JP7493741B2 - 物品把持装置 - Google Patents
物品把持装置 Download PDFInfo
- Publication number
- JP7493741B2 JP7493741B2 JP2019143734A JP2019143734A JP7493741B2 JP 7493741 B2 JP7493741 B2 JP 7493741B2 JP 2019143734 A JP2019143734 A JP 2019143734A JP 2019143734 A JP2019143734 A JP 2019143734A JP 7493741 B2 JP7493741 B2 JP 7493741B2
- Authority
- JP
- Japan
- Prior art keywords
- article
- gripping
- gripping member
- item
- gripper
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 claims description 81
- 230000009471 action Effects 0.000 claims description 34
- 239000007788 liquid Substances 0.000 claims description 15
- 238000004140 cleaning Methods 0.000 claims description 10
- 230000004048 modification Effects 0.000 description 21
- 238000012986 modification Methods 0.000 description 21
- 230000001133 acceleration Effects 0.000 description 20
- 238000000926 separation method Methods 0.000 description 7
- 238000010586 diagram Methods 0.000 description 6
- 238000012423 maintenance Methods 0.000 description 6
- 238000000034 method Methods 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 239000000126 substance Substances 0.000 description 4
- 239000012530 fluid Substances 0.000 description 3
- 235000013305 food Nutrition 0.000 description 3
- 238000007599 discharging Methods 0.000 description 2
- 230000015654 memory Effects 0.000 description 2
- 235000012149 noodles Nutrition 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 238000007664 blowing Methods 0.000 description 1
- 230000008094 contradictory effect Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 239000004615 ingredient Substances 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 235000015067 sauces Nutrition 0.000 description 1
- 238000007790 scraping Methods 0.000 description 1
- 230000032258 transport Effects 0.000 description 1
- 238000005303 weighing Methods 0.000 description 1
Images
























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1612—Programme controls characterised by the hand, wrist, grip control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/0045—Manipulators used in the food industry
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0052—Gripping heads and other end effectors multiple gripper units or multiple end effectors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/085—Force or torque sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/088—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices with position, velocity or acceleration sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0052—Gripping heads and other end effectors multiple gripper units or multiple end effectors
- B25J15/0057—Gripping heads and other end effectors multiple gripper units or multiple end effectors mounted on a turret
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/08—Gripping heads and other end effectors having finger members
- B25J15/10—Gripping heads and other end effectors having finger members with three or more finger members
- B25J15/103—Gripping heads and other end effectors having finger members with three or more finger members for gripping the object in three contact points
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0058—Means for cleaning manipulators, e.g. dust removing means
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Food Science & Technology (AREA)
- Manipulator (AREA)
Description
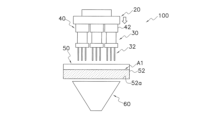
物品把持装置100の概要を、図1及び図2を参照しながら説明する。図1は、物品把持装置100の模式図である。図2は、物品把持装置100のブロック図である。
主に図1~図5を参照して物品把持装置100の詳細構成について説明する。図3は、ロボット10、可動部材20、重量取得部40及び把持器30の概略斜視図である。図4は、可動部材20、重量取得部40及び把持器30の概略斜視図である。図5Aは、把持器30が取り付けられた可動部材20を、把持器30の把持部材32側(下方)から見た底面図である。図5Bは、図5Aの把持器30の1つについて、その把持器30の把持部材32を下方から見た底面図であり、後述する遠隔位置に位置している把持部材32を描画している。図5Cは、図5Aの把持器30の1つについて、その把持器30の把持部材32を下方から見た底面図であり、後述する近接位置に位置している把持部材32を描画している。
可動部材20は、把持器30が取り付けられている部材である。本実施形態では、可動部材20には、複数の把持器30が取り付けられている。可動部材20は、把持器30を支持するフレームである。可動部材20は、ロボット10により移動させられる、可動の(移動可能な)部材である。
ロボット10は、可動部材20を支持し、可動部材20を移動させる装置である。本実施形態では、ロボット10は、可動部材20を単一軸に沿って移動させる。具体的には、ロボット10は、可動部材20を、鉛直方向に延びる単一軸に沿って上下に移動させる。
把持器30は、物品Aを把持する装置である。
物品把持装置100では、把持器30のそれぞれに対して、1台の重量取得部40が設けられる。重量取得部40は、対応する把持器30の把持部材32が把持している物品Aの重量値を取得する。
戴置部50には、物品群A1が戴置される。具体的には、戴置部50は、物品A(物品群A1)が収容されている物品群収容容器52を含む。戴置部50では、戴置面52a(ここでは、物品群収容容器52の底面)に物品群A1が戴置されている。把持器30は、物品群収容容器52に収容されている物品群A1から、物品Aの一部を把持する。本実施形態では、物品群収容容器52は、上方が開いた直方体状の容器である。本実施形態では、戴置部50は、物品群収容容器52の内部に収容される物品Aの量が減少すると、人又は機械が、内部の物品Aの量が減少した物品群収容容器52を、新たな(物品Aが多く収容されている)物品群収容容器52と交換可能に構成されている。なお、戴置部50は、物品群収容容器52が交換可能に構成される代わりに、物品群収容容器52に物品Aを供給するための物品供給機構を有してもよい。
排出シュート60は漏斗状の部材である。排出シュート60は、把持器30の直下に配置される。また、排出シュート60は、戴置部50が第1位置に位置する時、戴置部50の直下に配置される。言い換えれば、第1位置に位置する戴置部50は、把持器30と排出シュート60との間に配置される。一方で、戴置部50が第2位置に位置する時には、把持器30と排出シュート60との間には、戴置部50は配置されない。
制御部70は、図示を省略するCPUや、ROMやRAM等のメモリを有する。制御部70は、ロボット10、把持部材駆動機構34、重量取得部40、戴置部駆動部54と電気的に接続されている(図2参照)。制御部70は、CPUがメモリに記憶されているプログラムを実行することで、ロボット10、把持部材駆動機構34、戴置部駆動部54等の物品把持装置100の各種構成の動作の制御や、重量取得部40の取得した物品Aの重量値を利用した組合せ計算等を行う。なお、制御部70の各種機能は、ソフトウェアで実現されなくてもよく、ハードウェアで実現されても、ハードウェアとソフトウェアとが協働することで実現されてもよい。
制御部70による把持部材駆動機構34の制御について説明する。
以下では、説明の簡素化のため、図5Bに描画されている複数の把持部材32の位置を遠隔位置と呼び、図5Cに描画されている複数の把持部材32の位置を近接位置と呼ぶ。
第1の例の把持部材32の第2動作は、第1動作と同様に、図5Bのように互いに離れて遠隔位置に配置されている複数の把持部材32が、径方向内向きに動いて図5Cのような近接位置へと移動し、その後に再び遠隔位置に戻る一連の動作である。
把持部材32は、第2動作時には、第1動作時のように遠隔位置と近接位置との範囲を移動しなくてもよい。例えば、把持部材32は、第2動作時には、第1動作時より狭い範囲で移動してもよい。例えば、第2動作時の把持部材32の移動量は、第1動作時の把持部材32の移動量の3/4以下(さらに好ましくは1/2以下)に設定される。また、限定するものではないが、例えば、第2動作時の把持部材32の移動量は、第1動作時の把持部材32の移動量の1/8以上に設定される。
制御部70により制御される物品把持装置100の動作について、図6A~図6K及び図7を参照しながら説明する。図6A~図6Kは、図1の物品把持装置100の動作を説明するための物品把持装置100の主要部分の概略側面図である。図6A~図6Kでは、可動部材20を移動させるロボット10の描画は省略している。図7は、物品把持装置100の動作を説明するためのフローチャートである。
(3-1)
本実施形態の物品把持装置100は、把持部材32に物品Aを把持させ、その後に把持部材32に物品Aの把持を解除させることで物品Aを排出する装置である。物品把持装置100は、駆動機構の一例としての把持部材駆動機構34と、制御部70と、を備える。把持部材駆動機構34は、把持部材32を駆動する。制御部70は、把持部材駆動機構34を制御する。制御部70は、把持部材駆動機構34の制御モードとして、第1制御モードと、第1制御モードとは別の第2制御モードと、を有する。第1制御モードでは、制御部70は、把持部材駆動機構34を制御して、把持部材32に物品Aを把持させ、その後に物品Aの把持を解除させる第1動作を実行させる。第2制御モードでは、制御部70は、把持部材駆動機構34を制御して、把持部材32に、把持部材32に付着した付着物を除去する第2動作を実行させる。
本実施形態の物品把持装置100は、重量取得部40を備える。重量取得部40は、把持部材32が把持している物品Aの重量値を取得する。
本実施形態の物品把持装置100では、第2動作は、第1動作と異なる動作である。
本実施形態の物品把持装置100では、好ましくは、第2動作時の把持部材32の平均動作速度は、第1動作時の把持部材32の平均動作速度に比べて大きい。より具体的には、把持部材32の第2動作時の接近時速度及び/又は離反時速度は、第1動作時の接近時速度及び/又は離反時速度に比べて大きい。
本実施形態の物品把持装置100では、制御部70は、第1動作において把持部材32に物品Aの把持を解除させた直後に、第2制御モードで把持部材駆動機構34を制御する。
本実施形態の物品把持装置100では、制御部70は、第1動作において把持部材32に物品Aを把持させる前に、第2制御モードで把持部材駆動機構34を制御する。
本実施形態の物品把持装置100では、制御部70は、第2制御モードによる把持部材駆動機構34の制御を定期的に実行する。本実施形態では、制御部70は、第1動作において把持部材32が物品Aの把持を解除するたびに、第2制御モードによる把持部材駆動機構34の制御を実行する。
以下に上記実施形態の変形例を示す。なお、各変形例の内容の一部又は全部は、互いに矛盾しない範囲で上記実施形態の内容や他の変形例の内容と組み合わされてもよい。
上記実施形態における把持器30の種類は、一例に過ぎず、種々の種類の把持器を本開示の把持器として適用可能である。例えば、把持器は、一対の把持部材を互いに近づくように平行移動させることで、物品Aを把持するものであってもよい。
上記実施形態では、把持部材32が物品Aの把持を解除した直後に、把持部材32が第2動作を行うが、把持部材32が第2動作を行うタイミングは、物品Aの把持の解除直後に限定されるものではない。
上記実施形態や変形例Bでは、制御部70は、第1動作において把持部材32が物品Aの把持を解除するたびに、第2制御モードによる把持部材駆動機構34の制御を実行する。ただし、これに限定されるものではない。
上記実施形態では、戴置部駆動部54が、戴置部50を第1位置と第2位置との間で移動させる。ただし、このような態様に限定されるものではなく、戴置部50は不動であってもよい。
上記実施形態では、物品把持装置100は、可動部材20に取り付けられた複数の把持器30の把持部材32の動作を制御し、物品群A1の物品Aの一部を把持器30のそれぞれに把持させて、各把持器30が把持する物品Aの重量値を重量取得部40で取得する。そして、制御部70は、重量取得部40の取得した把持器30のそれぞれが把持する物品Aの重量値に基づいて組合せ計算を行う。
上記実施形態では、ロボット10は、可動部材20を単一軸に沿って移動させている。しかし、このような態様に限定されるものではなく、ロボット10は、可動部材20を複数方向に移動させてもよい。例えば、ロボット10は、可動部材20を図6Bに描画された位置から図6Cに描画された位置へと上方に移動させる際に、把持部材32に付着した物品Aをふるい落とすように、可動部材20を鉛直方向と直交する水平方向に往復動させてもよい。
物品把持装置は、図11に描画されている物品把持装置300のように、上記実施形態の物品把持装置100の構成に加え、洗浄用の液体Wを貯留している貯留容器80を有してもよい。液体Wは、限定されるものではないが、例えば水である。物品把持装置300では、把持部材32の第2動作が、図11のように、把持部材32の少なくとも一部が貯留容器80内の液体Wに入れられた状態で実行される。
1)物品把持装置300は、貯留容器80及び貯留容器80を駆動する貯留容器駆動部82(図12参照)を有する。
2)物品把持装置300の制御部270(図12参照)により制御される物品把持装置300の動作が、物品把持装置100の動作と一部異なる。
上記実施形態では、把持部材32の実行する第2動作の内容が毎回同じであるが、これに限定されるものではない。物品把持装置100は、把持部材32の実行する第2動作が変化するように構成されてもよい。
上記実施形態では、物品把持装置100が有する可動部材20及びロボット10はそれぞれ1台であるが、これに限定されるものではない。物品把持装置100は、把持器30が取り付けられている可動部材20及び可動部材20を移動させるロボット10を複数有してもよい。
物品把持装置100は、把持部材32に付着した付着物を除去するための付着物除去機構を有していてもよい。例えば、物品把持装置100は、付着物除去機構として、把持部材32にエアを吹き付けるエア吹付機構を有してもよい。また、物品把持装置100は、付着物除去機構として、把持部材32に接触する接触部材と、接触部材を動かして把持部材32に付着した付着物を掻き落とす駆動部と、を有する掻き落とし機構を有してもよい。把持部材32の第2動作に加え、物品把持装置100がこれらの付着物除去機構を有することで、把持部材32に付着した付着物の除去が促進されやすい。
上記実施形態では、把持器30が取り付けられている可動部材20が移動させられることで、把持器30の把持部材32が、戴置部50に戴置されている物品群A1の物品Aを把持可能な位置に移動させられる。ただし、これに限定されるものではなく、把持器30は不動のフレームに固定されてもよい。そして、戴置部50が上下方向にも移動可能に構成され、把持器30が移動する代わりに、戴置部50が把持器30の把持部材32が物品Aを把持可能な位置に移動してもよい。
以上で説明した物品把持装置は、物品把持装置の具体例に過ぎず、本開示の技術的範囲を限定するものではない。上記の実施形態には、本開示の趣旨及び範囲から逸脱すること無く、種々の変形が可能なことが理解されるであろう。
34 把持部材駆動機構(駆動機構)
40 重量取得部
70 制御部
80 貯留容器
100,200,300 物品把持装置
A 物品
W 液体
Claims (8)
- 把持部材に物品を把持させ、その後に前記把持部材に前記物品の把持を解除させることで前記物品を排出する物品把持装置であって、
前記把持部材を駆動する駆動機構と、
前記駆動機構を制御する制御部と、
を備え、
前記制御部は、前記駆動機構の制御モードとして、
前記駆動機構を制御して、前記把持部材を閉状態とすることで前記物品を把持させ、その後に前記把持部材を開状態とすることで前記物品の把持を解除させる第1動作を実行させる第1制御モードと、
前記駆動機構を制御して、前記第1動作後に、前記把持部材に、前記物品を把持させることなく、前記開状態と前記閉状態とを交互に連続的に複数回繰り返させることで、前記把持部材に付着した付着物を除去する第2動作を実行させる、前記第1制御モードとは別の第2制御モードと、
を有する、
物品把持装置。 - 前記把持部材が把持している前記物品の重量値を取得する重量取得部、を更に備える、
請求項1に記載の物品把持装置。 - 前記第2動作時の前記把持部材の平均動作速度は、前記第1動作時の前記把持部材の平均動作速度に比べて大きい、
請求項1又は2に記載の物品把持装置。 - 前記制御部は、前記第1動作において前記把持部材に前記物品の把持を解除させた直後に、前記第2制御モードで前記駆動機構を制御する、
請求項1から3のいずれか1項に記載の物品把持装置。 - 前記制御部は、前記第1動作において前記把持部材に前記物品を把持させる前に、前記第2制御モードで前記駆動機構を制御する、
請求項1から3のいずれか1項に記載の物品把持装置。 - 前記制御部は、前記第2制御モードによる前記駆動機構の制御を定期的に実行する、
請求項1から5のいずれか1項に記載の物品把持装置。 - 洗浄用の液体が貯留されている貯留容器を更に備え、
前記把持部材の前記第2動作は、前記把持部材の少なくとも一部が前記貯留容器内の前記液体に入れられた状態で実行される、
請求項1から6のいずれか1項に記載の物品把持装置。 - 把持部材に物品を把持させ、その後に前記把持部材に前記物品の把持を解除させることで前記物品を排出する物品把持装置であって、
前記把持部材を駆動する駆動機構と、
前記駆動機構を制御する制御部と、
を備え、
前記制御部は、前記駆動機構の制御モードとして、
前記駆動機構を制御して、前記把持部材を閉状態とすることで前記物品を把持させ、その後に前記把持部材を開状態とすることで前記物品の把持を解除させる第1動作を実行させる第1制御モードと、
前記駆動機構を制御して、前記把持部材に、前記開状態と前記閉状態とを交互に複数回繰り返させることで、前記把持部材に付着した付着物を除去する第2動作を実行させる、前記第1制御モードとは別の第2制御モードと、
を有し、
前記第2動作時の前記把持部材の平均動作速度は、前記第1動作時の前記把持部材の平均動作速度に比べて大きい、
物品把持装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019143734A JP7493741B2 (ja) | 2019-08-05 | 2019-08-05 | 物品把持装置 |
| CN202010729828.6A CN112318532B (zh) | 2019-08-05 | 2020-07-27 | 物品把持装置 |
| US16/944,090 US11331795B2 (en) | 2019-08-05 | 2020-07-30 | Article gripping device |
| EP20189109.0A EP3772397A1 (en) | 2019-08-05 | 2020-08-03 | Article gripping device with cleaning mechanism |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019143734A JP7493741B2 (ja) | 2019-08-05 | 2019-08-05 | 物品把持装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2021024026A JP2021024026A (ja) | 2021-02-22 |
| JP2021024026A5 JP2021024026A5 (ja) | 2022-07-28 |
| JP7493741B2 true JP7493741B2 (ja) | 2024-06-03 |
Family
ID=71943955
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019143734A Active JP7493741B2 (ja) | 2019-08-05 | 2019-08-05 | 物品把持装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11331795B2 (ja) |
| EP (1) | EP3772397A1 (ja) |
| JP (1) | JP7493741B2 (ja) |
| CN (1) | CN112318532B (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6945246B2 (ja) * | 2020-03-19 | 2021-10-06 | 株式会社イシダ | 物品把持システム |
| JP2023137649A (ja) * | 2022-03-18 | 2023-09-29 | TechMagic株式会社 | 食品取分け装置およびプログラム |
| JP7364284B1 (ja) | 2022-09-29 | 2023-10-18 | コネクテッドロボティクス株式会社 | 把持システム、及び制御装置 |
| JP7364282B1 (ja) | 2022-09-29 | 2023-10-18 | コネクテッドロボティクス株式会社 | 把持システム、及び制御装置 |
| JP7364283B1 (ja) | 2022-09-29 | 2023-10-18 | コネクテッドロボティクス株式会社 | 把持システム、及び制御装置 |
| JP7553156B1 (ja) | 2023-11-06 | 2024-09-18 | コネクテッドロボティクス株式会社 | 保持システム、及び制御装置 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007125674A (ja) | 2005-11-07 | 2007-05-24 | Nisca Corp | マイクロマニピュレータ |
| WO2011152520A1 (ja) | 2010-06-03 | 2011-12-08 | レオン自動機株式会社 | ロボットハンドおよび食品搬送システム |
| JP2011251828A (ja) | 2010-06-03 | 2011-12-15 | Rheon Automatic Machinerty Co Ltd | 食品搬送システム |
| JP2013136107A (ja) | 2011-12-28 | 2013-07-11 | Seiko Epson Corp | ロボットハンド、ロボット及びロボットハンドの制御方法 |
| JP2017052055A (ja) | 2015-09-10 | 2017-03-16 | 富士機械製造株式会社 | ワーク搬送装置および工作機械 |
| JP2019025646A (ja) | 2017-07-25 | 2019-02-21 | 株式会社ケー・デー・イー | 分配装置、盛付システム及び学習データ生成装置 |
| JP2019058967A (ja) | 2017-09-25 | 2019-04-18 | 学校法人慶應義塾 | 食品移載システム及び食品把持装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5733991A (en) * | 1980-08-06 | 1982-02-24 | Fujitsu Fanuc Ltd | Robot hand with chip removing device |
| DK0559923T3 (da) * | 1992-03-07 | 1995-12-27 | Frisco Findus Ag | Veje- og fyldeapparat |
| US7083208B2 (en) * | 2003-01-21 | 2006-08-01 | Embrex, Inc. | Vacuum assisted egg lifting apparatus having venturi assembly |
| US8162366B1 (en) * | 2010-03-26 | 2012-04-24 | Western Digital Technologies, Inc. | Systems and methods for gripping a component |
| CN105983877B (zh) * | 2015-05-27 | 2017-12-05 | 中日龙(襄阳)机电技术开发有限公司 | 全自动吹液吹屑工件清洁机 |
| MY195942A (en) * | 2016-08-25 | 2023-02-27 | Boehringer Ingelheim Animal Health Usa Inc | Egg Candling And Relocation Apparatus for use with in Ovo Injection Machines |
| JP6831723B2 (ja) | 2017-03-16 | 2021-02-17 | 川崎重工業株式会社 | ロボットとロボットの運転方法 |
| CN208166090U (zh) * | 2018-03-28 | 2018-11-30 | 邛崃驰阳农牧科技有限公司 | 一种降低原料包装袋内残留物的装置 |
| CN108515515A (zh) * | 2018-05-18 | 2018-09-11 | 山东博锐机器人科技有限公司 | 伸缩型复合机械臂 |
| CN208231828U (zh) * | 2018-05-21 | 2018-12-14 | 昆山科皓机器人有限公司 | 一种侧姿抓手 |
-
2019
- 2019-08-05 JP JP2019143734A patent/JP7493741B2/ja active Active
-
2020
- 2020-07-27 CN CN202010729828.6A patent/CN112318532B/zh active Active
- 2020-07-30 US US16/944,090 patent/US11331795B2/en active Active
- 2020-08-03 EP EP20189109.0A patent/EP3772397A1/en active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007125674A (ja) | 2005-11-07 | 2007-05-24 | Nisca Corp | マイクロマニピュレータ |
| WO2011152520A1 (ja) | 2010-06-03 | 2011-12-08 | レオン自動機株式会社 | ロボットハンドおよび食品搬送システム |
| JP2011251828A (ja) | 2010-06-03 | 2011-12-15 | Rheon Automatic Machinerty Co Ltd | 食品搬送システム |
| JP2013136107A (ja) | 2011-12-28 | 2013-07-11 | Seiko Epson Corp | ロボットハンド、ロボット及びロボットハンドの制御方法 |
| JP2017052055A (ja) | 2015-09-10 | 2017-03-16 | 富士機械製造株式会社 | ワーク搬送装置および工作機械 |
| JP2019025646A (ja) | 2017-07-25 | 2019-02-21 | 株式会社ケー・デー・イー | 分配装置、盛付システム及び学習データ生成装置 |
| JP2019058967A (ja) | 2017-09-25 | 2019-04-18 | 学校法人慶應義塾 | 食品移載システム及び食品把持装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3772397A1 (en) | 2021-02-10 |
| JP2021024026A (ja) | 2021-02-22 |
| US20210039252A1 (en) | 2021-02-11 |
| US11331795B2 (en) | 2022-05-17 |
| CN112318532B (zh) | 2024-04-12 |
| CN112318532A (zh) | 2021-02-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7493741B2 (ja) | 物品把持装置 | |
| JP2024097886A (ja) | 制御装置、制御プログラムおよび計量システム | |
| CN112297001B (zh) | 物品移动系统 | |
| CN112109100B (zh) | 物品排出系统 | |
| CA2976868A1 (en) | Stripping of a dip-moulded glove from a former | |
| EP3537115A1 (en) | Weighing system and weighing method | |
| JP2021051045A5 (ja) | ||
| JP7432231B2 (ja) | 物品排出システム | |
| JP7312497B2 (ja) | 物品排出システム | |
| JP7481735B2 (ja) | 物品把持装置 | |
| JP2023038771A (ja) | 計量システム | |
| JP2024027507A (ja) | 計量装置 | |
| JP2023137647A (ja) | 食品取分け装置およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220720 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220720 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230425 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230426 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230622 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230926 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231117 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20240206 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240319 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20240404 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240514 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240515 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7493741 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |