JP7527469B2 - ロータ、電動機、送風機、空気調和装置およびロータの製造方法 - Google Patents
ロータ、電動機、送風機、空気調和装置およびロータの製造方法 Download PDFInfo
- Publication number
- JP7527469B2 JP7527469B2 JP2023505005A JP2023505005A JP7527469B2 JP 7527469 B2 JP7527469 B2 JP 7527469B2 JP 2023505005 A JP2023505005 A JP 2023505005A JP 2023505005 A JP2023505005 A JP 2023505005A JP 7527469 B2 JP7527469 B2 JP 7527469B2
- Authority
- JP
- Japan
- Prior art keywords
- rotor core
- rotor
- magnetic pole
- magnetic
- shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004519 manufacturing process Methods 0.000 title claims description 16
- 229920005989 resin Polymers 0.000 claims description 51
- 239000011347 resin Substances 0.000 claims description 51
- 238000003780 insertion Methods 0.000 claims description 26
- 230000037431 insertion Effects 0.000 claims description 26
- 238000000465 moulding Methods 0.000 claims description 15
- 238000000034 method Methods 0.000 claims description 5
- 230000004907 flux Effects 0.000 description 74
- 239000000758 substrate Substances 0.000 description 25
- 238000009826 distribution Methods 0.000 description 23
- 230000000052 comparative effect Effects 0.000 description 14
- 238000010586 diagram Methods 0.000 description 14
- 239000000463 material Substances 0.000 description 14
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical group [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 11
- 238000002788 crimping Methods 0.000 description 10
- 230000008859 change Effects 0.000 description 6
- 229910000831 Steel Inorganic materials 0.000 description 5
- 238000004378 air conditioning Methods 0.000 description 5
- 229910052742 iron Inorganic materials 0.000 description 5
- 239000003507 refrigerant Substances 0.000 description 5
- 239000010959 steel Substances 0.000 description 5
- 239000004734 Polyphenylene sulfide Substances 0.000 description 4
- 238000013459 approach Methods 0.000 description 4
- 230000004888 barrier function Effects 0.000 description 4
- 229920001707 polybutylene terephthalate Polymers 0.000 description 4
- 229920000069 polyphenylene sulfide Polymers 0.000 description 4
- 229910052761 rare earth metal Inorganic materials 0.000 description 4
- 150000002910 rare earth metals Chemical class 0.000 description 4
- 239000000853 adhesive Substances 0.000 description 3
- 230000001070 adhesive effect Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 229920000139 polyethylene terephthalate Polymers 0.000 description 3
- 239000005020 polyethylene terephthalate Substances 0.000 description 3
- 230000009467 reduction Effects 0.000 description 3
- 238000003466 welding Methods 0.000 description 3
- 229920000106 Liquid crystal polymer Polymers 0.000 description 2
- 239000004977 Liquid-crystal polymers (LCPs) Substances 0.000 description 2
- 229910052772 Samarium Inorganic materials 0.000 description 2
- 229910052782 aluminium Inorganic materials 0.000 description 2
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 2
- 239000012141 concentrate Substances 0.000 description 2
- 238000001816 cooling Methods 0.000 description 2
- WABPQHHGFIMREM-UHFFFAOYSA-N lead(0) Chemical compound [Pb] WABPQHHGFIMREM-UHFFFAOYSA-N 0.000 description 2
- 239000000696 magnetic material Substances 0.000 description 2
- 230000013011 mating Effects 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- -1 polybutylene terephthalate Polymers 0.000 description 2
- KZUNJOHGWZRPMI-UHFFFAOYSA-N samarium atom Chemical compound [Sm] KZUNJOHGWZRPMI-UHFFFAOYSA-N 0.000 description 2
- 229920001187 thermosetting polymer Polymers 0.000 description 2
- 239000002699 waste material Substances 0.000 description 2
- ZOXJGFHDIHLPTG-UHFFFAOYSA-N Boron Chemical compound [B] ZOXJGFHDIHLPTG-UHFFFAOYSA-N 0.000 description 1
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 229910052692 Dysprosium Inorganic materials 0.000 description 1
- 229910052779 Neodymium Inorganic materials 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 229910000963 austenitic stainless steel Inorganic materials 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 229910052796 boron Inorganic materials 0.000 description 1
- 229910017052 cobalt Inorganic materials 0.000 description 1
- 239000010941 cobalt Substances 0.000 description 1
- GUTLYIVDDKVIGB-UHFFFAOYSA-N cobalt atom Chemical compound [Co] GUTLYIVDDKVIGB-UHFFFAOYSA-N 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- KBQHZAAAGSGFKK-UHFFFAOYSA-N dysprosium atom Chemical compound [Dy] KBQHZAAAGSGFKK-UHFFFAOYSA-N 0.000 description 1
- 230000002708 enhancing effect Effects 0.000 description 1
- 239000003822 epoxy resin Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- QEFYFXOXNSNQGX-UHFFFAOYSA-N neodymium atom Chemical compound [Nd] QEFYFXOXNSNQGX-UHFFFAOYSA-N 0.000 description 1
- 229910001172 neodymium magnet Inorganic materials 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 229920003023 plastic Polymers 0.000 description 1
- 229920000647 polyepoxide Polymers 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000004080 punching Methods 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 229920005992 thermoplastic resin Polymers 0.000 description 1
- 229920006337 unsaturated polyester resin Polymers 0.000 description 1
- 238000009423 ventilation Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
- 229910000859 α-Fe Inorganic materials 0.000 description 1
Images




















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2706—Inner rotors
- H02K1/272—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis
- H02K1/274—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets
- H02K1/2746—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets the rotor consisting of magnets arranged with the same polarity, e.g. consequent pole type
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Permanent Field Magnets Of Synchronous Machinery (AREA)
- Iron Core Of Rotating Electric Machines (AREA)
Description
<電動機1の構成>
図1は、実施の形態1における電動機1を示す縦断面図である。電動機1は、例えば空気調和装置の送風機に用いられ、インバータで駆動される。また、電動機1は、ロータ2に永久磁石25が埋め込まれたIPM(磁石埋込型)モータである。
モールドステータ5は、上記の通り、ステータ5Aとモールド樹脂部56とを有する。ステータ5Aは、ロータ2を径方向外側から囲んでいる。ステータ5Aは、ステータコア50と、ステータコア50に設けられた絶縁部54と、絶縁部54を介してステータコア50に巻き付けられたコイル55とを有する。
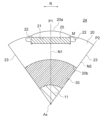
図3は、ロータ2を示す横断面図である。図4は、ロータ2の1磁極に相当する部分を拡大して示す横断面図である。図5は、ロータコア20を分割して示す図である。図6は、ロータ2を示す縦断面図である。
次に、ロータ2の製造方法について説明する。図7は、ロータ2の製造方法の各工程を示すフローチャートである。まず、ロータコア片24を形成する(ステップS101)。
次に、実施の形態1の作用について説明する。まず、実施の形態1と対比する比較例1,2について説明する。
以上説明したように、実施の形態1のロータ2は、永久磁石25で構成された第1の磁極P1と、ロータコア20において周方向に隣り合う第1の磁極P1の間に形成された第2の磁極P2とを有する。また、ロータコア20は、第2の磁極P2の周方向中心に形成された分割面23で、2以上のロータコア片24に分割されている。これにより、第2の磁極P2を通過する磁束の進行方向の変化が生じにくくなり、その結果、ロータ2の表面における磁束密度分布の偏りを抑制し、振動を抑制することができる。
次に、実施の形態2について説明する。図14(A)は、実施の形態2のロータ2Aを示す横断面図である。図14(B)は、実施の形態2のロータ2Aの1磁極に対応する領域を拡大して示す横断面図である。
次に、実施の形態3について説明する。図16(A)は、実施の形態3のロータ2Bを示す横断面図である。図16(B)は、実施の形態3のロータ2Bの1磁極に対応する領域を拡大して示す横断面図である。
次に、実施の形態4について説明する。図18(A)は、実施の形態4のロータ2Cを示す横断面図である。図18(B)は、実施の形態4のロータ2Cの1磁極に対応する領域を拡大して示す横断面図である。
次に、上述した各実施の形態の電動機が適用可能な空気調和装置について説明する。図21(A)は、実施の形態1の電動機1を適用した空気調和装置500の構成を示す図である。空気調和装置500は、室外機501と、室内機502と、これらを接続する冷媒配管503とを備える。
Claims (14)
- 軸線を中心とする周方向に延在し、磁石挿入孔を有するロータコアと、
前記ロータコアの前記磁石挿入孔に取り付けられ、それぞれ第1の磁極を構成する少なくとも2つの永久磁石と
を有し、
前記ロータコアにおいて前記周方向に隣り合う前記第1の磁極の間に位置する部分が、第2の磁極を構成し、
前記ロータコアは、前記第2の磁極の前記周方向の中心に形成された分割面で、少なくとも2つのロータコア片に分割され、
前記ロータコアは、前記第2の磁極に、前記軸線を中心とする径方向に延在する2以上のスリットからなるスリット部を有し、また、前記ロータコアの前記径方向における中心位置を通り且つ前記軸線を中心とする仮想円よりも内側にカシメ部を有し、
前記カシメ部は、前記スリット部の前記径方向の内側に形成されている
ロータ。 - 前記分割面は、前記ロータコアの内周から外周まで、前記径方向に延在している
請求項1に記載のロータ。 - 前記少なくとも2つのロータコア片はいずれも、前記分割面に係合部を有する
請求項1または2に記載のロータ。 - 前記係合部は、前記径方向における前記ロータコアの中心位置を通り且つ前記軸線を中心とする仮想円よりも内側に形成されている
請求項3に記載のロータ。 - 前記係合部は、凸部または凹部である
請求項3または4に記載のロータ。 - 前記カシメ部は、前記係合部の前記径方向の両側に形成されている
請求項3から5までのいずれか1項に記載のロータ。 - 前記カシメ部は、前記分割面の前記周方向の両側に形成されている
請求項1から6までの何れか1項に記載のロータ。 - 前記2以上のスリットは、前記分割面を中心として前記周方向に対称に形成されている
請求項1から7までのいずれか1項に記載のロータ。 - 前記軸線から前記ロータコアの外周までの距離は、前記第1の磁極および前記第2の磁極において最大であり、前記第1の磁極と前記第2の磁極との間の極間部で最小である
請求項1から8までの何れか1項に記載のロータ。 - 前記ロータコアの内周側に配置されたシャフトと、
前記ロータコアおよび前記シャフトを連結し、前記ロータコアの前記軸線の方向の端面を覆う樹脂部と
をさらに有し、
前記樹脂部は、前記磁石挿入孔の内部および前記2以上のスリットの内部に入り込んでいる
請求項1から9までの何れか1項に記載のロータ。 - 請求項1から10までの何れか1項に記載のロータと、
前記ロータを前記径方向の外側から囲むステータと
を備えた電動機。 - 請求項11に記載の電動機と、
前記電動機によって回転する羽根車と
を備えた送風機。 - 室外機と、室内機とを備え、
前記室外機と前記室内機の少なくとも一方は、
請求項12に記載の送風機を有する
空気調和装置。 - 成形金型内に、それぞれ永久磁石が取り付けられた少なくとも2つのロータコア片と、シャフトとを設置する工程であって、前記少なくとも2つのロータコア片が前記シャフトの軸線を中心とする周方向に並ぶように設置する工程と、
前記少なくとも2つのロータコア片と前記シャフトとを樹脂により一体に成形する工程と
を有し、
前記少なくとも2つのロータコア片はロータコアを構成し、
前記永久磁石が第1の磁極を構成し、前記ロータコアにおいて前記周方向に隣り合う前記第1の磁極の間に位置する部分が第2の磁極を構成し、
前記ロータコアは、前記第2の磁極に、前記軸線を中心とする径方向に延在する2以上のスリットからなるスリット部を有し、また、前記ロータコアの前記径方向における中心位置を通り且つ前記軸線を中心とする仮想円よりも内側にカシメ部を有し、
前記カシメ部は、前記スリット部の前記径方向の内側に形成されている
ロータの製造方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/009737 WO2022190308A1 (ja) | 2021-03-11 | 2021-03-11 | ロータ、電動機、送風機、空気調和装置およびロータの製造方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2022190308A1 JPWO2022190308A1 (ja) | 2022-09-15 |
| JPWO2022190308A5 JPWO2022190308A5 (ja) | 2023-09-21 |
| JP7527469B2 true JP7527469B2 (ja) | 2024-08-02 |
Family
ID=83226492
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023505005A Active JP7527469B2 (ja) | 2021-03-11 | 2021-03-11 | ロータ、電動機、送風機、空気調和装置およびロータの製造方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7527469B2 (ja) |
| WO (1) | WO2022190308A1 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014003815A (ja) | 2012-06-19 | 2014-01-09 | Toyota Motor Corp | 回転電機の回転子鉄心 |
| WO2017085814A1 (ja) | 2015-11-18 | 2017-05-26 | 三菱電機株式会社 | 電動機および空気調和機 |
| WO2019016893A1 (ja) | 2017-07-19 | 2019-01-24 | 三菱電機株式会社 | 回転電機 |
| WO2020003341A1 (ja) | 2018-06-25 | 2020-01-02 | 三菱電機株式会社 | ロータ、電動機、送風機および空気調和装置 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020010539A (ja) * | 2018-07-10 | 2020-01-16 | 株式会社ミツバ | ロータ、及びブラシレスモータ |
-
2021
- 2021-03-11 JP JP2023505005A patent/JP7527469B2/ja active Active
- 2021-03-11 WO PCT/JP2021/009737 patent/WO2022190308A1/ja active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014003815A (ja) | 2012-06-19 | 2014-01-09 | Toyota Motor Corp | 回転電機の回転子鉄心 |
| WO2017085814A1 (ja) | 2015-11-18 | 2017-05-26 | 三菱電機株式会社 | 電動機および空気調和機 |
| WO2019016893A1 (ja) | 2017-07-19 | 2019-01-24 | 三菱電機株式会社 | 回転電機 |
| WO2020003341A1 (ja) | 2018-06-25 | 2020-01-02 | 三菱電機株式会社 | ロータ、電動機、送風機および空気調和装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2022190308A1 (ja) | 2022-09-15 |
| JPWO2022190308A1 (ja) | 2022-09-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11394260B2 (en) | Rotor, motor, fan, and air conditioning apparatus | |
| US11101708B2 (en) | Rotor, motor, air conditioning apparatus, and manufacturing method of rotor | |
| JPWO2022019074A5 (ja) | ||
| US11852167B2 (en) | Motor and air conditioner using the same | |
| JP7090740B2 (ja) | 回転子、電動機、送風機、空気調和装置および回転子の製造方法 | |
| JP7042968B2 (ja) | 電動機、送風機、空気調和装置および電動機の製造方法 | |
| JP7486629B2 (ja) | 回転子、電動機、送風機、空気調和装置、及び回転子の製造方法 | |
| JP7527469B2 (ja) | ロータ、電動機、送風機、空気調和装置およびロータの製造方法 | |
| EP4113792A1 (en) | Stator, electric motor, blower, air conditioner, and stator manufacturing method | |
| WO2020213601A1 (ja) | モータ、送風機、空気調和装置およびモータの製造方法 | |
| EP4113789A1 (en) | Electric motor, blower, and air conditioner | |
| WO2021019592A1 (ja) | 電動機、送風機、空気調和装置および電動機の製造方法 | |
| WO2022259453A1 (ja) | 電動機、送風機および空気調和装置 | |
| JP7062089B2 (ja) | 回転子、電動機、送風機、空気調和装置および回転子の製造方法 | |
| JP7012878B2 (ja) | 回転子、電動機、送風機、空気調和装置および回転子の製造方法 | |
| JP7219331B2 (ja) | 電動機、送風機、空気調和装置および電動機の製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230627 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230627 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240227 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240411 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240625 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240723 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7527469 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |