JP7410150B2 - 自律作業機、自律作業機の制御方法及びプログラム - Google Patents
自律作業機、自律作業機の制御方法及びプログラム Download PDFInfo
- Publication number
- JP7410150B2 JP7410150B2 JP2021534463A JP2021534463A JP7410150B2 JP 7410150 B2 JP7410150 B2 JP 7410150B2 JP 2021534463 A JP2021534463 A JP 2021534463A JP 2021534463 A JP2021534463 A JP 2021534463A JP 7410150 B2 JP7410150 B2 JP 7410150B2
- Authority
- JP
- Japan
- Prior art keywords
- marker
- markers
- autonomous
- information
- adjacent
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 76
- 239000003550 marker Substances 0.000 claims description 288
- 238000004891 communication Methods 0.000 claims description 17
- 238000001514 detection method Methods 0.000 claims description 16
- 230000007246 mechanism Effects 0.000 claims description 7
- 230000008569 process Effects 0.000 description 21
- 238000012545 processing Methods 0.000 description 19
- 238000010586 diagram Methods 0.000 description 16
- 230000005484 gravity Effects 0.000 description 8
- 230000009471 action Effects 0.000 description 5
- 230000001133 acceleration Effects 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 238000013519 translation Methods 0.000 description 4
- 238000013459 approach Methods 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 239000003086 colorant Substances 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 239000003795 chemical substances by application Substances 0.000 description 1
- 238000010801 machine learning Methods 0.000 description 1
- 230000005389 magnetism Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
Images
















Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0214—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory in accordance with safety or protection criteria, e.g. avoiding hazardous areas
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0234—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using optical markers or beacons
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
- G05D1/0251—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means extracting 3D information from a plurality of images taken from different locations, e.g. stereo vision
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0276—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle
- G05D1/0278—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle using satellite positioning signals, e.g. GPS
Description
作業エリア内で作業する自律作業機であって、
前記作業エリアを規定するために配置された複数のマーカを検出する検出手段と、
前記検出手段により検出された前記複数のマーカの中から2つのマーカを隣接マーカとして特定する隣接マーカ特定手段と、
前記検出手段の検出結果に基づいてマーカ情報を特定する特定手段と、
前記特定手段により特定された前記マーカ情報に基づいて、前記複数のマーカのうち、前記隣接マーカ特定手段により前記隣接マーカとして特定された前記2つのマーカ間を結ぶ仮想ラインを設定する設定手段と、
前記設定手段により設定された前記仮想ラインよりも奥の領域へ前記自律作業機が逸脱しないように前記自律作業機を制御する制御手段と、
を備え、
各マーカは、隣接するマーカが存在する方向を指示する指標を備えており、
前記隣接マーカ特定手段は、第1のマーカの前記指標が指示する方向に存在する第2のマーカを前記隣接マーカとして特定することを特徴とする。
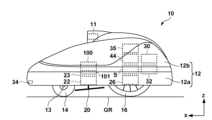
図1は、本発明の一実施形態に係る自律走行可能な自律作業機の外観図である。以下では側面視における自律作業機の進行方向(車長方向)と、進行方向に直交する横方向(車幅方向)と、進行方向と横方向に直交する鉛直方向とを、それぞれ前後方向、左右方向、上下方向と定義し、それに従って各部の構成を説明する。
図1において、符号10は自律作業機(以下「作業車」という)を示す。作業車10は、具体的には自律走行する芝刈機として機能する。但し、芝刈機は一例であり、他の種類の作業機械にも本発明を適用することができる。作業車10は、複数のカメラ(第1のカメラ11a、第2のカメラ11b)を含むカメラユニット11を備えており、視差ある第1のカメラ11a、第2のカメラ11bにより撮影された画像を用いて、前方に存在する物体と、作業車10との距離情報を算出して取得する。そして、撮影された画像と、予め保持されている物体認識モデルとに基づいて、作業車10の動作を制御する。
図4Aを参照して、本実施形態に係る仮想ラインの設定方法を説明する。仮想ラインとは、作業エリアを規定するために配置されたマーカ間を結ぶ仮想的な線である。図4Aにおいて、400は、作業車10が作業を行う作業エリア(例えば庭)を含む領域(例えばユーザの所有する敷地全体)を示す。401a~401nは本実施形態に係るマーカである。これらのマーカ401a~401nにより囲まれるエリアが作業エリアとなる。作業車10は、仮想ラインよりも奥の領域に逸脱しないように制御を行うことで、この作業エリアから逸脱しないように作業を行う。なお、地面に埋め込むタイプの既存のエリアワイヤを用いて敷地全体を区画し、敷地の一部にマーカを配置して非侵入のエリアを設けることにより、作業エリアを規定してもよい。すなわち、既存のエリアワイヤとマーカとを組み合わせて作業エリアを規定する場合にも本発明を適用することができる。
2つのマーカが隣接するマーカであるかどうかは、マーカを所定距離間隔で配置することを前提とした場合、マーカ間の距離に基づいて判定することができる。マーカ間の距離が所定距離範囲(例えば2.5m~3.5m)内であれば、隣接するマーカであると判定し、所定距離範囲外である場合には隣接するマーカではないと判定してもよい。図4Aにおいて、ライン414の長さ(例えば4m)は所定距離範囲外であるので、仮想ラインとして設定されることはない。これにより、マーカ401b、マーカ401c、マーカ401dを結ぶ三角形の領域で作業が行われないことを防止することができる。
なお、2つのマーカが隣接するマーカであるかどうかを判定する方法はマーカ間の距離を用いる方法に限定されるものではない。例えば、図4Aのマーカ401mのように、隣接するマーカが存在する方向を指示するための指標(例えば431、432)を備えたマーカを用いることで、各指標を検出し、指標431、432が指し示す方向に存在する近傍のマーカを隣接するマーカであると判定してもよい。図示の例では、指標431により指示される方向に存在するマーカ401lとマーカ401mとの間に仮想ライン421を設定し、マーカ401nとマーカ401nとの間に仮想ライン422を設定する。この場合、各マーカが401mと同様に少なくとも2つの方向を示す指標を備えて構成されてもよい。
判定方法1の場合、3つのマーカが所定距離(例えば3m)間隔で正三角形状に配置されていたり、或いは、4つのマーカが所定距離(例えば3m)間隔で正方形状に配置されているような場合には、正三角形、正方形の内部の領域に進入することができず、それらの領域内で作業を行うことができなくなってしまう可能性がある。
図4Cは、隣接マーカの判定方法の一例の説明図である。460は、作業車10が作業を行う作業エリア(例えば庭)を含む領域(例えばユーザの所有する敷地全体)を示す。461a~461mは本実施形態に係るマーカである。これらのマーカ461a~461mにより囲まれるエリアが作業エリアとなる。作業車10はこの作業エリアから逸脱しないように作業を行う。
図4Dは、ユーザが所持する通信端末上に表示された作業エリアに関する地図への書き込み例を示す図である。470は、ユーザの通信端末であり、例えばタブレットやスマートフォンなどである。471は、ユーザの手である。472は、通信端末470の表示画面上に表示された作業エリアに関する地図情報である。図示の例では、ユーザの自宅及び庭を含む敷地を上空から俯瞰して見た地図が表示されている。473はユーザの自宅の屋根であり、474は、ユーザの自宅の敷地内にある樹木スペースである。ここで、図4Eは、図4Dの地図情報に対応するユーザの自宅を含む敷地の一部の外観図である。
図4Fに、2種類のマーカを使用する方法の例を示す。作業エリアの境界上に配置される各マーカと、作業エリアから除外されるアイランドとなる樹木スペース474の周囲に配置される各マーカとで、異なる種類(例えば異なる色、異なる形状など)のマーカを使用する。これにより、作業車10は、撮影画像から抽出されるマーカの特徴から異なる種類のマーカを判別することが可能となり、作業車10は、撮影画像から、マーカ483とマーカ484とは隣接するマーカではないと判定することができる。
図4Gは、入り組んだ形状の領域に、短い間隔でマーカを配置する例を示す図である。491a~491eは、それぞれ第1の距離(例えば3m)間隔用のマーカである。492a~492fは、それぞれ第2の距離(例えば1m)間隔用のマーカである。第1の距離間隔用の第1の種類のマーカと、第2の距離間隔用の第2の種類のマーカとは、例えば色、形状、大きさなどが異なっている異なる種類のマーカである。
続いて、図5A及び図5Bのフローチャートを参照しながら、本実施形態に係る作業車10が実施する処理の手順を説明する。本実施形態に係る作業車10は、マーカ間に仮想ラインを設定し、その仮想ラインよりも奥の領域へ作業車10が逸脱しないように制御を行う。
AD:BE=CD:CE
⇔OAsinα:OBsinβ=OC-OAcosα:OBcosβ-OC
⇔OC=OAOB×(sinαcosβ+cosαsinβ)/(OBsinβ+OAsinα)
=OAOBsin(α+β)/(OBsinβ+OAsinα)
=X
として地点Cまでの距離Xを求めることができる。
なお、充電ステーション300へ帰還する必要が生じた場合や、どこか所定の位置へ移動する必要が生じた場合には、CPU44aは、作業車10の走行経路を設定し、設定した走行経路に従って走行する。その際、走行経路上に仮想ラインが存在しないように走行経路を設定する。これにより、仮想ラインよりも奥に逸脱して走行することを防止することができる。
実施形態1では、マーカ情報として、検出されたマーカまでの距離情報を取得し、当該距離情報を使用して作業車から仮想ラインまでの距離や作業車が仮想ラインに到達するまでの時間を算出して回避動作を行う例を説明した。これに対して、実施形態2では、マーカ情報として、マーカの位置座標を示すマーカ位置情報を取得し、当該マーカ位置情報と、作業車の自己位置情報及び方位情報とを使用して作業車から仮想ラインまでの距離や作業車が仮想ラインに到達するまでの時間を算出して回避動作を行う例を説明する。
続いて、図8A及び図8Bのフローチャートを参照しながら、本実施形態に係る作業車10が実施する処理の手順を説明する。本実施形態に係る作業車10は、マーカ間に仮想ラインを設定し、その仮想ラインよりも奥の領域へ作業車10が逸脱しないように制御を行う。図5A及び図5Bのフローチャートと同じ処理を行うステップについては同一の参照符号を付してある。以下、図5A及び図5Bとの差異を中心に説明を行う。
実施形態3では、作業エリアを規定するために配置されたマーカの位置情報を含む地図情報を作成し、ユーザへ提示する例を説明する。
1.上記実施形態の自律作業機(例えば10)は、
作業エリア内で作業する自律作業機であって、
前記作業エリアを規定するために配置された複数のマーカ(例えば401a~401n)を検出する検出手段(例えば11、44a)と、
前記検出手段の検出結果に基づいてマーカ情報を特定する特定手段(例えば44a)と、
前記特定手段により特定された前記マーカ情報に基づいて前記複数のマーカを結ぶ仮想ライン(例えば411、412、413)を設定する設定手段(例えば44a)と、
前記設定手段により設定された前記仮想ラインよりも奥の領域へ前記自律作業機が逸脱しないように前記自律作業機を制御する制御手段(例えば44a)と、
を備える。
前記制御手段は、前記自律作業機が前記仮想ラインに到達するまでに要する時間を算出し、前記算出された前記時間に基づいて前記自律作業機を制御する。
前記制御手段は、前記自律作業機の速度と、前記自律作業機から前記仮想ラインまでの距離とに基づいて前記時間を算出する。
前記自律作業機の移動距離を計測する計測手段(例えばIMU、オドメトリ)をさらに備え、
前記制御手段は、
前記マーカ情報に基づいて前記自律作業機から前記仮想ラインまでの距離を算出し、
当該算出された距離と、当該距離が算出された前記自律作業機の位置からの前記移動距離とに基づいて、前記自律作業機を制御する。
前記マーカ情報は、前記自律作業機からマーカまでの距離を示す距離情報を含み、
前記設定手段は、前記距離情報に基づいて前記仮想ラインを設定する。
前記マーカ情報は、マーカの位置座標を示すマーカ位置情報を含み、
前記設定手段は、前記マーカ位置情報に基づいて前記仮想ラインを設定する。
マーカの特徴情報を格納する格納手段(例えば44c)をさらに備え、
前記特定手段は、前記格納手段に格納されたマーカの前記特徴情報と、前記検出手段により検出されたマーカの特徴とに基づいて、前記マーカ情報を特定する。
前記制御手段は、前記自律作業機から前記仮想ラインまでの距離が第1の閾値以下となった場合、前記自律作業機を停止、後退、又は旋回させる。
前記制御手段は、前記自律作業機から前記仮想ラインまでの距離が前記第1の閾値よりも大きい第2の閾値以下となった場合、前記仮想ラインへ向かう前記自律作業機を減速させる。
前記検出手段により検出された前記複数のマーカの中から2つのマーカを隣接マーカとして特定する隣接マーカ特定手段(例えば44a)をさらに備え、
前記制御手段は、前記隣接マーカ特定手段により前記隣接マーカとして特定された前記2つのマーカ間に仮想ラインを設定する。
前記隣接マーカ特定手段は、前記複数のマーカのうち、マーカ間の距離が所定距離範囲内である2つのマーカを前記隣接マーカとして特定する。
前記隣接マーカ特定手段は、前記2つのマーカ(例えば、451b、451d)を結ぶラインよりも奥の領域に、前記検出手段により検出された他のマーカ(例えば451c)が存在する場合、前記2つのマーカは前記隣接マーカではないと特定する。
各マーカは、隣接するマーカが存在する方向を指示する指標(例えば431、432)を備えており、
前記隣接マーカ特定手段は、第1のマーカ(例えば401m)の前記指標が指示する方向に存在する第2のマーカ(例えば431又は432)を前記隣接マーカとして特定する。
配置された各マーカに沿って前記自律作業機を走行させることにより前記自律作業機の軌跡情報(例えば図4Cの矢印に沿った軌跡)を取得する取得手段をさらに備え、
前記隣接マーカ特定手段は、前記複数のマーカのうち、前記軌跡情報と整合する2つのマーカを前記隣接マーカとして特定する。
前記作業エリアを含む地図上で指定された前記作業エリアの境界情報(例えば475、476)を取得する取得手段をさらに備え、
前記隣接マーカ特定手段は、前記複数のマーカのうち、前記境界情報と整合する2つのマーカを前記隣接マーカとして特定する。
前記境界情報は、前記作業エリアの境界に配置された複数のマーカの配置情報(例えば476)、又は、前記作業エリアの境界を示す境界線の情報(例えば475)である。
前記複数のマーカは、前記作業エリアの外縁を規定する複数の第1の種類のマーカ(例えば483)と、前記外縁の内部に含まれ且つ前記作業エリアから除外される内部領域を規定する複数の第2の種類のマーカ(例えば484)とを含み、
前記隣接マーカ特定手段は、前記第1の種類のマーカと、前記第2の種類のマーカとを前記隣接マーカではないとして特定する。
前記複数のマーカは、第1の距離間隔で配置される複数の第1の種類のマーカ(例えば491a~491e)と、前記第1の距離間隔よりも短い第2の距離間隔で配置される複数の第2の種類のマーカ(例えば492a~492f)とを含み、
前記隣接マーカ特定手段は、前記複数の第1の種類のマーカのうち、2つの第1の種類のマーカの間に前記第2の種類のマーカが存在する場合には、前記2つの第1の種類のマーカを前記隣接マーカとして特定する。
前記自律作業機の走行経路を設定する経路設定手段をさらに備え、
前記経路設定手段は、前記走行経路上に前記仮想ラインが存在しないように前記走行経路を設定する。
前記走行経路は、ステーションまで帰還するための走行経路である。
前記自律作業機の現在位置を特定する位置特定手段(例えば48)をさらに備え、
前記制御手段は、前記仮想ラインの情報と、前記位置特定手段により特定された前記自律作業機の前記現在位置とに基づいて、前記自律作業機を制御する。
前記制御手段は、前記マーカ位置情報(例えば901a~901w)と前記仮想ラインの情報との少なくとも一方を、前記作業エリアの地図情報(例えば900)へ反映させる。
前記制御手段は、前記マーカ位置情報と前記仮想ラインの情報との少なくとも一方が反映された前記地図情報をユーザへ提示する。
前記制御手段は、前記マーカ位置情報と前記仮想ラインの情報との少なくとも一方が反映された前記地図情報をユーザの通信端末(例えば470)へ送信する。
作業エリア内で作業する自律作業機の制御方法であって、
前記作業エリアを規定するために配置された複数のマーカを検出する検出工程と、
前記検出工程での検出結果に基づいてマーカ情報を特定する特定工程と、
前記特定工程で特定された前記マーカ情報に基づいて前記複数のマーカを結ぶ仮想ラインを設定する設定工程と、
前記設定工程で設定された前記仮想ラインよりも奥の領域へ前記自律作業機が逸脱しないように前記自律作業機を制御する制御工程と、
を有する。
コンピュータを、上記実施形態の自律作業機として機能させるためのプログラムである。
Claims (25)
- 作業エリア内で作業する自律作業機であって、
前記作業エリアを規定するために配置された複数のマーカを検出する検出手段と、
前記検出手段により検出された前記複数のマーカの中から2つのマーカを隣接マーカとして特定する隣接マーカ特定手段と、
前記検出手段の検出結果に基づいてマーカ情報を特定する特定手段と、
前記特定手段により特定された前記マーカ情報に基づいて、前記複数のマーカのうち、前記隣接マーカ特定手段により前記隣接マーカとして特定された前記2つのマーカ間を結ぶ仮想ラインを設定する設定手段と、
前記設定手段により設定された前記仮想ラインよりも奥の領域へ前記自律作業機が逸脱しないように前記自律作業機を制御する制御手段と、
を備え、
各マーカは、隣接するマーカが存在する方向を指示する指標を備えており、
前記隣接マーカ特定手段は、第1のマーカの前記指標が指示する方向に存在する第2のマーカを前記隣接マーカとして特定することを特徴とする自律作業機。 - 前記制御手段は、前記自律作業機が前記仮想ラインに到達するまでに要する時間を算出し、前記算出された前記時間に基づいて前記自律作業機を制御することを特徴とする請求項1に記載の自律作業機。
- 前記制御手段は、前記自律作業機の速度と、前記自律作業機から前記仮想ラインまでの距離とに基づいて前記時間を算出することを特徴とする請求項2に記載の自律作業機。
- 前記自律作業機の移動距離を計測する計測手段をさらに備え、
前記制御手段は、
前記マーカ情報に基づいて前記自律作業機から前記仮想ラインまでの距離を算出し、
当該算出された距離と、当該距離が算出された前記自律作業機の位置からの前記移動距離とに基づいて、前記自律作業機を制御することを特徴とする請求項1に記載の自律作業機。 - 前記マーカ情報は、前記自律作業機からマーカまでの距離を示す距離情報を含み、
前記設定手段は、前記距離情報に基づいて前記仮想ラインを設定することを特徴とする請求項1乃至4の何れか1項に記載の自律作業機。 - 前記マーカ情報は、マーカの位置座標を示すマーカ位置情報を含み、
前記設定手段は、前記マーカ位置情報に基づいて前記仮想ラインを設定することを特徴とする請求項1乃至4の何れか1項に記載の自律作業機。 - マーカの特徴情報を格納する格納手段をさらに備え、
前記特定手段は、前記格納手段に格納されたマーカの前記特徴情報と、前記検出手段により検出されたマーカの特徴とに基づいて、前記マーカ情報を特定することを特徴とする請求項1乃至6の何れか1項に記載の自律作業機。 - 前記制御手段は、前記自律作業機から前記仮想ラインまでの距離が第1の閾値以下となった場合、前記自律作業機を停止、後退、又は旋回させることを特徴とする請求項1乃至7の何れか1項に記載の自律作業機。
- 前記制御手段は、前記自律作業機から前記仮想ラインまでの距離が前記第1の閾値よりも大きい第2の閾値以下となった場合、前記仮想ラインへ向かう前記自律作業機を減速させることを特徴とする請求項8に記載の自律作業機。
- 前記隣接マーカ特定手段は、前記複数のマーカのうち、マーカ間の距離が所定距離範囲内である2つのマーカを前記隣接マーカとして特定することを特徴とする請求項1乃至9の何れか1項に記載の自律作業機。
- 前記隣接マーカ特定手段は、前記2つのマーカを結ぶラインよりも奥の領域に、前記検出手段により検出された他のマーカが存在する場合、前記2つのマーカは前記隣接マーカではないと特定することを特徴とする請求項1乃至10の何れか1項に記載の自律作業機。
- 配置された各マーカに沿って前記自律作業機を走行させることにより前記自律作業機の軌跡情報を取得する取得手段をさらに備え、
前記隣接マーカ特定手段は、前記複数のマーカのうち、前記軌跡情報と整合する2つのマーカを前記隣接マーカとして特定することを特徴とする請求項1乃至11の何れか1項に記載の自律作業機。 - 前記作業エリアを含む地図上で指定された前記作業エリアの境界情報を取得する取得手段をさらに備え、
前記隣接マーカ特定手段は、前記複数のマーカのうち、前記境界情報と整合する2つのマーカを前記隣接マーカとして特定することを特徴とする請求項1乃至12の何れか1項に記載の自律作業機。 - 前記境界情報は、前記作業エリアの境界に配置された複数のマーカの配置情報、又は、前記作業エリアの境界を示す境界線の情報であることを特徴とする請求項13に記載の自律作業機。
- 前記複数のマーカは、前記作業エリアの外縁を規定する複数の第1の種類のマーカと、前記外縁の内部に含まれ且つ前記作業エリアから除外される内部領域を規定する複数の第2の種類のマーカとを含み、
前記隣接マーカ特定手段は、前記第1の種類のマーカと、前記第2の種類のマーカとを前記隣接マーカではないとして特定することを特徴とする請求項1乃至14の何れか1項に記載の自律作業機。 - 前記複数のマーカは、第1の距離間隔で配置される複数の第1の種類のマーカと、前記第1の距離間隔よりも短い第2の距離間隔で配置される複数の第2の種類のマーカとを含み、
前記隣接マーカ特定手段は、前記複数の第1の種類のマーカのうち、2つの第1の種類のマーカの間に前記第2の種類のマーカが存在する場合には、前記2つの第1の種類のマーカを前記隣接マーカとして特定することを特徴とする請求項1乃至15の何れか1項に記載の自律作業機。 - 前記自律作業機の走行経路を設定する経路設定手段をさらに備え、
前記経路設定手段は、前記走行経路上に前記仮想ラインが存在しないように前記走行経路を設定することを特徴とする請求項1乃至16の何れか1項に記載の自律作業機。 - 前記走行経路は、ステーションまで帰還するための走行経路であることを特徴とする請求項17に記載の自律作業機。
- 前記自律作業機の現在位置を特定する位置特定手段をさらに備え、
前記制御手段は、前記仮想ラインの情報と、前記位置特定手段により特定された前記自律作業機の前記現在位置とに基づいて、前記自律作業機を制御することを特徴とする請求項1乃至18の何れか1項に記載の自律作業機。 - 前記制御手段は、前記マーカ位置情報と前記仮想ラインの情報との少なくとも一方を、前記作業エリアの地図情報へ反映させることを特徴とする請求項6に記載の自律作業機。
- 前記制御手段は、前記マーカ位置情報と前記仮想ラインの情報との少なくとも一方が反映された前記地図情報をユーザへ提示することを特徴とする請求項20に記載の自律作業機。
- 前記制御手段は、前記マーカ位置情報と前記仮想ラインの情報との少なくとも一方が反映された前記地図情報をユーザの通信端末へ送信することを特徴とする請求項20に記載の自律作業機。
- 前記指標が指示する向きは、回転機構を用いてユーザが自在に変更可能であることを特徴とする請求項1乃至22の何れか1項に記載の自律作業機。
- 作業エリア内で作業する自律作業機の制御方法であって、
前記作業エリアを規定するために配置された複数のマーカを検出する検出工程と、
前記検出工程で検出された前記複数のマーカの中から2つのマーカを隣接マーカとして特定する隣接マーカ特定工程と、
前記検出工程での検出結果に基づいてマーカ情報を特定する特定工程と、
前記特定工程で特定された前記マーカ情報に基づいて、前記複数のマーカのうち、前記隣接マーカ特定工程で前記隣接マーカとして特定された前記2つのマーカ間を結ぶ仮想ラインを設定する設定工程と、
前記設定工程で設定された前記仮想ラインよりも奥の領域へ前記自律作業機が逸脱しないように前記自律作業機を制御する制御工程と、
を有し、
各マーカは、隣接するマーカが存在する方向を指示する指標を備えており、
前記隣接マーカ特定工程では、第1のマーカの前記指標が指示する方向に存在する第2のマーカを前記隣接マーカとして特定することを特徴とする自律作業機の制御方法。 - コンピュータを、請求項1乃至23の何れか1項に記載の自律作業機として機能させるためのプログラム。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2019/028902 WO2021014586A1 (ja) | 2019-07-23 | 2019-07-23 | 自律作業機、自律作業機の制御方法及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2021014586A1 JPWO2021014586A1 (ja) | 2021-01-28 |
| JP7410150B2 true JP7410150B2 (ja) | 2024-01-09 |
Family
ID=74193557
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021534463A Active JP7410150B2 (ja) | 2019-07-23 | 2019-07-23 | 自律作業機、自律作業機の制御方法及びプログラム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20220137632A1 (ja) |
| EP (1) | EP4006682A4 (ja) |
| JP (1) | JP7410150B2 (ja) |
| WO (1) | WO2021014586A1 (ja) |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008065755A (ja) | 2006-09-11 | 2008-03-21 | Hitachi Ltd | 移動装置 |
| US20160100522A1 (en) | 2014-10-10 | 2016-04-14 | Irobot Corporation | Robotic Lawn Mowing Boundary Determination |
| US20160178382A1 (en) | 2014-12-18 | 2016-06-23 | Nissan North America, Inc. | Marker aided autonomous vehicle localization |
| JP2016186748A (ja) | 2015-03-27 | 2016-10-27 | 本田技研工業株式会社 | 無人作業車の制御装置 |
| JP2017091246A (ja) | 2015-11-11 | 2017-05-25 | 有限会社曽田農機設計事務所 | 刈取ロボット及びそれを用いた自動刈取システム |
| JP2017107456A (ja) | 2015-12-10 | 2017-06-15 | 国立大学法人豊橋技術科学大学 | 自律走行ロボットシステム |
| JP2017158532A (ja) | 2016-03-03 | 2017-09-14 | 株式会社リコー | 農作業用装置および農作業用装置の制御方法 |
| WO2017187881A1 (ja) | 2016-04-28 | 2017-11-02 | 愛知製鋼株式会社 | 運転支援システム |
| WO2019124225A1 (ja) | 2017-12-18 | 2019-06-27 | 株式会社クボタ | 農作業車、作業車衝突警戒システム及び作業車 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2885683A4 (en) * | 2012-08-14 | 2016-06-01 | Husqvarna Ab | LIMIT DEFINITION SYSTEM FOR A ROBOTIC VEHICLE |
| US9298188B2 (en) * | 2013-01-28 | 2016-03-29 | Caterpillar Inc. | Machine control system having autonomous edge dumping |
| EP2884364B1 (en) * | 2013-12-12 | 2018-09-26 | Hexagon Technology Center GmbH | Autonomous gardening vehicle with camera |
| US9868211B2 (en) * | 2015-04-09 | 2018-01-16 | Irobot Corporation | Restricting movement of a mobile robot |
| JP2019004792A (ja) * | 2017-06-26 | 2019-01-17 | 株式会社クボタ | 作業場の走行管理システム |
| JP6876547B2 (ja) * | 2017-07-03 | 2021-05-26 | ヤンマーパワーテクノロジー株式会社 | 自律走行システム |
-
2019
- 2019-07-23 JP JP2021534463A patent/JP7410150B2/ja active Active
- 2019-07-23 EP EP19938953.7A patent/EP4006682A4/en active Pending
- 2019-07-23 WO PCT/JP2019/028902 patent/WO2021014586A1/ja unknown
-
2022
- 2022-01-18 US US17/577,916 patent/US20220137632A1/en active Pending
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008065755A (ja) | 2006-09-11 | 2008-03-21 | Hitachi Ltd | 移動装置 |
| US20160100522A1 (en) | 2014-10-10 | 2016-04-14 | Irobot Corporation | Robotic Lawn Mowing Boundary Determination |
| US20160178382A1 (en) | 2014-12-18 | 2016-06-23 | Nissan North America, Inc. | Marker aided autonomous vehicle localization |
| JP2016186748A (ja) | 2015-03-27 | 2016-10-27 | 本田技研工業株式会社 | 無人作業車の制御装置 |
| JP2017091246A (ja) | 2015-11-11 | 2017-05-25 | 有限会社曽田農機設計事務所 | 刈取ロボット及びそれを用いた自動刈取システム |
| JP2017107456A (ja) | 2015-12-10 | 2017-06-15 | 国立大学法人豊橋技術科学大学 | 自律走行ロボットシステム |
| JP2017158532A (ja) | 2016-03-03 | 2017-09-14 | 株式会社リコー | 農作業用装置および農作業用装置の制御方法 |
| WO2017187881A1 (ja) | 2016-04-28 | 2017-11-02 | 愛知製鋼株式会社 | 運転支援システム |
| WO2019124225A1 (ja) | 2017-12-18 | 2019-06-27 | 株式会社クボタ | 農作業車、作業車衝突警戒システム及び作業車 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4006682A4 (en) | 2023-05-10 |
| WO2021014586A1 (ja) | 2021-01-28 |
| JPWO2021014586A1 (ja) | 2021-01-28 |
| US20220137632A1 (en) | 2022-05-05 |
| EP4006682A1 (en) | 2022-06-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112584697B (zh) | 使用视觉系统的自主机器导航和训练 | |
| AU2019208265B2 (en) | Moving robot, method for controlling the same, and terminal | |
| EP3698618A1 (en) | Smart lawn mowing system | |
| EP3603370A1 (en) | Moving robot, method for controlling moving robot, and moving robot system | |
| CN106227212B (zh) | 基于栅格地图和动态校准的精度可控室内导航系统及方法 | |
| EP2296072A2 (en) | Asymmetric stereo vision system | |
| KR20200015877A (ko) | 이동 로봇 및 그 제어방법 | |
| CN111199677B (zh) | 一种室外区域的工作地图自动建立方法,装置,存储介质及工作设备 | |
| CN107562054A (zh) | 基于视觉、rfid、imu和里程计的自主导航机器人 | |
| CN113115621B (zh) | 智能割草系统及其自主建图方法 | |
| CN114322980A (zh) | 获取位置坐标及绘制电子地图的方法、计算机可读存储介质和自主作业设备 | |
| CN115454077A (zh) | 自动割草机及其控制方法和计算机可读存储介质 | |
| JP7462642B2 (ja) | 自律作業機、制御装置、自律作業機の制御方法、制御装置の動作方法及びプログラム | |
| JP7410150B2 (ja) | 自律作業機、自律作業機の制御方法及びプログラム | |
| EP3769598B1 (en) | Placement position notification system | |
| EP4206849A1 (en) | Autonomous mobile device and method for controlling same | |
| CN111158356B (zh) | 自动割草机及其控制方法 | |
| CN114937258B (zh) | 割草机器人的控制方法、割草机器人以及计算机存储介质 | |
| CN115042806A (zh) | 一种代客泊车的路径显示方法、装置及电子设备 | |
| CN114550488A (zh) | 一种基于机器人的空车位巡逻方法及装置 | |
| WO2024051733A1 (zh) | 自移动机器人的控制系统、建图方法、进停靠站方法和出停靠站方法 | |
| US20230320263A1 (en) | Method for determining information, remote terminal, and mower | |
| WO2023121528A1 (en) | Improved navigation for a robotic work tool system | |
| WO2020105125A1 (ja) | 自律作業機、自律作業機の制御方法及びプログラム | |
| SE2250557A1 (en) | Navigation for a robotic work tool system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220121 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230224 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230418 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230718 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20231204 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231221 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7410150 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |