KR20130052539A - 평가 장치 및 평가 방법 - Google Patents
평가 장치 및 평가 방법 Download PDFInfo
- Publication number
- KR20130052539A KR20130052539A KR1020127023300A KR20127023300A KR20130052539A KR 20130052539 A KR20130052539 A KR 20130052539A KR 1020127023300 A KR1020127023300 A KR 1020127023300A KR 20127023300 A KR20127023300 A KR 20127023300A KR 20130052539 A KR20130052539 A KR 20130052539A
- Authority
- KR
- South Korea
- Prior art keywords
- tissue
- change
- laser catheter
- evaluation result
- excitation light
- Prior art date
Links
Images

























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0071—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence by measuring fluorescence emission
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/06—Radiation therapy using light
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B10/00—Other methods or instruments for diagnosis, e.g. instruments for taking a cell sample, for biopsy, for vaccination diagnosis; Sex determination; Ovulation-period determination; Throat striking implements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/18—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves
- A61B18/20—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves using laser
- A61B18/22—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves using laser the beam being directed along or through a flexible conduit, e.g. an optical fibre; Couplings or hand-pieces therefor
- A61B18/24—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves using laser the beam being directed along or through a flexible conduit, e.g. an optical fibre; Couplings or hand-pieces therefor with a catheter
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0082—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence adapted for particular medical purposes
- A61B5/0084—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence adapted for particular medical purposes for introduction into the body, e.g. by catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/48—Other medical applications
- A61B5/4848—Monitoring or testing the effects of treatment, e.g. of medication
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6847—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive mounted on an invasive device
- A61B5/6852—Catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6867—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive specially adapted to be attached or implanted in a specific body part
- A61B5/6869—Heart
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/06—Radiation therapy using light
- A61N5/0601—Apparatus for use inside the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/06—Radiation therapy using light
- A61N5/0613—Apparatus adapted for a specific treatment
- A61N5/062—Photodynamic therapy, i.e. excitation of an agent
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00315—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for treatment of particular body parts
- A61B2018/00345—Vascular system
- A61B2018/00351—Heart
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/24—Detecting, measuring or recording bioelectric or biomagnetic signals of the body or parts thereof
- A61B5/316—Modalities, i.e. specific diagnostic methods
- A61B5/318—Heart-related electrical modalities, e.g. electrocardiography [ECG]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/06—Radiation therapy using light
- A61N5/0601—Apparatus for use inside the body
- A61N2005/0602—Apparatus for use inside the body for treatment of blood vessels
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/06—Radiation therapy using light
- A61N2005/0626—Monitoring, verifying, controlling systems and methods
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Pathology (AREA)
- Surgery (AREA)
- Biophysics (AREA)
- Molecular Biology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Physics & Mathematics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Cardiology (AREA)
- Otolaryngology (AREA)
- Optics & Photonics (AREA)
- Electromagnetism (AREA)
- Investigating, Analyzing Materials By Fluorescence Or Luminescence (AREA)
- Radiation-Therapy Devices (AREA)
- Laser Surgery Devices (AREA)
- Endoscopes (AREA)
Abstract
레이저 카테테르를 이용한 치료의 진행을 안전하게 평가 가능한 평가 장치 및 평가 방법을 제공한다.
평가 장치로서의 광선 역학적 치료 장치(1)는, 여기광을 흡수하여 형광을 발하는 광감수성 약제가 도입된 조직에, 레이저 카테테르(300)의 선단부로부터 여기광을 조사하는 장치로서, 커넥터(210)와, 광원(110)과, 광 검출부(130)를 갖는다. 커넥터(210)는, 레이저 카테테르(300)를 착탈할 수 있다. 광원(110)은 커넥터(210)를 거쳐서 레이저 카테테르(300)에 여기광을 출력한다. 광 검출부(130)는 상기 레이저 카테테르(300)의 선단부로부터 조사된 여기광과 상기 조직에 도입된 광감수성 약제와의 반응에 의한 상기 조직의 변화를 평가하기 위해서, 상기 레이저 카테테르(300)로부터 상기 커넥터(210)를 거쳐서 입사한 상기 형광의 강도를 검출한다.
평가 장치로서의 광선 역학적 치료 장치(1)는, 여기광을 흡수하여 형광을 발하는 광감수성 약제가 도입된 조직에, 레이저 카테테르(300)의 선단부로부터 여기광을 조사하는 장치로서, 커넥터(210)와, 광원(110)과, 광 검출부(130)를 갖는다. 커넥터(210)는, 레이저 카테테르(300)를 착탈할 수 있다. 광원(110)은 커넥터(210)를 거쳐서 레이저 카테테르(300)에 여기광을 출력한다. 광 검출부(130)는 상기 레이저 카테테르(300)의 선단부로부터 조사된 여기광과 상기 조직에 도입된 광감수성 약제와의 반응에 의한 상기 조직의 변화를 평가하기 위해서, 상기 레이저 카테테르(300)로부터 상기 커넥터(210)를 거쳐서 입사한 상기 형광의 강도를 검출한다.
Description
본 발명은, 레이저 카테테르를 이용한 치료의 진행을 평가하는 평가 장치 및 평가 방법에 관한 것이다.
빈맥성 부정맥의 일종으로서, 심방 세동이 알려져 있다. 심방 세동은, 폐정맥과 좌심방의 접합부 부근에 전기 펄스를 발생하는 이상 흥분 부위가 출현하고, 이 전기 펄스의 자극에 의해 좌심방이 미세하게 진동 및 수축함으로써 발생한다.
심방 세동 치료법으로서, 발명자들은 광선 역학적 치료(Photodynamic Therapy, 이하 「PDT」라 기술함)를 적용하는 것을 제안해 왔다(예를 들면, 특허문헌 1 참조). PDT에서는, 광감수성 약제가 도입된 심근 조직에 레이저 카테테르를 이용하여 여기광을 조사하여, 일중항 산소를 발생시킨다. 산화력이 강한 일중항 산소는, 이상 흥분 부위를 둘러싸는 심근 조직에 상해를 주어, 이상 흥분 부위로부터 좌심방으로의 전기 펄스의 전도를 차단(블록)하는 전기 전도 블록을 형성한다. 이 결과, 이상 흥분 부위와 좌심방 사이의 전기 전도가 차단되어, 좌심방의 비정상적인 진동 및 수축이 억제된다.
광감수성 약제는, 특정한 조직에 선택적으로 집적하는 성질을 갖는다. 따라서, 일반적으로는, 환자에게 광감수성 약제를 투여하고 나서 소정 시간(예를 들면 8 내지 48시간) 경과 후, 치료 조직의 광감수성 약제 농도가 높고 다른 조직이나 혈중 광감수성 약제 농도가 낮은 상태, 소위 광감수성 약제의 콘트라스트가 생긴 상태로 되고 나서 여기광을 조사한다. 또한, 최근 들어, 광감수성 약제의 집적성을 이용하지 않고, 광감수성 약제가 혈액에 의해 피치료 조직으로 딜리버리된 시점에서 여기광을 조사하는 PDT도 제안되고 있다.
여기광 조사 부위의 조직의 파괴나 전기 전도 블록의 형성 등을 평가하는 방법으로서, 전극 등의 검출 수단이 설치된 카테테르 등의 디바이스를 여기광 조사 부위로 유도하고, 이 카테테르를 이용하여 평가를 행하는 것이 생각된다. 그러나 광을 이용한 치료에 있어서, 조사 부위와 전극에 의한 전위 측정 부위가 엄밀하게는 일치하지 않기 때문에, 보다 정확한 치료 효과를 리얼타임으로 평가하는 수단이 요구되고 있다.
이상과 같은 사정을 감안하여, 본 발명의 목적은, 레이저 카테테르를 이용한 치료의 진행을 정확하면서 리얼타임으로 평가 가능한 평가 장치 및 평가 방법을 제공하는 데 있다.
상기 목적을 달성하기 위해서, 본 발명의 일 형태에 따른 평가 장치는, 여기광을 흡수하여 형광을 발하는 광감수성 약제가 도입된 조직에, 레이저 카테테르의 선단부로부터 상기 여기광을 조사하는 장치로서, 접속부와, 광원과, 검출부를 갖는다.
상기 접속부는 상기 레이저 카테테르가 착탈 가능하다.
상기 광원은 상기 접속부를 거쳐서 상기 레이저 카테테르에 상기 여기광을 출력한다.
상기 검출부는 상기 레이저 카테테르의 선단부로부터 조사된 여기광과 상기 조직에 도입된 광감수성 약제와의 반응에 의한 상기 조직의 변화를 평가하기 위해서, 상기 레이저 카테테르로부터 상기 접속부를 거쳐서 입사한 상기 형광의 강도를 검출한다.
레이저 카테테르로부터 입사한 형광의 강도를 검출함으로써, 여기광과 광감수성 약제와의 반응에 의한 조직의 변화를 리얼타임으로 추정할 수 있다. 이에 의해, 레이저 카테테르를 이용한 치료의 진행을 평가할 수 있다. 또한, 치료에 이용하는 레이저 카테테르를 이용함으로써, 조작이 간편해진다. 또한, 「조직의 변화」란, 예를 들면 살세포 효과, 전기 전도 블록 등의 조직으로의 상해, 손상, 열변성 등을 말한다.
상기 검출부는, 상기 레이저 카테테르의 선단부로부터 조사된 여기광과 상기 조직에 도입된 광감수성 약제와의 반응에 의한 상기 조직의 변화와, 상기 레이저 카테테르의 선단부의 상기 조직에 대한 접촉 상태의 변화를 동시에 평가하기 위해서, 상기 레이저 카테테르로부터 상기 접속부를 거쳐서 입사한 상기 형광의 강도를 검출해도 된다.
심장 내에서의 레이저 카테테르에서의 치료 중은 특히, 레이저 카테테르가 호흡이나 심박의 영향으로 움직여서, 치료 대상 조직에 대한 접촉 상태가 변화하는 경우가 있다. 본 실시 형태에 따르면, 리얼타임으로 심근 조직의 변화와, 레이저 카테테르 선단부의 접촉 상태를 감시하여, 상황에 따른 조사 조건의 설정·변경을 행할 수 있다.
상기 평가 장치는, 상기 검출된 형광의 강도에 따라서, 상기 레이저 카테테르의 선단부로부터 조사된 여기광과 상기 조직에 도입된 광감수성 약제와의 반응에 의한 상기 조직의 변화와, 상기 레이저 카테테르의 선단부의 상기 조직에 대한 접촉 상태를 동시에 평가하는 제어부를 더 가져도 된다.
레이저 카테테르로부터 입사한 형광의 강도를 검출함으로써, 여기광과 광감수성 약제와의 반응에 의한 조직의 변화와, 레이저 카테테르의 선단부의 조직에 대한 접촉 상태를 리얼타임으로 평가할 수 있다.
상기 제어부는, 상기 조직의 변화의 최대 평가 결과에 상기 조직의 변화의 현재 평가 결과를 시각적으로 반영하여, 상기 조직의 변화의 평가 결과와, 상기 접촉 상태의 평가 결과를 동시에 통지하기 위한 신호를 출력해도 된다.
여기서, 「신호를 출력」이란, 예를 들면 표시 정보를 포함하는 표시 명령을 표시부로 출력하는 것을 말한다. 이에 의해, 시술자는 조직의 변화의 현재 평가 결과와, 레이저 카테테르 선단부의 접촉 상태를 동시에 직감적으로 인식할 수 있다. 이에 의해, 치료광 조사 중에, 시술자는 심박이나 호흡의 영향 등에 의한 레이저 카테테르 선단부의 어긋남을 리얼타임으로 인식하고, 즉석에서 자세를 제어할 수 있다. 동시에, 시술자는 개체차나 치료 부위에 의해 변동되는 조직의 변화의 평가 결과를 정확하면서 리얼타임으로 파악하여, 시술할 수 있다. 시술자는 시술 중에 복수의 화면을 보고, 모든 것을 판단할 필요가 있다. 이 때문에, 조직의 변화의 현재 평가 결과와, 레이저 카테테르 선단부의 접촉 상태를 직감적으로 인식 가능한 양태로 표시하는 것은, 시술자가 원활한 시술을 행함에 있어서 유용하다.
상기 평가 장치는, 상기 조직의 변화의 최대 평가 결과를 기억하는 기억부를 더 가져도 된다.
상기 제어부는, 상기 조직의 변화의 현재 평가 결과를 상기 기억부에 기록하고, 상기 조직의 변화의 현재 평가 결과가 상기 기억부에 기록된 상기 조직의 변화의 최대 평가 결과 이상일 때, 상기 기억부에 기록된 상기 조직의 변화의 최대 평가 결과를 상기 조직의 변화의 현재 평가 결과에 의해 갱신하고, 상기 갱신한 조직의 변화의 최대 평가 결과에 상기 조직의 변화의 현재 평가 결과를 중첩적으로 표시함으로써 상기 조직의 변화의 평가 결과와 상기 접촉 상태의 평가 결과를 동시에 통지하기 위한 신호를 출력해도 된다.
조직의 변화의 최대 평가 결과에 조직의 변화의 현재 평가 결과를 중첩적으로 표시함으로써, 시술자는 최대 평가 결과와 현재 평가 결과와의 차분을, 레이저 카테테르 선단부의 접촉 상태의 변화로서 직감적으로 인식할 수 있다. 예를 들면, 시술자는 레이저 카테테르 선단부의 접촉 상태가 이상적인 접촉 상태로부터 변화하여, 조직으로부터 어긋나서 혈중에 부유하고 있다고 직감적으로 인식할 수 있다.
상기 평가 장치는, 상기 검출된 형광의 강도에 따라서, 상기 레이저 카테테르의 선단부로부터 조사된 여기광과 상기 조직에 도입된 광감수성 약제와의 반응에 의한 상기 조직의 변화를 평가하는 제어부를 더 가져도 된다.
레이저 카테테르로부터 입사한 형광의 강도를 검출함으로써, 여기광과 광감수성 약제와의 반응에 의한 조직의 변화를 리얼타임으로 평가할 수 있다.
상기 제어부는, 상기 평가 결과에 따라서 상기 조직의 변화를 통지하기 위한 신호를 출력해도 된다.
이에 의해, 레이저 카테테르로부터 입사한 형광의 강도에 따라서, 시술자에게 조직의 변화를 리얼타임으로 통지할 수 있다. 또한, 「신호를 출력」이란, 표시 정보를 포함하는 표시 명령을 표시부로 출력하거나, 음성 출력 명령을 스피커부로 출력하는 것을 말한다.
상기 제어부는 상기 평가 결과에 따라서 상기 여기광의 조사 조건의 변경을 재촉하기 위한 신호를 출력해도 된다.
이에 의해, 레이저 카테테르로부터 입사한 형광의 강도에 따라서, 시술자에게 여기광의 조사 조건의 변경을 리얼타임으로 재촉할 수 있다.
상기 제어부는, 심전 신호를 취득하고, 상기 심전 신호와 상기 형광의 강도의 상관에 따라서 상기 조직의 변화를 평가해도 된다.
심전 신호와 형광의 강도의 상관을 산출함으로써, 조직의 변화를 리얼타임으로 판별할 수 있다.
본 발명의 일 형태에 따른 심방 세동 치료용 평가 장치는, 여기광을 흡수하여 형광을 발하는 광감수성 약제가 도입된 심근 조직에, 레이저 카테테르의 선단부로부터 상기 여기광을 조사하는 장치로서, 접속부와, 광원과, 검출부를 갖는다.
상기 접속부는 상기 레이저 카테테르가 착탈 가능하다.
상기 광원은 상기 접속부를 거쳐서 상기 레이저 카테테르에 상기 여기광을 출력한다.
상기 검출부는 상기 레이저 카테테르의 선단부로부터 조사된 여기광과 상기 심근 조직에 도입된 광감수성 약제와의 반응에 의한 상기 심근 조직의 변화를 평가하기 위해서, 상기 레이저 카테테르로부터 상기 접속부를 거쳐서 입사한 상기 형광의 강도를 검출한다.
레이저 카테테르로부터 입사한 형광의 강도를 검출함으로써, 여기광과 광감수성 약제와의 반응에 의한 조직의 변화를 리얼타임으로 추정할 수 있다. 이에 의해, 레이저 카테테르를 이용한 심방 세동 치료의 진행을 평가할 수 있다. 또한, 심방 세동 치료에 이용하는 레이저 카테테르를 이용함으로써 조작이 간편해진다.
상기 검출부는, 상기 레이저 카테테르의 선단부로부터 조사된 여기광과 상기 심근 조직에 도입된 광감수성 약제와의 반응에 의한 상기 심근 조직의 변화와, 상기 레이저 카테테르의 선단부의 상기 심근 조직에 대한 접촉 상태를 동시에 평가하기 위해서, 상기 레이저 카테테르로부터 상기 접속부를 거쳐서 입사한 상기 형광의 강도를 검출해도 된다.
상기 평가 장치는, 상기 검출된 형광의 강도에 따라서, 상기 레이저 카테테르의 선단부로부터 조사된 여기광과 상기 심근 조직에 도입된 광감수성 약제와의 반응에 의한 상기 심근 조직의 변화와, 상기 레이저 카테테르의 선단부의 상기 심근 조직에 대한 접촉 상태를 동시에 평가하는 제어부를 더 가져도 된다.
상기 제어부는, 상기 심근 조직의 변화의 현재 평가 결과에 상기 심근 조직의 변화의 최대 평가 결과를 시각적으로 반영하여, 상기 조직의 변화의 평가 결과와, 상기 접촉 상태의 평가 결과를 동시에 통지하기 위한 신호를 출력해도 된다.
상기 평가 장치는, 상기 심근 조직의 변화의 최대 평가 결과를 기억하는 기억부를 더 가져도 된다.
상기 제어부는, 상기 심근 조직의 변화의 현재 평가 결과를 상기 기억부에 기록하고, 상기 심근 조직의 변화의 현재 평가 결과가 상기 기억부에 기록된 상기 심근 조직의 변화의 최대 평가 결과 이상일 때, 상기 기억부에 기록된 상기 심근 조직의 변화의 최대 평가 결과를 상기 심근 조직의 변화의 현재 평가 결과에 의해 갱신하고, 상기 갱신한 심근 조직의 변화의 최대 평가 결과에 상기 심근 조직의 변화의 현재 평가 결과를 중첩적으로 표시함으로써 상기 심근 조직의 변화의 평가 결과와 상기 접촉 상태의 평가 결과를 동시에 통지하기 위한 신호를 출력해도 된다.
본 발명의 일 형태에 따른 평가 방법은, 여기광을 흡수하여 형광을 발하는 광감수성 약제가 도입된 조직에, 레이저 카테테르의 선단부로부터 상기 여기광을 조사하는 것을 포함한다.
상기 조사된 여기광에 따른 상기 형광은, 상기 레이저 카테테르를 거쳐서 취출된다.
상기 취출된 형광의 강도에 따라서, 상기 레이저 카테테르의 선단부로부터 조사된 여기광과 상기 조직에 도입된 광감수성 약제와의 반응에 의한 상기 조직의 변화가 평가된다.
레이저 카테테르로부터 입사한 형광의 강도를 검출함으로써, 여기광과 광감수성 약제와의 반응에 의한 조직의 변화를 리얼타임으로 추정할 수 있다. 이에 의해, 레이저 카테테르를 이용한 치료의 진행을 평가할 수 있다.
상기 평가 방법은, 상기 취출된 형광의 강도에 따라서, 상기 레이저 카테테르의 선단부로부터 조사된 여기광과 상기 조직에 도입된 광감수성 약제와의 반응에 의한 상기 조직의 변화와, 상기 레이저 카테테르의 선단부의 상기 조직에 대한 접촉 상태를 동시에 평가해도 된다.
상기 평가 방법은, 상기 조직의 변화의 최대 평가 결과에 상기 조직의 변화의 현재 평가 결과를 시각적으로 반영하여, 상기 조직의 변화의 평가 결과와, 상기 접촉 상태의 평가 결과를 동시에 통지하기 위한 신호를 더 출력해도 된다.
상기 평가 방법은, 상기 조직의 변화의 현재 평가 결과를 기억부에 기록하고, 상기 조직의 변화의 현재 평가 결과가 상기 기억부에 기록된 상기 조직의 변화의 최대 평가 결과 이상일 때, 상기 기억부에 기록된 상기 조직의 변화의 최대 평가 결과를 상기 조직의 변화의 현재 평가 결과에 의해 갱신하고, 상기 갱신한 조직의 변화의 최대 평가 결과에 상기 조직의 변화의 현재 평가 결과를 중첩적으로 표시함으로써 상기 조직의 변화의 평가 결과와 상기 접촉 상태의 평가 결과를 동시에 통지하기 위한 신호를 출력해도 된다.
상기 평가 방법은, 심전 신호를 취득하고, 상기 심전 신호와 상기 형광의 강도의 상관에 따라서 상기 조직의 변화를 평가해도 된다.
심전 신호와 형광의 강도의 상관을 산출함으로써, 여기광과 광감수성 약제와의 반응에 의한 조직의 변화를 리얼타임으로 판별할 수 있다.
본 발명의 일 형태에 따른 평가 방법은, 여기광을 흡수하여 형광을 발하는 광감수성 약제와, 선단부로부터 상기 여기광을 조사 가능한 레이저 카테테르와, 상기 레이저 카테테르가 착탈 가능한 접속부 및 상기 접속부를 거쳐서 상기 레이저 카테테르에 상기 여기광을 출력하는 광원을 갖는 평가 장치를 사용하는 평가 방법이다.
상기 광감수성 약제는, 조직에 도입된다.
상기 접속부에 장착되는 상기 레이저 카테테르의 선단부가 상기 광감수성 약제를 도입한 조직으로 유도된다.
상기 광감수성 약제를 도입한 조직에 대하여 상기 레이저 카테테르의 선단부로부터, 상기 광원으로부터 출력된 여기광이 조사된다.
상기 조사된 여기광에 따른 상기 형광이 상기 레이저 카테테르를 거쳐서 취출된다.
상기 취출된 형광의 강도에 따라서, 상기 레이저 카테테르의 선단부로부터 조사된 여기광과 상기 조직에 도입된 광감수성 약제와의 반응에 의한 상기 조직의 변화가 평가된다.
상기 평가 방법은, 상기 취출된 형광의 강도에 따라서, 상기 레이저 카테테르의 선단부로부터 조사된 여기광과 상기 조직에 도입된 광감수성 약제와의 반응에 의한 상기 조직의 변화와, 상기 레이저 카테테르의 선단부의 상기 조직에 대한 접촉 상태를 동시에 평가해도 된다.
상기 평가 방법은, 상기 조직의 변화의 최대 평가 결과에 상기 조직의 변화의 현재 평가 결과를 시각적으로 반영하여, 상기 조직의 변화의 평가 결과와, 상기 접촉 상태의 평가 결과를 동시에 통지하기 위한 신호를 더 출력해도 된다.
상기 평가 방법은, 상기 조직의 변화의 현재 평가 결과를 기억부에 기록하고, 상기 조직의 변화의 현재 평가 결과가 상기 기억부에 기록된 상기 조직의 변화의 최대 평가 결과 이상일 때, 상기 기억부에 기록된 상기 조직의 변화의 최대 평가 결과를 상기 조직의 변화의 현재 평가 결과에 의해 갱신하고, 상기 갱신한 조직의 변화의 최대 평가 결과에 상기 조직의 변화의 현재 평가 결과를 중첩적으로 표시함으로써 상기 조직의 변화의 평가 결과와 상기 접촉 상태의 평가 결과를 동시에 통지하기 위한 신호를 출력해도 된다.
상기 평가 방법은, 심전 신호를 취득하고, 상기 심전 신호와 상기 형광의 강도의 상관에 따라서 상기 조직의 변화를 평가해도 된다.
본 발명에 따르면, 레이저 카테테르를 이용한 치료의 진행을 정확하면서 리얼타임으로 평가할 수 있어, 치료의 확실성을 담보할 수 있다.
도 1은 본 발명의 제1 실시 형태에 따른 PDT 장치를 도시하는 모식도.
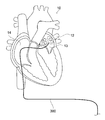
도 2는 심장에 삽입된 레이저 카테테르를 도시하는 모식도.
도 3은 PDT 장치 본체를 도시하는 블록도.
도 4는 레이저 카테테르의 선단부를 도시하는 단면도.
도 5는 PDT 장치의 동작을 나타내는 플로우차트.
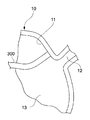
도 6은 좌심방에 삽입된 레이저 카테테르를 도시하는 모식도.
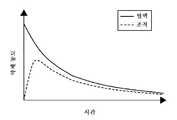
도 7은 형광 강도의 경시 변화를 나타내는 그래프.
도 8은 형광 강도와 약제 농도의 상관을 나타내는 그래프.
도 9는 약제 농도의 경시 변화를 나타내는 그래프.
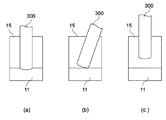
도 10은 레이저 카테테르의 접촉 상태를 도시하는 모식도.
도 11은 형광 강도의 경시 변화를 나타내는 그래프.
도 12는 형광 강도의 경시 변화를 나타내는 다른 그래프.
도 13은 레이저 카테테르의 이동의 궤적을 도시하는 모식도.
도 14는 ECG와 심강 내압, 심근 조직의 혈류량을 지배하는 관상 동맥 혈류량의 관계를 도시하는 도면이다.
도 15는 레이저 카테테르가 수직 접촉 상태일 때의 형광 강도와 R파의 상관을 도시하는 도면.
도 16은 레이저 카테테르가 경사 접촉 상태일 때의 형광 강도와 R파의 상관을 도시하는 도면.
도 17은 본 발명의 제2 실시 형태의 광학계 및 검출부 등을 도시하는 블록도.
도 18은 혈관 내강에서의 레이저 카테테르의 접촉 상태를 도시하는 모식도.
도 19는 파장과 형광 강도의 관계를 나타내는 그래프.
도 20은 PDT 장치의 동작을 나타내는 플로우차트.
도 21은 형광 강도의 경시 변화를 나타내는 그래프.
도 22는 PDT 진행도 및 접촉 상태의 모니터 동작을 나타내는 플로우차트.
도 23은 PDT 진행도를 산출하기 위한 수식을 설명하기 위한 도면.
도 24는 PDT 진행도의 산출 방법을 설명하기 위한 도면.
도 25는 약제 투여 시의 농도와 조사 파워를 설정하기 위한 수식을 나타내는 도면.
도 26은 도 23의 수식에 기초하여 산출된 PDT 진행도를 나타내는 그래프.
도 27은 도 26의 변형예를 나타내는 그래프.
도 28은 PDT 진행도 및 레이저 카테테르 선단의 접촉 상태를 표시하는 표시 화면.
도 29는 PDT 진행도 및 레이저 카테테르 선단의 접촉 상태를 표시하는 다른 표시 화면.
도 30은 PDT 진행도 및 레이저 카테테르 선단의 접촉 상태를 표시하는 다른 표시 화면.
도 31은 PDT 진행도 및 레이저 카테테르 선단의 접촉 상태를 표시하는 다른 표시 화면.
도 32는 PDT 진행도 및 레이저 카테테르 선단의 접촉 상태를 표시하는 다른 표시 화면.
도 33은 레이저 카테테르 선단의 조직 내벽에 대한 접촉도를 산출하기 위한 수식을 나타내는 도면.
도 34는 이 접촉도의 산출 방법을 설명하기 위한 도면.
도 35는 접촉도의 시간 파형 표시 및 레벨 미터 표시를 나타내는 표시 화면.
도 36은 도 35에 도시하는 서로 다른 복수의 접촉도에 있어서의 레이저 카테테르의 접촉 상태를 도시하는 모식도.
도 2는 심장에 삽입된 레이저 카테테르를 도시하는 모식도.
도 3은 PDT 장치 본체를 도시하는 블록도.
도 4는 레이저 카테테르의 선단부를 도시하는 단면도.
도 5는 PDT 장치의 동작을 나타내는 플로우차트.
도 6은 좌심방에 삽입된 레이저 카테테르를 도시하는 모식도.
도 7은 형광 강도의 경시 변화를 나타내는 그래프.
도 8은 형광 강도와 약제 농도의 상관을 나타내는 그래프.
도 9는 약제 농도의 경시 변화를 나타내는 그래프.
도 10은 레이저 카테테르의 접촉 상태를 도시하는 모식도.
도 11은 형광 강도의 경시 변화를 나타내는 그래프.
도 12는 형광 강도의 경시 변화를 나타내는 다른 그래프.
도 13은 레이저 카테테르의 이동의 궤적을 도시하는 모식도.
도 14는 ECG와 심강 내압, 심근 조직의 혈류량을 지배하는 관상 동맥 혈류량의 관계를 도시하는 도면이다.
도 15는 레이저 카테테르가 수직 접촉 상태일 때의 형광 강도와 R파의 상관을 도시하는 도면.
도 16은 레이저 카테테르가 경사 접촉 상태일 때의 형광 강도와 R파의 상관을 도시하는 도면.
도 17은 본 발명의 제2 실시 형태의 광학계 및 검출부 등을 도시하는 블록도.
도 18은 혈관 내강에서의 레이저 카테테르의 접촉 상태를 도시하는 모식도.
도 19는 파장과 형광 강도의 관계를 나타내는 그래프.
도 20은 PDT 장치의 동작을 나타내는 플로우차트.
도 21은 형광 강도의 경시 변화를 나타내는 그래프.
도 22는 PDT 진행도 및 접촉 상태의 모니터 동작을 나타내는 플로우차트.
도 23은 PDT 진행도를 산출하기 위한 수식을 설명하기 위한 도면.
도 24는 PDT 진행도의 산출 방법을 설명하기 위한 도면.
도 25는 약제 투여 시의 농도와 조사 파워를 설정하기 위한 수식을 나타내는 도면.
도 26은 도 23의 수식에 기초하여 산출된 PDT 진행도를 나타내는 그래프.
도 27은 도 26의 변형예를 나타내는 그래프.
도 28은 PDT 진행도 및 레이저 카테테르 선단의 접촉 상태를 표시하는 표시 화면.
도 29는 PDT 진행도 및 레이저 카테테르 선단의 접촉 상태를 표시하는 다른 표시 화면.
도 30은 PDT 진행도 및 레이저 카테테르 선단의 접촉 상태를 표시하는 다른 표시 화면.
도 31은 PDT 진행도 및 레이저 카테테르 선단의 접촉 상태를 표시하는 다른 표시 화면.
도 32는 PDT 진행도 및 레이저 카테테르 선단의 접촉 상태를 표시하는 다른 표시 화면.
도 33은 레이저 카테테르 선단의 조직 내벽에 대한 접촉도를 산출하기 위한 수식을 나타내는 도면.
도 34는 이 접촉도의 산출 방법을 설명하기 위한 도면.
도 35는 접촉도의 시간 파형 표시 및 레벨 미터 표시를 나타내는 표시 화면.
도 36은 도 35에 도시하는 서로 다른 복수의 접촉도에 있어서의 레이저 카테테르의 접촉 상태를 도시하는 모식도.
이하, 도면을 참조하면서, 본 발명의 실시 형태를 설명한다. 본 실시 형태에서는, 평가 장치로서 광선 역학적 치료 장치(이하, 「PDT 장치」라 기술함)를 이용하는 것으로서 설명한다.
<제1 실시 형태>
도 1은 본 발명의 제1 실시 형태에 따른 PDT 장치를 도시하는 모식도이다.
PDT 장치(1)는 PDT 장치 본체(100)와, PDT 장치 본체(100)에 접속된 튜브(200)와, 튜브(200)의 선단에 설치된 커넥터(210)를 갖는다.
튜브(200)는, 중공의 부드러운 관이며, 내장하는 장치 부속 광 파이버(201)(도 3 참조)를 거쳐서 광을 전송할 수 있다.
커넥터(210)에는, 레이저 카테테르(300)가 착탈 가능하게 접속된다.
환자(2)에게는, 광감수성 약제가 투여된다. 정맥 주사에 의해 투여한 경우, 투여된 광감수성 약제는 혈액 중으로 확산하고, 또한 심근 조직 등의 조직에 도입된다. 광감수성 약제는, 정맥 주사에 의해 치료에 필요한 분량을 일괄 투여하거나, 점적에 의해 계속적으로 투여하거나, 경구로부터 일괄 또는 계속적으로 투여하거나, 국소 투여해도 된다. 광감수성 약제란, 광의 특정 파장을 흡수하여 여기하고, 형광을 발하는 약제이다. 예를 들면, 타라포르핀 나트륨(레저피린(등록상표), 메이지세이까 가부시끼가이샤)이라고 하는 약제가 있다. 이 약제의 Q대 흡수 파장은 664㎚ 전후로 존재하기 때문에, 이 약제의 여기광원으로서는, 예를 들면 600-800㎚, 바람직하게는 660-680㎚, 더욱 바람직하게는 664±2㎚를 이용한다.
도 2는 심장에 삽입된 레이저 카테테르를 도시하는 모식도이다.
레이저 카테테르(300)는, 환자(2)의 대퇴정맥 또는 경정맥을 통과하여, 심장(10)의 우심방(14)에 삽입된다. 우심방(14)에 도달한 레이저 카테테르(300)는, 중격을 관통하여 좌심방(13)으로 유도된다.
[PDT 장치 본체의 구성]
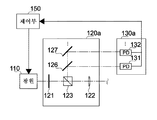
도 3은 PDT 장치 본체를 도시하는 블록도이다.
PDT 장치 본체(100)는, 광원(110)과, 광학계(120)와, 검출부(130)와, 심전 취득부(140)와, 제어부(150)와, 기억부(160)와, 표시부(170)와, 조작부(180)를 갖는다.
광원(110)은 광감수성 약제의 여기광을 출력한다. 광원(110)이 출력하는 광의 파장은, 광감수성 약제의 Q대의 흡수 파장과 동일하다. 예를 들면 Q대 흡수 파장이 664㎚ 전후의 광감수성 약제가 이용될 때, 광원(110)으로서 발진 파장 600-800㎚, 바람직하게는 660-680㎚, 더욱 바람직하게는 664±2㎚의 반도체 레이저가 사용된다. 광원(110)이 출력한 여기광은, 광학계(120)에 의해 레이저 카테테르(300)로 입사한다.
광학계(120)는, 광원(110)이 발하는 여기광을, 장치 부속 광 파이버(201)를 거쳐서 커넥터(210)에 접속된 레이저 카테테르(300)로 입사한다. 광학계(120)는, 여기광이 조사된 광감수성 약제가 발하는 형광을 레이저 카테테르(300)로부터 취출하고, 검출부(130)에 입사한다. 광학계(120)는, 숏 패스 필터(121)와, 제1 렌즈(122)와, 편광 빔 스플리터(Polarizing Beam Splitter, 이하 「PBS」라 기술함)(123)와, 롱 패스 필터(124)와, 제2 렌즈(125)를 갖는다.
숏 패스 필터(121)는 컷트 온 파장 670㎚의 단파장 투과 필터이며, 장파측의 복사를 커트한다. 광원(110)으로부터의 여기광은 형광 관찰 파장 영역(피크 파장보다도 장파측)에 복사 성분을 갖는다. 따라서, 여기광의 장파측의 복사 성분을, 레이저 카테테르(300)에 집광하기 전 단계에서 커트한다. 숏 패스 필터(121)를 투과한 여기광은, 제1 렌즈(122)에 입사한다.
제1 렌즈(122)는, 숏 패스 필터(121)로부터 입사한 여기광을 레이저 카테테르(300)의 일단면에 집광한다. 또한, 제1 렌즈(122)는 레이저 카테테르(300)의 선단부로부터의 형광을 PBS(123)에 집광한다. 또한, 광원(110)으로부터의 여기광의 일부는, 장치 부속 광 파이버(201)의 PDT 장치 본체(100)측 단부면이나, 커넥터(210) 내나, 레이저 카테테르(300)의 선단부에서 반사하여 정반사광으로서PBS(123)에 입사한다. 이들 정반사광은, 형광의 검출에 있어서 노이즈가 된다.
PBS(123)는 제1 렌즈(122)로부터 입사한 광 중, 편향의 차이를 이용하여 튜브(200) 내의 광 파이버의 단부면에서 반사한 정반사광을 투과시켜서 검출하지 않고, 형광과 그 밖의 단부면에 있어서의 정반사광을 반사하여 검출기로 유도한다. PBS(123)를 투과한 형광은, 롱 패스 필터(124)에 입사한다.
롱 패스 필터(124)는 PBS(123)로부터 입사한 광 중, 커넥터(210) 내 및 레이저 카테테르(300)의 선단부에서 반사한 정반사광을 투과하지 않고, 형광만을 투과하여 검출기로 유도한다. 롱 패스 필터(124)를 투과한 형광은, 제2 렌즈(125)에 입사한다.
제2 렌즈(125)는 롱 패스 필터(124)로부터 입사한 형광을 검출부(130)에 집광한다.
검출부(130)는, 예를 들면 리니어 이미지 센서이며, 광학계(120)로부터 입사한 형광을 분광 검출한다. 즉, 검출부(130)는 여기 파장의 광과 여기 파장의 광보다 긴 광인 광감수성 약제의 형광을 검출한다. 검출부(130)는 검출한 형광의 강도를 전기 신호로서 제어부(150)에 출력한다.
심전 취득부(140)에는, 전극 코드(도시 생략)를 거쳐서 전극 패드(141)가 접속된다. 심전 취득부(140)는 환자(2)에게 장착된 전극 패드(141)와 전극 코드를 거쳐서 환자(2)의 심전 신호를 취득하고, 취득한 심전 신호를 제어부(150)에 공급한다.
제어부(150)는 PDT 장치(1) 내의 각 부를 제어한다.
제어부(150)는 검출부(130)로부터 취득한 전기 신호를 바탕으로, 형광 강도를 산출한다. 제어부(150)는 산출한 형광 강도를 바탕으로, 조직 중이나 혈중의 약제 농도를 산출한다(약제 농도 모니터 동작). 제어부(150)는 산출한 약제 농도를 바탕으로, 약제 추가 투여의 필요 여부를 판별한다.
제어부(150)는 검출부(130)로부터 취득한 전기 신호를 바탕으로, 레이저 카테테르(300)의 조직에 대한 접촉 상태를 판별한다(접촉 모니터 동작).
제어부(150)는 여기광 조사 중의 형광 강도의 변화를 바탕으로, 이물, 파손 등의 이상의 유무나 살세포 효과를 판별한다(이물·파손 모니터 동작 및 살세포 효과 판별 동작). 제어부(150)는 판별 결과를 바탕으로, 광원(110)을 제어하여 여기광 조사를 정지시킨다.
제어부(150)는 검출부(130)로부터 취득한 전기 신호와 심전 취득부(140)로부터 취득한 심전 신호를 바탕으로, 전기 전도 블록의 형성의 유무를 판별한다(전기 전도 블록 형성의 판별 동작).
제어부(150)는 상기 각종 산출 결과 및 판별 결과나 여러 정보를 표시하기 위한 표시 명령을 표시부(170)에 출력한다.
기억부(160)는 불휘발성 메모리이며, 예를 들면 플래시 메모리, HDD(Hard Disk Drive), 그 외의 고체 메모리에 설정된다. 제어부(150)는 검출부(130)로부터 취득한 형광 강도에 관한 정보와, 여기광 조사를 개시한 시각 등의 기준 시각으로부터의 경과 시간 등을 계측하는 시간 계측부(도시 생략)로부터 취득한 시간 정보를 서로 관련지어, 형광 강도의 경시 변화로서 기억부(160)에 기록한다. 제어부(150)는 심전 취득부(140)로부터 취득한 심전 신호에 관한 정보와 시간 정보를 서로 관련지어, 심전도로서 기억부(160)에 기록한다.
표시부(170)는 예를 들면 액정 표시기 등을 이용한 표시 디바이스이다. 표시부(170)는 제어부(150)로부터 표시 명령을 취득하면, 표시 명령에 포함되는 표시 정보에 기초하여, 예를 들면 형광 강도에 관한 정보, 심전 신호에 관한 정보 및 시간 정보 등을 표시 화면에 표시한다.
조작부(180)는, 시술자로부터의 입력 조작에 의한 명령을 접수하고, 접수한 명령을 제어부(150)에 출력한다. 명령이란, 예를 들면 광원(110)이 출력하는 여기광의 온·오프나 강도의 전환 등에 관한 명령이다. 여기광의 강도는, 적어도, 조직이나 혈액에 대해 저침습의 저파워(예를 들면, 광출력 1㎽ 이하)의 제1 강도와, 제1 강도의 대략 1000배 정도인 강도의 고파워의 제2 강도의 2종류를 선택할 수 있다. 제1 강도는, 치료 전에, 약제 농도나 레이저 카테테르(300)의 접촉 상태를 모니터할 때에 선택된다. 제2 강도는, 치료를 행할 때에 선택된다. 또한, 제1 강도는 고정값이며, 제2 강도는 가변해도 된다.
[레이저 카테테르의 구성]
레이저 카테테르(300)는, 선단부로부터 여기광을 출사한다.
도 4는 레이저 카테테르의 선단부를 도시하는 단면도이다.
레이저 카테테르(300)는 카테테르 튜브(310)와, 지지부(320)와, 광 파이버(330)와, 광학 윈도우(340)를 갖는다.
카테테르 튜브(310)는 중공의 부드러운 관이며, 환자(2)의 심장(10)의 심근 조직의 내벽으로 유도된다. 카테테르 튜브(310)는, 광 파이버(330)를 내장한다.
지지부(320)는, 카테테르 튜브(310)에 고정된다. 지지부(320)는 광 파이버(330) 및 광학 윈도우(340)를 카테테르 튜브(310)에 대해 보유지지한다.
광 파이버(330)는, 예를 들면 코어 직경 133㎛, 또한 외형 500㎛인 1개의 석영제 스텝 인덱스 파이버이다. 광 파이버(330)는 PDT 장치(1)로부터의 여기광을 전송한다. 광 파이버(330)는 선단으로부터, 전송한 여기광을 조사광(301)으로서 광학 윈도우(340)로 출사한다. 조사광(301)의 빔 직경은, 광 파이버(330)의 개구(NA)에서 정해지는 각도로 증대한다. 광 파이버(330)의 선단은, 이 조사광(301)의 빔 직경이 적절하게 증대하도록 가공된다. 광 파이버(330)는, 여기광이 조사된 조직에 도입된 광감수성 약제가 발한 형광을 PDT 장치(1)로 전송한다.
광학 윈도우(340)는, 레이저 카테테르(300)의 선단부의 최외부에 광 파이버(330)의 선단과 광학적으로 연속하여 설치된다. 광학 윈도우(340)는 고형의 투명 재료, 예를 들면 BK7 등의 유리 재료로 이루어진다. 광학 윈도우(340)는 조사부로서 광 파이버(330)의 선단으로부터 출사한 조사광(301)을 투과시킨다. 광학 윈도우(340)는 수광부로서 광감수성 약제가 발한 형광을 광 파이버(330)의 선단에 집광한다.
SN(Signal-Noise)비가 높은 형광 검출을 행하기 위해서는, 정반사광을 제거하기 위해, 레이저 카테테르에 조사 파이버 및 검출 파이버를 독립적으로 설치하여 조사 및 수광을 행하는 방법이 알려져 있다(일본 특허 출원 공개 제2009-148550단락 [0037] 참조).
한편, 심강 내의 치료나 진단을 행할 때, 레이저 카테테르의 곡률을 확보하기 위해서, 레이저 카테테르의 직경은 작은 것이 바람직하다. 복수의 광 파이버를 레이저 카테테르에 설치하기 위해서는, 각각의 광 파이버를 아주 가늘게 형성하게 되어, 필요한 강도의 광을 전송할 수 없게 될 우려가 있다.
이상으로부터, 특히 심방 세동이나 심실 조동 등의 심강 내로부터의 어프로치를 필요로 하는 질환에서는, 레이저 카테테르에 내장하는 광 파이버는 1개인 것이 바람직하다. 또한, 생체에 영향을 주지 않을 정도의 저파워의 강도로의 형광 검출이 필요해지기 때문에, SN(Signal-Noise)비가 높은 계측계를 1개의 광 파이버로 구성할 필요가 있다.
따라서, 본 실시 형태의 PDT 장치(1)에 따르면, PBS(123) 및 롱 패스 필터(124)가 파이버 입사 단부면의 정반사광을 제거하고, 또한 숏 패스 필터(121)가 여기광의 장파측의 복사 성분을 제거한다. 이에 의해, 레이저 카테테르(300)에서 조사 파이버와 검출 파이버를 1개의 광 파이버(330)로 겸용하면서도, 검출부(130)는 고SN비로 형광을 검출할 수 있다. 이 결과, 생체에 영향을 미치지 않을 정도의 저파워로 형광을 검출할 수 있다. 이에 의해, 순환기계의 질환의 치료 및 진단에 있어서, 충분히 가늘어서 곡률을 확보할 수 있는 레이저 카테테르이면서도, 저침습의 진단이 가능하다.
[PDT 장치의 동작]
다음으로, 이상과 같이 구성된 PDT 장치(1)의 동작에 대하여 설명한다.
도 5는 PDT 장치의 동작을 나타내는 플로우차트이다.
PDT 장치(1)의 동작의 설명은, 이하의 (1) 내지 (6)의 순서로 행하는 것으로 한다.
(1) PDT의 준비(스텝 S101 ~ 스텝 S103)
(2) 약제 농도 모니터 동작(스텝 S104 ~ 스텝 S105)
약제 농도 모니터 동작에서는, 광원(110)은 제1 강도로 여기광을 출력하고, 제어부(150)는 검출부(130)가 검출하는 형광 강도를 바탕으로 약제 농도를 경시적으로 산출하고, 산출한 약제 농도를 바탕으로 약제 추가 투여의 필요 여부를 판별한다.
(3) 접촉 모니터 동작(스텝 S106 ~ 스텝 S108)
접촉 모니터 동작에서는, 광원(110)은 제1 강도로 여기광을 출력하고, 제어부(150)는 검출부(130)가 검출하는 형광 강도를 바탕으로 레이저 카테테르(300)의 조직 내벽에 대한 접촉 상태를 판별하고, 여기광 조사 프로토콜(강도, 시간 등)의 산출을 행한다.
(4) 이물·파손 모니터 동작(스텝 S109 ~ 스텝 S112)
이물·파손 모니터 동작에서는, 광원(110)은 제2 강도로 여기광을 출력하고, 제어부(150)는 검출부(130)가 검출하는 형광 강도를 바탕으로 적절한 치료 프로토콜에서, 레이저 조사 중에 어떠한 이유로 이물이 레이저 카테테르(300) 선단에 부착되는지의 여부, 또한 레이저 카테테르(300) 선단 부근의 파손이 있는지 없는지를 판별한다.
(5) 살세포 효과 판별 동작(스텝 S113)
살세포 효과 판별 동작에서는, 광원(110)은 제2 강도로 여기광을 출력하고, 제어부(150)는 검출부(130)가 검출하는 형광 강도를 바탕으로, 여기광이 조사되고 있는 조직에서 살세포 효과가 있는지의 여부를 판별한다.
(6) 전기 전도 블록 형성의 판별 동작(스텝 S114 ~ 스텝 S117)
전기 전도 블록이란, 이미 설명한 바와 같이 이상 흥분 부위를 둘러싸는 심근 조직을 괴사시켜서, 이상 흥분 부위로부터 좌심방으로의 전기 펄스의 전도를 차단한 블록이다. 여기서 전기 전도 블록 형성의 판별 동작은, 살세포 효과 판별 동작(스텝 S113)에서 이용한 형광 강도의 시간 변화의 데이터와, 심전 파형의 데이터를 제어부에서 연산함으로써 판별한다. 경우에 따라서는, 레이저 카테테르를 전기 전도 블록 내에 재배치하고, 광원(110)을 제1 강도로 변경하여, 마찬가지의 처리를 행함으로써 전기 전도 블록의 형성을 판별해도 된다.
[(1)PDT의 준비]
도 6은 좌심방에 삽입된 레이저 카테테르를 도시하는 모식도이다.
우선, 의사 등의 시술자에 의해, 레이저 카테테르(300)가 환자(2)의 대퇴정맥 또는 경정맥을 통과하여 심장(10)에 삽입된다. 레이저 카테테르(300)의 선단부는, 좌심방(13)의 심근 조직(11) 내벽의 폐정맥(12) 근방에 배치된다(스텝 S101).
계속해서, 시술자에 의해 각종 기준 데이터를 참고하여(스텝 S102), 환자(2)에게 광감수성 약제가 투여된다(스텝 S103). 여기에서는, 정맥 주사에 의해 치료에 필요한 분량의 광감수성 약제가 환자(2)에게 일괄 투여되는 것으로서 설명한다. 투여된 광감수성 약제는 혈액으로 확산 및 조직에 도입된다.
[(2)약제 농도 모니터 동작]
계속해서, 약제 농도 모니터 동작이 행해진다.
우선, 시술자는 조작부(180)를 조작하여 저파워의 제1 강도로의 여기광 출력 명령을 제어부(150)에 입력한다. 제어부(150)는 여기광 출력 명령을 취득하면, 광원(110)에 제1 강도로의 여기광 출력 명령을 출력한다. 광원(110)은 제어부(150)로부터 여기광 출력 명령을 취득하면, 제1 강도로 여기광을 출력한다. 광원(110)이 출력한 여기광은, 광학계(120) 및 레이저 카테테르(300)를 거쳐서 조직이나 혈액으로 조사된다. 조직이나 혈액에 도입된 광감수성 약제는 레이저 카테테르(300)로부터의 여기광을 흡수하여 형광을 발한다. 광감수성 약제가 발한 형광은 레이저 카테테르(300)를 거쳐서 광학계(120)에 의해 취출되어 검출부(130)에 입사된다. 검출부(130)는, 입사한 형광을 검출하고, 검출한 형광의 강도를 전기 신호로서 제어부(150)에 출력한다.
제어부(150)는 검출부(130)로부터 취득한 전기 신호를 바탕으로, 형광 강도를 산출한다. 제어부(150)는 산출한 형광 강도를 시간 계측부(도시하지 않음)로부터 취득한 시간 정보에 관련된 로그로서, 형광 강도의 경시 변화를 기억부(160)에 기록하기 시작한다. 제어부(150)는 산출한 형광 강도와, 정맥 주사를 개시한 시각 등의 기준 시각으로부터의 경과 시간을 바탕으로, 형광 강도의 경시 변화에 관한 표시 정보를 생성하고, 생성한 표시 정보를 포함하는 표시 명령을 표시부(170)에 출력한다. 표시부(170)는 제어부(150)로부터 표시 명령을 취득하면, 표시 명령에 포함되는 표시 정보에 기초하여, 형광 강도의 경시 변화를 표시 화면에 표시한다. 예를 들면, 표시부(170)는 형광 강도의 경시 변화를 그래프로서 표시 화면에 표시한다.
여기서, 형광 강도의 경시 변화를 나타내는 그래프의 일례에 대하여 설명한다.
도 7은 형광 강도의 경시 변화를 나타내는 그래프이다.
이 도면은 광감수성 약제(레저피린)을 돼지에 정맥 주사(intravenous injection, i.v.)하고, 약제의 흡수 스펙트럼의 Q대에 일치하는 여기광(반도체 레이저, 발진 파장 예를 들면 600-800㎚, 바람직하게는 660-680㎚, 더욱 바람직하게는 664±2㎚, 400㎼)을 조사했을 때의 형광 강도(Intensity)의 경시 변화를 나타낸다. 레이저 카테테르(300)의 선단부는 돼지 우심방 내에 배치하였다.
혈액에서의 형광 강도는, 약제 투여 후, 단조 감소하였다. 한편, 심근 조직에서의 형광 강도는, 약제 투여 후, 일정 시간까지는 증가하고, 그 후 감소하였다. 또한, 혈액에서의 형광 강도는 심근 조직에서의 형광 강도보다 크다.
여기서, 형광 강도와 약제 농도의 관계에 대하여 설명한다.
도 8은 형광 강도와 약제 농도의 상관을 나타내는 그래프이다.
이 도면은, 채혈법에 의해 얻어진 약제 농도(PS concentration)의 절대값과, 전의 도면에 도시하는 여기광을 혈액에 조사했을 때의 형광 강도(Intensity)의 상관을 나타낸다. 약제 농도의 절대값과 형광 강도는 거의 일치하였다. 즉, 경시적으로 산출된 형광 강도를 바탕으로, 리얼타임으로 약제 농도를 모니터할 수 있다.
제어부(150)는 산출한 형광 강도를 바탕으로, 조직이나 혈액 중의 약제 농도를 산출한다(스텝 S104). 제어부(150)는 산출한 약제 농도를 시간 계측부(도시하지 않음)로부터 취득한 시간 정보에 관련된 로그로서, 약제 농도의 경시 변화를 기억부(160)에 기록하기 시작한다. 제어부(150)는 또한 산출한 약제 농도와, 정맥 주사를 개시한 시각 등의 기준 시각으로부터의 경과 시간을 바탕으로, 약제 농도의 경시 변화에 관한 표시 정보를 생성하고, 생성한 표시 정보를 포함하는 표시 명령을 표시부(170)로 출력한다. 표시부(170)는 제어부(150)로부터 표시 명령을 취득하면, 표시 명령에 포함되는 표시 정보에 기초하여, 약제 농도의 경시 변화를 표시 화면에 표시한다. 예를 들면, 표시부(170)는 약제 농도의 경시 변화를 그래프로서 표시 화면에 표시한다.
여기서, 약제 농도의 경시 변화를 나타내는 그래프의 일례에 대하여 설명한다.
도 9는 약제 농도의 경시 변화를 나타내는 그래프이다.
전술한 바와 같이, 혈액에서의 형광 강도는 심근 조직에서의 형광 강도보다 크고, 또한 형광 강도와 약제 농도에는 상관이 있다. 따라서, 혈중의 약제 농도는 혈중의 형광 강도의 경시 변화와 마찬가지로, 약제 투여 후 단조 감소한다. 한편, 조직 중에서의 약제 농도는, 조직 중의 형광 강도의 경시 변화와 마찬가지로, 약제 투여 후 일정 시간까지는 증가하고, 그 후 감소한다. 또한, 혈중의 약제 농도는 조직 중의 약제 농도보다 높은 레벨을 나타내게 된다.
제어부(150)는 산출한 약제 농도가 임계값 이상인지의 여부를 판별한다(스텝 S105). 제어부(150)는 약제 농도가 임계값 이상이라고 판별하면, 약제 농도가 충분하다고 추정하여, 접촉 모니터 동작으로 이행한다(스텝 S105에서 예). 한편, 제어부(150)는 약제 농도가 임계값 미만이라고 판별하면, 약제 농도가 불충분하다고 추정하여, 약제 추가 투여를 재촉하는 표시 정보를 생성하고, 생성한 표시 정보를 포함하는 표시 명령을 표시부(170)에 출력한다. 표시부(170)는 제어부(150)로부터 표시 명령을 취득하면, 표시 명령에 포함되는 표시 정보에 기초하여, 시술자에게 광감수성 약제의 추가 투여를 재촉하는 정보를 표시한다(스텝 S105에서 아니오).
또한, 형광 강도와 약제 농도에는 상관이 있으므로, 형광 강도를 표시부(170)에 의해 표시 화면에 표시하면, 제어부(150)에 의해 약제 농도를 산출하지 않아도, 의사 등의 시술자는 형광 강도로부터 약제 농도를 추정할 수 있다.
그런데, 일반적으로, 혈중의 약제 농도 변화를 모니터하는 방법으로서는, 약제 투여 후부터 일정 시간마다 채혈한 혈액의 흡광도를 계측하는 방법이 알려져 있다. 그러나, 이 방법은, 채혈 가능한 혈액량이 한정되어 있기 때문에 플롯수가 제한되고, 또한 리얼타임으로는 농도를 계측할 수 없다.
또는 체외에 바이패스 경로를 제작하고, 그 경로를 통과하는 혈액에 대하여 광을 조사하고, 형광 강도를 관찰함으로써 모니터하는 방법이 알려져 있다. 그러나, 이 방법은, 위생면에 유의할 필요가 있다.
또한, 조직 중의 약제 농도를 모니터하는 방법으로서는, 약제를 구성하는 일부 탄소를 동위체로 변환한 것을 동시에 투여하고, 방사선량으로부터 각 조직의 약제 농도를 모니터하는 방법이 알려져 있다(CANCER RESEARCH 50.3985-3990, July 1, 1990, Tissue Distribution and Photosensitizing Properties of Mono-L-aspartyl Chlorin e6 in a Mouse Tumor Model, Charles J. Corner and Angela Ferrario). 그러나, 이 방법으로는, 피폭의 문제와, 매크로적인 농도밖에 모니터할 수 없다고 하는 문제가 있다.
이에 반해, 본 실시 형태의 약제 농도 모니터 동작에 따르면, 형광 강도의 경시 변화를 산출함으로써, 형광 강도에 상관이 있는 약제 농도의 경시 변화를 산출할 수 있다. 이에 의해, 조직 및 혈액 중의 약제 농도를 리얼타임으로 모니터할 수 있다. 또한, 상기 종래의 모니터 방법에 비해, 저침습이고, 안정적이면서 재현성 높게 약제 농도의 경시 변화를 모니터할 수 있다. 또한, PDT 장치(1)의 광원(110)으로부터의 여기광을 이용하여 약제 농도의 경시 변화를 경카테테르적으로 모니터하므로, 약제 농도 검출 장치를 별도로 추가할 필요가 없어, 저코스트와 공간 절약을 실현할 수 있다. 또한, 약제 농도를 리얼타임으로 모니터할 수 있으므로, 약제 추가 투여의 판별 어시스트를 리얼타임으로 행할 수 있다.
또한, 본 실시 형태의 약제 농도 모니터 동작은, PDT에 한정되지 않고, 여기광을 흡수하여 형광을 발하는 약제를 이용한 치료나 진단에 있어서도 실행할 수 있다. 약제를 사용하는 치료나 진단에서는, 약제 동태(약제 딜리버리)를 파악하는 것이 중요하다. 본 실시 형태의 약제 농도 모니터 동작에 따르면, 소망 조직의 약제 농도를 경카테테르적으로 리얼타임이면서 미크로적으로 측정할 수 있어, 각종 약제의 동태를 파악할 수 있다. 또한, 저침습으로 모니터할 수 있으므로, 메리트가 커서 실용적이다. 또한, 본 실시 형태의 약제 농도 모니터 동작은, 특정한 장소에만 약제를 도달시키는 시스템(DDS, Drug Delivery System)에 있어서도 실행할 수 있어, 실제로 약이 국한적으로 도달할 수 있는지를 평가하는 데 유용하다.
[(3) 접촉 모니터 동작]
계속해서, 접촉 모니터 동작이 행해진다.
도 10은 레이저 카테테르의 접촉 상태를 도시하는 모식도이다.
레이저 카테테르(300)는, 발광 부위로서의 선단부가 심근 조직(11)의 내벽에 수직으로 접촉하도록 배치되는 것이 바람직하다(도 10의 (a) 참조, 이하 「수직 접촉 상태」라 기술함). 이는 레이저 카테테르(300)의 선단부로부터 심방 내 혈액(15)을 배제하여 심방 내 혈액(15) 중의 광감수성 약제의 활성화를 억제하기 위함이다. 또한, 레이저 카테테르(300)의 선단부를 조직에 직접 접촉시킴으로써 조직에 도입된 광감수성 약제를 선택적으로 활성화하기 위함이다.
그러나, 레이저 카테테르(300)의 선단부의 정확한 접촉 상태를 X선 촬영 또는 촉각적으로 인식하는 것은 곤란하다. 이 때문에, 실제로는, 레이저 카테테르(300)의 선단부가 조직에 대하여 수직 접촉 상태가 된다고는 할 수 없다. 레이저 카테테르(300)의 선단부와 조직 사이에 혈액(15)이 개재되어, 선단부가 혈중에 존재하는 경우도 있다(도 10의 (c) 참조, 이하 「비접촉 상태」라 기술함). 또는, 레이저 카테테르(300)의 선단부가 조직에 대하여 경사 접촉하고, 선단부와 조직의 간극에 부분적으로 혈액(15)이 존재하는 경우도 있다(도 10의 (b) 참조, 이하 「경사 접촉 상태」라 기술함).
접촉 모니터 동작에서는, 이러한 레이저 카테테르(300)의 선단부의 접촉 상태, 즉 접촉 상태인지 비접촉 상태인지, 접촉 상태인 경우의 접촉 각도(수직 접촉 상태·경사 접촉 상태) 등이 모니터된다. 또한, 본 명세서에 있어서 「접촉 각도」란, 협의의 각도의 값만을 말하는 것은 아니고, 레이저 카테테르(300)의 선단부의 조직에 대한 접촉 상태가 수직인지 경사인지 등의 광의의 접촉 각도도 의미하는 것으로 한다.
계속해서, 광원(110)은 광학계(120)에 제1 강도로 여기광을 출력하고, 제어부(150)는 형광 강도 및 약제 농도를 산출하고, 표시부(170)는 형광 강도의 경시 변화를 표시 화면에 표시하고 있다. 예를 들면, 표시부(170)는 형광 강도의 경시 변화를 그래프로서 표시 화면에 표시하고 있다.
여기서, 형광 강도의 경시 변화를 나타내는 그래프의 일례에 대하여 설명한다.
도 11은 형광 강도의 경시 변화를 나타내는 그래프이다.
이 도면은 도 7과 동일 조건에서의 형광 강도의 경시 변화를 나타내는 그래프이다. 그래프 중, A선은 형광 강도가 낮고, C선은 형광 강도가 높고, B선은 A선의 형광 강도와 C선의 형광 강도 사이에서 변동하였다.
또한, 이 도면에서는, 설명을 알기 쉽게 하기 위해서, 레이저 카테테르(300)의 선단부가 수직 접촉 상태, 경사 접촉 상태 및 비접촉 상태에 있을 때의 형광 강도의 경시 변화를 하나의 그래프로 나타내고 있다. 그러나, 실제는, 레이저 카테테르(300)의 선단부의 접촉 상태에 따라서 한쪽이 표시된다.
A선에 대하여 검토한다. 여기서, 도 7에 도시한 바와 같이, 조직에서의 형광 강도는, 혈액에서의 형광 강도보다 작다. 따라서, A선은 레이저 카테테르(300)가 여기광을 조직에 조사했을 때의 형광 강도를 나타낸다고 생각된다. 따라서, A선과 같은 형광 강도가 산출된 경우에는, 레이저 카테테르(300)의 선단부가 조직에 대하여 수직 접촉 상태에 있기 때문에, 조직 중의 형광 강도가 반영되었다고 생각된다.
C선에 대하여 검토한다. 여기서, 도 7에 도시한 바와 같이, 혈액에서의 형광 강도는, 조직에서의 형광 강도보다 크다. 따라서, C선은 레이저 카테테르(300)가 여기광을 혈액에 조사했을 때의 형광 강도를 나타낸다고 생각된다. 따라서, C선과 같은 형광 강도가 산출된 경우에는, 레이저 카테테르(300)의 선단부가 조직에 대하여 비접촉 상태에 있기 때문에, 혈중의 형광 강도가 반영되었다고 생각된다.
B선에 대하여 검토한다. B선은 A선의 형광 강도와 C선의 형광 강도 사이에 위치하므로, 레이저 카테테르(300)의 선단부가 조직에 대하여 경사 접촉 상태에 있다고 생각된다. 또한, 레이저 카테테르(300)의 선단부의 접촉 대상물이 움직이는 심근 조직이기 때문에, 레이저 카테테르(300)가 조직의 움직임에 추종하여 움직인이다. 그 결과, 레이저 카테테르(300)의 선단부가 조직에 대하여 경사져서 접촉하고 있는 경우에는, 레이저 카테테르(300)의 선단부와 조직 사이의 혈액량이 계측중으로 변화하기 쉽다. 또한 심박에 따라서 심근 조직 및 심방 내의 혈류량도 변화한다. 이들의 영향을 받아, B선의 형광 강도 변동은, A선이나 C선에 비해 커진다.
또한, 레이저 카테테르(300)의 선단부가 조직에 어떠한 형태로 접촉하고 있는 경우에는(수직 접촉 상태, 경사 접촉 상태), 레이저 카테테르(300)가 심근 조직의 움직임에 의해 영향을 받는 경우도 있다. 즉, 레이저 카테테르(300)의 선단부의 접촉 상태가 접촉 상태(수직 접촉 상태, 경사 접촉 상태)와 비접촉 상태 사이에서 변동한다. 이 경우에는, 형광 강도의 변동이 보다 심해진다. 따라서, 파형에 나타내지는 형광 강도의 변동을 바탕으로, 레이저 카테테르(300)가 심근 조직의 움직임에 추종하고 있는지의 여부를 판별할 수 있다. 예를 들면, 그래프 중 A선에 있어서, 약제 투여 후 4초 부근의 형광 강도가 높은 것은, 순간적으로 레이저 카테테르(300)의 선단부가 수직 접촉 상태로부터 비접촉 상태가 되고, 다시 수직 접촉 상태로 되돌아간 것을 나타낸다.
제어부(150)는 산출한 형광 강도를 바탕으로, 레이저 카테테르(300)의 선단부의 접촉 상태(접촉·비접촉, 접촉 시의 접촉 각도)를 판별한다(스텝 S106).
구체적으로는, 제어부(150)는 산출한 형광 강도가 제1 임계값보다 크거나 또는 동일 레벨이라고 판별할 때, 비접촉 상태라고 판별한다(C선). 제어부(150)는 형광 강도의 최소값이 제1 임계값보다 작은 제2 임계값보다 작거나 또는 동일 레벨이라고 판별할 때, 수직 접촉 상태라고 판별한다(A선). 제어부(150)는 형광 강도가 제1 임계값과 제2 임계값 사이에서 일정 주기로 변동한다고 판별할 때, 경사 접촉 상태라고 판별한다(B선).
제어부(150)는 표시부(170)를 이용하여, 판별한 접촉 상태를 시술자에게 통지한다. 구체적으로는, 제어부(150)는 경사 접촉 상태 또는 비접촉 상태를 판별하면, 레이저 카테테르(300)의 선단부의 접촉 상태 변경을 재촉하는 표시 정보를 생성하고, 생성한 표시 정보를 포함하는 표시 명령을 표시부(170)에 출력한다. 표시부(170)는 제어부(150)로부터 표시 명령을 취득하면, 표시 명령에 포함되는 표시 정보에 기초하여, 시술자에게 레이저 카테테르(300)의 선단부의 접촉 상태 변경을 재촉하는 정보를 표시한다(스텝 S107). 시술자는 레이저 카테테르(300)에 설치된 핸드 피스 등(도시하지 않음)을 조작함으로써, 레이저 카테테르(300)의 선단부의 조직에 대한 접촉 상태를 변경할 수 있다.
제어부(150)는 계속해서 형광 강도 및 약제 농도를 산출하고 있다. 제어부(150)는 기억부(160)에 기억된 형광 강도 및 약제 농도를 참조한다. 제어부(150)는 참조한 형광 강도를 바탕으로 레이저 카테테르(300)의 선단부와 조직 사이의 간극에 존재하는 혈액량을 산출한다. 제어부(150)는 산출한 혈액량과, 참조한 약제 농도를 바탕으로, 치료 시의 여기광 조사 프로토콜, 즉 여기광의 제2 강도나 조사 시간 등을 산출한다(스텝 S108).
예를 들면, 레이저 카테테르(300)의 선단부가 경사 접촉 상태 또는 비접촉 상태에 있어서 간극에 혈액이 존재하는 경우에는, 혈액량으로부터 여기광의 손실(조직에 도달하지 않는 여기광)을 고려하여, 제2 강도를 높게 설정하거나, 조사 시간을 길게 설정한 여기광 조사 프로토콜로 한다. 제어부(150)는 여기광 조사 프로토콜을 산출하면, 조사 프로토콜에 관한 표시 정보를 생성하고, 생성한 표시 정보를 포함하는 표시 명령을 표시부(170)에 출력한다. 표시부(170)는 제어부(150)로부터 표시 명령을 취득하면, 표시 명령에 포함되는 표시 정보에 기초하여, 여기광 조사 프로토콜(제2 강도, 조사 시간)에 관한 정보를 표시한다.
이상과 같이, 제어부(150)는 형광 강도를 바탕으로 약제 농도 및 혈액량을 산출하고, 산출한 약제 농도 및 혈액량을 바탕으로 여기광 조사 프로토콜을 산출한다. 즉, 제어부(150)는 형광 강도를 바탕으로 여기광 조사 프로토콜을 산출할 수 있다.
또한, 형광 강도의 경시 변화는 레이저 카테테르(300)의 선단부의 접촉 상태에 따라서 서로 다르므로, 형광 강도의 경시 변화를 표시부(170)에 의해 표시 화면에 표시하면, 제어부(150)에 의해 접촉 상태를 판별하지 않아도, 시술자는 형광 강도의 경시 변화로부터 접촉 상태를 추정할 수 있다.
그런데, 순환기계 질환의 분야에서는, 안전성과 확실성을 담보하기 위해서, 카테테르의 선단부의 소망 조직으로의 접촉 상태 및 간극에 존재하는 혈액량이나, 이물·파손의 유무를 리얼타임으로 판별하는 것이 중요하다. 또한 소망 조직이 심근 조직과 같이 움직이는 대상인 경우, 확실한 치료를 실시하기 위해서는, 그 조직의 움직임에 레이저 카테테르가 추종하고 있는지 등의 상세한 접촉 상태를 판별할 필요가 있다. 종래부터, 예를 들면 혈액 배제에 의한 투명 공간 확보, X선 투시, 전위 계측(임피던스 계측), 전위 맵핑, 온도 계측, 힘 계측(압력, 응력), 다색 광원에 의한 반사광 계측 등을 바탕으로 카테테르의 접촉 상태를 판별하는 것이 알려져 있다. 그러나, 경카테테르 치료 및 진단에 있어서, 혈액 중에서 카테테르의 선단 상황을 판별하는 것은 곤란하며, 상세한 접촉 상태를 판별할 수 있는 기술은 아직 개발되어 있지 않다. 상기 각 종래법에서는, 대략적인 접촉 상태밖에 판별할 수 없는 데다가, 이하에 기재한 바와 같이 과제도 많다.
혈액 배제에 의한 투명 공간의 확보란, 벌룬에 의해 혈류를 일시적으로 차단하고, 생리 식염수 등을 카테테르 선단부로부터 유출함으로써 투명 공간을 확보하여 혈관 내시경으로 접촉 상태를 관찰하는 방법이다. 그러나 이 방법은, 말초 혈관이 허혈 상태가 될 우려가 있다.
X선 투시에서는, 정밀도 부족 때문에, 카테테르와 조직과의 이격 거리나, 카테테르와 소망 조직 사이의 혈액량을 판별하기 곤란하다. 또한, 조직이 움직일 경우, 카테테르의 선단이 그 움직임에 추종하고 있는지의 여부도 명확하지 않다. 따라서, 카테테르의 선단에 의해 혈액(심강 내 치료의 경우) 또는 혈관벽(혈관 내 치료의 경우)을 손상시킬 우려가 있다. 또한, 소망 조직으로의 에너지 투입량이 상정량보다도 감소하여, 충분한 치료 효과를 얻지 못할 우려가 있다. 또한, 해부학의 지식과 경험(접촉 시의 수감)을 갖고 있는 의사밖에 판별할 수 없어, 주관에 의지하고 있는 것이 가장 큰 문제점이다(일본 특허 출원 공표 제 제2007-525263호 참조).
전위 계측(임피던스 계측)이란, 심근 조직은 전위 전파에 의해 수축 운동을 하고 있기 때문에, 그 전위를 계측함으로써 심근 조직으로의 접촉 상태를 판별하는 방법이다. 그러나, 광에 의한 치료를 실시하는 경우, 카테테르의 선단부(심근 조직에 대한 접촉부)는 광학 윈도우가 된다. 이 때문에, 전위 측정 부위는, 카테테르의 선단부 이외의 부위에 설치하게 된다. 그 결과, 광 조사 부위와 전위 측정 부위가 불일치가 되어, 진단 영역과 치료 영역에 어긋남이 생겨서, 정확한 치료를 할 수 없게 될 우려가 있다. 또한, 전극 면적이 감소하기 때문에, 각도 판별의 정밀도가 낮아질 우려가 있다. 또한, 전기 계측을 행하기 때문에, 전자 간섭의 영향의 우려가 있다(일본 특허 출원 공표 제2008-531170호 참조).
전위 맵핑이란, 전위 계측을 삼차원으로 발전시킨 것이다. 그러나, 종래의 장치에서는 상세한 접촉 상태를 판별하는 분해능이 부족하다. 또한, 판별의 시간이 걸려, 과잉의 접촉력에 의해 생기는 인위적인 영향이 생길 우려가 있다(일본 특허 출원 공표 제2008-531170호 참조). 또한, 전위 계측이 되는 카테테르가 어긋나면, 맵핑 화상과 진짜 위치에 어긋남이 생길 우려가 있다. 또한, 전기 계측을 행하기 때문에, 전자 간섭의 영향의 우려가 있다(일본 특허 출원 공표 제2008-531170호 참조).
온도 계측이란, 혈관 폐색부를 갖는 질환에 있어서, 온도 계측에 의해 폐색부를 특정하는 방법이다(일본 특허 출원 공표 제2007-525263호 참조). 그러나, 폐색부에 한한 진단법이며, 예를 들면 심방 세동이나 심실 조동 등 폐색 공간이 없는 질환에는 적용할 수 없다. 또한 정상 혈관벽에 불필요한 열을 가할 우려가 있다.
힘 계측(압력, 응력)이란, 카테테르에 압력 센서나 응력 센서를 탑재하여, 접촉 대상물을 특정하는 방법이다(일본 특허 출원 공표 제2009-542371호, 미국 특허 제6,696,808호, 미국 특허 공개 제2008/0009750호, 국제 공개 제01/33165호 참조). 그러나, 카테테르의 선단부가 대형화하거나, 전자 간섭의 영향을 받을 우려가 있다(일본 특허 출원 공표 제2008-531170호 참조).
다색 광원에 의한 반사광 계측이란, 파장에 따라 서로 다른 흡수 계수를 이용한 방법이다. 구체적으로는, 다색 광원을 이용하여, 각 파장의 반사율의 차이로부터 조직을 판별한다(특허 제4,261,101호 참조). 이 방법으로는 카테테르와 조직 간의 혈액량을 추정할 수 있지만, 복수 광원을 준비하고 있기 때문에, 광학계가 복잡해져서, 장치가 대형화하고, 코스트가 증가할 우려가 있다.
이에 반해, 본 실시 형태의 접촉 모니터 동작에 따르면, 형광 강도를 검출함으로써, 소망 조직으로의 접촉 상태나 추종 이동을 경카테테르적으로 리얼타임으로 판별할 수 있다. 이 방법에 따르면, 혈액 배제 등이 불필요하므로 저침습이다. 또한, 판별된 접촉 상태 등을 바탕으로 여기광 조사 프로토콜을 산출할 수 있으므로, 안전하면서 확실한 치료 및 진단을 보조할 수 있다.
[(4) 이물·파손 모니터 동작]
광선 역학적 치료 시에는, 이물·파손 모니터 동작이 행해진다.
우선, 시술자는 표시부(170)에 표시된 여기광 조사 프로토콜을 참조하여, 조작부(180)를 조작하여 고파워의 제2 강도로의 여기광 출력 명령을 제어부(150)에 입력한다. 제어부(150)는 여기광 출력 명령을 취득하면, 광원(110)에 제2 강도로의 여기광 출력 명령을 출력한다. 광원(110)은 제어부(150)로부터 여기광 출력 명령을 취득하면, 제2 강도로 여기광을 출력한다. 광원(110)이 출력한 여기광은, 광학계(120) 및 레이저 카테테르(300)를 거쳐서 조직에 조사되고, 광선 역학적 치료가 실시된다(스텝 S109).
제어부(150)는 검출부(130)로부터 취득한 전기 신호를 바탕으로, 형광 강도를 산출한다. 제어부(150)는 산출한 형광 강도와, 정맥 주사를 개시한 시각 등의 기준 시각으로부터의 경과 시간을 바탕으로, 형광 강도의 경시 변화에 관한 표시 정보를 생성하고, 생성한 표시 정보를 포함하는 표시 명령을 표시부(170)로 출력한다. 표시부(170)는 제어부(150)로부터 표시 명령을 취득하면, 표시 명령에 포함되는 표시 정보에 기초하여, 형광 강도의 경시 변화를 표시 화면에 표시한다.
제어부(150)는 산출한 형광 강도가 임계값 이상인지의 여부를 판별한다(스텝 S110). 이 임계값은, 예를 들면 통상적인 형광 강도의 몇배 이상의 값이다.
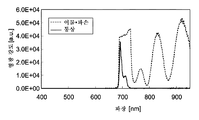
도 19는 파장과 형광 강도의 관계를 나타내는 그래프이다.
이 도면은, 이물 접촉이나 파손의 우려가 있는 레이저 카테테르 및 통상적인 레이저 카테테르의 파장(Wavelength)과 형광 강도(Intensity)의 관계를 나타낸다. 레이저 카테테르의 선단부가 생체 조직 이외의 이물에 접촉하거나 파손했을 때는, 통상적인 형광 강도에 비교하여 형광 강도가 강해지는 것을 알 수 있다.
제어부(150)는 형광 강도가 임계값 이상이라고 판별하면, 즉 형광 강도가 그때까지의 형광 강도를 도외시하는 것 처럼 몇배 이상으로 증가했다고 판별하면, 이물이나 파손이 있다고 추정한다(스텝 S110에서 예). 제어부(150)는 이물이나 파손이 있다고 추정하면, 여기광 조사의 종료 및 이물·파손의 발생에 관한 표시 정보를 생성하고, 생성한 표시 정보를 포함하는 표시 명령을 표시부(170)에 출력한다. 이물·파손의 발생에 관한 표시 정보에는, 여기광 조사의 정지, 조사 시간의 재설정, 조사 파워의 재설정, 레이저 카테테르(300)의 검사 등을 재촉하는 정보가 포함된다. 표시부(170)는 제어부(150)로부터 표시 명령을 취득하면, 표시 명령에 포함되는 표시 정보에 기초하여, 시술자에게 여기광 조사의 종료(스텝 S111) 및 이물·파손 발생에 관한 정보를 표시한다(스텝 S112).
또한, 제어부(150)는 형광 파장 이외의 임의의 파장(여기광 파장 등)의 비정상적인 강도 증가를 검지한 경우에도 이물이나 파손이 있다고 추정하여(스텝 S110에서 예), 마찬가지의 처리(스텝 S111, 스텝 S112)를 행해도 된다.
한편, 제어부(150)는 형광 강도가 임계값 이상이라고 소정 시간 내에 판별하지 않을 때는, 이물이나 파손이 없다고 추정하고, 살세포 효과 판별 동작으로 이행한다(스텝 S110에서 아니오).
또한, 형광 강도가 소정의 임계값을 초과했을 때 이물이나 파손이 있다고 추정할 수 있으므로, 형광 강도를 표시부(170)에 의해 표시 화면에 표시하면, 제어부(150)에 의해 이물·파손의 발생을 추정하지 않아도, 시술자는 형광 강도로부터 이물·파손의 발생을 추정할 수 있다.
또한, 심강 내에 레이저 카테테르(300) 외에 복수개의 카테테르를 배치하는 경우, 레이저 카테테르(300)가 다른 카테테르에 접촉할 우려가 있다. 예를 들면, 심강 내에 배치한 다른 카테테르에 접촉한 상태에서 레이저 카테테르(300)로부터 광을 조사하면, 쌍방의 카테테르가 기능을 잃어버릴 우려가 있다. 레이저 카테테르(300)의 선단부의 이상을 알아차리지 못한 채 여기광의 조사를 속행하면, 레이저 카테테르(300)의 선단부가 발열하여, 생체에 열손상을 줄 위험이 있다. 또한, 피접촉측의 카테테르도, 기능을 다할 수 없게 될 우려가 있다.
본 실시 형태의 이물·파손 모니터 동작에 따르면, 생체 조직 이외에 접촉하고 있는 경우에는 강한 반사광이 계측되기 때문에, 이물·파손의 발생을 경카테테르적으로 리얼타임으로 추정할 수 있다. 이에 의해, 레이저 카테테르(300)의 검사를 시술자에게 재촉할 수 있으므로, 환자에 위해를 미치는 일 없이 매우 안전하게 치료를 행할 수 있다.
[(5)살세포 효과 판별 동작]
계속해서, 살세포 효과 판별 동작이 행해진다.
광선 역학적 치료에서는, 조직에 도입된 광감수성 약제는, 레이저 카테테르(300)로부터의 여기광을 흡수하여 에너지를 얻어 기저 상태로부터 일중항 여기 상태가 된다. 대부분의 에너지는, 항간 교차에 의해 일중항 여기 상태로부터 삼중항 여기 상태로 이행하지만, 나머지 일부는 일중항 상태로부터 기저 상태로 되돌아가고, 이 때에 형광을 발한다. 또한, 삼중항 여기 상태의 광감수성 약제가 삼중항 상태의 산소와 충돌하면, 에너지를 산소로 이양하고, 산화력이 강한 일중항 산소를 생성한다. 이 산화력에 의해 조직에 상해를 줌과 함께, 광감수성 약제를 파괴(블리칭)한다. 블리칭이 생기면, 실효적인 약제량이 감소하기 때문에, 형광량도 감소한다. 따라서, 형광량의 감소는, 블리칭 및 조직 상해량의 지표가 된다. 광감수성 약제가 발한 형광은 레이저 카테테르(300)를 거쳐서 광학계(120)에 의해 취출되어 검출부(130)에 입사된다. 검출부(130)는, 광학계(120)로부터 입사한 형광을 검출하고, 검출한 형광의 강도를 전기 신호로서 제어부(150)에 출력한다.
계속해서, 광원(110)은 광학계(120)에 제2 강도로 여기광을 출력하고, 제어부(150)는 형광 강도를 산출하고, 표시부(170)는 형광 강도의 경시 변화를 표시 화면에 표시하고 있다. 예를 들면, 표시부(170)는 형광 강도의 경시 변화를 그래프로서 표시 화면에 표시한다.
여기서, 형광 강도의 경시 변화를 나타내는 그래프의 일례에 대하여 설명한다.
도 12는 형광 강도의 경시 변화를 나타내는 그래프이다.
이 도면은, 광감수성 약제를 돼지에 정맥 주사 후 20분의 시점에서, 여기광 조사를 20초간 행한 경우의, 형광 강도의 경시 변화를 나타낸다. 전술한 바와 같이, 형광량의 감소는 블리칭 및 조직 상해량의 지표가 되므로, 형광 강도의 감쇠 커브를 표시함으로써, PDT의 진행을 리얼타임으로 표시할 수 있다.
제어부(150)는 산출한 형광 강도가 임계값 미만까지 감쇠하였는지 여부를 판별한다(스텝 S113). 제어부(150)는 형광 강도가 임계값 미만까지 감쇠했다고 판별하면, 여기광이 조사되고 있는 조직에서 살세포 효과가 있었던 것으로 추정한다(스텝 S113에서 예). 그리고, 제어부(150)는 살세포 효과의 지표에 관한 표시 정보를 생성하고, 생성한 표시 정보를 포함하는 표시 명령을 표시부(170)에 출력한다. 표시부(170)는 제어부(150)로부터 표시 명령을 취득하면, 표시 명령에 포함되는 표시 정보에 기초하여, 시술자에게 살세포 효과의 지표에 관한 정보를 표시한다. 시술자는 표시부(170)에 표시된 살세포 효과의 지표에 관한 정보를 참조하고, 전기 전도 블록 형성의 판별 동작으로 이행한다.
한편, 제어부(150)는 소정 시간 내에 형광 강도가 임계값 미만으로 저하한 것을 판별하지 않은 경우에는, 산출한 형광 강도를 바탕으로, 여기광 조사의 연장이나 광 강도의 재설정을 재촉하는 표시 정보를 생성하고, 생성한 표시 정보를 포함하는 표시 명령을 표시부(170)에 출력한다(스텝 S113에서 아니오). 표시부(170)는 제어부(150)로부터 표시 명령을 취득하면, 표시 명령에 포함되는 표시 정보에 기초하여, 시술자에게 여기광 조사의 연장이나 광 강도의 재설정을 재촉하는 정보를 표시한다. 제어부(150)는 표시 명령 출력 후 소정 시간이 경과하면, 스텝 S108의 동작으로 이행한다.
또한, 형광 강도가 임계값 미만까지 감쇠했을 때 살세포 효과가 있었던 것으로 추정할 수 있으므로, 형광 강도를 표시부(170)에 의해 표시 화면에 표시하면, 제어부(150)에 의해 살세포 효과의 유무를 추정하지 않아도, 시술자는 형광 강도로부터 살세포 효과의 유무를 추정할 수 있다.
본 실시 형태의 살세포 효과 판별 동작에 따르면, 약제 농도에 상관이 있는 형광 강도를 바탕으로, 여기광이 조사되어 있는 조직에서 진행하는 심근 세포로의 상해, 즉 치료 효과를 리얼타임으로 경카테테르적으로 계측할 수 있기 때문에, 확실한 치료가 가능해진다.
[(6)전기 전도 블록 형성의 판별 동작]
계속해서, 전기 전도 블록 형성의 판별 동작이 행해진다.
전기 전도 블록 형성의 판별 동작에서는, 살세포 효과 판별에 이용한 형광의시간 파형을 심전도(Electrocardiogram, ECG. ECG의 취득 방법은 나중에 설명함)와 동기한다. ECG의 R파와 R-R파 간격 중에 나타나는 형광 피크 강도의 위상차를 제어부(150)에서 해석함으로써, 전기 전도 블록 형성의 판별을 행한다. 경우에 따라서는, 레이저 카테테르(300)를 전기 전도 블록 내부(도 13에서 도시한 일점쇄선내)에 재배치하여, 여기광 출력을 제1 강도로 변경하여, 저파워로 계측한 형광의 시간 파형을 ECG에 동기하여 해석해도 된다. 레이저 카테테르를 재배치하여 계측하는 경우의 수순은 이하와 같다.
우선, 시술자는 레이저 카테테르(300)의 선단부를 전기 전도 블록 내부(도 13에서 도시한 일점쇄선 내) 또는 여기광 조사 부위에 배치한다. 그리고, 시술자는 조작부(180)를 조작하여 저파워의 제1 강도로의 여기광 출력 명령을 제어부(150)에 입력한다. 제어부(150)는 여기광 출력 명령을 취득하면, 광원(110)에 제1 강도로의 여기광 출력 명령을 출력한다. 광원(110)은, 제어부(150)로부터 여기광 출력 명령을 취득하면, 제1 강도로 여기광을 출력한다. 광원(110)이 출력한 여기광은, 광학계(120) 및 레이저 카테테르(300)를 거쳐서 조직에 조사된다. 조직에 도입된 광감수성 약제는, 레이저 카테테르(300)로부터의 여기광을 흡수하여 형광을 발한다. 광감수성 약제가 발한 형광은, 레이저 카테테르(300)를 거쳐서 광학계(120)에 의해 취출되어 검출부(130)에 입사한다. 검출부(130)는, 광학계(120)로부터 입사한 형광을 검출하고, 검출한 형광의 강도를 전기 신호로서 제어부(150)에 출력한다. 제어부(150)는 취득한 전기 신호를 바탕으로 형광 강도를 산출한다.
한편, 심전 취득부(140)는 심전 신호를 취득하고, 취득한 심전 신호를 제어부(150)에 공급한다. 제어부(150)는 산출한 형광 강도와 취득한 심전 신호를 바탕으로 표시 정보를 생성하고, 생성한 표시 정보를 포함하는 표시 명령을 표시부(170)로 출력한다. 표시부(170)는 제어부(150)로부터 표시 명령을 취득하면, 표시 명령에 포함되는 표시 정보에 기초하여, 형광 강도와 심전도의 R파의 상관을 표시 화면에 표시한다.
여기서, 형광 강도와 ECG의 R파의 상관에 대하여 설명한다.
도 14는 ECG와 심강 내압, 심근 조직의 혈류량을 지배하는 관상 동맥 혈류량의 관계를 도시하는 도면이며, 「에센셜 해부·생리학」(각켄메디칼슈쥰사, 2001년)에 기재되는 전제적인 지식으로, 이하의 설명에 있어서 유효하다.
이 도면에 도시한 바와 같이, 심강 내와 심근 조직 중의 혈류량에서는, 혈류량의 시간 변화가 서로 다르다. 심강 내의 혈류량은 R파에 일치한 시점에서 피크를 맞는 데 반해, 우심계의 심근 조직 중의 혈류량은 R파로부터 약 200㎳ 지연된 시점에서 제1 피크가, 약 400㎳ 지연된 시점에서 제2 피크가 나타난다.
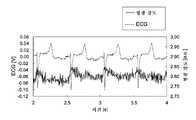
도 15는 레이저 카테테르가 수직 접촉 상태일 때의 형광 강도와 R파의 상관을 도시하는 도면이다.
레이저 카테테르(300)의 선단부가 수직 접촉 상태일 때의 형광 강도(예를 들면 조사 파워 900㎽ 시)와 R파의 상관에 대하여 설명한다. 수직 접촉 상태에서는, R파에 대하여 약 100㎳와 400㎳ 지연된 부분에 형광 피크가 관측된다. 또한, 카테테르를 좌심계에 배치한 경우에는, 전의 도면의 좌관상 동맥 혈류량에 비례한 변화를 취한다. 이는 R파 발생 시에 심실이 수축하고, 혈액이 전신(심근 조직을 포함함)에 공급된다. 혈액에는 광감수성 약제가 존재하므로, 심근의 혈관에 혈액이 공급되었을 때의 심근 조직의 형광 강도가 가장 높아진다. 이 때문에, R파 발생으로부터 소정 시간 지연되어 형광 강도의 피크가 발생한다.
도 16은 레이저 카테테르가 경사 접촉 상태일 때의 형광 강도와 R파의 상관을 도시하는 도면이다.
레이저 카테테르(300)의 선단부가 경사 접촉 상태일 때의 형광 강도(예를 들면 조사 파워 900㎽ 시)와 R파의 상관에 대하여 설명한다. 경사 접촉 상태에서는, 간극에 혈액이 존재하고, 심강 내의 혈류량의 지배가 강해지기 때문에, 형광 강도의 피크와 R파가 일치한다.
이상과 같이, 수직 접촉 상태 및 경사 접촉 상태에 있어서, R파와 형광 강도의 피크의 위상차는 뚜렷이 서로 다르고, 접촉 상태가 유지되고 있으면 위상차는 일정하다.
따라서, 제어부(150)는 산출한 형광 강도와 취득한 심전 신호를 바탕으로, 형광 강도와 R파의 위상차가 일정한지의 여부를 판별함으로써, 전기 전도 블록이 형성되었는지의 여부를 판별한다(스텝 S114). 제어부(150)는 형광 강도와 R파의 위상차가 일정하다고 판별하면, 전기 전도 블록이 형성되어 있지 않다고 판별하여(스텝 S114에서 아니오), 표시부(170)에, 시술자에게 여기광 조사의 종료(스텝 S116) 및 레이저 카테테르(300)의 이동을 재촉하는 정보를 표시시킨다(스텝 S117). 시술자는 표시부(170)에 표시된 정보를 참조하여, 여기광 조사를 일단 종료하고, 레이저 카테테르(300)를 이동한다. 그리고, 다시 스텝 S104 이후의 처리가 행해진다.
도 13은 레이저 카테테르의 이동의 궤적을 도시하는 모식도이다.
시술자는 레이저 카테테르(300)의 선단부를 폐정맥(PV, Pulmonary Vein)의 이상 흥분 부위를 둘러싸도록(도면 중 일점쇄선 또는 점선) 이동시킨다.
한편, 제어부(150)는 형광 강도와 R파의 위상차가 일정하지 않다고 판별하면, 전기 전도 블록이 형성되었다고 판별하여(스텝 S114에서 예), 시술자에게 여기광 조사의 종료 및 레이저 카테테르(300)의 발거를 재촉하는 표시 명령을 생성하고, 생성한 표시 정보를 포함하는 표시 명령을 표시부(170)로 출력한다. 표시부(170)는 제어부(150)로부터 표시 명령을 취득하면, 표시 명령에 포함되는 표시 정보에 기초하여, 시술자에게 여기광 조사의 종료 및 레이저 카테테르(300)의 발거를 재촉하는 정보를 표시 화면에 표시하고, 처리를 종료한다(스텝 S115).
여기서, 형광 강도와 R파의 위상차가 일정하지 않은 경우에 전기 전도 블록이 형성되었다고 판별하는 원리에 대하여 설명한다. 심근 세포의 상해가 진행되면, 그 심근 세포는 전기를 전도하지 않게 되기 때문에, 심박 시에 심근 세포 자신은 수축하지 않는다. 이 상해된 심근 세포가 박스 형상으로 형성된 전기 전도 블록은, 자신은 수축하지 않고, 근방의 심근 조직의 수축 운동에 추종하도록 하여 움직이게 된다. 그 결과, 레이저 카테테르(300)의 선단부의 접촉 상태는 불안정해져서, 시시각각 변화한다. 그 결과, 형광 강도와 R파의 위상차는 불안정해진다. 바꿔 말하면, 형광 강도와 R파의 상관은, 도 15 및 도 16에 도시한 상관을 왔다갔다하는 상태가 된다.
따라서, 본 실시 형태의 전기 전도 블록 형성의 판별 동작에 따르면, 형광 강도와 심전도의 R파의 위상차에 의해, 전기 전도 블록의 형성을 리얼타임으로 판별할 수 있다.
구체적으로는, 형광 강도의 피크가 R파보다 소정 시간 지연되어 발생할 때는, 전기 전도 블록은 형성되지 않고, 레이저 카테테르(300)의 선단부는 수직 접촉 상태에 있다고 판별할 수 있다. 형광 강도의 피크와 R파가 대략 동시에 발생할 때는, 전기 전도 블록은 형성되지 않고, 레이저 카테테르(300)의 선단부는 경사 접촉 상태에 있다고 판별할 수 있다. 형광 강도의 피크의 R파에 대한 위상차가 일정하지 않게 되었을 때는, 전기 전도 블록이 형성되었다고 판별할 수 있다.
또한, 형광 강도와 R파의 위상차가 일정하지 않은 경우에 전기 전도 블록이 형성되었다고 판별할 수 있으므로, 형광 강도와 R파의 상관을 표시부(170)에 의해 표시 화면에 표시하면, 제어부(150)에 의해 전기 전도 블록 형성의 유무를 추정하지 않아도, 시술자는 형광 강도와 R파의 상관으로부터 전기 전도 블록 형성의 유무를 추정할 수 있다.
<제2 실시 형태>
다음으로, 본 발명의 다른 실시 형태에 따른 PDT 장치에 대하여 설명한다. 이하의 설명에 있어서, 제1 실시 형태의 PDT 장치(1)와 마찬가지의 구성, 기능 및 동작 등에 대해서는 설명을 생략 또는 간략하고, 서로 다른 점을 중심으로 설명한다.
제2 실시 형태에 따른 광학계 및 검출부에 대하여 설명한다.
[광학계 및 검출부의 구성]
도 17은 본 발명의 제2 실시 형태의 광학계 및 검출부 등을 도시하는 블록도이다.
광학계(120a)는, 숏 패스 필터(121)와, 제1 렌즈(122)와, PBS(123)와, 제1 다이크로익 미러(Dichroic Mirror, 이하 「DM」이라 기술함)(126)와, 제2 DM(127)을 갖는다.
검출부(130a)는 제1 포토다이오드(Photodiode, 이하 「PD」라 기술함)(131)와, 제2 PD(132)를 갖는다.
제1 DM(126)은, PBS(123)로부터 입사한 광 중, 특정한 파장의 광을 반사하고, 그 외의 파장의 광을 투과시킨다. 이에 의해, 제1 DM(126)은 레이저 카테테르(300)로부터의 형광의 일부를 반사하고, 그 외의 파장을 갖는 레이저 카테테르(300)로부터의 형광 및 정반사광을 투과시킨다. 제1 DM(126)에서 반사한 형광은, 제1 PD(131)에 입사한다.
제1 PD(131)는 제1 DM(126)으로부터 입사한 형광을 검출한다. 제1 PD(131)는 검출한 형광의 강도를 전기 신호로서 제어부(150)에 출력한다.
제2 DM(127)은 제1 DM(126)을 투과한 광 중, 특정한 파장의 광을 반사하고, 그 외의 파장의 광을 투과시킨다. 이에 의해, 제2 DM(127)은 제1 DM(126)을 투과한 형광의 일부를 반사하고, 그 외의 파장을 갖는 형광 및 정반사광을 투과시킨다. 제2 DM(127)에서 반사한 형광은 제2 PD(132)에 입사한다.
제2 PD(132)는 제2 DM(127)으로부터 입사한 형광을 검출한다. 제2 PD(132)는, 검출한 형광의 강도를 전기 신호로서 제어부(150)에 출력한다.
또한, 광학계(120a)는 제1 DM(126) 및 제2 DM(127)과 마찬가지의 구성을 갖는 DM을 더 가져도 된다. 이와 같이 하여, 최종적으로, 복수의 DM(126, 127 …)은 레이저 카테테르(300)로부터의 형광을 반사하고, 복수의 PD(131, 132 …)는 레이저 카테테르(300)로부터의 형광을 검출한다. 그리고, 복수의 DM(126, 127 …)은, 정반사광을 투과한다.
또한, 다른 실시 형태로서, 광원(110)으로서 펄스 광원을 이용하여, 광로 길이의 차이(레이저 카테테르(300)의 길이의 2배 정도)로부터 파이버 입사 단부면의 정반사광을 시간적으로 분리해도 된다.
<제3 실시 형태>
제3 실시 형태는, R-R파 간격에 있어서의 형광 강도의 피크와 R파의 위상차를 바탕으로 접촉 모니터의 스텝을 실행하는 것이다.
제1 실시 형태의 전기 전도 블록 형성의 판별 동작에서, R-R파 간격에 있어서의 형광 강도의 피크와 R파의 위상차를 바탕으로, 전기 전도 블록의 형성을 판별하였다. 이 원리를 접촉 모니터 동작에 이용해도 된다.
광원(110)은 광학계(120)에 제1 강도로 여기광을 출력한다. 검출부(130)는 광학계(120)로부터 입사한 형광을 검출한다. 검출부(130)는, 검출한 형광의 강도를 전기 신호로서 제어부(150)에 출력한다. 제어부(150)는 취득한 전기 신호를 바탕으로 형광 강도를 산출한다.
한편, 심전 취득부(140)는 심전 신호를 취득하고, 취득한 심전 신호를 제어부(150)에 공급한다. 제어부(150)는 산출한 형광 강도와 취득한 심전 신호를 바탕으로 표시 정보를 생성하고, 생성한 표시 정보를 포함하는 표시 명령을 표시부(170)로 출력한다. 표시부(170)는 제어부(150)로부터 표시 명령을 취득하면, 표시 명령에 포함되는 표시 정보에 기초하여, 형광 강도와 심전도의 R파의 상관을 표시 화면에 표시한다.
제어부(150)는 산출한 형광 강도와 취득한 심전 신호를 바탕으로, 레이저 카테테르(300)의 선단부의 접촉 상태를 판별한다(스텝 S106). 구체적으로는, 제어부(150)는 형광 강도의 피크가 R파보다 소정 시간 지연되어 발생한다고 판별할 때는, 레이저 카테테르(300)의 선단부는 수직 접촉 상태에 있다고 판별한다. 제어부(150)는 형광 강도의 피크와 R파가 동시에 발생한다고 판별할 때는, 레이저 카테테르(300)의 선단부는 경사 접촉 상태에 있다고 판별한다. 또한 형광 피크 강도로부터 레이저 카테테르(300)의 선단부와 조직의 내벽 사이의 혈액량을 추정할 수도 있다.
<제4 실시 형태>
제4 실시 형태는 자가 형광의 스펙트럼의 차이를 이용하여 접촉 모니터의 스텝을 실행하는 것이다. 또한, 자가 형광이란 조직 스스로가 발하는 광을 가리키며, 약제로부터의 형광을 의미하나 것은 아니다. 즉, 제4 실시 형태에서는 약제를 이용하지 않는 진단 방법을 나타내고 있다.
광원(110)은, 심근 조직의 자가 형광 스펙트럼 특성과 혈액의 자가 형광 스펙트럼 특성의 차이를 판별하기 쉬운 여기광을 출력한다. 검출부(130)는 입사한 형광을 검출한다. 검출부(130)는 검출한 형광의 강도를 전기 신호로서 제어부(150)에 출력한다. 제어부(150)는 취득한 전기 신호를 바탕으로 형광 스펙트럼을 산출한다. 제어부(150)는 산출한 형광 스펙트럼이 심근 조직의 자가 형광 스펙트럼 특성과 혈액의 자가 형광 스펙트럼 특성 중 어느 것을 나타내는지를 판별한다. 제어부(150)는 산출한 형광 스펙트럼을 심근 조직 및 혈액의 자가 형광 스펙트럼 특성과 비교하여, 레이저 카테테르(300)의 선단부의 접촉 상태를 판별한다(스텝 S106). 구체적으로는, 제어부(150)는 산출한 형광 스펙트럼이 심근 조직의 자가 형광 스펙트럼 특성을 나타낸다고 판별하면, 레이저 카테테르(300)의 선단부가 수직 접촉 상태에 있다고 판별한다. 제어부(150)는 산출한 형광 스펙트럼이 혈액의 자가 형광 스펙트럼 특성을 나타낸다고 판별하면, 레이저 카테테르(300)의 선단부가 비접촉 상태에 있다고 판별한다. 제어부(150)는 산출한 형광 스펙트럼이 어느 자가 형광 스펙트럼 특성도 나타내지 않는다고 판별하면, 레이저 카테테르(300)의 선단부가 경사 접촉 상태에 있다고 판별한다.
자가 형광 스펙트럼의 차이를 이용한 접촉 모니터는, 혈관 폐색부(예를 들면, 동맥 경화성 질환 등)를 갖는 질환의 치료에 있어서의 레이저 카테테르의 접촉 모니터에도 유용하다.
도 18은 혈관 내강에서의 레이저 카테테르의 접촉 상태를 도시하는 모식도이다.
혈관 폐색부를 갖는 질환의 치료에 있어서, 레이저 카테테르(300)의 선단부가 혈관(20)의 혈관 폐색부(죽종)(21)에 접촉하고 있는지(도 18의 (a) 참조), 혈관벽(22)에 접촉하고 있는지(도 18의 (b) 참조)를 판별하는 것이 요구된다. 여기서, 콜라겐, 엘라스틴, 지방질 등의 조성비는, 혈관 폐색부와 혈관벽 사이에서 서로 다르다. 구체적으로는, 혈관 폐색부(동맥 경화)의 조성비는, 물 70%, 콜라겐 5%, 엘라스틴 6%, 지방질 9%이다. 혈관의 조성비는, 물 73%, 콜라겐 6.5%, 엘라스틴 10.5%, 지방질 1%이다. 이 때문에, 혈관 폐색부의 자가 형광 스펙트럼 특성과 혈관벽의 자가 형광 스펙트럼 특성과는 서로 다른 것으로 된다. 이 특성의 차이를 판별하기 쉬운 여기광을 피치료 부위에 조사하고, 형광을 계측하면, 레이저 카테테르(300)의 선단부가 혈관 폐색부(21)와 혈관벽(22) 중 어느 것에 접촉하고 있는지를 판별할 수 있다. 또한, 자가 형광 스펙트럼의 차이를 이용한 접촉 모니터에서는, 조성비로부터 죽종의 유무를 판별할 수 있으므로, 혈관직경의 크기로부터 죽종의 유무를 판별하는 IVUS(Intravascular Ultrasound, 혈관 내 초음파 검사)보다도 정확한 진단을 행할 수 있다.
<제5 실시 형태>
상기 제1 실시 형태의 (5) 살세포 효과 판별 동작에서는, 광선 역학적 치료 실시 중, 살세포 효과가 있는지의 여부를 판별했다(도 5의 스텝 S113). 이에 반해, 제5 실시 형태는, 광선 역학적 치료 실시 중, 이 살세포 효과의 판별에 더하여, 레이저 카테테르(300) 선단의 조직 내벽에 대한 접촉 상태를 판별하고자 하는 것이다.
심장 내에서의 레이저 카테테르(300)에서의 치료 중은 특히, 레이저 카테테르(300)가 호흡이나 심박의 영향으로 움직여서, 치료 대상 조직에 대한 접촉 상태가 변화하는 경우가 있다. 이 때문에, 여기광 조사 전에 레이저 카테테르(300) 선단의 접촉 상태를 확인했다고 해도(도 5의 스텝 S106), 광선 역학적 치료 실시 중에도, 레이저 카테테르(300) 선단의 접촉 상태의 변화를 감시하는 것이 좋다. 또한, PDT에 있어서는, 동일 조사 조건(조사 시간, 조사 파워)으로 치료를 실시해도, 치료 대상 부위에 있어서의 일중항 산소 발생량이 변동되기 때문에, 확실한 치료를 위해서는 PDT의 진행 상태(살세포 효과)도 리얼타임으로 감시하는 것이 좋다. 일중항 산소 발생량이 변동되는 이유 중 하나로서, 약제 농도의 개체차(레저피린의 혈장 중 약제 농도의 경우, ±10 내지 2%)를 들 수 있다. PDT에 의한 치료 효과에는, 광, 약제 및 산소의 양이 크게 관여되어 있기 때문에, 약제 농도가 적은 경우에는 충분한 치료 효과를 얻지 못할 가능성이 있다. 또 하나의 이유는, 치료 대상 부위에 따라서는, 심장 내에서 레이저 카테테르(300) 선단의 자세를 이상적인 접촉 상태(수직 접촉 상태)로 제어하기 어려운 것이다. 레이저 카테테르(300) 선단이 경사 접촉 상태나 비접촉 상태의 경우, 실효적인 조직으로의 광 에너지 투입량이 감소하고, 결과로서, 조사 시간을 길게 하거나 설정 조사 파워를 높이거나 하지 않으면, 치료 효과가 불충분해질 우려가 있다. 이러한 우려를 해소하기 위해서는, 리얼타임으로 치료 대상 조직에 있어서의 PDT 진행도(살세포 효과)와, 레이저 카테테르(300) 선단의 접촉 상태를 감시하여, 상황에 따른 조사 조건의 설정·변경을 행하는 것이 좋다.
치료광 조사 중에, 레이저 카테테르(300) 선단의 접촉 상태를 감시하는 방법으로서는, 예를 들면 X선 투시 화상과, 전위 계측(임피던스 계측)을 들 수 있다. 그러나, X선 투시 화상을 이용하는 경우에는, 시술 중에 계속해서 투시할 필요가 있으므로, 환자 및 시술자의 피폭량이 막대해진다고 하는 문제점이 있다. 한편, 전위 계측(임피던스 계측)을 이용하는 경우에는, 카테테르에 의한 심질환 치료의 경우, 선단에 전극이 달린 카테테르를 사용하기 때문에, 그 전위에 의해 치료 전에 접촉 상태를 어느 정도 파악할 수 있다. 그러나, 치료를 개시하면, 심근 세포의 전기 전달 능력이 없어져, 전위가 소실되어 가기 때문에, 접촉하고 있어도 전위를 관측할 수 없게 되어버린다. 즉, 치료 중에 카테테르 선단의 접촉 상태가 변화해도 검지할 수 없다고 하는 문제점이 있다.
이상과 같은 사정을 감안하여, 본 실시 형태는, 광선 역학적 치료 실시 중, 검출된 형광의 강도에 따라서, 살세포 효과의 추정과, 레이저 카테테르(300) 선단의 조직 내벽에 대한 접촉 상태를 판별하고자 하는 것이다.
도 20은 PDT 장치의 동작을 나타내는 플로우차트이다.
이 도면에 나타내는 PDT 장치의 동작과, 도 5에 도시하는 PDT 장치의 동작이 서로 다른 점은, 살세포 효과가 없다고 판별(스텝 S113에서 아니오)된 후에 레이저 카테테르(300) 선단의 접촉 상태를 판별하는(스텝 S118) 점이다.
살세포 효과가 없다고 판별(스텝 S113에서 아니오)된 후, 광원(110)은 스텝 S109에서 개시한, 광학계(120)로의 제2 강도로의 여기광의 출력을 이어서 행하고, 제어부(150)는 형광 강도를 산출하고, 표시부(170)는 형광 강도의 경시 변화를 표시 화면에 표시하고 있다. 예를 들면, 표시부(170)는 형광 강도의 경시 변화를 그래프로서 표시 화면에 표시한다.
여기서, 형광 강도의 경시 변화를 나타내는 그래프의 일례에 대하여 설명한다.
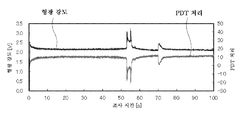
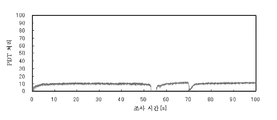
도 21은 형광 강도의 경시 변화를 나타내는 그래프이다.
이 도면은, 이상적인 접촉 상태(수직 접촉 상태)에서 조사를 개시한 예를 나타낸다. 화살표로 나타낸 2군데의 시각에 있어서, 형광 강도가 높은 값을 나타내고 있다. 전술한 바와 같이, 심근 조직 중의 약제 농도보다, 혈중의 약제 농도쪽이 높다. 이 때문에, 시술자는 형광 강도가 높은 값을 나타내는 2군데의 시각에 있어서, 레이저 카테테르(300)의 선단이 심근 조직으로부터 떨어져서 혈액에 접촉한 것을 알 수 있다. 시술자는 이 변화를 검지하면, 핸드 피스 등(도시하지 않음)을 조작함으로써, 레이저 카테테르(300) 선단의 자세를 이상적인 접촉 상태(수직 접촉 상태)로 되돌아간다(스텝 S118에서 아니오). 또한, 레이저 카테테르(300) 선단의 접촉 상태가 양호한 경우에는, 레이저 카테테르(300) 선단의 자세가 제어되지 않고, 제어부(150)는 광학계(120)로의 제2 강도로의 여기광의 출력을 이어서 행하기 위한 제어를 행한다(스텝 S118에서 예). 또한, 이 도면에 나타내는 그래프에는, PDT 진행에 수반하여 생기는 약제의 블리칭(형광량의 감쇠)의 모습도 반영된다.
이와 같이, 본 실시 형태에 따르면, 시술자는 치료광 조사 중에 PDT 진행(살세포 효과)과 접촉 모니터를 동시에 리얼타임으로 감시하고, 레이저 카테테르(300)가 수직 접촉 상태와 서로 다른 자세를 취한 경우에는, 자세를 다시 제어할 수 있다. 그리고, 시술자는 PDT 진행도(살세포 효과)가 충분한 영역에 도달하면, 조사를 정지할 수 있다.
<제6 실시 형태>
상기 제5 실시 형태에서는, 형광의 증가량을 지표로 하여 레이저 카테테르(300) 선단의 접촉 상태를 평가하고, 형광의 감쇠량을 지표로 하여 PDT 진행도(살세포 효과)를 평가하였다. 그러나, 형광의 감쇠량을 지표로 하여 PDT 진행도(살세포 효과)를 평가하는 경우, 치료가 진행함에 따라서 지표가 감소해 간다고 하는 감각적인 부정합을 느끼는 케이스도 있다. 또한, 조사 조건이나 약제 투여 조건의 변동이나 상위를 고려한 후에서의 PDT 진행도(살세포 효과)를 판별하는 방법은 확립되어 있지 않다.
이에 반해, 제6 실시 형태는 조사 조건이나 약제 투여 조건의 변동이나 상위를 고려한 후에, PDT 진행도(살세포 효과)를 평가하고, 동시에 레이저 카테테르(300) 선단의 조직 내벽에 대한 접촉 상태를 판별하고자 하는 것이다.
도 22는 PDT 진행도 및 접촉 상태의 모니터 동작을 나타내는 플로우차트이다.
이 PDT 진행도 및 접촉 상태의 모니터 동작은, 예를 들면 도 5 또는 도 20의 플로우차트에 있어서의 스텝 S113(살세포 효과 판별 동작) 내에서 행해진다.
우선, 제어부(150)는 형광 강도를 바탕으로, PDT 진행도의 현재값(이하, 「현재 진행도」라고 함)을 산출한다(스텝 S201).
여기서, PDT 진행도의 산출 방법에 대하여 설명한다.
도 23은 PDT 진행도를 산출하기 위한 수식을 설명하기 위한 도면이다.
식 중, Pfl은 형광 강도를 나타내고, n은 여기광 조사 횟수를 나타내는 변수이며(예를 들면, 약제 투여 후 15분을 n=1, 16분을 n=2, 16분 30초를 n=3 …으로 함), t는 조사 시간을 나타내는 변수이다. 예를 들면, Pfl 1(0)은 1회째(n=1)의 여기광 조사 개시 시의(t=0) 상태, 즉 여기광 조사 전의 형광 강도(Pfl)의 초기값을 나타낸다. Pref는 약제 투여 전에 여기광을 조사한 경우의 형광 파형의 평균 강도(백그라운드)를 나타낸다. 즉, Pfl 1(0)-Pref는, 약제 투여 후 또한 여기광 조사 전의 소정 시점에서의 형광 강도를 나타내고, 이를 초기값(본 예에서는, 100)으로 하고 있다. 또한, X(㎎/㎏)는 약제 투여량을 나타내는 변수, P(W/㎠)는 여기광 조사 파워를 나타내는 변수이다.
이 평가 방법에서는, 임의의 기준 조건(예를 들면, 약제 투여량 10㎎/㎏, 조사 파워 40W/㎠)으로 약제 투여 전후의 형광 강도차를 100으로 했을 때, 형광 강도가 조사마다 개시 직후로부터 얼마나 감쇠했는지를 시시각각 연산한다. 여기서, 10㎎/㎏은 생체 독성이 없는 범위에 있어서의 최대값으로서 임의로 선택된 값, 40W/㎠는 들러붙기가 매우 적거나 또는 생기지 않는 범위에 있어서의 조사 파워의 최대값으로서 임의로 선택된 값이다. 이러한 약제 투여 시의 농도와 조사 파워의 상관은, 실험적으로 조건을 탐색하여 결정한 표준 조건을 사용하면 된다. 또한, 기준 조건 이외의 조건으로 실시한 경우에도, 치료 효과를 좌우하는 일중항 산소 발생량을 상대 비교할 수 있도록, 약제 투여량과 조사 파워의 팩터를 고려하여 연산할 수 있다.
또는 약제 투여 시의 농도와 조사 파워의 상관을, 실험적으로 조건을 탐색하여 결정한 표준 조건을 사용하지 않고, 아래와 같이 설정해도 된다.
도 24는 PDT 진행도의 산출 방법을 설명하기 위한 도면이다.
치료 대상 조직의 최심층에 있어서의 단위 체적당에 발생한 일중항 산소의 양(도 25의 타원 내)이 세포사를 유발하는 일중항 산소 발생량의 임계값을 초과하도록, 약제 투여 시의 농도(PS dose)와 조사 파워 I를 설정할 필요가 있다. 도 24 및 도 25의 식 중, kx는 반응 속도 상수, τ0은 무산소 분위기 속의 T1의 수명, σ은 흡수 단면적, v는 매질 중 광속, [X]는 물질 X의 농도, T는 각 조사 위치에 있어서의 치료광 총 조사 시간을 나타낸다.
도 25는 약제 투여 시의 농도와 조사 파워를 설정하기 위한 수식을 나타낸다.
식 중, t는 각 위치에 있어서의 조사 시간, t'는 약제 투여로부터의 경과 시간, ρ는 깊이 d에 있어서의 광밀도를 나타낸다. 조직 중의 약제 농도 [S0]t(t)는, 약제 투여 시의 농도(체중에 대한 약제의 양)인 PS dose와 시간 t 및 t'의 함수이지만, 일반적으로는 실측하지 않으면 미지인 경우가 많다. 그러나, 동일 개체의 조직 중 약제 농도의 경시 변화를 실측하는 유용한 방법은 지금까지 존재하지 않는다. 본 실시 형태에 따르면, 리얼타임으로 동일 개체의 조직 내 약제 농도의 경시 변화를 실측할 수 있다.
도 26은 도 23의 수식에 기초하여 산출된 PDT 진행도를 나타내는 그래프이다.
도 23의 수식을 이용하여, 형광 강도(도 21 참조, Fluorescence Intensity)를 PDT 진행도(PDT progress)로 변환할 수 있다. 제어부(150)는 산출한 PDT 진행도를 시간 계측부(도시하지 않음)로부터 취득한 시간 정보에 관련된 로그로서, PDT 진행도의 경시 변화를 기억부(160)에 기록하기 시작한다. 또한, 제어부(150)는 기록된 PDT 진행도 중 최대값을, 최대 진행도로서 기억부(160)에 기록한다. 제어부(150)는 또한 산출한 PDT 진행도와, 각 조사 위치에 있어서의 조사 개시 시각을 기준으로 하여, 그 기준 시각으로부터의 경과 시간을 바탕으로, PDT 진행도의 경시 변화에 관한 표시 정보를 생성하고, 생성한 표시 정보를 포함하는 표시 명령을 표시부(170)에 출력해도 된다. 표시부(170)는 제어부(150)로부터 표시 명령을 취득하면, 표시 명령에 포함되는 표시 정보에 기초하여, PDT 진행도의 경시 변화를 표시 화면에 표시한다. 예를 들면, 표시부(170)는 PDT 진행도의 경시 변화를 도 26 또는 도 27에 도시하는 그래프로서 표시 화면에 표시한다.
도 27은 도 26의 변형예를 나타내는 그래프이다.
이 도면에 도시한 바와 같이, PDT 진행도의 경시 변화의 스케일을 0 ~ 100으로 고정해도 된다. 여기서, 0은 약제 투여 전의 백그라운드, 100은 임의의 기준 시각에 있어서의 하이파워 조사 시의 조사 개시 직후의 형광 최대 강도를 나타내는 것으로 하면 된다.
도 22로 되돌아가서, 제어부(150)는 현재 진행도를 산출하면(스텝 S201), 레이저 카테테르(300) 선단의 접촉 상태의 평가 동작(스텝 S202 ~ 스텝 S205)을 개시한다.
접촉 상태는, 최대 진행도와 현재 진행도의 차분으로부터 평가된다. 여기서, 그 원리에 대하여 설명한다. 레이저 카테테르(300)를 이용하여 심근 조직에 대하여 핀 포인트에 조사를 행하면, 그 부위(심근 조직)에 있어서 약제 소비가 진행하고, 그 결과 형광 강도가 감소한다. 형광 강도가 감소하면, PDT 진행도는 경시적으로 증가하므로, 현재 진행도는 최대값(최대 진행도)을 계속해서 갱신할 것이다. 그러나, 레이저 카테테르(300)가 심근 조직으로부터 어긋나서 혈중에 부유해버리면, 심근 조직보다도 약제 농도가 높은 혈액 중으로부터의 형광 신호가 혼합되어 형광 강도가 증가한다. 형광 강도가 증가하면, PDT 진행도는 저하한다. 그 결과, 레이저 카테테르(300)가 혈중에 부유한 경우에는, 원래 차분이 생기지 말아야 할 현재 진행도와 최대 진행도 사이에 차분이 생긴다. 본 실시 형태에서는, 이 차분을 접촉 상태의 평가에 이용한다.
우선, 제어부(150)는 도 23의 수식에 기초하여 스텝 S201에서 산출된 현재 진행도와, 기억부(160)에 기록된 최대 진행도를 비교한다(스텝 S202). 제어부(150)는 현재 진행도가 최대 진행도 이상이라고 판정하면(스텝 S202에서 예), 기억부(160)에 기록된 최대 진행도를 이 현재 진행도에 의해 갱신한다(스텝 S203).
한편, 제어부(150)가, 현재 진행도가 최대 진행도 미만이라고 판정하는 경우란(스텝 S202에서 아니오), 원래 최대 진행도가 되어야 할 현재 진행도의 값이 최대 진행도보다 저하한 경우이다. 구체적으로는, 레이저 카테테르(300)가 심근 조직으로부터 어긋나서 혈중에 부유해 버려, 혈액 중으로부터의 형광 신호가 혼합되어 형광 강도가 증가한 경우이다.
계속해서, 제어부(150)는 최대 진행도로부터 현재 진행도를 감산한다(스텝 S204). 최대 진행도가 현재 진행도에 의해 갱신된 경우(스텝 S203), 감산 결과가 0이 되고, 이는 레이저 카테테르(300)가 치료광 조사 개시 전에 저파워(제1 강도)로 확인한 접촉 상태(스텝 S106) 또는 조사 개시 직후의 접촉 상태를 유지하고 있는 것을 나타낸다. 한편, 현재 진행도의 값이 최대 진행도보다 저하한 경우(스텝 S202에서 아니오), 감산 결과가 0 보다 커지고, 이는 레이저 카테테르(300)와 심근 조직 사이에 간극이 비어 있는, 즉 보다 경사 접촉 또는 혈액 중에 부유하고 있는 상태로 변화한 것을 나타낸다.
제어부(150)는 감산 결과를 바탕으로, 레이저 카테테르(300) 선단의 접촉 상태에 관한 표시 정보를 생성하고, 생성한 표시 정보를 포함하는 표시 명령을 표시부(170)로 출력한다. 구체적으로는, 제어부(150)는 현재 진행도에 최대 진행도를 시각적으로 반영하여, 현재 진행도와 최대 진행도의 차분에 의해 레이저 카테테르(300) 선단의 접촉 상태를 통지하기 위한 표시 정보를 생성하고, 생성한 표시 정보를 포함하는 표시 명령을 표시부(170)로 출력한다(스텝 S205). 표시부(170)는 제어부(150)로부터 표시 명령을 취득하면, 표시 명령에 포함되는 표시 정보에 기초하여, 레이저 카테테르(300) 선단의 접촉 상태에 관한 정보를 표시 화면에 표시한다. 예를 들면, 표시부(170)는 PDT 진행도 및 레이저 카테테르(300) 선단의 접촉 상태에 관한 정보를 표시 화면에 표시한다.
여기서, PDT 진행도 및 레이저 카테테르(300) 선단의 접촉 상태에 관한 정보의 표시 양태에 대하여 설명한다.
도 28은 PDT 진행도 및 레이저 카테테르(300) 선단의 접촉 상태를 표시하는 표시 화면이다.
도면 중 좌측의 그래프(이하, 시간 파형 표시라 부름)는, PDT 진행도의 경시 변화를 나타내고, 그 스케일은 0 ~ 100으로 고정되어 있다. 도면 중 우측의 지표(이하, 레벨 미터 표시라 부름)는, 현재 진행도와 최대 진행도를 동시에 나타내고, 현재 진행도와 최대 진행도의 차분을 나타낸다. 또한, 현재 진행도를 나타내는 수치(51a.u.)도 동시에 표시된다.
도 28은 최대 진행도와 현재 진행도가 일치하고 있는 예를 나타낸다. 최대 진행도와 현재 진행도가 일치하고 있는 경우, 최대 진행도와 현재 진행도의 차분은 생기지 않으므로 표시되지 않는다. 이에 의해, 시술자는 레이저 카테테르(300) 선단의 접촉 상태가 치료광 조사 개시 전에 저파워(제1 강도)로 확인한 접촉 상태(스텝 S106) 또는 조사 개시 직후의 접촉 상태로부터 변화하지 않는다고 인식할 수 있다.
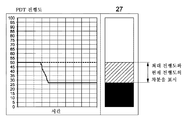
도 29는 PDT 진행도 및 레이저 카테테르(300) 선단의 접촉 상태를 표시하는 다른 표시 화면이다.
이 도면은, 최대 진행도와 현재 진행도의 차분이 생긴 예를 나타낸다. 시간 파형 표시에 있어서, 실선은 PDT 진행도의 경시 변화를 나타내고, 파선은 최대 진행도를 나타낸다. 이 도면에 나타내는 예에서는, 치료 개시 후, 제어부(105)는 최대 진행도를 약 3초간 계속해서 갱신하고, 그 후 현재 진행도가 저하하여 최대 진행도의 차분이 생겼다.
레벨 미터 표시에 있어서, 최대 진행도(약 51a.u.)에 현재 진행도(27a.u.)가 중첩적으로 표시된다. 이에 의해, 시술자는 도면 중 사선으로 나타내지는 범위로서의 최대 진행도와 현재 진행도의 차분을, 레이저 카테테르(300) 선단의 접촉 상태의 변화로서 인식할 수 있다. 구체적으로는, 시술자는 레이저 카테테르(300) 선단의 접촉 상태가 치료광 조사 개시 전에 저파워(제1 강도)로 확인한 접촉 상태(스텝 S106) 또는 조사 개시 직후의 접촉 상태로부터 변화하여, 보다 경사 접촉 상태 또는 비접촉 상태에 있는 것을 인식할 수 있다.
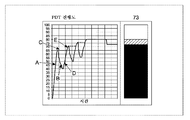
도 30은 PDT 진행도 및 레이저 카테테르(300) 선단의 접촉 상태를 표시하는 다른 표시 화면이다.
시간 파형 표시에 있어서, 치료 개시 후, 제어부(105)는 최대 진행도를 약 1초간 계속해서 갱신한다(화살표 A). 이는, 레이저 카테테르(300)가 치료광 조사 개시 전에 저파워(제1 강도)로 확인한 접촉 상태(스텝 S106) 또는 조사 개시 직후의 접촉 상태를 유지하면서 PDT가 진행하고 있는 모습을 나타낸다. 그 후, 현재 진행도는 잠시 계속해서 내려 간다(화살표 B). 이는, 레이저 카테테르(300)가 심근 조직으로부터 서서히 떨어져서, 혈액에 닿는 레이저 카테테르(300) 선단의 면적이 커져가는 모습을 나타낸다. 그 동안, 제어부(105)는 최대 진행도를 갱신하지 않고, 최대 진행도로서, 현재 진행도가 내려가기 시작하기 직전의 최대 진행도를 계속해서 표시한다(화살표 C). 시술자는 표시 화면을 참조하여 레이저 카테테르(300) 선단의 접촉 상태가 치료광 조사 개시 전에 저파워(제1 강도)로 확인한 접촉 상태(스텝 S106) 또는 조사 개시 직후의 접촉 상태로부터 변화한 것을 인식 하면, 레이저 카테테르(300) 선단의 자세를 제어한다. 그 결과 레이저 카테테르(300)가 수직 접촉 상태로 되돌아가면, 다시 현재 진행도가 잠시 계속해서 오른다(화살표 D). 현재 진행도가 최대 진행도 이상이 되면, 제어부(105)는 최대 진행도를 현재 진행도에 의해 계속해서 갱신한다(화살표 E). 도 30에서는, 이 동작이 반복된 모습을 나타낸다.
레벨 미터 표시에 있어서, 최대 진행도(약 80a.u.)에 현재 진행도(73a.u.)가 중첩적으로 표시된다. 이에 의해, 시술자는 도면 중 사선으로 나타내지는 범위로서의 최대 진행도와 현재 진행도의 차분을, 레이저 카테테르(300) 선단의 접촉 상태의 변화로서 직감적으로 인식할 수 있다. 구체적으로는, 시술자는 레이저 카테테르(300) 선단의 접촉 상태가 치료광 조사 개시 전에 저파워(제1 강도)로 확인한 접촉 상태(스텝 S106) 또는 조사 개시 직후의 접촉 상태로부터 변화하여, 심근 조직으로부터 어긋나서 혈중에 부유하고 있다고 직감적으로 인식할 수 있다.
도 22로 되돌아가, 시술자는 스텝 S205에서 표시된 PDT 진행도 및 레이저 카테테르(300) 선단의 접촉 상태를 참조하여, PDT 진행도 및 접촉 상태의 모니터 동작을 종료하는지의 여부를 판단한다. 시술자는 PDT 진행도 및 접촉 상태의 모니터 동작을 종료하는 경우, 조작부(180)에, 모니터 동작을 종료하기 위한 소정의 입력 조작을 행한다. 조작부(180)는 시술자로부터의 입력 조작에 의한 모니터 동작 종료의 명령을 접수하고, 접수한 명령을 제어부(150)에 출력한다. 제어부(150)는 조작부(180)로부터의 명령에 기초하여, 모니터 동작을 종료한다(스텝 S206에서 예). 한편, 시술자로부터의 조작부(180)에 대한 입력 조작이 행해지지 않으면, 제어부(150)는 계속해서 PDT 진행도 및 접촉 상태의 모니터 동작을 행한다(스텝 S206에서 아니오).
본 실시 형태에 따르면, 제어부(150)는 조직의 변화의 현재 평가 결과(현재 진행도)에 조직의 변화의 최대 평가 결과(최대 진행도)를 시각적으로 반영하여, 조직의 변화의 평가 결과와, 레이저 카테테르(300) 선단의 접촉 상태를 동시에 통지한다. 이에 의해, 시술자는 조직의 변화의 현재 평가 결과(현재 진행도)와, 레이저 카테테르(300) 선단의 접촉 상태를 동시에 직감적으로 인식할 수 있다. 이에 의해, 치료광 조사 중에, 시술자는 심박이나 호흡의 영향 등에 의한 레이저 카테테르(300) 선단의 어긋남을 리얼타임으로 인식하고, 즉석에서 자세를 제어할 수 있다. 동시에, 시술자는 개체차나 치료 부위에 따라 변동된다고 알려져 있는 PDT 진행도를 정확하면서 리얼타임으로 파악하여, 시술할 수 있다. 의사 등의 시술자는 시술 중에 X선 투시 화상 등 복수의 화면을 보고, 모든 것을 판단할 필요가 있다. 이 때문에, 조직의 변화의 현재 평가 결과(현재 진행도)와, 레이저 카테테르(300) 선단의 접촉 상태를 직감적으로 인식 가능한 양태로 표시하는 것은, 시술자가 원활한 시술을 행함에 있어서 유용하다.
<제7 실시 형태>
PDT 진행도 및 레이저 카테테르(300) 선단의 접촉 상태의 표시 양태는, 상기 도 28 내지 도 30에 도시한 표시 양태와 서로 다른 표시 양태여도 된다. 상기 제6 실시 형태는, 현재 진행도에 최대 진행도를 시각적으로 반영하여, 레이저 카테테르(300) 선단의 접촉 상태를 통지하기 위한 표시 화면을 나타냈다. 이에 반해, 제7 실시 형태에서는, 현재 진행도와, 레이저 카테테르(300) 선단의 접촉 상태를 통지하기 위한 정보를 서로 독립하여 표시하는 표시 화면을 나타낸다.
도 31은 PDT 진행도 및 레이저 카테테르(300) 선단의 접촉 상태를 표시하는 다른 표시 화면이다.
도면 중 상단에는, PDT 진행도의 경시 변화를 나타내는 시간 파형 표시와, 현재 진행도를 나타내는 레벨 미터 표시와, 현재 진행도를 나타내는 수치(51)가 표시된다. 도면 중 하단에는, 레이저 카테테르(300) 선단의 접촉 상태로서의 최대 진행도와 현재 진행도의 차분의 경시 변화를 나타내는 시간 파형 표시와, 현재의 레이저 카테테르(300) 선단의 접촉 상태로서의 최대 진행도(51)과 현재 진행도의 차분을 나타내는 레벨 미터 표시와, 접촉 상태를 나타내는 수치(0=51-51)가 표시된다. 여기서, 접촉 상태를 나타내는 수치가 작을수록 레이저 카테테르(300) 선단의 접촉 상태가 변화하지 않고, 수치가 클수록 레이저 카테테르(300) 선단의 접촉 상태가 크게 변화하여, 레이저 카테테르(300)와 심근 조직 사이에 간극이 생기고 있는 것을 알 수 있다. 접촉 상태를 나타내는 수치가 0이기 때문에, 시술자는 레이저 카테테르(300) 선단의 접촉 상태가 변화하지 않는다고 인식할 수 있다.
도 32는 PDT 진행도 및 레이저 카테테르(300) 선단의 접촉 상태를 표시하는 다른 표시 화면이다.
도면 중 상단에는, PDT 진행도의 경시 변화를 나타내는 시간 파형 표시와, 현재 진행도를 나타내는 레벨 미터 표시와, 현재 진행도를 나타내는 수치(27)가 표시된다. 도면 중 하단에는, 레이저 카테테르(300) 선단의 접촉 상태로서의 최대 진행도(51)와 현재 진행도의 차분의 경시 변화를 나타내는 시간 파형 표시와, 현재의 레이저 카테테르(300) 선단의 접촉 상태로서의 최대 진행도와 현재 진행도의 차분을 나타내는 레벨 미터 표시와, 접촉 상태를 나타내는 수치(24=51-27)가 표시된다. 접촉 상태를 나타내는 수치가 24이기 때문에, 시술자는 레이저 카테테르(300) 선단의 접촉 상태가 변화하여 경사 접촉 상태로 된 것을 인식할 수 있다.
<제8 실시 형태>
상기 제6 실시 형태에서는, 카테테르(300) 선단의 접촉 상태를 나타내는 지표로서, PDT의 최대 진행도와 현재 진행도의 차분을 이용하였다. 이에 반해, 제8 실시 형태에서는, 카테테르(300)의 선단의 접촉 상태를 나타내는 지표로서, 형광 강도의 최소값과 현재값의 차분을 이용한다.
이 경우, 도 22의 플로우차트에 있어서, 스텝 S201을 생략하고, 우선, 제어부(150)는 형광 강도의 현재값과 최소값을 비교한다(스텝 S202). 제어부(150)는 형광 강도의 현재값이 최소값 이하라고 판정하면(스텝 S202에서 예), 형광 강도의 최소값을 이 현재값에 의해 갱신한다(스텝 S203).
한편, 제어부(150)가, 형광 강도의 현재값이 최소값보다 크다고 판정하는 경우란(스텝 S202에서 아니오), 원래 최소값이 되어야 할 형광 강도의 현재값이 최소값보다 상승한 경우이다. 구체적으로는, 레이저 카테테르(300)가 심근 조직으로부터 어긋나서 혈중에 부유해 버려, 혈액 중으로부터의 형광 신호가 혼합되어 형광 강도가 증가한 경우이다.
계속해서, 제어부(150)는 형광 강도의 현재값으로부터 최소값을 감산한다(스텝 S204). 감산 결과가 0이다란, 레이저 카테테르(300)가 이상적인 접촉 상태(수직 접촉 상태)인 것을 나타낸다. 한편, 감산 결과가 0보다 크다란, 레이저 카테테르(300)가 심근 조직으로부터 어긋나서 혈중에 부유하고 있는 것을 나타낸다.
계속해서, 제어부(150)는 형광 강도의 현재값에 최소값을 시각적으로 반영하여, 레이저 카테테르(300) 선단의 접촉 상태를 통지하기 위한 표시 정보를 생성하고, 생성한 표시 정보를 포함하는 표시 명령을 표시부(170)로 출력한다(스텝 S205).
<제9 실시 형태>
상기 제6 실시 형태에서는, 치료를 행할 때에 이용되는 고파워의 제2 강도로 여기광을 출력 중에, 레이저 카테테르(300) 선단의 조직 내벽에 대한 접촉 상태를 직감적으로 표시하였다. 이에 반해, 제9 실시 형태에서는, 저파워의 제1 강도로 여기광을 출력 중에, 레이저 카테테르(300) 선단의 조직 내벽에 대한 접촉 상태를 직감적으로 표시한다.
이 저파워 접촉 모니터 동작은, 약제를 정맥 주사에 의해 투여하고 나서 제2 강도의 여기광의 출력에 의해 치료를 개시할 때까지의 대기 시간(인터벌 시간) 중에 행해진다. 예를 들면, 이 저파워 접촉 모니터 동작은, 도 5 또는 도 20의 플로우차트에 있어서의 스텝 S104(약제 농도 모니터 동작)나 스텝 S106, S107(접촉 모니터 동작) 내에서 행해진다. 또한, 이 저파워 접촉 모니터 동작은, 제2 강도로 여기광을 출력하기 전에, 즉 치료를 행하기 전에, 매회 행해도 되고, 생략해도 된다. 또한, 환자가 사람인 경우에는, 치료 시간이 3시간 등으로 장기간에 걸친 경우에는, 재교정으로서, 저파워 접촉 모니터 동작을 다시 행해도 된다. 그러나, 기본적으로 상정되는 표준 방법 시간 중에는 약제 농도는 거의 일정하다고 생각해도 되기 때문에, 저파워 접촉 모니터 동작은, 약제를 정맥 주사에 의해 투여하고 나서 제2 강도의 여기광의 출력에 의해 치료를 개시할 때까지의 대기 시간(인터벌 시간) 중에 행하면 된다.
도 33은 레이저 카테테르(300) 선단의 조직 내벽에 대한 접촉도를 산출하기 위한 수식을 나타낸다. 도 34는 이 접촉도의 산출 방법을 설명하기 위한 도면이다.
도면 중, Pfl b는 비접촉 상태의 형광 강도 즉 혈액(blood) 중의 형광 강도, Pfl t는 수직 접촉 상태의 형광 강도 즉 조직(tissue) 중의 형광 강도, P(t)는 임의의 접촉 상태의 형광 강도를 나타낸다.
우선, 시술자는 약제 투여 후, 레이저 카테테르(300)의 선단부를 조직에 대하여 비접촉 상태로 배치한다. 제어부(150)는 시술자로부터의 조작부(180)를 개재한 여기광 출력 명령을 취득하면, 광원(110)에 제1 강도로의 여기광 출력 명령을 출력하고, 검출부(130)로부터 취득한 전기 신호를 바탕으로, 비접촉 상태의 형광 강도, 즉 혈액 중의 형광 강도 Pfl b를 산출한다(도 34, 점A). 계속해서, 시술자는 레이저 카테테르(300)의 선단부를 조직에 대하여 수직 접촉 상태로 배치한다. 상기와 마찬가지로, 제어부(150)는 수직 접촉 상태의 형광 강도, 즉 조직 중의 형광 강도 Pfl t를 산출한다(도 34, 점 B). 제어부(150)는 산출한 혈액 중의 형광 강도 Pfl b로부터 조직 중의 형광 강도 Pfl t를 감산하고, 산출한 값 (Pfl b-Pfl t)을 접촉도의 최대값으로 한다.
계속해서, 시술자는 치료를 행하기 위해, 레이저 카테테르(300)의 선단부를 조직에 대하여 임의의 자세로 접촉시킨다. 제어부(150)는 시술자로부터의 조작부(180)를 개재한 여기광 출력 명령을 취득하면, 광원(110)에 제1 강도로의 여기광 출력 명령을 출력하고, 검출부(130)로부터 취득한 전기 신호를 바탕으로, 이 임의의 자세로 접촉 상태에서의 형광 강도 P(t)를 산출한다(도 34, 점C). 제어부(150)는 산출한 형광 강도를 시간 계측부(도시하지 않음)로부터 취득한 시간 정보에 관련된 로그로 하여, 형광 강도의 경시 변화를 기억부(160)에 기록하기 시작한다. 제어부(150)는 상기 혈액 중의 형광 강도 Pfl b로부터 산출한 형광 강도 P(t)를 감산하고, 산출한 값 (Pfl b-P(t))을, 접촉도의 최대값에 대한 현재의 접촉도로 한다.
제어부(150)는 도 33의 수식에 기초하여 산출한 레이저 카테테르(300) 선단의 접촉도를 직감적으로 인식 가능한 양태로 표시한다. 예를 들면, 제어부(150)는 도 34에 도시한 바와 같이, 접촉도의 최대값을 나타내는 대역에, 현재의 접촉도의 값까지의 범위를 중첩적으로 표시하는 양태로, 접촉도를 직감적으로 인식 가능한 양태로 표시부(170)에 의해 표시 화면에 표시시키면 된다(레벨 미터 표시).
또는 제어부(150)는 접촉도의 경시 변화와, 현재의 접촉도를 직감적으로 인식 가능한 양태로서의, 시간 파형 표시 및 레벨 미터 표시를, 표시부(170)에 의해 표시 화면에 표시시켜도 된다. 또한 도 33의 수식으로 연산한 접촉도를 수치 표시해도 된다.
도 35는 접촉도의 시간 파형 표시 및 레벨 미터 표시를 나타내는 표시 화면이다.
시간 파형 표시에 있어서, 레이저 카테테르(300)의 선단부의 조직에 대한 접촉도의 경시 변화를 0 ~ 100의 스케일로 표시함으로써, 시술자는 심박이나 호흡의 영향 등에 의한 레이저 카테테르(300)의 선단부의 어긋남을 인식하고, 즉석에서 자세를 제어할 수 있다. 또한, 레벨 미터 표시에 있어서, 현재의 레이저 카테테르(300) 선단의 접촉도를 직감적으로 인식 가능한 양태로 표시함으로써, 시술자는 실제로는 목시할 수 없는 현재의 레이저 카테테르(300) 선단의 접촉 상태를, 직감적으로 인식할 수 있다. 또한, 접촉도가 최대값(본 예에서는, 100)을 초과한 경우에는, 접촉도가 최대값인 것으로서 표시하면 된다. 또한, 현재의 접촉도에 관해서만 표시해도 된다.
여기서, 접촉도와 레이저 카테테르(300)의 선단부의 조직에 대한 접촉 상태의 관계에 대하여 설명한다.
도 36은 도 35에 도시하는 서로 다른 복수의 접촉도에 있어서의 레이저 카테테르의 접촉 상태를 도시하는 모식도이다.
이 도면에 도시한 바와 같이, 레이저 카테테르(300)의 선단부와 조직 사이에 혈액(15)이 개재하여, 선단부가 혈중에 존재하는 비접촉 상태에 있어서, 도 33의 수식에 기초하여 산출한 레이저 카테테르(300) 선단의 접촉도는, 예를 들면 12이다. 레이저 카테테르(300)의 선단부가 조직에 대하여 경사져서 접촉하고, 선단부와 조직의 간극에 부분적으로 혈액(15)이 존재하는 경사져서 접촉 상태에 있어서, 접촉도는, 예를 들면 55이다. 레이저 카테테르(300)의 선단부가 심근 조직(11)의 내벽에 수직으로 접촉하도록 배치되는 수직 접촉 상태에 있어서, 접촉도는, 예를 들면 100이다. 시술자는 이들 접촉도의 값을 시간 파형 표시 및 레벨 미터 표시에 의해 시각적으로 인식함으로써, 현재의 레이저 카테테르(300) 선단의 접촉 상태를, 직감적으로 인식할 수 있다. 그리고, 시술자는 심박이나 호흡의 영향 등에 의한 레이저 카테테르(300)의 선단부의 어긋남을 인식하고, 즉석에서 자세를 제어할 수 있다.
본 발명에 따른 실시 형태는, 이상 설명한 실시 형태에 한정되지 않고, 다른 여러 형태가 생각된다.
상기 실시 형태에서는, 레이저 카테테르(300)를 PDT 장치(1)의 커넥터(210)에 착탈 가능하게 접속했지만, 레이저 카테테르(300)를 PDT 장치(1)에 일체로 설치해도 된다.
상기 실시 형태에서는, PDT 장치 본체(100)에 튜브(200)를 설치하고, 튜브(200)의 선단에 커넥터(210)를 설치했지만, 커넥터(210)를 PDT 장치 본체(100)에 설치해도 된다.
상기 실시 형태에서는, PBS(123)을 이용했지만, 이 대신에 DM을 이용해도 된다.
상기 실시 형태에서는, 제어부(150)는 시술자에게 소정의 제어를 재촉하는 정보를 표시부(170)에 의해 통지했지만, 이에 한정되지 않는다. PDT 장치(1)에 스피커부를 설치하고, 제어부(150)는 시술자에게 소정의 제어를 재촉할 때, 음성 출력 명령을 생성하고, 생성한 음성 출력 명령을 스피커부에 출력하여 스피커부에 음성을 출력시킴으로써 시술자에게 소정의 제어를 재촉해도 된다.
1 : 광선 역학적 치료(Photodynamic Therapy, PDT) 장치
100 : PDT 장치 본체
110 : 광원
120, 120a : 광학계
121 : 숏 패스 필터
122 : 제1 렌즈
123 : 편광 빔 스플리터(PBS)
124 : 롱 패스 필터
125 : 제2 렌즈
126 : 제1 다이크로익 미러(DM)
127 : 제2 다이크로익 미러(DM)
130, 130a : 검출부
131 : 제1 포토다이오드(PD)
132 : 제2 포토다이오드(PD)
140 : 심전 취득부
141 : 전극 패드
150 : 제어부
160 : 기억부
170 : 표시부
180 : 조작부
200 : 튜브
201 : 장치 부속 광 파이버
210 : 커넥터
300 : 레이저 카테테르
301 : 조사광
310 : 카테테르 튜브
320 : 지지부
330 : 광 파이버
340 : 광학 윈도우
100 : PDT 장치 본체
110 : 광원
120, 120a : 광학계
121 : 숏 패스 필터
122 : 제1 렌즈
123 : 편광 빔 스플리터(PBS)
124 : 롱 패스 필터
125 : 제2 렌즈
126 : 제1 다이크로익 미러(DM)
127 : 제2 다이크로익 미러(DM)
130, 130a : 검출부
131 : 제1 포토다이오드(PD)
132 : 제2 포토다이오드(PD)
140 : 심전 취득부
141 : 전극 패드
150 : 제어부
160 : 기억부
170 : 표시부
180 : 조작부
200 : 튜브
201 : 장치 부속 광 파이버
210 : 커넥터
300 : 레이저 카테테르
301 : 조사광
310 : 카테테르 튜브
320 : 지지부
330 : 광 파이버
340 : 광학 윈도우
Claims (24)
- 여기광을 흡수하여 형광을 발하는 광감수성 약제가 도입된 조직에, 레이저 카테테르의 선단부로부터 상기 여기광을 조사하는 장치로서,
상기 레이저 카테테르가 착탈 가능한 접속부와,
상기 접속부를 거쳐서 상기 레이저 카테테르에 상기 여기광을 출력하는 광원과,
상기 레이저 카테테르의 선단부로부터 조사된 여기광과 상기 조직에 도입된 광감수성 약제와의 반응에 의한 상기 조직의 변화를 평가하기 위해서, 상기 레이저 카테테르로부터 상기 접속부를 거쳐서 입사한 상기 형광의 강도를 검출하는 검출부를 구비하는, 평가 장치. - 제1항에 있어서,
상기 검출부는, 상기 레이저 카테테르의 선단부로부터 조사된 여기광과 상기 조직에 도입된 광감수성 약제와의 반응에 의한 상기 조직의 변화와, 상기 레이저 카테테르의 선단부의 상기 조직에 대한 접촉 상태의 변화를 동시에 평가하기 위해서, 상기 레이저 카테테르로부터 상기 접속부를 거쳐서 입사한 상기 형광의 강도를 검출하는, 평가 장치. - 제2항에 있어서,
상기 검출된 형광의 강도에 따라서, 상기 레이저 카테테르의 선단부로부터 조사된 여기광과 상기 조직에 도입된 광감수성 약제와의 반응에 의한 상기 조직의 변화와, 상기 레이저 카테테르의 선단부의 상기 조직에 대한 접촉 상태를 동시에 평가하는 제어부를 더 구비하는, 평가 장치. - 제3항에 있어서,
상기 제어부는, 상기 조직의 변화의 최대 평가 결과에 상기 조직의 변화의 현재 평가 결과를 시각적으로 반영하여, 상기 조직의 변화의 평가 결과와, 상기 접촉 상태의 평가 결과를 동시에 통지하기 위한 신호를 출력하는, 평가 장치. - 제4항에 있어서,
상기 조직의 변화의 최대 평가 결과를 기억하는 기억부를 더 구비하고,
상기 제어부는, 상기 조직의 변화의 현재 평가 결과를 상기 기억부에 기록하고, 상기 조직의 변화의 현재 평가 결과가 상기 기억부에 기록된 상기 조직의 변화의 최대 평가 결과 이상일 때, 상기 기억부에 기록된 상기 조직의 변화의 최대 평가 결과를 상기 조직의 변화의 현재 평가 결과에 의해 갱신하고, 상기 갱신한 조직의 변화의 최대 평가 결과에 상기 조직의 변화의 현재 평가 결과를 중첩적으로 표시함으로써 상기 조직의 변화의 평가 결과와 상기 접촉 상태의 평가 결과를 동시에 통지하기 위한 신호를 출력하는, 평가 장치. - 제1항에 있어서,
상기 검출된 형광의 강도에 따라서, 상기 레이저 카테테르의 선단부로부터 조사된 여기광과 상기 조직에 도입된 광감수성 약제와의 반응에 의한 상기 조직의 변화를 평가하는 제어부를 더 구비하는, 평가 장치. - 제6항에 있어서,
상기 제어부는 상기 평가 결과에 따라서 상기 조직의 변화를 통지하기 위한 신호를 출력하는, 평가 장치. - 제6항에 있어서,
상기 제어부는 상기 평가 결과에 따라서 상기 여기광의 조사 조건의 변경을 재촉하기 위한 신호를 출력하는, 평가 장치. - 제6항에 있어서,
상기 제어부는 심전 신호를 취득하고, 상기 심전 신호와 상기 형광의 강도의 상관에 따라서 상기 조직의 변화를 평가하는, 평가 장치. - 여기광을 흡수하여 형광을 발하는 광감수성 약제가 도입된 심근 조직에, 레이저 카테테르의 선단부로부터 상기 여기광을 조사하는 장치로서,
상기 레이저 카테테르가 착탈 가능한 접속부와,
상기 접속부를 거쳐서 상기 레이저 카테테르에 상기 여기광을 출력하는 광원과,
상기 레이저 카테테르의 선단부로부터 조사된 여기광과 상기 심근 조직에 도입된 광감수성 약제와의 반응에 의한 상기 심근 조직의 변화를 평가하기 위해서, 상기 레이저 카테테르로부터 상기 접속부를 거쳐서 입사한 상기 형광의 강도를 검출하는 검출부를 구비하는, 심방 세동 치료용 평가 장치. - 제10항에 있어서,
상기 검출부는, 상기 레이저 카테테르의 선단부로부터 조사된 여기광과 상기 심근 조직에 도입된 광감수성 약제와의 반응에 의한 상기 심근 조직의 변화와, 상기 레이저 카테테르의 선단부의 상기 심근 조직에 대한 접촉 상태를 동시에 평가하기 위해서, 상기 레이저 카테테르로부터 상기 접속부를 거쳐서 입사한 상기 형광의 강도를 검출하는, 평가 장치. - 제11항에 있어서,
상기 검출된 형광의 강도에 따라서, 상기 레이저 카테테르의 선단부로부터 조사된 여기광과 상기 심근 조직에 도입된 광감수성 약제와의 반응에 의한 상기 심근 조직의 변화와, 상기 레이저 카테테르의 선단부의 상기 심근 조직에 대한 접촉 상태를 동시에 평가하는 제어부를 더 구비하는, 평가 장치. - 제12항에 있어서,
상기 제어부는 상기 심근 조직의 변화의 현재 평가 결과에 상기 심근 조직의 변화의 최대 평가 결과를 시각적으로 반영하여, 상기 조직의 변화의 평가 결과와, 상기 접촉 상태의 평가 결과를 동시에 통지하기 위한 신호를 출력하는, 평가 장치. - 제13항에 있어서,
상기 심근 조직의 변화의 최대 평가 결과를 기억하는 기억부를 더 구비하고,
상기 제어부는, 상기 심근 조직의 변화의 현재 평가 결과를 상기 기억부에 기록하고, 상기 심근 조직의 변화의 현재 평가 결과가 상기 기억부에 기록된 상기 심근 조직의 변화의 최대 평가 결과 이상일 때, 상기 기억부에 기록된 상기 심근 조직의 변화의 최대 평가 결과를 상기 심근 조직의 변화의 현재 평가 결과에 의해 갱신하고, 상기 갱신한 심근 조직의 변화의 최대 평가 결과에 상기 심근 조직의 변화의 현재 평가 결과를 중첩적으로 표시함으로써 상기 심근 조직의 변화의 평가 결과와 상기 접촉 상태의 평가 결과를 동시에 통지하기 위한 신호를 출력하는, 평가 장치. - 여기광을 흡수하여 형광을 발하는 광감수성 약제가 도입된 조직에 대하여 레이저 카테테르의 선단부로부터 상기 여기광을 조사하고,
상기 조사된 여기광에 따른 상기 형광을 상기 레이저 카테테르를 거쳐서 취출하고,
상기 취출된 형광의 강도에 따라서, 상기 레이저 카테테르의 선단부로부터 조사된 여기광과 상기 조직에 도입된 광감수성 약제와의 반응에 의한 상기 조직의 변화를 평가하는, 평가 방법. - 제15항에 있어서,
상기 취출된 형광의 강도에 따라서, 상기 레이저 카테테르의 선단부로부터 조사된 여기광과 상기 조직에 도입된 광감수성 약제와의 반응에 의한 상기 조직의 변화와, 상기 레이저 카테테르의 선단부의 상기 조직에 대한 접촉 상태를 동시에 평가하는, 평가 방법. - 제16항에 있어서, 또한
상기 조직의 변화의 최대 평가 결과에 상기 조직의 변화의 현재 평가 결과를 시각적으로 반영하여, 상기 조직의 변화의 평가 결과와, 상기 접촉 상태의 평가 결과를 동시에 통지하기 위한 신호를 출력하는, 평가 방법. - 제17항에 있어서,
상기 조직의 변화의 현재 평가 결과를 기억부에 기록하고, 상기 조직의 변화의 현재 평가 결과가 상기 기억부에 기록된 상기 조직의 변화의 최대 평가 결과 이상일 때, 상기 기억부에 기록된 상기 조직의 변화의 최대 평가 결과를 상기 조직의 변화의 현재 평가 결과에 의해 갱신하고, 상기 갱신한 조직의 변화의 최대 평가 결과에 상기 조직의 변화의 현재 평가 결과를 중첩적으로 표시함으로써 상기 조직의 변화의 평가 결과와 상기 접촉 상태의 평가 결과를 동시에 통지하기 위한 신호를 출력하는, 평가 방법. - 제15항에 있어서,
심전 신호를 취득하고, 상기 심전 신호와 상기 형광의 강도의 상관에 따라서 상기 조직의 변화를 평가하는, 평가 방법. - 여기광을 흡수하여 형광을 발하는 광감수성 약제와, 선단부로부터 상기 여기광을 조사 가능한 레이저 카테테르와, 상기 레이저 카테테르가 착탈 가능한 접속부 및 상기 접속부를 거쳐서 상기 레이저 카테테르에 상기 여기광을 출력하는 광원을 갖는 평가 장치를 사용하는 평가 방법으로서,
상기 광감수성 약제를 조직에 도입하고,
상기 접속부에 장착되는 상기 레이저 카테테르의 선단부를 상기 광감수성 약제가 도입된 조직으로 유도하고,
상기 광감수성 약제가 도입된 조직에 대하여 상기 레이저 카테테르의 선단부로부터, 상기 광원으로부터 출력된 여기광을 조사하고,
상기 조사된 여기광에 따른 상기 형광을 상기 레이저 카테테르를 거쳐서 취출하고,
상기 취출된 형광의 강도에 따라서, 상기 레이저 카테테르의 선단부로부터 조사된 여기광과 상기 조직에 도입된 광감수성 약제와의 반응에 의한 상기 조직의 변화를 평가하는, 평가 방법. - 제20항에 있어서,
상기 취출된 형광의 강도에 따라서, 상기 레이저 카테테르의 선단부로부터 조사된 여기광과 상기 조직에 도입된 광감수성 약제와의 반응에 의한 상기 조직의 변화와, 상기 레이저 카테테르의 선단부의 상기 조직에 대한 접촉 상태를 동시에 평가하는, 평가 방법. - 제21항에 있어서,
상기 조직의 변화의 최대 평가 결과에 상기 조직의 변화의 현재 평가 결과를 시각적으로 반영하여, 상기 조직의 변화의 평가 결과와, 상기 접촉 상태의 평가 결과를 동시에 통지하기 위한 신호를 더 출력하는, 평가 방법. - 제22항에 있어서,
상기 조직의 변화의 현재 평가 결과를 기억부에 기록하고, 상기 조직의 변화의 현재 평가 결과가 상기 기억부에 기록된 상기 조직의 변화의 최대 평가 결과 이상일 때, 상기 기억부에 기록된 상기 조직의 변화의 최대 평가 결과를 상기 조직의 변화의 현재 평가 결과에 의해 갱신하고, 상기 갱신한 조직의 변화의 최대 평가 결과에 상기 조직의 변화의 현재 평가 결과를 중첩적으로 표시함으로써 상기 조직의 변화의 평가 결과와 상기 접촉 상태의 평가 결과를 동시에 통지하기 위한 신호를 출력하는, 평가 방법. - 제20항에 있어서,
심전 신호를 취득하고, 상기 심전 신호와 상기 형광의 강도의 상관에 따라서 상기 조직의 변화를 평가하는, 평가 방법.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010058385 | 2010-03-15 | ||
| JPJP-P-2010-058385 | 2010-03-15 | ||
| JP2010275511A JP5719159B2 (ja) | 2010-03-15 | 2010-12-10 | 評価装置 |
| JPJP-P-2010-275511 | 2010-12-10 | ||
| PCT/JP2011/001330 WO2011114653A1 (ja) | 2010-03-15 | 2011-03-07 | 評価装置及び評価方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20130052539A true KR20130052539A (ko) | 2013-05-22 |
Family
ID=44648769
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020127023300A KR20130052539A (ko) | 2010-03-15 | 2011-03-07 | 평가 장치 및 평가 방법 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US9277865B2 (ko) |
| EP (1) | EP2548616B1 (ko) |
| JP (1) | JP5719159B2 (ko) |
| KR (1) | KR20130052539A (ko) |
| CN (1) | CN102791329B (ko) |
| SG (1) | SG183946A1 (ko) |
| WO (1) | WO2011114653A1 (ko) |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5635282B2 (ja) * | 2010-03-15 | 2014-12-03 | ソニー株式会社 | 判別装置 |
| US9014789B2 (en) | 2011-09-22 | 2015-04-21 | The George Washington University | Systems and methods for visualizing ablated tissue |
| KR20140102643A (ko) | 2011-09-22 | 2014-08-22 | 더 조지 워싱턴 유니버시티 | 절제된 조직을 시각화하기 위한 시스템 및 방법 |
| US20150038837A1 (en) | 2012-04-05 | 2015-02-05 | Sbi Pharmaceuticals Co., Ltd. | Device for determining metastasis of cancer to sentinel lymph node |
| JP2017000838A (ja) * | 2012-06-01 | 2017-01-05 | ソニー株式会社 | 医療用装置及び制御方法 |
| CN104519782A (zh) * | 2012-08-23 | 2015-04-15 | 思佰益药业股份有限公司 | 具备准直器的光动力学诊断装置 |
| JP2014221117A (ja) * | 2013-05-13 | 2014-11-27 | 株式会社アライ・メッドフォトン研究所 | 治療進行度モニタ装置及びその方法 |
| JP2015089489A (ja) * | 2013-11-07 | 2015-05-11 | 株式会社アライ・メッドフォトン研究所 | 医療用具及び光線治療装置 |
| US11096584B2 (en) | 2013-11-14 | 2021-08-24 | The George Washington University | Systems and methods for determining lesion depth using fluorescence imaging |
| EP3071095A4 (en) | 2013-11-20 | 2017-07-26 | The George Washington University | Systems and methods for hyperspectral analysis of cardiac tissue |
| JP5864674B2 (ja) * | 2014-05-29 | 2016-02-17 | シャープ株式会社 | 測定プローブ、測定装置およびアタッチメント機構 |
| KR102612185B1 (ko) | 2014-11-03 | 2023-12-08 | 460메디컬, 인크. | 접촉 품질의 평가를 위한 시스템 및 방법 |
| JP2017537681A (ja) * | 2014-11-03 | 2017-12-21 | ザ・ジョージ・ワシントン・ユニバーシティThe George Washingtonuniversity | 損傷評価システム及びその方法 |
| US10779904B2 (en) | 2015-07-19 | 2020-09-22 | 460Medical, Inc. | Systems and methods for lesion formation and assessment |
| US10835629B2 (en) * | 2016-10-07 | 2020-11-17 | Research Foundation Of The City University Of New York | Singlet oxygen generating device for selective destruction of pathogens |
| US11918823B2 (en) | 2016-10-07 | 2024-03-05 | Research Foundation Of The City University Of New York | Singlet oxygen generating device for selective destruction of pathogens |
| KR102030237B1 (ko) * | 2017-08-02 | 2019-10-08 | 재단법인 아산사회복지재단 | 광섬유를 이용한 선단의 압력 감지 카테터 및 카테터 시스템 |
| JP6897483B2 (ja) * | 2017-10-18 | 2021-06-30 | 株式会社ニコン | 光照射装置、光照射プログラム、及び光照射装置の駆動方法 |
| JP7066850B2 (ja) * | 2018-07-10 | 2022-05-13 | オリンパス株式会社 | 光治療支援装置、光治療システムおよび光治療支援方法 |
| CN113423354B (zh) * | 2019-02-28 | 2024-10-18 | 奥林巴斯株式会社 | 医疗用系统、能量控制方法和处理器 |
| EP4023287A4 (en) * | 2019-08-27 | 2023-05-17 | Shimadzu Corporation | TREATMENT SUPPORT DEVICE AND THERAPEUTIC LIGHT CONTROL METHOD |
| WO2021142368A1 (en) | 2020-01-08 | 2021-07-15 | 460Medical, Inc. | Systems and methods for optical interrogation of ablation lesions |
| WO2022041102A1 (zh) * | 2020-08-28 | 2022-03-03 | 深圳大学 | 一种基于光动力治疗系统的治疗方法及光动力治疗系统 |
| CN117222449A (zh) * | 2021-04-30 | 2023-12-12 | 奥林巴斯株式会社 | 光治疗进度测定方法、光治疗进度测定装置以及光治疗系统 |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5350375A (en) * | 1993-03-15 | 1994-09-27 | Yale University | Methods for laser induced fluorescence intensity feedback control during laser angioplasty |
| US5851225A (en) * | 1994-03-18 | 1998-12-22 | Spectra Science Corporation | Photoemitting catheters and other structures suitable for use in photo-dynamic therapy and other applications |
| US6572609B1 (en) | 1999-07-14 | 2003-06-03 | Cardiofocus, Inc. | Phototherapeutic waveguide apparatus |
| GB9521784D0 (en) * | 1995-10-24 | 1996-01-03 | Rosslyn Medical Ltd | Diagnostic apparatus |
| JPH10216252A (ja) * | 1997-02-07 | 1998-08-18 | Hamamatsu Photonics Kk | ガン治療装置 |
| US6602274B1 (en) * | 1999-01-15 | 2003-08-05 | Light Sciences Corporation | Targeted transcutaneous cancer therapy |
| US6514277B1 (en) * | 1999-06-11 | 2003-02-04 | Photonics Research Ontario | Fiber optic multitasking probe |
| JP2001004542A (ja) * | 1999-06-24 | 2001-01-12 | Hamamatsu Photonics Kk | 一重項酸素検出装置とこれを用いた光線力学的治療装置 |
| CA2325036A1 (en) | 1999-10-29 | 2001-04-29 | Advanced Sensor Technology, Llc | Optical fiber navigation system |
| DE10009797B4 (de) | 2000-03-01 | 2008-05-15 | Valeo Auto-Electric Wischer Und Motoren Gmbh | Scheibenwischervorrichtung zum Wischen von Scheiben |
| US6542524B2 (en) * | 2000-03-03 | 2003-04-01 | Charles Miyake | Multiwavelength laser for illumination of photo-dynamic therapy drugs |
| US6749623B1 (en) * | 2000-03-31 | 2004-06-15 | Richard A Hsi | Method and apparatus for catheter phototherapy with dose sensing |
| JP2005527493A (ja) * | 2002-01-23 | 2005-09-15 | ライト サイエンシーズ コーポレイション | 光線力学療法のためのシステムおよび方法 |
| WO2004112902A1 (ja) * | 2003-06-20 | 2004-12-29 | Keio University | 光線力学的治療装置、光線力学的治療装置の制御方法、および光線力学的治療方法 |
| CA2553165A1 (en) | 2004-01-29 | 2005-08-11 | Ekos Corporation | Method and apparatus for detecting vascular conditions with a catheter |
| JP2006167046A (ja) | 2004-12-14 | 2006-06-29 | Susumu Terakawa | 癌治療状況評価方法および装置ならびに癌治療方法および装置 |
| US8182433B2 (en) | 2005-03-04 | 2012-05-22 | Endosense Sa | Medical apparatus system having optical fiber load sensing capability |
| JP2007271503A (ja) * | 2006-03-31 | 2007-10-18 | Nikon Corp | 細胞機能の評価方法、細胞機能の評価システム、蛍光顕微鏡システム、光治療方法、及び光治療システム |
| US8048063B2 (en) | 2006-06-09 | 2011-11-01 | Endosense Sa | Catheter having tri-axial force sensor |
| KR20090049051A (ko) | 2006-06-30 | 2009-05-15 | 아테로메드, 아이엔씨. | 죽종절제술 장치 및 방법 |
| JP3984280B1 (ja) | 2006-11-30 | 2007-10-03 | 株式会社サイエンスラボラトリーズ | 化学修飾フラーレンおよびその製造方法,化学修飾フラーレンを含有するプロトン伝導膜 |
| CN101594827B (zh) * | 2006-11-30 | 2012-09-05 | 学校法人庆应义墪 | 利用光动力治疗(pdt)来阻断异常电传导的装置 |
| US8480662B2 (en) * | 2007-08-22 | 2013-07-09 | Cardiac Pacemakers, Inc. | Systems and devices for photoablation |
| US8500730B2 (en) | 2007-11-16 | 2013-08-06 | Biosense Webster, Inc. | Catheter with omni-directional optical tip having isolated optical paths |
| AT11794U1 (de) * | 2010-03-25 | 2011-05-15 | Abdula Kurkayev | Einrichtung zur photodynamischen therapie des gewebes eines lebewesens |
| US20120209125A1 (en) * | 2011-02-10 | 2012-08-16 | Physical Sciences, Inc. | Singlet Oxygen Production and Dosimetry for Photodynamic Therapy |
-
2010
- 2010-12-10 JP JP2010275511A patent/JP5719159B2/ja not_active Expired - Fee Related
-
2011
- 2011-03-07 KR KR1020127023300A patent/KR20130052539A/ko not_active Application Discontinuation
- 2011-03-07 EP EP11755846.0A patent/EP2548616B1/en not_active Not-in-force
- 2011-03-07 US US13/583,531 patent/US9277865B2/en not_active Expired - Fee Related
- 2011-03-07 CN CN201180013008.6A patent/CN102791329B/zh not_active Expired - Fee Related
- 2011-03-07 SG SG2012066239A patent/SG183946A1/en unknown
- 2011-03-07 WO PCT/JP2011/001330 patent/WO2011114653A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| CN102791329A (zh) | 2012-11-21 |
| SG183946A1 (en) | 2012-10-30 |
| WO2011114653A1 (ja) | 2011-09-22 |
| US20130123642A1 (en) | 2013-05-16 |
| EP2548616B1 (en) | 2015-10-07 |
| EP2548616A4 (en) | 2013-08-28 |
| JP5719159B2 (ja) | 2015-05-13 |
| US9277865B2 (en) | 2016-03-08 |
| JP2011212423A (ja) | 2011-10-27 |
| EP2548616A1 (en) | 2013-01-23 |
| CN102791329B (zh) | 2016-01-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5719159B2 (ja) | 評価装置 | |
| JP5635282B2 (ja) | 判別装置 | |
| US20080125634A1 (en) | Method and apparatus for identifying and treating myocardial infarction | |
| US20130289672A1 (en) | Laser therapy apparatus, laser therapy system, and determination method | |
| WO2014185372A1 (ja) | 治療進行度モニタ装置及びその方法 | |
| WO2007146286A2 (en) | Device and methods for the detection of locally-weighted tissue ischemia | |
| JP2014526283A (ja) | 血管内のイメージング及びフラッシングのための方法 | |
| JP5736116B2 (ja) | 算出装置 | |
| CN110811543A (zh) | 使用光信号分析的脑凝块表征和对应的支架选择 | |
| JP2015089489A (ja) | 医療用具及び光線治療装置 | |
| KR102049145B1 (ko) | 색소 병변의 진단 시스템 및 방법 | |
| Baldini et al. | Optical-fiber medical sensors | |
| US11751938B2 (en) | Ablation catheter with blood perfusion sensor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WITN | Application deemed withdrawn, e.g. because no request for examination was filed or no examination fee was paid |