JP7620122B2 - 作業ロボット及び部品実装システム - Google Patents
作業ロボット及び部品実装システム Download PDFInfo
- Publication number
- JP7620122B2 JP7620122B2 JP2023564346A JP2023564346A JP7620122B2 JP 7620122 B2 JP7620122 B2 JP 7620122B2 JP 2023564346 A JP2023564346 A JP 2023564346A JP 2023564346 A JP2023564346 A JP 2023564346A JP 7620122 B2 JP7620122 B2 JP 7620122B2
- Authority
- JP
- Japan
- Prior art keywords
- work
- guided vehicle
- unit
- automated guided
- working
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Classifications
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K13/00—Apparatus or processes specially adapted for manufacturing or adjusting assemblages of electric components
- H05K13/02—Feeding of components
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/656—Interaction with payloads or external entities
- G05D1/667—Delivering or retrieving payloads
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K13/00—Apparatus or processes specially adapted for manufacturing or adjusting assemblages of electric components
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60D—VEHICLE CONNECTIONS
- B60D1/00—Traction couplings; Hitches; Draw-gear; Towing devices
- B60D2001/001—Traction couplings; Hitches; Draw-gear; Towing devices specially adapted for use on vehicles other than cars
- B60D2001/005—Traction couplings; Hitches; Draw-gear; Towing devices specially adapted for use on vehicles other than cars for carts, scooters, or the like
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2105/00—Specific applications of the controlled vehicles
- G05D2105/45—Specific applications of the controlled vehicles for manufacturing, maintenance or repairing
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2107/00—Specific environments of the controlled vehicles
- G05D2107/70—Industrial sites, e.g. warehouses or factories
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2109/00—Types of controlled vehicles
- G05D2109/10—Land vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Manufacturing & Machinery (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Automatic Assembly (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
図1は、本発明に係る部品実装システム100を示すブロック図である。部品実装システム100は、プリント配線基板等の基板P上に電子部品(以下、「部品」と称する)が搭載された部品実装基板を生産するシステムである。部品実装システム100は、第1生産ライン101、第2生産ライン102、補給部6、回収部7、充電ステーション8、管理装置9及び作業ロボット20を備える。
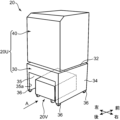
図2は、部品実装システム100に備えられる部品実装装置3の平面図であり、図3は、部品実装装置3及び作業ロボット20の側面図である。図2及び図3では、部品実装装置3及び作業ロボット20は模式的に図示されている。部品実装システム100に備えられる複数の部品実装装置3各々の基本的な構成は同じである。
作業ロボット20は、既述の通り、補給用の部品や交換用の機器を補給部6からから部品実装装置3に搬送して当該部品実装装置3に受け渡すとともに、使用済みの機器等を部品実装装置3から回収して回収部7に搬送する作業を行う。以下の説明では、部品実装装置3(生産用装置)に対して部品の補給作業を行う作業ロボット20について説明する。
図8は、部品実装システム100の制御系を示すブロック図であり、主に、管理装置9と作業ロボット20の無人搬送車20Vの制御系を示している。
次に、管理装置9(管理制御部300)の制御に基づく無人搬送車20Vの動作の一例について、図9~図14を参照しながら説明する。同図では、便宜上、一方の生産ライン(第1生産ライン101)のみ示している。
この部品実装システム100で使用される作業ロボット20は、既述の通り、作業ユニット20Uと無人搬送車20Vとが連結状態と連結解除状態とに切替可能とされ、連結解除状態において、無人搬送車20Vは作業ユニット20Uから離脱して単独で走行することが許容される。また、作業ユニット20Uは、無人搬送車20Vが離脱した状態においても、フィーダ交換作業を継続可能に構成されている。そして、この部品実装システム100では、図9~図14を用いて説明したように、作業ロボット20(第2作業ロボット20A)によるフィーダ入替作業中に、必要に応じて、当該作業ロボット20の無人搬送車20V(第2無人搬送車20Vb)が他の作業ロボット20(第1作業ロボット20A)の作業ユニット20U(第1作業ユニット20Ua)の移動に使用される。そのため、作業ロボット20によるフィーダ入替作業中に無人搬送車20Vが遊んでしまうことが抑制され、無人搬送車20Vが有効に活用される。
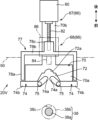
次に、作業ロボット20の第2実施形態について説明する。第2実施形態の作業ロボット20は、無人搬送車20Vと作業ユニット20Uとの連結構造が主に相違する。図15は、第2実施形態に係る作業ロボット20の要部側面図であり、連結前の作業ユニット20Uと無人搬送車20Vとを示している。
以上説明した作業ロボット20及び部品実装システム100は、本発明に係る作業ロボット及び部品実装システムの好ましい実施形態の例示であって、それらの具体的な構成は、本発明の要旨を逸脱しない範囲で適宜変更可能である。例えば、以下の(1)~(3)のような構成も、本発明の範囲に属する。
Claims (10)
- 部品実装基板を生産するための生産用装置に対して所定作業を行う作業ユニットと、当該作業ユニットを搬送する無人搬送車と、を備えた作業ロボットであって、
前記無人搬送車と共に前記作業ユニットを移動させることが可能な連結状態と、前記作業ユニットから離れて前記無人搬送車が単独で走行することを許容する連結解除状態との切替えが可能な連結機構を備え、
前記作業ユニットは、前記生産用装置に対する前記所定作業の実行中に当該作業ユニットから前記無人搬送車が離れた状態でも、前記所定作業を継続可能に構成され、
前記生産用装置は、複数のフィーダが配置された部品供給エリアを備え、前記フィーダが供給する部品を基板に実装する部品実装装置であり、
前記作業ユニットは、前記所定作業として、前記部品供給エリアに対して、前記フィーダの供給作業及び/又は回収作業を一フィーダ毎に行う、ことを特徴とする作業ロボット。 - 請求項1に記載の作業ロボットにおいて、
前記作業ユニットは、前記無人搬送車が走行する床面上に自立した状態で当該床面に沿って移動可能に構成されている、ことを特徴とする作業ロボット。 - 請求項2に記載の作業ロボットにおいて、
前記作業ユニットは、前記所定作業を実行する作業実行部と、この作業実行部の真下に配置され、前記作業実行部を前記床面に沿って移動可能に支持するユニットベース部とを備え、
前記ユニットベース部は、前記無人搬送車が自走により出入り可能な空洞状の搬送車収容部を備え、
前記連結機構は、前記搬送車収容部に収容された前記無人搬送車とユニットベース部とを連結するように構成されている、ことを特徴とする作業ロボット。 - 請求項3に記載の作業ロボットにおいて、
前記連結機構は、前記連結状態において、前記ユニットベース部に対して前記無人搬送車が前記床面に沿った方向に回転することを規制する回り止め機構を含む、ことを特徴とする作業ロボット。 - 請求項1乃至4の何れか一項に記載の作業ロボットにおいて、
前記生産用装置は、外部に電源供給が可能な給電コネクタを備えており、
前記作業ユニットは、前記生産用装置に対して前記所定作業を実行する所定の作業位置に配置された状態で、前記給電コネクタに嵌合可能な受電コネクタを備えている、ことを特徴とする作業ロボット。 - 部品実装基板を生産するための生産用装置と、
前記生産用装置に対して第1所定作業を行う第1作業ユニットを備えた請求項1乃至5の何れか一項に記載の作業ロボットと、
前記生産用装置に対して第2所定作業を行う作業ユニットであって、前記作業ロボットの前記無人搬送車と共に請求項1乃至5の何れか一項の作業ロボットを構成可能な第2作業ユニットと、
前記無人搬送車を制御する制御装置と、を備え、
前記制御装置は、前記無人搬送車を走行させて前記作業ロボットを前記生産用装置の位置まで移動させた後、前記第1作業ユニットによる前記第1所定作業の実行中に、前記無人搬送車と前記第1作業ユニットとの連結状態を解除し、当該無人搬送車を前記第2作業ユニットに連結させて当該第2作業ユニットを移動させる制御を実行する、ことを特徴とする部品実装システム。 - 請求項6に記載の部品実装システムにおいて、
前記生産用装置又は前記第1作業ユニットには、前記生産用装置に対して前記第1所定作業を実行する所定の作業位置に前記第1作業ユニットが配置された状態で、当該第1作業ユニットと前記生産用装置とを固定するクランプ機構が備えられている、ことを特徴とする部品実装システム。 - 部品実装基板を生産するための複数の生産用装置と、
前記生産用装置に対して所定作業を行う作業ユニットを備えた請求項1乃至5の何れか一項に記載の作業ロボットと、
前記作業ロボットの前記無人搬送車の充電設備である充電ステーションと、
前記無人搬送車を制御する制御装置と、を備え、
前記制御装置は、前記無人搬送車を走行させて前記作業ロボットを前記生産用装置の位置まで移動させた後、前記作業ユニットによる前記所定作業の実行中に、前記無人搬送車と前記作業ユニットとの連結状態を解除し、当該無人搬送車を充電ステーションに移動させて当該無人搬送車に充電を行わせる制御を実行する、ことを特徴とする部品実装システム。 - 請求項8に記載の部品実装システムにおいて、
前記無人搬送車は、バッテリの残量データを前記制御装置に送信するバッテリ管理部を備え、
前記制御装置は、前記残量データに基づき、バッテリ残量が所定レベル以下となっている場合に、前記無人搬送車に充電を行わせる制御を実行する、ことを特徴とする部品実装システム。 - 請求項8又は9に記載の部品実装システムにおいて、
前記所定作業を第1所定作業、前記作業ユニットを第1作業ユニット、前記無人搬送車を第1無人搬送車と定義したとき、
前記生産用装置に対して第2所定作業を行う第2作業ユニット及び第2無人搬送車を備えた請求項1乃至5の何れか一項に記載の第2作業ロボットをさらに含み、
前記制御装置は、前記第1無人搬送車に充電を行わせる制御の実行中に、前記第2所定作業を行っている前記第2作業ユニットと前記第2無人搬送車との連結状態を解除し、当該第2無人搬送車を前記第1作業ユニットに連結させて当該第1作業ユニットを移動させる制御を実行する、ことを特徴とする部品実装システム。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/044147 WO2023100298A1 (ja) | 2021-12-01 | 2021-12-01 | 作業ロボット及び部品実装システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2023100298A1 JPWO2023100298A1 (ja) | 2023-06-08 |
| JPWO2023100298A5 JPWO2023100298A5 (ja) | 2024-08-22 |
| JP7620122B2 true JP7620122B2 (ja) | 2025-01-22 |
Family
ID=86611798
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023564346A Active JP7620122B2 (ja) | 2021-12-01 | 2021-12-01 | 作業ロボット及び部品実装システム |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP7620122B2 (ja) |
| CN (1) | CN118318512A (ja) |
| DE (1) | DE112021008309T5 (ja) |
| WO (1) | WO2023100298A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2025109650A1 (ja) * | 2023-11-20 | 2025-05-30 | ヤマハ発動機株式会社 | 作業装置、作業対象装置、作業システムおよび作業対象装置に対する作業部の位置調整方法 |
| WO2025109651A1 (ja) * | 2023-11-20 | 2025-05-30 | ヤマハ発動機株式会社 | 作業装置、作業対象装置、作業システムおよび作業対象装置に対する作業部の位置調整方法 |
| WO2025253971A1 (ja) * | 2024-06-07 | 2025-12-11 | パナソニックIpマネジメント株式会社 | 搬送システム、搬送装置、アタッチメント、被把持部、把持部、部品実装システム、及び制御方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010212409A (ja) | 2009-03-10 | 2010-09-24 | Panasonic Corp | 部品実装方法 |
| JP2015015368A (ja) | 2013-07-05 | 2015-01-22 | Juki株式会社 | 部品交換台車、電子部品実装装置及び電子部品供給装置 |
| JP2020047801A (ja) | 2018-09-20 | 2020-03-26 | パナソニックIpマネジメント株式会社 | フィーダ台車 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2792956B2 (ja) * | 1989-11-10 | 1998-09-03 | 三洋電機株式会社 | 部品供給システム |
| JPH05265551A (ja) * | 1992-03-23 | 1993-10-15 | Suzuki Motor Corp | 搬送装置 |
| JP6074425B2 (ja) | 2012-07-13 | 2017-02-01 | 富士機械製造株式会社 | 部品実装システム |
-
2021
- 2021-12-01 CN CN202180103761.8A patent/CN118318512A/zh active Pending
- 2021-12-01 JP JP2023564346A patent/JP7620122B2/ja active Active
- 2021-12-01 DE DE112021008309.0T patent/DE112021008309T5/de active Pending
- 2021-12-01 WO PCT/JP2021/044147 patent/WO2023100298A1/ja not_active Ceased
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010212409A (ja) | 2009-03-10 | 2010-09-24 | Panasonic Corp | 部品実装方法 |
| JP2015015368A (ja) | 2013-07-05 | 2015-01-22 | Juki株式会社 | 部品交換台車、電子部品実装装置及び電子部品供給装置 |
| JP2020047801A (ja) | 2018-09-20 | 2020-03-26 | パナソニックIpマネジメント株式会社 | フィーダ台車 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE112021008309T5 (de) | 2024-08-14 |
| CN118318512A (zh) | 2024-07-09 |
| JPWO2023100298A1 (ja) | 2023-06-08 |
| WO2023100298A1 (ja) | 2023-06-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7620122B2 (ja) | 作業ロボット及び部品実装システム | |
| US6266873B1 (en) | Method and apparatus for mounting electronic components | |
| US11765876B2 (en) | Exchange device | |
| JP7531157B2 (ja) | 物品搬送システム | |
| JP7518979B2 (ja) | 搬送ロボットおよび部品実装システム | |
| KR102820827B1 (ko) | 전달 시스템 | |
| JP7422223B2 (ja) | 基板製造システム、自律走行台車および基板製造方法 | |
| JP7656079B2 (ja) | 搬送ロボット及び部品実装システム | |
| JP7531156B2 (ja) | 物品搬送装置 | |
| WO2024095326A1 (ja) | 移載装置 | |
| JP7519607B2 (ja) | 物品搬送システム | |
| WO2022224432A1 (ja) | 実装システム | |
| JP6974609B2 (ja) | 交換装置 | |
| JP7394308B2 (ja) | 部品装着装置 | |
| EP4369880A1 (en) | Battery feeder | |
| JP7229405B2 (ja) | 部品装着システム | |
| JP7715742B2 (ja) | 実装システム | |
| JP7372490B2 (ja) | 部品装着システム | |
| JP2021077792A (ja) | 部品装着機 | |
| CN120035115A (zh) | 供料器的更换 | |
| WO2022145317A1 (ja) | 物品搬送装置 | |
| JP2022118203A (ja) | 部品種類管理装置 | |
| WO2025238851A1 (ja) | 部品実装システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A529 | Written submission of copy of amendment under article 34 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A5211 Effective date: 20240501 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240501 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240805 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241119 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241219 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250107 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250109 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7620122 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |