KR20140053764A - 로봇 청소기 시스템 및 그 제어방법 - Google Patents
로봇 청소기 시스템 및 그 제어방법 Download PDFInfo
- Publication number
- KR20140053764A KR20140053764A KR1020130106870A KR20130106870A KR20140053764A KR 20140053764 A KR20140053764 A KR 20140053764A KR 1020130106870 A KR1020130106870 A KR 1020130106870A KR 20130106870 A KR20130106870 A KR 20130106870A KR 20140053764 A KR20140053764 A KR 20140053764A
- Authority
- KR
- South Korea
- Prior art keywords
- robot cleaner
- area
- remote control
- control device
- information
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 68
- 238000004140 cleaning Methods 0.000 claims abstract description 53
- 238000013507 mapping Methods 0.000 claims abstract description 44
- 238000005286 illumination Methods 0.000 claims description 44
- 230000006870 function Effects 0.000 claims description 23
- 230000009467 reduction Effects 0.000 claims description 4
- 238000012937 correction Methods 0.000 claims description 3
- 230000003213 activating effect Effects 0.000 claims description 2
- 230000015572 biosynthetic process Effects 0.000 claims description 2
- 238000004891 communication Methods 0.000 description 34
- 238000013461 design Methods 0.000 description 21
- 238000010586 diagram Methods 0.000 description 12
- 239000000428 dust Substances 0.000 description 7
- 230000002093 peripheral effect Effects 0.000 description 7
- 230000005236 sound signal Effects 0.000 description 6
- 230000004913 activation Effects 0.000 description 5
- 238000010295 mobile communication Methods 0.000 description 5
- 238000005516 engineering process Methods 0.000 description 4
- 238000005192 partition Methods 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 230000003068 static effect Effects 0.000 description 3
- 238000001514 detection method Methods 0.000 description 2
- 239000004973 liquid crystal related substance Substances 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 229910001220 stainless steel Inorganic materials 0.000 description 2
- 239000010935 stainless steel Substances 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- 239000010936 titanium Substances 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 230000008030 elimination Effects 0.000 description 1
- 238000003379 elimination reaction Methods 0.000 description 1
- 239000010408 film Substances 0.000 description 1
- 238000001746 injection moulding Methods 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000003909 pattern recognition Methods 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 238000000638 solvent extraction Methods 0.000 description 1
- 229920003002 synthetic resin Polymers 0.000 description 1
- 239000000057 synthetic resin Substances 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
- 229910052719 titanium Inorganic materials 0.000 description 1
Images


















Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/32—Carpet-sweepers
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/0011—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot associated with a remote control arrangement
- G05D1/0016—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot associated with a remote control arrangement characterised by the operator's input device
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2894—Details related to signal transmission in suction cleaners
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L1/00—Cleaning windows
- A47L1/02—Power-driven machines or devices
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4002—Installations of electric equipment
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4011—Regulation of the cleaning machine by electric means; Control systems and remote control systems therefor
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/0011—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot associated with a remote control arrangement
- G05D1/0033—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot associated with a remote control arrangement by having the operator tracking the vehicle either by direct line of sight or via one or more cameras located remotely from the vehicle
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30204—Marker
Abstract
본 발명은 로봇 청소기 시스템 및 그 제어방법에 관한 것이다.
본 발명의 일실시예에 따르면, 자동으로 주행하면서 청소를 수행하는 로봇 청소기; 상기 로봇 청소기의 충전대; 그리고 상기 로봇 청소기를 원격으로 제어하는 원격 제어 장치를 포함하며, 상기 원격 제어 장치는, 카메라를 통해 생성되는 로봇 청소기와 상기 로봇 청소기의 주변 영역에 대한 영상 정보 또는 상기 충전대와 상기 충전대의 주변 영역에 대한 영상 정보를 통해, 실제 영역과 가상 영역의 매핑 정보를 생성함을 특징으로 하는 로봇 청소기 시스템 및 이의 제어방법을 제공할 수 있다.
본 발명의 일실시예에 따르면, 자동으로 주행하면서 청소를 수행하는 로봇 청소기; 상기 로봇 청소기의 충전대; 그리고 상기 로봇 청소기를 원격으로 제어하는 원격 제어 장치를 포함하며, 상기 원격 제어 장치는, 카메라를 통해 생성되는 로봇 청소기와 상기 로봇 청소기의 주변 영역에 대한 영상 정보 또는 상기 충전대와 상기 충전대의 주변 영역에 대한 영상 정보를 통해, 실제 영역과 가상 영역의 매핑 정보를 생성함을 특징으로 하는 로봇 청소기 시스템 및 이의 제어방법을 제공할 수 있다.
Description
본 발명은 로봇 청소기 시스템 및 그 제어방법에 관한 것이다.
진공 청소기는 실내의 바닥이나 카페트 등을 청소하기 위한 장치로서, 청소기 본체 내부에 구비되어 공기 흡입력을 발생시키는 모터와 팬 등으로 구성되는 공기 흡입장치의 구동에 의해 이물질이 포함된 공기를 외부로부터 흡입한 후, 이물질을 분리하여 집진하고, 이물질이 분리된 정화공기를 청소기 외부로 배출하는 장치이다.
진공 청소기는 사용자에 의해 직접 조작되는 수동 진공 청소기와 사용자의 조작 없이 스스로 청소를 수행하는 로봇 청소기를 포함할 수 있다.
여기서, 로봇 청소기는 청소하고자 하는 구역 내를 스스로 주행하면서 바닥으로부터 먼지 등의 이물질을 흡입한다. 또한, 로봇 청소기는 이에 마련된 장애물 센서 기타 센서를 이용하여 청소 영역을 자동으로 주행하면서 청소하거나 로봇 청소기와 무선 접속된 리모컨을 이용하여 수동으로 로봇 청소기가 주행하면서 청소하도록 조종할 수 있다.
그런데, 이러한 로봇 청소기에는 사용자와 로봇 청소기 간의 상대적인 위치를 정확히 측정하기 위한 구성이 마련되지 않는바, 사용자와 로봇 청소기 간의 상대적인 위치에 기초한 각종의 위치 기반 서비스를 제공할 수 없는 문제점이 있다.
이에 더불어 로봇 청소기의 수동으로 조정하는 경우에는 로봇 청소기의 이동 경로를 리모컨에 마련된 방향키 등을 이용하여 실시간으로 변경하여야 하는데, 방향키의 입력시마다 로봇 청소기의 동작에 딜레이가 발생되고, 방향키의 조작성이 불편함에 따라 로봇 청소기를 정밀하게 조정할 수 없는 문제점이 있다.
아울러, 이러한 로봇 청소기의 무선 조정은 사용자가 로봇 청소기를 직접 주시하면서 수행할 수밖에 없는 문제가 있다. 다시 말하면, 복수 개의 영역이 서로 구획된 청소 영역을 청소하는 경우, 로봇 청소기의 무선 조정이 가능하기 위해서는 로봇 청소기와 사용자는 항상 동일 영역에 위치하여 한다. 즉, 사용자가 다른 영역에서 위치하여 로봇 청소기를 주시할 수 없는 경우, 효과적으로 로봇 청소기의 무선 조정이 불가능하게 된다.
한편, 종래의 로봇 청소기를 무선 컨트롤하는 경우 사용자에게 유희를 제공할 수 없는 문제가 있다. 따라서, 사용자는 기본적인 자동 청소모드만을 사용하는 것이 일반적이라, 무선 컨트롤을 수행할 필요성이 매우 적은 것이 현실이다.
본 발명은 기본적으로 전술한 로봇 청소기와 이를 포함하는 로봇 청소기 시스템의 문제를 해결하고자 함을 목적으로 한다.
본 발명의 일실시예를 통하여, 청소라는 로봇 청소기의 고유 기능뿐만 아니라 사용자에게 유희를 제공하여 제품 신뢰성 및 만족도를 증진시킬 수 있는 로봇 청소기 시스템 및 그 제어방법을 제공하고자 한다.
본 발명의 일실시예를 통하여, 로봇 청소기와 사용자 간의 상대적인 위치를 정확하게 측정할 수 있는 로봇 청소기 시스템 및 그 제어방법을 제공하고자 한다.
본 발명의 일실시예를 통하여, 일단 무선 컨트롤이 시작되면 사용자가 직접 로봇 청소기를 보지 않고도 효과적으로 로봇 청소기를 무선으로 컨트롤할 수 있는 로봇 청소기 시스템 및 그 제어방법을 제공하고자 한다.
본 발명의 일실시예를 통하여, 효과적으로 원격제어장치의 디스플레이에서 인지되는 청소 영역과 실제 청소 영역을 매핑할 수 있는 로봇 청소기 시스템 및 그 제어방법을 제공하고자 한다.
본 발명의 일실시예를 통하여, 로봇 청소기의 외형 디자인의 훼손이 방지될 수 있고, 더 나아가 사용자가 로봇 청소기를 통해 무선 조정 진행 여부를 용이하게 파악할 수 있는 로봇 청소기 시스템 및 그 제어방법을 제공하고자 한다.
본 발명의 일실시예를 통하여, 로봇 청소기와 사용자 간의 위치 정보를 기초로 하는 위치 기반 서비스를 제공하여 편의성을 증진시킬 수 있는 로봇 청소기 시스템 및 그 제어방법을 제공하고자 한다.
본 발명의 일실시예를 통하여, 원격 제어 장치의 디스플레이부에 표시된 로봇 청소기와 그 주변 영역에 대한 영상에 대한 터치 입력을 통하여, 로봇 청소기를 정교하고 직관적으로 조정할 수 있는 로봇 청소기 시스템 및 그 제어방법을 제공하고자 한다.
전술한 목적을 구현하기 위하여, 본 발명의 일실시예에 따르면, 자동으로 주행하면서 청소를 수행하는 로봇 청소기; 상기 로봇 청소기의 충전대; 그리고 상기 로봇 청소기를 원격으로 제어하는 원격 제어 장치를 포함하며, 상기 원격 제어 장치는, 카메라를 통해 생성되는 로봇 청소기와 상기 로봇 청소기의 주변 영역에 대한 영상 정보 또는 상기 충전대와 상기 충전대의 주변 영역에 대한 영상 정보를 통해, 실제 영역과 가상 영역의 매핑 정보를 생성함을 특징으로 하는 로봇 청소기 시스템을 제공할 수 있다. 상기 매핑 정보를 바탕으로 하여 위치 기반 서비스를 수행하거나 제공할 수 있다. 구체적으로 상기 로봇 청소기를 무선으로 제어할 수 있다.
여기서, 상기 충전대는 경우에 따라서 생략될 수 있다. 즉, 상기 로봇 청소기 시스템이 상기 충전대를 포함하지 않을 수 있다. 이 경우에는, 상기 충전대를 통한 영상 정보의 생성 등이 필요하지 않을 수 있다. 즉, 로봇 청소기를 통한 위치 기반 서비스만 수행될 수 있을 것이다.
상기 원격 제어 장치는, 상기 영상 정보를 통해, 상기 로봇 청소기 또는 충전대를 감지하여 상기 로봇 청소기의 위치 정보와 자세 정보 또는 상기 충전대의 위치 정보와 자세 정보를 생성할 수 있다.
상기 원격 제어 장치는, 상기 로봇 청소기의 실제 형상 또는 상기 충전대의 실제 형상과 상기 영상 정보를 통해 파악되는 상대적인 형성을 비교하여, 상기 실제 영역과 가상 영역의 매핑 정보를 생성할 수 있다.
상기 로봇 청소기 또는 상기 충전대에는 상기 매핑 정보 생성을 위한 인식 수단이 구비됨이 바람직하다. 이러한 인식 수단은 카메라를 통해 명확히 인식될 수 있는 수단일 수 있다. 그러나, 사용자가 직접 볼 수 있는 형태의 인식 수단임이 바람직하다. 즉, 가시광선을 통해 인식할 수 있는 수단임이 바람직하다.
상기 원격 제어 장치는, 상기 인식 수단의 실제 형상 정보와 상기 영상 정보에 의해 파악되는 상대적인 형상 정보를 비교하여, 상기 매핑 정보를 생성할 수 있다.
상기 원격 제어 장치는, 상기 영상 정보를 표시하는 디스플레이부; 그리고 상기 로봇 청소기의 제어 신호를 입력하는 입력부를 포함할 수 있다. 여기서, 상기 디스플레이부는 터치 입력을 감지하는 터치 센서를 포함하여 상기 입력부로서 기능하는 것이 바람직하다. 따라서, 단순한 버튼 아이콘을 터치하는 것 이상으로 디스플레이되는 가상 영역 상에서 임의의 패턴 형성 및 이를 통한 로봇 청소기의 무선 제어가 용이하게 가능할 수 있다. 이를 통해서 단순한 청소 수행뿐만 아니라 사용자에게 유희를 제공할 수 있다.
상기 인식 수단은 상기 로봇 청소기 또는 충전대의 본체 외주면에 구비되는 인식 마크를 포함할 수 있다. 상기 인식 마크는 상기 본체 외주면에 선택적으로 착탈 가능하도록 구비될 수 있다.
상기 인식 수단은 상기 로봇 청소기의 본체에 복수 개소에 구비됨이 바람직하다. 이를 통해서 개개의 인식 수단에서 발생될 수 있는 왜곡과 이를 통한 오차를 최소화할 수 있어 더욱 정교한 무선 제어가 가능할 수 있다.
상기 인식 수단은 로봇 청소기 본체 또는 충전대의 본체 내부에서 상기 본체 외부를 향하여 빛을 공급하는 LED 조명을 포함할 수 있다. 이러한 LED 조명은 선택적으로 활성화될 수 있다. 즉, 평상시에는 불활성화되어 있고 원격 제어를 위해서 활성화될 수 있다.
상기 로봇 청소기 또는 충전대의 본체의 외벽은 외부에서부터 컬러층과 반사층을 포함하여 이루어지고, 상기 LED 조명은 상기 반사층 하부에 구비됨이 바람직하다. 따라서, 상기 LED 조명이 불활성화 상태에서 상기 LED 조명이 상기 본체의 외벽 외부로 가시적인 노출이 배제됨이 바람직하다. 이를 통해서 고유의 외부 디자인이 훼손되지 않을 수 있다. 또한 미니멀한 외관 디자인을 구현할 수 있다.
상기 LED 조명은 상기 원격 제어 장치에서 상기 로봇 청소기를 제어하기 위한 어플리케이션의 실행 시에 상기 원격 제어 장치의 제어 신호를 통해 활성화될 수 있다. 여기서, 상기 어플리케이션은 원격 제어뿐만 아니라 다른 용도를 위한 복합적인 어플리케이션일 수 있다. 따라서, 상기 어플리케이션은 원격 제어를 시작하기 위한 아이콘뿐만 아니라 기타 다른 아이콘을 포함할 수 있다.
이 경우, 물론 다른 아이콘이 입력되는 경우도 가능하겠지만, 상기 원격 제어 시작을 위한 아이콘 입력 시 상기 LED 조명이 활성화될 수 있을 것이다.
전술한 목적을 구현하기 위하여, 본 발명의 일실시예에 따르면, 로봇 청소기, 상기 로봇 청소기의 충전대 그리고 카메라 및 디스플레이부를 갖는 원격 제어 장치를 포함하는 로봇 청소기 시스템의 제어방법에 있어서, 상기 카메라를 통해 상기 로봇 청소기 또는 충전대와 주변 영역에 대한 영상 정보를 생성하는 단계; 상기 영상 정보를 통해서 실제 영역과 상기 디스플레이부에 나타나는 가상 영역을 매핑하는 단계; 그리고 상기 디스플레이부에 나타나는 가상 영역을 통하여 상기 로봇 청소기의 위치 기반 서비스가 수행되는 단계를 포함하는 로봇 청소기 시스템의 제어방법이 제공될 수 있다.
상기 매핑 단계는, 상기 영상 정보를 기초로 상기 로봇 청소기 또는 충전대를 감지하는 단계; 그리고 상기 로봇 청소기 또는 충전대의 위치 정보를 생성하는 단계를 포함할 수 있다.
상기 감지하는 단계는, 상기 영상 정보의 이미지를 개선하기 위하여, 이미지의 밝기 조정, 노이즈 제거 및 컬러 보정 중 적어도 어느 하나를 포함하여 수행할 수 있다.
상기 위치 기반 서비스를 제공하는 단계에서는, 상기 가상 영역에서의 상기 로봇 청소기의 주행 입력이 상기 매핑 정보를 통하여 상기 실제 영역에서의 상기 로봇 청소기의 주행 명령 신호로 변환되어 전달될 수 있다.
상기 위치 기반 서비스를 제공하는 단계에서는, 상기 디스플레이부에 나타나는 가상 영역에 대한 터치 입력을 통하여 상기 로봇 청소기의 주행 명령 신호가 생성됨이 바람직하다.
상기 위치 기반 서비스는, 상기 로봇 청소기의 이동 경로 설정 기능, 청소 영역 지정 기능, 청소 금지 영역 지정, 그리고 사용자 위치로 접근 설정 기능 중 적어도 어느 하나를 포함하는 것이 바람직하다.
상기 로봇 청소기 또는 충전대에 구비되는 인식 수단을 활성화시키는 단계가 더 포함됨이 바람직하다. 따라서, 평상 시에는 로봇 청소기 또는 충전대의 자체적인 외부 디자인일 그대로 유지될 수 있을 것이다.
본 발명의 일실시예를 통하여, 청소라는 로봇 청소기의 고유 기능뿐만 아니라 사용자에게 유희를 제공하여 제품 신뢰성 및 만족도를 증진시킬 수 있는 로봇 청소기 시스템 및 그 제어방법을 제공할 수 있다.
본 발명의 일실시예를 통하여, 로봇 청소기와 사용자 간의 상대적인 위치를 정확하게 측정할 수 있는 로봇 청소기 시스템 및 그 제어방법을 제공할 수 있다.
본 발명의 일실시예를 통하여, 사용자가 직접 로봇 청소기를 보지 않고도 효과적으로 로봇 청소기를 무선으로 컨트롤할 수 있는 로봇 청소기 시스템 및 그 제어방법을 제공할 수 있다.
본 발명의 일실시예를 통하여, 효과적으로 원격제어장치의 디스플레이에서 인지되는 청소 영역과 실제 청소 영역을 매핑할 수 있는 로봇 청소기 시스템 및 그 제어방법을 제공할 수 있다.
본 발명의 일실시예를 통하여, 로봇 청소기의 외형 디자인의 훼손이 방지될 수 있고, 더 나아가 사용자가 로봇 청소기를 통해 무선 조정 진행 여부를 용이하게 파악할 수 있는 로봇 청소기 시스템 및 그 제어방법을 제공할 수 있다.
본 발명의 일실시예를 통하여, 로봇 청소기와 사용자 간의 위치 정보를 기초로 하는 위치 기반 서비스를 제공하여 편의성을 증진시킬 수 있는 로봇 청소기 시스템 및 그 제어방법을 제공할 수 있다.
본 발명의 일실시예를 통하여, 원격 제어 장치의 디스플레이부에 표시된 로봇 청소기와 그 주변 영역에 대한 영상에 대한 터치 입력을 통하여, 로봇 청소기를 정교하고 직관적으로 조정할 수 있는 로봇 청소기 시스템 및 그 제어방법을 제공할 수 있다.
도 1은 본 발명의 일 실시예에 따른 로봇 청소기를 나타내는 사시도이다.
도 2는 본 발명의 일 실시예에 따른 로봇 청소기의 내부 구성을 나타내는 사시도이다.
도 3은 본 발명의 일 실시예에 따른 로봇 청소기의 하부 사시도이다.
도 4는 본 발명의 일 실시예에 따른 로봇 청소기 시스템을 구성하는 로봇 청소기의 블록 구성도이다.
도 5는 본 발명의 일 실시예에 따른 로봇 청소기 시스템을 구성하는 원격 장치 장치의 블록 구성도이다.
도 6은 본 발명의 일 실시예에 따른 로봇 청소시 시스템을 구성하는 원격 제어 장치를 전면에서 바라본 사시도이다.
도 7은 본 발명의 일 실시예에 따른 로봇 청소기 시스템을 구성하는 원격 제어 장치를 후면 사시도이다.
도 8은 본 발명의 일 실시예에 따른 로봇 청소기 시스템에 있어서, 로봇 청소기(100)의 영상 정보를 생성하는 방법을 설명하기 위한 도면이며,
도 9는 본 발명의 일 실시예에 따른 로봇 청소기 시스템에 있어서, 로봇 청소기의 위치 정보를 생성하는 방법을 설명하기 위한 도면이다.
도 9a는 로봇 청소기에 마련된 인식 마크의 실제 형상을 나타내는 도면이다.
도 9b는 영상 정보의 이미자 상으로 파악되는 인식 마크의 상대적인 형상을 나타내는 도면이다.
도 9c는 원격 제어 장치를 이용한 로봇 청소기의 위치 정보 생성에 대하여 설명하기 위한 도면이다.
도 9d는 로봇 청소기의 자세를 감지하기 위한 도면이다.
도 10 내지 13은 본 발명의 일 실시예에 따른 로봇 청소기 시스템이 제공하는 로봇 청소기의 위치 기반 서비스를 설명하기 위한 도면이다.
도 10a는 디스플레이부에 대한 터치 입력을 통한 로봇 청소기의 청소 영역 설정 방법에 대하여 설명하기 위한 도면이다.
도 10b는 로봇 청소기가 설정된 청소 영역안에서 청소를 수행하는 상태를 설명하기 위한 도면이다.
도 11은 디스플레이부에 대한 터치 입력을 통한 로봇 청소기의 이동 경로 설정 방법에 대하여 설명하기 위한 도면이다.
도 12는 디스플레이부에 대한 터치 입력을 통한 로봇 청소기의 청소 금지 영역 설정 방법에 대하여 설명하기 위한 도면이다.
도 13은 로봇 청소기를 사용자의 위치로 호출하는 방법을 설명하기 위한 도면이다.
도 14는 본 발명의 일 실시예에 따른 로봇 청소기 시스템 제어방법의 기본적인 구성을 설명하기 위한 흐름도이다.
도 15는 본 발명의 일 실시예에 따른 로봇 청소기 시스템 제어방법에 있어서 로봇 청소기를 감지하는 단계를 설명하기 위한 흐름도이다.
도 16은 본 발명의 일 실시예에 따른 로봇 청소기 시스템 제어방법에 있어서, 위치 기반 서비스를 제공하는 단계를 설명하기 위한 흐름도이다.
도 17은 본 발명의 또 다른 일 실시예에 따른 로봇 청소기 시스템의 제어방법에 있어서 로봇 청소기를 감지하는 단계를 설명하기 위한 흐름도이다.
도 18은 본 발명의 일 실시예에 따른 로봇 청소기 시스템에 포함될 수 있는 충전대의 일례를 도시한 사시도이다.
도 19는 본 발명의 일 실시예에 따른 로봇 청소기의 인식 수단의 일례로 조명 이미지를 나타내는 개념도이다.
도 20은 도 19에 도시된 조명 이미지의 활성화 전과 활성화 후를 비교한 도면이다.
도 21은 인식 수단의 일 형태들을 도시한 도면이다.
도 22는 원격 제어 장치에서 어플리케이션을 실행한 초기 화면이다.
도 2는 본 발명의 일 실시예에 따른 로봇 청소기의 내부 구성을 나타내는 사시도이다.
도 3은 본 발명의 일 실시예에 따른 로봇 청소기의 하부 사시도이다.
도 4는 본 발명의 일 실시예에 따른 로봇 청소기 시스템을 구성하는 로봇 청소기의 블록 구성도이다.
도 5는 본 발명의 일 실시예에 따른 로봇 청소기 시스템을 구성하는 원격 장치 장치의 블록 구성도이다.
도 6은 본 발명의 일 실시예에 따른 로봇 청소시 시스템을 구성하는 원격 제어 장치를 전면에서 바라본 사시도이다.
도 7은 본 발명의 일 실시예에 따른 로봇 청소기 시스템을 구성하는 원격 제어 장치를 후면 사시도이다.
도 8은 본 발명의 일 실시예에 따른 로봇 청소기 시스템에 있어서, 로봇 청소기(100)의 영상 정보를 생성하는 방법을 설명하기 위한 도면이며,
도 9는 본 발명의 일 실시예에 따른 로봇 청소기 시스템에 있어서, 로봇 청소기의 위치 정보를 생성하는 방법을 설명하기 위한 도면이다.
도 9a는 로봇 청소기에 마련된 인식 마크의 실제 형상을 나타내는 도면이다.
도 9b는 영상 정보의 이미자 상으로 파악되는 인식 마크의 상대적인 형상을 나타내는 도면이다.
도 9c는 원격 제어 장치를 이용한 로봇 청소기의 위치 정보 생성에 대하여 설명하기 위한 도면이다.
도 9d는 로봇 청소기의 자세를 감지하기 위한 도면이다.
도 10 내지 13은 본 발명의 일 실시예에 따른 로봇 청소기 시스템이 제공하는 로봇 청소기의 위치 기반 서비스를 설명하기 위한 도면이다.
도 10a는 디스플레이부에 대한 터치 입력을 통한 로봇 청소기의 청소 영역 설정 방법에 대하여 설명하기 위한 도면이다.
도 10b는 로봇 청소기가 설정된 청소 영역안에서 청소를 수행하는 상태를 설명하기 위한 도면이다.
도 11은 디스플레이부에 대한 터치 입력을 통한 로봇 청소기의 이동 경로 설정 방법에 대하여 설명하기 위한 도면이다.
도 12는 디스플레이부에 대한 터치 입력을 통한 로봇 청소기의 청소 금지 영역 설정 방법에 대하여 설명하기 위한 도면이다.
도 13은 로봇 청소기를 사용자의 위치로 호출하는 방법을 설명하기 위한 도면이다.
도 14는 본 발명의 일 실시예에 따른 로봇 청소기 시스템 제어방법의 기본적인 구성을 설명하기 위한 흐름도이다.
도 15는 본 발명의 일 실시예에 따른 로봇 청소기 시스템 제어방법에 있어서 로봇 청소기를 감지하는 단계를 설명하기 위한 흐름도이다.
도 16은 본 발명의 일 실시예에 따른 로봇 청소기 시스템 제어방법에 있어서, 위치 기반 서비스를 제공하는 단계를 설명하기 위한 흐름도이다.
도 17은 본 발명의 또 다른 일 실시예에 따른 로봇 청소기 시스템의 제어방법에 있어서 로봇 청소기를 감지하는 단계를 설명하기 위한 흐름도이다.
도 18은 본 발명의 일 실시예에 따른 로봇 청소기 시스템에 포함될 수 있는 충전대의 일례를 도시한 사시도이다.
도 19는 본 발명의 일 실시예에 따른 로봇 청소기의 인식 수단의 일례로 조명 이미지를 나타내는 개념도이다.
도 20은 도 19에 도시된 조명 이미지의 활성화 전과 활성화 후를 비교한 도면이다.
도 21은 인식 수단의 일 형태들을 도시한 도면이다.
도 22는 원격 제어 장치에서 어플리케이션을 실행한 초기 화면이다.
이하 상기의 목적을 구체적으로 실현할 수 있는 본 발명의 바람직한 실시예를 첨부된 도면을 참조하여 설명한다.
이 과정에서 도면에 도시된 구성요소의 크기나 형상 등은 설명의 명료성과 편의상 과장되게 도시될 수 있다. 또한, 본 발명의 구성 및 작용을 고려하여 특별히 정의된 용어들은 사용자, 운용자의 의도 또는 관례에 따라 달라질 수 있다. 이러한 용어들에 대한 정의는 본 명세서 전반에 걸친 내용을 토대로 내려져야 한다.
본 발명의 일 실시예에 따른 로봇 청소기 시스템은, 자동으로 주행하면서 청소를 수행하는 로봇 청소기(100) 그리고 상기 로봇 청소기(100)를 원격으로 제어하는 원격 제어 장치(200)를 포함하여 이루어질 수 있다.
상기 원격 제어 장치(200)는 로봇 청소기(100) 및 로봇 청소기(100)의 주변 영역에 대한 영상 정보를 생성하는 카메라(221')를 갖는 것이 바람직하다. 원격 제어 장치(200)는 영상 정보를 기초로 로봇 청소기(100)의 위치 정보를 생성할 수 있다. 즉, 이러한 영상 정보를 기초로 하여 원격 제어 장치 상에 나타나는 영역과 실제 청소 영역을 매핑할 수 있다. 이하 상기의 목적을 구체적으로 실현할 수 있는 본 발명의 일 실시예에 따른 로봇 청소시 시스템을 첨부한 도면을 참조하여 설명한다.
먼저, 도 1 내지 3을 참조하여, 로봇 청소기 시스템을 구성하는 로봇 청소기의 구성을 일예를 들어 설명한다.
도 1은 본 발명의 일 실시예에 따른 로봇 청소기를 나타내는 사시도, 도 2는 본 발명의 일 실시예에 따른 로봇 청소기의 내부 구성을 나타내는 사시도, 도 3은 본 발명의 일 실시예에 따른 로봇 청소기의 하부 사시도이며, 도 4는 본 발명의 일 실시예에 따른 로봇 청소기 시스템을 구성하는 로봇 청소기의 블록 구성도이다.
로봇 청소기(100)는, 외관을 형성하는 청소기 본체(110), 청소기 본체(110) 내부에 제공되는 흡입장치(120), 흡입장치(120)의 구동에 의해 바닥의 먼지를 흡입하는 흡입 노즐(130), 그리고 흡입 노즐(130)에서 흡입된 공기 중의 이물질을 집진하는 집진장치(140)를 포함하여 이루어질 수 있다.
여기서, 로봇 청소기(100)의 청소기 본체(110)는 지름에 비해 상대적으로 높이가 낮은 원통형 즉, 납작한 원통 형상일 수 있으며 모서리가 둥근 사각 형상일 수 있다. 그리고, 청소기 본체(110)의 내부에는 흡입장치(120), 흡입 노즐(130), 그리고 흡입 노즐(130)과 연통하는 집진장치(140)가 구비될 수 있다.
또한, 청소기 본체(110)의 외주면에는 실내의 벽이나 장애물과의 거리를 감지하는 센서(미도시), 충돌시 충격을 완충하는 범퍼(미도시), 그리고 로봇 청소기(100)의 이동을 위한 바퀴(150)가 구비될 수 있다.
바퀴(150)는 청소기 본체(110)의 양측 하부에 각각 설치되는 좌, 우측 구동 바퀴(152, 154)가 구비될 수 있다. 좌, 우측 구동 바퀴(152,154)는 각각, 청소기 제어부(160)에 의해 제어되는 좌륜모터(152a)와 우륜모터(154a)에 의해 회전하도록 구성되어, 좌륜모터(152a)와 우륜모터(154a)의 구동에 따라 로봇 청소기(100)가 스스로 방향 전환을 하면서 실내의 청소를 수행할 수 있다.
그리고, 청소기 본체(110)의 바닥에는 적어도 하나의 보조 바퀴(156)가 구비되어, 로봇 청소기(100)와 바닥 사이의 마찰을 최소화하는 동시에 로봇 청소기(100)의 움직임을 안내할 수 있다.
한편, 청소기 본체(110)에는 인식 수단이 구비될 수 있다. 이러한 인식 수단은 후술하는 바와 같이 청소기가 위치하는 실제 영역과 가상 영역을 매핑하도록 구비될 수 있다. 아울러, 상기 인식 수단은 다양한 형태와 다양한 형상을 가질 수 있으며, 청소기 본체 내부에 구비되거나 청소기 본체 외부에 구비될 수 있다. 즉, 어느 경우나 청소기 외부에서 상기 인식 수단을 카메라 등을 통해서 인식할 수 있도록 마련됨이 바람직하다.
도 1에는 인식 수단의 일례로서 인식 마크(112)가 도시되어 있다. 인식 마크(112)는 도시된 바와 같이 청소기 본체(110)의 상면에 표시될 수 있으며, 다양한 문양 또는 패턴을 가질 수 있다. 아울러, 인식 마크(112)의 위치는 다양하게 변형될 수 있으며 개수 또한 다양하게 변형될 수 있다. 이러한 인식 수단을 통해서, 외부 장치에서 로봇 청소기(100)가 위치하는 실제 영역과 가상 영역을 매핑할 수 있다. 예를 들어, 로봇 청소기(100)가 위치하는 실제 영역과 외부 장치에서 표시되는 가상 영역을 매핑할 수 있다. 이에 대한 보다 상세한 내용은 후술하기로 한다.
도 4는 상기 로봇 청소기(100)의 제어부(160)를 기준으로 하는 블럭도이다. 청소기 본체(110)의 내부, 일례로 전방부에는 로봇 청소기(100)의 각종 부품과 접속되어 로봇 청소기(100)의 구동을 제어하는 청소기 제어부(160)가 구비될 수 있다. 그리고, 청소기 본체(110)의 내부, 일례로 상기 청소기 제어부(160)의 후방에는 흡입장치(120) 등에 전원을 공급하는 배터리(170)가 구비될 수 있다.
상기 배터리(170)의 후방에는 공기 흡입력을 발생시키는 흡입장치(120)가 구비될 수 있고, 흡입장치(120)의 후방에 구비되는 집진장치 장착부(140a)에서 집진장치(140)가 후방에서 착탈되도록 장착될 수 있다.
그리고, 집진장치(140)의 하측에는 흡입 노즐(130)이 구비되어, 바닥의 이물질을 공기와 함께 흡입하게 된다. 여기서, 흡입장치(120)는, 배터리(170)와 집진장치(140) 사이에 경사지게 설치되며, 배터리(170)에 전기적으로 연결되는 모터(미도시)와 모터의 회전축에 연결되어 공기의 유동을 강제하는 팬(미도시)을 포함하여 구성됨이 바람직하다.
한편, 흡입 노즐(130)은, 청소기 본체(110)의 바닥에 형성된 개구부(미도시)를 통해 청소기 본체(110)의 하측으로 노출됨으로써, 실내의 바닥에 접하게 된다.
외부에서 로봇 청소기(100)를 제어하기 위하여, 본 실시예에 따른 로봇 청소기(100)는 외부 장치와 무선 통신이 가능한 제1 무선 통신부(180)를 포함함이 바람직하다.
제1 무선 통신부(180)는 로봇 청소기(100)를 외부 장치 또는 외부 네트워크와 무선 통신을 가능하게 하는 하나 이상의 모듈을 포함할 수 있다. 예를 들어, 제1 무선 통신부(180)는 무선 인터넷 모듈, 근거리 통신 모듈 등을 포함할 수 있다.
무선 인터넷 모듈은 무선 인터넷 접속을 위한 모듈을 말하는 것으로, 로봇 청소기(100)에 내장되거나 외장될 수 있다. 여기서, 무선 인터넷 기술로는 WLAN(Wireless LAN)(Wi-Fi), Wibro(Wireless broadband), Wimax(World Interoperability for Microwave Access), HSDPA(High Speed Downlink Packet Access) 등이 이용될 수 있다.
근거리 통신 모듈은 근거리 통신을 위한 모듈을 말한다. 여기서, 근거리 통신(short range communication) 기술로 블루투스(Bluetooth), RFID(Radio Frequency Identification), 적외선 통신(IrDA, infrared Data Association), UWB(Ultra Wideband), ZigBee 등이 이용될 수 있다.
다음으로, 도 5 내지 7을 참조하여, 로봇 청소기 시스템을 구성하는 원격 제어 장치(200)의 일실시예를 설명한다.
도 5는 본 발명의 일 실시예에 따른 로봇 청소기 시스템을 구성하는 원격 장치 장치의 블록 구성도이다.
본 발명에서 원격 제어 장치(200)는 로봇 청소기(100)와 원격으로 접속되어 로봇 청소기(100)의 구동을 제어하는 장치로서, 예를 들어 휴대폰, 스마트 폰(smart phone), PDA(Personal Digital Assistants), PMP(Portable Multimedia Player) 등이 원격 제어 장치(200)로서 사용될 수 있다.
이하에서는, 설명의 편의를 위하여 로봇 청소기(100)의 원격 제어 장치(200)로서 스마트 폰이 이용되는 것을 기준으로 설명하기로 한다.
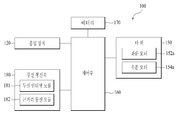
원격 제어 장치(200)는 무선 통신부(210), A/V(Audio/Video) 입력부(220), 사용자 입력부(230), 출력부(240), 메모리(250), 인터페이스부(260), 단말기 제어부(270) 및 전원 공급부(280) 등을 포함할 수 있다. 도 5에 도시된 구성요소들이 필수적인 것은 아니어서, 그보다 많은 구성요소들을 갖거나 그보다 적은 구성요소들을 갖는 원격 제어 장치(200)가 구현될 수도 있다.
이하, 상기 구성요소들에 대해 차례로 살펴본다.
제2 무선 통신부(210)는 원격 제어 장치(200)와 무선 통신 시스템 사이 또는 원격 제어 장치(200)와 원격 제어 장치(200)가 위치한 네트워크 사이의 무선 통신을 가능하게 하는 하나 이상의 모듈을 포함할 수 있다. 예를 들어, 제2 무선 통신부(210)는 이동통신 모듈(211), 무선 인터넷 모듈(212) 및 근거리 통신 모듈(213) 등을 포함할 수 있다.
이동통신 모듈(211)은, 이동 통신망 상에서 기지국, 외부의 단말, 서버 중 적어도 하나와 무선 신호를 송수신한다. 무선 신호는, 음성 호 신호, 화상 통화 호 신호 또는 문자/멀티미디어 메시지 송수신에 따른 다양한 형태의 데이터를 포함할 수 있다.
무선 인터넷 모듈(212)은 무선 인터넷 접속을 위한 모듈을 말하는 것으로, 원격 제어 장치(200)에 내장되거나 외장될 수 있다. 무선 인터넷 기술로는 WLAN(Wireless LAN)(Wi-Fi), Wibro(Wireless broadband), Wimax(World Interoperability for Microwave Access), HSDPA(High Speed Downlink Packet Access) 등이 이용될 수 있다.
근거리 통신 모듈(213)은 근거리 통신을 위한 모듈을 말한다. 근거리 통신(short range communication) 기술로 블루투스(Bluetooth), RFID(Radio Frequency Identification), 적외선 통신(IrDA, infrared Data Association), UWB(Ultra Wideband), ZigBee 등이 이용될 수 있다.
도 5를 참조하면, A/V(Audio/Video) 입력부(220)는 오디오 신호 또는 비디오 신호 입력을 위한 것으로, 이에는 카메라(221)와 마이크(222) 등이 포함될 수 있다. 카메라(221)는 화상 통화모드 또는 촬영 모드에서 이미지 센서에 의해 얻어지는 정지영상 또는 동영상 등의 화상 프레임을 처리한다. 처리된 화상 프레임은 디스플레이부(241)에 표시될 수 있다.
카메라(221)에서 처리된 화상 프레임은 메모리(250)에 저장되거나 제2 무선 통신부(210)를 통하여 외부로 전송될 수 있다. 카메라(221)는 사용 환경에 따라 2개 이상이 구비될 수도 있다.
마이크(222)는 통화모드 또는 녹음모드, 음성인식 모드 등에서 마이크로폰(Microphone)에 의해 외부의 음향 신호를 입력받아 전기적인 음성 데이터로 처리한다. 처리된 음성 데이터는 통화 모드인 경우 이동통신 모듈(211)을 통하여 이동통신 기지국으로 송신 가능한 형태로 변환되어 출력될 수 있다. 마이크(222)에는 외부의 음향 신호를 입력받는 과정에서 발생되는 잡음(noise)을 제거하기 위한 다양한 잡음 제거 알고리즘이 구현될 수 있다.
사용자 입력부(230)는 사용자가 원격 제어 장치(200)의 동작 제어를 위한 입력 데이터를 발생시킨다. 사용자 입력부(230)는 키 패드(key pad) 돔 스위치 (dome switch), 터치 패드(정압/정전), 조그 휠, 조그 스위치 등으로 구성될 수 있다.
출력부(240)는 시각, 청각 또는 촉각 등과 관련된 출력을 발생시키기 위한 것으로, 이에는 디스플레이부(241), 음향 출력 모듈(242), 알람부(243), 및 햅틱 모듈(244) 등이 포함될 수 있다.
디스플레이부(241)는 원격 제어 장치(200)에서 처리되는 정보를 표시(출력)한다. 예를 들어, 원격 제어 장치(200)가 통화 모드인 경우 통화와 관련된 UI(User Interface) 또는 GUI(Graphic User Interface)를 표시한다. 원격 제어 장치(200)가 화상 통화 모드 또는 촬영 모드인 경우에는 촬영 또는/및 수신된 영상 또는 UI, GUI를 표시한다.
디스플레이부(241)는 액정 디스플레이(liquid crystal display, LCD), 박막 트랜지스터 액정 디스플레이(thin film transistor-liquid crystal display, TFT LCD), 유기 발광 다이오드(organic light-emitting diode, OLED), 플렉시블 디스플레이(flexible display), 3차원 디스플레이(3D display) 중에서 적어도 하나를 포함할 수 있다.
원격 제어 장치(200)의 구현 형태에 따라 디스플레이부(241)이 2개 이상 존재할 수 있다. 예를 들어, 원격 제어 장치(200)에는 복수의 디스플레이부(241)들이 하나의 면에 이격되거나 일체로 배치될 수 있고, 또한 서로 다른 면에 각각 배치될 수도 있다.
디스플레이부(241)와 터치 동작을 감지하는 센서(이하, '터치 센서'라 함)가 상호 레이어 구조를 이루는 경우(이하, '터치 스크린'이라 함)에, 디스플레이부(241)는 출력 장치 이외에 입력 장치로도 사용될 수 있다. 터치 센서는, 예를 들어, 터치 필름, 터치 시트, 터치 패드 등의 형태를 가질 수 있다.
터치 센서는 디스플레이부(241)의 특정 부위에 가해진 압력 또는 디스플레이부(241)의 특정 부위에 발생하는 정전 용량 등의 변화를 전기적인 입력신호로 변환하도록 구성될 수 있다. 터치 센서는 터치 되는 위치 및 면적뿐만 아니라, 터치 시의 압력까지도 검출할 수 있도록 구성될 수 있다.
터치 센서에 대한 터치 입력이 있는 경우, 그에 대응하는 신호(들)는 터치 제어기로 보내진다. 터치 제어기는 그 신호(들)를 처리한 다음 대응하는 데이터를 단말기 제어부(270)로 전송한다. 이로써, 단말기 제어부(270)는 디스플레이부(241)의 어느 영역이 터치 되었는지 여부 등을 알 수 있게 된다.
음향 출력 모듈(242)은 호신호 수신, 통화모드 또는 녹음 모드, 음성인식 모드, 방송수신 모드 등에서 제2 무선 통신부(210)로부터 수신되거나 메모리(250)에 저장된 오디오 데이터를 출력할 수 있다. 음향 출력 모듈(242)은 원격 제어 장치(200)에서 수행되는 기능(예를 들어, 호신호 수신음, 메시지 수신음 등)과 관련된 음향 신호를 출력하기도 한다. 이러한 음향 출력 모듈(242)에는 리시버(Receiver), 스피커(speaker), 버저(Buzzer) 등이 포함될 수 있다.
알람부(243)는 원격 제어 장치(200)의 이벤트 발생을 알리기 위한 신호를 출력한다. 원격 제어 장치(200)에서 발생 되는 이벤트의 예로는 호 신호 수신, 메시지 수신, 키 신호 입력, 터치 입력 등이 있다. 알람부(243)는 비디오 신호나 오디오 신호 이외에 다른 형태, 예를 들어 진동으로 이벤트 발생을 알리기 위한 신호를 출력할 수도 있다. 비디오 신호나 오디오 신호는 디스플레이부(241)나 음성 출력 모듈(242)을 통해서도 출력될 수 있어서, 그들(241,242)은 알람부(243)의 일부로 분류될 수도 있다.
햅틱 모듈(haptic module)(154)은 사용자가 느낄 수 있는 다양한 촉각 효과를 발생시킨다. 햅틱 모듈(244)이 발생시키는 촉각 효과의 대표적인 예로는 진동이 있다. 햅틱 모듈(244)이 발생하는 진동의 세기와 패턴 등은 제어가능하다. 예를 들어, 서로 다른 진동을 합성하여 출력하거나 순차적으로 출력할 수도 있다.
메모리(250)는 단말기 제어부(270)의 동작을 위한 프로그램을 저장할 수 있고, 입/출력되는 데이터들(예를 들어, 폰북, 메시지, 정지영상, 동영상 등)을 임시 저장할 수도 있다. 메모리(250)는 터치스크린 상의 터치 입력시 출력되는 다양한 패턴의 진동 및 음향에 관한 데이터를 저장할 수 있다.
메모리(250)는 플래시 메모리 타입(flash memory type), 하드디스크 타입(hard disk type), 멀티미디어 카드 마이크로 타입(multimedia card micro type), 카드 타입의 메모리(예를 들어 SD 또는 XD 메모리 등), 램(Random Access Memory, RAM), SRAM(Static Random Access Memory), 롬(Read-Only Memory, ROM), EEPROM(Electrically Erasable Programmable Read-Only Memory), PROM(Programmable Read-Only Memory), 자기 메모리, 자기 디스크, 광디스크 중 적어도 하나의 타입의 저장매체를 포함할 수 있다. 원격 제어 장치(200)는 인터넷(internet)상에서 메모리(250)의 저장 기능을 수행하는 웹 스토리지(web storage)와 관련되어 동작할 수도 있다.
인터페이스부(260)는 원격 제어 장치(200)에 연결되는 모든 외부기기와의 통로 역할을 한다. 인터페이스부(260)는 외부 기기로부터 데이터를 전송받거나, 전원을 공급받아 원격 제어 장치(200) 내부의 각 구성 요소에 전달하거나, 원격 제어 장치(200) 내부의 데이터가 외부 기기로 전송되도록 한다. 예를 들어, 유/무선 헤드셋 포트, 외부 충전기 포트, 유/무선 데이터 포트, 메모리 카드(memory card) 포트, 식별 모듈이 구비된 장치를 연결하는 포트, 오디오 I/O(Input/Output) 포트, 비디오 I/O(Input/Output) 포트, 이어폰 포트 등이 인터페이스부(260)에 포함될 수 있다.
식별 모듈은 원격 제어 장치(200)의 사용 권한을 인증하기 위한 각종 정보를 저장한 칩으로서, 사용자 인증 모듈(User Identify Module, UIM), 가입자 인증 모듈(Subscriber Identify Module, SIM), 범용 사용자 인증 모듈(Universal Subscriber Identity Module, USIM) 등을 포함할 수 있다. 식별 모듈이 구비된 장치(이하 '식별 장치')는, 스마트 카드(smart card) 형식으로 제작될 수 있다. 따라서 식별 장치는 포트를 통하여 원격 제어 장치(200)와 연결될 수 있다.
단말기 제어부(controller, 270)는 통상적으로 원격 제어 장치(200)의 전반적인 동작을 제어한다. 예를 들어 음성 통화, 데이터 통신, 화상 통화 등을 위한 관련된 제어 및 처리를 수행한다. 단말기 제어부(270)는 멀티 미디어 재생을 위한 멀티미디어 모듈(271)을 구비할 수도 있다. 멀티미디어 모듈(271)은 단말기 제어부(270) 내에 구현될 수도 있고, 단말기 제어부(270)와 별도로 구현될 수도 있다.
상기 단말기 제어부(270)는 터치스크린 상에서 행해지는 필기 입력 또는 그림 그리기 입력을 각각 문자 및 이미지로 인식할 수 있는 패턴 인식 처리를 행할 수 있다.
전원 공급부(280)는 제어부(270)의 제어에 의해 외부의 전원, 내부의 전원을 인가받아 각 구성요소들의 동작에 필요한 전원을 공급한다.
본 발명의 일 실시예는 예를 들어, 소프트웨어, 하드웨어 또는 이들의 조합된 것을 이용하여 컴퓨터 또는 이와 유사한 장치로 읽을 수 있는 기록매체 내에서 구현될 수 있다.
하드웨어적인 구현에 의하면, 여기에 설명되는 실시예는 ASICs (application specific integrated circuits), DSPs (digital signal processors), DSPDs (digital signal processing devices), PLDs (programmable logic devices), FPGAs (field programmable gate arrays, 프로세서(processors), 제어기(controllers), 마이크로 컨트롤러(micro-controllers), 마이크로 프로세서(microprocessors), 기타 기능 수행을 위한 전기적인 유닛 중 적어도 하나를 이용하여 구현될 수 있다. 일부의 경우에 그러한 실시예들이 단말기 제어부(270)에 의해 구현될 수 있다.
소프트웨어적인 구현에 의하면, 절차나 기능과 같은 실시예들은 적어도 하나의 기능 또는 작동을 수행하게 하는 별개의 소프트웨어 모듈과 함께 구현될 수 있다. 소프트웨어 코드는 적절한 프로그램 언어로 쓰여진 소프트웨어 어플리케이션에 의해 구현될 수 있다. 소프트웨어 코드는 메모리(250)에 저장되고, 단말기 제어부(270)에 의해 실행될 수 있다.
도 6은 본 발명의 일 실시예에 따른 로봇 청소시 시스템을 구성하는 원격 제어 장치를 전면에서 바라본 사시도이다.
개시된 원격 제어 장치(200)는 바 형태의 바디를 구비하고 있다. 다만, 본 발명은 여기에 한정되지 않고, 2 이상의 바디들이 상대 이동 가능하게 결합되는 슬라이드 타입, 폴더 타입, 스윙 타입, 스위블 타입 등 다양한 구조에 적용이 가능하다.
바디는 외관을 이루는 케이스(케이싱, 하우징, 커버 등)를 포함한다. 본 실시예에서, 케이스는 프론트 케이스(201)와 리어 케이스(202)로 구분될 수 있다. 프론트 케이스(201)와 리어 케이스(202)의 사이에 형성된 공간에는 각종 전자부품들이 내장된다. 프론트 케이스(201)와 리어 케이스(202) 사이에는 적어도 하나의 중간 케이스가 추가로 배치될 수도 있다.
케이스들은 합성수지를 사출하여 형성되거나 금속 재질, 예를 들어 스테인레스 스틸(STS) 또는 티타늄(Ti) 등과 같은 금속 재질을 갖도록 형성될 수도 있다.
원격 제어 장치(200)의 바디, 주로 프론트 케이스(201)에는 디스플레이부(241), 음향출력부(242), 카메라(221), 입력부(230/231,232), 마이크(222), 인터페이스(160) 등이 배치될 수 있다.
디스플레이부(241)는 프론트 케이스(201)의 주면의 대부분을 차지한다. 디스플레이부(241)의 양단부 중 일 단부에 인접한 영역에는 음향출력부(151)와 카메라(221)가 배치되고, 다른 단부에 인접한 영역에는 입력부(231)와 마이크(222)가 배치된다. 입력부(232)와 인터페이스(160) 등은 프론트 케이스(201) 및 리어 케이스(202)의 측면들에 배치될 수 있다.
사용자 입력부(230)는 원격 제어 장치(200)의 동작을 제어하기 위한 명령을 입력받기 위해 조작되는 것으로서, 복수의 조작 유닛들(231,232)을 포함할 수 있다. 조작 유닛들(231,232)은 조작부(manipulating portion)로도 통칭 될 수 있으며, 사용자가 촉각 적인 느낌을 가면서 조작하게 되는 방식(tactile manner)이라면 어떤 방식이든 채용될 수 있다.
제1 또는 제2조작 유닛들(231, 232)에 의하여 입력되는 내용은 다양하게 설정될 수 있다. 예를 들어, 제1 조작 유닛(231)은 시작, 종료, 스크롤 등과 같은 명령을 입력받고, 제2 조작 유닛(232)은 음향출력부(242)에서 출력되는 음향의 크기 조절 또는 디스플레이부(241)의 터치 인식 모드로의 전환 등과 같은 명령을 입력받을 수 있다.
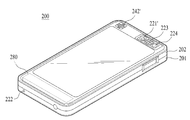
도 7은 본 발명의 일 실시예에 따른 로봇 청소기 시스템을 구성하는 원격 제어 장치를 후면 사시도이다.
도 7을 참조하면, 원격 제어 장치(200) 바디의 후면, 다시 말해서 리어 케이스(202)에는 카메라(221')가 추가로 장착될 수 있다. 카메라(221')는 카메라(221, 도 6 참조)와 실질적으로 반대되는 촬영 방향을 가지며, 카메라(221)와 서로 다른 화소를 가지는 카메라일 수 있다.
예를 들어, 카메라(221)는 화상 통화 등의 경우에 사용자의 얼굴을 촬영하여 상대방에 전송함에 무리가 없도록 저 화소를 가지며, 카메라(221')는 일반적인 피사체를 촬영하고 바로 전송하지는 않는 경우가 많기에 고 화소를 가지는 것이 바람직하다. 카메라(221,221')는 회전 또는 팝업(pop-up) 가능하게 원격 제어 장치(200)의 바디에 설치될 수도 있다.
카메라(221')에 인접하게는 플래쉬(123)와 거울(124)이 추가로 배치된다. 플래쉬(123)는 카메라(221')로 피사체를 촬영하는 경우에 피사체를 향해 빛을 비추게 된다. 거울(124)은 사용자가 카메라(221')를 이용하여 자신을 촬영(셀프 촬영)하고자 하는 경우에, 사용자 자신의 얼굴 등을 비춰볼 수 있게 한다.
원격 제어 장치(200) 바디의 후면에는 음향 출력부(242')가 추가로 배치될 수도 있다. 음향 출력부(242')는 음향 출력부(242, 도 6 참조)와 함께 스테레오 기능을 구현할 수 있으며, 통화시 스피커폰 모드의 구현을 위하여 사용될 수도 있다.
원격 제어 장치(200) 바디에는 원격 제어 장치(200)에 전원을 공급하기 위한 전원공급부(280)가 장착된다. 전원공급부(280)는 원격 제어 장치(200) 바디에 내장되거나, 원격 제어 장치(200) 바디의 외부에서 직접 탈착될 수 있게 구성될 수 있다.
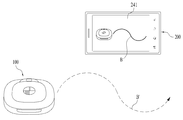
도 8은 본 발명의 일 실시예에 따른 로봇 청소기 시스템에 있어서, 로봇 청소기(100)의 영상 정보를 생성하는 방법을 설명하기 위한 도면이며, 도 9는 본 발명의 일 실시예에 따른 로봇 청소기 시스템에 있어서, 로봇 청소기의 위치 정보를 생성하는 방법을 설명하기 위한 도면이다. 이하에서는 도 8 및 9를 참조하여, 원격 제어 장치를 이용하여 로봇 청소기(100)의 영상 정보 및 위치 정보를 생성하는 방법을 설명하기로 한다.
상술한 바와 같이 본 발명의 일 실시예에 따른 로봇 청소기 시스템은 로봇 청소기(100)의 구동을 원격으로 제어하기 위한 원격 제어 장치(200)를 포함하고 있다. 그런데, 원격 제어 장치(200)가 로봇 청소기(100)의 구동을 제어하기 위해서는 로봇 청소기(100)의 정확한 위치 정보를 필요로 한다. 구체적으로는 실제 영역과 가상 영역 사이의 매핑이 필요하게 된다.
이를 해결하기 위하여, 본 발명의 일 실시예에 따른 로봇 청소기 시스템에서는 원격 제어 장치(200)의 카메라(221')를 이용하여 생성한 영상 정보를 기초로 로봇 청소기(100)를 감지하여 로봇 청소기(100)의 위치 정보를 생성할 수 있다.
먼저, 원격 제어 장치(200) 바디의 후면에 마련된 카메라(221')로 도 8에 도시된 바와 같이 로봇 청소기(100) 및 로봇 청소기(100)의 주변 영역을 촬영하여 영상 정보를 생성한다. 이와 같이 생성된 로봇 청소기(100)의 영상 정보는 단말기 제어부(270)로 전달된다.
다음으로, 원격 제어 장치(200)는 상기 영상 정보를 기초로 로봇 청소기(100)가 위치되는 실제 영역과 영상 정보로 나타나는 가상 영역을 매핑하게 된다. 이를 원격 제어 장치(200)에서 로봇 청소기(100)를 감지하는 것이라 할 수 있다.
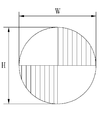
상술한 바와 같이 로봇 청소기(100)의 상면에는 외부 장치를 이용하여 로봇 청소기(100)를 감지할 수 있도록 마련된 인식 마크(112)가 구비될 수 있다.(도 1 참조). 여기서 상기 인식 마크(112)의 형상은 특별히 한정되지는 않는다. 예를 들어, 인식 마크(112)는 도 9a에 도시된 바와 같이 원형으로 형성될 수 있으며, 이 경우에는 인식 마크(112)의 폭(W)과 높이(H)는 서로 동일한 값을 가진다.
상기 원격 제어 장치(200)의 메모리(250)에는 인식 마크(112)의 실제 형상이 저장되어 있다. 즉, 상기 인식 마크(112) 실제 사이즈 등을 포함하는 정보가 저장되어 있다. 상기 단말기 제어부(270)는 상기 영상 정보의 이미지상에서 인식 마크(112)를 추출하고, 추출된 인식 마크(112)가 유효한 인식 마크(112)인지 판단하는 방법으로 로봇 청소기(100)를 감지할 수 있다.
여기서, 단말기 제어부(270)는 영상 정보 이미지상에서 인식 마크(112)를 추출하기 위하여, 예를 들어 인식 마크(112)의 형상이나 패턴 또는 인식 마크(112)의 특정 컬러를 확인할 수 있다.
그런데, 영상 정보의 이미지의 화질이 나쁜 경우에는, 단말기 제어부(270)가 인식 마크(112)를 감지하기가 어렵다. 따라서, 단말기 제어부(270)는 영상 정보의 이미지로부터 인식 마크(112)를 추출하기 이전에 영상 정보의 이미지의 화질을 개선할 수 있다.
여기서, 단말기 제어부(270)는 영상 정보의 이미지의 화질을 개선하기 위하여, 예를 들어 이미지 밝기 조정, 노이즈 제거, 컬러 보정 등을 할 수 있다.
다음으로, 원격 제어 장치(200)는 인식 마크(112)의 실제 형상 정보와 영상 정보에 의해 파악되는 상대적인 형상을 비교하여 로봇 청소기(100)의 위치 정보를 생성할 수 있다. 즉, 실제 영역과 가상 영역의 매핑이 수행될 수 있다.
사용자가 원격 제어 장치(200)의 카메라(221')를 이용하여 로봇 청소기(100) 및 그 주변영역을 촬영할 때에는, 사용자는 원격 제어 장치(200)를 소정의 높이로 들어올린 상태에서 촬영을 하게 된다. 즉, 사용자는 로봇 청소기(100)를 비스듬히 내려다보는 상태에서 촬영을 하게 된다.
따라서, 도 9b에 도시된 바와 같이 사용자가 로봇 청소기(100)를 내려다보는 각도에 따라 영상 정보의 이미지상에서 로봇 청소기(100)의 인식 마크(112)는 그 폭에 비하여 그 높이가 작아지게 된다.
또한, 로봇 청소기(100)의 자세와 로봇 청소기(100)와 원격 제어 장치(200) 간의 거리와 따라, 영상 정보로부터 파악되는 인식 마크(112)의 상대적인 형태와 크기가 달라진다.
이와 같이, 로봇 청소기(100)의 위치와 자세에 대응하여 인식 마크(112)의 실제 형상과 영상 정보에 의해 파악되는 상대적인 형상이 서로 다르다. 따라서, 인식 마크(112)의 실제 형상과 영상 정보에 의해 파악되는 상대적인 형상을 비교하여 로봇 청소기(100)의 위치 및 자세를 파악할 수 있다. 아울러, 사용자와 로봇 청소기(100) 사이의 거리 및 촬영 각도를 파악할 수 있으며, 영상 정보에 나타나는 가상 영역과 실제 영역 사이의 축척을 파악할 수 있다.
이하에서는, 인식 마크(112)의 실제 형상과 영상 정보에 의해 파악되는 상대적인 형상을 비교하여 로봇 청소기(100)의 위치 및 자세를 인식하거나, 가상 영역과 실제 영역 사이의 매핑에 대한 구체적인 방법에 대하여 설명하기로 한다.
아래의 수학식들은 인식 마크(112)의 상대적인 형상으로부터 로봇 청소기(100)의 위치 및 자세를 인식하는데 사용될 수 있다.





도 9c는 카메라(221')에 의해 생성된 로봇 청소기(100) 및 그 주변 영역에 대한 영상 정보의 이미지의 일 예이다. 여기서, 이미지의 수평 사진해상도는 a [pixel] 이고, 수직 사진해상도 b [pixel] 이며, 카메라(221') 수평 화각은 c°이다. 이는, 영상 정보의 이미지가 a*b의 해상도와 수평방향의 시야각 c°를 가짐을 의미한다.
먼저, 수학식 1 및 수학식 2를 이용하여 로봇 청소기(100)와 원격 제어 장치(200)의 거리를 구할 수 있다.
인식 마크(112)의 수평 화각 v°는 수학식 1에 기재된 바와 같이 카메라(221')의 수평 화각 c°, 영상 정보 이미지상의 인식 마크(112)의 수직 길이 Δh [pixel]와, 영상 정보 이미지상의 인식 마크(112)의 수평 길이 Δw [pixel]을 통해 구할 수 있다.
이와 같이 구해진 인식 마크(112)의 수평 화각 v°를 수학식 2에 대입하여 도 9c에 도시된 바와 같이 로봇 청소기(100)와 원격 제어 장치(200) 간의 수평 방향의 거리(L)를 구할 수 있다.
다음으로, 수학식 3을 이용하여 도 9c에 도시된 바와 같이 원격 제어 장치(200)가 로봇 청소기(100)를 내려다보는 각도인 상향각 u°를 구할 수 있다.
다음으로, 수학식 4 및 5를 이용하여 로봇 청소기(100)의 자세를 나타내는 인식 마크(112)의 방위각을 구할 수 있다.
영상 정보 이미지상의 인식 마크(112)는 상향각 u°에 따라 원형이거나 그 폭(Δw)이 높이(Δh)보다 긴 타원 형상을 가진다. 이로 인해, 도 9d에 도시된 바와 같이 영상 정보 이미지상의 인식 마크(112)의 방위각 θ는 상향각 u°에 따라 실제 인식 마크(112)의 방위각 θ0 과 같거나 그 이하의 값을 가진다. 즉, 원격 제어 장치(200)의 상향각이 90°이면, θ=θ0이고, 상향각이 90°미만이면, θ<θ0이다.
따라서, 영상 정보의 이미지로부터 파악되는 상대적인 방위각 θ을 구하기 위한 수학식 4을 r(H/W ratio)을 적용하여 보정함으로써, 인식 마크(112)의 실제 방위각θ0에 대한 수학식 5을 유도할 수 있다. 그 결과, 인식 마크(112)의 실제 방위각θ0 구하여 로봇 청소기(100)가 현재 어떠한 자세를 취하고 있는지 알 수 있다.
이와 같이, 본 발명의 일 실시예에 따른 로봇 청소기(100) 시스템에서는 인식 마크(112)를 구비한 로봇 청소기(100)를 카메라(221')를 구비하는 원격 제어 장치(200)를 이용하여 감지하고, 이에 더불어 로봇 청소기(100)의 위치 및 자세 등을 나타내는 로봇 청소기(100)의 위치 정보를 생성할 수 있다.
한편, 로봇 청소기(100)는 평면상에서 주행하는 것으로 전제할 수 있다. 즉, 실제 청소 영역은 평면상으로 나타나며, 이러한 실제 청소 영역이 영상 정보를 통해 원격 제어 장치에 표시될 수 있다. 즉, 실제 청소 영역과는 축척이 다른 형태의 가상 영역으로 표시될 수 있다. 따라서, 전술한 수학식 등을 통해서 실제 청소 영역과 가상 영역을 매핑할 수 있다.
이러한, 로봇 청소기(100)의 위치 정보 원격 제어 장치(200)에 마련된 디스플레이부(241)를 통해 사용자에게 표시할 수 있으며, 로봇 청소기(100)의 위치 정보를 기초로 사용자에게 로봇 청소기(100)의 위치 기반 서비스를 제공할 수 있다. 즉, 가상 영역과 실제 영역의 매핑을 통하여 가상 영역을 통해서 다양한 형태의 위치 기반 서비스를 제공할 수 있게 된다. 이러한, 로봇 청소기(100)의 위치 기반 서비스에 대한 구체적인 내용은 후술하기로 한다.
한편, 본 발명의 또 다른 일 실시예에 따른 로봇 청소기 시스템에서는 원격 제어 장치(200)의 메모리에 인식 마크(112)가 아닌 로봇 청소기(100)의 형상 정보를 저장하여, 이를 이용하여 로봇 청소기(100)의 위치 정보를 생성할 수 있다.
즉, 로봇 청소기(100)의 실제 형상과 영상 정보에 의해 파악되는 상대적인 형상을 비교하여 로봇 청소기(100)의 위치 및 자세를 인식할 수 있다. 본 발명의 또 다른 일 실시예는 로봇 청소기(100)의 형상 정보를 이용하여 그 위치 및 자세를 파악한다는 점 이외에는 본 발명의 일 실시예의 경우와 동일한바, 중복되는 내용에 대한 설명은 생략하기로 한다.
도 10 내지 13은 본 발명의 일 실시예에 따른 로봇 청소기 시스템이 제공하는 로봇 청소기의 위치 기반 서비스를 설명하기 위한 도면이다. 이하에서는, 도 10 내지 13을 참조하여 로봇 청소기(100)의 위치 기반 서비스에 대한 설명한다.
상술한 바와 같이 원격 제어 장치(200)는 로봇 청소기(100) 및 그 주변 영역에 대한 영상 정보를 생성하고, 이러한 영상 정보를 기초로 로봇 청소기(100)를 감지하여 그 위치 정보를 생성할 수 있다.
또한, 디스플레이부(241)는 로봇 청소기(100)와 그 주변 영역에 대한 영상 정보를 출력하는데, 특히 단말기 제어부(270)는 로봇 청소기(100)의 위치 정보를 기초로 디스플레이부(241)의 화면상에서 로봇 청소기(100)를 선택 가능하게 특정한다. 이에 따라, 사용자는 디스플레이부(241)를 통해 로봇 청소기(100)의 현재 상태를 관찰하면서, 로봇 청소기(100)의 구동을 제어할 수 있다.
한편, 로봇 청소기(100)의 구동을 제어하기 위하여, 원격 제어 장치(200)는 로봇 청소기(100)의 제어 신호를 입력하는 입력부를 더 포함할 수 있는데, 마이크(222), 사용자 입력부(230) 및 터치 입력을 감지하는 터치 센서가 마련된 디스플레이부(241) 등이 입력부로서 기능할 수 있다.
원격 제어 장치(200)의 로봇 청소기(100)의 제어 신호가 입력되면 원격 제어 장치(200)의 제2 무선 통신부는 로봇 청소기(100)의 제1 무선 통신부(180)에 제어 신호를 전달함으로써, 청소기 제어부(160)에 의해 제어 신호에 따라 로봇 청소기(100)가 구동된다.
이하에서는, 원격 제어 장치(200)의 입력부를 통해 제공 가능한 로봇 청소기(100)의 위치 기반 서비스들을 도면을 참조하여 설명한다.
먼저. 디스플레이부(241)에 대한 터치 입력을 통해 제공한 가능한 로봇 청소기(100)의 위치 기반 서비스를 예를 들어 설명한다.
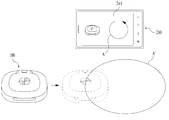
예를 들어, 터치 입력을 통해 로봇 청소기(100)의 청소 영역을 설정할 수 있다. 도 10a에 도시된 바와 같이, 디스플레이부(241)의 화면상에서 가상 영역(A)을 지정해 주면, 단말기 제어부(270)는 영역(A)와 대응되는 실내 공간의 실제 영역(A')을 청소 영역으로 지정한다. 이에 따라 도 10b에 도시된 바와 같이 로봇 청소기(100)가 청소 영역으로 이동하여 이에 대한 청소를 수행할 수 있다.
즉, 디스플레이부(241)에 나타나는 가상 영역을 실제 영역으로 매핑하여, 청소기에게 실제 이동 좌표를 전송할 수 있다.
예를 들어, 디스플레이부(241)에서 지정한 가상 영역(A)가 디스플레이부(241)의 청소기 중심에서 우측으로 5센치미터 떨어진 영역이라고 가정할 때, 실제 영역(A')는 실제 청소기 중심에서 우측으로 1미터 떨어진 영역으로 매핑될 수 있다. 물론, 이러한 매핑은 전술한 바와 같이 실제 인식 수단의 형상과 크기를 영상 정보를 통한 상대적인 인식 수단의 형상과 크기를 비교한 매핑 정보를 통해 수행될 수 있다. 따라서, 가상 영역을 실제 영역으로 매핑된 매핑 정보가 상기 청소기(100)로 전달되어, 상기 청소기는 이를 기반으로 하여 청소를 수행할 수 있게 된다.
즉, 본 발명의 일 실시예에서는 디스플레이부(241)에 출력되는 실내 공간의 영상(즉, 가상 영역)을 매개로 하여 터치 입력을 통해 간단히 청소 영역을 설정할 수 있다. 그 결과, 사용자가 원하는 영역에 대해서만 청소를 수행할 수 있어 청소 시간을 단축시키고 전기 사용량을 줄일 수 있다.
한편, 터치 입력을 통해 로봇 청소기(100)의 이동 경로를 설정할 수 있다. 도 11에 도시된 바와 같이 디스플레이부(241)의 화면상에서 경로(B)를 지정하면, 단말기 제어부(270)는 경로(B)와 대응되는 실내 공간상의 경로(B')를 로봇 청소기(100)의 이동 경로로 지정한다. 이에 따라 로봇 청소기(100)가 이동 경로를 따라 목적점까지 이동할 수 있다.
즉, 본 발명의 일 실시예에서는 디스플레이부(241)에 출력되는 실내 공간의 영상을 매개로 하여 터치 입력을 통해 로봇 청소기(100)의 이동 경로를 설정할 수 있다. 그 결과, 로봇 청소기(100)는 사용자가 정해준 루트를 따라 자동으로 이동하게 되는바, 사용자가 로봇 청소기의 진행 방향을 방향키 등을 이용하여 실시간으로 변경할 때 발생할 수 있는 딜레이 시간을 없앨 수 있다.
이에 더불어 로봇 청소기의 이동 경로를 곡선 및 직선을 섞어서 자유롭게 구성할 수 있어 정교한 조작이 가능하다.
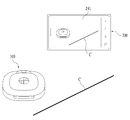
다른 한편, 터치 입력을 통해 로봇 청소기(100)의 청소 금지 영역을 설정할 수 있다. 도 12에 도시된 바와 같이 디스플레이부(241)의 화면상에서 금지선(C)을 지정해 주면, 단말기 제어부(270)는 금지선(C)과 대응되는 실내 공간상의 구획선(C') 바깥쪽 영역을 청소 금지 영역으로 설정한다. 이에 따라 로봇 청소기(100)는 구획선(C') 안쪽의 영역에 대해서만 청소를 수행할 수 있다.
즉, 본 발명의 일 실시예에서는 디스플레이부(241)에 출력되는 실내 공간의 영상을 매개로 하여, 실내 공간을 간단하게 구획하여 청소 금지 영역을 설정할 수 있다. 따라서, Magnet stripe, Virtual wall와 같은 별도의 부재를 사용하지 않아도 청소 금지 영역을 설정할 수 있어 매우 경제적이다.
이와 같이, 터치 입력을 통한 로봇 청소기(100)의 제어는 디스플레이부(241)에서 출력되는 로봇 청소기(100)와 그 주변영역에 대한 영상을 매개로 함으로써, 직관적이고 정교하게 로봇 청소기(100)의 구동을 제어할 수 있다.
한편, 터치 입력을 통해 제공되는 다양한 위치 기반 서비스들은 상술한 바와 같이 기 설정된 패턴의 터치 입력을 인가한 후에 디스플레이부(241)의 화면상에 표시된 당해 서비스의 아이콘(미도시)을 선택하여 수행될 수 있다. 예를 들어, 도 11에 도시된 바와 같이 주행 경로를 디스플레이부(241) 상에서 설정하고 아이콘을 터치하면, 주행 경로 정보와 주행 명령이 상기 원격 제어 장치(200)에서 로봇 청소기(100)로 전달될 수 있다. 물론, 마이크(222)를 통해 음성으로 서비스를 선택하거나 사용자 입력부(230)을 통해서 선택할 수도 있을 것이다.
다음으로 마이크(222)를 통한 음성 입력을 통해 제공 가능한 로봇 청소기(100)의 위치 기반 서비스를 예를 들어 설명한다.
예를 들어, 음성 입력을 통해 로봇 청소기(100)를 사용자의 위치로 호출할 수 있다. 도 13에 도시된 바와 같이 사용자가 원격 제어 장치(200)의 마이크(222)에 대하여 기설정된 맨트를 음성 입력하면 로봇 청소기(100)는 위치 정보를 기초로 원격 제어 장치(200)의 위치, 즉 사용자의 위치로 이동할 수 있다.
전술한 바와 같이, 실제 영역과 가상 영역의 매핑을 통해 디스플레이부를 통해 로봇 청소기의 무선 컨트롤이 가능함을 알 수 있다. 따라서, 일단 매핑이 수행되면 사용자가 실제 영역이나 로봇 청소기를 직접 주시할 필요가 없다. 즉, 매핑이 수행되면, 사용자는 다른 영역으로 이동하더라도 디스플레이부를 통해 로봇 청소기의 무선 컨트롤이 가능하게 된다. 물론, 이 경우 원격 제어 장치(200)와 로봇 청소기(100)의 무선 통신은 유지되어야 할 것이다.
일반적으로 로봇 청소기가 청소하는 영역은 고정될 수 있다. 이 경우, 원격 제어 장치(200)를 통한 로봇 청소기의 감지 또는 실제 영역과 가상 영역의 매핑은 지속적으로 유지될 수 있다. 즉, 한 번의 감지 또는 매핑을 그대로 이용하는 것이 가능하다. 따라서, 무선 컨트롤을 할 때마다 청소기를 촬영할 필요가 없을 수 있다. 즉, 종래의 촬영된 영상 정보를 저장하고 무선 컨트롤을 할 때마다 상기 영상 정보를 디스플레이부로 표시할 수 있다. 이후, 상기 디스플레이부에 표시된 가상 영역을 통해 반복적으로 무선 컨트롤을 할 수 있다. 이 경우, 로봇 청소기(100)와 원격 제어 장치(100) 사이의 무선 통신이 가능한 환경이라면, 사용자가 원격 제어 장치(100)를 갖고 외부에서도 로봇 청소기(100)의 무선 컨트롤을 할 수 있게 된다.
일례로, 가정 내의 와이파이 AP를 통해 로봇 청소기가 무선 통신 연결되고, 사용자의 원격 제어 장치(100)는 서버와 상기 와이파이 AP를 통해 상기 로봇 청소기와 무선 통신 연결될 수 있다. 따라서, 사용자는 외부에서 가정 내의 로봇 청소기를 무선 컨트롤할 수 있게 된다.
물론, 이러한 무선 컨트롤이 가능하기 위해서는 먼저 로봇 청소기(100)가 초기 위치로 이동해야 한다. 즉, 촬영이 수행될 때 로봇 청소기(100)의 위치로 이동함이 바람직하다. 따라서, 상기 로봇 청소기에는 초기 위치 정보(좌표 정보와 자세 정보 포함)가 저장됨이 바람직하고, 무선 컨트롤이 시작되면 상기 로봇 청소기는 초기 위치로 이동됨이 바람직할 것이다.
이러한 원격 제어 장치(200)를 통한 로봇 청소기(100)의 무선 컨트롤은 단순히 청소라는 청소기의 본래 기능 수행뿐만 아니라, 부가적으로 사용자에게 유희를 제공할 수 있다.
지금까지는, 본 발명의 일 양상에 따른 로봇 청소기(100) 시스템에 대하여 설명하였다. 이하에서는 도면을 참조하여 본 발명의 또 다른 일 양상에 따른 로봇 청소시 시스템 제어방법에 대하여 설명하기로 한다.
도 14는 본 발명의 일 실시예에 따른 로봇 청소기 시스템 제어방법의 기본적인 구성을 설명하기 위한 흐름도이며, 도 15는 본 발명의 일 실시예에 따른 로봇 청소기 시스템 제어방법에 있어서 로봇 청소기를 감지하는 단계를 설명하기 위한 흐름도이며, 도 16은 본 발명의 일 실시예에 따른 로봇 청소기 시스템 제어방법에 있어서, 위치 기반 서비스를 제공하는 단계를 설명하기 위한 흐름도이다.
여기서, 상술한 본 발명의 일 실시예에 따른 로봇 청소기 시스템과 중복되는 내용은 생략 또는 간략히 언급하며, 동일한 구성요소는 동일한 도면부호를 사용하기로 한다.
본 발명의 일 실시예에 따른 로봇 청소기 시스템의 제어 방법은 도 14에 도시된 바와 같이 개략적으로 로봇 청소기(100)와, 그리고 카메라(221') 및 디스플레이부(241)를 가지는 원격 제어 장치(200)를 포함하는 로봇 청소기 시스템에 있어서, 카메라(221')를 통해 로봇 청소기(100)와 그 주변 영역에 대한 영상 정보를 생성하는 단계, 그리고 영상 정보를 기초로 로봇 청소기(100)를 감지하는 단계를 포함할 수 있다. 아울러 로봇 청소기(100)의 위치 정보를 생성하는 단계를 포함할 수 있다. 즉, 생성된 영상 정보를 통해 실제 영역과 가상 영역을 매핑하는 단계가 수행될 수 있다.
한편, 영상 정보 및 위치 정보를 디스플레이부(241)에 출력하는 단계를 포함할 수 있으며, 이러한 단계는 영상 정보가 생성됨으로써 수행될 수 있다. 이후, 위치 정보를 기초로 위치 기반 서비스를 제공하는 단계가 수행될 수 있다.
이하에서는, 도 14 내지 16을 참조하여 본 발명의 일 실시예에 따른 로봇 청소기 시스템의 제어방법을 구체적으로 설명하기로 한다.
먼저, 원격 제어 장치(200)의 카메라(221')를 통해 로봇 청소기(100)와 그 주변 영역에 대한 영상 정보를 생성하는 단계가 수행될 수 있다(S100).
다음으로, 영상 정보를 기초로 로봇 청소기(100)를 감지하는 단계가 수행될 수 있다(S200). 여기서, 로봇 청소기(100)를 감지하는 단계는 로봇 청소기(100)의 인식 마크(112)를 감지하여 수행될 수 있다.
이에 따라 로봇 청소기(100)를 감지하는 단계(S200)는 도 15에 도시된 바와 같이 영상 정보의 이미지를 개선하는 단계 (S210), 로봇 청소기(100)의 인식 마크(112)를 감지하는 단계 (S220), 감지된 인식 마크(112)가 유효한 인식 마크(112)인지 판단하는 단계 (S230), 로봇 청소기(100)를 인식하는 단계 (S240)를 포함하여 이루어질 수 있다.
또한, 영상 정보의 이미지를 개선하는 단계(S120)는 원격 제어 장치(200)의 단말기 제어부(270)에 의하여 수행되는데, 보다 구체적으로 이미지의 밝기 조정, 노이즈 제거 및 컬러 보정 중 적어도 어느 하나를 포함하여 수행될 수 있다.
또한, 로봇 청소기(100)를 인식하는 단계(S240)는, 단말기 제어부(270)가 유효한 인식 마크(112)를 가지는 물체를 로봇 청소기(100)로서 인식함으로써 수행될 수 있다.
한편, 감지된 인식 마크(112)가 유효한 인식 마크(112)인지 판단하는 단계(S 230)에서, 만약 인식 마크(112)가 유효한 인식 마크(112)가 아니라면 다시 카메라(221')를 통해 로봇 청소기(100)와 그 주변 영역에 대한 영상 정보를 생성하는 단계가 수행될 수 있다(S260).
다음으로, 로봇 청소기(100)의 위치 정보를 생성하는 단계가 수행될 수 있다(S 300).
구체적으로, 로봇 청소기(100)의 위치 정보를 생성하는 단계(S300)는 인식 마크(112)의 실제 형상과 상기 영상 정보에 의하여 파악되는 상대적인 형상을 비교하여 수행될 수 있다. 여기서, 단말기 제어부(270)는 상기 영상 정보에 의하여 파악되는 인식 마크(112)의 수평 화각, H/W ratio, 상향각 및 방위각 등이 팩터 등을 기초로 로봇 청소기(100)의 위치 정보를 생성할 수 있다. 따라서, 이를 통해서, 실제 영역과 가상 영역을 매핑할 수 있게 된다.
다음으로, 로봇 청소기(100)의 영상 정보 및 위치 정보를 디스플레이부(241)에 출력하는 디스플레이부(241)에 출력하는 단계가 수행될 수 있다(S400). 즉, 촬영 후 디스플레이부(241) 화면이 전환되어 매핑하는 단계가 수행되고, 매핑 단계가 종료하면 촬영된 영상 정보 및 위치 정보를 디스플레이부(241)에서 출력할 수 있다. 물론, 촬영 완료 후 촬영된 화면이 지속적으로 디스플레이부(241)에서 출력되고, 매핑하는 단계가 수행되는 것도 가능하다. 따라서, 이 경우, 매핑이 종료되어야 디스플레이부(241)를 통한 무선 컨트롤이 가능하게 될 것이다.
여기서, 상기 영상 정보 및 위치 정보를 기초로 하여 단말기 제어부(270)는, 디스플레이부(241)의 화면상에서 로봇 청소기(100)를 선택 가능하게 표시할 수 있다.
다음으로, 위치 정보를 기초로 위치 기반 서비스를 제공하는 단계가 수행될 수 있다(S500).
여기서, 로봇 청소기(100)가 위치 기반 서비스를 제공하는 단계는, 원격 제어 장치(200)에서 로봇 청소기(100)의 제어 신호를 생성하는 단계, 로봇 청소기(100)에 제어 신호가 전달되는 단계 및 로봇 청소기(100)가 제어 신호에 따라 구동되는 단계를 포함하여 이루어질 수 있다.
또한, 로봇 청소기(100)의 제어 신호를 생성하는 단계는 디스플레이부(241)에 터치 입력을 인가하여 수행될 수 있다. 특히, 터치 입력은 디스플레이부(241)에서 출력되는 로봇 청소기(100)와 그 주변 영역에 대한 영상을 매개로 인가된다. 그 결과, 위치 기반 서비스를 제공하도록 로봇 청소기(100)를 구동시키기 위하여 기설정된 패턴의 터치 입력이 인가됨에 따라 이에 대응되는 제어 신호가 생성될 수 있다.
여기서, 기설정된 패턴이란 예를 들어 디스플레이부(241)의 화면상에서 원을 그려 소정 영역을 지정하거나, 곡선 및 직선으로 이루어지는 경로를 그리거나, 디스플레이부(241)의 화면을 구획하는 구획선을 그릴 수 있다.
이와 같이 터치 입력을 통해 제어 신호를 입력함에 따라, 위치 기반 서비스는 이동 경로 설정 기능, 청소 영역 지정 기능, 그리고 청소 금지 영역 지정 기능 중 적어도 어느 하나를 포함할 수 있다.
한편, 위치 기반 서비스는 원격 제어 장치(200)에 음성 호출 신호를 입력하면 로봇 청소기(100)가 원격 제어 장치(200)의 위치로 이동하는 호출 기능을 포함할 수 있다.
원격 제어 장치(200)에는 마이크(222)로 구비되는바, 원격 제어 장치(200)는 마이크(222)를 통해 음성 호출 신호를 로봇 청소기(100)에 전달하여 로봇 청소기(100)를 원격 제어 장치(200)의 위치, 즉 사용자의 위치로 호출할 수 있다.
도 17은 본 발명의 또 다른 일 실시예에 따른 로봇 청소기 시스템의 제어방법에 있어서 로봇 청소기를 감지하는 단계를 설명하기 위한 흐름도이다.
본 발명의 또 다른 일 실시예에 따른 로봇 청소기 시스템의 제어방법은 기본 적인 구성에 있어서 본 발명의 일 실시예에 따른 로봇 청소기 시스템과 동일하나, 로봇 청소기(100)의 형상을 통해 로봇 청소기(100)를 감지하고 그 위치 정보를 생성하는 점에서 차이점을 가진다.
먼저, 로봇 청소기(100)를 감지하는 단계(S 200)는 도 17에 도시된 바와 같이 영상 정보의 이미지를 개선하는 단계(S 210'), 로봇 청소기(100)의 형상을 감지하는 단계(S 220'), 감지된 로봇 청소기(100)의 형상이 유효한 형상인지 판단하는 단계(S 230'), 그리고 로봇 청소기(100)를 인식하는 단계 (S 240)를 포함하여 이루어질 수 있다.
여기서, 원격 제어 장치(200)의 단말기 제어부(270)에는 로봇 청소기(100)의 형상이 기 저장되어, 이를 이용하여 상기 영상 정보로부터 로봇 청소기(100)의 형상을 감지할 수 있다.
한편, 감지된 로봇 청소기(100)의 형상이 유효한 형상인지 판단하는 단계에서, 만약 유효한 형상이 아니라면 다시 카메라(221')를 통해 로봇 청소기(100)와 그 주변 영역에 대한 영상 정보를 생성하는 단계가 수행될 수 있다. (S 260')
다음으로, 로봇 청소기(100)의 위치 정보를 생성하는 단계가 수행될 수 있다. (S 300)
또한, 로봇 청소기(100)의 위치 정보를 생성하는 단계는 로봇 청소기(100)의 실제 형상과 상기 영상 정보에 의하여 파악되는 상대적인 형상을 비교하여 수행될 수 있다. 여기서, 단말기 제어부(270)는 상기 영상 정보에 의하여 파악되는 로봇 청소기(100)의 수평 화각, H/W ratio, 상향각 및 방위각 등이 팩터 등을 기초로 로봇 청소기(100)의 위치 정보를 생성할 수 있다.
이하에서는 도 18을 참조하여, 인식 수단의 다른 실시예를 설명한다.
먼저, 도 1에 도시된 바와는 달리 인식 수단은 하나가 아닌 복수 개 구비됨이 바람직하다. 왜냐하면, 인식 수단이 촬영에 의해 왜곡될 우려가 있기 때문이다. 그리고, 매핑 과정에서 작은 오차가 실제로는 큰 오차로 나타날 수 있기 때문이다. 아울러, 외부 광원, 예를 들어 햇빛이나 조명 등을 통해서 인식 수단이 왜곡되어 촬영될 수 있기 때문이다.
따라서, 이러한 왜곡을 보상하기 위해서 인식 수단은 적어도 3 개소 이상 구비됨이 바람직하다.
한편, 도 1에 도시된 바와 같이, 인식 마크(112)와 같은 인식 수단은 청소기 본체(110) 외면에 구비될 수 있다. 따라서, 인식 마크(112)로 인해 청소기의 외부 디자인이 훼손될 우려가 있다. 최근에는 인위적은 디자인 패턴이나 문양을 배제하고 자연 그대로의 재질감을 갖도록 로봇 청소기의 디자인이 진행되는 추세에 있다. 이러한 추세를 거슬러 인식 수단이 마련되는 것은 바람직하지 않을 수 있다.
따라서, 이러한 인식 마크(112)와 같은 인식 수단이 선택적으로 본체 외부에 구비되도록 할 수 있다. 예를 들어, 착탈 가능한 시트 형태로 인식 마크(112)를 제작하여 무선 컨트롤을 수행하거나, 이를 위해 청소기를 촬영할 때 인식 마크(112)를 본체 외부에 부착할 수 있다. 그리고, 평상시에는 이러한 인식 마크(112)를 본체 외부에서 제거할 수 있다.
일례로, 인식 마크(112)에 복수 개의 자석을 구비시키고, 이러한 자석에 대응되는 복수 개의 자석이 본체 내부에 구비될 수 있다. 따라서, 인식 마크(112)를 제거하는 경우 청소기 본래의 외형 디자인의 손상이 방지될 수 있다. 아울러, 필요시에만 인식 마크(112)를 청소기 본체(110)에 부착하여 사용하는 것이 가능하다. 제거된 인식 마크(112)는 냉장고와 같은 가전제품의 도어에 부착될 수 있다. 따라서, 보관이 간편하도록 제작될 수 있다.
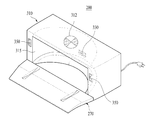
한편, 본 발명의 일 실시예에 따른 로봇 청소기 시스템은 로봇 청소기가 충전되는 충전대(300)를 포함할 수 있다. 이러한 충전대는 로봇 청소기에서 매우 일반적인 구성이라 할 수 있다. 그러나, 전술한 인식 수단은 로봇 청소기(100) 및/또는 충전대에 구비될 수 있고, 이러한 충전대의 인식 수단을 통해 로봇 청소기에 대한 위치 기반 서비스와 동일하거나 유사한 위치 기반 서비스를 제공할 수 있을 것이다.
도 18에는 충전대(300)의 일례가 도시되어 있다.
충전대(300)에는 센서부(350)가 구비될 수 있고, 이러한 센서부가 로봇 청소기(100)의 근거리통신모듈(182) 등과 신호를 송수신할 수 있다. 이러한 센서부(350) 등을 통한 통신을 통해서 상기 로봇 청소기(100)가 충전대(200)로 복귀하도록 유도할 수 있다.
상기 충전대(300)는 충전대 본체(310)를 포함할 수 있으며, 상기 본체(310)에는 상기 로봇 청소기(100)가 장착될 수 있도록 슬롯(350)이 구비될 수 있으며, 상기 슬롯(350)에는 충전단자(330)가 구비될 수 있다.
일반적으로, 로봇 청소기(100)는 SLAM(simultaneous location and mapping) 기술을 통해 가정 내(청소 영역) 내에서 본인의 위치와 자세를 인식하고 있다. 아울러, 충전대(300)의 위치를 파악할 수 있으며, 충전대(300)를 기준으로 본인의 상대적인 위치와 자세 또한 인식할 수 있다.
따라서, 전술한 로봇 청소기(100)를 기준으로 실제 영역과 가상 영역을 매핑하는 것과 마찬가지로, 충전대(300)를 기준으로 실제 영역과 가상 영역을 매핑하는 것이 가능할 수 있다.
구체적으로는, 상기 충전대(300)에도 전술한 바와 동일하거나 유사한 인식 수단이 마련될 수 있다. 도 18에는 인식 마크(312)가 인식 수단의 일례로 구비되는 것이 도시되어 있다.
사용자가 원격 제어 장치(200)를 통해서 동일한 영상 정보를 생성할 수 있다. 즉, 충전대(300)에 구비되는 인식 마크(312)를 통해서, 충전대(300) 주변의 실제 영역과 원격 제어 장치(200)의 디스플레이부에 표시되는 가상 영역을 매핑할 수 있다. 아울러, 이러한 매핑을 통해서 전술한 바와 같이 동일한 위치 기반 서비스를 제공할 수 있다.
예를 들어, 사용자는 디스플레이부를 보면서 충전대(300) 인근 영역을 청소 영역으로 지정할 수 있다. 이러한 가상 청소 영역은 매핑 정보를 기반으로 실제 영역으로 상기 충전대(300) 또는 로봇 청소기(100)로 전송될 수 있다.
상기 로봇 청소기(100)는 충전대(300)를 기준으로 현재 위치를 파악하고 있기 때문에, 지정된 실제 영역을 파악할 수 있다.
예를 들어, 사용자가 가상 영역에서 충전대(300)에서 오른쪽으로 5센티미터 떨어진 영역을 지정하는 경우, 매핑 정보를 통해서 실제로는 오른쪽으로 3미터 떨어진 영역을 지정할 수 있다. 이때, 로봇 청소기는 실제로 충전대(300)에서 5미터 떨어져 위치되어 가상 영역에 나타나지 않을 수 있다. 그럼에도 불구하고, 로봇 청소기(100)는 충전대에 대한 본인의 위치를 파악하고 있기 때문에, 실제 영역으로 주행하여 청소를 수행할 수 있게 된다.
따라서, 충전대(300)에 인식 수단을 구비함으로써 마찬가지의 효과를 얻을 수 있게 된다. 다만, 이 경우 실제 로봇 청소기(100)를 촬영하지 않고, 상기 충전대(300)는 일반적으로 고정되는 구성이므로, 제어 가능한 영역은 충전대(300) 인근 지역으로 한정될 수밖에 없을 것이다.
전술한 바와 같이, 로봇 청소기(100) 또는 충전대(300)에 구비되는 인식 수단을 통해 가상 영역과 실제 영역의 매핑을 수행하여 위치 기반 서비스를 제공할 수 있는 로봇 청소기 시스템 및 제어방법에 대해서 상세히 설명하였다. 구체적으로는 인식 수단으로서 인식 마크를 일례로 상세히 설명하였다.
그러나, 인식 마크(112, 312)와 같은 인식 수단은 로봇 청소기(100)의 충전대(300)의 외관 디자인에 영향을 미칠 수 있다. 최근에는 단순하면서도 재질 고유의 질감이나 색감이 외관 디자인으로 표현되도록 하는 미니멀 디자인이 선호되고 있다. 이러한 미니멀 디자인에 대해서 상기 인식 마크(112, 312)와 같은 인식 수단은 외관 디자인의 손상을 가져올 수 있다.
따라서, 로봇 청소기(100)나 충전대(300)의 고유 디자인을 손상시키지 않으면서도 용이하게 감지할 수 있는 인식 수단이 마련될 필요가 있다.
도 19에 도시된 바와 같이, 로봇 청소기(100)의 본체(110)는 외벽(111)을 포함할 수 있다. 패널 형태로 제작된 외벽(111)을 통해 외관이 형성되며, 외벽(111) 내측으로 다양한 구성들이 구비될 수 있다.
본 실시예에서는 인식 수단으로서 조명 이미지(412)를 제공할 수 있다. 이러한 조명 이미지(412)는 선택적으로 활성화될 수 있다. 즉, 광원(400)의 선택적인 발광 또는 활성화를 통해, 조명 이미지(412)가 생성되거나 제거될 수 있다.
구체적으로, 상기 외벽(111)은 컬러층(111b)와 반사층(111c)을 포함할 수 있다. 즉, 외부로부터 컬러층(111b)이 형성되거 이의 내측으로 반사층(111c)이 형성될 수 있다. 상기 컬러층(111b)은 본체(110)의 외부 디자인 색감을 표현하게 된다.
기본적으로, 상기 반사층(111c)을 통해 외부에서의 광원이 외벽(111) 내측으로 투과되지 않는다. 따라서, 반사층(111c)의 내측을 사용자가 볼 수 없다. 아울러, 상기 컬러층(111b) 외부에는 투명층(111a)가 구비되어 보다 매끈하고 광택이 나는 외형 디자인을 구현할 수 있다.
한편, 조명 이미지(412)의 선택적인 발생 또는 활성화를 위해, 상기 반사층(111c)의 내측에는 조명장치(400)가 구비될 수 있다. 일례로 상기 조명장치(400)는 LED 조명장치를 포함할 수 있으며, LED 소자를 포함할 수 있다. 따라서, LED 조명장치나 LED 소자의 활성화에 의해서 본체(111) 내부에서 본체 외부로 빛이 조사될 수 있다. 이러한 빛은 상기 반사층(111c)을 투사하여 상기 외벽(111)에 일정한 조명 이미지(111a)를 형성할 수 있다.
즉, 도 19에 도시된 바와 같이, 조명장치(400)의 불활성화인 경우, 외벽(111)에는 조명 이미지(412)가 생성되지 않으며, 아울러 조명장치(400)가 외부로 보이지도 않는다. 따라서, 조명장치(400)의 불활성화인 경우, 제품 고유의 디자인이 손상되지 않는다.
반대로, 조명장치(400)이 활성화된 경우, 외벽(111)에는 조명 이미지(412)가 생성되며, 원격 제어 장치(200)는 이러한 조명 이미지(412)를 통해서 가상 영역과 실제 영역을 매핑하게 된다.
한편, 인식 수단으로서 조명 이미지(412)를 사용하는 경우 디자인 유지뿐만 아니라 어두운 환경에서도 보다 선명하게 인식 수단이 인지될 수 있다.
도 20은 조명 이미지(412)가 활성화되기 이전과 이후의 로봇 청소기(100)의 모습을 도시하고 있다. 즉, 조명 이미지(412)가 활성화되기 이전에는 일반적인 로봇 청소기(100)의 외관 디자인이 그대로 유지될 수 있다. 그러나, 조명 이미지(412)가 활성화되면 본체(110) 외부에서 조명 이미지(412)가 발생되어, 외부에서 용이하게 이를 인식할 수 있게 된다.
이러한 조명 이미지는 LED 소자당 단일 조명 이미지들이 다양한 형상을 갖도록 배열될 수 있다. 또한, 복수 개의 LED 소자를 갖는 LED 조명 장치를 통해 일정한 영역에 조명 이미지를 형성하는 것도 가능하다. 예를 들어, LED 조명 장치를 통해, 원형이나 다각형의 형상을 갖는 조명 이미지를 형성하는 것도 가능하다.
조명 이미지는 빛에 의해서 형성되기 때문에, 어두운 환경에서도 보다 용이하게 인식될 수 있다. 따라서, 조금 어두운 실내에서도 조명을 켜지 않은 상태에서도 용이하게 사용할 수 있게 된다.
여기서, 조명 이미지(412)는 항상 활성화되지 않는 것이 바람직하다. 즉, 필요한 경우에만 활성화됨이 바람직하다.
도 14에 도시된 바와 같이, 사용자가 원격 제어 장치(200)를 통해 로봇 청소기(100)를 원격 제어하거나, 위치 기반 서비스를 사용하고자 하는 경우에 활성화될 수 있다. 즉, 이러한 제어를 위한 초기화(S10) 단계에서 조명 이미지(412)가 활성화될 수 있다. 그리고, 이러한 초기화(S10) 단계를 거쳐 이후의 단계들이 수행될 수 있다.
예를 들어, 상기 원격 제어 등과 같은 서비스는 원격 제어 장치(200)에 설치된 어플리케이션을 통해 수행될 수 있다. 따라서, 사용자가 원격 제어 장치(200)에서 상기 어플리케이션을 실행하면, 상기 원격 제어 장치(200)에서 실행 명령을 상기 로봇 청소기(100)로 전달할 수 있다. 이러한 실행 명령을 바탕으로 상기 로봇 청소기(100)에서는 상기 조명장치(400)에 전원을 인가하여, 조명 이미지(412)가 활성화되도록 할 수 있다.
즉, 상기 조명 이미지(412)는 초기화 단계(S10)에서 상기 원격 제어 장치(100)를 통해 활성화되며, 이후 어플리케이션을 통한 위치 기반 서비스가 수행되는 도중 지속적으로 활성화를 유지할 수 있다. 그리고, 어플리케이션의 종료를 통해, 상기 조명 이미지(412)의 활성화가 해제될 수 있다.
전술한 바와 같이, 조명 이미지(412)는 원격 제어 장치(100)를 사용하는 경우에만 활성화됨이 바람직하다. 따라서, 사용자뿐만 아니라 다른 사용자들도 로봇 청소기(100)의 모습을 보고 직관적으로 원격 제어 장치(100)가 사용되고 있음을 파악할 수 있다. 아울러, 조명 이미지(412)를 통해 고유의 디자인뿐만 아니라 새로운 디자인이 구현될 수 있고, 사용자에게 제품 고유의 기능뿐만 아니라 유희 기능을 제공할 수 있게 된다.
한편, 전술한 바와 같이, 인식 수단은 다양한 형태로 형성될 수 있으며, 위치 또한 다양하게 형성될 수 있다. 아울러, 인식 수단의 형상이나 갯수 및 개소도 다양하게 변형될 수 있다.
인식 수단은 실제 영역과 가상 영역을 매우 정확하게 매핑하기 위해서 사용됨이 바람직하다. 따라서, 인식 수단을 통해 오차가 최소화됨이 바람직하다. 왜냐하면, 작은 영역에서의 오차가 큰 영역으로 매핑되는 경우에는 그 오차가 훨씬 커지기 때문이다.
따라서, 정확하고 정밀한 매핑을 위해서, 인식 수단은 복수 개소, 예를 들어 적어도 3개의 개소에 구비됨이 바람직할 수 있다. 그리고, 이 경우, 다양한 형상을 갖는 인식 수단이 마련됨이 바람직하다.
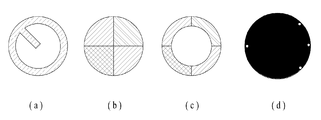
일반적으로, 원형의 이미지는 다양한 각도에서 왜곡 발생 우려가 가장 적다. 왜냐하면, 항상 원형의 중심은 용이하게 파악될 수 있기 때문이다. 따라서, 복수 개의 인식 수단 중에서는 원형의 이미지 또는 마크와 같은 인식 수단을 포함함이 바람직하다.
일반적으로, 외부 조명이나 햇빛과 같은 광원에 의해서 본체(110) 외부에 창문이나 조명 빛이 반사될 수 있다. 그러나, 본체(110) 상부는 매우 완만한 곡면 형태로 제작될 수 있다. 따라서, 이러한 반사는 본체(110) 상부의 일부분에서만 발생된다. 물론, 이러한 반사는 인식 수단을 왜곡시킬 수 있다.
이러한 문제에 탄력적으로 대응하기 위하여, 전술한 바와 같이 인식 수단은 복수 개 구비됨이 바람직하다. 일례도 도 1에 도시된 바와 달리, 본체 상면의 좌측 상하 그리고 본체 상면의 우측 상하에 각각 인식 수단을 마련할 수 있다. 따라서, 외부 광원 등에 의해 인식 수단이 왜곡되어 오차가 크게 발생되는 것을 미연에 방지할 수 있게 된다.
도 21은 다양한 형태의 인식 수단 형태를 도시하고 있다. 물론 도시된 인식 수단은 마크 형태일 수 있으며 조명 이미지일 수 있다. 다양한 색상을 가질 수 있으며, 특히 선명한 원색 계열을 가질 수도 있다. 예를 들어, 도 21a 내지 도 21c에 도시된 바와 같이 비쥬얼 마크 형태일 수 있으며, 도 21d에 도시된 바와 같이 IR 마크 형태일 수 있다. 이러한 인식 수단에서는 평면으로 투영되었을 때 직선부가 명확히 파악될 필요가 있다. 따라서, 각각의 인식 수단에서는 적어도 두 개의 지점이 서로 연결되어 직선부가 명확히 나타나도록 마련될 필요가 있다.
도 22은 원격 제어 장치(200)에 표시되는 화면의 일례로써, 어플리케이션이 실행된 초기 화면이라 할 수 있다. 이러한 어플리케이션 초기 화면을 통해 다양한 컨텐츠를 선택할 수 있다.
일례로, 초기 화면에는 원격 제어라는 아이콘이 표시될 수 있다. 이러한 원격 제어 아이콘을 통해서 전술한 위치 기반 제어 서비스를 실행하는 것이 가능하다.
상기와 같이 설명된 로봇 청소기 시스템 및 그 제어방법은 상기 설명된 실시예들의 구성과 방법이 한정되게 적용될 수 있는 것이 아니라, 상기 실시예들은 다양한 변형이 이루어질 수 있도록 각 실시예들의 전부 또는 일부가 선택적으로 조합되어 구성될 수 있다.
100 : 로봇 청소기 112 : 인식 마크
180 : 제1 무선 통신부 200 : 원격 제어 장치 210 : 제2 무선 통신부 222' : 카메라 241 : 디스플레이부 300 : 충전대
180 : 제1 무선 통신부 200 : 원격 제어 장치 210 : 제2 무선 통신부 222' : 카메라 241 : 디스플레이부 300 : 충전대
Claims (20)
- 자동으로 주행하면서 청소를 수행하는 로봇 청소기;
상기 로봇 청소기의 충전대; 그리고
상기 로봇 청소기를 원격으로 제어하는 원격 제어 장치를 포함하며,
상기 원격 제어 장치는, 카메라를 통해 생성되는 로봇 청소기와 상기 로봇 청소기의 주변 영역에 대한 영상 정보 또는 상기 충전대와 상기 충전대의 주변 영역에 대한 영상 정보를 통해, 실제 영역과 가상 영역의 매핑 정보를 생성함을 특징으로 하는 로봇 청소기 시스템. - 제 1 항에 있어서,
상기 원격 제어 장치는, 상기 영상 정보를 통해, 상기 로봇 청소기 또는 충전대를 감지하여 상기 로봇 청소기의 위치 정보와 자세 정보 또는 상기 충전대의 위치 정보와 자세 정보를 생성함을 특징으로 하는 로봇 청소기 시스템. - 제 1 항에 있어서,
상기 원격 제어 장치는, 상기 로봇 청소기의 실제 형상 또는 상기 충전대의 실제 형상과 상기 영상 정보를 통해 파악되는 상대적인 형성을 비교하여, 상기 실제 영역과 가상 영역의 매핑 정보를 생성함을 특징으로 하는 로봇 청소기 시스템. - 제 1 항 내지 제 3 항 중 어느 한 항에 있어서,
상기 로봇 청소기 또는 상기 충전대에는 상기 매핑 정보 생성을 위한 인식 수단이 구비됨을 특징으로 하는 로봇 청소기 시스템. - 제 4 항에 있어서,
상기 원격 제어 장치는, 상기 인식 수단의 실제 형상 정보와 상기 영상 정보에 의해 파악되는 상대적인 형상 정보를 비교하여, 상기 매핑 정보를 생성함을 특징으로 하는 로봇 청소기 시스템. - 제 5 항에 있어서,
상기 원격 제어 장치는,
상기 영상 정보를 표시하는 디스플레이부; 그리고
상기 로봇 청소기의 제어 신호를 입력하는 입력부를 포함함을 특징으로 하는 로봇 청소기 시스템. - 제 6 항에 있어서,
상기 디스플레이부는 터치 입력을 감지하는 터치 센서를 포함하여 상기 입력부로서 기능하는 것을 특징으로 하는 로봇 청소기 시스템. - 제 4 항에 있어서,
상기 인식 수단은 상기 로봇 청소기 또는 충전대의 본체 외주면에 구비되는 인식 마크를 포함함을 특징으로 하는 로봇 청소기 시스템. - 제 8 항에 있어서,
상기 인식 마크는 상기 본체 외주면에 선택적으로 착탈 가능하도록 구비됨을 특징으로 하는 로봇 청소기 시스템. - 제 4 항에 있어서,
상기 인식 수단은 상기 로봇 청소기의 본체에 복수 개소에 구비됨을 특징으로 하는 로봇 청소기 시스템. - 제 4 항에 있어서,
상기 인식 수단은 로봇 청소기 본체 또는 충전대의 본체 내부에서 상기 본체 외부를 향하여 빛을 공급하는 LED 조명을 포함함을 특징으로 하는 로봇 청소기 시스템. - 제 11 항에 있어서,
상기 본체의 외벽은 외부에서부터 컬러층과 반사층을 포함하여 이루어지고, 상기 LED 조명은 상기 반사층 하부에 구비되어, 상기 LED 조명이 불활성화 상태에서 상기 LED 조명이 상기 본체의 외벽 외부로 가시적인 노출이 배제됨을 특징으로 하는 로봇 청소기 시스템. - 제 11 항에 있어서,
상기 LED 조명은 상기 원격 제어 장치에서 상기 로봇 청소기를 제어하기 위한 어플리케이션의 실행 시에 상기 원격 제어 장치의 제어 신호를 통해 활성화됨을 특징으로 하는 로봇 청소기 시스템. - 로봇 청소기, 상기 로봇 청소기의 충전대 그리고 카메라 및 디스플레이부를 갖는 원격 제어 장치를 포함하는 로봇 청소기 시스템의 제어방법에 있어서,
상기 카메라를 통해 상기 로봇 청소기 또는 충전대와 주변 영역에 대한 영상 정보를 생성하는 단계;
상기 영상 정보를 통해서 실제 영역과 상기 디스플레이부에 나타나는 가상 영역을 매핑하는 단계; 그리고
상기 디스플레이부에 나타나는 가상 영역을 통하여 상기 로봇 청소기의 위치 기반 서비스가 수행되는 단계를 포함하는 로봇 청소기 시스템의 제어방법. - 제 14 항에 있어서,
상기 매핑 단계는,
상기 영상 정보를 기초로 상기 로봇 청소기 또는 충전대를 감지하는 단계; 그리고
상기 로봇 청소기 또는 충전대의 위치 정보를 생성하는 단계를 포함함을 특징으로 하는 로봇 청소기 시스템의 제어방법. - 제 14 항에 있어서,
상기 감지하는 단계는,
상기 영상 정보의 이미지를 개선하기 위하여, 이미지의 밝기 조정, 노이즈 제거 및 컬러 보정 중 적어도 어느 하나를 포함하여 수행함을 특징으로 하는 로봇 청소기 시스템의 제어방법. - 제 14 항에 있어서,
상기 위치 기반 서비스를 제공하는 단계에서는,
상기 가상 영역에서의 상기 로봇 청소기의 주행 입력이 상기 매핑 정보를 통하여 상기 실제 영역에서의 상기 로봇 청소기의 주행 명령 신호로 변환되어 전달됨을 특징으로 하는 로봇 청소기 시스템의 제어방법. - 제 17 항에 있어서,
상기 위치 기반 서비스를 제공하는 단계에서는,
상기 디스플레이부에 나타나는 가상 영역에 대한 터치 입력을 통하여 상기 로봇 청소기의 주행 명령 신호가 생성됨을 특징으로 하는 로봇 청소기 시스템의 제어방법. - 제 14 항 내지 제 18 항 중 어느 한 항에 있어서,
상기 위치 기반 서비스는,
상기 로봇 청소기의 이동 경로 설정 기능, 청소 영역 지정 기능, 청소 금지 영역 지정, 그리고 사용자 위치로 접근 설정 기능 중 적어도 어느 하나를 포함하는 것을 특징으로 하는 로봇 청소기 시스템의 제어방법. - 제 14 항 내지 제 18 항 중 어느 한 항에 있어서,
상기 로봇 청소기 또는 충전대에 구비되는 인식 수단을 활성화시키는 단계가 더 포함됨을 특징으로 하는 로봇 청소기 시스템의 제어방법.
Priority Applications (11)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/062,633 US9675226B2 (en) | 2012-10-26 | 2013-10-24 | Robot cleaner system and control method of the same |
| EP16178884.9A EP3112970B1 (en) | 2012-10-26 | 2013-10-25 | Robot cleaner system |
| EP13190270.2A EP2725443B1 (en) | 2012-10-26 | 2013-10-25 | Robot cleaner system and control method of the same |
| EP16178895.5A EP3121677B1 (en) | 2012-10-26 | 2013-10-25 | Robot cleaner system control method |
| EP16178899.7A EP3125062B1 (en) | 2012-10-26 | 2013-10-25 | Remote control device for a robot cleaner |
| CN201610586644.2A CN106235950B (zh) | 2012-10-26 | 2013-10-28 | 机器人清洁器 |
| CN201310516450.1A CN103784079B (zh) | 2012-10-26 | 2013-10-28 | 机器人清洁器系统及其控制方法 |
| CN201610586651.2A CN106175615B (zh) | 2012-10-26 | 2013-10-28 | 机器人清洁器系统的控制方法及遥控设备 |
| US15/248,863 US10058224B2 (en) | 2012-10-26 | 2016-08-26 | Robot cleaner system and control method of the same |
| US15/248,771 US10327617B2 (en) | 2012-10-26 | 2016-08-26 | Robot cleaner system and control method of the same |
| US15/248,826 US10052004B2 (en) | 2012-10-26 | 2016-08-26 | Robot cleaner system and control method of the same |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120119843 | 2012-10-26 | ||
| KR20120119843 | 2012-10-26 |
Related Child Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160018775A Division KR102103724B1 (ko) | 2012-10-26 | 2016-02-17 | 로봇 청소기용 원격제어장치 |
| KR1020160018774A Division KR102103723B1 (ko) | 2012-10-26 | 2016-02-17 | 로봇 청소기용 원격제어장치 |
| KR1020160018773A Division KR102120107B1 (ko) | 2012-10-26 | 2016-02-17 | 로봇 청소기 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20140053764A true KR20140053764A (ko) | 2014-05-08 |
| KR101893152B1 KR101893152B1 (ko) | 2018-08-31 |
Family
ID=50886294
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020130106870A KR101893152B1 (ko) | 2012-10-26 | 2013-09-05 | 로봇 청소기 시스템 및 그 제어방법 |
| KR1020160018775A KR102103724B1 (ko) | 2012-10-26 | 2016-02-17 | 로봇 청소기용 원격제어장치 |
| KR1020160018773A KR102120107B1 (ko) | 2012-10-26 | 2016-02-17 | 로봇 청소기 |
| KR1020160018774A KR102103723B1 (ko) | 2012-10-26 | 2016-02-17 | 로봇 청소기용 원격제어장치 |
Family Applications After (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160018775A KR102103724B1 (ko) | 2012-10-26 | 2016-02-17 | 로봇 청소기용 원격제어장치 |
| KR1020160018773A KR102120107B1 (ko) | 2012-10-26 | 2016-02-17 | 로봇 청소기 |
| KR1020160018774A KR102103723B1 (ko) | 2012-10-26 | 2016-02-17 | 로봇 청소기용 원격제어장치 |
Country Status (3)
| Country | Link |
|---|---|
| EP (2) | EP3121677B1 (ko) |
| KR (4) | KR101893152B1 (ko) |
| CN (2) | CN106235950B (ko) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20160008856A (ko) * | 2014-07-15 | 2016-01-25 | 엘지전자 주식회사 | 도킹 스테이션 및 이를 구비한 로봇 청소 시스템 |
| WO2018074821A1 (ko) * | 2016-10-19 | 2018-04-26 | (주)잼투고 | 터치 유저 인터페이스를 이용한 카메라의 이동경로와 이동시간의 동기화를 위한 사용자 단말장치 및 컴퓨터 구현 방법 |
| KR20200066708A (ko) * | 2017-10-26 | 2020-06-10 | 에이비 엘렉트로룩스 | 로봇 청소기와 공간 정보를 교환하기 위한 증강 현실 사용 |
| KR102121458B1 (ko) | 2018-12-28 | 2020-06-10 | 한국생산기술연구원 | 자동 충전을 위한 로봇 청소기의 경로 추정 방법 및 이를 이용한 로봇 청소기 |
| CN113315918A (zh) * | 2021-07-28 | 2021-08-27 | 湖南涉外经济学院 | 计算机网络数据处理方法及系统 |
| CN113509102A (zh) * | 2020-04-10 | 2021-10-19 | 松下知识产权经营株式会社 | 吸尘器系统和吸尘器 |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102613624B1 (ko) * | 2016-10-10 | 2023-12-15 | 엘지전자 주식회사 | 공항용 청소 로봇 및 그의 동작 방법 |
| CN107080490A (zh) * | 2017-06-22 | 2017-08-22 | 肇庆市智高电机有限公司 | 一种家用智能吸尘器 |
| CN107943037A (zh) * | 2017-11-28 | 2018-04-20 | 上海与德科技有限公司 | 一种基于智能扫地机器人的控制方法及系统 |
| JP2019109853A (ja) * | 2017-12-20 | 2019-07-04 | 東芝ライフスタイル株式会社 | 自律走行体および自律走行体システム |
| CN107960953A (zh) * | 2017-12-27 | 2018-04-27 | 江苏美的清洁电器股份有限公司 | 清洁机器人及其控制方法、控制装置 |
| CN108078504A (zh) * | 2018-01-28 | 2018-05-29 | 北京工业大学 | 一种房屋死角自主清洁装置 |
| CN110237545A (zh) * | 2018-03-08 | 2019-09-17 | 徐志强 | 一种视频遥控方法、遥控器及遥控玩具 |
| CN108403009A (zh) * | 2018-03-08 | 2018-08-17 | 徐志强 | 一种扫地机器人及其控制方法 |
| CN110389341B (zh) | 2018-04-18 | 2021-06-25 | 深圳市优必选科技有限公司 | 充电桩识别方法、装置、机器人及计算机可读存储介质 |
| WO2019209877A1 (en) * | 2018-04-23 | 2019-10-31 | Sharkninja Operating Llc | Techniques for bounding cleaning operations of a robotic surface cleaning device within a region of interest |
| WO2020014495A1 (en) * | 2018-07-13 | 2020-01-16 | Irobot Corporation | Mobile robot cleaning system |
| CN109725580A (zh) * | 2019-01-17 | 2019-05-07 | 深圳市锐曼智能装备有限公司 | 机器人的远程控制方法 |
| CN117666402A (zh) * | 2022-08-30 | 2024-03-08 | 北京小米移动软件有限公司 | 交互方法、装置、电子设备及存储介质 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20080029548A (ko) * | 2006-09-29 | 2008-04-03 | 삼성전자주식회사 | 실사기반 이동기기 제어 방법 및 장치 |
| KR20110035038A (ko) * | 2009-09-29 | 2011-04-06 | 엘지전자 주식회사 | 휴대 단말기 및 그 동작 제어방법 |
| KR20110119118A (ko) * | 2010-04-26 | 2011-11-02 | 엘지전자 주식회사 | 로봇 청소기, 및 이를 이용한 원격 감시 시스템 |
| US20120121127A1 (en) * | 2010-11-12 | 2012-05-17 | Fujitsu Limited | Image processing apparatus and non-transitory storage medium storing image processing program |
| KR20130030943A (ko) * | 2011-09-20 | 2013-03-28 | 엘지전자 주식회사 | 로봇 청소기 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6496754B2 (en) * | 2000-11-17 | 2002-12-17 | Samsung Kwangju Electronics Co., Ltd. | Mobile robot and course adjusting method thereof |
| RU2220643C2 (ru) * | 2001-04-18 | 2004-01-10 | Самсунг Гванджу Электроникс Ко., Лтд. | Автоматическое чистящее устройство, автоматическая чистящая система и способ управления этой системой (варианты) |
| JP2003254716A (ja) * | 2002-03-04 | 2003-09-10 | Sony Corp | 3次元位置・姿勢計測装置及び方法、記憶媒体、並びにコンピュータ・プログラム |
| KR100478657B1 (ko) * | 2002-06-25 | 2005-03-24 | 삼성광주전자 주식회사 | 로봇 청소기 시스템 |
| KR100500842B1 (ko) * | 2002-10-31 | 2005-07-12 | 삼성광주전자 주식회사 | 로봇청소기와, 그 시스템 및 제어방법 |
| KR20060023068A (ko) * | 2004-09-08 | 2006-03-13 | 삼성전자주식회사 | 청소기 및 이를 이용한 청소방법 |
| KR100696133B1 (ko) * | 2005-04-20 | 2007-03-22 | 엘지전자 주식회사 | 청소 로봇 시스템 |
| CN2843326Y (zh) * | 2005-06-22 | 2006-12-06 | 王冬雷 | 机器人吸尘器 |
| WO2007044301A2 (en) * | 2005-10-04 | 2007-04-19 | Intersense, Inc. | Tracking objects with markers |
| KR101099808B1 (ko) * | 2005-12-02 | 2011-12-27 | 아이로보트 코퍼레이션 | 로봇 시스템 |
| KR20080050954A (ko) * | 2006-12-04 | 2008-06-10 | 한국전자통신연구원 | 청소 장치 및 그 운영 방법 |
| KR101457590B1 (ko) * | 2007-10-12 | 2014-11-03 | 엘지전자 주식회사 | 휴대 단말기 및 그 포인터 제어방법 |
| WO2009150564A2 (en) * | 2008-06-13 | 2009-12-17 | Koninklijke Philips Electronics, N.V. | Multimodal imaging fiducial marker |
| DE102009041362A1 (de) * | 2009-09-11 | 2011-03-24 | Vorwerk & Co. Interholding Gmbh | Verfahren zum Betreiben eines Reinigungsroboters |
| WO2011052826A1 (ko) * | 2009-10-30 | 2011-05-05 | 주식회사 유진로봇 | 이동 로봇의 위치 인식을 위한 지도 생성 및 갱신 방법 |
| EP2395474A3 (en) * | 2010-06-11 | 2014-03-26 | Nintendo Co., Ltd. | Storage medium having image recognition program stored therein, image recognition apparatus, image recognition system, and image recognition method |
| CN102012706B (zh) * | 2010-10-01 | 2015-06-24 | 苏州佳世达电通有限公司 | 能自动定位移动的电子装置及让其移动件自动归位的方法 |
| KR101297255B1 (ko) * | 2011-09-07 | 2013-08-19 | 엘지전자 주식회사 | 이동 로봇, 및 이동 로봇의 원격 제어 시스템 및 방법 |
-
2013
- 2013-09-05 KR KR1020130106870A patent/KR101893152B1/ko active IP Right Grant
- 2013-10-25 EP EP16178895.5A patent/EP3121677B1/en active Active
- 2013-10-25 EP EP16178899.7A patent/EP3125062B1/en active Active
- 2013-10-28 CN CN201610586644.2A patent/CN106235950B/zh active Active
- 2013-10-28 CN CN201610586651.2A patent/CN106175615B/zh active Active
-
2016
- 2016-02-17 KR KR1020160018775A patent/KR102103724B1/ko active IP Right Grant
- 2016-02-17 KR KR1020160018773A patent/KR102120107B1/ko active IP Right Grant
- 2016-02-17 KR KR1020160018774A patent/KR102103723B1/ko active IP Right Grant
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20080029548A (ko) * | 2006-09-29 | 2008-04-03 | 삼성전자주식회사 | 실사기반 이동기기 제어 방법 및 장치 |
| KR20110035038A (ko) * | 2009-09-29 | 2011-04-06 | 엘지전자 주식회사 | 휴대 단말기 및 그 동작 제어방법 |
| KR20110119118A (ko) * | 2010-04-26 | 2011-11-02 | 엘지전자 주식회사 | 로봇 청소기, 및 이를 이용한 원격 감시 시스템 |
| US20120121127A1 (en) * | 2010-11-12 | 2012-05-17 | Fujitsu Limited | Image processing apparatus and non-transitory storage medium storing image processing program |
| JP2012104060A (ja) * | 2010-11-12 | 2012-05-31 | Fujitsu Ltd | 画像処理プログラムおよび画像処理装置 |
| KR20130030943A (ko) * | 2011-09-20 | 2013-03-28 | 엘지전자 주식회사 | 로봇 청소기 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20160008856A (ko) * | 2014-07-15 | 2016-01-25 | 엘지전자 주식회사 | 도킹 스테이션 및 이를 구비한 로봇 청소 시스템 |
| WO2018074821A1 (ko) * | 2016-10-19 | 2018-04-26 | (주)잼투고 | 터치 유저 인터페이스를 이용한 카메라의 이동경로와 이동시간의 동기화를 위한 사용자 단말장치 및 컴퓨터 구현 방법 |
| KR20200066708A (ko) * | 2017-10-26 | 2020-06-10 | 에이비 엘렉트로룩스 | 로봇 청소기와 공간 정보를 교환하기 위한 증강 현실 사용 |
| US11612286B2 (en) | 2017-10-26 | 2023-03-28 | Aktiebolaget Electrolux | Using augmented reality to exchange spatial information with a robotic cleaning device |
| KR102121458B1 (ko) | 2018-12-28 | 2020-06-10 | 한국생산기술연구원 | 자동 충전을 위한 로봇 청소기의 경로 추정 방법 및 이를 이용한 로봇 청소기 |
| CN113509102A (zh) * | 2020-04-10 | 2021-10-19 | 松下知识产权经营株式会社 | 吸尘器系统和吸尘器 |
| CN113315918A (zh) * | 2021-07-28 | 2021-08-27 | 湖南涉外经济学院 | 计算机网络数据处理方法及系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102103724B1 (ko) | 2020-04-24 |
| KR102120107B1 (ko) | 2020-06-09 |
| EP3121677B1 (en) | 2020-07-22 |
| CN106235950B (zh) | 2020-09-08 |
| KR102103723B1 (ko) | 2020-04-24 |
| KR101893152B1 (ko) | 2018-08-31 |
| EP3125062A3 (en) | 2017-04-12 |
| KR20160024899A (ko) | 2016-03-07 |
| EP3125062A2 (en) | 2017-02-01 |
| EP3121677A2 (en) | 2017-01-25 |
| KR20160026938A (ko) | 2016-03-09 |
| EP3125062B1 (en) | 2020-07-01 |
| KR20160026937A (ko) | 2016-03-09 |
| CN106175615A (zh) | 2016-12-07 |
| EP3121677A3 (en) | 2017-04-12 |
| CN106175615B (zh) | 2019-09-20 |
| CN106235950A (zh) | 2016-12-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101893152B1 (ko) | 로봇 청소기 시스템 및 그 제어방법 | |
| KR101966127B1 (ko) | 로봇 청소기 시스템 및 그 제어방법 | |
| EP3112970B1 (en) | Robot cleaner system | |
| US10744636B2 (en) | Robot cleaner, robot cleaner system and control method of the same | |
| KR20160022856A (ko) | 로봇 청소기의 원격제어장치 및 그 제어방법 | |
| KR20150077231A (ko) | 로봇 청소기, 로봇 청소기 시스템 및 그 제어방법 | |
| KR101575159B1 (ko) | 주차 정보 제공을 위한 모바일 단말기용 어플리케이션의 동작방법 | |
| KR101623642B1 (ko) | 로봇 청소기, 단말장치의 제어방법 및 이를 포함하는 로봇 청소기 제어 시스템 | |
| KR101563542B1 (ko) | 모바일 단말기를 이용한 주차 정보 제공 시스템 | |
| CN109688253A (zh) | 一种拍摄方法及终端 | |
| KR102118055B1 (ko) | 로봇 청소기의 원격제어장치 및 그 제어방법 | |
| KR101565421B1 (ko) | 로봇 청소기 및 그 제어 방법 | |
| CN109489680A (zh) | 一种螺旋车道的参考轨迹线生成方法及车载设备 | |
| CN115767247A (zh) | 图像的采集方法、装置、电子设备及存储介质 | |
| KR20180079067A (ko) | 로봇 청소기 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A107 | Divisional application of patent | ||
| A201 | Request for examination | ||
| E701 | Decision to grant or registration of patent right |