JP7680964B2 - 軌道を突き固めるための軌道工事機械および方法 - Google Patents
軌道を突き固めるための軌道工事機械および方法 Download PDFInfo
- Publication number
- JP7680964B2 JP7680964B2 JP2021569536A JP2021569536A JP7680964B2 JP 7680964 B2 JP7680964 B2 JP 7680964B2 JP 2021569536 A JP2021569536 A JP 2021569536A JP 2021569536 A JP2021569536 A JP 2021569536A JP 7680964 B2 JP7680964 B2 JP 7680964B2
- Authority
- JP
- Japan
- Prior art keywords
- track
- image
- compaction
- construction machine
- detected
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01B—PERMANENT WAY; PERMANENT-WAY TOOLS; MACHINES FOR MAKING RAILWAYS OF ALL KINDS
- E01B27/00—Placing, renewing, working, cleaning, or taking-up the ballast, with or without concurrent work on the track; Devices therefor; Packing sleepers
- E01B27/12—Packing sleepers, with or without concurrent work on the track; Compacting track-carrying ballast
- E01B27/13—Packing sleepers, with or without concurrent work on the track
- E01B27/16—Sleeper-tamping machines
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01B—PERMANENT WAY; PERMANENT-WAY TOOLS; MACHINES FOR MAKING RAILWAYS OF ALL KINDS
- E01B2203/00—Devices for working the railway-superstructure
- E01B2203/10—Track-lifting or-lining devices or methods
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01B—PERMANENT WAY; PERMANENT-WAY TOOLS; MACHINES FOR MAKING RAILWAYS OF ALL KINDS
- E01B2203/00—Devices for working the railway-superstructure
- E01B2203/12—Tamping devices
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01B—PERMANENT WAY; PERMANENT-WAY TOOLS; MACHINES FOR MAKING RAILWAYS OF ALL KINDS
- E01B2203/00—Devices for working the railway-superstructure
- E01B2203/16—Guiding or measuring means, e.g. for alignment, canting, stepwise propagation
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01B—PERMANENT WAY; PERMANENT-WAY TOOLS; MACHINES FOR MAKING RAILWAYS OF ALL KINDS
- E01B27/00—Placing, renewing, working, cleaning, or taking-up the ballast, with or without concurrent work on the track; Devices therefor; Packing sleepers
- E01B27/12—Packing sleepers, with or without concurrent work on the track; Compacting track-carrying ballast
- E01B27/13—Packing sleepers, with or without concurrent work on the track
- E01B27/16—Sleeper-tamping machines
- E01B27/17—Sleeper-tamping machines combined with means for lifting, levelling or slewing the track
Landscapes
- Engineering & Computer Science (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Machines For Laying And Maintaining Railways (AREA)
Description
Claims (14)
- バラスト道床(8)内に支持され、レール(7)が固定されたまくらぎ(6)を有する軌道(5)を突き固めるための軌道工事機械(1)であって、レール走行装置(2)にて走行可能な機械フレーム(3)と、前記バラスト道床(8)内に沈込み可能、振動可能かつ互いに接近可能な突固めツール(11)を有する突固めユニット(4)と、を備え、作業方向(13)で見て前記突固めユニット(4)よりも前方に、リアルタイム撮像を出力装置(16)に伝送するためのカメラ(30)が配置されている、軌道工事機械(1)において、
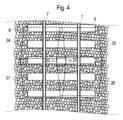
作業方向(13)で見て前記突固めユニット(4)よりも前方に、前記軌道(5)の第1の表面範囲(23)を第1の画像区分(24,25)として検出するための第1のカメラシステム(14)が配置されており、作業方向(13)で見て前記突固めユニット(4)よりも後方に、前記軌道(5)の第2の表面範囲(26)を第2の画像区分(27,28)として検出するための第2のカメラシステム(15)が配置されており、検出された複数の前記画像区分(24,25,27,28)は、互いに部分的に交わっており、前記出力装置(16)は、複数の前記画像区分(24,25,27,28)を1つの合成画像で出力するように構成されており、
前記軌道(5)の検出された前記表面範囲(23,26)内に、下方に向けられた光線によって、特に照明パターンの形態の光マーキング(33)を発生させるための照明装置(32)が配置されていることを特徴とする、軌道工事機械(1)。 - 前記突固めユニット(4)は、変位駆動装置によって前記カメラシステム(14,15)に対して変位可能に配置されており、前記出力装置(16)は、前記突固めユニット(4)の瞬時の位置を表示するように構成されていることを特徴とする、請求項1記載の軌道工事機械(1)。
- 前記カメラシステム(14,15)は、斜め下向きに方向設定されたカメラ軸線(31)を有しており、コンピュータユニットが、検出された前記画像区分(24,25,27,28)の歪みを除去するように構成されていることを特徴とする、請求項1または2記載の軌道工事機械(1)。
- 各々のカメラシステム(14,15)は、分割画像区分(24,25,27,28)を検出するための、機械横方向に相並んで配置された少なくとも2つのカメラ(30)を備え、相並んで配置された2つの前記カメラ(30)の前記分割画像区分(24,25,27,28)は、互いに交わっており、前記出力装置(16)は、全ての分割画像区分(24,25,27,28)を合成するように構成されていることを特徴とする、請求項1から3までのいずれか1項記載の軌道工事機械(1)。
- 前記カメラシステム(14,15)は、赤外光を検出するように構成されており、前記軌道(5)の検出すべき前記表面範囲(23,26)を照明するために、少なくとも1つの赤外光源が配置されていることを特徴とする、請求項1から4までのいずれか1項記載の軌道工事機械(1)。
- 作業方向(13)で見て前記第1のカメラシステム(14)よりも前方に、まくらぎ位置を検出するためのセンサ装置(20)が配置されており、特に、前記出力装置(16)は、検出された前記まくらぎ位置を前記合成画像内に表示するために、前記センサ装置(20)に接続されていることを特徴とする、請求項1から5までのいずれか1項記載の軌道工事機械(1)。
- 前記突固めツール(11)の高さ位置を検出するために、前記突固めユニット(4)の側方に並んで少なくとも1つのカメラ(30)が配置されていることを特徴とする、請求項1から6までのいずれか1項記載の軌道工事機械(1)。
- 請求項1から7までのいずれか1項記載の軌道工事機械(1)を運転するための方法において、
前記合成画像(29)を前記出力装置(16)によってオペレータに対してリアルタイムで表示し、前記突固めユニット(4)を、前記合成画像(29)を使用して前記軌道(5)に対して位置決めすることを特徴とする、方法。 - 前記突固めユニット(4)の瞬時の位置を検出し、これに基づき得られる前記突固めツール(11)の突込み箇所(36)を前記合成画像(29)内に表示することを特徴とする、請求項8記載の方法。
- 前記軌道(5)の検出された前記表面範囲(23,26)に照明装置(32)によって光マーキング(33)を発生させることを特徴とする、請求項8または9記載の方法。
- 前記照明装置(32)によって照明パターンを発生させ、該照明パターンのマッチングによって前記画像区分(24,25,27,28)を合成することを特徴とする、請求項10記載の方法。
- 前記カメラシステム(14,15)の検出された画像データから、前記軌道(5)の検出された前記表面範囲(23,26)の三次元画像を算出することを特徴とする、請求項8から11までのいずれか1項記載の方法。
- 前記軌道工事機械(1)の前進時にセンサ装置(20)によってまくらぎ位置を検出し、該まくらぎ位置を前記オペレータに対して前記合成画像(29)内に表示することを特徴とする、請求項8から12までのいずれか1項記載の方法。
- 突固め位置を支援システムによって予め設定し、提案された前記突固め位置を前記オペレータに対して前記合成画像(29)内に表示することを特徴とする、請求項8から13までのいずれか1項記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| ATA194/2019A AT522455B1 (de) | 2019-05-23 | 2019-05-23 | Gleisbaumaschine und Verfahren zum Stopfen eines Gleises |
| ATA194/2019 | 2019-05-23 | ||
| PCT/EP2020/061271 WO2020233934A1 (de) | 2019-05-23 | 2020-04-23 | Gleisbaumaschine und verfahren zum stopfen eines gleises |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022534699A JP2022534699A (ja) | 2022-08-03 |
| JP7680964B2 true JP7680964B2 (ja) | 2025-05-21 |
Family
ID=70456773
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021569536A Active JP7680964B2 (ja) | 2019-05-23 | 2020-04-23 | 軌道を突き固めるための軌道工事機械および方法 |
Country Status (11)
| Country | Link |
|---|---|
| US (1) | US12442140B2 (ja) |
| EP (1) | EP3973104B1 (ja) |
| JP (1) | JP7680964B2 (ja) |
| CN (1) | CN113853462B (ja) |
| AT (1) | AT522455B1 (ja) |
| AU (1) | AU2020280667B2 (ja) |
| BR (1) | BR112021023504A2 (ja) |
| CA (1) | CA3135554A1 (ja) |
| EA (1) | EA202100251A1 (ja) |
| WO (1) | WO2020233934A1 (ja) |
| ZA (1) | ZA202107773B (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022162253A (ja) * | 2021-04-12 | 2022-10-24 | Jimテクノロジー株式会社 | トンネル掘削機の画像処理システム、および、トンネル掘削機の画像処理方法 |
| AT525332B1 (de) | 2021-08-04 | 2025-10-15 | Hp3 Real Gmbh | Verfahren zur Berichtigung des Seitenabstandes und des Höhenabstandes einer Bahnsteigkante zur Gleisachse |
| CN116695501B (zh) * | 2023-08-07 | 2023-12-15 | 中国铁建高新装备股份有限公司 | 检测铁路道岔的方法、装置、及电子设备、存储介质 |
| AT528557A1 (de) | 2024-07-22 | 2026-02-15 | Hp3 Real Gmbh | Verfahren zur Fernsteuerung von mehreren gleichzeitig arbeitenden gleisfahrbaren Instandhaltungsmaschinen |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20020078853A1 (en) | 2000-12-22 | 2002-06-27 | Quentin Holmes | Range-finding based image processing rail way servicing apparatus and method |
| JP2004301619A (ja) | 2003-03-31 | 2004-10-28 | Railway Technical Res Inst | 画像読取装置 |
| US20060032063A1 (en) | 2004-08-16 | 2006-02-16 | Fabrication Technology Associates, Inc., Also Known As Fab Tech | Method and system for controlling railroad surfacing |
| CN101982609A (zh) | 2010-09-19 | 2011-03-02 | 北京凌云光视数字图像技术有限公司 | 捣固车光电测量系统及方法 |
| CN205105334U (zh) | 2015-11-09 | 2016-03-23 | 长沙慧联智能科技有限公司 | 捣固车本地与远程视频监控及语音数据系统 |
| JP2016208294A (ja) | 2015-04-23 | 2016-12-08 | 株式会社日立製作所 | マルチ画像撮影システム、撮影装置、および画像処理装置 |
| US20170029001A1 (en) | 2014-04-15 | 2017-02-02 | Eber Dynamics Ab | Method and apparatus to determine structural parameters of a railway track |
| US20170096783A1 (en) | 2015-10-05 | 2017-04-06 | Harsco Technologies LLC | Light reference system |
| WO2018206214A1 (de) | 2017-05-12 | 2018-11-15 | Plasser & Theurer Export Von Bahnbaumaschinen Gmbh | Verfahren zum steuern einer gleisbaumaschine |
| JP2018197058A (ja) | 2017-05-23 | 2018-12-13 | 株式会社交通建設 | 鉄道軌道の支障データ計測システム及びその支障物調査機 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AT321347B (de) | 1968-01-02 | 1975-03-25 | Plasser Bahnbaumasch Franz | Fahrbare Gleisstopfmaschine |
| AT359110B (de) * | 1977-08-16 | 1980-10-27 | Plasser Bahnbaumasch Franz | Selbstfahrbare gleisbaumaschinenanordnung |
| JPH0617562B2 (ja) | 1988-10-03 | 1994-03-09 | 西日本旅客鉄道株式会社 | マルタイの自動制御装置 |
| JP2525093B2 (ja) * | 1991-09-10 | 1996-08-14 | 東海旅客鉄道株式会社 | 保線車両用障害物位置検出方法 |
| JPH05328054A (ja) | 1992-05-19 | 1993-12-10 | Fuji Xerox Co Ltd | 画像読取装置 |
| JP3380587B2 (ja) * | 1993-05-13 | 2003-02-24 | 株式会社トキメック | 軌道構造識別装置 |
| JPH10197455A (ja) * | 1997-01-09 | 1998-07-31 | Ricoh Co Ltd | 表面欠陥検査装置 |
| CN2340801Y (zh) * | 1997-12-24 | 1999-09-29 | 铁道部株洲电力机车研究所 | 一种自动拨道、抄平、捣固车 |
| ES2232106T3 (es) * | 1998-11-11 | 2005-05-16 | Franz Plasser Bahnbaumaschinen- Industriegesellschaft M.B.H. | Procedimiento y maquina bateadora para batear la parte inferior de un via. |
| BRPI0512871A (pt) * | 2004-06-30 | 2008-04-08 | Georgetown Rail Equipment Comp | sistema e método para inspecionar via de estrada de ferro |
| CN201794010U (zh) * | 2010-09-19 | 2011-04-13 | 北京凌云光视数字图像技术有限公司 | 捣固车光电测量系统 |
| RU2468136C1 (ru) * | 2011-03-30 | 2012-11-27 | Максим Николаевич Балезин | Способ подбивки шпал железнодорожного пути и машина для его осуществления |
| AT13635U1 (de) * | 2013-01-10 | 2014-05-15 | Swietelsky Baugesellschaft M B H | Vorrichtung zum Unterstopfen des Schotterbettes einer Gleisanlage |
| WO2015009286A1 (en) | 2013-07-16 | 2015-01-22 | Fujitsu Limited | System and method for learning recommendation simulation |
| EP2960371B1 (de) | 2014-06-27 | 2017-08-09 | HP3 Real GmbH | Vorrichtung zum Vermessen von Gleisen |
| AT518839B1 (de) | 2016-07-11 | 2018-12-15 | Plasser & Theurer Exp Von Bahnbaumaschinen G M B H | System und Verfahren zum Vermessen eines Gleises |
| CN108195472B (zh) | 2018-01-08 | 2020-03-20 | 亿嘉和科技股份有限公司 | 一种基于轨道移动机器人的热传导全景成像方法 |
-
2019
- 2019-05-23 AT ATA194/2019A patent/AT522455B1/de active
-
2020
- 2020-04-23 BR BR112021023504A patent/BR112021023504A2/pt active Search and Examination
- 2020-04-23 JP JP2021569536A patent/JP7680964B2/ja active Active
- 2020-04-23 WO PCT/EP2020/061271 patent/WO2020233934A1/de not_active Ceased
- 2020-04-23 AU AU2020280667A patent/AU2020280667B2/en active Active
- 2020-04-23 CN CN202080037641.8A patent/CN113853462B/zh active Active
- 2020-04-23 EA EA202100251A patent/EA202100251A1/ru unknown
- 2020-04-23 US US17/605,091 patent/US12442140B2/en active Active
- 2020-04-23 EP EP20721205.1A patent/EP3973104B1/de active Active
- 2020-04-23 CA CA3135554A patent/CA3135554A1/en active Pending
-
2021
- 2021-10-13 ZA ZA2021/07773A patent/ZA202107773B/en unknown
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20020078853A1 (en) | 2000-12-22 | 2002-06-27 | Quentin Holmes | Range-finding based image processing rail way servicing apparatus and method |
| JP2004301619A (ja) | 2003-03-31 | 2004-10-28 | Railway Technical Res Inst | 画像読取装置 |
| US20060032063A1 (en) | 2004-08-16 | 2006-02-16 | Fabrication Technology Associates, Inc., Also Known As Fab Tech | Method and system for controlling railroad surfacing |
| CN101982609A (zh) | 2010-09-19 | 2011-03-02 | 北京凌云光视数字图像技术有限公司 | 捣固车光电测量系统及方法 |
| US20170029001A1 (en) | 2014-04-15 | 2017-02-02 | Eber Dynamics Ab | Method and apparatus to determine structural parameters of a railway track |
| JP2016208294A (ja) | 2015-04-23 | 2016-12-08 | 株式会社日立製作所 | マルチ画像撮影システム、撮影装置、および画像処理装置 |
| US20170096783A1 (en) | 2015-10-05 | 2017-04-06 | Harsco Technologies LLC | Light reference system |
| CN205105334U (zh) | 2015-11-09 | 2016-03-23 | 长沙慧联智能科技有限公司 | 捣固车本地与远程视频监控及语音数据系统 |
| WO2018206214A1 (de) | 2017-05-12 | 2018-11-15 | Plasser & Theurer Export Von Bahnbaumaschinen Gmbh | Verfahren zum steuern einer gleisbaumaschine |
| JP2018197058A (ja) | 2017-05-23 | 2018-12-13 | 株式会社交通建設 | 鉄道軌道の支障データ計測システム及びその支障物調査機 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3973104A1 (de) | 2022-03-30 |
| ZA202107773B (en) | 2023-11-29 |
| EP3973104C0 (de) | 2025-11-19 |
| AU2020280667A1 (en) | 2021-10-28 |
| AT522455A4 (de) | 2020-11-15 |
| AT522455B1 (de) | 2020-11-15 |
| CN113853462B (zh) | 2024-07-12 |
| WO2020233934A1 (de) | 2020-11-26 |
| US12442140B2 (en) | 2025-10-14 |
| EA202100251A1 (ru) | 2022-03-14 |
| CN113853462A (zh) | 2021-12-28 |
| CA3135554A1 (en) | 2020-11-26 |
| BR112021023504A2 (pt) | 2022-01-18 |
| EP3973104B1 (de) | 2025-11-19 |
| US20220186444A1 (en) | 2022-06-16 |
| AU2020280667B2 (en) | 2025-05-22 |
| JP2022534699A (ja) | 2022-08-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7680964B2 (ja) | 軌道を突き固めるための軌道工事機械および方法 | |
| AU625749B2 (en) | Reference system for railway track machines | |
| JP6754594B2 (ja) | モータグレーダ | |
| CN206029901U (zh) | 列车检修机器人 | |
| CN101109957A (zh) | 大型工程车辆自动驾驶控制方法及系统 | |
| JPH05202506A (ja) | 測定車両 | |
| GB2093308A (en) | On-track equipment for lateral track position measurement | |
| JP5763974B2 (ja) | ふく進測定装置、ふく進測定システム及びふく進測定方法 | |
| JP2004132881A (ja) | 配列構造物の検査方法 | |
| CN209327230U (zh) | 一种铁路接触网支撑机构缺陷检测成像装置 | |
| JPH11321650A (ja) | 地上子取付位置測定装置と測定方法 | |
| CN109459440A (zh) | 一种铁路接触网支撑机构缺陷检测成像系统 | |
| CN206952357U (zh) | 焊缝跟踪传感器 | |
| CN215561586U (zh) | 一种钢轨焊缝识别系统和正火设备 | |
| JP4893063B2 (ja) | 地上子位置ずれ計測方法、装置、およびプログラム | |
| JPH08276269A (ja) | 倣い溶接方法 | |
| JPH08281435A (ja) | 倣い溶接方法及び装置 | |
| CN113250020A (zh) | 一种钢轨焊缝识别系统和正火设备 | |
| JP3464902B2 (ja) | 開先倣い装置 | |
| EA041696B1 (ru) | Путевая машина и способ подбивки рельсового пути | |
| KR102721112B1 (ko) | 영상기반 터널 스캐닝 시스템을 이용하여 획득된 다중 촬영 영상의 평면 전개 이미지 생성방법 | |
| JP2024520563A (ja) | 軌道を光学的に捕捉するためのアッセンブリおよび方法 | |
| JP2535268B2 (ja) | 軌道中心間距離測定方法およびその装置 | |
| JPH0510721A (ja) | ターゲツトの距離補正方法及びターゲツト並びに距離補正装置及び前記距離補正装置を用いた掘進装置 | |
| JP2002035933A (ja) | 溶接位置自動倣い制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230421 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240216 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240326 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241002 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241211 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250410 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250509 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7680964 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |