜시버들 및 다른 실내 트랜시버들을 포함할 수 있다. 일 실시예에서, 실내 트랜시버 신호-기반 로케이션은 액세스 포인트 신호들, 펨토 셀 신호들, 및/또는 블루투스 트랜시버 신호들로부터 모바일 디바이스에 의해 추정되는 로케이션이다. 프로세싱 로직은 수신된 로케이션에 기초한 GNSS 신호 가시성 데이터를 로케이팅한다(프로세싱 블록(554)). 일 실시예에서, 실내 트랜시버 신호-기반 로케이션은 GNSS 신호 가시성 데이터의 하나 또는 그 초과의 사전에 컴퓨팅된 맵들과 연관될 수 있다. 다른 실시예에서, 모바일 디바이스로부터 실내 트랜시버 신호-기반 로케이션을 수신하는 것에 응답하여, 프로세싱 로직은, GNSS 신호 가시성 데이터가 로케이팅될 수 없을 경우, 즉시 GNSS 신호 가시성 데이터를 컴퓨팅한다. 또 다른 실시예에서, 프로세싱 로직은 저장된 GNSS 신호 가시성 데이터를 로케이팅하도록 시도하지 않으며, 대신 수신된 실내 트랜시버 신호-기반 모바일 디바이스 로케이션에 기초하여 GNSS 신호 가시성 데이터를 자동으로 컴퓨팅한다.
[0054] 프로세싱 로직은, 임의의 것이 로케이팅될 경우, GNSS 신호 가시성 데이터를 모바일 디바이스로 송신한다(프로세싱 블록(556)). 앞서 논의된 것처럼, GNSS 신호 가시성 데이터는 GNSS 신호들이 이용가능한(또는 이용가능할 가능성이 있는) 폴리곤들 또는 포인트들을 포함할 수 있다. 게다가, GNSS 신호 가시성 데이터는, 결정된 GNSS 신호 가시성에 관한 추가의 품질 데이터를 포함한다. 예를 들어, 하늘 투과 분석에 기초하여, GNSS 신호 가시성과 연관된 포인트들 또는 폴리곤들은 가능성 스코어(likelihood score), 신호 세기 예측 등을 표시할 수 있다. 이GNSS 신호 가시성 데이터 및 품질 데이터는, 모바일 디바이스가 물리적 구조물내에 있는 동안 자신의 GNSS 수신기를 활성화시킬지 여부를 결정하는 것을 가능하게 한다. GNSS 신호 가시성 데이터 이외에, 시간, 모바일 디바이스(110)의 추정되는 로케이션, 및 GNSS 궤도력 데이터가 임의의 주어진 시간에, 추정된 로케이션 및/또는 애퍼처로부터 가시적인 GNSS 위성들의 식별을 예측하는데 이용될 수 있다.
[0055] 도 6은 모바일 디바이스가 물리적 구조물 내부에서 GNSS 신호들을 이용하는 것을 가능하게 하기 위한 방법(600)의 일 실시예에 대한 흐름도이다. 방법(600)은 하드웨어(회로, 전용 로직 등), 소프트웨어(예컨대 범용성 컴퓨터 시스템 또는 전용 머신에서 실행됨), 펌웨어 또는 조합을 포함할 수 있는 프로세싱 로직에 의해 수행된다. 일 실시예에서, 방법(600)은 모바일 디바이스(예를 들어, 모바일 디바이스(110 또는 210))에 의해 수행된다.
[0056] 도 6을 참조로, 프로세싱 로직은 실내 트랜시버 신호들을 수신함으로써 시작된다(프로세싱 블록(602)). 일 실시예에서, 실내 트랜시버들(예컨대 WiFi AP들)은, 물리적 구조물 내의 디바이스들에 대한 네트워크 액세스를 제공하는 액세스 포인트들이다. 게다가, 일부 실시예들에서, 실내 트랜시버 신호들은 일부 실시예들에서, 신호들에 포함된(embedded) 로케이션 데이터를 포함하는, 모바일 디바이스에 의한 네트워크의 교환 데이터에 해당할 수 있다.
[0057] 프로세싱 로직은 실내 트랜시버 신호들, 예컨대 WiFi AP 포지셔닝 신호들에 기초하여 모바일 디바이스의 제 1 포지션을 추정한다(프로세싱 블록(604)). 예를 들어, 프로세싱 로직은 모바일 디바이스의 포지션을 삼변측량하기 위해 관련 실내 트랜시버 신호 세기들, 및/또는 RTT(round trip time), AP들을 알려진 포지션들 등을 이용할 수 있다. 대안적으로, 프로세싱 로직은 모바일 디바이스에 가시적인 복수의 AP들 중에서의 지리학적 센트로이드로서 모바일 디바이스의 포지션을 결정할 수 있다. 일부 실시예들에서, 모바일 디바이스의 포지션은 GNSS 위성들 및/또는 실내 지상파 신호들로부터 이용가능한 신호들의 최소제곱법(least squares fit)을 통해 결정될 수 있다.
[0058] 프로세싱 로직은 이후, 보조 데이터 서버로부터, 추정된 제 1 포지션에 기초하여, GNSS 신호 가시성 데이터를 획득한다(프로세싱 블록(606)). 앞서 논의된 것처럼, 프로세싱 로직은 추정된 제 1 포지션을 보조 데이터 서버로 송신하며, GNSS 신호들이 이용가능해질 가능성이 있는 로케이션들에 대응하는 맵, 그리드 포인트들 및/또는 폴리곤을 포함한다는 응답을 수신한다. 프로세싱 로직은 GNSS 신호 가시성이 검출되는지 그리고 GNSS 신호들이 이용가능해질 가능성이 있는지를 결정(프로세싱 블록(610))하기 위해 추정된 제 1 포지션 포지션에 기초하여 GNSS 신호 가시성 데이터를 분석한다(프로세싱 블록(608)). 일 실시예에서, 프로세싱 로직은, 제 1 로케이션이 (예를 들어, 폴리곤 테스트에 포인트를 사용하여) GNSS 신호 가시성의 폴리곤 내에 있는지를 검출하기 위해 GNSS 신호 가시성 데이터를 분석한다. 일 실시예에서, 프로세싱 로직은, 제 1 로케이션이 GNSS 신호 가시성을 표시하는 포인트 상에 있는지, 또는 GNSS 신호 가시성로부터의 미리결정된 거리 내에 있는지를 결정한다. 일부 실시예들에서, GNSS 가시성은 모바일 디바이스의 현재 로케이션 및 모바일 디바이스의 속도 및 헤딩(heading)에 기초하여 추정될 수 있어, GNSS 위성들에 대한 탐색이, GNSS 신호들이 가시적일 수 있는 로케이션에 실제 도달하기 전에 시작되는 것을 가능하게 한다.
[0059] 프로세싱 로직은, GNSS 신호 가시성 데이터가 이용가능하지 않을 때, 업데이트된 실내 트랜시버 신호 정보를 수신하는 프로세싱 블록(602)으로 리턴한다. 그러나 프로세싱 로직은, GNSS 신호들이 이용가능하다고 결정될 때 모바일 디바이스의 GNSS 수신기를 활성화시킨다(프로세싱 블록(612)). GNSS 수신기의 활성화 이후, 프로세싱 로직은 하나 또는 그 초과의 GNSS 위성들로부터 GNSS 신호들을 획득하도록 시도한다(프로세싱 블록(614)). 신호 데이터가 수신될 때, 프로세싱 로직은 수신된 GNSS 신호들에 적어도 부분적으로 기초하여 모바일 디바이스의 제 2 포지션을 추정한다(프로세싱 블록(616)). 일 실시예에서, 제 2 GNSS-기반 포지션 추정은 개선된 모바일 디바이스 포지션을 획득하기 위해 실내 트랜시버-기반 포지션 추정과 조합될 수 있다. 일 실시예에서, GNSS-기반 신호 정보 및 실내 트랜시버-기반 신호 정보는 개선된 모바일 디바이스 포지션을 계산하기 위해 조합될 수 있다. 또 다른 실시예에서, GNSS 신호 가시성 데이터와 함께 송신되는 GNSS 신호 품질 데이터, 및 모바일 디바이스 로케이션은, 앞서 논의된 것처럼, 프로세싱 로직이 가시적 GNSS 신호를 이용하는 방법 및 시기를 결정할 수 있다. 예를 들어, 프로세싱 로직은 신호 세기, 위성들의 수 등에 기초하여 GNSS-기반 포지션 추정 또는 실내 트랜시버-기반 포지션 추정에 가중치를 적용할 수 있다. 실시예에서, 프로세싱 로직은 신호 세기, 위성들의 수 등에 기초하여 GNSS 신호들 또는 실내 트랜시버-기반 포지션 추정에 가중치를 적용할 수 있다. 다른 예로서, GNSS 신호들이 이용가능하지만, 임의의 주어진 신호에 대해 표시된 신호 세기가 최소 임계치 신호 세기 미만인 경우, 프로세싱 로직은 GNSS 신호 또는 신호들이 최소 임계치 신호 세기 미만임을 무시한다.
[0060] 프로세싱 블록(614)에서 GNSS 신호 데이터가 수신되었는지 여부와 관계없이, 프로세싱 로직은 GNSS 신호 포착 결과들을 보조 데이터 서버에 송신한다(프로세싱 블록(618)). 일 실시예에서, 추가의 데이터, 예컨대 수신된 GNSS 신호들의 세기, 수신된 위성 신호들의 수 등이 또한 보조 데이터 서버에 송신된다. 아래 도 7에서 논의되는 것처럼, GNSS 신호 포착 결과들은 보조 데이터 서버가 클라우드 소싱을 통해 GNSS 신호 가시성 데이터를 정제하는 것을 가능하게 한다.
[0061] 게다가, 일 실시예에서, 프로세싱 블록(604)에서 제 1 포지션의 추정은 제 1 포지션과 연관된 불확실성의 결정을 포함할 수 있다. 결정된 불확실성이 낮을 때, 그리고 프로세싱 로직이, 예시되지 않은 대안적 실시예에서, 실내 트랜시버 신호들로부터 정확한 실내 포지션을 결정할 때, 프로세싱 로직은 나머지 블록(606-618)을 스킵할 수 있다. 즉, 프로세싱 로직은 실내 트랜시버 신호-기반 포지션 결정과 연관된 정확도가 충분함을 결정할 수 있다. 이 대안적 실시예에서, 프로세싱 로직은 GNSS 수신기의 활성화 및 GNSS 신호 분석과 연관된 전력을 절약할 수 있다. 다른 실시예에서, GNSS 신호들의 도달 각도 가능성은, 예를 들어, 조합된 신호들의 DOP(dilution of precision)를 개선시킴으로써, GNSS 신호들의 포함이 전체 포지션 정확도를 개선시킬 가능성이 있는지를 결정하기 위해 분석될 수 있다.
[0062] 도 7은 GNSS 신호 가시성 데이터를 정제하기 위한 방법(700)의 일 실시예에 대한 흐름도이다. 방법(700)은 하드웨어(회로, 전용 로직 등), 소프트웨어(예컨대 범용성 컴퓨터 시스템 또는 전용 머신에서 실행됨), 펌웨어 또는 조합을 포함할 수 있는 프로세싱 로직에 의해 수행된다. 일 실시예에서, 방법(700)은 보조 데이터 서버(예를 들어, 보조 데이터 서버(240 또는 240))에 의해 수행된다.
[0063] 도 7을 참조로, 프로세싱 로직은 모바일 디바이스들로부터의 GNSS 신호 포착 결과들을 수신함으로써 시작된다(프로세싱 블록(702)). 일 실시예에서, GNSS 신호 포착 결과들은 하나 또는 그 초과의 모바일 디바이스들로부터 실시간으로 또는 거의 실시간으로 수신된다. 일 실시예에서, 앞서 논의된 것처럼, GNSS 신호 포착 결과들은 추가의 GNSS 신호 품질 데이터를 포함할 수 있다.
[0064] 프로세싱 로직은, 물리적 구조물의 맵, 이전에 컴퓨팅된 GNSS 신호 가시성 데이터 및 모바일 디바이스들로부터 수신된 실세계 신호 포착 결과들을 분석하며(프로세싱 블록(704)), GNSS 신호 가시성 데이터를 변경한다(프로세싱 블록(706)). 일 실시예에서, 프로세싱 로직은 모바일 디바이스들로부터 GNSS 신호 포착 및 품질 데이터를 끊임없이 수신한다. 이 포착 및 품질 데이터는 이후 GNSS 신호 가시성 데이터의 정확도를 결정하기 위해 GNSS 신호 가시성 데이터와 상관될 수 있다. 수신된 실세계 결과들에 기초하여, 프로세싱 로직은 물리적 구조물내의 모바일 디바이스들에 의해 경험되는 실세계 조건들을 반영하도록 GNSS 신호 가시성 데이터를 변경할 수 있다. 예를 들어, 주어진 포지션(또는 폴리곤)에 대한 신호 세기 품질 레이팅들은 인근 포지션들로부터 또는 포지션(또는 폴리곤)에 대한 모바일 디바이스 보고들에 기초하여 업 또는 다운 조절될 수 있다. 게다가, 가시적인 GNSS 신호들에 대응하는 폴리곤들은 커지거나, 축소되거나 아니면 보고된 GNSS 신호 포착 및 품질 결과들, 예컨대 폴리곤 내의 것 및 인근 포지션들로부터의 것들 둘다로부터의 것들을 반영하도록 적응될 수 있다. 일 실시예에서, 상이한 모바일 디바이스들로부터의 실시간 및 실세계 결과들의 소싱(sourcing)은, 보고된 GNSS 신호 가시성 데이터의 정확도뿐만 아니라, 일부 실시예에서는, 상이한 GNSS 수신기들에 대한 자신의 적용가능성을 보장한다.
[0065] 대안적 실시예에서, 도 7에서 앞서 논의된 클라우드 소싱을 수행하는 프로세싱 로직은 또한 모바일 디바이스, 예컨대 모바일 디바이스(110 또는 210)에서 수행될 수 있다. 이 실시예에서, 모바일 디바이스에서의 프로세싱 로직은 실세계 GNSS 신호 포착 결과들을 분석하고, GNSS 신호 가시성 데이터를 변경하고, 그리고 보조 데이터 서버로 결과들을 송신하는 프로세싱 블록(704 및 706)을 수행할 수 있다.
[0066] 본원에 논의된 디바이스들이 모바일 또는 무선 디바이스인 경우, 임의의 적절한 무선 통신 기술들에 기초하는 아니며 이들을 지원하는 무선 네트워크를 통하여, 하나 또는 그 초과의 무선 통신 링크들을 통해 통신할 수 있다는 것이 인식되어야 한다. 예를 들어, 일부 양상들에서, 컴퓨팅 디바이스 또는 서버는 무선 네트워크를 포함하는 네트워크와 연관될 수 있다. 일부 양상들에서, 네트워크는 신체 영역 네트워크 또는 개인 영역 네트워크(예를 들어, 초광대역 네트워크)를 포함할 수 있다. 일부 양상들에서, 네트워크는 LAN(local area network) 또는 WAN(wide area network)을 포함할 수 있다. 무선 디바이스는, 다양한 무선 통신 기술들, 프로토콜들, 또는 표준들, 예컨대, 예를 들어, CDMA, TDMA, OFDM, OFDMA, WiMAX, LTE, 및 Wi-Fi 중 하나 또는 그 초과의 것을 지원할 수 있거나 아니면 이들을 사용할 수 있다. 유사하게, 무선 디바이스는 다양한 대응하는 변조 또는 멀티플렉싱 방식들 중 하나 또는 그 초과의 것을 지원할 수 있거나 아니면 이들을 사용할 수 있다. 모바일 무선 디바이스는 다른 모바일 디바이스들, 셀 폰들, 다른 유선 및 무선 컴퓨터들, 인터넷 웹-사이트들 등과 무선으로 통신할 수 있다.
[0067] 본원의 교시들은 다양한 장치들(예를 들어, 디바이스들)에 통합(예를 들어, 이들 내에서 구현 또는 이들에 의해 수행)될 수 있다. 예를 들어, 본원에 교시된 하나 또는 그 초과의 양상들은, 폰(예를 들어, 셀룰러 폰), PDA(personal data assistant), 테블릿, 모바일 컴퓨터, 랩톱 컴퓨터, 테블릿, 엔터테인먼트 디바이스(예를 들어, 뮤직 또는 비디오 디바이스), 헤드셋(예를 들어, 헤드폰들, 이어피스 등), 메디컬 디바이스(예를 들어, 생체인식 센서, 심박수 측정기, 계보기(pedometer), EKG(Electrocardiography) 디바이스 등), 사용자 I/O 디바이스, 컴퓨터, 서버, POS(point-of-sale) 디바이스, 엔터테인먼트 디바이스, 셋톱 박스, 또는 임의의 다른 적절한 디바이스에 통합될 수 있다. 이들 디바이스들은 상이한 전력 및 데이터 요건들을 가질 수 있으며 각각의 피처 또는 피처들의 세트에 대해 발생되는 상이한 전력 프로파일들을 야기할 수 있다.
[0068] 일부 양상들에서, 무선 디바이스는 통신 시스템에 대한 액세스 디바이스(예를 들어, Wi-Fi 액세스 포인트)를 포함할 수 있다. 이러한 액세스 디바이스는, 예를 들어, 유선 또는 무선 통신 링크를 통해 다른 네트워크(예를 들어, 인터넷 또는 셀룰러 네트워크와 같은 광대역 네트워크)에 대한 접속성을 제공할 수 있다. 따라서, 액세스 디바이스는 다른 디바이스(예를 들어, Wi-Fi 스테이션)가 다른 네트워크 또는 일부 다른 기능에 액세스하는 것을 가능하게 할 수 있다. 또한, 디바이스들 중 하나 또는 둘다 휴대용일 수 있으며 또는 일부 경우들에서, 상대적으로 비휴대성일 수 있음을 인식해야 한다.
[0069] 정보 및 신호들이 다양한 상이한 기술들 및 기법들 중 임의의 기술 및 기법을 사용하여 표현될 수 있음을 당업자들은 이해할 것이다. 예를 들어, 상기 설명 전반에 걸쳐 참조될 수 있는 데이터, 명령들, 커맨드들, 정보, 신호들, 및 심볼들은 전압들, 전류들, 전자기파들, 자기장들 또는 자기 입자들, 광 필드 또는 광 입자들, 또는 이들의 임의의 결합에 의해 표현될 수 있다.
[0070] 당업자들은, 본 개시물과 관련하여 설명되는 다양한 예시적 논리 블록들, 모듈들, 회로들 및 알고리즘 단계들이 전자 하드웨어, 컴퓨터 소프트웨어, 또는 이 둘의 조합들로서 구현될 수 있다는 것을 추가로 인식할 것이다. 하드웨어와 소프트웨어의 상호교환성을 명확히 하기 위해, 다양한 예시적인 컴포넌트들, 블록들, 모듈들, 회로들, 및 알고리즘 단계들이 이들의 기능적 관점에서 설명되었다. 이러한 기능이 하드웨어로 구현되는지, 또는 소프트웨어로 구현되는지는 특정 애플리케이션 및 전체 시스템에 대해 부가된 설계 제한들에 의존한다. 당업자는 설명된 기능들을 각각의 특정 애플리케이션에 대해 다양한 방식으로 구현할 수 있지만, 이러한 구현 결정이 본 개시물의 범위를 벗어나는 것을 야기하는 것으로 해석되어서는 안 된다.
[0071] 본원에 개시된 실시예들과 관련하여 설명되는 다양한 예시적인 논리 블록들, 모듈들 및 회로들은 범용 프로세서, 디지털 신호 프로세서(DSP), 주문형 집적회로(ASIC), 필드 프로그래머블 게이트 어레이(FPGA) 또는 다른 프로그래머블 논리 디바이스, 이산 게이트 또는 트랜지스터 논리, 이산 하드웨어 컴포넌트들, 또는 본원에 설명된 기능들을 수행하도록 설계된 이들의 임의의 조합으로 구현 또는 수행될 수 있다. 범용 프로세서는 마이크로프로세서일 수 있지만, 대안적으로, 프로세서는 임의의 종래의 프로세서, 제어기, 마이크로제어기 또는 상태 머신일 수 있다. 또한, 프로세서는 컴퓨팅 디바이스들의 조합, 예를 들어 DSP 및 마이크로프로세서의 조합, 다수의 마이크로프로세서들, DSP 코어와 결합된 하나 또는 그 초과의 마이크로프로세서들, 또는 임의의 다른 이러한 구성으로서 구현될 수 있다.
[0072] 개시된 실시예들과 관련하여 설명된 알고리즘 또는 방법의 단계들은 하드웨어로, 프로세서에 의해 실행되는 소프트웨어 모듈로, 또는 이둘의 조합으로 직접 구체화될 수 있다. 소프트웨어 모듈들은 RAM 메모리, 플래쉬 메모리, ROM 메모리, PROM 메모리, EPROM 메모리, EEPROM 메모리, 레지스터, 하드디스크, 소거가능 디스크, CD-ROM, 또는 공지된 저장 매체의 임의의 형태로서 상주할 수 있다. 예시적인 저장매체는 프로세서와 결합되어, 프로세서는 저장매체로부터 정보를 판독하여 저장매체에 정보를 기록한다. 대안적으로, 저장 매체는 프로세서에 통합될 수 있다. 프로세서 및 저장 매체는 ASIC에 상주할 수 있다. ASIC은 사용자 단말 또는 컴퓨팅 장치에 상주할 수 있다. 대안적으로, 프로세서 및 저장 매체는 사용자 단말 또는 컴퓨팅 장치에서 이산 컴포넌트로서 상주할 수 있다.
[0073] 하나 또는 그 초과의 예시적 실시예들에서, 설명된 기능들은 하드웨어, 소프트웨어, 펌웨어 또는 이들의 결합으로 구현될 수 있다. 컴퓨터 프로그램 물건과 같은 소프트웨어로 구현될 경우, 기능들은, 비-일시적 컴퓨터 판독가능 매체 상의 하나 또는 그 초과의 명령들 또는 코드 상에 저장되거나 이를 통해 송신될 수 있다. 컴퓨터 판독가능한 매체는 컴퓨터 저장 매체 및 일 장소에서 다른 장소로 컴퓨터 프로그램의 전달을 가능하게 하는 임의의 매체를 포함하는 통신 매체 둘 다를 포함할 수 있다. 저장 매체는 컴퓨터에 의해 액세스될 수 있는 임의의 이용가능한 매체일 수 있다. 제한되지 않는 예로써, 이러한 비-일시적 컴퓨터-판독가능 매체는, RAM, ROM, EEPROM, CD-ROM 또는 다른 광학 디스크 저장소, 자기 디스크 저장소 또는 다른 자기 저장 장치들, 또는 명령들 또는 데이터 구조들의 형태로 원하는 프로그램 코드를 전달 또는 저장하는데 사용될 수 있고 컴퓨터에 의해 액세스될 수 있는 다른 매체를 포함할 수 있다. 또한, 임의의 연결 수단이 컴퓨터 판독가능한 매체로 적절히 지칭될 수 있다. 예를 들어, 소프트웨어가 웹사이트, 서버 또는 동축 케이블, 광섬유 케이블, 연선(twisted pair), DSL(digital subscriber line), 또는 적외선, 고주파(radio), 및 마이크로웨이브와 같은 무선 기술들을 이용한 다른 원격 소스로부터 송신되는 경우, 동축 케이블, 광섬유 케이블, 연선(twisted pair), DSL, 또는 적외선, 고주파(radio), 및 마이크로웨이브와 같은 무선 기술들은 매체의 정의에 포함된다. 여기서 사용되는 디스크(disk) 또는 디스크(disc)는 컴팩트 디스크(CD), 레이저 디스크, 광 디스크, DVD(digital versatile disc), 플로피 디스크 및 블루-레이(blu-ray) 디스크를 포함하며, 여기서 "디스크들(disks)"은 대게 데이터를 자기적으로 재생하며, "디스크들(discs)"은 데이터를 레이저로 광학적으로 재생한다. 이들의 조합들 또한 비-일시적 컴퓨터 판독가능 매체의 범주에 포함되어야 한다.
[0074] 개시된 실시예들의 상기 설명은 임의의 당업자가 본 발명을 이용하거나 또는 구성하는 것을 가능하게 하기 위해 제공된다. 이들 실시예들에 대한 다양한 변형들이 당업자들에게 명백할 것이며, 본원에 정의된 일반적인 원리들은 본 발명의 범위 및 사상을 이탈하지 않고 다른 실시예들에 적용될 수 있다. 따라서, 본 발명은 본원에 도시된 실시예들로 제한되도록 의도되는 것이 아니라, 본원에 개시된 원리들 및 신규한 특징들과 일치하는 최광의 범위를 따르도록 의도된다.
Claims (60)
- 모바일 디바이스에 의한 실내 포지션 결정을 위한 방법으로서,
실내 트랜시버 신호들에 기초하여 상기 모바일 디바이스의 제 1 실내 포지션을 결정하는 단계;
결정된 제 1 실내 포지션에 적어도 부분적으로 기초하여, GNSS(global navigation satellite system) 포지셔닝 신호들이 가시적임을 결정하는 단계; 및
GNSS 포지셔닝 신호들에 적어도 부분적으로 기초하여, 상기 모바일 디바이스의 제 2 실내 포지션을 결정하는 단계
를 포함하는, 모바일 디바이스에 의한 실내 포지션 결정을 위한 방법. - 제 1 항에 있어서,
상기 제 1 실내 포지션 및 상기 제 2 실내 포지션은 물리적 구조물 내부의 상기 모바일 디바이스의 포지션들이며, 상기 실내 트랜시버 신호들 및 상기 GNSS 포지셔닝 신호들은 상기 물리적 구조물내에서 상기 모바일 디바이스에 의해 수신되는, 모바일 디바이스에 의한 실내 포지션 결정을 위한 방법. - 제 1 항에 있어서,
상기 모바일 디바이스의 업데이트된 실내 포지션을 결정하는 단계를 더 포함하며, 상기 업데이트된 실내 포지션은, 상기 GNSS 포지셔닝 신호들로부터 결정된 상기 제 2 실내 포지션 및 상기 실내 트랜시버 신호들로부터 결정된 상기 제 1 실내 포지션에 기초하는, 모바일 디바이스에 의한 실내 포지션 결정을 위한 방법. - 제 3 항에 있어서,
상기 업데이트된 실내 포지션은 상기 제 2 실내 포지션 및 상기 제 1 실내 포지션의 가중된 평균이며, 상기 제 2 실내 포지션 및 상기 제 1 실내 포지션의 가중은 수신된 GNSS 포지셔닝 신호들의 세기에 기초하는, 모바일 디바이스에 의한 실내 포지션 결정을 위한 방법. - 제 1 항에 있어서,
상기 모바일 디바이스의 업데이트된 실내 포지션을 결정하는 단계를 더 포함하며, 상기 업데이트된 실내 포지션은 GNSS 포지셔닝 신호 및 실내 트랜시버 신호들 둘 다를 이용하여 계산되는, 모바일 디바이스에 의한 실내 포지션 결정을 위한 방법. - 제 5 항에 있어서,
상기 업데이트된 실내 포지션은, 상기 모바일 디바이스의 상기 업데이트된 실내 포지션의 결정시 상기 GNSS 포지셔닝 신호들의 포함이 상기 GNSS 포지셔닝 신호들 및 상기 실내 트랜시버 신호들의 조합의 DOP(dilution of precision)를 개선할 경우, 상기 GNSS 포지셔닝 신호들 및 상기 실내 트랜시버 신호들 둘 다에 의해 결정되는, 모바일 디바이스에 의한 실내 포지션 결정을 위한 방법. - 제 1 항에 있어서,
GNSS 포지셔닝 신호들이 가시적임을 결정하는 단계는,
상기 모바일 디바이스에 의해 GNSS 신호 가시성 데이터를 요청하는 단계 ―상기 GNSS 신호 가시성 데이터는 GNSS 신호들이 가시적일 수 있는 물리적 구조물 내의 하나 또는 그 초과의 실내 포지션들을 표시하는 데이터를 포함함―;
상기 모바일 디바이스에서 요청된 GNSS 신호 가시성 데이터를 수신하는 단계;
상기 모바일 디바이스의 상기 제 1 실내 포지션이 상기 물리적 구조물내의 상기 하나 또는 그 초과의 실내 포지션들 중 적어도 하나에 근접함을 결정함으로써, 상기 GNSS 포지셔닝 신호들이 가시적임을 결정하는 단계;
상기 GNSS 포지셔닝 신호들이 가시적임을 결정하는 것에 응답하여 상기 모바일 디바이스의 GNSS 수신기를 활성화시키는 단계; 및
상기 GNSS 수신기로 GNSS 포시셔닝 신호들을 수신하는 단계
를 더 포함하는, 모바일 디바이스에 의한 실내 포지션 결정을 위한 방법. - 제 7 항에 있어서,
상기 GNSS 신호 가시성 데이터는 물리적 구조물의 내부에 대한 맵의 적어도 일부를 포함하며, 상기 맵에는 사전-컴퓨팅된 폴리고날 구역이 포함되며(embedded), 상기 사전-컴퓨팅된 폴리고날 구역들의 내부 영역은 GNSS 신호들이 가시적인 물리적 구조물내의 로케이션을 표시하는, 모바일 디바이스에 의한 실내 포지션 결정을 위한 방법. - 제 7 항에 있어서,
GNSS 신호 가시성 데이터는 물리적 구조물의 내부에 대한 맵의 적어도 일부에 대응하는 하나 또는 그 초과의 그리드 포인트들을 포함하며, 각각의 그리드 포인트는 GNSS 신호들이 상기 물리적 구조물내의 그리드 포인트에서 가시적인지를 표시하는 데이터를 포함하는, 모바일 디바이스에 의한 실내 포지션 결정을 위한 방법. - 제 7 항에 있어서,
GNSS 포지셔닝 신호들의 수신 결과들을 보조 데이터 서버로 송신하는 단계를 더 포함하며, 상기 보조 데이터 서버는 상기 모바일 디바이스의 실제 GNSS 신호 수신 결과들에 기초하여 상기 GNSS 신호 가시성 데이터를 변경하는, 모바일 디바이스에 의한 실내 포지션 결정을 위한 방법. - 제 1 항에 있어서,
상기 제 1 실내 포지션은 하나 또는 그 초과의 무선 액세스 포인트들, 펨토셀들, 및 블루투스 트랜시버들을 포함하는 하나 또는 그 초과의 실내 트랜시버들로부터 수신되는 신호들에 기초하여 결정되는, 모바일 디바이스에 의한 실내 포지션 결정을 위한 방법. - 제 1 항에 있어서,
상기 제 1 실내 포지션을 결정하는 단계는,
결정된 제 1 포지션과 연관된 불확실성을 결정하는 단계; 및,
결정된 불확실성이 상기 실내 트랜시버 신호들로부터 정확한 실내 포지션이 추정되었음을 표시할 때, GNSS 포지셔닝 신호들의 사용없이 상기 제 1 실내 포지션을 상기 모바일 디바이스의 실내 포지션으로서 사용하는 단계
를 더 포함하는, 모바일 디바이스에 의한 실내 포지션 결정을 위한 방법. - 실내 포지션 결정을 가능하게 하기 위한 모바일 디바이스로서,
포지션 추정 엔진 및 검출기를 저장하는 메모리;
GNSS(global navigation satellite system) 수신기; 및
상기 메모리 및 상기 GNSS 수신기에 커플링된 프로세서
를 포함하며,
상기 프로세서는,
실내 트랜시버 신호들에 기초하여 상기 모바일 디바이스의 제 1 실내 포지션을 결정하고,
결정된 제 1 실내 포지션에 적어도 부분적으로 기초하여, GNSS(global navigation satellite system) 포지셔닝 신호들이 가시적임을 결정하고, 그리고
GNSS 포지셔닝 신호들에 적어도 부분적으로 기초하여, 상기 모바일 디바이스의 제 2 실내 포지션을 결정하도록,
상기 포지션 추정 엔진 및 상기 검출기를 실행시키도록 구성되는, 실내 포지션 결정을 가능하게 하기 위한 모바일 디바이스. - 제 13 항에 있어서,
상기 제 1 실내 포지션 및 상기 제 2 실내 포지션은 물리적 구조물 내부의 상기 모바일 디바이스의 포지션들이며, 상기 실내 트랜시버 신호들 및 상기 GNSS 포지셔닝 신호들은 상기 물리적 구조물내에서 상기 모바일 디바이스에 의해 수신되는, 실내 포지션 결정을 가능하게 하기 위한 모바일 디바이스. - 제 13 항에 있어서,
상기 프로세서는 추가로, 상기 모바일 디바이스의 업데이트된 실내 포지션을 결정하도록 구성되며,
상기 업데이트된 실내 포지션은 상기 GNSS 포지셔닝 신호들로부터 결정된 상기 제 2 실내 포지션 및 상기 실내 트랜시버 신호들로부터 결정된 상기 제 1 실내 포지션에 기초하는, 실내 포지션 결정을 가능하게 하기 위한 모바일 디바이스. - 제 15 항에 있어서,
상기 업데이트된 실내 포지션은 상기 제 2 실내 포지션 및 상기 제 1 실내 포지션의 가중된 평균이며, 상기 제 2 실내 포지션 및 상기 제 1 실내 포지션의 가중은 수신된 GNSS 포지셔닝 신호들의 세기에 기초하는, 실내 포지션 결정을 가능하게 하기 위한 모바일 디바이스. - 제 13 항에 있어서,
상기 프로세서는 추가로, 상기 모바일 디바이스의 업데이트된 실내 포지션을 결정하도록 구성되며, 상기 업데이트된 실내 포지션은 GNSS 포지셔닝 신호 및 실내 트랜시버 신호들 둘 다를 이용하여 계산되는, 실내 포지션 결정을 가능하게 하기 위한 모바일 디바이스. - 제 17 항에 있어서,
상기 업데이트된 실내 포지션은, 상기 모바일 디바이스의 상기 업데이트된 실내 포지션의 결정시 상기 GNSS 포지셔닝 신호들의 포함이 상기 GNSS 포지셔닝 신호들 및 상기 실내 트랜시버 신호들의 조합의 DOP(dilution of precision)를 개선시킬 때, 상기 GNSS 포지셔닝 신호들 및 상기 실내 트랜시버 신호들 둘 다에 의해 결정되는, 실내 포지션 결정을 가능하게 하기 위한 모바일 디바이스. - 제 13 항에 있어서,
상기 프로세서는,
상기 모바일 디바이스에 의해 GNSS 신호 가시성 데이터를 요청하는 것 ―상기 GNSS 신호 가시성 데이터는 GNSS 신호들이 가시적일 수 있는 물리적 구조물 내의 하나 또는 그 초과의 실내 포지션들을 표시하는 데이터를 포함함―;
상기 모바일 디바이스에서, 요청된 GNSS 신호 가시성 데이터를 수신하는 것;
상기 모바일 디바이스의 상기 제 1 실내 포지션이 적어도 상기 물리적 구조물내의 상기 하나 또는 그 초과의 실내 포지션들과 근접함을 결정함으로써, 상기 GNSS 포지셔닝 신호들이 가시적임을 결정하는 것;
상기 GNSS 포지셔닝 신호들이 가시적임을 결정하는 것에 응답하여, 상기 모바일 디바이스의 GNSS 수신기를 활성화시키는 것; 그리고
상기 GNSS 수신기로 GNSS 포시셔닝 신호들을 수신하는 것
에 의해, GNSS 포지셔닝 신호들이 가시적임을 결정하도록 구성되는, 실내 포지션 결정을 가능하게 하기 위한 모바일 디바이스. - 제 19 항에 있어서,
상기 GNSS 신호 가시성 데이터는 물리적 구조물의 내부에 대한 맵의 적어도 일부를 포함하며, 상기 맵에는 사전-컴퓨팅된 폴리고날 구역이 포함되며, 상기 사전-컴퓨팅된 폴리고날 구역들의 내부 영역은 GNSS 신호들이 가시적인 물리적 구조물내의 로케이션을 표시하는, 실내 포지션 결정을 가능하게 하기 위한 모바일 디바이스. - 제 19 항에 있어서,
GNSS 신호 가시성 데이터는 물리적 구조물의 내부에 대한 맵의 적어도 일부에 대응하는 하나 또는 그 초과의 그리드 포인트들을 포함하며, 각각의 그리드 포인트는 GNSS 신호들이 상기 물리적 구조물내의 그리드 포인트에서 가시적인지를 표시하는 데이터를 포함하는, 실내 포지션 결정을 가능하게 하기 위한 모바일 디바이스. - 제 19 항에 있어서,
상기 프로세서는 추가로, GNSS 포지셔닝 신호들의 수신 결과들을 보조 데이터 서버로 송신하도록 구성되며, 상기 보조 데이터 서버는 상기 모바일 디바이스의 실제 GNSS 신호 수신 결과들에 기초하여 상기 GNSS 신호 가시성 데이터를 변경하는, 실내 포지션 결정을 가능하게 하기 위한 모바일 디바이스. - 제 13 항에 있어서,
상기 제 1 실내 포지션은 하나 또는 그 초과의 무선 액세스 포인트들, 펨토셀들, 및 블루투스 트랜시버들을 포함하는 하나 또는 그 초과의 실내 트랜시버들로부터 수신되는 신호들에 기초하여 결정되는, 실내 포지션 결정을 가능하게 하기 위한 모바일 디바이스. - 제 13 항에 있어서,
상기 프로세서는,
결정된 제 1 포지션과 연관된 불확실성을 결정하는 것; 및,
결정된 불확실성이 상기 실내 트랜시버 신호들로부터 정확한 실내 포지션이 추정되었음을 표시할 때, GNSS 포지셔닝 신호들의 사용없이 상기 제 1 실내 포지션을 상기 모바일 디바이스의 실내 포지션으로서 사용하는 것
에 의해, 상기 제 1 실내 포지션을 결정하도록 구성되는, 실내 포지션 결정을 가능하게 하기 위한 모바일 디바이스. - 컴퓨터 판독가능한 저장 매체로서,
모바일 디바이스에 의한 실내 포지션 결정을 위해, 프로세서에 의해 수행될 때, 상기 프로세서로 하여금,
실내 트랜시버 신호들에 기초하여 상기 모바일 디바이스의 제 1 실내 포지션을 결정하게 하고;
결정된 제 1 실내 포지션에 적어도 부분적으로 기초하여, GNSS(global navigation satellite system) 포지셔닝 신호들이 가시적임을 결정하게 하고; 그리고
GNSS 포지셔닝 신호들에 적어도 부분적으로 기초하여, 상기 모바일 디바이스의 제 2 실내 포지션을 결정하게 하는
코드를 포함하는, 컴퓨터 판독가능한 저장 매체. - 제 25 항에 있어서,
상기 제 1 실내 포지션 및 상기 제 2 실내 포지션은 물리적 구조물 내부의 상기 모바일 디바이스의 포지션들이며, 상기 실내 트랜시버 신호들 및 상기 GNSS 포지셔닝 신호들은 상기 물리적 구조물내에서 상기 모바일 디바이스에 의해 수신되는, 컴퓨터 판독가능한 저장 매체. - 제 25 항에 있어서,
상기 프로세서로 하여금, 모바일 디바이스의 업데이트된 실내 포지션을 결정하게 하는 코드를 더 포함하고, 상기 업데이트된 실내 포지션은, 상기 GNSS 포지셔닝 신호들로부터 결정된 상기 제 2 실내 포지션 및 상기 실내 트랜시버 신호들로부터 결정된 상기 제 1 실내 포지션에 기초하는, 컴퓨터 판독가능한 저장 매체. - 제 25 항에 있어서,
상기 프로세서로 하여금, GNSS(global navigation satellite system) 포지셔닝 신호들이 가시적임을 결정하게 하는 코드는, 상기 프로세서로 하여금,
상기 모바일 디바이스에 의해 GNSS 신호 가시성 데이터를 요청하게 하고 ―상기 GNSS 신호 가시성 데이터는 GNSS 신호들이 가시적일 수 있는 물리적 구조물 내의 하나 또는 그 초과의 실내 포지션들을 표시하는 데이터를 포함함―;
상기 모바일 디바이스에서 요청된 GNSS 신호 가시성 데이터를 수신하게 하고;
상기 모바일 디바이스의 상기 제 1 실내 포지션이 상기 물리적 구조물내의 상기 하나 또는 그 초과의 실내 포지션들 중 적어도 하나에 근접함을 결정함으로써, 상기 GNSS 포지셔닝 신호들이 가시적임을 결정하게 하고;
상기 GNSS 포지셔닝 신호들이 가시적임을 결정하는 것에 응답하여 상기 모바일 디바이스의 GNSS 수신기를 활성화시키게 하고; 그리고
상기 GNSS 수신기로 GNSS 포시셔닝 신호들을 수신하게 하는
코드를 더 포함하는, 컴퓨터 판독가능한 저장 매체. - 제 28 항에 있어서,
상기 프로세서로 하여금, GNSS 포지셔닝 신호들의 수신 결과들을 보조 데이터 서버로 송신하게 하는 코드를 더 포함하며, 상기 보조 데이터 서버는 상기 모바일 디바이스의 실제 GNSS 신호 수신 결과들에 기초하여 상기 GNSS 신호 가시성 데이터를 변경하는, 컴퓨터 판독가능한 저장 매체. - 모바일 디바이스에 의한 실내 포지션 결정을 위한 시스템으로서,
실내 트랜시버 신호들에 기초하여 상기 모바일 디바이스의 제 1 실내 포지션을 결정하기 위한 수단;
결정된 제 1 실내 포지션에 적어도 부분적으로 기초하여, GNSS(global navigation satellite system) 포지셔닝 신호들이 가시적임을 결정하기 위한 수단; 및
GNSS 포지셔닝 신호들에 적어도 부분적으로 기초하여, 상기 모바일 디바이스의 제 2 실내 포지션을 결정하기 위한 수단
을 포함하는, 모바일 디바이스에 의한 실내 포지션 결정을 위한 시스템. - 제 30 항에 있어서,
상기 제 1 실내 포지션 및 상기 제 2 실내 포지션은 물리적 구조물 내부의 상기 모바일 디바이스의 포지션들이며, 상기 실내 트랜시버 신호들 및 상기 GNSS 포지셔닝 신호들은 상기 물리적 구조물내에서 상기 모바일 디바이스에 의해 수신되는, 모바일 디바이스에 의한 실내 포지션 결정을 위한 시스템. - 제 30 항에 있어서,
상기 모바일 디바이스의 업데이트된 실내 포지션을 결정하기 위한 수단을 더 포함하며, 상기 업데이트된 실내 포지션은, 상기 GNSS 포지셔닝 신호들로부터 결정된 상기 제 2 실내 포지션 및 상기 실내 트랜시버 신호들로부터 결정된 상기 제 1 실내 포지션에 기초하는, 모바일 디바이스에 의한 실내 포지션 결정을 위한 시스템. - 제 30 항에 있어서,
GNSS 포지셔닝 신호들이 가시적임을 결정하기 위한 수단은,
상기 모바일 디바이스에 의해 GNSS 신호 가시성 데이터를 요청하기 위한 수단 ―상기 GNSS 신호 가시성 데이터는 GNSS 신호들이 가시적일 수 있는 물리적 구조물내의 하나 또는 그 초과의 실내 포지션들을 표시하는 데이터를 포함함―;
상기 모바일 디바이스에서 요청된 GNSS 신호 가시성 데이터를 수신하기 위한 수단;
상기 모바일 디바이스의 상기 제 1 실내 포지션이 상기 물리적 구조물내의 상기 하나 또는 그 초과의 실내 포지션들 중 적어도 하나에 근접함을 결정함으로써, 상기 GNSS 포지셔닝 신호들이 가시적임을 결정하기 위한 수단;
상기 GNSS 포지셔닝 신호들이 가시적임을 결정하는 것에 응답하여 상기 모바일 디바이스의 GNSS 수신기를 활성화시키기 위한 수단; 및
상기 GNSS 수신기로 GNSS 포시셔닝 신호들을 수신하기 위한 수단
을 더 포함하는, 모바일 디바이스에 의한 실내 포지션 결정을 위한 시스템. - 제 33 항에 있어서,
GNSS 포지셔닝 신호들의 수신 결과들을 보조 데이터 서버로 송신하기 위한 수단을 더 포함하며, 상기 보조 데이터 서버는 상기 모바일 디바이스의 실제 GNSS 신호 수신 결과들에 기초하여 상기 GNSS 신호 가시성 데이터를 변경하는,
모바일 디바이스에 의한 실내 포지션 결정을 위한 시스템. - 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하는 서버 컴퓨터 시스템에 대한 방법으로서,
물리적 구조물의 맵을 수신하는 단계 ―상기 맵은 적어도 상기 물리적 구조물의 실세계 레이아웃을 나타내는 데이터를 포함함―;
GNSS(global navigation satellite system) 포지셔닝 신호들이 상기 물리적 구조물내의 대응하는 실세계 포지션에서 모바일 디바이스에 가시적인, 상기 맵에 관한 적어도 하나의 포지션을 포함하는 GNSS 신호 가시성 데이터를 결정하기 위해 상기 맵을 분석하는 단계; 및
상기 모바일 디바이스로부터의 요청에 응답하여 상기 모바일 디바이스에 상기 GNSS 신호 가시성 데이터를 제공하는 단계
를 포함하는, 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하는 서버 컴퓨터 시스템에 대한 방법. - 제 35 항에 있어서,
상기 요청은, 상기 모바일 디바이스가 상기 물리적 구조물 내부에 있고 상기 적어도 하나의 포지션에 대응하는 상기 물리적 구조물내의 실세계 포지션에 근접함을 표시하는, 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하는 서버 컴퓨터 시스템에 대한 방법. - 제 36 항에 있어서,
상기 모바일 디바이스로부터, 상기 적어도 하나의 포지션에 관한 GNSS 신호 포착 결과들을 수신하는 단계 ―상기 GNSS 신호 포착 결과들은 적어도, 상기 적어도 하나의 포지션에서 상기 모바일 디바이스가 GNSS 포지셔닝 신호를 수신하는 것에 대해 성공인지 또는 실패인지를 표시함―; 및
상기 GNSS 신호 포착 결과들에 기초하여 적어도 하나의 포지션에 대한 GNSS 포지셔닝 가시성 데이터를 변경하는 단계
를 더 포함하는, 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하는 서버 컴퓨터 시스템에 대한 방법. - 제 35 항에 있어서,
GNSS 신호 가시성 데이터를 결정하기 위해 상기 맵을 분석하는 단계는, 상기 적어도 하나의 포지션으로부터 프로젝팅되는 하나 또는 그 초과의 추적 광선들이 상기 물리적 구조물을 투과(penetrate)할 것인지 결정하기 위해, 상기 적어도 하나의 포지션에서 상기 맵에 대한 하늘 투과 분석(sky penetration analysis)을 수행하는 단계를 더 포함하는, 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하는 서버 컴퓨터 시스템에 대한 방법. - 제 37 항에 있어서,
복수의 추적 광선들은 상기 적어도 하나의 포지션으로부터 랜덤한 방향들로 프로젝팅되며,
전체(a total number of) 추적 광선들에 비교하여 상기 물리적 구조물을 투과하는 추적 광선들의 수는 상기 적어도 하나의 포지션에서 GNSS 신호 이용가능성의 레벨을 표시하는, 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하는 서버 컴퓨터 시스템에 대한 방법. - 제 37 항에 있어서,
상기 맵에 관한 복수의 포지션들은 하나 또는 그 초과의 폴리고날 구역들(polygonal areas)을 결정하기 위해 분석되며, 폴리고날 구역의 내부 영역은 GNSS 신호들이 가시적인 상기 물리적 구조물내의 영역을 표시하는, 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하는 서버 컴퓨터 시스템에 대한 방법. - 제 35 항에 있어서,
GNSS 신호 가시성 데이터를 결정하기 위한 상기 맵의 분석은 상기 모바일 디바이스로부터의 요청에 대한 수신 이전에 수행되는, 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하는 서버 컴퓨터 시스템에 대한 방법. - 제 35 항에 있어서,
GNSS 신호 가시성 데이터를 결정하기 위한 상기 맵의 분석은 상기 모바일 디바이스로부터의 요청에 대한 수신에 응답하여 수행되며, 상기 요청은, 상기 모바일 디바이스가 상기 물리적 구조물내에 있고 상기 적어도 하나의 포지션에 근접함을 표시하는, 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하는 서버 컴퓨터 시스템에 대한 방법. - 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하는 서버 컴퓨터 시스템으로서,
디렉토리 보조 엔진, 구조물 맵 분석 엔진, 및 물리적 구조물의 맵을 저장하는 메모리; 및
상기 메모리와 커플링되는 프로세서
를 포함하며, 상기 프로세서는,
물리적 구조물의 맵을 수신하고 ―상기 맵은 적어도 상기 물리적 구조물의 실세계 레이아웃을 나타내는 데이터를 포함함―;
GNSS(global navigation satellite system) 포지셔닝 신호들이 상기 물리적 구조물내의 대응하는 실세계 포지션에서 모바일 디바이스에 가시적인, 상기 맵에 관한 적어도 하나의 포지션을 포함하는 GNSS 신호 가시성 데이터를 결정하기 위해 상기 맵을 분석하고; 그리고
상기 모바일 디바이스로부터의 요청에 응답하여 상기 모바일 디바이스에 상기 GNSS 신호 가시성 데이터를 제공하도록
상기 디렉토리 보조 엔진 및 상기 구조물 맵 분석 엔진을 실행시키도록 구성되는, 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하는 서버 컴퓨터 시스템. - 제 43 항에 있어서,
상기 요청은, 상기 모바일 디바이스가 상기 물리적 구조물 내부에 있고 상기 적어도 하나의 포지션에 대응하는 상기 물리적 구조물내의 실세계 포지션에 근접함을 표시하는, 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하는 서버 컴퓨터 시스템. - 제 44 항에 있어서,
상기 메모리는 추가로 클라우드 소싱 분석 엔진을 저장하며,
상기 프로세서는 추가로,
상기 모바일 디바이스로부터, 상기 적어도 하나의 포지션에 관한 GNSS 신호 포착 결과들을 수신하고 ―상기 GNSS 신호 포착 결과들은 적어도, 상기 적어도 하나의 포지션에서 상기 모바일 디바이스가 GNSS 포지셔닝 신호를 수신하는 것에 대해 성공인지 또는 실패인지를 표시함―; 그리고
상기 GNSS 신호 포착 결과들에 기초하여 적어도 하나의 포지션에 대한 GNSS 포지셔닝 가시성 데이터를 변경하도록
상기 클라우드 소싱 분석 엔진을 실행시키도록 구성되는, 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하는 서버 컴퓨터 시스템. - 제 43 항에 있어서,
상기 프로세서는 추가로,
상기 적어도 하나의 포지션으로부터 프로젝팅되는 하나 또는 그 초과의 추적 광선들이 상기 물리적 구조물을 투과할 것인지 결정하기 위해, 상기 적어도 하나의 포지션에서 상기 맵에 대한 하늘 투과 분석을 수행함으로써 GNSS 신호 가시성 데이터를 결정하기 위해 상기 맵을 분석하도록 구성되는, 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하는 서버 컴퓨터 시스템. - 제 43 항에 있어서,
복수의 추적 광선들은 상기 적어도 하나의 포지션으로부터 랜덤한 방향들로 프로젝팅되며, 전체 추적 광선들에 비교하여 상기 물리적 구조물을 투과하는 추적 광선들의 수는 상기 적어도 하나의 포지션에서 GNSS 신호 이용가능성의 레벨을 표시하는, 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하는 서버 컴퓨터 시스템. - 제 43 항에 있어서,
상기 맵에 관한 복수의 포지션들은 하나 또는 그 초과의 폴리고날 구역들을 결정하기 위해 분석되며, 폴리고날 구역의 내부 영역은 GNSS 신호들이 가시적인 상기 물리적 구조물내의 영역을 표시하는, 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하는 서버 컴퓨터 시스템. - 제 43 항에 있어서,
GNSS 신호 가시성 데이터를 결정하기 위한 상기 맵의 분석은 상기 모바일 디바이스로부터의 요청에 대한 수신 이전에 수행되는, 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하는 서버 컴퓨터 시스템. - 제 43 항에 있어서,
GNSS 신호 가시성 데이터를 결정하기 위한 상기 맵의 분석은 상기 모바일 디바이스로부터의 요청에 대한 수신에 응답하여 수행되며, 상기 요청은, 상기 모바일 디바이스가 상기 물리적 구조물내에 있고 상기 적어도 하나의 포지션에 근접함을 표시하는, 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하는 서버 컴퓨터 시스템. - 컴퓨터 판독가능한 저장 매체로서,
모바일 디바이스에 의한 실내 포지션 결정을 가능하게 위해, 프로세서에 의해 수행될 때, 상기 프로세서로 하여금,
물리적 구조물의 맵을 수신하게 하고 ―상기 맵은 적어도 상기 물리적 구조물의 실세계 레이아웃을 나타내는 데이터를 포함함―;
GNSS(global navigation satellite system) 포지셔닝 신호들이 상기 물리적 구조물내의 대응하는 실세계 포지션에서 모바일 디바이스에 가시적인, 상기 맵에 관한 적어도 하나의 포지션을 포함하는 GNSS 신호 가시성 데이터를 결정하기 위해 상기 맵을 분석하게 하고; 그리고
상기 모바일 디바이스로부터의 요청에 응답하여 상기 모바일 디바이스에 상기 GNSS 신호 가시성 데이터를 제공하게 하는
코드를 포함하는, 컴퓨터 판독가능한 저장 매체. - 제 51 항에 있어서,
상기 요청은, 상기 모바일 디바이스가 상기 물리적 구조물 내부에 있고 상기 적어도 하나의 포지션에 대응하는 상기 물리적 구조물내의 실세계 포지션에 근접함을 표시하는, 컴퓨터 판독가능한 저장 매체. - 제 51 항에 있어서,
상기 프로세서에 의해 실행될 때, 상기 프로세서로 하여금,
상기 모바일 디바이스로부터, 상기 적어도 하나의 포지션에 관한 GNSS 신호 포착 결과들을 수신하게 하고 ―상기 GNSS 신호 포착 결과들은 적어도, 상기 적어도 하나의 포지션에서 상기 모바일 디바이스가 GNSS 포지셔닝 신호를 수신하는 것에 대해 성공인지 또는 실패인지를 표시함―; 그리고
상기 GNSS 신호 포착 결과들에 기초하여 적어도 하나의 포지션에 대한 GNSS 포지셔닝 가시성 데이터를 변경하게 하는
코드를 더 포함하는, 컴퓨터 판독가능한 저장 매체. - 제 51 항에 있어서,
GNSS 신호 가시성 데이터를 결정하기 위한 상기 맵의 분석은 상기 모바일 디바이스로부터의 요청에 대한 수신 이전에 수행되는, 컴퓨터 판독가능한 저장 매체. - 제 51 항에 있어서,
GNSS 신호 가시성 데이터를 결정하기 위한 상기 맵의 분석은 상기 모바일 디바이스로부터의 요청에 대한 수신에 응답하여 수행되며, 상기 요청은, 상기 모바일 디바이스가 상기 물리적 구조물내에 있고 상기 적어도 하나의 포지션에 근접함을 표시하는, 컴퓨터 판독가능한 저장 매체. - 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하는 서버 컴퓨터 시스템에 대한 시스템으로서,
물리적 구조물의 맵을 수신하기 위한 수단 ―상기 맵은 적어도 상기 물리적 구조물의 실세계 레이아웃을 나타내는 데이터를 포함함―;
GNSS(global navigation satellite system) 포지셔닝 신호들이 상기 물리적 구조물내의 대응하는 실세계 포지션에서 모바일 디바이스에 가시적인, 상기 맵에 관한 적어도 하나의 포지션을 포함하는 GNSS 신호 가시성 데이터를 결정하기 위해 상기 맵을 분석하기 위한 수단; 및
상기 모바일 디바이스로부터의 요청에 응답하여 상기 모바일 디바이스에 상기 GNSS 신호 가시성 데이터를 제공하기 위한 수단
을 포함하는, 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하는 서버 컴퓨터 시스템에 대한 시스템. - 제 56 항에 있어서,
상기 요청은, 상기 모바일 디바이스가 상기 물리적 구조물 내부에 있고 상기 적어도 하나의 포지션에 대응하는 상기 물리적 구조물내의 실세계 포지션에 근접함을 표시하는, 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하는 서버 컴퓨터 시스템에 대한 시스템. - 제 56 항에 있어서,
상기 모바일 디바이스로부터, 상기 적어도 하나의 포지션에 관한 GNSS 신호 포착 결과들을 수신하기 위한 수단 ―상기 GNSS 신호 포착 결과들은 적어도, 상기 적어도 하나의 포지션에서 상기 모바일 디바이스가 GNSS 포지셔닝 신호를 수신하는 것에 대해 성공인지 또는 실패인지를 표시함―; 및
상기 GNSS 신호 포착 결과들에 기초하여 적어도 하나의 포지션에 대한 GNSS 포지셔닝 가시성 데이터를 변경하기 위한 수단
을 더 포함하는, 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하는 서버 컴퓨터 시스템에 대한 시스템. - 제 56 항에 있어서,
GNSS 신호 가시성 데이터를 결정하기 위한 상기 맵의 분석은 상기 모바일 디바이스로부터의 요청에 대한 수신 이전에 수행되는, 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하는 서버 컴퓨터 시스템에 대한 시스템. - 제 56 항에 있어서,
GNSS 신호 가시성 데이터를 결정하기 위한 상기 맵의 분석은 상기 모바일 디바이스로부터의 요청에 대한 수신에 응답하여 수행되며, 상기 요청은, 상기 모바일 디바이스가 상기 물리적 구조물내에 있고 상기 적어도 하나의 포지션에 근접함을 표시하는, 모바일 디바이스에 의한 실내 포지션 결정을 가능하게 하는 서버 컴퓨터 시스템에 대한 시스템.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/791,358 US20140253371A1 (en) | 2013-03-08 | 2013-03-08 | Method and apparatus for enabling the use of global navigation satellite system (gnss) signals indoors |
| US13/791,358 | 2013-03-08 | ||
| PCT/US2014/020461 WO2014138142A2 (en) | 2013-03-08 | 2014-03-05 | Method and apparatus for enabling the use of global navigation satellite system (gnss) signals indoors |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20150127147A true KR20150127147A (ko) | 2015-11-16 |
Family
ID=50389511
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020157027136A KR20150127147A (ko) | 2013-03-08 | 2014-03-05 | Gnss(global navigation satellite system) 실내 신호들의 사용을 가능하게 하는 방법 및 장치 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20140253371A1 (ko) |
| EP (2) | EP2965117A2 (ko) |
| JP (1) | JP2016513793A (ko) |
| KR (1) | KR20150127147A (ko) |
| CN (1) | CN105008958A (ko) |
| WO (1) | WO2014138142A2 (ko) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3234628B1 (en) | 2014-12-19 | 2021-05-12 | HERE Global B.V. | A method, an apparatus and a computer program product for positioning |
| US20160219549A1 (en) * | 2015-01-22 | 2016-07-28 | Intel Corporation | SYSTEMS, METHODS, AND DEVICES FOR INDOOR POSITIONING USING Wi-Fi |
| EP3059611A1 (en) * | 2015-02-12 | 2016-08-24 | Agco Corporation | Gnss-based obstruction mapping |
| US10024975B2 (en) * | 2015-05-20 | 2018-07-17 | Finite State Research Llc | Method, system, and computer program product for GNSS receiver signal health and security analysis |
| KR20170019804A (ko) * | 2015-08-12 | 2017-02-22 | 삼성전자주식회사 | 전자 장치의 위치 정보 확인 방법 및 그 전자 장치 |
| US9823079B2 (en) | 2015-09-29 | 2017-11-21 | Apple Inc. | Polygonal routing |
| US10935663B2 (en) * | 2017-09-22 | 2021-03-02 | Qualcomm Incorporated | Satellite integrity monitoring with crowdsourced mobile device data |
| CN109932686B (zh) * | 2019-03-29 | 2022-01-04 | 维沃移动通信有限公司 | 一种定位方法、移动终端及室内定位系统 |
| US20220038196A1 (en) * | 2020-07-29 | 2022-02-03 | Zaheer Syed | Cross platform application for shared spectrum operations and certified professional installer management |
| US11218839B1 (en) * | 2020-10-05 | 2022-01-04 | Mapsted Corp. | Method and system for zone-based localization of mobile devices |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5812932A (en) * | 1995-11-17 | 1998-09-22 | Globalstar L.P. | Mobile satellite user information request system and methods |
| CN1155192A (zh) * | 1995-11-17 | 1997-07-23 | 环球星有限合伙人公司 | 移动卫星用户信息请求系统和方法 |
| JP4207668B2 (ja) * | 2003-05-26 | 2009-01-14 | セイコーエプソン株式会社 | 携帯端末測位システム |
| JP2006343161A (ja) * | 2005-06-08 | 2006-12-21 | Nec Corp | 測位システム、無線端末装置及びそれらに用いる測位方法並びにそのプログラム |
| US7616153B2 (en) * | 2006-08-04 | 2009-11-10 | Seiko Epson Corporation | Electronic device and time adjustment method |
| US8838481B2 (en) * | 2011-07-26 | 2014-09-16 | Golba Llc | Method and system for location based hands-free payment |
| JP2008298484A (ja) * | 2007-05-29 | 2008-12-11 | Kyocera Corp | 無線通信システム、移動端末、基地局、および移動端末の位置取得方法 |
| US20090189810A1 (en) * | 2008-01-24 | 2009-07-30 | Broadcom Corporation | Weighted aiding for positioning systems |
| WO2009099773A2 (en) * | 2008-02-01 | 2009-08-13 | Walker Jonathan B | Systems and methods for providing location based services (lbs) utilizing wlan and/or gps signals for seamless indoor and outdoor tracking |
| JP2010038895A (ja) * | 2008-07-09 | 2010-02-18 | Ntt Docomo Inc | 測位システム、測位方法及び測位プログラム |
| US8271189B2 (en) * | 2008-09-26 | 2012-09-18 | Qualcomm Incorporated | Enhanced database information for urban navigation |
| JP5587549B2 (ja) * | 2008-10-28 | 2014-09-10 | パナソニック株式会社 | ナビゲーションシステム |
| US7898471B2 (en) * | 2009-04-27 | 2011-03-01 | GTA Electronics Co., Ltd. | Power-saving position tracking device |
| JP5346776B2 (ja) * | 2009-11-02 | 2013-11-20 | 株式会社エヌ・ティ・ティ・ドコモ | 測位システム、測位方法及び測位プログラム |
| WO2011066473A1 (en) * | 2009-11-25 | 2011-06-03 | Maxlinear, Inc. | Co-operative geolocation |
| US8531333B2 (en) * | 2009-12-10 | 2013-09-10 | Maxlinear, Inc. | Intermittent tracking for GNSS |
| WO2011110899A1 (en) * | 2010-03-10 | 2011-09-15 | Nokia Corporation | Exchange of messages relating to positioning data |
| US9121937B2 (en) * | 2011-12-29 | 2015-09-01 | Google Technology Holdings LLC | Method and apparatus for tracking a global navigation satellite system within the constraints of an indoor facility |
| US9113291B2 (en) * | 2012-06-18 | 2015-08-18 | Qualcomm Incorporated | Location detection within identifiable pre-defined geographic areas |
| US9798010B2 (en) * | 2012-07-31 | 2017-10-24 | Qualcomm Incorporated | Devices, methods, and apparatuses for mobile device acquisition assistance |
| US9014974B2 (en) * | 2012-10-16 | 2015-04-21 | Qualcomm, Incorporated | Predictive scheduling of navigation tasks |
| US9942718B2 (en) * | 2013-07-03 | 2018-04-10 | Qualcomm Incorporated | Methods and apparatuses for use in providing location parameters to mobile applications |
-
2013
- 2013-03-08 US US13/791,358 patent/US20140253371A1/en not_active Abandoned
-
2014
- 2014-03-05 EP EP14713308.6A patent/EP2965117A2/en not_active Withdrawn
- 2014-03-05 WO PCT/US2014/020461 patent/WO2014138142A2/en active Application Filing
- 2014-03-05 KR KR1020157027136A patent/KR20150127147A/ko not_active Application Discontinuation
- 2014-03-05 JP JP2015561571A patent/JP2016513793A/ja active Pending
- 2014-03-05 EP EP17153571.9A patent/EP3185042A1/en not_active Withdrawn
- 2014-03-05 CN CN201480011992.6A patent/CN105008958A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| WO2014138142A3 (en) | 2014-12-04 |
| CN105008958A (zh) | 2015-10-28 |
| EP3185042A1 (en) | 2017-06-28 |
| WO2014138142A2 (en) | 2014-09-12 |
| EP2965117A2 (en) | 2016-01-13 |
| JP2016513793A (ja) | 2016-05-16 |
| US20140253371A1 (en) | 2014-09-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20150127147A (ko) | Gnss(global navigation satellite system) 실내 신호들의 사용을 가능하게 하는 방법 및 장치 | |
| JP6262314B2 (ja) | 地上測位システム較正 | |
| US20200322753A1 (en) | Calibrating a device for determining position in three-dimensional space | |
| JP6553172B2 (ja) | ロケーション関係データの選択的クラウドソーシング | |
| US8775065B2 (en) | Radio model updating | |
| US20200088834A1 (en) | Supporting the use of radio maps | |
| Bell et al. | WiFi-based enhanced positioning systems: accuracy through mapping, calibration, and classification | |
| US10595162B2 (en) | Access point environment characterization | |
| US8812023B2 (en) | Outdoor position estimation of a mobile device within a vicinity of one or more indoor environments | |
| US20150309183A1 (en) | Method of estimating the position of a device | |
| JP2017503366A (ja) | 無線ヒートマップのパラメータを学習するためにモバイルデバイスを利用すること | |
| US20190113365A1 (en) | Automatic pressure sensor output calibration for reliable altitude determination | |
| US20230003830A1 (en) | Stable and accurate indoor localization based on predictive hperbolic location fingerprinting | |
| JP2016536615A (ja) | アクセス・ポイント・データベースを向上させるための方法および装置 | |
| EP3232220B1 (en) | Method and device for estimating accuracy of a position determination |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WITN | Application deemed withdrawn, e.g. because no request for examination was filed or no examination fee was paid |