KR20150099570A - 별개의 컴퓨터 비전 기반 포즈 및 관성 센서 기반 포즈의 디스플레이 - Google Patents
별개의 컴퓨터 비전 기반 포즈 및 관성 센서 기반 포즈의 디스플레이 Download PDFInfo
- Publication number
- KR20150099570A KR20150099570A KR1020157019314A KR20157019314A KR20150099570A KR 20150099570 A KR20150099570 A KR 20150099570A KR 1020157019314 A KR1020157019314 A KR 1020157019314A KR 20157019314 A KR20157019314 A KR 20157019314A KR 20150099570 A KR20150099570 A KR 20150099570A
- Authority
- KR
- South Korea
- Prior art keywords
- mobile device
- based pose
- pose
- graphic
- vision
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Abandoned
Links
Images


Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
- G01C21/16—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation
- G01C21/165—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation combined with non-inertial navigation instruments
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/017—Gesture based interaction, e.g. based on a set of recognized hand gestures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
- G01C21/16—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation
- G01C21/165—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation combined with non-inertial navigation instruments
- G01C21/1656—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation combined with non-inertial navigation instruments with passive imaging devices, e.g. cameras
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C25/00—Manufacturing, calibrating, cleaning, or repairing instruments or devices referred to in the other groups of this subclass
- G01C25/005—Manufacturing, calibrating, cleaning, or repairing instruments or devices referred to in the other groups of this subclass initial alignment, calibration or starting-up of inertial devices
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/0304—Detection arrangements using opto-electronic means
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/0346—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor with detection of the device orientation or free movement in a three-dimensional [3D] space, e.g. 3D mice, 6-DOF [six degrees of freedom] pointers using gyroscopes, accelerometers or tilt-sensors
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/048—Interaction techniques based on graphical user interfaces [GUI]
- G06F3/0487—Interaction techniques based on graphical user interfaces [GUI] using specific features provided by the input device, e.g. functions controlled by the rotation of a mouse with dual sensing arrangements, or of the nature of the input device, e.g. tap gestures based on pressure sensed by a digitiser
-
- G06T7/0018—
-
- G06T7/0042—
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/80—Analysis of captured images to determine intrinsic or extrinsic camera parameters, i.e. camera calibration
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30204—Marker
- G06T2207/30208—Marker matrix
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Human Computer Interaction (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Manufacturing & Machinery (AREA)
- Automation & Control Theory (AREA)
- User Interface Of Digital Computer (AREA)
- Processing Or Creating Images (AREA)
- Studio Devices (AREA)
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/725,175 US10444845B2 (en) | 2012-12-21 | 2012-12-21 | Display of separate computer vision based pose and inertial sensor based pose |
| US13/725,175 | 2012-12-21 | ||
| PCT/US2013/073511 WO2014099410A1 (en) | 2012-12-21 | 2013-12-06 | Display of separate computer vision based pose and inertial sensor based pose |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20150099570A true KR20150099570A (ko) | 2015-08-31 |
Family
ID=49817312
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020157019314A Abandoned KR20150099570A (ko) | 2012-12-21 | 2013-12-06 | 별개의 컴퓨터 비전 기반 포즈 및 관성 센서 기반 포즈의 디스플레이 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US10444845B2 (enExample) |
| EP (1) | EP2936060B1 (enExample) |
| JP (1) | JP6285955B2 (enExample) |
| KR (1) | KR20150099570A (enExample) |
| CN (1) | CN104870941B (enExample) |
| BR (1) | BR112015015073A2 (enExample) |
| TW (2) | TWI552596B (enExample) |
| WO (1) | WO2014099410A1 (enExample) |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9292936B2 (en) * | 2013-01-09 | 2016-03-22 | Omiimii Ltd. | Method and apparatus for determining location |
| DE102015203968A1 (de) * | 2014-12-12 | 2016-06-16 | Robert Bosch Gmbh | Vorrichtung zum Abgleich und Selbsttest von Inertialsensoren und Verfahren |
| US9594980B1 (en) * | 2015-01-19 | 2017-03-14 | Ricoh Co., Ltd. | Image acquisition user interface for linear panoramic image stitching |
| JP6565465B2 (ja) | 2015-08-12 | 2019-08-28 | セイコーエプソン株式会社 | 画像表示装置、コンピュータープログラム、および画像表示システム |
| DE112016004079T5 (de) | 2015-09-09 | 2018-06-07 | Sony Corporation | Sensorvorrichtung, Sensorsystem und Informationsverarbeitungsvorrichtung |
| US10104282B2 (en) * | 2015-09-30 | 2018-10-16 | Ricoh Co., Ltd. | Yaw user interface |
| US10073531B2 (en) * | 2015-10-07 | 2018-09-11 | Google Llc | Electronic device pose identification based on imagery and non-image sensor data |
| CN105719299A (zh) * | 2016-01-22 | 2016-06-29 | 吉林大学 | 分离的计算机视觉位置及方向与惯性传感器位置及方向的显示 |
| US10078377B2 (en) | 2016-06-09 | 2018-09-18 | Microsoft Technology Licensing, Llc | Six DOF mixed reality input by fusing inertial handheld controller with hand tracking |
| JP2017224984A (ja) * | 2016-06-15 | 2017-12-21 | セイコーエプソン株式会社 | プログラム、装置、キャリブレーション方法 |
| DE102016211244B4 (de) * | 2016-06-23 | 2018-01-18 | Kuka Roboter Gmbh | Roboter-Bedienhandgerätverbund mit einem Grundsteuerungs-Lagesensor |
| JP2018009836A (ja) | 2016-07-12 | 2018-01-18 | セイコーエプソン株式会社 | プログラム、頭部装着型表示装置、キャリブレーション方法 |
| CN112184829A (zh) * | 2016-08-29 | 2021-01-05 | 华为技术有限公司 | 一种调整扫描状态的方法及装置 |
| EP4414951A3 (en) * | 2017-04-27 | 2024-11-13 | Magic Leap, Inc. | Light-emitting user input device |
| US10365710B2 (en) * | 2017-06-23 | 2019-07-30 | Seiko Epson Corporation | Head-mounted display device configured to display a visual element at a location derived from sensor data and perform calibration |
| US10970425B2 (en) * | 2017-12-26 | 2021-04-06 | Seiko Epson Corporation | Object detection and tracking |
| GB2573271B (en) * | 2018-03-27 | 2022-04-06 | Displaylink Uk Ltd | Data transmission to mobile devices |
| CN111829552B (zh) * | 2019-04-19 | 2023-01-06 | 北京魔门塔科技有限公司 | 一种视觉惯性系统的误差修正方法和装置 |
| CN111027438B (zh) * | 2019-12-03 | 2023-06-02 | Oppo广东移动通信有限公司 | 一种人体姿态的迁移方法、移动终端以及计算机存储介质 |
| CN112362084A (zh) * | 2020-11-23 | 2021-02-12 | 北京三快在线科技有限公司 | 一种数据标定方法、装置及数据标定系统 |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7554578B2 (en) | 2000-07-11 | 2009-06-30 | Phase One A/S | Digital camera with integrated accelerometers |
| JP4007899B2 (ja) * | 2002-11-07 | 2007-11-14 | オリンパス株式会社 | 運動検出装置 |
| DE10318500A1 (de) | 2003-04-24 | 2004-11-25 | Robert Bosch Gmbh | Vorrichtung und Verfahren zur Kalibrierung eines Bildsensors |
| JP4532856B2 (ja) | 2003-07-08 | 2010-08-25 | キヤノン株式会社 | 位置姿勢計測方法及び装置 |
| JP2005050189A (ja) | 2003-07-30 | 2005-02-24 | Canon Inc | 画像処理装置およびその方法並びにプログラムコード、記憶媒体 |
| JP4726194B2 (ja) | 2005-04-01 | 2011-07-20 | キヤノン株式会社 | キャリブレーション方法及び装置 |
| TWI348639B (en) | 2005-12-16 | 2011-09-11 | Ind Tech Res Inst | Motion recognition system and method for controlling electronic device |
| TWI341692B (en) | 2005-12-26 | 2011-05-01 | Ind Tech Res Inst | Online interactive multimedia system and the trasnsmission method thereof |
| TWI333156B (en) | 2007-08-16 | 2010-11-11 | Ind Tech Res Inst | Inertia sensing input controller and receiver and interactive system using thereof |
| US8255161B2 (en) | 2008-10-03 | 2012-08-28 | Honeywell International Inc. | System and method of auto-calibration of inertial sensors |
| KR101556150B1 (ko) * | 2008-12-31 | 2015-09-30 | 엘지전자 주식회사 | 드럼세탁기 |
| KR101557678B1 (ko) | 2009-04-22 | 2015-10-19 | 삼성전자주식회사 | 휴대 단말기의 캘리브레이션 방법 및 장치 |
| US8945720B2 (en) * | 2009-08-06 | 2015-02-03 | National Oilwell Varco, L.P. | Hard composite with deformable constituent and method of applying to earth-engaging tool |
| JP5448073B2 (ja) | 2010-01-12 | 2014-03-19 | 任天堂株式会社 | 情報処理装置、情報処理プログラム、情報処理システム、および、選択対象の選択方法 |
| US8855929B2 (en) | 2010-01-18 | 2014-10-07 | Qualcomm Incorporated | Using object to align and calibrate inertial navigation system |
| JP5564300B2 (ja) | 2010-03-19 | 2014-07-30 | 富士フイルム株式会社 | ヘッドマウント型拡張現実映像提示装置及びその仮想表示物操作方法 |
| US8694051B2 (en) | 2010-05-07 | 2014-04-08 | Qualcomm Incorporated | Orientation sensor calibration |
| US9052202B2 (en) | 2010-06-10 | 2015-06-09 | Qualcomm Incorporated | Use of inertial sensor data to improve mobile station positioning |
| JP5570316B2 (ja) * | 2010-06-17 | 2014-08-13 | キヤノン株式会社 | 撮像装置、その制御方法及びプログラム |
| US8705909B2 (en) * | 2010-07-16 | 2014-04-22 | Ibiden Co., Ltd. | Optical interconnect |
| US9341720B2 (en) | 2011-01-11 | 2016-05-17 | Qualcomm Incorporated | Camera-based position location and navigation based on image processing |
| US8952682B2 (en) * | 2011-02-11 | 2015-02-10 | Blackberry Limited | System and method for calibrating a magnetometer with visual affordance |
| US8912970B1 (en) * | 2011-03-18 | 2014-12-16 | The Boeing Company | Antenna element with integral faraday cage |
| US8912979B1 (en) * | 2011-07-14 | 2014-12-16 | Google Inc. | Virtual window in head-mounted display |
| US9270885B2 (en) | 2012-10-26 | 2016-02-23 | Google Inc. | Method, system, and computer program product for gamifying the process of obtaining panoramic images |
-
2012
- 2012-12-21 US US13/725,175 patent/US10444845B2/en active Active
-
2013
- 2013-12-06 JP JP2015549442A patent/JP6285955B2/ja active Active
- 2013-12-06 BR BR112015015073A patent/BR112015015073A2/pt not_active Application Discontinuation
- 2013-12-06 EP EP13811098.6A patent/EP2936060B1/en active Active
- 2013-12-06 CN CN201380066422.2A patent/CN104870941B/zh active Active
- 2013-12-06 WO PCT/US2013/073511 patent/WO2014099410A1/en not_active Ceased
- 2013-12-06 KR KR1020157019314A patent/KR20150099570A/ko not_active Abandoned
- 2013-12-20 TW TW102147644A patent/TWI552596B/zh not_active IP Right Cessation
- 2013-12-20 TW TW105112885A patent/TWI593289B/zh not_active IP Right Cessation
Also Published As
| Publication number | Publication date |
|---|---|
| US20140176418A1 (en) | 2014-06-26 |
| BR112015015073A2 (pt) | 2017-07-11 |
| EP2936060A1 (en) | 2015-10-28 |
| WO2014099410A1 (en) | 2014-06-26 |
| JP6285955B2 (ja) | 2018-02-28 |
| EP2936060C0 (en) | 2023-10-11 |
| TW201434315A (zh) | 2014-09-01 |
| TWI552596B (zh) | 2016-10-01 |
| CN104870941B (zh) | 2019-07-19 |
| US10444845B2 (en) | 2019-10-15 |
| JP2016502210A (ja) | 2016-01-21 |
| CN104870941A (zh) | 2015-08-26 |
| TWI593289B (zh) | 2017-07-21 |
| TW201630405A (zh) | 2016-08-16 |
| EP2936060B1 (en) | 2023-10-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
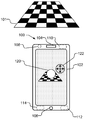
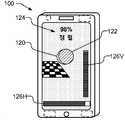
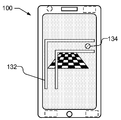
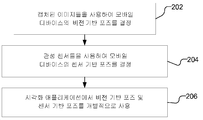
| US10444845B2 (en) | Display of separate computer vision based pose and inertial sensor based pose | |
| KR102131477B1 (ko) | 컴퓨터 비전 애플리케이션 초기화를 용이하게 하는 방법들 | |
| JP6043856B2 (ja) | Rgbdカメラを用いた頭部ポーズ推定 | |
| TWI544447B (zh) | 擴增實境的方法及系統 | |
| JP5660648B2 (ja) | マルチユーザ拡張現実におけるオンライン参照生成および追跡 | |
| JP6258953B2 (ja) | 単眼視覚slamのための高速初期化 | |
| CN103582893B (zh) | 用于增强现实表示的二维图像获取 | |
| US8933986B2 (en) | North centered orientation tracking in uninformed environments | |
| JP6456347B2 (ja) | 平面固有の特徴のターゲットのinsitu生成 | |
| JP5774226B2 (ja) | 方位センサに基づくホモグラフィ分解の曖昧性の解決 | |
| US20140320593A1 (en) | Monocular visual slam with general and panorama camera movements | |
| US20120195461A1 (en) | Correlating areas on the physical object to areas on the phone screen | |
| US12347043B2 (en) | Providing pose information | |
| KR20130018677A (ko) | 화상 처리 장치, 화상 처리 방법 및 프로그램 | |
| CN105719299A (zh) | 分离的计算机视觉位置及方向与惯性传感器位置及方向的显示 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20150716 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PG1501 | Laying open of application | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20181122 Comment text: Request for Examination of Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20191021 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20200221 |
|
| PC1904 | Unpaid initial registration fee |