JP7435530B2 - 鋼帯の溶接部検出方法、鋼帯の製造方法、鋼帯の溶接部検出装置及び鋼帯の製造設備 - Google Patents
鋼帯の溶接部検出方法、鋼帯の製造方法、鋼帯の溶接部検出装置及び鋼帯の製造設備 Download PDFInfo
- Publication number
- JP7435530B2 JP7435530B2 JP2021066031A JP2021066031A JP7435530B2 JP 7435530 B2 JP7435530 B2 JP 7435530B2 JP 2021066031 A JP2021066031 A JP 2021066031A JP 2021066031 A JP2021066031 A JP 2021066031A JP 7435530 B2 JP7435530 B2 JP 7435530B2
- Authority
- JP
- Japan
- Prior art keywords
- steel strip
- magnetic flux
- detection
- flux density
- detection device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 title claims description 260
- 229910000831 Steel Inorganic materials 0.000 title claims description 213
- 239000010959 steel Substances 0.000 title claims description 213
- 238000004519 manufacturing process Methods 0.000 title claims description 21
- 230000004907 flux Effects 0.000 claims description 94
- 230000008859 change Effects 0.000 claims description 57
- 238000003466 welding Methods 0.000 claims description 40
- 238000000034 method Methods 0.000 claims description 30
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical group [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 claims description 9
- 230000008569 process Effects 0.000 claims description 8
- 230000001629 suppression Effects 0.000 claims description 5
- 230000005284 excitation Effects 0.000 description 14
- 238000005097 cold rolling Methods 0.000 description 12
- 230000007547 defect Effects 0.000 description 10
- 239000010960 cold rolled steel Substances 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 238000005096 rolling process Methods 0.000 description 3
- 238000011144 upstream manufacturing Methods 0.000 description 3
- 238000007796 conventional method Methods 0.000 description 2
- 238000005520 cutting process Methods 0.000 description 2
- 238000004804 winding Methods 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 238000005098 hot rolling Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000005482 strain hardening Methods 0.000 description 1
- 239000002344 surface layer Substances 0.000 description 1
Images



Landscapes
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Metal Rolling (AREA)
Description
即ち、特許文献1に示す鋼板穴検出装置の穴精度検出方法の場合、先行鋼帯と後行鋼帯の溶接部に形成された穴を鋼板トラッッキング用の穴として用いているが、穴によるトラッキングは、投光・受光型が多く、投光器の光量不足や受光器の汚れによる穴検出不良が多く発生し、溶接部のトラッキングができない場合があった。
一方、特許文献2に示す電縫鋼管中継ぎ溶接部の検出方法の場合には、溶接部を検出しそのトラッキングを行うため、トラッキング用の穴を鋼帯に形成する際の不都合はない。
そして、各溶接部検出装置20の電圧印加装置21を構成する励磁コイル21a、磁束密度変化検出装置22を構成する第1検出コイル22a及び第2検出コイル22cと鋼帯Sの表面との間隔(リフトオフ)は、5~100mmに設定されることが好ましい。
これにより、溶接部Wに行うノッチング加工を正確に検出された鋼帯Sの溶接部Wの幅方向端部に行うことができる。
2 ペイオフリール
3 ピンチロール
4 溶接機
5 ノッチング装置
6 ブライドルロール
7 入側ルーパ
8 パスラインロール(振動抑制装置)
9 タンデム圧延機
10 ピンチロール(振動抑制装置)
11 切断機
12 巻取機
20 溶接部検出装置
20a E型鉄心
21 電圧印加装置
21a 励磁コイル
21b 電圧印加部
22 磁束密度変化検出装置
22a 第1検出コイル
22b 第1電圧検出部
22c 第2検出コイル
22d 第2電圧検出部
22e 電圧差算出部
23 溶接部検出部
24 高周波磁束
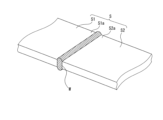
S 鋼帯
S1 先行鋼帯
S1a 尾端部
S2 後行鋼帯
S2a 先端部
W 溶接部
Claims (11)
- 先行鋼帯と後行鋼帯とを溶接してなる鋼帯の溶接部を検出する鋼帯の溶接部検出方法であって、
搬送中における搬送方向に対する垂直方向への前記鋼帯の振動幅を20mm以下に抑制するとともに、高周波電圧を印加することにより発生する高周波磁束を前記鋼帯に作用させることにより、前記鋼帯に生ずる磁束密度変化に基づいて前記溶接部を検出するものであり、
前記鋼帯に生ずる磁束密度変化は、E型鉄心の搬送方向入側鉄心部に巻かれた第1検出コイルと、E型鉄心の搬送方向出側鉄心部に巻かれた第2検出コイルとを備えた磁束密度変化検出装置を用いて、前記磁束密度変化検出装置が前記第1検出コイルに流れる電流の電圧と前記第2検出コイルに流れる電流の電圧との電圧差を検出することで検出され、
前記溶接部は、検出対象箇所が前記第1検出コイルの下を通過した時の前記磁束密度変化検出装置で検出された電圧差と、検出対象箇所が前記第2検出コイルの下を通過した時の前記磁束密度変化検出装置で検出された電圧差との差が、所定の閾値を超える場合に、溶接部検出部が前記検出対象箇所が溶接部であると特定することで検出されることを特徴とする鋼帯の溶接部検出方法。 - 前記溶接部の幅方向に沿う複数個所に高周波磁束を作用させ、各高周波磁束により前記鋼帯の各箇所に生ずる磁束密度変化に基づいて前記溶接部を検出することを特徴とする請求項1に記載の鋼帯の溶接部検出方法。
- 前記鋼帯の各箇所に生ずる磁束密度変化の全てが所定の閾値を超える場合に、検出対象箇所が前記溶接部であると特定することを特徴とする請求項2に記載の鋼帯の溶接部検出方法。
- 請求項1乃至3のうちのいずれか一項に記載の鋼帯の溶接部検出方法を実行する溶接部検出工程を含むことを特徴とする鋼帯の製造方法。
- 前記溶接部検出工程で検出した鋼帯の溶接部の幅方向端部にノッチング加工を施すノッチング工程を含むことを特徴とする請求項4に記載の鋼帯の製造方法。
- 先行鋼帯と後行鋼帯とを溶接してなる鋼帯の溶接部を検出する鋼帯の溶接部検出装置であって、
搬送中における搬送方向に対する垂直方向への前記鋼帯の振動幅を抑制する振動抑制装置と、
高周波電圧を印加することにより発生する高周波磁束を前記鋼帯に作用させる電圧印加装置と、
該電圧印加装置によって前記鋼帯に高周波磁束を作用させることにより、前記鋼帯に生ずる磁束密度変化を検出する磁束密度変化検出装置と、
該磁束密度変化検出装置で検出された磁束密度変化に基づいて前記溶接部を検出する溶接部検出部とを備え、
前記磁束密度変化検出装置は、E型鉄心の搬送方向入側鉄心部に巻かれた第1検出コイルと、E型鉄心の搬送方向出側鉄心部に巻かれた第2検出コイルとを備え、前記鋼帯に生ずる磁束密度変化を検出するものとして、前記第1検出コイルに流れる電流の電圧と前記第2検出コイルに流れる電流の電圧との電圧差を検出し、
前記溶接部検出部は、検出対象箇所が前記第1検出コイルの下を通過した時の前記磁束密度変化検出装置で検出された電圧差と、検出対象箇所が前記第2検出コイルの下を通過した時の前記磁束密度変化検出装置で検出された電圧差との差が、所定の閾値を超える場合に、前記検出対象箇所が溶接部であると特定することを特徴とする鋼帯の溶接部検出装置。 - 前記電圧印加装置及び前記磁束密度変化検出装置は、前記鋼帯を挟んで前記振動抑制装置に対向して配置されることを特徴とする請求項6に記載の鋼帯の溶接部検出装置。
- 前記電圧印加装置及び前記磁束密度変化検出装置は、前記溶接部の一方面及び他方面のそれぞれに対向して少なくとも1対以上設置されることを特徴とする請求項6に記載の鋼帯の溶接部検出装置。
- 前記電圧印加装置及び前記磁束密度変化検出装置は、前記溶接部の幅方向に沿って複数併設されることを特徴とする請求項6乃至8のうちいずれか一項に記載の鋼帯の溶接部検出装置。
- 請求項6乃至9のうちのいずれか一項に記載の鋼帯の溶接部検出装置を備えていることを特徴とする鋼帯の製造設備。
- 前記鋼帯の溶接部検出装置で検出した鋼帯の溶接部の幅方向端部にノッチング加工を施すノッチング装置を備えていることを特徴とする請求項10に記載の鋼帯の製造設備。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021066031A JP7435530B2 (ja) | 2021-04-08 | 2021-04-08 | 鋼帯の溶接部検出方法、鋼帯の製造方法、鋼帯の溶接部検出装置及び鋼帯の製造設備 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021066031A JP7435530B2 (ja) | 2021-04-08 | 2021-04-08 | 鋼帯の溶接部検出方法、鋼帯の製造方法、鋼帯の溶接部検出装置及び鋼帯の製造設備 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022161315A JP2022161315A (ja) | 2022-10-21 |
| JP7435530B2 true JP7435530B2 (ja) | 2024-02-21 |
Family
ID=83658912
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021066031A Active JP7435530B2 (ja) | 2021-04-08 | 2021-04-08 | 鋼帯の溶接部検出方法、鋼帯の製造方法、鋼帯の溶接部検出装置及び鋼帯の製造設備 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7435530B2 (ja) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006068759A (ja) | 2004-08-31 | 2006-03-16 | Jfe Steel Kk | 電縫鋼管中継ぎ溶接部の検出方法 |
| JP2008139233A (ja) | 2006-12-05 | 2008-06-19 | Sumitomo Kinzoku Technol Kk | スポット溶接モニタリング装置及び方法 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0666815U (ja) * | 1993-02-05 | 1994-09-20 | 住友金属工業株式会社 | ストリップ溶接部の検出装置 |
| JP3106336B2 (ja) * | 1993-10-20 | 2000-11-06 | 日本鋼管株式会社 | 金属帯の溶接部位置検出装置 |
-
2021
- 2021-04-08 JP JP2021066031A patent/JP7435530B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006068759A (ja) | 2004-08-31 | 2006-03-16 | Jfe Steel Kk | 電縫鋼管中継ぎ溶接部の検出方法 |
| JP2008139233A (ja) | 2006-12-05 | 2008-06-19 | Sumitomo Kinzoku Technol Kk | スポット溶接モニタリング装置及び方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022161315A (ja) | 2022-10-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3106336B2 (ja) | 金属帯の溶接部位置検出装置 | |
| JP2006218505A (ja) | マーキング付き金属帯 | |
| JP7435530B2 (ja) | 鋼帯の溶接部検出方法、鋼帯の製造方法、鋼帯の溶接部検出装置及び鋼帯の製造設備 | |
| JP2007245215A (ja) | 冷間連続圧延設備 | |
| JP2003236613A (ja) | 冷延または鍍金鋼帯製造用鋼帯の製造方法及び鍍金鋼帯の製造方法 | |
| JP2006241578A (ja) | 金属帯の製造方法及び金属帯処理プロセスライン | |
| JP4289074B2 (ja) | 鋼帯の製造方法 | |
| KR101647079B1 (ko) | 용접부 오검출 방지 장치 | |
| JP3358537B2 (ja) | 連続ラインにおける欠陥対応の自動減速方法及び装置 | |
| JP2000033421A (ja) | 走行ストリップの接合点の検出方法 | |
| JP2010025835A (ja) | 鋼帯の合否判定方法 | |
| JP6032223B2 (ja) | コイル巻き形状合否判定方法および装置 | |
| JPH08174064A (ja) | 圧延ラインにおけるサイドガイド制御方法 | |
| JP2006068759A (ja) | 電縫鋼管中継ぎ溶接部の検出方法 | |
| JP7425286B2 (ja) | 鋼帯の連続焼鈍設備 | |
| US20190076896A1 (en) | Hot-rolled steel sheet and method for manufacturing same | |
| JPS6230824A (ja) | 帯鋼等の連続処理工程における溶接個所検出方法 | |
| JP2012170960A (ja) | 鋼帯の巻きずれ防止方法 | |
| JP2006205201A (ja) | 圧延方法 | |
| JP2008073751A (ja) | 金属板の形状測定方法、製造方法及び金属板の形状測定装置 | |
| JP2000292413A (ja) | 溶接欠陥の検出装置および電縫加工装置 | |
| JP2005195526A (ja) | 漏洩磁束による欠陥検出方法および鋼板の欠陥を検出するライン | |
| JPH067845A (ja) | 連続熱間圧延における溶接接合部の検出方法 | |
| JP2000084695A (ja) | 帯状鋼板の長手方向の連続溶接方法およびその溶接設備 | |
| JPS623803A (ja) | 鋼帯の溶接部処理方法及びその装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20221124 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230929 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231003 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231108 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240109 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240122 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7435530 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |