JP7689268B2 - 特定方法、及び、送風システム - Google Patents
特定方法、及び、送風システム Download PDFInfo
- Publication number
- JP7689268B2 JP7689268B2 JP2022505037A JP2022505037A JP7689268B2 JP 7689268 B2 JP7689268 B2 JP 7689268B2 JP 2022505037 A JP2022505037 A JP 2022505037A JP 2022505037 A JP2022505037 A JP 2022505037A JP 7689268 B2 JP7689268 B2 JP 7689268B2
- Authority
- JP
- Japan
- Prior art keywords
- fan motor
- unit
- air volume
- control unit
- motor unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
























Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D27/00—Control, e.g. regulation, of pumps, pumping installations or pumping systems specially adapted for elastic fluids
- F04D27/001—Testing thereof; Determination or simulation of flow characteristics; Stall or surge detection, e.g. condition monitoring
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D25/00—Pumping installations or systems
- F04D25/02—Units comprising pumps and their driving means
- F04D25/06—Units comprising pumps and their driving means the pump being electrically driven
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D27/00—Control, e.g. regulation, of pumps, pumping installations or pumping systems specially adapted for elastic fluids
- F04D27/004—Control, e.g. regulation, of pumps, pumping installations or pumping systems specially adapted for elastic fluids by varying driving speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B51/00—Testing machines, pumps, or pumping installations
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02B—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO BUILDINGS, e.g. HOUSING, HOUSE APPLIANCES OR RELATED END-USER APPLICATIONS
- Y02B30/00—Energy efficient heating, ventilation or air conditioning [HVAC]
- Y02B30/70—Efficient control or regulation technologies, e.g. for control of refrigerant flow, motor or heating
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Control Of Electric Motors In General (AREA)
- Ventilation (AREA)
- Control Of Positive-Displacement Air Blowers (AREA)
Description
ハイブリッド自動車、電気自動車等の大容量の二次電池を搭載する自動車には、二次電池を冷却するための送風システムが搭載される。この送風システムは、二次電池を格納するバッテリパック内に送風するファンモータユニットと、ファンモータユニットを制御する制御部として機能するECU(Electronic Control Unit)とから構成される。
<構成>
図1は、実施の形態1に係る送風システム1の構成例を示すブロック図である。
以下、上記構成の送風システム1が行う動作について説明する。
送風システム1によると、制御部10は、ファンモータユニット20を通常動作させる制御を行う際に出力する第1の風量指令をファンモータユニットに出力することで、ファンモータユニット20の種類を特定することができる。
以下、実施の形態2に係る送風システムについて説明する。ここでは、実施の形態2に係る送風システムについて、実施の形態1に係る送風システム1の構成要素と同様の構成要素については、既に説明済みであるとして、同じ符号を振ってその詳細な説明を省略する。
前述したように、実施の形態2に係る送風システムは、対応テーブルが対象とする複数種類のファンモータユニットが、互いに、ファンの形状及びケースの形状が等しい一方で、互いに、モータの極数が異なる場合であっても、第1の風量指令Sと第1の速度通知FGとに基づいて、ファンモータユニット20の種類を特定し、特定した種類を示す種類特定信号を出力することができる。
以下、実施の形態3に係る送風システムについて説明する。ここでは、実施の形態3に係る送風システムについて、実施の形態1に係る送風システム1の構成要素と同様の構成要素については、既に説明済みであるとして同じ符号を振ってその詳細な説明を省略する。
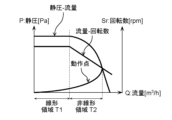
前述したように、実施の形態3に係る送風システムにおいて、対応関係保持部14Bは、ファンモータユニット20の動作点が線形領域T1に限定されていない場合についての対応テーブルを保持する。このため、実施の形態3に係る送風システムによると、ファンモータユニット20の動作点が線形領域T1に限定されていない場合であっても、第1の風量指令Sと第1の速度通知FGとに基づいて、ファンモータユニット20の種類を特定し、特定した種類を示す種類特定信号を出力することができる。
以下、実施の形態4に係る送風システムについて説明する。ここでは、実施の形態4に係る送風システムについて、実施の形態3に係る送風システムの構成要素と同様の構成要素については、既に説明済みであるとして同じ符号を振ってその詳細な説明を省略する。
前述したように、実施の形態4に係る送風システムによると、第1の風量指令Sと第1の速度通知FGとの対応関係が、対応テーブルが対象とする複数種類のファンモータユニットのいずれにも該当しない場合に、異常検知信号を出力する。これにより、ファンモータユニット20に係る異常が速やかに発見される。
以上のように、本出願において開示する技術の例示として、実施の形態1~実施の形態4について説明した。しかしながら、本開示による技術は、これら実施の形態に限定されるものではない。本開示の趣旨を逸脱しない限り、当業者が思いつく各種変形を本実施の形態に施したもの、又は、異なる実施の形態における構成要素を組み合わせて構築される形態も、本出願において開示する技術の範囲内に含まれてもよい。
10、10A、10B、10C 制御部
11 風量指令出力部
12 速度通知取得部
13、13C 特定部
14、14A、14B 対応関係保持部
15 特性保持部
20 ファンモータユニット
21 モータ
22 ファン
23 ケース
25 ホールセンサ
26 マイコン
28 駆動回路
30 バッテリパック
100 ECU
110 電気自動車
Claims (8)
- モータと前記モータの回転により回転するファンと前記ファンの少なくとも一部を覆うケースとを有し、外部に送風するファンモータユニットと、前記ファンモータユニットを制御する制御部と、を備え、
前記制御部は、前記ファンモータユニットが行う送風の風量を制御するための風量指令を前記ファンモータユニットに出力し、
前記ファンモータユニットは、前記モータの回転状態を示す速度通知を前記制御部に出力する送風システムにおける前記ファンモータユニットの種類を特定する特定方法であって、
前記制御部が、前記ファンモータユニットを通常動作させる制御を行う際に出力する第1の風量指令を前記ファンモータユニットに出力する第1のステップと、
前記制御部が、前記第1の風量指令の出力に応じて前記ファンモータユニットから出力される第1の速度通知を取得する第2のステップと、
前記制御部が、前記第1の風量指令と前記第1の速度通知とに基づいて、前記ファンモータユニットの種類を特定し、特定した種類を示す種類特定信号を出力する第3のステップと、を含み、
前記風量指令のデューティと前記速度通知との関係を示す対応テーブルを予め記憶し、
前記制御部は前記対応テーブルに基づいて前記種類特定信号を出力する、
特定方法。 - 前記制御部は、更に、複数種類のファンモータユニットのそれぞれについての、前記風量指令と前記速度通知との対応関係を示す対応関係情報を保持し、
前記第3のステップでは、前記制御部が、前記対応関係情報に基づいて、前記第1の風量指令と前記第1の速度通知との対応関係が、前記複数種類のファンモータユニットのうちの一の種類のファンモータユニットに該当する場合に、前記一の種類のファンモータユニットを特定するための前記種類特定信号を出力する、請求項1に記載の特定方法。 - 前記第3のステップは、更に、前記制御部が、前記対応関係情報に基づいて、前記第1の風量指令と前記第1の速度通知との対応関係が、前記複数種類のファンモータユニットのいずれにも該当しない場合に、前記ファンモータユニットに係る異常を検知した旨を示す
異常検知信号を出力する第4のステップを含む、請求項2に記載の特定方法。 - 前記モータは、PWM(Pulse Width Modulation)制御により回転が制御され、
前記風量指令は、前記モータの回転をPWM制御により制御するためのPWMデューティ信号であり、
前記速度通知は、前記モータの極数をn(nは2以上の整数)とする場合において、前記モータの回転周波数のn/2倍の周波数のパルス信号である、請求項1から請求項3のいずれか1項に記載の特定方法。 - 前記第1のステップでは、前記制御部が、前記PWMデューティ信号のデューティと前記パルス信号の前記周波数との関係が線形関係となる範囲における前記デューティからなる前記第1の風量指令を出力する、請求項4に記載の特定方法。
- モータと前記モータの回転により回転するファンと前記ファンの少なくとも一部を覆うケースとを有し、外部に送風するファンモータユニットと、前記ファンモータユニットを制御する制御部と、を備え、
前記制御部は、前記ファンモータユニットが行う送風の風量を制御するための風量指令を前記ファンモータユニットに出力し、
前記ファンモータユニットは、前記モータの回転状態を示す速度通知を前記制御部に出力し、
前記制御部は、前記ファンモータユニットを通常動作させる制御を行う際に出力する第1の風量指令を前記ファンモータユニットに出力した場合において、前記第1の風量指令に応じて前記ファンモータユニットから第1の速度通知が出力されたときに、前記第1の風量指令と、前記第1の速度通知とに基づいて、前記ファンモータユニットの種類を特定し、特定した種類を示す種類特定信号を出力し、
前記風量指令のデューティと前記速度通知との関係を示す対応テーブルを予め記憶し、
前記制御部は前記対応テーブルに基づいて前記種類特定信号を出力する、
送風システム。 - 前記制御部は、更に、複数種類のファンモータユニットのそれぞれについての、前記風量指令と前記速度通知との対応関係を示す対応関係情報を保持し、前記対応関係情報に基づいて、前記第1の風量指令と前記第1の速度通知との対応関係が、前記複数種類のファンモータユニットのうちの一の種類のファンモータユニットに該当する場合に、前記一の種類のファンモータユニットを特定するための前記種類特定信号を出力する、請求項6に記載の送風システム。
- 前記制御部は、更に、前記制御部が、前記対応関係情報に基づいて、前記第1の風量指令と前記第1の速度通知との対応関係が、前記複数種類のファンモータユニットのいずれにも該当しない場合に、前記ファンモータユニットに係る異常を検知した旨を示す異常検知信号を出力する、請求項7に記載の送風システム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020038246 | 2020-03-05 | ||
| JP2020038246 | 2020-03-05 | ||
| PCT/JP2021/003192 WO2021176905A1 (ja) | 2020-03-05 | 2021-01-29 | 特定方法、及び、送風システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2021176905A1 JPWO2021176905A1 (ja) | 2021-09-10 |
| JPWO2021176905A5 JPWO2021176905A5 (ja) | 2022-11-02 |
| JP7689268B2 true JP7689268B2 (ja) | 2025-06-06 |
Family
ID=77614161
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022505037A Active JP7689268B2 (ja) | 2020-03-05 | 2021-01-29 | 特定方法、及び、送風システム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US12173720B2 (ja) |
| JP (1) | JP7689268B2 (ja) |
| CN (1) | CN115210474B (ja) |
| WO (1) | WO2021176905A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN120720259B (zh) * | 2025-08-29 | 2025-11-07 | 苏州元脑智能科技有限公司 | 风扇的转速获取方法和风扇控制组件 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140028292A1 (en) | 2012-07-30 | 2014-01-30 | International Business Machines Corporation | Identification system and electronic system for identifying a fan type of a fan |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3562608B2 (ja) * | 1996-09-04 | 2004-09-08 | 株式会社島津製作所 | ターボ分子ポンプ |
| US8297068B2 (en) * | 2007-03-27 | 2012-10-30 | Panasonic Corporation | Motor control device, its control method, and motor device |
| JP2010242767A (ja) * | 2010-07-20 | 2010-10-28 | Fuji Industrial Co Ltd | 送風機の風量制御方法 |
| JP5625993B2 (ja) * | 2011-02-22 | 2014-11-19 | 株式会社デンソー | 車両用空調装置 |
| WO2013031597A1 (ja) * | 2011-08-31 | 2013-03-07 | 三洋電機株式会社 | 空気調和装置及び空気調和装置の制御方法 |
| US8788111B2 (en) * | 2011-08-31 | 2014-07-22 | Hewlett-Packard Development Company, L.P. | Identifying a fan connected to a computing device |
| JP6074607B2 (ja) | 2011-11-15 | 2017-02-08 | パナソニックIpマネジメント株式会社 | 遠心送風機 |
| CN104160616B (zh) * | 2012-03-02 | 2016-12-28 | 松下电器产业株式会社 | 电动机控制装置和电动机控制方法 |
| CN205372921U (zh) * | 2016-01-04 | 2016-07-06 | 武汉理工大学 | 一种自适应的变风量空调送风风机速度控制器 |
| US10866006B2 (en) * | 2018-06-25 | 2020-12-15 | Dell Products L.P. | Systems and methods for fan typing and anomaly detection |
| CN111911440B (zh) * | 2019-05-07 | 2023-10-13 | 联想企业解决方案(新加坡)有限公司 | 风扇类型识别装置和方法 |
-
2021
- 2021-01-29 US US17/905,139 patent/US12173720B2/en active Active
- 2021-01-29 JP JP2022505037A patent/JP7689268B2/ja active Active
- 2021-01-29 CN CN202180017955.6A patent/CN115210474B/zh active Active
- 2021-01-29 WO PCT/JP2021/003192 patent/WO2021176905A1/ja not_active Ceased
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140028292A1 (en) | 2012-07-30 | 2014-01-30 | International Business Machines Corporation | Identification system and electronic system for identifying a fan type of a fan |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2021176905A1 (ja) | 2021-09-10 |
| US12173720B2 (en) | 2024-12-24 |
| WO2021176905A1 (ja) | 2021-09-10 |
| CN115210474B (zh) | 2025-11-04 |
| US20230093213A1 (en) | 2023-03-23 |
| CN115210474A (zh) | 2022-10-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20230223874A1 (en) | Methods and systems for automatic rotation direction determination of electronically commutated motor | |
| CN102939708B (zh) | 电动机驱动装置、无刷电动机以及电动机驱动方法 | |
| US7676302B2 (en) | System and method of operating a cooling fan | |
| US20100114379A1 (en) | Fan control system | |
| US20040186629A1 (en) | Intelligent cooling fan | |
| CN104935237B (zh) | 电机控制装置 | |
| JP6274069B2 (ja) | モータ制御装置 | |
| US20100039055A1 (en) | Temperature control of motor | |
| CN103444071B (zh) | 电动机驱动方法、电动机驱动装置以及无刷电动机 | |
| CN101233325A (zh) | 送风装置及搭载该送风装置的电气设备 | |
| JP7689268B2 (ja) | 特定方法、及び、送風システム | |
| CN102444605A (zh) | 用于通风设备的抖动控制和操作型态 | |
| JP2017158369A (ja) | モータ駆動装置 | |
| JPWO2021176905A5 (ja) | ||
| JP6281115B2 (ja) | モータ駆動方法、モータ駆動装置およびブラシレスモータ | |
| JP2017131053A (ja) | モータ調整システム | |
| US11843342B2 (en) | Motor drive control device and motor drive control method | |
| JP2006291908A (ja) | エンジン冷却システムの電動ファン制御装置 | |
| CN102882464A (zh) | 电机驱动电路及电机装置 | |
| JP6790729B2 (ja) | 車載バッテリ冷却システム | |
| JP6702227B2 (ja) | 車両用冷却ファンモータ制御装置 | |
| JP2003143750A (ja) | モータ駆動システムの過負荷保護装置 | |
| CN111075738B (zh) | 一种基于无刷电机的风扇启动控制方法和控制装置 | |
| JP5196746B2 (ja) | バッテリ過熱保護装置におけるファン駆動制御方法及びバッテリ過熱保護装置 | |
| JP2004278438A (ja) | 送風機制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220622 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20221024 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231107 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240716 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240822 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20240918 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241203 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20250108 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250415 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250428 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7689268 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |