JP7577896B2 - 建設機械 - Google Patents
建設機械 Download PDFInfo
- Publication number
- JP7577896B2 JP7577896B2 JP2024512452A JP2024512452A JP7577896B2 JP 7577896 B2 JP7577896 B2 JP 7577896B2 JP 2024512452 A JP2024512452 A JP 2024512452A JP 2024512452 A JP2024512452 A JP 2024512452A JP 7577896 B2 JP7577896 B2 JP 7577896B2
- Authority
- JP
- Japan
- Prior art keywords
- operating lever
- controller
- lever device
- hydraulic actuator
- hydraulic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2203—Arrangements for controlling the attitude of actuators, e.g. speed, floating function
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2004—Control mechanisms, e.g. control levers
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2025—Particular purposes of control systems not otherwise provided for
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2025—Particular purposes of control systems not otherwise provided for
- E02F9/2033—Limiting the movement of frames or implements, e.g. to avoid collision between implements and the cabin
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2058—Electric or electro-mechanical or mechanical control devices of vehicle sub-units
- E02F9/2062—Control of propulsion units
- E02F9/2066—Control of propulsion units of the type combustion engines
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2221—Control of flow rate; Load sensing arrangements
- E02F9/2232—Control of flow rate; Load sensing arrangements using one or more variable displacement pumps
- E02F9/2235—Control of flow rate; Load sensing arrangements using one or more variable displacement pumps including an electronic controller
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2264—Arrangements or adaptations of elements for hydraulic drives
- E02F9/2271—Actuators and supports therefor and protection therefor
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2296—Systems with a variable displacement pump
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/24—Safety devices, e.g. for preventing overload
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B15/00—Fluid-actuated devices for displacing a member from one position to another; Gearing associated therewith
- F15B15/20—Other details, e.g. assembly with regulating devices
- F15B15/204—Control means for piston speed or actuating force without external control, e.g. control valve inside the piston
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B20/00—Safety arrangements for fluid actuator systems; Applications of safety devices in fluid actuator systems; Emergency measures for fluid actuator systems
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B21/00—Common features of fluid actuator systems; Fluid-pressure actuator systems or details thereof, not covered by any other group of this subclass
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/40—Special vehicles
- B60Y2200/41—Construction vehicles, e.g. graders, excavators
- B60Y2200/412—Excavators
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2285—Pilot-operated systems
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2292—Systems with two or more pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/63—Electronic controllers
- F15B2211/6303—Electronic controllers using input signals
- F15B2211/6346—Electronic controllers using input signals representing a state of input means, e.g. joystick position
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/71—Multiple output members, e.g. multiple hydraulic motors or cylinders
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/75—Control of speed of the output member
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/80—Other types of control related to particular problems or conditions
- F15B2211/85—Control during special operating conditions
- F15B2211/851—Control during special operating conditions during starting
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/80—Other types of control related to particular problems or conditions
- F15B2211/86—Control during or prevention of abnormal conditions
- F15B2211/8643—Control during or prevention of abnormal conditions the abnormal condition being a human failure
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Fluid Mechanics (AREA)
- Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Operation Control Of Excavators (AREA)
- Component Parts Of Construction Machinery (AREA)
- Fluid-Pressure Circuits (AREA)
Description
本発明は、油圧ショベル等の建設機械に関する。
油圧ショベル等の建設機械では、複数の操作レバー装置でそれぞれ対応するアクチュエータが操作される。操作レバー装置とアクチュエータとの対応関係(以下、操作割当)は、建設機械の製造メーカにより異なる。そのため、例えば乗り慣れた建設機械とは製造メーカが異なる建設機械を使用する際、操作割当が異なることをオペレータが把握していない場合に誤操作する可能性がある。
それに対し、操作割当の変更機能を持つ建設機械において、選択されている操作割当をモニタに表示し、表示された操作割当を確認した旨の応答操作をオペレータがすることを条件として、運転開始を許容するものが知られている(特許文献1)。
しかし、特許文献1の技術を適用しても、オペレータが操作割当を確認せずに応答操作をしてしまえば、オペレータが操作割当を把握しないまま建設機械が運転可能な状態になってしまい、十分に誤操作を抑制できるとは限らない。
本発明の目的は、操作割当の誤認による誤操作を抑制することができる建設機械を提供することにある。
上記目的を達成するために、本発明は、複数の油圧アクチュエータと、前記複数の油圧アクチュエータを駆動する圧油を吐出する油圧ポンプと、前記油圧ポンプを駆動するエンジンと、対応する油圧アクチュエータを操作する複数の操作レバー装置と、前記エンジンを始動するキースイッチと、前記エンジンの回転数を検出する回転数センサと、対応する操作レバー装置の操作を検出する複数の操作センサと、前記操作レバー装置の操作に応じて対応する油圧アクチュエータを駆動するコントローラとを備えた建設機械において、前記コントローラは、前記キースイッチ、前記回転数センサ及び前記複数の操作センサからの信号に基づき、前記操作レバー装置の操作が前記エンジンの始動後の初回操作であるかを判定し、前記操作レバー装置の操作が前記エンジンの始動後の初回操作である場合、前記油圧アクチュエータの動作速度を制限する建設機械を提供する。
本発明によれば、操作割当の誤認による誤操作を抑制することができる。
以下に図面を用いて本発明の実施の形態を説明する。
<第1実施形態>
-油圧ショベル-
図1は本発明の第1実施形態に係る建設機械の一例である油圧ショベルの側面図である。図1において、図中の左右を油圧ショベル(正確には旋回体)の前後とする。同図に示した油圧ショベルは、走行体10、旋回体20、フロント作業機30等を含んで構成されている。
-油圧ショベル-
図1は本発明の第1実施形態に係る建設機械の一例である油圧ショベルの側面図である。図1において、図中の左右を油圧ショベル(正確には旋回体)の前後とする。同図に示した油圧ショベルは、走行体10、旋回体20、フロント作業機30等を含んで構成されている。
走行体10は、左右一対のクローラ11(片側のみ図示)、クローラフレーム12等を含んで構成される。左右のクローラ11は、それぞれ走行駆動装置13を備えており、互いに独立して動作可能である。走行駆動装置は、走行用油圧モータと減速機構等で構成される。
旋回体20は、走行体10の上部に旋回可能に搭載されており、旋回フレーム21、旋回機構22、旋回モータ23、キャブ24、エンジン25等を含んで構成されている。旋回フレーム21は、クローラフレーム12の上部に鉛直軸周りに旋回可能に連結されている。旋回機構22が、旋回モータ23の駆動力により走行体10に対して旋回体20(旋回フレーム21)を旋回駆動させる。キャブ24は、オペレータが搭乗して油圧ショベルを操作する運転室である。エンジン25は、油圧ショベルの原動機である。キャブ24及びエンジン25は、旋回フレーム21の上部に搭載されている。エンジン25には、エンジン回転数を検出する回転数センサ47(図3)が備わっている。
また、フロント作業機30は、旋回体20に連結されており、ブーム31、ブームシリンダ32、アーム33、アームシリンダ34、バケット35、バケットシリンダ36等で構成されている。ブーム31は、中心線を左右に延ばした軸により旋回フレーム21に対して上下に回動自在に連結されている。ブームシリンダ32は、旋回フレーム21とブーム31に両端が連結されており、伸縮することによってブーム31を上下に駆動する。アーム33は、中心線を左右に延ばした軸によりブーム31の先端に前後に回動自在に連結されている。アームシリンダ34は、ブーム31とアーム33に両端が連結されており、伸縮することによってアーム33を前後に駆動する。バケット35は、中心線を左右に延ばした軸によりアーム33の先端に回動自在に連結されている。バケットシリンダ36は、アーム33とバケット35とに両端が適宜連結されており、伸縮することによってバケット35を駆動する。バケット35は、アタッチメントであり、ブレーカやグラップル等の他のアタッチメントに交換することができる。
更に、旋回体20(旋回フレーム21)には、油圧ポンプ40や流量制御弁42(図2)等で構成される油圧システムが搭載されている。油圧ポンプ40は油圧源であり、複数の油圧アクチュエータ、例えば走行用油圧モータ、旋回モータ23、ブームシリンダ32、アームシリンダ34、バケットシリンダ36等を駆動するための油圧を吐出する。この油圧ポンプ40は、エンジン25により駆動される。流量制御弁42は、各油圧アクチュエータに供給する圧油の流れ(方向及び流量)を制御する複数の方向切換弁からなるバルブユニットである。流量制御弁42を構成する複数の方向切換弁は、受圧室に作用するパイロット圧で駆動される油圧駆動式であり、例えば3位置切換弁を採用する場合、駆動対象の油圧アクチュエータに各1つ対応して設けられる。
また、キャブ24の内部には、左右の操作レバー装置26,27(図2)が配置されている。操作レバー装置26,27は十字操作式であり、それぞれ前後にレバーを倒して操作する第1の操作レバー装置と、左右にレバーを倒して操作する第2の操作レバー装置とを含み、第1の操作レバー装置と第2の操作レバー装置とで操作レバーを共用する構成である。これら操作レバー装置26,27は、キャブ24の内部において、運転席の左右に配置されている。これら操作レバー装置26,27により、各油圧アクチュエータ(旋回モータ23、ブームシリンダ32、アームシリンダ34、バケットシリンダ36)が操作される。
その他、キャブ24の内部には、油圧ショベルの電源を入り切りしたりエンジン25を始動したりするためのキースイッチ29(図3)や、ゲートロックレバー(不図示)、モニタ70(図3)が配置されている。ゲートロックレバーは、操作レバー装置26,27による油圧アクチュエータの操作を無効化するロックレバー装置を操作するレバーである。このゲートロックレバーは、運転席の乗降側に設置されていて、寝かせた状態でオペレータの降車を妨げ、起こして運転席の乗降口を開放することでオペレータが降車できるように構成されている。
-油圧システム-
図2は本発明の第1実施形態に係る建設機械に備えられた油圧システムの要部を表す回路図である。
図2は本発明の第1実施形態に係る建設機械に備えられた油圧システムの要部を表す回路図である。
図2に示すように、操作レバー装置26,27は電気式である。これら操作レバー装置26,27の操作(操作方向、操作量)は、複数の操作センサ28a-28dで検出され、それぞれコントローラ60に出力される。操作センサ28a-28dには、ロータリエンコーダやポテンショメータ等といった操作レバーの傾斜方向及び傾斜量を検出するセンサを採用することができる。例えば操作センサ28aは、操作レバー装置26の前後方向の操作を、操作センサ28bは、操作レバー装置26の左右方向の操作を検出する。操作センサ28cは、操作レバー装置27の前後方向の操作を、操作センサ28dは、操作レバー装置27の左右方向の操作を検出する。
コントローラ60は、操作センサ28a-28dからの信号に基づき、オペレータのレバー操作に応じて、電磁比例弁(減圧弁)43a-43hのソレノイドに指令信号を出力する。電磁比例弁43a-43hは、パイロットポンプ41と流量制御弁42の各方向切換弁の受圧室とを繋ぐパイロットライン44(各受圧室に接続する支流部分)に設けられている。各電磁比例弁43a-43hは、パイロットポンプ41から吐出される圧油を減圧してパイロット圧を生成し、生成したパイロット圧を対応する方向切換弁の受圧室に作用させ、操作に応じた方向にその方向切換弁を駆動する。
例えば、電磁比例弁43a,43bは、旋回モータ23用の方向切換弁の対応する受圧室に繋がっている。電磁比例弁43aからパイロット圧が出力されると旋回モータ23用の方向切換弁のスプールが一方側に移動し、油圧ポンプ40からの圧油が旋回モータ23の一方側のポートに供給され、旋回モータ23が正転して右旋回動作する。電磁比例弁43bからパイロット圧が出力されると旋回モータ23用の方向切換弁のスプールが他方側に移動し、油圧ポンプ40からの圧油が旋回モータ23の他方側のポートに供給され、旋回モータ23が逆転して左旋回動作する。
電磁比例弁43c,43dは、アームシリンダ34用の方向切換弁の対応する受圧室に繋がっている。電磁比例弁43cからパイロット圧が出力されるとアームシリンダ34用の方向切換弁のスプールが一方側に移動し、油圧ポンプ40からの圧油がアームシリンダ34の一方側のポートに供給され、アームシリンダ34が収縮してアームダンプ動作する。電磁比例弁43dからパイロット圧が出力されるとアームシリンダ34用の方向切換弁のスプールが他方側に移動し、油圧ポンプ40からの圧油がアームシリンダ34の他方側のポートに供給され、アームシリンダ34が伸長してアームクラウド動作する。
電磁比例弁43e,43fは、ブームシリンダ32用の方向切換弁の対応する受圧室に繋がっている。電磁比例弁43eからパイロット圧が出力されるとブームシリンダ32用の方向切換弁のスプールが一方側に移動し、油圧ポンプ40からの圧油がブームシリンダ32の一方側のポートに供給され、ブームシリンダ32が収縮してブーム下げ動作する。電磁比例弁43fからパイロット圧が出力されるとブームシリンダ32用の方向切換弁のスプールが他方側に移動し、油圧ポンプ40からの圧油がブームシリンダ32の他方側のポートに供給され、ブームシリンダ32が伸長してブーム上げ動作する。
電磁比例弁43g,43hは、バケットシリンダ36用の方向切換弁の対応する受圧室に繋がっている。電磁比例弁43gからパイロット圧が出力されるとバケットシリンダ36用の方向切換弁のスプールが一方側に移動し、油圧ポンプ40からの圧油がバケットシリンダ36の一方側のポートに供給され、バケットシリンダ36が伸長してバケットクラウド動作する。電磁比例弁43hからパイロット圧が出力されるとバケットシリンダ36用の方向切換弁のスプールが他方側に移動し、油圧ポンプ40からの圧油がバケットシリンダ36の他方側のポートに供給され、バケットシリンダ36が収縮してバケットダンプ動作する。
また、パイロットライン44には、電磁比例弁43a-43hとパイロットポンプ41との間にロック弁46が設けられている。本実施形態では、ロック弁46に電磁駆動式の開閉弁を採用した構成を例示している。ロック弁46は、ゲートロックレバー及びその位置センサ45(図3)と共に、前述したロックレバー装置を構成し、位置センサ45で検出されるゲートロックレバーの位置に応じてコントローラ60から出力される指令信号により開閉する。
コントローラ60は、位置センサ45に基づきゲートロックレバーが起きていると判定した場合、ロック弁46を閉じる。これによりパイロットポンプ41から電磁比例弁43a-43hへの圧油の供給が遮断され、操作レバー装置26,27による油圧アクチュエータの操作が無効化(ロック)される。この場合、操作レバー装置26,27の操作の有無に関わらず、油圧アクチュエータは動作不能となる。
反対に、コントローラ60は、位置センサ45に基づきゲートロックレバーが寝ていると判定した場合、ロック弁46を開ける。これによりパイロットポンプ41から電磁比例弁43a-43hに圧油が流れ、電磁比例弁43a-43hがパイロット圧を出力可能な状態となる。これにより、操作レバー装置26,27による油圧アクチュエータの操作が有効化(ロック解除)され、操作レバー装置26,27の操作に応じ、対応付けられた油圧アクチュエータが動作する。
-コントローラ-
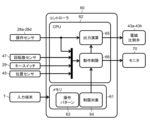
図3はコントローラの機能ブロック図である。
図3はコントローラの機能ブロック図である。
コントローラ60は、油圧ショベルに搭載された車載コンピュータであり、メモリ61と、CPU62とを含んで構成される。メモリ61は、対象機器の制御に必要なプログラムや各種データ、演算途中の一時データ等を記憶するRAM、ROM、HHD、SSD等の記憶装置である。CPU62は、メモリ61に記憶されたプログラムや各種データに基づき、各種演算や対象機器の制御等を実行する処理装置である。
・メモリ
メモリ61には、操作割当データ63が複数通り記憶されている。操作割当データ63は、油圧アクチュエータ(旋回モータ23、ブームシリンダ32、アームシリンダ34、バケットシリンダ36)の各動作に対する操作レバー装置26,27の操作の割り当て(操作割当)のデータである。
メモリ61には、操作割当データ63が複数通り記憶されている。操作割当データ63は、油圧アクチュエータ(旋回モータ23、ブームシリンダ32、アームシリンダ34、バケットシリンダ36)の各動作に対する操作レバー装置26,27の操作の割り当て(操作割当)のデータである。
操作割当データ63の一例を挙げる。例えば、左の操作レバー装置26の操作レバーを前に倒すと旋回モータ23が正転して右旋回動作し、後に倒すと旋回モータ23が逆転して左旋回動作する。また、左の操作レバー装置26の操作レバーを左に倒すとアームシリンダ34が収縮してアームダンプ動作し、右に倒すとアームシリンダ34が伸長してアームクラウド動作する。右の操作レバー装置27の操作レバーを前に倒すとブームシリンダ32が収縮してブーム下げ動作し、後に倒すとブームシリンダ32が伸長してブーム上げ動作する。また、右の操作レバー装置27の操作レバーを左に倒すとバケットシリンダ36が伸長してバケットクラウド動作し、右に倒すとバケットシリンダ36が収縮してバケットダンプ動作する。このような操作レバー装置26,27の操作と油圧アクチュエータの動作との関係を規定する操作割当データ63が、メモリ61に複数通り記憶されている。
また、メモリ61には、制限対象データ64も記憶可能に設けられている。制限対象データ64は、油圧アクチュエータの動作速度の制限(後述する動作制限66)について、制限対象となる対象油圧アクチュエータとその動作方向を規定するデータである。この制限対象データ64は、例えば誤操作による影響度を考慮して、旋回モータ23の正転及び逆転(右旋回及び左旋回)、アームシリンダ34の収縮(アームダンプ)といったように、対象油圧アクチュエータやその動作方向を任意に選択し設定することができるように構成している。
なお、制限対象データ64は、コントローラ60に入力端末Tを接続し、書き換え、削除又は追加等をすることができる。操作割当データ63も、書き換え、削除又は追加等についてはコントローラ60に入力端末Tを接続して行われる。但し、メモリ61に記憶されている複数の操作割当データ63から1つを選択する操作については、キャブ24に設置された入力装置(例えばモニタ70)を介してオペレータ等が行うことができるようになっている。
・CPU
また、CPU62は、メモリ61に記憶されたプログラムに従って、出力演算65、動作制限66等の機能を実行する。
また、CPU62は、メモリ61に記憶されたプログラムに従って、出力演算65、動作制限66等の機能を実行する。
出力演算65は、操作レバー装置26,27の操作に応じて対応する油圧アクチュエータを駆動する機能である。上記の通り、操作レバー装置26,27の操作に応じた信号が、操作センサ28a-28dからコントローラ60に入力される。CPU62は、出力演算65の機能により、操作センサ28a-28dからの信号に応じた指令信号(電流値)を演算し、対応する電磁比例弁43a-43hに出力する。その際、操作レバー装置26,27の操作方向と、その操作に応じて生成される指令信号の出力先(電磁比例弁43a-43h)の対応関係は、現在選択されている操作割当データ63による。
動作制限66は、操作レバー装置26,27が操作された場合、一定条件下でその操作による油圧アクチュエータの動作速度を制限する機能である。この機能の下、CPU62は、操作レバー装置26,27が操作された場合、その操作がエンジン25の始動後の初回操作であるか否かを判定し、エンジン25の始動後の初回操作であれば、その操作による油圧アクチュエータの動作速度を制限する。その際、CPU62は、キースイッチ29、回転数センサ47及び操作センサ28a-28dからの信号に基づき、操作レバー装置26,27の操作がエンジン25の始動後の初回操作であるかを判定する。また、動作速度の制限は、動作速度(例えば電磁比例弁43a-43hに対する指令信号)に予め設定された制限値(上限値)を設定し、制限値を超える速度で油圧アクチュエータが動作しないようにする方法で行われる。つまり、動作制限66の機能が働いた状態では、所定操作量以下の微動操作であれば、油圧アクチュエータは操作に応じた速度で動作するが、所定操作量を超える操作をしても、油圧アクチュエータは制限値(非常にゆっくりした微動速度)でしか動作しない。
その他、動作制限66の機能の一部として、CPU62は、ロックレバー装置による油圧アクチュエータの操作の無効化状態が設定時間を超えて継続した後における無効化状態が解除された後の初回操作(最初になされる操作)であるか否かを判定する。また、CPU62は、操作レバー装置26,27の無操作状態(傾倒されないで中立の状態)が設定時間を超えたか否かを判定する。操作レバー装置26,27の操作が、無効化状態が設定時間を超えて継続した後における無効化状態が解除された後の初回操作である場合、又は無操作状態が設定時間を超えた後の初回操作である場合、CPU62は、それら操作による油圧アクチュエータの動作速度を制限する。これらの場合における油圧アクチュエータの動作速度の制限の方法は、エンジン25の始動後の初回操作の場合と同様である。
なお、本実施形態の場合、前述した通りメモリ61には制限対象データ64が記憶されており、CPU62は、制限対象データ64に登録された動作に対応する操作がされた場合にのみ動作制限66を実行する。つまり、例えばエンジン始動後の初回操作時に実行する動作制限66では、制限対象データ64に設定された対象油圧アクチュエータがエンジン始動後初めて操作された場合に、その対象油圧アクチュエータの動作速度を制限する。操作無効状態の継続後の初回操作や無操作状態の継続中にされた操作の際に実行する動作制限66ついても、同様である。旋回モータ23、ブームシリンダ32、アームシリンダ34、バケットシリンダ36の全ての双方向の動作を制限対象データ64に登録すれば、操作レバー装置26,27の全ての操作について、動作制限66の機能が一律に適用され得る。
また、動作制限66の機能の一環として、CPU62は、油圧アクチュエータの動作速度の制限中、油圧アクチュエータの動作速度を制限していることをモニタ70に表示出力し、現在動作制限66の機能が実行されていることをオペレータに知らせる。
-動作指令-
図4はコントローラ60による油圧アクチュエータの動作指令の手順を表すフローチャートである。コントローラ60は、通電中に図4のフローを繰り返し実行する。
図4はコントローラ60による油圧アクチュエータの動作指令の手順を表すフローチャートである。コントローラ60は、通電中に図4のフローを繰り返し実行する。
・ステップS10
図4のフローの実行中、コントローラ60は、まずステップS10において、操作センサ28a-28dの信号に基づき、操作レバー装置26,27による操作がされているかをまず判定する。操作がされているかどうかは、予め設定された設定操作量を超える操作(例えば不感帯を超える操作)がされているかどうかで判定される。設定操作量の設定を調整し、油圧ショベルの振動や電気的な外乱等により操作判定値の変動によって意図的な操作がされていないのに操作がされていると誤判定されることを抑制する。コントローラ60は、操作レバー装置26,27の双方とも操作されていないと判定した場合、ステップS10に手順を戻し、操作レバー装置26,27の少なくとも一方が操作されるまでステップS10の手順を繰り返す。コントローラ60は、操作レバー装置26,27の少なくとも一方が前後左右の少なくともいずれかに操作されていると判定した場合、ステップS10からステップS20に手順を移す。
図4のフローの実行中、コントローラ60は、まずステップS10において、操作センサ28a-28dの信号に基づき、操作レバー装置26,27による操作がされているかをまず判定する。操作がされているかどうかは、予め設定された設定操作量を超える操作(例えば不感帯を超える操作)がされているかどうかで判定される。設定操作量の設定を調整し、油圧ショベルの振動や電気的な外乱等により操作判定値の変動によって意図的な操作がされていないのに操作がされていると誤判定されることを抑制する。コントローラ60は、操作レバー装置26,27の双方とも操作されていないと判定した場合、ステップS10に手順を戻し、操作レバー装置26,27の少なくとも一方が操作されるまでステップS10の手順を繰り返す。コントローラ60は、操作レバー装置26,27の少なくとも一方が前後左右の少なくともいずれかに操作されていると判定した場合、ステップS10からステップS20に手順を移す。
・ステップS20
ステップS20に手順を移した場合、コントローラ60は、現在されている操作(複数種の操作がされている場合はいずれかの操作)が、制限操作であるかを判定する。制限操作であるかどうかは、その操作が、現在選択されている操作割当データ63の下で、制限対象データ64に登録されている動作に割り当てられているかどうかで判定される。例えばブーム上げ動作が制限対象データ64として登録されている場合、現在選択されている操作割当データ63におけるブーム上げ操作(先述した例では操作レバー装置27の後傾操作)があった場合に、ステップS20の判定が満たされる。コントローラ60は、現在されている操作が制限操作でない場合、ステップS20からステップS76に手順を移し、制限操作である場合、ステップS20からステップS30に手順を移す。
ステップS20に手順を移した場合、コントローラ60は、現在されている操作(複数種の操作がされている場合はいずれかの操作)が、制限操作であるかを判定する。制限操作であるかどうかは、その操作が、現在選択されている操作割当データ63の下で、制限対象データ64に登録されている動作に割り当てられているかどうかで判定される。例えばブーム上げ動作が制限対象データ64として登録されている場合、現在選択されている操作割当データ63におけるブーム上げ操作(先述した例では操作レバー装置27の後傾操作)があった場合に、ステップS20の判定が満たされる。コントローラ60は、現在されている操作が制限操作でない場合、ステップS20からステップS76に手順を移し、制限操作である場合、ステップS20からステップS30に手順を移す。
・ステップS30
ステップS30に手順を移した場合、コントローラ60は、動作制限フラグがオン(有効)であるかを判定する。動作制限フラグとは、動作制限66の機能を実行する前提条件であり、動作制限フラグがオンである場合にのみ動作制限66の機能が実行される。コントローラ60は、動作制限フラグがオンの場合はステップS30からステップS66に手順を移し、動作制限フラグがオフの場合はステップS30からステップS40に手順を移す。
ステップS30に手順を移した場合、コントローラ60は、動作制限フラグがオン(有効)であるかを判定する。動作制限フラグとは、動作制限66の機能を実行する前提条件であり、動作制限フラグがオンである場合にのみ動作制限66の機能が実行される。コントローラ60は、動作制限フラグがオンの場合はステップS30からステップS66に手順を移し、動作制限フラグがオフの場合はステップS30からステップS40に手順を移す。
・ステップS40
ステップS40に手順を移した場合、コントローラ60は、操作センサ28a-28d、キースイッチ29及び回転数センサ47の信号に基づき、現在されている操作がエンジン始動後の初回操作かどうかを判定する。ステップS40でエンジン始動後の初回操作であるかを判定するアルゴリズムについては、図5を用いて後で説明する。コントローラ60は、現在されている操作がエンジン始動後の初回操作である場合はステップS40からステップS65に手順を移し、初回操作でない場合はステップS40からステップS50に手順を移す。
ステップS40に手順を移した場合、コントローラ60は、操作センサ28a-28d、キースイッチ29及び回転数センサ47の信号に基づき、現在されている操作がエンジン始動後の初回操作かどうかを判定する。ステップS40でエンジン始動後の初回操作であるかを判定するアルゴリズムについては、図5を用いて後で説明する。コントローラ60は、現在されている操作がエンジン始動後の初回操作である場合はステップS40からステップS65に手順を移し、初回操作でない場合はステップS40からステップS50に手順を移す。
・ステップS50
ステップS50に手順を移した場合、コントローラ60は、位置センサ45の信号に基づき、現在されている操作(制限操作)が、ロックレバー装置による油圧アクチュエータの操作の無効化状態が設定時間を超えて継続した後の初回操作であるかを判定する。設定時間は、予め設定されてメモリ61に記憶された値であり、例えば1分、5分等といった数値である。この設定時間は、キャブ24に設置された入力装置(例えばモニタ70)でオペレータが変更できるようにすることができる。現在行われている操作が、操作無効化状態が設定時間を超えて継続した後の初回操作である場合、コントローラ60は、ステップS50からステップS65に手順を移す。現在行われている操作が、操作無効化状態が設定時間を超えて継続した後の初回操作ではない場合、コントローラ60は、ステップS50からステップS60に手順を移す。
ステップS50に手順を移した場合、コントローラ60は、位置センサ45の信号に基づき、現在されている操作(制限操作)が、ロックレバー装置による油圧アクチュエータの操作の無効化状態が設定時間を超えて継続した後の初回操作であるかを判定する。設定時間は、予め設定されてメモリ61に記憶された値であり、例えば1分、5分等といった数値である。この設定時間は、キャブ24に設置された入力装置(例えばモニタ70)でオペレータが変更できるようにすることができる。現在行われている操作が、操作無効化状態が設定時間を超えて継続した後の初回操作である場合、コントローラ60は、ステップS50からステップS65に手順を移す。現在行われている操作が、操作無効化状態が設定時間を超えて継続した後の初回操作ではない場合、コントローラ60は、ステップS50からステップS60に手順を移す。
・ステップS60
ステップS60に手順を移した場合、コントローラ60は、操作レバー装置26,27の無操作状態が設定時間を超えたか否かを判定する。この判定に用いる設定時間は、予め設定されてメモリ61に記憶された値(例えば1分、5分)といった数値であり、ステップS50の判定に用いる設定時間と同値としても良いし、異なる値としても良い。この設定時間も、キャブ24に設置された入力装置(例えばモニタ70)でオペレータが変更できるようにすることができる。現在されている操作が、無操作状態が設定時間を超えた後の初回操作でなければ、コントローラ60は、ステップS60からステップS76に手順を移す。現在されている操作が、無操作状態が設定時間を超えた後の初回操作である場合、コントローラ60は、ステップS60からステップS65に手順を移す。
ステップS60に手順を移した場合、コントローラ60は、操作レバー装置26,27の無操作状態が設定時間を超えたか否かを判定する。この判定に用いる設定時間は、予め設定されてメモリ61に記憶された値(例えば1分、5分)といった数値であり、ステップS50の判定に用いる設定時間と同値としても良いし、異なる値としても良い。この設定時間も、キャブ24に設置された入力装置(例えばモニタ70)でオペレータが変更できるようにすることができる。現在されている操作が、無操作状態が設定時間を超えた後の初回操作でなければ、コントローラ60は、ステップS60からステップS76に手順を移す。現在されている操作が、無操作状態が設定時間を超えた後の初回操作である場合、コントローラ60は、ステップS60からステップS65に手順を移す。
・ステップS65
ステップS65に手順を移した場合、コントローラ60は、動作制限フラグをオン(有効)にしてステップS66に手順を移す。つまり、ステップS30の時点で動作制限フラグがオフ(無効)であっても、ステップS40,S50,S60のいずれかの判定が満たされれば、動作制限フラグがオンになる(有効化される)。
ステップS65に手順を移した場合、コントローラ60は、動作制限フラグをオン(有効)にしてステップS66に手順を移す。つまり、ステップS30の時点で動作制限フラグがオフ(無効)であっても、ステップS40,S50,S60のいずれかの判定が満たされれば、動作制限フラグがオンになる(有効化される)。
・ステップS66
ステップS66に手順を移すと(つまり制限操作が行われ、かつ動作制限フラグがオンである場合)、コントローラ60は、前述した動作制限66の機能を実行し、またモニタ70に動作制限機能が実行されていることを表示する。これにより、現在されている操作(制限操作)が所定操作量を超える操作であっても、対応する油圧アクチュエータは、操作量に応じて速度ではなく、制限のかかった緩慢な速度で動作する。
ステップS66に手順を移すと(つまり制限操作が行われ、かつ動作制限フラグがオンである場合)、コントローラ60は、前述した動作制限66の機能を実行し、またモニタ70に動作制限機能が実行されていることを表示する。これにより、現在されている操作(制限操作)が所定操作量を超える操作であっても、対応する油圧アクチュエータは、操作量に応じて速度ではなく、制限のかかった緩慢な速度で動作する。
・ステップS70
動作制限66の機能の実行中、コントローラ60は、操作センサ28a-28dの信号に基づき、現在操作されている操作レバー(操作レバー装置26,27の双方が操作されている場合は双方の操作レバー)が中立位置に復帰したかを判定する。中立位置に戻ったかどうかは、ステップS10の判定に用いた設定操作量以下の操作量に戻ったかどうかで判定される。現在の操作が継続する間、コントローラ60は、ステップS66を繰り返し実行して動作制限66の機能の実行を継続する。現在操作されている操作レバーが中立位置に復帰したら、コントローラ60は、動作制限66の機能の実行とモニタ70へのその旨の表示出力を停止し、ステップS70からステップS75に手順を移す。
動作制限66の機能の実行中、コントローラ60は、操作センサ28a-28dの信号に基づき、現在操作されている操作レバー(操作レバー装置26,27の双方が操作されている場合は双方の操作レバー)が中立位置に復帰したかを判定する。中立位置に戻ったかどうかは、ステップS10の判定に用いた設定操作量以下の操作量に戻ったかどうかで判定される。現在の操作が継続する間、コントローラ60は、ステップS66を繰り返し実行して動作制限66の機能の実行を継続する。現在操作されている操作レバーが中立位置に復帰したら、コントローラ60は、動作制限66の機能の実行とモニタ70へのその旨の表示出力を停止し、ステップS70からステップS75に手順を移す。
・ステップS75
ステップS75に手順を移すと、コントローラ60は、動作制限フラグをオフ(無効)にしてステップS76に手順を移し、ステップS10に手順を戻す。
ステップS75に手順を移すと、コントローラ60は、動作制限フラグをオフ(無効)にしてステップS76に手順を移し、ステップS10に手順を戻す。
・ステップS76
ステップS76に手順を移した場合、コントローラ60は、動作制限66の機能を実行することなく、操作レバー装置26,27の操作に応じて対応する油圧アクチュエータを制御する。一部図示省略しているが、この通常制御中、コントローラ60は、ステップS70と同じ要領で現在操作されている操作レバーが中立位置に復帰したかを判定し、現在操作されている操作レバーが中立位置に戻ったらステップS10に手順を戻す。従って、ステップS40,S50,S60のいずれかの判定が満たされて動作制限フラグがオンになる状況を除き、操作レバー装置26,27が操作された場合はステップS76に手順が移行して通常制御が実行される。
ステップS76に手順を移した場合、コントローラ60は、動作制限66の機能を実行することなく、操作レバー装置26,27の操作に応じて対応する油圧アクチュエータを制御する。一部図示省略しているが、この通常制御中、コントローラ60は、ステップS70と同じ要領で現在操作されている操作レバーが中立位置に復帰したかを判定し、現在操作されている操作レバーが中立位置に戻ったらステップS10に手順を戻す。従って、ステップS40,S50,S60のいずれかの判定が満たされて動作制限フラグがオンになる状況を除き、操作レバー装置26,27が操作された場合はステップS76に手順が移行して通常制御が実行される。
-エンジン始動後初回操作判定-
図5はコントローラ60によるエンジン始動後初回操作判定の手順を表すフローチャートである。コントローラ60は、図4で説明した動作指令のフローと並行して図5のフローを通電中に繰り返し実行し、現在されている操作がエンジン始動後の初回操作であるのかどうかを識別する。図4で説明したステップS40の判定は、図5のフローによる識別に基づいてされる。
図5はコントローラ60によるエンジン始動後初回操作判定の手順を表すフローチャートである。コントローラ60は、図4で説明した動作指令のフローと並行して図5のフローを通電中に繰り返し実行し、現在されている操作がエンジン始動後の初回操作であるのかどうかを識別する。図4で説明したステップS40の判定は、図5のフローによる識別に基づいてされる。
・ステップS80
図5のフローの実行中、コントローラ60は、まずステップS80において、エンジン停止フラグがオン(有効)であるかを判定する。エンジン停止フラグとは、ステップS81においてエンジン回転数が0である、つまりエンジン25が停止状態であると判定された場合にオンになるフラグである。コントローラ60は、エンジン停止フラグがオンの場合はステップS80からステップS83に手順を移し、エンジン停止フラグがオフの場合はステップS80からステップS81に手順を移す。
図5のフローの実行中、コントローラ60は、まずステップS80において、エンジン停止フラグがオン(有効)であるかを判定する。エンジン停止フラグとは、ステップS81においてエンジン回転数が0である、つまりエンジン25が停止状態であると判定された場合にオンになるフラグである。コントローラ60は、エンジン停止フラグがオンの場合はステップS80からステップS83に手順を移し、エンジン停止フラグがオフの場合はステップS80からステップS81に手順を移す。
・ステップS81
ステップS81に手順を移した場合、コントローラ60は、回転数センサ47の信号に基づき、エンジン回転数が0であるか、つまりエンジン25が停止状態であるかを判定する。エンジン回転数が0より大きくエンジン稼動中と判定した場合、コントローラ60は、図5の手順の現在のサイクルを終えて次のサイクルのステップS80に移行する。エンジン回転数が0でエンジン停止中と判定した場合、コントローラ60は、ステップS81からステップS82に手順を移す。
ステップS81に手順を移した場合、コントローラ60は、回転数センサ47の信号に基づき、エンジン回転数が0であるか、つまりエンジン25が停止状態であるかを判定する。エンジン回転数が0より大きくエンジン稼動中と判定した場合、コントローラ60は、図5の手順の現在のサイクルを終えて次のサイクルのステップS80に移行する。エンジン回転数が0でエンジン停止中と判定した場合、コントローラ60は、ステップS81からステップS82に手順を移す。
・ステップS82
ステップS82に手順を移した場合、コントローラ60は、エンジン停止フラグをオンにしてメモリ61に記憶し、ステップS83に手順を移す。
ステップS82に手順を移した場合、コントローラ60は、エンジン停止フラグをオンにしてメモリ61に記憶し、ステップS83に手順を移す。
・ステップS83
ステップS83に手順を移すと、コントローラ60は、キースイッチ29の信号に基づき、キースイッチ29がSTART位置であるかを判定する。キースイッチ29のSTART位置は、エンジン始動の際にクランキングを行うための位置であり、エンジン始動の操作がされているかの判定に用いることができる。キースイッチ29がSTART位置にない場合、コントローラ60は、図5の手順の現在のサイクルを終えて次のサイクルのステップS80に移行する。キースイッチ29がSTART位置にある場合、コントローラ60は、ステップS83からステップS84に手順を移す。
ステップS83に手順を移すと、コントローラ60は、キースイッチ29の信号に基づき、キースイッチ29がSTART位置であるかを判定する。キースイッチ29のSTART位置は、エンジン始動の際にクランキングを行うための位置であり、エンジン始動の操作がされているかの判定に用いることができる。キースイッチ29がSTART位置にない場合、コントローラ60は、図5の手順の現在のサイクルを終えて次のサイクルのステップS80に移行する。キースイッチ29がSTART位置にある場合、コントローラ60は、ステップS83からステップS84に手順を移す。
・ステップS84
ステップS84に手順を移すと、コントローラ60は、回転数センサ47の信号に基づき、エンジン25が始動したかを判定する。エンジン25が始動したかは、回転数センサ47で検出されるエンジン回転数が、予め設定された設定回転数以上に達したかどうかで判定することができる。一例として、スターターモータによるクランキング回転数をエンジン回転数が超えた段階で、エンジン25が始動したと判定することができる。エンジン25がまだ始動していない場合、コントローラ60は、図5の手順の現在のサイクルを終えて次のサイクルのステップS80に移行する。エンジン25が始動した場合、コントローラ60は、ステップS84からステップS85に手順を移す。
ステップS84に手順を移すと、コントローラ60は、回転数センサ47の信号に基づき、エンジン25が始動したかを判定する。エンジン25が始動したかは、回転数センサ47で検出されるエンジン回転数が、予め設定された設定回転数以上に達したかどうかで判定することができる。一例として、スターターモータによるクランキング回転数をエンジン回転数が超えた段階で、エンジン25が始動したと判定することができる。エンジン25がまだ始動していない場合、コントローラ60は、図5の手順の現在のサイクルを終えて次のサイクルのステップS80に移行する。エンジン25が始動した場合、コントローラ60は、ステップS84からステップS85に手順を移す。
・ステップS85
ステップS85に手順を移すと、コントローラ60は、エンジン停止フラグをオフ(無効)にしてメモリ61に記憶し、ステップ86に手順を移す。
ステップS85に手順を移すと、コントローラ60は、エンジン停止フラグをオフ(無効)にしてメモリ61に記憶し、ステップ86に手順を移す。
・ステップS86
ステップS86に手順を移すと、コントローラ60は、エンジン始動後初回フラグをオン(有効)にしてメモリ61に記憶し、ステップ87に手順を移す。
ステップS86に手順を移すと、コントローラ60は、エンジン始動後初回フラグをオン(有効)にしてメモリ61に記憶し、ステップ87に手順を移す。
・ステップS87
ステップS87に手順を移すと、コントローラ60は、操作センサ28a-28dの信号に基づき、操作レバー装置26,27による操作(制限操作)がされているかを判定する。この判定は、例えば図4のステップS10,S20の判定と同じ要領で実行される。操作がされていなければ、コントローラ60は、操作がされるまでステップS87の手順を繰り返し実行する。操作がされた場合、コントローラ60は、ステップS87からステップS88に手順を移す。
ステップS87に手順を移すと、コントローラ60は、操作センサ28a-28dの信号に基づき、操作レバー装置26,27による操作(制限操作)がされているかを判定する。この判定は、例えば図4のステップS10,S20の判定と同じ要領で実行される。操作がされていなければ、コントローラ60は、操作がされるまでステップS87の手順を繰り返し実行する。操作がされた場合、コントローラ60は、ステップS87からステップS88に手順を移す。
・ステップS88
ステップS88に手順を移すと、コントローラ60は、操作センサ28a-28dの信号に基づき、現在操作されている操作レバー装置26,27の操作レバーが中立位置に復帰したかどうかを判定する。この判定は、例えば図4のステップS70の判定と同じ要領で実行される。現在操作されている操作レバーが中立位置に復帰していなければ、コントローラ60は、操作レバーが中立位置に戻るまでステップS88の手順を繰り返し実行する。現在操作されている操作レバーが中立位置に復帰したら、コントローラ60は、ステップS88からステップS89に手順を移す。
ステップS88に手順を移すと、コントローラ60は、操作センサ28a-28dの信号に基づき、現在操作されている操作レバー装置26,27の操作レバーが中立位置に復帰したかどうかを判定する。この判定は、例えば図4のステップS70の判定と同じ要領で実行される。現在操作されている操作レバーが中立位置に復帰していなければ、コントローラ60は、操作レバーが中立位置に戻るまでステップS88の手順を繰り返し実行する。現在操作されている操作レバーが中立位置に復帰したら、コントローラ60は、ステップS88からステップS89に手順を移す。
・ステップS89
ステップS89に手順を移すと、コントローラ60は、エンジン始動後初回フラグをオフ(無効)にしてメモリ61に記憶し、図5の手順の現在のサイクルを終えて次のサイクルのステップS80に移行する。
ステップS89に手順を移すと、コントローラ60は、エンジン始動後初回フラグをオフ(無効)にしてメモリ61に記憶し、図5の手順の現在のサイクルを終えて次のサイクルのステップS80に移行する。
図4のステップS40の判定は、エンジン始動後初回フラグがオン(有効)であるとき、すなわち図5のステップS86からステップS89の間の手順を実行している間に機会が到来した場合に満たされる。他方、エンジン始動後初回フラグがオフ(無効)であるとき、すなわち図5のステップS80からステップS86の間の手順を実行している間に図4のステップS40の判定の機会が到来した場合、ステップS40の判定は満たされない。
-効果-
(1)本実施形態においては、上記の通り操作レバー装置26,27の操作がエンジン始動後の初回操作である場合、その操作による油圧アクチュエータの動作速度が制限される。従って、オペレータが油圧ショベルの運転を開始するに当たり、仮に操作割当を誤認していたとしても、操作レバー装置26,27の操作によって油圧アクチュエータが急動作することがない。また、油圧アクチュエータの緩慢な動作から、オペレータは直ちに操作割当又は操作割当の誤認を認識することができる。そして、一旦操作レバーを中立に戻して改めて操作をすることで動作制限66の機能は解除され、オペレータは操作割当を意識しつつ操作レバー装置26,27を用いた通常の作業に速やかに移行することができる。また、本実施形態のように操作割当の変更機能を搭載した機種であれば、オペレータの馴染んだ操作割当と異なることが分かれば、その時点で操作割当に切り換えることもできる。
(1)本実施形態においては、上記の通り操作レバー装置26,27の操作がエンジン始動後の初回操作である場合、その操作による油圧アクチュエータの動作速度が制限される。従って、オペレータが油圧ショベルの運転を開始するに当たり、仮に操作割当を誤認していたとしても、操作レバー装置26,27の操作によって油圧アクチュエータが急動作することがない。また、油圧アクチュエータの緩慢な動作から、オペレータは直ちに操作割当又は操作割当の誤認を認識することができる。そして、一旦操作レバーを中立に戻して改めて操作をすることで動作制限66の機能は解除され、オペレータは操作割当を意識しつつ操作レバー装置26,27を用いた通常の作業に速やかに移行することができる。また、本実施形態のように操作割当の変更機能を搭載した機種であれば、オペレータの馴染んだ操作割当と異なることが分かれば、その時点で操作割当に切り換えることもできる。
以上のように、本実施形態によれば、操作割当の誤認による誤操作を抑制することができる。
(2)また、本実施形態では、操作レバー装置26,27の操作について一律に動作制限66の機能を適用するのではなく、メモリ61に記憶された制限対象データ64に対応する操作についてのみ動作制限66の機能の適用対象とすることができる。
例えば、部分的に共通する操作割当A,Bがあるとする。操作割当Aが選択された油圧ショベルを操作割当Bのつもりでオペレータが運転する場合を考えると、エンジン始動後の初回の操作が操作割当A,Bに共通する操作である可能性がある。この場合、オペレータは操作割当の誤認を自覚しないまま、動作制限66の機能を解除すべく操作レバーを戻して通常操作に移行する可能性もある。
それに対し、本実施形態では、動作制限66の機能の適用対象を設定することができるので、例えばオペレータ自身が特に気を付けたい操作を選択して動作制限66の機能の適用対象に設定することで、上記のような場合にも柔軟に適用できる。操作レバー装置26,27の全ての操作を動作制限66の適用対象操作とすべき場合は、全ての操作を適用対象に設定することもできる。
但し、操作レバー装置26,27の全ての操作に一律に動作制限66の機能を適用すべき場合は、制限対象データ64の選択設定機能は必ずしも必要なく省略可能である。
(3)ロックレバー装置による操作無効化状態が一定時間以上継続した場合、オペレータが一度降車し、その間に例えば別の作業機械を運転していたり、作業工程の確認や各種設定変更等をしていたりする場合もある。また、エンジン25を動かしたままオペレータが交代する場合もある。このような場合は、エンジン始動後の初回操作でなくても、操作割当の誤認による誤操作が発生する可能性がある。
それに対し、本実施形態では、ロックレバー装置による操作無効化状態が設定時間を超えて継続した後の初回操作である場合、油圧アクチュエータの動作速度を制限する。これにより、一時離席後の再操作時やオペレータ交代時の誤操作も効果的に抑制することができる。
また、操作無効化状態が継続した状況を判定するための設定時間は、短い方が動作制限66の機能の実行機会が増えて誤操作抑止の効果は上がるが、過度に動作制限66の機能が実行される煩わしくなり得る。それに対し、設定時間はオペレータ等が設定を変更することができるので、自らの作業予定や油圧ショベルの使用状況等を考慮して設定することで、誤操作抑止効果と作業効率のバランスを調整することができる。
(4)操作レバー装置26,27が一定時間以上操作されない場合も、オペレータが例えば作業工程の確認等を行っている可能性があり、やはり操作割当の誤認による誤操作が発生する可能性がある。
それに対し、本実施形態では、無操作時間が設定時間を超えて継続している最中に操作がされた場合、油圧アクチュエータの動作速度を制限して、上記(3)と同じく誤操作を効果的に抑制することができる。
また、無操作時間が一定以上継続した状況を判定するための設定時間は、短い方が動作制限66の機能の実行機会が増えて誤操作抑止の効果は上がるが、過度に動作制限66の機能が実行される煩わしくなり得る。この設定時間もオペレータ等が設定を変更することができるので、オペレータ自らが諸般の事情を考慮して設定することで、誤操作抑止効果と作業効率のバランスを調整することができる。
(5)動作制限66の機能が実行されている間、その旨がモニタ70に表示されるので、オペレータはモニタ70の表示により動作制限66の機能が働いていることを認識することができる。
<第2実施形態>
図6は本発明の第2実施形態に係る建設機械に備えられたコントローラの機能ブロック図である。図6において第1実施形態と同様の又は対応する要素には既出図面と同符号を付して説明を省略する。
図6は本発明の第2実施形態に係る建設機械に備えられたコントローラの機能ブロック図である。図6において第1実施形態と同様の又は対応する要素には既出図面と同符号を付して説明を省略する。
本実施形態が第1実施形態と相違する点は、第1実施形態において動作制限66の機能が実行される場面(ステップS40-S60の判定が満たされる場合)でも、現在されている操作が緩やかな操作であれば動作制限66が適用されない点である。具体的には、本実施形態において、コントローラ60がCPU62で実行する機能として急操作判定67が加わっており、操作が急操作であるかが判定される。
急操作判定67において、コントローラ60は、操作センサ28a-28dからの信号に基づき、操作レバー装置26,27の操作量の増加率が設定増加率より大きいかを判定する。制限対象データ64が設定されている場合、急操作判定67において増加率が判定される操作は、制限対象データ64に設定された対象油圧アクチュエータについての操作である。また、設定増加率は、予め設定されてメモリ61に記憶されている。コントローラ60は、操作レバー装置26,27の操作の増加率が設定増加率より大きい場合にのみ、その操作を動作制限66の機能の実行対象とし、ステップS40-S60の判定が満たされる場合に油圧アクチュエータの動作速度を制限する。
図7は急操作判定を説明する模式図である。
図7に示したように、オペレータによる操作レバー装置26,27の操作が急操作であるかどうかは、時間当たりの操作レバー装置26,27のレバー操作速度の大小(操作量の増加率の大小)で判定される。具体的には、上記の設定増加率よりも増加率の大きい操作が急操作と判定される。図7においては、点線で示した設定増加率に対し、単位時間当たりの操作量の増加が多い操作αは急操作と判定され、単位時間当たりの操作量の増加が少ない操作βは緩やかな操作と判定される。
図8は本実施形態における動作制限を説明する模式図である。
同図に示した通り、急操作である操作αについては、ステップS40-S60(図4)のいずれかの判定が満たされる場合は、動作制限66が適用される。つまり、操作量が設定値に到達した時点で電磁比例弁に対する指令信号は制限値で制限され、操作量が設定値を超えて増加しても電磁比例弁に対する指令信号は制限値から増加しない。
それに対し、緩やかな操作βについては、ステップS40-S60(図4)のいずれかの判定が満たされる場合でも、動作制限66は適用されず、操作量に応じた指令信号が出力される。つまり、設定増加率よりも低い増加率で操作量が設定値に到達した場合、そのまま操作量が設定値を超えて増加すれば、電磁比例弁に対する指令信号が制限値を超えて増加する。
なお、設定増加率は、レバー操作により実際に油圧アクチュエータが動き出すまでの応答時間も考慮して決定する必要がある。また、建設機械の機種や車格、個体差により、操作感度、電磁比例弁43a-43hの応答性、油圧アクチュエータの応答性に差があるため、設定増加率は入力装置(例えばモニタ70)でオペレータ等が行うことができるように構成することが望ましい。更に、油圧アクチュエータの応答性には作動油温度も大きく影響する。そのため、例えば温度センサにより測定される作動油温度がコントローラ60に入力され、予め設定されたアルゴリズムでコントローラ60において作動油温度に応じて設定増加率が補正されるような構成も好ましい。
図9は本実施形態のコントローラによる油圧アクチュエータの動作指令の手順を表すフローチャートである。コントローラ60は、通電中に図9のフローを繰り返し実行する。図9は第1実施形態の図4に対応しており、図4のフローと同一の又は対応する手順については、図9のフローにおいて図4と同一の番号を付して説明を省略する。
図9のフローが図4のフローと相違する点は、ステップS10とステップS20の間に急操作を判定するステップS15が介在している点であり、その他の手順について図9のフローと図4のフローが同様である。
つまり、操作レバー装置26,27の操作がされている場合、コントローラ60は、ステップS10からステップS15に手順を移し、図7で説明したようにその操作が急操作であるかを判定する。操作が緩やかな操作であれば、コントローラ60は、ステップS30-S60の判定を行うことなくステップS15からステップS76に手順を移し、操作に応じた油圧アクチュエータの通常制御を実行する。操作が急操作であれば、コントローラ60は、ステップS15からステップS30に手順を移し、第1実施形態と同様にステップS30-S60の判定を実行し、いずれかの判定が満たされれば動作制限66の機能を実行する。
本実施形態においても、ステップS40-60の判定が満たされる操作が行われた場合に動作制限66の機能が実行され、第1実施形態と同様の効果が得られる。
加えて、操作が緩やかである場合には、仮にステップS40-60の判定が満たされ得る操作であっても、例外的に動作制限66の機能の実行対象から除外し、動作制限66の機能の実行を省略する。微操作で慎重に操作し始めるオペレータの場合、仮に操作割当を正しく認識していなくても微操作により自ら操作割当の確認を試行する傾向がある。このようなオペレータにとっては、ステップS40-S60の判定により一律に動作制限66の機能が実行されると煩わしい場合がある。
そこで、本実施形態のように、微操作の場合は動作制限66の実行対象外とし、一定以上の増加率を伴う操作のみを動作制限66の実行対象とすることにより、微操作に動作制限66が介入することがなくなる。これにより、特に操作が慎重なオペレータについて動作制限66の介入による煩わしさや違和感を軽減することができる。
<変形例>
以上の実施形態では、操作レバー装置26,27として電気レバー装置を採用した建設機械に本発明を適用した場合を例に挙げて説明したが、操作レバーでパイロット弁を操作する油圧式の操作レバー装置を採用した建設機械にも本発明は適用可能である。油圧式の操作レバー装置でも、セレクターバルブで操作割当が切り換え可能なものが存在する。このような建設機械においても、例えば操作センサとしてレバー操作量を検出するポテンショメータ又はパイロット圧を検出する圧力計を用いることで、上記同様に動作制限66の実行の可否を判定することができる。また、パイロットライン44に減圧弁を設け、パイロット弁に供給される圧油(元圧)を減じることにより、パイロット圧に制限をかけることができる。
以上の実施形態では、操作レバー装置26,27として電気レバー装置を採用した建設機械に本発明を適用した場合を例に挙げて説明したが、操作レバーでパイロット弁を操作する油圧式の操作レバー装置を採用した建設機械にも本発明は適用可能である。油圧式の操作レバー装置でも、セレクターバルブで操作割当が切り換え可能なものが存在する。このような建設機械においても、例えば操作センサとしてレバー操作量を検出するポテンショメータ又はパイロット圧を検出する圧力計を用いることで、上記同様に動作制限66の実行の可否を判定することができる。また、パイロットライン44に減圧弁を設け、パイロット弁に供給される圧油(元圧)を減じることにより、パイロット圧に制限をかけることができる。
また、操作割当の切換機能を持つ建設機械に本発明を適用した場合を例に挙げて説明したが、操作割当の切換機能のない建設機械にも本発明は適用可能である。操作割当が切り換えられない建設機械であっても、例えば初回搭乗時等には、オペレータが操作割当を誤認し得るためである。
また、ロック弁46に電磁弁を設けた場合を例に挙げて説明したが、ゲートロックレバーと機械的にリンクした機械式のロック弁を採用した建設機械にも本発明は適用可能である。この場合でも、ゲートロックレバーのポジションが位置センサ45で検出されてコントローラ60に入力されるようにすれば、ステップS50(図4)の判定を実行することができる。
また、動作制限66の実行形態として電磁比例弁43a-43hへの指令信号に制限値を設ける例を説明したが、操作量に応じて演算される指令信号に1未満の(例えば0.1程度)の係数を掛けて動作速度を減じる等、他の形態も適宜採用できる。
また、原動機としてエンジンを例に挙げて説明したが、原動機はエンジンに限られず、電動モータや燃料電池等を原動機としても良い。また、これらを組み合わせたものを原動機としても良い。
また、原動機としてエンジンを例に挙げて説明したが、原動機はエンジンに限られず、電動モータや燃料電池等を原動機としても良い。また、これらを組み合わせたものを原動機としても良い。
23…旋回モータ(油圧アクチュエータ)、25…エンジン、26,27…操作レバー装置、28a-28d…操作センサ、29…キースイッチ、32…ブームシリンダ(油圧アクチュエータ)、34…アームシリンダ(油圧アクチュエータ)、36…バケットシリンダ(油圧アクチュエータ)、40…油圧ポンプ、46…ロック弁(ロックレバー装置)、47…回転数センサ、60…コントローラ、61…メモリ、70…モニタ
Claims (6)
- 原動機と、
前記原動機により駆動され圧油を吐出する油圧ポンプと、
前記油圧ポンプにより吐出される圧油により動作する複数の油圧アクチュエータと、
前記油圧アクチュエータを操作する複数の操作レバー装置と、
前記原動機を始動するキースイッチと、
前記原動機の回転数を検出する回転数センサと、
前記操作レバー装置の操作を検出する複数の操作センサと、
前記操作レバー装置の操作に応じて対応する油圧アクチュエータの動作を制御するコントローラと
を備えた建設機械において、
前記コントローラは、
前記キースイッチ、前記回転数センサ及び前記複数の操作センサからの信号に基づき、前記操作レバー装置の操作が前記原動機の始動後の初回操作であるか否かを判定し、
前記操作レバー装置の操作が前記原動機の始動後の初回操作であると判定された場合、前記油圧アクチュエータの動作速度を制限する
ことを特徴とする建設機械。 - 請求項1に記載の建設機械において、
前記コントローラは、前記油圧アクチュエータのうち、制限対象とする油圧アクチュエータと、制限対象とする前記油圧アクチュエータの動作方向とを設定可能とすることを特徴とする建設機械。 - 請求項1に記載の建設機械において、
前記コントローラは、前記操作センサからの信号に基づき、前記操作レバー装置の操作量の増加率が設定増加率より大きいか否かを判定し、前記増加率が前記設定増加率より大きいと判定された場合にのみ前記油圧アクチュエータの動作速度を制限することを特徴とする建設機械。 - 請求項1に記載の建設機械において、
前記操作レバー装置による前記油圧アクチュエータの操作を無効化するロックレバー装置を備え、
前記コントローラは、
前記ロックレバー装置による前記油圧アクチュエータの操作の無効化状態が設定時間を超え、前記無効化状態が解除された後の初回操作であるか否かを判定し、
前記操作レバー装置の操作が、前記無効化状態が設定時間を超え、前記無効化状態が解除された後の初回操作であると判定された場合、前記油圧アクチュエータの動作速度を制限する
ことを特徴とする建設機械。 - 請求項1に記載の建設機械において、
前記コントローラは、
前記操作レバー装置の無操作状態が設定時間を超えたか否かを判定し、
前記操作レバー装置の無操作状態が設定時間を超えたことが判定され、前記操作レバー装置の操作が、前記操作レバー装置の無操作状態が設定時間を超えた後の初回操作である場合、前記油圧アクチュエータの動作速度を制限する
ことを特徴とする建設機械。 - 請求項1に記載の建設機械において、
モニタを備え、
前記コントローラは、前記油圧アクチュエータの動作速度が制限されている場合に、前記油圧アクチュエータの動作速度が制限されていることを前記モニタに表示させる
ことを特徴とする建設機械。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022052534 | 2022-03-28 | ||
| JP2022052534 | 2022-03-28 | ||
| PCT/JP2023/012181 WO2023190329A1 (ja) | 2022-03-28 | 2023-03-27 | 建設機械 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2023190329A1 JPWO2023190329A1 (ja) | 2023-10-05 |
| JP7577896B2 true JP7577896B2 (ja) | 2024-11-05 |
Family
ID=88202338
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024512452A Active JP7577896B2 (ja) | 2022-03-28 | 2023-03-27 | 建設機械 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US12480281B2 (ja) |
| EP (1) | EP4375430A4 (ja) |
| JP (1) | JP7577896B2 (ja) |
| KR (1) | KR20240035607A (ja) |
| CN (1) | CN117881859A (ja) |
| WO (1) | WO2023190329A1 (ja) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000104291A (ja) | 1998-09-29 | 2000-04-11 | Yutani Heavy Ind Ltd | 建設機械の誤動作防止装置 |
| JP2021110136A (ja) | 2020-01-09 | 2021-08-02 | 日立建機株式会社 | 作業機械 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3607089B2 (ja) * | 1998-09-03 | 2005-01-05 | 日立建機株式会社 | 油圧建設機械の油圧ポンプのトルク制御装置 |
| JP2006144296A (ja) | 2004-11-17 | 2006-06-08 | Hitachi Constr Mach Co Ltd | 作業機械の操作パターン切換装置 |
| JP5185349B2 (ja) * | 2010-10-08 | 2013-04-17 | 日立建機株式会社 | ハイブリッド式建設機械 |
| US10988914B2 (en) * | 2016-09-16 | 2021-04-27 | Hitachi Construction Machinery Tierra Co., Ltd | Hybrid work machine |
| WO2019044665A1 (ja) * | 2017-08-28 | 2019-03-07 | Ntn株式会社 | 転動部品、転がり軸受、自動車電装補機用転がり軸受及び増減速機用転がり軸受 |
| JP7167224B2 (ja) * | 2021-03-19 | 2022-11-08 | 日立建機株式会社 | 作業機械 |
-
2023
- 2023-03-27 WO PCT/JP2023/012181 patent/WO2023190329A1/ja not_active Ceased
- 2023-03-27 KR KR1020247006163A patent/KR20240035607A/ko active Pending
- 2023-03-27 JP JP2024512452A patent/JP7577896B2/ja active Active
- 2023-03-27 EP EP23780339.0A patent/EP4375430A4/en active Pending
- 2023-03-27 US US18/685,773 patent/US12480281B2/en active Active
- 2023-03-27 CN CN202380013322.7A patent/CN117881859A/zh active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000104291A (ja) | 1998-09-29 | 2000-04-11 | Yutani Heavy Ind Ltd | 建設機械の誤動作防止装置 |
| JP2021110136A (ja) | 2020-01-09 | 2021-08-02 | 日立建機株式会社 | 作業機械 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20240035607A (ko) | 2024-03-15 |
| EP4375430A4 (en) | 2025-07-16 |
| JPWO2023190329A1 (ja) | 2023-10-05 |
| CN117881859A (zh) | 2024-04-12 |
| WO2023190329A1 (ja) | 2023-10-05 |
| US12480281B2 (en) | 2025-11-25 |
| EP4375430A1 (en) | 2024-05-29 |
| US20250043542A1 (en) | 2025-02-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107532409B (zh) | 工程机械的控制装置 | |
| JP5228132B1 (ja) | ホイールローダ | |
| KR102478478B1 (ko) | 작업 기계 | |
| WO2013145528A1 (ja) | 制御装置及びこれを備えた建設機械 | |
| US9340955B2 (en) | Hydraulic control device for work vehicle | |
| KR20210152559A (ko) | 작업 기계 | |
| KR20190109549A (ko) | 건설기계의 제어 시스템 및 건설기계의 제어 방법 | |
| US5174114A (en) | Hydraulic drive system for construction machine | |
| JP7577896B2 (ja) | 建設機械 | |
| JP3363608B2 (ja) | 建設機械の操作システム | |
| US20180231118A1 (en) | Work machine | |
| JP2010048153A (ja) | エンジン制御装置 | |
| CN114207224B (zh) | 工程机械 | |
| JP6691482B2 (ja) | 作業車両および動作制御方法 | |
| JP7681417B2 (ja) | 建設機械 | |
| KR20210098530A (ko) | 작업 기계 | |
| KR102555745B1 (ko) | 작업 기계 | |
| JPH11324026A (ja) | 建設機械における操作子とアクチュエータ組合せ変更装置および作業モード変更装置 | |
| JP3965932B2 (ja) | 油圧ショベルの油圧制御回路 | |
| JP7328082B2 (ja) | 建設機械 | |
| CN114302995B (zh) | 工程机械 | |
| US12392111B2 (en) | Work machine | |
| JP7436301B2 (ja) | 建設機械 | |
| JP2802166B2 (ja) | 建設機械の油圧駆動装置 | |
| KR20010023391A (ko) | 작업 기계의 록크 방법 및 그 록크 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240216 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241015 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241023 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7577896 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |