JP7424924B2 - 磁気吸着車輪及び車両 - Google Patents
磁気吸着車輪及び車両 Download PDFInfo
- Publication number
- JP7424924B2 JP7424924B2 JP2020109947A JP2020109947A JP7424924B2 JP 7424924 B2 JP7424924 B2 JP 7424924B2 JP 2020109947 A JP2020109947 A JP 2020109947A JP 2020109947 A JP2020109947 A JP 2020109947A JP 7424924 B2 JP7424924 B2 JP 7424924B2
- Authority
- JP
- Japan
- Prior art keywords
- wheel
- shaft
- permanent magnet
- spherical
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000005291 magnetic effect Effects 0.000 title claims description 127
- 238000001179 sorption measurement Methods 0.000 title claims description 38
- 230000005540 biological transmission Effects 0.000 claims description 16
- 230000002093 peripheral effect Effects 0.000 claims description 11
- 238000010586 diagram Methods 0.000 description 9
- 238000003825 pressing Methods 0.000 description 8
- 229910000831 Steel Inorganic materials 0.000 description 3
- 238000005096 rolling process Methods 0.000 description 3
- 239000010959 steel Substances 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 2
- 229910052782 aluminium Inorganic materials 0.000 description 2
- 238000005520 cutting process Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 229910001172 neodymium magnet Inorganic materials 0.000 description 2
- 238000010422 painting Methods 0.000 description 2
- 230000035515 penetration Effects 0.000 description 2
- 238000003466 welding Methods 0.000 description 2
- 239000003302 ferromagnetic material Substances 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 239000000314 lubricant Substances 0.000 description 1
- 239000000696 magnetic material Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 239000004576 sand Substances 0.000 description 1
- 238000011179 visual inspection Methods 0.000 description 1
Images








Landscapes
- Motorcycle And Bicycle Frame (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Description
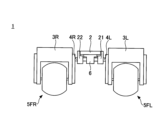
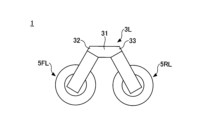
本実施形態に係る車両1について、図1から図3を用いて説明する。図1は、本実施形態に係る車両1の斜視図である。図2は、本実施形態に係る車両1の正面図である。図3は、本実施形態に係る車両1の側面図である。なお、以下の説明において、車両1の進退方向を車両1の前後方向、車両1の車幅方向を車両1の左右方向、前後方向及び左右方向と垂直な方向を車両1の上下方向として、説明する。
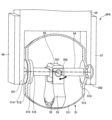
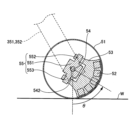
次に、車両1が備える磁気吸着車輪5(5FL,5FR,5RL,5RR)について、図4から図8を用いてさらに説明する。ここで、車両1が備える4つの磁気吸着車輪5FL,5FR,5RL,5RRは、同様の構成を有している。このため、以下の説明では、磁気吸着車輪5FRを例に説明し、磁気吸着車輪5FL,5RL,5RRについての説明を省略する。
次に、車両1が床面から壁面に移動する際の車両1の動作について、図10及び図11を用いて説明する。図10は、車両1が床面W1から壁面W2に移動する際の動作を示すフローチャートである。図11は、各時点における車両1の状態を示す模式図である。なお、図11は、車両1を水平方向から見た図である。
次に、車両1が壁面から他の壁面に移動する際の車両1の動作について、図12及び図13を用いて説明する。図12は、車両1が第1壁面W3から第2壁面W4に移動する際の動作を示すフローチャートである。図13は、各時点における車両1の状態を示す模式図である。なお、図13は、車両1を鉛直方向から見た図である。
2 ボディ
21 軸受
22 軸受
3L,3R ロッカーリンク
351,352 支持部
4L,4R シャフト
5,5FL,5FR,5RL,5RR 磁気吸着車輪
6 ディファレンシャルギア(回転機構)
351 支持部
351a 貫通部
51 球殻車輪
52 永久磁石
53 永久磁石保持部
54 第1シャフト
55 第2シャフト
56 車輪駆動部
561 出力軸
57 磁石駆動部
571 出力軸
572 カプラ
58~60 ベアリング
71 車輪駆動用モータ
72 動力伝達部
73 第1プーリ
74 第2プーリ
75 タイミングベルト
76~78 ベアリング
81 磁石駆動用モータ
82 動力伝達部
83 第1プーリ
84 第2プーリ
85 タイミングベルト
86~88 ベアリング
Claims (5)
- 磁気吸着面に接触する外周面が球面形状をを有する球殻車輪と、
前記球殻車輪の内側に配置され、永久磁石を保持する永久磁石保持部と、
前記球殻車輪の回転軸と同軸に配置され、前記球殻車輪とは独立して回転し、前記永久磁石保持部を第1回転方向に回転可能な第1シャフトと、
前記第1シャフトとともに前記第1回転方向に回転し、前記第1シャフトの軸と直交する軸を有して該軸に揺動可能に前記永久磁石保持部を懸架する第2シャフトと、
前記球殻車輪を回転駆動する車輪駆動部と、
前記第1シャフトを回転駆動することで前記永久磁石を回転させる磁石駆動部と、を備え、
前記車輪駆動部は、車輪駆動用モータと、前記車輪駆動用モータの回転動力を前記球殻車輪に伝達する第1動力伝達部と、を有し、
前記磁石駆動部は、磁石駆動用モータと、前記磁石駆動用モータの回転動力を前記球殻車輪に伝達する第2動力伝達部と、を有する、磁気吸着車輪。 - 前記車輪駆動用モータ及び/又は前記磁石駆動用モータは、前記球殻車輪の回転軸とは異なる位置に配置される、
請求項1に記載の磁気吸着車輪。 - 前記第1動力伝達部及び/または第2動力伝達部は、ベルトプーリ機構を有する、
請求項1または請求項2に記載の磁気吸着車輪。 - 前方及び後方に請求項1乃至請求項3のいずれか1項に記載の磁気吸着車輪を設ける一対の部材と、
前記一対の部材を独立して回転可能に接続する回転機構と、
前記回転機構と固定されるボディと、を備える車両。 - 該車両が床面を走行する際、前記床面と接する前記磁気吸着車輪の前記永久磁石保持部は、前記第1回転方向において、前記ボディの方向を向く、
請求項4に記載の車両。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020109947A JP7424924B2 (ja) | 2020-06-25 | 2020-06-25 | 磁気吸着車輪及び車両 |
| JP2024005978A JP7669628B2 (ja) | 2020-06-25 | 2024-01-18 | 磁気吸着車輪の制御方法、車両の制御方法、磁気吸着車輪及び車両 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020109947A JP7424924B2 (ja) | 2020-06-25 | 2020-06-25 | 磁気吸着車輪及び車両 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024005978A Division JP7669628B2 (ja) | 2020-06-25 | 2024-01-18 | 磁気吸着車輪の制御方法、車両の制御方法、磁気吸着車輪及び車両 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022007174A JP2022007174A (ja) | 2022-01-13 |
| JP7424924B2 true JP7424924B2 (ja) | 2024-01-30 |
Family
ID=80111102
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020109947A Active JP7424924B2 (ja) | 2020-06-25 | 2020-06-25 | 磁気吸着車輪及び車両 |
| JP2024005978A Active JP7669628B2 (ja) | 2020-06-25 | 2024-01-18 | 磁気吸着車輪の制御方法、車両の制御方法、磁気吸着車輪及び車両 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024005978A Active JP7669628B2 (ja) | 2020-06-25 | 2024-01-18 | 磁気吸着車輪の制御方法、車両の制御方法、磁気吸着車輪及び車両 |
Country Status (1)
| Country | Link |
|---|---|
| JP (2) | JP7424924B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4497665A4 (en) | 2022-03-23 | 2025-07-09 | Sumitomo Heavy Industries | VEHICLE CROSSING A WALL |
| CN115157920A (zh) * | 2022-06-23 | 2022-10-11 | 江苏镌极特种设备有限公司 | 一种磁铁随动车轮及爬壁机器人 |
| JPWO2024219070A1 (ja) * | 2023-04-19 | 2024-10-24 | ||
| CN121464080A (zh) * | 2023-08-08 | 2026-02-03 | 住友重机械工业株式会社 | 移动装置、移动装置的控制方法及控制程序 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000052702A (ja) | 1998-08-11 | 2000-02-22 | Gijutsu Kaihatsu Kenkyusho:Kk | 走行駆動機構を内蔵した磁性体走行用吸着車輪 |
| JP2010202154A (ja) | 2009-03-06 | 2010-09-16 | Hakusan Kogyo Kk | 球形車輪装置 |
| US20160325794A1 (en) | 2015-03-09 | 2016-11-10 | Alstom Technology Ltd | Magnetic roller |
| CN109484507A (zh) | 2018-12-29 | 2019-03-19 | 衡昇科技有限公司 | 用于复杂导磁壁面的定向吸附永磁磁轮双轮爬壁机器人 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5220869A (en) * | 1991-08-07 | 1993-06-22 | Osaka Gas Company, Ltd. | Vehicle adapted to freely travel three-dimensionally and up vertical walls by magnetic force and wheel for the vehicle |
| JP2639895B2 (ja) * | 1994-05-31 | 1997-08-13 | 本州四国連絡橋公団 | 磁石内蔵タイプの吸着車輪並びに同吸着車輪を使用した壁面移動ゴンドラ |
| JPH0911893A (ja) * | 1995-06-30 | 1997-01-14 | Osaka Gas Co Ltd | 管内走行ロボット |
| JP3076546B2 (ja) * | 1997-12-27 | 2000-08-14 | 川崎重工業株式会社 | 磁気吸着走行装置 |
| CH701817A1 (de) * | 2009-08-31 | 2011-03-15 | Alstom Technology Ltd | Rollelement zum allseitigen Verfahren eines Fahrzeugs sowie Fahrzeug mit einem solchen Rollelement. |
| CH702282A1 (de) * | 2009-11-27 | 2011-05-31 | Alstom Technology Ltd | Fahrzeug zur selbständigen Inspektion von schwer zugänglichen Innenräumen. |
| CN110435352A (zh) * | 2019-09-17 | 2019-11-12 | 衡昇科技有限公司 | 一种越障磁轮 |
-
2020
- 2020-06-25 JP JP2020109947A patent/JP7424924B2/ja active Active
-
2024
- 2024-01-18 JP JP2024005978A patent/JP7669628B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000052702A (ja) | 1998-08-11 | 2000-02-22 | Gijutsu Kaihatsu Kenkyusho:Kk | 走行駆動機構を内蔵した磁性体走行用吸着車輪 |
| JP2010202154A (ja) | 2009-03-06 | 2010-09-16 | Hakusan Kogyo Kk | 球形車輪装置 |
| US20160325794A1 (en) | 2015-03-09 | 2016-11-10 | Alstom Technology Ltd | Magnetic roller |
| CN109484507A (zh) | 2018-12-29 | 2019-03-19 | 衡昇科技有限公司 | 用于复杂导磁壁面的定向吸附永磁磁轮双轮爬壁机器人 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2024026849A (ja) | 2024-02-28 |
| JP2022007174A (ja) | 2022-01-13 |
| JP7669628B2 (ja) | 2025-04-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7424924B2 (ja) | 磁気吸着車輪及び車両 | |
| JP5292283B2 (ja) | 全方向駆動装置及びそれを用いた全方向移動車 | |
| JP6079997B2 (ja) | 磁気吸着車両の群移動体 | |
| KR20230016641A (ko) | 적응성 자석 휠들을 가진 벽 등반 차량 | |
| JP7487023B2 (ja) | 磁気吸着車輪及び車両 | |
| JP5396398B2 (ja) | 摩擦式駆動装置及びそれを用いた全方向移動体 | |
| JP7591459B2 (ja) | 走行車 | |
| JP6578063B2 (ja) | 無人搬送車の牽引装置およびこれを備える無人搬送車 | |
| WO2010064408A1 (ja) | 車輪及びそれを用いた摩擦式駆動装置及び全方向移動体 | |
| EP2003044B1 (en) | Automotive inspection vehicle | |
| CN102346482A (zh) | 一种原地转向的轮式机器人底座机构 | |
| JP2019166863A (ja) | 移動体 | |
| JP7487022B2 (ja) | 磁気吸着車輪及び車両 | |
| JP3498043B2 (ja) | 球状駆動輪を用いる全方向移動装置 | |
| JP3498044B2 (ja) | 全方向移動装置の制御装置 | |
| KR100937752B1 (ko) | 자주식 강관용접 로봇장치 | |
| KR102597420B1 (ko) | 모듈형 듀얼 스위블 휠 및 이를 포함하는 플랫폼 | |
| JP6641655B2 (ja) | 走行ロボット | |
| WO2019176094A1 (ja) | 電動車両 | |
| JP2023044065A (ja) | 移動体 | |
| KR20230106866A (ko) | 용접 개선부의 녹제거 장치 | |
| KR102622794B1 (ko) | 주행구체 | |
| CN107128377A (zh) | 一种球形机器人 | |
| EP0876871A1 (en) | Welding vehicle | |
| JP2019006290A (ja) | 管内走行装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A80 | Written request to apply exceptions to lack of novelty of invention |
Free format text: JAPANESE INTERMEDIATE CODE: A80 Effective date: 20200707 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230413 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20231124 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20231219 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240118 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7424924 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |